WO2019065299A1 - 情報処理装置および方法 - Google Patents
情報処理装置および方法 Download PDFInfo
- Publication number
- WO2019065299A1 WO2019065299A1 PCT/JP2018/034131 JP2018034131W WO2019065299A1 WO 2019065299 A1 WO2019065299 A1 WO 2019065299A1 JP 2018034131 W JP2018034131 W JP 2018034131W WO 2019065299 A1 WO2019065299 A1 WO 2019065299A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- point
- attribute information
- information
- unit
- processing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images



























Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T9/00—Image coding
- G06T9/001—Model-based coding, e.g. wire frame
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T17/00—Three-dimensional [3D] modelling for computer graphics
- G06T17/10—Constructive solid geometry [CSG] using solid primitives, e.g. cylinders, cubes
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T9/00—Image coding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/124—Quantisation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/597—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding specially adapted for multi-view video sequence encoding
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2210/00—Indexing scheme for image generation or computer graphics
- G06T2210/56—Particle system, point based geometry or rendering
Definitions
- the present disclosure relates to an information processing apparatus and method, and more particularly to an information processing apparatus and method capable of suppressing a reduction in subjective image quality.
- This indication is made in view of such a situation, and enables it to control reduction of a subjective image quality.
- the information processing apparatus is a point to be compared, which is a point to be compared with the current point which is a processing target point of point cloud data whose position information has been updated, from point cloud data before position information is updated.
- the information processing apparatus includes: a search unit searching for a point; and an attribute information setting unit comparing the comparison target point searched by the search unit with the current point to set attribute information of the current point.
- An information processing method is a comparison target that is a point to be compared with a current point that is a processing target point of point cloud data whose position information has been updated from point cloud data before position information is updated. It is an information processing method of searching for a point, comparing the searched comparison target point with the current point, and setting attribute information of the current point.
- the point cloud data before the position information is updated is compared with the current point that is the processing target point of the point cloud data whose position information is updated.
- a certain comparison target point is searched, the searched comparison target point is compared with the current point, and attribute information of the current point is set.
- information can be processed.
- reduction in subjective image quality can be suppressed.
- a three-dimensional structure as shown in A of FIG. 1 is expressed as a set (point group) of a large number of points (point data) as shown in B of FIG. That is, the data of the point cloud is composed of position information and attribute information (for example, color etc.) of each point of this point group. Therefore, while the data structure is relatively simple, an arbitrary three-dimensional structure can be represented with sufficient accuracy by using a sufficiently large number of points.
- a voxel is a data structure for quantizing position information to be encoded.
- a comparison target point which is a point to be compared with the current point which is the point to be processed of the point cloud data whose position information is updated is searched and specified by the search
- the comparison target point and the current point are compared, and attribute information of the current point is set.
- a comparison target point which is a point to be compared with the current point which is a processing target point of the point cloud data whose position information is updated.
- the search unit is provided with an attribute information setting unit that compares the comparison target point searched by the search unit with the current point and sets attribute information of the current point.
- attribute information associated with a change in position information is specified by specifying a comparison target point while considering a change in position information, and setting attribute information of the current point to be processed using the attribute information. It is possible to suppress the change of (color information etc.). Therefore, it is possible to suppress the reduction in PSNR and to suppress the reduction in the subjective image quality (the change in appearance) of the point cloud.
- FIGS. 2 to 4 show how the point changes due to the quantization of the position information.
- a in these figures schematically indicates the point cloud before quantization.
- B in these figures schematically shows the point cloud after quantization.
- Each arrow of AtoB indicates the correspondence between a point before quantization and a point after quantization when using after quantization as a reference, and each arrow of BtoA is the reverse, that is, before quantization Shows the correspondence between the point before quantization and the point after quantization.
- FIG. 2 shows an example where the position and the number of points do not substantially change due to quantization.
- the comparison target for the point 13 after quantization is the point 11 before quantization located at substantially the same position as the point 13 (the point 13 after quantization is the point before quantization Corresponding to 11).
- the comparison target for the point 11 before quantization is the point 13 after quantization which is located substantially at the same position as the point 11 (the point 11 before quantization is the point 13 after quantization) Correspond to
- the comparison target for the point 14 after quantization is the point 12 before quantization which is located substantially at the same position as the point 14
- the comparison target for the point 12 before quantization is The object is a point 14 after quantization which is located substantially at the same position as the point 12.
- FIG. 3 shows an example where the number of points is reduced by quantization.
- the comparison targets for the point 23 after quantization are the points 21 and 22 before quantization (the points 23 after quantization correspond to the points 21 and 22 before quantization) To do).
- the comparison target for the point 21 before quantization is the point 23 after quantization located at substantially the same position as the point 21 (the point 21 before quantization is the point 23 after quantization) Correspond to
- the attribute information (i ') of the point 23 is a value generated using the attribute information (i) of the point 21 and the attribute information (j) of the point 22, or the attribute information (i) of the point 21 Approximately the same value is set.
- FIG. 4 shows an example where the number of points is increased by quantization or the position of the points is shifted.
- the comparison target for the point 33 after quantization is the point 32 before quantization (the point 33 after quantization corresponds to the point 32 before quantization).
- the comparison object for the point 31 before quantization is the point 34 after quantization (the point 31 before quantization corresponds to the point 34 after quantization).
- attribute information can be set to each point so as to suppress a reduction in the subjective image quality of the point cloud by searching for a comparison target in consideration of a change in position.
- point cloud as data to be processed
- present technology is not limited to point cloud, but indicates a three-dimensional structure such as mesh, and can set attribute information.
- Data can be applied to any processing object. Further, this processing target may be a moving image or a still image.
- FIG. 5 is a block diagram illustrating an exemplary main configuration of a coding device which is an embodiment of an information processing device to which the present technology is applied.
- the coding apparatus 100 shown in FIG. 5 codes point cloud data input as a coding target using voxels, and outputs the obtained coded data and the like. At this time, the encoding apparatus 100 performs this encoding in a method to which the present technology is applied as described below.
- the encoding device 100 includes a control unit 101, a preprocessing unit 111, a bounding box setting unit 112, a voxel setting unit 113, a signal sequence generation unit 114, and an encoding unit 115.
- the control unit 101 performs processing related to control of each processing unit in the encoding device 100. For example, the control unit 101 controls execution or skip (omission) of processing by each processing unit. For example, the control unit 101 performs such control based on predetermined control information. By doing this, the control unit 101 can suppress the execution of unnecessary processing, and can suppress an increase in load.
- the control unit 101 may have any configuration.
- the control unit 101 includes a central processing unit (CPU), a read only memory (ROM), a random access memory (RAM), and the like.
- the processing may be performed by loading a stored program or data into the RAM and executing it.
- the preprocessing unit 111 performs predetermined processing as preprocessing on an encoding target (data of point cloud) which is controlled by the control unit 101 and input to the encoding apparatus 100, and the processed data is bounded box
- the setting unit 112 is supplied.
- control unit 101 causes the preprocessing unit 111 to execute preprocessing when the execution of preprocessing is permitted (not prohibited) according to control information that permits or prohibits the execution of preprocessing. Also, for example, the control unit 101 is permitted (not prohibited) to execute the preprocessing according to the control information indicating the range of the encoding target to be the target of permission or prohibition of the execution of the preprocessing. Then, the pre-processing unit 111 executes the pre-processing. Furthermore, for example, the control unit 101 causes the pre-processing unit 111 to execute the process of which the execution is permitted (not prohibited) according to the control information specifying the process content for permitting or prohibiting the execution. By doing this, the execution of unnecessary pre-processing can be suppressed, and an increase in load can be suppressed.
- the preprocessing unit 111 may perform processing for reducing noise as preprocessing, or may perform processing for changing the resolution (the number of points). Also, for example, the arrangement of each point may be updated so as to equalize the density of the point group or give a desired bias.
- non-point cloud data such as image information having depth information is input to the encoding apparatus 100, and the preprocessing unit 111 converts the input data into point cloud data as pre-processing. It may be converted.
- the pre-processing unit 111 may have any configuration, for example, the pre-processing unit 111 has a CPU, a ROM, a RAM, etc., and the CPU loads programs and data stored in the ROM etc. into the RAM and executes them. Pre-processing may be performed by performing the processing.
- the bounding box setting unit 112 is controlled by the control unit 101, and performs processing relating to setting of the bounding box for normalizing position information to be encoded.
- the control unit 101 sets the bounding box in the bounding box setting unit 112.
- the control unit 101 is permitted (not prohibited) to set the bounding box.
- the bounding box setting unit 112 sets the bounding box for the target.
- the control unit 101 causes the bounding box setting unit 112 to use bound (not prohibited) parameters according to control information on permission or prohibition of parameters used for setting the bounding box. To set By doing this, it is possible to suppress the setting of unnecessary bounding boxes and the use of unnecessary parameters, and it is possible to suppress an increase in load.
- the bounding box setting unit 112 sets a bounding box for each object to be encoded. For example, as shown in A of FIG. 6, when the object 131 and the object 132 are represented by data of point cloud, the bounding box setting unit 112, as shown in B of FIG. The bounding box 141 and the bounding box 142 are set to include the objects 132 respectively.
- the bounding box setting unit 112 supplies the voxel setting unit 113 with information on the bounding box.
- the bounding box setting unit 112 may have any configuration.
- the CPU has a CPU, a ROM, a RAM, etc., and the CPU loads a program or data stored in the ROM or the like into the RAM.
- the processing related to the setting of the bounding box may be performed by executing the processing.
- the voxel setting unit 113 is controlled by the control unit 101 to perform processing regarding setting of voxels for quantizing position information to be encoded.
- the control unit 101 when the setting of the voxel is permitted (not prohibited) according to the control information for permitting or prohibiting the setting of the voxel, the control unit 101 causes the voxel setting unit 113 to set the voxel. Also, for example, according to the control information indicating the range of the encoding target to be the target of permission or prohibition of the setting of the voxel, the control unit 101 is permitted (not prohibited) to be encoded for the setting of the voxel On the other hand, the voxel setting unit 113 sets the voxel.
- control unit 101 causes the voxel setting unit 113 to set the voxel using the permitted (not prohibited) parameter according to the control information on permission or prohibition of the parameter used for setting the voxel. .
- unnecessary setting of voxels and use of unnecessary parameters can be suppressed, and an increase in load can be suppressed.
- the voxel setting unit 113 sets a voxel in the bounding box set by the bounding box setting unit 112. For example, as illustrated in C of FIG. 6, the voxel setting unit 113 divides the bounding box 141 to set the voxel 151. That is, the voxel setting unit 113 quantizes (that is, voxels) point cloud data in the bounding box with voxels. When there are a plurality of bounding boxes, the voxel setting unit 113 voxels point cloud data for each bounding box. That is, in the case of the example of FIG. 6B, the voxel setting unit 113 performs the same process on the bounding box 142.
- the voxel setting unit 113 sets the voxelized point cloud data (also referred to as voxel data) (information on data structure for quantizing position information), attribute information, etc. Are supplied to the signal string generation unit 114.
- the voxel setting unit 113 may have any configuration.
- the voxel setting unit 113 includes a CPU, a ROM, a RAM, and the like, and the CPU loads programs and data stored in the ROM and the like into the RAM.
- the processing related to the setting of the voxel may be performed by executing the processing.
- the signal string generation unit 114 is controlled by the control unit 101 and performs processing regarding generation of a signal string.
- control unit 101 causes the signal sequence generation unit 114 to generate a signal sequence when the generation of the signal sequence is permitted (not prohibited) according to the control information which permits or prohibits the generation of the signal sequence. Also, for example, the control unit 101 is permitted (not prohibited) to generate a signal sequence according to control information indicating a range to be encoded that is a target of permission or prohibition of generation of a signal sequence. Signal sequence generator 114 generates a signal sequence. By doing this, it is possible to suppress the generation of an unnecessary signal sequence and to suppress an increase in load.
- the signal sequence generation unit 114 converts, for example, voxel data obtained by quantizing point cloud data (for example, voxel data generated by the voxel setting unit 113 as shown in C of FIG. 6) and other information into a signal sequence.
- the signal sequence is supplied to the encoding unit 115.
- the signal string generation unit 114 may have any configuration, but for example, the CPU has a ROM, a RAM, etc., and the CPU loads programs and data stored in the ROM etc. into the RAM.
- the processing related to the generation of the signal sequence may be performed by executing the processing.
- the encoding unit 115 is controlled by the control unit 101, and performs processing relating to encoding of the supplied signal sequence.
- control unit 101 encodes the signal sequence to the encoding unit 115 when the encoding of the signal sequence is permitted (not prohibited) according to the control information for permitting or prohibiting the encoding of the signal sequence.
- control unit 101 is allowed (not prohibited) to code the signal sequence according to the control information indicating the range of the coding target to be the target of permission or prohibition of the signal sequence coding.
- the encoding unit 115 encodes a signal sequence for the encoding target. By doing this, it is possible to suppress the coding of unnecessary signal sequences and to suppress an increase in load.
- the encoding unit 115 encodes the supplied signal sequence to generate encoded data (bit stream).
- the coding method of this signal sequence is arbitrary.
- the encoding unit 115 may encode the signal sequence by variable length coding (VLC (Variable Length Code)).
- VLC Variable Length Code
- the encoding unit 115 appropriately encodes related information other than point cloud data, such as control information, and stores the related information in a header, a parameter set, or the like.
- the encoding unit 115 associates the bit stream of the various information described above with each other.
- the term "associate" means, for example, that one data can be processed (linked) in processing the other data. That is, the data associated with each other may be collected as one data or may be individual data. For example, control information associated with coded data may be transmitted on a transmission path different from that of the coded data. Also, for example, control information associated with encoded data may be recorded on a recording medium (or another recording area of the same recording medium) other than the encoded data. Note that this “association” may not be the entire data but a part of the data. For example, they may be associated with one another in arbitrary units such as a plurality of frames, one frame, or a part in a frame.
- Encoding section 115 outputs the encoded data (bit stream) obtained by such encoding to the outside of encoding apparatus 100.
- the data (coded data and control information) output from the coding apparatus 100 may be decoded by, for example, a processing unit at a later stage (not shown) to restore point cloud data. It may be transmitted by the communication unit and transmitted to another apparatus such as a decoding apparatus via a predetermined transmission path, or may be recorded on a recording medium (not shown).
- the encoding unit 115 may have any configuration.
- the encoding unit 115 includes a CPU, a ROM, a RAM, and the like, and the CPU loads programs and data stored in the ROM and the like into the RAM.
- the processing related to encoding may be performed by executing the processing.
- FIG. 7 is a block diagram showing a main configuration example of the encoding unit 115 (FIG. 5). As shown in FIG. 7, the encoding unit 115 includes a geometric information encoding unit 201, an attribute information updating unit 202, an attribute information encoding unit 203, and a combining unit 204.
- the geometry information encoding unit 201 performs processing regarding encoding of geometry information (Geometry information) such as position information.
- geometry information such as position information.
- the geometry information encoding unit 201 encodes a signal sequence of geometry information (voxel data) supplied from the signal sequence generation unit 114, and generates a bitstream thereof.
- the geometry information encoding unit 201 supplies the bit stream to the combining unit 204.
- the geometry information encoding unit 201 may have any configuration, for example, it has a CPU, a ROM, a RAM, etc., and the CPU stores programs and data stored in the ROM etc. as a RAM. May be loaded and executed to perform processing related to encoding of geometrical information.
- the attribute information update unit 202 performs a process related to update of attribute information. For example, the attribute information update unit 202 updates the attribute information of each point (each voxel) so as to correspond to the quantization of the position information.
- the attribute information includes, for example, at least one of color information, an ⁇ channel, and a normal vector.
- the attribute information update unit 202 acquires point cloud data (that is, data before quantization) including geometry information and attribute information from the preprocessing unit 111 (FIG. 5). Also, the attribute information update unit 202 acquires a signal sequence of voxel data (that is, data after quantization) from the signal sequence generation unit 114. The attribute information update unit 202 sets, for each point (voxel), a comparison target point to be compared so as to correspond to a change in position information due to quantization based on the information. Then, the attribute information update unit 202 sets the attribute information of each point using the attribute information of the comparison target point. The attribute information update unit 202 supplies the attribute information (update attribute information) thus updated to the attribute information encoding unit 203.
- point cloud data that is, data before quantization
- a signal sequence of voxel data that is, data after quantization
- the attribute information update unit 202 sets, for each point (voxel), a comparison target point to be compared so as to correspond to a
- the attribute information updating unit 202 may have any configuration, but for example, the CPU has a ROM, a RAM, etc., and the CPU loads programs and data stored in the ROM etc. into the RAM.
- the processing related to updating of the attribute information may be performed by executing the processing.
- the attribute information encoding unit 203 performs processing related to encoding of attribute information. For example, the attribute information encoding unit 203 encodes update attribute information, which is attribute information updated by the attribute information updating unit 202, and generates the bit stream. The attribute information encoding unit 203 supplies the bit stream to the combining unit 204.
- the attribute information encoding unit 203 may have any configuration, but for example, the CPU has a ROM, a RAM, etc., and the CPU stores programs and data stored in the ROM etc. in the RAM. By loading and executing, processing concerning encoding of attribute information may be performed.
- the combining unit 204 performs processing on combining of bit streams. For example, the combining unit 204 combines the bit stream of the geometry information supplied from the geometry information coding unit 201 and the bit stream of the attribute information supplied from the attribute information coding unit 203, and one bit is generated. Put together in a stream. Note that this bit stream may include metadata such as a header and a parameter set. The combining unit 204 outputs the bit stream to the outside of the encoding device 100.
- composition unit 204 may have any configuration, for example, the composition unit 204 includes a CPU, a ROM, a RAM, and the like, and the CPU loads programs and data stored in the ROM and the like into the RAM. By executing the process, processing relating to bit stream composition may be performed.
- FIG. 8 is a block diagram showing an example of the main configuration of the attribute information update unit 202 (FIG. 7).
- the attribute information update unit 202 includes a control unit 211, a comparison target search unit 221, an attribute information setting unit 222, and an exception processing unit 223.
- the control unit 211 controls the operation of each processing unit of the comparison target search unit 221 to the exception processing unit 223. For example, the control unit 211 performs each process performed by the comparison target search unit 221 to the exception processing unit 223 based on information related to processing such as processing conditions (request from the outside) and processing modes and parameters used for processing. Set the method etc.
- control unit 211 performs this setting based on information such as processing speed, quality, compression algorithm, and the like.
- the control unit 211 sets a comparison target determination method, controls the comparison target search unit 221, and determines the comparison target by the method.
- the control unit 211 sets a comparison method, controls the attribute information setting unit 222, and causes the method to compare attribute information.
- the control unit 211 sets an attribute determination method, controls the attribute information setting unit 222, and causes the method to determine an attribute.
- control unit 211 sets an exception handling method, controls the exception handling unit 223, and causes the exception handling to be performed by that method.
- the control unit 211 may have any configuration.
- the control unit 211 includes a CPU, a ROM, a RAM, and the like, and the CPU loads programs and data stored in the ROM and the like into the RAM. By performing the process, a process related to control may be performed.
- the comparison target search unit 221 acquires geometry information before quantization (geometry information before position change) and geometry information after quantization (voxel (Voxel) data), and uses them to obtain the control unit 211. Search for comparison points to be compared with the current point according to the set method. When the comparison target point is specified, the comparison target search unit 221 supplies the comparison information, which is information on the comparison target point, to the attribute information setting unit 222.
- comparison target search unit 221 may have any configuration, for example, it has a CPU, a ROM, a RAM, and the like, and the CPU loads programs and data stored in the ROM and the like into the RAM.
- the processing related to the search for the comparison target point may be performed by executing the processing.
- the attribute information setting unit 222 acquires attribute information before quantization (attribute information before position change) in addition to the comparison target information. Using the information, the attribute information setting unit 222 compares the current point with the comparison target point in the method set by the control unit 211. Further, the attribute information setting unit 222 determines the attribute of the current point by the method set by the control unit 211 using the attribute information of the comparison target point, sets the attribute information, and reflects the attribute. The attribute information setting unit 222 supplies the exception processing unit 223 with the attribute information (attribute information after position change) of the set current point.
- the attribute information includes at least one of color information, an alpha channel, and a normal vector.
- the attribute information setting unit 222 may have any configuration.
- the attribute information setting unit 222 includes a CPU, a ROM, a RAM, and the like, and the CPU loads programs and data stored in the ROM and the like into the RAM.
- the processing related to the setting of the attribute information may be performed by executing the processing.
- the exception processing unit 223 performs exception processing by the method set by the control unit 211 when the comparison target point is not found. Details of exception handling will be described later.
- the exception processing unit 223 supplies the attribute information after position change supplied from the attribute information setting unit 222 as update attribute information to the attribute information encoding unit 203 (FIG. 7) when exception processing is not performed.
- the exception processing unit 223 may have any configuration.
- the exception processing unit 223 has a CPU, a ROM, a RAM, and the like, and the CPU loads programs and data stored in the ROM and the like into the RAM. Processing related to exception processing may be performed by executing the processing.
- FIG. 9 is a block diagram showing an example of the main configuration of the control unit 211 (FIG. 8).
- the control unit 211 includes, for example, a comparison method setting unit 231, a comparison target determination method setting unit 232, an attribute determination method setting unit 233, and an exception handling method setting unit 234.
- the comparison method setting unit 231 performs processing related to setting of the comparison method.
- the comparison method is arbitrary, for example, as shown in B of FIG. 10, the method of determining the color from the relationship of AtoB, the method of determining the color from the relationship of BtoA, and the relationship from the relationship of both AtoB and BtoA A method to decide is prepared as a candidate, and the comparison method setting unit 231 selects any one of these methods.
- the comparison method setting unit 231 selects one of these methods based on various conditions (for example, processing speed, quality, compression algorithm, and the like).
- the attribute information setting unit 222 uses the attribute information of the points 253 and 252 which are comparison target points The attribute information of the point 251 which is a point is set.
- the attribute information setting unit 222 uses the attribute information of the point 253 as the comparison target point to set the current point The attribute information of the point 251 which is
- the attribute information setting unit 222 sets the attribute information of the points 252 and 253 or The attribute information of the point 251 which is the current point is set using the attribute information.
- the comparison method setting unit 231 may have any configuration.
- the comparison method setting unit 231 includes a CPU, a ROM, a RAM, and the like, and the CPU loads programs and data stored in the ROM and the like into the RAM.
- the process related to the setting of the comparison method may be performed by executing the process.
- the comparison target determination method setting unit 232 performs processing relating to setting of a comparison target determination method.
- the determination method of the comparison target is arbitrary, but may be, for example, a method of selecting, as the comparison target point, the point closest to the current point in the point cloud data before the position information is updated. .
- the comparison target search unit 221 is located closer to the point 252 and the point 253 located near the point 251 which is the current point Select a point (located nearby) as the comparison target point.
- the point cloud data located before the predetermined distance r with respect to the current point of the point cloud data before the position information is updated, and the point located closest to the current point is selected as the comparison target point. It may be.
- the comparison target search unit 221 sets a circle 254 of a radius r centered on the point 251 which is the current point, and locates the inside of the circle 254. Of the points 252 and 253, the point located closer (closest) is selected as the comparison target point. In this case, since the maximum value r of the distance between the current point and the comparison target point is set, the comparison target point may not exist. In that case, the exception handling unit 223 performs exception handling.
- Other algorithms are optional, but may be an algorithm that adapts to a subjective structure to determine comparison targets, such as, for example, reducing errors in edge portions.
- the comparison target search unit 221 sets a circle 254 of a radius r centered on the point 251 which is the current point, and locates the inside of the circle 254.
- a point selected according to another algorithm is selected as a point to be compared.
- a plurality of methods such as these are prepared as candidates, and the comparison object determination method setting unit 232 selects one of these methods.
- the comparison target determination method setting unit 232 selects any one of these methods based on various conditions (for example, processing speed, quality, compression algorithm, and the like).
- the comparison target determination method setting unit 232 may have any configuration, for example, it has a CPU, a ROM, a RAM, etc., and the CPU stores programs and data stored in the ROM etc. By loading and executing it, processing concerning setting of the determination method of the comparison target may be performed.
- the attribute determination method setting unit 233 performs processing relating to setting of the attribute determination method.
- the method of determining the attribute is arbitrary, for example, one of the attributes of the comparison target point may be selected and applied to the attribute of the current point.
- the attribute information setting unit 222 sets one of the attribute information of the point 252 and the point 253 which are the comparison target points to the point 251 which is the current point.
- the average of the attributes of the plurality of comparison target points may be applied to the attribute of the current point.
- the attribute information setting unit 222 applies the average of the attribute information of both points 252 and 253, which are comparison points, to the point 251, which is the current point. .
- the attribute of each comparison target point may be weighted, and the average (weighted average) may be applied to the attribute of the current point.
- the attribute information setting unit 222 applies the weighted average of the attribute information of both the point 252 and the point 253 which are the comparison target to the point 251 which is the current point. Do.
- the weight (coefficient) may be set, for example, according to the distance from the comparison target point to the current point, the feature (for example, brightness) of the attribute information of the comparison target point, and the like.
- a plurality of methods such as these are prepared as candidates, and the attribute determination method setting unit 233 selects one of these methods.
- the attribute determination method setting unit 233 selects one of these methods based on various conditions (for example, processing speed, quality, compression algorithm, and the like).
- the attribute determination method setting unit 233 may have any configuration.
- the attribute determination method setting unit 233 includes a CPU, a ROM, a RAM, and the like, and the CPU stores programs and data stored in the ROM and the like in the RAM. By loading and executing, processing regarding setting of a method of determining an attribute may be performed.
- the exception handling method setting unit 234 performs processing relating to setting of the exception handling method.
- the exception processing method is optional, but, for example, the current point having no comparison target point may be made invisible.
- the exception processing unit 223 assigns an invisible attribute (no_color_attribute) to a current point having no comparison target point (sets a bit or defines an invisible color in a header or the like, Set the color).
- the exception processing unit 223 supplies the attribute information encoding unit 203 with the attribute information to which the invisible attribute is added as update attribute information.
- a current point having no comparison target point may be excluded from the target of encoding.
- the encoding apparatus 100 encodes the point cloud from which the point for which the comparison target point is not found is excluded.
- the encoding method (for example, the mode, the parameter, and the like) may be changed so that a current point having no comparison target point is not generated.
- the exception processing unit 223 requests, for example, the pre-processing unit 111 or the like to re-encode the point cloud. At that time, the exception processing unit 223 changes the encoding method and requests re-encoding.
- the change of the encoding method may be any.
- the threshold DAG TH used for DAG (Directed Acyclic Graph) (also referred to as effective directivity graph) may be changed.
- a plurality of methods such as these are prepared as candidates, and the exception processing method setting unit 234 selects one of these methods.
- the exception handling method setting unit 234 selects any one of these methods based on various conditions (for example, processing speed, quality, compression algorithm, etc.).
- the exception handling method setting unit 234 may have any configuration.
- the exception processing method setting unit 234 includes a CPU, a ROM, a RAM, and the like, and the CPU stores programs and data stored in the ROM and the like in the RAM. By loading and executing, processing relating to setting of a method of exception handling may be performed.
- the encoding apparatus 100 can set attribute information to each point so as to suppress the reduction in the subjective image quality of the point cloud by searching for the comparison target in consideration of the change in the position.
- the comparison method setting unit 231 to the exception processing method setting unit 234 of the control unit 211 are used as in the table shown in A of FIG.
- the method of each process may be set according to (high speed, high quality (focus on objective index), high quality (focus on subjective index), etc.).
- the comparison method setting unit 231 to the exception processing method setting unit 234 of the control unit 211 use the application (high speed, as shown in the table of FIG.
- the method of each processing may be set according to high quality (focus on objective index), high quality (focus on subjective index), and the like.
- the encoding device 100 can suppress an increase in unnecessary processing load and processing time.
- the preprocessing unit 111 preprocesses the input data in step S101.
- step S102 the bounding box setting unit 112 sets a bounding box for the preprocessed data.
- step S103 the voxel setting unit 113 sets a voxel in the bounding box set in step S102.
- step S104 the signal sequence generator 114 generates a signal sequence based on the data structure.
- step S105 the encoding unit 115 encodes the signal sequence generated by the process of step S104.
- step S106 the encoding unit 115 outputs the bit stream obtained by the encoding to the outside of the encoding apparatus 100.
- This bit stream is, for example, transmitted to the decoding side (decoding device etc.) or recorded on a recording medium.
- step S106 ends, the encoding process ends.
- the encoding target is a moving image
- this series of processing is performed for each frame.
- the geometric information encoding unit 201 encodes voxel data in step S121.
- step S122 the attribute information update unit 202 updates the attribute information.
- step S123 the attribute information encoding unit 203 encodes the attribute information updated in step S122.
- step S124 the combining unit 204 combines the bit stream obtained by the process of step S121 and the bit stream obtained by the process of step S123.
- step S124 ends, the signal sequence encoding process ends, and the process returns to FIG.
- control unit 211 When the attribute information update process is started, the control unit 211 performs control process in step S141 to determine the method of each process.
- step S142 the comparison target search unit 221 searches for comparison target points in accordance with the comparison target determination method set in step S141.
- step S143 the attribute information setting unit 222 determines whether to set attribute information at the current point. If it is determined that the attribute information is to be set, the process proceeds to step S144.
- step S144 the attribute information setting unit 222 sets the attribute information of the current point according to the comparison method and the attribute determination method set in step S141.
- step S144 When the process of step S144 ends, the process proceeds to step S145. Further, in step S143, for example, when it is determined that the comparison target point is not found and the attribute information is not set to the current point, the processing proceeds to step S145.
- step S145 the exception processing unit 223 determines whether to perform exception processing. For example, when it is determined that the comparison target point is not found and the exception processing is performed, the processing proceeds to step S146.
- step S146 the exception processing unit 223 performs exception processing in accordance with the exception processing method set in step S141.
- step S146 When the process of step S146 ends, the attribute information update process ends, and the process returns to FIG. Further, in step S145, for example, if the comparison target point is found and it is determined that the exception processing is not performed, the processing of step S146 is omitted, the attribute information update processing ends, and the processing returns to FIG.
- the comparison method setting unit 231 sets the comparison method in step S161 and supplies the setting to the attribute information setting unit 222.
- step S162 the comparison target determination method setting unit 232 sets the comparison target determination method, and supplies the setting to the comparison target search unit 221.
- step S163 the attribute determination method setting unit 233 sets the attribute determination method, and supplies the setting to the attribute information setting unit 222.
- step S164 the exception handling method setting unit 234 sets the exception handling method, and supplies the setting to the exception handling unit 223.
- step S164 ends, the control process ends.
- the encoding device 100 can suppress an increase in unnecessary processing load and processing time.
- a of FIG. 16 compares the value of PSNR of each method with respect to each component of YUV
- B of FIG. 16 is a bar graph of it.
- the white bar graph in FIG. 16B corresponds to Dag ORG in the table in FIG. 16A
- the hatched bar graph in B in FIG. 16 corresponds to Dag BtoA in the table in FIG.
- the meshed bar graph corresponds to Dag New in the table of FIG.
- the present technology can be applied to improve PSNR by searching for comparison targets in consideration of changes in position. Therefore, it is possible to suppress the reduction of the subjective image quality of the point cloud.
- ⁇ Decoding device The decoding device that decodes the bit stream generated by the encoding device 100 decodes the attribute information as well as the geometrical information. Also, when the invisible attribute (no_color_attribute) is set for the point, the decoding device performs processing to make the point invisible.
- FIG. 17 is a block diagram illustrating an exemplary main configuration of a decoding device which is an embodiment of an information processing device to which the present technology is applied.
- the decoding device 300 shown in FIG. 17 is a decoding device corresponding to the coding device 100 of FIG. 5, for example, decodes point cloud coding data generated by the coding device 100 and outputs point cloud data. Restore.
- the decoding device 300 includes a decoding unit 301, a voxel data generation unit 302, and a point cloud processing unit 303.
- the decoding unit 301 performs processing related to decoding of a bitstream. For example, the decoding unit 301 decodes a bitstream by a decoding method corresponding to the encoding method of the encoding unit 115, and extracts a signal sequence of geometry information and attribute information from the bitstream. The decoding unit 301 supplies the signal sequence extracted from the bit stream to the voxel data generation unit 302.
- the decryption unit 301 may have any configuration, for example, the decryption unit 301 has a CPU, a ROM, a RAM, etc., and the CPU loads programs and data stored in the ROM etc. into the RAM. Processing may be performed on decoding by executing the process.
- the voxel data generation unit 302 performs processing related to generation of voxel data. For example, the voxel data generation unit 302 generates voxel data corresponding to the signal sequence supplied from the decoding unit 301. The voxel data generation unit 302 supplies the generated voxel data to the point cloud processing unit 303.
- the voxel data generation unit 302 may have any configuration.
- the voxel data generation unit 302 includes a CPU, a ROM, a RAM, and the like, and the CPU loads programs and data stored in the ROM and the like into the RAM.
- the processing related to the generation of voxel data may be performed by executing the processing.
- the point clouding processing unit 303 performs processing on restoration of point cloud data. For example, the point cloud processing unit 303 converts the supplied voxel data into point cloud data (generates decoded point cloud data). Note that the point clouding processing unit 303 may further convert the decoded point cloud data into mesh data.
- the point clouding processing unit 303 outputs the generated decryption point cloud data (or mesh data) to the outside of the decryption apparatus 300.
- the output decoding point cloud data (or Mesh data) may be subjected to image processing by, for example, a processing unit at a later stage (not shown) and displayed on a monitor as image information, or a communication unit (not shown). And may be transmitted to another apparatus via a predetermined transmission path, or may be recorded on a recording medium (not shown).
- the point cloud processing unit 303 may have any configuration, for example, it has a CPU, a ROM, a RAM, and the like, and the CPU stores programs and data stored in the ROM and the like in the RAM. By loading and executing, processing relating to restoration of point cloud data may be performed.
- the decoding device 300 can correctly decode the bitstream generated by the encoding device 100. Therefore, the decoding device 300 can realize suppression of reduction in subjective image quality.
- FIG. 18 is a block diagram showing a main configuration example of the decoding unit 301. As shown in FIG. As illustrated in FIG. 18, the decoding unit 301 includes a geometry information decoding unit 321, an attribute information decoding unit 322, and an invisible processing unit 323.
- the geometry information decoding unit 321 decodes the supplied bit stream to extract a signal sequence of geometry information.
- the geometry information decoding unit 321 supplies the signal sequence of the extracted geometry information to the voxel data generation unit 302 (FIG. 17).
- the geometry information decoding unit 321 may have any configuration, but for example, it has a CPU, a ROM, a RAM, etc., and the CPU stores programs and data stored in the ROM etc. in the RAM. Processing concerning decoding of geometrical information may be performed by loading and executing.
- the attribute information decoding unit 322 decodes the supplied bit stream, and extracts a signal sequence of attribute information (updated attribute information).
- the attribute information decoding unit 322 supplies the signal sequence of the extracted attribute information (updated attribute information) to the invisible processing unit 323.
- the attribute information decoding unit 322 may have any configuration, but for example, the CPU has a ROM, a RAM, etc., and the CPU loads programs and data stored in the ROM etc. into the RAM. A process related to decoding of attribute information may be performed by executing the process.
- the invisible processing unit 323 performs invisible processing to make the point to which the invisible attribute (no_color_attribute) is given invisible by using the signal sequence of the supplied attribute information (update attribute information).
- the invisible processing unit 323 supplies a signal sequence of attribute information (updated attribute information) appropriately subjected to the invisible processing to the voxel data generation unit 302 (FIG. 17).
- the invisible processing unit 323 may have any configuration.
- the invisible processing unit 323 has a CPU, a ROM, a RAM, etc., and the CPU loads programs and data stored in the ROM etc. into the RAM.
- the processing related to the invisible may be performed by executing it.
- the decoding device 300 can correctly decode the bit stream generated by the coding device 100. Therefore, the decoding device 300 can realize the suppression of the reduction in the subjective image quality of the point cloud.
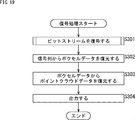
- step S301 the decoding unit 301 decodes the bit stream and extracts a signal sequence.
- step S302 the voxel data generation unit 302 restores voxel data from the signal sequence extracted in step S301.
- step S303 the point cloud processing unit 303 restores point cloud data from the voxel data obtained by the process of step S302.
- step S304 the point clouding processing unit 303 outputs the restored point cloud data (decryption point cloud data) to the outside of the decryption apparatus 300.
- step S304 ends, the decoding process ends.
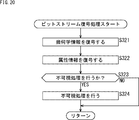
- the geometry information decoding unit 321 decodes the geometry information bitstream in step S321.
- step S322 the attribute information decoding unit 322 decodes the bit stream of the attribute information.
- step S323 the invisible processing unit 323 determines whether to perform invisible processing. If it is determined that the point to which the invisible attribute is assigned is present and the invisible process is to be performed on the point, the process proceeds to step S324.
- step S324 the invisible processing unit 323 performs invisible processing on the point to which the invisible attribute is assigned.
- step S324 When the process of step S324 ends, the bitstream decoding process ends, and the process returns to FIG. If it is determined in step S323 that the invisible process is not to be performed, the process of step S324 is omitted, the bitstream decoding process ends, and the process returns to FIG.
- the decoding device 300 can realize the suppression of the reduction in the subjective image quality of the point cloud.
- both the point 412 and the point 413 are set as the comparison target points with respect to the point 411 which is the current point in the voxel 410, both the point 412 and the point 413
- the attribute information of may be set to the point 411.
- each of a plurality of pieces of attribute information may be set in directions different from each other as viewed from the current point.
- the attribute information to be applied may be changed according to the direction (viewpoint direction) of accessing the current point.
- the direction in which each attribute information is applied in other words, the direction in which the applied attribute information is switched.
- the number of pieces of attribute information for example, the number of colors
- the number of pieces of attribute information may be specified. For example, as shown in FIG. 22, even if information (num_of_color_attribute) indicating the number of attribute information that can be set to the current point, and information (arrangement_type) indicating the direction (axis) to switch attribute information are set. Good.
- a of FIG. 22 is an example in the case of setting two pieces of attribute information at the current point. As shown in A of FIG. 22, although the number of pieces of attribute information is the same, the direction in which the attribute information is assigned changes according to the value of arrangement_type.
- B of FIG. 22 is an example in the case of setting many attribute information by a current point. As shown in B of FIG. 22, the number of pieces of attribute information set to the current point changes according to the value of num_of_color_attribute. And the direction to which each attribute information is allocated also changes according to the number of the attribute information.
- attribute information may be switched at the boundary, and attribute information on both sides of the boundary may be mixed (blended) near the boundary.
- attribute information on both sides of the boundary may be mixed (blended) near the boundary.
- the color may gradually change as the viewpoint direction changes.
- the division method of the direction which allocates attribute information is arbitrary, and is not limited to the above-mentioned example.
- it may be divided in the latitude direction and the longitude direction. That is, information indicating the number of divisions in the latitudinal direction (num_of_color_attribute_split_latitude (n_lat)) and information indicating the number of divisions in the longitudinal direction (num_of_color_attribute_split_longitude (n_long)) may be set as the attribute information allocation direction.
- a of FIG. 23 shows an example of division in the latitude direction.
- B of FIG. 23 shows an example of division in the longitudinal direction.
- the division number in the latitude direction and the division number in the longitude direction may be set independently of each other.
- identification information (#) may be provided in which the values of these two parameters are collectively set.
- attribute information may be allocated in the same manner as in the case of assigning one piece of attribute information described above to each direction to which attribute information of the current point can be assigned.
- attribute information of the points 412 and 413 are based on the point 411. , Located in different directions. Therefore, in this case, the attribute information of the point 412 is assigned to the direction on the point 412 side of the point 411 in the same manner as in the case of assigning one attribute information described above.
- the attribute information of the point 413 may be assigned in the same manner as in the case of assigning one attribute information described above.
- the attribute information update unit 202 has the same configuration as that in the case of FIG. An example of the flow of the attribute information update process in this case will be described with reference to the flowchart of FIG.
- control unit 211 When the attribute information update process is started, the control unit 211 performs control process in step S401 to determine the method of each process. This control process is the same as that in the case of FIG.
- step S402 the comparison target search unit 221 searches for comparison target points according to the comparison target determination method set in step S401.
- step S403 the control unit 211 sets a processing target angle, that is, a direction (current direction) in which attribute information of the current point is set.
- step S404 the attribute information setting unit 222 determines whether to set attribute information in the current direction of the current point. If it is determined that the attribute information is to be set, the process proceeds to step S405.
- step S405 the attribute information setting unit 222 sets attribute information in the current direction of the current point in accordance with the comparison method and the attribute determination method set in step S401.
- step S405 When the process of step S405 ends, the process proceeds to step S406. Further, in step S404, for example, when it is determined that the comparison target point is not found in the current direction and the attribute information is not set in that direction, the processing proceeds to step S406.
- step S406 the exception processing unit 223 determines whether to perform exception processing. For example, if the comparison target point is not found in the current direction and it is determined that exception processing is to be performed, the processing proceeds to step S407.
- step S407 the exception processing unit 223 performs exception processing according to the exception processing method set in step S401.
- step S407 ends, the process proceeds to step S408. Further, in step S406, for example, when the comparison target point is found in the current direction and it is determined that exception processing is not performed, the processing of step S407 is omitted, and the processing proceeds to step S408.
- step S408 the control unit 211 determines whether there is an unprocessed angle. If it is determined that there is an unprocessed angle, the process returns to step S403. In step S403, an unprocessed angle is set as a processing target (the current direction is updated), and the processing after step S404 is repeated.
- each process of steps S403 to S408 is performed for each direction in which the attribute information of the current point can be set.
- step S408 If it is determined in step S408 that the process has been performed for all directions, the attribute information update process ends, and the process returns to FIG.
- the encoding device 100 can suppress the reduction in subjective image quality of the point cloud.
- ⁇ Display device> When displaying a point cloud including points for which a plurality of pieces of attribute information are set, the attribute information used for display is selected according to the viewpoint direction.
- FIG. 26 is a block diagram illustrating a main configuration example of a display device which is an embodiment of an information processing device to which the present technology is applied.
- the display device 500 shown in FIG. 26 is a device for displaying a point cloud including points for which a plurality of attribute information are set.
- the display device 500 includes a point cloud data acquisition unit 501, a viewpoint direction setting unit 502, a geometric information drawing unit 503, an attribute information drawing unit 504, and a display unit 505.
- the point cloud data acquisition unit 501 acquires point cloud data including points for which a plurality of pieces of attribute information are set, from the outside of the display device 500.
- the point cloud data acquisition unit 501 supplies the acquired point cloud data to the viewpoint direction setting unit 502.
- the point cloud data acquisition unit 501 may have any configuration.
- the point cloud data acquisition unit 501 has a CPU, a ROM, a RAM, and the like, and the CPU stores programs and data stored in the ROM and the like in the RAM. By loading and executing, processing regarding acquisition of point cloud data may be performed.
- the viewpoint direction setting unit 502 sets a plane (viewpoint direction) on which the point cloud is to be displayed.
- the viewpoint direction setting unit 502 receives an instruction input from the outside such as a user operation and the like, and sets the viewpoint direction based on the instruction.
- the method of setting the viewpoint direction is arbitrary, and for example, the viewpoint direction setting unit 502 sets the viewpoint direction according to a predetermined predetermined pattern, and sets the viewpoint direction based on other than the above instruction input. You may When setting the viewpoint direction, the viewpoint direction setting unit 502 supplies point cloud data and information indicating the viewpoint direction to the geometric information drawing unit 503.
- the view direction setting unit 502 may have any configuration, but for example, the CPU has a ROM, a RAM, etc., and the CPU loads programs and data stored in the ROM etc. into the RAM.
- the processing related to the setting of the viewpoint direction may be performed by executing the processing.
- the geometrical information drawing unit 503 draws geometrical information of the point cloud data based on the set viewpoint direction.
- the geometry information drawing unit 503 supplies the point cloud data, the information indicating the viewpoint direction, and the drawing result thereof to the attribute information drawing unit 504.
- the geometrical information drawing unit 503 may have any configuration, but for example, it has a CPU, a ROM, a RAM, etc., and the CPU stores programs and data stored in the ROM etc. in the RAM. By loading and executing, processing concerning drawing of geometric information may be performed.
- the attribute information drawing unit 504 selects attribute information of each point based on the set viewpoint direction, and draws the selected attribute information.
- the attribute information drawing unit 504 supplies the drawing result of the geometric information and the attribute information to the display unit 505.
- the attribute information drawing unit 504 may have any configuration.
- the attribute information drawing unit 504 has a CPU, a ROM, a RAM, etc., and the CPU loads programs and data stored in the ROM etc. into the RAM.
- the processing related to the drawing of the attribute information may be performed by executing the processing.
- the display unit 505 displays the supplied drawing result of the geometric information and the attribute information on the monitor.
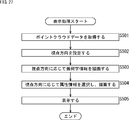
- the point cloud data acquisition unit 501 acquires point cloud data in step S502.
- step S502 the viewpoint direction setting unit 502 sets a viewpoint direction for displaying the point cloud.
- step S503 the geometrical information drawing unit 503 draws geometrical information of the point cloud data according to the viewpoint direction set in step S502.
- step S504 the attribute information drawing unit 504 selects attribute information in accordance with the viewpoint direction set in step S502, and draws the selected attribute information.
- step S505 the display unit 505 displays the image of the geometric information and the attribute information drawn in steps S503 and S504.
- step S505 ends, the display process ends.
- the point cloud is displayed as a moving image, the above process is repeated for each frame.
- the display device 500 can display attribute information according to the viewpoint direction. For example, the color of each point may be changed according to the direction (viewpoint direction) in which the point cloud data is viewed.
- FIG. 28 is a block diagram illustrating an exemplary main configuration of an image processing apparatus that is an embodiment of an information processing apparatus to which the present technology is applied.
- An image processing apparatus 600 illustrated in FIG. 28 is an apparatus that performs predetermined image processing in which position information changes, on point cloud data that is input.
- the image processing apparatus 600 includes an image processing unit 601 and an attribute information updating unit 602.
- the image processing unit 601 performs predetermined image processing. For example, as in the example shown in FIG. 29, the image processing unit 601 performs point interpolation and resampling (repositioning). In the example of FIG. 29, the point 651 in the state A before processing is resampled, and is converted into the points 652 to 654 in the state B after processing. That is, the number of points is increasing.
- the image processing unit 601 supplies the point cloud data before and after processing to the attribute information updating unit 602.
- the image processing unit 601 may have any configuration.
- the image processing unit 601 has a CPU, a ROM, a RAM, and the like, and the CPU loads programs and data stored in the ROM and the like into the RAM.
- the processing related to the image processing may be performed by executing the processing.
- the attribute information update unit 602 updates attribute information using the point cloud data before and after the supplied image processing.
- the attribute information update unit 602 has the same configuration as the attribute information update unit 202 (FIG. 8) and performs the same processing.
- the attribute information update unit 602 searches the comparison target point corresponding to the current point from the point before the process, so the above-mentioned quantum
- the attribute information can be updated according to the change of the position information as in the case of
- step S601 the image processing unit 601 performs image processing accompanied by updating of geometrical information.
- step S602 the attribute information update unit 602 updates the point cloud attribute information so as to correspond to the update of the geometric information (change in position information) in the image processing of step S601.
- This attribute information update process is performed in the same flow as the case described with reference to the flowchart of FIG. 14, and thus the description thereof is omitted.
- step S602 ends, the image processing ends.
- the image processing apparatus 600 can suppress the reduction in the subjective image quality of the point cloud.
- the series of processes described above can be performed by hardware or software. In addition, some processes may be executed by hardware and other processes may be executed by software.
- a program that configures the software is installed on a computer.
- the computer includes, for example, a general-purpose personal computer that can execute various functions by installing a computer incorporated in dedicated hardware and various programs.
- FIG. 31 is a block diagram showing an example of a hardware configuration of a computer that executes the series of processes described above according to a program.
- a central processing unit (CPU) 901, a read only memory (ROM) 902, and a random access memory (RAM) 903 are mutually connected via a bus 904.
- An input / output interface 910 Also connected to the bus 904 is an input / output interface 910.
- An input unit 911, an output unit 912, a storage unit 913, a communication unit 914, and a drive 915 are connected to the input / output interface 910.
- the input unit 911 includes, for example, a keyboard, a mouse, a microphone, a touch panel, an input terminal, and the like.
- the output unit 912 includes, for example, a display, a speaker, and an output terminal.
- the storage unit 913 is formed of, for example, a hard disk, a RAM disk, a non-volatile memory, or the like.
- the communication unit 914 includes, for example, a network interface.
- the drive 915 drives removable media 921 such as a magnetic disk, an optical disk, a magneto-optical disk, or a semiconductor memory.
- the CPU 901 loads the program stored in the storage unit 913 into the RAM 903 via the input / output interface 910 and the bus 904 and executes the program. Processing is performed.
- the RAM 903 also stores data necessary for the CPU 901 to execute various processes.
- the program executed by the computer can be recorded and applied to, for example, a removable medium 921 as a package medium or the like.
- the program can be installed in the storage unit 913 via the input / output interface 910 by attaching the removable media 921 to the drive 915.
- the program can also be provided via a wired or wireless transmission medium such as a local area network, the Internet, or digital satellite broadcasting.
- the program can be received by the communication unit 914 and installed in the storage unit 913.
- this program can be installed in advance in the ROM 902 or the storage unit 913.
- the present technology relates to any configuration that configures an apparatus or system, for example, a processor as a system LSI (Large Scale Integration) or the like, a module using a plurality of processors, a unit using a plurality of modules, etc. It can also be implemented as a set or the like with additional functions (ie, part of the configuration of the device).
- a processor as a system LSI (Large Scale Integration) or the like
- a module using a plurality of processors a unit using a plurality of modules, etc.
- additional functions ie, part of the configuration of the device.
- the system means a set of a plurality of components (apparatus, modules (parts), etc.), and it does not matter whether all the components are in the same case. Therefore, a plurality of devices housed in separate housings and connected via a network and one device housing a plurality of modules in one housing are all systems. .
- the above-described processing unit may be realized with any configuration as long as it has the function described for the processing unit.
- the processing unit may be configured by any circuit, an LSI, a system LSI, a processor, a module, a unit, a set, a device, an apparatus, a system, or the like.
- a plurality of them may be combined.
- the same type of configuration may be combined as a plurality of circuits, a plurality of processors, or the like, or different types of configurations such as a circuit and an LSI may be combined.
- the configuration described as one device (or processing unit) may be divided and configured as a plurality of devices (or processing units).
- the configuration described as a plurality of devices (or processing units) in the above may be collectively configured as one device (or processing unit).
- configurations other than those described above may be added to the configuration of each device (or each processing unit).
- part of the configuration of one device (or processing unit) may be included in the configuration of another device (or other processing unit) if the configuration or operation of the entire system is substantially the same. .
- the present technology can have a cloud computing configuration in which one function is shared and processed by a plurality of devices via a network.
- the program described above can be executed on any device.
- the device may have necessary functions (functional blocks and the like) so that necessary information can be obtained.
- each step described in the above-described flowchart can be executed by one device or in a shared manner by a plurality of devices.
- the plurality of processes included in one step can be executed by being shared by a plurality of devices in addition to being executed by one device.
- a plurality of processes included in one step can be executed as a process of a plurality of steps.
- the processes described as a plurality of steps can be collectively performed as one step.
- the program executed by the computer may be such that the processing of the steps describing the program is executed in chronological order according to the order described in this specification, in parallel or when a call is made, etc. It may be executed individually at the necessary timing of That is, as long as no contradiction arises, the processing of each step may be performed in an order different from the order described above. Furthermore, the process of the step of writing this program may be executed in parallel with the process of another program, or may be executed in combination with the process of another program.
- An attribute information setting unit configured to compare the comparison target point searched by the search unit with a current point and set attribute information of the current point.
- the search unit is configured to locate a point located closer than a predetermined distance to the current point of the point cloud data before the position information is updated, and the point located closest to the current point as the comparison target point
- the information processing apparatus according to (1) or (2).
- the search unit is selected according to another algorithm of the point cloud data before the position information is updated, and a point located closer than a predetermined distance with respect to the current point is the comparison target point
- the information processing apparatus according to any one of (1) to (3).
- the attribute information setting unit sets the attribute information based on the positional relationship between points in the direction from the point cloud data before the position information is updated to the point cloud data in which the position information is updated.
- the information processing apparatus according to any one of 1) to (4).
- the attribute information setting unit sets the attribute information based on the positional relationship between points in the direction from the point cloud data whose position information has been updated to the point cloud data before the position information is updated.
- An information processing apparatus according to any one of 1) to (5).
- the attribute information setting unit updates the position information from the direction from the point cloud data before the position information is updated to the point cloud data whose position information is updated and the point cloud data whose position information is updated.
- the information processing apparatus according to any one of (1) to (6), wherein the attribute information is set based on a positional relationship between both points in a direction toward the point cloud data before being processed.
- the attribute information setting unit selects any one of the plurality of comparison target points searched by the search unit, and sets the attribute information of the current point.
- the information processing apparatus according to any one of 7).
- the attribute information setting unit sets an average of attribute information of the plurality of comparison target points searched by the search unit to the attribute information of the current point (1) to (8) Information processor as described.
- the attribute information setting unit sets the weighted average of each attribute information of the plurality of comparison target points searched by the search unit to the attribute information of the current point (1) to (9) Information processing apparatus described in.
- (11) The information processing apparatus according to (10), wherein the weight is a distance based on a distance between the comparison target point and the current point or a feature of attribute information of the comparison target point.
- (12) The information processing apparatus according to any one of (1) to (11), further including an exception processing unit that performs predetermined exception processing when the comparison target point does not exist.
- the information processing apparatus controls the method of determining the attribute information based on at least one of processing speed, quality, and compression algorithm.
- the control unit further controls a comparison method of the current point and the comparison target point, The information processing apparatus according to (16) or (17), wherein the attribute information setting unit compares the current point with the comparison target point using a comparison method selected by the control unit.
- the control unit controls a method of determining the comparison target point, The information processing apparatus according to any one of (16) to (18), wherein the search unit determines the comparison target point using the determination method selected by the control unit.
- the system further comprises an exception processing unit that performs predetermined exception processing when the comparison target point does not exist.
- the control unit controls a method of the exception handling, The information processing apparatus according to any one of (16) to (19), wherein the exception processing unit performs exception processing selected by the control unit.
- the attribute information setting unit sets each of the plurality of attribute information in directions different from each other as viewed from the current point.
- the information processing apparatus according to (22) or (23), wherein the attribute information setting unit sets information indicating the number of divisions in the latitudinal direction and the longitudinal direction as the direction of allocating the attribute information.
- the point cloud data in which the position information is updated is voxel data obtained by quantizing the point cloud data.
- the attribute information includes at least one of color information, an ⁇ channel, and a normal vector.
- a point to be compared which is a point to be compared with the current point that is the point to be processed of the point cloud data whose position information is updated, is searched.
- An information processing method comprising: comparing the searched comparison point with a current point, and setting attribute information of the current point.
- 100 encoding device 101 control unit, 111 preprocessing unit, 112 bounding box setting unit, 113 voxel setting unit, 114 signal sequence generation unit, 115 encoding unit, 201 geometric information encoding unit, 202 attribute information updating unit, 203 attribute information encoding unit, 204 combining unit, 221 comparison object search unit, 222 attribute information setting unit, 223 exception processing unit, 231 comparison method setting unit, 232 comparison object determination method setting unit, 233 attribute determination method setting unit, 234 Exception processing method setting unit, 300 decoding unit, 301 decoding unit, 302 voxel data generation unit, 303 point cloud processing unit, 321 geometry information decoding unit, 322 attribute information decoding unit, 323 invisible processing unit, 500 display unit , 501 point cloud data acquisition unit, 502 viewpoint direction setting unit, 503 geometric information drawing unit, 504 attribute information drawing unit, 505 display unit, 600 image processing apparatus, 601 image processing unit, 602 attribute information update unit, 900 the computer
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Geometry (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- Computer Graphics (AREA)
- Software Systems (AREA)
- Signal Processing (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
- Image Generation (AREA)
Abstract
Description
1.位置情報が更新されたポイントへの単数属性情報の設定
2.第1の実施の形態(符号化装置:単数属性情報の設定)
3.第2の実施の形態(復号装置:単数属性情報の設定)
4.第3の実施の形態(符号化装置:複数属性情報の設定)
5.第4の実施の形態(表示装置:複数属性情報の設定)
6.第5の実施の形態(画像処理装置)
7.その他
<ポイントクラウド>
従来、点群の位置情報や属性情報等により3次元構造を表すポイントクラウドや、頂点、エッジ、面で構成され、多角形表現を使用して3次元形状を定義するメッシュ等のデータが存在した。
一般的に、このような位置情報の量子化によって、Geometry情報(幾何学情報)が歪み、ポイントの位置がずれる場合が多い。各ポイントには、位置情報(幾何学情報)とともに属性情報も設定されている。したがって、このような量子化により、色情報等の属性情報の位置関係も歪み、比較対象のポイントが変わったり、増減したりして、PSNR(Peak Signal-to-Noise Ratio)が低減するおそれがあった。すなわち、ポイントクラウドの主観画質が低減するおそれがあった。
このような設定の概要を、図2乃至図4を参照して説明する。図2乃至図4は、位置情報の量子化によるポイントの変化の様子を示している。これらの図中のAは、量子化前のポイントクラウドを模式的に示したものである。また、これらの図中のBは、量子化後のポイントクラウドを模式的に示したものである。AtoBの各矢印は、量子化後を基準とする場合の、量子化前のポイントと量子化後のポイントとの対応関係を示しており、BtoAの各矢印は、その逆、すなわち、量子化前を基準とする場合の、量子化前のポイントと量子化後のポイントとの対応関係を示している。
<符号化装置>
図5は、本技術を適用した情報処理装置の一実施の形態である符号化装置の主な構成例を示すブロック図である。図5に示される符号化装置100は、符号化対象として入力されたポイントクラウドのデータを、ボクセルを用いて符号化し、得られた符号化データ等を出力する。その際、符号化装置100は、以下に説明するように本技術を適用した方法でこの符号化を行う。
図7は、符号化部115(図5)の主な構成例を示すブロック図である。図7に示されるように、符号化部115は、幾何学情報符号化部201、属性情報更新部202、属性情報符号化部203、および合成部204を有する。
図8は、属性情報更新部202(図7)の主な構成例を示すブロック図である。図8に示されるように、属性情報更新部202は、制御部211、比較対象探索部221、属性情報設定部222、および例外処理部223を有する。
図9は、制御部211(図8)の主な構成例を示すブロック図である。図9に示されるように、制御部211は、例えば、比較方法設定部231、比較対象決定方法設定部232、属性決定方法設定部233、および例外処理方法設定部234を有する。
例えば、点の位置がずれる場合、または、点の数が低減する場合、制御部211の比較方法設定部231乃至例外処理方法設定部234は、図11のAに示される表のように、用途(高速、高品質(客観指標重視)、高品質(主観指標重視)等)に応じて、各処理の方法を設定するようにしてもよい。また、例えば、リサンプリング等により点の数が増大する場合、制御部211の比較方法設定部231乃至例外処理方法設定部234は、図11のBに示される表のように、用途(高速、高品質(客観指標重視)、高品質(主観指標重視)等)に応じて、各処理の方法を設定するようにしてもよい。
以上のような構成の符号化装置100により実行される符号化処理の流れの例を図12のフローチャートを参照して説明する。
次に、図12のステップS105において実行される信号列符号化処理の流れの例を、図13のフローチャートを参照して説明する。
次に、図14のフローチャートを参照して、図13のステップS122において実行される属性情報更新処理の流れの例を説明する。
次に、図15のフローチャートを参照して、図14のステップS141において実行される制御処理の流れの例を説明する。
DAG(有効指向性グラフ)処理を行う場合において、従来の通りに行う方法(Dag ORG)、BtoAの方向について幾何学情報の変化を考慮して属性情報を更新する方法(Dag BtoA)、および、AtoB, BtoAの両方について幾何学情報の変化を考慮して属性情報を更新する方法(Dag New)のそれぞれのPSNR評価結果を比較したものを図16に示す。
<復号装置>
符号化装置100が生成したビットストリームを復号する復号装置は、幾何学情報とともに属性情報も復号する。また、ポイントに対して不可視属性(no_color_attribute)が設定されている場合、復号装置は、そのポイントを不可視にするように処理を行う。
図18は、復号部301の主な構成例を示すブロック図である。図18に示されるように、復号部301は、幾何学情報復号部321、属性情報復号部322、および不可視処理部323を有する。
この場合の復号装置300により実行される復号処理の流れの例を、図19のフローチャートを参照して説明する。
次に、図19のステップS301において実行されるビットストリーム復号処理の流れの例を、図20のフローチャートを参照して説明する。
<複数属性情報の設定>
なお、以上においては、1つのポイントに対して単数の属性情報を設定するように説明したが、これに限らず、1つのポイントに対して複数の属性情報を設定することができるようにしてもよい。
したがって、その場合、属性情報更新部202は、図8の場合と同様の構成を有する。図25のフローチャートを参照して、この場合の属性情報更新処理の流れの例を説明する。
<表示装置>
複数の属性情報が設定されたポイントを含むポイントクラウドを表示する場合、表示に用いられる属性情報がその視点方向によって選択される。
このような表示装置500により実行される表示処理の流れの例を、図27のフローチャートを参照して説明する。
<画像処理装置>
以上においては、ポイントクラウドデータの符号化(量子化)について説明したが、本技術を適用した属性情報の更新は、ポイントクラウドの位置情報が変化する任意の画像処理において適用することができる。
図30のフローチャートを参照して、この画像処理装置600により実行される画像処理の流れの例を説明する。
<ソフトウエア>
上述した一連の処理は、ハードウエアにより実行させることもできるし、ソフトウエアにより実行させることもできる。また、一部の処理をハードウエアにより実行させ、他の処理をソフトウエアにより実行させることもできる。一連の処理をソフトウエアにより実行する場合には、そのソフトウエアを構成するプログラムが、コンピュータにインストールされる。ここでコンピュータには、専用のハードウエアに組み込まれているコンピュータや、各種のプログラムをインストールすることで、各種の機能を実行することが可能な、例えば汎用のパーソナルコンピュータ等が含まれる。
本技術の実施の形態は、上述した実施の形態に限定されるものではなく、本技術の要旨を逸脱しない範囲において種々の変更が可能である。
(1) 位置情報が更新される前のポイントクラウドデータから、位置情報が更新されたポイントクラウドデータの処理対象のポイントであるカレントポイントと比較するポイントである比較対象ポイントを探索する探索部と、
前記探索部により探索された前記比較対象ポイントとカレントポイントとを比較し、カレントポイントの属性情報を設定する属性情報設定部と
を備える情報処理装置。
(2) 前記探索部は、位置情報が更新される前のポイントクラウドデータの、前記カレントポイントに対して最近傍に位置するポイントを前記比較対象ポイントとして選択する
(1)に記載の情報処理装置。
(3) 前記探索部は、位置情報が更新される前のポイントクラウドデータの、前記カレントポイントに対して、所定の距離より近くに位置し、かつ、最近傍に位置するポイントを前記比較対象ポイントとして選択する
(1)または(2)に記載の情報処理装置。
(4) 前記探索部は、位置情報が更新される前のポイントクラウドデータの、他のアルゴリズムに従って選択され、かつ、前記カレントポイントに対して所定の距離より近くに位置するポイントを前記比較対象ポイントとして選択する
(1)乃至(3)のいずれかに記載の情報処理装置。
(5) 前記属性情報設定部は、位置情報が更新される前のポイントクラウドデータから位置情報が更新されたポイントクラウドデータへ向かう方向のポイント同士の位置関係に基づいて前記属性情報を設定する
(1)乃至(4)のいずれかに記載の情報処理装置。
(6) 前記属性情報設定部は、位置情報が更新されたポイントクラウドデータから位置情報が更新される前のポイントクラウドデータへ向かう方向のポイント同士の位置関係に基づいて前記属性情報を設定する
(1)乃至(5)のいずれかに記載の情報処理装置。
(7) 前記属性情報設定部は、位置情報が更新される前のポイントクラウドデータから位置情報が更新されたポイントクラウドデータへ向かう方向と、位置情報が更新されたポイントクラウドデータから位置情報が更新される前のポイントクラウドデータへ向かう方向との両方のポイント同士の位置関係に基づいて前記属性情報を設定する
(1)乃至(6)のいずれかに記載の情報処理装置。
(8) 前記属性情報設定部は、前記探索部により探索された複数の前記比較対象ポイントの内のいずれか1つの属性情報を選択し、前記カレントポイントの属性情報を設定する
(1)乃至(7)のいずれかに記載の情報処理装置。
(9) 前記属性情報設定部は、前記探索部により探索された複数の前記比較対象ポイントの各属性情報の平均を前記カレントポイントの属性情報を設定する
(1)乃至(8)のいずれかに記載の情報処理装置。
(10) 前記属性情報設定部は、前記探索部により探索された複数の前記比較対象ポイントの各属性情報の重み付き平均を前記カレントポイントの属性情報を設定する
(1)乃至(9)のいずれかに記載の情報処理装置。
(11) 前記重みは、前記比較対象ポイントと前記カレントポイントとの距離、または、前記比較対象ポイントの属性情報の特徴に基づく係数である
(10)に記載の情報処理装置。
(12) 前記比較対象ポイントが存在しない場合に所定の例外処理を行う例外処理部をさらに備える
(1)乃至(11)のいずれかに記載の情報処理装置。
(13) 前記例外処理部は、前記カレントポイントの属性情報として、前記カレントポイントを不可視とする不可視属性を設定する
(12)に記載の情報処理装置。
(14) 前記例外処理部は、前記カレントポイントを符号化対象より除外して再符号化させる
(12)または(13)に記載の情報処理装置。
(15) 前記例外処理部は、前記カレントポイントが出現しなくなるように符号化方法を変更して再符号化させる
(12)乃至(14)のいずれかに記載の情報処理装置。
(16) 属性情報の決定方法を制御する制御部をさらに備え、
前記属性情報設定部は、前記制御部により選択された属性情報の決定方法を用いて、前記カレントポイントの属性情報を設定するように構成される
(1)乃至(15)のいずれかに記載の情報処理装置。
(17) 前記制御部は、処理速度、品質、および圧縮アルゴリズムの内、少なくともいずれか1つに基づいて、前記属性情報の決定方法を制御する
(16)に記載の情報処理装置。
(18) 前記制御部は、さらに、前記カレントポイントと前記比較対象ポイントとの比較方法を制御し、
前記属性情報設定部は、前記制御部により選択された比較方法を用いて前記カレントポイントと前記比較対象ポイントとを比較する
(16)または(17)に記載の情報処理装置。
(19) 前記制御部は、前記比較対象ポイントの決定方法を制御し、
前記探索部は、前記制御部により選択された決定方法を用いて前記比較対象ポイントを決定する
(16)乃至(18)のいずれかに記載の情報処理装置。
(20) 前記比較対象ポイントが存在しない場合に所定の例外処理を行う例外処理部をさらに備え、
前記制御部は、前記例外処理の方法を制御し、
前記例外処理部は、前記制御部により選択された例外処理を行う
(16)乃至(19)のいずれかに記載の情報処理装置。
(21) 前記属性情報設定部は、前記カレントポイントに対して、複数の属性情報を設定する
(1)乃至(20)のいずれかに記載の情報処理装置。
(22) 前記属性情報設定部は、前記複数の属性情報のそれぞれを、前記カレントポイントからみて互いに異なる方向に設定する
(21)に記載の情報処理装置。
(23) 前記属性情報設定部は、前記カレントポイントに設定可能な属性情報の数を示す情報と、属性情報を切り替える方向を示す情報とを設定する
(22)に記載の情報処理装置。
(24) 前記属性情報設定部は、前記属性情報を割り当てる方向として、緯度方向および経度方向のそれぞれの分割数を示す情報を設定する
(22)または(23)に記載の情報処理装置。
(25) 前記位置情報が更新されたポイントクラウドデータは、ポイントクラウドデータを量子化したボクセルデータである
(1)乃至(24)のいずれかに記載の情報処理装置。
(26) 前記属性情報は、色情報、αチャンネル、および法線ベクトルの内、少なくともいずれか1つを含む
(1)乃至(25)のいずれかに記載の情報処理装置。
(27) 位置情報が更新される前のポイントクラウドデータから、位置情報が更新されたポイントクラウドデータの処理対象のポイントであるカレントポイントと比較するポイントである比較対象ポイントを探索し、
探索された前記比較対象ポイントとカレントポイントとを比較し、カレントポイントの属性情報を設定する
情報処理方法。
Claims (20)
- 位置情報が更新される前のポイントクラウドデータから、位置情報が更新されたポイントクラウドデータの処理対象のポイントであるカレントポイントと比較するポイントである比較対象ポイントを探索する探索部と、
前記探索部により探索された前記比較対象ポイントとカレントポイントとを比較し、カレントポイントの属性情報を設定する属性情報設定部と
を備える情報処理装置。 - 前記探索部は、位置情報が更新される前のポイントクラウドデータの、前記カレントポイントに対して最近傍に位置するポイントを前記比較対象ポイントとして選択する
請求項1に記載の情報処理装置。 - 前記探索部は、位置情報が更新される前のポイントクラウドデータの、前記カレントポイントに対して、所定の距離より近くに位置し、かつ、最近傍に位置するポイントを前記比較対象ポイントとして選択する
請求項1に記載の情報処理装置。 - 前記探索部は、位置情報が更新される前のポイントクラウドデータの、他のアルゴリズムに従って選択され、かつ、前記カレントポイントに対して所定の距離より近くに位置するポイントを前記比較対象ポイントとして選択する
請求項1に記載の情報処理装置。 - 前記属性情報設定部は、
位置情報が更新される前のポイントクラウドデータから位置情報が更新されたポイントクラウドデータへ向かう方向のポイント同士の位置関係、
または、位置情報が更新されたポイントクラウドデータから位置情報が更新される前のポイントクラウドデータへ向かう方向のポイント同士の位置関係、
に基づいて前記属性情報を設定する
請求項1に記載の情報処理装置。 - 前記属性情報設定部は、位置情報が更新される前のポイントクラウドデータから位置情報が更新されたポイントクラウドデータへ向かう方向と、位置情報が更新されたポイントクラウドデータから位置情報が更新される前のポイントクラウドデータへ向かう方向との両方のポイント同士の位置関係に基づいて前記属性情報を設定する
請求項1に記載の情報処理装置。 - 前記属性情報設定部は、前記探索部により探索された複数の前記比較対象ポイントの内のいずれか1つの属性情報を選択し、前記カレントポイントの属性情報を設定する
請求項1に記載の情報処理装置。 - 前記属性情報設定部は、前記探索部により探索された複数の前記比較対象ポイントの各属性情報の平均を前記カレントポイントの属性情報を設定する
請求項1に記載の情報処理装置。 - 前記属性情報設定部は、前記探索部により探索された複数の前記比較対象ポイントの各属性情報の重み付き平均を前記カレントポイントの属性情報を設定する
請求項1に記載の情報処理装置。 - 前記重みは、前記比較対象ポイントと前記カレントポイントとの距離、または、前記比較対象ポイントの属性情報の特徴に基づく係数である
請求項9に記載の情報処理装置。 - 前記比較対象ポイントが存在しない場合に所定の例外処理を行う例外処理部をさらに備える
請求項1に記載の情報処理装置。 - 属性情報の決定方法を制御する制御部をさらに備え、
前記属性情報設定部は、前記制御部により選択された属性情報の決定方法を用いて、前記カレントポイントの属性情報を設定するように構成される
請求項1に記載の情報処理装置。 - 前記制御部は、処理速度、品質、および圧縮アルゴリズムの内、少なくともいずれか1つに基づいて、前記属性情報の決定方法を制御する
請求項12に記載の情報処理装置。 - 前記属性情報設定部は、前記カレントポイントに対して、複数の属性情報を設定する
請求項1に記載の情報処理装置。 - 前記属性情報設定部は、前記複数の属性情報のそれぞれを、前記カレントポイントからみて互いに異なる方向に設定する
請求項14に記載の情報処理装置。 - 前記属性情報設定部は、前記カレントポイントに設定可能な属性情報の数を示す情報と、属性情報を切り替える方向を示す情報とを設定する
請求項15に記載の情報処理装置。 - 前記属性情報設定部は、前記属性情報を割り当てる方向として、緯度方向および経度方向のそれぞれの分割数を示す情報を設定する
請求項15に記載の情報処理装置。 - 前記位置情報が更新されたポイントクラウドデータは、ポイントクラウドデータを量子化したボクセルデータである
請求項1に記載の情報処理装置。 - 前記属性情報は、色情報、αチャンネル、および法線ベクトルの内、少なくともいずれか1つを含む
請求項1に記載の情報処理装置。 - 位置情報が更新される前のポイントクラウドデータから、位置情報が更新されたポイントクラウドデータの処理対象のポイントであるカレントポイントと比較するポイントである比較対象ポイントを探索し、
探索された前記比較対象ポイントとカレントポイントとを比較し、カレントポイントの属性情報を設定する
情報処理方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020207007802A KR20200058398A (ko) | 2017-09-29 | 2018-09-14 | 정보 처리 장치 및 방법 |
| CN201880061353.9A CN111133478A (zh) | 2017-09-29 | 2018-09-14 | 信息处理装置和方法 |
| US16/649,295 US11315320B2 (en) | 2017-09-29 | 2018-09-14 | Information processing apparatus and method |
| JP2019544581A JP7268599B2 (ja) | 2017-09-29 | 2018-09-14 | 情報処理装置および方法 |
| EP18863672.4A EP3690824A4 (en) | 2017-09-29 | 2018-09-14 | DEVICE AND PROCESS FOR PROCESSING INFORMATION |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017189782 | 2017-09-29 | ||
| JP2017-189782 | 2017-09-29 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019065299A1 true WO2019065299A1 (ja) | 2019-04-04 |
Family
ID=65902295
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/034131 Ceased WO2019065299A1 (ja) | 2017-09-29 | 2018-09-14 | 情報処理装置および方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US11315320B2 (ja) |
| EP (1) | EP3690824A4 (ja) |
| JP (1) | JP7268599B2 (ja) |
| KR (1) | KR20200058398A (ja) |
| CN (1) | CN111133478A (ja) |
| WO (1) | WO2019065299A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2021075537A1 (ja) * | 2019-10-18 | 2021-04-22 | ||
| CN114073086A (zh) * | 2019-07-04 | 2022-02-18 | Lg 电子株式会社 | 点云数据处理设备和方法 |
| JP2022544571A (ja) * | 2019-08-14 | 2022-10-19 | エルジー エレクトロニクス インコーポレイティド | ポイントクラウドデータ送信装置、ポイントクラウドデータ送信方法、ポイントクラウドデータ受信装置及びポイントクラウドデータ受信方法。 |
Families Citing this family (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11818401B2 (en) | 2017-09-14 | 2023-11-14 | Apple Inc. | Point cloud geometry compression using octrees and binary arithmetic encoding with adaptive look-up tables |
| US10861196B2 (en) | 2017-09-14 | 2020-12-08 | Apple Inc. | Point cloud compression |
| US10897269B2 (en) | 2017-09-14 | 2021-01-19 | Apple Inc. | Hierarchical point cloud compression |
| US10909725B2 (en) | 2017-09-18 | 2021-02-02 | Apple Inc. | Point cloud compression |
| US11113845B2 (en) | 2017-09-18 | 2021-09-07 | Apple Inc. | Point cloud compression using non-cubic projections and masks |
| US10607373B2 (en) | 2017-11-22 | 2020-03-31 | Apple Inc. | Point cloud compression with closed-loop color conversion |
| US10699444B2 (en) | 2017-11-22 | 2020-06-30 | Apple Inc | Point cloud occupancy map compression |
| US10909726B2 (en) | 2018-04-10 | 2021-02-02 | Apple Inc. | Point cloud compression |
| US10867414B2 (en) | 2018-04-10 | 2020-12-15 | Apple Inc. | Point cloud attribute transfer algorithm |
| US10909727B2 (en) | 2018-04-10 | 2021-02-02 | Apple Inc. | Hierarchical point cloud compression with smoothing |
| US10939129B2 (en) | 2018-04-10 | 2021-03-02 | Apple Inc. | Point cloud compression |
| US11010928B2 (en) | 2018-04-10 | 2021-05-18 | Apple Inc. | Adaptive distance based point cloud compression |
| US11017566B1 (en) * | 2018-07-02 | 2021-05-25 | Apple Inc. | Point cloud compression with adaptive filtering |
| US11202098B2 (en) | 2018-07-05 | 2021-12-14 | Apple Inc. | Point cloud compression with multi-resolution video encoding |
| US11012713B2 (en) | 2018-07-12 | 2021-05-18 | Apple Inc. | Bit stream structure for compressed point cloud data |
| US11386524B2 (en) | 2018-09-28 | 2022-07-12 | Apple Inc. | Point cloud compression image padding |
| US11367224B2 (en) | 2018-10-02 | 2022-06-21 | Apple Inc. | Occupancy map block-to-patch information compression |
| US11430155B2 (en) | 2018-10-05 | 2022-08-30 | Apple Inc. | Quantized depths for projection point cloud compression |
| CN113168719A (zh) * | 2018-12-07 | 2021-07-23 | 松下电器(美国)知识产权公司 | 三维数据编码方法、三维数据解码方法、三维数据编码装置及三维数据解码装置 |
| BR112021016832A2 (pt) * | 2019-03-18 | 2021-10-19 | Panasonic Intellectual Property Corporation Of America | Método de codificação de dados tridimensionais, método de decodificação de dados tridimensionais, dispositivo de codificação de dados tridimensionais, e dispositivo de decodificação de dados tridimensionais |
| US11057564B2 (en) | 2019-03-28 | 2021-07-06 | Apple Inc. | Multiple layer flexure for supporting a moving image sensor |
| US11711544B2 (en) | 2019-07-02 | 2023-07-25 | Apple Inc. | Point cloud compression with supplemental information messages |
| US11627314B2 (en) | 2019-09-27 | 2023-04-11 | Apple Inc. | Video-based point cloud compression with non-normative smoothing |
| US11562507B2 (en) | 2019-09-27 | 2023-01-24 | Apple Inc. | Point cloud compression using video encoding with time consistent patches |
| US11538196B2 (en) | 2019-10-02 | 2022-12-27 | Apple Inc. | Predictive coding for point cloud compression |
| US11895307B2 (en) | 2019-10-04 | 2024-02-06 | Apple Inc. | Block-based predictive coding for point cloud compression |
| US11798196B2 (en) | 2020-01-08 | 2023-10-24 | Apple Inc. | Video-based point cloud compression with predicted patches |
| US11625866B2 (en) | 2020-01-09 | 2023-04-11 | Apple Inc. | Geometry encoding using octrees and predictive trees |
| US11615557B2 (en) | 2020-06-24 | 2023-03-28 | Apple Inc. | Point cloud compression using octrees with slicing |
| US11620768B2 (en) | 2020-06-24 | 2023-04-04 | Apple Inc. | Point cloud geometry compression using octrees with multiple scan orders |
| US11948338B1 (en) | 2021-03-29 | 2024-04-02 | Apple Inc. | 3D volumetric content encoding using 2D videos and simplified 3D meshes |
| JP7737646B2 (ja) * | 2021-12-16 | 2025-09-11 | 独立行政法人 国立印刷局 | 網点印刷物用データの作成方法 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012230294A (ja) * | 2011-04-27 | 2012-11-22 | Kyocera Document Solutions Inc | 定着装置及びそれを備えた画像形成装置 |
| JP2016224674A (ja) * | 2015-05-29 | 2016-12-28 | 株式会社日立製作所 | 点群データモデル化装置、および点群データモデル化方法 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6867774B1 (en) | 2002-12-02 | 2005-03-15 | Ngrain (Canada) Corporation | Method and apparatus for transforming polygon data to voxel data for general purpose applications |
| CN102024097A (zh) * | 2010-12-29 | 2011-04-20 | 深圳市海博科技有限公司 | 一种治疗计划中靶点布置优化方法和治疗计划系统 |
| JP5711039B2 (ja) * | 2011-04-27 | 2015-04-30 | 株式会社トプコン | 三次元点群位置データ処理装置、三次元点群位置データ処理方法、三次元点群位置データ処理システムおよびプログラム |
| US20170214943A1 (en) * | 2016-01-22 | 2017-07-27 | Mitsubishi Electric Research Laboratories, Inc. | Point Cloud Compression using Prediction and Shape-Adaptive Transforms |
| US20180310025A1 (en) * | 2017-04-24 | 2018-10-25 | Nokia Technologies Oy | Method and technical equipment for encoding media content |
| US10867414B2 (en) * | 2018-04-10 | 2020-12-15 | Apple Inc. | Point cloud attribute transfer algorithm |
| CN119251323A (zh) * | 2018-06-08 | 2025-01-03 | 松下电器(美国)知识产权公司 | 三维数据编码方法、三维数据解码方法、三维数据编码装置、以及三维数据解码装置 |
-
2018
- 2018-09-14 JP JP2019544581A patent/JP7268599B2/ja active Active
- 2018-09-14 US US16/649,295 patent/US11315320B2/en active Active
- 2018-09-14 KR KR1020207007802A patent/KR20200058398A/ko not_active Withdrawn
- 2018-09-14 CN CN201880061353.9A patent/CN111133478A/zh active Pending
- 2018-09-14 WO PCT/JP2018/034131 patent/WO2019065299A1/ja not_active Ceased
- 2018-09-14 EP EP18863672.4A patent/EP3690824A4/en not_active Withdrawn
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012230294A (ja) * | 2011-04-27 | 2012-11-22 | Kyocera Document Solutions Inc | 定着装置及びそれを備えた画像形成装置 |
| JP2016224674A (ja) * | 2015-05-29 | 2016-12-28 | 株式会社日立製作所 | 点群データモデル化装置、および点群データモデル化方法 |
Non-Patent Citations (2)
| Title |
|---|
| R. MEKURIASTUDENT MEMBER IEEEK. BLOMP. CESAR.MEMBER: "Design, Implementation and Evaluation of a Point Cloud Codec for Tele-Immersive Video", IEEE |
| See also references of EP3690824A4 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114073086A (zh) * | 2019-07-04 | 2022-02-18 | Lg 电子株式会社 | 点云数据处理设备和方法 |
| US12335520B2 (en) | 2019-07-04 | 2025-06-17 | Lg Electronics Inc. | Point cloud data processing apparatus and method |
| JP2022544571A (ja) * | 2019-08-14 | 2022-10-19 | エルジー エレクトロニクス インコーポレイティド | ポイントクラウドデータ送信装置、ポイントクラウドデータ送信方法、ポイントクラウドデータ受信装置及びポイントクラウドデータ受信方法。 |
| JP7640526B2 (ja) | 2019-08-14 | 2025-03-05 | エルジー エレクトロニクス インコーポレイティド | ポイントクラウドデータ送信装置、ポイントクラウドデータ送信方法、ポイントクラウドデータ受信装置及びポイントクラウドデータ受信方法。 |
| JPWO2021075537A1 (ja) * | 2019-10-18 | 2021-04-22 | ||
| JP7638883B2 (ja) | 2019-10-18 | 2025-03-04 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカ | 三次元データ復号方法、及び三次元データ復号装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US11315320B2 (en) | 2022-04-26 |
| JP7268599B2 (ja) | 2023-05-08 |
| EP3690824A4 (en) | 2020-09-23 |
| KR20200058398A (ko) | 2020-05-27 |
| JPWO2019065299A1 (ja) | 2020-10-22 |
| EP3690824A1 (en) | 2020-08-05 |
| CN111133478A (zh) | 2020-05-08 |
| US20200279435A1 (en) | 2020-09-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2019065299A1 (ja) | 情報処理装置および方法 | |
| JP7234925B2 (ja) | 情報処理装置および方法 | |
| JP7384159B2 (ja) | 画像処理装置および方法 | |
| US11943457B2 (en) | Information processing apparatus and method | |
| KR102521801B1 (ko) | 정보 처리 장치 및 방법 | |
| CN112740277A (zh) | 图像处理装置和图像处理方法 | |
| EP3691276A1 (en) | Information processing device and method | |
| JP7586078B2 (ja) | 情報処理装置および方法 | |
| CN111727461B (zh) | 信息处理装置和方法 | |
| CN112789657A (zh) | 图像处理装置和方法 | |
| US12505577B2 (en) | Information processing apparatus and method for prohibiting the combined use of scalable encoding and scaling encoding | |
| CN113795870A (zh) | 用于点云属性编解码的信道间预测和变换的技术和装置 | |
| KR20250143123A (ko) | 부호화 장치 및 방법 | |
| US20250104289A1 (en) | Information processing device and method | |
| WO2024084952A1 (ja) | 情報処理装置および方法 | |
| JP7544050B2 (ja) | 情報処理装置および方法 | |
| US12511790B2 (en) | Graph signal frequency-domain motion compensation for point cloud attributes coding | |
| WO2019198520A1 (ja) | 情報処理装置および方法 | |
| JP6294810B2 (ja) | 動画像符号化装置、動画像復号装置及びコンピュータプログラム | |
| CN115066902A (zh) | 图像处理装置和方法 | |
| JPH0837664A (ja) | 動画像符号化/復号化装置 | |
| CN120283266A (zh) | 用于位置编码中初始顶点选择的最优子网格编码顺序 | |
| CN113906477A (zh) | 信息处理装置和方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18863672 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2019544581 Country of ref document: JP Kind code of ref document: A |
|
| ENP | Entry into the national phase |
Ref document number: 20207007802 Country of ref document: KR Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2018863672 Country of ref document: EP Effective date: 20200429 |