WO2020027230A1 - 積層型受光センサ及び車載撮像装置 - Google Patents
積層型受光センサ及び車載撮像装置 Download PDFInfo
- Publication number
- WO2020027230A1 WO2020027230A1 PCT/JP2019/030093 JP2019030093W WO2020027230A1 WO 2020027230 A1 WO2020027230 A1 WO 2020027230A1 JP 2019030093 W JP2019030093 W JP 2019030093W WO 2020027230 A1 WO2020027230 A1 WO 2020027230A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- substrate
- vehicle
- imaging device
- unit
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images





















Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/21—Design or setup of recognition systems or techniques; Extraction of features in feature space; Blind source separation
- G06F18/214—Generating training patterns; Bootstrap methods, e.g. bagging or boosting
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/10—Image acquisition
- G06V10/12—Details of acquisition arrangements; Constructional details thereof
- G06V10/14—Optical characteristics of the device performing the acquisition or on the illumination arrangements
- G06V10/147—Details of sensors, e.g. sensor lenses
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/764—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using classification, e.g. of video objects
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/82—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using neural networks
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
- G06V20/584—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads of vehicle lights or traffic lights
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/59—Context or environment of the image inside of a vehicle, e.g. relating to seat occupancy, driver state or inner lighting conditions
- G06V20/597—Recognising the driver's state or behaviour, e.g. attention or drowsiness
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/617—Upgrading or updating of programs or applications for camera control
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/40—Extracting pixel data from image sensors by controlling scanning circuits, e.g. by modifying the number of pixels sampled or to be sampled
- H04N25/44—Extracting pixel data from image sensors by controlling scanning circuits, e.g. by modifying the number of pixels sampled or to be sampled by partially reading an SSIS array
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
- H04N25/709—Circuitry for control of the power supply
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
- H04N25/71—Charge-coupled device [CCD] sensors; Charge-transfer registers specially adapted for CCD sensors
- H04N25/75—Circuitry for providing, modifying or processing image signals from the pixel array
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
- H04N25/79—Arrangements of circuitry being divided between different or multiple substrates, chips or circuit boards, e.g. stacked image sensors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10F—INORGANIC SEMICONDUCTOR DEVICES SENSITIVE TO INFRARED RADIATION, LIGHT, ELECTROMAGNETIC RADIATION OF SHORTER WAVELENGTH OR CORPUSCULAR RADIATION
- H10F39/00—Integrated devices, or assemblies of multiple devices, comprising at least one element covered by group H10F30/00, e.g. radiation detectors comprising photodiode arrays
- H10F39/10—Integrated devices
- H10F39/12—Image sensors
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10F—INORGANIC SEMICONDUCTOR DEVICES SENSITIVE TO INFRARED RADIATION, LIGHT, ELECTROMAGNETIC RADIATION OF SHORTER WAVELENGTH OR CORPUSCULAR RADIATION
- H10F39/00—Integrated devices, or assemblies of multiple devices, comprising at least one element covered by group H10F30/00, e.g. radiation detectors comprising photodiode arrays
- H10F39/80—Constructional details of image sensors
- H10F39/809—Constructional details of image sensors of hybrid image sensors
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10F—INORGANIC SEMICONDUCTOR DEVICES SENSITIVE TO INFRARED RADIATION, LIGHT, ELECTROMAGNETIC RADIATION OF SHORTER WAVELENGTH OR CORPUSCULAR RADIATION
- H10F39/00—Integrated devices, or assemblies of multiple devices, comprising at least one element covered by group H10F30/00, e.g. radiation detectors comprising photodiode arrays
- H10F39/80—Constructional details of image sensors
- H10F39/811—Interconnections
Definitions
- FIG. 5 is a diagram showing a layout example of the second substrate according to the second layout example.
- the DSP 14 is arranged at the center of the area where the DSP 14 and the memory 15 are arranged.
- the memory 15 is arranged so as to surround the DSP 14 from four directions.
- the layout example of the first substrate 100 may be the same as the layout example described with reference to FIG. 3 in the first layout example.
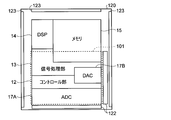
- FIG. 6 is a diagram showing a layout example of the second substrate according to the third layout example.
- the DSP 14 is arranged adjacent to the signal processing unit 13 in the same layout as the first layout example. According to such a configuration, the signal line from the signal processing unit 13 to the DSP 14 can be shortened. This makes it possible to reduce signal delay, reduce signal and power supply voltage propagation loss, improve S / N ratio, and reduce power consumption.
- FIG. 24 is a block diagram showing an example of a functional configuration of the camera head 11102 and the CCU 11201 shown in FIG.
- imaging conditions such as the frame rate, the exposure value, the magnification, and the focus may be appropriately designated by the user, or may be automatically set by the control unit 11413 of the CCU 11201 based on the acquired image signal. Good.
- a so-called AE (Auto Exposure) function, an AF (Auto Focus) function, and an AWB (Auto White Balance) function are mounted on the endoscope 11100.
- the resolution of the tile image of the upper layer is ⁇ times the resolution of the tile image of the lower layer used for the synthesis. It has become.
- the configuration described above can be applied not only to the diagnosis support system but also to all biological microscopes such as a confocal microscope, a fluorescence microscope, and a video microscope.
- the observation target may be a biological sample such as a cultured cell, a fertilized egg, or a sperm, a biological material such as a cell sheet or a three-dimensional cell tissue, or a living body such as a zebrafish or a mouse.
- the observation target object is not limited to a glass slide, and can be observed in a state stored in a well plate, a petri dish, or the like.
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Signal Processing (AREA)
- Evolutionary Computation (AREA)
- Software Systems (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Artificial Intelligence (AREA)
- Computing Systems (AREA)
- Data Mining & Analysis (AREA)
- Computer Vision & Pattern Recognition (AREA)
- General Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Databases & Information Systems (AREA)
- Medical Informatics (AREA)
- Computational Linguistics (AREA)
- Biomedical Technology (AREA)
- Biophysics (AREA)
- Molecular Biology (AREA)
- Mathematical Physics (AREA)
- Bioinformatics & Computational Biology (AREA)
- Evolutionary Biology (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Vascular Medicine (AREA)
- Solid State Image Pick-Up Elements (AREA)
Abstract
Description
1.第1の実施形態
1.1 撮像装置の概略構成例
1.2 イメージセンサチップのチップ構成例
1.3 学習済みモデルに基づく演算を実行する処理部を搭載したイメージセンサチップの課題
1.4 ノイズ低減手法
1.4.1 第1のレイアウト例
1.4.1.1 第1基板のレイアウト例
1.4.1.2 第2基板のレイアウト例
1.4.2 第2のレイアウト例
1.4.3 第3のレイアウト例
1.4.4 第4のレイアウト例
1.4.5 第5のレイアウト例
1.4.6 第6のレイアウト例
1.4.7 第7のレイアウト例
1.4.8 第8のレイアウト例
1.4.9 第9のレイアウト例
1.5 作用・効果
2.第2の実施形態
2.1 イメージセンサチップのチップ構成例
2.2 作用・効果
3.第3の実施形態
3.1 イメージセンサチップのチップ構成例
3.2 作用・効果
4.第4の実施形態
4.1 構成例
4.2 取り付け例
4.2.1 第1例
4.2.2 第2例
4.3 作用・効果
5.他のセンサへの適用
6.移動体への応用例
7.内視鏡手術システムへの応用例
8.WSI(Whole Slide Imaging)システムへの応用例
まず、第1の実施形態について、図面を参照して詳細に説明する。
図1は、第1の実施形態に係る電子機器としての撮像装置の概略構成例を示すブロック図である。図1に示すように、撮像装置1は、固体撮像装置であるイメージセンサ10と、アプリケーションプロセッサ20とを備える。イメージセンサ10は、撮像部11と、コントロール部12と、変換器(Analog to Digital Converter:以下、ADCという)17と、信号処理部13と、DSP(Digital Signal Processor)14と、メモリ15と、セレクタ(出力部ともいう)16とを備えている。
次に、図1に示すイメージセンサ10のチップ構成の例について、以下に図面を参照して詳細に説明する。
以上のように、DSP14を学習済みモデルに基づいた演算処理を実行する処理部として動作させる場合、その動作アルゴリズムの実装が、プログラムの実行による、いわゆるソフトウエア実装となる。また、学習済みモデルの動作アルゴリズムは、日々更新されている。そのため、学習済みモデルに基づいた演算処理を実行するDSP14がどのタイミングで処理を実行するかや、DSP14の処理のピークがどのタイミングになるかなどを事前に把握することは困難である。
次に、本実施形態に係る画素アレイ部101とDSP14との位置関係について、以下に図面を参照して詳細に説明する。なお、以下では、各層(第1基板100及び第2基板120)のレイアウト(フロアマップともいう)について幾つか例を挙げることで、画素アレイ部101とDSP14との位置関係を説明する。
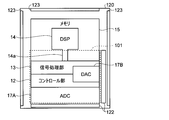
図3及び図4は、本実施形態に係る第1のレイアウト例を説明するための図である。なお、図3は、第1基板100のレイアウト例を示し、図4は、第2基板120のレイアウト例を示す。
図3に示すように、第1基板100には、図1に示すイメージセンサ10の構成において、撮像部11の画素アレイ部101が配置されている。なお、第1基板100に光学系104の一部又は全部を搭載する場合には、画素アレイ部101と対応する位置に設けられる。
一方、図4に示すように、第2基板120には、図1に示すイメージセンサ10の構成において、ADC17と、コントロール部12と、信号処理部13と、DSP14と、メモリ15とが配置されている。なお、第1のレイアウト例では、メモリ15がメモリ15Aとメモリ15Bとの2つの領域に分かれている。同様に、ADC17がADC17AとDAC(Digital to Analog Converter)17Bとの2つの領域に分かれている。DAC17Bは、ADC17AへAD変換用の参照電圧を供給する構成であり、広い意味でADC17の一部に含まれる構成である。また、図4には図示されていないが、セレクタ16も第2基板120に配置されている。
次に、第2のレイアウト例について説明する。なお、第2のレイアウト例において、第1基板100のレイアウト例は、第1のレイアウト例において図3を用いて説明したレイアウト例と同様であってよい。
次に、第3のレイアウト例について説明する。なお、第3のレイアウト例において、第1基板100のレイアウト例は、第1のレイアウト例において図3を用いて説明したレイアウト例と同様であってよい。
次に、第4のレイアウト例について説明する。なお、第4のレイアウト例において、第1基板100のレイアウト例は、第1のレイアウト例において図3を用いて説明したレイアウト例と同様であってよい。
次に、第5のレイアウト例について説明する。なお、第5のレイアウト例において、第1基板100のレイアウト例は、第1のレイアウト例において図3を用いて説明したレイアウト例と同様であってよい。
次に、第6のレイアウト例について説明する。なお、第6のレイアウト例において、第1基板100のレイアウト例は、第1のレイアウト例において図3を用いて説明したレイアウト例と同様であってよい。
次に、第7のレイアウト例について説明する。なお、第7のレイアウト例において、第1基板100のレイアウト例は、第1のレイアウト例において図3を用いて説明したレイアウト例と同様であってよい。
次に、第8のレイアウト例について説明する。なお、第8のレイアウト例において、第1基板100のレイアウト例は、第1のレイアウト例において図3を用いて説明したレイアウト例と同様であってよい。
次に、第9のレイアウト例について説明する。なお、第9のレイアウト例において、第1基板100のレイアウト例は、第1のレイアウト例において図3を用いて説明したレイアウト例と同様であってよい。
以上のように、本実施形態によれば、第2基板120のDSP14の少なくとも一部が第1基板100と第2基板120との積層方向(上下方向)において画素アレイ部101と重畳しないように、画素アレイ部101とDSP14との位置関係が調整されている。それにより、画素アレイ部101へのDSP14の信号処理に起因したノイズの入り込みを低減することが可能となるため、DSP14を学習済みモデルに基づいた演算を実行する処理部として動作させた場合でも、品質の劣化が低減された画像を取得することが可能となる。
次に、第2の実施形態について、図面を参照して詳細に説明する。なお、以下の説明において、第1の実施形態と同様の構成については、同一の符号を付し、その重複する説明を省略する。
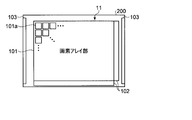
つづいて、本実施形態に係るイメージセンサのチップ構成の例について、以下に図面を参照して詳細に説明する。図13は、本実施形態に係るイメージセンサにおける第1基板の概略構成例を示すレイアウト図である。図14は、本実施形態に係るイメージセンサのチップ構成例を示す模式図である。
以上のように、第1基板200を画素アレイ部101のサイズに合せて縮小した場合でも、第1の実施形態と同様に、画素アレイ部101へのDSP14の信号処理に起因したノイズの入り込みを低減することが可能となる。それにより、DSP14を学習済みモデルに基づいた演算を実行する処理部として動作させた場合でも、品質の劣化が低減された画像を取得することが可能となる。なお、他の構成(第2基板120のレイアウト例を含む)及び効果については、第1の実施形態と同様であってよいため、ここでは詳細な説明を省略する。
次に、第3の実施形態について、図面を参照して詳細に説明する。なお、以下の説明において、第1又は第2の実施形態と同様の構成については、同一の符号を付し、その重複する説明を省略する。
つづいて、本実施形態に係るイメージセンサのチップ構成の例について、以下に図面を参照して詳細に説明する。図15は、本実施形態に係るイメージセンサにおける第1基板の概略構成例を示すレイアウト図である。図16は、本実施形態に係るイメージセンサにおける第2基板の概略構成例を示すレイアウト図である。図17は、本実施形態に係るイメージセンサのチップ構成例を示す模式図である。
以上のように、第1基板300と第2基板320と画素アレイ部101のサイズに合せて縮小した場合には、ADC17AとDSP14とを離して配置することで、DSP14で発生したノイズがADC17Aに入射することで発生するノイズを低減することが可能となる。それにより、イメージセンサ10で取得する画像の品質の低下を抑制することが可能となる。
第4の実施形態では、上述した実施形態に係るイメージセンサ10及び撮像装置1の具体的な構成例及びその取り付け例について説明する。なお、以下の説明では、第1の実施形態をベースとした場合を例示するが、ベースとする実施形態は第1の実施形態に限られず、他の実施形態であってもよい。また、本実施形態では、撮像装置1を車両に搭載した場合、すなわち、撮像装置1が車載カメラである場合を例示するが、撮像装置1の取り付け例は、車載に限定されず、種々の機器、装置、場所等に取り付けることが可能である。
図18は、本実施形態に係る撮像装置の概略構成例を示す図である。なお、図18では、説明の簡略化のため、イメージセンサ10における第1基板100が省略されている。
次に、本実施形態に係る撮像装置1の取り付け例について、幾つか例を挙げて説明する。
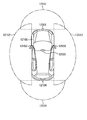
まず、撮像装置1を車両の前方を撮像するフロントカメラとして搭載する場合の取り付け例を、第1例として説明する。図19は、本実施形態の第1例に係る撮像装置の取り付け例を示す模式図である。
次に、撮像装置1を車両の後方を撮像するリアカメラとして搭載する場合の取り付け例を、第2例として説明する。図20は、本実施形態の第2例に係る撮像装置の取り付け例を示す模式図である。
以上のように、本実施形態では、フレキシブルケーブル402の一端が、第2基板120におけるADC17Aが近接配置された辺以外の辺、例えば、DSP14が近接配置された辺側に接続される。それにより、DSP14やその近傍に配置されたメモリ15におけるデータの出力端からフレキシブルケーブル402までの配線長を短くすることが可能となるため、イメージセンサ10のチップの大型化を抑制することが可能になるとともに、この配線レイアウトの設計が容易になる。また、この配線長を短くすることで、信号遅延の抑制や信号の伝搬損失の低減や消費電力の低減等を図ることが可能となる。
なお、上述した実施形態では、2次元画像を取得する固体撮像装置(イメージセンサ10)に対して本開示に係る技術を適用した場合を例示したが、本開示に係る技術の適用先は固体撮像装置に限定されるものではない。例えば、ToF(Time of Flight)センサや赤外線(IR)センサやDVS(Dynamic Vision Sensor)等、種々の受光センサに対して本開示に係る技術を適用することが可能である。すなわち、受光センサのチップ構造を積層型とすることで、センサ結果に含まれるノイズの低減やセンサチップの小型化等を達成することが可能である。
本開示に係る技術(本技術)は、様々な製品へ応用することができる。例えば、本開示に係る技術は、自動車、電気自動車、ハイブリッド電気自動車、自動二輪車、自転車、パーソナルモビリティ、飛行機、ドローン、船舶、ロボット等のいずれかの種類の移動体に搭載される装置として実現されてもよい。
本開示に係る技術(本技術)は、様々な製品へ応用することができる。例えば、本開示に係る技術は、内視鏡手術システムに適用されてもよい。
本開示に係る技術は、様々な製品へ応用することができる。例えば、本開示に係る技術は、医師等が患者から採取された細胞や組織を観察して病変を診断する病理診断システムやその支援システム等(以下、診断支援システムと称する)に適用されてもよい。この診断支援システムは、デジタルパソロジー技術を利用して取得された画像に基づいて病変を診断又はその支援をするWSI(Whole Slide Imaging)システムであってもよい。
(1)
第1基板と、
前記第1基板に貼り合わされた第2基板と、
前記第2基板に取り付けられた接続配線と、
を備え、
前記第1基板は、複数の単位画素が2次元マトリクス状に配列された画素アレイ部を備え、
前記第2基板は、
前記画素アレイ部から出力されるアナログの画素信号をデジタルの画像データへ変換する変換器と、
前記画像データに基づくデータに対して処理を実行する処理部と、
を備え、
前記変換器の少なくとも一部は、前記第2基板における第1辺側に配置され、
前記処理部は、前記第2基板における前記第1辺とは反対の第2辺側に配置され、
前記接続配線は、前記第2基板における前記第2辺以外の辺に取り付けられる
積層型受光センサ。
(2)
前記接続配線は、フレキシブルケーブルである前記(1)に記載の積層型受光センサ。
(3)
前記処理部は、前記画像データにもと付くデータに対してニューラルネットワーク計算モデルに基づく前記処理を実行する前記(1)又は(2)に記載の積層型受光センサ。
(4)
固体撮像装置と、情報処理装置が搭載された回路基板と、前記固体撮像装置と前記回路基板とを接続する接続配線とを備える車載撮像装置であって、
前記固体撮像装置は、
第1基板と、
前記第1基板に貼り合わされた第2基板と、
を備え、
前記第1基板は、複数の単位画素が2次元マトリクス状に配列された画素アレイ部を備え、
前記第2基板は、
前記画素アレイ部から出力されるアナログの画素信号をデジタルの画像データへ変換する変換器と、
前記画像データに基づくデータに対して処理を実行する処理部と、
を備え、
前記変換器の少なくとも一部は、前記第2基板における第1辺側に配置され、
前記処理部は、前記第2基板における前記第1辺とは反対の第2辺側に配置され、
前記接続配線は、前記第2基板における前記第2辺以外の辺に取り付けられるとともに、前記回路基板の第3辺に取り付けられ、
前記固体撮像装置は、前記画素アレイ部の受光面が車両の前方方向を向き且つ前記第1辺が鉛直方向下側に位置するように、前記車両内に設置され、
前記回路基板は、少なくとも前記回路基板における前記車両の前方側の端が前記固体撮像装置の前記車両の前方側の端よりも前記車両の前記前方方向へ突出し且つ主平面が水平面と平行又は略平行となるように設置される
車載撮像装置。
(5)
前記接続配線の一方の端は、前記固体撮像装置の前記第2基板における前記鉛直方向下側の前記辺に取り付けられ、
前記接続配線の他方の端は、前記回路基板における前記車両の後方側の端に取り付けられる
前記(4)に記載の車載撮像装置。
(6)
前記情報処理装置は、前記固体撮像装置よりも前記車両の前方側に位置する前記(4)又は(5)に記載の車載撮像装置。
(7)
固体撮像装置と、情報処理装置が搭載された回路基板と、前記固体撮像装置と前記回路基板とを接続する接続配線とを備える車載撮像装置であって、
前記固体撮像装置は、
第1基板と、
前記第1基板に貼り合わされた第2基板と、
を備え、
前記第1基板は、複数の単位画素が2次元マトリクス状に配列された画素アレイ部を備え、
前記第2基板は、
前記画素アレイ部から出力されるアナログの画素信号をデジタルの画像データへ変換する変換器と、
前記画像データに基づくデータに対して処理を実行する処理部と、
を備え、
前記変換器の少なくとも一部は、前記第2基板における第1辺側に配置され、
前記処理部は、前記第2基板における前記第1辺とは反対の第2辺側に配置され、
前記接続配線は、前記第2基板における前記第2辺以外の辺に取り付けられるとともに、前記回路基板の第3辺に取り付けられ、
前記固体撮像装置は、前記画素アレイ部の受光面が車両の後方方向を向くように、前記車両内に設置される
車載撮像装置。
(8)
前記回路基板は、前記固体撮像装置における前記受光面と反対側の面側に位置するように、前記車両内に設置される、前記(7)に記載の車載撮像装置。
10 イメージセンサ
11 撮像部
12 コントロール部
13 信号処理部
14、14A、14B、14C、14D DSP(機械学習部)
14a 接続部
15、15A、15B、15C、15D、15E、15F メモリ
16 セレクタ
17、17A ADC
17B DAC
20 アプリケーションプロセッサ
30 クラウドサーバ
40 ネットワーク
100、200、300 第1基板
101 画素アレイ部
101a 単位画素
102 TSVアレイ
103 パッドアレイ
104 光学系
120、320 第2基板
400 回路基板
402 フレキシブルケーブル
410 車両
411 フロントガラス
412 リアガラス
L101~L104 辺
O100 第1基板の中心
O101 画素アレイ部の中心
Claims (8)
- 第1基板と、
前記第1基板に貼り合わされた第2基板と、
前記第2基板に取り付けられた接続配線と、
を備え、
前記第1基板は、複数の単位画素が2次元マトリクス状に配列された画素アレイ部を備え、
前記第2基板は、
前記画素アレイ部から出力されるアナログの画素信号をデジタルの画像データへ変換する変換器と、
前記画像データに基づくデータに対して処理を実行する処理部と、
を備え、
前記変換器の少なくとも一部は、前記第2基板における第1辺側に配置され、
前記処理部は、前記第2基板における前記第1辺とは反対の第2辺側に配置され、
前記接続配線は、前記第2基板における前記第2辺以外の辺に取り付けられる
積層型受光センサ。 - 前記接続配線は、フレキシブルケーブルである請求項1に記載の積層型受光センサ。
- 前記処理部は、前記画像データにもと付くデータに対してニューラルネットワーク計算モデルに基づく前記処理を実行する請求項1に記載の積層型受光センサ。
- 固体撮像装置と、情報処理装置が搭載された回路基板と、前記固体撮像装置と前記回路基板とを接続する接続配線とを備える車載撮像装置であって、
前記固体撮像装置は、
第1基板と、
前記第1基板に貼り合わされた第2基板と、
を備え、
前記第1基板は、複数の単位画素が2次元マトリクス状に配列された画素アレイ部を備え、
前記第2基板は、
前記画素アレイ部から出力されるアナログの画素信号をデジタルの画像データへ変換する変換器と、
前記画像データに基づくデータに対して処理を実行する処理部と、
を備え、
前記変換器の少なくとも一部は、前記第2基板における第1辺側に配置され、
前記処理部は、前記第2基板における前記第1辺とは反対の第2辺側に配置され、
前記接続配線は、前記第2基板における前記第2辺以外の辺に取り付けられるとともに、前記回路基板の第3辺に取り付けられ、
前記固体撮像装置は、前記画素アレイ部の受光面が車両の前方方向を向き且つ前記第1辺が鉛直方向下側に位置するように、前記車両内に設置され、
前記回路基板は、少なくとも前記回路基板における前記車両の前方側の端が前記固体撮像装置の前記車両の前方側の端よりも前記車両の前記前方方向へ突出し且つ主平面が水平面と平行又は略平行となるように設置される
車載撮像装置。 - 前記接続配線の一方の端は、前記固体撮像装置の前記第2基板における前記鉛直方向下側の前記辺に取り付けられ、
前記接続配線の他方の端は、前記回路基板における前記車両の後方側の端に取り付けられる
請求項4に記載の車載撮像装置。 - 前記情報処理装置は、前記固体撮像装置よりも前記車両の前方側に位置する請求項4に記載の車載撮像装置。
- 固体撮像装置と、情報処理装置が搭載された回路基板と、前記固体撮像装置と前記回路基板とを接続する接続配線とを備える車載撮像装置であって、
前記固体撮像装置は、
第1基板と、
前記第1基板に貼り合わされた第2基板と、
を備え、
前記第1基板は、複数の単位画素が2次元マトリクス状に配列された画素アレイ部を備え、
前記第2基板は、
前記画素アレイ部から出力されるアナログの画素信号をデジタルの画像データへ変換する変換器と、
前記画像データに基づくデータに対して処理を実行する処理部と、
を備え、
前記変換器の少なくとも一部は、前記第2基板における第1辺側に配置され、
前記処理部は、前記第2基板における前記第1辺とは反対の第2辺側に配置され、
前記接続配線は、前記第2基板における前記第2辺以外の辺に取り付けられるとともに、前記回路基板の第3辺に取り付けられ、
前記固体撮像装置は、前記画素アレイ部の受光面が車両の後方方向を向くように、前記車両内に設置される
車載撮像装置。 - 前記回路基板は、前記固体撮像装置における前記受光面と反対側の面側に位置するように、前記車両内に設置される、請求項7に記載の車載撮像装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP19844089.3A EP3833006B1 (en) | 2018-07-31 | 2019-07-31 | Layered type light-receiving sensor, and on-vehicle imaging device |
| KR1020217001352A KR102797317B1 (ko) | 2018-07-31 | 2019-07-31 | 적층형 수광 센서 및 차량 탑재 촬상 장치 |
| US17/262,691 US20210168318A1 (en) | 2018-07-31 | 2019-07-31 | Stacked light-receiving sensor and electronic device |
| CN201980049008.8A CN112470461B (zh) | 2018-07-31 | 2019-07-31 | 层叠型受光传感器以及车载摄像装置 |
| US18/363,332 US12446350B2 (en) | 2018-07-31 | 2023-08-01 | Stacked light-receiving sensor and in-vehicle imaging device |
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018143973 | 2018-07-31 | ||
| JP2018-143973 | 2018-07-31 | ||
| JP2019139481A JP6705044B2 (ja) | 2018-07-31 | 2019-07-30 | 積層型受光センサ及び車載撮像装置 |
| JP2019-139481 | 2019-07-30 | ||
| JP2019-139439 | 2019-07-30 | ||
| JP2019139439A JP6689437B2 (ja) | 2018-07-31 | 2019-07-30 | 積層型受光センサ及び電子機器 |
Related Child Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US17/262,691 A-371-Of-International US20210168318A1 (en) | 2018-07-31 | 2019-07-31 | Stacked light-receiving sensor and electronic device |
| US18/363,332 Continuation US12446350B2 (en) | 2018-07-31 | 2023-08-01 | Stacked light-receiving sensor and in-vehicle imaging device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020027230A1 true WO2020027230A1 (ja) | 2020-02-06 |
Family
ID=69230868
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/030093 Ceased WO2020027230A1 (ja) | 2018-07-31 | 2019-07-31 | 積層型受光センサ及び車載撮像装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US12446350B2 (ja) |
| WO (1) | WO2020027230A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11849238B2 (en) | 2021-02-04 | 2023-12-19 | Canon Kabushiki Kaisha | Photoelectric conversion apparatus, photoelectric conversion system, moving body |
| US12453197B2 (en) | 2021-02-04 | 2025-10-21 | Canon Kabushiki Kaisha | Photoelectric conversion device and photoelectric conversion system |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016218900A (ja) * | 2015-05-25 | 2016-12-22 | 株式会社オプトエレクトロニクス | 撮像装置及び光学的情報読取装置 |
| JP2017118445A (ja) * | 2015-12-25 | 2017-06-29 | 日本電産エレシス株式会社 | 車載カメラ |
| WO2018051809A1 (ja) | 2016-09-16 | 2018-03-22 | ソニーセミコンダクタソリューションズ株式会社 | 撮像装置、及び、電子機器 |
| JP2018074445A (ja) * | 2016-10-31 | 2018-05-10 | ソニーセミコンダクタソリューションズ株式会社 | 固体撮像装置およびその信号処理方法、並びに電子機器 |
| JP2018107759A (ja) * | 2016-12-28 | 2018-07-05 | ソニーセミコンダクタソリューションズ株式会社 | 画像処理装置、画像処理方法、及び画像処理システム |
Family Cites Families (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1234234C (zh) | 2002-09-30 | 2005-12-28 | 松下电器产业株式会社 | 固体摄像器件及使用该固体摄像器件的设备 |
| US20060143135A1 (en) | 2004-11-26 | 2006-06-29 | Tucker David M | Associating licensing information with software applications |
| US9142262B2 (en) | 2009-10-23 | 2015-09-22 | Rambus Inc. | Stacked semiconductor device |
| JP5685898B2 (ja) | 2010-01-08 | 2015-03-18 | ソニー株式会社 | 半導体装置、固体撮像装置、およびカメラシステム |
| US9343497B2 (en) | 2012-09-20 | 2016-05-17 | Semiconductor Components Industries, Llc | Imagers with stacked integrated circuit dies |
| US9082338B2 (en) * | 2013-03-14 | 2015-07-14 | Pixtronix, Inc. | Display apparatus configured for selective illumination of image subframes |
| DE102013102819A1 (de) | 2013-03-19 | 2014-09-25 | Conti Temic Microelectronic Gmbh | Kameramodul sowie Verfahren zur Herstellung |
| KR102065633B1 (ko) * | 2013-08-12 | 2020-01-13 | 삼성전자 주식회사 | 이미지 센서, 이의 동작 방법, 및 이를 포함하는 시스템 |
| GB2522650A (en) * | 2014-01-31 | 2015-08-05 | Ibm | Computer system with groups of processor boards |
| US20150296158A1 (en) | 2014-04-10 | 2015-10-15 | Forza Silicon Corporation | Reconfigurable CMOS Image Sensor |
| TWI648986B (zh) | 2014-04-15 | 2019-01-21 | Sony Corporation | 攝像元件、電子機器 |
| JP2015227115A (ja) | 2014-05-30 | 2015-12-17 | 日本電産コパル株式会社 | 車載カメラ制御装置 |
| US9621769B2 (en) | 2014-06-11 | 2017-04-11 | Magna Electronics Inc. | Camera module for vehicle vision system |
| KR101663508B1 (ko) | 2014-11-10 | 2016-10-07 | 엘지전자 주식회사 | 차량의 집약형 오버헤드 콘솔 조립체 |
| US20170330876A1 (en) | 2014-12-02 | 2017-11-16 | Glenn J. Leedy | Vertical system integration |
| US9508681B2 (en) | 2014-12-22 | 2016-11-29 | Google Inc. | Stacked semiconductor chip RGBZ sensor |
| JP2016195301A (ja) | 2015-03-31 | 2016-11-17 | パナソニックIpマネジメント株式会社 | 画像処理装置、および、電子ミラーシステム |
| WO2018002774A1 (en) * | 2016-06-29 | 2018-01-04 | Semiconductor Energy Laboratory Co., Ltd. | Electronic device, operation method of the electronic device, and moving vehicle |
| JP2018007035A (ja) | 2016-07-01 | 2018-01-11 | ソニーセミコンダクタソリューションズ株式会社 | 固体撮像素子、撮像装置、および、固体撮像素子の制御方法 |
| US10467952B2 (en) * | 2016-10-12 | 2019-11-05 | Shaoher Pan | Integrated light-emitting diode arrays for displays |
| JP2018098524A (ja) * | 2016-12-08 | 2018-06-21 | ソニーセミコンダクタソリューションズ株式会社 | 撮像素子、撮像システムおよび撮像素子の制御方法 |
| US10482801B2 (en) | 2017-03-22 | 2019-11-19 | Solera Holdings, Inc. | Start and stop methods for a vehicle smart mirror |
| CN107358596B (zh) * | 2017-04-11 | 2020-09-18 | 阿里巴巴集团控股有限公司 | 一种基于图像的车辆定损方法、装置、电子设备及系统 |
| US10438332B2 (en) * | 2017-05-18 | 2019-10-08 | Semiconductor Components Industries, Llc | Methods and apparatus for selective pixel readout for image transformation |
| WO2019069447A1 (ja) * | 2017-10-06 | 2019-04-11 | オリンパス株式会社 | 撮像装置および内視鏡装置 |
| KR101916347B1 (ko) | 2017-10-13 | 2018-11-08 | 주식회사 수아랩 | 딥러닝 기반 이미지 비교 장치, 방법 및 컴퓨터 판독가능매체에 저장된 컴퓨터 프로그램 |
| US10923520B2 (en) * | 2018-03-14 | 2021-02-16 | Sony Advanced Visual Sensing Ag | Event-based vision sensor manufactured with 3D-IC technology |
| JP2019200675A (ja) * | 2018-05-17 | 2019-11-21 | 東芝メモリ株式会社 | 演算デバイス及びデータの処理方法 |
| US10714001B2 (en) * | 2018-07-11 | 2020-07-14 | X Display Company Technology Limited | Micro-light-emitting-diode displays |
| KR102899656B1 (ko) | 2018-07-31 | 2025-12-11 | 소니 세미컨덕터 솔루션즈 가부시키가이샤 | 적층형 수광 센서 및 전자기기 |
-
2019
- 2019-07-31 WO PCT/JP2019/030093 patent/WO2020027230A1/ja not_active Ceased
-
2023
- 2023-08-01 US US18/363,332 patent/US12446350B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016218900A (ja) * | 2015-05-25 | 2016-12-22 | 株式会社オプトエレクトロニクス | 撮像装置及び光学的情報読取装置 |
| JP2017118445A (ja) * | 2015-12-25 | 2017-06-29 | 日本電産エレシス株式会社 | 車載カメラ |
| WO2018051809A1 (ja) | 2016-09-16 | 2018-03-22 | ソニーセミコンダクタソリューションズ株式会社 | 撮像装置、及び、電子機器 |
| JP2018074445A (ja) * | 2016-10-31 | 2018-05-10 | ソニーセミコンダクタソリューションズ株式会社 | 固体撮像装置およびその信号処理方法、並びに電子機器 |
| JP2018107759A (ja) * | 2016-12-28 | 2018-07-05 | ソニーセミコンダクタソリューションズ株式会社 | 画像処理装置、画像処理方法、及び画像処理システム |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11849238B2 (en) | 2021-02-04 | 2023-12-19 | Canon Kabushiki Kaisha | Photoelectric conversion apparatus, photoelectric conversion system, moving body |
| US12453197B2 (en) | 2021-02-04 | 2025-10-21 | Canon Kabushiki Kaisha | Photoelectric conversion device and photoelectric conversion system |
Also Published As
| Publication number | Publication date |
|---|---|
| US20240021646A1 (en) | 2024-01-18 |
| US12446350B2 (en) | 2025-10-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6705044B2 (ja) | 積層型受光センサ及び車載撮像装置 | |
| JP7414869B2 (ja) | 固体撮像装置、電子機器及び固体撮像装置の制御方法 | |
| TWI840429B (zh) | 積層型受光感測器及電子機器 | |
| US11962916B2 (en) | Imaging device with two signal processing circuitry partly having a same type of signal processing, electronic apparatus including imaging device, and imaging method | |
| WO2020027233A1 (ja) | 撮像装置及び車両制御システム | |
| WO2021075321A1 (ja) | 撮像装置、電子機器及び撮像方法 | |
| US12446350B2 (en) | Stacked light-receiving sensor and in-vehicle imaging device | |
| WO2020027161A1 (ja) | 積層型受光センサ及び電子機器 | |
| US12167127B2 (en) | Imaging apparatus and electronic equipment | |
| US12149855B2 (en) | Light receiving device, electronic apparatus, and light receiving method to reduce a load current in a processing circuit | |
| WO2020027074A1 (ja) | 固体撮像装置および電子機器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19844089 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 20217001352 Country of ref document: KR Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2019844089 Country of ref document: EP Effective date: 20210301 |
|
| WWG | Wipo information: grant in national office |
Ref document number: 202117003600 Country of ref document: IN |
|
| WWG | Wipo information: grant in national office |
Ref document number: 2019844089 Country of ref document: EP |