WO2019015485A1 - 确定运动轨迹的方法和装置 - Google Patents
确定运动轨迹的方法和装置 Download PDFInfo
- Publication number
- WO2019015485A1 WO2019015485A1 PCT/CN2018/094740 CN2018094740W WO2019015485A1 WO 2019015485 A1 WO2019015485 A1 WO 2019015485A1 CN 2018094740 W CN2018094740 W CN 2018094740W WO 2019015485 A1 WO2019015485 A1 WO 2019015485A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- filtered
- points
- point
- original track
- original
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/393—Trajectory determination or predictive tracking, e.g. Kalman filtering
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/13—Receivers
- G01S19/14—Receivers specially adapted for specific applications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/40—Correcting position, velocity or attitude
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
- G06T7/207—Analysis of motion for motion estimation over a hierarchy of resolutions
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
- G06T7/215—Motion-based segmentation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L67/00—Network arrangements or protocols for supporting network services or applications
- H04L67/50—Network services
- H04L67/535—Tracking the activity of the user
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/28—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network with correlation of data from several navigational instruments
- G01C21/30—Map- or contour-matching
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/50—Determining position whereby the position solution is constrained to lie upon a particular curve or surface, e.g. for locomotives on railway tracks
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10016—Video; Image sequence
Definitions
- the present application relates to the field of information technology and, more particularly, to a method and apparatus for determining a motion trajectory.
- Map matching is an error correction technique for moving trajectory data. Based on the pattern recognition theory, the technology can be based on the assumption that the vehicle is always on the road. The basic idea is to combine the trajectory of the vehicle positioning with the road network in the digital map. The vehicle position information measured by the positioning method is compared and matched with the electronic map data of the navigation system to find the road segment where the vehicle is located. Positioning technology combined with map matching technology can effectively reduce the error caused by positioning sampling, greatly improve the positioning accuracy of vehicles, and has been widely used in global positioning system (GPS) navigation, traffic flow analysis and other fields.
- GPS global positioning system
- map matching based on Hidden Markov Model has the best accuracy and robustness.
- the method is mainly designed for small error trajectories, such as GPS trajectory, and its error is at the level of 10m, and the matching accuracy can achieve ideal results.
- the base station positioning data acquisition is relatively simple, and the user's mobile phone is very popular, and the GPS switch needs to be actively turned on without GPS positioning, the amount of data obtained is also large, and contains rich information, so a base station positioning data is proposed.
- Map matching technology is necessary. If the existing HMM map matching algorithm is adopted, the error of the large error trajectory of the base station trajectory data is at the level of 100 m, and the matching accuracy is not satisfactory.
- the present application provides a method and apparatus for determining a motion trajectory that is capable of filtering trajectory points that may have a negative effect in the process of matching a modified map.
- a method for determining a motion trajectory comprising: acquiring a position of n original trajectory points P 1 to P n of a mobile terminal during motion, wherein the mobile terminal passes the n original trajectories The time of the i-th original track point P i in the points P 1 to P n is earlier than the time when the i+1th original track point P i+1 is passed, n is a positive integer; the n original track points P 1 are P n filter processing, the filtering processing for deleting the original track number n at least one original points P 1 to P n track point of, and / or update the original trajectory of the n points P 1 to P n at least one of Position of the original track point; determining a motion track of the mobile terminal on at least one road in the road map according to the target track point obtained by performing the filtering process on the n original track points P 1 to P n , the road map includes Multiple roads.
- m target trajectory points are obtained by performing at least one filtering process on the n original trajectory points in the process of acquiring the mobile terminal, and then the m target trajectory points are performed on the m target trajectory points.
- the road map is matched, and the motion trajectory of the mobile terminal is obtained, which can filter or change the trajectory point of the original trajectory point with large error and negative effect, so that the processed target trajectory point is more accurate when performing map matching, especially for
- the high-noise data acquisition method of the base station positioning and the special situation of rapid positioning make the subsequent map matching process more accurate, and the obtained motion trajectory is more in line with the actual situation.
- the server may acquire the positions of the n original track points P 1 to P n of the mobile terminal during the motion, wherein the n original track points P 1 to P n may be among the plurality of track points collected by the base station. All the track points or part of the track points, for example, the server can acquire all the track points collected by the base station, and the n original track points P 1 to P n are all the track points; or the server can process the entire track points.
- the n original track points P 1 to P n may be part of the track points obtained by the server processing all the original track points.
- the base station collects the track points of the mobile terminal during the motion, and may use the same sampling time. For example, the same time interval is used to acquire the position of the track point at each time, or different sampling time may be used, that is, At different time intervals, the location of the track point where the mobile terminal moves is collected.
- the filtering process in the method may include at least one of difference filtering, velocity filtering, angle filtering, distortion filtering, tail-cutting mean filtering, and over-point filtering, wherein the speed filtering, The angle filtering, the distortion filtering, and the near-point filtering may be used to delete at least one of the n original track points P 1 to P n , and the difference filtering and the tailing mean filtering may be used to update the n originals. The position of at least one of the track points P 1 to P n .
- the n original track points P 1 to P n are subjected to filtering processing, including: performing difference between the n original track points P 1 to P n A filtering process for rearranging points where the positions coincide, that is, updating the position of the coincident points.
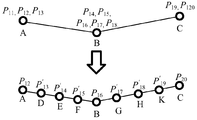
- the n original track points P 1 to P n are filtered, including: at the n original track points P 1 Obtaining a point to be filtered P x to P x+a-1 to P n , the a points to be filtered P x to P x+a-1 are located at the first position, and x and a are positive integers; Obtaining b points to be filtered P x+a to P x+a+b-1 from the original track points P 1 to P n , the b points to be filtered P x+a to P x+a+b-1 are located a second position, b is a positive integer greater than 1, and c points to be filtered P x+a+b to P x+a+b+c-1 are obtained in the n original track points P 1 to P n c points to be filtered P x+a+b to P x+a+b+c-1 are obtained in the n original track points P 1 to P n c points to be filtered P
- the points to be filtered are evenly arranged on the straight line from the first position to the second position. to Including: the point to be filtered in the first position In the second position, the point to be filtered The straight line between the first position and the second position is equally divided according to the distance, and the points to be filtered are sequentially arranged. to Between each point to be filtered.
- the points to be filtered are evenly arranged on the straight line from the second position to the third position.
- the straight line between the second position and the third position is equally divided according to the distance, and the points to be filtered are sequentially arranged. to Between each point to be filtered.
- the difference filtering the coincident track points can be rearranged, and the positions of the partial track points are updated, so that the track point distribution is more uniform.
- the n original track points P 1 to P n are filtered, including: the n original track points P 1
- the speed filtering process is performed to P n , and the speed filtering process is used for filtering a point having a large speed, for example, a point at which the speed is greater than or equal to the preset speed can be filtered out.
- the filtering process of the n original track points P 1 to P n includes: acquiring n original track points P 1 to The speed of the first to-be-filtered point P a in P n , a is a positive integer less than or equal to n; if the speed of the first to-be-filtered point P a is greater than or equal to a preset speed, deleting the first to-be-filtered point P a .
- the preset speed may be set according to the actual situation, for example, according to the average speed setting of the mobile terminal during the whole motion, or according to the speed of the mobile terminal in a certain period of time or distance, the embodiment of the present application Not limited to this.
- the n original track points P 1 to P n are filtered, including: the n original track points P 1
- An angle filtering process is performed to P n for deleting the vertices of the angle at which the partial angle is greater than or equal to the preset angle.
- the n original track points P 1 to P n are filtered, including: at the n original track points P 1 Obtaining 4 points to be filtered P c , P c+1 , P c+2 and P c+3 to P n , c is a positive integer, c+3 is less than or equal to n; determining the first angle ⁇ P c P c +1 P c+2 and a second angle ⁇ P c+1 P c+2 P c+3 ; if the first angle is less than or equal to the first preset angle and the second angle is less than or equal to the second preset angle And deleting the points to be filtered P c+1 or the points to be filtered P c+2 in the four points to be filtered P c , P c+1 , P c+2 and P c+3 .
- the preset angle may be set according to an actual situation, wherein the first preset angle and the second preset angle may be set to be the same or different, and the embodiment of the present application is not limited thereto.
- the n original track points P 1 to P n are filtered, including: the n original track points P 1
- the distortion filtering process is performed to P n , and the distortion filtering process can delete a portion where the partial distortion is excessive.
- the n original track points P 1 to P n are filtered, including: at the n original track points P 1 To P n , obtain 2 ⁇ +1 points to be filtered P f- ⁇ to P f+ ⁇ , f and ⁇ are positive integers, f is greater than ⁇ ; and determine 2 ⁇ +1 points to be filtered P f- ⁇ to P f + ⁇
- the distance between the point to be filtered P g and the adjacent point to be filtered P g+1 , g takes f- ⁇ to f+ ⁇ -1, and obtains 2 ⁇ distances; determines the 2 ⁇ +1 points to be filtered
- the distance between the first filter point P f- ⁇ and the last filter point P f+ ⁇ in P f- ⁇ to P f+ ⁇ is a first distance; determining the sum of the 2 ⁇ distances and the first List of twist distance; when the twist is greater than or equal to a preset degree of twist, the delete pending
- the server may traverse each point in the n original track points P 1 to P n , where any one track point P f is taken as an example. Centering on the to-be-filtered point P f , the half-window size is set to ⁇ , that is, the ⁇ -to-filter points are taken before and after P f among the n original track points P 1 to P n centering on the point P f to be filtered. A total of 2 ⁇ +1 points to be filtered P f- ⁇ to P f+ ⁇ are obtained . The distance between the two points to be filtered in the 2 ⁇ +1 points to be filtered P f- ⁇ to P f+ ⁇ is determined, and all the distances are summed.
- the distance is called The first distance
- the degree of distortion of the point to be filtered P f is equal to the quotient of the sum of the above 2 ⁇ distances and the first distance.
- the preset distortion ⁇ can be set according to actual conditions, and the distortion ⁇ can generally be set to satisfy ⁇ ⁇ 1.
- the mobile terminal Since the mobile terminal is moving on the road network, its trajectory should be a smoother line segment, that is, the corresponding distortion is smaller, that is, it is close to 1. If there is a serious distortion, it is likely that the sampling error is caused. Therefore, it is necessary to perform filtering, and the distortion filtering can filter out a part of large error points.
- the n original track points P 1 to P n are filtered, including: the n original track points P 1
- the cut-end mean filtering process is performed to P n , and the cut-end mean filtering process can update the coordinates of some or all of the track points.
- the n original track points P 1 to P n are filtered, including: at the n original track points P 1 To P n , obtain 2 ⁇ +1 points to be filtered P l- ⁇ to P l+ ⁇ , l and ⁇ are positive integers, l is greater than ⁇ ; at the 2 ⁇ +1 points to be filtered P l- ⁇ to P l In + ⁇ , the average value of the longitude of each of the k points to be filtered is determined, and the average of the latitudes of each of the h points to be filtered, k and h are less than 2 ⁇ +1 integer; the average value of the average of the latitude and longitude are determined as the filtered pending 2 ⁇ + 1 P l- ⁇ to the point P l + ⁇ ⁇ + 1 in the first filtered point P l pending latitude and longitude.
- the filtering process of the n original track points P 1 to P n includes: establishing a Cartesian coordinate system, the Cartesian coordinate system The X axis in the horizontal direction and the Y axis in the vertical direction are included; coordinates of each of the original track points P 1 to P n are determined; in the n original track points P 1 to P n , 2 ⁇ is acquired +1 points to be filtered P l- ⁇ to P l+ ⁇ , l and ⁇ are positive integers, l is greater than ⁇ ; in the 2 ⁇ +1 points to be filtered P l- ⁇ to P l+ ⁇ , k are determined The average of the X-axis coordinates of each point to be filtered in the point to be filtered, and the average of the Y-axis coordinates of each of the points to be filtered, k and h are positive integers less than 2 ⁇ +1; and the average value of the average of
- k points to be filtered and h points to be filtered are determined, and the k points to be filtered and h points to be filtered may be The continuous values may be discontinuous.
- the values of k and h may be equal or unequal.
- the k points to be filtered and the points to be filtered may be the same point or different points.
- each of the 2 ⁇ +1 to-be-filtered points may be first according to the first to be filtered points.
- the size of the coordinate value is arranged.
- the first coordinate may refer to the longitude value or the X-axis coordinate, and the partial maximum and minimum values are removed, and only k to-be-filtered points of the intermediate size are taken; similarly, each of the points to be filtered is followed.
- the size of the second coordinate value is arranged, and the second coordinate may refer to the latitude value or the Y-axis coordinate, and the partial maximum and minimum values are removed, and only the h-th to-filter points of the intermediate size are taken.
- the cut-end mean filtering process may be performed on each of the n original track points P 1 to P n , or the tail track mean filtering process may be performed on some track points, for example, only part of The cut-off mean filtering process is performed at a point where the coordinate value changes greatly.
- the difference threshold may be set. When the coordinate value change amount is less than the difference threshold, it is determined that the coordinate value change is small, and the tail-cut mean filtering is not performed, but the embodiment of the present application is not limited thereto.
- the tail-tailed mean filtering can adjust the coordinates of the current point by adjusting the positions of several points before and after, so that the shape of the track is more smooth, which helps the subsequent map matching.
- the n original track points P 1 to P n are filtered, including: the n original track points P 1
- the near point filtering process is performed to P n
- the near point filtering process is used to delete track points that are closer in distance.
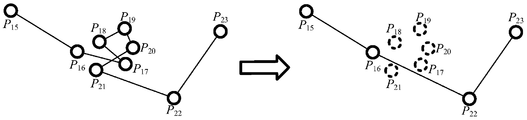
- the n original track points P 1 to P n are filtered, including: at the n original track points P 1 Obtaining the yth to-be-filtered point P y and the y+1th to-be-filtered point P y+1 to P n ; if the yth to-be-filtered point P y and the y+1th to-be-filtered point P y+ The distance between 1 is less than or equal to the preset distance, and the yth to-be-filtered point P y and/or the y+1th to-be-filtered point P y+1 are deleted.
- the n original track points P 1 to P n are filtered, including: at the n original track points P 1 to P n acquired in the first y-1 pending filtered point P y-1, y-th to be filtered points P y and y + 1 pending filtered point P y + 1; if the first y-1 pending filtered points The distance between P y-1 and the yth to-be-filtered point P y is less than or equal to a preset distance, and the yth to-be-filtered point P y and the y+1th to-be-filtered point P y+1 the distance between the predetermined distance is less than or equal to, delete the y-th point P y to be filtered; otherwise leave the filter to be point P y.
- the over-near-point filtering process can eliminate the positioning error caused by the moving speed of the mobile terminal being too slow or stationary and the influence on the map matching, thereby solving the problem that the mobile terminal stays and causes the positioning point to drift.
- the mobile terminal may be a vehicle, and parking or deceleration may occur during running of the vehicle, and the near-point filtering process may eliminate positioning errors caused by the vehicle stopping or decelerating.
- the filtering process may include at least one of the foregoing difference filtering, velocity filtering, angle filtering, distortion filtering, tail-cutting mean filtering, and over-point filtering
- the filtering process includes at least two filtering processes. During the process, for the n original track points P 1 to P n in any non-first filtering process, the remaining track points after the last filtering process may be renumbered.
- the differential filtering, the velocity filtering, the angular filtering, the distortion filtering, the tail-cutting mean filtering, and the near-point filtering may be arbitrarily selected.
- the difference filtering since the process is similar, only one of them can be selected for execution.
- the difference filtering since the difference filtering is more complicated and the original track points are less likely to overlap completely, the difference filtering may be selected not to be performed.
- the difference filtering may be set to the first filtering, and then other filtering processes are performed.
- the road map is acquired, and each of the plurality of roads in the road map includes only two endpoints, and does not include any Kushiro.
- the n original track points P 1 to P n are filtered, including: n the original track points P 1 to P n performs filtering processing to obtain m target track points, and m is a positive integer less than or equal to n.
- determining, according to the target trajectory point obtained by performing the filtering process on the n original trajectory points P 1 to P n , determining that the mobile terminal is in the a motion trajectory on at least one road in the road map comprising: matching the m target trajectory points with m points on the road in the road map, the m points being arranged in chronological order; according to the m A road occupied by the point determines a motion trajectory of the mobile terminal on the at least one road.
- determining, according to the target trajectory point obtained by performing the filtering process on the n original trajectory points P 1 to P n , determining that the mobile terminal is in the a motion track on at least one road in the road map comprising: acquiring a first point and a second point that are consecutive in time among the m points, the time of the first point being earlier than the time of the second point; The first point and the second point are on the same road, determining that the trajectory of the mobile terminal moves from the first point to the second point along the same road; if the first point is located on the first road, the second point Located on the second road, the first road is different from and connected to the second road, and determining that the trajectory of the mobile terminal moves along the first point on the first road to the second point on the second road; The first point is located on the first road, the second point is located on the second road, the first road is different from the second road and is not connected, and the end point
- the shortest path of the road in the road map and Determining that the trajectory of the mobile terminal moves along the first point on the first road to the end point of the first road, reaches the starting point of the second road through the shortest path, and moves to the second through the starting point of the second road The second point on the road.
- m target trajectory points are obtained by performing at least one filtering process on the n original trajectory points in the process of acquiring the mobile terminal, and then the m target trajectory points are performed on the m target trajectory points.
- the road map is matched, and the motion trajectory of the mobile terminal is obtained, which can filter or change the trajectory point of the original trajectory point with large error and negative effect, so that the processed target trajectory point is more accurate when performing map matching, especially for
- the high-noise data acquisition method of the base station positioning and the special situation of rapid positioning make the subsequent map matching process more accurate, and the obtained motion trajectory is more in line with the actual situation.
- apparatus for determining a motion trajectory for performing the method of any of the above first aspect or any of the possible implementations of the first aspect.
- the apparatus comprises means for performing the method of any of the above-described first aspect or any of the possible implementations of the first aspect.
- a third aspect provides an apparatus for determining a motion trajectory, comprising: a storage unit for storing instructions, the processor for executing instructions stored by the memory, and when the processor executes the memory storage The execution causes the processor to perform the method of the first aspect or any of the possible implementations of the first aspect.
- a computer readable medium for storing a computer program comprising instructions for performing the method of the first aspect or any of the possible implementations of the first aspect.
- a fifth aspect provides a computer program product comprising instructions for performing a determination of a motion trajectory in any of the possible implementations of the first aspect or the first aspect when the computer runs the instruction of the computer program product method.
- the computer program product can be run on the apparatus for determining the motion trajectory of the third aspect above.
- FIG. 1 is a schematic flow chart of a method of determining a motion trajectory according to an embodiment of the present application.
- FIG. 2 is a schematic diagram of differential filtering in accordance with an embodiment of the present application.
- FIG. 3 is a schematic diagram of velocity filtering in accordance with an embodiment of the present application.
- FIG. 4 is a schematic illustration of angle filtering in accordance with an embodiment of the present application.
- FIG. 5 is a schematic diagram of distortion filtering according to an embodiment of the present application.
- FIG. 6 is a schematic diagram of tail-cutting mean filtering in accordance with an embodiment of the present application.
- FIG. 7 is a schematic diagram of over-point filtering according to an embodiment of the present application.
- FIG. 8 is a schematic diagram of a road map matching method according to an embodiment of the present application.
- FIG. 9 is another schematic diagram of a road map matching method according to an embodiment of the present application.
- FIG. 10 is a schematic block diagram of an apparatus for determining a motion trajectory according to an embodiment of the present application.
- FIG. 11 is another schematic block diagram of an apparatus for determining a motion trajectory according to an embodiment of the present application.
- GSM Global System of Mobile communication
- CDMA Code Division Multiple Access
- WCDMA Wideband Code Division Multiple Access
- GPRS General Packet Radio Service
- LTE Long Term Evolution
- FDD Frequency Division Duplex
- TDD Time Division Duplex
- UMTS Universal Mobile Telecommunication System
- WiMAX Worldwide Interoperability for Microwave Access
- the mobile terminal may include, but is not limited to, a mobile station (Mobile Station, MS), a mobile terminal (Mobile Terminal), a mobile phone (Mobile Telephone), a user equipment (User Equipment, UE), and a mobile phone (handset).
- a portable device, a vehicle, etc. the mobile terminal can communicate with one or more core networks via a Radio Access Network (RAN), for example, the mobile terminal can be a vehicle, or It is a portable, pocket-sized, hand-held, built-in computer or mobile device.
- RAN Radio Access Network
- the embodiment of the present application further relates to a base station, where the base station can collect motion trajectories of the mobile terminal during the mobile process.
- the base station can multiplex the existing base station, that is, can be deployed in the radio access network.
- the base station may include various forms of macro base stations, micro base stations, relay stations, access points, and the like.
- the names of devices with base station functionality may vary. For example, in an LTE network, referred to as an evolved Node B (eNB or eNodeB), in a 3rd generation (3G) network, called a Node B (Node B), etc.
- eNB evolved Node B
- 3G 3rd generation
- FIG. 1 is a schematic flowchart of a method 100 for determining a motion trajectory according to an embodiment of the present application.
- the method 100 may be performed by a server, such as a positioning server, which may acquire a movement trajectory of a mobile terminal collected by a base station.
- the data is processed and related to the data.
- the positioning server may also be the base station, and the embodiment of the present application is not limited thereto.
- the following description will be made by taking the method 100 as an example.
- the method 100 includes: S110, acquires the position of n points original trajectory during the movement of the mobile terminal of P 1 to P n, wherein, the mobile terminal through the original trajectory of n points P 1 to P The time of the i-th original track point P i in n is earlier than the time when the i+1th original track point P i+1 is passed, and n is a positive integer.
- the mobile terminal may collect the motion track of the mobile terminal by the base station, and acquire the positions of the plurality of track points.
- the server may acquire the n original track points of the mobile terminal during the motion. a position of P 1 to P n , wherein the n original track points P 1 to P n may be all track points or partial track points of the plurality of track points collected by the base station, for example, the server may acquire all the collected by the base station
- the track points, the n original track points P 1 to P n are all the track points; or the server can process all the track points, the n original track points P 1 to P n can be the server processing original
- the portion of the track point obtained by the track point is not limited to this embodiment.
- the mobile terminal may be located at different locations, and the base station collects track points during the motion of the mobile terminal, and each track point includes the time when the mobile terminal passes the track point, and the server Obtaining the n original track points P 1 to P n of the mobile terminal may be arranged according to the time when the mobile terminal passes the original track point, for example, the i-th original track point P i of the n original track points P 1 to P n The time is earlier than the time when the i+1th original track point P i+1 is passed.
- the base station collects the track points of the mobile terminal during the motion, and may use the same sampling time. For example, the same time interval is used to acquire the position of the track point at each time, or different sampling time may be used, that is, At different time intervals, the location of the track point where the mobile terminal moves is collected.
- the method 100 further includes: S120, performing filtering processing on the n original track points P 1 to P n , where the filtering process may be used to delete the n original track points P 1 to P n at least one original track point, and / or update the original position of the n tracks at least one original point P 1 to a locus of points P n in.
- the filtering process may include at least one of difference filtering, velocity filtering, angle filtering, distortion filtering, tail-cutting mean filtering, and over-point filtering, wherein the speed filtering, the angle filtering, The distortion filtering and the near-point filtering may be used to delete at least one of the original trajectory points P 1 to P n , and the difference filtering and the tail-cut averaging filtering may be used to update the n original trajectory points P The position of at least one of the original track points from 1 to P n .
- the n original track points P 1 to P n are subjected to filtering processing, and the filtering process may be difference filtering.
- the server acquires a to-be-filtered points P x to P x+a-1 among the n original track points P 1 to P n , and the a to-be-filtered points P x to P x+a-1 are located at the A position, x and a are positive integers, that is, for a greater than 1, the a points to be filtered P x to P x+a-1 are completely coincident at the first position.
- the b points to be filtered P x+a to P x+a+b-1 is located at the second position, and b is a positive integer greater than 1, that is, the b points to be filtered Px +a to Px +a+b-1 completely coincide at the second position.
- the c points to be filtered P x+a+b to P x+a+b+c-1 in the n original track points P 1 to P n the c points to be filtered P x+a+b To P x+a+b+c-1 is located at the third position, c is a positive integer, and x+a+b+c-1 is less than or equal to n, that is, for c greater than 1, the c points to be filtered P x +a+b to P x+a+b+c-1 completely coincide at the third position.
- the straight line connecting the second position to the third position uniformly aligns the points to be filtered on the straight line from the second position to the third position to Wherein, in the second position, the point to be filtered In the third position, the point to be filtered
- the straight line between the second position and the third position is equally divided according to the distance, and the points to be filtered are sequentially arranged. to Between each point to be filtered, Indicates rounding down.
- FIG. 2 shows a schematic diagram of difference filtering in accordance with an embodiment of the present application.
- Let b 5 and the second position be point B, that is, the b points to be filtered are P 14 , P 15 , P 16 , P 17 and P 18 at point B; take n of the original original track points
- the coincident points can be rearranged, and the positions of the partial track points are updated, so that the track point distribution is more uniform.
- the n original track points P 1 to P n are subjected to filtering processing, and the filtering process may be speed filtering.
- the server acquires raw track point P n to be filtered, a first point P 1 to P a n of the speed, until the first point P a filter may in turn take the original track number n points P 1 to P n of Each track point; if the speed of the first point to be filtered P a is greater than or equal to the preset speed, the first point to be filtered P a is deleted.
- Figure 3 shows a schematic diagram of velocity filtering in accordance with an embodiment of the present application.
- the first to-be-filtered point P a may sequentially take each of the n original track points P 1 to P n , where the first to-be-filtered point is P 9 as an example.
- the speed of P 9 can be determined by determining the speed at which the average speed from P 8 to P 9 is P 9 , or determining the speed from P 9 to P 10 to an average speed of P 9 . If the speed is 9 P greater than or equal the preset speed, as shown in FIG 3, P 9 may be deleted; if the velocity is less than the preset speed P9, P 9 is retained.
- the preset speed may be set according to the actual situation, for example, according to the average speed setting of the mobile terminal during the whole motion, or according to the speed of the mobile terminal in a certain period of time or distance, the embodiment of the present application Not limited to this.
- the n original track points P 1 to P n are subjected to filtering processing, and the filtering process may be angle filtering.
- the angle filtering may be used to filter the vertices of the angle greater than or equal to the preset angle.
- the server may acquire 4 points to be filtered P c , P c among the n original track points P 1 to P n .
- Figure 4 shows a schematic diagram of angular filtering in accordance with an embodiment of the present application.
- four points to be filtered are obtained from the n original track points P 1 to P n , and P 13 , P 14 , P 15 and P 16 are taken as an example.
- the preset angle may be set according to an actual situation, wherein the first preset angle and the second preset angle may be set to be the same or different, and the embodiment of the present application is not limited thereto.
- the n original track points P 1 to P n are subjected to filtering processing, and the filtering process may be a distortion degree filtering.
- the server acquires 2 ⁇ +1 points to be filtered P f- ⁇ to P f+ ⁇ among the n original track points P 1 to P n , f and ⁇ are positive integers, and f is greater than ⁇ .
- 2 ⁇ + 1 determines that the pending filtered points P f- ⁇ to P f + ⁇ to be filtered to any one of the adjacent point P g P g + to be filtered point distance between the 1, g f- ⁇ were taken to f
- a total of 2 ⁇ distances can be obtained for each of + ⁇ -1; the first filter to be filtered P f- ⁇ and the last one to be filtered are determined for the 2 ⁇ +1 points to be filtered P f- ⁇ to P f+ ⁇
- the distance between the points P f+ ⁇ is the first distance; determining the quotient of the sum of the 2 ⁇ distances and the first distance is a distortion degree; when the distortion degree is greater than or equal to the preset distortion degree, deleting the 2 ⁇ +1 filtered pending points P f- ⁇ to P f + ⁇ ⁇ + 1 th first be filtered points P f.
- the server may traverse each point in the n original track points P 1 to P n , where any one track point P f is taken as an example. Centering on the to-be-filtered point P f , the half-window size is set to ⁇ , that is, the ⁇ -to-filter points are taken before and after P f among the n original track points P 1 to P n centering on the point P f to be filtered. A total of 2 ⁇ +1 points to be filtered P f- ⁇ to P f+ ⁇ are obtained . The distance between the two points to be filtered in the 2 ⁇ +1 points to be filtered P f- ⁇ to P f+ ⁇ is determined, and all the distances are summed.
- the distance is called The first distance
- the degree of distortion of the point to be filtered P f is equal to the quotient of the sum of the above 2 ⁇ distances and the first distance, that is, the distortion degree tot (P f ) of the point to be filtered P f can be calculated by the following formula :
- dist(A, B) represents the distance between two points of AB.
- the preset distortion ⁇ can be set according to actual conditions.
- the distortion ⁇ can be set to satisfy ⁇ ⁇ 1, but the embodiment of the present application is not limited thereto.
- Figure 5 shows a schematic diagram of distortion filtering in accordance with an embodiment of the present application.
- the server traverses each track point in the n original track points P 1 to P n , where the point to be filtered P 24 is taken as an example for description.
- the mobile terminal Since the mobile terminal is moving on the road network, its trajectory should be a smoother line segment, that is, the corresponding distortion is smaller, that is, it is close to 1. If there is a serious distortion, it is likely that the sampling error is caused. Therefore, it is necessary to perform filtering, and the distortion filtering can filter out a part of large error points.
- the n original track points P 1 to P n are subjected to filtering processing, and the filtering process may be tail-cutting mean filtering.
- the server acquires 2 ⁇ +1 points to be filtered P l- ⁇ to P l+ ⁇ among the n original track points P 1 to P n , l and ⁇ are positive integers, and l is greater than ⁇ ; +1 points to be filtered P l- ⁇ to P l+ ⁇ , the position of each point to be filtered can be represented by at least two coordinate values, where the position of each point to be filtered is represented by two coordinate values As an example, the two coordinates are the first coordinate and the second coordinate, respectively.
- the first coordinate and the second coordinate average value of the average value is determined for each one to be filtered 2 ⁇ + 1 P l- ⁇ to the point P l l-th value of the first coordinate point P l to be filtered in the beta] + And the second coordinate value.
- k points to be filtered and h points to be filtered are determined, and the k points to be filtered and h points to be filtered may be The continuous values may be discontinuous.
- the values of k and h may be equal or unequal.
- the k points to be filtered and the points to be filtered may be the same point or different points.
- each of the 2 ⁇ +1 to-be-filtered points may be first according to the first to be filtered points.
- the size of the coordinate values is arranged, and the maximum and minimum values are removed, and only k points to be filtered in the middle size are taken; similarly, each point to be filtered is arranged according to the size of the second coordinate value, and the maximum and minimum parts are removed.
- the value is only the h points to be filtered in the middle size.
- At least two coordinate values of each of the 2 ⁇ +1 points to be filtered P l- ⁇ to P l+ ⁇ may be longitude coordinates and latitude coordinates.
- an average value of the longitudes of each of the k points to be filtered P m to P m+k-1 is determined,
- an average value of the latitudes of each of the h points to be filtered P m to P m+h-1 are respectively determined as the 2 ⁇ +1 points to be filtered
- At least two coordinate values of each of the 2 ⁇ +1 points to be filtered P l- ⁇ to P l+ ⁇ may refer to an X-axis coordinate and a Y-axis coordinate in a Cartesian coordinate system, where
- the origin (0, 0) of the Cartesian coordinate system can be set at any point, that is, the Cartesian coordinate system is established with any point as a reference.
- the position of the first track point P 1 among the n original track points P 1 to P n is used as the origin to establish a Cartesian coordinate system, with the horizontal direction being the X axis and the vertical direction being the Y axis, for the acquired 2 ⁇ +1.
- Each of the points to be filtered from the points to be filtered P l- ⁇ to P l+ ⁇ can determine the corresponding X-axis and Y-axis. Determining an average value of the X-axis coordinates of each of the k points to be filtered P m to P m+k-1 , and each of the h points to be filtered P m to P m+h-1 The average value of the Y-axis coordinates, the average value of the X-axis and the average value of the Y-axis coordinates are respectively determined as the 1st to-be-filtered point of the 2 ⁇ +1 points to be filtered P l- ⁇ to P l+ ⁇ The X-axis and Y-axis coordinates of P l .
- At least two coordinate values of each of the 2 ⁇ +1 to-be-filtered points P l- ⁇ to P l+ ⁇ may also be coordinate values in other coordinate systems, and no longer one by one. Narration.
- Figure 6 shows a schematic diagram of tail-tailed mean filtering in accordance with an embodiment of the present application.
- the Cartesian coordinate system takes the position of P 14 as the origin, the horizontal direction as the X axis, and the vertical direction as the Y axis.
- the maximum value and the minimum value, the remaining three coordinates are (2, 3, 4);
- the X new Y new new and the point P as a new coordinate values (3,0.23) X-axis and Y-axis 17, as shown in FIG 6, i.e., P 'is the location 17 updated.
- the cut-end mean filtering process may be performed on each of the n original track points P 1 to P n , or the tail track mean filtering process may be performed on some track points, for example, only part of The cut-off mean filtering process is performed at a point where the coordinate value changes greatly.
- the difference threshold may be set. When the coordinate value change amount is less than the difference threshold, it is determined that the coordinate value change is small, and the tail-cut mean filtering is not performed, but the embodiment of the present application is not limited thereto.
- the cut-off mean filtering may not be taken for the track point P 17 , and the P 17 is still used.
- Original coordinate value Assume that the Y-axis coordinate obtained here is not 0.23, but 1.9. Since 1.9 differs from the original coordinate value 2 by 0.1 and 0.1 is less than 0.5, the cut-off mean filtering may not be taken for the track point P 17 , and the P 17 is still used. Original coordinate value.
- the tail-tailed mean filtering can adjust the coordinates of the current point by adjusting the positions of several points before and after, so that the shape of the track is more smooth, which helps the subsequent map matching.
- the n original track points P 1 to P n are subjected to filtering processing, and the filtering process may be too near point filtering.
- the server acquires the yth to-be-filtered point P y and the y+1th to-be-filtered point P y+1 in the n original trajectory points P 1 to P n ; if the yth to-be-filtered point P y The distance between the y+1th to-be-filtered point P y+1 is less than or equal to the preset distance, and the yth to-be-filtered point P y and/or the y+1th to-be-filtered point P y+1 are deleted. ; otherwise the two points to be filtered P y and P y+1 are reserved.
- the server may further acquire the y-1th to-be-filtered point P y-1 , the yth to-be-filtered point P y , and the y+1th to be filtered in the n original trajectory points P 1 to P n Point P y+1 ; if the distance between the y- 1th filter point P y-1 and the yth filter point P y is less than or equal to a preset distance, and the yth filter point to be filtered P The distance between y and the y+1th to-be-filtered point P y+1 is also less than or equal to the preset distance, and the yth to-be-filtered point P y is deleted; otherwise, the to-be-filtered point P y is reserved.
- the preset distance may be set according to an actual situation.
- the preset distance may be set according to a moving speed and a sampling time of the mobile terminal, or may be further configured according to each of the n original track points P 1 to P n .
- the average value of the distance between the two points is set, and the embodiment of the present application is not limited thereto.
- Figure 7 shows a schematic diagram of over-point filtering in accordance with an embodiment of the present application.
- the y-th to-be-filtered point P y may sequentially take each of the n original track points P 1 to P n , where the points to be filtered P 15 to P 23 are taken as an example for description. Calculate the distance between each adjacent two points to be filtered in P 15 to P 23 respectively, assuming that only the distances of P 16 P 17 , P 17 P 18 , P 18 P 19 , P 19 P 20 and P 20 P 21 Less than or equal to the preset distance.
- P 16 P 17 can delete both P 16 and P 17 , and similarly, P 16 to P 21 need to be deleted.
- P 16 or P 17 can be deleted, and P 16 corresponding is deleted.
- the over-near-point filtering process can eliminate the positioning error caused by the moving speed of the mobile terminal being too slow or stationary and the influence on the map matching, thereby solving the problem that the mobile terminal stays and causes the positioning point to drift.
- the mobile terminal may be a vehicle, and parking or deceleration may occur during running of the vehicle, and the near-point filtering process may eliminate positioning errors caused by the vehicle stopping or decelerating.
- the filtering process in S120 may include at least one of the above-described difference filtering, speed filtering, angle filtering, distortion filtering, tail-cutting mean filtering, and over-point filtering, the filtering process includes at least two. During the filtering process, for the n original track points P 1 to P n in the non-first filtering process of any one time, the remaining track points after the last filtering process may be renumbered.
- the differential filtering, the velocity filtering, the angular filtering, the distortion filtering, the tail-cutting mean filtering, and the near-point filtering may be arbitrarily selected.
- the difference filtering since the process is similar, only one of them can be selected for execution.
- the difference filtering since the difference filtering is more complicated and the original track points are less likely to overlap completely, the difference filtering may be selected not to be performed.
- the difference filtering may be set to the first filtering, and then other filtering processes are performed.
- speed filtering, angle filtering, tail-cutting mean filtering, and over-point filtering may be performed in sequence in consideration of the final calculation effect.
- differential filtering, velocity filtering, distortion filtering, tail-cutting mean filtering, and near-point filtering may be performed in sequence.
- the method 100 further includes: S130, determining, according to the target trajectory point obtained by performing the filtering process on the n original trajectory points P 1 to P n , determining that the mobile terminal is on at least one road in the road map.
- the trajectory of the road, the road map includes multiple roads.
- the server acquires a road map, and the road map includes a plurality of roads.
- the road map in the embodiment of the present application can use various existing map original data.
- the world's largest open source map project OpenStreetMap can be used, which is abbreviated as OSM.
- OSM the world's largest open source map project
- the map original file downloaded by the OSM official website is in an XML format; or other map formats may be used, and the embodiment of the present application is not limited thereto.
- the road map may include multiple roads, and the road may be divided into many types, for example, may include: a motorway, a trunk, a residential area, and some cannot. Classified (unclassified) and so on. Wherein, if the mobile terminal is a vehicle, the plurality of roads can be divided into passable and unacceptable according to whether the vehicle can pass, for example, a road of a premium grade cannot pass the general vehicle.
- the road in the original map may be cut to obtain a road map including a plurality of roads, for example, according to the intersection of the road and the road directly, so that Each road in the obtained road map is the shortest road, that is, each road has only two nodes at the beginning and the end, and no road is included in the middle of the road.
- each road may be bidirectional or unidirectional. The embodiment of the present application is not limited thereto.
- the original map file in XML format downloaded by the OSM official website is taken as an example to perform road cutting to obtain a road map.
- Set the k value When the k value is “highway”, it means that the way corresponds to a road.
- the road level in the map can be divided into motorway, trunk, primary, secondary, tertiary, unclassified, residential and service from high to low, because the last two levels (residential and service) are vehicles that cannot pass.
- the mobile terminal is used as a vehicle, so when constructing and cutting the original map to obtain a road map, the two levels of roads can be ignored. Therefore, only the roads representing the passage of the vehicle will be retained here, ie the way the way the vehicles in the map can pass.
- any point can be identified by node in the original map.
- the nodes on the road are reserved, that is, the nodes on the road identified by node in the original map are retained, that is, if only two or more When the way passes through the same node at the same time, the node is reserved.
- the node is a node in the road network, and the other nodes are only used to describe the shape of the road segment, which can be ignored.
- each lane needs to be cut.
- the current way needs to be divided into two road segments by the node, so that the road segment is continuously divided until one road segment is guaranteed to have only two ends.
- the points are passed by multiple lanes.
- the cut road map can be obtained by the following algorithm 1.
- Algorithm 1 describes the flow of the road map construction algorithm, where N and W respectively represent the node and the way read from the OSM; V is the vertex set of the road map obtained after cutting, and E is the edge of the road map obtained after cutting Set; E' is a temporary edge set used to record the set of road segments that the current w is cut into.
- the behavior of the split(E,n) function means: for each edge in the edge set E, check if there is a road e passing n, if there is e passing n, then e is cut into two sides e 1 and e 2 according to n .
- the server acquires a road map including a plurality of roads, and matches each of the target trajectory points obtained by the filtering process with the roads in the road map to obtain at least one corresponding road.
- the filtering process is performed on the n original track points P 1 to P n to obtain m target track points, where m is less than or equal to n, and the m target track points are matched with the road map to obtain m roads, wherein The same road may exist in the m roads.
- m target trajectory points can be matched with roads by various algorithms, for example, considering accuracy and robustness, and road matching can be performed based on Hidden Markov Model (HMM).
- HMM map matching has the best accuracy and robustness.
- the HMM is a type of Markov chain whose state cannot be directly observed, but can be observed by the observation sequence, assuming that the nodes O 1 , O 2 , ..., O n are the observed sequences, and the HMM is assumed to be
- the observed sequences are generated by corresponding hidden states, corresponding to H 1 , H 2 , ..., H n is a hidden state sequence, and each hidden state is related to the previous hidden state, and is not related to the earlier hidden state. .
- the HMM map matching algorithm takes the real road segment corresponding to each observation point as a hidden state, and the mobile terminal regards it as a transition in the hidden state (ie, the transition of the road segment), and each hidden state generates an observed state (ie, the actually acquired target). Track point position).
- the path after the trajectory matching ie, the link sequence is obtained by finding the hidden state sequence of the maximum probability in a given observation state.
- FIG. 8 is a schematic diagram of a road map matching method according to an embodiment of the present application.
- r a ) the probability of radiation
- X i , a is a projection point of Z i on r a .
- the transition probability represents the probability of moving from the current state to the next state.
- the actual driving path is generally as close as possible to the shortest path, so the greater the difference between the distance on the road and the shortest distance, the lower the transition probability.
- dist (Z i , Z i + 1) is a target track point Z i and Z i + actual distance between 1; dist G (X i, a, X i + 1, b) as X i, a and X i + 1, the distance b on the road, i.e., from 8 X i in FIG. , the length of the gray polyline of a to X i+1,b .
- m roads are acquired according to the m target trajectory points; and the movement trajectory of the mobile terminal on the road map is determined according to the m roads.
- the movement trajectory of the mobile terminal on the road map can be determined by various algorithms.
- the adjacent target trajectory points Z i and Z i+1 are taken as an example to determine the actual travel path of the mobile terminal corresponding to the target trajectory points Z i and Z i+1 , where Z i
- the matched road is denoted as r i
- the track after Z i+1 is recorded as r i+1
- the actual road path of the mobile terminal determined by the server to move from Z i to Z i+1 is denoted as R i .
- the m roads corresponding to the m target trajectory points are matched according to the above manner, and at least one continuous road is obtained, that is, the motion trajectory of the mobile terminal on the road map.
- m target trajectory points are obtained by performing at least one filtering process on the n original trajectory points in the process of acquiring the mobile terminal, and then the m target trajectory points are performed on the m target trajectory points.
- the road map is matched, and the motion trajectory of the mobile terminal is obtained, which can filter or change the trajectory point of the original trajectory point with large error and negative effect, so that the processed target trajectory point is more accurate when performing map matching, especially for
- the high-noise data acquisition method of the base station positioning and the special situation of rapid positioning make the subsequent map matching process more accurate, and the obtained motion trajectory is more in line with the actual situation.
- the size of the sequence numbers of the foregoing processes does not mean the order of execution sequence, and the order of execution of each process should be determined by its function and internal logic, and should not be applied to the embodiment of the present application.
- the implementation process constitutes any limitation.
- the apparatus 200 for determining a motion trajectory includes: an obtaining unit 210, a processing unit 220, and a determining unit 230.
- the acquiring unit 210 is configured to: acquire a position of the n original track points P 1 to P n of the mobile terminal during the motion, where the mobile terminal passes the ith original of the n original track points P 1 to P n
- the time of the track point P i is earlier than the time when the i+1th original track point P i+1 is passed, and n is a positive integer.
- the processing unit 220 is configured to: perform filtering processing on the n original track points P 1 to P n , where the filtering process is used to delete at least one original track point of the n original track points P 1 to P n , and Or updating the position of at least one of the n original track points P 1 to P n .
- the determining unit 230 is configured to: determine, according to the target trajectory point obtained by performing the filtering process on the n original trajectory points P 1 to P n , a motion trajectory of the mobile terminal on at least one road in the road map, the road map Includes multiple roads.
- the apparatus for determining a motion trajectory of the embodiment of the present invention obtains m target trajectory points by performing at least one filtering process on the n original trajectory points in the process of acquiring the mobile terminal, and then performing the m target trajectory points.
- the road map is matched, and the motion trajectory of the mobile terminal is obtained, which can filter or change the trajectory point of the original trajectory point with large error and negative effect, so that the processed target trajectory point is more accurate when performing map matching, especially for
- the high-noise data acquisition method of the base station positioning and the special situation of rapid positioning make the subsequent map matching process more accurate, and the obtained motion trajectory is more in line with the actual situation.
- the processing unit 220 is configured to: acquire a to-be-filtered points P x to P x+a ⁇ 1 in the n original track points P 1 to P n , and the a to-be-filtered points P x to P x+a-1 is located at the first position, x and a are positive integers; b points to be filtered P x+a to P x+a+b-1 are obtained in the n original track points P 1 to P n The b points to be filtered P x+a to P x+a+b-1 are located at the second position, b is a positive integer greater than 1, and c are to be acquired among the n original track points P 1 to P n Filtering points P x+a+b to P x+a+b+c-1 , the c points to be filtered P x+a+b to P x+a+b+c-1 are located at the third position, c is a positive integer, x+a+b+c-1 is less
- the processing unit 220 is specifically configured to: acquire a speed of the first to-be-filtered point P a of the n original track points P 1 to P n , where a is a positive integer less than or equal to n; The speed of the filter point P a is greater than or equal to the preset speed, and the first point to be filtered P a is deleted.
- the processing unit 220 is configured to: obtain, at the n original track points P 1 to P n , 4 points to be filtered P c , P c+1 , P c+2 , and P c+3 , c a positive integer, c+3 is less than or equal to n; determining a first angle ⁇ P c P c+1 P c+2 and a second angle ⁇ P c+1 P c+2 P c+3 ; if the first angle If the second preset angle is less than or equal to and the second angle is less than or equal to the second preset angle, the to-be-filtered points of the four to-be-filtered points P c , P c+1 , P c+2 , and P c+3 are deleted. Point P c+1 or P c+2 to be filtered.
- the processing unit 220 is configured to: acquire, in the n original track points P 1 to P n , 2 ⁇ +1 points to be filtered P f- ⁇ to P f+ ⁇ , where f and ⁇ are positive integers , f is greater than ⁇ ; determining the distance between the point to be filtered P g and the adjacent point to be filtered P g+1 in the 2 ⁇ +1 points to be filtered P f- ⁇ to P f+ ⁇ , g is f- ⁇ To f+ ⁇ -1, obtain 2 ⁇ distances; determine the first point to be filtered P f- ⁇ and the last point to be filtered P f+ of the 2 ⁇ +1 points to be filtered P f- ⁇ to P f+ ⁇ The distance between ⁇ is a first distance; determining a quotient of the sum of the 2 ⁇ distances and the first distance as a distortion degree; when the distortion degree is greater than or equal to the preset distortion degree, deleting the 2 ⁇ +1 points to be filtered P f- ⁇ P
- the processing unit 220 is configured to: acquire, in the n original track points P 1 to P n , 2 ⁇ +1 points to be filtered P l- ⁇ to P l+ ⁇ , where l and ⁇ are positive integers. , l is greater than ⁇ ; in the 2 ⁇ +1 points to be filtered P l- ⁇ to P l+ ⁇ , the average value of the longitude of each of the k points to be filtered is determined, and h points to be filtered The average of the latitudes of each point to be filtered, k and h are positive integers less than 2 ⁇ +1; the average of the longitude and the average of the latitude are respectively determined as the 2 ⁇ +1 points to be filtered P l- ⁇ To the longitude and latitude of the ⁇ +1th to-be-filtered point P l in P l+ ⁇ .
- the processing unit 220 is configured to: acquire the yth to-be-filtered point P y and the y+1th to-be-filtered point P y+1 in the n original trajectory points P 1 to P n ;
- the distance between the y-th filter point P y and the y+1th filter point P y+1 is less than or equal to the preset distance, and the y-th filter point P y and/or the y+1 bit are deleted. P to y+1 to be filtered.
- the apparatus 200 for determining a motion trajectory may correspond to performing the method 100 in the embodiment of the present application, and the foregoing and other operations and/or functions of the respective units in the apparatus 200 are respectively implemented to implement FIG.
- the corresponding processes of the servers in the respective methods in FIG. 9 are not described herein again for the sake of brevity.
- the apparatus for determining a motion trajectory of the embodiment of the present invention obtains m target trajectory points by performing at least one filtering process on the n original trajectory points in the process of acquiring the mobile terminal, and then performing the m target trajectory points.
- the road map is matched, and the motion trajectory of the mobile terminal is obtained, which can filter or change the trajectory point of the original trajectory point with large error and negative effect, so that the processed target trajectory point is more accurate when performing map matching, especially for
- the high-noise data acquisition method of the base station positioning and the special situation of rapid positioning make the subsequent map matching process more accurate, and the obtained motion trajectory is more in line with the actual situation.
- the apparatus 300 includes a processor 310.
- the apparatus 300 further includes a memory 320, and a memory.
- 320 is coupled to processor 310.
- the processor 310 and the memory 320 can communicate with each other through an internal connection path, and the data signal can be transmitted and/or controlled.
- the memory 320 can be used to store instructions, and the processor 310 is configured to execute instructions stored by the memory 320.
- the processor 310 is configured to: acquire a position of the n original track points P 1 to P n of the mobile terminal during the motion, where the mobile terminal passes the i-th original track of the n original track points P 1 to P n
- the time of the point P i is earlier than the time when the i+1th original track point P i+1 is passed, n is a positive integer;
- the n original track points P 1 to P n are filtered, and the filtering process is used for deleting At least one of the n original track points P 1 to P n , and/or a position of updating at least one of the n original track points P 1 to P n ; according to the n originals
- the track points P 1 to P n perform the target track points obtained by the filtering process, and determine the motion track of the mobile terminal on at least one road in the road map, the road map including a plurality of roads.
- the apparatus for determining a motion trajectory of the embodiment of the present invention obtains m target trajectory points by performing at least one filtering process on the n original trajectory points in the process of acquiring the mobile terminal, and then performing the m target trajectory points.
- the road map is matched, and the motion trajectory of the mobile terminal is obtained, which can filter or change the trajectory point of the original trajectory point with large error and negative effect, so that the processed target trajectory point is more accurate when performing map matching, especially for
- the high-noise data acquisition method of the base station positioning and the special situation of rapid positioning make the subsequent map matching process more accurate, and the obtained motion trajectory is more in line with the actual situation.
- the processor 310 is configured to: obtain a to-be-filtered points P x to P x+a ⁇ 1 in the n original track points P 1 to P n , where the a to be filtered Point P x to P x+a-1 are located at the first position, x and a are positive integers; b points to be filtered P x+a to P x+a are obtained in the n original track points P 1 to P n +b-1 , the b points to be filtered P x+a to P x+a+b-1 are located at the second position, b is a positive integer greater than 1; among the n original track points P 1 to P n Obtaining c points to be filtered P x+a+b to P x+a+b+c-1 , the c points to be filtered P x+a+b to P x+a+b+c-1 are located in the third Position, c is a positive integer, x+a+b+
- the processor 310 is configured to: acquire a velocity of the first to-be-filtered point P a of the n original track points P 1 to P n , where a is a positive integer less than or equal to n; The speed of the first to-be-filtered point P a is greater than or equal to the preset speed, and the first to-be-filtered point P a is deleted.
- the processor 310 is configured to: acquire, at the n original track points P 1 to P n , 4 points to be filtered P c , P c+1 , P c+2 , and P c . +3 , c is a positive integer, c+3 is less than or equal to n; determining a first angle ⁇ P c P c+1 P c+2 and a second angle ⁇ P c+1 P c+2 P c+3 ; Deleting the four points to be filtered P c , P c+1 , P c+2 , and P c+3 The point to be filtered P c+1 or the point to be filtered P c+2 .
- the processor 310 is configured to: acquire, in the n original track points P 1 to P n , 2 ⁇ +1 points to be filtered P f- ⁇ to P f+ ⁇ , f and ⁇ is a positive integer, f is greater than ⁇ ; determining the distance between the point to be filtered P g and the adjacent point to be filtered P g+1 in the 2 ⁇ +1 points to be filtered P f- ⁇ to P f+ ⁇ , g Taking f- ⁇ to f+ ⁇ -1, obtaining 2 ⁇ distances; determining the first point to be filtered P f- ⁇ of the 2 ⁇ +1 points to be filtered P f- ⁇ to P f+ ⁇ and the last one to be filtered The distance between the points P f+ ⁇ is the first distance; determining the quotient of the sum of the 2 ⁇ distances and the first distance is a distortion degree; when the distortion degree is greater than or equal to the preset distortion degree, deleting the 2 ⁇ +1 filtered pending points P
- the processor 310 is configured to: acquire, in the n original track points P 1 to P n , 2 ⁇ +1 points to be filtered P l- ⁇ to P l+ ⁇ , l and ⁇ is a positive integer, l is greater than ⁇ ; in the 2 ⁇ +1 points to be filtered P l- ⁇ to P l+ ⁇ , an average value of the longitudes of each of the k points to be filtered is determined, and h
- the average value of the latitude of each point to be filtered in the point to be filtered, k and h are positive integers smaller than 2 ⁇ +1; the average value of the longitude and the average value of the latitude are respectively determined as the 2 ⁇ +1 points to be filtered
- the processor 310 is configured to: acquire the yth to-be-filtered point P y and the y+1th to-be-filtered point P y+ among the n original trajectory points P 1 to P n 1; if the y-th P y and the points to be filtered to the first one to be filtered, y + 1 + P y the distance between the points is less than or equal to the predetermined distance, remove the y-th point P y to be filtered and / or the The y+1th point to be filtered P y+1 .
- the apparatus 300 for determining a motion trajectory may correspond to the apparatus 200 in the embodiment of the present application, and may correspond to executing a corresponding body in the method 100 according to an embodiment of the present application, and in the apparatus 300.
- the foregoing and other operations and/or functions of the respective units are respectively omitted in order to implement the corresponding processes of the servers in the respective methods in FIG. 1 to FIG. 9 for brevity.
- the apparatus for determining a motion trajectory of the embodiment of the present invention obtains m target trajectory points by performing at least one filtering process on the n original trajectory points in the process of acquiring the mobile terminal, and then performing the m target trajectory points.
- the road map is matched, and the motion trajectory of the mobile terminal is obtained, which can filter or change the trajectory point of the original trajectory point with large error and negative effect, so that the processed target trajectory point is more accurate when performing map matching, especially for
- the high-noise data acquisition method of the base station positioning and the special situation of rapid positioning make the subsequent map matching process more accurate, and the obtained motion trajectory is more in line with the actual situation.
- the processor may be an integrated circuit chip with signal processing capabilities.
- each step of the foregoing method embodiments may be completed by an integrated logic circuit of hardware in a processor or an instruction in a form of software.
- the processor may be a general-purpose processor, a digital signal processor (DSP), an application specific integrated circuit (ASIC), a Field Programmable Gate Array (FPGA), or the like. Programming logic devices, discrete gates or transistor logic devices, discrete hardware components.
- the methods, steps, and logical block diagrams disclosed in the embodiments of the present application can be implemented or executed.
- the general purpose processor may be a microprocessor or the processor or any conventional processor or the like.
- the steps of the method disclosed in the embodiments of the present application may be directly implemented by the hardware decoding processor, or may be performed by a combination of hardware and software modules in the decoding processor.
- the software module can be located in a conventional storage medium such as random access memory, flash memory, read only memory, programmable read only memory or electrically erasable programmable memory, registers, and the like.
- the storage medium is located in the memory, and the processor reads the information in the memory and combines the hardware to complete the steps of the above method.
- the memory in the embodiments of the present application may be a volatile memory or a non-volatile memory, or may include both volatile and non-volatile memory.
- the non-volatile memory may be a read-only memory (ROM), a programmable read only memory (PROM), an erasable programmable read only memory (Erasable PROM, EPROM), or an electric Erase programmable read only memory (EEPROM) or flash memory.
- the volatile memory can be a Random Access Memory (RAM) that acts as an external cache.
- RAM Random Access Memory
- many forms of RAM are available, such as static random access memory (SRAM), dynamic random access memory (DRAM), synchronous dynamic random access memory (Synchronous DRAM).
- SDRAM Double Data Rate SDRAM
- DDR SDRAM Double Data Rate SDRAM
- ESDRAM Enhanced Synchronous Dynamic Random Access Memory
- SLDRAM Synchronous Connection Dynamic Random Access Memory
- DR RAM direct memory bus random access memory
- the disclosed systems, devices, and methods may be implemented in other manners.
- the device embodiments described above are merely illustrative.
- the division of the unit is only a logical function division.
- there may be another division manner for example, multiple units or components may be combined or Can be integrated into another system, or some features can be ignored or not executed.
- the mutual coupling or direct coupling or communication connection shown or discussed may be an indirect coupling or communication connection through some interface, device or unit, and may be in an electrical, mechanical or other form.
- the units described as separate components may or may not be physically separated, and the components displayed as units may or may not be physical units, that is, may be located in one place, or may be distributed to multiple network units. Some or all of the units may be selected according to actual needs to achieve the purpose of the solution of the embodiment.
- each functional unit in each embodiment of the present application may be integrated into one processing unit, or each unit may exist physically separately, or two or more units may be integrated into one unit.
- the functions may be stored in a computer readable storage medium if implemented in the form of a software functional unit and sold or used as a standalone product.
- the technical solution of the present application which is essential or contributes to the prior art, or a part of the technical solution, may be embodied in the form of a software product, which is stored in a storage medium, including
- the instructions are used to cause a computer device (which may be a personal computer, server, or network device, etc.) to perform all or part of the steps of the methods described in various embodiments of the present application.
- the foregoing storage medium includes: a U disk, a mobile hard disk, a read-only memory (ROM), a random access memory (RAM), a magnetic disk, or an optical disk, and the like, which can store program codes. .
Landscapes
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Automation & Control Theory (AREA)
- Computer Hardware Design (AREA)
- General Engineering & Computer Science (AREA)
- Signal Processing (AREA)
- Navigation (AREA)
- Image Processing (AREA)
Abstract
一种确定运动轨迹的方法和装置。该方法包括:获取移动终端在运动过程中的n个原始轨迹点P 1至P n的位置,其中,该移动终端经过第i个原始轨迹点P i的时刻早于经过第i+1个原始轨迹点P i+1的时刻,n为正整数(S110);将该n个原始轨迹点P 1至P n进行过滤处理,该过滤处理用于删除和/或更新该n个原始轨迹点P 1至P n中的至少一个原始轨迹点的位置(S120);根据对该n个原始轨迹点P 1至P n进行该过滤处理得到的目标轨迹点,确定该移动终端在道路地图中的至少一条道路上的运动轨迹,该道路地图包括多条道路(S130)。该确定运动轨迹的方法和装置,针对基站定位这样的高噪声的数据获取方式的地图匹配过程更加准确,获得的运动轨迹更加符合实际情况。
Description
本申请要求于2017年07月18日提交中国专利局、申请号为201710586941.1、申请名称为“确定运动轨迹的方法和装置”的中国专利申请的优先权,其全部内容通过引用结合在本申请中。
本申请涉及信息技术领域,并且更具体地,涉及确定运动轨迹的方法和装置。
地图匹配是一种移动轨迹数据的误差修正技术,该技术以模式识别理论为依据,可以基于车辆始终行驶在道路上的假设,其基本思想是结合车辆定位的轨迹与数字地图中的道路网络,将定位方法所测得的车辆位置信息与导航系统的电子地图数据比较和匹配,找到车辆所在的路段。定位技术结合地图匹配技术,可以有效减少由于定位采样带来的误差,极大地提高了车辆定位精度,现已广泛应用于全球定位系统(global positioning system,GPS)导航、交通流分析等领域。
现有的地图匹配技术中,基于隐马尔可夫模型(Hidden Markov Model,HMM)的地图匹配具有最好的准确率和鲁棒性。该方法主要还是针对小误差的轨迹设计的,例如GPS轨迹,其误差在10m的级别,匹配准确率能够达到比较理想的结果。
目前,由于基站定位数据获取比较简单,并且用户手机十分普及,且无需GPS定位那样需要主动开启GPS开关,获得的数据量也较大,蕴含着丰富的信息,因此提出一种基于基站定位数据的地图匹配技术十分必要。若采用现有HMM地图匹配算法,对于基站轨迹数据这种大误差的轨迹,其误差在100m的级别,匹配的准确率则得不到理想的结果。
发明内容
本申请提供了一种确定运动轨迹的方法和装置,能够过滤与修正地图匹配过程中可能起了负面作用的轨迹点。
第一方面,提供了一种确定运动轨迹的方法,该方法包括:获取移动终端在运动过程中的n个原始轨迹点P
1至P
n的位置,其中,该移动终端经过该n个原始轨迹点P
1至P
n中第i个原始轨迹点P
i的时刻早于经过第i+1个原始轨迹点P
i+1的时刻,n为正整数;将该n个原始轨迹点P
1至P
n进行过滤处理,该过滤处理用于删除该n个原始轨迹点P
1至P
n中的至少一个原始轨迹点,和/或更新该n个原始轨迹点P
1至P
n中的至少一个原始轨迹点的位置;根据对该n个原始轨迹点P
1至P
n进行该过滤处理得到的目标轨迹点,确定该移动终端在道路地图中的至少一条道路上的运动轨迹,该道路地图包括多条道路。
因此,本申请实施例的确定运动轨迹的方法,通过对获取移动终端在运动过程中的n个原始轨迹点进行至少一种过滤处理获得m个目标轨迹点,再对该m个目标轨迹点进 行道路地图匹配,进而获得移动终端的运动轨迹,能够过滤或改变原始的轨迹点中误差较大以及起到了负面作用的轨迹点,使得经过处理的目标轨迹点在进行地图匹配时更加准确,尤其针对基站定位这样的高噪声的数据获取方式,以及快速定位这种特殊的情况,使得后续地图匹配过程更加准确,获得的运动轨迹更加符合实际情况。
应理解,服务器可以获取移动终端在运动过程中的n个原始轨迹点P
1至P
n的位置,其中,该n个原始轨迹点P
1至P
n可以为基站采集的该若干轨迹点中的全部轨迹点或者部分轨迹点,例如,服务器可以获取该基站采集的全部轨迹点,该n个原始轨迹点P
1至P
n即为该全部轨迹点;或者,服务器可以对该全部轨迹点进行处理,该n个原始轨迹点P
1至P
n可以为服务器处理原全部轨迹点得到的其中部分轨迹点。
应理解,基站采集移动终端在运动过程中轨迹点,可以采用相同的采样时间,例如,采用相同的时间间隔,获取每个时刻的轨迹点的位置,或者也可以采用不同的采样时间,即在不同的时间间隔,采集移动终端移动的轨迹点的位置。
可选地,作为一个实施例,该方法中的过滤处理可以包括差值过滤、速度过滤、角度过滤、扭曲度过滤、切尾均值过滤和过近点过滤中的至少一个,其中,速度过滤、角度过滤、扭曲度过滤和过近点过滤可以用于删除该n个原始轨迹点P
1至P
n中的至少一个原始轨迹点,差值过滤和切尾均值过滤可以用于更新该n个原始轨迹点P
1至P
n中的至少一个原始轨迹点的位置。
结合第一方面,在第一方面的一种实现方式中,该将该n个原始轨迹点P
1至P
n进行过滤处理,包括:将该n个原始轨迹点P
1至P
n进行差值过滤处理,该差值过滤处理用于将位置重合的点进行重新排列,即更新重合点的位置。
结合第一方面及其上述实现方式,在第一方面的另一种实现方式中,该将该n个原始轨迹点P
1至P
n进行过滤处理,包括:在该n个原始轨迹点P
1至P
n中获取a个待过滤点P
x至P
x+a-1,该a个待过滤点P
x至P
x+a-1位于第一位置,x和a为正整数;在该n个原始轨迹点P
1至P
n中获取b个待过滤点P
x+a至P
x+a+b-1,该b个待过滤点P
x+a至P
x+a+b-1位于第二位置,b为大于1的正整数;在该n个原始轨迹点P
1至P
n中获取c个待过滤点P
x+a+b至P
x+a+b+c-1,该c个待过滤点P
x+a+b至P
x+a+b+c-1位于第三位置,c为正整数,x+a+b+c-1小于或者等于n;在该第一位置到该第二位置的直线上均匀排列待过滤点
 至
至
 在该第二位置到该第三位置的直线上均匀排列待过滤点
在该第二位置到该第三位置的直线上均匀排列待过滤点
 至
至

 表示向下取整。
表示向下取整。
应理解,对于a大于1时,该a个待过滤点P
x至P
x+a-1在该第一位置上完全重合;该b个待过滤点P
x+a至P
x+a+b-1在第二位置上完全重合;对于c大于1时,该c个待过滤点P
x+a+b至P
x+a+b+c-1在第三位置上完全重合。
应理解,在该第一位置到该第二位置的直线上均匀排列待过滤点
 至
至
 包括:在第一位置上为待过滤点
包括:在第一位置上为待过滤点
 在第二位置上为待过滤点
在第二位置上为待过滤点
 将第一位置与第二位置之间的直线按照距离等分,依次排列待过滤点
将第一位置与第二位置之间的直线按照距离等分,依次排列待过滤点
 至
至
 之间的每个待过滤点。
之间的每个待过滤点。
应理解,在该第二位置到该第三位置的直线上均匀排列待过滤点
 至
至
 包括:在第二位置上为待过滤点
包括:在第二位置上为待过滤点
 在第三位置上为待过滤点
在第三位置上为待过滤点
 将第二位置与第三位置之间的直线按照距离等分,依次排列待过滤点
将第二位置与第三位置之间的直线按照距离等分,依次排列待过滤点
 至
至
 之间的每个待过滤点。
之间的每个待过滤点。
因此,通过差值过滤,可以将重合的轨迹点重新排列,更新部分轨迹点的位置,使得轨迹点分布更加均匀。
结合第一方面及其上述实现方式,在第一方面的另一种实现方式中,该将该n个原始轨迹点P
1至P
n进行过滤处理,包括:将该n个原始轨迹点P
1至P
n进行速度过滤处理,该速度过滤处理用于过滤速度较大的点,例如,可以过滤掉速度大于或者等于预设速度的点。
结合第一方面及其上述实现方式,在第一方面的另一种实现方式中,该将该n个原始轨迹点P
1至P
n进行过滤处理,包括:获取n个原始轨迹点P
1至P
n中的第一待过滤点P
a的速度,a为小于或者等于n的正整数;若该第一待过滤点P
a的速度大于或者等于预设速度,删除该第一待过滤点P
a。
结合第一方面及其上述实现方式,在第一方面的另一种实现方式中,该获取n个原始轨迹点P
1至P
n中的第一待过滤点P
a的速度,包括:在该n个原始轨迹点P
1至P
n中获取该第一待过滤点P
a和第二待过滤点P
b,b=a+1或者b=a-1,a小于n;确定从该第一待过滤点P
a到该第二待过滤点P
b的平均速度为该第一待过滤点P
a的速度。
应理解,预设速度可以根据实际情况进行设置,例如,可以根据移动终端在整个运动过程中的平均速度设置,或者是根据移动终端在某一段时间或距离内的速度进行设置,本申请实施例并不限于此。
因此,通过速度过滤,可以将部分误差速度过大的轨迹点过滤掉,这些轨迹的速度不符合常理,与其它轨迹点的速度相差过大,速度过滤可以使得剩余数据更加合理和准备。
结合第一方面及其上述实现方式,在第一方面的另一种实现方式中,该将该n个原始轨迹点P
1至P
n进行过滤处理,包括:将该n个原始轨迹点P
1至P
n进行角度过滤处理,该角度过滤用于删除部分角度大于或者等于预设角度的角的顶点。
结合第一方面及其上述实现方式,在第一方面的另一种实现方式中,该将该n个原始轨迹点P
1至P
n进行过滤处理,包括:在该n个原始轨迹点P
1至P
n中获取4个待过滤点P
c、P
c+1、P
c+2和P
c+3,c为正整数,c+3小于或者等于n;确定第一角度∠P
cP
c+1P
c+2和第二角度∠P
c+1P
c+2P
c+3;若该第一角度小于或者等于第一预设角度且该第二角度小于或者等于第二预设角度,删除该4个待过滤点P
c、P
c+1、P
c+2和P
c+3中的待过滤点P
c+1或者待过滤点P
c+2。
应理解,预设角度可以根据实际情况进行设置,其中,第一预设角度和第二预设角度可以设置为相同或者不同,本申请实施例并不限于此。
考虑到移动终端在道路上运动时,其轨迹一般应该为较平滑的线段,如果出现了较小的锐角的情况,则很有可能是采样误差造成的,因此,可以通过角度过滤把误差较大的轨迹点过滤掉。
结合第一方面及其上述实现方式,在第一方面的另一种实现方式中,该将该n个原始轨迹点P
1至P
n进行过滤处理,包括:将该n个原始轨迹点P
1至P
n进行扭曲度过滤处理,该扭曲度过滤处理可以删除部分扭曲度过大的点。
结合第一方面及其上述实现方式,在第一方面的另一种实现方式中,该将该n个原始轨迹点P
1至P
n进行过滤处理,包括:在该n个原始轨迹点P
1至P
n中,获取2α+1个待 过滤点P
f-α至P
f+α,f和α为正整数,f大于α;确定该2α+1个待过滤点P
f-α至P
f+α中待过滤点P
g与相邻的待过滤点P
g+1之间的距离,g取f-α至f+α-1,获得2α个距离;确定该2α+1个待过滤点P
f-α至P
f+α中第一个待过滤点P
f-α与最后一个待过滤点P
f+α之间的距离为第一距离;确定该2α个距离之和与该第一距离的商为扭曲度;当该扭曲度大于或等于预设扭曲度时,删除该2α+1个待过滤点P
f-α至P
f+α中第α+1个待过滤点P
f。
具体地,服务器可以在该n个原始轨迹点P
1至P
n中遍历每一个点,这里以任意一个轨迹点P
f为例。以该待过滤点P
f为中心,设置半窗大小为α,即以待过滤点P
f为中心,在n个原始轨迹点P
1至P
n中取P
f前后各α个待过滤点,共获取2α+1个待过滤点P
f-α至P
f+α。确定该2α+1个待过滤点P
f-α至P
f+α中两两待过滤点之间的距离,并将所有距离求和。再确定该2α+1个待过滤点P
f-α至P
f+α中第一个待过滤点P
f-α与最后一个待过滤点P
f+α之间的距离,将该距离称为第一距离,则该待过滤点P
f的扭曲度等于上述2α个距离之和与该第一距离的商。
应理解,根据预设扭曲度ζ,若tort(P
f)≥ζ,则认为P
f的扭曲度过大,即该P
f附近的若干个点组成的折线段比较扭曲,置信度较低,需要将P
f过滤;否则可以保留P
f。
可选地,预设扭曲度ζ可以根据实际情况进行设置,一般可以将扭曲度ζ设置为满足ζ≥1。
由于移动终端在路网上做运动时,其轨迹应该为较平滑的线段,也就是对应的扭曲度较小,即趋近于1,如果出现了扭曲严重的情况,则很有可能是采样误差造成的,因此需要执行过滤,通过该扭曲度过滤能过滤掉一部分大误差点。
结合第一方面及其上述实现方式,在第一方面的另一种实现方式中,该将该n个原始轨迹点P
1至P
n进行过滤处理,包括:将该n个原始轨迹点P
1至P
n进行切尾均值过滤处理,该切尾均值过滤处理可以更新部分或全部轨迹点的坐标。
结合第一方面及其上述实现方式,在第一方面的另一种实现方式中,该将该n个原始轨迹点P
1至P
n进行过滤处理,包括:在该n个原始轨迹点P
1至P
n中,获取2β+1个待过滤点P
l-β至P
l+β,l和β为正整数,l大于β;在该2β+1个待过滤点P
l-β至P
l+β中,确定k个待过滤点中每个待过滤点的经度的平均值,以及h个待过滤点中每个待过滤点的纬度的平均值,k和h为小于2β+1的正整数;将该经度的平均值和该纬度的平均值分别确定为该2β+1个待过滤点P
l-β至P
l+β中第β+1个待过滤点P
l的经度和纬度。
结合第一方面及其上述实现方式,在第一方面的另一种实现方式中,该将该n个原始轨迹点P
1至P
n进行过滤处理,包括:建立直角坐标系,该直角坐标系包括水平方向的X轴和垂直方向的Y轴;确定该n个原始轨迹点P
1至P
n中每个原始轨迹点的坐标;在该n个原始轨迹点P
1至P
n中,获取2β+1个待过滤点P
l-β至P
l+β,l和β为正整数,l大于β;在该2β+1个待过滤点P
l-β至P
l+β中,确定k个待过滤点中每个待过滤点的X轴坐标的平均值,以及h个待过滤点中每个待过滤点的Y轴坐标的平均值,k和h为小于2β+1的正整数;将该X轴坐标的平均值和该Y轴坐标的平均值分别确定为该2β+1个待过滤点P
l-β至P
l+β中第β+1个待过滤点P
l的X轴坐标和Y轴坐标。
应理解,在该2β+1个待过滤点P
l-β至P
l+β中,确定k个待过滤点以及h个待过滤点,该k个待过滤点以及h个待过滤点可以为连续的,也可以为不连续的,k与h的取值可以相等,也可以不相等,该该k个待过滤点以及h个待过滤点可以为相同的点,也可以不相 同的点。
可选地,对于在该2β+1个待过滤点P
l-β至P
l+β中确定k个待过滤点,可以将该2β+1个待过滤点中每个待过滤点按照第一坐标值的大小进行排列,该第一坐标可以指上述经度值或者X轴坐标,去掉部分最大和最小值,仅取中间大小的k个待过滤点;类似的,再将每个待过滤点按照第二坐标值的大小进行排列,该第二坐标可以指上述纬度值或者Y轴坐标,去掉部分最大和最小值,仅取中间大小的h个待过滤点。
应理解,可以对该n个原始轨迹点P
1至P
n中每个轨迹点都进行该切尾均值过滤处理,或者,也可以对部分轨迹点进行切尾均值过滤处理,例如,仅对部分坐标值变化较大的点进行切尾均值过滤处理。可选地,可以设置差值阈值,在坐标值变化量小于该差值阈值时,确定坐标值变化较小,而不进行切尾均值过滤,但本申请实施例并不限于此。
因此,切尾均值过滤可以通过联系前后若干个点的位置来将当前点的坐标进行一定的调整,使得轨迹的形状更加趋于平滑,对后续地图匹配起到了帮助的作用。
结合第一方面及其上述实现方式,在第一方面的另一种实现方式中,该将该n个原始轨迹点P
1至P
n进行过滤处理,包括:将该n个原始轨迹点P
1至P
n进行过近点过滤处理,该过近点过滤处理用于删除距离较近的轨迹点。
结合第一方面及其上述实现方式,在第一方面的另一种实现方式中,该将该n个原始轨迹点P
1至P
n进行过滤处理,包括:在该n个原始轨迹点P
1至P
n中获取第y个待过滤点P
y和第y+1个待过滤点P
y+1;若该第y个待过滤点P
y和该第y+1个待过滤点P
y+1之间的距离小于或者等于预设距离,删除第y个待过滤点P
y和/或该第y+1个待过滤点P
y+1。
结合第一方面及其上述实现方式,在第一方面的另一种实现方式中,该将该n个原始轨迹点P
1至P
n进行过滤处理,包括:在该n个原始轨迹点P
1至P
n中获取第y-1个待过滤点P
y-1、第y个待过滤点P
y和第y+1个待过滤点P
y+1;若该第y-1个待过滤点P
y-1和该第y个待过滤点P
y之间的距离小于或者等于预设距离,且该第y个待过滤点P
y和该第y+1个待过滤点P
y+1之间的距离也小于或者等于预设距离,则删除第y个待过滤点P
y;否则保留该待过滤点P
y。
因此,过近点过滤处理可以将由于移动终端的移动速度过慢或静止而造成的定位误差以及对地图匹配的影响给排除掉,解决了移动终端停留导致定位点漂移的问题。例如,该移动终端可以为车辆,车辆行驶过程中可能发生停车或减速,过近点过滤处理可以排除车辆停车或减速过程造成的定位误差。
应理解,由于上述过滤处理可以包括上述差值过滤、速度过滤、角度过滤、扭曲度过滤、切尾均值过滤和过近点过滤中的至少一个,因此,在该过滤处理包括至少两个过滤处理过程时,对于任意一次的非首次过滤处理中的n个原始轨迹点P
1至P
n,可以为上一次过滤处理后剩余的轨迹点进行重新编号获得。
应理解,考虑到计算复杂度和精确度,可以任意选择差值过滤、速度过滤、角度过滤、扭曲度过滤、切尾均值过滤和过近点过滤中至少一种过滤方式。例如,对于角度过滤和扭曲度过滤,由于过程类似,可以仅选择其中一种执行。再例如,由于差值过滤较复杂且原始轨迹点完全重叠可能性较小,可以选择不执行差值过滤。再例如,考虑到计算效果,如果确定执行差值过滤,可以将该差值过滤设置为第一次过滤,之后再进行其他过滤过程。
结合第一方面及其上述实现方式,在第一方面的另一种实现方式中,获取该道路地 图,该道路地图中的该多条道路中的每条道路仅包括两个端点,不包括任何岔路。
结合第一方面及其上述实现方式,在第一方面的另一种实现方式中,将该n个原始轨迹点P
1至P
n进行过滤处理,包括:将该n个原始轨迹点P
1至P
n进行过滤处理获得m个目标轨迹点,m为小于或者等于n的正整数。
结合第一方面及其上述实现方式,在第一方面的另一种实现方式中,根据对该n个原始轨迹点P
1至P
n进行该过滤处理得到的目标轨迹点,确定该移动终端在道路地图中的至少一条道路上的运动轨迹,包括:将该m个目标轨迹点与该道路地图中的位于道路上的m个点相匹配,该m个点按照时间顺序排列;根据该m个点占用的道路,确定该移动终端在该至少一条道路上的运动轨迹。
结合第一方面及其上述实现方式,在第一方面的另一种实现方式中,根据对该n个原始轨迹点P
1至P
n进行该过滤处理得到的目标轨迹点,确定该移动终端在道路地图中的至少一条道路上的运动轨迹,包括:获取该m个点中在时间上连续的第一点和第二点,该第一点的时间早于该第二点的时间;若该第一点和该第二点位于同一条道路,确定该移动终端的轨迹沿该同一条道路由该第一点运动至该第二点;若该第一点位于第一道路,该第二点位于第二道路,该第一道路与该第二道路不同且相连,确定该移动终端的轨迹沿该第一道路上的该第一点运动至该第二道路上的该第二点;若该第一点位于第一道路,该第二点位于第二道路,该第一道路与该第二道路不同且不相连,确定该第一道路的终点到该第二道路的起点之间沿着该道路地图中的道路的最短路径,并确定该移动终端的轨迹沿该第一道路上的该第一点运动至该第一道路的终点,经过该最短路径达到该第二道路的起点,经过该第二道路的起点运动至该第二道路上的该第二点。
因此,本申请实施例的确定运动轨迹的方法,通过对获取移动终端在运动过程中的n个原始轨迹点进行至少一种过滤处理获得m个目标轨迹点,再对该m个目标轨迹点进行道路地图匹配,进而获得移动终端的运动轨迹,能够过滤或改变原始的轨迹点中误差较大以及起到了负面作用的轨迹点,使得经过处理的目标轨迹点在进行地图匹配时更加准确,尤其针对基站定位这样的高噪声的数据获取方式,以及快速定位这种特殊的情况,使得后续地图匹配过程更加准确,获得的运动轨迹更加符合实际情况。
第二方面,提供了一种确定运动轨迹的装置,用于执行上述第一方面或第一方面的任意可能的实现方式中的方法。具体地,该装置包括用于执行上述第一方面或第一方面的任意可能的实现方式中的方法的单元。
第三方面,提供了一种确定运动轨迹的装置,包括:存储单元和处理器,该存储单元用于存储指令,该处理器用于执行该存储器存储的指令,并且当该处理器执行该存储器存储的指令时,该执行使得该处理器执行第一方面或第一方面的任意可能的实现方式中的方法。
第四方面,提供了一种计算机可读介质,用于存储计算机程序,该计算机程序包括用于执行第一方面或第一方面的任意可能的实现方式中的方法的指令。
第五方面,提供了一种包括指令的计算机程序产品,当计算机运行该计算机程序产品的该指令时,该计算机执行上述第一方面或第一方面的任意可能的实现方式中的确定运动轨迹的方法。具体地,该计算机程序产品可以运行于上述第三方面的确定运动轨迹的装置上。
图1是根据本申请实施例的确定运动轨迹的方法的示意性流程图。
图2是根据本申请实施例的差值过滤的示意图。
图3是根据本申请实施例的速度过滤的示意图。
图4是根据本申请实施例的角度过滤的示意图。
图5是根据本申请实施例的扭曲度过滤的示意图。
图6是根据本申请实施例的切尾均值过滤的示意图。
图7是根据本申请实施例的过近点过滤的示意图。
图8是根据本申请实施例的道路地图匹配方法的示意图。
图9是根据本申请实施例的道路地图匹配方法的另一示意图。
图10是根据本申请实施例的确定运动轨迹的装置的示意性框图。
图11是根据本申请实施例的确定运动轨迹的装置的另一示意性框图。
下面将结合附图,对本申请中的技术方案进行描述。
应理解,本申请实施例的技术方案可以应用于各种通信系统,例如:全球移动通讯(Global System of Mobile communication,GSM)系统、码分多址(Code Division Multiple Access,CDMA)系统、宽带码分多址(Wideband Code Division Multiple Access,WCDMA)系统、通用分组无线业务(General Packet Radio Service,GPRS)、长期演进(Long Term Evolution,LTE)系统、LTE频分双工(Frequency Division Duplex,FDD)系统、LTE时分双工(Time Division Duplex,TDD)、通用移动通信系统(Universal Mobile Telecommunication System,UMTS)、或全球互联微波接入(Worldwide Interoperability for Microwave Access,WiMAX)通信系统等。
在本申请实施例中,移动终端可以包括但不限于移动台(Mobile Station,MS)、移动终端(Mobile Terminal)、移动电话(Mobile Telephone)、用户设备(User Equipment,UE)、手机(handset)及便携设备(portable equipment)、车辆(vehicle)等,该移动终端可以经无线接入网(Radio Access Network,RAN)与一个或多个核心网进行通信,例如,移动终端可以是车辆,还可以是便携式、袖珍式、手持式、计算机内置的或者车载的移动装置等。
本申请实施例所还涉及到基站,该基站可以采集到移动终端在移动过程中的运动轨迹,可选地,该基站可以复用现有的基站,即可以为一种部署在无线接入网中用以为终端设备提供无线通信功能的装置。该基站可以包括各种形式的宏基站,微基站,中继站,接入点等。在采用不同的无线接入技术的系统中,具有基站功能的设备的名称可能会有所不同。例如在LTE网络中,称为演进的节点B(Evolved NodeB,eNB或eNodeB),在第三代(3rd Generation,3G)网络中,称为节点B(Node B)等等
图1示出了根据本申请实施例的确定运动轨迹的方法100的示意性流程图,该方法100可以由服务器执行,例如定位服务器,该定位服务器可以获取基站采集到的移动终端的移动轨迹的数据,并将该数据进行相关处理,可选的,该定位服务器还可以为该基站, 本申请实施例并不限于此。为了便于描述,下面以该方法100由服务器执行为例进行说明。
如图1所示,该方法100包括:S110,获取移动终端在运动过程中的n个原始轨迹点P
1至P
n的位置,其中,该移动终端经过该n个原始轨迹点P
1至P
n中第i个原始轨迹点P
i的时刻早于经过第i+1个原始轨迹点P
i+1的时刻,n为正整数。
在本申请实施例中,移动终端在移动过程中,可以由基站采集移动终端的运动轨迹,获取若干轨迹点的位置,在S110中,服务器可以获取移动终端在运动过程中的n个原始轨迹点P
1至P
n的位置,其中,该n个原始轨迹点P
1至P
n可以为基站采集的该若干轨迹点中的全部轨迹点或者部分轨迹点,例如,服务器可以获取该基站采集的全部轨迹点,该n个原始轨迹点P
1至P
n即为该全部轨迹点;或者,服务器可以对该全部轨迹点进行处理,该n个原始轨迹点P
1至P
n可以为服务器处理原全部轨迹点得到的其中部分轨迹点,本申请实施例并不限于此。
应理解,移动终端的运动过程,随着时间的迁移,移动终端可能位于不同的位置,基站采集移动终端运动过程中的轨迹点,对应每个轨迹点包括移动终端经过该轨迹点的时刻,服务器获取移动终端的n个原始轨迹点P
1至P
n可以按照移动终端经过该原始轨迹点的时刻进行排列,例如,该n个原始轨迹点P
1至P
n中第i个原始轨迹点P
i的时刻早于经过第i+1个原始轨迹点P
i+1的时刻。
应理解,基站采集移动终端在运动过程中轨迹点,可以采用相同的采样时间,例如,采用相同的时间间隔,获取每个时刻的轨迹点的位置,或者也可以采用不同的采样时间,即在不同的时间间隔,采集移动终端移动的轨迹点的位置。
如图1所示,该方法100还包括:S120,将该n个原始轨迹点P
1至P
n进行过滤处理,该过滤处理可以用于删除该n个原始轨迹点P
1至P
n中的至少一个原始轨迹点,和/或更新该n个原始轨迹点P
1至P
n中的至少一个原始轨迹点的位置。
可选地,作为一个实施例,该过滤处理可以包括差值过滤、速度过滤、角度过滤、扭曲度过滤、切尾均值过滤和过近点过滤中的至少一个,其中,速度过滤、角度过滤、扭曲度过滤和过近点过滤可以用于删除该n个原始轨迹点P
1至P
n中的至少一个原始轨迹点,差值过滤和切尾均值过滤可以用于更新该n个原始轨迹点P
1至P
n中的至少一个原始轨迹点的位置。
可选地,作为一个实施例,将该n个原始轨迹点P
1至P
n进行过滤处理,该过滤处理可以为差值过滤。具体地,服务器在该n个原始轨迹点P
1至P
n中获取a个待过滤点P
x至P
x+a-1,该a个待过滤点P
x至P
x+a-1位于第一位置,x和a为正整数,即对于a大于1时,该a个待过滤点P
x至P
x+a-1在该第一位置上完全重合。再在该n个原始轨迹点P
1至P
n中获取b个待过滤点P
x+a至P
x+a+b-1,该b个待过滤点P
x+a至P
x+a+b-1位于第二位置,b为大于1的正整数,即该b个待过滤点P
x+a至P
x+a+b-1在第二位置上完全重合。再在该n个原始轨迹点P
1至P
n中获取c个待过滤点P
x+a+b至P
x+a+b+c-1,该c个待过滤点P
x+a+b至P
x+a+b+c-1位于第三位置,c为正整数,x+a+b+c-1小于或者等于n,即对于c大于1时,该c个待过滤点P
x+a+b至P
x+a+b+c-1在第三位置上完全重合。连接第一位置到第二位置的直线,在该第一位置到该第二位置的直线上均匀排列待过滤点
 至
至
 其中,在第一位置上为待过滤点
其中,在第一位置上为待过滤点
 在第二位置上为待过滤点
在第二位置上为待过滤点
 将第一位置与第二位置之间的直线按照距离等分,依次排列待过滤点
将第一位置与第二位置之间的直线按照距离等分,依次排列待过滤点
 至
至
 之间的每个待过滤点。同样的,连 接第二位置到第三位置的直线,在该第二位置到该第三位置的直线上均匀排列待过滤点
之间的每个待过滤点。同样的,连 接第二位置到第三位置的直线,在该第二位置到该第三位置的直线上均匀排列待过滤点
 至
至
 其中,在第二位置上为待过滤点
其中,在第二位置上为待过滤点
 在第三位置上为待过滤点
在第三位置上为待过滤点
 将第二位置与第三位置之间的直线按照距离等分,依次排列待过滤点
将第二位置与第三位置之间的直线按照距离等分,依次排列待过滤点
 至
至
 之间的每个待过滤点,
之间的每个待过滤点,
 表示向下取整。
表示向下取整。
例如,图2示出了根据本申请实施例的差值过滤的示意图。如图2所示,取n个原始轨迹点中位于第一位置的a个待过滤点P
x至P
x+a-1,令a=3,x=11,第一位置为A点,即该a个待过滤点为位于A点的P
11、P
12和P
13;取n个原始轨迹点中位于第二位置的b个待过滤点P
x+a至P
x+a+b-1,令b=5,第二位置为B点,即该b个待过滤点为位于B点的P
14、P
15、P
16、P
17和P
18;取n个原始轨迹点中位于第三位置的c个待过滤点P
x+a+b至P
x+a+b+c-1,令c=2,第三位置为C点,即该c个待过滤点为位于C点的P
19和P
20。连接A点与B点得到线段AB,根据a=3,b=5可知,在线段AB之间均匀排列P
12至P
16共5个待过滤点,则把线段AB分为距离相等的4段,得到如图2所示的A点、D点、E点、F点和B点5个点,满足AD=DE=EF=FB,排列结果为:在A点处为P
12,在D点处为P'
13,E点处为P'
14,F点处为P'
15,B点处为P
16,其中,P'
13为P
13移动后的位置,P'
14为P
14移动后的位置,P'
15为P
15移动后的位置。同样的,连接B点和C点得到线段AB,根据b=5,c=2可知,在线段BC之间均匀排列P16至P20共5个待过滤点,则把线段BC分为距离相等的4段,得到如图2所示的B点、G点、H点、K点和C点5个点,满足BG=GH=HK=KC,排列结果为:在B点处为P
16,在G点处为P'
17,H点处为P'
18,K点处为P'
19,C点处为P
20,其中,P'
17为P
17移动后的位置,P'
18为P
18移动后的位置,P'
19为P
19移动后的位置。
因此,通过差值过滤,可以将重合的点重新排列,更新部分轨迹点的位置,使得轨迹点分布更加均匀。
可选地,作为一个实施例,将该n个原始轨迹点P
1至P
n进行过滤处理,该过滤处理可以为速度过滤。具体地,服务器获取n个原始轨迹点P
1至P
n中的第一待过滤点P
a的速度,该第一待过滤点P
a可以依次取n个原始轨迹点P
1至P
n中的每一个轨迹点;若该第一待过滤点P
a的速度大于或者等于预设速度,删除该第一待过滤点P
a。其中,确定第一待过滤点P
a的速度包括:服务器可以在该n个原始轨迹点P
1至P
n中获取该第一待过滤点P
a和第二待过滤点P
b,b=a+1或者b=a-1;确定从该第一待过滤点P
a到该第二待过滤点P
b的平均速度为该第一待过滤点P
a的速度,但本申请实施例并不限于此。
例如,图3示出了根据本申请实施例的速度过滤的示意图。如图3所示,第一待过滤点P
a可以依次取n个原始轨迹点P
1至P
n中的每一个轨迹点,这里以第一待过滤点为P
9为例进行说明。确定P
9的速度,可以通过确定从P
8到P
9的平均速度为P
9的速度,或者,确定从P
9到P
10的平均速度为P
9的速度。若该P
9的速度大于或者等于预设速度,则如图3所示,可以将P
9删除;若该P9的速度小于预设速度,则保留P
9。
应理解,预设速度可以根据实际情况进行设置,例如,可以根据移动终端在整个运动过程中的平均速度设置,或者是根据移动终端在某一段时间或距离内的速度进行设置,本申请实施例并不限于此。
因此,通过速度过滤,可以将部分误差速度过大的轨迹点过滤掉,这些轨迹的速度不符合常理,与其它轨迹点的速度相差过大,速度过滤可以使得剩余数据更加合理和准备。
可选地,作为一个实施例,将该n个原始轨迹点P
1至P
n进行过滤处理,该过滤处理 可以为角度过滤。具体地,该角度过滤可以用于过滤到大于或者等于预设角度的角的顶点,例如,服务器可以在该n个原始轨迹点P
1至P
n中获取4个待过滤点P
c、P
c+1、P
c+2和P
c+3,其中,c为正整数,c+3小于等于n;确定第一角度∠P
cP
c+1P
c+2和第二角度∠P
c+1P
c+2P
c+3;若该第一角度小于或者等于第一预设角度且该第二角度小于或者等于第二预设角度,删除该4个待过滤点P
c、P
c+1、P
c+2和P
c+3中的待过滤点P
c+1或者待过滤点P
c+2,其中,该预设角度包括该第一预设角度和该第二预设角度。
例如,图4示出了根据本申请实施例的角度过滤的示意图。如图4所示,取n个原始轨迹点P
1至P
n中获取4个待过滤点,以P
13、P
14、P
15和P
16为例。根据图4可知,测量∠P
13P
14P
15和∠P
14P
15P
16的大小分别为∠P
13P
14P
15=60°和∠P
14P
15P
16=55°,假设第一预设角度和第二预设角度均设置为80°,则∠P
13P
14P
15和∠P
14P
15P
16都小于预设角度,因此可以将P
14或P
15删除,例如图4可以将P
15删除。
应理解,预设角度可以根据实际情况进行设置,其中,第一预设角度和第二预设角度可以设置为相同或者不同,本申请实施例并不限于此。
考虑到移动终端在道路上运动时,其轨迹一般应该为较平滑的线段,如果出现了较小的锐角的情况,则很有可能是采样误差造成的,因此,可以通过角度过滤把误差较大的轨迹点过滤掉。
可选地,作为一个实施例,将该n个原始轨迹点P
1至P
n进行过滤处理,该过滤处理可以为扭曲度过滤。具体地,服务器在该n个原始轨迹点P
1至P
n中,获取2α+1个待过滤点P
f-α至P
f+α,f和α为正整数,f大于α。确定该2α+1个待过滤点P
f-α至P
f+α中任意一个待过滤点P
g与相邻的待过滤点P
g+1之间的距离,g分别取f-α至f+α-1中的每一个,一共可以获得2α个距离;确定该2α+1个待过滤点P
f-α至P
f+α中第一个待过滤点P
f-α与最后一个待过滤点P
f+α之间的距离为第一距离;确定该2α个距离之和与该第一距离的商为扭曲度;当该扭曲度大于或等于预设扭曲度时,删除该2α+1个待过滤点P
f-α至P
f+α中第α+1个待过滤点P
f。
具体地,服务器可以在该n个原始轨迹点P
1至P
n中遍历每一个点,这里以任意一个轨迹点P
f为例。以该待过滤点P
f为中心,设置半窗大小为α,即以待过滤点P
f为中心,在n个原始轨迹点P
1至P
n中取P
f前后各α个待过滤点,共获取2α+1个待过滤点P
f-α至P
f+α。确定该2α+1个待过滤点P
f-α至P
f+α中两两待过滤点之间的距离,并将所有距离求和。再确定该2α+1个待过滤点P
f-α至P
f+α中第一个待过滤点P
f-α与最后一个待过滤点P
f+α之间的距离,将该距离称为第一距离,则该待过滤点P
f的扭曲度等于上述2α个距离之和与该第一距离的商,即可以通过下面的公式计算该待过滤点P
f的扭曲度tort(P
f):

其中,dist(A,B)表示计算AB两点之间的距离。
应理解,根据预设扭曲度ζ,若tort(P
f)≥ζ,则认为P
f的扭曲度过大,即该P
f附近的若干个点组成的折线段比较扭曲,置信度较低,需要将P
f过滤;否则可以保留P
f。
可选地,预设扭曲度ζ可以根据实际情况进行设置,一般可以将扭曲度ζ设置为满足ζ≥1,但本申请实施例并不限于此。
例如,图5示出了根据本申请实施例的扭曲度过滤的示意图。如图5所示,服务器在该n个原始轨迹点P
1至P
n中遍历每个轨迹点,这里以待过滤点P
24为例进行说明。计算P
24的扭曲度,这里将半窗大小设置为α=2,即共取5个待过滤点,分别为点P
22至点P
26。根据图5可知,待过滤点P
22至P
26中每相邻的两个点的距离分别为:P
22P
23=2,P
23P
24=4.5,P
24P
25=4,P
25P
26=3;该5个待过滤点中第一个待过滤点P
22和最后一个待过滤点P
26之间的距离为:P
22P
26=10。因此,根据上述的公式可知,待过滤点P
24的扭曲度为:
假设将预设扭曲度ζ设置为1.2,则1.35>1.2,因此,如图5所示,需要将待过滤点P
24删除。
由于移动终端在路网上做运动时,其轨迹应该为较平滑的线段,也就是对应的扭曲度较小,即趋近于1,如果出现了扭曲严重的情况,则很有可能是采样误差造成的,因此需要执行过滤,通过该扭曲度过滤能过滤掉一部分大误差点。
可选地,作为一个实施例,将该n个原始轨迹点P
1至P
n进行过滤处理,该过滤处理可以为切尾均值过滤。具体地,服务器在该n个原始轨迹点P
1至P
n中,获取2β+1个待过滤点P
l-β至P
l+β,l和β为正整数,l大于β;在该2β+1个待过滤点P
l-β至P
l+β中,每个待过滤点的位置可以通过至少两个坐标值来表示,这里以每个待过滤点的位置通过两个坐标值来表示为例进行说明,该两个坐标分别为第一坐标和第二坐标。确定k个待过滤点中每个待过滤点的第一坐标的平均值,以及h个待过滤点中每个待过滤点的第二坐标的平均值,k和h为小于2β+1的正整数;类似的,对于多于两个坐标值,还可以继续求其它坐标值的平均值。将该第一坐标的平均值和该第二坐标的平均值分别确定为该2β+1个待过滤点P
l-β至P
l+β中第l个待过滤点P
l的第一坐标值和第二坐标值。
应理解,在该2β+1个待过滤点P
l-β至P
l+β中,确定k个待过滤点以及h个待过滤点,该k个待过滤点以及h个待过滤点可以为连续的,也可以为不连续的,k与h的取值可以相等,也可以不相等,该该k个待过滤点以及h个待过滤点可以为相同的点,也可以不相同的点。
可选地,对于在该2β+1个待过滤点P
l-β至P
l+β中确定k个待过滤点,可以将该2β+1个待过滤点中每个待过滤点按照第一坐标值的大小进行排列,去掉部分最大和最小值,仅取中间大小的k个待过滤点;类似的,再将每个待过滤点按照第二坐标值的大小进行排列,去掉部分最大和最小值,仅取中间大小的h个待过滤点。
可选地,该2β+1个待过滤点P
l-β至P
l+β中每个待过滤点的至少两个坐标值可以为经度坐标和纬度坐标。具体地,在该2β+1个待过滤点P
l-β至P
l+β中,确定k个待过滤点P
m至P
m+k-1中每个待过滤点的经度的平均值,以及h个待过滤点P
m至P
m+h-1中每个待过滤点的纬度的平均值,将该经度的平均值和该纬度的平均值分别确定为该2β+1个待过滤点P
l-β至P
l+β中第l个待过滤点P
l的经度和纬度。
可选地,该2β+1个待过滤点P
l-β至P
l+β中每个待过滤点的至少两个坐标值可以指直角坐标系中的X轴坐标和Y轴坐标,其中,该直角坐标系的原点(0,0)可以设置在任意一点上,即以任意一点作为参考地建立该直角坐标系。具体地,假设将n个原始轨迹点P
1至P
n中第一轨迹点P
1的位置作为原点建立直角坐标系,以水平方向为X轴,垂直方向 为Y轴,对于获取的2β+1个待过滤点P
l-β至P
l+β中每个待过滤点都可以确定对应的X轴和Y轴。确定k个待过滤点P
m至P
m+k-1中每个待过滤点的X轴坐标的平均值,以及h个待过滤点P
m至P
m+h-1中每个待过滤点的Y轴坐标的平均值,将该X轴的平均值和该Y轴坐标的平均值分别确定为该2β+1个待过滤点P
l-β至P
l+β中第l个待过滤点P
l的X轴坐标和Y轴坐标。
可选地,该2β+1个待过滤点P
l-β至P
l+β中每个待过滤点的至少两个坐标值还可以为其它坐标系中的坐标值,在此不再一一赘述。
下面以直角坐标系的坐标值举例说明。例如,图6示出了根据本申请实施例的切尾均值过滤的示意图。如图6所示,服务器获取2β+1个待过滤点P
l-β至P
l+β分别为P
15至P
19,即β=2,l=17,每个待过滤点的坐标值如图6所示,其中,假设该直角坐标系取P
14的位置为原点,水平方向为X轴,垂直方向为Y轴。对于X轴坐标,将该5个待过滤点的X轴坐标按照大小顺序排列为(0,2,3,4,6),这里将切尾值设置为1,即取k=3,去掉1个最大值和1个最小值,剩下的3个坐标为(2,3,4);同样的,对于Y轴坐标,将该5个待过滤点的Y轴坐标按照大小顺序排列为(-0.5,0,0.2,0.5,2),这里同样可以将切尾值设置为1,即取h=3,去掉1个最大值和1个最小值,剩下的3个坐标为(0,0.2,0.5)。因此,计算获得X轴平均值X
new和Y轴平均值Y
new为:
因此,将X
new和Y
new作为点P
17的新的X轴和Y轴的坐标值(3,0.23),即如图6所示的P'
17为更新后的位置。
应理解,可以对该n个原始轨迹点P
1至P
n中每个轨迹点都进行该切尾均值过滤处理,或者,也可以对部分轨迹点进行切尾均值过滤处理,例如,仅对部分坐标值变化较大的点进行切尾均值过滤处理。可选地,可以设置差值阈值,在坐标值变化量小于该差值阈值时,确定坐标值变化较小,而不进行切尾均值过滤,但本申请实施例并不限于此。
以上面的实施例为例,由于原来的轨迹点P
17的坐标为(3,2),经过切尾均值处理后变为P'
17=(3,0.23),假设设置差值阈值为0.5。由于X轴坐标值的变化量为0,这里以Y轴坐标值变化为例。根据对该P
17采取切尾均值过滤的计算方法获得的Y轴坐标值0.23可知,变化量3-0.23=2.77,且2.77>0.5,因此,可以确定执行切尾均值过滤,更新P
17的坐标值为P'
17=(3,0.23)。假设这里计算获得的Y轴坐标不是0.23,而是1.9,由于1.9与原坐标值2相差为0.1,0.1小于0.5,因此,可以不对该轨迹点P
17采取切尾均值过滤,仍然使用P
17的原坐标值。
应理解,对于任意待过滤点P
l的至少两个坐标值,可以确定将部分或全部坐标值进行更新,本申请实施例并不限于此。
因此,切尾均值过滤可以通过联系前后若干个点的位置来将当前点的坐标进行一定的调整,使得轨迹的形状更加趋于平滑,对后续地图匹配起到了帮助的作用。
可选地,作为一个实施例,将该n个原始轨迹点P
1至P
n进行过滤处理,该过滤处理可以为过近点过滤。具体地,服务器在该n个原始轨迹点P
1至P
n中获取第y个待过滤点P
y和第y+1个待过滤点P
y+1;若该第y个待过滤点P
y和该第y+1个待过滤点P
y+1之间的距离小于或者等于预设距离,删除第y个待过滤点P
y和/或该第y+1个待过滤点P
y+1;否 则保留该两个待过滤点P
y和P
y+1。
可选地,服务器还可以在该n个原始轨迹点P
1至P
n中获取第y-1个待过滤点P
y-1、第y个待过滤点P
y和第y+1个待过滤点P
y+1;若该第y-1个待过滤点P
y-1和该第y个待过滤点P
y之间的距离小于或者等于预设距离,且该第y个待过滤点P
y和该第y+1个待过滤点P
y+1之间的距离也小于或者等于预设距离,则删除第y个待过滤点P
y;否则保留该待过滤点P
y。
应理解,该预设距离可以根据实际情况设置,例如,可以根据移动终端的移动速度和采样时间设置该预设距离,或者,还可以根据n个原始轨迹点P
1至P
n中每相邻两点之间的距离的平均值进行设置,本申请实施例并不限于此。
例如,图7示出了根据本申请实施例的过近点过滤的示意图。如图7所示,第y个待过滤点P
y可以依次取n个原始轨迹点P
1至P
n中的每一个轨迹点,这里以待过滤点P
15至P
23为例进行说明。分别计算P
15至P
23中每相邻两个待过滤点之间的距离,假设其中仅P
16P
17、P
17P
18、P
18P
19、P
19P
20和P
20P
21的距离小于或者等于预设距离。以P
16P
17为例,可以将P
16和P
17两点均删除,则类似的需要将P
16至P
21全部删除;或者,也可以将P
16或P
17删除,则删除P
16对应的删除P
16至P
20,删除P
17对应的删除P
17至P
21,即如图7所示,剩下的点为P
15、P
16、P
22和P
23;或者,将点P
16至P
21中两端距离均小于或者等于预设距离的待过滤点删除,即删除P
17至P
20。
因此,过近点过滤处理可以将由于移动终端的移动速度过慢或静止而造成的定位误差以及对地图匹配的影响给排除掉,解决了移动终端停留导致定位点漂移的问题。例如,该移动终端可以为车辆,车辆行驶过程中可能发生停车或减速,过近点过滤处理可以排除车辆停车或减速过程造成的定位误差。
应理解,由于在S120中的过滤处理可以包括上述差值过滤、速度过滤、角度过滤、扭曲度过滤、切尾均值过滤和过近点过滤中的至少一个,因此,在该过滤处理包括至少两个过滤处理过程时,对于任意一次的非首次过滤处理中的n个原始轨迹点P
1至P
n,可以为上一次过滤处理后剩余的轨迹点进行重新编号获得。
例如,以7个原始轨迹点P
1至P
7为例,假设经过一次处理后删除了点P
3和P
5,并将P6更新为P'
6,则剩余P
1、P
2、P
4、P'
6和P
7,重新编号获得P
1、P
2、P
3(原P
4)、P
4(原P'
6)和P
5(原P
7),即作为下一次处理时原始轨迹点,即下一次的n个原始轨迹点变为5个原始轨迹点P
1至P
5。
应理解,考虑到计算复杂度和精确度,可以任意选择差值过滤、速度过滤、角度过滤、扭曲度过滤、切尾均值过滤和过近点过滤中至少一种过滤方式。例如,对于角度过滤和扭曲度过滤,由于过程类似,可以仅选择其中一种执行。再例如,由于差值过滤较复杂且原始轨迹点完全重叠可能性较小,可以选择不执行差值过滤。再例如,考虑到计算效果,如果确定执行差值过滤,可以将该差值过滤设置为第一次过滤,之后再进行其他过滤过程。
可选地,考虑到最终的计算效果,可以依次进行速度过滤、角度过滤、切尾均值过滤和过近点过滤。或者,也可以依次进行差值过滤、速度过滤、、扭曲度过滤、切尾均值过滤和过近点过滤。
如图1所示,该方法100还包括:S130,根据对该n个原始轨迹点P
1至P
n进行该过滤处理得到的目标轨迹点,确定该移动终端在道路地图中的至少一条道路上的运动轨 迹,该道路地图包括多条道路。
在本申请实施例中,服务器获取道路地图,该道路地图中包括多条道路。具体地,本申请实施例中的道路地图可以使用现有的各种地图原数据,例如,可以使用全球最大的开源地图项目OpenStreetMap,简记为OSM。OSM官网下载的地图原文件为XML格式;或者,也可以使用其他地图格式,本申请实施例并不限于此。
在本申请实施例中,道路地图中可以包括多条道路,该道路可以分为许多种类,例如可以包括:高速公路(motorway)、主干线(trunk)、住宅区内路线(residential)以及一些无法归类的(unclassified)等等。其中,如果移动终端为车辆,那么可以按照车辆是否可以通过,将该多条道路分为可以通过和不可以通过的,例如,residential等级的道路一般车辆无法通过。
应理解,为了便于将移动终端的运动轨迹与道路地图相匹配,可以将原始的地图中的道路进行切割,获取包括多条道路的道路地图,例如根据道路与道路直接的交叉点进行切割,使得获得的道路地图中的每条道路为最短道路,即使得每条道路上只有首尾两个节点,道路中间不包括任何岔路。可选地,每条道路可以是双向的,也可以是单向的,本申请实施例并不限于此。
可选地,下面以OSM官网下载的XML格式的地图原文件为例,进行道路切割获取道路地图。在原地图中,可以用node标识地图中的点,该点可以为地图中的任意一个点,每个点可以有对应的经纬度信息;还可以用way标识原地图中的折线,可以为每一段way设置k值,当k值为“highway”时,表示该way对应标识了一条道路。
应理解,按照该地图中的道路级别,可以将道路等级从高到底分为motorway、trunk、primary、secondary、tertiary、unclassified、residential与service,由于最后两个等级(residential与service)是车辆无法通过的,这里假设以移动终端为车辆为例,因此在构建并切割原地图获取道路地图时,可以忽略这两个等级的道路。因此,这里仅将表示车辆可以通过的道路保留,即way标识地图中车辆可以通过的道路。
应理解,在原地图中可以用node标识任意一个点,为了获取道路地图,这里仅保留道路上的节点,即保留原地图中用node标识的道路上的节点,即当且仅当两个以上的way同时经过同一个node的情况下,保留该node,该node为道路网络中的节点,而其余的node都只是用来描述路段的形状,这里可以忽略不计。
在本申请实施例中,对每条way需要进行切割,当其中的node被多条way经过时,当前way需要被该node分割成两条路段,这样不停地分割直至一条路段保证只有首尾两个点是被多条way所经过的。具体地,可以通过下面的算法1获得切割后的道路地图。算法1描述了道路地图构建算法的流程,其中,N与W分别代表从OSM所读到的node与way;V为切割后获得的道路地图的顶点集,E为切割后获得的道路地图的边集;E’为一个临时边集,用来记录当前w被切割成的路段集合。split(E,n)函数的行为指:对边集合E中的每条边,检查是否有道路e经过n,如果存在e经过n,则将e根据n切割成两条边e
1和e
2。


应理解,服务器获取包括多条道路的道路地图,将经过上述过滤处理得到的目标轨迹点中每个目标轨迹点与道路地图中的道路相匹配,获得对应的至少一条道路。具体地,对n个原始轨迹点P
1至P
n进行该过滤处理得到m个目标轨迹点,m小于等于n,将该m个目标轨迹点与道路地图进行道路匹配,获得m条道路,其中,该m条道路中可以存在相同的道路。
可选地,可以通过多种算法将m个目标轨迹点与道路例如进行匹配,例如,考虑准确率和鲁棒性,可以采用基于隐马尔可夫模型(Hidden Markov Model,HMM)进行道路匹配,HMM的地图匹配具有最好的准确率和鲁棒性。具体地,HMM是马尔可夫链的一种,它的状态不能直接观察到,但能通过观测序列观察到,假设节点O
1,O
2,…,O
n为观测到的序列,HMM假设每个观测到的序列由对应的隐状态产生,对应有H
1,H
2,…,H
n为隐状态序列,每个隐状态都与前一个隐状态相关,而不与更前面的隐状态相关。HMM地图匹配算法将每个观测点对应的真实路段作为隐状态,移动终端看作在隐状态中进行转移(即路段的转移),每一个隐状态生成一个观测到的状态(即实际获取的目标轨迹点位置)。通过求出给定观测状态下的最大概率的隐状态序列来得到轨迹匹配后的路径(即路段序列)。
具体地,对于道路地图匹配过程,要对两个概率进行建模。第一个为放射概率,也叫做测量概率,表示的是从空间测量来看,一条路段匹配该状态的概率。图8示出了根据本申请实施例的道路地图匹配方法的示意图,如图8所示,对于获得的过滤后的m个目 标轨迹点Z
1至Z
m,取任意一个目标轨迹点Z
i,对于候选的道路r
a,其放射概率记为P(Z
i|r
a),该概率描述了目标轨迹点Z
i在道路r
a上的似然。直观上地有,候选路段离采样点距离越远,则实际在该路段运动的可能性也越小,它的放射概率也就越小。假定定位数据误差服从高斯分布,因此有:

其中,如图8所示,X
i,
a为Z
i在r
a上的投影点。
第二个需要建模的为转移概率。对于任意一个目标轨迹点Z
i有一系列候选的匹配道路路段,例如道路r
a,r
b…。转移概率表示的是从当前状态转移到下一个状态的概率。直观上来看,实际上的行驶路径一般都会尽可能地接近最短路径,因此道路上的距离与最短距离相差越大,则其转移概率也越低。
对于任意一个目标轨迹点Z
i,其候选的匹配道路为路段r
a;目标轨迹点Z
i的下一个目标轨迹点Z
i+1,其候选的匹配道路为路段r
b,记X
i+1,
b为目标轨迹点Z
i+1在路段r
b上的投影点,则从Z
i匹配的r
a到Z
i+1匹配的r
b上的转移概率为:
其中δ
i=|dist(Z
i,Z
i+1)-dist
G(X
i,a,X
i+1,b)|;dist(Z
i,Z
i+1)为目标轨迹点Z
i和Z
i+1之间的实际距离;dist
G(X
i,a,X
i+1,b)为X
i,a和X
i+1,b在道路上的距离,即图8中从X
i,a到X
i+1,b的灰色折线的长度。
对于一条待匹配的轨迹,即m个目标轨迹点Z=Z
1→Z
2→…→Z
m,找出其对应的匹配后的m个道路路段R*=r
1,r
2,…,r
m应该满足:
R
*=arg max
RP(R|Z)
对P(R|Z)展开,利用马尔可夫链的一阶马尔可夫性质,有:
P(R|Z)∝P(Z|R)P(R)
=P(Z
1,Z
2,…,Z
m|r
1,r
2,…,r
m)P(r
1,r
2,…,r
m)
=∏P(Z
i|r
i)∏P(rj|r
i)
其中P(z
i|r
i)为放射概率,P(r
j|r
i)为转移概率。使用Viterbi算法即可求出一个状态序列R,使得整个序列的后验概率最大,该序列R即对应了m条与m个目标轨迹点对应的道路。
在本申请实施例中,根据m个目标轨迹点获取m条道路;根据该m条道路确定移动终端在道路地图上的移动轨迹。具体地,对于获得的m条道路,可以通过多种算法确定移动终端在道路地图上的移动轨迹。例如,可以通过下述方法确定,这里以相邻的目标轨迹点Z
i和Z
i+1为例,确定移动终端对应目标轨迹点Z
i和Z
i+1的实际行驶路径,其中,Z
i匹配后的道路记为r
i,Z
i+1匹配后的道路记为r
i+1;服务器确定的移动终端从Z
i移动到Z
i+1的实际道路路径标记为R
i。
具体地,若r
i=r
i+1,即道路r
i和道路r
i+1为同一条道路时,R
i={r
i},即移动终端一直在道路r
i上移动。若r
i≠r
i+1,且r
i和r
i+1相邻,即道路r
i和道路r
i+1不是同一条道路,但道路r
i和道路r
i+1的首尾相连时,R
i={r
i,r
i+1},即移动终端的运动轨迹为从道路r
i至道路r
i+1。 若r
i≠r
i+1,且r
i和r
i+1也不相邻,即道路r
i和道路r
i+1不是同一条道路,且道路r
i和道路r
i+1之间不连接时,确定道路r
i的末端,标记为r
i,s,确定道路r
i+1的首端,标记为r
i+1,e,根据r
i,s和r
i+1,e,确定从r
i,s到r
i+1,e的最短道路路径,标记为r’,则R
i={r
i}+r’+{r
i+1},例如,如图9所示,根据r
i,s和r
i+1,e的位置可知,从r
i,s到r
i+1,e的最短道路路径即为图中r’,因此,移动终端的运动轨迹则为从道路r
i至最短道路路径r’,再到道路r
i+1,例如图9中灰色线段所示的路径。
以此类推,将m个目标轨迹点对应的m条道路根据上述方式进行匹配,获得连续的至少一条道路即为移动终端在道路地图上的运动轨迹。
因此,本申请实施例的确定运动轨迹的方法,通过对获取移动终端在运动过程中的n个原始轨迹点进行至少一种过滤处理获得m个目标轨迹点,再对该m个目标轨迹点进行道路地图匹配,进而获得移动终端的运动轨迹,能够过滤或改变原始的轨迹点中误差较大以及起到了负面作用的轨迹点,使得经过处理的目标轨迹点在进行地图匹配时更加准确,尤其针对基站定位这样的高噪声的数据获取方式,以及快速定位这种特殊的情况,使得后续地图匹配过程更加准确,获得的运动轨迹更加符合实际情况。
应理解,在本申请的各种实施例中,上述各过程的序号的大小并不意味着执行顺序的先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本申请实施例的实施过程构成任何限定。
另外,本文中术语“和/或”,仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,A和/或B,可以表示:单独存在A,同时存在A和B,单独存在B这三种情况。另外,本文中字符“/”,一般表示前后关联对象是一种“或”的关系。
上文中结合图1至9,详细描述了根据本申请实施例的确定运动轨迹的方法,下面将结合图10至图11,描述根据本申请实施例的确定运动轨迹的装置。
如图10所示,根据本申请实施例的确定运动轨迹的装置200包括:获取单元210、处理单元220和确定单元230。
该获取单元210用于:获取移动终端在运动过程中的n个原始轨迹点P
1至P
n的位置,其中,该移动终端经过该n个原始轨迹点P
1至P
n中第i个原始轨迹点P
i的时刻早于经过第i+1个原始轨迹点P
i+1的时刻,n为正整数。
该处理单元220用于:将该n个原始轨迹点P
1至P
n进行过滤处理,该过滤处理用于删除该n个原始轨迹点P
1至P
n中的至少一个原始轨迹点,和/或更新该n个原始轨迹点P
1至P
n中的至少一个原始轨迹点的位置。
该确定单元230用于:根据对该n个原始轨迹点P
1至P
n进行该过滤处理得到的目标轨迹点,确定该移动终端在道路地图中的至少一条道路上的运动轨迹,该道路地图包括多条道路。
因此,本申请实施例的确定运动轨迹的装置,通过对获取移动终端在运动过程中的n个原始轨迹点进行至少一种过滤处理获得m个目标轨迹点,再对该m个目标轨迹点进行道路地图匹配,进而获得移动终端的运动轨迹,能够过滤或改变原始的轨迹点中误差较大以及起到了负面作用的轨迹点,使得经过处理的目标轨迹点在进行地图匹配时更加准确,尤其针对基站定位这样的高噪声的数据获取方式,以及快速定位这种特殊的情况,使得后续地图匹配过程更加准确,获得的运动轨迹更加符合实际情况。
可选地,该处理单元220具体用于:在该n个原始轨迹点P
1至P
n中获取a个待过滤点P
x至P
x+a-1,该a个待过滤点P
x至P
x+a-1位于第一位置,x和a为正整数;在该n个原始轨迹点P
1至P
n中获取b个待过滤点P
x+a至P
x+a+b-1,该b个待过滤点P
x+a至P
x+a+b-1位于第二位置,b为大于1的正整数;在该n个原始轨迹点P
1至P
n中获取c个待过滤点P
x+a+b至P
x+a+b+c-1,该c个待过滤点P
x+a+b至P
x+a+b+c-1位于第三位置,c为正整数,x+a+b+c-1小于或者等于n;在该第一位置到该第二位置的直线上均匀排列待过滤点
 至
至
 在该第二位置到该第三位置的直线上均匀排列待过滤点
在该第二位置到该第三位置的直线上均匀排列待过滤点
 至
至

 表示向下取整。
表示向下取整。
可选地,该处理单元220具体用于:获取n个原始轨迹点P
1至P
n中的第一待过滤点P
a的速度,a为小于或者等于n的正整数;若该第一待过滤点P
a的速度大于或者等于预设速度,删除该第一待过滤点P
a。
可选地,该处理单元220具体用于:在该n个原始轨迹点P
1至P
n中获取该第一待过滤点P
a和第二待过滤点P
b,b=a+1或者b=a-1,a小于n;确定从该第一待过滤点P
a到该第二待过滤点P
b的平均速度为该第一待过滤点P
a的速度。
可选地,该处理单元220具体用于:在该n个原始轨迹点P
1至P
n中获取4个待过滤点P
c、P
c+1、P
c+2和P
c+3,c为正整数,c+3小于或者等于n;确定第一角度∠P
cP
c+1P
c+2和第二角度∠P
c+1P
c+2P
c+3;若该第一角度小于或者等于第一预设角度且该第二角度小于或者等于第二预设角度,删除该4个待过滤点P
c、P
c+1、P
c+2和P
c+3中的待过滤点P
c+1或者待过滤点P
c+2。
可选地,该处理单元220具体用于:在该n个原始轨迹点P
1至P
n中,获取2α+1个待过滤点P
f-α至P
f+α,f和α为正整数,f大于α;确定该2α+1个待过滤点P
f-α至P
f+α中待过滤点P
g与相邻的待过滤点P
g+1之间的距离,g取f-α至f+α-1,获得2α个距离;确定该2α+1个待过滤点P
f-α至P
f+α中第一个待过滤点P
f-α与最后一个待过滤点P
f+α之间的距离为第一距离;确定该2α个距离之和与该第一距离的商为扭曲度;当该扭曲度大于或等于预设扭曲度时,删除该2α+1个待过滤点P
f-α至P
f+α中第α+1个待过滤点P
f。
可选地,该处理单元220具体用于:在该n个原始轨迹点P
1至P
n中,获取2β+1个待过滤点P
l-β至P
l+β,l和β为正整数,l大于β;在该2β+1个待过滤点P
l-β至P
l+β中,确定k个待过滤点中每个待过滤点的经度的平均值,以及h个待过滤点中每个待过滤点的纬度的平均值,k和h为小于2β+1的正整数;将该经度的平均值和该纬度的平均值分别确定为该2β+1个待过滤点P
l-β至P
l+β中第β+1个待过滤点P
l的经度和纬度。
可选地,该处理单元220具体用于:在该n个原始轨迹点P
1至P
n中获取第y个待过滤点P
y和第y+1个待过滤点P
y+1;若该第y个待过滤点P
y和该第y+1个待过滤点P
y+1之间的距离小于或者等于预设距离,删除第y个待过滤点P
y和/或该第y+1个待过滤点P
y+1。
应理解,根据本申请实施例的确定运动轨迹的装置200可对应于执行本申请实施例中的方法100,并且该装置200中的各个单元的上述和其它操作和/或功能分别为了实现图1至图9中的各个方法中服务器的相应流程,为了简洁,在此不再赘述。
因此,本申请实施例的确定运动轨迹的装置,通过对获取移动终端在运动过程中的n个原始轨迹点进行至少一种过滤处理获得m个目标轨迹点,再对该m个目标轨迹点进行道路地图匹配,进而获得移动终端的运动轨迹,能够过滤或改变原始的轨迹点中误差较 大以及起到了负面作用的轨迹点,使得经过处理的目标轨迹点在进行地图匹配时更加准确,尤其针对基站定位这样的高噪声的数据获取方式,以及快速定位这种特殊的情况,使得后续地图匹配过程更加准确,获得的运动轨迹更加符合实际情况。
图11示出了根据本申请实施例的确定运动轨迹的装置300的示意性框图,如图11所示,该装置300包括:处理器310,可选地,该装置300还包括存储器320,存储器320与处理器310相连。其中,处理器310和存储器320之间可以通过内部连接通路互相通信,传递和/或控制数据信号,该存储器320可以用于存储指令,该处理器310用于执行该存储器320存储的指令,该处理器310用于:获取移动终端在运动过程中的n个原始轨迹点P
1至P
n的位置,其中,该移动终端经过该n个原始轨迹点P
1至P
n中第i个原始轨迹点P
i的时刻早于经过第i+1个原始轨迹点P
i+1的时刻,n为正整数;将该n个原始轨迹点P
1至P
n进行过滤处理,该过滤处理用于删除该n个原始轨迹点P
1至P
n中的至少一个原始轨迹点,和/或更新该n个原始轨迹点P
1至P
n中的至少一个原始轨迹点的位置;根据对该n个原始轨迹点P
1至P
n进行该过滤处理得到的目标轨迹点,确定该移动终端在道路地图中的至少一条道路上的运动轨迹,该道路地图包括多条道路。
因此,本申请实施例的确定运动轨迹的装置,通过对获取移动终端在运动过程中的n个原始轨迹点进行至少一种过滤处理获得m个目标轨迹点,再对该m个目标轨迹点进行道路地图匹配,进而获得移动终端的运动轨迹,能够过滤或改变原始的轨迹点中误差较大以及起到了负面作用的轨迹点,使得经过处理的目标轨迹点在进行地图匹配时更加准确,尤其针对基站定位这样的高噪声的数据获取方式,以及快速定位这种特殊的情况,使得后续地图匹配过程更加准确,获得的运动轨迹更加符合实际情况。
可选地,作为一个实施例,该处理器310用于:在该n个原始轨迹点P
1至P
n中获取a个待过滤点P
x至P
x+a-1,该a个待过滤点P
x至P
x+a-1位于第一位置,x和a为正整数;在该n个原始轨迹点P
1至P
n中获取b个待过滤点P
x+a至P
x+a+b-1,该b个待过滤点P
x+a至P
x+a+b-1位于第二位置,b为大于1的正整数;在该n个原始轨迹点P
1至P
n中获取c个待过滤点P
x+a+b至P
x+a+b+c-1,该c个待过滤点P
x+a+b至P
x+a+b+c-1位于第三位置,c为正整数,x+a+b+c-1小于或者等于n;在该第一位置到该第二位置的直线上均匀排列待过滤点
 至
至
 在该第二位置到该第三位置的直线上均匀排列待过滤点
在该第二位置到该第三位置的直线上均匀排列待过滤点
 至
至

 表示向下取整。
表示向下取整。
可选地,作为一个实施例,该处理器310用于:获取n个原始轨迹点P
1至P
n中的第一待过滤点P
a的速度,a为小于或者等于n的正整数;若该第一待过滤点P
a的速度大于或者等于预设速度,删除该第一待过滤点P
a。
可选地,作为一个实施例,该处理器310用于:在该n个原始轨迹点P
1至P
n中获取该第一待过滤点P
a和第二待过滤点P
b,b=a+1或者b=a-1,a小于n;确定从该第一待过滤点P
a到该第二待过滤点P
b的平均速度为该第一待过滤点P
a的速度。
可选地,作为一个实施例,该处理器310用于:在该n个原始轨迹点P
1至P
n中获取4个待过滤点P
c、P
c+1、P
c+2和P
c+3,c为正整数,c+3小于或者等于n;确定第一角度∠P
cP
c+1P
c+2和第二角度∠P
c+1P
c+2P
c+3;若该第一角度小于或者等于第一预设角度且该第二角度小于或者等于第二预设角度,删除该4个待过滤点P
c、P
c+1、P
c+2和P
c+3中的待过滤点P
c+1或者待过滤点P
c+2。
可选地,作为一个实施例,该处理器310用于:在该n个原始轨迹点P
1至P
n中,获取2α+1个待过滤点P
f-α至P
f+α,f和α为正整数,f大于α;确定该2α+1个待过滤点P
f-α至P
f+α中待过滤点P
g与相邻的待过滤点P
g+1之间的距离,g取f-α至f+α-1,获得2α个距离;确定该2α+1个待过滤点P
f-α至P
f+α中第一个待过滤点P
f-α与最后一个待过滤点P
f+α之间的距离为第一距离;确定该2α个距离之和与该第一距离的商为扭曲度;当该扭曲度大于或等于预设扭曲度时,删除该2α+1个待过滤点P
f-α至P
f+α中第α+1个待过滤点P
f。
可选地,作为一个实施例,该处理器310用于:在该n个原始轨迹点P
1至P
n中,获取2β+1个待过滤点P
l-β至P
l+β,l和β为正整数,l大于β;在该2β+1个待过滤点P
l-β至P
l+β中,确定k个待过滤点中每个待过滤点的经度的平均值,以及h个待过滤点中每个待过滤点的纬度的平均值,k和h为小于2β+1的正整数;将该经度的平均值和该纬度的平均值分别确定为该2β+1个待过滤点P
l-β至P
l+β中第β+1个待过滤点P
l的经度和纬度。
可选地,作为一个实施例,该处理器310用于:在该n个原始轨迹点P
1至P
n中获取第y个待过滤点P
y和第y+1个待过滤点P
y+1;若该第y个待过滤点P
y和该第y+1个待过滤点P
y+1之间的距离小于或者等于预设距离,删除第y个待过滤点P
y和/或该第y+1个待过滤点P
y+1。
应理解,根据本申请实施例的确定运动轨迹的装置300可对应于本申请实施例中的装置200,并可以对应于执行根据本申请实施例的方法100中的相应主体,并且装置300中的各个单元的上述和其它操作和/或功能分别为了实现图1至图9中的各个方法中服务器的相应流程,为了简洁,在此不再赘述。
因此,本申请实施例的确定运动轨迹的装置,通过对获取移动终端在运动过程中的n个原始轨迹点进行至少一种过滤处理获得m个目标轨迹点,再对该m个目标轨迹点进行道路地图匹配,进而获得移动终端的运动轨迹,能够过滤或改变原始的轨迹点中误差较大以及起到了负面作用的轨迹点,使得经过处理的目标轨迹点在进行地图匹配时更加准确,尤其针对基站定位这样的高噪声的数据获取方式,以及快速定位这种特殊的情况,使得后续地图匹配过程更加准确,获得的运动轨迹更加符合实际情况。
应注意,本申请上述方法实施例可以应用于处理器中,或者由处理器实现。处理器可能是一种集成电路芯片,具有信号的处理能力。在实现过程中,上述方法实施例的各步骤可以通过处理器中的硬件的集成逻辑电路或者软件形式的指令完成。上述的处理器可以是通用处理器、数字信号处理器(Digital Signal Processor,DSP)、专用集成电路(Application Specific Integrated Circuit,ASIC)、现成可编程门阵列(Field Programmable Gate Array,FPGA)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件。可以实现或者执行本申请实施例中的公开的各方法、步骤及逻辑框图。通用处理器可以是微处理器或者该处理器也可以是任何常规的处理器等。结合本申请实施例所公开的方法的步骤可以直接体现为硬件译码处理器执行完成,或者用译码处理器中的硬件及软件模块组合执行完成。软件模块可以位于随机存储器,闪存、只读存储器,可编程只读存储器或者电可擦写可编程存储器、寄存器等本领域成熟的存储介质中。该存储介质位于存储器,处理器读取存储器中的信息,结合其硬件完成上述方法的步骤。
可以理解,本申请实施例中的存储器可以是易失性存储器或非易失性存储器,或可包括易失性和非易失性存储器两者。其中,非易失性存储器可以是只读存储器(Read-Only Memory,ROM)、可编程只读存储器(Programmable ROM,PROM)、可擦除可编程只读存储器(Erasable PROM,EPROM)、电可擦除可编程只读存储器(Electrically EPROM,EEPROM)或闪存。易失性存储器可以是随机存取存储器(Random Access Memory,RAM),其用作外部高速缓存。通过示例性但不是限制性说明,许多形式的RAM可用,例如静态随机存取存储器(Static RAM,SRAM)、动态随机存取存储器(Dynamic RAM,DRAM)、同步动态随机存取存储器(Synchronous DRAM,SDRAM)、双倍数据速率同步动态随机存取存储器(Double Data Rate SDRAM,DDR SDRAM)、增强型同步动态随机存取存储器(Enhanced SDRAM,ESDRAM)、同步连接动态随机存取存储器(Synchlink DRAM,SLDRAM)和直接内存总线随机存取存储器(Direct Rambus RAM,DR RAM)。应注意,本文描述的系统和方法的存储器旨在包括但不限于这些和任意其它适合类型的存储器。
本领域普通技术人员可以意识到,结合本文中所公开的实施例描述的各示例的单元及算法步骤,能够以电子硬件、或者计算机软件和电子硬件的结合来实现。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本申请的范围。
所属领域的技术人员可以清楚地了解到,为描述的方便和简洁,上述描述的系统、装置和单元的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赘述。
在本申请所提供的几个实施例中,应该理解到,所揭露的系统、装置和方法,可以通过其它的方式实现。例如,以上所描述的装置实施例仅仅是示意性的,例如,所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口,装置或单元的间接耦合或通信连接,可以是电性,机械或其它的形式。
所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
另外,在本申请各个实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。
所述功能如果以软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储介质中。基于这样的理解,本申请的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质中,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行本申请各个实施例所述方法的全部或部分步骤。而前述的存储介质包括:U盘、移动硬盘、只读存储器(Read-Only Memory,ROM)、随机存取存储器(Random Access Memory,RAM)、磁碟或者光盘等各种可以存储程序代码的介质。
以上所述,仅为本申请的具体实施方式,但本申请的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本申请揭露的技术范围内,可轻易想到变化或替换,都应涵盖 在本申请的保护范围之内。因此,本申请的保护范围应以所述权利要求的保护范围为准。
Claims (17)
- 一种确定运动轨迹的方法,其特征在于,包括:获取移动终端在运动过程中的n个原始轨迹点P 1至P n的位置,其中,所述移动终端经过所述n个原始轨迹点P 1至P n中第i个原始轨迹点P i的时刻早于经过第i+1个原始轨迹点P i+1的时刻,n为正整数;将所述n个原始轨迹点P 1至P n进行过滤处理,所述过滤处理用于删除所述n个原始轨迹点P 1至P n中的至少一个原始轨迹点,和/或更新所述n个原始轨迹点P 1至P n中的至少一个原始轨迹点的位置;根据对所述n个原始轨迹点P 1至P n进行所述过滤处理得到的目标轨迹点,确定所述移动终端在道路地图中的至少一条道路上的运动轨迹,所述道路地图包括多条道路。
- 根据权利要求1所述的方法,其特征在于,所述将所述n个原始轨迹点P 1至P n进行过滤处理,包括:在所述n个原始轨迹点P 1至P n中获取a个待过滤点P x至P x+a-1,所述a个待过滤点P x至P x+a-1位于第一位置,x和a为正整数;在所述n个原始轨迹点P 1至P n中获取b个待过滤点P x+a至P x+a+b-1,所述b个待过滤点P x+a至P x+a+b-1位于第二位置,b为大于1的正整数;在所述n个原始轨迹点P 1至P n中获取c个待过滤点P x+a+b至P x+a+b+c-1,所述c个待过滤点P x+a+b至P x+a+b+c-1位于第三位置,c为正整数,x+a+b+c-1小于或者等于n;在所述第一位置到所述第二位置的直线上均匀排列待过滤点至

 在所述第二位置到所述第三位置的直线上均匀排列待过滤点至
在所述第二位置到所述第三位置的直线上均匀排列待过滤点至
 表示向下取整。
表示向下取整。
- 根据权利要求1所述的方法,其特征在于,所述将所述n个原始轨迹点P 1至P n进行过滤处理,包括:获取n个原始轨迹点P 1至P n中的第一待过滤点P a的速度,a为小于或者等于n的正整数;若所述第一待过滤点P a的速度大于或者等于预设速度,删除所述第一待过滤点P a。
- 根据权利要求3所述的方法,其特征在于,所述获取n个原始轨迹点P 1至P n中的第一待过滤点P a的速度,包括:在所述n个原始轨迹点P 1至P n中获取所述第一待过滤点P a和第二待过滤点P b,b=a+1或者b=a-1,a小于n;确定从所述第一待过滤点P a到所述第二待过滤点P b的平均速度为所述第一待过滤点P a的速度。
- 根据权利要求1所述的方法,其特征在于,所述将所述n个原始轨迹点P 1至P n进行过滤处理,包括:在所述n个原始轨迹点P 1至P n中获取4个待过滤点P c、P c+1、P c+2和P c+3,c为正整数,c+3小于或者等于n;确定第一角度∠P cP c+1P c+2和第二角度∠P c+1P c+2P c+3;若所述第一角度小于或者等于第一预设角度且所述第二角度小于或者等于第二预设角度,删除所述4个待过滤点P c、P c+1、P c+2和P c+3中的待过滤点P c+1或者待过滤点P c+2。
- 根据权利要求1所述的方法,其特征在于,所述将所述n个原始轨迹点P 1至P n进行过滤处理,包括:在所述n个原始轨迹点P 1至P n中,获取2α+1个待过滤点P f-α至P f+α,f和α为正整数,f大于α;确定所述2α+1个待过滤点P f-α至P f+α中待过滤点P g与相邻的待过滤点P g+1之间的距离,g取f-α至f+α-1,获得2α个距离;确定所述2α+1个待过滤点P f-α至P f+α中第一个待过滤点P f-α与最后一个待过滤点P f+α之间的距离为第一距离;确定所述2α个距离之和与所述第一距离的商为扭曲度;当所述扭曲度大于或等于预设扭曲度时,删除所述2α+1个待过滤点P f-α至P f+α中第α+1个待过滤点P f。
- 根据权利要求1所述的方法,其特征在于,所述将所述n个原始轨迹点P 1至P n进行过滤处理,包括:在所述n个原始轨迹点P 1至P n中,获取2β+1个待过滤点P l-β至P l+β,l和β为正整数,l大于β;在所述2β+1个待过滤点P l-β至P l+β中,确定k个待过滤点中每个待过滤点的经度的平均值,以及h个待过滤点中每个待过滤点的纬度的平均值,k和h为小于2β+1的正整数;将所述经度的平均值和所述纬度的平均值分别确定为所述2β+1个待过滤点P l-β至P l+β中第β+1个待过滤点P l的经度和纬度。
- 根据权利要求1所述的方法,其特征在于,所述将所述n个原始轨迹点P 1至P n进行过滤处理,包括:在所述n个原始轨迹点P 1至P n中获取第y个待过滤点P y和第y+1个待过滤点P y+1;若所述第y个待过滤点P y和所述第y+1个待过滤点P y+1之间的距离小于或者等于预设距离,删除第y个待过滤点P y和/或所述第y+1个待过滤点P y+1。
- 一种确定运动轨迹的装置,其特征在于,包括:获取单元,用于获取移动终端在运动过程中的n个原始轨迹点P 1至P n的位置,其中,所述移动终端经过所述n个原始轨迹点P 1至P n中第i个原始轨迹点P i的时刻早于经过第i+1个原始轨迹点P i+1的时刻,n为正整数;处理单元,用于将所述n个原始轨迹点P 1至P n进行过滤处理,所述过滤处理用于删除所述n个原始轨迹点P 1至P n中的至少一个原始轨迹点,和/或更新所述n个原始轨迹点P 1至P n中的至少一个原始轨迹点的位置;确定单元,用于根据对所述n个原始轨迹点P 1至P n进行所述过滤处理得到的目标轨迹点,确定所述移动终端在道路地图中的至少一条道路上的运动轨迹,所述道路地图包括多条道路。
- 根据权利要求9所述的装置,其特征在于,所述处理单元具体用于:在所述n个原始轨迹点P 1至P n中获取a个待过滤点P x至P x+a-1,所述a个待过滤点 P x至P x+a-1位于第一位置,x和a为正整数;在所述n个原始轨迹点P 1至P n中获取b个待过滤点P x+a至P x+a+b-1,所述b个待过滤点P x+a至P x+a+b-1位于第二位置,b为大于1的正整数;在所述n个原始轨迹点P 1至P n中获取c个待过滤点P x+a+b至P x+a+b+c-1,所述c个待过滤点P x+a+b至P x+a+b+c-1位于第三位置,c为正整数,x+a+b+c-1小于或者等于n;在所述第一位置到所述第二位置的直线上均匀排列待过滤点至

 在所述第二位置到所述第三位置的直线上均匀排列待过滤点至
在所述第二位置到所述第三位置的直线上均匀排列待过滤点至
 表示向下取整。
表示向下取整。
- 根据权利要求9所述的装置,其特征在于,所述处理单元具体用于:获取n个原始轨迹点P 1至P n中的第一待过滤点P a的速度,a为小于或者等于n的正整数;若所述第一待过滤点P a的速度大于或者等于预设速度,删除所述第一待过滤点P a。
- 根据权利要求11所述的装置,其特征在于,所述处理单元具体用于:在所述n个原始轨迹点P 1至P n中获取所述第一待过滤点P a和第二待过滤点P b,b=a+1或者b=a-1,a小于n;确定从所述第一待过滤点P a到所述第二待过滤点P b的平均速度为所述第一待过滤点P a的速度。
- 根据权利要求9所述的装置,其特征在于,所述处理单元具体用于:在所述n个原始轨迹点P 1至P n中获取4个待过滤点P c、P c+1、P c+2和P c+3,c为正整数,c+3小于或者等于n;确定第一角度∠P cP c+1P c+2和第二角度∠P c+1P c+2P c+3;若所述第一角度小于或者等于第一预设角度且所述第二角度小于或者等于第二预设角度,删除所述4个待过滤点P c、P c+1、P c+2和P c+3中的待过滤点P c+1或者待过滤点P c+2。
- 根据权利要求9所述的装置,其特征在于,所述处理单元具体用于:在所述n个原始轨迹点P 1至P n中,获取2α+1个待过滤点P f-α至P f+α,f和α为正整数,f大于α;确定所述2α+1个待过滤点P f-α至P f+α中待过滤点P g与相邻的待过滤点P g+1之间的距离,g取f-α至f+α-1,获得2α个距离;确定所述2α+1个待过滤点P f-α至P f+α中第一个待过滤点P f-α与最后一个待过滤点P f+α之间的距离为第一距离;确定所述2α个距离之和与所述第一距离的商为扭曲度;当所述扭曲度大于或等于预设扭曲度时,删除所述2α+1个待过滤点P f-α至P f+α中第α+1个待过滤点P f。
- 根据权利要求9所述的装置,其特征在于,所述处理单元具体用于:在所述n个原始轨迹点P 1至P n中,获取2β+1个待过滤点P l-β至P l+β,l和β为正整数,l大于β;在所述2β+1个待过滤点P l-β至P l+β中,确定k个待过滤点中每个待过滤点的经度的平均值,以及h个待过滤点中每个待过滤点的纬度的平均值,k和h为小于2β+1的正整数;将所述经度的平均值和所述纬度的平均值分别确定为所述2β+1个待过滤点P l-β至P l+β中第β+1个待过滤点P l的经度和纬度。
- 根据权利要求9所述的装置,其特征在于,所述处理单元具体用于:在所述n个原始轨迹点P 1至P n中获取第y个待过滤点P y和第y+1个待过滤点P y+1;若所述第y个待过滤点P y和所述第y+1个待过滤点P y+1之间的距离小于或者等于预设距离,删除第y个待过滤点P y和/或所述第y+1个待过滤点P y+1。
- 一种计算机可读介质,用于存储计算机程序,该计算机程序包括用于执行权利要求1至8中任一项所述的方法的指令。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP18834716.5A EP3640596A4 (en) | 2017-07-18 | 2018-07-06 | METHOD AND APPARATUS FOR DETERMINING A MOVEMENT TRAJECTORY |
| US16/746,666 US20200151885A1 (en) | 2017-07-18 | 2020-01-17 | Method and apparatus for determining moving track |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201710586941.1A CN109269514A (zh) | 2017-07-18 | 2017-07-18 | 确定运动轨迹的方法和装置 |
| CN201710586941.1 | 2017-07-18 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US16/746,666 Continuation US20200151885A1 (en) | 2017-07-18 | 2020-01-17 | Method and apparatus for determining moving track |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019015485A1 true WO2019015485A1 (zh) | 2019-01-24 |
Family
ID=65015376
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/CN2018/094740 Ceased WO2019015485A1 (zh) | 2017-07-18 | 2018-07-06 | 确定运动轨迹的方法和装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20200151885A1 (zh) |
| EP (1) | EP3640596A4 (zh) |
| CN (1) | CN109269514A (zh) |
| WO (1) | WO2019015485A1 (zh) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110991525A (zh) * | 2019-11-29 | 2020-04-10 | 西安交通大学 | 基于运营商轨迹数据的伴随模式匹配方法 |
| CN113806426A (zh) * | 2021-11-16 | 2021-12-17 | 亿海蓝(北京)数据技术股份公司 | 轨迹数据的处理方法、装置、可读存储介质和电子设备 |
| WO2022134649A1 (zh) * | 2020-12-24 | 2022-06-30 | 南方科技大学 | 城市人流监控方法、装置、电子设备及存储介质 |
| CN114838735A (zh) * | 2022-03-21 | 2022-08-02 | 福建盛海智能科技有限公司 | 一种基于movebase的路径循迹方法及终端 |
| WO2025044309A1 (zh) * | 2023-08-25 | 2025-03-06 | 江苏东成工具科技有限公司 | 一种轨迹处理方法、装置和计算机可读存储介质 |
Families Citing this family (37)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11574263B2 (en) | 2013-03-15 | 2023-02-07 | Via Transportation, Inc. | System and method for providing multiple transportation proposals to a user |
| EP3631707B1 (en) | 2017-05-22 | 2026-03-11 | Via Transportation, Inc. | Systems and methods for managing ridesharing vehicles |
| US12461537B2 (en) | 2018-01-08 | 2025-11-04 | Via Transportation, Inc. | Accounting for driver reaction time when providing driving instructions |
| CN110858990B (zh) * | 2018-08-22 | 2021-04-20 | 华为技术有限公司 | 一种网络重选的方法及装置 |
| CN111857113B (zh) * | 2019-04-12 | 2023-11-03 | 北京地平线机器人技术研发有限公司 | 可移动设备的定位方法及定位装置 |
| US11218887B2 (en) * | 2019-10-15 | 2022-01-04 | Cisco Technology, Inc. | Switching of networks for a mobile device using location based predictive algorithm |
| CN110650437B (zh) * | 2019-11-27 | 2020-02-18 | 苏宁云计算有限公司 | 电子围栏上的围栏点删除方法、装置及计算机设备 |
| CN112985430B (zh) * | 2019-12-13 | 2024-06-25 | 百度在线网络技术(北京)有限公司 | 地图匹配的容灾方法、装置、设备及存储介质 |
| CN111368014B (zh) * | 2019-12-23 | 2024-04-19 | 广东小天才科技有限公司 | 一种运动轨迹的生成方法、终端设备及存储介质 |
| CN111158368B (zh) * | 2019-12-31 | 2024-02-02 | 深圳市优必选科技股份有限公司 | 一种双足机器人及其轨迹跟随方法和装置 |
| CN111723304B (zh) * | 2020-01-03 | 2023-07-14 | 腾讯科技(深圳)有限公司 | 一种轨迹点识别方法和相关装置 |
| CN113408973A (zh) * | 2020-03-17 | 2021-09-17 | 北京京东振世信息技术有限公司 | 生成轨迹数据的方法和装置 |
| CN113495939A (zh) * | 2020-04-08 | 2021-10-12 | 中移智行网络科技有限公司 | 基于道格拉斯-普克算法的车辆轨迹纠偏方法和装置 |
| CN113539050B (zh) * | 2020-04-20 | 2022-09-23 | 华为技术有限公司 | 数据处理方法、装置及设备 |
| CN111679297A (zh) * | 2020-05-08 | 2020-09-18 | 四川超影科技有限公司 | 一种gps定位轨迹的噪声点漂移去除方法 |
| CN111615061B (zh) * | 2020-05-09 | 2022-02-15 | 国家计算机网络与信息安全管理中心山东分中心 | 移动终端轨迹数据的去噪方法及装置 |
| CN111735461B (zh) * | 2020-06-10 | 2023-11-17 | 腾讯科技(深圳)有限公司 | 行驶轨迹的处理方法、装置及电子设备 |
| CN112487114B (zh) * | 2020-11-10 | 2021-08-31 | 电子科技大学 | 一种城市交叉口地图匹配方法 |
| CN112365088B (zh) * | 2020-11-28 | 2024-04-26 | 北京梧桐车联科技有限责任公司 | 行程关键点的确定方法、装置、设备及可读存储介质 |
| CN112527932B (zh) * | 2020-12-04 | 2023-09-26 | 北京百度网讯科技有限公司 | 道路数据处理的方法、装置、设备及存储介质 |
| CN112907686B (zh) * | 2021-02-09 | 2021-12-14 | 青海师范大学 | 用于矢量轨迹压缩的余弦垂距判别方法、装置和设备 |
| US20220341742A1 (en) * | 2021-04-27 | 2022-10-27 | Via Transportation, Inc. | Systems and methods for route reconstruction |
| CN113157848A (zh) * | 2021-05-06 | 2021-07-23 | 清华大学 | 航路确定方法及装置、电子设备和存储介质 |
| US12572995B2 (en) | 2021-05-07 | 2026-03-10 | Via Transportation, Inc. | Systems and methods for plan determination |
| CN116009523A (zh) * | 2021-10-22 | 2023-04-25 | 苏州艾利特机器人有限公司 | 一种轨迹跟踪方法、装置、设备和存储介质 |
| CN114419186B (zh) * | 2021-12-15 | 2025-04-25 | 武汉中海庭数据技术有限公司 | 一种基于原始轨迹生成道路分歧合流点的方法 |
| CN114925049B (zh) * | 2022-05-10 | 2025-04-18 | 青岛海信网络科技股份有限公司 | 一种轨迹校正方法 |
| KR102907285B1 (ko) * | 2022-07-27 | 2025-12-31 | 홍익대학교 산학협력단 | 지구위치데이터 맵 매칭방법 및 이를 위한 컴퓨팅 장치 |
| CN115439813B (zh) * | 2022-08-04 | 2025-10-31 | 新石器慧通(北京)科技有限公司 | 路沿跟踪方法、装置、计算机可读存储介质及驾驶装置 |
| CN115540879A (zh) * | 2022-09-19 | 2022-12-30 | 深圳依时货拉拉科技有限公司 | 路网匹配方法及装置、计算机设备及可读存储介质 |
| CN115454144B (zh) * | 2022-10-28 | 2023-02-24 | 中国电子科技集团公司第二十八研究所 | 一种动目标飞行轨迹平滑方法及系统 |
| CN116182866B (zh) * | 2023-02-14 | 2026-01-02 | 南京领行科技股份有限公司 | 行驶轨迹的重合检测方法、装置、电子设备及介质 |
| CN116840878A (zh) * | 2023-05-25 | 2023-10-03 | 深圳市正浩创新科技股份有限公司 | 自移动设备的回充方法、自移动设备和可读存储介质 |
| CN116430423B (zh) * | 2023-06-13 | 2023-08-29 | 广州悦跑信息科技有限公司 | 一种运动数据中卫星导航定位轨迹点坐标修正方法 |
| CN118033703B (zh) * | 2024-04-12 | 2024-07-12 | 华能信息技术有限公司 | 一种基于地图融合的无人驾驶矿车定位方法及系统 |
| CN119445001B (zh) * | 2025-01-08 | 2025-04-29 | 北京智网易联科技有限公司 | 基于三维网格的低空航迹处理方法及装置 |
| CN119667734B (zh) * | 2025-02-18 | 2025-08-08 | 杭州智元研究院有限公司 | 一种视频轨迹与gps定位融合应用的行动轨迹复盘方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103037507A (zh) * | 2012-12-17 | 2013-04-10 | 浙江鸿程计算机系统有限公司 | 一种基于Cell-ID定位技术的地图匹配方法 |
| CN104596507A (zh) * | 2015-02-09 | 2015-05-06 | 成都小步创想畅联科技有限公司 | 一种移动终端出行轨迹的确定方法 |
| CN105890599A (zh) * | 2016-04-12 | 2016-08-24 | 上海牵挂网络科技有限公司 | 一种基于地理位置足迹噪点的过滤算法 |
| CN106231671A (zh) * | 2016-08-09 | 2016-12-14 | 南京掌控网络科技有限公司 | 一种移动设备的移动轨迹优化方法 |
| CN106650771A (zh) * | 2016-09-29 | 2017-05-10 | 百度在线网络技术(北京)有限公司 | 基于聚类分析的轨迹去噪方法以及装置 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4348441B2 (ja) * | 2007-01-22 | 2009-10-21 | 国立大学法人 大阪教育大学 | 位置検出装置、位置検出方法、データ判定装置、データ判定方法、コンピュータプログラム及び記憶媒体 |
| US8798902B2 (en) * | 2008-02-05 | 2014-08-05 | General Electric Company | System, method and computer software code for obtaining information for routing a powered system and adjusting a route in accordance with relevant information |
| CN101458434B (zh) * | 2009-01-08 | 2010-09-08 | 浙江大学 | 精确测量和预测乒乓球轨迹系统 |
| US8793090B2 (en) * | 2010-06-23 | 2014-07-29 | Aisin Aw Co., Ltd. | Track information generating device, track information generating method, and computer-readable storage medium |
| WO2014000090A1 (en) * | 2012-06-26 | 2014-01-03 | The Governing Council Of The University Of Toronto | System, method and computer program for dynamic generation of a radio map |
| JP6229655B2 (ja) * | 2013-02-21 | 2017-11-15 | ソニー株式会社 | 情報処理装置、情報処理方法およびプログラム |
| CN105628033B (zh) * | 2016-02-26 | 2019-04-02 | 广西鑫朗通信技术有限公司 | 一种基于道路连通关系的地图匹配方法 |
| CN106483537A (zh) * | 2016-09-22 | 2017-03-08 | 深圳市时代经纬科技有限公司 | 一种卫星定位轨迹的优化方法 |
-
2017
- 2017-07-18 CN CN201710586941.1A patent/CN109269514A/zh active Pending
-
2018
- 2018-07-06 WO PCT/CN2018/094740 patent/WO2019015485A1/zh not_active Ceased
- 2018-07-06 EP EP18834716.5A patent/EP3640596A4/en not_active Withdrawn
-
2020
- 2020-01-17 US US16/746,666 patent/US20200151885A1/en not_active Abandoned
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103037507A (zh) * | 2012-12-17 | 2013-04-10 | 浙江鸿程计算机系统有限公司 | 一种基于Cell-ID定位技术的地图匹配方法 |
| CN104596507A (zh) * | 2015-02-09 | 2015-05-06 | 成都小步创想畅联科技有限公司 | 一种移动终端出行轨迹的确定方法 |
| CN105890599A (zh) * | 2016-04-12 | 2016-08-24 | 上海牵挂网络科技有限公司 | 一种基于地理位置足迹噪点的过滤算法 |
| CN106231671A (zh) * | 2016-08-09 | 2016-12-14 | 南京掌控网络科技有限公司 | 一种移动设备的移动轨迹优化方法 |
| CN106650771A (zh) * | 2016-09-29 | 2017-05-10 | 百度在线网络技术(北京)有限公司 | 基于聚类分析的轨迹去噪方法以及装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3640596A4 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110991525A (zh) * | 2019-11-29 | 2020-04-10 | 西安交通大学 | 基于运营商轨迹数据的伴随模式匹配方法 |
| CN110991525B (zh) * | 2019-11-29 | 2022-08-16 | 西安交通大学 | 基于运营商轨迹数据的伴随模式匹配方法 |
| WO2022134649A1 (zh) * | 2020-12-24 | 2022-06-30 | 南方科技大学 | 城市人流监控方法、装置、电子设备及存储介质 |
| CN113806426A (zh) * | 2021-11-16 | 2021-12-17 | 亿海蓝(北京)数据技术股份公司 | 轨迹数据的处理方法、装置、可读存储介质和电子设备 |
| CN114838735A (zh) * | 2022-03-21 | 2022-08-02 | 福建盛海智能科技有限公司 | 一种基于movebase的路径循迹方法及终端 |
| CN114838735B (zh) * | 2022-03-21 | 2024-05-10 | 江苏盛海智能科技有限公司 | 一种基于movebase的路径循迹方法及终端 |
| WO2025044309A1 (zh) * | 2023-08-25 | 2025-03-06 | 江苏东成工具科技有限公司 | 一种轨迹处理方法、装置和计算机可读存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3640596A4 (en) | 2020-09-16 |
| EP3640596A1 (en) | 2020-04-22 |
| US20200151885A1 (en) | 2020-05-14 |
| CN109269514A (zh) | 2019-01-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2019015485A1 (zh) | 确定运动轨迹的方法和装置 | |
| EP3828501B1 (en) | Method and system for estimating a trajectory from gps data points | |
| CN106875744B (zh) | 周边车辆识别系统及方法 | |
| CN111966776B (zh) | 地图构建方法、装置、电子设备及存储介质 | |
| CN105352520B (zh) | 一种导航路线修正方法和装置 | |
| EP2957869B1 (en) | Method and apparatus for determining reachable area based on road network | |
| JP5675838B2 (ja) | 走行ルートの記述を簡略化するための方法 | |
| TW201011260A (en) | An efficient location referencing method | |
| WO2021236006A1 (en) | Route deviation quantification and vehicular route learning based thereon | |
| EP3624497A1 (en) | Positioning offset correction method and apparatus | |
| US20160161275A1 (en) | Intelligent navigation instruction generator | |
| CN111337039B (zh) | 拥堵路段的地图数据采集方法、装置、系统及存储介质 | |
| CN113587944B (zh) | 准实时的车辆行驶路线生成方法、系统及设备 | |
| CN114664104A (zh) | 一种路网匹配方法和装置 | |
| WO2021238523A1 (zh) | 网络状况提示方法、装置、电子设备及存储介质 | |
| WO2021184320A1 (zh) | 车辆定位方法和装置 | |
| CN112836991A (zh) | 站点规划方法、装置、终端设备和可读存储介质 | |
| US10582341B2 (en) | Facilitating estimation of mobile device presence inside a defined region | |
| WO2018064924A1 (zh) | 基于软输出维特比译码算法sova的译码方法和装置 | |
| CN113837442B (zh) | 校正轨迹震荡路线生成方法、系统、终端设备及存储介质 | |
| CN107018525A (zh) | 定位方法、装置及系统 | |
| CN113282808A (zh) | 轨迹的存储方法、系统及存储介质 | |
| CN108376415A (zh) | 一种轨迹填充的方法及装置 | |
| CN103208189A (zh) | 一种监控道路流量方法及设备 | |
| CN119537654A (zh) | 一种多断点情况下复杂路网拓扑关系自动提取方法及系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18834716 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2018834716 Country of ref document: EP Effective date: 20200113 |