WO2020071441A1 - 秘密シグモイド関数計算システム、秘密ロジスティック回帰計算システム、秘密シグモイド関数計算装置、秘密ロジスティック回帰計算装置、秘密シグモイド関数計算方法、秘密ロジスティック回帰計算方法、プログラム - Google Patents
秘密シグモイド関数計算システム、秘密ロジスティック回帰計算システム、秘密シグモイド関数計算装置、秘密ロジスティック回帰計算装置、秘密シグモイド関数計算方法、秘密ロジスティック回帰計算方法、プログラムInfo
- Publication number
- WO2020071441A1 WO2020071441A1 PCT/JP2019/038966 JP2019038966W WO2020071441A1 WO 2020071441 A1 WO2020071441 A1 WO 2020071441A1 JP 2019038966 W JP2019038966 W JP 2019038966W WO 2020071441 A1 WO2020071441 A1 WO 2020071441A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- share
- secret
- grad
- eta
- bit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images







Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L9/00—Cryptographic mechanisms or cryptographic arrangements for secret or secure communications; Network security protocols
- H04L9/08—Key distribution or management, e.g. generation, sharing or updating, of cryptographic keys or passwords
- H04L9/0816—Key establishment, i.e. cryptographic processes or cryptographic protocols whereby a shared secret becomes available to two or more parties, for subsequent use
- H04L9/085—Secret sharing or secret splitting, e.g. threshold schemes
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09C—CIPHERING OR DECIPHERING APPARATUS FOR CRYPTOGRAPHIC OR OTHER PURPOSES INVOLVING THE NEED FOR SECRECY
- G09C1/00—Apparatus or methods whereby a given sequence of signs, e.g. an intelligible text, is transformed into an unintelligible sequence of signs by transposing the signs or groups of signs or by replacing them by others according to a predetermined system
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F7/00—Methods or arrangements for processing data by operating upon the order or content of the data handled
- G06F7/38—Methods or arrangements for performing computations using exclusively denominational number representation, e.g. using binary, ternary, decimal representation
- G06F7/48—Methods or arrangements for performing computations using exclusively denominational number representation, e.g. using binary, ternary, decimal representation using non-contact-making devices, e.g. tube, solid state device; using unspecified devices
- G06F7/544—Methods or arrangements for performing computations using exclusively denominational number representation, e.g. using binary, ternary, decimal representation using non-contact-making devices, e.g. tube, solid state device; using unspecified devices for evaluating functions by calculation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L2209/00—Additional information or applications relating to cryptographic mechanisms or cryptographic arrangements for secret or secure communication H04L9/00
- H04L2209/46—Secure multiparty computation, e.g. millionaire problem
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L9/00—Cryptographic mechanisms or cryptographic arrangements for secret or secure communications; Network security protocols
- H04L9/008—Cryptographic mechanisms or cryptographic arrangements for secret or secure communications; Network security protocols involving homomorphic encryption
Definitions
- the present invention relates to a secret calculation technique.
- the present invention relates to a technique for secretly calculating a sigmoid function or a technique for secretly calculating model parameters of a logistic regression model.
- Non-Patent Document 1 a method of approximating a third-order polynomial by secret calculation based on perfect homomorphic encryption
- Patent Literature 2 and Non-Patent Literature 3 a method of approximating a polynomial by secret calculation based on additive homomorphic encryption
- the secret calculation is a method of obtaining an operation result of a specified operation without restoring an encrypted numerical value (for example, see Reference Non-Patent Document 1).
- encryption is performed in which a plurality of pieces of information from which a numerical value can be restored are distributed to three secret calculation devices, and addition, subtraction, constant sum, multiplication, and constant multiplication are performed without restoring the numerical value.
- Logical operation (negation, logical product, logical sum, exclusive logical sum), and data format conversion (integer, binary number) are distributed to three secret computing devices in a distributed state, that is, kept encrypted. Can be.
- the number of shares is not limited to 3, but can be W (W is a predetermined constant of 3 or more), and a protocol that realizes secret calculation by cooperative calculation by W secret calculation devices is called a multi-party protocol.
- W is a predetermined constant of 3 or more
- a protocol that realizes secret calculation by cooperative calculation by W secret calculation devices is called a multi-party protocol.
- the sigmoid function is a non-linear function represented by the following equation (see FIG. 1), and it is not easy to calculate the sigmoid function secretly while maintaining both accuracy and processing speed.
- Non-Patent Documents 1 to 3 are not practical because the approximation accuracy is not good and the approximation formula must be re-created every time according to the domain of x. Although the approximation accuracy of the approximation polynomial is improved as the order is increased, the process is slowed down because the number of times of multiplication increases.
- an object of the present invention is to provide a technique for secretly calculating a sigmoid function at high speed and with high accuracy.
- an object of the present invention is to provide a technique of secretly calculating model parameters of a logistic regression model at high speed and with high accuracy using a technique of secretly calculating a sigmoid function.
- the secret sigmoid function calculation system provides a map ⁇ with parameters (a 0 ,..., A k ⁇ 1 ) representing a domain of a sigmoid function ⁇ (x) and a parameter ( ⁇ (a 0 )) representing a range.
- m is an integer of 1 or more
- ⁇ is a real number satisfying 0 ⁇ ⁇ 1
- Sigmoid ([[x]]) is a secret sigmoid function calculation according to claim 1.
- Model parameter update for calculating the j-th element [[w j, t + 1 ]] of the share [[w t + 1 ⁇ ]] of the value w t + 1 ⁇ of the model parameter w ⁇ updated t + 1 times means Including the.
- Sigmoid ([[x]]) is a secret sigmoid function calculation according to claim from the input vector x ⁇ share using the system [[x ⁇ ]], a function to calculate the value y ⁇ share of the sigmoid function for the input vector x ⁇ [[y ⁇ ]] , optionally to be secure computing
- the value of is expressed as p and the precision of p is expressed as b_p [bit]
- m is an integer of 1 or more
- ⁇ is a real number satisfying 0 ⁇ ⁇ 1
- Sigmoid ([[x]]) is a secret sigmoid function calculation according to claim 1.
- secret calculation of a sigmoid function can be performed at high speed and with high accuracy.
- model parameters of a logistic regression model can be secretly calculated at high speed and with high accuracy.
- FIG. 1 is a block diagram showing a configuration of a secret sigmoid function calculation system 10.
- FIG. 2 is a block diagram showing a configuration of a secret sigmoid function calculation device 100 i .
- 5 is a flowchart showing the operation of the secret sigmoid function calculation system 10.
- FIG. 1 is a block diagram showing a configuration of a secret logistic regression calculation system 20.
- Block diagram showing the configuration of a secret logistic regression apparatus 200 i. 9 is a flowchart showing the operation of the secret logistic regression calculation system 20.
- the secret sigmoid function calculation algorithm and secret logistic regression calculation algorithm described later are constructed by combining existing calculations on secret calculation.
- the operations required by these algorithms are concealment, addition, multiplication, and hpsum.
- the hpesome is a sum of products. Hereinafter, each operation will be described.
- [Confidential] [[x]] is a value obtained by concealing x by secret sharing (hereinafter referred to as a share of x). Any method can be used as the secret sharing method. For example, Shamir secret sharing on GF (2 61 -1), can be used replication secret sharing on Z 2.
- a plurality of secret sharing methods may be combined in one algorithm. In this case, they are converted as needed.
- n is the number of model parameters, and is a predetermined positive integer.
- x is called plaintext of [[x]].
- [[x]] or [[y]] may be a value that is not concealed (hereinafter referred to as a public value).
- [[x]] and ⁇ are input and [[x + ⁇ ]] are output as ⁇ and ⁇ are public values, or ⁇ and [[y]] are input and [[ ⁇ ⁇ y]] can also be output.
- Reference Non-Patent Documents 3 and 4 Reference Non-Patent Documents 3 and 4.
- Reference Non-Patent Document 3 Ben-Or, M., Goldwasser, S. and Wigderson, A., “Completenesstheorems for non-cryptographic fault-tolerant distributed computation”, Proceedings of the twentieth annual ACM symposium on Theory of computing, ACM , pp. 1-10, 1988.
- Reference non-patent document 4 Gennaro, R., Rabin, MO and Rabin, T., “Simplied VSS and fast-track multiparty computations with applications to threshold cryptography”, Proceedings of the seventeenth annual ACM symposium on Principles of distributed computing, ACM, pp.101-111, 1998.
- Secret batch mapping is a function for calculating a lookup table, and is a technique that can arbitrarily define a domain and a value range.
- the secret batch mapping for an input x that does not belong to the domain, the maximum value that belongs to the domain and is equal to or smaller than x is output. Therefore, when 4 is input, 30 is output.
- Non-Patent Document 5 Hiroki Hamada, Dai Igarashi, Koji Senda, “Batch Mapping Algorithm on Secret Calculation”, IEICE Transactions A, Vol.J96-A, No.4, pp.157-165, 2013.
- parameters (a 0 ,..., a k-1 ) representing the domain of the sigmoid function ⁇ (x)
- parameters ( ⁇ (a 0 ),..., ⁇ (a k-1 ) representing the range ) (where, k is an integer of 1 or more, a 0, ..., a k -1 by using the a 0 ⁇ ...
- the definition range and the value range in the secret batch mapping are values that can be set arbitrarily, they can be determined according to the required accuracy and processing speed. Therefore, unlike the case where approximation is performed using a polynomial, a value with arbitrary precision can be set. Therefore, for example, it is also possible to achieve accuracy comparable to plain text.
- Sigmoid ([[x ⁇ ]]) ([[ ⁇ (a f (0) )]]],..., [[ ⁇ (a f (m ⁇ 1) )]]).
- (1, x ⁇ ) represents an n + 1-dimensional vector (1, x 1 ,..., X n ).
- the model parameter w ⁇ is updated for each j-th element w j . It is assumed that an appropriate value is set for the initial value w 0 ⁇ of the model parameter w ⁇ .
- the secret logistic regression calculation algorithm receives the share [[x i ⁇ ]] of the data x i ⁇ of the explanatory variable and the share [[y i ]] of the data y i of the objective variable, and obtains parameters ⁇ , T which are public values. Is used to calculate and output the share [[w ⁇ ]] of the model parameter w ⁇ .
- FIG. 2 shows a specific procedure. From FIG. 2, it can be seen that in step 4 to step 23, [[w ⁇ ]] is calculated according to equation (3). Also, it can be seen that in step 10, the value of the sigmoid function is obtained using the secret sigmoid function calculation algorithm Sigmoid.
- the accuracy can be set arbitrarily in the secret batch mapping, but since the overhead is proportional to the size of the range and the domain, the balance between the accuracy and the overhead is required for more efficient secret calculation of the sigmoid function. You need to think. For example, if the precision is set to about 10 -4 , the calculation can be performed with high accuracy while keeping the size of the domain and the range small even when compared with plain text.
- FIG. 3 is a block diagram showing a configuration of the secret sigmoid function calculation system 10.
- the secret sigmoid function calculation system 10 includes W (W is a predetermined integer of 3 or more) secret sigmoid function calculation devices 100 1 ,..., 100 W.
- the secret sigmoid function calculation devices 100 1 ,..., 100 W are connected to the network 800 and can communicate with each other.
- the network 800 may be, for example, a communication network such as the Internet or a broadcast communication channel.
- FIG. 4 is a block diagram showing the configuration of the secret sigmoid function calculation device 100 i (1 ⁇ i ⁇ W).
- FIG. 5 is a flowchart showing the operation of the secret sigmoid function calculation system 10.
- Secret sigmoid function computer 100 i includes a secret collective mapping calculator 110 i, a recording unit 190 i.
- Each component of the secret sigmoid function calculation device 100 i except the recording unit 190 i performs the operations required in the secret sigmoid function calculation algorithm, that is, at least concealment, addition, multiplication, hPsum (hpsum), and secret batch mapping. Among them, it is configured so that the operation required to realize the function of each component can be executed.
- a specific functional configuration for realizing each operation is sufficient to execute, for example, the algorithms disclosed in Reference Non-Patent Documents 1 to 5, respectively, and these are conventional configurations. Therefore, detailed description is omitted.
- the recording unit 190 i is a component which records the information necessary to process the secret sigmoid function computer 100 i.
- the recording unit 190 i is a parameter (a 0, ..., a k -1) representing the domain of the sigmoid function sigma (x) required for the definition of secret collective mapping map sigma as a parameter representing the value range (sigma ( a 0 ),..., ⁇ (a k-1 )) (where k is an integer of 1 or more, and a 0 ,..., a k-1 are real numbers that satisfy a 0 ⁇ ... ⁇ a k-1 ) Keep it.
- the secret sigmoid function calculation system 10 realizes a secret sigmoid function calculation algorithm that is a multi-party protocol by the cooperative calculation by the W secret sigmoid function calculation devices 100 i . Therefore, the secret batch mapping calculation means 110 (not shown) of the secret sigmoid function calculation system 10 includes secret batch mapping calculation units 110 1 ,..., 110 W.
- calculating the sigmoid function for an input vector means calculating the value of the sigmoid function for each element of the input vector.
- the operation of the secret sigmoid function calculation system 10 will be described with reference to FIG.
- the sigmoid function can be secretly calculated at high speed and with high accuracy.
- the invention of the present embodiment realizes the calculation of the sigmoid function, which is a non-linear function for which the secret calculation is not easy, by using the secret batch mapping. Therefore, by utilizing the fact that the domain of the secret collective mapping is arbitrarily determined, the secret calculation of the sigmoid function can be realized with higher accuracy, if necessary, prior to the processing speed.
- the inverse function ⁇ ⁇ 1 of the sigmoid function may be used when setting the domain and the value range.
- the inverse sigmoid function ⁇ -1 May be used. For example, after determining desired parameters (b 0 ,..., B k ⁇ 1 ), the value of a i corresponding to each b i (0 ⁇ i ⁇ k ⁇ 1) is determined using the inverse sigmoid function ⁇ ⁇ 1. calculate.
- the calculated (a 0 ,..., a k-1 ) is defined as a parameter representing the domain of the function
- the desired parameters (b 0 ,..., b k-1 ) are defined as parameters representing the range of the function. It may be.
- the inverse sigmoid function ⁇ -1 is, for example, as follows.
- FIG. 6 is a block diagram showing a configuration of the secret logistic regression calculation system 20.
- the secret logistic regression calculation system 20 includes W ′ (W ′ is a predetermined integer of 3 or more) secret logistic regression calculation devices 200 1 ,..., 200 W ′ .
- Secret Logistic regression calculation device 200 1, ..., 200 W ' is connected to the network 800, and can communicate with each other.
- the network 800 may be, for example, a communication network such as the Internet or a broadcast communication channel.
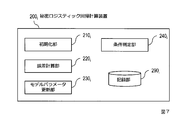
- FIG. 7 is a block diagram showing a configuration of the secret logistic regression calculation device 200 i (1 ⁇ i ⁇ W ′).
- FIG. 8 is a flowchart showing the operation of the secret logistic regression calculation system 20.
- Secret Logistic regression calculation device 200 i includes an initialization section 210 i, and the error calculator 220 i, and the model parameter updating unit 230 i, and a condition determination section 240 i, a recording unit 290 i .
- Each component of the secret logistic regression calculation device 200 i except for the recording unit 290 i performs operations required by the secret logistic regression calculation algorithm, that is, at least concealment, addition, multiplication, hPsum, and secret batch mapping. Among them, it is configured so that the operation required to realize the function of each component can be executed.
- the recording unit 290 i is a component that records information necessary for processing of the secret logistic regression calculation device 200 i .
- the recording unit 290 i records parameters ⁇ , T (where ⁇ is a real number satisfying 0 ⁇ ⁇ 1, and T is an integer of 1 or more).
- the recording unit 290 i is kept also recorded parameters required for the calculation of the secret sigmoid function calculation algorithm Sigmoid.
- the recording unit 290 i records the parameters (a 0 ,..., A k ⁇ 1 ), ( ⁇ (a 0 ),..., ⁇ (a k ⁇ 1 )).
- the secret logistic regression calculation system 20 implements a secret logistic regression calculation algorithm that is a multi-party protocol by the cooperative calculation by the W ′ secret logistic regression calculation devices 200 i . Therefore, the initialization means 210 (not shown) of the secret logistic regression calculation system 20 is constituted by the initialization units 210 1 ,..., 210 W ′ , and the error calculation means 220 (not shown) is provided by the error calculation unit 220. 1, ..., 'consist of, the model parameter updating unit 230 (not shown) is the model parameter updating unit 230 1, ..., 230 W' 220 W consists of the convergence condition judging means 240 (not shown) condition determination section 240 1, ..., composed of 240 W '.
- the initialization means 210 sets the share [[w 0 ⁇ ]] of the initial value w 0 ⁇ of the model parameter w ⁇ (S210). Specifically, an appropriate share [[w 0 ⁇ ]] of an appropriate initial value w 0 ⁇ recorded in the recording unit 290 i in advance may be set. This corresponds to Step 1 of the secret logistic regression calculation algorithm in FIG.
- the condition determination unit 240 determines a preset repetition condition of model parameter update, that is, t ⁇ T, and repeats the processing of S220 to S230 when the condition is satisfied, and when the repetition condition is not satisfied (the predetermined condition is not satisfied). If the number of times of learning T has been reached), the share [[w T ⁇ 1 ⁇ ]] is output as the share [[w ⁇ ]] of the model parameter w ⁇ , and the process ends (S240).
- ⁇ Modification 1 of Second Embodiment Logistic regression analysis may be performed using a secret batch mapping and right shift.
- the secret batch mapping has the property that the numerical accuracy can be adjusted. However, if it is desired to calculate with higher accuracy and / or if large learning data is used, the accuracy may be further adjusted using a right shift. Note that simply writing right shift indicates an arithmetic right shift.
- secret calculation is performed on fixed-point numbers in order to reduce processing costs. That is, when the value of w such as is the subject of the secure computing includes decimals, the secure computing shall be performed on the multiplied value 2 b to this value. In this case, by calculating the value obtained by dividing the 2 b against the result of the secure computing is originally obtained result of secure computing corresponding to the value which has been the subject of secure computing. B at this time is called accuracy.
- any vector to be secure computing the q ⁇ , when the q ⁇ elements and q i, and notation q ⁇ accuracy b_q [bit] The, q ⁇ share of [[q ⁇ ] ] Indicates that it is actually composed of a fixed-point share of [[q i ⁇ 2 b_q ]].
- the multiplication of 2 b is performed when for example appropriate by secret logistic regression calculation device 200.
- Examples of appropriate times are when the data to be subjected to the secret calculation is registered in the secret logistic regression calculation device 200, when the target to be subjected to the secret calculation is converted from the plaintext to the share, or before the secret calculation.
- the division of 2 b is performed when for example appropriate by secret logistic regression calculation device 200. Examples when appropriate are when returning the result of the secret calculation to the client that requested the secret calculation, when converting the share to plaintext, or after the secret calculation.
- the precision of eta_grad_ave_shift is expressed as b_w [bit]
- the precision of x i ⁇ (0 ⁇ i ⁇ m-1) is expressed as b_x [bit]
- the precision of y i (0 ⁇ i ⁇ m ⁇ 1), c i (0 ⁇ i ⁇ m ⁇ 1), d i (0 ⁇ i ⁇ m ⁇ 1) is expressed as b_y [bit]
- the precision is represented as b_ ⁇ [bit]
- the precision of the reciprocal 1 / m of the number of training data is represented as b_m + H [bit]
- the precision of b i (0 ⁇ i ⁇ m-1) is b_w + b_x [bit ]
- b_w, b_x, b_y, b_ ⁇ , b_m, H, and b_tmp are positive integers predetermined according to the performance of the computer that performs the secret calculation. Note that H satisfies H ⁇ log 2 (m).
- the calculation of 1 / m is performed in plain text in advance by using the fact that the number m of data is obtained in plain text. Thereby, it can be calculated as a multiplication with 1 / m during the secret calculation. At that time, in order to guarantee the accuracy b_m [bit] of 1 / m, it is necessary to multiply 1 / m by 2 b_m + H.
- the processing of S210 by the initialization means 210 and the processing of S220 by the error calculation means 220 are the same as described above.
- the model parameter updating unit 230 performs the following processing.
- the maximum value of i is m (that is, when the number of data is m)
- the memory amount required by eta_grad is b_y + b_x + b_ ⁇ + ceil (log 2 (m)) [bit]. Since this value increases and overflows, rshift is performed in the next process. Note that ceil means rounding up.
- rshift (a, b) indicates that the value of a is arithmetically shifted right by b [bit].
- condition determination unit 240 The processing of the condition determination unit 240 is the same as described above.
- the conversion from the logical right shift to the arithmetic right shift may be performed, for example, by the following processing.
- rlshift (a, b) indicates that a is logically shifted b by [b] right.
- the secure computing and explicitly indicates that performed on the multiplied value 2 b.
- [[B ⁇ 2 n ]] literally indicates that a value of B ⁇ 2 n is shared.
- the model parameter updating unit 230 first determines the value A of the accuracy b_y + b_x + b_ ⁇ that satisfies
- ⁇ A. Then, the model parameter updating unit 230 calculates a B ⁇ 2 n eta_grad ⁇ satisfy 2 n + A ⁇ 2 n B ⁇ 2 n share of [[B ⁇ 2 n]] .
- b_x + b_ ⁇ -b_tmp)) Calculate a share [[B ⁇ 2 n ]] of B ⁇ 2 n that satisfies b).
- the calculated [[a ⁇ 2 m ]] is [[eta_grad_shift]] in the above description.
- the model parameter update unit 230 Since the accuracy of eta_grad_ave is b_tmp + b_m + H, the model parameter update unit 230 first determines the value A of the accuracy b_tmp + b_m + H that satisfies
- ⁇ A. Then, the model parameter updating unit 230 calculates a B ⁇ 2 n eta_grad_ave ⁇ satisfy 2 n + A ⁇ 2 n B ⁇ 2 n share of [[B ⁇ 2 n]] .
- the first modified example since a collective mapping which is not general in the plaintext architecture is used, the first modified example is a specific process different from the case where the plaintext process is directly subjected to the secret calculation. I can't say that.
- ⁇ Modification 2 of Second Embodiment >> ⁇ / m may be approximated by a power of two and replaced with a right shift (rshift).
- fine settings can be made by setting the learning rate ⁇ to high accuracy.
- the right shift operation is required twice, and b_y + b, x + b_ ⁇ , and b_tmp + b_m + H are likely to be large values, which may reduce the calculation efficiency. There is.
- the second modification of the second embodiment the number of processes is reduced by multiplying the multiplication with ⁇ and the multiplication with 1 / m as ⁇ / m, thereby improving the calculation efficiency.
- the second modification of the second embodiment has better processing efficiency than the first modification of the second embodiment, but cannot set the learning rate ⁇ finely. However, it is considered that there is almost no problem because the difference in the learning rate has little effect on the quality of parameters finally obtained.
- secret calculation is performed on fixed-point numbers in order to reduce processing costs. That is, when the value of w such as is the subject of the secure computing includes decimals, the secure computing shall be performed on the multiplied value 2 b to this value. In this case, by calculating the value obtained by dividing the 2 b against the result of the secure computing is originally obtained result of secure computing corresponding to the value which has been the subject of secure computing. B at this time is called accuracy.
- any vector to be secure computing the q ⁇ , when the q ⁇ elements and q i, and notation q ⁇ accuracy b_q [bit] The, q ⁇ share of [[q ⁇ ] ] Indicates that it is actually composed of a fixed-point share of [[q i ⁇ 2 b_q ]].
- the multiplication of 2 b is performed when for example appropriate by secret logistic regression calculation device 200.
- Examples of appropriate times are when the data to be subjected to the secret calculation is registered in the secret logistic regression calculation device 200, when the target to be subjected to the secret calculation is converted from the plaintext to the share, or before the secret calculation.
- the division of 2 b is performed when for example appropriate by secret logistic regression calculation device 200. Examples when appropriate are when returning the result of the secret calculation to the client that requested the secret calculation, when converting the share to plaintext, or after the secret calculation.
- the precision of w ⁇ , w 0 ⁇ , w t ⁇ , w t + 1 ⁇ , eta_grad_ave is expressed as b_w [bit]
- the precision of x i ⁇ (0 ⁇ i ⁇ m-1) is expressed as b_x [bit]
- the precision of y i (0 ⁇ i ⁇ m ⁇ 1), c i (0 ⁇ i ⁇ m ⁇ 1), d i (0 ⁇ i ⁇ m ⁇ 1) is expressed as b_y [bit]
- the accuracy is expressed as b_ ⁇ [bit]
- the accuracy of b i (0 ⁇ i ⁇ m -1) is expressed as b_w + b_x [bit]
- b_w, b_x, b_y, b_ ⁇ are positive integers that are predetermined according to the performance of the
- the processing of S210 by the initialization means 210 and the processing of S220 by the error calculation means 220 are the same as described above.
- the model parameter updating unit 230 performs the following processing.
- X is a value that approximates ⁇ / m by division by 2 X and is calculated, for example, as follows.
- floor is a function representing truncation.
- X is calculated by the secret logistic regression calculator 200 before the secret calculation.
- condition determination unit 240 The processing of the condition determination unit 240 is the same as described above.
- the conversion from the logical right shift to the arithmetic right shift may be performed by, for example, the following processing.
- X needs to be considered.
- the secure computing and explicitly indicates that performed on the multiplied value 2 b.
- [[B ⁇ 2 n ]] literally indicates that a value of B ⁇ 2 n is shared.
- a ⁇ 2 m / 2 X B ⁇ 2 m / 2 X -A ⁇ 2 m / 2 X
- the model parameter update unit 230 Since the precision of e is b_y + b_x, the model parameter update unit 230 first determines the value A of the precision b_y + b_x that satisfies
- normalization may be performed while keeping the data secret using a right shift.
- normalization which is a pre-processing that makes all data having different value ranges such as height and age fall within a specific range such as 0 to 1, is often used in general machine learning. Therefore, in order to make machine learning on secret calculation practicable, it is necessary to be able to perform normalization on secret calculation.
- the Nesterov Accelerated Gradient (NAG) method may be applied. If the parameter learning is performed using the simple gradient descent method, the learning efficiency is not good. Therefore, in many cases, an optimization method is actually adopted to increase the learning efficiency. However, since many optimization methods include calculations, such as division, that are difficult to perform in secret calculation, it is not easy to adopt an optimization method when performing parameter learning in secret calculation. In such a situation, the NAG method is an optimization method that can be realized only by addition / subtraction multiplication, and can be incorporated into secret calculation at low cost.
- the parameter learning formula when the NAG method is applied is as follows.
- v ⁇ is a weight vector newly added in the fourth modification of the second embodiment.
- ⁇ can be arbitrarily determined by a parameter (attenuation rate) satisfying 0 ⁇ ⁇ ⁇ 1.
- Modification 4 of the second embodiment which is a modification when the NAG method is applied to Modification 2 of the second embodiment, is as follows.
- the precision of w ⁇ , w 0 ⁇ , w t ⁇ , w t + 1 ⁇ , eta_grad_ave is expressed as b_w [bit]
- the precision of x i ⁇ (0 ⁇ i ⁇ m-1) is expressed as b_x [bit]
- the precision of y i (0 ⁇ i ⁇ m ⁇ 1), c i (0 ⁇ i ⁇ m ⁇ 1), d i (0 ⁇ i ⁇ m ⁇ 1) is expressed as b_y [bit]
- the precision of (0 ⁇ i ⁇ m-1) is represented as b_w + b_x [bit]
- the precision of e is represented as b_y + b_x [bit]
- the precision of the attenuation rate ⁇ is represented as b_ ⁇
- v ⁇ The precision of v 0 ⁇ , v t ⁇ , v
- b_w, b_x, b_y, b_ ⁇ are positive integers that are predetermined according to the performance of the computer that performs the secret calculation.
- the initialization means 210 calculates the share [[v 0 ⁇ ]] of the initial value v 0 ⁇ of the weight vector v ⁇ in addition to the share [[w 0 ⁇ ]] of the initial value w 0 ⁇ of the model parameter w ⁇ . It is set (S210). Specifically, they are recorded in advance in the recording unit 290 i, the appropriate initial value w 0 ⁇ share of [[w 0 ⁇ ]] and appropriate initial value v 0 ⁇ share of [[v 0 ⁇ ]] It is good to set.
- the model parameter updating unit 230 performs the following processing.
- condition determination unit 240 The processing of the condition determination unit 240 is the same as described above.
- ⁇ Learning efficiency can be improved by using the optimization method based on the NAG method.
- the device of the present invention includes, for example, an input unit to which a keyboard or the like can be connected, an output unit to which a liquid crystal display or the like can be connected, and a communication device (for example, a communication cable) that can communicate outside the hardware entity as a single hardware entity ,
- a communication unit a CPU (which may include a Central Processing Unit, a cache memory and a register), a RAM or ROM as a memory, an external storage device as a hard disk, and an input unit, an output unit, and a communication unit thereof.
- the hardware entity may be provided with a device (drive) that can read and write a recording medium such as a CD-ROM.
- a physical entity provided with such hardware resources includes a general-purpose computer.
- the external storage device of the hardware entity stores a program necessary for realizing the above-described functions, data necessary for processing the program, and the like. It may be stored in a ROM that is a dedicated storage device). Data obtained by the processing of these programs is appropriately stored in a RAM, an external storage device, or the like.
- each program stored in the external storage device (or ROM or the like) and data necessary for processing of each program are read into the memory as needed, and interpreted and executed / processed by the CPU as appropriate. .
- the CPU realizes predetermined functions (the above-described components, such as components, means, etc.).
- the processing function of the hardware entity (the device of the present invention) described in the above embodiment is implemented by a computer, the processing content of the function that the hardware entity should have is described by a program. By executing this program on a computer, the processing functions of the hardware entity are realized on the computer.
- a program describing this processing content can be recorded on a computer-readable recording medium.
- a computer-readable recording medium for example, any recording medium such as a magnetic recording device, an optical disk, a magneto-optical recording medium, and a semiconductor memory may be used.
- a hard disk device, a flexible disk, a magnetic tape, or the like is used as a magnetic recording device, and a DVD (Digital Versatile Disc), a DVD-RAM (Random Access Memory), and a CD-ROM (Compact Disc Read Only) are used as optical disks.
- DVD Digital Versatile Disc
- DVD-RAM Random Access Memory
- CD-ROM Compact Disc Read Only
- CD-R Recordable
- RW ReWritable
- MO Magnetic-Optical disc
- EEP-ROM Electrically Erasable and Programmable-Read Only Memory
- This program is distributed by selling, transferring, lending, or the like, a portable recording medium such as a DVD or a CD-ROM on which the program is recorded. Further, the program may be stored in a storage device of a server computer, and the program may be distributed by transferring the program from the server computer to another computer via a network.
- the computer that executes such a program first stores, for example, a program recorded on a portable recording medium or a program transferred from a server computer in its own storage device. Then, when executing the processing, the computer reads the program stored in its own recording medium and executes the processing according to the read program. Further, as another execution form of the program, the computer may directly read the program from the portable recording medium and execute processing according to the program, and further, the program may be transferred from the server computer to the computer. Each time, the processing according to the received program may be sequentially executed.
- ASP Application ⁇ Service ⁇ Provider
- the program in the present embodiment includes information used for processing by the computer and which is similar to the program (data that is not a direct command to the computer but has characteristics that define the processing of the computer).
- a hardware entity is configured by executing a predetermined program on a computer, but at least a part of the processing may be realized by hardware.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Mathematical Analysis (AREA)
- Computing Systems (AREA)
- Computational Mathematics (AREA)
- Mathematical Optimization (AREA)
- Pure & Applied Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- Computer Security & Cryptography (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Complex Calculations (AREA)
- Storage Device Security (AREA)
Abstract
Description
(参考非特許文献1:千田浩司,濱田浩気,五十嵐大,高橋克巳,“軽量検証可能3パーティ秘匿関数計算の再考”,In CSS,2010.)
[秘匿化]
[[x]]をxを秘密分散で秘匿した値(以下、xのシェアという)とする。秘密分散方法には、任意の方法を用いることができる。例えば、GF(261-1)上のShamir秘密分散、Z2上の複製秘密分散を用いることができる。
(参考非特許文献2:Shamir, A., “How to share a secret”, Communications of theACM, Vol.22, No.11, pp.612-613, 1979.)
秘密計算による加算[[x]]+[[y]]は、[[x]], [[y]]を入力とし、[[x+y]]を出力する。秘密計算による乗算[[x]]×[[y]](mul([[x]], [[y]]))は、[[x]], [[y]]を入力とし、[[x×y]]を出力する。
(参考非特許文献3:Ben-Or, M., Goldwasser, S. and Wigderson, A., “Completenesstheorems for non-cryptographic fault-tolerant distributed computation”, Proceedings of the twentieth annual ACM symposium on Theory of computing, ACM, pp. 1-10, 1988.)
(参考非特許文献4:Gennaro, R., Rabin, M. O. and Rabin, T., “Simplied VSS and fast-track multiparty computations with applications to threshold cryptography”, Proceedings of the seventeenth annual ACM symposium on Principles of distributed computing, ACM, pp.101-111, 1998.)
秘密計算hpsum([[x→]], [[y→]])は、[[x→]], [[y→]](ただし、x→=(x0, …, xn-1), y→=(y0, …, yn-1))を入力とし、[[Σj=0 n-1xjyj]]を出力する。つまり、2つのベクトルの第j要素の積の和を出力する。
(秘密一括写像)
図1に示すような単調増加関数であるシグモイド関数σ(x)を秘密計算するために、本発明の実施形態では、秘密一括写像を用いる。以下、秘密一括写像について説明する。
ここでは、秘密一括写像を用いてシグモイド関数を秘密計算するアルゴリズム(秘密シグモイド関数計算アルゴリズム)について説明する。例えば、参考非特許文献5に記載の秘密一括写像のアルゴリズムを用いることができる。
(参考非特許文献5:濱田浩気, 五十嵐大, 千田浩司, “秘匿計算上の一括写像アルゴリズム”, 電子情報通信学会論文誌A, Vol.J96-A, No.4, pp.157-165, 2013.)
つまり、秘密シグモイド関数計算アルゴリズムは、ベクトルx→=(x0, …, xm-1)のシェア[[x→]]=([[x0]], …, [[xm-1]])を入力とし、シグモイド関数σ(x)の定義域を表すパラメータ(a0, …, ak-1)と値域を表すパラメータ(σ(a0), …, σ(ak-1))(ただし、kは1以上の整数、a0, …, ak-1はa0<…<ak-1を満たす実数)により定義される秘密一括写像mapσを用いて、0≦i≦m-1に対して、aj≦xi<aj+1となるjをf(i)とし、([[σ(af(0))]], …, [[σ(af(m-1))]])を出力する。
ロジスティック回帰分析のモデルf(x→)(ただし、x→=(x1, …, xn))は、n+1次元ベクトルw→=(w0, …, wn)をモデルパラメータとして、次式により表される。

(入力)説明変数のデータxi →、目的変数のデータyi(ただし、0≦i≦m-1、mは1以上の整数であり、学習データの数を表す)
なお、学習率η及び学習回数Tについては、適切な値が設定されるものとする。
ここでは、ロジスティック回帰モデルのモデルパラメータを秘密計算するアルゴリズム(秘密ロジスティック回帰計算アルゴリズム)について説明する。秘密ロジスティック回帰計算アルゴリズムは、説明変数のデータxi →のシェア[[xi →]]、目的変数のデータyiのシェア[[yi]]を入力とし、公開値であるパラメータη, Tを用いて、モデルパラメータw→のシェア[[w→]]を計算し、出力する。具体的な手順を図2に示す。図2をみれば、ステップ4~ステップ23では式(3)に従い[[w→]]を計算していることがわかる。また、ステップ10において、秘密シグモイド関数計算アルゴリズムSigmoidを用いてシグモイド関数の値を求めていることもわかる。
上述した通り、秘密一括写像では精度を任意に設定することができるが、値域や定義域のサイズに比例するオーバーヘッドがかかるため、より効率よくシグモイド関数を秘密計算するためには精度とオーバーヘッドのバランスを考える必要がある。例えば、精度を10-4程度に設定すると、平文と比較しても定義域や値域のサイズを少なく抑えつつ、精度よく計算することができる。
以下、図3~図5を参照して秘密シグモイド関数計算システム10について説明する。図3は、秘密シグモイド関数計算システム10の構成を示すブロック図である。秘密シグモイド関数計算システム10は、W個(Wは3以上の所定の整数)の秘密シグモイド関数計算装置1001、…、100Wを含む。秘密シグモイド関数計算装置1001、…、100Wは、ネットワーク800に接続しており、相互に通信可能である。ネットワーク800は、例えば、インターネットなどの通信網あるいは同報通信路などでよい。図4は、秘密シグモイド関数計算装置100i(1≦i≦W)の構成を示すブロック図である。図5は、秘密シグモイド関数計算システム10の動作を示すフローチャートである。
以下、図6~図8を参照して秘密ロジスティック回帰計算システム20について説明する。図6は、秘密ロジスティック回帰計算システム20の構成を示すブロック図である。秘密ロジスティック回帰計算システム20は、W'個(W'は3以上の所定の整数)の秘密ロジスティック回帰計算装置2001、…、200W'を含む。秘密ロジスティック回帰計算装置2001、…、200W'は、ネットワーク800に接続しており、相互に通信可能である。ネットワーク800は、例えば、インターネットなどの通信網あるいは同報通信路などでよい。図7は、秘密ロジスティック回帰計算装置200i(1≦i≦W')の構成を示すブロック図である。図8は、秘密ロジスティック回帰計算システム20の動作を示すフローチャートである。
秘密一括写像と右シフトを用いてロジスティック回帰分析を行ってもよい。秘密一括写像には数値精度の調節をできる性質がある。しかし、より高い精度で計算したい場合、及び/又は、大きな学習データを用いる場合は、右シフトを用いて精度の調節を更に行ってもよい。なお、単に右シフトと書いた場合には、算術右シフトを表す。
η/mを2べきで近似し、右シフト(rshift)に置き換えてもよい。第2実施形態の変形例1では、学習率ηを高い精度にすることで細やかな設定が可能である。しかし、第2実施形態の変形例1では、右シフト演算が2回必要であり、b_y+b,x+b_η,b_tmp+b_m+Hが大きな値になりやすいため、計算の効率が落ちる可能性がある。このため、第2実施形態の変形例2では、ηとの乗算と1/mとの乗算をまとめてη/mとして処理することで処理回数を減らし、計算効率を向上させる。
第2実施形態のロジスティック回帰を行う際に、右シフトを用いてデータを秘匿したまま正規化を行ってもよい。例えば身長と年齢などの値域の異なるデータを全て0から1などの特定の範囲に収まるようにする前処理である正規化は、機械学習全般でよく用いられている。そのため、秘密計算上の機械学習を実運用可能なものにするためには、正規化を秘密計算上でできる必要がある。
第2実施形態のロジスティック回帰を行う際に、Nesterov Accelerated Gradient(NAG)法を適用してもよい。単純な勾配降下法を用いてパラメータ学習を行うと学習効率が良くないため、実際には学習効率を上げるために最適化手法を取り入れる場合が多い。しかし、多くの最適化手法は除算などの秘密計算が苦手とする計算を含むため、秘密計算でパラメータ学習を行う際に最適化手法を取り入れることは容易ではない。そのような状況の中で、NAG法は、加減乗算のみで実現できる最適化手法であり、低コストで秘密計算に取り入れることができる。
f(xi →)=σ(w→・(1,xi →))
wj,t+1=wj,t-vj,t+1
f(xi →)=σ(θ→・(1,xi →))
θ→=w→-αv→
本発明の装置は、例えば単一のハードウェアエンティティとして、キーボードなどが接続可能な入力部、液晶ディスプレイなどが接続可能な出力部、ハードウェアエンティティの外部に通信可能な通信装置(例えば通信ケーブル)が接続可能な通信部、CPU(Central Processing Unit、キャッシュメモリやレジスタなどを備えていてもよい)、メモリであるRAMやROM、ハードディスクである外部記憶装置並びにこれらの入力部、出力部、通信部、CPU、RAM、ROM、外部記憶装置の間のデータのやり取りが可能なように接続するバスを有している。また必要に応じて、ハードウェアエンティティに、CD-ROMなどの記録媒体を読み書きできる装置(ドライブ)などを設けることとしてもよい。このようなハードウェア資源を備えた物理的実体としては、汎用コンピュータなどがある。
Claims (13)
- mapσをシグモイド関数σ(x)の定義域を表すパラメータ(a0, …, ak-1)と値域を表すパラメータ(σ(a0), …, σ(ak-1)) (ただし、kは1以上の整数、a0, …, ak-1はa0<…<ak-1を満たす実数)により定義される秘密一括写像とし、
3個以上の秘密シグモイド関数計算装置で構成され、入力ベクトルx→=(x0, …, xm-1)のシェア[[x→]]=([[x0]], …, [[xm-1]])から、入力ベクトルx→に対するシグモイド関数の値y→=(y0, …, ym-1)のシェア[[y→]]=([[y0]], …, [[ym-1]])を計算する秘密シグモイド関数計算システムであって、
前記シェア[[x→]]から、mapσ([[x→]])=([[σ(af(0))]], …, [[σ(af(m-1))]])(ただし、f(i)(0≦i≦m-1)は、aj≦xi<aj+1となるj)を計算し、([[y0]], …, [[ym-1]])=([[σ(af(0))]], …, [[σ(af(m-1))]])により、前記シェア[[y→]]を計算する秘密一括写像計算手段と
を含む秘密シグモイド関数計算システム。 - mを1以上の整数、ηを0<η<1を満たす実数、Sigmoid([[x]])を請求項1に記載の秘密シグモイド関数計算システムを用いて入力ベクトルx→のシェア[[x→]]から、入力ベクトルx→に対するシグモイド関数の値y→のシェア[[y→]]を計算する関数とし、
3個以上の秘密ロジスティック回帰計算装置で構成され、説明変数のデータxi →のシェア[[xi →]](0≦i≦m-1)、目的変数のデータyiのシェア[[yi]](0≦i≦m-1)から、ロジスティック回帰モデルのモデルパラメータw→のシェア[[w→]]を計算する秘密ロジスティック回帰計算システムであって、
モデルパラメータw→の初期値w0 →のシェア[[w0 →]]を設定する初期化手段と、
i=0, …, m-1に対して、t回更新を行ったモデルパラメータw→の値wt →のシェア[[wt →]]と前記シェア[[xi →]]から、[[bi]]=hpsum([[wt →]], [[(1, xi →)]])により、[[bi]]を計算し、
前記[[bi]] (0≦i≦m-1)から、([[c0]],…, [[cm-1]])=Sigmoid(([[b0]],…, [[bm-1]]))により、([[c0]],…, [[cm-1]])を計算し、
i=0, …, m-1に対して、前記シェア[[yi]]と前記([[c0]],…, [[cm-1]])の第i要素[[ci]]から、[[di]]=[[ci]]-[[yi]]により、誤差[[di]]を計算する誤差計算手段と、
j=0, …, nに対して、
前記誤差[[di]] (0≦i≦m-1)と前記シェア[[xi →]]の第j要素[[xi,j]] (0≦i≦m-1)から、[[e]]=Σi=0 m-1[[di]][[xi,j]]により、[[e]]を計算し、
前記シェア[[wt →]]の第j要素[[wj,t]]と前記[[e]]から、[[wj,t+1]]=[[wj,t]]-η(1/m)[[e]]により、t+1回更新を行ったモデルパラメータw→の値wt+1 →のシェア[[wt+1 →]]の第j要素[[wj,t+1]]を計算するモデルパラメータ更新手段と
を含む秘密ロジスティック回帰計算システム。 - mを1以上の整数、ηを0<η<1を満たす実数、Sigmoid([[x]])を請求項1に記載の秘密シグモイド関数計算システムを用いて入力ベクトルx→のシェア[[x→]]から、入力ベクトルx→に対するシグモイド関数の値y→のシェア[[y→]]を計算する関数とし、
秘密計算の対象となる任意の値をpとし、pの精度をb_p[bit]と表記した場合には、pのシェア[[p]]は実際には[[p×2b_p]]という固定小数点数のシェアであることを表し、
秘密計算の対象となる任意のベクトルをq→とし、q→の要素をqiとし、q→の精度をb_q[bit]と表記した場合には、q→のシェア[[q→]]は実際には[[qi×2b_q]]という固定小数点数のシェアにより構成されることを表し、
w→,w0 →,wt →,wt+1 →,eta_grad_ave_shiftの精度をb_w[bit]と表記し、xi →(0≦i≦m-1)の精度をb_x[bit]と表記し、yi(0≦i≦m-1),ci(0≦i≦m-1),di(0≦i≦m-1)の精度をb_y[bit]と表記し、ηの精度をb_η[bit]と表記し、学習データ数の逆数1/mの精度をb_m+H[bit]と表記し、bi(0≦i≦m-1)の精度をb_w+b_x[bit]と表記し、eの精度をb_y+b_x[bit]と表記し、eta_gradの精度をb_y+b_x+b_η[bit]と表記し、eta_grad_shiftの精度をb_tmp[bit]と表記し、eta_grad_aveの精度をb_tmp+b_m+H[bit]と表記し、
b_w,b_x,b_y,b_η,b_m,H,b_tmpを予め定められた正の整数とし、
rshift(a,b)は、aという値をb[bit]だけ算術右シフトすることを表わすとして、
3個以上の秘密ロジスティック回帰計算装置で構成され、説明変数のデータxi →のシェア[[xi →]](0≦i≦m-1)、目的変数のデータyiのシェア[[yi]](0≦i≦m-1)から、ロジスティック回帰モデルのモデルパラメータw→のシェア[[w→]]を計算する秘密ロジスティック回帰計算システムであって、
モデルパラメータw→の初期値w0 →のシェア[[w0 →]]を設定する初期化手段と、
i=0, …, m-1に対して、t回更新を行ったモデルパラメータw→の値wt →のシェア[[wt →]]と前記シェア[[xi →]]から、[[bi]]=hpsum([[wt →]], [[(1, xi →)]])により、[[bi]]を計算し、
前記[[bi]] (0≦i≦m-1)から、([[c0]],…, [[cm-1]])=Sigmoid(([[b0]],…, [[bm-1]]))により、([[c0]],…, [[cm-1]])を計算し、
i=0, …, m-1に対して、前記シェア[[yi]]と前記([[c0]],…, [[cm-1]])の第i要素[[ci]]から、[[di]]=[[ci]]-[[yi]]により、誤差[[di]]を計算する誤差計算手段と、
j=0, …, nに対して、
前記誤差[[di]] (0≦i≦m-1)と前記シェア[[xi →]]の第j要素[[xi,j]] (0≦i≦m-1)から、[[e]]=Σi=0 m-1[[di]][[xi,j]]により、[[e]]を計算し、
前記η及び前記[[e]]から、[[eta_grad]]=η[[e]]により、[[eta_grad]]を計算し、
前記[[eta_grad]]から、[[eta_grad_shift]]=rshift([[eta_grad]], b_y+b_x+b_η-b_tmp)により、[[eta_grad_shift]]を計算し、
前記[[eta_grad_shift]]から、[[eta_grad_ave]]=(1/m)[[eta_grad_shift]]により、[[eta_grad_ave]]を計算し、
前記[[eta_grad_ave]]から、[[eta_grad_ave_shift]]=rshift([[eta_grad_ave]], b_tmp+b_m+H-b_w)により、[[eta_grad_ave_shift]]を計算し、
前記シェア[[wt →]]の第j要素[[wj,t]]と前記[[eta_grad_ave_shift]]から、[[wj,t+1]]=[[wj,t]]-[[eta_grad_ave_shift]]により、t+1回更新を行ったモデルパラメータw→の値wt+1 →のシェア[[wt+1 →]]の第j要素[[wj,t+1]]を計算するモデルパラメータ更新手段と
を含む秘密ロジスティック回帰計算システム。 - mを1以上の整数、ηを0<η<1を満たす実数、Sigmoid([[x]])を請求項1に記載の秘密シグモイド関数計算システムを用いて入力ベクトルx→のシェア[[x→]]から、入力ベクトルx→に対するシグモイド関数の値y→のシェア[[y→]]を計算する関数とし、
秘密計算の対象となる任意の値をpとし、pの精度をb_p[bit]と表記した場合には、pのシェア[[p]]は実際には[[p×2b_p]]という固定小数点数のシェアであることを表し、
秘密計算の対象となる任意のベクトルをq→とし、q→の要素をqiとし、q→の精度をb_q[bit]と表記した場合には、q→のシェア[[q→]]は実際には[[qi×2b_q]]という固定小数点数のシェアにより構成されることを表し、
w→,w0 →,wt →,wt+1 →,eta_grad_aveの精度をb_w[bit]と表記し、xi →(0≦i≦m-1)の精度をb_x[bit]と表記し、yi(0≦i≦m-1),ci(0≦i≦m-1),di(0≦i≦m-1)の精度をb_y[bit]と表記し、ηの精度をb_η[bit]と表記し、bi(0≦i≦m-1)の精度をb_w+b_x[bit]と表記し、eの精度をb_y+b_x[bit]と表記し、
b_w,b_x,b_y,b_ηを予め定められた正の整数とし、
rshift(a,b)は、aという値をb[bit]だけ算術右シフトすることを表わすとし、
floorは切り捨てを表す関数とし、X=-(floor(log2(η/m)))として、
3個以上の秘密ロジスティック回帰計算装置で構成され、説明変数のデータxi →のシェア[[xi →]](0≦i≦m-1)、目的変数のデータyiのシェア[[yi]](0≦i≦m-1)から、ロジスティック回帰モデルのモデルパラメータw→のシェア[[w→]]を計算する秘密ロジスティック回帰計算システムであって、
モデルパラメータw→の初期値w0 →のシェア[[w0 →]]を設定する初期化手段と、
i=0, …, m-1に対して、t回更新を行ったモデルパラメータw→の値wt →のシェア[[wt →]]と前記シェア[[xi →]]から、[[bi]]=hpsum([[wt →]], [[(1, xi →)]])により、[[bi]]を計算し、
前記[[bi]] (0≦i≦m-1)から、([[c0]],…, [[cm-1]])=Sigmoid(([[b0]],…, [[bm-1]]))により、([[c0]],…, [[cm-1]])を計算し、
i=0, …, m-1に対して、前記シェア[[yi]]と前記([[c0]],…, [[cm-1]])の第i要素[[ci]]から、[[di]]=[[ci]]-[[yi]]により、誤差[[di]]を計算する誤差計算手段と、
j=0, …, nに対して、
前記誤差[[di]] (0≦i≦m-1)と前記シェア[[xi →]]の第j要素[[xi,j]] (0≦i≦m-1)から、[[e]]=Σi=0 m-1[[di]][[xi,j]]により、[[e]]を計算し、
前記[[e]]から、[[eta_grad_ave]]=rshift([[e]], X+b_y+b_x-b_w)により、[[eta_grad_ave]]を計算し、
前記シェア[[wt →]]の第j要素[[wj,t]]と前記[[eta_grad_ave]]から、[[wj,t+1]]=[[wj,t]]-[[eta_grad_ave]]により、t+1回更新を行ったモデルパラメータw→の値wt+1 →のシェア[[wt+1 →]]の第j要素[[wj,t+1]]を計算するモデルパラメータ更新手段と
を含む秘密ロジスティック回帰計算システム。 - mapσをシグモイド関数σ(x)の定義域を表すパラメータ(a0, …, ak-1)と値域を表すパラメータ(σ(a0), …, σ(ak-1)) (ただし、kは1以上の整数、a0, …, ak-1はa0<…<ak-1を満たす実数)により定義される秘密一括写像とし、
入力ベクトルx→=(x0, …, xm-1)のシェア[[x→]]=([[x0]], …, [[xm-1]])から、入力ベクトルx→に対するシグモイド関数の値y→=(y0, …, ym-1)のシェア[[y→]]=([[y0]], …, [[ym-1]])を計算する、3個以上の秘密シグモイド関数計算装置で構成される秘密シグモイド関数計算システムの中の秘密シグモイド関数計算装置であって、
前記シェア[[x→]]から、mapσ([[x→]])=([[σ(af(0))]], …, [[σ(af(m-1))]])(ただし、f(i)(0≦i≦m-1)は、aj≦xi<aj+1となるj)を計算し、([[y0]], …, [[ym-1]])=([[σ(af(0))]], …, [[σ(af(m-1))]])により、前記シェア[[y→]]を計算するための秘密一括写像計算部と
を含む秘密シグモイド関数計算装置。 - mを1以上の整数、ηを0<η<1を満たす実数、Sigmoid([[x]])を、3個以上の、請求項5に記載の秘密シグモイド関数計算装置で構成される秘密シグモイド関数計算システムを用いて入力ベクトルx→のシェア[[x→]]から、入力ベクトルx→に対するシグモイド関数の値y→のシェア[[y→]]を計算する関数とし、
説明変数のデータxi →のシェア[[xi →]](0≦i≦m-1)、目的変数のデータyiのシェア[[yi]](0≦i≦m-1)から、ロジスティック回帰モデルのモデルパラメータw→のシェア[[w→]]を計算する、3個以上の秘密ロジスティック回帰計算装置で構成される秘密ロジスティック回帰計算システムの中の秘密ロジスティック回帰計算装置であって、
モデルパラメータw→の初期値w0 →のシェア[[w0 →]]を設定するための初期化部と、
i=0, …, m-1に対して、t回更新を行ったモデルパラメータw→の値wt →のシェア[[wt →]]と前記シェア[[xi →]]から、[[bi]]=hpsum([[wt →]], [[(1, xi →)]])により、[[bi]]を計算し、
前記[[bi]] (0≦i≦m-1)から、([[c0]],…, [[cm-1]])=Sigmoid(([[b0]],…, [[bm-1]]))により、([[c0]],…, [[cm-1]])を計算し、
i=0, …, m-1に対して、前記シェア[[yi]]と前記([[c0]],…, [[cm-1]])の第i要素[[ci]]から、[[di]]=[[ci]]-[[yi]]により、誤差[[di]]を計算するための誤差計算部と、
j=0, …, nに対して、
前記誤差[[di]] (0≦i≦m-1)と前記シェア[[xi →]]の第j要素[[xi,j]] (0≦i≦m-1)から、[[e]]=Σi=0 m-1[[di]][[xi,j]]により、[[e]]を計算し、
前記シェア[[wt →]]の第j要素[[wj,t]]と前記[[e]]から、[[wj,t+1]]=[[wj,t]]-η(1/m)[[e]]により、t+1回更新を行ったモデルパラメータw→の値wt+1 →のシェア[[wt+1 →]]の第j要素[[wj,t+1]]を計算するためのモデルパラメータ更新部と
を含む秘密ロジスティック回帰計算装置。 - mを1以上の整数、ηを0<η<1を満たす実数、Sigmoid([[x]])を請求項5に記載の秘密シグモイド関数計算システムを用いて入力ベクトルx→のシェア[[x→]]から、入力ベクトルx→に対するシグモイド関数の値y→のシェア[[y→]]を計算する関数とし、
秘密計算の対象となる任意の値をpとし、pの精度をb_p[bit]と表記した場合には、pのシェア[[p]]は実際には[[p×2b_p]]という固定小数点数のシェアであることを表し、
秘密計算の対象となる任意のベクトルをq→とし、q→の要素をqiとし、q→の精度をb_q[bit]と表記した場合には、q→のシェア[[q→]]は実際には[[qi×2b_q]]という固定小数点数のシェアにより構成されることを表し、
w→,w0 →,wt →,wt+1 →,eta_grad_ave_shiftの精度をb_w[bit]と表記し、xi →(0≦i≦m-1)の精度をb_x[bit]と表記し、yi(0≦i≦m-1),ci(0≦i≦m-1),di(0≦i≦m-1)の精度をb_y[bit]と表記し、ηの精度をb_η[bit]と表記し、学習データ数の逆数1/mの精度をb_m+H[bit]と表記し、bi(0≦i≦m-1)の精度をb_w+b_x[bit]と表記し、eの精度をb_y+b_x[bit]と表記し、eta_gradの精度をb_y+b_x+b_η[bit]と表記し、eta_grad_shiftの精度をb_tmp[bit]と表記し、eta_grad_aveの精度をb_tmp+b_m+H[bit]と表記し、
b_w,b_x,b_y,b_η,b_m,H,b_tmpを予め定められた正の整数とし、
rshift(a,b)は、aという値をb[bit]だけ算術右シフトすることを表わすとして、
3個以上の秘密ロジスティック回帰計算装置で構成され、説明変数のデータxi →のシェア[[xi →]](0≦i≦m-1)、目的変数のデータyiのシェア[[yi]](0≦i≦m-1)から、ロジスティック回帰モデルのモデルパラメータw→のシェア[[w→]]を計算する秘密ロジスティック回帰計算システムの中の秘密ロジスティック回帰計算装置であって、
モデルパラメータw→の初期値w0 →のシェア[[w0 →]]を設定する初期化手段と、
i=0, …, m-1に対して、t回更新を行ったモデルパラメータw→の値wt →のシェア[[wt →]]と前記シェア[[xi →]]から、[[bi]]=hpsum([[wt →]], [[(1, xi →)]])により、[[bi]]を計算し、
前記[[bi]] (0≦i≦m-1)から、([[c0]],…, [[cm-1]])=Sigmoid(([[b0]],…, [[bm-1]]))により、([[c0]],…, [[cm-1]])を計算し、
i=0, …, m-1に対して、前記シェア[[yi]]と前記([[c0]],…, [[cm-1]])の第i要素[[ci]]から、[[di]]=[[ci]]-[[yi]]により、誤差[[di]]を計算する誤差計算手段と、
j=0, …, nに対して、
前記誤差[[di]] (0≦i≦m-1)と前記シェア[[xi →]]の第j要素[[xi,j]] (0≦i≦m-1)から、[[e]]=Σi=0 m-1[[di]][[xi,j]]により、[[e]]を計算し、
前記η及び前記[[e]]から、[[eta_grad]]=η[[e]]により、[[eta_grad]]を計算し、
前記[[eta_grad]]から、[[eta_grad_shift]]=rshift([[eta_grad]], b_y+b_x+b_η-b_tmp)により、[[eta_grad_shift]]を計算し、
前記[[eta_grad_shift]]から、[[eta_grad_ave]]=(1/m)[[eta_grad_shift]]により、[[eta_grad_ave]]を計算し、
前記[[eta_grad_ave]]から、[[eta_grad_ave_shift]]=rshift([[eta_grad_ave]], b_tmp+b_m+H-b_w)により、[[eta_grad_ave_shift]]を計算し、
前記シェア[[wt →]]の第j要素[[wj,t]]と前記[[eta_grad_ave_shift]]から、[[wj,t+1]]=[[wj,t]]-[[eta_grad_ave_shift]]により、t+1回更新を行ったモデルパラメータw→の値wt+1 →のシェア[[wt+1 →]]の第j要素[[wj,t+1]]を計算するモデルパラメータ更新手段と
を含む秘密ロジスティック回帰計算装置。 - mを1以上の整数、ηを0<η<1を満たす実数、Sigmoid([[x]])を請求項5に記載の秘密シグモイド関数計算システムを用いて入力ベクトルx→のシェア[[x→]]から、入力ベクトルx→に対するシグモイド関数の値y→のシェア[[y→]]を計算する関数とし、
秘密計算の対象となる任意の値をpとし、pの精度をb_p[bit]と表記した場合には、pのシェア[[p]]は実際には[[p×2b_p]]という固定小数点数のシェアであることを表し、
秘密計算の対象となる任意のベクトルをq→とし、q→の要素をqiとし、q→の精度をb_q[bit]と表記した場合には、q→のシェア[[q→]]は実際には[[qi×2b_q]]という固定小数点数のシェアにより構成されることを表し、
w→,w0 →,wt →,wt+1 →,eta_grad_aveの精度をb_w[bit]と表記し、xi →(0≦i≦m-1)の精度をb_x[bit]と表記し、yi(0≦i≦m-1),ci(0≦i≦m-1),di(0≦i≦m-1)の精度をb_y[bit]と表記し、ηの精度をb_η[bit]と表記し、bi(0≦i≦m-1)の精度をb_w+b_x[bit]と表記し、eの精度をb_y+b_x[bit]と表記し、
b_w,b_x,b_y,b_ηを予め定められた正の整数とし、
rshift(a,b)は、aという値をb[bit]だけ算術右シフトすることを表わすとし、
floorは切り捨てを表す関数とし、X=-(floor(log2(η/m)))として、
3個以上の秘密ロジスティック回帰計算装置で構成され、説明変数のデータxi →のシェア[[xi →]](0≦i≦m-1)、目的変数のデータyiのシェア[[yi]](0≦i≦m-1)から、ロジスティック回帰モデルのモデルパラメータw→のシェア[[w→]]を計算する秘密ロジスティック回帰計算システムの中の秘密ロジスティック回帰計算装置であって、
モデルパラメータw→の初期値w0 →のシェア[[w0 →]]を設定する初期化手段と、
i=0, …, m-1に対して、t回更新を行ったモデルパラメータw→の値wt →のシェア[[wt →]]と前記シェア[[xi →]]から、[[bi]]=hpsum([[wt →]], [[(1, xi →)]])により、[[bi]]を計算し、
前記[[bi]] (0≦i≦m-1)から、([[c0]],…, [[cm-1]])=Sigmoid(([[b0]],…, [[bm-1]]))により、([[c0]],…, [[cm-1]])を計算し、
i=0, …, m-1に対して、前記シェア[[yi]]と前記([[c0]],…, [[cm-1]])の第i要素[[ci]]から、[[di]]=[[ci]]-[[yi]]により、誤差[[di]]を計算する誤差計算手段と、
j=0, …, nに対して、
前記誤差[[di]] (0≦i≦m-1)と前記シェア[[xi →]]の第j要素[[xi,j]] (0≦i≦m-1)から、[[e]]=Σi=0 m-1[[di]][[xi,j]]により、[[e]]を計算し、
前記[[e]]から、[[eta_grad_ave]]=rshift([[e]], X+b_y+b_x-b_w)により、[[eta_grad_ave]]を計算し、
前記シェア[[wt →]]の第j要素[[wj,t]]と前記[[eta_grad_ave]]から、[[wj,t+1]]=[[wj,t]]-[[eta_grad_ave]]により、t+1回更新を行ったモデルパラメータw→の値wt+1 →のシェア[[wt+1 →]]の第j要素[[wj,t+1]]を計算するモデルパラメータ更新手段と
を含む秘密ロジスティック回帰計算装置。 - mapσをシグモイド関数σ(x)の定義域を表すパラメータ(a0, …, ak-1)と値域を表すパラメータ(σ(a0), …, σ(ak-1)) (ただし、kは1以上の整数、a0, …, ak-1はa0<…<ak-1を満たす実数)により定義される秘密一括写像とし、
3個以上の秘密シグモイド関数計算装置で構成される秘密シグモイド関数計算システムが、入力ベクトルx→=(x0, …, xm-1)のシェア[[x→]]=([[x0]], …, [[xm-1]])から、入力ベクトルx→に対するシグモイド関数の値y→=(y0, …, ym-1)のシェア[[y→]]=([[y0]], …, [[ym-1]])を計算する秘密シグモイド関数計算方法であって、
前記秘密シグモイド関数計算システムが、前記シェア[[x→]]から、mapσ([[x→]])=([[σ(af(0))]], …, [[σ(af(m-1))]])(ただし、f(i)(0≦i≦m-1)は、aj≦xi<aj+1となるj)を計算し、([[y0]], …, [[ym-1]])= ([[σ(af(0))]], …, [[σ(af(m-1))]])により、前記シェア[[y→]]を計算する秘密一括写像計算ステップと
を含む秘密シグモイド関数計算方法。 - mを1以上の整数、ηを0<η<1を満たす実数、Sigmoid([[x]])を請求項9に記載の秘密シグモイド関数計算方法を用いて入力ベクトルx→のシェア[[x→]]から、入力ベクトルx→に対するシグモイド関数の値y→のシェア[[y→]]を計算する関数とし、
3個以上の秘密ロジスティック回帰計算装置で構成される秘密ロジスティック回帰計算システムが、説明変数のデータxi →のシェア[[xi →]](0≦i≦m-1)、目的変数のデータyiのシェア[[yi]](0≦i≦m-1)から、ロジスティック回帰モデルのモデルパラメータw→のシェア[[w→]]を計算する秘密ロジスティック回帰計算方法であって、
前記秘密ロジスティック回帰計算システムが、モデルパラメータw→の初期値w0 →のシェア[[w0 →]]を設定する初期化ステップと、
前記秘密ロジスティック回帰計算システムが、i=0, …, m-1に対して、t回更新を行ったモデルパラメータw→の値wt →のシェア[[wt →]]と前記シェア[[xi →]]から、[[bi]]=hpsum([[wt →]], [[(1, xi →)]])により、[[bi]]を計算し、
前記[[bi]] (0≦i≦m-1)から、([[c0]],…, [[cm-1]])=Sigmoid(([[b0]],…, [[bm-1]]))により、([[c0]],…, [[cm-1]])を計算し、
i=0, …, m-1に対して、前記シェア[[yi]]と前記([[c0]],…, [[cm-1]])の第i要素[[ci]]から、[[di]]=[[ci]]-[[yi]]により、誤差[[di]]を計算する誤差計算ステップと、
前記秘密ロジスティック回帰計算システムが、j=0, …, nに対して、
前記誤差[[di]] (0≦i≦m-1)と前記シェア[[xi →]]の第j要素[[xi,j]] (0≦i≦m-1)から、[[e]]=Σi=0 m-1[[di]][[xi,j]]により、[[e]]を計算し、
前記シェア[[wt →]]の第j要素[[wj,t]]と前記[[e]]から、[[wj,t+1]]=[[wj,t]]-η(1/m)[[e]]により、t+1回更新を行ったモデルパラメータw→の値wt+1 →のシェア[[wt+1 →]]の第j要素[[wj,t+1]]を計算するモデルパラメータ更新ステップと
を含む秘密ロジスティック回帰計算方法。 - mを1以上の整数、ηを0<η<1を満たす実数、Sigmoid([[x]])を請求項9に記載の秘密シグモイド関数計算方法を用いて入力ベクトルx→のシェア[[x→]]から、入力ベクトルx→に対するシグモイド関数の値y→のシェア[[y→]]を計算する関数とし、
秘密計算の対象となる任意の値をpとし、pの精度をb_p[bit]と表記した場合には、pのシェア[[p]]は実際には[[p×2b_p]]という固定小数点数のシェアであることを表し、
秘密計算の対象となる任意のベクトルをq→とし、q→の要素をqiとし、q→の精度をb_q[bit]と表記した場合には、q→のシェア[[q→]]は実際には[[qi×2b_q]]という固定小数点数のシェアにより構成されることを表し、
w→,w0 →,wt →,wt+1 →,eta_grad_ave_shiftの精度をb_w[bit]と表記し、xi →(0≦i≦m-1)の精度をb_x[bit]と表記し、yi(0≦i≦m-1),ci(0≦i≦m-1),di(0≦i≦m-1)の精度をb_y[bit]と表記し、ηの精度をb_η[bit]と表記し、学習データ数の逆数1/mの精度をb_m+H[bit]と表記し、bi(0≦i≦m-1)の精度をb_w+b_x[bit]と表記し、eの精度をb_y+b_x[bit]と表記し、eta_gradの精度をb_y+b_x+b_η[bit]と表記し、eta_grad_shiftの精度をb_tmp[bit]と表記し、eta_grad_aveの精度をb_tmp+b_m+H[bit]と表記し、
b_w,b_x,b_y,b_η,b_m,H,b_tmpを予め定められた正の整数とし、
rshift(a,b)は、aという値をb[bit]だけ算術右シフトすることを表わすとして、
3個以上の秘密ロジスティック回帰計算装置で構成される秘密ロジスティック回帰計算システムが、説明変数のデータxi →のシェア[[xi →]](0≦i≦m-1)、目的変数のデータyiのシェア[[yi]](0≦i≦m-1)から、ロジスティック回帰モデルのモデルパラメータw→のシェア[[w→]]を計算する秘密ロジスティック回帰計算方法であって、
前記秘密ロジスティック回帰計算システムが、モデルパラメータw→の初期値w0 →のシェア[[w0 →]]を設定する初期化ステップと、
前記秘密ロジスティック回帰計算システムが、i=0, …, m-1に対して、t回更新を行ったモデルパラメータw→の値wt →のシェア[[wt →]]と前記シェア[[xi →]]から、[[bi]]=hpsum([[wt →]], [[(1, xi →)]])により、[[bi]]を計算し、
前記[[bi]] (0≦i≦m-1)から、([[c0]],…, [[cm-1]])=Sigmoid(([[b0]],…, [[bm-1]]))により、([[c0]],…, [[cm-1]])を計算し、
i=0, …, m-1に対して、前記シェア[[yi]]と前記([[c0]],…, [[cm-1]])の第i要素[[ci]]から、[[di]]=[[ci]]-[[yi]]により、誤差[[di]]を計算する誤差計算ステップと、
前記秘密ロジスティック回帰計算システムが、j=0, …, nに対して、
前記誤差[[di]] (0≦i≦m-1)と前記シェア[[xi →]]の第j要素[[xi,j]] (0≦i≦m-1)から、[[e]]=Σi=0 m-1[[di]][[xi,j]]により、[[e]]を計算し、
前記η及び前記[[e]]から、[[eta_grad]]=η[[e]]により、[[eta_grad]]を計算し、
前記[[eta_grad]]から、[[eta_grad_shift]]=rshift([[eta_grad]], b_y+b_x+b_η-b_tmp)により、[[eta_grad_shift]]を計算し、
前記[[eta_grad_shift]]から、[[eta_grad_ave]]=(1/m)[[eta_grad_shift]]により、[[eta_grad_ave]]を計算し、
前記[[eta_grad_ave]]から、[[eta_grad_ave_shift]]=rshift([[eta_grad_ave]], b_tmp+b_m+H-b_w)により、[[eta_grad_ave_shift]]を計算し、
前記シェア[[wt →]]の第j要素[[wj,t]]と前記[[eta_grad_ave_shift]]から、[[wj,t+1]]=[[wj,t]]-[[eta_grad_ave_shift]]により、t+1回更新を行ったモデルパラメータw→の値wt+1 →のシェア[[wt+1 →]]の第j要素[[wj,t+1]]を計算するモデルパラメータ更新ステップと
を含む秘密ロジスティック回帰計算方法。 - mを1以上の整数、ηを0<η<1を満たす実数、Sigmoid([[x]])を請求項9に記載の秘密シグモイド関数計算方法を用いて入力ベクトルx→のシェア[[x→]]から、入力ベクトルx→に対するシグモイド関数の値y→のシェア[[y→]]を計算する関数とし、
秘密計算の対象となる任意の値をpとし、pの精度をb_p[bit]と表記した場合には、pのシェア[[p]]は実際には[[p×2b_p]]という固定小数点数のシェアであることを表し、
秘密計算の対象となる任意のベクトルをq→とし、q→の要素をqiとし、q→の精度をb_q[bit]と表記した場合には、q→のシェア[[q→]]は実際には[[qi×2b_q]]という固定小数点数のシェアにより構成されることを表し、
w→,w0 →,wt →,wt+1 →,eta_grad_aveの精度をb_w[bit]と表記し、xi →(0≦i≦m-1)の精度をb_x[bit]と表記し、yi(0≦i≦m-1),ci(0≦i≦m-1),di(0≦i≦m-1)の精度をb_y[bit]と表記し、ηの精度をb_η[bit]と表記し、bi(0≦i≦m-1)の精度をb_w+b_x[bit]と表記し、eの精度をb_y+b_x[bit]と表記し、
b_w,b_x,b_y,b_ηを予め定められた正の整数とし、
rshift(a,b)は、aという値をb[bit]だけ算術右シフトすることを表わすとし、
floorは切り捨てを表す関数とし、X=-(floor(log2(η/m)))として、
3個以上の秘密ロジスティック回帰計算装置で構成される秘密ロジスティック回帰計算システムが、説明変数のデータxi →のシェア[[xi →]](0≦i≦m-1)、目的変数のデータyiのシェア[[yi]](0≦i≦m-1)から、ロジスティック回帰モデルのモデルパラメータw→のシェア[[w→]]を計算する秘密ロジスティック回帰計算方法であって、
前記秘密ロジスティック回帰計算システムが、モデルパラメータw→の初期値w0 →のシェア[[w0 →]]を設定する初期化ステップと、
前記秘密ロジスティック回帰計算システムが、i=0, …, m-1に対して、t回更新を行ったモデルパラメータw→の値wt →のシェア[[wt →]]と前記シェア[[xi →]]から、[[bi]]=hpsum([[wt →]], [[(1, xi →)]])により、[[bi]]を計算し、
前記[[bi]] (0≦i≦m-1)から、([[c0]],…, [[cm-1]])=Sigmoid(([[b0]],…, [[bm-1]]))により、([[c0]],…, [[cm-1]])を計算し、
i=0, …, m-1に対して、前記シェア[[yi]]と前記([[c0]],…, [[cm-1]])の第i要素[[ci]]から、[[di]]=[[ci]]-[[yi]]により、誤差[[di]]を計算する誤差計算ステップと、
前記秘密ロジスティック回帰計算システムが、j=0, …, nに対して、
前記誤差[[di]] (0≦i≦m-1)と前記シェア[[xi →]]の第j要素[[xi,j]] (0≦i≦m-1)から、[[e]]=Σi=0 m-1[[di]][[xi,j]]により、[[e]]を計算し、
前記[[e]]から、[[eta_grad_ave]]=rshift([[e]], X+b_y+b_x-b_w)により、[[eta_grad_ave]]を計算し、
前記シェア[[wt →]]の第j要素[[wj,t]]と前記[[eta_grad_ave]]から、[[wj,t+1]]=[[wj,t]]-[[eta_grad_ave]]により、t+1回更新を行ったモデルパラメータw→の値wt+1 →のシェア[[wt+1 →]]の第j要素[[wj,t+1]]を計算するモデルパラメータ更新ステップと
を含む秘密ロジスティック回帰計算方法。 - 請求項5に記載の秘密シグモイド関数計算装置または請求項6から8の何れかに記載の秘密ロジスティック回帰計算装置としてコンピュータを機能させるためのプログラム。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US17/279,595 US12518656B2 (en) | 2018-10-04 | 2019-10-02 | Secret sigmoid function calculation system, secret logistic regression calculation system, secret sigmoid function calculation apparatus, secret logistic regression calculation apparatus, secret sigmoid function calculation method, secret logistic regression calculation method and program |
| EP19868468.0A EP3863002B1 (en) | 2018-10-04 | 2019-10-02 | Hidden sigmoid function calculation system, hidden logistic regression calculation system, hidden sigmoid function calculation device, hidden logistic regression calculation device, hidden sigmoid function calculation method, hidden logistic regression calculation method, and program |
| CN201980064791.5A CN112805768B (zh) | 2018-10-04 | 2019-10-02 | 秘密s型函数计算系统及其方法、秘密逻辑回归计算系统及其方法、秘密s型函数计算装置、秘密逻辑回归计算装置、程序 |
| AU2019352310A AU2019352310B2 (en) | 2018-10-04 | 2019-10-02 | Secret sigmoid function calculation system, secret logistic regression calculation system, secret sigmoid function calculation apparatus, secret logistic regression calculation apparatus, secret sigmoid function calculation method, secret logistic regression calculation method and program |
| JP2020550513A JP7092206B2 (ja) | 2018-10-04 | 2019-10-02 | 秘密シグモイド関数計算システム、秘密ロジスティック回帰計算システム、秘密シグモイド関数計算装置、秘密ロジスティック回帰計算装置、秘密シグモイド関数計算方法、秘密ロジスティック回帰計算方法、プログラム |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018189297 | 2018-10-04 | ||
| JP2018-189297 | 2018-10-04 | ||
| JP2019003285 | 2019-01-11 | ||
| JP2019-003285 | 2019-01-11 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020071441A1 true WO2020071441A1 (ja) | 2020-04-09 |
Family
ID=70055631
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/038966 Ceased WO2020071441A1 (ja) | 2018-10-04 | 2019-10-02 | 秘密シグモイド関数計算システム、秘密ロジスティック回帰計算システム、秘密シグモイド関数計算装置、秘密ロジスティック回帰計算装置、秘密シグモイド関数計算方法、秘密ロジスティック回帰計算方法、プログラム |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US12518656B2 (ja) |
| EP (1) | EP3863002B1 (ja) |
| JP (1) | JP7092206B2 (ja) |
| CN (1) | CN112805768B (ja) |
| AU (1) | AU2019352310B2 (ja) |
| WO (1) | WO2020071441A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022203083A1 (ja) * | 2021-03-26 | 2022-09-29 | エヌ・ティ・ティ・コミュニケーションズ株式会社 | 学習プログラム、学習方法及び学習装置 |
| US11870893B2 (en) | 2021-02-10 | 2024-01-09 | Kabushiki Kaisha Toshiba | Secure computing method, secure computing system, and secure computing management device |
| WO2024241366A1 (ja) * | 2023-05-19 | 2024-11-28 | 日本電信電話株式会社 | 秘密計算装置、秘密計算方法、プログラム |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019225531A1 (ja) * | 2018-05-25 | 2019-11-28 | 日本電信電話株式会社 | 秘密一括近似システム、秘密計算装置、秘密一括近似方法、およびプログラム |
| JP6795863B1 (ja) * | 2020-01-24 | 2020-12-02 | Eaglys株式会社 | 秘密計算用変換装置、秘密計算システム、秘密計算用変換方法、および秘密計算用変換プログラム |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017119211A1 (ja) * | 2016-01-07 | 2017-07-13 | ソニー株式会社 | 情報処理装置、情報処理システム、および情報処理方法、並びにプログラム |
| US20180218171A1 (en) * | 2017-01-31 | 2018-08-02 | Hewlett Packard Enterprise Development Lp | Performing privacy-preserving multi-party analytics on horizontally partitioned local data |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA2155038C (en) * | 1995-07-31 | 2008-12-09 | Gordon B. Agnew | Elliptic curve encryption systems |
| JP5486520B2 (ja) * | 2011-01-21 | 2014-05-07 | 日本電信電話株式会社 | セキュア集合関数システム、秘密集合関数装置、セキュア集合関数処理方法、セキュア集合関数プログラム |
| US9064123B2 (en) * | 2011-03-10 | 2015-06-23 | Nippon Telegraph And Telephone Corporation | Secure product-sum combination system, computing apparatus, secure product-sum combination method and program therefor |
| JP5689826B2 (ja) * | 2012-01-26 | 2015-03-25 | 日本電信電話株式会社 | 秘密計算システム、暗号化装置、秘密計算装置及びその方法、プログラム |
| JP6006842B1 (ja) * | 2015-07-22 | 2016-10-12 | 日本電信電話株式会社 | 秘密計算装置、その方法、およびプログラム |
| EP3803714A4 (en) * | 2018-06-08 | 2022-03-09 | Zestfinance, Inc. | SYSTEMS AND METHODS FOR DECOMPOSING NON-differentiable and differentiable models |
| WO2019072315A2 (en) * | 2019-01-11 | 2019-04-18 | Alibaba Group Holding Limited | LOGISTIC REGRESSION MODELING SCHEME USING SECRET SHARING |
-
2019
- 2019-10-02 WO PCT/JP2019/038966 patent/WO2020071441A1/ja not_active Ceased
- 2019-10-02 CN CN201980064791.5A patent/CN112805768B/zh active Active
- 2019-10-02 EP EP19868468.0A patent/EP3863002B1/en active Active
- 2019-10-02 US US17/279,595 patent/US12518656B2/en active Active
- 2019-10-02 AU AU2019352310A patent/AU2019352310B2/en active Active
- 2019-10-02 JP JP2020550513A patent/JP7092206B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017119211A1 (ja) * | 2016-01-07 | 2017-07-13 | ソニー株式会社 | 情報処理装置、情報処理システム、および情報処理方法、並びにプログラム |
| US20180218171A1 (en) * | 2017-01-31 | 2018-08-02 | Hewlett Packard Enterprise Development Lp | Performing privacy-preserving multi-party analytics on horizontally partitioned local data |
Non-Patent Citations (12)
| Title |
|---|
| BEN-OR, M.GOLDWASSER, S.WIGDERSON, A.: "Proceedings of the twentieth annual ACM symposium on Theory of computing", 1988, ACM, article "Completeness theorems for non-cryptographic fault-tolerant distributed computation", pages: 1 - 10 |
| GENNARO, R.RABIN, M. O.RABIN, T.: "Proceedings of the seventeenth annual ACM symposium on Principles of distributed computing", 1998, ACM, article "Simplified VSS and fast-track multiparty computations with applications to threshold cryptography", pages: 101 - 111 |
| GO, SOU ET AL.: "Privacy-preserving Logistic RegressionAnalysis for Vertically Partitioned Data", PROCEEDINGS OF THE 28TH 2014 ANNUAL CONFERENCE OF THE JAPANESE SOCIETY FOR ARTIFICIAL INTELLIGENCE [CD-ROM], 15 May 2014 (2014-05-15), pages 1 - 4, XP009507440 * |
| KOJI CHIDAKOKI HAMADADAI IKARASHIKATSUMI TAKAHASHI: "A Three-party Secure Function Evaluation with Lightweight Verifiability Revisited", CSS, 2010 |
| KOKI HAMADADAI IKARASHIKOJI CHIDA: "A Batch Mapping Algorithm for Secure Function Evaluation", THE TRANSACTIONS OF THE INSTITUTE OF ELECTRONICS, INFORMATION AND COMMUNICATION ENGINEERS A, vol. J96-A, no. 4, 2013, pages 157 - 165, XP008184067 |
| KYOOHYUNG HANSEUNGWAN HONGJUNG HEE CHEONDAEJUN PARK, EFFICIENT LOGISTIC REGRESSION ON LARGE ENCRYPTED DATA, 2018, Retrieved from the Internet <URL:https://eprint.iacr.org/2018/662.pdf> |
| MISHINA, IBUKI ET AL.: "Designs and Implementations of Efficient and Accurate Secret Logistic Regression", PROCEEDINGS OF COMPUTER SECURITY SYMPOSIUM 2018 (CSS2018), 22-25 OCTOBER 2018, vol. 2018, no. 2, 15 October 2018 (2018-10-15), pages 1229 - 1236, XP009522747 * |
| See also references of EP3863002A4 |
| SHAMIR, A.: "How to share a secure", COMMUNICATIONS OF THE ACM, vol. 22, no. 11, 1979, pages 612 - 613 |
| SHUANG WUTADANORI TERUYAJUNPEI KAWAMOTOJUN SAKUMAHIROAKI KIKUCHI: "the collection of papers of the 27th Annual Conference of the Japanese Society for Artificial Intelligence", 2013, JAPANESE SOCIETY FOR ARTIFICIAL INTELLIGENCE, article "Privacy-preservation for stochastic gradient descent" |
| TANAKA, SATOSHI ET AL.: "Cost Evaluation of Neural Network using Secretsharing-based Secure Computation", IEICE TECHNICAL REPORT, vol. 116, no. 65, 19 May 2016 (2016-05-19), pages 119 - 126, XP009523659 * |
| YOSHINORI AONOTAKUYA HAYASHILE TRIEU PHONGLIHUA WANG: "Proposal for Large-Scale and Privacy-Preserving Logistic Analysis Technique", SCIS2016, 2016 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11870893B2 (en) | 2021-02-10 | 2024-01-09 | Kabushiki Kaisha Toshiba | Secure computing method, secure computing system, and secure computing management device |
| WO2022203083A1 (ja) * | 2021-03-26 | 2022-09-29 | エヌ・ティ・ティ・コミュニケーションズ株式会社 | 学習プログラム、学習方法及び学習装置 |
| JP2022150498A (ja) * | 2021-03-26 | 2022-10-07 | エヌ・ティ・ティ・コミュニケーションズ株式会社 | 学習プログラム、学習方法及び学習装置 |
| AU2022243369B2 (en) * | 2021-03-26 | 2025-06-19 | NTT DOCOMO BUSINESS, Inc. | Learning program, learning method, and learning device |
| WO2024241366A1 (ja) * | 2023-05-19 | 2024-11-28 | 日本電信電話株式会社 | 秘密計算装置、秘密計算方法、プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| CN112805768A (zh) | 2021-05-14 |
| EP3863002A4 (en) | 2022-06-22 |
| EP3863002B1 (en) | 2023-02-15 |
| CN112805768B (zh) | 2023-08-04 |
| EP3863002A1 (en) | 2021-08-11 |
| JP7092206B2 (ja) | 2022-06-28 |
| AU2019352310B2 (en) | 2022-07-28 |
| AU2019352310A1 (en) | 2021-05-13 |
| JPWO2020071441A1 (ja) | 2021-09-02 |
| US20210358332A1 (en) | 2021-11-18 |
| US12518656B2 (en) | 2026-01-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7092206B2 (ja) | 秘密シグモイド関数計算システム、秘密ロジスティック回帰計算システム、秘密シグモイド関数計算装置、秘密ロジスティック回帰計算装置、秘密シグモイド関数計算方法、秘密ロジスティック回帰計算方法、プログラム | |
| US11164484B2 (en) | Secure computation system, secure computation device, secure computation method, and program | |
| JP7067632B2 (ja) | 秘密シグモイド関数計算システム、秘密ロジスティック回帰計算システム、秘密シグモイド関数計算装置、秘密ロジスティック回帰計算装置、秘密シグモイド関数計算方法、秘密ロジスティック回帰計算方法、プログラム | |
| JP6766182B2 (ja) | 秘密計算システム、秘密計算装置、秘密計算方法、プログラム | |
| JP7067633B2 (ja) | 秘密右シフト演算システム、秘密除算システム、それらの方法、秘密計算装置、およびプログラム | |
| JP7226562B2 (ja) | 秘密ソフトマックス関数計算システム、秘密ソフトマックス関数計算装置、秘密ソフトマックス関数計算方法、秘密ニューラルネットワーク計算システム、秘密ニューラルネットワーク学習システム、プログラム | |
| JP2019095635A (ja) | 処理装置、推論装置、学習装置、処理システム、処理方法、及び処理プログラム | |
| JPWO2018135511A1 (ja) | 秘密計算方法、秘密計算システム、秘密計算装置、およびプログラム | |
| Prantl et al. | De Bello Homomorphico: Investigation of the extensibility of the OpenFHE library with basic mathematical functions by means of common approaches using the example of the CKKS cryptosystem | |
| WO2019225531A1 (ja) | 秘密一括近似システム、秘密計算装置、秘密一括近似方法、およびプログラム | |
| JP7205623B2 (ja) | 秘密共役勾配法計算システム、秘密計算装置、共役勾配法計算装置、秘密共役勾配法計算方法、共役勾配法計算方法、およびプログラム | |
| JP7452692B2 (ja) | 秘密指数部統一システム、秘密指数部統一装置、秘密指数部統一方法、秘密和計算システム、秘密積和計算システム、プログラム | |
| CN114003951A (zh) | 信用评分方法、装置以及计算机可读存储介质 | |
| JP7331953B2 (ja) | 秘密逆数計算システム、秘密正規化システム、それらの方法、秘密計算装置、およびプログラム | |
| JP7279796B2 (ja) | 秘密勾配降下法計算方法、秘密深層学習方法、秘密勾配降下法計算システム、秘密深層学習システム、秘密計算装置、およびプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19868468 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2020550513 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2019868468 Country of ref document: EP Effective date: 20210504 |
|
| ENP | Entry into the national phase |
Ref document number: 2019352310 Country of ref document: AU Date of ref document: 20191002 Kind code of ref document: A |
|
| WWG | Wipo information: grant in national office |
Ref document number: 17279595 Country of ref document: US |