WO2019131527A1 - 汎用学習済モデルの生成方法 - Google Patents
汎用学習済モデルの生成方法 Download PDFInfo
- Publication number
- WO2019131527A1 WO2019131527A1 PCT/JP2018/047297 JP2018047297W WO2019131527A1 WO 2019131527 A1 WO2019131527 A1 WO 2019131527A1 JP 2018047297 W JP2018047297 W JP 2018047297W WO 2019131527 A1 WO2019131527 A1 WO 2019131527A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- learned model
- learning
- learned
- initial
- model
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images














Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N20/00—Machine learning
- G06N20/20—Ensemble learning
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/90—Details of database functions independent of the retrieved data types
- G06F16/901—Indexing; Data structures therefor; Storage structures
- G06F16/9027—Trees
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N5/00—Computing arrangements using knowledge-based models
- G06N5/01—Dynamic search techniques; Heuristics; Dynamic trees; Branch-and-bound
Definitions
- the present invention relates to control of an operating device using machine learning technology, and more particularly to control of an operating device using a machine learner having a tree structure.
- Patent Document 1 a new machine learning framework having a tree structure is attracting attention.
- FIG. 18 is an explanatory view showing a basic configuration of a learning tree according to a new machine learning framework.
- FIG. 18A shows the structure of a learning tree in the learning method
- FIG. 18B shows an image of a state space corresponding to the structure.
- each node corresponding to each hierarchically divided state space is from the top node (start node or root node) to the bottom node (end node or leaf node) , It is comprised by arrange
- FIG. 18 shows an example in the case where N is 2, d is 2 and n is 2 in a learning tree of N layers and d dimensions and n, and the first layer of learning trees shown in FIG. 18A.
- the numbers 1 to 4 assigned to the four terminal nodes of the nodes correspond to the four state spaces shown in FIG. 18 (b), respectively.
- input data is sequentially associated with each divided state space, and these are accumulated in each state space.
- new nodes are sequentially generated.
- the prediction output is calculated by calculating transition vectors from respective data contained in the state space corresponding to nodes corresponding to new input data, and calculating the arithmetic mean of those transition vectors.
- the present invention has been made under the above-mentioned technical background, and an object thereof is to provide a system, method and the like for generating a universal learned model capable of coping with individual characteristics of an operating device. It is.
- a general purpose learned model generation method includes an initial learning step of performing learning on a predetermined machine learning model based on predetermined initial data to generate an initial learned model, and control of a predetermined operation device.
- a plurality of individual learning results obtained by incorporating the initially learned model to be performed into a plurality of the movement devices, and performing additional learning based on individual movement data obtained by respectively operating the movement devices.
- an integration step of integrating and processing the learned model to obtain a general purpose learned model.
- the generation of the initial learned model is performed in a predetermined initial learning server connected to a network, and the incorporation of the initial learned model into the operation device is performed from the initial learning server through the network. It may be performed by downloading to the device.
- the incorporation of the initially learned model into the operation device may be performed by mounting the initially learned model into an integrated circuit and incorporating the integrated circuit into each of the operation devices. Good.
- the general purpose learned model generation method may further include a reincorporation step of incorporating the general purpose learned model into each of the operation devices.
- the machine learning model may be a learning model having a tree structure configured by hierarchically arranging a plurality of nodes respectively associated with hierarchically divided state spaces. .
- the integrated circuit includes a communication unit that communicates with a predetermined integrated processing server, and the individual learned model is transmitted from each operating device to the integrated processing server via each communication unit, and the integrated The processing may be performed at the integrated processing server.
- the initial data may be data generated based on the operating device for test or a simulation of the operating device.
- the integration step may further include a selective integration step of selectively integrating the individual learned models based on accompanying information corresponding to each individual learned model.
- a method according to the present disclosure performs an initial learning step of performing learning on a predetermined machine learning model based on predetermined initial data to generate an initial learned model, and the initial learning performing control of a predetermined motion device.
- the embedded model is incorporated into a plurality of the operating devices, and additional learning is respectively performed on the basis of individual operation data obtained by operating each of the operating devices to perform a plurality of individual learned models.
- an integration step of integrating the individual learned models to obtain a general purpose learned model.
- the present disclosure can be conceptualized as a system. That is, the system according to the present disclosure performs an initial learning unit that performs learning on a predetermined machine learning model based on predetermined initial data to generate an initial learned model, and the initial learning that controls a predetermined operation device. A plurality of individual learned models obtained by performing additional learning on the basis of individual operation data obtained by incorporating a finalized model into a plurality of the operation devices and operating each of the operation devices respectively And an integration unit that performs integration processing to obtain a general purpose learned model.
- FIG. 1 is an explanatory diagram of the overall configuration of the system.
- FIG. 2 is an explanatory diagram of the configuration of the information processing apparatus.
- FIG. 3 is an explanatory diagram of the configuration of the operating device.
- FIG. 4 is a general flowchart concerning general purpose learned model generation.
- FIG. 5 is a general flowchart related to learning processing.
- FIG. 6 is a flowchart related to the calculation process of the error.
- FIG. 7 is a flowchart regarding the operation of the operating device.
- FIG. 8 is a flowchart regarding prediction processing.
- FIG. 9 is a flowchart regarding integration processing.
- FIG. 10 is a detailed flowchart of the integration process.
- FIG. 11 is a conceptual diagram (part 1) related to integration processing.
- FIG. 12 is a conceptual diagram (part 2) related to integration processing.
- FIG. 13 is an overall configuration diagram of a system (second embodiment).
- FIG. 14 is a general flowchart relating to general purpose learned model generation (second embodiment).
- FIG. 15 is a flowchart of processing for selecting a learned model to be integrated.
- FIG. 16 is a conceptual diagram of integration processing based on incidental information.
- FIG. 17 is a conceptual diagram of multistage integration processing performed using incidental information.
- FIG. 18 is an explanatory diagram of a basic configuration of a learning tree.
- FIG. 1 is an explanatory diagram of an entire configuration of a general purpose learned model generation system 5 according to the present embodiment.
- the general purpose learned model generation system 5 includes an information processing apparatus 1 that performs information processing such as learning processing described later, an integrated processing server 2 that integrates the learned models, and a plurality of robot arms and the like. And the respective devices 1 to 3 are connected to one another via the Internet. Note that, as described later, the integrated circuit 4 is loaded with a predetermined learned model that has been subjected to learning processing in the information processing apparatus 1, and the integrated circuit after loading of the learned model is mounted to each operating device 3. .
- FIG. 2 is an explanatory view of a schematic configuration of the information processing apparatus 1.
- the information processing apparatus 1 includes a display unit 11 including a display and the like, a voice output unit 12 for outputting voice via a speaker and the like, an input unit 13 for receiving input such as a keyboard and a mouse, and a CPU and the like.
- a storage unit 15 including a memory such as a ROM, a RAM, a flash memory, and a hard disk for storing an operation program and predetermined data, and a communication unit 1 for communicating with an external device. , They are connected to each other via a system bus.
- the control unit 14 reads a program and predetermined data from the storage unit 15 and performs predetermined information processing including machine learning.
- the hardware configuration of the integrated processing server 2 is also substantially the same as that of the information processing apparatus 1, and thus the description of the configuration is omitted here.
- FIG. 3 is an explanatory diagram of the configuration of the integrated circuit 4 mounted inside the operating device 3.
- the integrated circuit 4 comprises a control unit 41 comprising an MPU etc., a storage unit 42 comprising ROM, RAM etc., and a communication unit etc. for communicating with an external device such as the integrated processing server 2 etc.
- a communication unit 43, an output unit 44 connected to the operation circuit of the operation device 3 and the like to provide a control output, and an I / O unit 45 for input / output to an external device are mutually connected via a system bus or the like. It is electrically connected. That is, the control unit 41 can control the predetermined operation device 3 using the learned model read from the storage unit 42.
- FIG. 4 is a general flowchart of a method of generating a general purpose learned model. As apparent from the figure, when the process starts, the information processing apparatus 1 performs a learning process of a model having a tree structure (S10).
- S10 tree structure
- FIG. 5 is a detailed flowchart of the learning process (S10).
- the initial data consists of input data and corresponding teacher data
- the teacher data is obtained by simulation using an actual data group obtained by actually operating the operating device 3 or a physical simulator or the like. It is a data group.
- the operation device 3 is a robot arm
- the instruction value of the output torque, the actual joint angle data obtained by the angle sensor, the tip position photographed by the camera, etc. can be teacher data according to the control mode.
- the state space to which the input data should belong and the nodes corresponding to the state space are specified, whereby a plurality of nodes, ie, from the root node to the terminal node Path is identified (S102).
- a new node is generated at the position.
- calculation processing of an error corresponding to the prediction error of each node is performed (S103).
- a process (S104) of storing all data and parameters related to each node as a file is performed, and the process ends.
- the parameter is, for example, information on a range (learning space) to be learned, that is, the maximum value and the minimum value of input / output data, the structure of the network (the number of layers, the number of dimensions, the number of divisions) and the like.
- FIG. 6 is a flowchart showing the details of the error calculation process (S103).
- a root node is set as a target node (S1031).
- E t + 1 represents an error after updating
- E t represents an error before updating
- ⁇ represents a forgetting factor (0 ⁇ ⁇ 1)
- the focused node is the lowermost node (S1034), and if it is not the lowermost node, the focused node is changed to a node lower by one (S1035). ).
- the process of changing to a node lower by one on the route of the node of interest (S1035), the process of updating the error (S1032), and the saving process (S1033) It will be repeated.
- the focused node has reached the lowermost node (end node) (YES in S1034) (YES in S1034), the process ends. That is, according to this series of processing, an error E corresponding to the prediction accuracy is generated for all the nodes on the path.
- the method of calculating the error E is not limited to the above. Therefore, for example, an error or the like obtained by referring to a node existing on a path lower than the focused node may be used.
- FIG. 7 is a detailed flowchart of the operation (S30) of the operation device 3. As apparent from the figure, when the process starts, the motion control of the motion device 3 is performed by the prediction process using the learned model (S301).
- FIG. 8 is a flowchart regarding the details of the prediction process (S301).
- S301 new data regarding the operation device 3 is acquired, and the data is used as input data (S3011).
- a state space (node) to which it should belong is specified, whereby one path consisting of a plurality of series of nodes is specified (S 3012).
- a node with the smallest error E on the path is specified (S3013), and the arithmetic mean of the transition vectors of the respective data corresponding to the error E smallest node (combined vector of transition vectors
- the predicted output is generated based on (S3014).
- the predicted output is transmitted as a command value to the operating circuit of the operating device 3 through the output unit 44, and the operating device 3 operates accordingly. That is, the prediction output is generated based on the error minimum node on the path, and thereby the prediction output can be generated based on the node expected to have a relatively high prediction accuracy.
- the predicted output is generated based on data corresponding to the error minimum node on the path, but the present invention is not limited to such processing. Therefore, for example, the configuration may be such that the prediction output is always generated based on the data corresponding to the end node.
- the task of transitioning the joint angle of a one-joint robot arm having a joint angle of 0 degree at a predetermined reference to a state of 30 degrees in the initial state is taken as an example explain.
- the process starts and the initial angle (0 degrees) and the target angle (30 degrees) are given to the learned model which has learned the relationship between them and the command value of the output torque,
- a prediction process of the command value is performed, and the operation of the robot arm is controlled in accordance with the predicted output (S301).
- a sensor provided on the robot arm detects angle data as actual motion data (S302).
- the operation ends (YES in S303), and the additional learning process is performed using the actual angle value obtained from the sensor (S304).
- the robot arm performs additional learning for each actual operation to improve the accuracy.
- the output torque is predicted with the initial angle and the target angle as inputs here, the present disclosure is not limited to such a learning configuration. Therefore, it goes without saying that other combinations of input / output configurations may be adopted.
- FIG. 9 is a detailed flowchart of the integration process (S50).
- S501 parameter files generated when generating a learned model are read out for two different learned models
- S502 it is determined whether the learning sections match or approximately match (S502). If they do not match (S502 NO), integration can not be performed via a display (not shown) for the user.
- An error message notifying that effect is output (S505), and it is then determined whether integration processing of all learning trees is completed (S506).
- S 503 when the learning spaces match or approximately match, reading of data files regarding nodes of two learned models is performed (S 503).
- the process ends.
- the approximate matching of the learning space means, for example, within a range in which the maximum value / minimum value of data included in one of the learned models is given a margin of a predetermined ratio (for example, about 10%). , It means that the maximum value and the minimum value of the data included in other learned models are included.
- FIG. 10 is a detailed flowchart of the integration process (S504).
- the first node position is set as a target position (S5041).
- determination processing is performed as to whether any learning tree has a node at the target position (S5042).
- integration processing of the two nodes is performed (S5043).
- FIG. 12 is a conceptual diagram related to node integration processing (S5043).
- FIG. 12 (a) is a first example of integration in the case of integrating the two upper and lower colored nodes into one lower colored node.
- E represents the above-mentioned error
- C represents the number of data contained so far.
- the error E of the upper left node is ⁇ (> 0)
- the number of data C is k (an integer of 0 or more)
- the error E of the upper right node is ⁇ (> 0)
- the number of data C is m (0 or more Integer).
- the error E after integration is calculated by weighted addition of the above-mentioned errors ⁇ and ⁇ using the data numbers k and m.
- the number of data C after integration is calculated by adding the numbers of data k and m.
- integration of nodes is performed by performing weighted addition according to the number of included data, so that learning related parameters can be integrated according to the reliability based on the number of data. .
- FIG. 12 (b) is a second example of integration in which two upper and lower colored nodes are integrated into one lower colored node.
- the error E of the upper left node is ⁇ (> 0)
- the number of data C is n (an integer greater than or equal to 0)
- the error E of the upper right node is ⁇
- the number of data C is one.
- the fact that the error E is ⁇ is a value given for convenience because the number of data associated with the node is still one and the error is not defined.
- the error E after integration is calculated as ⁇ based on the above-mentioned errors ⁇ and ⁇ .
- the number of data C after integration is calculated as n + 1 by adding the number of data n and 1 together.
- each data, error E, and data number C corresponding to each node are to be integration targets, but the integration targets are these. It is not limited to the parameters. Therefore, when integrating the nodes, it goes without saying that other parameters associated with the nodes may be targets of integration.
- FIG. 11 is a conceptual diagram concerning integration of learning trees. As is apparent from the figure, when the first learning tree at the upper left of the figure and the second learning tree at the upper right of the figure are integrated, integration processing is performed for black nodes, as shown in the lower part of the figure. On the other hand, for white nodes, nodes of the first learning tree or the second learning tree will be replicated.
- the individual learned models can be integrated and integrated from the multiple operation devices 3 that have performed additional learning to the integrated processing server 2, they are used generically for such operation devices. It is possible to generate a learned model that can be done.
- the integrated model (general purpose learned model) is downloaded from the integrated processing server 2 to each operation device 3 via the network.
- a process is performed (S60). Specifically, after the elapse of a predetermined period, the owner or the like of the operation device 3 downloads the integrated model to an information processing device such as a personal computer (not shown), and from the information processing device via the I / O unit 45 The integrated model is transferred to each operation device 3 and stored in each storage unit 42 of the operation device 3. Thereafter, the process ends.
- the owner of the operation device 3 can also select whether to use the already installed learned model or to use the integrated model.
- the owner of the operation device 3 temporarily downloads the integrated model to an information processing device such as a personal computer (not shown), but the present disclosure is not limited to such a configuration. . Therefore, for example, the owner or the like of the operation device 3 may issue a download command to the operation device 3 so that the operation device 3 downloads the latest integrated model via the communication unit 43.
- FIG. 13 is an overall configuration diagram of a general purpose learned model generation system 100 according to the present embodiment.
- the general purpose learned model generation system 100 connects the first information processing apparatus 101, the second information processing apparatus 102, and the information processing terminal 103 via a network such as the Internet. Is configured by.
- the devices exchange information with each other through communication.
- the first information processing apparatus 101 mainly takes charge of learning processing, and performs initial learning, integration processing of a learned model, and the like.
- the second information processing apparatus 102 functions as an application server, for example, performs processing for providing a predetermined application program to the information processing terminal 103, predetermined processing on the server side, and the like. And communicate information with the information processing terminal 3.
- the information processing terminal 103 is an information processing apparatus such as a smartphone or a tablet computer, and can download a predetermined application program from the second information processing terminal 102.
- the information processing terminal 103 cooperates with the second information processing apparatus 102 to provide a user with a predetermined application.
- the information processing terminal 103 is connected to the wearable terminal 104 that can be paired according to a standard such as Bluetooth (registered trademark).
- the wearable terminal 104 includes various sensors for sensing blood pressure, heart rate, body temperature, number of steps, and the like, and the acquired sensor information is transmitted to the information processing terminal 3.
- the device configuration of each device is substantially the same as the configuration shown in FIG.
- a predetermined disease risk or the like of the user of the wearable terminal 104 is predicted by using various sensor information acquired from the wearable terminal 104 as input.
- the information acquired from the sensor includes vital sign information such as blood pressure, heart rate and temperature, and activity amount information such as the number of steps.
- FIG. 14 is a general flowchart concerning general purpose learned model generation according to the present embodiment.
- initial learning is performed using a learning model having a tree structure similar to that of the first embodiment (S81).
- the details of the learning process are substantially the same as those in FIG. 5 and FIG.
- learning processing in the present embodiment uses vital information such as blood pressure, heart rate, body temperature, etc. and activity amount information such as the number of steps, and disease information of various actual users (various numerical values, diagnosis results, health condition Evaluation is performed by performing supervised learning with teacher data as teaching data. That is, it is possible to obtain a learned model which outputs disease information such as disease risk predicted by the user based on vital information and activity amount information by learning processing.
- the learned model generated in the first information processing apparatus 101 is downloaded to each information processing terminal 103 via application software executed on the information processing terminal 103 (S82). It may be downloaded to each information processing terminal 103 in accordance with an instruction from the information processing terminal 102 functioning as an application server.
- the information processing terminal 103 receives the input of the incidental information on the user according to the application program, and stores the input in the internal storage unit.
- the incidental information is, for example, information on the age, gender, or the area in which the user lives.
- each information processing terminal 103 performs additional learning individually (S83).
- the details of the additional learning process are substantially the same as those shown in FIG. 7 and FIG.
- actual disease information of each user input via application software is used as actual operation data.
- the end of the operation (S303) is determined, for example, by the passage of a predetermined period.
- the additionally learned learned model and the accompanying information on the user who transmits the learned model are transmitted to the first information processing apparatus 101 (S84).
- the first information processing apparatus 101 When the additionally learned learned model and the accompanying information are received, the first information processing apparatus 101 performs a process of integrating the learned models based on the accompanying information (S85).
- FIG. 15 is a flowchart of processing for selecting a learned model to be integrated.
- the first information processing apparatus 101 selects a learned model to be integrated according to the predetermined selection criteria and the received accompanying information (S851).
- the predetermined selection criterion is a selection criterion which is stored in advance in the first information processing apparatus 101 or set by another device or terminal, and the content thereof is, for example, the area information in which the user lives. It is also good. That is, the first information processing apparatus 101 performs, for example, a process of selecting only a learned model relating to a user who lives in the same area.
- each general purpose learned model is an integrated one of the learned models of users who live in the same area.
- the description is abbreviate
- FIG. 16 is a conceptual diagram of the integration process (S85) based on the accompanying information.
- a plurality of learned models having a tree structure are arranged in upper and lower two stages.
- the lower stage (first hierarchy) is a plurality of learned models 110-1 to 110-N (N is a natural number of 2 or more) in which additional learning is individually performed on each information processing terminal 103.
- N is a natural number of 2 or more
- a plurality of learned models 120-1 to 120-M (where M is two or more) having a tree structure generated by integrating the learned models 110-1 to 110-N on the lower stage It is a natural number).
- a plurality of learned states are obtained based on the lower plurality of learned models obtained from the users living in the same area.
- the models are integrated to generate a plurality of learned models having a tree structure shown in the upper stage (second hierarchy).
- each stored learned model may be configured to be downloadable to each information processing terminal 103 thereafter. Also, each learned model stored may be transmitted to the second information processing apparatus. At this time, the corresponding learned model may be downloadable according to the accompanying information. For example, the prediction model (learned model) suitable for those who live in the same area as oneself may be downloaded.
- the additionally learned model is integrated based on the predetermined selection criteria and the accompanying information, it is possible to generate a general purpose learned model integrating the learned models in which the accompanying information is common. This makes it possible to generate a learned model suitable for a specific application or user.
- timing of transmission of the learned model after the additional learning is not particularly limited in the above embodiment, the timing of the transmission may be after the progress of the additional learning to some extent or may be sequential. It may be one.
- the information is aggregated to the integrated processing server 2 on the network, but may be aggregated to a PLC (programmable logic controller) or the like connected to the network, for example.
- PLC programmable logic controller
- the robot arm is exemplified as the operating device 3, but the invention is not limited to such an operating device.
- the operating device for example, sensor equipment, mobile phones, cars, drones, AI speakers, ships, floating floats, tunnel drilling shields, construction heavy machinery, railways, EVs, air conditioning, compressors, factory machines, home robots, fusion control, PLC
- the present invention is applicable to various operation devices such as communication gateways, smart houses, wearable terminals, home appliances, various meters (such as electric water gas), game machines, and the like.
- the operation in the present disclosure is not limited to only the mechanical operation of the device, and includes, for example, an electrical or electromagnetic operation or the like in the device.
- the learning model which has been learned in advance is installed in the integrated circuit 4, and the integrated circuit 4 is incorporated in the operation device 3 and then additional learning is performed separately.
- the disclosure is not limited to such a configuration. Therefore, for example, after performing prior learning on the information processing apparatus 1 to generate a learned model, the learned model is directly or indirectly downloaded to each operation device 3, and based on the downloaded learned model Additional learning may be performed in each operating device 3.
- the information processing apparatus 1 and the integrated processing server 2 are shown as separate components, but may be integrated. In addition, some functions may be independent or distributed processing may be performed.
- the integrated circuit 4 in the first embodiment may be configured by an FPGA (Field-Programmable Gate Array) or the like.
- the integration processing based on the accompanying information is described as the configuration to be performed in two steps.
- the present invention is not limited to such a configuration. Therefore, for example, integration may be performed in multiple stages, each of which may be stored, and an appropriate integrated learned model may be provided in response to a request from the information processing terminal 103 or the like.
- FIG. 17 is a conceptual diagram of multistage integration processing performed using incidental information.
- the lowermost portion shows the first layer 130 including learned models 130-1 to 130-N obtained by performing additional learning in the individual information processing terminal 103.
- the middle row shows the second hierarchy 140 including learned models 140-1 to 140-M obtained by integrating and processing the learned models of the hierarchy immediately below.
- the top row shows the K-th hierarchy 150 including the learned models 150-1 to 150-L obtained by integrating and processing the learned models in the hierarchy immediately below.
- multistage integration processing may be performed based on the accompanying information.
- the learned models of the first hierarchy may be integrated based on the regional information and the like
- the integration process may be performed based on the regional information from a wider viewpoint.
- integration processing may be performed stepwise based on gender and age information and the like.
- an appropriate integrated learned model can be provided to the information processing terminal 103 and the second information processing apparatus 102 as needed.
- the learning model which used the tree structure as a learning model was adopted, it is not limited to such a method. Therefore, other learning models that can be integrated can be adopted.
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Software Systems (AREA)
- General Engineering & Computer Science (AREA)
- Data Mining & Analysis (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Evolutionary Computation (AREA)
- Computing Systems (AREA)
- Mathematical Physics (AREA)
- Artificial Intelligence (AREA)
- Databases & Information Systems (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Medical Informatics (AREA)
- Computational Linguistics (AREA)
- Manipulator (AREA)
- Image Analysis (AREA)
- Feedback Control In General (AREA)
Abstract
【課題】 同一の構成を有する一群の動作装置を適切に制御することが可能な汎用的学習済モデルを生成するシステム、方法等を提供すること。 【解決手段】 所定の機械学習モデルについて所定の初期データに基づいて学習を行って初期学習済モデルを生成する、初期学習ステップと、所定の動作装置の制御を行う前記初期学習済モデルを複数の前記動作装置へと組み込み、かつ、各前記動作装置を夫々動作させることにより得られた個別の動作データに基づいて夫々追加学習を行って得られた複数の個別学習済モデルを統合処理して汎用学習済モデルを得る、統合ステップと、を備える汎用学習済モデルの生成方法が提供される。
Description
この発明は、機械学習技術を利用した動作装置の制御、特に、木構造を有する機械学習器を用いた動作装置の制御に関する。
近年、大量のデータの存在、計算機の演算機能の飛躍的な向上、アルゴリズムの進歩等により機械学習の分野が高い注目を集めている。このような中、木構造を有する新たな機械学習の枠組みが注目されている(特許文献1)。
図18は、新たな機械学習の枠組みに係る学習木の基本的構成について示す説明図である。図18(a)には、当該学習手法における学習木の構造が示されており、図18(b)には、当該構造に対応する状態空間のイメージが示されている。同図から明らかな通り、学習木構造は、階層的に分割された各状態空間に対応する各ノードを、最上位ノード(始端ノード又は根ノード)から最下端ノード(末端ノード又は葉ノード)まで、樹形状乃至格子状に配置することにより構成されている。なお、同図は、N階層d次元n分割の学習木においてNが2、dが2、nが2の場合の例を示しており、図18(a)に記載の学習木の1階層目の4つの末端ノードに付された1~4の番号は、それぞれ、図18(b)に記載の4つの状態空間に対応している。
上記学習木を用いて学習処理を行う際には、入力されるデータが、逐次、分割された各状態空間に対応付けられ、それらが各状態空間に蓄積されていくこととなる。このとき、それまでデータが存在しなかった状態空間に新たにデータが入力された場合には、新たなノードが順次生成されていく。一方、予測出力は、新たな入力データに対応するノードへと対応する状態空間に内包される各データからそれぞれ遷移ベクトルを算出し、それらの遷移ベクトルの相加平均を取ることにより算出される。
ところで、近年、工場内のロボットアーム等、様々な動作装置へと機械学習技術を適用しようとする試みがあり、例えば、同一の構成を有する一群の動作装置へと、事前学習を行った学習済モデルを組み込むことがよく行われる。
しかしながら、たとえ同一の構成を有する動作装置であっても、個々の動作装置においては、個体差や経年変化等による機械的又は電気的な特性のばらつきが存在し、それにより事前学習済モデルでは全ての動作装置を適切に制御できないおそれがあった。
本発明は、上述の技術的背景の下になされたものであり、その目的とするところは、動作装置の個別の特性に対応可能な汎用的学習済モデルを生成するシステム、方法等を提供することにある。
本発明のさらに他の目的並びに作用効果については、明細書の以下の記述を参照することにより、当業者であれば容易に理解されるであろう。
上述の技術的課題は、以下の構成を有する方法、システムにより解決することができる。
本開示に係る汎用学習済モデルの生成方法は、所定の機械学習モデルについて所定の初期データに基づいて学習を行って初期学習済モデルを生成する、初期学習ステップと、所定の動作装置の制御を行う前記初期学習済モデルを複数の前記動作装置へと組み込み、かつ、各前記動作装置を夫々動作させることにより得られた個別の動作データに基づいて夫々追加学習を行って得られた複数の個別学習済モデルを統合処理して汎用学習済モデルを得る、統合ステップと、を備えている。
このような構成によれば、初期学習として共通の学習を行った後に、個別の動作装置に合わせて追加学習を行い、それらを統合するので、所定の動作装置の個別の特性にも対応できる汎用的な学習済モデルを生成することができる。また、初期学習を行っているため一定の精度を担保することができるので、動作装置の使用を継続しつつ汎用的な学習済モデルを生成することができる。
前記初期学習済モデルの生成は、ネットワークと接続された所定の初期学習サーバにおいて行われ、前記初期学習済モデルの前記動作装置への組み込みは、前記初期学習サーバから前記ネットワークを介して各前記動作装置へとダウンロードすることにより行われる、ものであってもよい。
また、前記初期学習済モデルの前記動作装置への組み込みは、前記初期学習済モデルを集積回路へと搭載し、当該集積回路を各前記動作装置へと組み込むことにより行われる、ものであってもよい。
前記汎用学習済モデルの生成方法は、さらに、前記汎用学習済モデルを各前記動作装置へと組み込む、再組込ステップ、を含むものであってもよい。
前記機械学習モデルは、階層的に分割された状態空間へとそれぞれ対応付けられた複数のノードを階層的に配置することにより構成された木構造を有する学習モデルである、ものであってもよい。
前記集積回路は、所定の統合処理サーバとの通信を行う通信部を備え、前記個別学習済モデルは、各前記動作装置から各前記通信部を介して前記統合処理サーバへと送信され、前記統合処理は、前記統合処理サーバにおいて実行される、ものであってもよい。
前記初期データは、テスト用の前記動作装置又は前記動作装置のシミュレーションに基づいて生成されたデータであってもよい。
前記統合ステップは、さらに、各前記個別学習済モデルに対応する付随情報に基づいて、前記個別学習済モデルを選択的に統合処理する選択的統合ステップを備える、ものであってもよい。
また、本開示は、下記のような方法としても観念することができる。すなわち、本開示に係る方法は、所定の機械学習モデルについて所定の初期データに基づいて学習を行って初期学習済モデルを生成する、初期学習ステップと、所定の動作装置の制御を行う前記初期学習済モデルを複数の前記動作装置へと組み込む、組込ステップと、各前記動作装置を夫々動作させることにより得られた個別の動作データに基づいて夫々追加学習を行って複数の個別学習済モデルを生成する追加学習ステップと、各前記個別学習済モデルを統合処理して汎用学習済モデルを得る、統合ステップと、を備えている。
さらに、本開示は、システムとしても観念することができる。すなわち、本開示に係るシステムは、所定の機械学習モデルについて所定の初期データに基づいて学習を行って初期学習済モデルを生成する、初期学習部と、所定の動作装置の制御を行う前記初期学習済モデルを複数の前記動作装置へと組み込み、かつ、各前記動作装置を夫々動作させることにより得られた個別の動作データに基づいて夫々追加学習を行って得られた複数の個別学習済モデルを統合処理して汎用学習済モデルを得る、統合部と、を備えている。
本開示によれば、動作装置の個別の特性にも対応できる汎用的な学習済モデルを生成することができる。
以下、本発明の実施の一形態を、添付の図面を参照しつつ、詳細に説明する。
<1.第1の実施形態>
図1~図12を参照しつつ、本開示の第1の実施形態について説明する。
図1~図12を参照しつつ、本開示の第1の実施形態について説明する。
<1.1 装置構成>
図1~図3を参照しつつ、本実施形態に係る汎用学習済モデル生成システム5の装置構成について説明する。
図1~図3を参照しつつ、本実施形態に係る汎用学習済モデル生成システム5の装置構成について説明する。
図1は、本実施形態に係る汎用学習済モデル生成システム5の全体構成に関する説明図である。同図から明らかな通り、汎用学習済モデル生成システム5は、後述の学習処理等の情報処理を行う情報処理装置1と、学習済モデルの統合を行う統合処理サーバ2と、ロボットアーム等の複数の動作装置3とを有し、各装置1~3は互いにインターネットを介して接続されている。なお、後述するように、集積回路4には、情報処理装置1において学習処理がなされた所定の学習済モデルが搭載され、学習済モデル搭載後の集積回路は各動作装置3へと搭載される。
図2は、情報処理装置1の概略構成に関する説明図である。同図から明らかな通り、情報処理装置1は、ディスプレイ等を含む表示部11、スピーカ等を介して音声出力を行う音声出力部12、キーボード、マウス等の入力を受け付ける入力部13、CPU等から成る制御部14、動作プログラムや所定のデータの記憶を行うROM、RAM、フラッシュメモリ、ハードディスク等のメモリから成る記憶部15、外部装置との間の通信を行うための通信部1とを有し、それらは互いにシステムバスを介して接続されている。制御部14は、記憶部15からプログラムや所定のデータを読み出して機械学習を含む所定の情報処理を行う。なお、統合処理サーバ2のハードウェア構成も情報処理装置1と略同一であるので、ここでは構成の説明を省略する。
図3は、動作装置3の内部に搭載される集積回路4の構成に関する説明図である。同図から明らかな通り、集積回路4は、MPU等から成る制御部41、ROM、RAM等から成る記憶部42、統合処理サーバ2等の外部装置との通信を行うための通信ユニット等から成る通信部43、動作装置3の動作回路等と接続され制御出力を提供する出力部44、外部装置との入出力を行うI/O部45とから構成され、それらは互いにシステムバス等を介して電気的に接続されている。すなわち、制御部41は、記憶部42から読み出した学習済モデルを用いて所定の動作装置3の制御を行うことができる。
<1.2 動作>
次に、図4~図12を参照しつつ、本実施形態に係る汎用学習済モデル生成システム5の動作について説明する。
次に、図4~図12を参照しつつ、本実施形態に係る汎用学習済モデル生成システム5の動作について説明する。
<1.2.1 初期学習ステップ>
図4は、汎用学習済モデルを生成する方法に関するゼネラルフローチャートである。同図から明らかな通り、処理が開始すると、情報処理装置1において、木構造を有するモデルの学習処理が行われる(S10)。
図4は、汎用学習済モデルを生成する方法に関するゼネラルフローチャートである。同図から明らかな通り、処理が開始すると、情報処理装置1において、木構造を有するモデルの学習処理が行われる(S10)。
図5は、学習処理(S10)の詳細フローチャートである。同図から明らかな通り、処理が開始すると、まず、初期データの読込みと学習モデルへの入力処理が行われる(S101)。ここで、初期データは、入力データと対応する教師データとから成り、教師データは、実際に動作装置3を動作させることにより得られた実際のデータ群や、物理シミュレータ等によるシミュレーションにより得られたデータ群である。例えば、動作装置3がロボットアームであれば、制御態様に応じて、出力トルクの指令値、角度センサにより得られた実際の関節角度データ、カメラで撮影された手先位置等が教師データとなり得る。学習モデルへの入力処理が完了すると、次に、入力データが属すべき状態空間とその状態空間に対応するノードが特定され、これにより、複数のノード、すなわち、根ノードから末端ノードへと至る一の経路が特定される(S102)。このとき、過去にアクティブとなったことのないノードが当該経路上に存在する場合には、当該位置に新たなノードが生成される。その後、経路上の各ノードについて、各ノードの予測誤差に相当する誤差の演算処理が行われる(S103)。その後、各ノードに関する全てのデータとパラメータをファイルとして保存する処理(S104)が行われて処理は終了する。尚、ここでパラメータとは例えば、学習対象となる値域(学習空間)、すなわち、入出力データの最大値及び最小値、ネットワークの構造(階層数、次元数、分割数)等に関する情報である。
図6は、誤差の演算処理(S103)の詳細について示したフローチャートである。処理が開始すると、まず、根ノードが着目ノードとして設定される(S1031)。次に、着目ノードについて、Et+1=(1-α)Et+α|O-O'|の式より誤差の更新処理が行われる(S1032)。ここで、Et+1は更新後の誤差、Etは更新前の誤差、αは忘却係数(0<α<1)を表し、同式から明らかな通り、更新後の誤差Et+1は、更新前の誤差Etと、入力データに基づく予測出力Oと着目ノードに包含されたデータに基づく予測出力O'との差分の絶対値とを、忘却係数αを用いて重み付け加算することにより演算される。すなわち、入力データに基づく予測出力Oと、着目ノードに包含された過去のデータに基づく予測出力O'との差分が小さい程、Et+1は小さくなるので、誤差Et+1が小さい程、予測精度が良いということとなる。更新された誤差Et+1は、当該着目ノードと対応付けられて誤差Eとして記憶部15へと保存される(S1033)。
その後、この着目ノードが最下層のノードであるか否かの判定処理が行われ(S1034)、最下層ノードでない場合には着目ノードを1つ下位のノードへと変更する処理が行われる(S1035)。この一連の処理、着目ノードの経路上の1つ下位のノードへの変更処理(S1035)、誤差の更新処理(S1032)、保存処理(S1033)は、最下層ノードへと至るまで(S1034NO)、繰り返し行われる。一方、着目ノードが最下層ノード(末端ノード)へと至った場合(S1034YES)、処理は終了する。すなわち、この一連の処理によれば、経路上のすべてのノードについてそれぞれ予測精度に相当する誤差Eが生成されることとなる。
なお、誤差Eの算出手法は上記に限定されない。従って、例えば、着目ノードより下位の経路上に存在するノードを参照する等して得られた誤差等を利用してもよい。
<1.2.2 搭載ステップ>
図4に戻り、学習処理が完了すると、学習結果に相当する学習済モデルを集積回路(IC)4へと搭載する処理がなされ、その後、当該集積回路4を各動作装置3へと搭載する処理が行われる(S20)。具体的には、上述の初期データに基づいて学習済の木構造モデルは、制御部41により読み出されて実行可能な態様にて記憶部42へと記憶される。また、学習済モデルはさらに、追加学習が可能な態様にて構成され、各動作装置3において新たなデータが得られた場合には、当該データに基づいてさらなる追加学習を行うことができるよう構成されている。
図4に戻り、学習処理が完了すると、学習結果に相当する学習済モデルを集積回路(IC)4へと搭載する処理がなされ、その後、当該集積回路4を各動作装置3へと搭載する処理が行われる(S20)。具体的には、上述の初期データに基づいて学習済の木構造モデルは、制御部41により読み出されて実行可能な態様にて記憶部42へと記憶される。また、学習済モデルはさらに、追加学習が可能な態様にて構成され、各動作装置3において新たなデータが得られた場合には、当該データに基づいてさらなる追加学習を行うことができるよう構成されている。
<1.2.3 追加学習ステップ>
動作装置3への搭載処理の完了後、搭載された学習済モデルを用いて実際に動作装置3の制御が行われると共に、当該動作により得られた実際の動作データに基づいて、追加的な学習処理が行われる(S30)。
動作装置3への搭載処理の完了後、搭載された学習済モデルを用いて実際に動作装置3の制御が行われると共に、当該動作により得られた実際の動作データに基づいて、追加的な学習処理が行われる(S30)。
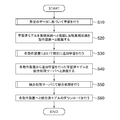
図7は、動作装置3の動作(S30)に関する詳細フローチャートである。同図から明らかな通り、処理が開始すると、学習済モデルを用いた予測処理により動作装置3の動作制御が行われる(S301)。
図8は、予測処理(S301)の詳細に関するフローチャートである。同図から明らかな通り、処理が開始すると、まず、動作装置3に関する新たなデータを取得し、当該データを入力データとする(S3011)。次に、当該入力データに基づいて、属すべき状態空間(ノード)が特定され、それにより、複数の一連のノードから成る一の経路が特定される(S3012)。一の経路が特定されると、当該経路上において誤差Eが最小となるノードが特定され(S3013)、当該誤差E最小ノードに対応する各データの遷移ベクトルの相加平均(遷移ベクトルの合成ベクトル)に基づいて、予測出力が生成される(S3014)。この予測出力は出力部44を介して動作装置3の動作回路へと指令値として伝達され、動作装置3はこれに応じて動作する。すなわち、経路上の誤差最小ノードに基づいて予測出力が生成され、これにより、予測精度が比較的良いと見込まれるノードに基づいて予測出力を生成することができる。
なお、本実施形態においては、予測出力は、経路上の誤差最小ノードに対応するデータに基づいて生成したが、このような処理に限定されない。従って、例えば、常に末端ノードに対応するデータに基づいて予測出力を生成するような構成としてもよい。
図7に戻り、予測処理が終了すると動作装置3の実機動作データが記憶される(S302)。この予測処理(S301)と動作データの記憶処理(S302)を含む一連の処理は、所定の動作終了条件を満たすまで繰り返される(S303NO)。所定の動作終了条件を満たした場合(S303)、一連の動作は終了し、記憶した動作データを教師データとする追加学習処理が行われる(S304)。この追加学習処理は図2に示した処理(S101~S104)と略同一であるので、ここでは説明を省略する。その後、処理は終了する。
図7における動作をより具体的に説明するため、初期状態において関節角度が所定の基準において0度をなしている一関節のロボットアームの関節角度を30度の状態へと移行するタスクを例に説明する。まず、処理が開始して、初期角度(0度)と目標角度(30度)が、それらと出力トルクの指令値との間の関係を学習した学習済モデルへと与えられると、出力トルクの指令値の予測処理が行われ、その予測出力に応じてロボットアームが動作制御される(S301)。動作制御後、ロボットアームに備えられたセンサは、実際の動作データとして角度データを検出する(S302)。その後、ロボットアームの実際の駆動をもってタスクが終了すると動作が終了し(S303YES)、センサから得られた実際の角度値を用いて追加学習処理が行われる(S304)。以上の通り、ロボットアームは、実際の各動作につき追加学習を行い、精度の向上を図るものである。なお、ここでは、初期角度と目標角度を入力として出力トルクを予測する構成としたが、本開示はそのような学習構成に限定されない。従って、他の組み合わせの入出力構成を採用してもよいことは勿論である。
<1.2.4 統合処理ステップ>
図4に戻り、各動作装置3における個別の追加学習処理(S30)が終了すると、各動作装置3から追加学習済モデルに関するデータ、すなわち、ノードとパラメータに関するデータをネットワークを介して統合処理サーバ2へと送信する処理が行われる(S40)。統合処理サーバ2は、当該データを受信すると、各追加学習済モデル同士を統合する処理を行う(S50)。
図4に戻り、各動作装置3における個別の追加学習処理(S30)が終了すると、各動作装置3から追加学習済モデルに関するデータ、すなわち、ノードとパラメータに関するデータをネットワークを介して統合処理サーバ2へと送信する処理が行われる(S40)。統合処理サーバ2は、当該データを受信すると、各追加学習済モデル同士を統合する処理を行う(S50)。
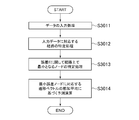
図9は、統合処理(S50)に関する詳細フローチャートである。処理が開始すると、学習済モデルを生成する際に生成されたパラメータファイルが、2つの異なる学習済モデルについて、読み出される(S501)。このパラメータファイルに基づいて学習区間が一致又はおよそ一致するか否かを判定し(S502)、一致しない場合には(S502NO)、ユーザに対して図示しないディスプレイなど介して統合を行うことが出来ない旨を通知するエラーメッセージを出力し(S505)、続けて、すべての学習木同士の統合処理が完了したか否かを判定する(S506)。一方、この学習空間が一致又はおよそ一致する場合には、2つの学習済モデルのノードに関するデータファイルの読み出しが行われる(S503)。その後、後述する2つの異なる学習済モデルに係る学習木の統合処理が行われた後(S504)、すべての学習木同士の統合処理が完了したか否かが判定される(S506)。すべての学習木同士の統合処理が完了していないと判定された場合(S506NO)、別の学習木の組み合わせで統合処理がなされる(S506NO)。一方、すべての学習木同士の統合処理が完了したと判定された場合(S506YES)、処理は終了する。なお、ここで、学習空間のおよその一致とは、例えば、一方の学習済モデルに含まれるデータの最大値・最小値に所定割合(例えば、10%程度)の余裕を持たせた範囲内に、他の学習済モデルに含まれるデータの最大値・最小値が含まれることをいう。
図10は、統合処理(S504)に関する詳細フローチャートである。処理が開始すると、第1番目のノード位置を着目位置として設定する(S5041)。次に、着目位置において、いずれの学習木においてもノードが存在するかについての判定処理を行う(S5042)。着目位置において、いずれの学習木においてもノードが存在する場合には(S5042YES)、当該2つのノードの統合処理を行う(S5043)。
ここで、本実施形態に係るノードの統合処理の態様について説明する。図12は、ノードの統合処理(S5043)に関する概念図である。図12(a)は、上方左右の2つの着色されたノードを下方の1つの着色されたノードへと統合する場合の第1の統合例である。同図において、Eは前述の誤差を表し、Cはこれまでに包含したデータ数を表している。上方左側のノードの誤差Eはα(>0)、データ数Cはk(0以上の整数)であり、上方右側のノードの誤差Eはβ(>0)、データ数Cはm(0以上の整数)である。これらのノードを統合する際、各ノードに対応付けられたデータは1つのノードに対応付けられるように統合される。また、統合後の誤差Eは、上述の各誤差αとβとを各データ数k及びmを用いて重み付け加算することにより算出される。さらに、統合後のデータ数Cは各データ数k及びmを足し合わせることにより算出される。
このような構成によれば、ノード同士の統合は包含されるデータ数に応じて重み付け加算を行うことにより行われるので、データ数に基づく信頼性に応じた学習関連パラメータの統合を行うことができる。
図12(b)は、上方左右の2つの着色されたノードを下方の1つの着色されたノードへと統合する場合の第2の統合例である。上方左側のノードの誤差Eはα(>0)、データ数Cはn(0以上の整数)であり、上方右側のノードの誤差Eは∞、データ数Cは1である。ここで、誤差Eが∞となっているのは、当該ノードに対応付けられたデータ数が未だ1個であり、誤差が定義されていないことから便宜的に付与された値である。これらのノードを統合する際、各ノードに対応付けられたデータは1つのノードに対応付けられるように統合される。また、統合後の誤差Eは、上述の各誤差αと∞とに基づき、αとして算出される。さらに、統合後のデータ数Cは各データ数n及び1を足し合わせることによりn+1として算出される。
なお、本実施形態においては、ノードの統合処理を行う上で、各ノードに対応付けられる各データ、誤差E、及びデータ数Cが統合の対象となるものとしたが、統合の対象はこれらのパラメータに限定されるものではない。従って、ノードの統合に際して、ノードへと対応付けられた他のパラメータを統合の対象としてもよいことは勿論である。
図10に戻り、ノードの統合処理(S5043)が完了すると、統合後のノードが記憶部へと記憶される(S5044)。その後、全てのノード位置が処理されたか否かの判定処理が行われる(S5045)。
一方、着目位置において、いずれの学習木においてもノードが存在する場合でない場合(S5042NO)、次に、いずれか一方の学習木においてノードが存在するか否かの判定処理が行われる(S5047)。いずれの学習木においてもノードが存在しない場合(S5047NO)、その後何らの処理も行わずに、続けてすべてのノード位置が処理されたか否かの判定処理が行われる(S5047NO)。いずれか一方の学習木の着目位置においてノードが存在する場合(S5047YES)、存在する一方の学習木のデータの着目ノード以下のノードを統合後のデータとして複製・保存する(S5048)。その後、全てのノード位置が処理されたか否かの判定処理が行われる(S5045)。
このような構成によれば、あるノードが一方の学習済モデルのみに存在する場合には当該ノード以下のノードについても当該一方の学習済モデルにのみに存在することを利用して、効率的な統合処理を行うことができる。
すべてのノード位置について処理が行われた場合(S5045YES)、処理は終了する。一方、未だすべてのノード位置について処理が行われていない場合(S5045NO)、着目位置を所定の次のノード位置へと変更設定する処理が行われ(S5046)、再び、ノードの統合処理(S5043)、或いは一方のノードの複製処理(S5048)等が行われる。なお、このとき、上位のノード位置から順に着目位置の設定(深さ優先探索)が行われる。これは、一方の学習木のみにノードが存在する場合に(S5047YES)、着目ノード以下のノードの複製を行うことから(S5048)、上位のノード位置から探索を行った方が効率的なためである。
図11は、学習木の統合に関する概念図である。同図から明らかな通り、同図左上の第1の学習木と、同図右上の第2の学習木とを統合すると、同図下段に示されるように、黒色のノードについては統合処理が行われ、一方、白色のノードについては第1の学習木又は第2の学習木のノードが複製されることとなる。
このような構成によれば、木構造を基本とした学習モデル同士の統合であるので、ニューラルネットワーク等と比べて容易な統合処理が可能となる。
また、このような構成によれば、追加学習を行った多数の動作装置3から統合処理サーバ2へと各個別学習済モデルを集約して統合できるので、その種の動作装置に汎用的に使用できる学習済モデルを生成することができる。
<1.2.5 ダウンロードステップ>
図4に戻り、統合処理サーバ2における学習済モデルの統合処理(S50)が終了すると、統合処理サーバ2から統合済モデル(汎用学習済モデル)をネットワークを介して各動作装置3へとダウンロードする処理が行われる(S60)。具体的には、所定期間経過後、動作装置3の所有者等は、図示しないパーソナル・コンピュータ等の情報処理装置へと統合済モデルをダウンロードし、当該情報処理装置からI/O部45を介して当該統合済モデルを各動作装置3へと転送して動作装置3の各記憶部42へと記憶させる。その後、処理は終了する。
図4に戻り、統合処理サーバ2における学習済モデルの統合処理(S50)が終了すると、統合処理サーバ2から統合済モデル(汎用学習済モデル)をネットワークを介して各動作装置3へとダウンロードする処理が行われる(S60)。具体的には、所定期間経過後、動作装置3の所有者等は、図示しないパーソナル・コンピュータ等の情報処理装置へと統合済モデルをダウンロードし、当該情報処理装置からI/O部45を介して当該統合済モデルを各動作装置3へと転送して動作装置3の各記憶部42へと記憶させる。その後、処理は終了する。
このような構成によれば、様々な動作装置3の特性を学習した統合済モデルを用いてより精度良く動作装置3の制御を行うことができる。また、動作装置3の所有者は、既に搭載されている学習済モデルを使用するか、又は、統合済モデルを使用するかを選択することもできる。
なお、本実施形態においては、動作装置3の所有者等が統合済モデルを図示しないパーソナル・コンピュータ等の情報処理装置へと一旦ダウンロードする構成としたが、本開示はそのような構成に限定されない。従って、例えば、動作装置3の所有者等が動作装置3へとダウンロード指令を行い、それにより、動作装置3が通信部43を介して最新の統合済モデルをダウンロードするような構成としてもよい。
<2.第2の実施形態>
次に、図13~図16を参照しつつ、本発明の第2の実施形態について説明する。本実施形態においては、学習済モデル同士の統合処理を行う際に種々の付随情報が使用される。
次に、図13~図16を参照しつつ、本発明の第2の実施形態について説明する。本実施形態においては、学習済モデル同士の統合処理を行う際に種々の付随情報が使用される。
図13は、本実施形態に係る汎用学習済モデル生成システム100の全体構成図である。同図から明らかな通り、汎用学習済モデル生成システム100は、第1の情報処理装置101と、第2の情報処理装置102と、情報処理端末103とを、インターネット等のネットワークを介して接続することにより構成されている。各装置は互いに通信を介して情報のやり取りを行う。
第1の情報処理装置101は、後述の通り、主に学習処理を担当し、初期学習や学習済モデルの統合処理などを行う。第2の情報処理装置102は、アプリケーションサーバとして機能し、例えば、所定のアプリケーションプログラムの情報処理端末103への提供処理や所定のサーバ側の処理等を担い、また、第1の情報処理装置101及び情報処理端末3と情報の通信を行う。情報処理端末103は、スマートフォンやタブレットコンピュータ等の情報処理装置であり、第2の情報処理端末102から所定のアプリケーションプログラムをダウンロードすることができる。情報処理端末103は、第2の情報処理装置102と協働して、ユーザへと所定のアプリケーションを提供する。情報処理端末103は、Bluetooth(登録商標)等の規格によりペアリング可能なウェアラブル端末104と接続されている。ウェアラブル端末104は血圧、心拍数、体温、歩数等のセンシングを行う種々のセンサを備えており、取得されたセンサ情報は、情報処理端末3へと送信される。なお、各装置の装置構成は、図2に示した構成と略同一であるのでここでは記載を省略する。
ここで、アプリケーションプログラムの内容として種々の例が考え得るものの、本実施形態においては、ウェアラブル端末104から取得された各種のセンサ情報を入力として、ウェアラブル端末104のユーザの所定の病気リスク等を予測するアプリケーションプログラムである。センサから取得された情報には、血圧、心拍数、体温等のバイタルサイン情報と歩数等の活動量情報が含まれる。
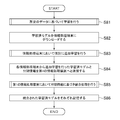
図14は、本実施形態に係る、汎用学習済モデル生成に関するゼネラルフローチャートである。
処理が開始すると、第1の情報処理装置101において、実施形態1と同様の木構造を有する学習モデルを用いて初期学習が行われる(S81)。学習処理の詳細は図5及び図6と略同一であるのでその詳細に関する説明は省略する。
ただし、本実施形態における学習処理は、血圧、心拍数、体温等のバイタル情報と歩数等の活動量情報を入力とし、実際の様々なユーザの病気情報(各種の数値、診断結果、健康状態に関する評価など)を教師データとして、教師あり学習を行うことにより行われる。すなわち、学習処理により、バイタル情報と活動量情報とに基づいて、ユーザにおいて予測される病気リスク等の病気情報を出力する学習済モデルを得ることができる。
第1の情報処理装置101において生成された学習済モデルは、情報処理端末103上で実行されるアプリケーションソフトウェアを介して各情報処理端末103へとダウンロードされる(S82)。なお、アプリケーションサーバとして機能する情報処理端末102からの指令に応じて各情報処理端末103へとダウンロードされてもよい。
このとき、情報処理端末103は、アプリケーションプログラムにより、ユーザに関する付随情報の入力を受け付け、内部の記憶部へと記憶している。付随情報とは、例えば、年齢、性別又は住んでいる地域に関する情報等である。
その後、各情報処理端末103では、個別に追加学習が行われる(S83)。追加学習処理の詳細は図7及び図8に示したものと略同一であるのでその詳細に関する説明は省略する。ただし、本実施形態における追加学習処理においては、実際の動作データとして、アプリケーションソフトウェアを介して入力される各ユーザの実際の病気情報が用いられる。また、動作終了(S303)は、例えば、所定の期間の経過により判定される。
所定の期間が経過すると、追加学習済の学習済モデルと当該学習済モデルを送信するユーザに関する付随情報とが、第1の情報処理装置101へと送信される(S84)。
追加学習済の学習済モデルと付随情報とを受信すると、第1の情報処理装置101は、付随情報に基づき学習済モデル同士を統合する処理を行う(S85)。
統合処理の詳細は図9~図12に示したものと略同一であるのでその詳細に関する説明は省略する。ただし、本実施形態における統合処理においては、図9に示す統合処理の前段に、統合対象となる学習済モデルを選択する処理が行われる。
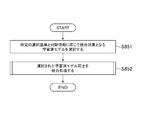
図15は、統合する学習済モデルの選択処理に関するフローチャートである。同図から明らかな通り、処理が開始すると、第1の情報処理装置101は、所定の選択基準と受信した付随情報に応じて統合対象となる学習済モデルを選択する(S851)。ここで、所定の選択基準は、予め第1の情報処理装置101に記憶され又は他の装置や端末により設定された選択基準であり、その内容は、例えば、住んでいる地域情報等であってもよい。すなわち、第1の情報処理装置101は、例えば、住んでいる地域が同一のユーザに係る学習済モデルのみを選択する処理を行う。
その後、選択された学習済モデルを適宜統合する処理を行って複数の汎用学習済モデルを得る(S852)。すなわち、各汎用学習済モデルは、同一の地域に居住するユーザに関する学習済モデルをそれぞれ統合したものになる。なお、統合する処理は、図9に示したものと略同一であるので、その説明は省略する。
図16は、付随情報に基づく統合処理(S85)の概念図である。同図においては、木構造を有する複数の学習済モデルが上下2段に配置されている。下段(第1階層)は、各情報処理端末103において個別に追加学習がなされた複数の学習済モデル110-1~110-N(Nは2以上の自然数)である。上段(第2階層)は、下段の学習済モデル110-1~110-Nを統合することにより生成された木構造を有する複数の学習済モデル120-1~120-M(Mは2以上の自然数)である。同図から明らかな通り、例えば、所定の選択基準が住んでいる地域である場合には、同じ地域に住んでいるユーザから得られた下段の複数の学習済モデルに基づいて、複数の学習済モデル同士を統合して上段(第2階層)に示す木構造を有する複数の学習済モデルが生成されることとなる。
図14に戻り、統合処理(S85)が終了すると、統合された各学習済モデルを記憶する処理が行われ、処理は終了する(S86)。なお、記憶された各学習済モデルは、その後、各情報処理端末103へとダウンロード可能なように構成されてもよい。また、記憶された各学習済モデルは、第2の情報処理装置へと送信されてもよい。なお、この際、付随情報に応じて対応する学習済モデルをダウンロード可能なように構成してもよい。例えば、自らと同一地域に住んでいる者に適した予測モデル(学習済モデル)をダウンロードするといった構成としてもよい。
このような構成によれば、所定の選択基準と付随情報に基づいて、追加学習済モデルを統合するので、付随情報が共通する学習済モデルを統合した汎用学習済モデルを生成することができる。これにより、特定の用途やユーザに適した学習済モデルを生成することができる。
<3.変形例>
第1の実施形態においては、動作装置3から追加学習後の学習済モデルを送信することとして説明したが、本開示はそのような構成に限定されない。従って、例えば、動作装置3から動作データを統合処理サーバ2へと送信して統合処理サーバ2において当該動作データを学習することで統合を実現してもよい。
第1の実施形態においては、動作装置3から追加学習後の学習済モデルを送信することとして説明したが、本開示はそのような構成に限定されない。従って、例えば、動作装置3から動作データを統合処理サーバ2へと送信して統合処理サーバ2において当該動作データを学習することで統合を実現してもよい。
上述の実施形態においては、追加学習後の学習済モデルの送信のタイミングについて特段限定していないものの、その送信のタイミングは、ある程度の追加学習が進行した後であってもよいし、逐次的なものであってもよい。
上述の実施形態においては、ネットワーク上の統合処理サーバ2へと情報を集約するものとしたが、例えば、ネットワークと接続されたPLC(プログラマブル・ロジック・コントローラ)等に集約してもよい。
第1の実施形態においては、動作装置3としてロボットアームを例示したが、このような動作装置に限定されない。従って、例えば、センサ機器、携帯電話、自動車、ドローン、AIスピーカ、船舶、海上フロート、トンネル掘削シールド、建設重機、鉄道、EV、空調、コンプレッサー、工場機械、家庭用ロボット、核融合制御、PLC、通信ゲートウェイ、スマートハウス、ウェアラブル端末、家電、メーター各種(電気水道ガスなど)、ゲーム機等、様々な動作装置に適用可能である。なお、本開示における動作は、装置の機械的な動作のみに限定されるものではなく、例えば、装置における電気的又は電磁的な動作等も含むものである。
第1の実施形態においては、事前に学習を行った学習済モデルを集積回路4へと搭載し、当該集積回路4を動作装置3へと組み込みその後に個別に追加学習させる構成としたが、本開示はそのような構成に限定されない。従って、例えば、情報処理装置1上にて事前学習を行って学習済モデルを生成した後、当該学習済モデルを直接又は間接に各動作装置3へとダウンロードし、当該ダウンロードした学習済モデルに基づいて各動作装置3において追加学習を行ってもよい。
第1の実施形態においては、情報処理装置1と統合処理サーバ2とは別々の構成として示したが一体であってもよい。また、一部の機能を独立してもよいし、分散的な処理を行ってもよい。
第1の実施形態における集積回路4は、FPGA(Field-Programmable Gate Array)等で構成してもよい。
第2の実施形態においては、図16に示したように付随情報に基づく統合処理を2段階で行う構成として説明した。しかしながら、本発明はそのような構成に限定されない。従って、例えば、多段階で統合を行い、そのそれぞれを記憶しておき、情報処理端末103等からのリクエストに応じて適切な統合済の学習済モデルを提供するような構成としてもよい。
図17は、付随情報を用いて行われる多段階の統合処理の概念図である。最下段は、個別の情報処理端末103において追加学習することにより得られた学習済モデル130-1~130-Nから成る第1階層130を示している。中段は、直下の階層の学習済モデルを統合処理することにより得られた学習済モデル140-1~140-Mから成る第2階層140を示している。そして、最上段は、直下の階層の学習済モデルを統合処理することにより得られた学習済モデル150-1~150-Lから成る第K階層150を示している。同図に示すように、付随情報に基づいて多段階的な統合処理を行ってもよい。例えば、第2階層では第1階層の学習済モデルを地域情報等に基づいて統合し、第3階層ではより広域な観点で地域情報に基づいて統合処理を行ってもよい。また、その他の階層では、性別や年齢情報等を基準として段階的に統合処理を行ってもよい。
このような構成によれば、必要に応じて情報処理端末103や第2の情報処理装置102に対して適切な統合済の学習済モデルを提供することができる。
上述の実施形態においては、学習モデルとして木構造を用いた学習モデルを採用したがこのような手法に限定されない。従って、統合可能な他の学習モデルを採用することができる。
汎用学習済モデルの生成システムを製造等する産業にて利用可能である。
1 情報処理装置
2 統合処理サーバ
3 動作装置
4 集積回路
5 汎用学習済モデル生成システム
100 汎用学習済モデル生成システム
101 第1の情報処理装置
102 第2の情報処理装置
103 情報処理端末
104 ウェアラブル端末
2 統合処理サーバ
3 動作装置
4 集積回路
5 汎用学習済モデル生成システム
100 汎用学習済モデル生成システム
101 第1の情報処理装置
102 第2の情報処理装置
103 情報処理端末
104 ウェアラブル端末
Claims (10)
- 所定の機械学習モデルについて所定の初期データに基づいて学習を行って初期学習済モデルを生成する、初期学習ステップと、
所定の動作装置の制御を行う前記初期学習済モデルを複数の前記動作装置へと組み込み、かつ、各前記動作装置を夫々動作させることにより得られた個別の動作データに基づいて夫々追加学習を行って得られた複数の個別学習済モデルを統合処理して汎用学習済モデルを得る、統合ステップと、を備える汎用学習済モデルの生成方法。 - 前記初期学習済モデルの生成は、ネットワークと接続された所定の初期学習サーバにおいて行われ、
前記初期学習済モデルの前記動作装置への組み込みは、前記初期学習サーバから前記ネットワークを介して各前記動作装置へとダウンロードすることにより行われる、請求項1に記載の汎用学習済モデルの生成方法。 - 前記初期学習済モデルの前記動作装置への組み込みは、前記初期学習済モデルを集積回路へと搭載し、当該集積回路を各前記動作装置へと組み込むことにより行われる、請求項1に記載の汎用学習済モデルの生成方法。
- 前記汎用学習済モデルの生成方法は、さらに、
前記汎用学習済モデルを各前記動作装置へと組み込む、再組込ステップ、を含む請求項1に記載の汎用学習済モデルの生成方法。 - 前記機械学習モデルは、階層的に分割された状態空間へとそれぞれ対応付けられた複数のノードを階層的に配置することにより構成された木構造を有する学習モデルである、請求項1に記載の汎用学習済モデルの生成方法。
- 前記集積回路は、所定の統合処理サーバとの通信を行う通信部を備え、
前記個別学習済モデルは、各前記動作装置から各前記通信部を介して前記統合処理サーバへと送信され、
前記統合処理は、前記統合処理サーバにおいて実行される、請求項1に記載の汎用学習済モデルの生成方法。 - 前記初期データは、テスト用の前記動作装置又は前記動作装置のシミュレーションに基づいて生成されたデータである、請求項1に記載の汎用学習済モデルの生成方法。
- 前記統合ステップは、さらに、
各前記個別学習済モデルに対応する付随情報に基づいて、前記個別学習済モデルを選択的に統合処理する選択的統合ステップを備える、請求項1に記載の汎用学習済モデルの生成方法。 - 所定の機械学習モデルについて所定の初期データに基づいて学習を行って初期学習済モデルを生成する、初期学習ステップと、
所定の動作装置の制御を行う前記初期学習済モデルを複数の前記動作装置へと組み込む、組込ステップと、
各前記動作装置を夫々動作させることにより得られた個別の動作データに基づいて夫々追加学習を行って複数の個別学習済モデルを生成する追加学習ステップと、
各前記個別学習済モデルを統合処理して汎用学習済モデルを得る、統合ステップと、
前記汎用学習済モデルを各前記動作装置へと再度組み込む、再組込ステップと、
を備える汎用学習済モデルの生成方法。 - 所定の機械学習モデルについて所定の初期データに基づいて学習を行って初期学習済モデルを生成する、初期学習部と、
所定の動作装置の制御を行う前記初期学習済モデルを複数の前記動作装置へと組み込み、かつ、各前記動作装置を夫々動作させることにより得られた個別の動作データに基づいて夫々追加学習を行って得られた複数の個別学習済モデルを統合処理して汎用学習済モデルを得る、統合部と、を備える汎用学習済モデルの生成システム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019541374A JP6648352B2 (ja) | 2017-12-26 | 2018-12-21 | 汎用学習済モデルの生成方法 |
| US16/957,130 US11568327B2 (en) | 2017-12-26 | 2018-12-21 | Method for generating universal learned model |
| EP18895583.5A EP3734519A4 (en) | 2017-12-26 | 2018-12-21 | PROCESS FOR GENERATING A UNIVERSAL LEARNED MODEL |
| US18/087,873 US20230131283A1 (en) | 2017-12-26 | 2022-12-23 | Method for generating universal learned model |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017249455 | 2017-12-26 | ||
| JP2017-249455 | 2017-12-26 |
Related Child Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US16/957,130 A-371-Of-International US11568327B2 (en) | 2017-12-26 | 2018-12-21 | Method for generating universal learned model |
| US18/087,873 Continuation US20230131283A1 (en) | 2017-12-26 | 2022-12-23 | Method for generating universal learned model |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019131527A1 true WO2019131527A1 (ja) | 2019-07-04 |
Family
ID=67067347
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/047297 Ceased WO2019131527A1 (ja) | 2017-12-26 | 2018-12-21 | 汎用学習済モデルの生成方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (2) | US11568327B2 (ja) |
| EP (1) | EP3734519A4 (ja) |
| JP (4) | JP6648352B2 (ja) |
| WO (1) | WO2019131527A1 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021015254A1 (ja) * | 2019-07-22 | 2021-01-28 | 株式会社安川電機 | 拡張モジュール、産業用機器、及び推定方法 |
| JPWO2021033288A1 (ja) * | 2019-08-21 | 2021-02-25 | ||
| JP2021177347A (ja) * | 2020-05-08 | 2021-11-11 | 長瀬産業株式会社 | バーチャル疾患体験システム、バーチャル疾患体験方法、及びプログラム |
| WO2022190518A1 (ja) * | 2021-03-12 | 2022-09-15 | オムロン株式会社 | 統合モデルの生成方法、画像検査システム、画像検査用モデルの生成装置、画像検査用モデルの生成プログラム及び画像検査装置 |
| WO2023013788A1 (ja) * | 2021-08-05 | 2023-02-09 | 京セラ株式会社 | 学習済みモデル管理装置及び学習済みモデル管理方法 |
| EP4020337A4 (en) * | 2019-08-21 | 2023-08-02 | Aising Ltd. | INFORMATION PROCESSING DEVICE, METHOD AND PROGRAM |
| JP2023535851A (ja) * | 2020-08-05 | 2023-08-22 | 新智数字科技有限公司 | プライバシー保護によるデータ処理モデルの取得方法、装置、ターミナル機器及び記憶媒体 |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3734519A4 (en) * | 2017-12-26 | 2021-09-15 | Aising Ltd. | PROCESS FOR GENERATING A UNIVERSAL LEARNED MODEL |
| JP6699764B1 (ja) * | 2019-01-16 | 2020-05-27 | 株式会社富士通ゼネラル | 空気調和システム |
| JP7308466B2 (ja) * | 2019-03-27 | 2023-07-14 | パナソニックIpマネジメント株式会社 | 情報処理システム、情報処理方法、及び、プログラム |
| JP7461763B2 (ja) * | 2020-03-18 | 2024-04-04 | セコム株式会社 | 分散機械学習装置、分散機械学習方法、分散機械学習プログラム及びデータ処理システム |
| JP7476958B2 (ja) * | 2020-06-09 | 2024-05-01 | 日本電気株式会社 | 機械学習システム、クライアント、機械学習方法及びプログラム |
| JP6963062B1 (ja) * | 2020-06-22 | 2021-11-05 | 株式会社Yamato | 情報処理装置及び情報処理方法 |
| US12346808B2 (en) * | 2020-08-06 | 2025-07-01 | Nec Corporation | Federated learning for anomaly detection |
| CN114120083B (zh) * | 2020-08-12 | 2025-08-26 | 东芝泰格有限公司 | 图像识别装置及存储介质、图像识别方法 |
| US20240312657A1 (en) * | 2021-07-08 | 2024-09-19 | Deepmind Technologies Limited | Controlling a magnetic field of a magnetic confinement device using a neural network |
| JP7838642B2 (ja) * | 2022-06-01 | 2026-04-01 | 日本電気株式会社 | データ処理装置、データ処理システム、データ処理方法およびプログラム |
| WO2023234184A1 (ja) * | 2022-06-01 | 2023-12-07 | 日本電気株式会社 | 連合学習モデル生成装置、連合学習モデル生成システム、連合学習モデル生成方法、コンピュータ可読媒体および連合学習モデル |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006293442A (ja) * | 2005-04-05 | 2006-10-26 | Sony Corp | 情報処理装置および方法、並びにプログラム |
| JP2016173686A (ja) | 2015-03-16 | 2016-09-29 | 国立大学法人岩手大学 | 情報処理装置 |
| JP2017520068A (ja) * | 2014-05-23 | 2017-07-20 | データロボット, インコーポレイテッド | 予測データ分析のためのシステムおよび技術 |
| WO2017126482A1 (ja) * | 2016-01-19 | 2017-07-27 | 日本電気株式会社 | 情報処理装置、情報処理方法、及び、記録媒体 |
| WO2017187516A1 (ja) * | 2016-04-26 | 2017-11-02 | 株式会社日立製作所 | 情報処理システムおよびその運用方法 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5123759B2 (ja) * | 2008-06-30 | 2013-01-23 | キヤノン株式会社 | パターン検出器の学習装置、学習方法及びプログラム |
| JP4710932B2 (ja) * | 2008-07-09 | 2011-06-29 | ソニー株式会社 | 学習装置、学習方法、およびプログラム |
| US20150242760A1 (en) * | 2014-02-21 | 2015-08-27 | Microsoft Corporation | Personalized Machine Learning System |
| US9681270B2 (en) * | 2014-06-20 | 2017-06-13 | Opentv, Inc. | Device localization based on a learning model |
| US20170178024A1 (en) * | 2015-12-22 | 2017-06-22 | Luis S. Kida | Unsupervised personalization service based on subject similarity modeling |
| US10599205B2 (en) * | 2017-09-18 | 2020-03-24 | Verizon Patent And Licensing Inc. | Methods and systems for managing machine learning involving mobile devices |
| EP3734519A4 (en) * | 2017-12-26 | 2021-09-15 | Aising Ltd. | PROCESS FOR GENERATING A UNIVERSAL LEARNED MODEL |
| US10901969B2 (en) * | 2018-08-14 | 2021-01-26 | Development Guild DDI, Inc. | System and method for facilitating an objective-oriented data structure and an objective via the data structure |
| US11475370B2 (en) * | 2018-11-29 | 2022-10-18 | Microsoft Technology Licensing, Llc | Providing custom machine-learning models |
-
2018
- 2018-12-21 EP EP18895583.5A patent/EP3734519A4/en active Pending
- 2018-12-21 WO PCT/JP2018/047297 patent/WO2019131527A1/ja not_active Ceased
- 2018-12-21 US US16/957,130 patent/US11568327B2/en active Active
- 2018-12-21 JP JP2019541374A patent/JP6648352B2/ja active Active
-
2019
- 2019-11-07 JP JP2019202438A patent/JP7264376B2/ja active Active
-
2022
- 2022-12-23 US US18/087,873 patent/US20230131283A1/en active Pending
-
2023
- 2023-03-29 JP JP2023053246A patent/JP7510637B2/ja active Active
-
2024
- 2024-06-13 JP JP2024095617A patent/JP7623054B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006293442A (ja) * | 2005-04-05 | 2006-10-26 | Sony Corp | 情報処理装置および方法、並びにプログラム |
| JP2017520068A (ja) * | 2014-05-23 | 2017-07-20 | データロボット, インコーポレイテッド | 予測データ分析のためのシステムおよび技術 |
| JP2016173686A (ja) | 2015-03-16 | 2016-09-29 | 国立大学法人岩手大学 | 情報処理装置 |
| WO2017126482A1 (ja) * | 2016-01-19 | 2017-07-27 | 日本電気株式会社 | 情報処理装置、情報処理方法、及び、記録媒体 |
| WO2017187516A1 (ja) * | 2016-04-26 | 2017-11-02 | 株式会社日立製作所 | 情報処理システムおよびその運用方法 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3734519A4 |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021018627A (ja) * | 2019-07-22 | 2021-02-15 | 株式会社安川電機 | 拡張モジュール、産業用機器、産業用機器のパラメータ又は前記産業用機器により制御される機器の内部状態の推定方法及び推定システム |
| WO2021015254A1 (ja) * | 2019-07-22 | 2021-01-28 | 株式会社安川電機 | 拡張モジュール、産業用機器、及び推定方法 |
| EP4020337A4 (en) * | 2019-08-21 | 2023-08-02 | Aising Ltd. | INFORMATION PROCESSING DEVICE, METHOD AND PROGRAM |
| JPWO2021033288A1 (ja) * | 2019-08-21 | 2021-02-25 | ||
| US12585985B2 (en) | 2019-08-21 | 2026-03-24 | Nec Corporation | Recognition system, model processing apparatus, model processing method, and recording medium for integrating models in recognition processing |
| JP7235125B2 (ja) | 2019-08-21 | 2023-03-08 | 日本電気株式会社 | 認識システム、モデル処理装置、モデル処理方法、及び、プログラム |
| JP2021177347A (ja) * | 2020-05-08 | 2021-11-11 | 長瀬産業株式会社 | バーチャル疾患体験システム、バーチャル疾患体験方法、及びプログラム |
| WO2021225028A1 (ja) * | 2020-05-08 | 2021-11-11 | 長瀬産業株式会社 | バーチャル疾患体験システム、バーチャル疾患体験方法、及びプログラム |
| JP7635219B2 (ja) | 2020-08-05 | 2025-02-25 | 新智数字科技有限公司 | プライバシー保護によるデータ処理モデルの取得方法、装置、ターミナル機器及び記憶媒体 |
| JP2023535851A (ja) * | 2020-08-05 | 2023-08-22 | 新智数字科技有限公司 | プライバシー保護によるデータ処理モデルの取得方法、装置、ターミナル機器及び記憶媒体 |
| CN116917909A (zh) * | 2021-03-12 | 2023-10-20 | 欧姆龙株式会社 | 整合模型的生成方法、图像检查系统、图像检查用模型的生成装置、图像检查用模型的生成程序和图像检查装置 |
| US20240233349A9 (en) * | 2021-03-12 | 2024-07-11 | Omron Corporation | Integrated model generation method, image inspection system, image inspection model generation device, image inspection model generation program, and image inspection device |
| JP7559633B2 (ja) | 2021-03-12 | 2024-10-02 | オムロン株式会社 | 統合モデルの生成方法、画像検査システム、画像検査用モデルの生成装置、画像検査用モデルの生成プログラム及び画像検査装置 |
| JP2022139417A (ja) * | 2021-03-12 | 2022-09-26 | オムロン株式会社 | 統合モデルの生成方法、画像検査システム、画像検査用モデルの生成装置、画像検査用モデルの生成プログラム及び画像検査装置 |
| WO2022190518A1 (ja) * | 2021-03-12 | 2022-09-15 | オムロン株式会社 | 統合モデルの生成方法、画像検査システム、画像検査用モデルの生成装置、画像検査用モデルの生成プログラム及び画像検査装置 |
| JPWO2023013788A1 (ja) * | 2021-08-05 | 2023-02-09 | ||
| WO2023013788A1 (ja) * | 2021-08-05 | 2023-02-09 | 京セラ株式会社 | 学習済みモデル管理装置及び学習済みモデル管理方法 |
| JP7640710B2 (ja) | 2021-08-05 | 2025-03-05 | 京セラ株式会社 | 学習済みモデル管理装置及び学習済みモデル管理方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3734519A4 (en) | 2021-09-15 |
| JP2020038699A (ja) | 2020-03-12 |
| US20200349473A1 (en) | 2020-11-05 |
| JP2025061095A (ja) | 2025-04-10 |
| US11568327B2 (en) | 2023-01-31 |
| JP7510637B2 (ja) | 2024-07-04 |
| JP6648352B2 (ja) | 2020-02-14 |
| JP2024119955A (ja) | 2024-09-03 |
| US20230131283A1 (en) | 2023-04-27 |
| JP2023089023A (ja) | 2023-06-27 |
| JP7623054B2 (ja) | 2025-01-28 |
| JP7264376B2 (ja) | 2023-04-25 |
| JPWO2019131527A1 (ja) | 2020-01-16 |
| EP3734519A1 (en) | 2020-11-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7510637B2 (ja) | 汎用学習済モデルの生成方法 | |
| US9613310B2 (en) | Neural network learning and collaboration apparatus and methods | |
| US12175212B2 (en) | System and method for using a graphical user interface to develop a virtual programmable logic controller | |
| US20170357910A1 (en) | System for iteratively training an artificial intelligence using cloud-based metrics | |
| CN112823492B (zh) | 用于为网络提供端到端解决方案的系统、设备和方法 | |
| US20200122039A1 (en) | Method and system for a behavior generator using deep learning and an auto planner | |
| EP3596662B1 (en) | Imagination-based agent neural networks | |
| US20250014148A1 (en) | Method and system for generating composite image | |
| KR102561799B1 (ko) | 디바이스에서 딥러닝 모델의 레이턴시를 예측하는 방법 및 시스템 | |
| US20220222927A1 (en) | Apparatus, system, and method of generating a multi-model machine learning (ml) architecture | |
| JP2020035000A (ja) | 機械学習システムおよびボルツマンマシンの計算方法 | |
| JP7853682B2 (ja) | 汎用学習済モデルの生成方法 | |
| CN114676471B (zh) | 火星车的任务规划模型建立方法、装置、电子设备及介质 | |
| US11436391B2 (en) | Learning method and automatic layout design method | |
| CN111712791B (zh) | 人工智能应用搭建中新增组块的方法、装置和机器设备 | |
| KR102834344B1 (ko) | 복층 지식 그래프 임베딩 방법 및 그 시스템 | |
| KR20230021468A (ko) | 신경망을 이용하여 사용자 입력에 대응하는 시각적 객체의 상태를 식별하기 위한 전자 장치, 방법, 및 비일시적 컴퓨터 판독가능 저장 매체 | |
| JPWO2019026703A1 (ja) | 学習済モデル統合方法、装置、プログラム、icチップ、及びシステム | |
| JP6886853B2 (ja) | 情報処理装置、情報処理方法及び情報処理プログラム | |
| Thongpull | Advancing the automated design of integrated intelligent multi-sensory systems with self-X properties | |
| HK40069947B (en) | Skinning processing method of virtual objects, device, equipment, medium and program product | |
| HK40069947A (en) | Skinning processing method of virtual objects, device, equipment, medium and program product | |
| CN119578590A (zh) | 一种机器学习方法、装置、计算机设备及存储介质 | |
| WO2021247831A1 (en) | Automated knowledge extraction and representation for complex engineering systems |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| ENP | Entry into the national phase |
Ref document number: 2019541374 Country of ref document: JP Kind code of ref document: A |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18895583 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2018895583 Country of ref document: EP Effective date: 20200727 |