WO2019189904A1 - イントラ予測装置、画像符号化装置、画像復号装置、及びプログラム - Google Patents
イントラ予測装置、画像符号化装置、画像復号装置、及びプログラム Download PDFInfo
- Publication number
- WO2019189904A1 WO2019189904A1 PCT/JP2019/014366 JP2019014366W WO2019189904A1 WO 2019189904 A1 WO2019189904 A1 WO 2019189904A1 JP 2019014366 W JP2019014366 W JP 2019014366W WO 2019189904 A1 WO2019189904 A1 WO 2019189904A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- pixel
- prediction
- intra prediction
- unit
- filter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images










Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/11—Selection of coding mode or of prediction mode among a plurality of spatial predictive coding modes
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/105—Selection of the reference unit for prediction within a chosen coding or prediction mode, e.g. adaptive choice of position and number of pixels used for prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/117—Filters, e.g. for pre-processing or post-processing
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/119—Adaptive subdivision aspects, e.g. subdivision of a picture into rectangular or non-rectangular coding blocks
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/157—Assigned coding mode, i.e. the coding mode being predefined or preselected to be further used for selection of another element or parameter
- H04N19/159—Prediction type, e.g. intra-frame, inter-frame or bidirectional frame prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/167—Position within a video image, e.g. region of interest [ROI]
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/176—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a block, e.g. a macroblock
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/182—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being a pixel
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/593—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving spatial prediction techniques
Definitions
- the present invention relates to an intra prediction device, an image encoding device, an image decoding device, and a program.
- Non-Patent Document 1 intra prediction using spatial correlation in a frame is used (for example, Non-Patent Document 1).
- the encoding device side is optimized from 35 prediction modes of Planar prediction, DC prediction, and directionality prediction. The mode is selected and the information is sent to the decoding device side.
- JEM intra-prediction performance evaluation software
- JEM intra-prediction performance evaluation software
- JEM intra-prediction performance evaluation software
- a 4-tap interpolation filter is used in directional prediction, and one prediction pixel is generated from four prediction reference pixels.
- the type of filter to be applied is determined according to the block size of the target block, and a predicted pixel is generated using a bicubic filter for a block size of a certain size or smaller, and a Gaussian filter for other blocks.
- intra prediction originally uses a steep filter when generating a predicted pixel at a pixel position close to a reference pixel, and uses a gentle filter when generating a predicted pixel at a pixel position away from the reference pixel. Should.
- an object of the present invention is to provide an intra prediction device, an image encoding device, an image decoding device, and a program capable of increasing the prediction accuracy of intra prediction.
- the intra prediction apparatus performs intra prediction on each block obtained by dividing a frame-by-frame image constituting a moving image.
- the intra prediction apparatus includes a filter determination unit that determines a filter to be used for generating a prediction pixel from a plurality of types of filters for each pixel position in one target block that is a target of the intra prediction, and the filter determination unit. And a prediction pixel generation unit that generates the prediction pixel from reference pixels around the one target block using the filter determined by the above.
- the filter determination unit determines the filter corresponding to one pixel position in the one target block
- the filter determination unit determines whether the reference pixel position closest to the one pixel position is between the one pixel position and the one pixel position.
- the filter is determined according to the distance.
- the intra prediction apparatus performs intra prediction on each block obtained by dividing a frame-by-frame image constituting a moving image.
- the intra prediction apparatus includes a reference pixel number determination unit that determines the number of prediction reference pixels used for generation of a prediction pixel, and a reference pixel number determination unit among reference pixels around a block that is a target of the intra prediction.
- a prediction pixel generation unit that generates the prediction pixel by applying a filter to the determined number of prediction reference pixels.
- the reference pixel number determination unit determines the number of prediction reference pixels for each block to be subjected to the intra prediction or for each pixel position in the block to be subjected to the intra prediction.
- the image encoding device includes the intra prediction device according to the first feature or the second feature.
- the image decoding device includes the intra prediction device according to the first feature or the second feature.
- the program according to the fifth feature causes the computer to function as an intra prediction device according to the first feature or the second feature.
- an intra prediction device it is possible to provide an intra prediction device, an image encoding device, an image decoding device, and a program that can improve the prediction accuracy of intra prediction.
- the image encoding device and the image decoding device according to the embodiment will be described with reference to the drawings.
- the image encoding device and the image decoding device according to the embodiment encode and decode a moving image represented by MPEG.
- MPEG moving image represented by MPEG.
- FIG. 1 is a diagram illustrating a configuration of an image encoding device 1 according to the present embodiment.
- the image encoding device 1 includes a block dividing unit 100, a subtracting unit 110, a transforming unit 121, a quantizing unit 122, an entropy coding unit 130, an inverse quantization unit 141, An inverse conversion unit 142, a synthesis unit 150, a memory 160, an intra prediction unit (intra prediction device) 170, an inter prediction unit 180, and a switching unit 190 are provided.
- the block dividing unit 100 divides an input image in units of frames (or pictures) into block-like small areas, and outputs the blocks obtained by the division to the subtracting unit 110.
- the block size is, for example, 32 ⁇ 32 pixels, 16 ⁇ 16 pixels, 8 ⁇ 8 pixels, or 4 ⁇ 4 pixels.
- the shape of the block is not limited to a square, but may be a rectangle.
- a block is a unit in which the image encoding apparatus 1 performs encoding and a unit in which the image decoding apparatus 2 performs decoding, and may be referred to as an encoding unit (CU).
- the subtraction unit 110 calculates a prediction residual indicating a difference in units of pixels between the block input from the block dividing unit 100 and a predicted image (predicted block) corresponding to the block. Specifically, the subtraction unit 110 calculates a prediction residual by subtracting each pixel value of the predicted image from each pixel value of the block, and outputs the calculated prediction residual to the conversion unit 121.
- the predicted image is input to the subtracting unit 110 from the switching unit 190 described later.
- the transform unit 121 and the quantization unit 122 constitute a transform / quantization unit 120 that performs orthogonal transform processing and quantization processing in units of blocks.
- the transform unit 121 performs orthogonal transform on the prediction residual input from the subtraction unit 110 to calculate a transform coefficient, and outputs the calculated transform coefficient to the quantization unit 122.
- the orthogonal transform refers to, for example, discrete cosine transform (DCT: Discrete Cosine Transform), discrete sine transform (DST: Discrete Sine Transform), Karhunen Reeve transform (KLT: Karhunen? Loeve Transform), and the like.
- the quantization unit 122 quantizes the transform coefficient input from the transform unit 121 using a quantization parameter (Qp) and a quantization matrix, and generates a quantized transform coefficient.
- the quantization parameter (Qp) is a parameter that is commonly applied to each transform coefficient in the block, and is a parameter that determines the roughness of quantization.
- the quantization matrix is a matrix having a quantization value at the time of quantizing each transform coefficient as an element.
- the quantization unit 122 outputs the generated quantized transform coefficient information and the like to the entropy encoding unit 130 and the inverse quantization unit 141.
- the entropy encoding unit 130 performs entropy encoding on the quantized transform coefficient input from the quantization unit 122, performs data compression, generates encoded data (bit stream), and converts the encoded data into an image code. Output to the outside of the converter 1.
- Huffman code Context-based Adaptive Binary Arithmetic Coding
- CABAC Context-based Adaptive Binary Arithmetic Coding
- the entropy coding unit 130 receives information related to prediction from the intra prediction unit 170 and the inter prediction unit 180.
- the entropy encoding unit 130 also performs entropy encoding of these pieces of information.
- the inverse quantization unit 141 and the inverse transform unit 142 constitute an inverse quantization / inverse transform unit 140 that performs an inverse quantization process and an inverse orthogonal transform process in units of blocks.
- the inverse quantization unit 141 performs an inverse quantization process corresponding to the quantization process performed by the quantization unit 122. Specifically, the inverse quantization unit 141 restores the transform coefficient by inversely quantizing the quantized transform coefficient input from the quantization unit 122 using the quantization parameter (Qp) and the quantization matrix. Then, the restored transform coefficient is output to the inverse transform unit 142.
- Qp quantization parameter
- the inverse transform unit 142 performs an inverse orthogonal transform process corresponding to the orthogonal transform process performed by the transform unit 121. For example, when the transform unit 121 performs discrete cosine transform, the inverse transform unit 142 performs inverse discrete cosine transform. The inverse transform unit 142 performs inverse orthogonal transform on the transform coefficient input from the inverse quantization unit 141 to restore the prediction residual, and outputs the restored prediction residual that is the restored prediction residual to the synthesis unit 150 To do.
- the synthesizing unit 150 synthesizes the restored prediction residual input from the inverse transform unit 142 with the predicted image input from the switching unit 190 in units of pixels.
- the synthesizing unit 150 adds each pixel value of the restored prediction residual and each pixel value of the predicted image to reconstruct (decode) the block, and outputs a reconstructed block, which is a reconstructed block, to the memory 160.
- Such a reconstructed block may be referred to as a decoded block.
- the memory 160 stores the reconstructed block input from the synthesis unit 150.
- the memory 160 stores the reconstructed block in units of frames.
- the intra prediction unit 170 refers to the decoded adjacent block adjacent to the prediction target block among the reconstructed blocks (decoded blocks) stored in the memory 160, and generates an intra predicted image. In addition, the intra prediction unit 170 selects an optimal intra prediction mode, and performs intra prediction using the selected intra prediction mode. A plurality of intra prediction modes corresponding to a plurality of prediction directions are defined in advance.
- the prediction direction refers to a direction of an adjacent reference pixel based on the target pixel when the target pixel in the target block is predicted with reference to an adjacent pixel adjacent to the target block. That is, adjacent reference pixels to be used for prediction of pixels in the target block are determined by the intra prediction mode (prediction direction).
- the intra prediction unit 170 outputs the intra prediction image to the switching unit 190 and outputs information on the selected intra prediction mode to the entropy encoding unit 130.
- the inter prediction unit 180 performs inter prediction that predicts a target block using a reconstructed image (decoded image) in units of frames stored in the memory 160 as a reference image. Specifically, the inter prediction unit 180 calculates a motion vector by a technique such as block matching, and generates an inter prediction image based on the motion vector. The inter prediction unit 180 selects an optimal inter prediction method from inter prediction using a plurality of reference images (typically, bi-prediction) and inter prediction using one reference image (one-way prediction), Inter prediction is performed using the selected inter prediction method. The inter prediction unit 180 outputs the generated inter prediction image to the switching unit 190 and outputs information on the selected inter prediction method and motion vector to the entropy encoding unit 130.
- a technique such as block matching
- the switching unit 190 switches between the intra prediction image input from the intra prediction unit 170 and the inter prediction image input from the inter prediction unit 180, and outputs one of the prediction images to the subtraction unit 110 and the synthesis unit 150.
- FIG. 2 is a diagram illustrating a configuration of the image decoding device 2 according to the present embodiment.
- the image decoding device 2 includes an entropy code decoding unit 200, an inverse quantization unit 211, an inverse transform unit 212, a synthesis unit 220, a memory 230, an intra prediction unit 240, and an inter prediction.
- Unit 250 and switching unit 260 are examples of the image decoding device 2 according to the present embodiment.
- the entropy code decoding unit 200 decodes the encoded data generated by the encoding device 1 and outputs the quantized transform coefficient to the inverse quantization unit 211. Also, the entropy code decoding unit 200 decodes the encoded data, acquires information related to prediction (intra prediction and inter prediction), and outputs information related to prediction to the intra prediction unit 240 and the inter prediction unit 250. Specifically, the entropy code decoding unit 200 outputs information on the intra prediction mode to the intra prediction unit 240 and outputs information on the inter prediction method and the motion vector to the inter prediction unit 250.
- the inverse quantization unit 211 and the inverse transform unit 212 constitute an inverse quantization / inverse transform unit 210 that performs an inverse quantization process and an inverse orthogonal transform process in units of blocks.
- the inverse quantization unit 211 performs an inverse quantization process corresponding to the quantization process performed by the quantization unit 122 of the image encoding device 1.
- the inverse quantization unit 211 restores and restores the transform coefficient by inversely quantizing the quantized transform coefficient input from the entropy code decoding unit 200 using the quantization parameter (Qp) and the quantization matrix.
- the transform coefficient is output to the inverse transform unit 212.
- the inverse transform unit 212 performs an inverse orthogonal transform process corresponding to the orthogonal transform process performed by the transform unit 121 of the image encoding device 1.
- the inverse transform unit 212 performs inverse orthogonal transform on the transform coefficient input from the inverse quantization unit 211 to restore the prediction residual, and outputs the restored prediction residual (restored prediction residual) to the synthesis unit 220. To do.
- the synthesizing unit 220 reconstructs (decodes) the original block by synthesizing the prediction residual input from the inverse transform unit 212 and the predicted image input from the switching unit 260 in units of pixels.
- the block is output to the memory 230.
- the memory 230 stores the reconstructed block input from the synthesis unit 220.
- the memory 230 stores the reconstructed block in units of frames.
- the memory 230 outputs a reconstructed image (decoded image) in units of frames to the outside of the image decoding device 2.
- the intra prediction unit 240 refers to the reconstructed block stored in the memory 230 and generates an intra prediction image by performing intra prediction according to the intra prediction information (intra prediction mode) input from the entropy code decoding unit 200. Specifically, the intra prediction unit 240 generates an intra predicted image with reference to adjacent reference pixels determined according to the intra prediction mode among the reconstructed blocks (decoded blocks) stored in the memory 230. The intra prediction unit 240 outputs the intra predicted image to the switching unit 260.
- intra prediction information intra prediction information
- intra prediction unit 240 generates an intra predicted image with reference to adjacent reference pixels determined according to the intra prediction mode among the reconstructed blocks (decoded blocks) stored in the memory 230.
- the intra prediction unit 240 outputs the intra predicted image to the switching unit 260.
- the inter prediction unit 250 performs inter prediction that predicts a block using a reconstructed image (decoded image) in units of frames stored in the memory 160 as a reference image.
- the inter prediction unit 250 generates an inter prediction image by performing inter prediction according to the inter prediction information (such as motion vector information) input from the entropy code decoding unit 200, and outputs the inter prediction image to the switching unit 260.
- the inter prediction information such as motion vector information
- the switching unit 260 switches between the intra prediction image input from the intra prediction unit 240 and the inter prediction image input from the inter prediction unit 250, and outputs one of the prediction images to the synthesis unit 220.
- FIG. 3 is a diagram illustrating a configuration of the intra prediction unit 170 of the image encoding device 1 according to the present embodiment.
- the intra prediction unit 240 of the image decoding device 2 has the same configuration as the intra prediction unit 170 of the image encoding device 1 and performs the same operation.
- the intra prediction unit 170 performs intra prediction on each block obtained by dividing an original image in units of frames constituting a moving image.
- a target block one block that is the target of intra prediction is referred to as a target block.
- the intra prediction unit 170 includes a prediction mode selection unit 171, a filter determination unit 172A, and a prediction pixel generation unit 173.
- the prediction mode selection unit 171 selects an intra prediction mode to be applied to the target block, and outputs the selected intra prediction mode to the filter determination unit 172A and the prediction pixel generation unit 173. Further, the information on the intra prediction mode selected by the prediction mode selection unit 171 is also output to the entropy encoding unit 130 and encoded by the entropy encoding unit 130.
- the image decoding device 2 decodes the information of the intra prediction mode, and selects the same intra prediction mode as that of the image encoding device 1.
- FIG. 4 is a diagram illustrating an example of an intra prediction mode that can be applied to a target block. In the example of FIG. 4, 67 intra prediction modes from 0 to 66 are shown.
- the intra prediction mode “0” is Planar prediction
- the intra prediction mode “1” is DC prediction
- the intra prediction modes “2” to “66” are directional prediction.
- the prediction mode selection unit 171 selects an optimal intra prediction mode based on, for example, RD (Rate Distortion) cost.
- RD Red Distortion
- directionality prediction the direction of the arrow indicates the prediction direction
- the starting point of the arrow indicates the position of the prediction target pixel
- the end point of the arrow indicates the position of the reference pixel used for prediction of the prediction target pixel.
- a prediction value is determined by applying an interpolation filter to a plurality of reference pixels.
- the filter determination unit 172A When the intra prediction mode selected by the prediction mode selection unit 171 is a predetermined directional prediction and the reference pixel is not an integer pixel position, the filter determination unit 172A performs the prediction pixel for each pixel position in the target block.
- a filter (interpolation filter) to be used for generation of is determined from a plurality of types of filters. Specifically, the filter determination unit 172A determines that the filter is to be applied when there is no reference pixel at an integer position on a straight line extending from the pixel position of the prediction target pixel in the intra prediction direction.
- the predetermined directionality prediction means directionality prediction that requires interpolation of reference pixels.
- mode “18” vertical direction
- mode “50” 45-degree oblique direction
- modes “2”, “34”, “66” etc.
- the filter determination unit 172A determines that the filter is not applied when there is a reference pixel at an integer position on a straight line extending in the intra prediction direction, and applies the filter otherwise. Judge that. Hereinafter, the description will be made assuming that the filter determination unit 172A determines to apply the filter.
- the filter is a 4-tap interpolation filter.
- the filter is used to generate one prediction pixel from four prediction reference pixels for the prediction target pixel.
- the prediction reference pixel refers to a reference pixel (that is, a reference pixel to which a filter is applied) used for prediction of the target pixel among adjacent reference pixels on the left and upper sides of the target block.
- the filter since the filter is a 4-tap interpolation filter, the number of prediction reference pixels is four.
- multiple types of filters are filters with different filter characteristics.
- the plurality of types of filters include, for example, a bicubic filter and a Gaussian filter.
- the bicubic filter is a steep filter
- the Gaussian filter is a gentle filter.
- the filter determining unit 172A determines a filter corresponding to one pixel position in the target block, the position of the reference pixel closest to the one pixel position and the one pixel position are determined. The filter is determined according to the distance between them. In this way, the filter determination unit 172A determines a filter for each pixel position in the target block, so that the filter can be appropriately used in units of pixels in the target block.
- a filter corresponding to one pixel position in order to determine the filter according to the distance between the position of the reference pixel closest to the one pixel position and the one pixel position, for example, A steep filter can be used when generating a predicted pixel at a pixel position close to the reference pixel, and a gentle filter can be used when generating a predicted pixel at a pixel position away from the reference pixel. Thereby, the prediction precision of intra prediction can be improved.
- the prediction pixel generation unit 173 generates a prediction pixel from the prediction reference pixel using the filter determined by the filter determination unit 172A for each pixel position in the target block.
- FIG. 5 is a diagram illustrating an example of a predicted pixel generation method using a filter. In FIG. 5, it is assumed that the block size of the target block is 4 ⁇ 4, and a predicted pixel is generated for the pixel position (coordinate position) in the second row and the third column.
- the prediction pixel generation unit 173 generates a prediction pixel by applying a filter to four prediction reference pixels # 1 to # 4 among the upper reference pixels of the target block. When prediction pixels are generated for all pixel positions in the target block in this way, the prediction pixel generation unit 173 outputs a block including the generated prediction pixels as an intra prediction image.
- the filter determination unit 172A includes a reference pixel determination unit 172a, a distance calculation unit 172b, a threshold setting unit 172c, and a comparison determination unit 172d.
- the reference pixel determining unit 172a determines the closest reference pixel (that is, a reference pixel used for calculating the distance) for each pixel position in the target block. Specifically, the reference pixel determination unit 172a determines the reference pixel on the upper side of the target block and the left side as the reference pixel closest to the pixel position of the prediction target pixel according to the intra prediction mode selected by the prediction mode selection unit 171. Which reference pixel to use is determined. Although the prediction reference pixel used for intra prediction changes according to the intra prediction mode, the distance can be appropriately calculated by determining the reference pixel for obtaining the distance according to the intra prediction mode.
- the reference pixel determining unit 172a determines the left reference pixel when the intra prediction mode is “2” to “34”, and determines the upper reference pixel when the intra prediction mode is “35” to “66”. .
- the reference pixel determination unit 172a outputs the determined position (coordinates) of the reference pixel to the distance calculation unit 172b.
- the distance calculation unit 172b calculates the distance between the position of the reference pixel determined by the reference pixel determination unit 172a and the position of the target pixel, and outputs the calculated distance to the comparison determination unit 172d.
- the threshold setting unit 172c sets one or a plurality of thresholds to be compared with the distance according to the intra prediction mode selected by the prediction mode selection unit 171. Specifically, the threshold setting unit 172c holds a mapping table in which an intra prediction mode and a threshold are associated with each other, and sets a threshold corresponding to the intra prediction mode using the mapping table.
- the prediction reference pixel used for intra prediction changes according to the intra prediction mode, and the distance between the prediction reference pixel and the target pixel also changes accordingly, but the filter is set by setting a threshold according to the intra prediction mode. Can be determined appropriately. In the present embodiment, a case where there is one threshold will be described, but a plurality of thresholds may be provided.
- the threshold setting unit 172c outputs the threshold to be set to the comparison determination unit 172d.
- the comparison determination unit 172d determines the filter corresponding to the target pixel by comparing the distance calculated by the distance calculation unit 172b with the threshold set by the threshold setting unit 172c, and the determined filter is used as the prediction pixel generation unit. To 173. For example, the comparison determination unit 172d determines the filter 1 for the target pixel whose distance is equal to or smaller than the threshold, and determines the filter 2 for the target pixel whose distance exceeds the threshold.
- the filter 1 is a steeper filter than the filter 2.
- the filter 1 may be a bicubic filter, and the filter 2 may be a Gaussian filter.
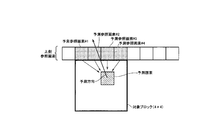
- FIG. 6 is a diagram illustrating an example of the operation of the filter determination unit 172A.
- the block size of the target block is 8 ⁇ 8.
- the reference pixel determination unit 172a calculates the distance because the intra prediction mode selected by the prediction mode selection unit 171 is within the range of “35” to “66”. An upper reference pixel is determined as a reference pixel for this purpose. Further, the threshold setting unit 172c sets a threshold to be compared with the distance according to the intra prediction mode selected by the prediction mode selection unit 171. Here, the description will be made assuming that the threshold set by the threshold setting unit 172c is “4”.
- the distance calculation unit 172b calculates the distance between each pixel position in the target block and the upper reference pixel determined by the reference pixel determination unit 172a. For example, the distance calculation unit 172b calculates the distance “1” for each pixel position in the first row in the target block, and calculates the distance “2” for each pixel position in the second row in the target block. For each pixel position in the third row in the target block, the distance is calculated as “3”. For each pixel position in the fourth row in the target block, the distance is calculated as “4”. For each pixel position in the fifth row, the distance is calculated as “5”, for each pixel position in the sixth row in the target block, the distance is calculated as “6”, and each pixel in the seventh row in the target block. For the position, the distance is calculated as “7”, and for each pixel position in the eighth row in the target block, the distance is calculated as “8”.
- the comparison determination unit 172d determines a filter for each pixel position in the target block by comparing the distance calculated by the distance calculation unit 172b with the threshold set by the threshold setting unit 172c. Since the threshold set by the threshold setting unit 172c is “4”, the distance from the upper reference pixel is equal to or smaller than the threshold for each pixel position in the first to fourth rows in the target block. Therefore, the comparison determination unit 172d determines a filter 1 (for example, a bicubic filter) for each pixel position in the first to fourth rows in the target block. On the other hand, for each pixel position in the 5th to 8th rows in the target block, the distance from the upper reference pixel exceeds the threshold value. Therefore, the comparison determination unit 172d determines a filter 2 (for example, a Gaussian filter) for each pixel position in the fifth to eighth rows in the target block.
- a filter 1 for example, a bicubic filter
- FIG. 7 is a diagram illustrating an example of an operation flow of the intra prediction unit 170 of the image encoding device 1 according to the present embodiment.
- step S101 the prediction mode selection unit 171 selects an intra prediction mode to be applied to the target block.
- step S102 the reference pixel determining unit 172a determines a reference pixel to be used for calculating the distance for each pixel position in the target block, according to the intra prediction mode selected by the prediction mode selecting unit 171.
- step S103 the distance calculation unit 172b calculates the distance between the position of the reference pixel determined by the reference pixel determination unit 172a and the position of the target pixel.
- step S104 the threshold setting unit 172c sets a threshold to be compared with the distance according to the intra prediction mode selected by the prediction mode selection unit 171.
- step S105 the comparison determination unit 172d compares the distance calculated by the distance calculation unit 172b with the threshold set by the threshold setting unit 172c.
- step S106 the comparison determination unit 172d determines a filter corresponding to the target pixel according to the comparison result between the distance and the threshold.
- step S107 the prediction pixel generation unit 173 generates a prediction pixel from the prediction reference pixel using the filter determined by the filter determination unit 172A.
- the intra prediction unit 170 (prediction pixel generation unit 173) outputs an intra prediction image corresponding to the target block.
- step S108 when the generation of all the prediction pixels in the target block has not been completed yet (step S108: NO), the processing is shifted to the next prediction target pixel in the target block (step S109), and the next prediction target pixel is determined.
- the distance is calculated (step S103), the distance is compared with the threshold (step S105), the filter is determined (step S106), and the prediction pixel is generated (step S106).
- the distance calculation unit 172b calculates the distance between the prediction target pixel and the reference pixel, the horizontal distance between the prediction target pixel and the left reference pixel, or the prediction It was assumed that the vertical distance between the target pixel and the upper reference pixel was calculated. In such a case, the reference pixel used for calculating the distance may not be a prediction reference pixel (that is, a reference pixel actually used for prediction).
- a prediction reference pixel (that is, a reference pixel that is actually used for prediction) is used as a reference pixel that is used for calculating a distance.
- the reference pixel determining unit 172a uses a reference pixel corresponding to an intersection of a reference pixel sequence including a plurality of prediction reference pixels and a line segment extended from the position of the prediction target pixel in the prediction direction of the intra prediction mode. , And determined as a reference pixel used for distance calculation. Then, the distance calculation unit 172b calculates the distance between the position of the reference pixel determined by the reference pixel determination unit 172a and the prediction target pixel.
- the filter can be appropriately determined by calculating the distance from the reference pixel that is actually used for prediction.
- FIG. 8 is a diagram illustrating an example of the operation of the filter determination unit 172A according to the present modification example.
- the block size of the target block is 8 ⁇ 8.
- the reference pixel determining unit 172a extends in the prediction direction of the intra prediction mode from the position of the reference pixel sequence including a plurality of prediction reference pixels (prediction reference pixels # 1 to # 4) and the prediction target pixel.
- the reference pixel corresponding to the intersection with the line segment is determined as the reference pixel used for calculating the distance.
- the reference pixel determining unit 172a determines the predicted reference pixel # 2 as a reference pixel used for calculating the distance. Also in this modification example, the threshold setting unit 172c sets a threshold to be compared with the distance according to the intra prediction mode. Here, it is assumed that the threshold set by the threshold setting unit 172c is “4”.
- the reference pixel determining unit 172a determines the predicted reference pixel # 3 as a reference pixel used for calculating the distance. Also in this modification example, the threshold setting unit 172c sets a threshold to be compared with the distance according to the intra prediction mode. Here, it is assumed that the threshold set by the threshold setting unit 172c is “3”.
- Second Embodiment> The second embodiment will be described mainly with respect to differences from the first embodiment.
- the first embodiment is an embodiment for determining the type of filter for generating a prediction pixel on the assumption that the filter is a 4-tap interpolation filter.
- the second embodiment is an embodiment for determining the number of filter taps (that is, the number of prediction reference pixels) while fixing the type of filter.
- FIG. 9 is a diagram illustrating a configuration of the intra prediction unit 170 of the image encoding device 1 according to the present embodiment.
- the intra prediction unit 240 of the image decoding device 2 has the same configuration as the intra prediction unit 170 of the image encoding device 1 and performs the same operation.
- the intra prediction unit 170 includes a prediction mode selection unit 171, a reference pixel number determination unit 172 ⁇ / b> B, and a prediction pixel generation unit 173.
- the prediction mode selection unit 171 is the same as in the first embodiment.
- the reference pixel number determination unit 172B determines the number of prediction reference pixels (the number of filter taps) used to generate a prediction pixel. The reference pixel number determination unit 172B determines the number of prediction reference pixels for each pixel position in the target block to be subjected to intra prediction.
- the prediction pixel generation unit 173 applies a filter to the number of prediction reference pixels determined by the reference pixel number determination unit 172B from the reference pixels around the block that is the target of intra prediction, thereby obtaining a prediction pixel. Generate.
- the prediction accuracy of intra prediction can be improved by making it possible to change the number of prediction reference pixels used for generating a prediction pixel in units of blocks or in units of pixels. Moreover, even if there is only one type of filter, the filter characteristics can be changed depending on the number of predicted reference pixels.
- the reference pixel number determination unit 172B determines the number of prediction reference pixels corresponding to one pixel position (prediction target pixel) in a block to be subjected to intra prediction
- the one pixel position The number of predicted reference pixels is determined according to the distance between the position of the reference pixel closest to the one pixel position and the one pixel position.
- the filter since the filter is determined for each pixel position in one block, the filter can be properly used in units of pixels in the target block. For example, when generating a predicted pixel at a pixel position close to the reference pixel, the number of predicted reference pixels is reduced, and when generating a predicted pixel at a pixel position away from the reference pixel, the number of predicted reference pixels is increased. Thus, an appropriate filter characteristic can be obtained.
- the reference pixel number determination unit 172B includes a reference pixel determination unit 172a, a distance calculation unit 172b, a threshold setting unit 172c, and a comparison determination unit 172d.
- Each of the reference pixel determining unit 172a, the distance calculating unit 172b, and the threshold setting unit 172c performs the same operation as that of the first embodiment or the modification example thereof.
- the comparison determination unit 172d determines the number of prediction target pixels corresponding to the target pixel by comparing the distance calculated by the distance calculation unit 172b with the threshold set by the threshold setting unit 172c, and the determined prediction target pixel The number is output to the prediction pixel generation unit 173. For example, the comparison determination unit 172d determines the prediction target pixel number A for the target pixel whose distance is equal to or less than the threshold, and determines the prediction target pixel number B for the target pixel whose distance exceeds the threshold. The predicted pixel number A is smaller than the predicted pixel number B. For example, the prediction target pixel number A is “4”, and the prediction target pixel number A is “5” or “6”.
- FIG. 10 is a diagram illustrating an example of an operation flow of the intra prediction unit 170 of the image encoding device 1 according to the present embodiment.
- step S201 the prediction mode selection part 171 selects the intra prediction mode applied to an object block.
- step S202 the reference pixel determining unit 172a determines a reference pixel to be used for calculating the distance for each pixel position in the target block according to the intra prediction mode selected by the prediction mode selecting unit 171.
- step S203 the distance calculation unit 172b calculates the distance between the position of the reference pixel determined by the reference pixel determination unit 172a and the position of the target pixel.
- step S204 the threshold value setting unit 172c sets a threshold value to be compared with the distance according to the intra prediction mode selected by the prediction mode selection unit 171.
- step S205 the comparison determination unit 172d compares the distance calculated by the distance calculation unit 172b with the threshold set by the threshold setting unit 172c.
- step S206 the comparison determination unit 172d determines the number of prediction reference pixels (the number of filter taps) corresponding to the target pixel according to the comparison result between the distance and the threshold.
- step S207 the prediction pixel generation unit 173 generates a prediction pixel from the number of prediction reference pixels determined by the filter determination unit 172A.
- the intra prediction unit 170 (prediction pixel generation unit 173) outputs an intra prediction image corresponding to the target block.
- step S208 when the generation of all the prediction pixels in the target block has not been completed yet (step S208: NO), the process moves to the next prediction target pixel in the target block (step S209), and the next prediction target pixel is determined.
- the distance is calculated (step S203), the distance is compared with the threshold (step S205), the filter is determined (step S206), and the prediction pixel is generated (step S206).
- the reference pixel number determination unit 172B determines the number of prediction reference pixels according to the distance from the reference pixel for each pixel position in the target block to be subjected to intra prediction. .
- the reference pixel number determination unit 172B determines the prediction reference according to the block size of the target block when determining the number of prediction reference pixels corresponding to the target block to be subjected to intra prediction. Determine the number of pixels. For example, appropriate filter characteristics can be obtained by reducing the number of predicted reference pixels when the block size is small and increasing the number of predicted reference pixels when the block size is large.
- the block size may define the length of the target block in the vertical direction ⁇ the length in the horizontal direction, or may define one of the length in the vertical direction or the length in the horizontal direction.
- either the length in the vertical direction or the length in the horizontal direction may be switched.
- the reference pixel number determination unit 172B for example, when the intra prediction mode is “2” to “34”, The length in the direction is used as the block size.
- the intra prediction mode is “35” to “66”
- the length in the vertical direction is used as the block size.
- FIG. 11 is a diagram illustrating an example of an operation flow of the intra prediction unit 170 of the image encoding device 1 according to this modification.
- step S301 the prediction mode selection part 171 selects the intra prediction mode applied to an object block.
- step S302 the reference pixel number determination unit 172B acquires the block size of the target block.
- the reference pixel number determination unit 172B determines the number of prediction reference pixels (the number of filter taps) according to the block size of the target block. For example, the reference pixel number determination unit 172B compares the block size of the target block with a threshold, determines the prediction target pixel number A when the block size is equal to or smaller than the threshold, and predicts when the block size exceeds the threshold. The target pixel number B is determined.
- step S304 the prediction pixel generation unit 173 generates a prediction pixel from the number of prediction reference pixels determined by the filter determination unit 172A.
- the intra prediction unit 170 (prediction pixel generation unit 173) outputs an intra prediction image corresponding to the target block.
- step S308 when the generation of all the prediction pixels in the target block has not been completed yet (step S308: NO), the process moves to the next prediction target pixel in the target block (step S309), and the next prediction target pixel is determined. A prediction pixel is generated (step S304).
- a program that causes a computer to execute each process performed by the image encoding device 1 and a program that causes a computer to execute each process performed by the image decoding device 2 may be provided.
- the program may be recorded on a computer readable medium. If a computer-readable medium is used, a program can be installed in the computer.
- the computer-readable medium on which the program is recorded may be a non-transitory recording medium.
- the non-transitory recording medium is not particularly limited, but may be a recording medium such as a CD-ROM or a DVD-ROM.
- a circuit that executes each process performed by the image encoding device 1 may be integrated, and the image encoding device 1 may be configured as a semiconductor integrated circuit (chip set, SoC).
- a circuit that executes each process performed by the image decoding device 2 may be integrated, and the image decoding device 2 may be configured as a semiconductor integrated circuit (chip set, SoC).
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
Abstract
Description
(1.1.画像符号化装置の構成)
図1は、本実施形態に係る画像符号化装置1の構成を示す図である。図1に示すように、画像符号化装置1は、ブロック分割部100と、減算部110と、変換部121と、量子化部122と、エントロピー符号化部130と、逆量子化部141と、逆変換部142と、合成部150と、メモリ160と、イントラ予測部(イントラ予測装置)170と、インター予測部180と、切替部190とを備える。
図2は、本実施形態に係る画像復号装置2の構成を示す図である。図2に示すように、画像復号装置2は、エントロピー符号復号部200と、逆量子化部211と、逆変換部212と、合成部220と、メモリ230と、イントラ予測部240と、インター予測部250と、切替部260とを備える。
図3は、本実施形態に係る画像符号化装置1のイントラ予測部170の構成を示す図である。画像復号装置2のイントラ予測部240は、画像符号化装置1のイントラ予測部170と同様の構成を有し、かつ同様の動作を行う。
図7は、本実施形態に係る画像符号化装置1のイントラ予測部170の動作フロー例を示す図である。
上述の第1実施形態においては、距離算出部172bが、予測対象画素と参照画素との間の距離を算出する際に、予測対象画素と左側参照画素との間の水平方向の距離、又は予測対象画素と上側参照画素との間の垂直方向の距離を算出することを想定していた。かかる場合、距離の算出に用いる参照画素は、予測参照画素(すなわち、実際に予測に用いる参照画素)でなくてもよい。
第2実施形態について、第1実施形態との相違点を主として説明する。
図9は、本実施形態に係る画像符号化装置1のイントラ予測部170の構成を示す図である。画像復号装置2のイントラ予測部240は、画像符号化装置1のイントラ予測部170と同様の構成を有し、かつ同様の動作を行う。
図10は、本実施形態に係る画像符号化装置1のイントラ予測部170の動作フロー例を示す図である。
上述の第2実施形態においては、参照画素数決定部172Bが、イントラ予測の対象とする対象ブロック内の画素位置ごとに、参照画素との距離に応じて予測参照画素の数を決定していた。
上述の第1実施形態及び第2実施形態において、転写について特に触れなかった。イントラ予測モードが「34」以下の場合には対象ブロックの上側参照画素を左側に転写し、イントラ予測モードが「34」よりも大きい場合には対象ブロックの左参照画素を上側に転写してもよい。かかる転写により参照画素を垂直方向又は水平方向に直線状に並べることができるため、フィルタ処理を画一的に行うことができる。かかる転写を行う場合に、参照画素決定部172aは、上述の距離の算出に、転写後の参照画素を用いてもよい。
Claims (10)
- 動画像を構成するフレーム単位の画像を分割して得られた各ブロックに対するイントラ予測を行うイントラ予測装置であって、
前記イントラ予測の対象とする1つの対象ブロック内の画素位置ごとに、予測画素の生成に用いるフィルタを複数種類のフィルタの中から決定するフィルタ決定部と、
前記フィルタ決定部により決定された前記フィルタを用いて、前記1つの対象ブロック周辺の参照画素から前記予測画素を生成する予測画素生成部と、を備え、
前記フィルタ決定部は、前記1つの対象ブロック内の1つの画素位置に対応する前記フィルタを決定する際に、前記1つの画素位置に最も近い参照画素の位置と前記1つの画素位置との間の距離に応じて、前記フィルタを決定する、
イントラ予測装置。 - 前記1つの対象ブロックに適用するイントラ予測モードを選択する予測モード選択部をさらに備え、
前記フィルタ決定部は、
前記1つの画素位置に最も近い参照画素を決定する参照画素決定部と、
前記参照画素決定部により決定された前記参照画素の位置と前記1つの画素位置との間の距離を算出する距離算出部と、を備え、
前記参照画素決定部は、前記予測モード選択部により選択された前記イントラ予測モードに応じて、前記1つの画素位置に最も近い参照画素として、前記1つの対象ブロックの上側の参照画素及び左側の参照画素の何れを用いるか決定する、
請求項1に記載のイントラ予測装置。 - 前記フィルタ決定部は、
前記距離と比較すべき1又は複数の閾値を設定する閾値設定部と、
前記距離算出部により算出された前記距離を、前記閾値設定部により設定された前記1又は複数の閾値と比較することにより、前記1つの画素位置に対応する前記フィルタを決定する比較決定部と、をさらに備え、
前記閾値設定部は、前記予測モード選択部により選択された前記イントラ予測モードに応じて前記1又は複数の閾値を設定する、
請求項2に記載のイントラ予測装置。 - 前記予測画素生成部は、前記1つの対象ブロック周辺の参照画素のうち、前記予測モード選択部により選択された前記イントラ予測モードに応じて定められる複数の予測参照画素に対して前記フィルタを適用することにより、前記予測画素を生成し、
前記参照画素決定部は、前記複数の予測参照画素からなる参照画素列と、前記1つの画素位置から前記イントラ予測モードの予測方向へ伸ばした線分との交点に対応する参照画素を決定し、
前記距離算出部は、前記参照画素決定部により決定された前記参照画素の位置と前記1つの画素位置との間の距離を算出する、
請求項2又は3に記載のイントラ予測装置。 - 動画像を構成するフレーム単位の画像を分割して得られた各ブロックに対するイントラ予測を行うイントラ予測装置であって、
予測画素の生成に用いる予測参照画素の数を決定する参照画素数決定部と、
前記イントラ予測の対象とするブロック周辺の参照画素の中から、前記参照画素数決定部により決定された数の予測参照画素に対してフィルタを適用することにより、前記予測画素を生成する予測画素生成部と、を備え、
前記参照画素数決定部は、前記イントラ予測の対象とするブロックごとに、又は前記イントラ予測の対象とするブロック内の画素位置ごとに、前記予測参照画素の数を決定する、
イントラ予測装置。 - 前記参照画素数決定部は、前記イントラ予測の対象とするブロック内の1つの画素位置に対応する前記予測参照画素の数を決定する際に、前記1つの画素位置に最も近い参照画素の位置と前記1つの画素位置との間の距離に応じて、前記予測参照画素の数を決定する、
請求項5に記載のイントラ予測装置。 - 前記参照画素数決定部は、前記イントラ予測の対象とする1つのブロックに対応する前記予測参照画素の数を決定する際に、前記1つのブロックのブロックサイズに応じて前記予測参照画素の数を決定する、
請求項5に記載のイントラ予測装置。 - 請求項1乃至7のいずれか1項に記載のイントラ予測装置を備える、画像符号化装置。
- 請求項1乃至7のいずれか1項に記載のイントラ予測装置を備える、画像復号装置。
- コンピュータを請求項1乃至7のいずれか1項に記載のイントラ予測装置として機能させる、プログラム。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP19776140.6A EP3780603A4 (en) | 2018-03-30 | 2019-03-29 | INTRA-PREDICTION DEVICE, IMAGE CODING DEVICE, IMAGE DECODING DEVICE AND PROGRAM |
| KR1020207030322A KR20200128577A (ko) | 2018-03-30 | 2019-03-29 | 인트라 예측 장치, 화상 부호화 장치, 화상 복호 장치 및 프로그램 |
| CN201980028956.3A CN112075080A (zh) | 2018-03-30 | 2019-03-29 | 帧内预测装置、图像编码装置、图像解码装置以及程序 |
| JP2020509373A JPWO2019189904A1 (ja) | 2018-03-30 | 2019-03-29 | イントラ予測装置、画像符号化装置、画像復号装置、及びプログラム |
| US17/038,281 US20210014489A1 (en) | 2018-03-30 | 2020-09-30 | Intra prediction device, image encoding device, image decoding device and program |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018-066716 | 2018-03-30 | ||
| JP2018066716 | 2018-03-30 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US17/038,281 Continuation US20210014489A1 (en) | 2018-03-30 | 2020-09-30 | Intra prediction device, image encoding device, image decoding device and program |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019189904A1 true WO2019189904A1 (ja) | 2019-10-03 |
Family
ID=68058205
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/014366 Ceased WO2019189904A1 (ja) | 2018-03-30 | 2019-03-29 | イントラ予測装置、画像符号化装置、画像復号装置、及びプログラム |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20210014489A1 (ja) |
| EP (1) | EP3780603A4 (ja) |
| JP (2) | JPWO2019189904A1 (ja) |
| KR (1) | KR20200128577A (ja) |
| CN (1) | CN112075080A (ja) |
| WO (1) | WO2019189904A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2024133662A (ja) * | 2018-04-01 | 2024-10-02 | ビー1、インスティテュート、オブ、イメージ、テクノロジー、インコーポレイテッド | 映像符号化/復号化方法及び装置 |
| US12621431B2 (en) | 2018-04-01 | 2026-05-05 | B1 Institute Of Image Technology, Inc. | Method and apparatus for encoding/decoding image |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113508422A (zh) * | 2019-03-08 | 2021-10-15 | 松下电器(美国)知识产权公司 | 三维数据编码方法、三维数据解码方法、三维数据编码装置、以及三维数据解码装置 |
| US20220060702A1 (en) * | 2020-08-21 | 2022-02-24 | Alibaba Group Holding Limited | Systems and methods for intra prediction smoothing filter |
| CN113691810B (zh) * | 2021-07-26 | 2022-10-04 | 浙江大华技术股份有限公司 | 帧内帧间联合预测方法、编解码方法及相关设备、存储介质 |
| EP4179728A4 (en) | 2021-06-23 | 2023-12-27 | Zhejiang Dahua Technology Co., Ltd. | SYSTEMS AND METHODS FOR IMAGE PREDICTION |
| CN118742922A (zh) * | 2022-03-03 | 2024-10-01 | 松下电器(美国)知识产权公司 | 解码方法、编码方法、解码装置及编码装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012096150A1 (ja) * | 2011-01-12 | 2012-07-19 | 三菱電機株式会社 | 動画像符号化装置、動画像復号装置、動画像符号化方法及び動画像復号方法 |
| JP2013090120A (ja) * | 2011-10-18 | 2013-05-13 | Nippon Telegr & Teleph Corp <Ntt> | 画像符号化方法,画像復号方法,画像符号化装置,画像復号装置およびそれらのプログラム |
| WO2017043786A1 (ko) * | 2015-09-10 | 2017-03-16 | 엘지전자 주식회사 | 비디오 코딩 시스템에서 인트라 예측 방법 및 장치 |
| WO2017142327A1 (ko) * | 2016-02-16 | 2017-08-24 | 삼성전자 주식회사 | 인트라 예측오차의 감소를 위한 인트라 예측 방법 및 그 장치 |
| JP2018065780A (ja) | 2016-06-30 | 2018-04-26 | 花王株式会社 | 皮膚化粧料 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2006320064B2 (en) * | 2005-11-30 | 2010-09-09 | Kabushiki Kaisha Toshiba | Image encoding/image decoding method and image encoding/image decoding apparatus |
| US9258573B2 (en) * | 2010-12-07 | 2016-02-09 | Panasonic Intellectual Property Corporation Of America | Pixel adaptive intra smoothing |
| PL3879826T3 (pl) * | 2017-05-31 | 2022-12-19 | Lg Electronics Inc. | Sposób i urządzenie do wykonywania dekodowania obrazu na podstawie predykcji przestrzennej w systemie kodowania obrazu |
-
2019
- 2019-03-29 KR KR1020207030322A patent/KR20200128577A/ko not_active Ceased
- 2019-03-29 EP EP19776140.6A patent/EP3780603A4/en not_active Withdrawn
- 2019-03-29 CN CN201980028956.3A patent/CN112075080A/zh active Pending
- 2019-03-29 WO PCT/JP2019/014366 patent/WO2019189904A1/ja not_active Ceased
- 2019-03-29 JP JP2020509373A patent/JPWO2019189904A1/ja active Pending
-
2020
- 2020-09-30 US US17/038,281 patent/US20210014489A1/en not_active Abandoned
-
2021
- 2021-08-25 JP JP2021137522A patent/JP2022000953A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012096150A1 (ja) * | 2011-01-12 | 2012-07-19 | 三菱電機株式会社 | 動画像符号化装置、動画像復号装置、動画像符号化方法及び動画像復号方法 |
| JP2013090120A (ja) * | 2011-10-18 | 2013-05-13 | Nippon Telegr & Teleph Corp <Ntt> | 画像符号化方法,画像復号方法,画像符号化装置,画像復号装置およびそれらのプログラム |
| WO2017043786A1 (ko) * | 2015-09-10 | 2017-03-16 | 엘지전자 주식회사 | 비디오 코딩 시스템에서 인트라 예측 방법 및 장치 |
| WO2017142327A1 (ko) * | 2016-02-16 | 2017-08-24 | 삼성전자 주식회사 | 인트라 예측오차의 감소를 위한 인트라 예측 방법 및 그 장치 |
| JP2018065780A (ja) | 2016-06-30 | 2018-04-26 | 花王株式会社 | 皮膚化粧料 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3780603A4 |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2024133662A (ja) * | 2018-04-01 | 2024-10-02 | ビー1、インスティテュート、オブ、イメージ、テクノロジー、インコーポレイテッド | 映像符号化/復号化方法及び装置 |
| JP7815343B2 (ja) | 2018-04-01 | 2026-02-17 | ビー1、インスティテュート、オブ、イメージ、テクノロジー、インコーポレイテッド | 映像符号化/復号化方法及び装置 |
| US12574495B2 (en) | 2018-04-01 | 2026-03-10 | B1 Institute Of Image Technology, Inc. | Method and apparatus for encoding/decoding image |
| US12574496B2 (en) | 2018-04-01 | 2026-03-10 | B1 Institute Of Image Technology, Inc. | Method and apparatus for encoding/decoding image |
| US12574498B2 (en) | 2018-04-01 | 2026-03-10 | B1 Institute Of Image Technology, Inc. | Method and apparatus for encoding/decoding image |
| US12574497B2 (en) | 2018-04-01 | 2026-03-10 | B1 Institute Of Image Technology, Inc. | Method and apparatus for encoding/decoding image |
| US12581056B2 (en) | 2018-04-01 | 2026-03-17 | B1 Institute Of Image Technology, Inc. | Method and apparatus for encoding/decoding image |
| US12598289B2 (en) | 2018-04-01 | 2026-04-07 | B1 Institute Of Image Technology, Inc. | Method and apparatus for encoding/decoding image |
| US12621431B2 (en) | 2018-04-01 | 2026-05-05 | B1 Institute Of Image Technology, Inc. | Method and apparatus for encoding/decoding image |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022000953A (ja) | 2022-01-04 |
| JPWO2019189904A1 (ja) | 2021-02-12 |
| CN112075080A (zh) | 2020-12-11 |
| KR20200128577A (ko) | 2020-11-13 |
| US20210014489A1 (en) | 2021-01-14 |
| EP3780603A4 (en) | 2022-07-06 |
| EP3780603A1 (en) | 2021-02-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| AU2015213341B2 (en) | Video decoder, video encoder, video decoding method, and video encoding method | |
| JP7649886B2 (ja) | 画像符号化装置、画像復号装置、及び画像復号方法 | |
| WO2019189904A1 (ja) | イントラ予測装置、画像符号化装置、画像復号装置、及びプログラム | |
| JP7733083B2 (ja) | 予測ブロック生成装置、画像符号化装置、画像復号装置、及びプログラム | |
| JP7812892B2 (ja) | 予測装置、画像符号化装置、画像復号装置、及びプログラム | |
| JP7699266B2 (ja) | イントラ予測装置、画像復号装置、及びプログラム | |
| JP7219030B2 (ja) | 色差イントラ予測候補生成装置、画像符号化装置、画像復号装置、及びプログラム | |
| JP7686106B2 (ja) | 符号化装置、復号装置、及びプログラム | |
| JP7590510B2 (ja) | イントラ予測装置、画像符号化装置、画像復号装置、及びプログラム | |
| CN113056918B (zh) | 图像编码装置、图像解码装置及程序 | |
| CN116866574A (zh) | 帧内预测装置、图像解码装置及程序 | |
| JP2021129148A (ja) | 予測装置、符号化装置、復号装置、及びプログラム | |
| JP7531683B2 (ja) | 符号化装置、復号装置、及びプログラム | |
| JP7659103B2 (ja) | インター予測装置、画像符号化装置、画像復号装置、及びプログラム | |
| JP7444599B2 (ja) | イントラ予測装置、画像符号化装置、画像復号装置、及びプログラム | |
| JP2020053725A (ja) | 予測画像補正装置、画像符号化装置、画像復号装置、及びプログラム | |
| JP7361498B2 (ja) | イントラ予測装置、画像符号化装置、画像復号装置、及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19776140 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2020509373 Country of ref document: JP Kind code of ref document: A |
|
| ENP | Entry into the national phase |
Ref document number: 20207030322 Country of ref document: KR Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2019776140 Country of ref document: EP |
|
| WWR | Wipo information: refused in national office |
Ref document number: 1020207030322 Country of ref document: KR |