WO2020250741A1 - 列車制御システム及びコンピュータプログラム - Google Patents
列車制御システム及びコンピュータプログラム Download PDFInfo
- Publication number
- WO2020250741A1 WO2020250741A1 PCT/JP2020/021670 JP2020021670W WO2020250741A1 WO 2020250741 A1 WO2020250741 A1 WO 2020250741A1 JP 2020021670 W JP2020021670 W JP 2020021670W WO 2020250741 A1 WO2020250741 A1 WO 2020250741A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- obstacle
- information
- train
- obstacle information
- format
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L23/00—Control, warning or like safety means along the route or between vehicles or trains
- B61L23/04—Control, warning or like safety means along the route or between vehicles or trains for monitoring the mechanical state of the route
- B61L23/041—Obstacle detection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L3/00—Electric devices on electrically-propelled vehicles for safety purposes; Monitoring operating variables, e.g. speed, deceleration or energy consumption
- B60L3/0007—Measures or means for preventing or attenuating collisions
- B60L3/0015—Prevention of collisions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2200/00—Type of vehicles
- B60L2200/26—Rail vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Definitions
- the present invention relates to a train control system and a computer program.
- Patent Document 2 includes an in-line obstacle detection device that detects in-line obstacle information, an own train state detection device that detects its own train state, and a line that collects information about the line. It has a following train equipped with an on-board control device that takes in and processes an information collecting device for a railway line and an information collecting device from the preceding train that collects information from the preceding train.
- Patent Document 1 an abnormality on the track is identified from obstacle information detected by another train, and train control is performed. Therefore, when there is a time lag between the time when the obstacle information detected by another train is acquired and the time when the next train actually approaches the obstacle, and the obstacle does not actually hinder the train running. However, there was a possibility that train running would be controlled based on this obstacle information. That is, the reliability or importance of the obstacle information detected by other trains may decrease with the passage of time, and by applying such obstacle information, unnecessary train control may occur.
- Patent Document 2 in order to improve the obstacle detection accuracy, a large number of in-line obstacle detection devices are installed around the line, and the in-line obstacle information detected by these in-line obstacle detection devices is collected. It needs to be processed in the on-board control device. Therefore, the longer the applied track length, the larger the processing procedure in the on-board control device of the following train may be.
- the present invention has been made in view of the above problems, and an object of the present invention is to provide a train control system and a computer program capable of performing appropriate obstacle detection processing while simplifying obstacle detection processing.
- a train control system has a train control device mounted on a train and configured to be able to communicate with an external device outside the train. , At least detect the existence of obstacles around the train and acquire the first obstacle information about the obstacle, manage the first obstacle information in the first format, and acquire it from an external device. , Manages the second obstacle information about obstacles, which is the second format, which has less information than the first format, and converts the second obstacle information, which is the second format, into the first format. , The obstacle is detected based on the converted second obstacle information and the first obstacle information.
- FIG. 1 It is a figure which shows the functional structure of the train control system which concerns on Example 1.
- FIG. It is a figure which shows the functional structure of the main part of the train control apparatus which concerns on Example 1.
- FIG. It is a figure which shows an example of the vehicle management object information in Example 1.
- FIG. It is a figure which shows the functional structure of the main part of the ground apparatus which concerns on Example 1.
- FIG. It is a figure which shows an example of all area object information in Example 1.
- FIG. It is a flowchart which shows an example of the operation of the train control device which concerns on Example 1.
- FIG. It is a flowchart which shows an example of the operation of the ground apparatus which concerns on Example 1.
- FIG. It is a flowchart which shows an example of the obstacle information extraction processing in the train control apparatus which concerns on Example 1.
- Example 1 It is a figure which shows an example of the conversion process and fusion process of simple obstacle information in Example 1. It is a flowchart which shows an example of the obstacle information conversion processing in the ground apparatus which concerns on Example 1. FIG. It is a figure which shows an example of the obstacle information conversion processing in Example 1. FIG. It is a figure which shows the functional structure of the train control system which concerns on Example 2. It is a flowchart which shows an example of the operation of the train control system which concerns on Example 2.
- the train control system of this embodiment has the following configuration as an example.
- the second obstacle information which is the obstacle detection information of all trains, held by the ground device, which is an example of an external device
- operation management information according to the importance in order to suppress the preprocessing time on the train.
- Obstacle coordinate approximation based on for example, from two dimensions to one dimension
- a second simplified second obstacle information by integrating multiple second obstacle information in a certain section for example, block section or station section
- the train control device mounted on each train identifies the obstacle information to be applied from the provided second obstacle information and its own traveling position, and performs necessary train control.
- the second obstacle information is stochastically different from the first obstacle information detected by the sensor which is the detection unit mounted on the train. Convert to a data format that can be integrated and perform fusion processing of obstacle information.
- the sensor fusion generally means performing various detection processes by combining the detection results of a plurality of sensors, preferably a plurality of sensors each outputting a detection result of a unique format, but in the present specification. In addition to this, it is also probabilistically integrating the detection results of multiple sensors. Such an integrated process is hereinafter referred to as a fusion process.
- FIG. 1 is a diagram showing a functional configuration of the train control system according to the first embodiment.
- the train control system 1 of this embodiment includes a train control device 105 mounted on a train 101 traveling on a track 102, a ground device (external device) 103 provided outside the train 101, these train control devices 105, and the train control device 105. It has at least an on-ground on-board interface 104 that is capable of communicating with the ground device 103. Although only one train 101 and one train control device 105 are shown in FIG. 1, there is no limit to the number of trains 101 and 105.
- Both the train control device 105 and the ground device 103 are composed of devices capable of various information processing, for example, information processing devices such as a computer.
- the information processing device has an arithmetic element, a storage medium, and a communication interface, and further has an input device such as a mouse and a keyboard, and a display device such as a display, if necessary.
- the arithmetic element is, for example, a CPU (Central Processing Unit), an FPGA (Field-Programmable Gate Array), or the like.
- the storage medium includes, for example, a magnetic storage medium such as an HDD (Hard Disk Drive), a semiconductor storage medium such as a RAM (Random Access Memory), a ROM (Read Only Memory), and an SSD (Solid State Drive). Further, a combination of an optical disk such as a DVD (Digital Versatile Disk) and an optical disk drive is also used as a storage medium. In addition, a known storage medium such as a magnetic tape medium is also used as the storage medium.
- Programs such as firmware are stored in the storage medium.
- a program such as firmware is read from this storage medium and executed to perform overall control of the train control device 105 or the like.
- the storage medium stores data and the like required for each process of the train control device 105 and the like.
- the train control device 105 includes a sensor unit 111, an obstacle detection unit 112, an on-board obstacle information receiving unit 113, an obstacle information management unit 114, an obstacle information extraction unit 115, an on-vehicle obstacle information integration unit 116, and an on-vehicle obstacle information unit. It has an obstacle information transmission unit 117, a vehicle control device 118, and on-vehicle management object information 119.
- the sensor unit 111 detects obstacles in and around the track 102 located in the traveling direction of the train 101, and outputs the first obstacle information related to the obstacles.
- the obstacle detection unit 112 receives the first obstacle information output by the sensor unit 111, and outputs the obstacle analysis processing result for the first obstacle information.
- the vehicle-mounted obstacle information receiving unit 113 receives the result of converting the second obstacle information managed by the ground device 103 from the first format to the second format via the ground-based vehicle interface 104.
- the obstacle information management unit 114 manages the obstacle analysis processing result output by the obstacle detection unit 112 and the second obstacle information of the second type received by the on-board obstacle information reception unit 113, and the obstacles. Providing information to the obstacle information extraction unit 115
- the obstacle information extraction unit 115 can select the obstacle information to be applied based on the traveling position of the train 101 from the obstacle information received from the obstacle information management unit 114, and can fuse the traveling control command and the obstacle information. Convert to format.
- the on-board obstacle information integration unit 116 performs fusion processing of obstacle information based on the obstacle information selected by the obstacle information extraction unit 115.
- the on-vehicle obstacle information transmission unit 117 transmits the integrated obstacle information output by the fusion process of the on-vehicle obstacle information integration unit 116 to the ground device 103 via the on-ground on-board interface 104.
- the vehicle control device 118 receives the travel control command output by the obstacle information extraction unit 115, and executes the control process of the train 101. Normally, the vehicle control device 118 controls the running of the train 101 by controlling the running speed of the train 101, but the running of the train 101 may be controlled by controlling the acceleration.
- the on-board management object information 119 holds the first obstacle information specified by the train control device 105 itself and the second obstacle information received from the ground device 103. The details of the on-board management object information 119 will be described later.
- the ground device 103 is currently traveling and manages obstacle information of all trains 101 having a train control device 105.
- the ground device 103 has a server obstacle information receiving unit 131, a server obstacle information integrating unit 132, an obstacle information calculating unit 133, a server obstacle information transmitting unit 134, an operation management information 135, and all area object information 136.
- the server obstacle information receiving unit 131 receives the integrated obstacle information output from the train 101 via the ground vehicle interface 104.
- the server obstacle information integration unit 132 performs fusion processing of obstacle information from the train 101 traveling in the area in charge received by the server obstacle information reception unit 131, and outputs the integrated obstacle information output as a result of the processing.
- All area object information 136 is used for management.
- the obstacle information calculation unit 133 uses the data held by the operation management information 135 and the all area object information 136 to obtain the obstacle information required for the destination train 101 from the first format to the second format. Perform the process of converting to.
- the server obstacle information transmission unit 134 transmits the second obstacle information of the second form output by the obstacle information calculation unit 133 to all the vehicles traveling in the area such as the train 101.
- the operation management information 135 holds vehicle operation information such as the train 101 in the area in charge of the ground device 103 itself.
- the all area object information 136 holds the fusion processing result of the obstacle information received from all the trains 101 traveling in the area and the importance definition for the obstacle information. Details of all area object information 136 will be described later.
- the ground vehicle interface 104 is an interface that enables mutual communication of information between the train control device 105 and the ground device 103.
- the ground vehicle interface 104 is a wireless communication that communicates between a ground communication system such as WAN (Wide Area Network) represented by the Internet and a moving train 101 such as a mobile communication system or a train radio system.
- WAN Wide Area Network
- An example is a combination with a system.
- the sensor unit 111 included in the train 101 may be composed of a plurality of sensors (monocular camera, millimeter wave radar, etc.). Further, in this embodiment, it is assumed that the obstacle information of all trains 101 is managed by the ground device 103, but the train control device 105 of a specific train 101 may perform this role, or an obstacle. Information may be provided between the train control devices 105.
- FIG. 2 is a diagram showing a functional configuration of a main part of the train control device 105 according to the first embodiment.
- FIG. 2 shows the present invention using the obstacle information 1191 and the simple obstacle information 1192 held by the on-board management object information 119 in the obstacle information extraction unit 115 in the train 101. It is a block diagram for specifying the obstacle information to be applied to fusion processing, and converting the data format of simple obstacle information.
- the obstacle information extraction unit 115 includes an on-track traveling position specifying unit 1121, an applied obstacle information extracting unit 1122, a traveling switching determination unit 1123, and an obstacle information format conversion unit 1124. Further, the vehicle management object information 119 includes obstacle information 1191 which is the first obstacle information and simple obstacle information 1192 which is the second obstacle information.
- the on-track traveling position specifying unit 1121 specifies the traveling position of the own train 101 from the obstacle information 1191 of the on-board management object information 119, the diamond information of the own train 101 and the traveling information of the own train 101, both of which are illustrated. Further, the on-track traveling position specifying unit 1121 transmits the obstacle information 1191 and the simple obstacle information 1192 held by the on-board management object information 119, and the specified traveling position information to the applied obstacle information extracting unit 1122.
- the applied obstacle information extraction unit 1122 extracts the applicable obstacle information based on the traveling position information received from the traveling position specifying unit 1121 on the track. Then, when the extracted obstacle information includes information that requires traveling control, the applied obstacle information extraction unit 1122 transmits the traveling position information and the corresponding obstacle information to the traveling switching determination unit 1123. Further, the application obstacle information extraction unit 1122 transmits all the extracted obstacle information to the obstacle information format conversion unit 1124.
- the travel switching determination unit 1123 When the travel switching determination unit 1123 receives the travel position information and the obstacle information from the applicable obstacle information extraction unit 1122, the travel switching determination unit 1123 determines the necessity of the travel control of the train 101 from the information, and determines that the travel control is necessary. If so, a travel control command is transmitted to the vehicle control device 118.
- the obstacle information format conversion unit 1124 converts the simple obstacle information 1192 into a data format capable of fusion processing by a probability distribution among all the obstacle information received from the applicable obstacle information extraction unit 1122. After that, all the obstacle information 1191 and the simple obstacle information 1192 converted into a fusion-processable format are transmitted to the on-board obstacle information integration unit 116.
- FIG. 3 is a diagram showing an example of vehicle management object information 119 in the first embodiment.
- the on-board management object information 119 has obstacle information 1191 and simple obstacle information 1192.
- the obstacle information 1191 is obstacle information including the obstacle type, the detection time, and the two-dimensional obstacle position information detected by the sensor unit 111 and the obstacle detection unit 112 of the train 101.
- the simple obstacle information 1192 is information that is received from the ground device 103 and simplifies the second obstacle information detected by another train into one-dimensional (second form) detection position information.
- the vehicle management object information 119 describes an example in which these obstacle information 1191 and 1192 are possessed, but the vehicle information other than the obstacle information 1191 which is two-dimensional obstacle position information is possessed.
- the data to be used may be changed arbitrarily.
- the simple obstacle information 1192 has a flag inside and outside the building limit, and manages whether the obstacle exists inside or outside the building limit with 1-bit information, but this identification is not necessarily 1 It does not have to be bit information and may be managed within a range.
- FIG. 4 is a diagram showing a functional configuration of a main part of the ground device 103 according to the first embodiment.
- the obstacle information calculation unit 133 identifies and identifies the obstacle information to be converted into the simple obstacle information 1192 by using the all area obstacle information 1361 and the importance information 1362 held by the all area object information 136. Converts the obstacle information to a one-dimensional data format.
- the obstacle information calculation unit 133 has an obstacle information conversion necessity determination unit 1331, a route information identification unit 1332, and a one-dimensional information conversion unit 1333.
- the obstacle information conversion necessity determination unit 1331 refers to the all area obstacle information 1361 held by the all area object information 136 after the all area object information 136 is updated to the latest state by the server obstacle information integration unit 132. , The importance of all obstacle information is calculated based on the importance information 1362, and the obstacle information having the importance of a certain threshold value or less set is specified. Further, the obstacle information conversion necessity determination unit 1331 transmits all the obstacle information to the one-dimensional information conversion unit 1333.
- the route information identification unit 1332 identifies the travel area of all trains 101 based on the operation management information 135 that holds the operation management information of all trains 101 traveling in the management area of the ground device 103, and provides the specified travel area information. It is transmitted to the one-dimensional information conversion unit 1333.
- the one-dimensional information conversion unit 1333 should transmit to all trains 101 based on the obstacle information received from the obstacle information conversion necessity determination unit 1331 and the traveling area information of all trains 101 received from the route information identification unit 1332. After identifying the object information and converting it into one-dimensional information with importance below a certain threshold value specified by the obstacle information conversion necessity determination unit 1331, all the specified obstacle information to be transmitted is transmitted. It is transmitted to the server obstacle information transmission unit 134.
- FIG. 5 is a data structure of all area object information 136.
- the all area object information 136 has the all area obstacle information 1361 and the importance information 1362.
- All area obstacle information 1361 is information in which area information is added to integrated obstacle information that integrates obstacle information received from vehicles traveling in all areas such as train 101.
- the importance information 1362 is the importance definition information for the object type, the point, the detection count, and the elapsed time for use in the obstacle information conversion necessity determination unit 1331 of the obstacle information calculation unit 133. ..
- the importance information 1362 includes the object type, the point, the detection count, and the elapsed time.
- the information included in the importance information 1362 for example, the magnitude of the velocity vector (it is reliable if the vector is large).
- Other indicators may be adopted in addition to those shown in FIG. 5, such as (decreased importance).
- the importance information 1362 is static data for all areas, the importance information may be changed for each area or may be dynamically reset.
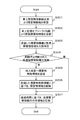
- FIG. 6 is a flowchart showing an example of the operation of the train control device 105 according to the first embodiment.
- the flowchart shown in FIG. 6 shows an overall processing procedure for obstacle detection in the train control device 105.
- the sensor unit 111 installed on the train 101 performs obstacle detection processing and transmits the detected obstacle information to the obstacle detection unit 112 (S101).
- the obstacle detection unit 112 that has received the obstacle information performs obstacle determination for all the obstacle information, and transmits the obstacle information that has been determined to be an obstacle to the obstacle information management unit 114 (S102).
- the obstacle information management unit 114 acquires the simple obstacle information transmitted from the ground device 103 (S103), and the vehicle management object information 119 holds the acquired obstacle information and the simple obstacle information 1191. And record in the simple obstacle information 1192 (S104). Next, the obstacle information management unit 114 acquires the obstacle information 1191 and the simple obstacle information 1192 from the on-board management object information 119, and transmits the obstacle information information management unit 114 to the obstacle information extraction unit 115 (S105).
- the obstacle information extraction unit 115 that has received the obstacle information 1191 and the simple obstacle information 1192 extracts the obstacle information to be fused (S106) based on the traveling position of the own train 101, and the extracted obstacles. In the information, it is determined whether or not there is obstacle information for which traveling control needs to be performed (S107).
- the obstacle information extraction unit 115 issues a travel control command to the vehicle control device 118, and the vehicle control device 118 controls the vehicle. The process is carried out (S108).
- the obstacle information extraction unit 115 extracts the obstacle to the on-board obstacle information integration unit 116. Send physical information.
- the on-board obstacle information integration unit 116 performs fusion processing on the obstacle information, creates integrated obstacle information (S109), and uses the created integrated obstacle information. It is transmitted to the ground device (S110).
- the process shown in the flowchart of FIG. 6 is repeatedly performed at regular intervals while the train 101 is running.
- FIG. 7 is a flowchart showing an example of the operation of the ground device 103 according to the first embodiment.
- the flowchart shown in FIG. 7 shows an overall processing procedure for obstacle information management of the ground device 103.
- the server obstacle information receiving unit 131 receives obstacle information from all trains 101 traveling in the management area and transmits it to the server obstacle information integration unit 132 (S201).
- the server obstacle information integration unit 132 that has received the obstacle information from all trains 101 performs fusion processing on the obstacle information to create integrated obstacle information (S202), and uses the created integrated obstacle information. It records in all area obstacle information 1361 held by all area object information 136, and notifies the obstacle information calculation unit 133 that all area obstacle information 1361 has been updated (S203).
- the obstacle information calculation unit 133 Upon receiving the update notification, the obstacle information calculation unit 133 transmits the obstacle information to be transmitted from the all area obstacle information 1361 to all the trains 101 based on the importance information 1362 and the operation management information 135 held by the all area object information 136. It is extracted and the obstacle information is converted into one-dimensional information (S204).
- the server obstacle information transmission unit 134 receives the obstacle information converted into one-dimensional information, and transmits the obstacle information converted into one-dimensional information to all trains 101 traveling in the management area (S205).
- the process shown in the flowchart of FIG. 7 is repeatedly performed at regular intervals while the ground device 103 is in operation.
- FIG. 8 is a flowchart showing an example of obstacle information extraction processing in the train control device 105 according to the first embodiment.
- the flowchart shown in FIG. 8 shows a detailed application obstacle extraction procedure by the obstacle information extraction unit 115, which is the process of S106 in the flowchart of FIG.
- the on-track running position specifying unit 1121 identifies the running position of the own train 101 based on the obstacle information 1191 held by the on-board management object information 119 and its own running record information held by the train 101. The process is carried out (S1061). Then, the traveling position specifying unit 1121 on the track sends the specified traveling position information to the application obstacle information extraction unit 1122.
- the applied obstacle information extraction unit 1122 that has received the traveling position information refers to the obstacle information 1191 and the simple obstacle information 1192 stored in the on-board management object information 119 based on the received traveling position of the own train 101. , Perform a determination process to determine the obstacle information to be applied (S1062).
- the application obstacle information extraction unit 1122 confirms whether or not there is obstacle information and simple obstacle information for which the determination process in S1062 should be performed (S1063), and there is obstacle information for which the determination process should be performed. In the case (yes in S1063), the process of S1062 is repeatedly executed until there is no obstacle information to be executed (no in S1063).
- the applied obstacle information extraction unit 1122 extracts all the obstacle information and the simple obstacle information for which the judgment processing is determined (S1064). Then, the application obstacle information extraction unit 1122 confirms whether or not the extracted obstacle information includes highly reliable obstacle information to be dealt with urgently (S1065).
- the applicable obstacle information extraction unit 1122 transmits the obstacle information to be urgently dealt with to the travel switching determination unit 1123, and the travel switching determination unit 1123 The travel control is determined based on the received obstacle information, and the travel control command is transmitted to the vehicle control device 118 (S1066).
- the applied obstacle information extraction unit 1122 converts the extracted obstacle information and simple obstacle information into the obstacle information format. It is transmitted to the unit 1124.
- the obstacle information format conversion unit 1124 that has received the obstacle information and the simple obstacle information identifies all the simple obstacle information (S1067).
- the obstacle information format conversion unit 1124 applies the information calculated from the probability distribution to the specified simple obstacle information as complementary information of the simple obstacle information, and is a two-dimensional information that can be fused with the obstacle information. Convert to a data format with (S1068).
- the obstacle information format conversion unit 1124 confirms whether or not there is simple obstacle information to be converted (S1069), and if there is simple obstacle information to be converted (Yes in S1069).
- the obstacle information format conversion unit 1124 repeatedly executes S1068 until there is no obstacle information to be converted.
- the obstacle information format conversion unit 1124 transmits all the two-dimensionally converted obstacle information to the on-board obstacle information integration unit 116 (no obstacle information). S10610).
- FIG. 9 is a diagram showing an example of a simple obstacle information conversion process and a fusion process in the first embodiment. More specifically, FIG. 9 is an example of two-dimensional conversion processing and fusion processing results of simple obstacle information using a probability distribution, which are carried out by the obstacle information format conversion unit 1124 and the on-board obstacle information integration unit 116. is there.
- the probability distribution is applied to the simple obstacle information received from the ground device 103, so that the train 101 is out of the detection range of the own train 101.
- the range in which the obstacle exists from the one-dimensional information of the obstacle existing in it can be converted into the two-dimensional approximate obstacle information.
- This conversion sets a reliability threshold value in order to deal with obstacle information whose reliability decreases with the passage of time, is performed every cycle of obstacle detection processing, and increases the variance during conversion as time passes. To go. As a result, unreliable information can be excluded from the fusion process.
- the method of giving the probability distribution may be well known here, but as an example, it is preferable to give the probability distribution using the Kalman filter.
- FIG. 10 is a flowchart showing an example of the obstacle information conversion process in the ground device 103 according to the first embodiment.
- the flowchart shown in FIG. 10 shows a detailed application obstacle extraction procedure by the obstacle information calculation unit 133, which is the process of S204 in the flowchart of FIG. 7.
- the obstacle information conversion necessity determination unit 1331 receives the update notification of all area object information 136 from the server obstacle information integration unit 132, the all area obstacle information 1361 and important are held by all area object information 136.
- the degree information 1362 is acquired (S2081).
- the obstacle information conversion necessity determination unit 1331 calculates the importance of all the obstacle information in the acquired all area obstacle information 1361 and the importance information 1362, and based on the set constant importance threshold value. It is determined whether or not obstacle information conversion is necessary (S2082).
- the obstacle information conversion necessity determination unit 1331 confirms whether or not there is obstacle information in which the importance of each calculated obstacle information exceeds the importance threshold (S2083), and the obstacle exceeding the importance threshold.
- the obstacle information conversion necessity determination unit 1331 transmits all the obstacle information exceeding the importance threshold value to the one-dimensional information conversion unit 1333.
- the present extraction process is terminated.
- the one-dimensional information conversion unit 1333 Upon receiving the obstacle information, the one-dimensional information conversion unit 1333 requests the route information identification unit 1332 to specify the traveling position of all vehicles traveling in the management area, and the route information identification unit 1332 that receives the request manages the operation.
- the operation information of each train 101 is acquired from the information 135 (S2084), the traveling position information of each train 101 is specified from the acquired operation information, and the traveling position information is transmitted to the one-dimensional information conversion unit 1333 (S2085).
- the one-dimensional information conversion unit 1333 confirms whether or not there is obstacle information to be provided to the train 101 based on the positional relationship between the obstacle information received by S2083 and S2085 and the traveling position information of each train 101 (S2086). ). If there is no obstacle information to be provided to the vehicle (none in S2086), this extraction process ends.
- the one-dimensional information conversion unit 1333 converts the obstacle information having the corresponding two-dimensional information into simple obstacle information having only the one-dimensional information. (S2087).
- the one-dimensional information conversion unit 1333 confirms whether or not there is obstacle information that should be converted into one-dimensional information (S2088), and if there is obstacle information that should be converted (S2088). In), the one-dimensional information conversion unit 1333 repeatedly executes S2087 until there is no obstacle information to be converted. Then, when there is no obstacle information to be converted (none in S2088), the one-dimensional information conversion unit 1333 transfers all the simple obstacle information converted into the one-dimensional information to the server obstacle information transmission unit 134. Transmit (S1064).
- FIG. 11 is a diagram showing an example of the obstacle information conversion process in the first embodiment. More specifically, FIG. 11 is an example of the one-dimensional conversion process of the two-dimensional obstacle information performed by the one-dimensional information conversion unit 1333.
- the position information of the three obstacles determined to be obstacles is (x 1 , y 1 ), (x 2 , y, respectively). 2 ), (x 3 , y 3 ).
- the Y axis is set in the direction in which the track 102 extends, that is, the axis along the traveling direction of the train 101, and the front in the traveling direction of the train 101 is the positive direction.
- the X-axis is set in the direction orthogonal to the track 102, and the right direction of the train 101 is the positive direction.
- Obstacle information related to the three obstacles is transmitted from the train 101 to the ground device 103, and is stored in the all area obstacle information 1361 held by the all area object information 136.
- the one-dimensional information conversion unit 1333 converts this information into one-dimensional information, the information about each Y coordinate is deleted, and instead, a 1-bit flag indicating inside or outside the building limit is added, and the information is lightened. Obstacle information is created.
- a 1-bit flag indicating the inside and outside of the building limit is given, but it is not always necessary to give it. It is also possible to add information other than the 1-bit flag indicating the inside and outside of the building limit.
- the train control device 105 detects at least the presence of obstacles existing around the train, acquires the first obstacle information regarding the obstacles, and obtains the first obstacle information.
- Obstacle information is managed in the first form, the two-dimensional form, and the second obstacle in the one-dimensional form, which is the second form with less information than the first form, acquired from the ground device 103. It manages information (simple obstacle information), converts the second obstacle information into a two-dimensional format, and detects obstacles based on the converted second obstacle information and the first obstacle information. There is.
- the obstacle information is calculated when the ground device 103 provides the second obstacle information detected by all the trains 101, which is held by the all area object information 136, to each train 101.
- the section 133 converts the second obstacle information into the second format which is one-dimensional information, and each train 101 provides the necessary information. As a result, it is possible to reduce the time required for each train 101 to identify the information required for the own train 101 with respect to the second obstacle information detected by the other train 101.
- the obstacle information calculation unit 133 of the ground device 103 sets the importance definition for the second obstacle information, and provides only the second obstacle information with high importance to each train 101, so that the train The amount of information provided to 101 can be reduced and the detection accuracy can be improved. This can be expected to improve train safety.
- the obstacle information extraction unit 115 holds simple obstacle information (second obstacle information) held by the on-board management object information 119. ) 1192 is converted into approximate two-dimensional obstacle information that can be fused using a probability distribution, and fusion processing is performed including the converted obstacle information to remove noise and errors in the obstacle information. Obstacle detection accuracy can be improved.
- the second embodiment it is determined whether or not the obstacle information needs to be updated (particularly deleted) based on the integrated obstacle information output by the train 101 by performing the fusion process, and the obstacle information that needs to be updated is determined.
- the update information is transmitted to the ground device 103.
- the ground device 103 that has received the update information updates (deletes) the obstacle information of all the areas that it owns based on the received update information.
- the same number will be assigned to the same configuration as that of the first embodiment, and the description thereof will be omitted.
- FIG. 12 is a diagram showing a functional configuration of the train control system 1 according to the second embodiment.
- the train control device 105 of this embodiment has an obstacle information update determination unit 220 and an obstacle update information transmission unit 221 in addition to the configuration of the first embodiment described above.
- the obstacle information update determination unit 220 receives the obstacle information output by the on-board obstacle information integration unit 116, and based on each obstacle information, all the area object information 136 held by the ground device 103 Determines whether or not the area obstacle information has been updated.
- the obstacle update information transmission unit 221 transmits the update information for each obstacle information received from the obstacle information update determination unit 220 to the ground device 103.
- the ground device 103 of this embodiment has an obstacle update information receiving unit 231 and a server obstacle information integration / updating unit 232.
- the obstacle update information receiving unit 231 receives the update information for all area obstacle information received from the train 101, and transmits the update information to the server obstacle information integration / update unit 232.
- the server obstacle information integration / update unit 232 executes a process of updating all area obstacle information 1361 held by all area object information 136 based on the received update information for all area obstacle information.
- FIG. 13 is a flowchart showing an example of the operation of the train control system 1 according to the second embodiment.
- the flowchart shown in FIG. 13 shows a procedure for updating all area obstacle information carried out by the train control device 105 and the ground device 103 in the second embodiment.
- the obstacle information update determination unit 220 receives the obstacle information from the vehicle obstacle information integration unit 116 (S301), and the simple obstacle received from the ground device 103 held by the vehicle management object information 119. Acquire object information (S302).
- the obstacle information update determination unit 220 that has received the obstacle information and the simple obstacle information compares the obstacle information with the simple obstacle information, and the train 101 determines the obstacle related to the simple obstacle information based on the obstacle information. If it can be determined that the information can be identified, the corresponding simple obstacle information is determined to be deleteable information, and the obstacle deletion information is created (S303).
- the obstacle information update determination unit 220 confirms whether or not there is simple obstacle information determined to be deleteable (S304), and when there is simple obstacle information determined to be deleteable (in S303). Yes), the obstacle update information transmission unit 221 transmits the obstacle deletion information created in S303 to the ground device 103 (S305).
- the server obstacle information integration / update unit 232 that received the obstacle deletion information via the obstacle update information receiving unit 231 has all area obstacle information held by all area object information 136 based on the obstacle deletion information.
- the obstacle information is deleted from 1361 (S306), and the distribution information of all area obstacle information 1361 is updated based on the elapsed time.
- the train control system 1 of the present embodiment can also obtain the same effect as the train control system 1 of the above-described first embodiment.
- the train control device 105 of the own train 101 determines that the simple obstacle information received from the ground device 103 does not affect the running.
- the running is continued and the obstacle information is updated at the same time (
- the reliability of the obstacle information applied to the fusion process can be improved. Obstacle detection accuracy can be improved.
- the present invention is not limited to the above-mentioned examples, and includes various modifications.
- the above-described embodiment has been described in detail in order to explain the present invention in an easy-to-understand manner, and is not necessarily limited to those having all the described configurations.
- it is possible to replace a part of the configuration of one embodiment with the configuration of another embodiment and it is also possible to add the configuration of another embodiment to the configuration of one embodiment.
- each of the above configurations, functions, processing units, processing means, etc. may be realized by hardware by designing a part or all of them by, for example, an integrated circuit. Further, each of the above configurations, functions, and the like may be realized by software by the processor interpreting and executing a program that realizes each function. Information such as programs, tables, and files that realize each function can be placed in a memory, a recording device such as a hard disk or SSD, or a recording medium such as an IC card, SD card, or DVD.
- control lines and information lines indicate what is considered necessary for explanation, and not all control lines and information lines are necessarily shown on the product. In practice, it can be considered that almost all configurations are interconnected.
- Obstacle update information reception unit 232 Server failure Object information integration / update unit 1121 ... Tracking position identification unit 1122 ... Applicable obstacle information extraction unit 1123 ... Travel switching judgment unit 1124 ... Obstacle information format conversion unit 1191 ... Obstacle information (first obstacle information) 1192 ... Simple obstacle information (second obstacle information) 1331 ... Obstacle information conversion necessity judgment unit 1332 ... Route information identification unit 1333 ... One-dimensional information conversion unit 1361 ... All area obstacle information 1362 ... Importance information
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Train Traffic Observation, Control, And Security (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
障害物検知処理を簡略化しつつ適切な障害物検知処理を行うことを可能にする。 列車制御システム1は、列車101に搭載され、列車の外部にある地上装置103と通信可能に構成された列車制御装置105を有し、列車制御装置105は、少なくとも列車101の周辺に存在する障害物の存在を検知して障害物に関する第一の障害物情報を取得し、第一の障害物情報を第一の形式で管理するとともに、地上装置103から取得した、第一の形式よりも情報量が少ない第二の形式である障害物に関する第二の障害物情報を管理し、第二の形式である第二の障害物情報を第一の形式に変換し、変換した第二の障害物情報と第一の障害物情報とに基づいて障害物を検知する。
Description
本発明は、列車制御システム及びコンピュータプログラムに関する。
線路上を走行する列車を制御する列車制御システムにおいて、複数の列車に搭載した複数のセンサ装置から得られた検知結果を統合して障害物検知を行うことで、自列車の検知可能外である領域における障害物情報を取得することができる。これにより、事故回避の余裕を生むことができる。このような技術の一例として、特許文献1及び特許文献2に開示された技術がある。
特許文献1に開示された技術では、軌道上を走行する列車が他の軌道上の安全監視を実施し、列車が他の軌道上に障害物を検知した場合に障害物に関する異常情報を指令センターに送信し、指令センターは、送信された異常情報に基づき、他の軌道のうち障害物が存在する危険区間を次に通過する列車を危険列車として特定し、この危険列車に警報を送信している。
また、特許文献2に開示された技術は、線路内障害物情報を検知する線路内障害物検出装置と、自らの列車状態を検知する自列車状態検知装置と、線路沿線に関する情報を収集する線路沿線に関する情報収集装置と、先行列車からの情報を収集する先行列車からの情報収集装置とを取り込み処理する車上制御装置を搭載する後続列車とを有する。
上述した特許文献1では、他列車が検出した障害物情報により軌道上の異常を特定し、列車制御を実施している。そのため、他列車が検出した障害物情報を取得した時間と実際に次列車がその障害物に接近する時間との間にタイムラグが生じ、実際にはその障害物が列車の走行に支障がない場合でもこの障害物情報に基づいて列車走行の制御を行ってしまう可能性があった。つまり、他列車が検出した障害物情報は時間経過とともに信頼度または重要度が低下する可能性があり、かかる障害物情報を適用することで、不要な列車制御が発生する可能性があった。
また、特許文献2では、障害物の検知精度を向上させるためには、多数の線路内障害物検出装置を線路周辺に設置し、これら線路内障害物検出装置が検知した線路内障害物情報を車上制御装置において処理する必要がある。そのため、適用される線路長が長ければ長いほど、後続列車の車上制御装置における処理手順が膨大になる可能性があった。
本発明は上記の課題に鑑みてなされたもので、障害物検知処理を簡略化しつつ適切な障害物検知処理を行うことが可能な列車制御システム及びコンピュータプログラムを提供することにある。
上記課題を解決すべく、本発明の一つの観点に従う列車制御システムは、列車に搭載され、列車の外部にある外部装置と通信可能に構成された列車制御装置を有し、この列車制御装置は、少なくとも列車の周辺に存在する障害物の存在を検知して障害物に関する第一の障害物情報を取得し、第一の障害物情報を第一の形式で管理するとともに、外部装置から取得した、第一の形式よりも情報量が少ない第二の形式である障害物に関する第二の障害物情報を管理し、第二の形式である第二の障害物情報を第一の形式に変換し、変換した第二の障害物情報と第一の障害物情報とに基づいて障害物を検知する。
本発明によれば、障害物検知処理を簡略化しつつ適切な障害物検知処理を行うことが可能な列車制御システム及びコンピュータプログラムを実現することができる。
以下、本発明の実施形態について、図面を参照して説明する。なお、以下に説明する実施形態は特許請求の範囲に係る発明を限定するものではなく、また実施形態の中で説明されている諸要素及びその組み合わせの全てが発明の解決手段に必須であるとは限らない。
本実施例の列車制御システムは、一例として次のような構成を有する。外部装置の一例である地上装置が保有する、全列車の障害物検知情報である第二の障害物情報について、列車上での前処理時間を抑制するために、重要度に応じて運行管理情報に基づく障害物座標近似(たとえば二次元から一次元に)化し、かつ一定区間(例えば、閉塞区間や駅区間)にある複数の第二の障害物情報を統合して、簡易化した第二の障害物情報を各列車に提供する。各列車に搭載された列車制御装置は、提供された第二の障害物情報と自身の走行位置から適用すべき障害物情報を特定し、必要な列車制御を行う。また、第二の障害物情報のノイズ・誤差を除去するために、この第二の障害物情報を、列車に搭載された検知部であるセンサが検知した第一の障害物情報と確率的に統合できるデータ形式に変換して、障害物情報のフュージョン処理を実施する。
ここに、センサフュージョンとは、一般的には複数のセンサ、好ましくはそれぞれ独自形式の検知結果を出力する複数のセンサの検知結果を組み合わせて各種検知処理を行うことであるが、本明細書では、これに加えて、複数のセンサの検知結果を確率的に統合することでもある。このような統合処理を、以下、フュージョン処理と呼ぶ。
なお、本明細書において「情報」と「データ」とは同義であるとし、特に区別せずに用いる。また、「情報」「データ」と記されている場合、その個数についての限定はない。さらに、その形式に限定はない。加えて言えば、いわゆるテーブル形式で記憶媒体に保管、格納されているデータ等もここにいう「情報」「データ」である。
図1は、実施例1に係る列車制御システムの機能構成を示す図である。
本実施例の列車制御システム1は、軌道102を走行する列車101に搭載された列車制御装置105と、列車101の外部に設けられた地上装置(外部装置)103と、これら列車制御装置105及び地上装置103とを相互に通信可能に構成する地上車上インターフェース104とを少なくとも有する。なお、図1では列車101及び列車制御装置105はそれぞれ1台のみ図示しているが、その台数に制限はない。
これら列車制御装置105及び地上装置103は、いずれも各種情報処理が可能な装置、一例としてコンピュータ等の情報処理装置から構成される。情報処理装置は、演算素子、記憶媒体及び通信インターフェースを有し、さらに、必要に応じてマウス、キーボード等の入力装置、ディスプレイ等の表示装置を有する。
演算素子は、例えばCPU(Central Processing Unit)、FPGA(Field-Programmable Gate Array)等である。記憶媒体は、例えばHDD(Hard Disk Drive)などの磁気記憶媒体、RAM(Random Access Memory)、ROM(Read Only Memory)、SSD(Solid State Drive)などの半導体記憶媒体等を有する。また、DVD(Digital Versatile Disk)等の光ディスク及び光ディスクドライブの組み合わせも記憶媒体として用いられる。その他、磁気テープメディアなどの公知の記憶媒体も記憶媒体として用いられる。
記憶媒体には、ファームウェアなどのプログラムが格納されている。列車制御装置105等の動作開始時(例えば電源投入時)にファームウェア等のプログラムをこの記憶媒体から読み出して実行し、列車制御装置105等の全体制御を行う。また、記憶媒体には、プログラム以外にも、列車制御装置105等の各処理に必要なデータ等が格納されている。
列車制御装置105は、センサ部111、障害物検知部112、車上障害物情報受信部113、障害物情報管理部114、障害物情報抽出部115、車上障害物情報統合部116、車上障害物情報送信部117、車両制御装置118、及び車上管理オブジェクト情報119を有する。
センサ部111は、列車101の進行方向に位置する軌道102及びその周辺における障害物検知を実施し、この障害物に関する第一の障害物情報を出力する。障害物検知部112は、センサ部111が出力した第一の障害物情報を受信し、この第一の障害物情報に対して障害物解析処理結果を出力する。
車上障害物情報受信部113は、地上装置103が管理する第二の障害物情報を第一の形式から第二の形式に変換した結果を地上車上インターフェース104を経由して受信する。障害物情報管理部114は、障害物検知部112が出力する障害物解析処理結果及び車上障害物情報受信部113が受信した第二の形式の第二の障害物情報を管理し、障害物情報を障害物情報抽出部115に提供する
障害物情報抽出部115は、障害物情報管理部114から受信した障害物情報から、列車101の走行位置に基づいて適用する障害物情報を選定し、走行制御命令及び障害物情報をフュージョン可能な形式に変換する。車上障害物情報統合部116は、障害物情報抽出部115で選定された障害物情報に基づいて、障害物情報のフュージョン処理を実施する。車上障害物情報送信部117は、車上障害物情報統合部116のフュージョン処理によって出力された統合障害物情報を地上車上インターフェース104を経由して地上装置103に送信する。
車両制御装置118は、障害物情報抽出部115により出力される走行制御命令を受信し、列車101の制御処理を実施する。通常、車両制御装置118は列車101の走行速度を制御することで列車101の走行を制御するが、加速度を制御することで列車101の走行を制御してもよい。
車上管理オブジェクト情報119は、列車制御装置105自らが特定した第一の障害物情報と、地上装置103から受信した第二の障害物情報とを保持する。車上管理オブジェクト情報119の詳細については後述する。
地上装置103は、現在走行中であり、列車制御装置105を有する全ての列車101の障害物情報を管理する。地上装置103は、サーバ障害物情報受信部131、サーバ障害物情報統合部132、障害物情報算出部133、サーバ障害物情報送信部134、運行管理情報135及び全エリアオブジェクト情報136を有する。
サーバ障害物情報受信部131は、列車101から出力される統合障害物情報を、地上車上インターフェース104を経由して受信する。サーバ障害物情報統合部132は、サーバ障害物情報受信部131が受信した、担当エリアを走行する列車101からの障害物情報のフュージョン処理を実施し、処理の結果出力された統合障害物情報を、全エリアオブジェクト情報136を使用して管理する。
障害物情報算出部133は、運行管理情報135及び全エリアオブジェクト情報136が保持するデータを使用して、送信先の列車101に必要とされる障害物情報を第一の形式から第二の形式に変換する処理を実施する。サーバ障害物情報送信部134は、障害物情報算出部133が出力した第二の形式の第二の障害物情報を、列車101などのエリアを走行するすべての車両に送信する。
運行管理情報135は、地上装置103自身が担当するエリアの列車101などの車両運行情報を保持する。全エリアオブジェクト情報136は、エリアを走行する全ての列車101から受信した障害物情報のフュージョン処理結果及び障害物情報に対する重要度定義を保持する。全エリアオブジェクト情報136の詳細については後述する。
地上車上インターフェース104は、列車制御装置105と地上装置103との間で相互に情報の通信を可能とするインターフェースである。地上車上インターフェース104には、インターネットに代表されるWAN(Wide Area Network)などの地上通信システムと、移動体通信システム、列車無線システムなどの移動中の列車101との間の通信を行う無線通信システムとの組み合わせが例として挙げられる。
ここで、列車101が備えるセンサ部111は複数のセンサ(単眼カメラ、ミリ波レーダなど)から構成されていてもよい。また、本実施例では全列車101の障害物情報は地上装置103が管理することを想定しているが、特定の列車101の列車制御装置105がこの役割を実施してもよいし、障害物情報の提供を列車制御装置105間で実施してもよい。
図2は、実施例1に係る列車制御装置105の要部の機能構成を示す図である。
より詳細には、図2は、列車101内の障害物情報抽出部115における、車上管理オブジェクト情報119が保持している障害物情報1191及び簡易障害物情報1192を使用して、本発明のフュージョン処理に適用する障害物情報を特定し、簡易障害物情報のデータ形式を変換するための構成図である。
障害物情報抽出部115は、軌道上走行位置特定部1121、適用障害物情報抽出部1122、走行切替判定部1123、及び障害物情報形式変換部1124を有する。また、車上管理オブジェクト情報119は、第一の障害物情報である障害物情報1191、及び第二の障害物情報である簡易障害物情報1192を有する。
軌道上走行位置特定部1121は、車上管理オブジェクト情報119の障害物情報1191、いずれも図略の自列車101のダイヤ情報及び自列車101の走行情報から自列車101の走行位置を特定する。また、軌道上走行位置特定部1121は、車上管理オブジェクト情報119が保持する障害物情報1191及び簡易障害物情報1192、及び特定した走行位置情報を適用障害物情報抽出部1122に送信する。
適用障害物情報抽出部1122は、軌道上走行位置特定部1121から受信した走行位置情報に基づき、適用する障害物情報を抽出する。そして、適用障害物情報抽出部1122は、抽出した障害物情報の中に走行制御が必要となる情報が存在する場合、走行切替判定部1123に走行位置情報及び該当する障害物情報を送信する。また、適用障害物情報抽出部1122は、抽出したすべての障害物情報を障害物情報形式変換部1124に送信する。
走行切替判定部1123は、適用障害物情報抽出部1122から走行位置情報及び障害物情報を受信した際に、それらの情報から列車101の走行制御の要否を判定し、走行制御が必要と判定された場合、走行制御命令を車両制御装置118に送信する。
障害物情報形式変換部1124は、適用障害物情報抽出部1122から受信したすべての障害物情報のうち、簡易障害物情報1192に対して確率分布によるフュージョン処理が可能となるデータ形式に変換する。その後、すべての障害物情報1191及びフュージョン処理可能な形式に変換した簡易障害物情報1192を車上障害物情報統合部116に送信する。
図3は、実施例1における車上管理オブジェクト情報119の一例を示す図である。
図2及び図3に示すように、車上管理オブジェクト情報119は、障害物情報1191及び簡易障害物情報1192を有する。
障害物情報1191は、列車101のセンサ部111及び障害物検知部112によって検出された障害物種別、検知時刻、二次元の障害物位置情報からなる障害物情報である。簡易障害物情報1192は、地上装置103から受信する、他列車が検知した第二の障害物情報を一次元(第二の形式)の検知位置情報に簡易化した情報である。
なお、本実施例では、車上管理オブジェクト情報119はこれらの障害物情報1191、1192を保有する例を記載しているが、二次元の障害物位置情報である障害物情報1191以外は、保有するデータを任意に変更してもよい。また、簡易障害物情報1192は建築限界内外フラグを保有しており、障害物が建築限界の中に存在するか外に存在するかを1ビット情報で管理しているが、この識別は必ずしも1ビット情報である必要はなく、範囲で管理してもよい。
図4は、実施例1に係る地上装置103の要部の機能構成を示す図である。
障害物情報算出部133は、全エリアオブジェクト情報136が保持している全エリア障害物情報1361及び重要度情報1362を使用して、簡易障害物情報1192に変換する障害物情報を特定し、特定した障害物情報を一次元のデータ形式に変換する。
障害物情報算出部133は、障害物情報変換要否判定部1331、路線情報特定部1332及び一次元情報変換部1333を有する。
障害物情報変換要否判定部1331は、サーバ障害物情報統合部132によって全エリアオブジェクト情報136が最新状態に更新された後、全エリアオブジェクト情報136が保有する全エリア障害物情報1361に対して、重要度情報1362に基づいて全障害物情報の重要度を算出し、設定されたある一定の閾値以下の重要度を持つ障害物情報を特定する。また、障害物情報変換要否判定部1331は、すべての障害物情報を一次元情報変換部1333に送信する。
路線情報特定部1332は、地上装置103が有する管理エリアを走行する全列車101の運行管理情報を保有する運行管理情報135に基づき、全列車101の走行エリアを特定し、特定した走行エリア情報を一次元情報変換部1333に送信する。
一次元情報変換部1333は、障害物情報変換要否判定部1331から受信した障害物情報と路線情報特定部1332から受信した全列車101の走行エリア情報に基づき、全列車101に送信すべき障害物情報を特定し、また障害物情報変換要否判定部1331で特定された、一定の閾値以下の重要度を持つ一次元情報に変換した後、特定された送信すべきすべての障害物情報をサーバ障害物情報送信部134に送信する。
図5は、全エリアオブジェクト情報136が有するデータの構造である。
図4及び図5に示すように、全エリアオブジェクト情報136は、全エリア障害物情報1361及び重要度情報1362を有する。
全エリア障害物情報1361は、列車101などの全エリアを走行する車両から受信した障害物情報を統合した統合障害物情報にエリア情報を付与した情報である。
重要度情報1362は、障害物情報算出部133が有する障害物情報変換要否判定部1331における変換要否判定に用いるための、オブジェクト種別、地点、検知カウント、経過時間に対する重要度定義情報である。
なお、本実施例では、重要度情報1362としてオブジェクト種別、地点、検知カウント、経過時間を含むものとしているが、重要度情報1362に含まれる情報として、例えば速度ベクトルの大小(ベクトルが大きいと信頼性(重要度)が低下)など、図5に示すものに加えて他の指標を採用してもよい。また、重要度情報1362は全エリアに対する静的なデータとしているが、エリア毎に重要度情報を変更してもよいし、動的に再設定してもよい。
図6は、実施例1に係る列車制御装置105の動作の一例を示すフローチャートである。図6に示すフローチャートは、列車制御装置105における障害物検知のための全体処理手順を示す。
まず、列車101に設置されたセンサ部111は障害物検知処理を実施し、検出された障害物情報を障害物検知部112へ送信する(S101)。障害物情報を受信した障害物検知部112は、すべての障害物情報に対して障害物判定を実施し、障害物判定された障害物情報を障害物情報管理部114へ送信する(S102)。
障害物情報管理部114は、地上装置103から送信される簡易障害物情報を取得し(S103)、取得した障害物情報及び簡易障害物情報を車上管理オブジェクト情報119が保持する障害物情報1191及び簡易障害物情報1192へ記録する(S104)。次いで、障害物情報管理部114は、車上管理オブジェクト情報119から障害物情報1191及び簡易障害物情報1192を取得し、障害物情報抽出部115に送信する(S105)。
障害物情報1191及び簡易障害物情報1192を受信した障害物情報抽出部115は、自列車101の走行位置に基づいて、フュージョン処理対象の障害物情報を抽出し(S106)、抽出された障害物情報において、走行制御を実施する必要がある障害物情報があるか否かを判定する(S107)。
走行制御を実施する必要がある障害物情報が存在すると判定した場合(S107において有)、障害物情報抽出部115は、車両制御装置118へ走行制御命令を発行し、車両制御装置118は車両制御処理を実施する(S108)。
走行制御が必要な障害物情報が存在しないと判定した場合、または車両制御装置118へ走行制御命令を発行した後、障害物情報抽出部115は車上障害物情報統合部116へ抽出された障害物情報を送信する。抽出された障害物情報を受信した車上障害物情報統合部116は、障害物情報に対してフュージョン処理を実施し、統合障害物情報を作成し(S109)、作成された統合障害物情報を地上装置へ送信する(S110)。
図6のフローチャートに示す処理は、列車101が走行中には一定周期で繰り返し実施される。
図7は、実施例1に係る地上装置103の動作の一例を示すフローチャートである。図7に示すフローチャートは、地上装置103の障害物情報管理のための全体処理手順を示す。
まず、サーバ障害物情報受信部131は、管理エリアを走行する全列車101からの障害物情報を受信し、サーバ障害物情報統合部132に送信する(S201)。
全列車101からの障害物情報を受信したサーバ障害物情報統合部132は、障害物情報に対してフュージョン処理を実施して統合障害物情報を作成し(S202)、作成した統合障害物情報を全エリアオブジェクト情報136が保持する全エリア障害物情報1361へ記録し、全エリア障害物情報1361を更新したことを障害物情報算出部133に通知する(S203)。
更新通知を受信した障害物情報算出部133は、全エリアオブジェクト情報136が保持する重要度情報1362及び運行管理情報135に基づき、全エリア障害物情報1361から全列車101に送信する障害物情報を抽出し、障害物情報を一次元情報に変換する(S204)。サーバ障害物情報送信部134は,一次元情報に変換された障害物情報を受信し、管理エリアを走行する全列車101に一次元情報に変換された障害物情報を送信する(S205)。
図7のフローチャートに示す処理は、地上装置103が稼働中には一定周期で繰り返し実施される。
図8は、実施例1に係る列車制御装置105における障害物情報の抽出処理の一例を示すフローチャートである。図8に示すフローチャートは、図6のフローチャートにおけるS106の処理である、障害物情報抽出部115による詳細な適用障害物抽出手順を示す。
まず、軌道上走行位置特定部1121は、車上管理オブジェクト情報119が保持する障害物情報1191と列車101が保持する自身の走行記録情報とに基づき、自列車101の走行位置を特定するための処理を実施する(S1061)。そして、軌道上走行位置特定部1121は、特定した走行位置情報を適用障害物情報抽出部1122に送出する。
走行位置情報を受信した適用障害物情報抽出部1122は、受信した自列車101の走行位置に基づき、車上管理オブジェクト情報119に格納されている障害物情報1191及び簡易障害物情報1192に対して、適用する障害物情報を決定する判断処理を実施する(S1062)。
そして、適用障害物情報抽出部1122は、S1062における判断処理を実施すべき障害物情報及び簡易障害物情報があるか否かを確認し(S1063)、判断処理を実施すべき障害物情報がある場合(S1063において有)、判断処理を実施すべき障害物情報が無くなるまで(S1063において無)S1062の処理を繰り返し実行する。
判断処理を実施すべき障害物情報がない場合、適用障害物情報抽出部1122は適用判定されたすべての障害物情報及び簡易障害物情報を抽出する(S1064)。そして、適用障害物情報抽出部1122は、抽出された障害物情報に信頼性の高い緊急に対処すべき障害物情報があるか否かを確認する(S1065)。
緊急に対応すべき障害物情報がある場合(S1065において有)、適用障害物情報抽出部1122は、緊急に対応すべき障害物情報を走行切替判定部1123に送信し、走行切替判定部1123は受信した障害物情報に基づいて走行制御を決定し、車両制御装置118へ走行制御命令を送信する(S1066)。
緊急に対応すべき障害物情報がない場合(S1065において無)、あるいはS1066の処理が完了後、適用障害物情報抽出部1122は、抽出した障害物情報及び簡易障害物情報を障害物情報形式変換部1124へ送信する。障害物情報及び簡易障害物情報を受信した障害物情報形式変換部1124は、すべての簡易障害物情報を特定する(S1067)。
そして、障害物情報形式変換部1124は、特定した簡易障害物情報に対して、確率分布から算出される情報を簡易障害物情報の補完情報として適用し、障害物情報とフュージョン可能な二次元情報を持つデータ形式に変換する(S1068)。
障害物情報形式変換部1124は、変換処理を実施すべき簡易障害物情報があるか否かを確認し(S1069)、変換処理を実施すべき簡易障害物情報がある場合(S1069において有)、障害物情報形式変換部1124は、変換処理を実施すべき障害物情報が無くなるまでS1068を繰り返し実行する。変換処理を実施すべき障害物情報がない場合(S1069において無)、障害物情報形式変換部1124は、二次元変換されたすべての障害物情報を車上障害物情報統合部116へ送信する(S10610)。
図9は、実施例1における簡易障害物情報の変換処理及びフュージョン処理の一例を示す図である。より詳細には、図9は、障害物情報形式変換部1124及び車上障害物情報統合部116が実施する、確率分布を用いた簡易障害物情報の二次元変換処理及びフュージョン処理結果の一例である。
センサ部111によって障害物検知を実施しながら軌道102を走行している列車101において、地上装置103から受信した簡易障害物情報に対して確率分布を適用することにより、自列車101の検出範囲外に存在する障害物の一次元情報から、障害物が存在する範囲を算出することで、二次元の近似障害物情報に変換することができる。
この変換は、時間経過とともに信頼性が低下する障害物情報に対応するため信頼度の閾値を設定し、障害物検知処理の周期ごとに実施し、時間が経つ度に変換時の分散を大きくしていく。これにより、信頼性が低い情報をフュージョン処理から除外することができる。
また、一定時間経過後に、車両が受信した簡易障害物情報に近い領域において障害物を検知した場合,前記の変換処理によって変換された簡易障害物情報と自車両が検知した障害物情報の確率分布を統合することで、障害物情報のノイズや誤差を除去することが可能であり、結果として障害物の検知精度が向上する。
ここに、確率分布の与え方は周知のものであってよいが、一例として、カルマンフィルタを用いた確率分布を与えることが好ましい。
図10は、実施例1に係る地上装置103における障害物情報変換処理の一例を示すフローチャートである。図10に示すフローチャートは、図7のフローチャートにおけるS204の処理である、障害物情報算出部133による詳細な適用障害物抽出手順を示す。
まず、障害物情報変換要否判定部1331は、サーバ障害物情報統合部132から全エリアオブジェクト情報136の更新通知を受信した際、全エリアオブジェクト情報136が保持する全エリア障害物情報1361及び重要度情報1362を取得する(S2081)。
次いで、障害物情報変換要否判定部1331は、取得した全エリア障害物情報1361及び重要度情報1362において、すべての障害物情報に対する重要度を算出し、設定した一定の重要度閾値に基づき、障害物情報変換要否を判定する(S2082)。
この結果、障害物情報変換要否判定部1331は、算出した各障害物情報の重要度が重要度閾値を超える障害物情報があるか否かを確認し(S2083)、重要度閾値を超える障害物情報が存在する場合(S2083において有)、障害物情報変換要否判定部1331は重要度閾値を超えるすべての障害物情報を一次元情報変換部1333に送信する。一方、重要度閾値を超える障害物情報が存在しない場合(S2083において無)、本抽出処理を終了する。
障害物情報を受信した一次元情報変換部1333は、路線情報特定部1332に管理エリアを走行するすべての車両の走行位置の特定を要請し、要請を受けた路線情報特定部1332は、運行管理情報135から各列車101の運行情報を取得し(S2084)、取得した運行情報から各列車101の走行位置情報を特定し、走行位置情報を一次元情報変換部1333に送信する(S2085)。
一次元情報変換部1333は、S2083及びS2085により受信した障害物情報及び各列車101の走行位置情報の位置関係に基づき、列車101に提供すべき障害物情報があるか否かを確認する(S2086)。車両に提供すべき障害物情報が存在しない場合(S2086において無)、本抽出処理を終了する。
列車101に提供すべき障害物情報が存在する場合(S2086において有)、一次元情報変換部1333は、該当する二次元情報を持つ障害物情報を一次元情報のみを持つ簡易障害物情報に変換する(S2087)。
次いで、一次元情報変換部1333は、一次元情報への変換処理を実施すべき障害物情報があるか否かを確認し(S2088)、変換処理を実施すべき障害物情報がある場合(S2088において有)、一次元情報変換部1333は変換処理を実施すべき障害物情報が無くなるまでS2087を繰り返し実行する。そして、変換処理を実施すべき障害物情報がない場合(S2088において無)、一次元情報変換部1333は、一次元情報へ変換されたすべての簡易障害物情報をサーバ障害物情報送信部134へ送信する(S1064)。
図11は、実施例1における障害物情報変換処理の一例を示す図である。より詳細には、図11は、一次元情報変換部1333が実施する、二次元障害物情報の一次元変換処理の一例である。
センサ部111によって障害物検知を実施しながら軌道102を走行している列車101において、障害物と判定された3つの障害物の位置情報をそれぞれ(x1, y1)、(x2, y2)、(x3, y3)とする。ここに、Y軸は軌道102が延びる方向、すなわち列車101の走行方向に沿う軸に設定され、列車101の走行方向前方を正方向とする。同様に、X軸は軌道102を直交する方向に設定され、列車101の右方向を正方向とする。
3つの障害物に関する障害物情報は列車101から地上装置103に送信され、全エリアオブジェクト情報136が保持する全エリア障害物情報1361に格納される。これらの情報を一次元情報変換部1333が一次元情報に変換する場合、それぞれのY座標に関する情報が削除され、代わりに建築限界内外を示す1ビットフラグが付与され、情報が軽量化された簡易障害物情報が作成される。
なお、本実施例では、建築限界内外を示す1ビットフラグを付与しているが、必ずしも付与する必要はない。また建築限界内外を示す1ビットフラグ以外の情報を付与することも可能である。
このように構成される本実施例によれば、列車制御装置105は、少なくとも列車の周辺に存在する障害物の存在を検知して障害物に関する第一の障害物情報を取得し、第一の障害物情報を第一の形式である二次元形式で管理するとともに、地上装置103から取得した、第一の形式よりも情報量が少ない第二の形式である一次元形式の第二の障害物情報(簡易障害物情報)を管理し、第二の障害物情報を二次元形式に変換し、変換した第二の障害物情報と第一の障害物情報とに基づいて障害物を検知している。
従って、本実施例によれば、障害物検知処理を簡略化しつつ適切な障害物検知処理を行うことが可能となる。
より詳細には、本実施例では、全エリアオブジェクト情報136が保持する、全列車101が検出した第二の障害物情報を、地上装置103が各列車101に提供する際に、障害物情報算出部133が、第二の障害物情報を一次元情報である第二の形式に変換して、各列車101が必要な情報を提供している。これにより、他の列車101で検出された第二の障害物情報に対して、各列車101が自列車101に必要な情報の特定に要する時間を低減することができる。
また、地上装置103の障害物情報算出部133が、第二の障害物情報に対する重要度定義を設定し、重要度の高い第二の障害物情報のみを各列車101に提供することで、列車101に提供する情報量を削減し、かつ検知精度を向上することができる。これにより、列車の安全性向上が期待できる。
また、列車101が車上障害物情報統合部116でフュージョン処理を実施する際に、障害物情報抽出部115が、車上管理オブジェクト情報119が保持する簡易障害物情報(第二の障害物情報)1192を確率分布を用いてフュージョン処理が可能な近似二次元障害物情報に変換し、変換した障害物情報を含めてフュージョン処理を実施することで、障害物情報のノイズや誤差を除去し、障害物検知精度を向上できる。
実施例2では、列車101がフュージョン処理を実施して出力した統合障害物情報に基づいて、障害物情報に更新(特に削除)が必要か否かを判定し、更新が必要な障害物情報に対する更新情報を地上装置103へ送信している。そして、更新情報を受信した地上装置103は、受信した更新情報に基づいて、自身が保有する全エリアの障害物情報を更新(削除)する。以下、本実施例において、実施例1と同様の構成には同じ番号を付与して説明を省略する。
図12は、実施例2に係る列車制御システム1の機能構成を示す図である。
本実施例の列車制御装置105は、上述した実施例1の構成に加えて、障害物情報更新判定部220及び障害物更新情報送信部221を有する。
障害物情報更新判定部220は、車上障害物情報統合部116が出力する障害物情報を受信し、各障害物情報に基づいて、地上装置103が保有する全エリアオブジェクト情報136が保持する全エリア障害物情報に対する更新有無を判定する。障害物更新情報送信部221は、障害物情報更新判定部220から受信した各障害物情報に対する更新情報を地上装置103に送信する。
また、本実施例の地上装置103は、障害物更新情報受信部231及びサーバ障害物情報統合/更新部232を有する。
障害物更新情報受信部231は、列車101から受信した全エリア障害物情報に対する更新情報を受信し、その更新情報をサーバ障害物情報統合/更新部232に送信する。サーバ障害物情報統合/更新部232は、受信した全エリア障害物情報に対する更新情報に基づいて、全エリアオブジェクト情報136が保持する全エリア障害物情報1361を更新する処理を実施する。
図13は、実施例2に係る列車制御システム1の動作の一例を示すフローチャートである。図13に示すフローチャートは、実施例2における、列車制御装置105及び地上装置103が実施する全エリア障害物情報の更新処理手順を示す。
まず、障害物情報更新判定部220は、車上障害物情報統合部116から障害物情報を受信し(S301)、また、車上管理オブジェクト情報119が保有する、地上装置103から受信した簡易障害物情報を取得する(S302)。
障害物情報と簡易障害物情報を受信した障害物情報更新判定部220は、障害物情報と簡易障害物情報を比較し、簡易障害物情報に係る障害物が障害物情報に基づいて列車101が識別できたと判断できる場合、該当する簡易障害物情報は削除可能情報と判定し、障害物削除情報を作成する(S303)。
そして、障害物情報更新判定部220は、削除可能と判定された簡易障害物情報があるか否かを確認し(S304)、削除可能と判定された簡易障害物情報が存在する場合(S303において有)、障害物更新情報送信部221はS303で作成した障害物削除情報を地上装置103へ送信する(S305)。
障害物更新情報受信部231を経由して障害物削除情報を受信したサーバ障害物情報統合/更新部232は、障害物削除情報に基づいて、全エリアオブジェクト情報136が保持する全エリア障害物情報1361から障害物情報を削除し(S306)、また、経過時間に基づき、全エリア障害物情報1361の分布情報を更新する。
一方、削除可能と判定された簡易障害物情報が存在しない場合(S304において無)、本処理を終了する。
従って、本実施例の列車制御システム1によっても、上述の実施例1の列車制御システム1と同様の効果を得ることができる。
加えて、地上装置103から受信した簡易障害物情報が、自列車101の列車制御装置105によって走行に影響がないと判断された場合、走行を継続し、併せてその障害物情報を更新する(信頼度を落とす(分散値を大きくする)、情報を最新のものに更新する)ためのリクエストを地上装置103へ送信することで、フュージョン処理に適用する障害物情報の信頼性を向上できるため、障害物検知精度を向上できる。
なお、本発明は上記した実施例に限定されるものではなく、様々な変形例が含まれる。例えば、上記した実施例は本発明を分かりやすく説明するために詳細に説明したものであり、必ずしも説明した全ての構成を備えるものに限定されるものではない。また、ある実施例の構成の一部を他の実施例の構成に置き換えることが可能であり、また、ある実施例の構成に他の実施例の構成を加えることも可能である。また、各実施例の構成の一部について、他の構成の追加・削除・置換をすることが可能である。
また、上記の各構成、機能、処理部、処理手段等は、それらの一部または全部を、例えば集積回路で設計する等によりハードウェアで実現してもよい。また、上記の各構成、機能等は、プロセッサがそれぞれの機能を実現するプログラムを解釈し、実行することによりソフトウェアで実現してもよい。各機能を実現するプログラム、テーブル、ファイル等の情報は、メモリや、ハードディスク、SSD等の記録装置、または、ICカード、SDカード、DVD等の記録媒体に置くことができる。
また、制御線や情報線は説明上必要と考えられるものを示しており、製品上必ずしも全ての制御線や情報線を示しているとは限らない。実際には殆ど全ての構成が相互に接続されていると考えてもよい。
1…列車制御システム 101…列車 103…地上装置 105…列車制御装置 111…センサ部 112…障害物検知部 113…車上障害物情報受信部 114…障害物情報管理部 115…障害物情報抽出部 116…車上障害物情報統合部 117…車上障害物情報送信部 118…車両制御装置 119…車上管理オブジェクト情報 131…サーバ障害物情報受信部 132…サーバ障害物情報統合部 133…障害物情報算出部 134…サーバ障害物情報送信部 135…運行管理情報 136…全エリアオブジェクト情報 220…障害物情報更新判定部 221…障害物更新情報送信部 231…障害物更新情報受信部 232…サーバ障害物情報統合/更新部 1121…軌道上走行位置特定部 1122…適用障害物情報抽出部 1123…走行切替判定部 1124…障害物情報形式変換部 1191…障害物情報(第一の障害物情報) 1192…簡易障害物情報(第二の障害物情報) 1331…障害物情報変換要否判定部 1332…路線情報特定部 1333…一次元情報変換部 1361…全エリア障害物情報 1362…重要度情報
Claims (11)
- 列車に搭載され、前記列車の外部にある外部装置と通信可能に構成された列車制御装置を有し、
前記列車制御装置は、
少なくとも前記列車の周辺に存在する障害物の存在を検知して前記障害物に関する第一の障害物情報を取得し、
前記第一の障害物情報を第一の形式で管理するとともに、前記外部装置から取得した、前記第一の形式よりも情報量が少ない第二の形式である前記障害物に関する第二の障害物情報を管理し、
前記第二の形式である前記第二の障害物情報を前記第一の形式に変換し、変換した前記第二の障害物情報と前記第一の障害物情報とに基づいて前記障害物を検知する
ことを特徴とする列車制御システム。 - 前記列車制御装置は、変換した前記第二の障害物情報と前記第一の障害物情報とに基づく前記障害物の検知結果に基づいて前記列車の走行を制御することを特徴とする請求項1に記載の列車制御システム。
- 前記外部装置は、前記第一の障害物情報を前記第一の形式から前記第二の形式に変換して前記列車制御装置に送信することを特徴とする請求項1に記載の列車制御システム。
- 前記外部装置は、前記第一の障害物情報の重要度を算出し、この重要度が所定の閾値以下の前記第一の障害物情報を前記第一の形式から前記第二の形式に変換して前記列車制御装置に送信することを特徴とする請求項3に記載の列車制御システム。
- 前記列車制御装置は、前記列車の走行位置を特定し、この走行位置に基づいて前記第一の障害物情報及び前記第二の障害物情報のうち検知対象の前提となる前記第一の障害物情報及び前記第二の障害物情報を決定することを特徴とする請求項1に記載の列車制御システム。
- 前記第一の形式は二次元の形式であり、前記第二の形式は、前記列車の走行方向に沿った一次元の形式であることを特徴とする請求項1に記載の列車制御システム。
- 前記列車制御装置は、前記第二の障害物情報に基づく前記障害物が前記第一の障害物情報に基づいて前記列車の走行制御に影響しないか否かを判断し、影響しないと判断したら、影響しないと判断された前記障害物に係る前記第二の障害物情報の削除を要求する障害物削除情報を前記外部装置に送出することを特徴とする請求項1に記載の列車制御システム。
- 前記外部装置は他の前記列車制御装置であることを特徴とする請求項1に記載の列車制御システム。
- 列車に搭載され、前記列車の外部にある外部装置と通信可能に構成された列車制御装置と、
を有し、
前記列車制御装置は、
少なくとも前記列車の周辺に存在する障害物の存在を検知して前記障害物に関する第一の障害物情報を取得し、
前記外部装置から取得した前記障害物に関する第二の障害物情報に基づいて前記障害物の存在確率を算出し、前記第一の障害物情報及び前記存在確率に基づいて前記障害物を検知する
ことを特徴とする列車制御システム。 - 列車に搭載され、前記列車の外部にある外部装置と通信可能に構成されたコンピュータにより実行されるコンピュータプログラムであって、
少なくとも前記列車の周辺に存在する障害物の存在を検知して前記障害物に関する第一の障害物情報を取得する機能と、
前記第一の障害物情報を第一の形式で管理するとともに、前記外部装置から取得した、前記第一の形式よりも情報量が少ない第二の形式である前記障害物に関する第二の障害物情報を管理する機能と、
前記第二の形式である前記第二の障害物情報を前記第一の形式に変換し、変換した前記第二の障害物情報と前記第一の障害物情報とに基づいて前記障害物を検知する機能と
を実現させるコンピュータプログラム。 - 列車の外部に設けられ、前記列車と通信可能に構成されたコンピュータにより実行されるコンピュータプログラムであって、
前記列車が検出した前記列車の周辺に存在する障害物に関する第一の障害物情報を受信して第一の形式である第二の障害物情報として管理する機能と、
前記第二の障害物情報を前記第一の形式よりも情報量が少ない第二の形式に変換して前記列車に送信する機能と
を実現させるコンピュータプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP20821733.1A EP3984807A4 (en) | 2019-06-12 | 2020-06-01 | TRAIN CONTROL SYSTEM AND COMPUTER PROGRAM |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019-109236 | 2019-06-12 | ||
| JP2019109236A JP7269797B2 (ja) | 2019-06-12 | 2019-06-12 | 列車制御システム及びコンピュータプログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020250741A1 true WO2020250741A1 (ja) | 2020-12-17 |
Family
ID=73741785
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/021670 Ceased WO2020250741A1 (ja) | 2019-06-12 | 2020-06-01 | 列車制御システム及びコンピュータプログラム |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP3984807A4 (ja) |
| JP (1) | JP7269797B2 (ja) |
| WO (1) | WO2020250741A1 (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006273123A (ja) | 2005-03-29 | 2006-10-12 | Railway Technical Res Inst | 列車安全運行システム、列車安全運行方法、指令センター |
| JP2011045207A (ja) | 2009-08-24 | 2011-03-03 | Railway Technical Res Inst | 車上情報集約型の高度安全列車制御システム |
| JP2016193669A (ja) * | 2015-04-01 | 2016-11-17 | 株式会社日立製作所 | 障害物検知システム |
| JP2017214041A (ja) * | 2016-06-02 | 2017-12-07 | 株式会社日立製作所 | 車両制御システム |
| JP2019001203A (ja) * | 2017-06-12 | 2019-01-10 | 株式会社日立製作所 | 鉄道運転支援システム |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013121344A2 (en) * | 2012-02-17 | 2013-08-22 | Balaji Venkatraman | Real time railway disaster vulnerability assessment and rescue guidance system using multi-layered video computational analytics |
| JP6336857B2 (ja) * | 2014-08-27 | 2018-06-06 | 株式会社日立製作所 | 車両制御システム及び車両制御装置 |
-
2019
- 2019-06-12 JP JP2019109236A patent/JP7269797B2/ja active Active
-
2020
- 2020-06-01 WO PCT/JP2020/021670 patent/WO2020250741A1/ja not_active Ceased
- 2020-06-01 EP EP20821733.1A patent/EP3984807A4/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006273123A (ja) | 2005-03-29 | 2006-10-12 | Railway Technical Res Inst | 列車安全運行システム、列車安全運行方法、指令センター |
| JP2011045207A (ja) | 2009-08-24 | 2011-03-03 | Railway Technical Res Inst | 車上情報集約型の高度安全列車制御システム |
| JP2016193669A (ja) * | 2015-04-01 | 2016-11-17 | 株式会社日立製作所 | 障害物検知システム |
| JP2017214041A (ja) * | 2016-06-02 | 2017-12-07 | 株式会社日立製作所 | 車両制御システム |
| JP2019001203A (ja) * | 2017-06-12 | 2019-01-10 | 株式会社日立製作所 | 鉄道運転支援システム |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3984807A4 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3984807A1 (en) | 2022-04-20 |
| JP2020199943A (ja) | 2020-12-17 |
| EP3984807A4 (en) | 2024-02-14 |
| JP7269797B2 (ja) | 2023-05-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9128815B2 (en) | Control system for vehicle in a guideway network | |
| US9828011B2 (en) | Communication system for guideway mounted vehicle and method of using the same | |
| WO2018037708A1 (ja) | 車載装置、ログ収集システム | |
| US20200408557A1 (en) | Augmented 3d map | |
| WO2018152899A1 (zh) | 一种安全可靠的实时测速和连续定位的方法、装置及系统 | |
| JP2018508418A (ja) | リモートセンシング及び車両制御のための実時間マシンビジョン並びに点群分析 | |
| CN112540607B (zh) | 路径规划的方法、装置、电子设备及存储介质 | |
| CN114556456A (zh) | 管理系统、管理方法、以及管理程序 | |
| CN111201176A (zh) | 转向架轨道监测 | |
| WO2017208797A1 (ja) | 車両制御システム | |
| US12122435B2 (en) | System and method for real-time detection of trains | |
| WO2023028274A1 (en) | System and method of large-scale autonomous driving validation | |
| CN114884952A (zh) | 车辆监测中的采集数据处理、车辆监测控制方法及装置 | |
| CN118918552A (zh) | 一种无人驾驶状态下的轨道列车防碰撞识别装置及方法 | |
| CN109213114A (zh) | 车载设备配置方法和装置 | |
| WO2019181019A1 (ja) | 障害物検知システムおよび障害物検知方法 | |
| WO2020250741A1 (ja) | 列車制御システム及びコンピュータプログラム | |
| KR102252301B1 (ko) | 재난 관리 서버의 동작 방법 | |
| CN105933401B (zh) | 基于轨边探测站的云服务系统及方法 | |
| US9569448B2 (en) | Operating techniques for a storage network system | |
| KR102521235B1 (ko) | 설비의 이상 유무를 모니터링하는 자율주행 장치 및 그 동작 방법 | |
| WO2018207506A1 (ja) | データ処理装置およびデータ処理方法 | |
| JP7759441B2 (ja) | 車両記録に基づく地面の客観的特性の決定 | |
| AU2015406902A1 (en) | Digital context-aware data collection | |
| CN114757481B (zh) | 一种基于云控平台的机场车辆管控方法和系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20821733 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2020821733 Country of ref document: EP Effective date: 20220112 |