WO2021040250A1 - 빅셀 어레이 및 이를 이용한 라이다 장치 - Google Patents
빅셀 어레이 및 이를 이용한 라이다 장치 Download PDFInfo
- Publication number
- WO2021040250A1 WO2021040250A1 PCT/KR2020/009982 KR2020009982W WO2021040250A1 WO 2021040250 A1 WO2021040250 A1 WO 2021040250A1 KR 2020009982 W KR2020009982 W KR 2020009982W WO 2021040250 A1 WO2021040250 A1 WO 2021040250A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- big cell
- laser
- contact
- unit
- array
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images















































































































































Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4814—Constructional features, e.g. arrangements of optical elements of transmitters alone
- G01S7/4815—Constructional features, e.g. arrangements of optical elements of transmitters alone using multiple transmitters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/93—Lidar systems specially adapted for specific applications for anti-collision purposes
- G01S17/931—Lidar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S5/00—Semiconductor lasers
- H01S5/02—Structural details or components not essential to laser action
- H01S5/026—Monolithically integrated components, e.g. waveguides, monitoring photo-detectors, drivers
- H01S5/0262—Photo-diodes, e.g. transceiver devices, bidirectional devices
- H01S5/0264—Photo-diodes, e.g. transceiver devices, bidirectional devices for monitoring the laser-output
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S5/00—Semiconductor lasers
- H01S5/04—Processes or apparatus for excitation, e.g. pumping, e.g. by electron beams
- H01S5/042—Electrical excitation ; Circuits therefor
- H01S5/0421—Electrical excitation ; Circuits therefor characterised by the semiconducting contacting layers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S5/00—Semiconductor lasers
- H01S5/04—Processes or apparatus for excitation, e.g. pumping, e.g. by electron beams
- H01S5/042—Electrical excitation ; Circuits therefor
- H01S5/0425—Electrodes, e.g. characterised by the structure
- H01S5/04252—Electrodes, e.g. characterised by the structure characterised by the material
- H01S5/04253—Electrodes, e.g. characterised by the structure characterised by the material having specific optical properties, e.g. transparent electrodes
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S5/00—Semiconductor lasers
- H01S5/04—Processes or apparatus for excitation, e.g. pumping, e.g. by electron beams
- H01S5/042—Electrical excitation ; Circuits therefor
- H01S5/0425—Electrodes, e.g. characterised by the structure
- H01S5/04254—Electrodes, e.g. characterised by the structure characterised by the shape
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S5/00—Semiconductor lasers
- H01S5/04—Processes or apparatus for excitation, e.g. pumping, e.g. by electron beams
- H01S5/042—Electrical excitation ; Circuits therefor
- H01S5/0425—Electrodes, e.g. characterised by the structure
- H01S5/04256—Electrodes, e.g. characterised by the structure characterised by the configuration
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S5/00—Semiconductor lasers
- H01S5/10—Construction or shape of the optical resonator, e.g. extended or external cavity, coupled cavities, bent-guide, varying width, thickness or composition of the active region
- H01S5/1071—Ring-lasers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S5/00—Semiconductor lasers
- H01S5/10—Construction or shape of the optical resonator, e.g. extended or external cavity, coupled cavities, bent-guide, varying width, thickness or composition of the active region
- H01S5/18—Surface-emitting [SE] lasers, e.g. having both horizontal and vertical cavities
- H01S5/183—Surface-emitting [SE] lasers, e.g. having both horizontal and vertical cavities having only vertical cavities, e.g. vertical cavity surface-emitting lasers [VCSEL]
- H01S5/18361—Structure of the reflectors, e.g. hybrid mirrors
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S5/00—Semiconductor lasers
- H01S5/10—Construction or shape of the optical resonator, e.g. extended or external cavity, coupled cavities, bent-guide, varying width, thickness or composition of the active region
- H01S5/18—Surface-emitting [SE] lasers, e.g. having both horizontal and vertical cavities
- H01S5/183—Surface-emitting [SE] lasers, e.g. having both horizontal and vertical cavities having only vertical cavities, e.g. vertical cavity surface-emitting lasers [VCSEL]
- H01S5/18361—Structure of the reflectors, e.g. hybrid mirrors
- H01S5/18375—Structure of the reflectors, e.g. hybrid mirrors based on metal reflectors
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S5/00—Semiconductor lasers
- H01S5/10—Construction or shape of the optical resonator, e.g. extended or external cavity, coupled cavities, bent-guide, varying width, thickness or composition of the active region
- H01S5/18—Surface-emitting [SE] lasers, e.g. having both horizontal and vertical cavities
- H01S5/183—Surface-emitting [SE] lasers, e.g. having both horizontal and vertical cavities having only vertical cavities, e.g. vertical cavity surface-emitting lasers [VCSEL]
- H01S5/18361—Structure of the reflectors, e.g. hybrid mirrors
- H01S5/18377—Structure of the reflectors, e.g. hybrid mirrors comprising layers of different kind of materials, e.g. combinations of semiconducting with dielectric or metallic layers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S5/00—Semiconductor lasers
- H01S5/40—Arrangement of two or more semiconductor lasers, not provided for in groups H01S5/02 - H01S5/30
- H01S5/42—Arrays of surface emitting lasers
- H01S5/423—Arrays of surface emitting lasers having a vertical cavity
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S5/00—Semiconductor lasers
- H01S5/005—Optical components external to the laser cavity, specially adapted therefor, e.g. for homogenisation or merging of the beams or for manipulating laser pulses, e.g. pulse shaping
- H01S5/0071—Optical components external to the laser cavity, specially adapted therefor, e.g. for homogenisation or merging of the beams or for manipulating laser pulses, e.g. pulse shaping for beam steering, e.g. using a mirror outside the cavity to change the beam direction
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S5/00—Semiconductor lasers
- H01S5/10—Construction or shape of the optical resonator, e.g. extended or external cavity, coupled cavities, bent-guide, varying width, thickness or composition of the active region
- H01S5/18—Surface-emitting [SE] lasers, e.g. having both horizontal and vertical cavities
- H01S5/183—Surface-emitting [SE] lasers, e.g. having both horizontal and vertical cavities having only vertical cavities, e.g. vertical cavity surface-emitting lasers [VCSEL]
- H01S5/18308—Surface-emitting [SE] lasers, e.g. having both horizontal and vertical cavities having only vertical cavities, e.g. vertical cavity surface-emitting lasers [VCSEL] having a special structure for lateral current or light confinement
- H01S5/18311—Surface-emitting [SE] lasers, e.g. having both horizontal and vertical cavities having only vertical cavities, e.g. vertical cavity surface-emitting lasers [VCSEL] having a special structure for lateral current or light confinement using selective oxidation
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S5/00—Semiconductor lasers
- H01S5/40—Arrangement of two or more semiconductor lasers, not provided for in groups H01S5/02 - H01S5/30
- H01S5/4012—Beam combining, e.g. by the use of fibres, gratings, polarisers, prisms
Definitions
- the present invention relates to a big cell (VCSEL: Vertical Cavity Surface Emitting Laser) array and a lidar device using the same, and more particularly, a big cell array with improved laser beam output efficiency of big cell units included in a big cell array, and a lidar using the same. It relates to the device.
- VCSEL Vertical Cavity Surface Emitting Laser
- VICSEL Very Cavity Surface Emitting Laser
- the big cell can be used in the field of short-distance optical communication, the field of lidar that detects a distance to an object using image sensing and a laser.
- An object of the present invention relates to a big cell array capable of improving laser beam output efficiency.
- An object of the present invention relates to a big cell array having a structure for efficient operation of big cell units.
- An object of the present invention relates to a big cell array arranged to have an efficient yield within a wafer.
- An object of the present invention is to provide a laser output device included in a solid-state LiDAR device.
- Another object of the present invention is to provide a steering component used in a laser output device included in a solid-state LiDAR device.
- Another object of the present invention is to provide a solid-state LiDAR device.
- Another object of the present invention relates to a lidar device capable of improving the measurement distance without affecting human eye health.
- Another object of the present invention relates to a laser output device capable of improving a measurement distance without affecting human eye health.
- Another object of the present invention relates to a lidar device for minimizing an undetected object by minimizing an area not irradiated with an output laser.
- the lidar device includes a laser output unit that irradiates a laser toward an object, and a laser light receiving unit configured to receive a laser returned by reflecting a laser irradiated from the laser output unit to the object, and the laser output
- the unit is disposed on a first surface of the body, and the laser output unit includes a first vixel (Vertical Cavity Surface Emitting Laser) array and a second vixel array, and the first vixel array directs a laser beam in a first direction.
- first vixel Very Cavity Surface Emitting Laser
- a second big cell unit that outputs a first big cell unit and a second big cell unit that outputs a laser beam in a second direction
- the second big cell array includes a third big cell unit that outputs a laser beam in the first direction
- the first The 1 big cell unit and the second big cell unit may be arranged at a first distance, and the distance between the first big cell unit and the third big cell unit may be less than or equal to the first distance.
- the lidar device includes a laser output unit that irradiates a laser toward an object, and a laser light receiving unit configured to receive a laser returned by reflecting a laser irradiated from the laser output unit to the object, and the laser output
- the part is disposed on the first surface of the body
- the laser output unit includes a first VICSEL (Vertical Cavity Surface Emitting Laser) array
- the laser output unit collimates the laser beam output from the first VICSEL array.
- a first optic and a second optic for steering a laser beam output from the first big cell array and the second big cell array wherein the first big cell array includes a first big cell unit and a second big cell unit, and the The first bixel unit outputs a laser having a divergence angle of a first angle, the second bixel unit outputs a laser having a divergence angle of a second angle, and the first sub-optic included in the second optic is the The laser beam output from the first bixel unit is steered in a first direction, and a second sub-optic included in the second optic steers the laser beam output from the second bixel unit in a second direction, and the first The angle formed by the first direction and the second direction is so that an area not irradiated with the laser from the laser output unit is generated between the laser beam output from the bixel unit and the laser beam output from the second bixel unit. It may be less than half of the sum of the first angle and the second angle.
- the lidar device includes a laser output unit that irradiates a laser toward an object, and a laser light receiving unit configured to receive a laser returned by reflecting a laser irradiated from the laser output unit to the object, and the laser output
- the unit is disposed on a body having a first surface
- the laser output unit includes a first vixel (Vertical Cavity Surface Emitting Laser) array and a second vixel array
- the first vixel array outputs a laser beam to 1 horizontal FOV (Horizontal Field Of View) is formed
- the second big cell array outputs a laser beam to form a second horizontal FOV
- the first horizontal FOV and the second horizontal FOV are the first axis-the
- the first axis represents the horizontal axis of the first plane-and overlaps with the first region
- the first region is a laser beam in a direction in which the first bixel array is perpendicular to the first plane among the first horizontal FOVs.
- the laser output device includes a laser output unit that irradiates a laser toward an object, the laser output unit is disposed on a first surface of the body, and the laser output unit is a first VICSEL (Vertical Cavity Surface Emitting).
- VICSEL Very Cavity Surface Emitting
- the first big cell array includes a first big cell unit that outputs a laser beam in a first direction and a second big cell unit that outputs a laser beam in a second direction
- the The second big cell array includes a third big cell unit that outputs a laser beam in the first direction
- the first big cell unit and the second big cell unit are arranged at a first interval
- the first big cell unit and the The interval of the third big cell unit may be less than or equal to the first interval.
- the laser output device includes a laser output unit that irradiates a laser toward an object, the laser output unit is disposed on a first surface of the body, and the laser output unit is a first VICSEL (Vertical Cavity Surface Emitting). Laser) array, wherein the laser output unit is a first optic for collimating a laser beam output from the first big cell array, and a second steering for a laser beam output from the first big cell array and the second big cell array.
- the first big cell array includes a first big cell unit and a second big cell unit, the first big cell unit outputs a laser having a divergence angle of a first angle, and the second big cell unit is a second big cell unit.
- a laser having a divergence angle of 2 angles is output, and the first sub-optic included in the second optic steers the laser beam output from the first bixel unit in a first direction, and a first sub-optic included in the second optic is 2
- the sub-optic steers the laser beam output from the second vixel unit in a second direction, and between the laser beam output from the first vixel unit and the laser beam output from the second vixel unit from the laser output unit.
- the angle formed by the first direction and the second direction may be less than half of the sum of the first angle and the second angle so that a region where the laser is not irradiated is not generated.
- a distance calculation method is a distance calculation method using a lidar device including a laser output unit, a laser light receiving unit, and a controller, wherein a first laser output unit of the laser output unit outputs a laser beam, and the first 1 A step of acquiring an outgoing light point at which a laser output unit outputs a laser beam, receiving a laser beam reflected from an object among the output laser beams by the light receiving unit, acquiring a light receiving point of the received laser beam, the Calculating a flight distance of the received laser beam based on an outgoing light point and the light receiving point, and a laser output from the first laser output unit, perpendicular to the first laser output unit, based on the flight distance A first imaginary line extending backward in the traveling direction of the beam and a second laser output unit included in the laser output unit and perpendicular to the second laser output unit, and extending rearward in the traveling direction of the laser beam output from the second laser output unit 2 It may include obtaining a distance from a reference point defined based on
- a laser output unit for irradiating a laser toward an object
- a laser light receiving unit for receiving a laser returned by reflecting a laser irradiated from the laser output unit to the object
- the laser output unit Acquires an outgoing light point at which a laser is output and a light receiving point at which the laser beam reflected from the object is received, based on the flight distance of the received laser beam calculated based on the outgoing light point and the light receiving point
- the big cell includes a first DBR layer, a second DBR layer, an active layer disposed between the first DBR layer and the second DBR layer to output a laser beam, and a contact disposed on the first DBR layer.
- a region and a reflector disposed on the contact region, the reflector having a first surface facing the contact region, and the first surface reflecting a laser beam output through the contact region from the active layer I can make it.
- the lidar device includes a laser output unit that irradiates a laser toward an object, and a laser light receiving unit configured to receive a laser returned by reflecting a laser irradiated from the laser output unit to the object, and the laser output
- the part includes a plurality of VICSEL (Vertical Cavity Surface Emitting Laser) emitters, and the VICSEL emitter is disposed between a first DBR layer, a second DBR layer, the first DBR layer, and the second DBR layer.
- VICSEL Very Cavity Surface Emitting Laser
- An active layer for outputting a laser beam a contact area disposed on the first DBR layer, and a reflector disposed on the contact area, wherein the reflector has a first surface facing the contact area, and the The first surface may reflect a laser beam output from the active layer through the contact area.
- a big cell array includes a first sub-array including a plurality of VICSEL (Vertical Cavity Surface Emitting Laser) units arranged along a first axis, a first upper contact, and a first lower contact, and the first
- VICSEL Very Cavity Surface Emitting Laser
- a first big cell unit including a first big cell unit, a second upper contact, and a second lower contact included in 1 sub-array, and the second big cell unit included in the first sub-array, the first upper contact, and the second lower contact, and the electrical connection.
- a first contact connected to each other, and a second contact electrically connected to the second upper contact and the first lower contact, wherein a first voltage is applied to the first contact, and the first contact is applied to the second contact.
- the big cell array includes a first sub-array including a plurality of VICSEL (Vertical Cavity Surface Emitting Laser) units disposed along a first axis, a first upper distributed bragg reflector (DBR), and a first lower DBR.
- VICSEL Very Cavity Surface Emitting Laser
- first big cell unit a first big cell unit, a second upper DBR, and a second lower DBR included in the first sub-array, and a second big cell unit included in the first sub-array, the first upper DBR, and the first 2
- first contact electrically connected to an upper DBR
- second contact electrically connected to the first lower DBR and the second lower DBR
- the first upper DBR and the second lower DBR are P-type Doped with
- the second upper DBR and the first lower DBR are doped with an N-type
- a first voltage is applied to the first contact
- a second voltage smaller than the first voltage is applied to the second contact
- the second big cell unit may be operated.
- a big cell array includes a first sub-array including a plurality of VICSEL (Vertical Cavity Surface Emitting Laser) units arranged along a first axis, a first Distributed Bragg Reflector (DBR), and a second DBR, , Including a first big cell unit, a third DBR and a fourth DBR included in the first sub-array, and the second big cell unit included in the first sub-array, the first DBR and the third DBR and electrically A first contact connected, and a second contact electrically connected to the second DBR and the fourth DBR, wherein the first DBR and the fourth DBR are doped with a first property, and the second DBR and The third DBR is doped with a second property different from the first property, the reflectance of the second DBR is greater than that of the first DBR, the reflectance of the fourth DBR is greater than that of the third DBR, When a first voltage is applied to the first contact and a second voltage smaller than the first voltage is applied to the VICSEL
- the lidar device includes a laser output unit that irradiates a laser toward an object, and a laser light receiving unit configured to receive a laser returned by reflecting a laser irradiated from the laser output unit to the object, and the laser output
- the unit includes a first sub-array, a first upper contact, and a first lower contact including a plurality of VICSEL (Vertical Cavity Surface Emitting Laser) units disposed along a first axis, and included in the first sub-array.
- VICSEL Very Cavity Surface Emitting Laser
- a first contact including a first big cell unit, a second upper contact, and a second lower contact, and electrically connected to a second big cell unit included in the first sub-array, the first upper contact, and the second lower contact , And a second contact electrically connected to the second upper contact and the first lower contact, wherein a first voltage is applied to the first contact, and a second voltage is smaller than the first voltage to the second contact.
- the lidar device includes a laser output unit that irradiates a laser toward an object, and a laser light receiving unit configured to receive a laser returned by reflecting a laser irradiated from the laser output unit to the object, and the laser output
- the unit includes a first sub-array including a plurality of VICSEL (Vertical Cavity Surface Emitting Laser) units disposed along a first axis, a first upper Distributed Bragg Reflector (DBR), and a first lower DBR, and the first Including a first big cell unit, a second upper DBR, and a second lower DBR included in the sub-array, and the second big cell unit included in the first sub-array, the first upper DBR, and the second upper DBR are electrically A first contact to be connected, and a second contact electrically connected to the first lower DBR and the second lower DBR, wherein the first upper DBR and the second lower DBR are doped in a P-type, and the first 2 When the upper DBR and the first V
- the big cell array includes a first sub-array including a first big cell (VCSEL: Vertical Cavity Surface Emitting Laser) unit and a second big cell unit arranged along a first axis, and a common connected to the first sub-array.
- a contact a first contact electrically connected to one end of the common contact, a first resistance indicating a resistance between one end of the first contact and the first big cell unit, and between the first big cell unit and the second big cell unit
- a second contact electrically connected to the other end of the common contact so that the combined resistance of the second resistor representing the resistance of is reduced, and the first bixel unit comprises one end of the common contact than the second bixel unit. It is adjacent, and the second big cell unit may be adjacent to the other end of the common contact than the first big cell unit.
- the big cell array includes a first sub-array including a first big cell (VCSEL: Vertical Cavity Surface Emitting Laser) unit and a second big cell unit arranged along a first axis, and a common connected to the first sub-array.
- a contact a first contact electrically connected to one end of the common contact, and the other end of the common contact so that a difference between the first combined resistance of the first big cell unit and the second combined resistance of the second big cell unit is reduced.
- a second contact electrically connected to, wherein the first combined resistance is a first resistor representing a resistance between one end of the common contact and the first big cell unit, and the other end of the first big cell unit and the common contact.
- Is a combined resistance of a second resistance indicating a resistance between, and the second combined resistance is a third resistance indicating a resistance between one end of the common contact and the second big cell unit, and another between the second big cell unit and the common contact. It may be a composite resistance of the fourth resistor representing the resistance between one end.
- a lidar device includes a laser output unit for irradiating a laser toward an object, and a laser light receiving unit for receiving a laser reflected from the laser output unit and returned to the object, and the laser
- the output unit includes a first sub-array including a first VCSEL (Vertical Cavity Surface Emitting Laser) unit and a second vic-cell unit disposed along a first axis, a common contact connected to the first sub-array, and the common contact.
- VCSEL Very Cavity Surface Emitting Laser
- a lidar device includes a laser output unit for irradiating a laser toward an object, and a laser light receiving unit for receiving a laser reflected from the laser output unit and returned to the object, and the laser
- the output unit includes a first sub-array including a first VCSEL (Vertical Cavity Surface Emitting Laser) unit and a second vic-cell unit disposed along a first axis, a common contact connected to the first sub-array, and the common contact.
- a first contact electrically connected to one end, and a first contact electrically connected to the other end of the common contact to reduce a difference between the first combined resistance of the first big cell unit and the second combined resistance of the second big cell unit.
- the first combined resistance is a first resistance indicating a resistance between one end of the common contact and the first big cell unit, and a first resistance indicating a resistance between the first big cell unit and the other end of the common contact.
- 2 is a combined resistance of resistors
- the second combined resistance is a third resistor representing a resistance between one end of the common contact and the second big cell unit, and a resistance between the second bixell unit and the other end of the common contact. It may be a composite resistance of the fourth resistor.
- the laser output device includes a first big cell unit including a first big cell emitter and a second big cell emitter, and a second big cell unit including a third big cell emitter and a fourth big cell emitter.
- the first microlens element disposed in the same manner, the second microlens element disposed in correspondence with the second vixel emitter, the third microlens element disposed in correspondence with the third vixel emitter, and the fourth vixel emitter.
- a fourth microlens element arranged in correspondence, wherein the prism array is arranged in correspondence with the first vixel unit, and a first prism element for steering a laser output from the first vixel unit at a first angle, and the A second prism element disposed in correspondence with the second big cell unit and for steering the laser output from the second big cell unit at a second angle, wherein the first big cell unit and the second big cell unit operate independently of each other.
- the first and second big cell emitters share a first N-contact and a first P-contact
- the third and fourth big cell emitters share a second N-contact and a second P-contact
- the first angle and the second angle may be different.
- a laser output device includes a big cell array including a first big cell emitter for outputting a laser, a micro lens array for collimating a laser output from the big cell array, and a laser collimated from the micro lens array.
- a prism array for steering wherein the micro lens array includes a first micro lens element for collimating the first laser output from the first big cell emitter, and collimation from the first micro lens element
- the first laser is a first divergence angle
- the prism array includes a first prism element for steering the first laser, the refractive index of the first prism element is n, and the inclination angle of the first prism element is In the case of, the inclination angle of the first prism element is It can be formed to satisfy.
- the laser output device includes a big cell array including a first big cell unit including a first big cell emitter and a second big cell emitter, a micro lens array for collimating a laser output from the big cell array, and the Including a prism array for steering the collimated laser from the micro lens array, wherein the micro lens array is disposed corresponding to the first micro lens element and the second big cell emitter disposed in correspondence with the first big cell emitter And a second micro lens element, wherein the micro lens array is disposed to correspond to the first big cell unit, and includes a first micro lens unit including the first micro lens element and the second micro lens element, ,
- the prism array is disposed to correspond to the first big cell unit and includes a first prism element for steering the laser output from the first big cell unit at a predetermined angle, wherein the diameter of the first big cell unit is the first It is smaller than the diameter of one micro lens unit, and the diameter of the first micro lens unit may be smaller than the length of one side of the first prism element.
- a laser output unit for outputting a laser
- a detector unit for receiving a reflected laser when a laser output from the laser output unit is reflected from an object
- the laser output unit and the detector unit
- a control unit for acquiring a distance to the object based on the laser received from the detector unit, wherein the laser output unit includes a first vixel unit including a first vixel emitter and a second vixel emitter, and A big cell array including a second big cell unit including a third big cell emitter and a fourth big cell emitter, a collimation component for collimating the laser output from the big cell array, and a laser collimated from the collimation component.
- the first and second big cell emitters share a first N-contact and a first P-contact in order to operate the first big cell unit and the second big cell unit independently of each other
- the third and fourth big cell emitters share a second N-contact and a second P-contact
- the control unit includes the first N-contact and the first N-contact so that a laser is irradiated in a first direction at a first time point.
- the laser output unit is operated by energizing the P-contact, and the laser output unit is operated by energizing the second N-contact and the second P-contact so that the laser is irradiated in a direction different from the first direction at a second time point. I can make it.
- the lidar device includes a laser output unit including a plurality of laser output elements for outputting a laser, and a detector unit for receiving the reflected laser when the laser output from the laser output unit is reflected at one point.
- the laser output unit includes a first laser output element and a second laser output element, and the first laser output from the first laser output element and the second laser output from the second laser output element are the lidar device Are output to each have a first light density and a second light density at a point spaced apart by a first distance from the first laser output element and the first laser output element according to a distance between the first laser output element and the second laser output element.
- the first laser When a distance at which the laser and the second laser overlap from the lidar device is determined, and the first laser and the second laser overlap at a point spaced apart from the lidar device by a second distance, the first laser The distance between the output element and the second laser output element is that the optical density of the area where the first and second lasers overlap at the second distance becomes less than or equal to the first optical density, and the distance from the lidar device is increased.
- the larger the size of the area where the first laser and the second laser overlap the greater the size of the area where the first laser and the second laser overlap at a distance of 100m from the lidar device, and the first laser at a distance of 100m. It is set to be 80% or more of the irradiation area of, and the second distance may be longer than the first distance.
- the laser output device includes a first VCSEL unit including at least one VCSEL Emitter (Vertical Cavity surface Emitting Laser Emitter), at least one VCSEL emitter, 1
- the second and fourth big cell units operate to output a fourth laser, turning off the first and third big cell units, and allowing the first and third lasers to overlap at a predetermined distance or more from the laser output device.
- the first and third big cell units are spaced apart from a first distance or more, and the second and fourth big cell units overlap a second distance or more so that the second and fourth lasers overlap at a predetermined distance or more from the laser output device.
- the first and second big cell units may be spaced apart from each other, and the first and second big cell units may be spaced apart from each other by a third distance or less to be disposed adjacent to each other, and the first and second distances may be greater than the third distance.
- the laser output device includes a first VCSEL unit including at least one VCSEL Emitter (Vertical Cavity surface Emitting Laser Emitter), at least one VCSEL emitter, wherein the A second vixel unit that irradiates a second laser at a steering angle different from a steering angle of the first laser output from the first vixel unit, including at least one vixel emitter, the steering angle of the second laser It is different from and includes a third vixel unit that irradiates a third laser at the same steering angle as the steering angle of the first laser, at least one vixel emitter, but is different from the steering angles of the first and third lasers, , A fourth big cell unit for irradiating a fourth laser at a steering angle equal to a steering angle of the second laser, and a control unit for controlling the operation of the first, second, third and fourth big cell units, wherein the control unit Operates the first and third big cell units to output the first and third lasers at
- the second and fourth big cell units Operate the second and fourth big cell units to output 2 and 4 lasers, but turn off the first and third big cell units, and the first and second big cell units are in a first big cell array (VCSEL Array).
- the third and fourth big cell units are included in a second big cell array (VCSEL Array), and the first and third lasers are overlapped at a predetermined distance or more, but as the distance from the laser output device increases, the An area where the first and third lasers overlap increases, and the second and fourth lasers overlap at a predetermined distance or more, but as the distance from the laser output device increases, the second and fourth lasers overlap.
- the first and second big cell arrays are increased so that They can be spaced apart on the same plane.
- the lidar device includes a first VCSEL unit including at least one VCSEL emitter (Vertical Cavity surface Emitting Laser Emitter), at least one VCSEL emitter, wherein the A second vixel unit that irradiates a second laser at a steering angle different from a steering angle of the first laser output from the first vixel unit, including at least one vixel emitter, the steering angle of the second laser It is different from and includes a third vixel unit that irradiates a third laser at the same steering angle as the steering angle of the first laser, at least one vixel emitter, but is different from the steering angles of the first and third lasers, , A fourth big cell unit that irradiates a fourth laser at a steering angle equal to a steering angle of the second laser, and a detector configured to receive the reflected laser when at least some of the first to fourth lasers are reflected from the object And a control unit for controlling the operation of the first, second, third and fourth big
- control unit When distance information is not obtained, the control unit operates the first and third big cell units to output the first and third lasers at a third time point, and obtains distance information for a second object at the second time point.
- the controller may operate the second big cell unit to output the second laser at a fourth time point.
- a lidar that acquires distance information from an object using lasers output from a plurality of VCSEL units including at least one VCSEL Emitter (Vertical Cavity Surface Emitting Laser Emitter) according to an embodiment.
- the method of obtaining distance information of the device includes operating a first vixel unit at a first point in time to output a first laser, and operating a second vixel unit at a second point in time different from the first point in time to operate at an angle different from the first laser.
- An autonomous vehicle includes a lidar device for measuring a distance between a vehicle body and an object, wherein the lidar device includes at least one VCSEL Emitter (Vertical Cavity Surface Emitting Laser Emitter).
- the lidar device includes at least one VCSEL Emitter (Vertical Cavity Surface Emitting Laser Emitter).
- VCSEL Emitter Very Cavity Surface Emitting Laser Emitter
- at least A fourth bixel unit including at least one bixel emitter, which is different from a steering angle of the first and third lasers and irradiates a fourth laser at the same steering angle as the steering angle of the second laser, and the first,
- a control unit for controlling the operation of the second, third and fourth big
- a big cell array capable of improving laser beam output efficiency may be provided.
- a big cell array having a structure for efficient operation of big cell units can be provided.
- a big cell array arranged to have an efficient yield within a wafer can be provided.
- a laser output device included in a solid-state LiDAR device may be provided.
- a steering component used in a laser output device included in a solid-state LiDAR device may be provided.
- a solid-state LiDAR device may be provided.
- a lidar device capable of improving a measurement distance without affecting human eye health may be provided.
- a laser output device capable of improving a measurement distance without affecting human eye health can be provided.
- a lidar device for minimizing an undetected object by minimizing an area not irradiated with a laser may be provided.
- FIG. 1 is a diagram for describing a lidar device according to an exemplary embodiment.
- FIG. 2 is a diagram illustrating a lidar device according to an embodiment.
- FIG 3 is a view showing a laser output unit according to an embodiment.
- FIG. 4 is a diagram showing a VCSEL unit according to an embodiment.
- FIG. 5 is a diagram showing a VCSEL array according to an embodiment.
- FIG. 6 is a side view showing a VCSEL array and a metal contact according to an embodiment.
- FIG. 7 is a diagram illustrating a VCSEL array according to an embodiment.
- FIG. 8 is a diagram for describing a LiDAR device according to an exemplary embodiment.
- FIG. 9 is a diagram for describing a collimation component according to an embodiment.
- FIG. 10 is a diagram for describing a collimation component according to an embodiment.
- FIG. 11 is a diagram for describing a collimation component according to an embodiment.
- FIG. 12 is a diagram for describing a collimation component according to an embodiment.
- FIG. 13 is a diagram for describing a steering component according to an exemplary embodiment.
- FIGS. 14 and 15 are diagrams for describing a steering component according to an exemplary embodiment.
- 16 is a diagram for describing a steering component according to an exemplary embodiment.
- 17 is a diagram for describing a steering component according to an exemplary embodiment.
- FIG. 18 is a diagram for describing a meta surface according to an exemplary embodiment.
- 19 is a diagram for describing a meta surface according to an exemplary embodiment.
- 20 is a diagram for describing a metasurface according to an exemplary embodiment.
- 21 is a diagram for describing an optical unit according to an exemplary embodiment.
- 22 is a diagram for describing an optical unit according to an exemplary embodiment.
- FIG. 23 is a diagram for describing a meta component according to an embodiment.
- 24 is a diagram for describing a meta component according to another embodiment.
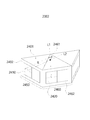
- 25 is a diagram illustrating a big cell module according to an embodiment.
- 26 is a diagram illustrating a laser output unit according to an exemplary embodiment.
- 27 to 29 are diagrams illustrating a big cell module according to an embodiment.
- 30 to 31 are views viewed from above of a horizontal FOV of a big cell module according to an embodiment.
- 32 to 34 are views as viewed from the front of the horizontal FOV of the big cell module according to an embodiment.
- 35 is a diagram illustrating a lidar device according to an embodiment.
- 36 to 37 are diagrams illustrating a big cell module according to another embodiment.
- FIG. 40 is a diagram illustrating a LiDAR device according to another exemplary embodiment.
- 41 to 42 are diagrams illustrating a laser output unit according to an exemplary embodiment.
- 43 is a diagram illustrating reference points for measuring distances between big cell modules according to an exemplary embodiment.
- 44 is a diagram illustrating reference points for measuring distances between big cell modules according to another embodiment.
- 45 to 47 are diagrams illustrating reference points for measuring distances between big cell modules according to another embodiment.
- 48 to 50 are diagrams illustrating a reference point for measuring a distance in a big cell module according to an exemplary embodiment.
- 51 to 52 are diagrams illustrating a reference point for measuring a distance in a big cell module according to another embodiment.
- 53 to 54 are diagrams illustrating a reference point for measuring a distance in a big cell module according to another embodiment.
- 55 is a diagram illustrating a view from above of a big cell array according to an embodiment.
- 56 is a diagram illustrating a view from above of a big cell array according to another embodiment.
- 57 to 58 are diagrams illustrating a LiDAR device according to an exemplary embodiment.
- 59 to 60 are diagrams illustrating a LiDAR device according to another exemplary embodiment.
- 61 is a diagram illustrating a cross-sectional view of a big cell emitter according to an embodiment.
- FIG. 62 is a diagram illustrating a big cell emitter according to another embodiment.
- 63 is a diagram illustrating a cross-sectional view of a big cell emitter according to another embodiment.
- 64 is a diagram illustrating a cross-sectional view of a big cell emitter according to another embodiment.
- 65 is a diagram illustrating an upper metal contact and a reflector according to an exemplary embodiment.
- 66 is a diagram illustrating a cross-sectional view of a big cell emitter according to another embodiment.
- 67 is a diagram illustrating an upper metal contact and a reflector according to another exemplary embodiment.
- 68 is a diagram illustrating a cross-sectional view of a big cell emitter according to another embodiment.
- 69 is a diagram illustrating an upper metal contact and a reflector according to another embodiment.
- 70 is a diagram illustrating a cross-sectional view of a bottom-emitting big cell emitter according to an embodiment.
- 71 is a diagram illustrating a cross-sectional view of a bottom-emitting big cell emitter according to another embodiment.
- 72 is a diagram for describing a big cell array according to an embodiment.
- 73 is a diagram for describing a big cell array according to another embodiment.
- 74 to 77 are diagrams for explaining resistance of a big cell unit according to an embodiment.
- 78 to 81 are diagrams for explaining resistance of a big cell unit according to another exemplary embodiment.
- 82 is a diagram illustrating a big cell array viewed from one direction.
- 83 is a diagram illustrating a big cell array viewed from another direction.
- FIG. 84 is a diagram for describing a big cell array according to another embodiment.
- 85 is a view showing a big cell array according to another embodiment viewed from one direction.
- 86 is a diagram for describing a big cell array according to an embodiment.
- 87 is a diagram for describing a big cell array according to another embodiment.
- FIG. 88 is a diagram illustrating a connection state and a cross-sectional view of a big cell array according to an embodiment.
- 89 is a diagram illustrating a connection state and a cross-sectional view of a big cell array according to another embodiment.
- 90 is a circuit diagram showing a big cell array according to an embodiment.
- 91 to 97 are diagrams illustrating various embodiments of a big cell array.
- 98 is a diagram illustrating an operation flowchart of a big cell array according to an embodiment.
- 99 is a diagram illustrating an operation sequence of a big cell array according to an embodiment.
- 100 is a view showing a wafer including a big cell array according to an embodiment.
- 101 is a diagram illustrating a layout of a wafer and a big cell array according to an embodiment.
- 102 is a diagram illustrating a layout of a wafer and a big cell array according to another embodiment.
- 103 to 105 are diagrams for describing a measurement distance of a LiDAR device according to an exemplary embodiment.
- 106 is a diagram for describing eye-safety of a lidar device.
- 107 and 108 are diagrams for explaining divergence of a laser according to an exemplary embodiment.
- 109 is a diagram for describing a divergence angle using a profile of a laser according to an exemplary embodiment.
- 110 and 111 are diagrams for describing a laser output unit including a plurality of laser output devices according to an exemplary embodiment.
- 112 is a diagram for describing an overlap distance according to divergence of a laser according to an exemplary embodiment.
- 113 is a view for explaining the overlap distance of the laser according to the distance between the laser output elements.
- 114 is a graph representing a correlation between a distance between laser output elements and an overlap distance for each divergence angle.
- 115 is a diagram for describing an eye-safety standard.
- 116 is a diagram for describing a reference distance and an overlap distance of a laser output unit according to an exemplary embodiment.
- 117 is a graph representing a correlation between the optical density of the laser output from the laser output element and the distance from the laser output element for each divergence angle.
- 118 is a diagram for describing a reference distance and an overlap distance of a laser output unit according to an exemplary embodiment.
- 119 is a diagram illustrating an improved measurement distance of a LiDAR device according to an exemplary embodiment.
- 120 is a diagram for describing a laser output unit according to an exemplary embodiment.
- 121 is a diagram for describing a laser output unit according to an exemplary embodiment.
- 122 is a diagram for describing a laser output unit according to an exemplary embodiment.
- 123 is a diagram for describing an arrangement relationship of a laser output unit according to an exemplary embodiment.
- 124 is a diagram for describing an arrangement relationship of a laser output unit according to another exemplary embodiment.
- 125 is a diagram of a laser having a divergence angle less than a predetermined angle and a laser output unit outputting the same, according to an exemplary embodiment.
- FIG. 126 is a diagram for describing a distance between lasers in FIG. 125.
- 127 is a diagram of a laser having a divergence angle greater than or equal to a predetermined angle and a laser output unit outputting the same, according to an exemplary embodiment.
- FIG. 128 is a diagram for describing a distance between lasers in FIG. 127.
- 129 is a diagram for describing a laser output unit according to an exemplary embodiment.
- 130 is a diagram for describing a laser output unit according to an exemplary embodiment.
- 131 is a diagram for describing a laser output unit according to an exemplary embodiment.
- 132 is a diagram for describing a configuration of a laser output unit according to an exemplary embodiment.
- 133 is a diagram for describing a configuration of a laser output unit according to an exemplary embodiment.
- 134 is a diagram for describing a configuration of a laser output unit according to an exemplary embodiment.
- 135 is a diagram for describing a configuration of a laser output unit according to an exemplary embodiment.
- 136 is a diagram for describing a configuration of a laser output unit according to an exemplary embodiment.
- 137 is a diagram for describing a laser output unit according to an exemplary embodiment.
- 138 is a diagram for describing a configuration of a laser output unit according to an exemplary embodiment.
- 139 is a diagram for describing a configuration of a laser output unit according to an exemplary embodiment.
- 140 is a diagram for describing a steering component according to an exemplary embodiment.
- 141 is a diagram for describing a steering component according to an exemplary embodiment.
- 142 is a diagram for describing a steering component according to an embodiment.
- 143 is a diagram for describing a configuration of a laser output unit according to an exemplary embodiment.
- 144 is a diagram for describing a configuration of a laser output unit according to an exemplary embodiment.
- a laser output unit for irradiating a laser toward an object, and a laser light receiving unit for receiving a laser returned by reflecting a laser irradiated from the laser output unit to the object, and the laser output unit It is disposed on a first surface, and the laser output unit includes a first vixel (Vertical Cavity Surface Emitting Laser) array and a second vixel array, and the first vixel array outputs a laser beam in a first direction.
- first vixel Very Cavity Surface Emitting Laser
- the second bixel array includes a third bixel unit that outputs a laser beam in the first direction, and the first bixel unit
- the second big cell unit may be disposed at a first distance, and a lidar device having a distance between the first big cell unit and the third big cell unit less than the first distance may be provided.
- the first direction may be perpendicular to the first surface.
- the second big cell unit may be adjacent to the first big cell unit.
- the third big cell unit may be adjacent to the first big cell unit.
- the first big cell unit may be disposed on the outermost side of the first big cell array
- the third big cell unit may be disposed on the outermost side of the second big cell array.
- the laser output unit includes a plurality of optics, a first of the plurality of optics collimates a laser beam, and a second of the plurality of optics directs the laser beam in one direction. It can be steered.
- the first optic may be disposed in a direction in which a laser beam is output from a laser output element among the laser output units, and the second optic may be disposed in a direction in which a laser beam is output from the first optic.
- the first big cell array includes a plurality of big cell emitters
- the first optic includes a plurality of sub optics
- the first big cell array includes a plurality of big cell units including a plurality of big cell emitters
- the second optic includes a plurality of sub optics
- the first of the plurality of big cell units One big cell unit and a first sub-optic among the plurality of sub-optics may correspond to each other.
- the first optic may be at least one of a lens, a microlens, a microlens array, and a metasurface.
- the second optic is a lens, a microlens, a microlens array, a prism, a microprism, a microprism array, and a metasurfa. It may be at least one of.
- a main body including a plurality of the bodies may be included, and a horizontal field of view (FOV) of the main body may be the sum of the horizontal FOVs of the plurality of first bodies.
- FOV horizontal field of view
- a main body including a plurality of the bodies is included, and a horizontal FOV (horizontal field of view) of the main body is a horizontal FOV of the body, a steering angle of the first and second big cell arrays, and the It may be defined based on the divergence of the laser beam output from the laser output unit.
- the LiDAR device includes a laser output unit that irradiates a laser toward an object, and a laser light receiving unit that receives a laser reflected from the laser output unit and returned to the object.
- the laser output unit is disposed on the first surface of the body, the laser output unit includes a first vixel (Vertical Cavity Surface Emitting Laser) array, and the laser output unit is output from the first vixel array.
- first vixel Very Cavity Surface Emitting Laser
- a first optic for collimating a laser beam and a second optic for steering a laser beam output from the first and second vixel arrays includes a first vixel unit and a second vixel A unit, wherein the first bixel unit outputs a laser having a divergence angle of a first angle, the second bixel unit outputs a laser having a divergence angle of a second angle, and included in the second optics
- the first sub-optic steers the laser beam output from the first bixel unit in a first direction, and the second sub-optic included in the second optic directs the laser beam output from the second bixel unit in a second direction.
- An angle formed by a direction may be provided with a lidar device that is less than half of the sum of the first angle and the second angle.
- first angle and the second angle may be the same.
- the second big cell unit may be adjacent to the first big cell unit.
- the first optic may be disposed in a direction in which a laser beam is output from a laser output element among the laser output units, and the second optic may be disposed in a direction in which a laser beam is output from the first optic.
- the first big cell array includes a plurality of big cell emitters
- the first optic includes a plurality of sub optics
- the first optic may include a plurality of sub optics, and the first big cell unit and a third sub optic of the plurality of sub optics may correspond to each other.
- the first big cell unit and the first sub-optic may correspond to each other.
- the first optic may be at least one of a lens, a microlens, a microlens array, and a metasurface.
- the second optic is a lens, a microlens, a microlens array, a prism, a microprism, a microprism array, and a metasurfa. It may be at least one of.
- a main body including a plurality of the bodies may be included, and a horizontal field of view (FOV) of the main body may be the sum of the horizontal FOVs of the plurality of first bodies.
- FOV horizontal field of view
- the horizontal FOV (horizontal field of view) of the main body may be defined based on a steering angle and divergence of a laser beam output from the laser output unit included in the body.
- the laser output unit includes a second big cell array
- the first optic collimates a laser beam output from the second big cell array
- the second optic performs a laser beam output from the second big cell array.
- the second big cell array includes a third big cell unit that outputs a laser having a divergence angle of a third angle
- a third sub-optic included in the second optic is a laser output from the third big cell unit.
- the first An angle formed by the first direction and the third direction may be less than half of the sum of the first angle and the third angle.
- first direction and the third direction may be symmetric with respect to a second surface perpendicular to the first surface.
- the first big cell unit and the second big cell unit may be arranged at a first distance, and a distance between the first big cell unit and the third big cell unit may be less than or equal to the first distance.
- the third big cell unit may be adjacent to the first big cell unit.
- the first big cell unit may be disposed on the outermost side of the first big cell array
- the third big cell unit may be disposed on the outermost side of the second big cell array.
- a laser output unit that irradiates a laser toward an object is included, the laser output unit is disposed on a first surface of the body, and the laser output unit is a first VICSEL (Vertical Cavity Surface Emitting Laser) array.
- VICSEL Very Cavity Surface Emitting Laser
- the first big cell array includes a first big cell unit that outputs a laser beam in a first direction and a second big cell unit that outputs a laser beam in a second direction
- the second big cell The array includes a third big cell unit that outputs a laser beam in the first direction, the first big cell unit and the second big cell unit are arranged at a first interval, and the first big cell unit and the third big cell
- a laser output device may be provided in which the unit spacing is less than the first spacing.
- a laser output unit that irradiates a laser toward an object is included, the laser output unit is disposed on a first surface of the body, and the laser output unit is a first VICSEL (Vertical Cavity Surface Emitting Laser) array.
- VICSEL Very Cavity Surface Emitting Laser
- the laser output unit comprises a first optic for collimating the laser beam output from the first vixel array and a second optic for steering the laser beam output from the first vixel array and the second vixel array
- the first big cell array includes a first big cell unit and a second big cell unit
- the first big cell unit outputs a laser having a divergence angle of a first angle
- the second big cell unit is A laser having a divergence angle is output
- a first sub-optic included in the second optic steers the laser beam output from the first bixel unit in a first direction
- a second sub-optic included in the second optic Is steering the laser beam output from the second big cell unit in a second direction
- a laser is irradiated from the laser output unit between the laser beam output from the first big cell unit and the laser beam output from the second big cell unit.
- a laser output device may be provided in which an angle formed by the first direction and the second direction is less than half of the sum of the first angle
- a laser output unit for irradiating a laser toward an object, and a laser light receiving unit for receiving a laser reflected by the laser irradiated from the laser output unit and returned to the object, wherein the laser output unit is a first It is disposed on a body having a surface, and the laser output unit includes a first vixel (Vertical Cavity Surface Emitting Laser) array and a second vixel array, and the first vixel array outputs a laser beam to provide a first horizontal FOV.
- first vixel Very Cavity Surface Emitting Laser
- a lidar device including a FOV formed by outputting a laser beam in a direction perpendicular to the first surface of the second big cell array among the formed FOV and the second horizontal FOV may be provided.
- the irradiation angles of the first horizontal FOV and the second horizontal FOV may be the same.
- the horizontal FOV of the laser output unit may be a sum of the first horizontal FOV and the second horizontal FOV.
- the first big cell array outputs a laser beam to form a first vertical field of view (FOV)
- the second big cell array outputs a laser beam to form a second vertical FOV
- the first vertical field of view The FOV and the irradiation angle of the second vertical FOV may be the same.
- the laser beam irradiation direction of the first big cell array and the laser beam irradiation direction of the second big cell array may be symmetrical with respect to a second axis orthogonal to the first axis.
- the laser beam irradiation direction of the first big cell array and the laser beam irradiation direction of the second big cell array may be symmetrical to each other with respect to a virtual second surface perpendicular to the first surface.
- the laser output unit includes a plurality of optics, a first of the plurality of optics collimates a laser beam, and a second of the plurality of optics directs the laser beam in one direction. It can be steered.
- the first optic may be disposed in a direction in which a laser beam is output from a laser output element among the laser output units, and the second optic may be disposed in a direction in which a laser beam is output from the first optic.
- the first big cell array includes a plurality of big cell emitters
- the first optic includes a plurality of sub optics
- the first big cell array includes a plurality of big cell units including a plurality of big cell emitters
- the second optic includes a plurality of sub optics
- the first of the plurality of big cell units One big cell unit and a first sub-optic among the plurality of sub-optics may correspond to each other.
- the first optic may be at least one of a lens, a microlens, a microlens array, and a metasurface.
- the second optic is a lens, a microlens, a microlens array, a prism, a microprism, a microprism array, and a metasurfa. It may be at least one of.
- the first horizontal FOV includes a first laser beam, which is a laser beam having a large position value of the center of the laser beam relative to the first axis among the outermost laser beams, and the second horizontal FOV is the outermost laser beam.
- a second laser beam which is a laser beam having a small position value of a center of the laser beam with respect to the first axis, may have the same direction as the center of the first laser beam and the center of the second laser beam.
- a center of the first laser beam and a traveling direction of the center of the second laser beam may be perpendicular to the first surface.
- the first horizontal FOV includes a second area that does not overlap with the second horizontal FOV
- the second horizontal FOV includes a third area that does not overlap with the first horizontal FOV
- the second area And the irradiation angle of the third area may be the same.
- the angle of the first horizontal FOV may be 30 degrees.
- a main body including a plurality of the bodies may be included, and a horizontal field of view (FOV) of the main body may be the sum of the horizontal FOVs of the plurality of first bodies.
- FOV horizontal field of view
- a main body including a plurality of the bodies is included, and a horizontal FOV (horizontal field of view) of the main body is a horizontal FOV of the body, a steering angle of the first and second big cell arrays, and the It may be defined based on the divergence of the laser beam output from the laser output unit.
- a distance calculation method using a lidar device including a laser output unit, a laser light receiving unit, and a controller, wherein the first laser output unit of the laser output unit outputs a laser beam, the first laser output Acquiring an outgoing time point for outputting an additional laser beam, receiving a laser beam reflected from an object among the output laser beams by the light receiving unit, acquiring a time point at which the received laser beam is received, the outgoing light time point, and Calculating a flight distance of the received laser beam based on the light-receiving time point, and progress of the laser beam output from the first laser output unit, perpendicular to the first laser output unit, based on the flight distance
- a distance calculation method including acquiring a distance to the object from a reference point defined based on may be provided.
- calculating a distance from the lidar device to the object based on a distance from the reference point to the object and a distance from the reference point to the first laser output unit have.
- a distance from the first laser output unit to the object may include calculating the position of the object based on the angle.
- the reference point is a center point of a sphere having a diameter of the first distance
- the first distance is a third virtual line from the intersection of the first virtual line and the second virtual line-perpendicular to the third laser output unit of the laser output unit, and in a direction of travel of the laser beam output from the third laser output unit. May be the minimum distance to-extending backwards.
- the reference point is a center point of a sphere having a diameter of the first distance
- the first distance is the first virtual line, the second virtual line, and the third virtual line virtual line-is perpendicular to a third laser output unit among the laser output units, and the advance of the laser beam output from the third laser output unit It may be the same as the maximum distance among the distances between intersections among the intersections of-extending backward of the direction.
- the first virtual line may be a virtual line at a first point of the first laser output unit
- the second virtual line may be a virtual line at a second point of the second laser output unit
- the first point may be a central point of the first laser output unit
- the second point may be a central point of the second laser output unit
- the coordinates of the first point calculated using the center point of the first laser output unit as the origin and the coordinates of the second point calculated using the center point of the second laser output unit as the origin may be the same.
- the second laser output unit may form a first angle with respect to the first laser output unit.
- the first angle may be 120 degrees.
- the minimum distance from the reference point to the first laser output unit may be equal to the minimum distance from the reference point to the second laser output unit.
- the minimum distance from the reference point to the first laser output unit may be predetermined.
- a laser output unit that irradiates a laser toward an object, a laser light receiving unit that receives a laser that is returned by reflecting a laser irradiated from the laser output unit to the object, and a laser is output from the laser output unit It is based on the outgoing point of light and the light-receiving point at which the laser beam reflected from the object is received, based on the flight distance of the received laser beam calculated based on the outgoing point of light and the light-receiving point, 1
- a lidar device including a control unit that calculates a distance from a reference point to the object from a reference point defined based on a second virtual line extending backward in a traveling direction of the laser beam output from the output unit may be provided.
- a big cell that can be provided can be provided.
- the contact area and the reflector may abut on the first surface.
- the area of the first surface may be equal to or smaller than the area of the contact area.
- the length of the reflector may be less than or equal to the length of the contact area.
- the reflector may include a conductive material.
- the reflector may include silver (Ag) or aluminum (Al).
- the first surface may include a curved surface.
- the contact region may include titanium (Ti), chromium (Cr), or nickel (Ni).
- the reflectivity of the reflector may be greater than that of the contact area.
- the thickness of the contact region may be 2 nm or less.
- a laser output unit for irradiating a laser toward an object, and a laser light receiving unit for receiving a laser returned by reflecting a laser irradiated from the laser output unit to the object, and the laser output unit
- a VICSEL (Vertical Cavity Surface Emitting Laser) emitter is included, and the VICSEL emitter is disposed between a first DBR layer, a second DBR layer, the first DBR layer, and the second DBR layer to provide a laser beam.
- VICSEL Very Cavity Surface Emitting Laser
- An active layer that outputs, a contact area disposed on the first DBR layer, and a reflector disposed on the contact area, wherein the reflector has a first surface facing the contact area, and the first surface
- a lidar device capable of reflecting a laser beam output from the active layer through the contact area
- VICSEL Very Cavity Surface Emitting Laser
- first upper contact and the second lower contact may be the same metal layer.
- the second upper contact and the first lower contact may be the same metal layer.
- the first voltage may be a positive voltage based on the reference voltage
- the second voltage may be a negative voltage based on the reference voltage
- a first wire electrically connected to the first contact and a second wire electrically connected to the second contact may be included.
- a third big cell unit including a third upper contact and a third lower contact, a third big cell unit included in the first sub-array, a fourth upper contact, and a fourth lower contact, and a third included in the first sub-array.
- 4 a big cell unit, and a third contact electrically connected to the third upper contact and the fourth lower contact, the second contact being electrically connected to the fourth upper contact and the third lower contact,
- the third big cell unit When a third voltage is applied to the second contact and a fourth voltage greater than the third voltage is applied to the third contact, the third big cell unit operates, and the fourth voltage is applied to the second contact.
- the fourth big cell unit may operate.
- a third big cell unit including the first sub-array and a second sub-array disposed along a second axis different from the first axis, a third upper contact, and a third lower contact, and included in the second sub-array
- a fourth big cell unit including a fourth upper contact and a fourth lower contact, and included in the second sub-array, and a third contact electrically connected to the third lower contact and the fourth upper contact, and ,
- the first contact is electrically connected to the third upper contact and the fourth lower contact, a third voltage is applied to the first contact, and a fourth voltage greater than the third voltage is applied to the third contact.
- a first sub-array including a plurality of VICSEL (Vertical Cavity Surface Emitting Laser) units disposed along a first axis, a first upper Distributed Bragg Reflector (DBR), and a first lower DBR, and , A first big cell unit included in the first sub-array, a second upper DBR, and a second lower DBR, and a second big cell unit included in the first sub-array, the first upper DBR, and the second upper part A first contact electrically connected to the DBR, and a second contact electrically connected to the first lower DBR and the second lower DBR, and the first upper DBR and the second lower DBR are doped with a P-type
- the second upper DBR and the first lower DBR are doped with an N-type, a first voltage is applied to the first contact, and a second voltage smaller than the first voltage is applied to the second contact.
- the first voltage may be a positive voltage based on the reference voltage
- the second voltage may be a negative voltage based on the reference voltage
- a common contact electrically connected to the first lower contact and the second lower contact may be included, and the second contact may be electrically connected to the first lower contact and the second lower contact through the common contact.
- a first wire electrically connected to the first contact and a second wire electrically connected to the second contact may be included.
- a third big cell unit including the first sub-array and a second sub-array disposed along a second axis different from the first axis, a third upper DBR, and a third lower DBR, and included in the second sub-array
- a fourth big cell unit including a fourth upper DBR and a fourth lower DBR, included in the second sub-array, and a third contact electrically connected to the third lower DBR and the fourth lower DBR,
- the third upper DBR and the fourth lower DBR are doped with a P-type
- the fourth upper DBR and the third lower DBR are doped with an N-type
- the first contact is the third upper DBR and the third 4
- it may include a third wire electrically connected to the third contact.
- a first sub-array including a plurality of VICSEL (Vertical Cavity Surface Emitting Laser) units disposed along a first axis, a first Distributed Bragg Reflector (DBR), and a second DBR, the Including a first big cell unit, a third DBR, and a fourth DBR included in the first sub-array, and the second big cell unit included in the first sub-array, the first DBR and the third DBR are electrically connected A first contact and a second contact electrically connected to the second DBR and the fourth DBR, wherein the first DBR and the fourth DBR are doped with a first property, and the second DBR and the second contact 3 DBR is doped with a second property different from the first property, the reflectance of the second DBR is greater than that of the first DBR, the reflectance of the fourth DBR is greater than that of the third DBR, When a first voltage is applied to one contact and a second voltage smaller than the first voltage is applied to the second contact, the VICSEL (
- a laser output unit for irradiating a laser toward an object, and a laser light receiving unit for receiving a laser returned by reflecting a laser irradiated from the laser output unit to the object, the laser output unit, the first A first sub-array including a plurality of VICSEL (Vertical Cavity Surface Emitting Laser) units disposed along one axis, a first vixel including a first upper contact and a first lower contact, and included in the first sub-array
- a second big cell unit including a unit, a second upper contact and a second lower contact, and included in the first sub-array, a first contact electrically connected to the first upper contact and the second lower contact, and the A second upper contact and a second contact electrically connected to the first lower contact, wherein a first voltage is applied to the first contact, and a second voltage smaller than the first voltage is applied to the second contact
- the first big cell unit when the first big cell unit is operated, the second voltage is applied to the first contact, and the first voltage is
- a laser output unit for irradiating a laser toward an object, and a laser light receiving unit for receiving a laser returned by reflecting a laser irradiated from the laser output unit to the object, the laser output unit, the first A first sub-array including a plurality of VICSEL (Vertical Cavity Surface Emitting Laser) units disposed along one axis, a first upper DBR (Distributed Bragg Reflector) and a first lower DBR, and the first sub-array A first big cell unit that includes a first big cell unit, a second upper DBR, and a second lower DBR included, and is electrically connected to the second big cell unit included in the first sub-array, the first upper DBR, and the second upper DBR.
- VICSEL Very Cavity Surface Emitting Laser
- the first big cell unit is In operation, when the second voltage is applied to the first contact and the first voltage is applied to the second contact, a lidar device in which the second big cell unit operates may be provided.
- a first sub-array including a first vixel (Vertical Cavity Surface Emitting Laser) unit and a second vixel unit disposed along a first axis, a common contact connected to the first sub-array, A first contact electrically connected to one end of the common contact, a first resistance representing a resistance between one end of the first contact and the first vixel unit, and a resistance between the first vixel unit and the second vixel unit And a second contact electrically connected to the other end of the common contact, so that the combined resistance of the second resistor of is reduced, and the first bixel unit is adjacent to one end of the common contact than the second bixel unit.
- the second big cell unit may be provided with a big cell array adjacent to the other end of the common contact than the first big cell unit.
- the same voltage may be applied to the first contact and the second contact.
- a first wire connecting the common contact and the first contact, and a second wire connecting the common contact and the second contact may be included.
- the first resistance may include the resistance of the first wire.
- the second resistance may include the resistance of the second wire.
- a second sub-array including the first big cell unit and a third big cell unit disposed along a second axis different from the first axis, a third contact disposed adjacent to one end of the second sub-array, and the A fourth contact disposed adjacent to the other end of the second sub-array, the first big cell unit is electrically connected to the third contact, and the third big cell unit is electrically connected to the fourth contact Can be.
- the same voltage may be applied to the third contact and the fourth contact.
- one of a negative voltage and a positive voltage may be applied to the first contact and the second contact, and the other may be applied to the third contact and the fourth contact.
- a third sub-array including the third and fourth big-cell units disposed along the first axis, a fifth contact disposed adjacent to one end of the third sub-array, and the third sub-array And a sixth contact disposed adjacent to the other end, the third big cell unit is electrically connected to the fifth contact, the fourth big cell unit is electrically connected to the sixth contact, and
- a voltage is applied to the first contact, the second contact, the third contact, and the fourth contact, and the fifth contact and the fourth contact 6 No voltage may be applied to the contact.
- a first sub-array including a first vixel (Vertical Cavity Surface Emitting Laser) unit and a second vixel unit disposed along a first axis, a common contact connected to the first sub-array, A first contact electrically connected to one end of the common contact, and the other end of the common contact so that the difference between the first combined resistance of the first big cell unit and the second combined resistance of the second big cell unit is reduced.
- a second contact connected to each other, wherein the first combined resistance is a first resistance representing a resistance between one end of the common contact and the first big cell unit, and a first resistance between the first bixel unit and the other end of the common contact.
- a combined resistance of a second resistor representing a resistance, and the second combined resistance is a third resistor representing a resistance between one end of the common contact and the second big cell unit, and between the second bixel unit and the other end of the common contact.
- a big cell array may be provided, which is a composite resistance of the fourth resistor representing the resistance of.
- the first big cell unit may be closer to one end of the common contact than the second big cell unit, and the second big cell unit may be closer to the other end of the common contact than the first big cell unit.
- the same voltage may be applied to the first contact and the second contact.
- a first wire connecting the common contact and the first contact, and a second wire connecting the common contact and the second contact may be included.
- the first resistance may include the resistance of the first wire.
- the fourth resistance may include the resistance of the second wire.
- a second sub-array including the first vixel unit and the third vixel unit disposed along a second axis different from the first axis, a third contact disposed adjacent to one end of the second sub-array, and And a fourth contact disposed adjacent to the other end of the second sub-array, the first big cell unit is electrically connected to the third contact, and the third big cell unit is electrically connected to the fourth contact May be connected.
- the same voltage may be applied to the third contact and the fourth contact.
- one of a voltage equal to or higher than a reference voltage and a voltage equal to or lower than the reference voltage may be applied to the first contact and the second contact, and the other may be applied to the third contact and the fourth contact.
- a third sub-array including the third and fourth big-cell units disposed along the first axis, a fifth contact disposed adjacent to one end of the third sub-array, and the third sub-array And a sixth contact disposed adjacent to the other end, the third big cell unit is electrically connected to the fifth contact, the fourth big cell unit is electrically connected to the sixth contact, and
- a voltage is applied to the first contact, the second contact, the third contact, and the fourth contact, and the fifth contact and the fourth contact 6 No voltage may be applied to the contact.
- a laser output unit for irradiating a laser toward an object, and a laser light receiving unit for receiving a laser returned by reflecting a laser irradiated from the laser output unit to the object, and the laser output unit
- a first sub-array including a first vixel (Vertical Cavity Surface Emitting Laser) unit and a second vixel unit disposed along a first axis, a common contact connected to the first sub-array, and an electrical at one end of the common contact.
- first vixel Very Cavity Surface Emitting Laser
- a lidar device adjacent to the other end of the common contact than the first big cell unit may be provided.
- a laser output unit for irradiating a laser toward an object, and a laser light receiving unit for receiving a laser returned by reflecting a laser irradiated from the laser output unit to the object, and the laser output unit
- a first sub-array including a first vixel (Vertical Cavity Surface Emitting Laser) unit and a second vixel unit disposed along a first axis, a common contact connected to the first sub-array, and an electrical at one end of the common contact. And a second contact electrically connected to the other end of the common contact so that a difference between the first combined resistance of the first big cell unit and the second combined resistance of the second big cell unit is reduced.
- first vixel Very Cavity Surface Emitting Laser
- the first combined resistance is a first resistance representing a resistance between one end of the common contact and the first big cell unit, and a second resistance representing a resistance between the first bixel unit and the other end of the common contact.
- a combined resistance, wherein the second combined resistance is a third resistance indicating a resistance between one end of the common contact and the second big cell unit, and a fourth resistance indicating a resistance between the second big cell unit and the other end of the common contact
- a lidar device that is a composite resistor of may be provided.
- a first big cell emitter and a third big cell emitter including a first big cell emitter and a second big cell emitter
- a big cell array including a second big cell unit including a fourth big cell emitter a micro lens array for collimating the laser output from the big cell array
- a prism array for steering a laser collimated from the micro lens array.
- the prism array is disposed corresponding to the first big cell unit and output from the first big cell unit
- the first and second big cell emitters share a first N-contact and a first P-contact
- the third and fourth big cell emitters The laser may share a second N-contact and a second P-contact, and the first angle and the second angle may be different laser output devices.
- first N-contact and the second N-contact may be electrically connected to each other, but the first P-contact and the second P-contact may not be electrically connected to each other.
- first P-contact and the second P-contact may be electrically connected to each other, but the first N-contact and the second N-contact may not be electrically connected to each other.
- the diameter of the first microlens element may be larger than the diameter of the first vixel emitter, but may be set based on a distance between the first vixel emitter and the second vixel emitter.
- the first N-contact and the first P-contact are energized so that the laser is output from the first big cell unit at a first time point, and the laser is turned off from the second big cell unit at a second time different from the first time point. It may further include a controller that controls the operation of the big cell array so that the second N-contact and the second P-contact are energized to be output.
- the direction of the laser irradiated from the laser output device at the first time point and the direction of the laser irradiated from the laser output device at the second time point may be different from each other.
- a laser output device used in a lidar device that measures a distance using a laser, comprising: a bixel array including a first bixel emitter for outputting a laser, and a laser output from the bixel array.
- the prism array includes a first prism element for steering the first laser, the refractive index of the first prism element is n, and the inclination angle of the first prism element is In the case of, the inclination angle of the first prism element is A laser output device may be provided that is formed to satisfy.
- the reflectance of the first laser reflected through the first prism element is 10% or less.
- the first angle may be set to 25 degrees or less.
- the big cell array includes a second big cell emitter for outputting a laser
- the micro lens array includes a second micro lens element for collimating the second laser output from the second big cell emitter.
- the first prism element may be disposed to steer the first laser and the second laser at the same angle.
- the big cell array includes a third big cell emitter for outputting a laser
- the micro lens array includes a third micro lens element for collimating the third laser output from the third big cell emitter
- the prism array includes a second prism element for steering the third laser, wherein the third laser collimated from the third microlens element has a second divergence angle Has, the refractive index of the second prism element is m, and the inclination angle of the second prism element is In the case of, the inclination angle of the second prism element is It is disposed to satisfy and the irradiation directions of the first and second lasers and the irradiation directions of the third laser may be different from each other.
- a laser output device used in a lidar device that measures a distance using a laser, comprising: a big cell array including a first big cell emitter and a first big cell unit including a second big cell emitter , A microlens array for collimating the laser output from the big cell array, and a prism array for steering the collimated laser from the micro lens array, wherein the micro lens array corresponds to the first big cell emitter.
- the diameter of the first microlens element may be larger than the diameter of the first vixel emitter, but may be set to correspond to a distance between the first vixel emitter and the second vixel emitter.
- the diameter of the first microlens element may be set to be less than or equal to a sum of the diameter of the first vixel emitter and the distance between the first vixel emitter and the second vixel emitter.
- the big cell array includes a second big cell unit including a third big cell emitter
- the micro lens array includes a third micro lens element disposed in correspondence with the third big cell emitter
- the micro lens The array includes the third microlens element, and includes a second microlens unit disposed in correspondence with the second vixel unit, and the prism array is disposed in correspondence with the second vixel unit, and the second vixel unit And a second prism element for steering the laser output from the laser at a predetermined angle, wherein the distance between the first vixel unit and the second vixel unit is a distance between the first microlens unit and the second microlens unit Is greater than, and a distance between the first micro lens unit and the second micro lens unit may be greater than a distance between the first prism element and the second prism element.
- a lidar device measuring a distance using a laser
- a laser output unit for outputting a laser, and receiving a reflected laser when a laser output from the laser output unit is reflected from an object.
- a detector unit, the laser output unit, and a control unit controlling an operation of the detector unit, and acquiring a distance to the object based on the laser received from the detector unit, wherein the laser output unit 2
- a big cell array including a first big cell unit including a big cell emitter and a second big cell unit including a third big cell emitter and a fourth big cell emitter, and collimation for collimating the laser output from the big cell array
- a steering component for steering a component and a laser collimated from the collimation component, wherein the first and second bixel emitters are configured to operate independently of each other so that the first and second bixel units are operated independently from each other.
- the N-contact and the first P-contact are shared, the third and fourth big cell emitters share the second N-contact and the second P-contact, and the controller is The first N-contact and the first P-contact are energized to be irradiated to operate the laser output unit, and at a second time point, the second N-contact and the second N-contact and the second are irradiated with a laser in a direction different from the first direction.
- a lidar device for operating the laser output unit by energizing the P-contact may be provided.
- the collimation component corresponds to a first microlens element disposed in correspondence with the first vixel emitter, a second microlens element disposed in correspondence with the second vixel emitter, and the third vixel emitter.
- the collimation component includes a first micro lens unit disposed in correspondence with the first vixel unit and a second micro lens unit disposed in correspondence with the second vixel unit, and the diameter of the first micro lens unit Is greater than a diameter of the first big cell unit, and a distance between the first micro lens unit and the second micro lens unit may be smaller than a distance between the first big cell unit and the second big cell unit.
- first N-contact and the second N-contact may be the same, but the first P-contact and the second P-contact may be different from each other.
- first P-contact and the second P-contact may be the same, but the first N-contact and the second N-contact may be different from each other.
- the first laser output from the first big cell emitter is a first divergence angle through the collimation component.
- the steering component includes a first prism element for steering the first laser, the refractive index of the first prism element is n, and the inclination angle of the first prism element is In the case of, the inclination angle of the first prism element is It can be formed to satisfy.
- the reflectance of the first laser reflected through the first prism element is 10% or less.
- the first angle may be set to 25 degrees or less.
- a lidar device that measures a distance using a laser, wherein a laser output unit including a plurality of laser output elements that output a laser, and a laser output from the laser output unit are reflected at a point A detector unit receiving the reflected laser, wherein the laser output unit includes a first laser output device and a second laser output device, and the first laser and the second laser output device are output from the first laser output device.
- the output second laser is output to have a first light density and a second light density, respectively, at a point spaced apart from the lidar device by a first distance, and the first laser output element and the second laser
- the distance at which the first laser and the second laser overlap from the lidar device is determined according to the distance between the output devices, and the first laser and the second laser are separated by a second distance from the lidar device.
- the distance between the first laser output element and the second laser output element is less than the first optical density in the area where the first and second lasers overlap at the second distance.
- the size of an area where the first laser and the second laser overlap increases, and an area where the first laser and the second laser overlap at a distance of 100m from the lidar device.
- the size of is set to be 80% or more of the irradiation area of the first laser at a distance of 100m, and the second distance may be provided with a lidar device that is farther than the first distance.
- the first optical density may be a reference optical density that does not affect human eye health.
- the first distance may be a reference distance for calculating the safety level.
- the plurality of laser output devices may be a VCSEL unit including a plurality of VCSEL emitters.
- the size of the area where the first laser and the second laser overlap is at least 90% of the size of the irradiation area of the first laser at a distance of 200m from the lidar device.
- the distance of can be set.
- the lidar device includes a control unit for controlling the operation of the first laser output device and the second laser output device, and measuring a distance to the one point, the control unit at a first time point.
- the first Controls to output the first and second lasers toward the one point by operating the first and second laser output elements at a second point of view different from the point of view, and using the first laser output at the first point of view
- the first laser output device may be operated at a third point of time different from the first point of time to output the first laser toward the one point.
- the laser output unit further includes a third laser output element and a fourth laser output element, and the third laser output from the third laser output element and the fourth laser output from the fourth laser output element are the la It is output to have a third and fourth optical density at a point spaced apart from the device by the first distance, and the first, second, and third lasers are at a point spaced apart by a third distance from the lidar device.
- the distance between the first, second, and third laser output elements is such that the optical density of the area where the first, second, and third lasers overlap at the third distance is equal to or less than the first optical density.
- the distance of may be set such that the optical density of an area where the first, second, third, and fourth lasers overlap at the fourth distance is equal to or less than the first optical density.
- the first optical density may be a reference optical density that does not affect human eye health.
- the lidar device controls the operation of the first, second, third, and fourth laser output devices, and includes a control unit for measuring a distance to the one point, and the control unit 1
- a laser output element is operated to output the first laser toward the one point, and when the distance to the one point cannot be measured using the first laser output at the first point in time
- the first Control to output the first and second lasers toward the one point by operating the first and second laser output elements at a second point of time different from the first point of view, and the first laser output at the first point of time
- the first laser output element is operated at a third point of time different from the first point of time to output the first laser toward the one point, and the second
- the first, second, and third laser output elements are operated at a fourth point of time different from the second point of time.
- the first and second laser output devices may be operated at a fifth point of time different from the second point of time to output the first and second lasers toward the one point.
- a first bixel unit including at least one VICSEL emitter (Vertical Cavity surface Emitting Laser Emitter) (VCSEL Unit), a second vixel unit including at least one vixel emitter, irradiating a second laser at a steering angle different from a steering angle of the first laser output from the first vixel unit, at least Including at least one bixel emitter, a third bixel unit different from the steering angle of the second laser and irradiating a third laser at the same steering angle as the steering angle of the first laser, at least one bixel emitter Including, but different from the steering angle of the first and third laser, the fourth big cell unit irradiating the fourth laser at the same steering angle as the steering angle of the second laser, and the first, second, third and And a control unit for controlling an operation of a fourth big cell unit, wherein the control unit
- the second and fourth big cell units are spaced apart from each other by a second distance or more so that they overlap above, and the first and second big cell units are spaced apart from each other by a third distance or less to be disposed adjacent to each other, and the first and The second distance is the laser power greater than the third distance
- a device may be provided.
- the first distance and the second distance may be different from each other.
- the first to fourth big cell units may be arranged so that the first and third lasers and the second and fourth lasers overlap each other by 10 cm or more from the laser output device.
- the first to fourth big cell units may be included in one big cell array (VCSEL Array).
- the first distance may be set so that the size of the area where the first and third lasers overlap is 80% or more of the size of the irradiation area of the first laser at a distance of 100m from the laser output device.
- the second distance may be set so that the size of the area where the second and fourth lasers overlap is 80% or more of the size of the irradiation area of the second laser at a distance of 100m from the laser output device.
- a first vixel including at least one vixel emitter (Vertical Cavity surface Emitting Laser Emitter)
- a second vixel unit including at least one vixel emitter and irradiating a second laser at a steering angle different from a steering angle of the first laser output from the first vixel unit
- a third vixel unit including at least one or more vixel emitters, which is different from a steering angle of the second laser and irradiates a third laser at the same steering angle as the steering angle of the first laser
- at least one vixel emitter Including, but different from the steering angles of the first and third lasers, the fourth big cell unit irradiating the fourth laser at the same steering angle as the steering angle of the second laser, and the first, second, and third
- a control unit for controlling an operation of a fourth big cell unit, wherein the control unit operates the first and
- the area where the first and third lasers overlap increases, and the second and fourth lasers overlap at a predetermined distance or more, and the laser output device
- the further the distance from the second and fourth A laser output device in which the first and second big cell arrays are spaced apart on the same plane may be provided so that the area where the laser overlaps is increased.
- a location of the first big cell unit in the first big cell array may correspond to a location of the third big cell unit in the second big cell array.
- a location of the first big cell unit in the first big cell array may be different from a location of the third big cell unit in the second big cell array.
- the first big cell array and the second big cell array may be located on the same substrate.
- first big cell array and the second big cell array include first and second steering components, and the shapes of the first and second steering components may be the same.
- the size of the area where the first and third lasers overlap may be 80% or more of the size of the irradiation area of the first laser at a distance of 100m from the laser output device.
- the size of the area where the second and fourth lasers overlap may be 80% or more of the size of the irradiation area of the second laser at a distance of 100m from the laser output device.
- a lidar device for measuring a distance using a laser a first VCSEL unit including at least one VCSEL Emitter (Vertical Cavity Surface Emitting Laser Emitter), A second vixel unit that includes at least one vixel emitter, and irradiates a second laser at a steering angle different from a steering angle of the first laser output from the first vixel unit, at least one vixel emitter Including, but different from the steering angle of the second laser, a third vixel unit for irradiating a third laser at the same steering angle as the steering angle of the first laser, including at least one vixel emitter, wherein the first A fourth bixel unit that is different from the steering angles of the first and third lasers and irradiates the fourth laser at the same steering angle as the steering angle of the second laser, and at least some of the first to fourth lasers from the object
- control unit operates the first big cell unit to output the first laser at a first time point, and operates the second big cell unit to output the second laser at a second time different from the first time point
- the controller operates the first and third big cell units to output the first and third lasers at a third time point
- the controller may provide a lidar device that operates the second big cell unit to output the second laser at a fourth viewpoint.
- the first and third big cell units are disposed to be spaced apart from a second distance or more so that the first and third lasers overlap at a first distance or more from the laser output device, and the second and fourth lasers are the laser
- the second and fourth big cell units may be disposed to be spaced apart from the output device by a third distance or more to overlap the first distance or more.
- the first distance may be a reference distance for calculating the safety level.
- the size of the area where the first laser and the third laser overlap is 80% or more of the size of the irradiation area of the first laser at a distance of 100m from the lidar device, and the first laser and the third The size of the area where the laser overlaps may be 90% or more of the size of the irradiation area of the first laser at a distance of 200m from the lidar device.
- distance information with respect to an object is obtained using lasers output from a plurality of VCSEL units including at least one VCSEL Emitter (Vertical Cavity Surface Emitting Laser Emitter).
- a method of obtaining distance information of a lidar device comprising: operating a first vixel unit at a first time point to output a first laser, and operating a second vixel unit at a second time point different from the first time point to output the first Outputting a second laser at an angle different from that of the laser, by operating the first and third vixel units at a third time different from the first and second time points to be irradiated at the same angle as the first laser.
- an autonomous vehicle capable of autonomously driving by detecting an object around a vehicle and using the same, includes a lidar device for measuring a distance between the vehicle body and the object, wherein the lidar device A first VCSEL unit including at least one VCSEL emitter (Vertical Cavity surface Emitting Laser Emitter), including at least one biccel emitter, but a first laser output from the first viccel unit A second vixel unit that irradiates a second laser at a steering angle different from the steering angle of, but includes at least one vixel emitter, which is different from the steering angle of the second laser, and is different from the steering angle of the second laser, and the steering of the first laser A third vixel unit that irradiates a third laser at a steering angle equal to the angle, including at least one vixel emitter, different from the steering angle of the first and third lasers, and the same as the steering angle of the second laser.
- VCSEL unit including at least one VCSEL emitter (Vertical
- a fourth big cell unit that irradiates a fourth laser at a steering angle, and a control unit that controls the operation of the first, second, third, and fourth big cell units, wherein the control unit includes the first and the first 3 Operate the first and third big cell units to output a laser, turn off the second and fourth big cell units, and output the second and fourth lasers at a second time different from the first time point.
- An autonomous vehicle may be provided that operates the 2nd and 4th big cell units and turns off the first and third big cell units.
- the first and third big cell units are spaced apart from a first distance or more so that the first and third lasers overlap at a predetermined distance or more from the laser output device, and the second and fourth lasers output the laser.
- the second and fourth big cell units are spaced apart from each other by a second distance or more so that they overlap at a certain distance or more from the device, and the first and second big cell units are spaced apart from each other by a third distance or less so as to be disposed adjacent to each other,
- the first and second distances may be greater than the third distance.
- the lidar device is a device for detecting a distance to an object and a position of the object using a laser.
- the lidar device may output a laser, and when the output laser is reflected from the object, the reflected laser may be received to measure the distance between the object and the lidar device and the position of the object.
- the distance and position of the object may be expressed through a coordinate system.
- the distance and position of the object may be expressed in a spherical coordinate system (r, ⁇ , ⁇ ).
- the present invention is not limited thereto, and may be expressed in a Cartesian coordinate system (X, Y, Z) or a cylindrical coordinate system (r, ⁇ , z).
- the lidar device may use a laser output from the lidar device and reflected from the object to measure the distance of the object.
- the lidar apparatus may use a time of flight (TOF) of the laser until it is sensed after the laser is output in order to measure the distance of the object.
- TOF time of flight
- the lidar device may measure the distance of the object by using a difference between a time value based on an output time of an output laser and a time value based on a sensed time of a laser reflected and sensed by the object.
- the LiDAR device may measure the distance of the object by using a difference between a time value immediately sensed by the output laser without passing through the object and a time value based on the sensed time of the laser reflected from the object.
- the actual outgoing timing of the laser beam can be used.
- an optic is disposed on the laser output element, a laser beam output from the laser output element by the optic may be immediately sensed by a light receiving unit without passing through an object.
- the optic may be a mirror, a lens, a prism, or a meta surface, but is not limited thereto.
- the number of optics may be one, but there may be a plurality of optics.
- a sensor unit is disposed above the laser output device, so that a laser beam output from the laser output device may be immediately sensed by the sensor unit without passing through an object.
- the sensor unit may be spaced apart from the laser output device by a distance of 1mm, 1um, 1nm, etc., but is not limited thereto.
- the sensor unit may be disposed adjacent to the laser output device without being spaced apart.
- An optic may exist between the sensor unit and the laser output device, but is not limited thereto.
- the LiDAR device may use a triangulation method, an interferometry method, a phase shift measurement, etc., in addition to the flight time. Not limited.
- the lidar device may be installed in a vehicle.
- the lidar device may be installed on the roof, hood, headlamp, or bumper of a vehicle.
- a plurality of lidar devices may be installed in a vehicle.
- one lidar device may be for observing the front and the other may be for observing the rear, but is not limited thereto.
- one lidar device may be for observing the left side and the other one for observing the right side, but is not limited thereto.
- the lidar device according to an embodiment may be installed in a vehicle.
- the lidar device when the lidar device is installed inside the vehicle, it may be for recognizing a driver's gesture while driving, but is not limited thereto.
- the lidar device when the lidar device is installed inside the vehicle or outside the vehicle, it may be for recognizing a driver's face, but is not limited thereto.
- the lidar device may be installed on an unmanned aerial vehicle.
- the lidar device is an unmanned aerial vehicle system (UAV system), a drone, a remote piloted vehicle (RPV), an unmanned aerial vehicle system (UAVs), an unmanned aircraft system (UAS), a remote piloted air/aerial system (RPAV). Vehicle) or RPAS (Remote Piloted Aircraft System).
- UAV system unmanned aerial vehicle system
- RSV remote piloted vehicle
- UAVs unmanned aerial vehicle system
- UAS unmanned aircraft system
- RPAV remote piloted air/aerial system
- Vehicle Remote piloted air/aerial system
- RPAS Remote Piloted Aircraft System
- a plurality of lidar devices may be installed on the unmanned aerial vehicle.
- one lidar device may be for observing the front and the other may be for observing the rear, but is not limited thereto.
- one lidar device may be for observing the left side and the other one for observing the right side, but is not limited thereto.
- the lidar device according to an embodiment may be installed in a robot.
- the lidar device may be installed in a personal robot, a professional robot, a public service robot, another industrial robot, or a manufacturing robot.
- a plurality of lidar devices may be installed on the robot.
- one lidar device may be for observing the front side and the other one for observing the rear side, but is not limited thereto.
- one lidar device may be for observing the left and the other may be for observing the right, but is not limited thereto.
- the lidar device according to an embodiment may be installed in the robot.
- a lidar device when installed in a robot, it may be for recognizing a human face, but is not limited thereto.
- the lidar device according to an embodiment may be installed for industrial security.
- LiDAR devices can be installed in smart factories for industrial security.
- a plurality of lidar devices may be installed in a smart factory for industrial security.
- one lidar device may be for observing the front and the other may be for observing the rear, but is not limited thereto.
- one lidar device may be for observing the left and the other may be for observing the right, but is not limited thereto.
- the lidar device according to an embodiment may be installed for industrial security.
- the lidar device when installed for industrial security, it may be for recognizing a person's face, but is not limited thereto.
- FIG. 1 is a diagram for describing a lidar device according to an exemplary embodiment.
- a lidar device 1000 may include a laser output unit 100.
- the laser output unit 100 may emit a laser.
- the laser output unit 100 may include one or more laser output devices.
- the laser output unit 100 may include a single laser output device, may include a plurality of laser output devices, and in the case of including a plurality of laser output devices, a plurality of laser output devices You can configure an array.
- the laser output unit 100 is a laser diode (LD), a solid-state laser, a high power laser, a light entitling diode (LED), a vertical cavity surface emitting laser (VCSEL), an external cavity diode laser (ECDL). It may include, but is not limited thereto.
- LD laser diode
- LED light entitling diode
- VCSEL vertical cavity surface emitting laser
- ECDL external cavity diode laser
- the laser output unit 100 may output a laser having a predetermined wavelength.
- the laser output unit 100 may output a laser of a 905 nm band or a laser of a 1550 nm band.
- the laser output unit 100 may output a laser in a 940 nm band.
- the laser output unit 100 may output a laser including a plurality of wavelengths between 800 nm and 1000 nm.
- some of the plurality of laser output devices may output a laser of a 905 nm band, and other parts may output a laser of a 1500 nm band.
- the lidar apparatus 1000 may include an optical unit 200.
- the optical unit may be variously expressed as a steering unit and a scan unit, but is not limited thereto.
- the optical unit 200 may change the flight path of the laser.
- the optical unit 200 may change the flight path of the laser so that the laser emitted from the laser output unit 100 faces the scan area.
- the flight path of the laser may be changed so that the laser reflected from the object located in the scan area is directed to the sensor unit.
- the optical unit 200 may change the flight path of the laser by reflecting the laser.
- the optical unit 200 may reflect a laser emitted from the laser output unit 100 and change the flight path of the laser so that the laser faces the scan area.
- the flight path of the laser may be changed so that the laser reflected from the object located in the scan area is directed to the sensor unit.
- the optical unit 200 may include various optical means to reflect a laser.
- the optics 200 may include a mirror, a resonance scanner, a MEMS mirror, a Voice Coil Motor (VCM), a polygonal mirror, a rotating mirror, or It may include a galvano mirror or the like, but is not limited thereto.
- VCM Voice Coil Motor
- the optical unit 200 may change the flight path of the laser by refracting the laser.
- the optical unit 200 may refract the laser emitted from the laser output unit 100 to change the flight path of the laser so that the laser is directed toward the scan area.
- the flight path of the laser may be changed so that the laser reflected from the object located in the scan area is directed to the sensor unit.
- the optical unit 200 may include various optical means to refract a laser.
- the optical unit 200 may include, but is not limited to, a lens, a prism, a micro lens, a microfluidie lens, and the like.
- the optical unit 200 may change the flight path of the laser by changing the phase of the laser.
- the optical unit 200 may change the phase of the laser emitted from the laser output unit 100 to change the flight path of the laser so that the laser faces the scan area.
- the flight path of the laser may be changed so that the laser reflected from the object located in the scan area is directed to the sensor unit.
- the optical unit 200 may include various optical means to change the phase of the laser.
- the optical unit 200 may include an optical phased array (OPA), a meta lens, or a meta surface, but is not limited thereto.
- OPA optical phased array
- meta lens a meta lens
- meta surface a meta surface
- the optical unit 200 may include one or more optical means.
- the optical unit 200 may include a plurality of optical means.
- the lidar device 100 may include a sensor unit 300.
- the sensor unit may be variously expressed as a light receiving unit and a receiving unit, but is not limited thereto.
- the sensor unit 300 may detect a laser.
- the sensor unit may detect a laser reflected from an object located in the scan area.
- the sensor unit 300 may receive a laser, and may generate an electric signal based on the received laser.
- the sensor unit 300 may receive a laser reflected from an object positioned within the scan area, and generate an electric signal based on this.
- the sensor unit 300 may receive a laser reflected from an object located in the scan area through one or more optical means, and may generate an electric signal based on this.
- the sensor unit 300 may receive a laser reflected from an object located in the scan area through an optical filter, and may generate an electrical signal based on this.
- the sensor unit 300 may detect a laser based on the generated electrical signal.
- the sensor unit 300 may detect a laser by comparing a predetermined threshold value with a magnitude of the generated electrical signal, but is not limited thereto.
- the sensor unit 300 may detect a laser by comparing a predetermined threshold value with a rising edge, a falling edge, or a median value of a rising edge and a falling edge of the generated electrical signal, but is not limited thereto.
- the sensor unit 300 may detect a laser by comparing a predetermined threshold value with a peak value of the generated electrical signal, but is not limited thereto.
- the sensor unit 300 may include various sensor elements.
- the sensor unit 300 includes a PN photodiode, a phototransistor, a PIN photodiode, APD (Avalanche Photodiode), SPAD (Single-photon avalanche diode), SiPM (Silicon Photo Multipliers), TDC (Time to Digital Converter), It may include a comparator, a complementary metal-oxide-semiconductor (CMOS), or a charge coupled device (CCD), but is not limited thereto.
- CMOS complementary metal-oxide-semiconductor
- CCD charge coupled device
- the sensor unit 300 may be a 2D SPAD array, but is not limited thereto.
- the SPAD array may include a plurality of SPAD units, and the SPAD unit may include a plurality of pixels (SPAD).
- the sensor unit 300 may stack N histograms using a 2D SPAD array.
- the sensor unit 300 may detect a light-receiving point of a laser beam reflected from an object and received light using a histogram.
- the sensor unit 300 may use the histogram to detect a peak point of the histogram as a light-receiving point of a laser beam reflected from an object and received, but is not limited thereto.
- the sensor unit 300 may use the histogram to detect a point where the histogram is equal to or greater than a predetermined value as a light-receiving point of the laser beam reflected from the object and received, but is not limited thereto.
- the sensor unit 300 may include one or more sensor elements.
- the sensor unit 300 may include a single sensor element, or may include a plurality of sensor elements.
- the sensor unit 300 may include one or more optical elements.
- the sensor unit 300 may include an aperture, a micro lens, a converging lens, or a diffuser, but is not limited thereto.
- the sensor unit 300 may include one or more optical filters.
- the sensor unit 300 may receive the laser reflected from the object through an optical filter.
- the sensor unit 300 may include, but is not limited to, a band pass filter, a dichroic filter, a guided-mode resonance filter, a polarizer, and a wedge filter.
- the lidar apparatus 1000 may include a control unit 400.
- the control unit may be variously expressed as a controller or the like in the description for the present invention, but is not limited thereto.
- control unit 400 may control the operation of the laser output unit 100, the optics unit 200, or the sensor unit 300.
- control unit 400 may control the operation of the laser output unit 100.
- control unit 400 may control the timing of the laser output from the laser output unit 100. Also, the control unit 400 may control the power of the laser output from the laser output unit 100. In addition, the controller 400 may control a pulse width of a laser output from the laser output unit 100. In addition, the control unit 400 may control the period of the laser output from the laser output unit 100. In addition, when the laser output unit 100 includes a plurality of laser output elements, the controller 400 may control the laser output unit 100 so that some of the plurality of laser output elements are operated.
- control unit 400 may control the operation of the optical unit 200.
- the controller 400 may control the operating speed of the optics 200.
- the rotational speed of the rotating mirror can be controlled
- the optical unit 200 includes a MEMS mirror the repetition period of the MEMS mirror can be controlled.
- control unit 400 may control the degree of operation of the optical unit 200.
- the optical unit 200 includes a MEMS mirror
- the operation angle of the MEMS mirror may be controlled, but the present invention is not limited thereto.
- control unit 400 may control the operation of the sensor unit 300.
- control unit 400 may control the sensitivity of the sensor unit 300.
- controller 400 may control the sensitivity of the sensor unit 300 by adjusting a predetermined threshold value, but is not limited thereto.
- control unit 400 may control the operation of the sensor unit 300.
- control unit 400 may control the on/off of the sensor unit 300, and when the control unit 300 includes a plurality of sensor elements, the sensor unit may operate some of the sensor elements The operation of 300 can be controlled.
- controller 400 may determine a distance from the lidar device 1000 to an object located in the scan area based on the laser detected by the sensor unit 300.
- the controller 400 may determine a distance to an object located in the scan area based on a time when the laser is output from the laser output unit 100 and a time when the laser is detected by the sensor unit 300 .
- the control unit 400 may output a laser from the laser output unit 100 so that the laser is immediately sensed by the sensor unit 300 without passing through the object and the laser reflected from the object is transmitted to the sensor unit 300.
- the distance to the object located in the scan area may be determined based on the viewpoint detected at.
- the timing at which the lidar apparatus 1000 transmits the trigger signal for emitting the laser beam by the control unit 400 may be a difference between the timing at which the lidar apparatus 1000 transmits the trigger signal for emitting the laser beam by the control unit 400 and the actual timing at which the laser beam is output from the laser output device. Since the laser beam is not actually output between the timing of the trigger signal and the timing of the actual light emission, accuracy may decrease if included in the flight time of the laser.
- the actual outgoing timing of the laser beam can be used.
- the laser beam output from the laser output device must be transmitted to the sensor unit 300 as soon as it is output or without passing through the object.
- an optic is disposed on the laser output element, a laser beam output from the laser output element by the optic may be sensed by the sensor unit 300 directly without passing through an object.
- the optic may be a mirror, a lens, a prism, or a meta surface, but is not limited thereto.
- the number of optics may be one, but there may be a plurality of optics.
- the laser beam output from the laser output device may be detected by the sensor unit 300 directly without passing through the object.
- the sensor unit 300 may be spaced apart from the laser output device by a distance of 1 mm, 1 um, 1 nm, or the like, but is not limited thereto.
- the sensor unit 300 may be disposed adjacent to the laser output device without being spaced apart.
- An optic may exist between the sensor unit 300 and the laser output element, but is not limited thereto.
- the laser output unit 100 may output a laser
- the control unit 400 may obtain a time point at which the laser is output from the laser output unit 100
- the laser output from the laser output unit 100 When is reflected from an object located in the scan area, the sensor unit 300 may detect a laser reflected from the object, and the control unit 400 may acquire a time point at which the laser is sensed by the sensor unit 300, The controller 400 may determine a distance to an object located in the scan area based on the laser output timing and detection timing.
- a laser may be output from the laser output unit 100, and the laser output from the laser output unit 100 will be detected by the sensor unit 300 without passing through an object located in the scan area.
- the controller 400 may acquire a point in time when a laser that has not passed through the object is sensed.
- the sensor unit 300 may detect the laser reflected from the object, and the controller 400 may detect the laser from the sensor unit 300.
- a time point at which is sensed may be obtained, and the controller 400 may determine a distance to an object located in the scan area based on a time point when a laser is detected without passing through the object and a time point when a laser reflected from the object is sensed.
- FIG. 2 is a diagram illustrating a lidar device according to an embodiment.
- a lidar device 1100 may include a laser output unit 100, an optical unit 200, and a sensor unit 300.
- FIG 3 is a view showing a laser output unit according to an embodiment.
- the laser output unit 100 may include a VCSEL emitter 110.
- the VCSEL emitter 110 includes an upper metal contact 10, an upper DBR layer 20, an upper Distributed Bragg reflector, an active layer 40, a quantum well, and a lower DBR layer 30, a lower Distributed Bragg reflector.
- a substrate 50 and a lower metal contact 60 may be included.
- the VCSEL emitter 110 may emit a laser beam vertically from the top surface.
- the VCSEL emitter 110 may emit a laser beam vertically from the surface of the upper metal contact 10.
- the VCSEL emitter 110 may emit a laser beam perpendicular to the acvite layer 40.
- the VCSEL emitter 110 may include an upper DBR layer 20 and a lower DBR layer 30.
- the upper DBR layer 20 and the lower DBR layer 30 may be formed of a plurality of reflective layers.
- a reflective layer having a high reflectivity and a reflective layer having a low reflectance may be alternately disposed.
- the thickness of the plurality of reflective layers may be a quarter of the laser wavelength emitted from the VCSEL emitter 110.
- the upper DBR layer 20 and the lower DBR layer 30 may be doped with p-type and n-type.
- the upper DBR layer 20 may be doped with a p-type
- the lower DBR layer 30 may be doped with an n-type.
- the upper DBR layer 20 may be doped with n-type and the lower DBR layer 30 may be doped with p-type.
- a substrate 50 may be disposed between the lower DBR layer 30 and the lower metal contact 60.
- the substrate 50 may also be a p-type substrate, and when the lower DBR layer 30 is doped with an n-type, the substrate 50 may also become an n-type substrate. have.
- the VCSEL emitter 110 may include an active layer 40.
- the active layer 40 may be disposed between the upper DBR layer 20 and the lower DBR layer 30.
- the active layer 40 may include a plurality of quantum wells generating a laser beam.
- the active layer 40 may emit a laser beam.
- the VCSEL emitter 110 may include a metal contact for electrical connection with a power source or the like.
- the VCSEL emitter 110 may include an upper metal contact 10 and a lower metal contact 60.
- the VCSEL emitter 110 may be electrically connected to the upper DBR layer 20 and the lower DBR layer 30 through a metal contact.
- the upper DBR layer 20 is doped with p-type and the lower DBR layer 30 is doped with n-type
- p-type power is supplied to the upper metal contact 10 so that the upper DBR layer 20 and It is electrically connected
- n-type power is supplied to the lower metal contact 60 to be electrically connected to the lower DBR layer 30.
- n-type power is supplied to the upper metal contact 10 to provide the upper DBR. It is electrically connected to the layer 20, and p-type power is supplied to the lower metal contact 60 to be electrically connected to the lower DBR layer 30.
- the VCSEL emitter 110 may include an oxidation area. Oxidation area may be disposed on top of the active layer.
- the oxidation area may be insulating.
- electrical flow may be restricted in the oxidation area.
- electrical connections may be limited in the oxidation area.
- the oxidation area may serve as an aperture. Specifically, since the oxidation area has insulating properties, the beam generated from the active layer 40 may be emitted only in a portion other than the oxidation area.
- the laser output unit may include a plurality of VCSEL emitters 110.
- the laser output unit may turn on a plurality of VCSEL emitters 110 at once or individually.
- the laser output unit may emit laser beams of various wavelengths.
- the laser output unit may emit a laser beam having a wavelength of 905 nm.
- the laser output unit may emit a laser beam having a wavelength of 1550 nm.
- the wavelength to be output to the laser output unit may be changed according to the surrounding environment.
- the output wavelength may also increase.
- the output wavelength may also decrease.
- the ambient environment may include, but is not limited to, temperature, humidity, pressure, concentration of dust, ambient light amount, altitude, gravity, acceleration, and the like.
- the laser output unit may emit a laser beam in a direction perpendicular to the support surface.
- the laser output unit may emit a laser beam in a direction perpendicular to the emission surface.
- FIG. 4 is a diagram showing a VCSEL unit according to an embodiment.
- the laser output unit 100 may include a VCSEL unit 130.
- the VCSEL unit 130 may include a plurality of VCSEL emitters 110.
- the plurality of VCSEL emitters 110 may be arranged in a honeycomb structure, but the present invention is not limited thereto.
- one honeycomb structure may include seven VCSEL emitters 110, but is not limited thereto.
- all VCSEL emitters 110 included in the VCSEL unit 130 may be irradiated in the same direction.
- all 400 VCSEL emitters 110 included in the VCSEL unit 130 may be irradiated in the same direction.
- the VCSEL unit 130 may be distinguished by the irradiation direction of the output laser beam. For example, when all of the N VCSEL emitters 110 output a laser beam in a first direction, and all of the M VCSEL emitters 110 output a laser beam in a second direction, the N VCSEL emitters 110 ) May be classified as a first VCSEL unit, and the M VCSEL emitters 110 may be classified as a second VCSEL unit.
- the VCSEL unit 130 may include a metal contact.
- the VCSEL unit 130 may include a p-type metal and an n-type metal.
- a plurality of VCSEL emitters 110 included in the VCSEL unit 130 may share a metal contact.
- FIG. 5 is a diagram showing a VCSEL array according to an embodiment.
- the laser output unit 100 may include a VCSEL array 150.
- 5 illustrates an 8X8 VCSEL array, but is not limited thereto.
- the VCSEL array 150 may include a plurality of VCSEL units 130.
- the plurality of VCSEL units 130 may be arranged in a matrix structure, but the present invention is not limited thereto.
- the plurality of VCSEL units 130 may be an N X N matrix, but are not limited thereto. Also, for example, the plurality of VCSEL units 130 may be an N X M matrix, but are not limited thereto.
- the VCSEL array 150 may include a metal contact.
- the VCSEL array 150 may include p-type metal and n-type metal.
- the plurality of VCSEL units 130 may share a metal contact, but they may not share the metal contact and may each have an independent metal contact.
- FIG. 6 is a side view showing a VCSEL array and a metal contact according to an embodiment.
- the laser output unit 100 may include a VCSEL array 151.
- 7 illustrates a 4X4 VCSEL array, but is not limited thereto.
- the VCSEL array 151 may include a first metal contact 11, a wire 12, a second metal contact 13, and a VCSEL unit 130.
- the VCSEL array 151 may include a plurality of VCSEL units 130 arranged in a matrix structure.
- each of the plurality of VCSEL units 130 may be independently connected to a metal contact.
- the plurality of VCSEL units 130 share the first metal contact 11 and are connected together to the first metal contact, and the second metal contact 13 is not shared, so that they are independently connected to the second metal contact. I can.
- the plurality of VCSEL units 130 may be directly connected to the first metal contact 11 and connected to the second metal contact through a wire 12.
- the number of required wires 12 may be the same as the number of a plurality of VCSEL units 130.
- the number of wires 12 may be N * M.
- first metal contact 11 and the second metal contact 13 may be different from each other.
- first metal contact 11 may be an n-type metal
- second metal contact 13 may be a p-type metal
- first metal contact 11 may be a p-type metal
- second metal contact 13 may be an n-type metal.
- FIG. 7 is a diagram illustrating a VCSEL array according to an embodiment.
- the laser output unit 100 may include a VCSEL array 153. 7 illustrates a 4X4 VCSEL array, but is not limited thereto.
- the VCSEL array 153 may include a plurality of VCSEL units 130 arranged in a matrix structure.
- the plurality of VCSEL units 130 may share metal contacts, but may not share metal contacts and may have independent metal contacts.
- the plurality of VCSEL units 130 may share the first metal contact 15 in a row unit.
- the plurality of VCSEL units 130 may share the second metal contact 17 in a column unit.
- first metal contact 15 and the second metal contact 17 may be different from each other.
- first metal contact 15 may be an n-type metal
- second metal contact 17 may be a p-type metal
- first metal contact 15 may be a p-type metal
- second metal contact 17 may be an n-type metal.
- the VCSEL unit 130 may be electrically connected to the first metal contact 15 and the second metal contact 17 through the wire 12.
- the flash method is a method in which a laser beam is spread to an object by the divergence of the laser beam.
- a laser beam of high power is required to direct a laser beam to an object existing at a distance.
- the high power laser beam increases the power because a high voltage must be applied.
- since it can damage the human eye there is a limit to the distance that can be measured by a lidar using the flash method.
- the scanning method is a method of directing a laser beam emitted from the laser output unit in a specific direction.
- Laser power loss can be reduced by directing the scanning method laser beam in a specific direction. Since laser power loss can be reduced, compared to the flash method, even if the same laser power is used, the distance that the lidar can measure is longer in the scanning method. In addition, compared to the flash method, since the scanning method has a lower laser power for measuring the same distance, stability to the human eye may be improved.
- Laser beam scanning can be accomplished by collimation and steering.
- laser beam scanning may be performed by performing a steering method after collimating the laser beam.
- laser beam scanning may be performed in a manner of performing a collimation after steering.
- FIG. 8 is a diagram for describing a LiDAR device according to an exemplary embodiment.
- the lidar device 1200 may include a laser output unit 100 and an optical unit.
- the optical unit may include the BCSC 250.
- the BCSC 250 may include a collimation component 210 and a steering component 230.
- BCSC 250 may be configured as follows.
- the collimation component 210 first collimates the laser beam, and the collimated laser beam may be steered through the steering component 230.
- the steering component 230 may first steer the laser beam, and the steered laser beam may be collimated through the collimation component 210.
- the optical path of the lidar device 1200 is as follows.
- the laser beam emitted from the laser output unit 100 may be directed to the BCSC 250.
- the laser beam incident on the BCSC 250 may be collimated by the collimation component 210 and directed to the steering component 230.
- the laser beam incident on the steering component 230 may be steered and directed toward the object.
- the laser beam incident on the object 500 may be reflected by the object 500 and directed to the sensor unit.
- the laser beam emitted from the laser output unit has directivity, there may be some degree of divergence as the laser beam travels straight. Due to such divergence, the laser beam emitted from the laser output unit may not be incident on the object, or the amount may be very small even if it is incident.
- the degree of divergence of the laser beam When the degree of divergence of the laser beam is large, the amount of the laser beam incident on the object is reduced, and the amount of the laser beam reflected from the object and directed to the sensor unit is also very small by the divergence, so that a desired measurement result may not be obtained.
- the degree of divergence of the laser beam when the degree of divergence of the laser beam is large, the distance that can be measured by the LiDAR device decreases, so that a distant object may not be able to measure.
- the efficiency of the lidar device may be improved as the degree of divergence of the laser beam emitted from the laser output unit is reduced.
- the collimation component of the present invention can reduce the degree of divergence of the laser beam.
- the laser beam that has passed through the collimation component can be parallel light.
- the laser beam passing through the collimation component may have a divergence of 0.4 degrees to 1 degree.
- the amount of light incident on the object may be increased.
- the amount of light reflected from the object is also increased, so that the laser beam can be efficiently received.
- the amount of light incident on the object is increased, compared to before collimating the laser beam, it may be possible to measure an object at a greater distance with the same laser beam power.
- FIG. 9 is a diagram for describing a collimation component according to an embodiment.
- the collimation component 210 may be disposed in a direction in which a laser beam emitted from the laser output unit 100 is directed.
- the collimation component 210 may adjust the degree of divergence of the laser beam.
- the collimation component 210 may reduce the degree of divergence of the laser beam.
- the divergence angle of the laser beam emitted from the laser output unit 100 may be 16 degrees to 30 degrees. At this time, after the laser beam emitted from the laser output unit 100 passes through the collimation component 210, the divergence angle of the laser beam may be 0.4 degrees to 1 degree.
- FIG. 10 is a diagram for describing a collimation component according to an embodiment.
- the collimation component 210 may include a plurality of micro lenses 211 and a substrate 213.
- the microlens may have a diameter of millimeters (mm), micrometers (um), nanometers (nm), picometers (pm), and the like, but is not limited thereto.
- a plurality of micro lenses 211 may be disposed on the substrate 213.
- the plurality of micro lenses 211 and the substrate 213 may be disposed on the plurality of VCSEL emitters 110.
- one of the plurality of micro lenses 211 may be disposed to correspond to one of the plurality of VCSEL emitters 110, but is not limited thereto.
- the plurality of micro lenses 211 may collimate laser beams emitted from the plurality of VCSEL emitters 110.
- the laser beam emitted from one of the plurality of VCSEL emitters 110 may be collimated by one of the plurality of micro lenses 211.
- the divergence angle of the laser beam emitted from one of the plurality of VCSEL emitters 110 may be decreased after passing through one of the plurality of micro lenses 211.
- the plurality of microlenses may be a refractive index distribution lens, a micro-curved lens, an array lens, a Fresnel lens, or the like.
- a plurality of microlenses according to an exemplary embodiment may be manufactured by molding, ion exchange, diffusion polymerization, sputtering, and etching.
- the plurality of micro lenses according to an embodiment may have a diameter of 130um to 150um.
- the diameter of the plurality of micro lenses may be 140 ⁇ m.
- the plurality of micro lenses may have a thickness of 400um to 600um.
- the thickness of the plurality of micro lenses may be 500 ⁇ m.
- FIG. 11 is a diagram for describing a collimation component according to an embodiment.
- the collimation component 210 may include a plurality of micro lenses 211 and a substrate 213.
- a plurality of micro lenses 211 may be disposed on the substrate 213.
- the plurality of micro lenses 211 may be disposed on the front and rear surfaces of the substrate 213.
- an optical axis of the microlens 211 disposed on the surface of the substrate 213 and the microlens 211 disposed on the rear surface of the substrate 213 may be coincident.
- FIG. 12 is a diagram for describing a collimation component according to an embodiment.
- a collimation component may include a metasurface 220.
- the metasurface 220 may include a plurality of nanopillars 221.
- the plurality of nanopillars 221 may be disposed on one side of the meta surface 220.
- the plurality of nanopillars 221 may be disposed on both sides of the meta surface 220.
- the plurality of nanopillars 221 may have a sub-wavelength dimension.
- the spacing between the plurality of nanopillars 221 may be smaller than the wavelength of the laser beam emitted from the laser output unit 100.
- the width, diameter, and height of the nanopillars 221 may be smaller than the length of the wavelength of the laser beam.
- the meta surface 220 may refract the laser beam by adjusting the phase of the laser beam emitted from the laser output unit 100.
- the meta surface 220 may refract laser beams output from the laser output unit 100 in various directions.
- the meta surface 220 may collimate a laser beam emitted from the laser output unit 100.
- the meta-surface 220 may reduce the divergence angle of the laser beam emitted from the laser output unit 100.
- a divergence angle of a laser beam emitted from the laser output unit 100 may be 15 to 30 degrees, and a divergence angle of the laser beam after passing through the meta surface 220 may be 0.4 to 1.8 degrees.
- the meta surface 220 may be disposed on the laser output unit 100.
- the meta surface 220 may be disposed on the emission surface side of the laser output unit 100.
- the meta surface 220 may be deposited on the laser output unit 100.
- the plurality of nanopillars 221 may be formed on the laser output unit 100.
- the plurality of nanopillars 221 may form various nanopatterns on the laser output unit 100.
- the nanopillars 221 may have various shapes.
- the nanopillar 221 may have a shape such as a cylinder, a polygonal column, a cone, and a polygonal pyramid.
- the nanopillars 221 may have an irregular shape.
- FIG. 13 is a diagram for describing a steering component according to an exemplary embodiment.
- the steering component 230 may be disposed in a direction in which a laser beam emitted from the laser output unit 100 is directed.
- the steering component 230 may adjust the direction in which the laser beam is directed.
- the steering component 230 may adjust an angle between the optical axis of the laser light source and the laser beam.
- the steering component 230 may steer the laser beam such that an angle between the optical axis of the laser light source and the laser beam is 0 to 30 degrees.
- the steering component 230 may steer the laser beam such that an angle between the optical axis of the laser light source and the laser beam is -30 degrees to 0 degrees.
- FIGS. 14 and 15 are diagrams for describing a steering component according to an exemplary embodiment.
- the steering component 231 may include a plurality of micro lenses 231 and a substrate 233.
- the plurality of micro lenses 232 may be disposed on the substrate 233.
- the plurality of micro lenses 232 and the substrate 233 may be disposed on the plurality of VCSEL emitters 110.
- one of the plurality of micro lenses 232 may be disposed to correspond to one of the plurality of VCSEL emitters 110, but is not limited thereto.
- the plurality of micro lenses 232 may steer the laser beams emitted from the plurality of VCSEL emitters 110.
- the laser beam emitted from one of the plurality of VCSEL emitters 110 may be steered by one of the plurality of micro lenses 232.
- the optical axis of the micro lens 232 and the optical axis of the VCSEL emitter 110 may not coincide.
- the laser beam emitted from the VCSEL emitter 110 and passed through the micro lens 232 is left Can be headed to.
- the laser beam emitted from the VCSEL emitter 110 and passed through the micro lens 232 Can face to the right.
- the degree of steering of the laser beam may increase. For example, when the distance between the optical axis of the microlens 232 and the optical axis of the VCSEL emitter 110 is 10 ⁇ m, the angle formed by the optical axis of the laser light source and the laser beam may be greater than when the distance between the optical axis of the VCSEL emitter 110 is 1 ⁇ m.
- 16 is a diagram for describing a steering component according to an exemplary embodiment.
- the steering component 234 may include a plurality of micro prisms 235 and a substrate 236.
- a plurality of micro prisms 235 may be disposed on the substrate 236.
- the plurality of micro prisms 235 and the substrate 236 may be disposed on the plurality of VCSEL emitters 110.
- the plurality of micro prisms 235 may be disposed to correspond to one of the plurality of VCSEL emitters 110, but is not limited thereto.
- the plurality of micro prisms 235 may steer the laser beams emitted from the plurality of VCSEL emitters 110.
- the plurality of micro prisms 235 may change an angle between the optical axis of the laser light source and the laser beam.
- the angle formed by the optical axis of the laser light source and the laser beam increases.
- the angle of the micro prism 235 is 0.05 degrees
- the laser beam is steered by 35 degrees
- the angle of the micro prism 235 is 0.25 degrees
- the laser beam is steered by 15 degrees.
- the plurality of micro prism 235 may be a Porro prism, Amici roof prism, Pentaprism, Dove prism, Retroreflector prism, or the like.
- the plurality of micro prisms 235 may be made of glass, plastic, or fluorspar.
- the plurality of micro prisms 235 may be manufactured by molding, etching, or the like.
- 17 is a diagram for describing a steering component according to an exemplary embodiment.
- the steering component may include a meta surface 240.
- the metasurface 240 may include a plurality of nanopillars 241.
- the plurality of nanopillars 241 may be disposed on one side of the meta surface 240.
- the plurality of nanopillars 241 may be disposed on both sides of the meta surface 240.
- the meta surface 240 may refract the laser beam by adjusting the phase of the laser beam emitted from the laser output unit 100.
- the meta surface 240 may be disposed on the laser output unit 100.
- the meta surface 240 may be disposed on the emission surface side of the laser output unit 100.
- the meta surface 240 may be deposited on the laser output unit 100.
- the plurality of nanopillars 241 may be formed on the laser output unit 100.
- the plurality of nanopillars 241 may form various nanopatterns on the laser output unit 100.
- the nanopillars 241 may have various shapes.
- the nanopillar 241 may have a shape such as a cylinder, a polygonal column, a cone, and a polygonal pyramid.
- the nanopillars 241 may have an irregular shape.
- the plurality of nanopillars 241 may form various nanopatterns.
- the meta surface 240 may steer a laser beam emitted from the laser output unit 100 based on the nano pattern.
- the nanopillars 241 may form nanopatterns based on various characteristics.
- the characteristics may include a width (Width, hereinafter W), a pitch (hereinafter P), a height (Height, hereinafter H), and the number per unit length of the nanopillars 241.
- nanopatterns formed based on various characteristics and steering of a laser beam according to the nanopatterns will be described.
- FIG. 18 is a diagram for describing a meta surface according to an exemplary embodiment.
- the metasurface 240 may include a plurality of nanopillars 241 having different widths (W).
- the plurality of nanopillars 241 may form a nanopattern based on the width W.
- the plurality of nanopillars 241 may be arranged such that the widths W1, W2, and W3 increase in one direction.
- the laser beam emitted from the laser output unit 100 may be steered in a direction in which the width W of the nanopillars 241 increases.
- the meta surface 240 has a first nanopillar 243 having a first width W1, a second nanopillar 245 having a second width W2, and a third width W3.
- a third nanopillar 247 may be included.
- the first width W1 may be larger than the second width W2 and the third width W3.
- the second width W2 may be larger than the third width W3. That is, the width W of the nanopillars 241 may decrease from the first nanopillar 243 toward the third nanopillar 247.
- the first nanopillar 243 from the first direction and the third nanopillar 247 emitted from the laser output unit 100 It may be steered in a direction between the second direction, which is a direction toward ).
- the steering angle ⁇ of the laser beam may vary according to an increase/decrease rate of the width W of the nanopillars 241.
- the increase/decrease rate of the width W of the nanopillars 241 may mean a numerical value representing an average increase/decrease of the width W of the plurality of adjacent nanopillars 241.
- the increase/decrease rate of the width W of the nanopillars 241 will be calculated. I can.
- the difference between the first width W1 and the second width W2 may be different from the difference between the second width W2 and the third width W3.
- the steering angle ⁇ of the laser beam may vary depending on the width W of the nanopillars 241.
- the steering angle ⁇ may increase as the increase/decrease rate of the width W of the nanopillar 241 increases.
- the nanopillars 241 may form a first pattern having a first increase/decrease rate based on the width W.
- the nanopillars 241 may form a second pattern having a second increase/decrease rate smaller than the first increase/decrease rate based on the width W.
- the first steering angle according to the first pattern may be greater than the second steering angle according to the second pattern.
- the range of the steering angle ⁇ may be from -90° to 90°.
- 19 is a diagram for describing a meta surface according to an exemplary embodiment.
- the metasurface 240 may include a plurality of nanopillars 241 having different spacings P between adjacent nanopillars 241.
- the plurality of nanopillars 241 may form a nanopattern based on a change in the gap P between adjacent nanopillars 241.
- the meta surface 240 may steer a laser beam emitted from the laser output unit 100 based on a nano pattern formed based on a change in the gap P between the nano pillars 241.
- the distance P between the nanopillars 241 may decrease in one direction.
- the interval P may mean a distance between the centers of two adjacent nanopillars 241.
- the first interval P1 may be defined as a distance between the center of the first nanopillar 243 and the center of the second nanopillar 245.
- the first interval P1 may be defined as the shortest distance between the first nanopillars 243 and the second nanopillars 245.
- the laser beam emitted from the laser output unit 100 may be steered in a direction in which the spacing P between the nanopillars 241 decreases.
- the metasurface 240 may include a first nanopillar 243, a second nanopillar 245, and a third nanopillar 247.
- the first interval P1 may be obtained based on the distance between the first nanopillars 243 and the second nanopillars 245.
- the second interval P2 may be obtained based on the distance between the second nanopillars 245 and the third nanopillars 247.
- the first interval P1 may be smaller than the second interval P2. That is, the distance P may increase from the first nanopillar 243 toward the third nanopillar 247.
- the laser beam emitted from the laser output unit 100 passes through the meta surface 240, the laser beam is emitted from the first direction and the third nanopillar 247 from the laser output unit 100. It may be steered in a direction between the first direction, which is a direction toward the 1 nanopillar 243.
- the steering angle ⁇ of the laser beam may vary according to the distance P between the nanopillars 241.
- the steering angle ⁇ of the laser beam may vary according to an increase/decrease rate of the spacing P between the nanopillars 241.
- the increase/decrease rate of the interval P between the nanopillars 241 may mean a numerical value representing an average degree of change in the interval P between adjacent nanopillars 241.
- the steering angle ⁇ of the laser beam may increase as the increase/decrease rate of the gap P between the nanopillars 241 increases.
- the nanopillars 241 may form a first pattern having a first increase/decrease rate based on the gap P.
- the nanopillars 241 may form a second pattern having a second increase/decrease rate based on the interval P.
- the first steering angle according to the first pattern may be larger than the second steering angle according to the second pattern.
- the principle of steering a laser beam according to a change in the spacing P of the nanopillars 241 described above can be similarly applied even when the number of nanopillars 241 per unit length changes.
- the laser beam emitted from the laser output unit 100 is a first direction emitted from the laser output unit 100 and nanopillars per unit length ( It may be steered in the inter-direction of the second direction in which the number of 241) increases.
- 20 is a diagram for describing a metasurface according to an exemplary embodiment.
- the metasurface 240 may include a plurality of nanopillars 241 having different heights H of the nanopillars 241.
- the plurality of nanopillars 241 may form a nanopattern based on a change in the height H of the nanopillars 241.
- the heights H1, H2, and H3 of the plurality of nanopillars 241 may increase in one direction.
- the laser beam emitted from the laser output unit 100 may be steered in a direction in which the height H of the nanopillars 241 increases.
- the meta surface 240 has a first nanopillar 243 having a first height H1, a second nanopillar 245 having a second height H2, and a third height H3.
- a third nanopillar 247 may be included.
- the third height H3 may be greater than the first height H1 and the second height H2.
- the second height H2 may be greater than the first height H1. That is, the height H of the nanopillars 241 may increase from the first nanopillar 243 toward the third nanopillar 247.
- the laser beam is a first direction emitted from the laser output unit 100 and a third from the first nanopillar 243 It may be steered in a direction between the second direction, which is a direction toward the nanopillars 247.
- the steering angle ⁇ of the laser beam may vary according to the height H of the nanopillars 241.
- the steering angle ⁇ of the laser beam may vary according to an increase/decrease rate of the height H of the nanopillars 241.
- the increase/decrease rate of the height (H) of the nano-pillars 241 may mean a numerical value representing an average degree of change in the height (H) of the adjacent nano-pillars 241.
- the increase/decrease rate of the height (H) of the nanopillar 241 will be calculated. I can.
- the difference between the first height H1 and the second height H2 may be different from the difference between the second height H3 and the third height H3.
- the steering angle ⁇ of the laser beam may increase as the increase/decrease rate of the height H of the nanopillar 241 increases.
- the nanopillars 241 may form a first pattern having a first increase/decrease rate based on the height H.
- the nanopillars 241 may form a second pattern having a second increase/decrease rate based on the height H.
- the first steering angle according to the first pattern may be larger than the second steering angle according to the second pattern.
- the lidar device may include an optical unit that directs a laser beam emitted from a laser output unit to an object.
- the optical unit may include a beam collimation and steering component (BCSC) for collimating and steering a laser beam emitted from the laser output unit.
- BCSC beam collimation and steering component
- the BCSC may be composed of one component or may be composed of a plurality of components.
- 21 is a diagram for describing an optical unit according to an exemplary embodiment.
- the optical unit may include a plurality of components.
- it may include a collimation component 210 and a steering component 230.
- the collimation component 210 may perform a role of collimating the beam emitted from the laser output unit 100, and the steering component 230 may perform a collimation of the collimation component 210. It can play a role of steering the formed beam. As a result, the laser beam emitted from the optic may be directed in a predetermined direction.
- the collimation component 210 may be a micro lens or a meta surface.
- a micro lens array may be disposed on one side of the substrate, or a micro lens array may be disposed on both sides of the substrate.
- the laser beam may be collimated by a nano pattern formed by a plurality of nano pillars included in the meta surface.
- the steering component 230 may be a micro lens, a micro prism, or a meta surface.
- a micro lens array may be disposed on one side of the substrate, or a micro lens array may be disposed on both sides of the substrate.
- the steering component 230 When the steering component 230 is a micro prism, it can be steered by the angle of the micro prism.
- the laser beam may be steered by a nano pattern formed by a plurality of nano pillars included in the meta surface.
- 22 is a diagram for describing an optical unit according to an exemplary embodiment.
- the optical unit may include one single component.
- it may include a meta component 270.
- the meta component 270 may collimate or steer a laser beam emitted from the laser output unit 100.
- the meta component 270 includes a plurality of meta-surfaces, collimating a laser beam emitted from the laser output unit 100 in one meta-surface, and collimating a laser beam in the other meta-surface. Can be steered. It will be described in detail in FIG. 23 below.
- the meta component 270 may collimate and steer a laser beam emitted from the laser output unit 100 including one meta surface. It will be described in detail in FIG. 24 below.
- FIG. 23 is a diagram for describing a meta component according to an embodiment.
- the meta component 270 may include a plurality of meta surfaces 271 and 273.
- it may include a first meta surface 271 and a second meta surface 273.
- the first meta surface 271 may be disposed in a direction in which the laser beam is emitted from the laser output unit 100.
- the first metasurface 271 may include a plurality of nanopillars.
- the first metasurface may form a nanopattern by a plurality of nanopillars.
- the first meta-surface 271 may collimate the laser beam emitted from the laser output unit 100 by the formed nanopatterns.
- the second meta-surface 273 may be disposed in a direction in which the laser beam is output from the first meta-surface 271.
- the second metasurface 273 may include a plurality of nanopillars.
- the second meta-surface 273 may form a nano pattern by a plurality of nano-pillars.
- the second meta-surface 273 may steer the laser beam emitted from the laser output unit 100 by the formed nanopatterns. For example, as shown in FIG. 23, the laser beam may be steered in a specific direction by the increase/decrease rate of the width W of the plurality of nanopillars. In addition, the laser beam may be steered in a specific direction by the distance P, the height H, and the number per unit length of the plurality of nanopillars.
- 24 is a diagram for describing a meta component according to another embodiment.
- the meta component 270 may include one meta surface 274.
- the meta surface 275 may include a plurality of nanopillars on both sides.
- the meta-surface 275 may include a first nano-pillar set 276 on a first surface and a second nano-pillar set 278 on a second surface.
- the meta-surface 275 may be steered after collimating the laser beam emitted from the laser output unit 100 by a plurality of nano-pillars forming respective nano patterns on both sides.
- the first set of nanopillars 276 disposed on one side of the metasurface 275 may form a nanopattern.
- the laser beam emitted from the laser output unit 100 may be collimated by the nano pattern formed by the first nano-pillar set 276.
- the second nano-pillar set 278 disposed on the other side of the meta-surface 275 may form a nano pattern.
- the laser beam passing through the first nanopillar 276 may be steered in a specific direction by the nanopattern formed by the second nanopillar set 278.
- 25 is a diagram illustrating a big cell module according to an embodiment.
- a big cell module 2100 may include a body 2101, a first surface 2102, and a laser output unit 2130.
- the laser output unit 2130 may include a first big cell array 2110 and a second big cell array 2120.
- 25 illustrates a big cell module in which the first big cell array 2110 and the second big cell array 2120 are arranged vertically, but is not limited thereto.
- the laser output unit 2130 may include only one of the first big cell array 2110 and the second big cell array 2120, or the first big cell array 2110 in the laser output unit 2130.
- the second big cell array 2120 may be disposed left and right, and the laser output unit 2130 may include an additional big cell array together with the first big cell array 2110 and the second big cell array 2120.
- the big cell module 2100 may include a laser output unit 2130, a laser light receiving unit, and a controller. In addition, the big cell module 2100 may include a plurality of optics.
- the big cell module 2100 may have a plurality of surfaces.
- the big cell module 2100 may have a shape such as a polygonal column, a cylinder, a polygonal cone, or a cone, but is not limited thereto.
- the big cell module 2100 may be a synthetic resin, a metal, or a combination thereof.
- a laser output unit 2130 may be disposed on one surface of the big cell module 2100.
- the laser output unit 2130 may be one, but may be plural.
- the first laser output unit included in the laser output unit 2130 may be disposed on the same surface as the second laser output unit, or may be disposed on a different surface.
- a laser output unit 2130 may be disposed outside the big cell module 2100 on one surface of the big cell module 2100, but may be disposed inside the big cell module 2100.
- the big cell module 2100 may be transparent.
- a surface on which the laser output unit 2130 is disposed may be transparent.
- the big cell module 2100 may irradiate a laser beam toward the inside of the big cell module 2100.
- the laser beam may be made of a transparent material so as to pass through the big cell module 2100.
- the big cell module 2100 when the laser output unit 2130 is disposed inside the big cell module 2100, the big cell module 2100 irradiates a laser beam toward the outside of the big cell module 2100.
- the big cell module 2100 may be made of a transparent material so that the laser beam passes through the big cell module 2100.
- a laser light receiving unit may be disposed on one surface of the big cell module 2100.
- the laser light receiving unit may be one, but may be plural.
- the first laser light receiving unit included in the laser light receiving unit may be disposed on the same surface as the second laser light receiving unit, or may be disposed on a different surface.
- a surface on which the laser output unit 2130 is disposed and a surface on which the laser light receiving unit is disposed may be the same, but may be different.
- a controller may be disposed on one side of the big cell module 2100.
- the surface on which the controller is disposed may be the same as the surface on which the laser output unit or the laser light receiving unit is disposed, but may be different.
- the big cell module 2100 may accommodate a controller therein.
- a controller may be disposed outside the big cell module 2100.
- the big cell module 2100 may output a laser beam from the laser output unit 2130 by a controller.
- the big cell module 2100 may output a laser beam toward the object by the laser output unit 2130.
- the big cell module 2100 may acquire a point of time when the laser beam is emitted.
- the big cell module 2100 may acquire the timing of the laser beam exiting through the controller.
- the big cell module 2100 irradiates a laser beam onto an object.
- the laser beam irradiated by the big cell module 2100 forms a constant field of view (FOV).
- the FOV may include a horizontal FOV (horizontal FOV) or a vertical FOV (vertical FOV).
- the horizontal FOV may follow the horizontal axis of the module.
- the vertical FOV may follow the vertical axis of the module.
- the FOV of the big cell module 2100 may be determined by the laser output unit 2130.
- the horizontal FOV of the big cell module 2100 may be the horizontal FOV of the laser output unit 2130 or may be equal to or smaller than the sum of the horizontal FOVs of the plurality of laser output units, but is not limited thereto.
- the vertical FOV of the big cell module 2100 may be the vertical FOV of the laser output unit 2130, or may be equal to or smaller than the sum of the vertical FOVs of the plurality of laser output units, but is not limited thereto.
- the horizontal FOV of the big cell module 2100 may be defined based on a steering angle of the first big cell array 2110, a steering angle of the second big cell array 2120, and divergence of a radar beam.
- the horizontal FOV of the laser output unit 2130 or the big cell module 2100 may be 60 degrees or less than 60 degrees, but is not limited thereto.
- the vertical FOV of the laser output unit 2130 or the big cell module 2100 may be 30 degrees, but is not limited thereto.
- the big cell module 2100 may receive a laser beam reflected from an object.
- the big cell module 2100 may receive a laser beam reflected from an object by a laser light receiving unit.
- the big cell module 2100 may acquire a time point of receiving the laser beam.
- the big cell module 2100 may acquire the time point of receiving the laser beam by the controller.
- the controller may obtain a time point of receiving the laser beam by the light receiving unit.
- the controller may acquire the time point of receiving the laser beam by the SPAD array, but is not limited thereto.
- the controller may acquire the time point of receiving the laser beam by using the histogram calculated by the SPAD array, but is not limited thereto.
- the big cell module 2100 has a first surface 2102 on which the laser output unit 2130 is disposed.
- the first surface may be disposed in a direction toward the object.
- one laser output unit 2130 may be disposed on the first surface, but a plurality of laser output units 2130 may be disposed.
- the laser light receiving unit may be disposed on the first surface, but is not limited thereto.
- the first surface may be a flat surface, but may be a curved surface or a single layer.
- the laser output unit 2130 may be disposed on one surface of the big cell module 2100.
- the big cell module 2100 may be disposed on one surface facing the object.
- it may be disposed on the first surface 2102 of the big cell module 2100.
- the laser output unit 2130 may include a VCSEL (Vertical Cavity Surface Emitting Laser).
- the big cell may be disposed on the first surface 2102 of the big cell module 2100 to output a laser beam perpendicular to the first surface 2102.
- the laser output unit 2130 may include a plurality of big cell emitters.
- the laser output unit 2130 may include a plurality of big cell units including a plurality of big cell emitters.
- the laser output unit 2130 may include a plurality of big cell arrays including a plurality of big cell units.
- the laser output unit 2130 may output a laser beam toward an object.
- the laser output unit 2130 may output a laser beam toward the object by the controller.
- the laser output unit 2130 may include a first big cell array 2110 and a second big cell array 2120.
- first big cell array 2110 and the second big cell array 2120 may be spaced apart or disposed adjacent to each other.
- first big cell array 2110 and the second big cell array 2120 may be disposed to be spaced apart from or adjacent to the first side 2102 of the big cell module 2100.
- the laser output unit 2130 irradiates a laser beam onto an object.
- the laser beam irradiated by the laser output unit 2130 forms a constant field of view (FOV).
- the FOV may include a horizontal FOV (horizontal FOV) or a vertical FOV (vertical FOV).
- the FOV of the laser output unit 2130 may be determined by the first big cell array 2110 and the second big cell array 2120.
- the horizontal FOV of the laser output unit 2130 may be equal to or smaller than the sum of the horizontal FOVs of the first big cell array 2110 and the second big cell array 2120, but is not limited thereto.
- the vertical FOV of the laser output unit 2130 may be equal to or smaller than the sum of the vertical FOVs of the first big cell array 2110 and the second big cell array 2120, but is not limited thereto.
- the horizontal FOV of the big cell module 2100 may be defined based on a steering angle of the first big cell array 2110, a steering angle of the second big cell array 2120, and divergence of a radar beam.
- the first big cell array 2110 may be disposed on the big cell module 2100.
- the first big cell array 2110 may be disposed on the first surface 2102 of the big cell module 2100.
- the first big cell array 2110 may be a big cell array including a plurality of big cell units, but may also be a big cell unit.
- the first big cell array 2110 forms a constant FOV.
- the first big cell array 2110 forms a horizontal FOV and a vertical FOV.
- the second big cell array 2120 may be disposed on the big cell module 2100.
- the second big cell array 2120 may be disposed on the second surface 2102 of the big cell module 2100.
- the second big cell array 2120 may be a big cell array including a plurality of big cell units, but may also be a big cell unit.
- the second big cell array 2120 forms a constant FOV.
- the second big cell array 2120 forms a horizontal FOV and a vertical FOV.
- the first big cell array 2110 and the second big cell array 2120 may be the same or different.
- the first big cell array 2110 and the second big cell array 2120 may have the same number of big cell units or the same number of big cell emitters, but are not limited thereto.
- the first big cell array 2110 and the second big cell array 2120 may have the same FOV or an angle of the irradiation range, but the present invention is not limited thereto.
- the first big cell array 2110 and the second big cell array 2120 may have the same size or material, but are not limited thereto.
- the second big cell array 2120 may be the first big cell array 2110 rotated 180 degrees, but is not limited thereto.
- the FOV angles of the first big cell array 2110 and the second big cell array 2120 may be the same or different.
- the horizontal FOV of the first big cell array 2110 may be the same as the horizontal FOV of the second big cell array 2120.
- the vertical FOV of the first big cell array 2110 may be the same as the vertical FOV of the second big cell array 2120.
- the horizontal FOV of the first big cell array 2110 and the horizontal FOV of the second big cell array 2120 have the same angle, but the irradiation range may be different.
- the horizontal FOV irradiation range of the first big cell array 2110 is -N° to 0°
- the horizontal FOV irradiation range of the second big cell array 2120 may be 0° to N°, but is not limited thereto.
- the horizontal FOV of the first big cell array 2110 and the horizontal FOV of the second big cell array 2120 may partially overlap.
- the horizontal FOV irradiation range of the first big cell array 2110 may be -N° to M°
- the horizontal FOV irradiation range of the second big cell array 2120 may be -M° to N°, but limited thereto. It doesn't work.
- the first big cell array 2110 and the second big cell array 2120 may be disposed to be spaced apart or adjacent to each other.
- 26 is a diagram illustrating a laser output unit according to an exemplary embodiment.
- the laser output unit 2150 may include a laser output device 2151, a plurality of optics, for example, a first optic 2152 and a second optic 2153. .
- the laser output unit 2130 may change a flight path of a laser beam output from a laser output element by an optic.
- the optics are, for example, OPA (Optical Phased Array), lens, microlens, microlens array, prism, microprism, microprism array ) And metasurfa.
- OPA Optical Phased Array
- the optic may collimate a laser beam output from a laser output device.
- the optic may steer the laser beam output from the laser output device in one direction.
- the optic may collimate the laser beam output from the laser output device and then steer it in one direction.
- the laser output device 2151 may be one of a big cell emitter, a big cell unit, and a big cell array.
- the laser output device may be disposed on the first surface 2102 of the body 2101 of the big cell module 2100.
- the first optic 2152 may collimate a laser beam. Also, the second optic 2153 may steer the laser beam.
- the first optic 2152 may be disposed in a direction in which a laser beam is output from the laser output device 2151.
- the second optic 2153 may be disposed in a direction in which the laser beam is output from the first optic 2152, but is not limited thereto.
- the laser output device 2151, the first optic 2152, and the second optic 2153 may be disposed adjacent to each other or may be disposed spaced apart from each other.
- the functions of the first optic 2152 and the second optic 2153 may be implemented by another optic, but are not limited thereto.
- the big cell module 2100 may include a body 2101, a first surface 2102, and a laser output unit 2130.
- the laser output unit 2130 may include a first big cell array 2110 and a second big cell array 2120.
- the first big cell array 2110 may form a first horizontal FOV 2111.
- the second big cell array 2120 may form a second horizontal FOV 2121.
- the laser beam is illustrated as being irradiated at one point, but this is a diagram for convenience in explaining the horizontal FOV.
- the present invention is not limited thereto, and the laser beam may be irradiated at multiple points without being output at one point with respect to the big cell arrays 2110 and 2120.
- the first horizontal FOV 2111 and the second horizontal FOV 2121 may overlap, but are not limited thereto.
- the first big cell array 2110 may form a first horizontal FOV 2111.
- the second big cell array 2120 may form a second horizontal FOV 2121.
- the laser beam is illustrated as being irradiated at one point, but this is a diagram for convenience in explaining the horizontal FOV.
- the present invention is not limited thereto, and the laser beam may be irradiated at multiple points without being output at one point with respect to the big cell arrays 2110 and 2120.
- the horizontal axis of the first side 2102 of the big cell module 2100 may be defined as a first axis (a1), and the vertical axis of the first side 2102 of the big cell module 2100 is defined as a second axis (a2) Can be.
- the first axis a1 and the second axis a2 may be orthogonal.
- the first horizontal FOV 2111 and the second horizontal FOV 2121 may be symmetrical with respect to the second axis a2, but are not limited thereto.
- the first horizontal FOV 2111 and the second horizontal FOV 2121 may be symmetrical with respect to a plane perpendicular to the first surface 2102 of the big cell module 2100, but are not limited thereto.
- the second big cell array 2120 may be the first big cell array 2110 rotated 180 degrees.
- the manufacturing process after manufacturing a plurality of the same big cell array, when placing it in the big cell module 2100, one of the same big cell arrays is placed, and the other one of the same big cell arrays is based on the placed big cell array. It can be rotated 180 degrees and then placed on the Big Cell module.
- the 2N degree may not be satisfied by the optics included in the laser output unit.
- the horizontal FOV of the desired big cell module is 60 degrees
- micro prism which is an example of the optics included in the laser output unit
- micro prisms having various angles must be included in order to create a steering angle of 60 degrees.
- the angle of the micro prism may be less than a certain angle, for example, the steering efficiency may be drastically reduced.
- the angle of the micro prism is 0.25 degrees or less, it may be difficult to implement and a decrease in steering efficiency may occur, but is not limited thereto.
- a plurality of big cell arrays can be used.
- the horizontal FOV of a desired big cell module is 2N degrees
- a plurality of big cell arrays having a horizontal FOV of N degrees can be used.
- the laser output unit may include two big cell arrays having a horizontal FOV of 30 degrees.
- one of the plurality of big cell arrays covers the FOV of -30 degrees to 0 degrees
- the other of the plurality of big cell arrays covers the FOV of 0 degrees to +30 degrees
- the horizontal FOV of the laser output part is formed at 60 degrees.
- the horizontal FOV of the laser output unit may be the horizontal FOV of the big cell module, as a result, the horizontal FOV of the big cell module can be formed at 60 degrees.
- the first big cell array 2110 may form a first vertical FOV 2112.
- the second big cell array 2120 may form a second vertical FOV 2122.
- FIG. 29 it is illustrated as if the laser beam is irradiated at one point, but this is a diagram for convenience in explaining the horizontal FOV.
- the present invention is not limited thereto, and the laser beam may be irradiated at multiple points without being output at one point with respect to the big cell arrays 2110 and 2120.
- the first big cell array 2110 and the second big cell array 2120 may form vertical FOVs 2112 and 2122 along the vertical axis of the first surface 2102.
- the vertical FOVs 2112 and 2122 of the first big cell array 2110 and the second big cell array 2120 may be formed by a plurality of optics included in the laser output unit, or formed by one optic. It may be, but is not limited thereto.
- the first vertical FOV 2112 and the second vertical FOV 2122 may have the same irradiation angle.
- the first vertical FOV 2112 and the second vertical FOV 2122 may have an irradiation angle of 30 degrees, but are not limited thereto.
- first vertical FOV 2112 and the second vertical FOV 2122 may overlap, but are not limited thereto.
- the vertical FOV of the laser output unit may be equal to or less than the sum of the vertical FOVs of the first big cell array 2110 and the second big cell array 2120.
- the vertical FOV of the big cell module 2100 may be equal to or less than the sum of the vertical FOVs of the first big cell array 2110 and the second big cell array 2120.
- the vertical FOV of the big cell module 2100 may be defined based on a steering angle of the first big cell array 2110, a steering angle of the second big cell array 2120, and divergence of a radar beam.
- 30 to 31 are views viewed from above of a horizontal FOV of a big cell module according to an embodiment.
- the first big cell array 2110 and the second big cell array 2120 form a horizontal FOV based on the first axis a1.
- the first big cell array 2110 forms a first horizontal FOV 2111 based on the first axis a1.
- the second big cell array 2120 forms a second horizontal FOV 2121 based on the first axis a1.
- the first horizontal FOV 2111 and the second horizontal FOV 2121 may overlap, but are not limited thereto.
- the first horizontal FOV 2111 may include outermost laser beams 2113, 2114, 2123, and 2124.
- the outermost laser beam may refer to a laser beam having a maximum irradiation angle and a laser beam having a minimum irradiation angle, but is not limited thereto.
- the position value of the laser beam may be determined based on the first axis a1 with respect to a virtual plane spaced apart from the big cell array. For example, among the laser beams, the position value of the laser beam 2114 is greater than the position value of the laser beam 2113 with respect to the virtual plane spaced apart from the (2113, 2114) bixel array. It can be big.
- the first horizontal FOV 2111 may include a first laser beam 2114 which is a laser beam having a large position value with respect to the first axis a1 among the outermost laser beams.
- the second horizontal FOV 2121 may include a second laser beam 2123, which is a laser beam having a small position value with respect to the first axis a1 among the outermost laser beams.
- the traveling directions of the first laser beam 2114 and the second laser beam 2123 may be the same.
- the traveling directions of the first laser beam 2113 and the second laser beam 2123 may be a direction perpendicular to the first axis a1.
- the traveling directions of the first and second laser beams 2113 and 2123 may be perpendicular to the first surface 2102.
- 32 to 34 are views as viewed from the front of the horizontal FOV of the big cell module according to an embodiment.
- the first big cell array 2110 and the second big cell array 2120 form a horizontal FOV based on the first axis a1.
- the first big cell array 2110 forms a first horizontal FOV 2111 based on the first axis a1.
- the second big cell array 2120 forms a second horizontal FOV 2121 based on the first axis a1.
- the first horizontal FOV 2111 and the second horizontal FOV 2121 may overlap, but are not limited thereto.
- the first horizontal FOV 2111 may include a first area 2131 and a second area 2117.
- the first area 2131 may be an area overlapping the second horizontal FOV 2121.
- the second area 2117 may be an area that does not overlap with the second horizontal FOV 2121.
- the second horizontal FOV 2121 may include a first area 2131 and a third area 2127.
- the first area 2131 may be an area overlapping the first horizontal FOV 2121.
- the third area 2127 may be an area that does not overlap with the first horizontal FOV 2121.
- the first horizontal FOV 2111 is a laser beam 2116 output in a direction perpendicular to the first surface 2102 and a laser beam output in a direction other than perpendicular to the first surface 2102 ( 2115).
- the laser beam 2116 output in a direction perpendicular to the first surface 2102 and the laser beam 2115 output in a direction other than perpendicular to the first surface 2102 are Can be output by optics. That is, the direction of the laser beam may be determined by the arrangement or optics of the big cell emitter.
- a laser beam 2116 output in a direction perpendicular to the first surface 2102 is shown by a single arrow, but the present invention is not limited thereto, and a plurality of laser beams are perpendicular to the first surface 2102. It can be output in the direction.
- the second horizontal FOV 2121 is generated by a laser beam 2126 output in a direction perpendicular to the first surface 2102 and a laser beam 2125 output in a direction not perpendicular to the first surface 2102. Can be formed.
- the first area 2131 may be an area where the first horizontal FOV 2111 and the second horizontal FOV 2121 overlap.
- the first area 2131 may be formed by laser beams output in various directions to form a horizontal FOV.
- the first area 2131 may be an area formed by the laser beam 2116 output in a direction perpendicular to the first surface 2102 among the laser beams forming the first horizontal FOV 2111. . Also, the first area 2131 may be an area formed by the laser beam 2115 output in a direction other than perpendicular to the first surface 2102 among the laser beams forming the first horizontal FOV 2111.
- the first area 2131 may be an area formed by the laser beam 2126 output in a direction perpendicular to the first surface 2102 among the laser beams forming the second horizontal FOV 2121. have. Also, the first area 2131 may be an area formed by the laser beam 2125 output in a direction other than perpendicular to the first surface 2102 among the laser beams forming the second horizontal FOV 2121.
- 35 is a diagram illustrating a lidar device according to an embodiment.
- a lidar device 2001 may include a plurality of big cell modules 2100.
- a plurality of big cell modules 2100 may be arranged adjacent to each other, or may be spaced apart from each other.
- the adjacent big cell modules 2100 may share one surface with each other.
- the lidar device 2001 may be arranged so that the first surface 2102 on which the laser output unit 2130 of the adjacent big cell modules 2100 is disposed forms an angle or a curved surface. Alternatively, it may be arranged so as not to form an angle or to form a straight line.
- the horizontal FOV of the lidar device 2001 or the big cell module according to an embodiment is N°
- M/N big cell modules are included to satisfy the horizontal FOV of the entire lidar device desired by the user, M°. can do.
- the horizontal FOV of the big cell module when the horizontal FOV of the big cell module is 60°, three big cell modules may be included to satisfy 180°, which is the horizontal FOV of the entire lidar device desired by the user.
- the horizontal FOV of 60 degrees of the big cell module may be formed by a plurality of big cell arrays.
- a horizontal FOV of 60 degrees of a big cell module may be formed by two big cell arrays having a horizontal FOV of 30 degrees.
- the lidar device may include three big cell modules having a horizontal FOV of 60 degrees including two big cell arrays having a horizontal FOV of 30 degrees.
- 36 to 39 are diagrams illustrating a big cell module according to another embodiment.
- the big cell module 2200 may include a body 2201, a first surface 2202, and a laser output unit 2230.
- the laser output unit 2230 may include a first big cell array 2210 and a second big cell array 2220.
- FIG. 36 illustrates a big cell module in which the first big cell array 2210 and the second big cell array 2220 are arranged left and right, but is not limited thereto.
- first surface 2202 may overlap with the description of the first surface 2102 described above, a detailed description will be omitted.
- the description of the laser output unit 2230 may be duplicated with the description of the laser output unit 2130 described above, and a detailed description thereof will be omitted.
- the description of the first big cell array 2210 may overlap with the description of the first big cell array 2110 described above, a detailed description will be omitted.
- the laser output unit 2230 of the big cell module 2200 may include a first big cell array 2210 and a second big cell array 2220.
- the first big cell array 2210 may include a first big cell unit that outputs a laser beam in a first direction.
- the first big cell array 2210 may include a second big cell unit that outputs a laser beam in a second direction.
- first direction and the second direction may be the same, but may be different.
- difference between the first direction and the second direction may be 0.104 degrees, but is not limited thereto.
- the second big cell array 2220 may include a third big cell unit that outputs a laser beam in a third direction.
- the third direction may be the same as the first direction, but may be different.
- the first direction and the third direction may be directions perpendicular to the first surface 2202 of the big cell module 2200, but are not limited thereto.
- the first big cell unit and the second big cell unit may not be spaced apart from each other, but may be disposed at a first distance. Also, the first big cell unit and the second big cell unit may be adjacent big cell units. For example, the first big cell unit and the second big cell unit may be disposed adjacent to each other with a first interval. Also, for example, the first big cell unit and the second big cell unit may be disposed adjacent to each other with a first interval.
- first big cell unit and the third big cell unit may not be spaced apart, but may be spaced apart. In this case, the distance between the first and third big cells units may be less than or equal to the first distance between the first and second big cells units.
- first big cell unit and the third big cell unit may be adjacent big cell units. For example, the first big cell unit and the third big cell unit may be disposed adjacent to each other with an interval less than or equal to the first interval. Also, for example, the first big cell unit and the third big cell unit may be disposed adjacent to each other with an interval less than or equal to the first interval.
- the first big cell unit may be an outermost big cell unit of the first big cell array.
- the first big cell unit may be a big cell unit disposed at the right edge of the first big cell array, but is not limited thereto.
- the third big cell unit may be an outermost big cell unit of the second big cell array.
- the third big cell unit may be a big cell unit disposed at the left edge of the second big cell array, but is not limited thereto.
- an interval between the first big cell unit and the third big cell unit may be less than or equal to the first interval.
- a dead zone in which a laser beam is not irradiated may be formed between the first and second big cell arrays.
- an interval between the first big cell unit and the third big cell unit may be adjusted.
- the distance between the first big cell unit and the third big cell unit may be defined based on the steering angle of the first big cell unit, the steering angle of the third big cell unit, and the divergence angle of the laser beam.
- the distance between the first big cell unit and the third big cell unit may be the first distance. It is not limited to this.
- the first big cell array 2210 may form a first horizontal FOV 2211.
- the second big cell array 2220 may form a second horizontal FOV 2221.
- the first horizontal FOV 2211 and the second horizontal FOV 2221 may overlap, but are not limited thereto.
- the first big cell array 2210 may form a first horizontal FOV 2211.
- the second big cell array 2220 may form a second horizontal FOV 2221.
- the first surface 2202 of the big cell module 2200 may be horizontal with respect to the first axis a1 and vertical with respect to the second axis a2.
- the first axis a1 and the second axis a2 may be orthogonal.
- the first horizontal FOV 2211 and the second horizontal FOV 2221 may be symmetrical with respect to the second axis a2, but are not limited thereto.
- the first horizontal FOV 2211 and the second horizontal FOV 2221 may be symmetrical with respect to a plane perpendicular to the first surface 2202 of the big cell module 2200, but are not limited thereto.
- the second big cell array 2220 may be the first big cell array 2210 rotated 180 degrees.
- the manufacturing process after manufacturing a plurality of the same big cell array, when placing it in the big cell module 2200, one of the same big cell arrays is placed, and the other one of the same big cell arrays is based on the placed big cell array. It can be rotated 180 degrees and then placed on the Big Cell module.
- the 2N degree may not be satisfied by the optics included in the laser output unit.
- the horizontal FOV of the desired big cell module is 60 degrees
- micro prism which is an example of the optics included in the laser output unit
- micro prisms having various angles must be included in order to create a steering angle of 60 degrees.
- the angle of the micro prism may be less than a certain angle, for example, the steering efficiency may be drastically reduced.
- the angle of the micro prism is 0.25 degrees or less, it may be difficult to implement and a decrease in steering efficiency may occur, but is not limited thereto.
- a plurality of big cell arrays can be used.
- the horizontal FOV of a desired big cell module is 2N degrees
- a plurality of big cell arrays having a horizontal FOV of N degrees can be used.
- the laser output unit may include two big cell arrays having a horizontal FOV of 30 degrees.
- one of the plurality of big cell arrays covers the FOV of -30 degrees to 0 degrees
- the other of the plurality of big cell arrays covers the FOV of 0 degrees to +30 degrees
- the horizontal FOV of the laser output part is formed at 60 degrees.
- the horizontal FOV of the laser output unit may be the horizontal FOV of the big cell module, as a result, the horizontal FOV of the big cell module can be formed at 60 degrees.
- the first big cell array 2210 may form a first vertical FOV 2212.
- the second big cell array 2220 may form a second vertical FOV 2222.
- the first vertical FOV 2212 and the second vertical FOV 2222 may have the same irradiation angle.
- the first vertical FOV 2112 and the second vertical FOV 2122 may have an irradiation angle of 30 degrees, but are not limited thereto.
- first vertical FOV 2112 and the second vertical FOV 2122 may overlap, but are not limited thereto.
- the description of the horizontal FOV of the big cell module 2200 shown in FIGS. 36 to 39 may be common with the description of the horizontal FOV of the big cell module 2100 described through FIGS. 30 to 34 above.
- FIG. 40 is a diagram illustrating a LiDAR device according to another exemplary embodiment.
- a lidar device 2002 may include a plurality of big cell modules 2200.
- a plurality of big cell modules 2200 may be disposed adjacent to each other or may be spaced apart from each other.
- the adjacent big cell modules 2200 may share one surface with each other.
- the lidar device 2002 may be arranged such that the first surface 2202 on which the laser output units 2230 of adjacent big cell modules 2200 are disposed forms an angle or a curved surface. Alternatively, it may be arranged so as not to form an angle or to form a straight line.
- the horizontal FOV of the lidar device 2002 and the big cell module 2200 is N°
- M/N big cells are used to satisfy the horizontal FOV of the entire lidar device desired by the user, M°.
- a module 2200 may be included.
- the horizontal FOV of the big cell module 2200 when the horizontal FOV of the big cell module 2200 is 60°, three big cell modules 2200 may be included to satisfy 180°, which is the horizontal FOV of the entire lidar device desired by the user.
- the horizontal FOV of 60 degrees of the big cell module may be formed by a plurality of big cell arrays.
- a horizontal FOV of 60 degrees of a big cell module may be formed by two big cell arrays having a horizontal FOV of 30 degrees.
- the lidar device may include three big cell modules having a horizontal FOV of 60 degrees including two big cell arrays having a horizontal FOV of 30 degrees.
- the lidar device may include a plurality of big cell modules.
- the lidar device may output a laser beam to an object through a plurality of big cell modules.
- the lidar device may receive a laser beam reflected from an object through a plurality of big cell modules.
- the lidar device may form a FOV through a plurality of big cell modules.
- reference points for measuring a distance from the lidar device to an object may vary.
- each reference point may exist for each of a plurality of big cell modules, and positions of each of the reference points may all be different.
- the calculated distance may vary according to the location of the big cell module even if the distance is the same.
- a fixed reference point that is a reference for calculating the distance may be determined, and the distance may be calculated based on the reference point.
- the big cell module of the lidar device may include a plurality of big cell arrays.
- the big cell module may output a laser beam to an object through a plurality of big cell arrays.
- the big cell module may receive a laser beam from which a laser beam output from a plurality of big cell arrays is reflected from an object.
- the big cell module may form a FOV through a plurality of big cell arrays.
- a reference point for measuring a distance from the lidar device to an object may be varied.
- each reference point may exist for each of a plurality of big cell arrays, and positions of each of the reference points may all be different.
- the reference points vary, in determining the distance from the lidar device to the object, the calculated distance may vary according to the location of the big cell array even if the same distance is used.
- each reference point may exist for each of a plurality of big cell arrays, and the positions of each of the reference points are all different, may also apply to a plurality of big cell units.
- Each reference point may exist for each of the plurality of big cell units, and positions of each of the reference points may all be different.
- the calculated distance may vary according to the location of the big cell unit even if the distance is the same.
- a fixed reference point that is a reference for calculating the distance may be determined, and the distance may be calculated based on the reference point.
- the distance may be calculated based on the reference point by determining a fixed reference point that is a reference for calculating the distance.
- 41 to 42 are diagrams illustrating a laser output unit according to an exemplary embodiment.
- the laser output unit 2900 may include a plurality of big cell arrays.
- it may include a first big cell array and a second big cell array.
- the first big cell array may include a plurality of big cell units.
- the first big cell array may include a first big cell unit 2901 and a second big cell unit 2902.
- the second big cell array may include a plurality of big cell units.
- the second big cell array may include a third big cell unit 2903 and a fourth big cell unit 2904.
- the first big cell array and the second big cell array may be placed on the same substrate.
- the first big cell array and the second big cell array may be raised on the same PCB.
- the first big cell array and the second big cell array may be the same.
- the second big cell array may be obtained by rotating the first big cell array by 180 degrees.
- the first big cell unit 2901 may output a laser beam in a first direction. Also, the first big cell unit 2901 may output a laser beam having a divergence angle of the first angle.
- the second big cell unit 2902 may output a laser beam in a second direction. Also, the first big cell unit 2901 may output a laser beam having a divergence angle of a second angle.
- the third big cell unit 2903 may output a laser beam in a third direction.
- the third big cell unit 2903 may output a laser beam having a divergence angle of a third angle.
- the fourth big cell unit 2904 may output a laser beam in a fourth direction. Also, the fourth big cell unit 2904 may output a laser beam having a divergence angle of a fourth angle.
- a center of a laser beam output from each big cell unit may be indicated by a solid line, and a divergence beam may be indicated by a dotted line.
- the angle formed by the center of the laser beam output from the first big cell unit 2901 and the center of the laser beam output from the second big cell unit 2902 is less than the sum of half of the first angle and half of the second angle. I can. Alternatively, the angle formed by the center of the laser beam output from the first big cell unit 2901 and the center of the laser beam output from the second big cell unit 2902 may be less than half of the sum of the first angle and the second angle. have.
- the A dead zone may occur between the laser beam output from the first big cell unit 2901 and the laser beam output from the second big cell unit 2902, which is an area to which the laser beam is not irradiated.
- the laser beam output from the first big cell unit 2901 and the laser beam output from the second big cell unit 2902 may come into contact with each other, or at least some of them may overlap.
- the first big cell unit 2901 may output a collimation beam in a first direction and a divergence beam in a second direction and a third direction.
- the second big cell unit 2902 may output a collimation beam in a fourth direction, and may output a divergence beam in the third and fifth directions.
- the third big cell unit 2903 may output a collimation beam in a sixth direction, and may output a divergence beam in the second and seventh directions.
- the divergence beam of the first big cell unit 2901 and the divergence beam of the third big cell unit 2903 may be output in the same direction.
- the divergence beam of the first big cell unit 2901 and the divergence beam of the third big cell unit 2903 may be output in a direction perpendicular to the surface on which the laser output unit is disposed.
- the laser output unit 2950 may include a plurality of big cell arrays.
- it may include a first big cell array and a second big cell array.
- the laser output unit 2950 may include an optic for steering a laser beam output from a big cell array.
- the first big cell array may include a plurality of big cell units.
- the first big cell array may include a first big cell unit 2951 and a second big cell unit 2952.
- the second big cell array may include a plurality of big cell units.
- the second big cell array may include a third big cell unit 2953 and a fourth big cell unit 2954.
- the optic may include a plurality of sub optics.
- a first sub-optic 2961 for steering a laser beam output from the first big cell unit 2951 may be included.
- a second sub-optic 2962 for steering a laser beam output from the second big cell unit 2952 may be included.
- it may include a third sub-optic (2963) for steering the laser beam output from the third big cell unit (2953).
- a fourth sub-optic 2964 for steering the laser beam output from the fourth big cell unit 2954.
- the first sub-optic 2961 may output a laser beam in a first direction.
- the first sub-optic 2961 may output a laser beam having a divergence angle of the first angle.
- the second sub-optic 2962 may output a laser beam in a second direction.
- the second sub-optic 2962 may output a laser beam having a divergence angle of a second angle.
- the third sub-optic 2963 may output a laser beam in a third direction.
- the third sub-optic 2963 may output a laser beam having a divergence angle of a third angle.
- the fourth sub-optic 2964 may output a laser beam in a fourth direction. Also, the fourth sub-optic 2964 may output a laser beam having a divergence angle of a fourth angle.
- a center of a laser beam output from each big cell unit may be indicated by a solid line, and a divergence beam may be indicated by a dotted line.
- the center of the laser beam output from the first bixel unit 2901 and output through the first sub-optic 2961 and the laser beam output from the second bixel unit 2902 and through the second sub-optic 2962 The angle formed by the center may be less than the sum of half of the first angle and half of the second angle.
- the angle formed by the center of the laser beam output from the first big cell unit 2901 and the center of the laser beam output from the second big cell unit 2902 may be less than half of the sum of the first angle and the second angle. have.
- the center of the laser beam output from the first bixel unit 2901 and output through the first sub-optic 2961 and the laser beam output from the second bixel unit 2902 and through the second sub-optic 2962 When the angle formed by the center is greater than half of the sum of the first angle and the second angle, between the laser beam output from the first vixel unit 2901 and the laser beam output from the second vixel unit 2902 , Dead zone, which is an area where the laser beam is not irradiated, may occur.
- the laser beam output from the first big cell unit 2901 and the laser beam output from the second big cell unit 2902 may come into contact with each other, or at least some of them may overlap.
- the first sub-optic 2961 may output a collimation beam in a first direction and a divergence beam in a second direction and a third direction.
- the second sub-optic 2962 may output a collimation beam in a fourth direction, and may output a divergence beam in the third and fifth directions.
- the third sub-optic 2963 may output a collimation beam in a sixth direction, and may output a divergence beam in the second and seventh directions.
- the divergence beam of the first sub-optic 2961 and the divergence beam of the third sub-optic 2963 may be output in the same direction.
- the divergence beam of the first sub-optic 2961 and the divergence beam of the third sub-optic 2963 may be output in a direction perpendicular to a surface on which the laser output unit is disposed.
- 43 is a diagram illustrating reference points for measuring distances between big cell modules according to an exemplary embodiment.
- FIG. 43 illustrates a big cell module in which big cell arrays included in the big cell module are arranged vertically, but is not limited thereto.
- a lidar device 2003 may include a plurality of big cell modules 2350 and 2360.
- the lidar device 2003 may include a first big cell module 2350 and a second big cell module 2360.
- the first big cell module 2350 may include a body 2301, a first surface 2302, and a first big cell array 2310.
- the first big cell array 2310 may be disposed on the first surface 2302 of the body 2301.
- the second big cell module 2360 may include a body 2361, a second surface 2362 and a second big cell array 2320.
- the second big cell array 2320 may be disposed on the second surface 2362 of the body 2361.
- it is perpendicular to the first surface 2302 on which the first big cell array 2310 of the first big cell module 2350 is disposed, and the rear side in the direction in which the first big cell array 2310 outputs a laser beam.
- the first virtual line L1 may be a virtual line extending from a first point of the first big cell array 2310.
- the first point may be a central point of the first big cell array 2310, but is not limited thereto.
- the first point may be a point of the first big cell array 2310, for example, a point having constant coordinates with respect to the x-axis and y-axis with respect to the center point.
- the first point may be a point having coordinates of (a,b) with respect to the x-axis and y-axis with respect to the center point of the first big cell array 2310.
- the second big cell array 2320 of the second big cell module 2360 is perpendicular to the second surface 2362 on which the second big cell array 2320 is disposed, and the second big cell array 2320 is in a direction in which the laser beam is output.
- a second virtual line L2 extending rearward may exist.
- the second virtual line L2 may be a virtual line extending from a second point of the second big cell array 2320.
- the second point may be a central point of the second big cell array 2320.
- the second point may be a point of the first big cell array 2320, for example, a point having constant coordinates with respect to the x-axis and y-axis with respect to the center point.
- the second point may be a point having coordinates of (c,d) with respect to the x-axis and y-axis with respect to the center point of the second big cell array 2320.
- the coordinates of the first point and the coordinates of the second point may be the same.
- a and c may be the same, and b and d may be the same.
- the first virtual line L1 and the second virtual line L2 may intersect.
- the first virtual line L1 and the second virtual line L2 may form an intersection.
- the intersection of the first virtual line L1 and the second virtual line L2 may be the reference point P.
- the reference point P may be included in a surface shared by the first big cell module 2350 and the second big cell module 2360. In addition, the reference point P may be included in a corner shared by the first big cell module 2350 and the second big cell module 2360. In addition, the reference point P may be an intersection point where the first big cell module 2350 and the second big cell module 2360 meet.
- the reference point P may be stored in advance in the controller of the lidar device.
- a minimum distance R may be determined between the reference point P and the first big cell array 2310. Also, for example, a minimum distance may be determined between the reference point P and the second big cell array 2320.
- the minimum distance R between the reference point P and the first big cell array 2310 may be the same as the minimum distance between the reference point P and the second big cell array 2320.
- the minimum distance R between the reference point P and the first big cell array 2310 may be a minimum distance between the reference point P and the first surface 2302.
- the minimum distance R between the reference point P and the second big cell array 2320 may be a minimum distance between the reference point P and the second surface 2362.
- the minimum distance R between the reference point P and the first big cell array 2310 may be different from the minimum distance between the reference point P and the second big cell array 2320.
- 44 is a diagram illustrating reference points for measuring distances between big cell modules according to another embodiment.
- a lidar device 2004 may include a plurality of big cell modules 2450 and 2460.
- the lidar device 2004 may include a first big cell module 2450 and a second big cell module 2460.
- the first big cell module 2450 may include a body 2401, a first surface 2402, and a first big cell array 2410.
- the first big cell array 2410 may be disposed on the first surface 2402 of the body 2401.
- the second big cell module 2460 may include a body 2461, a second surface 2462 and a second big cell array 2420.
- the second big cell array 2420 may be disposed on the second surface 2462 of the body 2461.
- it is perpendicular to the first surface 2402 on which the first big cell array 2410 of the first big cell module 2450 is disposed, and the rear side in the direction in which the first big cell array 2410 outputs a laser beam.
- the first virtual line L1 may be a virtual line extending from a first point of the first big cell array 2310.
- the first point may be a central point of the first big cell array 2310, but is not limited thereto.
- the first point may be a point of the first big cell array 2310, for example, a point having constant coordinates with respect to the x-axis and y-axis with respect to the center point.
- the first point may be a point having coordinates of (a,b) with respect to the x-axis and y-axis with respect to the center point of the first big cell array 2310.
- the second big cell array 2420 of the second big cell module 2450 is perpendicular to the second surface 2462 on which the second big cell array 2420 is disposed, and the second big cell array 2420 is A second virtual line L2 extending rearward may exist.
- the second virtual line L2 may be a virtual line extending from a second point of the second big cell array 2320.
- the second point may be a central point of the second big cell array 2320.
- the second point may be a point of the first big cell array 2320, for example, a point having constant coordinates with respect to the x-axis and y-axis with respect to the center point.
- the second point may be a point having coordinates of (c,d) with respect to the x-axis and y-axis with respect to the center point of the second big cell array 2320.
- the coordinates of the first point and the coordinates of the second point may be the same.
- a and c may be the same, and b and d may be the same.
- the first virtual line L1 and the second virtual line L2 may intersect.
- the first virtual line L1 and the second virtual line L2 may form an intersection.
- the intersection of the first virtual line L1 and the second virtual line L2 may be the reference point P.
- the reference point P may be included in a surface shared by the first big cell module 2450 and the second big cell module 2460. In addition, the reference point P may be included in a corner shared by the first big cell module 2450 and the second big cell module 2460. In addition, the reference point P may be an intersection point where the first big cell module 2450 and the second big cell module 2460 meet.
- a minimum distance R may be determined between the reference point P and the first big cell array 2410. Also, for example, a minimum distance may be determined between the reference point P and the first big cell array 2410.
- the minimum distance R between the reference point P and the first big cell array 2410 may be the same as the minimum distance between the reference point P and the first big cell array 2410.
- the minimum distance R between the reference point P and the first big cell array 2410 may be a minimum distance between the reference point P and the first surface 2402.
- the minimum distance R between the reference point P and the second big cell array 2420 may be a minimum distance between the reference point P and the second surface 2462.
- 45 to 47 are diagrams illustrating reference points for measuring distances between big cell modules according to another embodiment.
- 45 to 47 illustrate big cell modules in which big cell arrays included in the big cell module are arranged vertically, but are not limited thereto.
- a lidar device 2003 may include a plurality of big cell modules 2350, 2360, and 2370.
- the lidar device 2003 may include a first big cell module 2350, a second big cell module 2360, and a third big cell module 2370.
- the first big cell module 2350 may include a body 2301, a first surface 2302, and a first big cell array 2310.
- the first big cell array 2310 may be disposed on the first surface 2302 of the body 2301.
- the second big cell module 2360 may include a body 2361, a second surface 2362 and a second big cell array 2320.
- the second big cell array 2320 may be disposed on the second surface 2362 of the body 2361.
- the third big cell module 2370 may include a body 2231, a third surface 2372, and a third big cell array 2330.
- the third big cell array 2330 may be disposed on the third surface 2372 of the body 2371.
- it is perpendicular to the first surface 2302 on which the first big cell array 2310 of the first big cell module 2350 is disposed, and the rear side in the direction in which the first big cell array 2310 outputs a laser beam.
- the first virtual line L1 may be a virtual line extending from a first point of the first big cell array 2310.
- the first point may be a central point of the first big cell array 2310, but is not limited thereto.
- the first point may be a point of the first big cell array 2310, for example, a point having constant coordinates with respect to the x-axis and y-axis with respect to the center point.
- the first point may be a point having coordinates of (a,b) with respect to the x-axis and y-axis with respect to the center point of the first big cell array 2310.
- the second big cell array 2320 of the second big cell module 2360 is perpendicular to the second surface 2362 on which the second big cell array 2320 is disposed, and the second big cell array 2320 is in a direction in which the laser beam is output.
- a second virtual line L2 extending rearward may exist.
- the second virtual line L2 may be a virtual line extending from a second point of the second big cell array 2320.
- the second point may be a central point of the second big cell array 2320.
- the second point may be a point of the first big cell array 2320, for example, a point having constant coordinates with respect to the x-axis and y-axis with respect to the center point.
- the second point may be a point having coordinates of (c,d) with respect to the x-axis and y-axis with respect to the center point of the second big cell array 2320.
- a direction in which the third big cell array 2330 of the third big cell module 2370 is disposed is perpendicular to the third surface 2372 and the third big cell array 2330 outputs a laser beam.
- a third virtual line L3 extending rearward may exist.
- the third virtual line L3 may be a virtual line extending from a third point of the third big cell array 2330.
- the third point may be a central point of the third big cell array 2330.
- the second point may be a point of the first big cell array 2330, for example, a point having constant coordinates with respect to the x-axis and y-axis with respect to the center point.
- the third point may be a point having coordinates of (e,f) with respect to the x-axis and y-axis with respect to the center point of the third big cell array 2330.
- the coordinates of the first point, the coordinates of the second point, and the coordinates of the third point are It can be the same.
- the coordinates of the first point (a,b) the coordinates of the second point (c,d), and the coordinates of the third point (e,f)
- a, c, e Is the same, and b, d, and f may be the same.
- a first virtual line L1, a second virtual line L2, and a third virtual line L3 may intersect.
- the first virtual line L1, the second virtual line L2, and the third virtual line L3 may form an intersection.
- the intersection of the first virtual line L1, the second virtual line L2, and the third virtual line L3 may be the reference point P.
- the reference point P may be included in a surface shared by the first big cell module 2350 and the second big cell module 2360. In addition, the reference point P may be included in a surface shared by the second big cell module 2360 and the third big cell module 2370.
- the reference point P may be included in a corner shared by the first big cell module 2350 and the second big cell module 2360. In addition, the reference point P may be included in an edge shared by the second big cell module 2360 and the third big cell module 2370. In addition, the reference point P may be included in a corner shared by the first big cell module 2350 and the third big cell module 2370.
- the reference point P may be an intersection point where the first big cell module 2350 and the second big cell module 2360 meet. In addition, the reference point P may be an intersection point where the second big cell module 2360 and the third big cell module 2370 meet. In addition, the reference point P may be an intersection point where the first big cell module 2350 and the third big cell module 2370 meet. In addition, the reference point P may be an intersection point where the first big cell module 2350, the second big cell module 2360, and the third big cell module 2370 meet.
- a minimum distance R may be determined between the reference point P and the first big cell array 2310. Also, for example, a minimum distance may be determined between the reference point P and the second big cell array 2320. Also, for example, a minimum distance may be determined between the reference point P and the third big cell array 2330.
- the minimum distance R between the reference point P and the first big cell array 2310 may be the same as the minimum distance between the reference point P and the second big cell array 2320.
- the minimum distance R between the reference point P and the first big cell array 2310 may be the same as the minimum distance between the reference point P and the third big cell array 2330.
- the minimum distance R between the reference point P and the second big cell array 2320 may be the same as the minimum distance between the reference point P and the third big cell array 2330.
- the minimum distance R between the reference point P and the first big cell array 2310 may be a minimum distance between the reference point P and the first surface 2302.
- the minimum distance R between the reference point P and the second big cell array 2320 may be a minimum distance between the reference point P and the second surface 2362.
- the minimum distance R between the reference point P and the third big cell array 2330 may be a minimum distance between the reference point P and the third surface 2372.
- the minimum distance R between the reference point P and the first big cell array 2310 may not be the same as the minimum distance between the reference point P and the second big cell array 2320. have. In addition, the minimum distance R between the reference point P and the first big cell array 2310 may not be the same as the minimum distance between the reference point P and the third big cell array 2330. In addition, the minimum distance R between the reference point P and the second big cell array 2320 may not be the same as the minimum distance between the reference point P and the third big cell array 2330.
- the first virtual line L1, the second virtual line L2, and the third virtual line L3 may intersect.
- the first virtual line L1 and the second virtual line L2 may form an intersection.
- the second virtual line L2 and the third virtual line L3 may form an intersection.
- the first virtual line L1 and the third virtual line L3 may form an intersection. In this case, an intersection point C of the first virtual line L1 and the second virtual line L2 may be formed.
- the first virtual line L1, the second virtual line L2, and the third virtual line L3 may form one intersection point or several intersection points.
- the first imaginary line L1, the second imaginary line L2, and the third imaginary line L3 form a plurality of intersections, there may be a problem as to which of the plurality of intersections should be used as a reference point. .
- intersection region capable of including all intersection points may be formed.
- the crossing region may be formed in a sphere shape, but is not limited thereto.
- the center of the intersection area may be taken as a reference point. Accordingly, even if multiple intersection points of virtual lines are formed, if included in the intersection area, the distance to the object can be calculated using the origin of the intersection area as a reference point.
- the intersection of the first virtual line L1 and the second virtual line L2 is C.
- the third virtual line L3 may be separated from the intersection point C.
- the minimum distance between the third virtual line L3 and the intersection point C may be D.
- a sphere including both the third virtual line L3 and the intersection point C may be formed.
- the diameter of the sphere may be D.
- the origin (center) of the sphere may be determined as the reference point (P).
- an intersection point of the first virtual line L1 and the second virtual line L2 may be a first intersection point C1.
- the intersection of the second virtual line L2 and the third virtual line L3 may be a second intersection C2.
- the intersection of the first virtual line L1 and the third virtual line L3 may be a third intersection C3.
- the reference point P may be determined based on the first intersection C1, the second intersection C2, and the third intersection C3.
- a sphere including all of the first intersection point C1, the second intersection point C2, and the third intersection point C3 may be formed.
- the diameter of the sphere may be D.
- D may be the largest distance among the distances between the first intersection point C1, the second intersection point C2, and the third intersection point C3.
- the origin (center) of the sphere may be determined as the reference point (P).
- the distance between the first intersection point C1 and the second intersection point C2 may be obtained.
- the distance between the second intersection point C2 and the third intersection point C3 may be obtained.
- the distance between the first intersection point C1 and the third intersection point C3 may be obtained.
- the distance between the first intersection (C1) and the second intersection (C2), the distance between the second intersection (C2) and the third intersection (C3), between the first intersection (C1) and the third intersection (C3) The largest value among the distances of can be determined as the diameter D of the sphere.
- the reference point P may be located in the middle of the two intersection points having the largest distance between them.
- the reference point P will be a point located at the center of the first intersection point C1 and the second intersection point C2. I can.
- the lidar device 2003 may calculate a distance from the lidar device to the object based on the reference point P, which is the origin of the sphere.
- the lidar device 2003 may calculate a distance from the first big cell array 2310 to an object.
- the lidar device 2003 may calculate a distance from the reference point P to the first big cell array 2310.
- the lidar device 2003 may determine a distance from the lidar device 2003 to the object as a distance from the reference point P to the object.
- the distance from the reference point P to the object may be a sum of a distance from the reference point P to the first big cell array 2310 from the distance from the first big cell array 2310 to the object.
- the lidar device 2003 may calculate a distance from the second big cell array 2320 to the object.
- the lidar device 2003 may calculate a distance from the reference point P to the second big cell array 2320.
- the lidar device 2003 may determine a distance from the lidar device 2003 to the object as a distance from the reference point P to the object.
- the distance from the reference point P to the object may be a value obtained by adding a distance from the reference point P to the second big cell array 2320 from the distance from the second big cell array 2320 to the object.
- the lidar device 2003 may calculate a distance from the third big cell array 2330 to the object.
- the lidar device 2003 may calculate a distance from the reference point P to the third big cell array 2330.
- the lidar device 2003 may determine a distance from the lidar device 2003 to the object as a distance from the reference point P to the object.
- the distance from the reference point P to the object may be a sum of a distance from the reference point P to the third big cell array 2330 from the distance from the third big cell array 2330 to the object.
- 48 to 50 are diagrams illustrating reference points for measuring distances between big cell modules according to another embodiment.
- 48 to 50 illustrate a big cell module in which big cell arrays included in the big cell module are arranged vertically, but are not limited thereto.
- the lidar device 2004 may include a plurality of big cell modules 2450, 2460, and 2470.
- the lidar device 2004 may include a first big cell module 2450, a second big cell module 2460, and a third big cell module 2470.
- the first big cell module 2450 may include a body 2401, a first surface 2402, and a first big cell array 2410.
- the first big cell array 2410 may be disposed on the first surface 2402 of the body 2401.
- the second big cell module 2460 may include a body 2461, a second surface 2462 and a second big cell array 2420.
- the second big cell array 2420 may be disposed on the second surface 2462 of the body 2461.
- the third big cell module 2470 may include a body 2471, a third surface 2472 and a third big cell array 2430.
- the third big cell array 2430 may be disposed on the third surface 2472 of the body 2471.
- it is perpendicular to the first surface 2402 on which the first big cell array 2410 of the first big cell module 2450 is disposed, and the rear side in the direction in which the first big cell array 2410 outputs a laser beam.
- the second big cell array 2420 of the second big cell module 2460 is perpendicular to the second surface 2462 on which the second big cell array 2420 is disposed, and the second big cell array 2420 is in a direction in which the laser beam is output.
- a second virtual line L2 extending rearward may exist.
- a third virtual line L3 extending rearward may exist.
- a first virtual line L1, a second virtual line L2, and a third virtual line L3 may intersect.
- the first virtual line L1, the second virtual line L2, and the third virtual line L3 may form an intersection.
- the intersection of the first virtual line L1, the second virtual line L2, and the third virtual line L3 may be the reference point P.
- the reference point P may be included in a surface shared by the first big cell module 2450 and the second big cell module 2460. In addition, the reference point P may be included in a surface shared by the second big cell module 2460 and the third big cell module 2470.
- the reference point P may be included in a corner shared by the first big cell module 2450 and the second big cell module 2460. In addition, the reference point P may be included in an edge shared by the second big cell module 2460 and the third big cell module 2470. In addition, the reference point P may be included in a corner shared by the first big cell module 2450 and the third big cell module 2470.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Optics & Photonics (AREA)
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Semiconductor Lasers (AREA)
- Measurement Of Optical Distance (AREA)
Abstract
본 발명의 빅셀 어레이는 제1 축을 따라 배치되는 복수의 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 유닛을 포함하는 제1 서브 어레이, 제1 상부 컨택 및 제1 하부 컨택을 포함하고, 상기 제1 서브 어레이에 포함되는 제1 빅셀 유닛, 제2 상부 컨택 및 제2 하부 컨택을 포함하고, 상기 제1 서브 어레이에 포함되는 제2 빅셀 유닛, 상기 제1 상부 컨택 및 상기 제2 하부 컨택과 전기적으로 연결되는 제1 컨택, 및 상기 제2 상부 컨택 및 상기 제1 하부 컨택과 전기적으로 연결되는 제2 컨택을 포함하고, 상기 제1 컨택에 제1 전압이 인가되고, 상기 제2 컨택에 상기 제1 전압보다 작은 제2 전압이 인가되는 경우, 상기 제1 빅셀 유닛이 작동하고, 상기 제1 컨택에 상기 제2 전압이 인가되고, 상기 제2 컨택에 상기 제1 전압이 인가되는 경우, 상기 제2 빅셀 유닛이 작동할 수 있다.
Description
본 발명은 빅셀(VCSEL: Vertical Cavity Surface Emitting Laser) 어레이 및 이를 이용한 라이다 장치에 관한 것으로, 보다 상세하게는, 빅셀 어레이에 포함된 빅셀 유닛들의 레이저 빔 출력 효율이 향상된 빅셀 어레이 및 이를 이용한 라이다 장치에 관한 것이다.
빅셀(VCSEL: Vertical Cavity Surface Emitting Laser)은 상부 표면에 수직 방향으로 레이저 빔을 방출하는 반도체 레이저 다이오드이다. 빅셀은 단거리의 광통신 분야, 이미지 센싱 및 레이저를 이용하여 대상체와의 거리를 탐지하는 라이다 분야에서 쓰일 수 있다.
본 발명의 일 과제는 레이저 빔 출력 효율을 향상시킬 수 있는 빅셀 어레이에 관한 것이다.
본 발명의 일 과제는 빅셀 유닛들의 효율적인 동작을 위한 구조를 가지는 빅셀 어레이에 관한 것이다.
본 발명의 일 과제는 웨이퍼 내에서 효율적인 수율을 가질 수 있도록 배치된 빅셀 어레이에 관한 것이다.
본 발명의 일 과제는 솔리드 스테이트 라이다(Solid-state LiDAR) 장치에 포함되는 레이저 출력 장치를 제공하는 것이다.
본 발명의 다른 일 과제는 솔리드 스테이트 라이다(Solid-state LiDAR) 장치에 포함되는 레이저 출력 장치에 이용되는 스티어링 컴포넌트를 제공하는 것이다.
본 발명의 다른 일 과제는 솔리드 스테이트 라이다(Solid-state LiDAR) 장치를 제공하는 것이다.
본 발명의 다른 일 과제는 사람의 눈 건강에 영향을 미치지 않으면서 측정거리를 향상시킬 수 있는 라이다 장치에 관한 것이다.
본 발명의 다른 일 과제는 사람의 눈 건강에 영향을 미치지 않으면서 측정거리를 향상시킬 수 있는 레이저 출력 디바이스에 관한 것이다.
본 발명의 다른 일 과제는 출력되는 레이저가 조사되지 않는 영역을 최소화 하여 감지되지 않는 대상체를 최소화 하기 위한 라이다 장치에 관한 것이다.
일 실시예에 따른 라이다 장치는 대상체를 향해 레이저를 조사하는 레이저 출력부, 및 상기 레이저 출력부에서 조사된 레이저가 상기 대상체에 반사되어 되돌아오는 레이저를 수광하는 레이저 수광부를 포함하고, 상기 레이저 출력부는 바디의 제1 면 상에 배치되고, 상기 레이저 출력부는 제1 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 어레이 및 제2 빅셀 어레이를 포함하고, 상기 제1 빅셀 어레이는 레이저 빔을 제1 방향으로 출력하는 제1 빅셀 유닛 및 레이저 빔을 제2 방향으로 출력하는 제2 빅셀 유닛을 포함하고, 상기 제2 빅셀 어레이는 레이저 빔을 상기 제1 방향으로 출력하는 제3 빅셀 유닛을 포함하고, 상기 제1 빅셀 유닛과 상기 제2 빅셀 유닛은 제1 간격을 가지고 배치되고, 상기 제1 빅셀 유닛과 상기 제3 빅셀 유닛의 간격은 상기 제1 간격 이하일 수 있다.
일 실시예에 따른 라이다 장치는 대상체를 향해 레이저를 조사하는 레이저 출력부, 및 상기 레이저 출력부에서 조사된 레이저가 상기 대상체에 반사되어 되돌아오는 레이저를 수광하는 레이저 수광부를 포함하고, 상기 레이저 출력부는 바디의 제1 면 상에 배치되고, 상기 레이저 출력부는 제1 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 어레이를 포함하고, 상기 레이저 출력부는 상기 제1 빅셀 어레이로부터 출력되는 레이저 빔을 콜리메이션 시키는 제1 옵틱 및 상기 제1 빅셀 어레이 및 상기 제2 빅셀 어레이로부터 출력되는 레이저 빔을 스티어링 시키는 제2 옵틱을 포함하고, 상기 제1 빅셀 어레이는 제1 빅셀 유닛 및 제2 빅셀 유닛을 포함하고, 상기 제1 빅셀 유닛은 제1 각도의 다이버전스 각도를 가지는 레이저를 출력하고, 상기 제2 빅셀 유닛은 제2 각도의 다이버전스 각도를 가지는 레이저를 출력하고, 상기 제2 옵틱에 포함되는 제1 서브 옵틱은 상기 제1 빅셀 유닛으로부터 출력되는 레이저 빔을 제1 방향으로 스티어링 시키고, 상기 제2 옵틱에 포함되는 제2 서브 옵틱은 상기 제2 빅셀 유닛으로부터 출력되는 레이저 빔을 제2 방향으로 스티어링 시키고, 상기 제1 빅셀 유닛으로부터 출력되는 레이저 빔과 상기 제2 빅셀 유닛으로부터 출력되는 레이저 빔 사이에 상기 레이저 출력부로부터 레이저가 조사되지 않는 영역이 발생되지 않도록, 상기 제1 방향과 상기 제2 방향이 이루는 각도는 상기 제1 각도와 상기 제2 각도의 합의 절반 이하일 수 있다.
일 실시예에 따른 라이다 장치는 대상체를 향해 레이저를 조사하는 레이저 출력부, 및 상기 레이저 출력부에서 조사된 레이저가 상기 대상체에 반사되어 되돌아오는 레이저를 수광하는 레이저 수광부를 포함하고, 상기 레이저 출력부는 제1 면을 갖는 바디 상에 배치되며, 상기 레이저 출력부는 제1 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 어레이 및 제2 빅셀 어레이를 포함하고, 상기 제1 빅셀 어레이는 레이저 빔을 출력하여 제1 수평 FOV(Horizontal Field Of View)를 형성하고, 상기 제2 빅셀 어레이는 레이저 빔을 출력하여 제2 수평 FOV를 형성하고, 상기 제1 수평 FOV와 상기 제2 수평 FOV는 상기 제1 축 -상기 제1 축은 상기 제1 면의 수평축을 나타냄- 을 기준으로 제1 영역에 오버랩되고, 상기 제1 영역은 상기 제1 수평 FOV 중 상기 제1 빅셀 어레이가 상기 제1 면과 수직인 방향으로 레이저 빔을 출력하여 형성되는 FOV 및 상기 제2 수평 FOV 중 상기 제2 빅셀 어레이가 상기 제1 면과 수직인 방향으로 레이저 빔을 출력하여 형성되는 FOV를 포함할 수 있다.
일 실시예에 따른 레이저 출력 장치는 대상체를 향해 레이저를 조사하는 레이저 출력부를 포함하고, 상기 레이저 출력부는 바디의 제1 면 상에 배치되고, 상기 레이저 출력부는 제1 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 어레이 및 제2 빅셀 어레이를 포함하고, 상기 제1 빅셀 어레이는 레이저 빔을 제1 방향으로 출력하는 제1 빅셀 유닛 및 레이저 빔을 제2 방향으로 출력하는 제2 빅셀 유닛을 포함하고, 상기 제2 빅셀 어레이는 레이저 빔을 상기 제1 방향으로 출력하는 제3 빅셀 유닛을 포함하고, 상기 제1 빅셀 유닛과 상기 제2 빅셀 유닛은 제1 간격을 가지고 배치되고, 상기 제1 빅셀 유닛과 상기 제3 빅셀 유닛의 간격은 상기 제1 간격 이하일 수 있다.
일 실시예에 따른 레이저 출력 장치는 대상체를 향해 레이저를 조사하는 레이저 출력부를 포함하고, 상기 레이저 출력부는 바디의 제1 면 상에 배치되고, 상기 레이저 출력부는 제1 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 어레이를 포함하고, 상기 레이저 출력부는 상기 제1 빅셀 어레이로부터 출력되는 레이저 빔을 콜리메이션 시키는 제1 옵틱 및 상기 제1 빅셀 어레이 및 상기 제2 빅셀 어레이로부터 출력되는 레이저 빔을 스티어링 시키는 제2 옵틱을 포함하고, 상기 제1 빅셀 어레이는 제1 빅셀 유닛 및 제2 빅셀 유닛을 포함하고, 상기 제1 빅셀 유닛은 제1 각도의 다이버전스 각도를 가지는 레이저를 출력하고, 상기 제2 빅셀 유닛은 제2 각도의 다이버전스 각도를 가지는 레이저를 출력하고, 상기 제2 옵틱에 포함되는 제1 서브 옵틱은 상기 제1 빅셀 유닛으로부터 출력되는 레이저 빔을 제1 방향으로 스티어링 시키고, 상기 제2 옵틱에 포함되는 제2 서브 옵틱은 상기 제2 빅셀 유닛으로부터 출력되는 레이저 빔을 제2 방향으로 스티어링 시키고, 상기 제1 빅셀 유닛으로부터 출력되는 레이저 빔과 상기 제2 빅셀 유닛으로부터 출력되는 레이저 빔 사이에 상기 레이저 출력부로부터 레이저가 조사되지 않는 영역이 발생되지 않도록, 상기 제1 방향과 상기 제2 방향이 이루는 각도는 상기 제1 각도와 상기 제2 각도의 합의 절반 이하일 수 있다.
다른 일 실시예에 따른 거리 산출 방법은 레이저 출력부, 레이저 수광부 및 컨트롤러를 포함하는 라이다 장치를 이용한 거리 산출 방법으로, 상기 레이저 출력부 중 제1 레이저 출력부가 레이저 빔을 출력하는 단계, 상기 제1 레이저 출력부가 레이저 빔을 출력하는 출광 시점을 획득하는 단계, 상기 수광부가 상기 출력된 레이저 빔 중 대상체로부터 반사되는 레이저 빔을 수광하는 단계, 상기 수광되는 레이저 빔의 수광 시점을 획득하는 단계, 상기 출광 시점 및 상기 수광 시점에 기초하여 상기 수광되는 레이저 빔의 비행 거리를 산출하는 단계, 및 상기 비행 거리에 기초하고, 상기 제1 레이저 출력부와 수직이고, 상기 제1 레이저 출력부로부터 출력되는 레이저 빔의 진행 방향의 후방으로 연장되는 제1 가상선 및 상기 레이저 출력부에 포함된 제2 레이저 출력부와 수직이고, 상기 제2 레이저 출력부로부터 출력되는 레이저 빔의 진행 방향의 후방으로 연장되는 제2 가상선에 기초하여 정의되는 기준점으로부터 상기 대상체까지의 거리를 획득하는 단계를 포함할 수 있다.
다른 일 실시예에 따른 라이다 장치는 대상체를 향해 레이저를 조사하는 레이저 출력부, 상기 레이저 출력부에서 조사된 레이저가 상기 대상체에 반사되어 되돌아오는 레이저를 수광하는 레이저 수광부, 및 상기 레이저 출력부에서 레이저가 출력되는 출광 시점 및 상기 대상체로부터 반사되는 레이저 빔이 수광되는 수광 시점을 획득하고, 상기 출광 시점 및 상기 수광 시점에 기초하여 산출되는 상기 수광되는 레이저 빔의 비행 거리에 기초하고, 상기 레이저 출력부 중 제1 레이저 출력부와 수직이고, 상기 제1 레이저 출력부로부터 출력되는 레이저 빔의 진행 방향의 후방으로 연장되는 제1 가상선 및 상기 레이저 출력부 중 제2 레이저 출력부와 수직이고, 상기 제2 레이저 출력부로부터 출력되는 레이저 빔의 진행 방향의 후방으로 연장되는 제2 가상선에 기초하여 정의되는 기준점으로부터 상기 대상체까지의 거리를 산출하는 제어부를 포함할 수 있다.
일 실시예에 따른 빅셀은 제1 DBR 레이어, 제2 DBR 레이어, 상기 제1 DBR 레이어 및 상기 제2 DBR 레이어 사이에 배치되어 레이저 빔을 출력하는 활성 레이어, 상기 제1 DBR 레이어 상에 배치된 컨택 영역, 및 상기 컨택 영역 상에 배치되는 리플렉터를 포함하고, 상기 리플렉터는 상기 컨택 영역과 마주하는 제1 면을 가지고, 상기 제1 면은 상기 활성 레이어로부터 상기 컨택 영역을 통해 출력되는 레이저 빔을 반사시킬 수 있다.
일 실시예에 따른 라이다 장치는 대상체를 향해 레이저를 조사하는 레이저 출력부, 및 상기 레이저 출력부에서 조사된 레이저가 상기 대상체에 반사되어 되돌아오는 레이저를 수광하는 레이저 수광부를 포함하고, 상기 레이저 출력부는 복수의 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 이미터(emitter)를 포함하고, 상기 빅셀 이미터는 제1 DBR 레이어, 제2 DBR 레이어, 상기 제1 DBR 레이어 및 상기 제2 DBR 레이어 사이에 배치되어 레이저 빔을 출력하는 활성 레이어, 상기 제1 DBR 레이어 상에 배치된 컨택 영역, 및 상기 컨택 영역 상에 배치되는 리플렉터를 포함하고, 상기 리플렉터는 상기 컨택 영역과 마주하는 제1 면을 가지고, 상기 제1 면은 상기 활성 레이어로부터 상기 컨택 영역을 통해 출력되는 레이저 빔을 반사시킬 수 있다.
일 실시예에 따른 빅셀 어레이는 제1 축을 따라 배치되는 복수의 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 유닛을 포함하는 제1 서브 어레이, 제1 상부 컨택 및 제1 하부 컨택을 포함하고, 상기 제1 서브 어레이에 포함되는 제1 빅셀 유닛, 제2 상부 컨택 및 제2 하부 컨택을 포함하고, 상기 제1 서브 어레이에 포함되는 제2 빅셀 유닛, 상기 제1 상부 컨택 및 상기 제2 하부 컨택과 전기적으로 연결되는 제1 컨택, 및 상기 제2 상부 컨택 및 상기 제1 하부 컨택과 전기적으로 연결되는 제2 컨택을 포함하고, 상기 제1 컨택에 제1 전압이 인가되고, 상기 제2 컨택에 상기 제1 전압보다 작은 제2 전압이 인가되는 경우, 상기 제1 빅셀 유닛이 작동하고, 상기 제1 컨택에 상기 제2 전압이 인가되고, 상기 제2 컨택에 상기 제1 전압이 인가되는 경우, 상기 제2 빅셀 유닛이 작동할 수 있다.
일 실시예에 따른 빅셀 어레이는 제1 축을 따라 배치되는 복수의 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 유닛을 포함하는 제1 서브 어레이, 제1 상부 DBR(Distributed Bragg Reflector) 및 제1 하부 DBR을 포함하고, 상기 제1 서브 어레이에 포함되는 제1 빅셀 유닛, 제2 상부 DBR 및 제2 하부 DBR을 포함하고, 상기 제1 서브 어레이에 포함되는 제2 빅셀 유닛, 상기 제1 상부 DBR 및 상기 제2 상부 DBR과 전기적으로 연결되는 제1 컨택, 및 상기 제1 하부 DBR 및 상기 제2 하부 DBR과 전기적으로 연결되는 제2 컨택을 포함하고, 상기 제1 상부 DBR 및 상기 제2 하부 DBR은 P형으로 도핑되고, 상기 제2 상부 DBR 및 상기 제1 하부 DBR은 N형으로 도핑되고, 상기 제1 컨택에 제1 전압이 인가되고, 상기 제2 컨택에 상기 제1 전압보다 작은 제2 전압이 인가되는 경우, 상기 제1 빅셀 유닛이 작동하고, 상기 제1 컨택에 상기 제2 전압이 인가되고, 상기 제2 컨택에 상기 제1 전압이 인가되는 경우, 상기 제2 빅셀 유닛이 작동할 수 있다.
일 실시예에 따른 빅셀 어레이는 제1 축을 따라 배치되는 복수의 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 유닛을 포함하는 제1 서브 어레이, 제1 DBR(Distributed Bragg Reflector) 및 제2 DBR을 포함하고, 상기 제1 서브 어레이에 포함되는 제1 빅셀 유닛, 제3 DBR 및 제4 DBR을 포함하고, 상기 제1 서브 어레이에 포함되는 제2 빅셀 유닛, 상기 제1 DBR 및 상기 제3 DBR과 전기적으로 연결되는 제1 컨택, 및 상기 제2 DBR 및 상기 제4 DBR과 전기적으로 연결되는 제2 컨택을 포함하고, 상기 제1 DBR 및 상기 제4 DBR은 제1 성질로 도핑되고, 상기 제2 DBR 및 상기 제3 DBR은 상기 제1 성질과 다른 제2 성질로 도핑되고, 상기 제2 DBR의 반사율은 상기 제1 DBR의 반사율보다 크고, 상기 제4 DBR의 반사율은 상기 제3 DBR의 반사율보다 크고, 상기 제1 컨택에 제1 전압이 인가되고, 상기 제2 컨택에 상기 제1 전압보다 작은 제2 전압이 인가되는 경우, 상기 제1 빅셀 유닛이 작동하고, 상기 제1 컨택에 상기 제2 전압이 인가되고, 상기 제2 컨택에 상기 제1 전압이 인가되는 경우, 상기 제2 빅셀 유닛이 작동할 수 있다.
일 실시예에 따른 라이다 장치는 대상체를 향해 레이저를 조사하는 레이저 출력부, 및 상기 레이저 출력부에서 조사된 레이저가 상기 대상체에 반사되어 되돌아오는 레이저를 수광하는 레이저 수광부를 포함하고, 상기 레이저 출력부는, 제1 축을 따라 배치되는 복수의 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 유닛을 포함하는 제1 서브 어레이, 제1 상부 컨택 및 제1 하부 컨택을 포함하고, 상기 제1 서브 어레이에 포함되는 제1 빅셀 유닛, 제2 상부 컨택 및 제2 하부 컨택을 포함하고, 상기 제1 서브 어레이에 포함되는 제2 빅셀 유닛, 상기 제1 상부 컨택 및 상기 제2 하부 컨택과 전기적으로 연결되는 제1 컨택, 및 상기 제2 상부 컨택 및 상기 제1 하부 컨택과 전기적으로 연결되는 제2 컨택을 포함하고, 상기 제1 컨택에 제1 전압이 인가되고, 상기 제2 컨택에 상기 제1 전압보다 작은 제2 전압이 인가되는 경우, 상기 제1 빅셀 유닛이 작동하고, 상기 제1 컨택에 상기 제2 전압이 인가되고, 상기 제2 컨택에 상기 제1 전압이 인가되는 경우, 상기 제2 빅셀 유닛이 작동할 수 있다.
일 실시예에 따른 라이다 장치는 대상체를 향해 레이저를 조사하는 레이저 출력부, 및 상기 레이저 출력부에서 조사된 레이저가 상기 대상체에 반사되어 되돌아오는 레이저를 수광하는 레이저 수광부를 포함하고, 상기 레이저 출력부는, 제1 축을 따라 배치되는 복수의 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 유닛을 포함하는 제1 서브 어레이, 제1 상부 DBR(Distributed Bragg Reflector) 및 제1 하부 DBR을 포함하고, 상기 제1 서브 어레이에 포함되는 제1 빅셀 유닛, 제2 상부 DBR 및 제2 하부 DBR을 포함하고, 상기 제1 서브 어레이에 포함되는 제2 빅셀 유닛, 상기 제1 상부 DBR 및 상기 제2 상부 DBR과 전기적으로 연결되는 제1 컨택, 및 상기 제1 하부 DBR 및 상기 제2 하부 DBR과 전기적으로 연결되는 제2 컨택을 포함하고, 상기 제1 상부 DBR 및 상기 제2 하부 DBR은 P형으로 도핑되고, 상기 제2 상부 DBR 및 상기 제1 하부 DBR은 N형으로 도핑되고, 상기 제1 컨택에 제1 전압이 인가되고, 상기 제2 컨택에 상기 제1 전압보다 작은 제2 전압이 인가되는 경우, 상기 제1 빅셀 유닛이 작동하고, 상기 제1 컨택에 상기 제2 전압이 인가되고, 상기 제2 컨택에 상기 제1 전압이 인가되는 경우, 상기 제2 빅셀 유닛이 작동할 수 있다.
다른 일 실시예에 따른 빅셀 어레이는 제1 축을 따라 배치되는 제1 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 유닛 및 제2 빅셀 유닛을 포함하는 제1 서브 어레이, 상기 제1 서브 어레이에 연결되는 공통 컨택, 상기 공통 컨택의 일단에 전기적으로 연결되는 제1 컨택, 및 상기 제1 컨택의 일단과 상기 제1 빅셀 유닛 사이의 저항을 나타내는 제1 저항 및 상기 제1 빅셀 유닛과 상기 제2 빅셀 유닛 사이의 저항을 나타내는 제2 저항의 합성 저항이 감소되도록, 상기 공통 컨택의 다른 일단에 전기적으로 연결되는 제2 컨택을 포함하고, 상기 제1 빅셀 유닛은 상기 제2 빅셀 유닛보다 상기 공통 컨택의 일단과 인접하고, 상기 제2 빅셀 유닛은 상기 제1 빅셀 유닛보다 상기 공통 컨택의 다른 일단과 인접할 수 있다.
다른 일 실시예에 따른 빅셀 어레이는 제1 축을 따라 배치되는 제1 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 유닛 및 제2 빅셀 유닛을 포함하는 제1 서브 어레이, 상기 제1 서브 어레이에 연결되는 공통 컨택, 상기 공통 컨택의 일단에 전기적으로 연결되는 제1 컨택, 및 상기 제1 빅셀 유닛의 제1 합성 저항과 상기 제2 빅셀 유닛의 제2 합성 저항의 차이가 감소되도록, 상기 공통 컨택의 다른 일단에 전기적으로 연결되는 제2 컨택을 포함하고, 상기 제1 합성 저항은 상기 공통 컨택의 일단과 상기 제1 빅셀 유닛 사이의 저항을 나타내는 제1 저항 및 상기 제1 빅셀 유닛과 상기 공통 컨택의 다른 일단 사이의 저항을 나타내는 제2 저항의 합성 저항이고, 상기 제2 합성 저항은 상기 공통 컨택의 일단과 상기 제2 빅셀 유닛 사이의 저항을 나타내는 제3 저항 및 상기 제2 빅셀 유닛과 상기 공통 컨택의 다른 일단 사이의 저항을 나타내는 제4 저항의 합성 저항일 수 있다.
다른 일 실시예에 따른 라이다 장치는 대상체를 향해 레이저를 조사하는 레이저 출력부, 및 상기 레이저 출력부에서 조사된 레이저가 상기 대상체에 반사되어 되돌아오는 레이저를 수광하는 레이저 수광부를 포함하고, 상기 레이저 출력부는, 제1 축을 따라 배치되는 제1 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 유닛 및 제2 빅셀 유닛을 포함하는 제1 서브 어레이, 상기 제1 서브 어레이에 연결되는 공통 컨택, 상기 공통 컨택의 일단에 전기적으로 연결되는 제1 컨택, 및 상기 제1 컨택의 일단과 상기 제1 빅셀 유닛 사이의 저항을 나타내는 제1 저항 및 상기 제1 빅셀 유닛과 상기 제2 빅셀 유닛 사이의 저항을 나타내는 제2 저항의 합성 저항이 감소되도록, 상기 공통 컨택의 다른 일단에 전기적으로 연결되는 제2 컨택을 포함하고, 상기 제1 빅셀 유닛은 상기 제2 빅셀 유닛보다 상기 공통 컨택의 일단과 인접하고, 상기 제2 빅셀 유닛은 상기 제1 빅셀 유닛보다 상기 공통 컨택의 다른 일단과 인접할 수 있다.
다른 일 실시예에 따른 라이다 장치는 대상체를 향해 레이저를 조사하는 레이저 출력부, 및 상기 레이저 출력부에서 조사된 레이저가 상기 대상체에 반사되어 되돌아오는 레이저를 수광하는 레이저 수광부를 포함하고, 상기 레이저 출력부는, 제1 축을 따라 배치되는 제1 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 유닛 및 제2 빅셀 유닛을 포함하는 제1 서브 어레이, 상기 제1 서브 어레이에 연결되는 공통 컨택, 상기 공통 컨택의 일단에 전기적으로 연결되는 제1 컨택, 및 상기 제1 빅셀 유닛의 제1 합성 저항과 상기 제2 빅셀 유닛의 제2 합성 저항의 차이가 감소되도록, 상기 공통 컨택의 다른 일단에 전기적으로 연결되는 제2 컨택을 포함하고, 상기 제1 합성 저항은 상기 공통 컨택의 일단과 상기 제1 빅셀 유닛 사이의 저항을 나타내는 제1 저항 및 상기 제1 빅셀 유닛과 상기 공통 컨택의 다른 일단 사이의 저항을 나타내는 제2 저항의 합성 저항이고, 상기 제2 합성 저항은 상기 공통 컨택의 일단과 상기 제2 빅셀 유닛 사이의 저항을 나타내는 제3 저항 및 상기 제2 빅셀 유닛과 상기 공통 컨택의 다른 일단 사이의 저항을 나타내는 제4 저항의 합성 저항일 수 있다.
일 실시예에 따른 레이저 출력 장치는 제1 빅셀 에미터 및 제2 빅셀 에미터를 포함하는 제1 빅셀 유닛 및 제3 빅셀 에미터 및 제4 빅셀 에미터를 포함하는 제2 빅셀 유닛을 포함하는 빅셀 어레이, 상기 빅셀 어레이로부터 출력된 레이저를 콜리메이션 하기 위한 마이크로 렌즈 어레이, 상기 마이크로 렌즈 어레이로부터 콜리메이션 된 레이저를 스티어링하기 위한 프리즘 어레이를 포함하되, 상기 마이크로 렌즈 어레이는 상기 제1 빅셀 에미터에 대응되어 배치되는 제1 마이크로 렌즈 엘리먼트, 상기 제2 빅셀 에미터에 대응되어 배치되는 제2 마이크로 렌즈 엘리먼트, 상기 제3 빅셀 에미터에 대응되어 배치되는 제3 마이크로 렌즈 엘리먼트 및 상기 제4 빅셀 에미터에 대응되어 배치되는 제4 마이크로 렌즈 엘리먼트를 포함하며, 상기 프리즘 어레이는 상기 제1 빅셀 유닛에 대응되어 배치되며 상기 제1 빅셀 유닛으로부터 출력된 레이저를 제1 각도로 스티어링 하기 위한 제1 프리즘 엘리먼트 및 상기 제2 빅셀 유닛에 대응되어 배치되며 상기 제2 빅셀 유닛으로부터 출력된 레이저를 제2 각도로 스티어링 하기 위한 제2 프리즘 엘리먼트를 포함하되, 상기 제1 빅셀 유닛 및 상기 제2 빅셀 유닛이 서로 독립적으로 동작되기 위하여 상기 제1 및 제2 빅셀 에미터는 제1 N-컨택 및 제1 P-컨택을 공유하고, 상기 제3 및 제4 빅셀 에미터는 제2 N-컨택 및 제2 P-컨택을 공유하며, 상기 제1 각도와 상기 제2 각도는 상이할 수 있다.
일 실시예에 따른 레이저 출력 장치는 레이저를 출력하기 위한 제1 빅셀 에미터를 포함하는 빅셀 어레이, 상기 빅셀 어레이로부터 출력된 레이저를 콜리메이션 하기 위한 마이크로 렌즈 어레이 및 상기 마이크로 렌즈 어레이로부터 콜리메이션 된 레이저를 스티어링 하기 위한 프리즘 어레이를 포함하되, 상기 마이크로 렌즈 어레이는 상기 제1 빅셀 에미터로부터 출력된 제1 레이저를 콜리메이션 하기 위한 제1 마이크로 렌즈 엘리먼트를 포함하고, 상기 제1 마이크로 렌즈 엘리먼트로부터 콜리메이션된 상기 제1 레이저는 제1 다이버전스 각도 를 가지며, 상기 프리즘 어레이는 상기 제1 레이저를 스티어링 하기 위한 제1 프리즘 엘리먼트를 포함하되, 상기 제1 프리즘 엘리먼트의 굴절률이 n 이며, 상기 제1 프리즘 엘리먼트의 경사각이
를 가지며, 상기 프리즘 어레이는 상기 제1 레이저를 스티어링 하기 위한 제1 프리즘 엘리먼트를 포함하되, 상기 제1 프리즘 엘리먼트의 굴절률이 n 이며, 상기 제1 프리즘 엘리먼트의 경사각이  인 경우 상기 제1 프리즘 엘리먼트의 경사각은
인 경우 상기 제1 프리즘 엘리먼트의 경사각은  를 만족하도록 형성될 수 있다.
를 만족하도록 형성될 수 있다.
일 실시예에 따른 레이저 출력 장치는 제1 빅셀 에미터 및 제2 빅셀 에미터를 포함하는 제1 빅셀 유닛을 포함하는 빅셀 어레이, 상기 빅셀 어레이로부터 출력된 레이저를 콜리메이션 하기 위한 마이크로 렌즈 어레이 및 상기 마이크로 렌즈 어레이로부터 콜리메이션 된 레이저를 스티어링하기 위한 프리즘 어레이를 포함하되, 상기 마이크로 렌즈 어레이는 상기 제1 빅셀 에미터에 대응되어 배치되는 제1 마이크로 렌즈 엘리먼트 및 상기 제2 빅셀 에미터에 대응되어 배치되는 제2 마이크로 렌즈 엘리먼트를 포함하며, 상기 마이크로 렌즈 어레이는 상기 제1 빅셀 유닛에 대응되어 배치되며, 상기 제1 마이크로 렌즈 엘리먼트 및 상기 제2 마이크로 렌즈 엘리먼트를 포함하는 제1 마이크로 렌즈 유닛을 포함하고, 상기 프리즘 어레이는 상기 제1 빅셀 유닛에 대응되어 배치되며 상기 제1 빅셀 유닛으로부터 출력된 레이저를 소정의 각도로 스티어링 하기 위한 제1 프리즘 엘리먼트를 포함하되, 상기 제1 빅셀 유닛의 직경은 상기 제1 마이크로 렌즈 유닛의 직경 보다 작으며, 상기 제1 마이크로 렌즈 유닛의 직경은 상기 제1 프리즘 엘리먼트의 한 변의 길이 보다 작을 수 있다.
일 실시예에 따른 라이다 장치는 레이저를 출력하기 위한 레이저 출력부, 상기 레이저 출력부로부터 출력된 레이저가 대상체에서 반사된 경우 반사된 레이저를 수광하는 디텍터부 및 상기 레이저 출력부, 상기 디텍터부의 동작을 제어하되, 상기 디텍터부에서 수광된 레이저를 기초로 상기 대상체와의 거리를 획득하는 제어부를 포함하되, 상기 레이저 출력부는 제1 빅셀 에미터 및 제2 빅셀 에미터를 포함하는 제1 빅셀 유닛 및 제3 빅셀 에미터 및 제4 빅셀 에미터를 포함하는 제2 빅셀 유닛을 포함하는 빅셀 어레이, 상기 빅셀 어레이로부터 출력된 레이저를 콜리메이션 하기 위한 콜리메이션 컴포넌트 및 상기 콜리메이션 컴포넌트로부터 콜리메이션 된 레이저를 스티어링 하기 위한 스티어링 컴포넌트를 포함하되, 상기 제1 빅셀 유닛 및 상기 제2 빅셀 유닛이 서로 독립적으로 동작되기 위하여 상기 제1 및 제2 빅셀 에미터는 제1 N-컨택 및 제1 P-컨택을 공유하고, 상기 제3 및 제4 빅셀 에미터는 제2 N-컨택 및 제2 P-컨택을 공유하며, 상기 제어부는 제1 시점에 제1 방향으로 레이저가 조사 되도록 상기 제1 N-컨택 및 상기 제1 P-컨택을 통전 시켜 상기 레이저 출력부를 동작 시키며, 제2 시점에 상기 제1 방향과 상이한 방향으로 레이저가 조사 되도록 상기 제2 N-컨택 및 상기 제2 P-컨택을 통전 시켜 상기 레이저 출력부를 동작시킬 수 있다.
일 실시예에 따른 라이다 장치는 레이저를 출력하는 복수개의 레이저 출력 소자를 포함하는 레이저 출력부, 상기 레이저 출력부로부터 출력된 레이저가 일 지점에서 반사된 경우 반사된 레이저를 수광하는 디텍터부를 포함하되, 상기 레이저 출력부는 제1 레이저 출력 소자 및 제2 레이저 출력 소자를 포함하고, 상기 제1 레이저 출력 소자로부터 출력되는 제1 레이저와 상기 제2 레이저 출력 소자로부터 출력되는 제2 레이저는 상기 라이다 장치로부터 제1 거리만큼 이격된 지점에서 각각 제1 광밀도(Light density) 및 제2 광밀도를 가지도록 출력되며, 상기 제1 레이저 출력 소자 및 상기 제2 레이저 출력소자사이의 거리에 따라서 상기 제1 레이저와 상기 제2 레이저가 상기 라이다 장치로부터 오버랩되는 거리가 결정 되되, 상기 제1 레이저 및 상기 제2 레이저가 상기 라이다 장치로부터 제2 거리만큼 이격된 지점에서 오버랩 되는 경우, 상기 제1 레이저 출력 소자 및 상기 제2 레이저 출력 소자 사이의 거리는 상기 제2 거리에서 상기 제1 및 제2 레이저가 오버랩 되는 영역의 광밀도가 상기 제1 광밀도 이하가 되고, 상기 라이다 장치로부터 거리가 멀어질수록 상기 제1 레이저와 상기 제2 레이저가 오버랩되는 영역의 크기가 커지며, 상기 라이다 장치로부터 100m 거리에서 상기 제1 레이저와 상기 제2 레이저가 오버랩되는 영역의 크기가 100m 거리에서 상기 제1 레이저의 조사 영역의 80%이상이 되도록 설정되며, 상기 제2 거리는 상기 제1 거리보다 멀 수 있다.
일 실시예에 따른 레이저 출력 디바이스는 적어도 하나 이상의 빅셀 에미터(VCSEL Emitter : Vertical Cavity surface Emitting Laser Emitter)를 포함하는 제1 빅셀 유닛(VCSEL Unit), 적어도 하나 이상의 빅셀 에미터를 포함하되, 상기 제1 빅셀 유닛으로부터 출력되는 제1 레이저의 스티어링 각도(Steering angle)와 상이한 스티어링 각도로 제2 레이저를 조사하는 제2 빅셀 유닛, 적어도 하나 이상의 빅셀 에미터를 포함하되, 상기 제2 레이저의 스티어링 각도와 상이하며, 상기 제1 레이저의 스티어링 각도와 동일한 스티어링 각도로 제3 레이저를 조사하는 제3 빅셀 유닛, 적어도 하나 이상의 빅셀 에미터를 포함하되, 상기 제1 및 제3 레이저의 스티어링 각도와 상이하며, 상기 제2 레이저의 스티어링 각도와 동일한 스티어링 각도로 제4 레이저를 조사하는 제4 빅셀 유닛 및 상기 제1, 제2, 제3 및 제4 빅셀 유닛의 동작을 제어하는 제어부를 포함하되, 상기 제어부는 제1 시점에 상기 제1 및 제3 레이저를 출력하도록 상기 제1 및 제3 빅셀 유닛을 동작시키되, 상기 제2 및 제4 빅셀 유닛을 오프시키고, 상기 제1 시점와 상이한 제2 시점에 상기 제2 및 제4 레이저를 출력하도록 상기 제2 및 제4 빅셀 유닛을 동작시키되, 상기 제1 및 제3 빅셀 유닛을 오프시키며, 상기 제1 및 제3 레이저가 상기 레이저 출력 디바이스로부터 일정거리 이상에서 오버랩되도록 상기 제1 및 제3 빅셀 유닛은 제1 거리 이상 이격되어 배치되고, 상기 제2 및 제4 레이저가 상기 레이저 출력 디바이스로부터 일정거리 이상에서 오버랩되도록 상기 제2 및 제4 빅셀 유닛은 제2 거리 이상 이격되어 배치되며, 상기 제1 및 제2 빅셀 유닛은 서로 인접하여 배치되도록 제3 거리 이하로 이격되어 배치되고, 상기 제1 및 제2 거리는 상기 제3 거리보다 클 수 있다.
다른 일 실시예에 따른 레이저 출력 디바이스는 적어도 하나 이상의 빅셀 에미터(VCSEL Emitter : Vertical Cavity surface Emitting Laser Emitter)를 포함하는 제1 빅셀 유닛(VCSEL Unit), 적어도 하나 이상의 빅셀 에미터를 포함하되, 상기 제1 빅셀 유닛으로부터 출력되는 제1 레이저의 스티어링 각도(Steering angle)와 상이한 스티어링 각도로 제2 레이저를 조사하는 제2 빅셀 유닛, 적어도 하나 이상의 빅셀 에미터를 포함하되, 상기 제2 레이저의 스티어링 각도와 상이하며, 상기 제1 레이저의 스티어링 각도와 동일한 스티어링 각도로 제3 레이저를 조사하는 제3 빅셀 유닛, 적어도 하나 이상의 빅셀 에미터를 포함하되, 상기 제1 및 제3 레이저의 스티어링 각도와 상이하며, 상기 제2 레이저의 스티어링 각도와 동일한 스티어링 각도로 제4 레이저를 조사하는 제4 빅셀 유닛 및 상기 제1, 제2, 제3 및 제4 빅셀 유닛의 동작을 제어하는 제어부를 포함하되, 상기 제어부는 제1 시점에 상기 제1 및 제3 레이저를 출력하도록 상기 제1 및 제3 빅셀 유닛을 동작시키되, 상기 제2 및 제4 빅셀 유닛을 오프시키고, 상기 제1 시점와 상이한 제2 시점에 상기 제2 및 제4 레이저를 출력하도록 상기 제2 및 제4 빅셀 유닛을 동작시키되, 상기 제1 및 제3 빅셀 유닛을 오프시키며, 상기 제1 및 제2 빅셀 유닛은 제1 빅셀 어레이(VCSEL Array)에 포함되며, 상기 제3 및 제4 빅셀 유닛은 제2 빅셀 어레이(VCSEL Array)에 포함되고, 상기 제1 및 제3 레이저가 일정 거리 이상에서 오버랩되되, 상기 레이저 출력 디바이스로부터 거리가 멀어질수록 상기 제1 및 제3 레이저가 오버랩되는 영역이 증가 하고, 상기 제2 및 제4 레이저가 일정 거리 이상에서 오버랩되되, 상기 레이저 출력 디바이스로부터 거리가 멀어질수록 상기 제2 및 제4 레이저가 오버랩되는 영역이 증가하도록 상기 제1 및 제2 빅셀 어레이는 동일 평면 상에서 이격되어 배치될 수 있다.
다른 일 실시예에 따른 라이다 장치는 적어도 하나 이상의 빅셀 에미터(VCSEL Emitter : Vertical Cavity surface Emitting Laser Emitter)를 포함하는 제1 빅셀 유닛(VCSEL Unit), 적어도 하나 이상의 빅셀 에미터를 포함하되, 상기 제1 빅셀 유닛으로부터 출력되는 제1 레이저의 스티어링 각도(Steering angle)와 상이한 스티어링 각도로 제2 레이저를 조사하는 제2 빅셀 유닛, 적어도 하나 이상의 빅셀 에미터를 포함하되, 상기 제2 레이저의 스티어링 각도와 상이하며, 상기 제1 레이저의 스티어링 각도와 동일한 스티어링 각도로 제3 레이저를 조사하는 제3 빅셀 유닛, 적어도 하나 이상의 빅셀 에미터를 포함하되, 상기 제1 및 제3 레이저의 스티어링 각도와 상이하며, 상기 제2 레이저의 스티어링 각도와 동일한 스티어링 각도로 제4 레이저를 조사하는 제4 빅셀 유닛, 상기 제1 내지 제4 레이저 중 적어도 일부의 레이저가 대상체로부터 반사된 경우 반사된 레이저를 수광하는 디텍터부, 상기 제1, 제2, 제3 및 제4 빅셀 유닛의 동작을 제어하되, 대상체로부터 반사된 레이저를 이용하여 대상체 대한 거리 정보를 획득하는 제어부를 포함하되, 상기 제어부는 제1 시점에 상기 제1 레이저를 출력하도록 상기 제1 빅셀 유닛을 동작시키며, 상기 제1 시점과 상이한 제2 시점에 상기 제2 레이저를 출력하도록 상기 제2 빅셀 유닛을 동작 시키고, 상기 제1 시점에 제1 대상체에 대한 거리 정보를 획득하지 못한 경우 상기 제어부는 제3 시점에 상기 제1 및 제3 레이저를 출력하도록 상기 제1 및 제3 빅셀 유닛을 동작시키며, 상기 제2 시점에 제2 대상체에 대한 거리 정보를 획득한 경우 상기 제어부는 제4 시점에 상기 제2 레이저를 출력하도록 상기 제2 빅셀 유닛을 동작시킬 수 있다.
일 실시예에 따른 적어도 하나 이상의 빅셀 에미터(VCSEL Emitter : Vertical Cavity surface Emitting Laser Emitter)를 포함하는 복수개의 빅셀 유닛(VCSEL Unit)으로부터 출력되는 레이저를 이용하여 대상체와의 거리 정보를 획득하는 라이다 장치의 거리 정보 획득 방법은 제1 시점에 제1 빅셀 유닛을 동작시켜 제1 레이저를 출력하는 단계, 상기 제1 시점과 상이한 제2 시점에 제2 빅셀 유닛을 동작시켜 상기 제1 레이저와 다른 각도로 제2 레이저를 출력하는 단계, 상기 제1 및 제2 시점과 상이한 제3 시점에 상기 제1 빅셀 유닛 및 제3 빅셀 유닛을 동작시켜 상기 제1 레이저와 동일한 각도로 조사되는 제3 레이저 및 상기 제1 레이저를 출력하는 단계, 상기 제3 시점에 조사된 상기 제1 및 제3 레이저가 제1 대상체에서 반사된 경우 상기 제1 대상체와 상기 라이다 장치 사이의 거리 정보를 획득하는 단계, 상기 제1 내지 제3 시점과 상이한 제4 시점에 상기 제2 빅셀 유닛을 동작시켜 상기 제2 레이저를 출력하는 단계 및 상기 제4 시점에 조사된 상기 제2 레이저가 제2 대상체에서 반사된 경우 상기 제2 대상체와 상기 라이다 장치 사이의 거리 정보를 획득하는 단계 를 포함하되, 상기 제3 시점에서 출력된 제1 및 제3 레이저에 기초하여 획득된 제1 대상체와의 거리 정보의 거리 값은 상기 제4 시점에서출력된 제2 레이저에 기초하여 획득된 제2 대상체와의 거리 정보의 거리 값 보다 클 수 있다.
일 실시예에 따른 자율 주행 차량은 차량 본체 및 대상체와의 거리를 측정하기 위한 라이다 장치를 포함하되, 상기 라이다 장치는 적어도 하나 이상의 빅셀 에미터(VCSEL Emitter : Vertical Cavity surface Emitting Laser Emitter)를 포함하는 제1 빅셀 유닛(VCSEL Unit), 적어도 하나 이상의 빅셀 에미터를 포함하되, 상기 제1 빅셀 유닛으로부터 출력되는 제1 레이저의 스티어링 각도(Steering angle)와 상이한 스티어링 각도로 제2 레이저를 조사하는 제2 빅셀 유닛, 적어도 하나 이상의 빅셀 에미터를 포함하되, 상기 제2 레이저의 스티어링 각도와 상이하며, 상기 제1 레이저의 스티어링 각도와 동일한 스티어링 각도로 제3 레이저를 조사하는 제3 빅셀 유닛, 적어도 하나 이상의 빅셀 에미터를 포함하되, 상기 제1 및 제3 레이저의 스티어링 각도와 상이하며, 상기 제2 레이저의 스티어링 각도와 동일한 스티어링 각도로 제4 레이저를 조사하는 제4 빅셀 유닛 및 상기 제1, 제2, 제3 및 제4 빅셀 유닛의 동작을 제어하는 제어부를 포함하되, 상기 제어부는 제1 시점에 상기 제1 및 제3 레이저를 출력하도록 상기 제1 및 제3 빅셀 유닛을 동작시키되, 상기 제2 및 제4 빅셀 유닛을 오프시키고, 상기 제1 시점와 상이한 제2 시점에 상기 제2 및 제4 레이저를 출력하도록 상기 제2 및 제4 빅셀 유닛을 동작시키되, 상기 제1 및 제3 빅셀 유닛을 오프시킬 수 있다.
본 발명의 과제의 해결 수단이 상술한 해결 수단들로 제한되는 것은 아니며, 언급되지 아니한 해결 수단들은 본 명세서 및 첨부된 도면으로부터 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자에게 명확하게 이해될 수 있을 것이다.
본 발명에 따르면 레이저 빔 출력 효율을 향상시킬 수 있는 빅셀 어레이가 제공될 수 있다.
본 발명에 따르면 빅셀 유닛들의 효율적인 동작을 위한 구조를 가지는 빅셀 어레이가 제공될 수 있다.
본 발명에 따르면 웨이퍼 내에서 효율적인 수율을 가질 수 있도록 배치된 빅셀 어레이가 제공될 수 있다.
본 발명에 따르면 솔리드 스테이트 라이다(Solid-state LiDAR) 장치에 포함되는 레이저 출력 장치가 제공될 수 있다.
본 발명에 따르면 솔리드 스테이트 라이다(Solid-state LiDAR) 장치에 포함되는 레이저 출력 장치에 이용되는 스티어링 컴포넌트가 제공될 수 있다.
본 발명에 따르면 솔리드 스테이트 라이다(Solid-state LiDAR) 장치가 제공될 수 있다.
본 발명에 따르면 사람의 눈 건강에 영향을 미치지 않으면서 측정거리를 향상시킬 수 있는 라이다 장치가 제공될 수 있다.
본 발명에 따르면 사람의 눈 건강에 영향을 미치지 않으면서 측정거리를 향상시킬 수 있는 레이저 출력 디바이스가 제공될 수 있다.
본 발명에 따르면 레이저가 조사되지 않는 영역을 최소화 하여 감지되지 않는 대상체를 최소화 하기 위한 라이다 장치가 제공될 수 있다.
본 발명의 효과들이 상술한 효과들로 제한되는 것은 아니며, 언급되지 아니한 효과들은 본 명세서 및 첨부된 도면으로부터 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자에게 명확하게 이해될 수 있을 것이다.
도 1은 일 실시예에 따른 라이다 장치를 설명하기 위한 도면이다.
도 2는 일 실시예에 따른 라이다 장치를 나타낸 도면이다.
도 3은 일 실시예에 따른 레이저 출력부를 나타낸 도면이다.
도 4는 일 실시예에 따른 VCSEL unit을 나타낸 도면이다.
도 5는 일 실시예에 따른 VCSEL array를 나타낸 도면이다.
도 6은 일 실시예에 따른 VCSEL array 및 메탈 컨택을 나타낸 측면도이다.
도 7은 일 실시예에 따른 VCSEL array를 나타낸 도면이다.
도 8은 일 실시예에 따른 라이다 장치를 설명하기 위한 도면이다.
도 9는 일 실시예에 따른 콜리메이션 컴포넌트를 설명하기 위한 도면이다.
도 10은 일 실시예에 따른 콜리메이션 컴포넌트를 설명하기 위한 도면이다.
도 11은 일 실시예에 따른 콜리메이션 컴포넌트를 설명하기 위한 도면이다.
도 12는 일 실시예에 따른 콜리메이션 컴포넌트를 설명하기 위한 도면이다.
도 13은 일 실시예에 따른 스티어링 컴포넌트를 설명하기 위한 도면이다.
도 14 및 도 15는 일 실시예에 따른 스티어링 컴포넌트를 설명하기 위한 도면이다.
도 16은 일 실시예에 따른 스티어링 컴포넌트를 설명하기 위한 도면이다.
도 17은 일 실시예에 따른 스티어링 컴포넌트를 설명하기 위한 도면이다.
도 18은 일 실시예에 따른 메타표면을 설명하기 위한 도면이다.
도 19는 일 실시예에 따른 메타표면을 설명하기 위한 도면이다.
도 20은 일 실시예에 따른 메타표면을 설명하기 위한 도면이다.
도 21은 일 실시예에 따른 옵틱부를 설명하기 위한 도면이다.
도 22는 일 실시예에 따른 옵틱부를 설명하기 위한 도면이다.
도 23은 일 실시예에 따른 메타 컴포넌트를 설명하기 위한 도면이다.
도 24는 다른 일 실시예에 따른 메타 컴포넌트를 설명하기 위한 도면이다.
도 25는 일 실시예에 따른 빅셀 모듈을 나타내는 도면이다.
도 26은 일 실시예에 따른 레이저 출력부를 나타내는 도면이다.
도 27내지 도 29는 일 실시예에 따른 빅셀 모듈을 나타내는 도면이다.
도 30 내지 도 31은 일 실시예에 따른 빅셀 모듈의 수평 FOV를 위에서 바라본 도면이다.
도 32 내지 도 34는 일 실시예에 따른 빅셀 모듈의 수평 FOV를 정면에서 바라본 도면이다.
도 35는 일 실시예에 따른 라이다 장치를 나타내는 도면이다.
도 36 내지 도 37은 다른 일 실시예에 따른 빅셀 모듈을 나타내는 도면이다.
도 40은 다른 일 실시예에 따른 라이다 장치를 나타내는 도면이다.
도 41 내지 도 42는 일 실시예에 따른 레이저 출력부를 나타내는 도면이다.
도 43은 일 실시예에 따른 빅셀 모듈간의 거리 측정 기준점을 나타내는 도면이다.
도 44는 다른 일 실시예에 따른 빅셀 모듈간의 거리 측정 기준점을 나타내는 도면이다.
도 45 내지 도 47는 또 다른 일 실시예에 따른 빅셀 모듈간의 거리 측정 기준점을 나타내는 도면이다.
도 48 내지 도 50은 일 실시예에 따른 빅셀 모듈 내의 거리 측정 기준점을 나타내는 도면이다.
도 51 내지 도 52은 다른 일 실시예에 따른 빅셀 모듈 내의 거리 측정 기준점을 나타내는 도면이다.
도 53 내지 도 54은 또 다른 일 실시예에 따른 빅셀 모듈 내의 거리 측정 기준점을 나타내는 도면이다.
도 55은 일 실시예에 따른 빅셀 어레이를 위에서 본 모습을 나타내는 도면이다.
도 56는 다른 일 실시예에 따른 빅셀 어레이를 위에서 본 모습을 나타내는 도면이다.
도 57 내지 도 58은 일 실시예에 따른 라이다 장치를 나타내는 도면이다.
도 59 내지 도 60은 다른 일 실시예에 따른 라이다 장치를 나타내는 도면이다.
도 61은 일 실시예에 따른 빅셀 이미터의 단면도를 나타내는 도면이다.
도 62는 다른 일 실시예에 따른 빅셀 이미터를 나타내는 도면이다.
도 63은 다른 일 실시예에 따른 빅셀 이미터의 단면도를 나타내는 도면이다.
도 64는 또 다른 일 실시예에 따른 빅셀 이미터의 단면도를 나타내는 도면이다.
도 65는 일 실시예에 따른 상부 메탈 컨택 및 리플렉터를 나타내는 도면이다.
도 66은 다른 일 실시예에 따른 빅셀 이미터의 단면도를 나타내는 도면이다.
도 67은 다른 일 실시예에 따른 상부 메탈 컨택 및 리플렉터를 나타내는 도면이다.
도 68은 또 다른 일 실시예에 따른 빅셀 이미터의 단면도를 나타내는 도면이다.
도 69는 또 다른 일 실시예에 따른 상부 메탈 컨택 및 리플렉터를 나타내는 도면이다.
도 70은 일 실시예에 따른 바텀 이미팅 빅셀 이미터의 단면도를 나타내는 도면이다.
도 71은 다른 일 실시예에 따른 바텀 이미팅 빅셀 이미터의 단면도를 나타내는 도면이다.
도 72는 일 실시예에 따른 빅셀 어레이를 설명하기 위한 도면이다.
도 73은 다른 일 실시예에 따른 빅셀 어레이를 설명하기 위한 도면이다.
도 74 내지 도 77은 일 실시예에 따른 빅셀 유닛의 저항을 설명하기 위한 도면이다.
도 78 내지 도 81은 다른 일 실시예에 따른 빅셀 유닛의 저항을 설명하기 위한 도면이다.
도 82는 일 방향에서 본 빅셀 어레이를 나타낸 도면이다.
도 83은 다른 일 방향에서 본 빅셀 어레이를 나타낸 도면이다.
도 84는 또 다른 실시예에 따른 빅셀 어레이를 설명하기 위한 도면이다.
도 85는 일 방향에서 본 또 다른 실시예에 따른 빅셀 어레이를 나타낸 도면이다.
도 86은 일 실시예에 따른 빅셀 어레이를 설명하기 위한 도면이다.
도 87은 다른 일 실시예에 따른 빅셀 어레이를 설명하기 위한 도면이다.
도 88은 일 실시예에 따른 빅셀 어레이의 연결 상태 및 단면도를 나타낸 도면이다.
도 89는 다른 일 실시예에 따른 빅셀 어레이의 연결 상태 및 단면도를 나타낸 도면이다.
도 90은 일 실시예에 따른 빅셀 어레이를 나타낸 회로도이다.
도 91 내지 도 97은 빅셀 어레이의 다양한 실시예를 나타낸 도면이다.
도 98은 일 실시예에 따른 빅셀 어레이의 동작 순서도를 나타낸 도면이다.
도 99는 일 실시예에 따른 빅셀 어레이의 동작 시퀀스를 나타낸 도면이다.
도 100은 일 실시예에 따른 빅셀 어레이가 포함된 웨이퍼를 나타낸 도면이다.
도 101은 일 실시예에 따른 웨이퍼 및 빅셀 어레이의 레이아웃을 나타낸 도면이다.
도 102는 다른 일 실시예에 따른 웨이퍼 및 빅셀 어레이의 레이아웃을 나타낸 도면이다.
도 103 내지 105는 일 실시예에 따른 라이다 장치의 측정 거리를 설명하기 위한 도면이다.
도 106은 라이다 장치의 Eye-safety에 대하여 설명하기 위한 도면이다.
도 107 및 도 108은 일 실시예에 따른 레이저의 다이버전스를 설명하기 위한 도면이다.
도 109는 일 실시예에 따른 레이저의 프로파일을 이용하여 다이버전스 각도를 설명하기 위한 도면이다.
도 110 및 도 111은 일 실시예에 따른 복수개의 레이저 출력 소자를 포함하는 레이저 출력부를 설명하기 위한 도면이다.
도 112는 일 실시예에 따른 레이저의 다이버전스에 따른 오버랩 거리를 설명하기 위한 도면이다.
도 113은 레이저 출력 소자 사이의 거리에 따른 레이저의 오버랩 거리를 설명하기 위한 도면이다.
도 114는 레이저 출력 소자 사이의 거리와 오버랩 거리와의 상관 관계를 다이버전스 각도 별로 표현한 그래프이다.
도 115는 Eye-safety 기준을 설명하기 위한 도면이다.
도 116은 일 실시예에 따른 레이저 출력부의 기준거리와 오버랩 거리를 설명하기 위한 도면이다.
도 117은 레이저 출력 소자로부터 출력된 레이저의 광 밀도와 레이저 출력 소자로부터의 거리 사이의 상관 관계를 다이버전스 각도 별로 표현한 그래프이다.
도 118은 일 실시예에 따른 레이저 출력부의 기준 거리와 오버랩 거리를 설명하기 위한 도면이다.
도 119는 일 실시예에 따른 라이다 장치의 향상된 측정 거리를 설명하기 위한 도면이다.
도 120는 일 실시예에 따른 레이저 출력부를 설명하기 위한 도면이다.
도 121은 일 실시예에 따른 레이저 출력부를 설명하기 위한 도면이다.
도 122는 일 실시예에 따른 레이저 출력부를 설명하기 위한 도면이다.
도 123은 일 실시예에 따른 레이저 출력부의 배치 관계를 설명하기 위한 도면이다.
도 124은 다른 일 실시예에 따른 레이저 출력부의 배치 관계를 설명하기 위한 도면이다.
도 125는 일 실시예에 따른 일정 이하의 다이버전스 각도를 가지는 레이저 및 이를 출력하는 레이저 출력부에 관한 도면이다.
도 126은 도 125에 따른 레이저 사이의 거리를 설명하기 위한 도면이다.
도 127은 일 실시예에 따른 일정 이상의 다이버전스 각도를 가지는 레이저 및 이를 출력하는 레이저 출력부에 관한 도면이다.
도 128은 도 127에 따른 레이저 사이의 거리를 설명하기 위한 도면이다.
도 129는 일 실시예에 따른 레이저 출력부에 대해 설명하기 위한 도면이다.
도 130은 일 실시예에 따른 레이저 출력부에 대해 설명하기 위한 도면이다.
도 131은 일 실시예에 따른 레이저 출력부에 대해 설명하기 위한 도면이다.
도 132는 일 실시예에 따른 레이저 출력부의 구성에 대하여 설명하기 위한 도면이다.
도 133은 일 실시예에 따른 레이저 출력부의 구성에 대하여 설명하기 위한 도면이다.
도 134는 일 실시예에 따른 레이저 출력부의 구성에 대하여 설명하기 위한 도면이다.
도 135는 일 실시예에 따른 레이저 출력부의 구성에 대하여 설명하기 위한 도면이다.
도 136은 일 실시예에 따른 레이저 출력부의 구성에 대하여 설명하기 위한 도면이다.
도 137은 일 실시예에 따른 레이저 출력부에 대하여 설명하기 위한 도면이다.
도 138은 일 실시예에 따른 레이저 출력부의 구성에 대하여 설명하기 위한 도면이다.
도 139는 일 실시예에 따른 레이저 출력부의 구성에 대하여 설명하기 위한 도면이다.
도 140은 일 실시예에 따른 스티어링 컴포넌트를 설명하기 위한 도면이다.
도 141은 일 실시예에 따른 스티어링 컴포넌트를 설명하기 위한 도면이다.
도 142는 일 실시예에 따른 스티어링 컴포넌트를 설명하기 위한 도면이다.
도 143은 일 실시예에 따른 레이저 출력부의 구성에 대하여 설명하기 위한 도면이다.
도 144는 일 실시예에 따른 레이저 출력부의 구성에 대하여 설명하기 위한 도면이다.
본 명세서에 기재된 실시예는 본 발명이 속하는 기술 분양에서 통상의 지식을 가진 자에게 본 발명의 사상을 명확히 설명하기 위한 것이므로, 본 발명이 본 명세서에 기재된 실시예에 한정되는 것은 아니며, 본 발명의 범위는 본 발명의 사상을 벗어나지 아니하는 수정예 또는 변형예를 포함하는 것으로 해석되어야 한다.
본 명세서에서 사용되는 용어는 본 발명에서의 기능을 고려하여 가능한 현재 널리 사용되고 있는 일반적인 용어를 선택하였으나 이는 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자의 의도, 판례 또는 새로운 기술의 출현 등에 따라 달라질 수 있다. 다만, 이와 달리 특정한 용어를 임의의 의미로 정의하여 사용하는 경우에는 그 용어의 의미에 관하여 별도로 기재할 것이다. 따라서 본 명세서에서 사용되는 용어는 단순한 용어의 명칭이 아닌 그 용어가 가진 실질적인 의미와 본 명세서의 전반에 걸친 내용을 토대로 해석되어야 한다.
본 명세서에 첨부된 도면은 본 발명을 용이하게 설명하기 위한 것으로 도면에 도시된 형상은 본 발명의 이해를 돕기 위하여 필요에 따라 과장되어 표시된 것일 수 있으므로 본 발명이 도면에 의해 한정되는 것은 아니다.
본 명세서에서 본 발명에 관련된 공지의 구성 도는 기능에 대한 구체적인 설명이 본 발명의 요지를 흐릴 수 있다고 판단되는 경우에 이에 관한 자세한 설명은 필요에 따라 생략하기로 한다.
일 실시예에 따르면, 대상체를 향해 레이저를 조사하는 레이저 출력부, 및 상기 레이저 출력부에서 조사된 레이저가 상기 대상체에 반사되어 되돌아오는 레이저를 수광하는 레이저 수광부를 포함하고, 상기 레이저 출력부는 바디의 제1 면 상에 배치되고, 상기 레이저 출력부는 제1 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 어레이 및 제2 빅셀 어레이를 포함하고, 상기 제1 빅셀 어레이는 레이저 빔을 제1 방향으로 출력하는 제1 빅셀 유닛 및 레이저 빔을 제2 방향으로 출력하는 제2 빅셀 유닛을 포함하고, 상기 제2 빅셀 어레이는 레이저 빔을 상기 제1 방향으로 출력하는 제3 빅셀 유닛을 포함하고, 상기 제1 빅셀 유닛과 상기 제2 빅셀 유닛은 제1 간격을 가지고 배치되고, 상기 제1 빅셀 유닛과 상기 제3 빅셀 유닛의 간격은 상기 제1 간격 이하인 라이다 장치가 제공될 수 있다.
여기서, 상기 제1 방향은 상기 제1 면과 수직일 수 있다.
여기서, 상기 제2 빅셀 유닛은 상기 제1 빅셀 유닛과 인접할 수 있다.
여기서, 상기 제3 빅셀 유닛은 상기 제1 빅셀 유닛과 인접할 수 있다.
여기서, 상기 제1 빅셀 유닛은 상기 제1 빅셀 어레이의 최외곽에 배치되고, 상기 제3 빅셀 유닛은 상기 제2 빅셀 어레이의 최외곽에 배치될 수 있다.
여기서, 상기 레이저 출력부는 복수의 옵틱(optic)을 포함하고, 상기 복수의 옵틱 중 제1 옵틱은 레이저 빔을 콜리메이션(collimation)시키고, 상기 복수의 옵틱 중 제2 옵틱은 레이저 빔을 일 방향으로 스티어링(steering)시킬 수 있다.
여기서, 상기 제1 옵틱은 상기 레이저 출력부 중 레이저 출력 소자로부터 레이저 빔이 출력되는 방향에 배치되고, 상기 제2 옵틱은 상기 제1 옵틱으로부터 레이저 빔이 출력되는 방향에 배치될 수 있다.
여기서, 상기 제1 빅셀 어레이는 복수의 빅셀 이미터(emitter)를 포함하고, 상기 제1 옵틱은 복수의 서브 옵틱을 포함하고, 상기 복수의 빅셀 이미터 중 제1 빅셀 이미터와 상기 복수의 서브 옵틱 중 제1 서브 옵틱이 서로 대응될 수 있다.
여기서, 상기 제1 빅셀 어레이는 복수의 빅셀 이미터(emitter)를 포함하는 복수의 빅셀 유닛(unit)을 포함하고, 상기 제2 옵틱은 복수의 서브 옵틱을 포함하고, 상기 복수의 빅셀 유닛 중 제1 빅셀 유닛과 상기 복수의 서브 옵틱 중 제1 서브 옵틱이 서로 대응될 수 있다.
여기서, 상기 제1 옵틱은 렌즈(lens), 마이크로 렌즈(microlens), 마이크로 렌즈 어레이(microlens array) 및 메타 표면(metasurface) 중 적어도 하나일 수 있다.
여기서, 상기 제2 옵틱은 렌즈(lens), 마이크로 렌즈(microlens), 마이크로 렌즈 어레이(microlens array), 프리즘(prism), 마이크로 프리즘(microprism), 마이크로 프리즘 어레이(microprism array) 및 메타 표면(metasurfa) 중 적어도 하나일 수 있다.
여기서, 상기 바디를 복수 개 포함하는 메인 바디를 포함하고, 상기 메인 바디의 수평 FOV(horizontal Field Of View)는 상기 복수 개의 제1 바디의 수평 FOV의 합일 수 있다.
여기서, 상기 바디를 복수 개 포함하는 메인 바디를 포함하고, 상기 메인 바디의 수평 FOV(horizontal Field Of View)는 상기 바디의 수평 FOV, 상기 제1 빅셀 어레이와 상기 제2 빅셀 어레이의 스티어링 각도 및 상기 레이저 출력부로부터 출력되는 레이저 빔의 다이버전스(divergence)에 기초하여 정의될 수 있다.
일 실시예에 따르면, 일 실시예에 따른 라이다 장치는 대상체를 향해 레이저를 조사하는 레이저 출력부, 및 상기 레이저 출력부에서 조사된 레이저가 상기 대상체에 반사되어 되돌아오는 레이저를 수광하는 레이저 수광부를 포함하고, 상기 레이저 출력부는 바디의 제1 면 상에 배치되고, 상기 레이저 출력부는 제1 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 어레이를 포함하고, 상기 레이저 출력부는 상기 제1 빅셀 어레이로부터 출력되는 레이저 빔을 콜리메이션 시키는 제1 옵틱 및 상기 제1 빅셀 어레이 및 상기 제2 빅셀 어레이로부터 출력되는 레이저 빔을 스티어링 시키는 제2 옵틱을 포함하고, 상기 제1 빅셀 어레이는 제1 빅셀 유닛 및 제2 빅셀 유닛을 포함하고, 상기 제1 빅셀 유닛은 제1 각도의 다이버전스 각도를 가지는 레이저를 출력하고, 상기 제2 빅셀 유닛은 제2 각도의 다이버전스 각도를 가지는 레이저를 출력하고, 상기 제2 옵틱에 포함되는 제1 서브 옵틱은 상기 제1 빅셀 유닛으로부터 출력되는 레이저 빔을 제1 방향으로 스티어링 시키고, 상기 제2 옵틱에 포함되는 제2 서브 옵틱은 상기 제2 빅셀 유닛으로부터 출력되는 레이저 빔을 제2 방향으로 스티어링 시키고, 상기 제1 빅셀 유닛으로부터 출력되는 레이저 빔과 상기 제2 빅셀 유닛으로부터 출력되는 레이저 빔 사이에 상기 레이저 출력부로부터 레이저가 조사되지 않는 영역이 발생되지 않도록, 상기 제1 방향과 상기 제2 방향이 이루는 각도는 상기 제1 각도와 상기 제2 각도의 합의 절반 이하인 라이다 장치가 제공될 수 있다.
여기서, 상기 제1 각도와 상기 제2 각도는 동일할 수 있다.
여기서, 상기 제2 빅셀 유닛은 상기 제1 빅셀 유닛과 인접할 수 있다.
여기서, 상기 제1 옵틱은 상기 레이저 출력부 중 레이저 출력 소자로부터 레이저 빔이 출력되는 방향에 배치되고, 상기 제2 옵틱은 상기 제1 옵틱으로부터 레이저 빔이 출력되는 방향에 배치될 수 있다.
여기서, 상기 제1 빅셀 어레이는 복수의 빅셀 이미터(emitter)를 포함하고, 상기 제1 옵틱은 복수의 서브 옵틱을 포함하고, 상기 복수의 빅셀 이미터 중 제1 빅셀 이미터와 상기 복수의 서브 옵틱 중 제3 서브 옵틱이 서로 대응될 수 있다.
여기서, 상기 제1 옵틱은 복수의 서브 옵틱을 포함하고, 상기 제1 빅셀 유닛과 상기 복수의 서브 옵틱 중 제3 서브 옵틱이 서로 대응될 수 있다.
여기서, 상기 제1 빅셀 유닛과 상기 제1 서브 옵틱이 서로 대응될 수 있다.
여기서, 상기 제1 옵틱은 렌즈(lens), 마이크로 렌즈(microlens), 마이크로 렌즈 어레이(microlens array) 및 메타 표면(metasurface) 중 적어도 하나일 수 있다.
여기서, 상기 제2 옵틱은 렌즈(lens), 마이크로 렌즈(microlens), 마이크로 렌즈 어레이(microlens array), 프리즘(prism), 마이크로 프리즘(microprism), 마이크로 프리즘 어레이(microprism array) 및 메타 표면(metasurfa) 중 적어도 하나일 수 있다.
여기서, 상기 바디를 복수 개 포함하는 메인 바디를 포함하고, 상기 메인 바디의 수평 FOV(horizontal Field Of View)는 상기 복수 개의 제1 바디의 수평 FOV의 합일 수 있다.
여기서, 상기 메인 바디의 수평 FOV(horizontal Field Of View)는 상기 바디에 포함된 상기 레이저 출력부로부터 출력되는 레이저 빔의 스티어링 각도 및 다이버전스(divergence)에 기초하여 정의될 수 있다.
여기서, 상기 레이저 출력부는 제2 빅셀 어레이를 포함하고, 상기 제1 옵틱은 상기 제2 빅셀 어레이로부터 출력되는 레이저 빔을 콜리메이션 시키고, 상기 제2 옵틱은 상기 제2 빅셀 어레이로부터 출력되는 레이저 빔을 스티어링 시키고, 상기 제2 빅셀 어레이는 제3 각도의 다이버전스 각도를 가지는 레이저를 출력하는 제3 빅셀 유닛을 포함하고, 상기 제2 옵틱에 포함되는 제3 서브 옵틱은 상기 제3 빅셀 유닛으로부터 출력되는 레이저 빔을 제3 방향으로 스티어링 시키고, 상기 제1 빅셀 유닛으로부터 출력되는 레이저 빔과 상기 제3 빅셀 유닛으로부터 출력되는 레이저 빔 사이에 상기 레이저 출력부로부터 레이저가 조사되지 않는 영역이 발생되지 않도록, 상기 제1 방향과 상기 제3 방향이 이루는 각도는 상기 제1 각도와 상기 제3 각도의 합의 절반 이하일 수 있다.
여기서, 상기 제1 방향과 상기 제3 방향은 상기 제1 면과 수직인 제2 면에 대하여 대칭일 수 있다.
여기서, 상기 제1 빅셀 유닛과 상기 제2 빅셀 유닛은 제1 간격을 가지고 배치되고, 상기 제1 빅셀 유닛과 상기 제3 빅셀 유닛의 간격은 상기 제1 간격 이하일 수 있다.
여기서, 상기 제3 빅셀 유닛은 상기 제1 빅셀 유닛과 인접할 수 있다.
여기서, 상기 제1 빅셀 유닛은 상기 제1 빅셀 어레이의 최외곽에 배치되고, 상기 제3 빅셀 유닛은 상기 제2 빅셀 어레이의 최외곽에 배치될 수 있다.
일 실시예에 따르면, 대상체를 향해 레이저를 조사하는 레이저 출력부를 포함하고, 상기 레이저 출력부는 바디의 제1 면 상에 배치되고, 상기 레이저 출력부는 제1 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 어레이 및 제2 빅셀 어레이를 포함하고, 상기 제1 빅셀 어레이는 레이저 빔을 제1 방향으로 출력하는 제1 빅셀 유닛 및 레이저 빔을 제2 방향으로 출력하는 제2 빅셀 유닛을 포함하고, 상기 제2 빅셀 어레이는 레이저 빔을 상기 제1 방향으로 출력하는 제3 빅셀 유닛을 포함하고, 상기 제1 빅셀 유닛과 상기 제2 빅셀 유닛은 제1 간격을 가지고 배치되고, 상기 제1 빅셀 유닛과 상기 제3 빅셀 유닛의 간격은 상기 제1 간격 이하인 레이저 출력 장치가 제공될 수 있다.
일 실시예에 따르면, 대상체를 향해 레이저를 조사하는 레이저 출력부를 포함하고, 상기 레이저 출력부는 바디의 제1 면 상에 배치되고, 상기 레이저 출력부는 제1 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 어레이를 포함하고, 상기 레이저 출력부는 상기 제1 빅셀 어레이로부터 출력되는 레이저 빔을 콜리메이션 시키는 제1 옵틱 및 상기 제1 빅셀 어레이 및 상기 제2 빅셀 어레이로부터 출력되는 레이저 빔을 스티어링 시키는 제2 옵틱을 포함하고, 상기 제1 빅셀 어레이는 제1 빅셀 유닛 및 제2 빅셀 유닛을 포함하고, 상기 제1 빅셀 유닛은 제1 각도의 다이버전스 각도를 가지는 레이저를 출력하고, 상기 제2 빅셀 유닛은 제2 각도의 다이버전스 각도를 가지는 레이저를 출력하고, 상기 제2 옵틱에 포함되는 제1 서브 옵틱은 상기 제1 빅셀 유닛으로부터 출력되는 레이저 빔을 제1 방향으로 스티어링 시키고, 상기 제2 옵틱에 포함되는 제2 서브 옵틱은 상기 제2 빅셀 유닛으로부터 출력되는 레이저 빔을 제2 방향으로 스티어링 시키고, 상기 제1 빅셀 유닛으로부터 출력되는 레이저 빔과 상기 제2 빅셀 유닛으로부터 출력되는 레이저 빔 사이에 상기 레이저 출력부로부터 레이저가 조사되지 않는 영역이 발생되지 않도록, 상기 제1 방향과 상기 제2 방향이 이루는 각도는 상기 제1 각도와 상기 제2 각도의 합의 절반 이하인 레이저 출력 장치가 제공될 수 있다.
일 실시예에 따르면, 대상체를 향해 레이저를 조사하는 레이저 출력부, 및 상기 레이저 출력부에서 조사된 레이저가 상기 대상체에 반사되어 되돌아오는 레이저를 수광하는 레이저 수광부를 포함하고, 상기 레이저 출력부는 제1 면을 갖는 바디 상에 배치되며, 상기 레이저 출력부는 제1 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 어레이 및 제2 빅셀 어레이를 포함하고, 상기 제1 빅셀 어레이는 레이저 빔을 출력하여 제1 수평 FOV(Horizontal Field Of View)를 형성하고, 상기 제2 빅셀 어레이는 레이저 빔을 출력하여 제2 수평 FOV를 형성하고, 상기 제1 수평 FOV와 상기 제2 수평 FOV는 상기 제1 축 -상기 제1 축은 상기 제1 면의 수평축을 나타냄- 을 기준으로 제1 영역에 오버랩되고, 상기 제1 영역은 상기 제1 수평 FOV 중 상기 제1 빅셀 어레이가 상기 제1 면과 수직인 방향으로 레이저 빔을 출력하여 형성되는 FOV 및 상기 제2 수평 FOV 중 상기 제2 빅셀 어레이가 상기 제1 면과 수직인 방향으로 레이저 빔을 출력하여 형성되는 FOV를 포함하는 라이다 장치가 제공될 수 있다.
여기서, 상기 제1 수평 FOV 및 상기 제2 수평 FOV의 조사 각도는 동일할 수 있다.
여기서, 상기 레이저 출력부의 수평 FOV는 상기 제1 수평 FOV 및 상기 제2 수평 FOV의 합일 수 있다.
여기서, 상기 제1 빅셀 어레이는 레이저 빔을 출력하여 제1 수직 FOV(Vertical Field Of View)를 형성하고, 상기 제2 빅셀 어레이는 레이저 빔을 출력하여 제2 수직 FOV를 형성하고, 상기 제1 수직 FOV 및 상기 제2 수직 FOV의 조사 각도는 동일할 수 있다.
여기서, 상기 제1 빅셀 어레이의 레이저 빔 조사 방향과 상기 제2 빅셀 어레이의 레이저 빔 조사 방향은 상기 제1 축과 직교하는 제2 축을 기준으로 서로 대칭일 수 있다.
여기서, 상기 제1 빅셀 어레이의 레이저 빔 조사 방향과 상기 제2 빅셀 어레이의 레이저 빔 조사 방향은 상기 제1 면과 수직인 가상의 제2 면을 기준으로 서로 대칭일 수 있다.
여기서, 상기 레이저 출력부는 복수의 옵틱(optic)을 포함하고, 상기 복수의 옵틱 중 제1 옵틱은 레이저 빔을 콜리메이션(collimation)시키고, 상기 복수의 옵틱 중 제2 옵틱은 레이저 빔을 일 방향으로 스티어링(steering)시킬 수 있다.
여기서, 상기 제1 옵틱은 상기 레이저 출력부 중 레이저 출력 소자로부터 레이저 빔이 출력되는 방향에 배치되고, 상기 제2 옵틱은 상기 제1 옵틱으로부터 레이저 빔이 출력되는 방향에 배치될 수 있다.
여기서, 상기 제1 빅셀 어레이는 복수의 빅셀 이미터(emitter)를 포함하고, 상기 제1 옵틱은 복수의 서브 옵틱을 포함하고, 상기 복수의 빅셀 이미터 중 제1 빅셀 이미터와 상기 복수의 서브 옵틱 중 제1 서브 옵틱이 서로 대응될 수 있다.
여기서, 상기 제1 빅셀 어레이는 복수의 빅셀 이미터(emitter)를 포함하는 복수의 빅셀 유닛(unit)을 포함하고, 상기 제2 옵틱은 복수의 서브 옵틱을 포함하고, 상기 복수의 빅셀 유닛 중 제1 빅셀 유닛과 상기 복수의 서브 옵틱 중 제1 서브 옵틱이 서로 대응될 수 있다.
여기서, 상기 제1 옵틱은 렌즈(lens), 마이크로 렌즈(microlens), 마이크로 렌즈 어레이(microlens array) 및 메타 표면(metasurface) 중 적어도 하나일 수 있다.
여기서, 상기 제2 옵틱은 렌즈(lens), 마이크로 렌즈(microlens), 마이크로 렌즈 어레이(microlens array), 프리즘(prism), 마이크로 프리즘(microprism), 마이크로 프리즘 어레이(microprism array) 및 메타 표면(metasurfa) 중 적어도 하나일 수 있다.
여기서, 상기 제1 수평 FOV는 최외곽 레이저 빔 중 상기 제1 축을 기준으로 레이저 빔의 중심의 위치값이 큰 레이저 빔인 제1 레이저 빔을 포함하고, 상기 제2 수평 FOV는 최외곽 레이저 빔 중 상기 제1 축을 기준으로 레이저 빔의 중심의 위치값이 작은 레이저 빔인 제2 레이저 빔을 포함하고, 상기 제1 레이저 빔의 중심 및 상기 제2 레이저 빔의 중심의 진행 방향은 동일할 수 있다.
여기서, 상기 제1 레이저 빔의 중심 및 상기 제2 레이저 빔의 중심의 진행 방향은 상기 제1 면에 수직일 수 있다.
여기서, 상기 제1 수평 FOV는 상기 제2 수평 FOV와 오버랩되지 않는 제2 영역을 포함하고, 상기 제2 수평 FOV는 상기 제1 수평 FOV와 오버랩되지 않는 제3 영역을 포함하고, 상기 제2 영역 및 상기 제3 영역의 조사 각도는 같을 수 있다.
여기서, 상기 제1 수평 FOV의 각도는 30도일 수 있다.
여기서, 상기 바디를 복수 개 포함하는 메인 바디를 포함하고, 상기 메인 바디의 수평 FOV(horizontal Field Of View)는 상기 복수 개의 제1 바디의 수평 FOV의 합일 수 있다.
여기서, 상기 바디를 복수 개 포함하는 메인 바디를 포함하고, 상기 메인 바디의 수평 FOV(horizontal Field Of View)는 상기 바디의 수평 FOV, 상기 제1 빅셀 어레이와 상기 제2 빅셀 어레이의 스티어링 각도 및 상기 레이저 출력부로부터 출력되는 레이저 빔의 다이버전스(divergence)에 기초하여 정의될 수 있다.
다른 일 실시예에 따르면, 레이저 출력부, 레이저 수광부 및 컨트롤러를 포함하는 라이다 장치를 이용한 거리 산출 방법으로, 상기 레이저 출력부 중 제1 레이저 출력부가 레이저 빔을 출력하는 단계, 상기 제1 레이저 출력부가 레이저 빔을 출력하는 출광 시점을 획득하는 단계, 상기 수광부가 상기 출력된 레이저 빔 중 대상체로부터 반사되는 레이저 빔을 수광하는 단계, 상기 수광되는 레이저 빔의 수광 시점을 획득하는 단계, 상기 출광 시점 및 상기 수광 시점에 기초하여 상기 수광되는 레이저 빔의 비행 거리를 산출하는 단계, 및 상기 비행 거리에 기초하고, 상기 제1 레이저 출력부와 수직이고, 상기 제1 레이저 출력부로부터 출력되는 레이저 빔의 진행 방향의 후방으로 연장되는 제1 가상선 및 상기 레이저 출력부에 포함된 제2 레이저 출력부와 수직이고, 상기 제2 레이저 출력부로부터 출력되는 레이저 빔의 진행 방향의 후방으로 연장되는 제2 가상선에 기초하여 정의되는 기준점으로부터 상기 대상체까지의 거리를 획득하는 단계를 포함하는 거리 산출 방법이 제공될 수 있다.
여기서, 상기 기준점을 기준으로, 상기 기준점으로부터 상기 대상체까지의 거리 및 상기 기준점으로부터 상기 제1 레이저 출력부까지의 거리에 기초하여 상기 라이다 장치로부터 상기 대상체까지의 거리를 산출하는 단계를 포함할 수 있다.
여기서, 상기 기준점을 기준으로, 상기 제1 레이저 출력부로부터 상기 대상체까지의 거리, 상기 기준점으로부터 상기 제2 레이저 출력부까지의 거리 및 상기 기준점, 상기 제1 레이저 출력부 및 상기 제2 레이저 출력부의 각도에 기초하여 상기 대상체의 위치를 산출하는 단계를 포함할 수 있다.
여기서, 상기 기준점은 제1 거리의 지름을 가지는 구(sphere)의 중심점이고,
상기 제1 거리는 상기 제1 가상선과 상기 제2 가상선의 교점으로부터 제3 가상선 -상기 레이저 출력부 중 제3 레이저 출력부와 수직이고, 상기 제3 레이저 출력부로부터 출력되는 레이저 빔의 진행 방향의 후방으로 연장됨- 까지의 최소 거리일 수 있다.
여기서, 상기 기준점은 제1 거리의 지름을 가지는 구(sphere)의 중심점이고,
상기 제1 거리는 상기 제1 가상선, 상기 제2 가상선 및 제3 가상선 가상선 -상기 레이저 출력부 중 제3 레이저 출력부와 수직이고, 상기 제3 레이저 출력부로부터 출력되는 레이저 빔의 진행 방향의 후방으로 연장됨- 의 교점들 중 교점들 사이의 거리 중 최대 거리와 동일할 수 있다.
여기서, 상기 제1 가상선은 상기 제1 레이저 출력부의 제1 지점에서의 가상선이고, 상기 제2 가상선은 상기 제2 레이저 출력부의 제2 지점에서의 가상선일 수 있다.
여기서, 상기 제1 지점은 상기 제1 레이저 출력부의 중앙 지점이고, 상기 제2 지점은 상기 제2 레이저 출력부의 중앙 지점일 수 있다.
여기서, 상기 제1 레이저 출력부의 중앙 지점을 원점으로 하여 산출된 상기 제1 지점의 좌표와, 상기 제2 레이저 출력부의 중앙 지점을 원점으로 하여 산출된 상기 제2 지점의 좌표는 동일할 수 있다.
여기서, 상기 제2 레이저 출력부는 상기 제1 레이저 출력부에 대해 제1 각도를 이룰 수 있다.
여기서, 상기 제1 각도는 120도일 수 있다.
여기서, 상기 기준점으로부터 상기 제1 레이저 출력부까지의 최소 거리는, 상기 기준점으로부터 상기 제2 레이저 출력부까지의 최소 거리와 같을 수 있다.
여기서, 상기 기준점으로부터 상기 제1 레이저 출력부까지의 최소 거리는 미리 정해질 수 있다.
다른 일 실시예에 따르면, 대상체를 향해 레이저를 조사하는 레이저 출력부, 상기 레이저 출력부에서 조사된 레이저가 상기 대상체에 반사되어 되돌아오는 레이저를 수광하는 레이저 수광부, 및 상기 레이저 출력부에서 레이저가 출력되는 출광 시점 및 상기 대상체로부터 반사되는 레이저 빔이 수광되는 수광 시점을 획득하고, 상기 출광 시점 및 상기 수광 시점에 기초하여 산출되는 상기 수광되는 레이저 빔의 비행 거리에 기초하고, 상기 레이저 출력부 중 제1 레이저 출력부와 수직이고, 상기 제1 레이저 출력부로부터 출력되는 레이저 빔의 진행 방향의 후방으로 연장되는 제1 가상선 및 상기 레이저 출력부 중 제2 레이저 출력부와 수직이고, 상기 제2 레이저 출력부로부터 출력되는 레이저 빔의 진행 방향의 후방으로 연장되는 제2 가상선에 기초하여 정의되는 기준점으로부터 상기 대상체까지의 거리를 산출하는 제어부를 포함하는 라이다 장치가 제공될 수 있다.
일 실시예에 따르면, 제1 DBR 레이어, 제2 DBR 레이어, 상기 제1 DBR 레이어 및 상기 제2 DBR 레이어 사이에 배치되어 레이저 빔을 출력하는 활성 레이어, 상기 제1 DBR 레이어 상에 배치된 컨택 영역, 및 상기 컨택 영역 상에 배치되는 리플렉터를 포함하고, 상기 리플렉터는 상기 컨택 영역과 마주하는 제1 면을 가지고, 상기 제1 면은 상기 활성 레이어로부터 상기 컨택 영역을 통해 출력되는 레이저 빔을 반사시킬 수 있는 빅셀이 제공될 수 있다.
여기서, 상기 컨택 영역 및 상기 리플렉터는 상기 제1 면에서 맞닿을 수 있다.
여기서, 상기 제1 면의 면적은 상기 컨택 영역의 면적과 같거나 작을 수 있다.
여기서, 상기 리플렉터의 길이는 상기 컨택 영역의 길이와 같거나 작을 수 있다.
여기서, 상기 리플렉터는 전도성 있는 물질을 포함할 수 있다.
여기서, 상기 리플렉터는 은(Ag) 또는 알루미늄(Al)을 포함할 수 있다.
여기서, 상기 제1 면은 곡면을 포함할 수 있다.
여기서, 상기 컨택 영역은 티타늄(Ti), 크롬(Cr) 또는 니켈(Ni)을 포함할 수 있다.
여기서, 상기 리플렉터의 반사율은 상기 컨택 영역의 반사율보다 클 수 있다.
여기서, 상기 컨택 영역의 두께는 2nm 이하일 수 있다.
일 실시예에 따르면, 대상체를 향해 레이저를 조사하는 레이저 출력부, 및 상기 레이저 출력부에서 조사된 레이저가 상기 대상체에 반사되어 되돌아오는 레이저를 수광하는 레이저 수광부를 포함하고, 상기 레이저 출력부는 복수의 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 이미터(emitter)를 포함하고, 상기 빅셀 이미터는 제1 DBR 레이어, 제2 DBR 레이어, 상기 제1 DBR 레이어 및 상기 제2 DBR 레이어 사이에 배치되어 레이저 빔을 출력하는 활성 레이어, 상기 제1 DBR 레이어 상에 배치된 컨택 영역, 및 상기 컨택 영역 상에 배치되는 리플렉터를 포함하고, 상기 리플렉터는 상기 컨택 영역과 마주하는 제1 면을 가지고, 상기 제1 면은 상기 활성 레이어로부터 상기 컨택 영역을 통해 출력되는 레이저 빔을 반사시킬 수 있는 라이다 장치가 제공될 수 있다.
일 실시예에 따르면, 제1 축을 따라 배치되는 복수의 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 유닛을 포함하는 제1 서브 어레이, 제1 상부 컨택 및 제1 하부 컨택을 포함하고, 상기 제1 서브 어레이에 포함되는 제1 빅셀 유닛, 제2 상부 컨택 및 제2 하부 컨택을 포함하고, 상기 제1 서브 어레이에 포함되는 제2 빅셀 유닛, 상기 제1 상부 컨택 및 상기 제2 하부 컨택과 전기적으로 연결되는 제1 컨택, 및 상기 제2 상부 컨택 및 상기 제1 하부 컨택과 전기적으로 연결되는 제2 컨택을 포함하고, 상기 제1 컨택에 제1 전압이 인가되고, 상기 제2 컨택에 상기 제1 전압보다 작은 제2 전압이 인가되는 경우, 상기 제1 빅셀 유닛이 작동하고, 상기 제1 컨택에 상기 제2 전압이 인가되고, 상기 제2 컨택에 상기 제1 전압이 인가되는 경우, 상기 제2 빅셀 유닛이 작동하는 빅셀 어레이가 제공될 수 있다.
여기서, 상기 제1 상부 컨택 및 상기 제2 하부 컨택은 동일한 메탈 레이어일 수 있다.
여기서, 상기 제2 상부 컨택 및 상기 제1 하부 컨택은 동일한 메탈 레이어일 수 있다.
여기서, 상기 제1 전압은 기준 전압을 기준으로 양의 전압이고, 상기 제2 전압은 상기 기준 전압을 기준으로 음의 전압일 수 있다.
여기서, 상기 제1 컨택과 전기적으로 연결되는 제1 와이어, 및 기 제2 컨택과 전기적으로 연결되는 제2 와이어를 포함할 수 있다.
여기서, 제3 상부 컨택 및 제3 하부 컨택을 포함하고, 상기 제1 서브 어레이에 포함되는 제3 빅셀 유닛, 제4 상부 컨택 및 제4 하부 컨택을 포함하고, 상기 제1 서브 어레이에 포함되는 제4 빅셀 유닛, 및 상기 제3 상부 컨택 및 상기 제4 하부 컨택과 전기적으로 연결되는 제3 컨택을 포함하고, 상기 제2 컨택은 상기 제4 상부 컨택 및 상기 제3 하부 컨택과 전기적으로 연결되고, 상기 제2 컨택에 제3 전압이 인가되고, 상기 제3 컨택에 상기 제3 전압보다 큰 제4 전압이 인가되는 경우, 상기 제3 빅셀 유닛이 작동하고, 상기 제2 컨택에 상기 제4 전압이 인가되고, 상기 제3 컨택에 상기 제3 전압이 인가되는 경우, 상기 제4 빅셀 유닛이 작동할 수 있다.
여기서, 상기 제1 서브 어레이와 상기 제1 축과 상이한 제2 축을 따라 배치되는 제2 서브 어레이, 제3 상부 컨택 및 제3 하부 컨택을 포함하고, 상기 제2 서브 어레이에 포함되는 제3 빅셀 유닛, 제4 상부 컨택 및 제4 하부 컨택을 포함하고, 상기 제2 서브 어레이에 포함되는 제4 빅셀 유닛, 및 상기 제3 하부 컨택 및 상기 제4 상부 컨택과 전기적으로 연결되는 제3 컨택을 포함하고, 상기 제1 컨택은 상기 제3 상부 컨택 및 상기 제4 하부 컨택과 전기적으로 연결되고, 상기 제1 컨택에 제3 전압이 인가되고, 상기 제3 컨택에 상기 제3 전압보다 큰 제4 전압이 인가되는 경우, 상기 제4 빅셀 유닛이 작동하고, 상기 제1 컨택에 상기 제4 전압이 인가되고, 상기 제3 컨택에 상기 제3 전압이 인가되는 경우, 상기 제3 빅셀 유닛이 작동할 수 있다.
일 실시예에 따르면, 제1 축을 따라 배치되는 복수의 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 유닛을 포함하는 제1 서브 어레이, 제1 상부 DBR(Distributed Bragg Reflector) 및 제1 하부 DBR을 포함하고, 상기 제1 서브 어레이에 포함되는 제1 빅셀 유닛, 제2 상부 DBR 및 제2 하부 DBR을 포함하고, 상기 제1 서브 어레이에 포함되는 제2 빅셀 유닛, 상기 제1 상부 DBR 및 상기 제2 상부 DBR과 전기적으로 연결되는 제1 컨택, 및 상기 제1 하부 DBR 및 상기 제2 하부 DBR과 전기적으로 연결되는 제2 컨택을 포함하고, 상기 제1 상부 DBR 및 상기 제2 하부 DBR은 P형으로 도핑되고, 상기 제2 상부 DBR 및 상기 제1 하부 DBR은 N형으로 도핑되고, 상기 제1 컨택에 제1 전압이 인가되고, 상기 제2 컨택에 상기 제1 전압보다 작은 제2 전압이 인가되는 경우, 상기 제1 빅셀 유닛이 작동하고, 상기 제1 컨택에 상기 제2 전압이 인가되고, 상기 제2 컨택에 상기 제1 전압이 인가되는 경우, 상기 제2 빅셀 유닛이 작동하는 빅셀 어레이가 제공될 수 있다.
여기서, 상기 제1 전압은 기준 전압을 기준으로 양의 전압이고, 상기 제2 전압은 상기 기준 전압을 기준으로 음의 전압일 수 있다.
여기서, 상기 제1 하부 컨택 및 상기 제2 하부 컨택과 전기적으로 연결되는 공통 컨택을 포함하고, 상기 제2 컨택은 상기 공통 컨택을 통해 상기 제1 하부 컨택 및 상기 제2 하부 컨택과 전기적으로 연결될 수 있다.
여기서, 상기 제1 컨택과 전기적으로 연결되는 제1 와이어, 및 상기 제2 컨택과 전기적으로 연결되는 제2 와이어를 포함할 수 있다.
여기서, 상기 제1 서브 어레이와 상기 제1 축과 상이한 제2 축을 따라 배치되는 제2 서브 어레이, 제3 상부 DBR 및 제3 하부 DBR을 포함하고, 상기 제2 서브 어레이에 포함되는 제3 빅셀 유닛, 제4 상부 DBR 및 제4 하부 DBR을 포함하고, 상기 제2 서브 어레이에 포함되는 제4 빅셀 유닛, 및 상기 제3 하부 DBR 및 상기 제4 하부 DBR과 전기적으로 연결되는 제3 컨택을 포함하고, 상기 제3 상부 DBR 및 상기 제4 하부 DBR은 P형으로 도핑되고, 상기 제4 상부 DBR 및 상기 제3 하부 DBR은 N형으로 도핑되고, 상기 제1 컨택은 상기 제3 상부 DBR 및 상기 제4 상부 DBR과 전기적으로 연결되고, 상기 제1 컨택에 제3 전압이 인가되고, 상기 제3 컨택에 상기 제3 전압보다 큰 제4 전압이 인가되는 경우, 상기 제4 빅셀 유닛이 작동하고, 상기 제1 컨택에 상기 제4 전압이 인가되고, 상기 제3 컨택에 상기 제3 전압이 인가되는 경우, 상기 제3 빅셀 유닛이 작동할 수 있다.
여기서, 상기 제3 컨택과 전기적으로 연결되는 제3 와이어를 포함할 수 있다.
일 실시예에 따르면, 제1 축을 따라 배치되는 복수의 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 유닛을 포함하는 제1 서브 어레이, 제1 DBR(Distributed Bragg Reflector) 및 제2 DBR을 포함하고, 상기 제1 서브 어레이에 포함되는 제1 빅셀 유닛, 제3 DBR 및 제4 DBR을 포함하고, 상기 제1 서브 어레이에 포함되는 제2 빅셀 유닛, 상기 제1 DBR 및 상기 제3 DBR과 전기적으로 연결되는 제1 컨택, 및 상기 제2 DBR 및 상기 제4 DBR과 전기적으로 연결되는 제2 컨택을 포함하고, 상기 제1 DBR 및 상기 제4 DBR은 제1 성질로 도핑되고, 상기 제2 DBR 및 상기 제3 DBR은 상기 제1 성질과 다른 제2 성질로 도핑되고, 상기 제2 DBR의 반사율은 상기 제1 DBR의 반사율보다 크고, 상기 제4 DBR의 반사율은 상기 제3 DBR의 반사율보다 크고, 상기 제1 컨택에 제1 전압이 인가되고, 상기 제2 컨택에 상기 제1 전압보다 작은 제2 전압이 인가되는 경우, 상기 제1 빅셀 유닛이 작동하고, 상기 제1 컨택에 상기 제2 전압이 인가되고, 상기 제2 컨택에 상기 제1 전압이 인가되는 경우, 상기 제2 빅셀 유닛이 작동하는 빅셀 어레이가 제공될 수 있다.
일 실시예에 따르면, 대상체를 향해 레이저를 조사하는 레이저 출력부, 및 상기 레이저 출력부에서 조사된 레이저가 상기 대상체에 반사되어 되돌아오는 레이저를 수광하는 레이저 수광부를 포함하고, 상기 레이저 출력부는, 제1 축을 따라 배치되는 복수의 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 유닛을 포함하는 제1 서브 어레이, 제1 상부 컨택 및 제1 하부 컨택을 포함하고, 상기 제1 서브 어레이에 포함되는 제1 빅셀 유닛, 제2 상부 컨택 및 제2 하부 컨택을 포함하고, 상기 제1 서브 어레이에 포함되는 제2 빅셀 유닛, 상기 제1 상부 컨택 및 상기 제2 하부 컨택과 전기적으로 연결되는 제1 컨택, 및 상기 제2 상부 컨택 및 상기 제1 하부 컨택과 전기적으로 연결되는 제2 컨택을 포함하고, 상기 제1 컨택에 제1 전압이 인가되고, 상기 제2 컨택에 상기 제1 전압보다 작은 제2 전압이 인가되는 경우, 상기 제1 빅셀 유닛이 작동하고, 상기 제1 컨택에 상기 제2 전압이 인가되고, 상기 제2 컨택에 상기 제1 전압이 인가되는 경우, 상기 제2 빅셀 유닛이 작동하는 라이다 장치가 제공될 수 있다.
일 실시예에 따르면, 대상체를 향해 레이저를 조사하는 레이저 출력부, 및 상기 레이저 출력부에서 조사된 레이저가 상기 대상체에 반사되어 되돌아오는 레이저를 수광하는 레이저 수광부를 포함하고, 상기 레이저 출력부는, 제1 축을 따라 배치되는 복수의 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 유닛을 포함하는 제1 서브 어레이, 제1 상부 DBR(Distributed Bragg Reflector) 및 제1 하부 DBR을 포함하고, 상기 제1 서브 어레이에 포함되는 제1 빅셀 유닛, 제2 상부 DBR 및 제2 하부 DBR을 포함하고, 상기 제1 서브 어레이에 포함되는 제2 빅셀 유닛, 상기 제1 상부 DBR 및 상기 제2 상부 DBR과 전기적으로 연결되는 제1 컨택, 및 상기 제1 하부 DBR 및 상기 제2 하부 DBR과 전기적으로 연결되는 제2 컨택을 포함하고, 상기 제1 상부 DBR 및 상기 제2 하부 DBR은 P형으로 도핑되고, 상기 제2 상부 DBR 및 상기 제1 하부 DBR은 N형으로 도핑되고, 상기 제1 컨택에 제1 전압이 인가되고, 상기 제2 컨택에 상기 제1 전압보다 작은 제2 전압이 인가되는 경우, 상기 제1 빅셀 유닛이 작동하고, 상기 제1 컨택에 상기 제2 전압이 인가되고, 상기 제2 컨택에 상기 제1 전압이 인가되는 경우, 상기 제2 빅셀 유닛이 작동하는 라이다 장치가 제공될 수 있다.
다른 일 실시예에 따르면, 제1 축을 따라 배치되는 제1 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 유닛 및 제2 빅셀 유닛을 포함하는 제1 서브 어레이, 상기 제1 서브 어레이에 연결되는 공통 컨택, 상기 공통 컨택의 일단에 전기적으로 연결되는 제1 컨택, 및 상기 제1 컨택의 일단과 상기 제1 빅셀 유닛 사이의 저항을 나타내는 제1 저항 및 상기 제1 빅셀 유닛과 상기 제2 빅셀 유닛 사이의 저항을 나타내는 제2 저항의 합성 저항이 감소되도록, 상기 공통 컨택의 다른 일단에 전기적으로 연결되는 제2 컨택을 포함하고, 상기 제1 빅셀 유닛은 상기 제2 빅셀 유닛보다 상기 공통 컨택의 일단과 인접하고, 상기 제2 빅셀 유닛은 상기 제1 빅셀 유닛보다 상기 공통 컨택의 다른 일단과 인접하는 빅셀 어레이가 제공될 수 있다.
여기서, 상기 제1 컨택 및 상기 제2 컨택에 동일한 크기의 전압이 인가될 수 있다.
여기서, 상기 공통 컨택 및 상기 제1 컨택을 연결하는 제1 와이어, 및 상기 공통 컨택 및 상기 제2 컨택을 연결하는 제2 와이어를 포함할 수 있다.
여기서, 상기 제1 저항은 상기 제1 와이어의 저항을 포함할 수 있다.
여기서, 상기 제2 저항은 상기 제2 와이어의 저항을 포함할 수 있다.
여기서, 상기 제1 축과 상이한 제2 축을 따라 배치되는 상기 제1 빅셀 유닛 및 제3 빅셀 유닛을 포함하는 제2 서브 어레이, 상기 제2 서브 어레이의 일단과 인접하게 배치되는 제3 컨택, 및 상기 제2 서브 어레이의 다른 일단과 인접하게 배치되는 제4 컨택을 포함하고, 상기 제1 빅셀 유닛은 상기 제3 컨택과 전기적으로 연결되어 있고, 상기 제3 빅셀 유닛은 상기 제4 컨택과 전기적으로 연결되어 있을 수 있다.
여기서, 상기 제3 컨택 및 상기 제4 컨택에 동일한 크기의 전압이 인가될 수 있다.
여기서, 상기 제1 컨택 및 상기 제2 컨택에는 음의 전압 및 양의 전압 중 어느 하나가 인가되고, 상기 제3 컨택 및 상기 제4 컨택에는 다른 하나가 인가될 수 있다.
여기서, 상기 제1 축을 따라 배치되는 상기 제3 빅셀 유닛 및 제4 빅셀 유닛을 포함하는 제3 서브 어레이, 상기 제3 서브 어레이의 일단과 인접하게 배치되는 제5 컨택, 및 상기 제3 서브 어레이의 다른 일단과 인접하게 배치되는 제6 컨택을 포함하고, 상기 제3 빅셀 유닛은 상기 제5 컨택과 전기적으로 연결되어 있고, 상기 제4 빅셀 유닛은 상기 제6 컨택과 전기적으로 연결되어 있고, 상기 제1 빅셀 유닛은 동작시키고, 상기 제3 빅셀 유닛은 동작시키지 않기 위해, 상기 제1 컨택, 상기 제2 컨택, 상기 제3 컨택 및 상기 제4 컨택에는 전압을 인가하고, 상기 제5 컨택 및 상기 제6 컨택에는 전압을 인가하지 않을 수 있다.
다른 일 실시예에 따르면, 제1 축을 따라 배치되는 제1 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 유닛 및 제2 빅셀 유닛을 포함하는 제1 서브 어레이, 상기 제1 서브 어레이에 연결되는 공통 컨택, 상기 공통 컨택의 일단에 전기적으로 연결되는 제1 컨택, 및 상기 제1 빅셀 유닛의 제1 합성 저항과 상기 제2 빅셀 유닛의 제2 합성 저항의 차이가 감소되도록, 상기 공통 컨택의 다른 일단에 전기적으로 연결되는 제2 컨택을 포함하고, 상기 제1 합성 저항은 상기 공통 컨택의 일단과 상기 제1 빅셀 유닛 사이의 저항을 나타내는 제1 저항 및 상기 제1 빅셀 유닛과 상기 공통 컨택의 다른 일단 사이의 저항을 나타내는 제2 저항의 합성 저항이고, 상기 제2 합성 저항은 상기 공통 컨택의 일단과 상기 제2 빅셀 유닛 사이의 저항을 나타내는 제3 저항 및 상기 제2 빅셀 유닛과 상기 공통 컨택의 다른 일단 사이의 저항을 나타내는 제4 저항의 합성 저항인 빅셀 어레이가 제공될 수 있다.
여기서, 상기 제1 빅셀 유닛은 상기 제2 빅셀 유닛보다 상기 공통 컨택의 일단과 인접하고, 상기 제2 빅셀 유닛은 상기 제1 빅셀 유닛보다 상기 공통 컨택의 다른 일단과 인접할 수 있다.
여기서, 상기 제1 컨택 및 상기 제2 컨택에 동일한 크기의 전압이 인가될 수 있다.
여기서, 상기 공통 컨택 및 상기 제1 컨택을 연결하는 제1 와이어, 및 상기 공통 컨택 및 상기 제2 컨택을 연결하는 제2 와이어를 포함할 수 있다.
여기서, 상기 제1 저항은 상기 제1 와이어의 저항을 포함할 수 있다.
여기서, 상기 제4 저항은 상기 제2 와이어의 저항을 포함할 수 있다.
여기서, 상기 제1 축과 상이한 제2 축을 따라 배치되는 상기 제1 빅셀 유닛 및 상기 제3 빅셀 유닛을 포함하는 제2 서브 어레이, 상기 제2 서브 어레이의 일단과 인접하게 배치되는 제3 컨택, 및 상기 제2 서브 어레이의 다른 일단과 인접하게 배치되는 제4 컨택을 포함하고, 상기 제1 빅셀 유닛은 상기 제3 컨택과 전기적으로 연결되어 있고, 상기 제3 빅셀 유닛은 상기 제4 컨택과 전기적으로 연결되어 있을 수 있다.
여기서, 상기 제3 컨택 및 상기 제4 컨택에 동일한 크기의 전압이 인가될 수 있다.
여기서, 상기 제1 컨택 및 상기 제2 컨택에는 기준 전압 이상의 전압 및 상기 기준 전압 이하의 전압 중 어느 하나가 인가되고, 상기 제3 컨택 및 상기 제4 컨택에는 다른 하나가 인가될 수 있다.
여기서, 상기 제1 축을 따라 배치되는 상기 제3 빅셀 유닛 및 제4 빅셀 유닛을 포함하는 제3 서브 어레이, 상기 제3 서브 어레이의 일단과 인접하게 배치되는 제5 컨택, 및 상기 제3 서브 어레이의 다른 일단과 인접하게 배치되는 제6 컨택을 포함하고, 상기 제3 빅셀 유닛은 상기 제5 컨택과 전기적으로 연결되어 있고, 상기 제4 빅셀 유닛은 상기 제6 컨택과 전기적으로 연결되어 있고, 상기 제1 빅셀 유닛은 동작시키고, 상기 제3 빅셀 유닛은 동작시키지 않기 위해, 상기 제1 컨택, 상기 제2 컨택, 상기 제3 컨택 및 상기 제4 컨택에는 전압을 인가하고, 상기 제5 컨택 및 상기 제6 컨택에는 전압을 인가하지 않을 수 있다.
다른 일 실시예에 따르면, 대상체를 향해 레이저를 조사하는 레이저 출력부, 및 상기 레이저 출력부에서 조사된 레이저가 상기 대상체에 반사되어 되돌아오는 레이저를 수광하는 레이저 수광부를 포함하고, 상기 레이저 출력부는, 제1 축을 따라 배치되는 제1 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 유닛 및 제2 빅셀 유닛을 포함하는 제1 서브 어레이, 상기 제1 서브 어레이에 연결되는 공통 컨택, 상기 공통 컨택의 일단에 전기적으로 연결되는 제1 컨택, 및 상기 제1 컨택의 일단과 상기 제1 빅셀 유닛 사이의 저항을 나타내는 제1 저항 및 상기 제1 빅셀 유닛과 상기 제2 빅셀 유닛 사이의 저항을 나타내는 제2 저항의 합성 저항이 감소되도록, 상기 공통 컨택의 다른 일단에 전기적으로 연결되는 제2 컨택을 포함하고, 상기 제1 빅셀 유닛은 상기 제2 빅셀 유닛보다 상기 공통 컨택의 일단과 인접하고, 상기 제2 빅셀 유닛은 상기 제1 빅셀 유닛보다 상기 공통 컨택의 다른 일단과 인접하는 라이다 장치가 제공될 수 있다.
다른 일 실시예에 따르면, 대상체를 향해 레이저를 조사하는 레이저 출력부, 및 상기 레이저 출력부에서 조사된 레이저가 상기 대상체에 반사되어 되돌아오는 레이저를 수광하는 레이저 수광부를 포함하고, 상기 레이저 출력부는, 제1 축을 따라 배치되는 제1 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 유닛 및 제2 빅셀 유닛을 포함하는 제1 서브 어레이, 상기 제1 서브 어레이에 연결되는 공통 컨택, 상기 공통 컨택의 일단에 전기적으로 연결되는 제1 컨택, 및 상기 제1 빅셀 유닛의 제1 합성 저항과 상기 제2 빅셀 유닛의 제2 합성 저항의 차이가 감소되도록, 상기 공통 컨택의 다른 일단에 전기적으로 연결되는 제2 컨택을 포함하고, 상기 제1 합성 저항은 상기 공통 컨택의 일단과 상기 제1 빅셀 유닛 사이의 저항을 나타내는 제1 저항 및 상기 제1 빅셀 유닛과 상기 공통 컨택의 다른 일단 사이의 저항을 나타내는 제2 저항의 합성 저항이고, 상기 제2 합성 저항은 상기 공통 컨택의 일단과 상기 제2 빅셀 유닛 사이의 저항을 나타내는 제3 저항 및 상기 제2 빅셀 유닛과 상기 공통 컨택의 다른 일단 사이의 저항을 나타내는 제4 저항의 합성 저항인 라이다 장치가 제공될 수 있다.
일 실시예에 따르면, 레이저를 이용하여 거리를 측정하는 라이다 장치에 이용되는 레이저 출력 장치로서, 제1 빅셀 에미터 및 제2 빅셀 에미터를 포함하는 제1 빅셀 유닛 및 제3 빅셀 에미터 및 제4 빅셀 에미터를 포함하는 제2 빅셀 유닛을 포함하는 빅셀 어레이, 상기 빅셀 어레이로부터 출력된 레이저를 콜리메이션 하기 위한 마이크로 렌즈 어레이, 상기 마이크로 렌즈 어레이로부터 콜리메이션 된 레이저를 스티어링하기 위한 프리즘 어레이를 포함하되, 상기 마이크로 렌즈 어레이는 상기 제1 빅셀 에미터에 대응되어 배치되는 제1 마이크로 렌즈 엘리먼트, 상기 제2 빅셀 에미터에 대응되어 배치되는 제2 마이크로 렌즈 엘리먼트, 상기 제3 빅셀 에미터에 대응되어 배치되는 제3 마이크로 렌즈 엘리먼트 및 상기 제4 빅셀 에미터에 대응되어 배치되는 제4 마이크로 렌즈 엘리먼트를 포함하며, 상기 프리즘 어레이는 상기 제1 빅셀 유닛에 대응되어 배치되며 상기 제1 빅셀 유닛으로부터 출력된 레이저를 제1 각도로 스티어링 하기 위한 제1 프리즘 엘리먼트 및 상기 제2 빅셀 유닛에 대응되어 배치되며 상기 제2 빅셀 유닛으로부터 출력된 레이저를 제2 각도로 스티어링 하기 위한 제2 프리즘 엘리먼트를 포함하되, 상기 제1 빅셀 유닛 및 상기 제2 빅셀 유닛이 서로 독립적으로 동작되기 위하여 상기 제1 및 제2 빅셀 에미터는 제1 N-컨택 및 제1 P-컨택을 공유하고, 상기 제3 및 제4 빅셀 에미터는 제2 N-컨택 및 제2 P-컨택을 공유하며, 상기 제1 각도와 상기 제2 각도는 상이한 레이저 출력 장치가 제공될 수 있다.
여기서, 상기 제1 N-컨택 및 상기 제2 N-컨택은 서로 전기적으로 연결되되, 상기 제1 P-컨택 및 상기 제2 P-컨택은 서로 전기적으로 연결되지 않을 수 있다.
여기서, 상기 제1 P-컨택 및 상기 제2 P-컨택은 서로 전기적으로 연결되되, 상기 제1 N-컨택 및 상기 제2 N-컨택은 서로 전기적으로 연결되지 않을 수 있다.
여기서, 상기 제1 마이크로 렌즈 엘리먼트의 직경은 상기 제1 빅셀 에미터의 직경보다 크되 상기 제1 빅셀 에미터 및 상기 제2 빅셀 에미터 사이의 거리에 기초하여 설정될 수 있다.
여기서, 제1 시점에 상기 제1 빅셀 유닛으로부터 레이저가 출력되도록 상기 제1 N-컨택 및 제1 P-컨택이 통전되고, 상기 제1 시점과 상이한 제2 시점에 상기 제2 빅셀 유닛으로부터 레이저가 출력되도록 상기 제2 N-컨택 및 제2 P-컨택이 통전되도록 상기 빅셀 어레이의 동작을 제어하는 제어부를 더 포함할 수 있다.
여기서, 상기 제1 시점에 상기 레이저 출력 장치로부터 조사된 레이저의 방향과 상기 제2 시점에 상기 레이저 출력 장치로부터 조사된 레이저의 방향이 서로 상이할 수 있다.
다른 일 실시예에 따르면, 레이저를 이용하여 거리를 측정하는 라이다 장치에 이용되는 레이저 출력 장치로서,레이저를 출력하기 위한 제1 빅셀 에미터를 포함하는 빅셀 어레이, 상기 빅셀 어레이로부터 출력된 레이저를 콜리메이션 하기 위한 마이크로 렌즈 어레이 및 상기 마이크로 렌즈 어레이로부터 콜리메이션 된 레이저를 스티어링 하기 위한 프리즘 어레이를 포함하되, 상기 마이크로 렌즈 어레이는 상기 제1 빅셀 에미터로부터 출력된 제1 레이저를 콜리메이션 하기 위한 제1 마이크로 렌즈 엘리먼트를 포함하고, 상기 제1 마이크로 렌즈 엘리먼트로부터 콜리메이션된 상기 제1 레이저는 제1 다이버전스 각도 를 가지며, 상기 프리즘 어레이는 상기 제1 레이저를 스티어링 하기 위한 제1 프리즘 엘리먼트를 포함하되, 상기 제1 프리즘 엘리먼트의 굴절률이 n 이며, 상기 제1 프리즘 엘리먼트의 경사각이
를 가지며, 상기 프리즘 어레이는 상기 제1 레이저를 스티어링 하기 위한 제1 프리즘 엘리먼트를 포함하되, 상기 제1 프리즘 엘리먼트의 굴절률이 n 이며, 상기 제1 프리즘 엘리먼트의 경사각이  인 경우 상기 제1 프리즘 엘리먼트의 경사각은
인 경우 상기 제1 프리즘 엘리먼트의 경사각은 를 만족하도록 형성되는 레이저 출력 장치가 제공될 수 있다.
를 만족하도록 형성되는 레이저 출력 장치가 제공될 수 있다.
여기서, 상기 제1 레이저가 상기 제1 프리즘 엘리먼트를 통해 상기 프리즘 어레이의 법선에 대하여 제1 각도로 스티어링 되는 경우 상기 제1 레이저가 상기 제1 프리즘 엘리먼트를 통해 반사되는 반사율이 10%이하가 되도록 상기 제1 각도가 25도 이하로 설정될 수 있다.
여기서, 상기 빅셀 어레이는 레이저를 출력하기 위한 제2 빅셀 에미터를 포함하며, 상기 마이크로 렌즈 어레이는 상기 제2 빅셀 에미터로부터 출력된 제2 레이저를 콜리메이션 하기 위한 제2 마이크로 렌즈 엘리먼트를 포함하되, 상기 제1 프리즘 엘리먼트는 상기 제1 레이저 및 상기 제2 레이저를 동일한 각도로 스티어링 하도록 배치될 수 있다.
여기서, 상기 빅셀 어레이는 레이저를 출력하기 위한 제3 빅셀 에미터를 포함하며, 상기 마이크로 렌즈 어레이는 상기 제3 빅셀 에미터로부터 출력된 제3 레이저를 콜리메이션 하기 위한 제3 마이크로 렌즈 엘리먼트를 포함하고, 상기 프리즘 어레이는 상기 제3 레이저를 스티어링 하기 위한 제2 프리즘 엘리먼트를 포함하되, 상기 제3 마이크로 렌즈 엘리먼트로부터 콜리메이션 된 상기 제3 레이저는 제2 다이버전스 각도  를 가지며, 상기 제2 프리즘 엘리먼트의 굴절률이 m 이며, 상기 제2 프리즘 엘리먼트의 경사각이
를 가지며, 상기 제2 프리즘 엘리먼트의 굴절률이 m 이며, 상기 제2 프리즘 엘리먼트의 경사각이  인 경우 상기 제2 프리즘 엘리먼트의 경사각은
인 경우 상기 제2 프리즘 엘리먼트의 경사각은  를 만족하도록 배치되며 상기 제1 및 제2 레이저의 조사 방향과 상기 제3 레이저의 조사 방향이 서로 상이할 수 있다.
를 만족하도록 배치되며 상기 제1 및 제2 레이저의 조사 방향과 상기 제3 레이저의 조사 방향이 서로 상이할 수 있다.
또 다른 일 실시예에 따르면, 레이저를 이용하여 거리를 측정하는 라이다 장치에 이용되는 레이저 출력 장치로서, 제1 빅셀 에미터 및 제2 빅셀 에미터를 포함하는 제1 빅셀 유닛을 포함하는 빅셀 어레이, 상기 빅셀 어레이로부터 출력된 레이저를 콜리메이션 하기 위한 마이크로 렌즈 어레이 및 상기 마이크로 렌즈 어레이로부터 콜리메이션 된 레이저를 스티어링하기 위한 프리즘 어레이를 포함하되, 상기 마이크로 렌즈 어레이는 상기 제1 빅셀 에미터에 대응되어 배치되는 제1 마이크로 렌즈 엘리먼트 및 상기 제2 빅셀 에미터에 대응되어 배치되는 제2 마이크로 렌즈 엘리먼트를 포함하며, 상기 마이크로 렌즈 어레이는 상기 제1 빅셀 유닛에 대응되어 배치되며, 상기 제1 마이크로 렌즈 엘리먼트 및 상기 제2 마이크로 렌즈 엘리먼트를 포함하는 제1 마이크로 렌즈 유닛을 포함하고, 상기 프리즘 어레이는 상기 제1 빅셀 유닛에 대응되어 배치되며 상기 제1 빅셀 유닛으로부터 출력된 레이저를 소정의 각도로 스티어링 하기 위한 제1 프리즘 엘리먼트를 포함하되, 상기 제1 빅셀 유닛의 직경은 상기 제1 마이크로 렌즈 유닛의 직경 보다 작으며, 상기 제1 마이크로 렌즈 유닛의 직경은 상기 제1 프리즘 엘리먼트의 한 변의 길이 보다 작은 레이저 출력 장치가 제공될 수 있다.
여기서, 상기 제1 마이크로 렌즈 엘리먼트의 직경은 상기 제1 빅셀 에미터의 직경보다 크되, 상기 제1 빅셀 에미터 및 상기 제2 빅셀 에미터 사이의 거리에 대응되도록 설정될 수 있다.
여기서, 상기 제1 마이크로 렌즈 엘리먼트의 직경은 상기 제1 빅셀 에미터의 직경과 상기 제1 빅셀 에미터 및 상기 제2 빅셀 에미터 사이의 거리를 합한 값 보다 작거나 같도록 설정될 수 있다.
여기서, 상기 빅셀 어레이는 제3 빅셀 에미터를 포함하는 제2 빅셀 유닛을 포함하며, 상기 마이크로 렌즈 어레이는 상기 제3 빅셀 에미터에 대응되어 배치되는 제3 마이크로 렌즈 엘리먼트를 포함하고, 상기 마이크로 렌즈 어레이는 상기 제3 마이크로 렌즈 엘리먼트를 포함하며, 상기 제2 빅셀 유닛에 대응되어 배치되는 제2 마이크로 렌즈 유닛을 포함하고, 상기 프리즘 어레이는 상기 제2 빅셀 유닛에 대응되어 배치되며 상기 제2 빅셀 유닛으로부터 출력된 레이저를 소정의 각도로 스티어링 하기 위한 제2 프리즘 엘리먼트를 포함하되, 상기 제1 빅셀 유닛 및 상기 제2 빅셀 유닛 사이의 거리는 상기 제1 마이크로 렌즈 유닛 및 상기 제2 마이크로 렌즈 유닛 사이의 거리 보다 크며, 상기 제1 마이크로 렌즈 유닛 및 상기 제2 마이크로 렌즈 유닛 사이의 거리는 상기 제1 프리즘 엘리먼트 및 상기 제2 프리즘 엘리먼트 사이의 거리 보다 클 수 있다.
또 다른 일 실시예에 따르면, 레이저를 이용하여 거리를 측정하는 라이다 장치로서, 레이저를 출력하기 위한 레이저 출력부, 상기 레이저 출력부로부터 출력된 레이저가 대상체에서 반사된 경우 반사된 레이저를 수광하는 디텍터부 및 상기 레이저 출력부, 상기 디텍터부의 동작을 제어하되, 상기 디텍터부에서 수광된 레이저를 기초로 상기 대상체와의 거리를 획득하는 제어부를 포함하되, 상기 레이저 출력부는 제1 빅셀 에미터 및 제2 빅셀 에미터를 포함하는 제1 빅셀 유닛 및 제3 빅셀 에미터 및 제4 빅셀 에미터를 포함하는 제2 빅셀 유닛을 포함하는 빅셀 어레이, 상기 빅셀 어레이로부터 출력된 레이저를 콜리메이션 하기 위한 콜리메이션 컴포넌트 및 상기 콜리메이션 컴포넌트로부터 콜리메이션 된 레이저를 스티어링 하기 위한 스티어링 컴포넌트를 포함하되, 상기 제1 빅셀 유닛 및 상기 제2 빅셀 유닛이 서로 독립적으로 동작되기 위하여 상기 제1 및 제2 빅셀 에미터는 제1 N-컨택 및 제1 P-컨택을 공유하고, 상기 제3 및 제4 빅셀 에미터는 제2 N-컨택 및 제2 P-컨택을 공유하며, 상기 제어부는 제1 시점에 제1 방향으로 레이저가 조사 되도록 상기 제1 N-컨택 및 상기 제1 P-컨택을 통전 시켜 상기 레이저 출력부를 동작 시키며, 제2 시점에 상기 제1 방향과 상이한 방향으로 레이저가 조사 되도록 상기 제2 N-컨택 및 상기 제2 P-컨택을 통전 시켜 상기 레이저 출력부를 동작시키는 라이다 장치가 제공될 수 있다.
여기서, 상기 콜리메이션 컴포넌트는 상기 제1 빅셀 에미터에 대응되어 배치되는 제1 마이크로 렌즈 엘리먼트, 상기 제2 빅셀 에미터에 대응되어 배치되는 제2 마이크로 렌즈 엘리먼트, 상기 제3 빅셀 에미터에 대응되어 배치되는 제3 마이크로 렌즈 엘리먼트 및 상기 제4 빅셀 에미터에 대응되어 배치되는 제4 마이크로 렌즈 엘리먼트를 포함하며, 상기 제1 마이크로 렌즈 엘리먼트의 직경은 상기 제1 빅셀 에미터의 직경보다 크되 상기 제1 빅셀 에미터 및 상기 제2 빅셀 에미터 사이의 거리에 기초하여 설정될 수 있다.
여기서, 상기 콜리메이션 컴포넌트는 상기 제1 빅셀 유닛에 대응되어 배치되는 제1 마이크로 렌즈 유닛 및 상기 제2 빅셀 유닛에 대응되어 배치되는 제2 마이크로 렌즈 유닛을 포함하며, 상기 제1 마이크로 렌즈 유닛의 직경은 상기 제1 빅셀 유닛의 직경 보다 크며, 상기 제1 마이크로 렌즈 유닛과 상기 제2 마이크로 렌즈 유닛 사이의 거리는 상기 제1 빅셀 유닛과 상기 제2 빅셀 유닛 사이의 거리보다 작을 수 있다.
여기서, 상기 제1 N-컨택 및 상기 제2 N-컨택은 서로 동일하되, 상기 제1 P-컨택 및 상기 제2 P-컨택은 서로 상이할 수 있다.
여기서, 상기 제1 P-컨택 및 상기 제2 P-컨택은 서로 동일하되, 상기 제1 N-컨택 및 상기 제2 N-컨택은 서로 상이할 수 있다.
여기서, 상기 제1 빅셀 에미터로부터 출력된 제1 레이저는 상기 콜리메이션 컴포넌트를 통해 제1 다이버전스 각도  를 가지도록 콜리메이션 되며, 상기 스티어링 컴포넌트는 상기 제1 레이저를 스티어링하기 위한 제1 프리즘 엘리먼트를 포함하되, 상기 제1 프리즘 엘리먼트의 굴절률이 n 이며, 상기 제1 프리즘 엘리먼트의 경사각이
를 가지도록 콜리메이션 되며, 상기 스티어링 컴포넌트는 상기 제1 레이저를 스티어링하기 위한 제1 프리즘 엘리먼트를 포함하되, 상기 제1 프리즘 엘리먼트의 굴절률이 n 이며, 상기 제1 프리즘 엘리먼트의 경사각이  인 경우 상기 제1 프리즘 엘리먼트의 경사각은
인 경우 상기 제1 프리즘 엘리먼트의 경사각은  를 만족하도록 형성될 수 있다.
를 만족하도록 형성될 수 있다.
여기서, 상기 제1 레이저가 상기 제1 프리즘 엘리먼트를 통해 상기 프리즘 어레이의 법선에 대하여 제1 각도로 스티어링 되는 경우 상기 제1 레이저가 상기 제1 프리즘 엘리먼트를 통해 반사되는 반사율이 10%이하가 되도록 상기 제1 각도가 25도 이하로 설정될 수 있다.
일 실시예에 따르면, 레이저를 이용하여 거리를 측정하는 라이다 장치로서, 레이저를 출력하는 복수개의 레이저 출력 소자를 포함하는 레이저 출력부, 상기 레이저 출력부로부터 출력된 레이저가 일 지점에서 반사된 경우 반사된 레이저를 수광하는 디텍터부를 포함하되, 상기 레이저 출력부는 제1 레이저 출력 소자 및 제2 레이저 출력 소자를 포함하고, 상기 제1 레이저 출력 소자로부터 출력되는 제1 레이저와 상기 제2 레이저 출력 소자로부터 출력되는 제2 레이저는 상기 라이다 장치로부터 제1 거리만큼 이격된 지점에서 각각 제1 광밀도(Light density) 및 제2 광밀도를 가지도록 출력되며, 상기 제1 레이저 출력 소자 및 상기 제2 레이저 출력소자사이의 거리에 따라서 상기 제1 레이저와 상기 제2 레이저가 상기 라이다 장치로부터 오버랩되는 거리가 결정 되되, 상기 제1 레이저 및 상기 제2 레이저가 상기 라이다 장치로부터 제2 거리만큼 이격된 지점에서 오버랩 되는 경우, 상기 제1 레이저 출력 소자 및 상기 제2 레이저 출력 소자 사이의 거리는 상기 제2 거리에서 상기 제1 및 제2 레이저가 오버랩 되는 영역의 광밀도가 상기 제1 광밀도 이하가 되고, 상기 라이다 장치로부터 거리가 멀어질수록 상기 제1 레이저와 상기 제2 레이저가 오버랩되는 영역의 크기가 커지며, 상기 라이다 장치로부터 100m 거리에서 상기 제1 레이저와 상기 제2 레이저가 오버랩되는 영역의 크기가 100m 거리에서 상기 제1 레이저의 조사 영역의 80%이상이 되도록 설정되며, 상기 제2 거리는 상기 제1 거리보다 먼 라이다 장치가 제공될 수 있다.
여기서, 상기 제1 광밀도는 사람의 눈 건강에 영향을 미치지 않는 기준 광밀도일 수 있다.
여기서, 상기 제1 거리는 안전등급 산출을 위한 기준 거리일 수 있다.
여기서, 상기 복수개의 레이저 출력 소자는 복수개의 빅셀 에미터(VCSEL Emitter)를 포함하는 빅셀 유닛(VCSEL Unit)일 수 있다.
여기서, 상기 제1 레이저와 상기 제2 레이저가 오버랩되는 영역의 크기가 상기 라이다 장치로부터 200m 거리에서 상기 제1 레이저의 조사 영역 크기의 90%이상이 되도록 상기 제1 및 제2 레이저 출력 소자 사이의 거리가 설정될 수 있다.
여기서, 상기 라이다 장치는 상기 제1 레이저 출력 소자 및 상기 제2 레이저 출력 소자의 동작을 제어하며, 상기 일 지점과의 거리를 측정하는 제어부를 포함하며, 상기 제어부는 제1 시점에서 상기 제1 레이저 출력 소자를 동작시켜 상기 일지점을 향해 상기 제1 레이저를 출력하도록 제어하고, 상기 제1 시점에서 출력된 상기 제1 레이저를 이용하여 상기 일 지점에 대한 거리를 측정하지 못한 경우, 상기 제1 시점과 상이한 제2 시점에서 상기 제1 및 제2 레이저 출력 소자를 동작시켜 상기 일 지점을 향해 상기 제1 및 제2 레이저를 출력하도록 제어하고, 상기 제1 시점에서 출력된 상기 제1 레이저를 이용하여 상기 일 지점에 대한 거리를 측정한 경우, 상기 제1 시점과 상이한 제3 시점에서 상기 제1 레이저 출력 소자를 동작시켜 상기 일 지점을 향해 상기 제1 레이저를 출력하도록 제어할 수 있다.
여기서, 상기 레이저 출력부는 제3 레이저 출력 소자 및 제4 레이저 출력 소자를 더 포함하며, 상기 제3 레이저 출력 소자로부터 출력되는 제3 레이저와 상기 제4 레이저 출력 소자로부터 출력되는 제4 레이저는 상기 라이다 장치로부터 상기 제1 거리만큼 이격된 지점에서 각각 제3 및 제4 광밀도를 가지도록 출력되며, 상기 제1, 제2 및 제3 레이저가 상기 라이다 장치로부터 제3 거리만큼 이격된 지점에서 오버랩 되는 경우, 상기 제1, 제2 및 제3 레이저 출력 소자 사이의 거리는 상기 제3 거리에서 상기 제1, 제2 및 제3 레이저가 오버랩 되는 영역의 광밀도가 상기 제1 광밀도 이하가 되도록 설정되며, 상기 제1, 제2, 제3 및 제4 레이저가 상기 라이다 장치로부터 제4 거리만큼 이격된 지점에서 오버랩 되는 경우, 상기 제1, 제2, 제3 및 제4 레이저 출력 소자 사이의 거리는 상기 제4 거리에서 상기 제1, 제2, 제3 및 제4 레이저가 오버랩 되는 영역의 광밀도가 상기 제1 광밀도 이하가 되도록 설정될 수 있다.
여기서, 상기 제1 광밀도는 사람의 눈 건강에 영향을 미치지 않는 기준 광밀도일 수 있다.
여기서, 상기 라이다 장치는 상기 제1, 제2 제3 및 제4 레이저 출력 소자의 동작을 제어하며, 상기 일 지점과의 거리를 측정하는 제어부를 포함하며, 상기 제어부는 제1 시점에서 상기 제1 레이저 출력 소자를 동작시켜 상기 일 지점을 향해 상기 제1 레이저를 출력하도록 제어하며, 상기 제1 시점에서 출력된 상기 제1 레이저를 이용하여 상기 일 지점에 대한 거리를 측정하지 못한 경우, 상기 제1 시점과 상이한 제2 시점에서 상기 제1 및 제2 레이저 출력 소자를 동작시켜 상기 일 지점을 향해 상기 제1 및 제2 레이저를 출력하도록 제어하고, 상기 제1 시점에서 출력된 상기 제1 레이저를 이용하여 상기 일 지점에 대한 거리를 측정한 경우, 상기 제1 시점과 상이한 제3 시점에서 상기 제1 레이저 출력 소자를 동작시켜 상기 일 지점을 향해 상기 제1 레이저를 출력하도록 제어하며, 상기 제2 시점에서 출력된 상기 제1 및 제2 레이저를 이용하여 상기 일 지점에 대한 거리를 측정하지 못한 경우, 상기 제2 시점과 상이한 제4 시점에서 상기 제1, 제2 및 제3 레이저 출력 소자를 동작시켜 상기 일 지점을 향해 상기 제1, 제2 및 제3 레이저를 출력하도록 제어하고, 상기 제2 시점에서 출력된 상기 제1 및 제2 레이저를 이용하여 상기 일 지점에 대한 거리를 측정한 경우, 상기 제2 시점과 상이한 제5 시점에서 상기 제1 및 제2 레이저 출력 소자를 동작시켜 상기 일 지점을 향해 상기 제1 및 제2 레이저를 출력하도록 제어할 수 있다.
다른 일 실시예에 따르면, 레이저를 이용하여 거리를 측정하는 라이다 장치 등에 이용되는 레이저 출력 디바이스로서, 적어도 하나 이상의 빅셀 에미터(VCSEL Emitter : Vertical Cavity surface Emitting Laser Emitter)를 포함하는 제1 빅셀 유닛(VCSEL Unit), 적어도 하나 이상의 빅셀 에미터를 포함하되, 상기 제1 빅셀 유닛으로부터 출력되는 제1 레이저의 스티어링 각도(Steering angle)와 상이한 스티어링 각도로 제2 레이저를 조사하는 제2 빅셀 유닛, 적어도 하나 이상의 빅셀 에미터를 포함하되, 상기 제2 레이저의 스티어링 각도와 상이하며, 상기 제1 레이저의 스티어링 각도와 동일한 스티어링 각도로 제3 레이저를 조사하는 제3 빅셀 유닛, 적어도 하나 이상의 빅셀 에미터를 포함하되, 상기 제1 및 제3 레이저의 스티어링 각도와 상이하며, 상기 제2 레이저의 스티어링 각도와 동일한 스티어링 각도로 제4 레이저를 조사하는 제4 빅셀 유닛 및 상기 제1, 제2, 제3 및 제4 빅셀 유닛의 동작을 제어하는 제어부를 포함하되, 상기 제어부는 제1 시점에 상기 제1 및 제3 레이저를 출력하도록 상기 제1 및 제3 빅셀 유닛을 동작시키되, 상기 제2 및 제4 빅셀 유닛을 오프시키고, 상기 제1 시점와 상이한 제2 시점에 상기 제2 및 제4 레이저를 출력하도록 상기 제2 및 제4 빅셀 유닛을 동작시키되, 상기 제1 및 제3 빅셀 유닛을 오프시키며, 상기 제1 및 제3 레이저가 상기 레이저 출력 디바이스로부터 일정거리 이상에서 오버랩되도록 상기 제1 및 제3 빅셀 유닛은 제1 거리 이상 이격되어 배치되고, 상기 제2 및 제4 레이저가 상기 레이저 출력 디바이스로부터 일정거리 이상에서 오버랩되도록 상기 제2 및 제4 빅셀 유닛은 제2 거리 이상 이격되어 배치되며, 상기 제1 및 제2 빅셀 유닛은 서로 인접하여 배치되도록 제3 거리 이하로 이격되어 배치되고, 상기 제1 및 제2 거리는 상기 제3 거리보다 큰 레이저 출력 디바이스가 제공될 수 있다.
여기서, 상기 제1 거리와 상기 제2 거리는 서로 상이할 수 있다.
여기서, 상기 제1 내지 제4 빅셀 유닛은 상기 제1 및 제3 레이저와 상기 제2 및 제4 레이저가 각각 상기 레이저 출력 디바이스로부터 10cm 이상에서 오버랩 되도록 배치될 수 있다.
여기서, 상기 제1 내지 제4 빅셀 유닛은 하나의 빅셀 어레이(VCSEL Array)에 포함될 수 있다.
여기서, 상기 제1 및 제3 레이저가 오버랩 되는 영역의 크기가 상기 레이저 출력 디바이스로부터 100m 떨어진 거리에서 상기 제1 레이저의 조사 영역 크기의 80%이상이 되도록 상기 제1 거리가 설정될 수 있다.
여기서, 상기 제2 및 제4 레이저가 오버랩 되는 영역의 크기가 상기 레이저 출력 디바이스로부터 100m 떨어진 거리에서 상기 제2 레이저의 조사 영역 크기의 80%이상이 되도록 상기 제2 거리가 설정될 수 있다.
또 다른 일 실시예에 따르면, 레이저를 이용하여 거리를 측정하는 라이다 장치 등에 이용되는 레이저 출력 디바이스로서, 적어도 하나 이상의 빅셀 에미터(VCSEL Emitter : Vertical Cavity surface Emitting Laser Emitter)를 포함하는 제1 빅셀 유닛(VCSEL Unit), 적어도 하나 이상의 빅셀 에미터를 포함하되, 상기 제1 빅셀 유닛으로부터 출력되는 제1 레이저의 스티어링 각도(Steering angle)와 상이한 스티어링 각도로 제2 레이저를 조사하는 제2 빅셀 유닛, 적어도 하나 이상의 빅셀 에미터를 포함하되, 상기 제2 레이저의 스티어링 각도와 상이하며, 상기 제1 레이저의 스티어링 각도와 동일한 스티어링 각도로 제3 레이저를 조사하는 제3 빅셀 유닛, 적어도 하나 이상의 빅셀 에미터를 포함하되, 상기 제1 및 제3 레이저의 스티어링 각도와 상이하며, 상기 제2 레이저의 스티어링 각도와 동일한 스티어링 각도로 제4 레이저를 조사하는 제4 빅셀 유닛 및 상기 제1, 제2, 제3 및 제4 빅셀 유닛의 동작을 제어하는 제어부를 포함하되, 상기 제어부는 제1 시점에 상기 제1 및 제3 레이저를 출력하도록 상기 제1 및 제3 빅셀 유닛을 동작시키되, 상기 제2 및 제4 빅셀 유닛을 오프시키고, 상기 제1 시점와 상이한 제2 시점에 상기 제2 및 제4 레이저를 출력하도록 상기 제2 및 제4 빅셀 유닛을 동작시키되, 상기 제1 및 제3 빅셀 유닛을 오프시키며, 상기 제1 및 제2 빅셀 유닛은 제1 빅셀 어레이(VCSEL Array)에 포함되며, 상기 제3 및 제4 빅셀 유닛은 제2 빅셀 어레이(VCSEL Array)에 포함되고, 상기 제1 및 제3 레이저가 일정 거리 이상에서 오버랩되되, 상기 레이저 출력 디바이스로부터 거리가 멀어질수록 상기 제1 및 제3 레이저가 오버랩되는 영역이 증가 하고, 상기 제2 및 제4 레이저가 일정 거리 이상에서 오버랩되되, 상기 레이저 출력 디바이스로부터 거리가 멀어질수록 상기 제2 및 제4 레이저가 오버랩되는 영역이 증가하도록 상기 제1 및 제2 빅셀 어레이는 동일 평면 상에서 이격되어 배치되는 레이저 출력 디바이스가 제공될 수 있다.
여기서, 상기 제1 빅셀 유닛의 상기 제1 빅셀 어레이에서의 위치는 상기 제3 빅셀 유닛의 상기 제2 빅셀 어레이에서의 위치와 대응될 수 있다.
여기서, 상기 제1 빅셀 유닛의 상기 제1 빅셀 어레이에서의 위치는 상기 제3 빅셀 유닛의 상기 제2 빅셀 어레이에서의 위치와 상이할 수 있다.
여기서, 상기 제1 빅셀 어레이 및 상기 제2 빅셀 어레이는 동일한 기판 상에 위치할 수 있다.
여기서, 상기 제1 빅셀 어레이 및 상기 제2 빅셀 어레이는 제1 및 제2 스티어링 컴포넌트를 포함하며, 상기 제1 스티어링 컴포넌트 및 상기 제2 스티어링 컴포넌트의 형상은 상호간에 동일할 수 있다.
여기서, 상기 제1 및 제3 레이저가 오버랩 되는 영역의 크기는 상기 레이저 출력 디바이스로부터 100m 떨어진 거리에서 상기 제1 레이저의 조사 영역 크기의 80%이상이 될 수 있다.
여기서, 상기 제2 및 제4 레이저가 오버랩 되는 영역의 크기는 상기 레이저 출력 디바이스로부터 100m 떨어진 거리에서 상기 제2 레이저의 조사 영역 크기의 80%이상이 될 수 있다.
또 다른 일 실시예에 따르면, 레이저를 이용하여 거리를 측정하는 라이다 장치로서, 적어도 하나 이상의 빅셀 에미터(VCSEL Emitter : Vertical Cavity surface Emitting Laser Emitter)를 포함하는 제1 빅셀 유닛(VCSEL Unit), 적어도 하나 이상의 빅셀 에미터를 포함하되, 상기 제1 빅셀 유닛으로부터 출력되는 제1 레이저의 스티어링 각도(Steering angle)와 상이한 스티어링 각도로 제2 레이저를 조사하는 제2 빅셀 유닛, 적어도 하나 이상의 빅셀 에미터를 포함하되, 상기 제2 레이저의 스티어링 각도와 상이하며, 상기 제1 레이저의 스티어링 각도와 동일한 스티어링 각도로 제3 레이저를 조사하는 제3 빅셀 유닛, 적어도 하나 이상의 빅셀 에미터를 포함하되, 상기 제1 및 제3 레이저의 스티어링 각도와 상이하며, 상기 제2 레이저의 스티어링 각도와 동일한 스티어링 각도로 제4 레이저를 조사하는 제4 빅셀 유닛, 상기 제1 내지 제4 레이저 중 적어도 일부의 레이저가 대상체로부터 반사된 경우 반사된 레이저를 수광하는 디텍터부, 상기 제1, 제2, 제3 및 제4 빅셀 유닛의 동작을 제어하되, 대상체로부터 반사된 레이저를 이용하여 대상체 대한 거리 정보를 획득하는 제어부를 포함하되, 상기 제어부는 제1 시점에 상기 제1 레이저를 출력하도록 상기 제1 빅셀 유닛을 동작시키며, 상기 제1 시점과 상이한 제2 시점에 상기 제2 레이저를 출력하도록 상기 제2 빅셀 유닛을 동작 시키고, 상기 제1 시점에 제1 대상체에 대한 거리 정보를 획득하지 못한 경우 상기 제어부는 제3 시점에 상기 제1 및 제3 레이저를 출력하도록 상기 제1 및 제3 빅셀 유닛을 동작시키며, 상기 제2 시점에 제2 대상체에 대한 거리 정보를 획득한 경우 상기 제어부는 제4 시점에 상기 제2 레이저를 출력하도록 상기 제2 빅셀 유닛을 동작시키는 라이다 장치가 제공될 수 있다.
여기서, 상기 제1 및 제3 레이저가 상기 레이저 출력 디바이스로부터 제1 거리 이상에서 오버랩되도록 상기 제1 및 제3 빅셀 유닛은 제2 거리 이상 이격되어 배치되고, 상기 제2 및 제4 레이저가 상기 레이저 출력 디바이스로부터 상기 제1 거리 이상에서 오버랩되도록 상기 제2 및 제4 빅셀 유닛은 제3 거리 이상 이격되어 배치될 수 있다.
여기서, 상기 제1 거리는 상기 제1 거리는 안전등급 산출을 위한 기준 거리일 수 있다.
여기서, 상기 제1 레이저와 상기 제3 레이저가 오버랩되는 영역의 크기가 상기 라이다 장치로부터 100m 떨어진 거리에서 상기 제1 레이저의 조사 영역 크기의 80% 이상이 되며, 상기 제1 레이저와 상기 제3 레이저가 오버랩되는 영역의 크기가 상기 라이다 장치로부터 200m 거리에서 상기 제1 레이저의 조사 영역 크기의 90%이상이 될 수 있다.
또 다른 일 실시예에 따르면, 적어도 하나 이상의 빅셀 에미터(VCSEL Emitter : Vertical Cavity surface Emitting Laser Emitter)를 포함하는 복수개의 빅셀 유닛(VCSEL Unit)으로부터 출력되는 레이저를 이용하여 대상체와의 거리 정보를 획득하는 라이다 장치의 거리 정보 획득 방법으로서, 제1 시점에 제1 빅셀 유닛을 동작시켜 제1 레이저를 출력하는 단계, 상기 제1 시점과 상이한 제2 시점에 제2 빅셀 유닛을 동작시켜 상기 제1 레이저와 다른 각도로 제2 레이저를 출력하는 단계, 상기 제1 및 제2 시점과 상이한 제3 시점에 상기 제1 빅셀 유닛 및 제3 빅셀 유닛을 동작시켜 상기 제1 레이저와 동일한 각도로 조사되는 제3 레이저 및 상기 제1 레이저를 출력하는 단계, 상기 제3 시점에 조사된 상기 제1 및 제3 레이저가 제1 대상체에서 반사된 경우 상기 제1 대상체와 상기 라이다 장치 사이의 거리 정보를 획득하는 단계, 상기 제1 내지 제3 시점과 상이한 제4 시점에 상기 제2 빅셀 유닛을 동작시켜 상기 제2 레이저를 출력하는 단계 및 상기 제4 시점에 조사된 상기 제2 레이저가 제2 대상체에서 반사된 경우 상기 제2 대상체와 상기 라이다 장치 사이의 거리 정보를 획득하는 단계를 포함하되, 상기 제3 시점에서 출력된 제1 및 제3 레이저에 기초하여 획득된 제1 대상체와의 거리 정보의 거리 값은 상기 제4 시점에서출력된 제2 레이저에 기초하여 획득된 제2 대상체와의 거리 정보의 거리 값 보다 큰 거리 정보 획득 방법이 제공될 수 있다.
또 다른 일 실시예에 따르면, 차량 주변의 대상체를 감지하여 이를 이용하여 자율적으로 주행 가능한 자율 주행 차량으로서, 차량 본체 및 대상체와의 거리를 측정하기 위한 라이다 장치를 포함하되, 상기 라이다 장치는 적어도 하나 이상의 빅셀 에미터(VCSEL Emitter : Vertical Cavity surface Emitting Laser Emitter)를 포함하는 제1 빅셀 유닛(VCSEL Unit), 적어도 하나 이상의 빅셀 에미터를 포함하되, 상기 제1 빅셀 유닛으로부터 출력되는 제1 레이저의 스티어링 각도(Steering angle)와 상이한 스티어링 각도로 제2 레이저를 조사하는 제2 빅셀 유닛, 적어도 하나 이상의 빅셀 에미터를 포함하되, 상기 제2 레이저의 스티어링 각도와 상이하며, 상기 제1 레이저의 스티어링 각도와 동일한 스티어링 각도로 제3 레이저를 조사하는 제3 빅셀 유닛, 적어도 하나 이상의 빅셀 에미터를 포함하되, 상기 제1 및 제3 레이저의 스티어링 각도와 상이하며, 상기 제2 레이저의 스티어링 각도와 동일한 스티어링 각도로 제4 레이저를 조사하는 제4 빅셀 유닛 및 상기 제1, 제2, 제3 및 제4 빅셀 유닛의 동작을 제어하는 제어부를 포함하되, 상기 제어부는 제1 시점에 상기 제1 및 제3 레이저를 출력하도록 상기 제1 및 제3 빅셀 유닛을 동작시키되, 상기 제2 및 제4 빅셀 유닛을 오프시키고, 상기 제1 시점와 상이한 제2 시점에 상기 제2 및 제4 레이저를 출력하도록 상기 제2 및 제4 빅셀 유닛을 동작시키되, 상기 제1 및 제3 빅셀 유닛을 오프시키는 자율 주행 차량이 제공될 수 있다.
여기서, 상기 제1 및 제3 레이저가 상기 레이저 출력 디바이스로부터 일정거리 이상에서 오버랩되도록 상기 제1 및 제3 빅셀 유닛은 제1 거리 이상 이격되어 배치되고, 상기 제2 및 제4 레이저가 상기 레이저 출력 디바이스로부터 일정거리 이상에서 오버랩되도록 상기 제2 및 제4 빅셀 유닛은 제2 거리 이상 이격되어 배치되며, 상기 제1 및 제2 빅셀 유닛은 서로 인접하여 배치되도록 제3 거리 이하로 이격되어 배치되고, 상기 제1 및 제2 거리는 상기 제3 거리보다 클 수 있다.
이하에서는 본 발명의 라이다 장치를 설명한다.
라이다 장치는 레이저를 이용하여 대상체와의 거리 및 대상체의 위치를 탐지하기 위한 장치이다. 예를 들어, 라이다 장치는 레이저를 출력할 수 있고, 출력된 레이저가 대상체에서 반사된 경우 반사된 레이저를 수신하여 대상체와 라이다 장치의 거리 및 대상체의 위치를 측정할 수 있다. 이때, 대상체의 거리 및 위치는 좌표계를 통해 표현될 수 있다. 예를 들어, 대상체의 거리 및 위치는 구좌표계(r, θ, φ)로 표현될 수 있다. 다만, 이에 한정되는 것은 아니며, 직교좌표계(X, Y, Z) 또는 원통 좌표계(r, θ, z) 등으로 표현될 수 있다.
또한, 라이다 장치는 대상체의 거리를 측정하기 위해 라이다 장치에서 출력되어 대상체에서 반사된 레이저를 이용할 수 있다.
일 실시예에 따른 라이다 장치는 대상체의 거리를 측정하기 위해 레이저가 출력된 후 감지되기 까지 레이저의 비행 시간 (TOF : Time Of Flight)을 이용할 수 있다. 예를 들어, 라이다 장치는 출력된 레이저의 출력 시간에 기초한 시간 값과 대상체에서 반사되어 감지된 레이저의 감지된 시간에 기초한 시간 값의 차이를 이용하여, 대상체의 거리를 측정할 수 있다.
또한, 라이다 장치는 출력된 레이저가 대상체를 거치지 않고 바로 감지된 시간 값과 대상체에서 반사되어 감지된 레이저의 감지된 시간에 기초한 시간 값의 차이를 이용하여 대상체의 거리를 측정할 수 있다.
라이다 장치가 제어부에 의해 레이저 빔을 출광하기 위한 트리거 신호를 보내는 시점과 실제 레이저 출력 소자에서 레이저 빔이 출력되는 시간인 실제 출광 시점은 차이가 있을 수 있다. 상기 트리거 신호의 시점과 실제 출광 시점 사이에서는 실제로 레이저 빔이 출력되지 않았으므로, 레이저의 비행 시간에 포함되면 정밀도가 감소할 수 있다.
레이저 빔의 비행 시간 측정에 정밀도를 향상시키기 위해서는, 레이저 빔의 실제 출광 시점을 이용할 수 있다. 그러나, 레이저 빔의 실제 출광 시점을 파악하는 것은 어려울 수 있다. 그러므로, 레이저 출력 소자에서 출력된 레이저 빔은 출력 되자마자, 또는 출력된 후 대상체를 거치지 않고 곧바로 센서부로 전달되어야 한다.
예를 들어, 레이저 출력 소자의 상부에 옵틱이 배치되어, 상기 옵틱에 의해 레이저 출력 소자에서 출력된 레이저 빔은 대상체를 거치지 않고 바로 수광부에 감지될 수 있다. 상기 옵틱은 미러, 렌즈, 프리즘, 메타표면 등이 될 수 있으나, 이에 한정되지 않는다. 상기 옵틱은 하나일 수 있으나, 복수 개일 수 있다.
또한, 예를 들어, 레이저 출력 소자의 상부에 센서부가 배치되어, 레이저 출력 소자에서 출력된 레이저 빔은 대상체를 거치지 않고 바로 센서부에 감지될 수 있다. 상기 센서부는 레이저 출력 소자와 1mm, 1um, 1nm 등의 거리를 두고 이격될 수 있으나, 이에 한정되지 않는다. 또는, 상기 센서부는 레이저 출력 소자와 이격되지 않고 인접하게 배치될 수도 있다. 상기 센서부와 상기 레이저 출력 소자 사이에는 옵틱이 존재할 수도 있으나, 이에 한정되지 않는다.
또한, 일 실시예에 따른 라이다 장치는 대상체의 거리를 측정하기 위해 비행 시간 외에도 삼각 측량법(Triangulation method), 간섭계 방법(Interferometry method), 위상 변화 측정법(Phase shift measurement) 등을 이용할 수 있으나, 이에 한정되지 않는다.
일 실시예에 따른 라이다 장치는 차량에 설치될 수 있다. 예를 들어, 라이다 장치는 차량의 루프, 후드, 헤드램프 또는 범퍼 등에 설치될 수 있다.
또한, 일 실시예에 따른 복수 개의 라이다 장치가 차량에 설치될 수 있다. 예를 들어, 라이다 장치 2개가 차량의 루프에 설치되는 경우, 하나의 라이다 장치는 전방을 관측하기 위한 것이고, 나머지 하나는 후방을 관측하기 위한 것일 수 있으나, 이에 한정되지 않는다. 또한, 예를 들어, 라이다 장치 2개가 차량의 루프에 설치되는 경우, 하나의 라이다 장치는 좌측을 관측하기 위한 것이고, 나머지 하나는 우측을 관측하기 위한 것일 수 있으나, 이에 한정되지 않는다.
또한, 일 실시예에 따른 라이다 장치가 차량에 설치될 수 있다. 예를 들어, 라이다 장치가 차량 내부에 설치되는 경우, 주행 중 운전자의 제스쳐를 인식하기 위한 것일 수 있으나, 이에 한정되지 않는다. 또한 예를 들어, 라이다 장치가 차량 내부 또는 차량 외부에 설치되는 경우, 운전자의 얼굴을 인식하기 위한 것일 수 있으나, 이에 한정되지 않는다.
일 실시예에 따른 라이다 장치는 무인 비행체에 설치될 수 있다. 예를 들어, 라이다 장치는 무인항공기 시스템(UAV System), 드론(Drone), RPV(Remote Piloted Vehicle), UAVs(Unmanned Aerial Vehicle System), UAS(Unmanned Aircraft System), RPAV(Remote Piloted Air/Aerial Vehicle) 또는 RPAS(Remote Piloted Aircraft System) 등에 설치될 수 있다.
또한, 일 실시예에 따른 복수 개의 라이다 장치가 무인 비행체에 설치될 수 있다. 예를 들어, 라이다 장치 2개가 무인 비행체에 설치되는 경우, 하나의 라이다 장치는 전방을 관측하기 위한 것이고, 나머지 하나는 후방을 관측하기 위한 것일 수 있으나, 이에 한정되지 않는다. 또한, 예를 들어, 라이다 장치 2개가 무인 비행체에 설치되는 경우, 하나의 라이다 장치는 좌측을 관측하기 위한 것이고, 나머지 하나는 우측을 관측하기 위한 것일 수 있으나, 이에 한정되지 않는다.
일 실시예에 따른 라이다 장치는 로봇에 설치될 수 있다. 예를 들어, 라이다 장치는 개인용 로봇, 전문 로봇, 공공 서비스 로봇, 기타 산업용 로봇 또는 제조업용 로봇 등에 설치될 수 있다.
또한, 일 실시예에 따른 복수 개의 라이다 장치가 로봇에 설치될 수 있다. 예를 들어, 라이다 장치 2개가 로봇에 설치되는 경우, 하나의 라이다 장치는 전방을 관측하기 위한 것이고, 나머지 하나는 후방을 관측하기 위한 것일 수 있으나, 이에 한정되지 않는다. 또한, 예를 들어, 라이다 장치 2개가 로봇에 설치되는 경우, 하나의 라이다 장치는 좌측을 관측하기 위한 것이고, 나머지 하나는 우측을 관측하기 위한 것일 수 있으나, 이에 한정되지 않는다.
또한, 일 실시예에 따른 라이다 장치가 로봇에 설치될 수 있다. 예를 들어, 라이다 장치가 로봇에 설치되는 경우, 사람의 얼굴을 인식하기 위한 것일 수 있으나, 이에 한정되지 않는다.
또한, 일 실시예에 따른 라이다 장치는 산업 보안을 위해 설치될 수 있다. 예를 들어, 라이다 장치는 산업 보안을 위해 스마트 공장에 설치될 수 있다.
또한, 일 실시예에 따른 복수 개의 라이다 장치가 산업 보안을 위해 스마트 공장에 설치될 수 있다. 예를 들어, 라이다 장치 2개가 스마트 공장에 설치되는 경우, 하나의 라이다 장치는 전방을 관측하기 위한 것이고, 나머지 하나는 후방을 관측하기 위한 것일 수 있으나, 이에 한정되지 않는다. 또한, 예를 들어, 라이다 장치 2개가 스마트 공장에 설치되는 경우, 하나의 라이다 장치는 좌측을 관측하기 위한 것이고, 나머지 하나는 우측을 관측하기 위한 것일 수 있으나, 이에 한정되지 않는다.
또한, 일 실시예에 따른 라이다 장치가 산업 보안을 위해 설치될 수 있다. 예를 들어, 라이다 장치가 산업 보안을 위해 설치되는 경우, 사람의 얼굴을 인식하기 위한 것일 수 있으나, 이에 한정되지 않는다.
이하에서는 라이다 장치의 구성요소들의 다양한 실시예들에 대하여 상세하게 설명한다.
도 1은 일 실시예에 따른 라이다 장치를 설명하기 위한 도면이다.
도 1을 참조하면, 일 실시예에 따른 라이다 장치(1000)는 레이저 출력부(100)를 포함할 수 있다.
이때, 일 실시예에 따른 레이저 출력부(100)는 레이저를 출사할 수 있다.
또한, 레이저 출력부(100)는 하나 이상의 레이저 출력 소자를 포함할 수 있다. 예를 들어, 레이저 출력부(100)는 단일 레이저 출력 소자를 포함할 수 있으며, 복수 개의 레이저 출력 소자를 포함할 수도 있고, 또한 복수 개의 레이저 출력 소자를 포함하는 경우 복수 개의 레이저 출력 소자가 하나의 어레이를 구성할 수 있다.
또한, 레이저 출력부(100)는 레이저 다이오드(Laser Diode:LD), Solid-state laser, High power laser, Light entitling diode(LED), Vertical Cavity Surface Emitting Laser(VCSEL), External cavity diode laser(ECDL) 등을 포함할 수 있으나, 이에 한정되지 않는다.
또한, 레이저 출력부(100)는 일정 파장의 레이저를 출력할 수 있다. 예를 들어, 레이저 출력부(100)는 905nm대역의 레이저 또는 1550nm 대역의 레이저를 출력할 수 있다. 또한, 예를 들어, 레이저 출력부(100)는 940nm 대역의 레이저를 출력할 수 있다. 또한, 예를 들어, 레이저 출력부(100)는 800nm 내지 1000nm 사이의 복수 개의 파장을 포함하는 레이저를 출력할 수 있다. 또한, 레이저 출력부(100)가 복수 개의 레이저 출력 소자를 포함하는 경우, 복수 개의 레이저 출력 소자의 일부는 905nm 대역의 레이저를 출력할 수 있으며, 다른 일부는 1500nm 대역의 레이저를 출력할 수 있다.
다시 도 1을 참조하면, 일 실시예에 따른 라이다 장치(1000)는 옵틱부(200)를 포함할 수 있다.
상기 옵틱부는 본 발명에 대한 설명에 있어서, 스티어링부, 스캔부 등으로 다양하게 표현될 수 있으나, 이에 한정되지 않는다.
이때, 일 실시예에 따른 옵틱부(200)는 레이저의 비행 경로를 변경할 수 있다. 예를 들어, 옵틱부(200)는 레이저 출력부(100)에서 출사된 레이저가 스캔 영역을 향하도록 레이저의 비행 경로를 변경할 수 있다. 또한, 예를 들어, 스캔 영역 내에 위치하는 대상체로부터 반사된 레이저가 센서부를 향하도록 레이저의 비행 경로를 변경할 수 있다.
또한, 일 실시예에 따른 옵틱부(200)는 레이저를 반사함으로써 레이저의 비행 경로를 변경할 수 있다. 예를 들어, 옵틱부(200)는 레이저 출력부(100)에서 출사된 레이저를 반사하여, 레이저가 스캔 영역을 향하도록 레이저의 비행 경로를 변경할 수 있다. 또한, 예를 들어, 스캔 영역 내에 위치하는 대상체로부터 반사된 레이저가 센서부를 향하도록 레이저의 비행 경로를 변경할 수 있다.
또한, 일 실시예에 따른 옵틱부(200)는 레이저를 반사하기 위하여 다양한 광학 수단들을 포함할 수 있다. 예를 들어, 옵틱부(200)는 미러(mirror), 공진 스캐너(Resonance scanner), 멤스 미러(MEMS mirror), VCM(Voice Coil Motor), 다면 미러(Polygonal mirror), 회전 미러(Rotating mirror) 또는 갈바노 미러(Galvano mirror) 등을 포함할 수 있으나, 이에 한정되지 않는다.
또한, 일 실시예에 따른 옵틱부(200)는 레이저를 굴절시킴으로써 레이저의 비행 경로를 변경할 수 있다. 예를 들어, 옵틱부(200)는 레이저 출력부(100)에서 출사된 레이저를 굴절시켜, 레이저가 스캔 영역을 향하도록 레이저의 비행 경로를 변경할 수 있다. 또한, 예를 들어, 스캔 영역 내에 위치하는 대상체로부터 반사된 레이저가 센서부를 향하도록 레이저의 비행 경로를 변경할 수 있다.
또한, 일 실시예에 따른 옵틱부(200)는 레이저를 굴절시키기 위하여 다양한 광학 수단들을 포함할 수 있다. 예를 들어, 옵틱부(200)는 렌즈(lens), 프리즘(prism), 마이크로렌즈(Micro lens) 또는 액체 렌즈(Microfluidie lens) 등을 포함할 수 있으나, 이에 한정되지 않는다.
또한, 일 실시예에 따른 옵틱부(200)는 레이저의 위상을 변화시킴으로써 레이저의 비행 경로를 변경할 수 있다. 예를 들어, 옵틱부(200)는 레이저 출력부(100)에서 출사된 레이저의 위상을 변화시켜, 레이저가 스캔 영역을 향하도록 레이저의 비행 경로를 변경할 수 있다. 또한, 예를 들어, 스캔 영역 내에 위치하는 대상체로부터 반사된 레이저가 센서부를 향하도록 레이저의 비행 경로를 변경할 수 있다.
또한, 일 실시예에 따른 옵틱부(200)는 레이저의 위상을 변화시키기 위하여 다양한 광학 수단들을 포함할 수 있다. 예를 들어, 옵틱부(200)는 OPA(Optical Phased Array), 메타 렌즈(Meta lens) 또는 메타 표면(Metasurface) 등을 포함할 수 있으나, 이에 한정되지 않는다.
또한, 일 실시예에 따른 옵틱부(200)는 하나 이상의 광학 수단을 포함할 수 있다. 또한, 예를 들어, 옵틱부(200)는 복수 개의 광학 수단을 포함할 수 있다.
다시 도 1을 참조하면, 일 실시예에 따른 라이다 장치(100)는 센서부(300)를 포함할 수 있다.
상기 센서부는 본 발명에 대한 설명에 있어서 수광부, 수신부 등으로 다양하게 표현될 수 있으나, 이에 한정되지 않는다.
이때, 일 실시예에 따른 센서부(300)는 레이저를 감지할 수 있다. 예를 들어, 센서부는 스캔 영역 내에 위치하는 대상체에서 반사된 레이저를 감지할 수 있다.
또한, 일 실시예에 따른 센서부(300)는 레이저를 수신할 수 있으며, 수신된 레이저를 기초로 전기 신호를 생성할 수 있다. 예를 들어, 센서부(300)는 스캔 영역 내에 위치하는 대상체에서 반사된 레이저를 수신할 수 있으며, 이를 기초로 전기 신호를 생성할 수 있다. 또한, 예를 들어, 센서부(300)는 스캔 영역 내에 위치하는 대상체에서 반사된 레이저를 하나 이상의 광학수단을 통해 수신할 수 있으며, 이를 기초로 전기 신호를 생성할 수 있다. 또한, 예를 들어, 센서부(300)는 스캔 영역 내에 위치하는 대상체에서 반사된 레이저를 광학 필터를 거쳐 수신할 수 있으며, 이를 기초로 전기 신호를 생성할 수 있다.
또한, 일 실시예에 따른 센서부(300)는 생성된 전기 신호를 기초로 레이저를 감지할 수 있다. 예를 들어, 센서부(300)는 미리 정해진 문턱 값과 생성된 전기 신호의 크기를 비교하여 레이저를 감지할 수 있으나, 이에 한정되지 않는다. 또한, 예를 들어, 센서부(300)는 미리 정해진 문턱 값과 생성된 전기 신호의 rising edge, falling edge 또는 rising edge와 falling edge의 중앙값을 비교하여 레이저를 감지할 수 있으나, 이에 한정되지 않는다. 또한, 예를 들어, 센서부(300)는 미리 정해진 문턱 값과 생성된 전기 신호의 피크 값을 비교하여 레이저를 감지할 수 있으나, 이에 한정되지 않는다.
또한, 일 실시예에 따른 센서부(300)는 다양한 센서 소자를 포함할 수 있다. 예를 들어, 센서부(300)는 PN 포토 다이오드, 포토트랜지스터, PIN 포토다이오드, APD(Avalanche Photodiode), SPAD(Single-photon avalanche diode), SiPM(Silicon PhotoMultipliers), TDC(Time to Digital Converter), Comparator, CMOS(Complementary metal-oxide-semiconductor) 또는 CCD(charge coupled device) 등을 포함할 수 있으나, 이에 한정되지 않는다.
예를 들어, 센서부(300)는 2D SPAD array일 수 있으나 이에 한정되지 않는다. 또한 예를 들어, SPAD array는 복수 개의 SPAD unit을 포함하고, SPAD unit은 복수 개의 SPAD(pixel)을 포함할 수 있다.
이때, 센서부(300)는 2D SPAD array를 이용하여 N번의 히스토그램(histogram)을 쌓을 수 있다. 예를 들어, 센서부(300)는 히스토그램을 이용하여, 대상체로부터 반사되어 수광되는 레이저 빔의 수광 시점을 감지할 수 있다.
예를 들어, 센서부(300)는 히스토그램을 이용하여, 히스토그램의 피크(peak) 지점을 대상체로부터 반사되어 수광되는 레이저 빔의 수광 시점으로 감지할 수 있으나, 이에 한정되지 않는다. 또한 예를 들어, 센서부(300)는 히스토그램을 이용하여, 히스토그램이 미리 정해진 값 이상인 지점을 대상체로부터 반사되어 수광되는 레이저 빔의 수광시점으로 감지할 수 있으나, 이에 한정되지 않는다.
또한, 일 실시예에 따른 센서부(300)는 하나 이상의 센서 소자를 포함할 수 있다. 예를 들어, 센서부(300)는 단일 센서 소자를 포함할 수 있으며, 복수 개의 센서 소자를 포함할 수도 있다.
또한, 일 실시예에 따른 센서부(300)는 하나 이상의 광학 소자를 포함할 수 있다. 예를 들어, 센서부(300)는 Aperture, 마이크로 렌즈(Micro lens), 수렴 렌즈(converging lens) 또는 Diffuser 등을 포함할 수 있으나, 이에 한정되지 않는다.
또한, 일 실시예에 따른 센서부(300)는 하나 이상의 광학 필터(Optical Filter)를 포함할 수 있다. 센서부(300)는 대상체에서 반사된 레이저를 광학 필터를 거쳐 수신할 수 있다. 예를 들어, 센서부(300)는 Band pass filter, Dichroic filter, Guided-mode resonance filter, Polarizer, Wedge filter 등을 포함할 수 있으나, 이에 한정되지 않는다.
다시 도 1을 참조하면, 일 실시예에 따른 라이다 장치(1000)는 제어부(400)를 포함할 수 있다.
상기 제어부는 본 발명을 위한 설명에 있어너 컨트롤러 등으로 다양하게 표현될 수 있으나, 이에 한정되지 않는다.
이때, 일 실시예에 따른 제어부(400)는 레이저 출력부(100), 옵틱부(200) 또는 센서부(300)의 동작을 제어할 수 있다.
또한, 일 실시예에 따른 제어부(400)는 레이저 출력부(100)의 동작을 제어할 수 있다.
예를 들어, 제어부(400)는 레이저 출력부(100)에서 출력되는 레이저의 출력 시점을 제어할 수 있다. 또한, 제어부(400)는 레이저 출력부(100)에서 출력되는 레이저의 파워를 제어할 수 있다. 또한, 제어부(400)는 레이저 출력부(100)에서 출력되는 레이저의 펄스 폭(Pulse Width)를 제어할 수 있다. 또한, 제어부(400)는 레이저 출력부(100)에서 출력되는 레이저의 주기를 제어할 수 있다. 또한, 레이저 출력부(100)가 복수 개의 레이저 출력 소자를 포함하는 경우, 제어부(400)는 복수 개의 레이저 출력 소자 중 일부가 동작되도록 레이저 출력부(100)를 제어할 수 있다.
또한, 일 실시예에 따른 제어부(400)는 옵틱부(200)의 동작을 제어할 수 있다.
예를 들어, 제어부(400)는 옵틱부(200) 동작 속도를 제어할 수 있다. 구체적으로 옵틱부(200)가 회전 미러를 포함하는 경우 회전 미러의 회전 속도를 제어할 수 있으며, 옵틱부(200)가 멤스 미러(MEMS mirror)를 포함하는 경우 사이 멤스 미러의 반복 주기를 제어할 수 있으나, 이에 한정되지 않는다.
또한, 예를 들어, 제어부(400)는 옵틱부(200)의 동작 정도를 제어할 수 있다. 구체적으로, 옵틱부(200)가 멤스 미러를 포함하는 경우 멤스 미러의 동작 각도를 제어할 수 있으나, 이에 한정되지 않는다.
또한, 일 실시예에 따른 제어부(400)는 센서부(300)의 동작을 제어할 수 있다.
예를 들어, 제어부(400)는 센서부(300)의 민감도를 제어할 수 있다. 구체적으로, 제어부(400)는 미리 정해진 문턱 값을 조절하여 센서부(300)의 민감도를 제어할 수 있으나, 이에 한정되지 않는다.
또한, 예를 들어, 제어부(400)는 센서부(300)의 동작을 제어할 수 있다. 구체적으로, 제어부(400)는 센서부(300)의 On/Off를 제어할 수 있으며, 제어부(300)가 복수 개의 센서 소자를 포함하는 경우 복수 개의 센서 소자 중 일부의 센서 소자가 동작되도록 센서부(300)의 동작을 제어할 수 있다.
또한, 일 실시예에 따른 제어부(400)는 센서부(300)에서 감지된 레이저에 기초하여 라이다 장치(1000)로부터 스캔 영역 내에 위치하는 대상체까지의 거리를 판단할 수 있다.
예를 들어, 제어부(400)는 레이저 출력부(100)에서 레이저가 출력된 시점과 센서부(300)에서 레이저가 감지된 시점에 기초하여 스캔 영역 내에 위치하는 대상체까지의 거리를 판단할 수 있다. 또한, 예를 들어, 제어부(400)는 레이저 출력부(100)에서 레이저가 출력되어 대상체를 거치지 않고 바로 센서부(300)에서 레이저가 감지된 시점 및 대상체에서 반사된 레이저가 센서부(300)에서 감지된 시점에 기초하여 스캔 영역 내에 위치하는 대상체까지의 거리를 판단할 수 있다.
라이다 장치(1000)가 제어부(400)에 의해 레이저 빔을 출광하기 위한 트리거 신호를 보내는 시점과 실제 레이저 출력 소자에서 레이저 빔이 출력되는 시간인 실제 출광 시점은 차이가 있을 수 있다. 상기 트리거 신호의 시점과 실제 출광 시점 사이에서는 실제로 레이저 빔이 출력되지 않았으므로, 레이저의 비행 시간에 포함되면 정밀도가 감소할 수 있다.
레이저 빔의 비행 시간 측정에 정밀도를 향상시키기 위해서는, 레이저 빔의 실제 출광 시점을 이용할 수 있다. 그러나, 레이저 빔의 실제 출광 시점을 파악하는 것은 어려울 수 있다. 그러므로, 레이저 출력 소자에서 출력된 레이저 빔은 출력 되자마자, 또는 출력된 후 대상체를 거치지 않고 곧바로 센서부(300)로 전달되어야 한다.
예를 들어, 레이저 출력 소자의 상부에 옵틱이 배치되어, 상기 옵틱에 의해 레이저 출력 소자에서 출력된 레이저 빔은 대상체를 거치지 않고 바로 센서부(300)에 감지될 수 있다. 상기 옵틱은 미러, 렌즈, 프리즘, 메타표면 등이 될 수 있으나, 이에 한정되지 않는다. 상기 옵틱은 하나일 수 있으나, 복수 개일 수 있다.
또한, 예를 들어, 레이저 출력 소자의 상부에 센서부(300)가 배치되어, 레이저 출력 소자에서 출력된 레이저 빔은 대상체를 거치지 않고 바로 센서부(300)에 감지될 수 있다. 상기 센서부(300)는 레이저 출력 소자와 1mm, 1um, 1nm 등의 거리를 두고 이격될 수 있으나, 이에 한정되지 않는다. 또는, 상기 센서부(300)는 레이저 출력 소자와 이격되지 않고 인접하게 배치될 수도 있다. 상기 센서부(300)와 상기 레이저 출력 소자 사이에는 옵틱이 존재할 수도 있으나, 이에 한정되지 않는다.
구체적으로, 레이저 출력부(100)는 레이저를 출력할 수 있고, 제어부(400)는 레이저 출력부(100)에서 레이저가 출력된 시점을 획득할 수 있으며, 레이저 출력부(100)에서 출력된 레이저가 스캔 영역 내에 위치하는 대상체에서 반사된 경우 센서부(300)는 대상체에서 반사된 레이저를 감지할 수 있고, 제어부(400)는 센서부(300)에서 레이저가 감지된 시점을 획득할 수 있으며, 제어부(400)는 레이저의 출력 시점 및 감지 시점에 기초하여 스캔 영역 내에 위치하는 대상체까지의 거리를 판단할 수 있다.
또한, 구체적으로, 레이저 출력부(100)에서 레이저를 출력할 수 있고, 레이저 출력부(100)에서 출력된 레이저가 스캔 영역 내에 위치하는 대상체를 거지치 않고 바로 센서부(300)에 의해 감지될 수 있고, 제어부(400)는 대상체를 거치지 않은 레이저가 감지된 시점을 획득할 수 있다. 레이저 출력부(100)에서 출력된 레이저가 스캔 영역 내에 위치하는 대상체에서 반사된 경우 센서부(300)는 대상체에서 반사된 레이저를 감지할 수 있고, 제어부(400)는 센서부(300)에서 레이저가 감지된 시점을 획득할 수 있으며, 제어부(400)는 대상체를 거치지 않은 레이저의 감지 시점 및 대상체에서 반사된 레이저의 감지 시점에 기초하여 스캔 영역 내에 위치하는 대상체까지의 거리를 판단할 수 있다.
도 2는 일 실시예에 따른 라이다 장치를 나타낸 도면이다.
도 2를 참조하면, 일 실시예에 따른 라이다 장치(1100)는 레이저 출력부(100), 옵틱부(200) 및 센서부(300)를 포함할 수 있다.
레이저 출력부(100), 옵틱부(200) 및 센서부(300)는 도 1에서 설명되었으므로, 이하에서 상세한 설명은 생략하기로 한다.
이하에서는 VCSEL을 포함하는 레이저 출력부의 다양한 실시예들에 대하여 상세하게 설명한다.
도 3은 일 실시예에 따른 레이저 출력부를 나타낸 도면이다.
도 3을 참조하면, 일 실시예에 따른 레이저 출력부(100)는 VCSEL emitter(110)를 포함할 수 있다.
일 실시예에 따른 VCSEL emitter(110)는 상부 메탈 컨택(10), 상부 DBR 레이어(20, upper Distributed Bragg reflector), active 레이어(40, quantum well), 하부 DBR 레이어(30, lower Distributed Bragg reflector), 기판(50, substrate) 및 하부 메탈 컨택(60)을 포함할 수 있다.
또한, 일 실시예에 따른 VCSEL emitter(110)는 상단 표면에서 수직으로 레이저 빔을 방출할 수 있다. 예를 들어, VCSEL emitter(110)는 상부 메탈 컨택(10)의 표면에서 수직으로 레이저 빔을 방출할 수 있다. 또한, 예를 들어, VCSEL emitter(110)는 acvite 레이어(40)에 수직으로 레이저 빔을 방출할 수 있다.
일 실시예에 따른 VCSEL emitter(110)는 상부 DBR 레이어(20) 및 하부 DBR 레이어(30)를 포함할 수 있다.
일 실시예에 따른 상부 DBR 레이어(20) 및 하부 DBR 레이어(30)는 복수 개의 반사층으로 이루어질 수 있다. 예를 들어, 복수 개의 반사층은 반사율이 높은 반사층과 반사율이 낮은 반사층이 교대로 배치될 수 있다. 이때, 복수 개의 반사층의 두께는 VCSEL emitter(110)에서 방출되는 레이저 파장의 4분의 1일 수 있다.
또한, 일 실시예에 따른 상부 DBR 레이어(20) 및 하부 DBR 레이어(30)는 p형 및 n형으로 도핑될 수 있다. 예를 들어, 상부 DBR 레이어(20)는 p형으로 도핑되고, 하부 DBR 레이어(30)는 n형으로 도핑될 수 있다. 또는, 예를 들어, 상부 DBR 레이어(20)는 n형으로 도핑되고, 하부 DBR 레이어(30)는 p형으로 도핑될 수 있다.
또한, 일 실시예에 따르면 하부 DBR 레이어(30)와 하부 메탈 컨택(60) 사이에는 substrate(50)가 배치될 수 있다. 하부 DBR 레이어(30)가 p형으로 도핑되는 경우 Substrate(50)도 p형 substrate가 될 수 있고, 하부 DBR 레이어(30)가 n형으로 도핑되는 경우 Substrate(50)도 n형 substrate가 될 수 있다.
일 실시예에 따른 VCSEL emitter(110)는 active 레이어(40)를 포함할 수 있다.
일 실시예에 따른 active 레이어(40)는 상부 DBR 레이어(20) 및 하부 DBR 레이어(30) 사이에 배치될 수 있다.
일 실시예에 따른 active 레이어(40)는 레이저 빔을 생성하는 복수 개의 퀀텀 웰(Quantum well)을 포함할 수 있다. Active 레이어(40)는 레이저 빔을 방출시킬 수 있다.
일 실시예에 따른 VCSEL emitter(110)는 전원 등과의 전기적 연결을 위해 메탈 컨택을 포함할 수 있다. 예를 들어 VCSEL emitter(110)는 상부 메탈 컨택(10) 및 하부 메탈 컨택(60)을 포함할 수 있다.
또한 일 실시예에 따른 VCSEL emitter(110)는 메탈 컨택을 통해 상부 DBR 레이어(20) 및 하부 DBR 레이어(30)와 전기적으로 연결될 수 있다.
예를 들어, 상부 DBR 레이어(20)가 p형으로 도핑되고 하부 DBR 레이어(30)가 n형으로 도핑되는 경우, 상부 메탈 컨택(10)에는 p형 전원이 공급되어 상부 DBR 레이어(20)와 전기적으로 연결되고, 하부 메탈 컨택(60)에는 n형 전원이 공급되어 하부 DBR 레이어(30)와 전기적으로 연결될 수 있다.
또한 예를 들어, 예를 들어, 상부 DBR 레이어(20)가 n형으로 도핑되고 하부 DBR 레이어(30)가 p형으로 도핑되는 경우, 상부 메탈 컨택(10)에는 n형 전원이 공급되어 상부 DBR 레이어(20)와 전기적으로 연결되고, 하부 메탈 컨택(60)에는 p형 전원이 공급되어 하부 DBR 레이어(30)와 전기적으로 연결될 수 있다.
일 실시예에 따른 VCSEL emitter(110)는 oxidation area를 포함할 수 있다. Oxidation area는 active layer의 상부에 배치될 수 있다.
일 실시예에 따른 oxidation area는 절연성을 띌 수 있다. 예를 들어, oxidation area에는 전기적 흐름이 제한될 수 있다. 예를 들어, oxidation area에는 전기적 연결이 제한될 수 있다.
또한 일 실시예에 따른 oxidation area는 aperture의 역할을 할 수 있다. 구체적으로, oxidation area는 절연성을 가지므로, oxidation area가 아닌 부분에서만 active layer(40)로부터 생성된 빔이 방출될 수 있다.
일 실시예에 따른 레이저 출력부는 복수 개의 VCSEL emitter(110)를 포함할 수 있다.
또한, 일 실시예에 따른 레이저 출력부는 복수 개의 VCSEL emitter(110)들을 한번에 on시킬 수 있거나, 개별적으로 on시킬 수 있다.
일 실시예에 따른 레이저 출력부는 다양한 파장의 레이저 빔을 출사할 수 있다. 예를 들어, 레이저 출력부는 파장이 905nm인 레이저 빔을 출사할 수 있다. 또한 예를 들어, 레이저 출력부는 1550nm의 파장을 갖는 레이저 빔을 출사할 수 있다.
또한 일 실시예에 따른 레이저 출력부는 출력되는 파장이 주변 환경에 의해 변화될 수 있다. 예를 들어, 레이저 출력부는 주변 환경의 온도가 증가할수록, 출력되는 파장도 증가할 수 있다. 또는 예를 들어, 레이저 출력부는 주변 환경의 온도가 감소할수록, 출력되는 파장도 감소할 수 있다. 상기 주변 환경이란, 온도, 습도, 압력, 먼지의 농도, 주변 광량, 고도, 중력, 가속도 등을 포함할 수 있으나, 이에 한정되지 않는다.
레이저 출력부는 지지면과 수직한 방향으로 레이저 빔을 출사할 수 있다. 또는, 레이저 출력부는 상기 출사면과 수직한 방향으로 레이저 빔을 출사할 수 있다.
도 4는 일 실시예에 따른 VCSEL unit을 나타낸 도면이다.
도 4를 참조하면, 일 실시예에 따른 레이저 출력부(100)는 VCSEL unit(130)을 포함할 수 있다.
일 실시예에 따른 VCSEL unit(130)은 복수 개의 VCSEL emitter(110)를 포함할 수 있다. 예를 들어, 복수 개의 VCSEL emitter(110)들은 허니콤(honeycomb)구조로 배치될 수 있으나, 이에 한정되지 않는다. 이때, 1개의 허니콤 구조에는 VCSEL emitter(110) 7개가 포함될 수 있으나, 이에 한정되지 않는다.
또한 일 실시예에 따른 VCSEL unit(130)에 포함된 VCSEL emitter(110)들은 모두 동일한 방향으로 조사될 수 있다. 예를 들어, VCSEL unit(130)에 포함된 400개의 VCSEL emitter(110)들은 모두 동일한 방향으로 조사될 수 있다.
또한, VCSEL unit(130)은 출력된 레이저 빔의 조사 방향에 의해 구별될 수 있다. 예를 들어, N개의 VCSEL emitter(110)들이 모두 제1 방향으로 레이저 빔을 출력하고, M개의 VCSEL emitter(110)들이 모두 제2 방향으로 레이저 빔을 출력하는 경우, 상기 N개의 VCSEL emitter(110)들은 제1 VCSEL unit으로 구별되고, 상기 M개의 VCSEL emitter(110)들은 제2 VCSEL unit으로 구별될 수 있다.
또한, 일 실시예에 따른 VCSEL unit(130)은 메탈 컨택을 포함할 수 있다. 예를 들어, VCSEL unit(130)은 p형 메탈 및 n형 메탈을 포함할 수 있다. 또한, 예를 들어, VCSEL unit(130)에 포함된 복수 개의 VCSEL emitter(110)는 메탈 컨택을 공유할 수 있다.
도 5는 일 실시예에 따른 VCSEL array를 나타낸 도면이다.
도 5를 참조하면, 일 실시예에 따른 레이저 출력부(100)는 VCSEL array(150)를 포함할 수 있다. 도 5는 8X8 VCSEL array를 도시하고 있으나, 이에 한정되지 않는다.
일 실시예에 따른 VCSEL array(150)는 복수 개의 VCSEL unit(130)을 포함할 수 있다. 예를 들어, 복수 개의 VCSEL unit(130)은 매트릭스 구조로 배치될 수 있으나, 이에 한정되지 않는다.
예를 들어, 상기 복수 개의 VCSEL unit(130)은 N X N 매트릭스일 수 있으나, 이에 한정되지 않는다. 또한 예를 들어, 상기 복수 개의 VCSEL unit(130)은 N X M 매트릭스일 수 있으나, 이에 한정되지 않는다.
또한, 일 실시예에 따른 VCSEL array(150)는 메탈 컨택을 포함할 수 있다. 예를 들어, VCSEL array(150)는 p형 메탈 및 n형 메탈을 포함할 수 있다. 이때, 복수 개의 VCSEL unit(130)은 메탈 컨택을 공유할 수도 있으나, 메탈 컨택을 공유하지 않고 각각 독립된 메탈 컨택을 가질 수도 있다.
도 6은 일 실시예에 따른 VCSEL array 및 메탈 컨택을 나타낸 측면도이다.
도 6을 참조하면, 일 실시예에 따른 레이저 출력부(100)는 VCSEL array(151)를 포함할 수 있다. 도 7은 4X4 VCSEL array를 도시하고 있으나, 이에 한정되지 않는다. VCSEL array(151)는 제1 메탈 컨택(11), 와이어(12), 제2 메탈 컨택(13) 및 VCSEL unit(130)을 포함할 수 있다.
일 실시예에 따른 VCSEL array(151)는 매트릭스 구조로 배치된 복수 개의 VCSEL unit(130)을 포함할 수 있다. 이때, 복수 개의 VCSEL unit(130)은 각각 메탈 컨택에 독립적으로 연결될 수 있다. 예를 들어, 복수 개의 VCSEL unit(130)은 제1 메탈 컨택(11)을 공유하여 제1 메탈 컨택에는 함께 연결되고, 제2 메탈 컨택(13)은 공유하지 않아 제2 메탈 컨택에는 독립적으로 연결될 수 있다. 또한, 예를 들어, 복수 개의 VCSEL unit(130)은 제1 메탈 컨택(11)에는 직접적으로 연결되고, 제2 메탈 컨택에는 와이어(12)를 통해 연결될 수 있다. 이때, 필요한 와이어(12)의 개수는 복수 개의 VCSEL unit(130)의 개수와 같을 수 있다. 예를 들어, VCSEL array(151)가 N X M 매트릭스 구조로 배치된 복수 개의 VCSEL unit(130)을 포함할 경우, 와이어(12)의 개수는 N * M 개가 될 수 있다.
또한, 일 실시예에 따른 제1 메탈 컨택(11)과 제2 메탈 컨택(13)은 서로 다를 수 있다. 예를 들어, 제1 메탈 컨택(11)은 n형 메탈이고, 제2 메탈 컨택(13)은 p형 메탈일 수 있다. 반대로, 제1 메탈 컨택(11)은 p형 메탈이고, 제2 메탈 컨택(13)은 n형 메탈일 수 있다.
도 7은 일 실시예에 따른 VCSEL array를 나타낸 도면이다.
도 7을 참조하면, 일 실시예에 따른 레이저 출력부(100)는 VCSEL array(153)를 포함할 수 있다. 도 7은 4X4 VCSEL array를 도시하고 있으나, 이에 한정되지 않는다.
일 실시예에 따른 VCSEL array(153)는 매트릭스 구조로 배치된 복수 개의 VCSEL unit(130)을 포함할 수 있다. 이때, 복수 개의 VCSEL unit(130)은 메탈 컨택을 공유할 수도 있으나, 메탈 컨택을 공유하지 않고 독립된 메탈 컨택을 가질 수도 있다. 예를 들어, 복수 개의 VCSEL unit(130)은 행(row) 단위로 제1 메탈 컨택(15)을 공유할 수 있다. 또한, 예를 들어, 복수 개의 VCSEL unit(130)은 열(column) 단위로 제2 메탈 컨택(17)을 공유할 수 있다.
또한, 일 실시예에 따른 제1 메탈 컨택(15)과 제2 메탈 컨택(17)은 서로 다를 수 있다. 예를 들어, 제1 메탈 컨택(15)은 n형 메탈이고, 제2 메탈 컨택(17)은 p형 메탈일 수 있다. 반대로, 제1 메탈 컨택(15)은 p형 메탈이고, 제2 메탈 컨택(17)은 n형 메탈일 수 있다.
또한, 일 실시예에 따른 VCSEL unit(130)은 제1 메탈 컨택(15) 및 제2 메탈 컨택(17)과 와이어(12)를 통해 전기적으로 연결될 수 있다.
레이저 출력부에서 방출되는 레이저 빔을 대상체로 향하게 하는 방법은 여러가지가 있을 수 있다. 그 중 플래시 방식은 레이저 빔의 발산에 의해 레이저 빔이 대상체로 퍼져나가는 것을 이용한 방식이다. 플래시 방식에서 원거리에 존재하는 대상체에 레이저 빔을 향하게 하기 위해서는 높은 파워의 레이저 빔이 필요하다. 높은 파워의 레이저 빔은 높은 전압을 인가해야 하므로 전력이 커진다. 또한, 사람의 눈에도 데미지를 줄 수 있어 플래시 방식을 사용하는 라이다가 측정할 수 있는 거리에는 한계가 있다.
스캐닝 방식은 레이저 출력부에서 방출되는 레이저 빔을 특정 방향으로 향하게 하는 방식이다. 스캐닝 방식 레이저 빔을 특정 방향으로 향하게 함으로써 레이저 파워 손실을 줄일 수 있다. 레이저 파워 손실을 줄일 수 있으므로, 플래시 방식과 비교했을 때 동일한 레이저 파워를 사용하더라도 라이다가 측정할 수 있는 거리는 스캐닝 방식이 더 길다. 또한, 플래시 방식과 비교했을 때 동일 거리 측정을 위한 레이저 파워는 스캐닝 방식이 더 낮으므로, 사람의 눈에 대한 안정성이 향상될 수 있다.
레이저 빔 스캐닝은 콜리메이션과 스티어링으로 이루어질 수 있다. 예를 들어, 레이저 빔 스캐닝은 레이저 빔을 콜리메이션 한 후 스티어링을 하는 방식으로 이루어질 수 있다. 또한, 예를 들어, 레이저 빔 스캐닝은 스티어링을 한 후 콜리메이션을 하는 방식으로 이루어질 수 있다.
이하에서는 BCSC(Beam Collimation and Steering component)를 포함하는 옵틱부의 다양한 실시예들에 대하여 상세하게 설명한다.
도 8은 일 실시예에 따른 라이다 장치를 설명하기 위한 도면이다.
도 8을 참조하면, 일 실시예에 따른 라이다 장치(1200)는 레이저 출력부(100), 옵틱부를 포함할 수 있다. 이때, 옵틱부는 BCSC(250)을 포함할 수 있다. 또한, BCSC(250)는 콜리메이션 컴포넌트(210, Collimation component) 및 스티어링 컴포넌트(230, Steering component)를 포함할 수 있다.
일 실시예에 따른 BCSC(250)는 다음과 같이 구성될 수 있다. 콜리메이션 컴포넌트(210)가 먼저 레이저 빔을 콜리메이션 시키고, 콜리메이션 된 레이저 빔은 스티어링 컴포넌트(230)를 거쳐 스티어링될 수 있다. 또는, 스티어링 컴포넌트(230)가 먼저 레이저 빔을 스티어링 시키고, 스티어링 된 레이저 빔은 콜리메이션 컴포넌트(210)를 거쳐 콜리메이션될 수 있다.
또한, 일 실시예에 따른 라이다 장치(1200)의 광 경로는 다음과 같다. 레이저 출력부(100)에서 방출된 레이저 빔은 BCSC(250)로 향할 수 있다. BCSC(250)로 입사된 레이저 빔은 콜리메이션 컴포넌트(210)에 의해서 콜리메이션되어 스티어링 컴포넌트(230)로 향할 수 있다. 스티어링 컴포넌트(230)로 입사된 레이저 빔은 스티어링되어 대상체로 향할 수 있다. 대상체(500)로 입사된 레이저 빔은 대상체(500)에 의해 반사되어 센서부로 향할 수 있다.
레이저 출력부에서 방출되는 레이저 빔은 직진성(Directivity)을 갖는다고 하더라도, 레이저 빔이 직진함에 따라 어느 정도의 발산(divergence)이 있을 수 있다. 이러한 발산에 의해, 레이저 출력부에서 방출되는 레이저 빔이 대상체에 입사되지 않거나, 입사되더라도 그 양이 매우 적을 수 있다.
레이저 빔의 발산 정도가 큰 경우, 대상체에 입사되는 레이저 빔의 양이 적어지고, 대상체에서 반사되어 센서부로 향하는 레이저 빔도 그 발산에 의해 양이 매우 적어져, 원하는 측정 결과를 얻지 못할 수 있다. 또는, 레이저 빔의 발산 정도가 큰 경우, 라이다 장치가 측정할 수 있는 거리가 줄어들어, 원거리의 대상체는 측정을 못할 수 있다.
따라서, 대상체로 레이저 빔을 입사시키기 전에, 레이저 출력부에서 방출되는 레이저 빔의 발산 정도를 줄일수록 라이다 장치의 효율이 향상될 수 있다. 본원 발명의 콜리메이션 컴포넌트는 레이저 빔의 발산 정도를 줄일 수 있다. 콜리메이션 컴포넌트를 거친 레이저 빔은 평행광이 될 수 있다. 또는 콜리메이션 컴포넌트를 거친 레이저 빔은 발산 정도가 0.4도 내지 1도일 수 있다.
레이저 빔의 발산 정도를 줄일 경우, 대상체로 입사되는 광량은 증가될 수 있다. 대상체로 입사되는 광량이 증가될 경우, 대상체에서 반사되는 광량도 증가되어 레이저 빔의 수신이 효율적으로 이루어질 수 있다. 또한, 대상체로 입사되는 광량이 증가될 경우, 레이저 빔을 콜리메이션 하기 전과 비교했을 때, 같은 레이저 빔 파워로 더 먼 거리에 있는 대상체도 측정이 가능할 수 있다.
도 9는 일 실시예에 따른 콜리메이션 컴포넌트를 설명하기 위한 도면이다.
도 9를 참조하면, 일 실시예에 따른 콜리메이션 컴포넌트(210)는 레이저 출력부(100)에서 방출된 레이저 빔이 향하는 방향에 배치될 수 있다. 콜리메이션 컴포넌트(210)는 레이저 빔의 발산 정도를 조절할 수 있다. 콜리메이션 컴포넌트(210)는 레이저 빔의 발산 정도를 줄일 수 있다.
예를 들어, 레이저 출력부(100)에서 방출되는 레이저 빔의 발산 각도는 16도 내지 30도일 수 있다. 이때, 레이저 출력부(100)에서 방출된 레이저 빔이 콜리메이션 컴포넌트(210)를 거친 후에는, 레이저 빔의 발산 각도가 0.4도 내지 1도일 수 있다.
도 10은 일 실시예에 따른 콜리메이션 컴포넌트를 설명하기 위한 도면이다.
도 10을 참조하면, 일 실시예에 따른 콜리메이션 컴포넌트(210)는 복수 개의 마이크로 렌즈(211) 및 기판(213)을 포함할 수 있다.
상기 마이크로 렌즈는 지름이 밀리미터(mm), 마이크로미터(um), 나노미터(nm), 피코미터(pm) 등이 될 수 있으나, 이에 한정되지 않는다.
일 실시예에 따른 복수 개의 마이크로 렌즈(211)는 기판(213) 상에 배치될 수 있다. 복수 개의 마이크로 렌즈(211) 및 기판(213)은 복수 개의 VCSEL emitter(110)의 상부에 배치될 수 있다. 이때, 복수 개의 마이크로 렌즈(211) 중 하나는 복수 개의 VCSEL emitter(110) 중 하나에 대응되도록 배치될 수 있으나, 이에 한정되지 않는다.
또한, 일 실시예에 따른 복수 개의 마이크로 렌즈(211)는 복수 개의 VCSEL emitter(110)에서 방출된 레이저 빔을 콜리메이션 시킬 수 있다. 이때, 복수 개의 VCSEL emitter(110) 중 하나에서 방출된 레이저 빔은 복수 개의 마이크로 렌즈(211) 중 하나에 의해 콜리메이션 될 수 있다. 예를 들어, 복수 개의 VCSEL emitter(110) 중 하나에서 방출된 레이저 빔의 발산 각도는 복수 개의 마이크로 렌즈(211) 중 하나를 거친 후 감소될 수 있다.
또한, 일 실시예에 따른 복수 개의 마이크로 렌즈는 굴절률 분포형 렌즈, 미소곡면 렌즈, 어레이 렌즈 및 프레넬 렌즈 등이 될 수 있다.
또한, 일 실시예에 따른 복수 개의 마이크로 렌즈는 몰딩, 이온 교환, 확산 중합, 스퍼터링 및 에칭 등의 방법으로 제작될 수 있다.
또한, 일 실시예에 따른 복수 개의 마이크로 렌즈는 그 직경이 130um 내지 150um 일 수 있다. 예를 들어, 복수 개의 마이크로 렌즈의 직경은 140um일 수 있다. 또한, 복수 개의 마이크로 렌즈는 그 두께가 400um 내지 600um 일 수 있다. 예를 들어, 복수 개의 마이크로 렌즈의 두께는 500um 일 수 있다.
도 11은 일 실시예에 따른 콜리메이션 컴포넌트를 설명하기 위한 도면이다.
도 11을 참조하면, 일 실시예에 따른 콜리메이션 컴포넌트(210)는 복수 개의 마이크로 렌즈(211) 및 기판(213)을 포함할 수 있다.
일 실시예에 따른 복수 개의 마이크로 렌즈(211)는 기판(213) 상에 배치될 수 있다. 예를 들어, 복수 개의 마이크로 렌즈(211)는 기판(213)의 표면 및 배면 상에 배치될 수 있다. 이때, 기판(213)의 표면에 배치된 마이크로 렌즈(211)와 기판(213)의 배면에 배치된 마이크로 렌즈(211)의 광축(optical axis)은 일치될 수 있다.
도 12는 일 실시예에 따른 콜리메이션 컴포넌트를 설명하기 위한 도면이다.
도 12를 참조하면, 일 실시예에 따른 콜리메이션 컴포넌트는 메타표면(220, metasurface)을 포함할 수 있다.
일 실시예에 따른 메타표면(220)은 복수의 나노기둥(221)을 포함할 수 있다. 예를 들어, 복수의 나노기둥(221)은 메타표면(220)의 일측면에 배치될 수 있다. 또한, 예를 들어, 복수의 나노기둥(221)은 메타표면(220)의 양면에 배치될 수 있다.
복수의 나노기둥(221)은 서브-파장(sub-wavelength)치수를 가질 수 있다. 예를 들어, 상기 복수의 나노기둥(221)사이의 간격은 레이저 출력부(100)로부터 출사되는 레이저 빔의 파장보다 작을 수 있다. 또는, 나노기둥(221)의 폭, 직경 및 높이는 레이저 빔의 파장의 길이보다 작을 수 있다.
메타표면(220)은 레이저 출력부(100)로부터 출사되는 레이저 빔의 위상을 조절함으로써 상기 레이저 빔을 굴절시킬 수 있다. 메타표면(220)은 레이저 출력부(100)로부터 다양한 방향으로 출력되는 레이저 빔을 굴절시킬 수 있다.
메타표면(220)은 레이저 출력부(100)로부터 출사되는 레이저 빔을 콜리메이션 시킬 수 있다. 또한, 메타표면(220)은 레이저 출력부(100)로부터 출사되는 레이저 빔의 발산각도를 줄일 수 있다. 예를 들어, 레이저 출력부(100)로부터 출사되는 레이저 빔의 발산각도는 15도 내지 30도이고, 메타표면(220)을 거친 후의 레이저 빔의 발산각도는 0.4도 내지 1.8도일 수 있다.
메타표면(220)은 레이저 출력부(100)상에 배치될 수 있다. 예를 들어, 메타표면(220)은 레이저 출력부(100)의 상기 출사면측에 배치될 수 있다.
또는, 메타표면(220)은 레이저 출력부(100)상에 증착될 수 있다. 복수의 나노기둥(221)은 레이저 출력부(100)의 상부에 형성될 수 있다. 상기 복수의 나노기둥(221)은 레이저 출력부(100)상에서 다양한 나노패턴을 형성할 수 있다.
나노기둥(221)은 다양한 형상을 가질 수 있다. 예를 들어, 나노기둥(221)은 원기둥, 다각기둥, 원뿔, 다각뿔 등의 형상을 가질 수 있다. 뿐만 아니라, 나노기둥(221)은 불규칙적인 형상을 가질 수 있다.
도 13은 일 실시예에 따른 스티어링 컴포넌트를 설명하기 위한 도면이다.
도 13을 참조하면, 일 실시예에 따른 스티어링 컴포넌트(230)는 레이저 출력부(100)에서 방출된 레이저 빔이 향하는 방향에 배치될 수 있다. 스티어링 컴포넌트(230)는 레이저 빔이 향하는 방향을 조절할 수 있다. 스티어링 컴포넌트(230)는 레이저 광원의 광축과 레이저 빔이 이루는 각도를 조절할 수 있다.
예를 들어, 스티어링 컴포넌트(230)는 레이저 광원의 광축과 레이저 빔이 이루는 각도가 0도 내지 30도가 되도록 레이저 빔을 스티어링 할 수 있다. 또는, 예를 들어, 스티어링 컴포넌트(230)는 레이저 광원의 광축과 레이저 빔이 이루는 각도가 -30도 내지 0도가 되도록 레이저 빔을 스티어링 할 수 있다.
도 14 및 도 15는 일 실시예에 따른 스티어링 컴포넌트를 설명하기 위한 도면이다.
도 14 및 도 15를 참조하면, 일 실시예에 따른 스티어링 컴포넌트(231)는 복수 개의 마이크로 렌즈(231) 및 기판(233)을 포함할 수 있다.
일 실시예에 따른 복수 개의 마이크로 렌즈(232)는 기판(233) 상에 배치될 수 있다. 복수 개의 마이크로 렌즈(232) 및 기판(233)은 복수 개의 VCSEL emitter(110)의 상부에 배치될 수 있다. 이때, 복수 개의 마이크로 렌즈(232) 중 하나는 복수 개의 VCSEL emitter(110) 중 하나에 대응되도록 배치될 수 있으나, 이에 한정되지 않는다.
또한, 일 실시예에 따른 복수 개의 마이크로 렌즈(232)는 복수 개의 VCSEL emitter(110)에서 방출된 레이저 빔을 스티어링 시킬 수 있다. 이때, 복수 개의 VCSEL emitter(110) 중 하나에서 방출된 레이저 빔은 복수 개의 마이크로 렌즈(232) 중 하나에 의해 스티어링 될 수 있다.
이때, 마이크로 렌즈(232)의 광축과 VCSEL emitter(110)의 광축은 일치하지 않을 수 있다. 예를 들어, 도 14를 참조하면, VCSEL emitter(110)의 광축이 마이크로 렌즈(232)의 광축보다 오른쪽에 있는 경우, VCSEL emitter(110)에서 방출되어 마이크로 렌즈(232)를 거친 레이저 빔은 왼쪽으로 향할 수 있다. 또한, 예를 들어, 도 15를 참조하면, VCSEL emitter(110)의 광축이 마이크로 렌즈(232)의 광축보다 왼쪽에 있는 경우, VCSEL emitter(110)에서 방출되어 마이크로 렌즈(232)를 거친 레이저 빔은 오른쪽으로 향할 수 있다.
또한, 마이크로 렌즈(232)의 광축과 VCSEL emitter(110)의 광축 사이의 거리가 멀어질수록, 레이저 빔의 스티어링 정도가 커질 수 있다. 예를 들어, 마이크로 렌즈(232)의 광축과 VCSEL emitter(110)의 광축 사이의 거리가 1um인 경우보다 10um인 경우에 레이저 광원의 광축과 레이저 빔이 이루는 각도가 더 커질 수 있다.
도 16은 일 실시예에 따른 스티어링 컴포넌트를 설명하기 위한 도면이다.
도 16을 참조하면, 일 실시예에 따른 스티어링 컴포넌트(234)는 복수 개의 마이크로 프리즘(235) 및 기판(236)을 포함할 수 있다.
일 실시예에 따른 복수 개의 마이크로 프리즘(235)은 기판(236) 상에 배치될 수 있다. 복수 개의 마이크로 프리즘(235) 및 기판(236)은 복수 개의 VCSEL emitter(110)의 상부에 배치될 수 있다. 이때, 복수 개의 마이크로 프리즘(235)은복수 개의 VCSEL emitter(110) 중 하나에 대응되도록 배치될 수 있으나, 이에 한정되지 않는다.
또한, 일 실시예에 따른 복수 개의 마이크로 프리즘(235)은 복수 개의 VCSEL emitter(110)에서 방출된 레이저 빔을 스티어링 시킬 수 있다. 예를 들어, 복수 개의 마이크로 프리즘(235)은 레이저 광원의 광축과 레이저 빔이 이루는 각도를 변화시킬 수 있다.
이때, 마이크로 프리즘(235)의 각도가 작을수록, 레이저 광원의 광축과 레이저 빔이 이루는 각도가 증가한다. 예를 들어, 마이크로 프리즘(235)의 각도가 0.05도인 경우 레이저 빔이 35도 스티어링 되고, 마이크로 프리즘(235)의 각도가 0.25도인 경우, 레이저 빔이 15도 스티어링 된다.
또한, 일 실시예에 따른 복수 개의 마이크로 프리즘(235)은 Porro prism, Amici roof prism, Pentaprism, Dove prism, Retroreflector prism 등이 될 수 있다. 또한, 복수 개의 마이크로 프리즘(235)은 유리, 플라스틱 또는 형석 등으로 이루어질 수 있다. 또한, 복수 개의 마이크로 프리즘(235)은 몰딩, 에칭 등의 방법으로 제작될 수 있다.
도 17은 일 실시예에 따른 스티어링 컴포넌트를 설명하기 위한 도면이다.
도 17을 참조하면, 일 실시예에 따른 스티어링 컴포넌트는 메타표면(240)을 포함할 수 있다.
메타표면(240)은 복수의 나노기둥(241)을 포함할 수 있다. 예를 들어, 복수의 나노기둥(241)은 메타표면(240)의 일측면에 배치될 수 있다. 또한, 예를 들어, 복수의 나노기둥(241)은 메타표면(240)의 양면에 배치될 수 있다.
메타표면(240)은 레이저 출력부(100)로부터 출사되는 레이저 빔의 위상을 조절함으로써 상기 레이저 빔을 굴절시킬 수 있다.
메타표면(240)은 레이저 출력부(100)상에 배치될 수 있다. 예를 들어, 메타표면(240)은 레이저 출력부(100)의 상기 출사면측에 배치될 수 있다.
또는, 메타표면(240)은 레이저 출력부(100)상에 증착될 수 있다. 복수의 나노기둥(241)은 레이저 출력부(100)의 상부에 형성될 수 있다. 상기 복수의 나노기둥(241)은 레이저 출력부(100)상에서 다양한 나노패턴을 형성할 수 있다.
나노기둥(241)은 다양한 형상을 가질 수 있다. 예를 들어, 나노기둥(241)은 원기둥, 다각기둥, 원뿔, 다각뿔 등의 형상을 가질 수 있다. 뿐만 아니라, 나노기둥(241)은 불규칙적인 형상을 가질 수 있다.
복수의 나노기둥(241)은 다양한 나노패턴을 형성할 수 있다. 메타표면(240)은 상기 나노패턴에 기초하여 레이저 출력부(100)로부터 출사되는 레이저 빔을 스티어링할 수 있다.
나노기둥(241)은 다양한 특성에 기초하여 나노패턴을 형성할 수 있다. 상기 특성은 나노기둥(241)의 폭(Width, 이하 W), 간격(Pitch, 이하 P), 높이(Height, 이하 H) 및 단위 길이 당 개수를 포함할 수 있다.
이하에서는, 다양한 특성에 기초하여 형성되는 나노패턴 및 그에 따른 레이저 빔의 스티어링에 대하여 설명한다.
도 18은 일 실시예에 따른 메타표면을 설명하기 위한 도면이다.
도 18을 참조하면, 일 실시예에 따른 메타표면(240)은 폭(W)이 상이한 복수 개의 나노기둥(241)을 포함할 수 있다.
복수의 나노기둥(241)은 그 폭(W)에 기초하여 나노패턴을 형성할 수 있다. 예를 들면, 복수의 나노기둥(241)은 일 방향으로 갈수록 그 폭(W1, W2, W3)이 증가하도록 배치될 수 있다. 이때, 레이저 출력부(100)로부터 출사되는 레이저 빔은 나노기둥(241)의 폭(W)이 증가하는 방향으로 스티어링될 수 있다.
예를 들어, 메타표면(240)은 제1 폭(W1)을 갖는 제1 나노기둥(243), 제2 폭(W2)을 갖는 제2 나노기둥(245), 제3 폭(W3)을 갖는 제3 나노기둥(247)을 포함할 수 있다. 제1 폭(W1)은 제2 폭(W2) 및 제3 폭(W3)보다 클 수 있다. 제2 폭(W2)은 제3 폭(W3)보다 클 수 있다. 즉, 제1 나노기둥(243)으로부터 제3 나노기둥(247) 측으로 갈수록 나노기둥(241)의 폭(W)이 감소할 수 있다. 이때, 레이저 출력부(100)로부터 출사된 레이저 빔이 메타표면(240)을 거칠 경우, 레이저 출력부(100)로부터 출사되는 제1 방향과 제3 나노기둥(247)으로부터 제1 나노기둥(243)으로의 방향인 제2 방향의 사이 방향으로 스티어링될 수 있다.
한편, 상기 레이저 빔의 스티어링 각도(θ)는 나노기둥(241)의 폭(W)의 증감률에 따라 달라질 수 있다. 여기서 나노기둥(241)의 폭(W)의 증감률이란 인접한 복수의 나노기둥(241)의 폭(W)의 증감 정도를 평균적으로 나타낸 수치를 의미할 수 있다.
제1 폭(W1)과 제2 폭(W2)의 차이 및 제2 폭(W2)과 제3 폭(W3)의 차이에 기초하여 나노기둥(241)의 폭(W)의 증감률이 산출될 수 있다.
제1 폭(W1)과 제2 폭(W2)의 차이는 제2 폭(W2)과 제3 폭(W3)의 차이와 다를 수 있다.
레이저 빔의 스티어링 각도(θ)는 나노기둥(241)의 폭(W)에 따라 달리질 수 있다.
구체적으로, 상기 스티어링 각도(θ)는 나노기둥(241)의 폭(W)의 증감률이 증가할수록 커질 수 있다.
예를 들어, 나노기둥(241)은 그 폭(W)에 기초하여 제1 증감률을 가지는 제1 패턴을 형성할 수 있다. 또한, 나노기둥(241)은 그 폭(W)에 기초하여 상기 제1 증감률보다 작은 제2 증감률을 가지는 제2 패턴을 형성할 수 있다.
이때, 상기 제1 패턴에 의한 제1 스티어링 각도는, 상기 제2 패턴에 의한 제2 스티어링 각도보다 클 수 있다.
한편, 상기 스티어링 각도(θ)의 범위는 -90도에서 90도일 수 있다.
도 19는 일 실시예에 따른 메타표면을 설명하기 위한 도면이다.
도 19를 참조하면, 일 실시예에 따른 메타표면(240)은 인접한 나노기둥(241) 사이의 간격(P)이 상이한 복수 개의 나노기둥(241)을 포함할 수 있다.
복수의 나노기둥(241)은 인접한 나노기둥(241) 사이의 간격(P)의 변화에 기초하여 나노패턴을 형성할 수 있다. 메타표면(240)은 나노기둥(241) 사이의 간격(P)의 변화에 기초하여 형성되는 나노패턴에 기초하여 레이저 출력부(100)로부터 출사되는 레이저 빔을 스티어링할 수 있다.
일 실시예에 따르면, 나노기둥(241) 사이의 간격(P)은 일 방향으로 갈수록 작아질 수 있다. 여기서, 상기 간격(P)이란 인접한 두 나노기둥(241)의 중심간의 거리를 의미할 수 있다. 예컨대, 제1 간격(P1)은 제1 나노기둥(243)의 중심과 제2 나노기둥(245)의 중심간의 거리로 정의될 수 있다. 또는, 제1 간격(P1)은 제1 나노기둥(243)과 제2 나노기둥(245)의 최단거리로 정의될 수 있다.
레이저 출력부(100)로부터 출사되는 레이저 빔은 상기 나노기둥(241) 사이의 간격(P)이 작아지는 방향으로 스티어링될 수 있다.
메타표면(240)은 제1 나노기둥(243), 제2 나노기둥(245) 및 제3 나노기둥(247)을 포함할 수 있다. 이때, 제1 나노기둥(243) 및 제2 나노기둥(245) 사이의 거리에 기초하여 제1 간격(P1)이 획득될 수 있다. 마찬가지로, 제2 나노기둥(245) 및 제3 나노기둥(247) 사이의 거리에 기초하여 제2 간격(P2)이 획득될 수 있다. 이때, 제1 간격(P1)은 제2 간격(P2)보다 작을 수 있다. 즉, 제1 나노기둥(243)으로부터 제3 나노기둥(247) 측으로 갈수록 상기 간격(P)이 커질 수 있다.
이때, 레이저 출력부(100)로부터 출사되는 레이저 빔이 메타표면(240)을 거지는 경우, 상기 레이저 빔은 레이저 출력부(100)로부터 출사되는 제1 방향과 제3 나노기둥(247)으로부터 제1 나노기둥(243)으로의 방향인 제1 방향의 사이 방향으로 스티어링될 수 있다.
상기 레이저 빔의 스티어링 각도(θ)는 나노기둥(241) 사이의 간격(P)에 따라 달라질 수 있다.
구체적으로, 상기 레이저 빔의 스티어링 각도(θ)는 나노기둥(241) 사이의 간격(P)의 증감률에 따라 달라질 수 있다. 여기서, 나노기둥(241) 사이의 간격(P)의 증감률이란 인접한 나노기둥(241) 사이의 간격(P)의 변화 정도를 평균적으로 나타낸 수치를 의미할 수 있다.
상기 레이저 빔의 스티어링 각도(θ)는 나노기둥(241) 사이의 간격(P)의 증감률이 증가할수록 커질 수 있다.
예를 들어, 나노기둥(241)은 그 간격(P)에 기초하여 제1 증감률을 가지는 제1 패턴을 형성할 수 있다. 또한, 나노기둥(241)은 그 간격(P)에 기초하여 제2 증감률을 가지는 제2 패턴을 형성할 수 있다.
이때, 상기 제1 패턴에 의한 제1 스티어링각도는, 상기 제2 패턴에 의한 제2 스티어링각도보다 클 수 있다.
한편, 이상에서 설명한 나노기둥(241)의 간격(P)의 변화에 따른 레이저 빔의 스티어링 원리는 단위 길이 당 나노기둥(241)의 개수가 변하는 경우에도 유사하게 적용될 수 있다.
예를 들어, 단위 길이 당 나노기둥(241)의 개수가 변하는 경우, 레이저 출력부(100)로부터 출사되는 레이저 빔은, 레이저 출력부(100)로부터 출사되는 제1 방향과 단위 길이 당 나노기둥(241)의 개수가 증가하는 제2 방향의 사이 방향으로 스티어링될 수 있다.
도 20은 일 실시예에 따른 메타표면을 설명하기 위한 도면이다.
도 20을 참조하면, 일 실시예에 따른 메타표면(240)은 나노기둥(241)의 높이(H)가 상이한 복수 개의 나노기둥(241)을 포함할 수 있다.
복수의 나노기둥(241)은 나노기둥(241)의 높이(H)의 변화에 기초하여 나노패턴을 형성할 수 있다.
일 실시예에 따르면, 복수의 나노기둥(241)의 높이(H1, H2, H3)는 일 방향으로 갈수록 증가할 수 있다. 레이저 출력부(100)로부터 출사되는 레이저 빔은 상기 나노기둥(241)의 높이(H)가 증가하는 방향으로 스티어링될 수 있다.
예를 들어, 메타표면(240)은 제1 높이(H1)를 갖는 제1 나노기둥(243), 제2 높이(H2)를 갖는 제2 나노기둥(245) 및 제3 높이(H3)를 갖는 제3 나노기둥(247)을 포함할 수 있다. 제3 높이(H3)은 제1 높이(H1) 및 제2 높이(H2)보다 클 수 있다. 제2 높이(H2)는 제1 높이(H1)보다 클 수 있다. 즉, 제1 나노기둥(243)으로부터 제3 나노기둥(247) 측으로 갈수록 나노기둥(241)의 높이(H)가 증가할 수 있다. 이때, 레이저 출력부(100)로부터 출사되는 레이저 빔이 메타표면(240)을 거치는 경우, 상기 레이저 빔은 레이저 출력부(100)로부터 출사되는 제1 방향과 제1 나노기둥(243)으로부터 제3 나노기둥(247)으로의 방향인 제2 방향의 사이 방향으로 스티어링될 수 있다.
상기 레이저 빔의 스티어링 각도(θ)는 나노기둥(241)의 높이(H)에 따라 달라질 수 있다.
구체적으로, 상기 레이저 빔의 스티어링 각도(θ)는 나노기둥(241)의 높이(H)의 증감률에 따라 달라질 수 있다. 여기서, 나노기둥(241)의 높이(H)의 증감률이란 인접한 나노기둥(241)의 높이(H) 변화 정도를 평균적으로 나타낸 수치를 의미할 수 있다.
제1 높이(H1)와 제2 높이(H2)의 차이 및 제2 높이(H2)와 제3 높이(H3)의 차이에 기초하여 나노기둥(241)의 높이(H)의 증감률이 산출될 수 있다. 제1 높이(H1)와 제2 높이(H2)의 차이는 제2 높이(H3)와 제3 높이(H3)의 차이와 다를 수 있다.
상기 레이저 빔의 스티어링 각도(θ)는 나노기둥(241)의 높이(H)의 증감률이 증가할수록 커질 수 있다.
예를 들어, 나노기둥(241)은 그 높이(H)에 기초하여 제1 증감률을 가지는 제1 패턴을 형성할 수 있다. 또한, 나노기둥(241)은 그 높이(H)에 기초하여 제2 증감률을 가지는 제2 패턴을 형성할 수 있다.
이때, 상기 제1 패턴에 의한 제1 스티어링각도는, 상기 제2 패턴에 의한 제2 스티어링각도보다 클 수 있다.
일 실시예에 따른 라이다 장치는 레이저 출력부에서 방출되는 레이저 빔을 대상체로 향하게 하는 옵틱부를 포함할 수 있다.
상기 옵틱부는 레이저 출력부에서 방출되는 레이저 빔을 콜리메이션 시키고 스티어링 시키는 BCSC(Beam Collimation and Steering Component)를 포함할 수 있다. 상기 BCSC는 하나의 컴포넌트로 구성될 수도 있고, 복수개의 컴포넌트로 구성될 수도 있다.
도 21은 일 실시예에 따른 옵틱부를 설명하기 위한 도면이다.
도 21을 참조하면, 일 실시예에 따른 옵틱부는 복수 개의 컴포넌트를 포함할 수 있다. 예를 들어,콜리메이션 컴포넌트(210) 및 스티어링 컴포넌트(230)를 포함할 수 있다.
일 실시예에 따르면, 콜리메이션 컴포넌트(210)는 레이저 출력부(100)에서 방출된 빔을 콜리메이션 시키는 역할을 수행할 수 있고, 스티어링 컴포넌트(230)는 콜리메이션 컴포넌트(210)에서 방출된 콜리메이션된 빔을 스티어링 시키는 역할을 수행할 수 있다. 결과적으로, 옵틱부에서 방출되는 레이저 빔은 미리 정해진 방향으로 향하게 될 수 있다.
콜리메이션 컴포넌트(210)는 마이크로 렌즈가 될 수도 있고, 메타표면이 될 수도 있다.
콜리메이션 컴포넌트(210)가 마이크로 렌즈인 경우, 기판의 한쪽 면에 마이크로 렌즈 어레이가 배치될 수도 있고, 기판의 양면에 마이크로 렌즈 어레이가 배치될 수도 있다.
콜리메이션 컴포넌트(210)가 메타표면인 경우, 메타표면에 포함된 복수의 나노기둥에 의해 형성된 나노패턴에 의해 레이저 빔이 콜리메이션될 수 있다.
스티어링 컴포넌트(230)는 마이크로 렌즈가 될 수도 있고, 마이크로 프리즘이 될 수도 있고, 메타표면이 될 수도 있다.
스티어링 컴포넌트(230)가 마이크로 렌즈인 경우, 기판의 한쪽 면에 마이크로 렌즈 어레이가 배치될 수도 있고, 기판의 양면에 마이크로 렌즈 어레이가 배치될 수도 있다.
스티어링 컴포넌트(230)가 마이크로 프리즘인 경우, 마이크로 프리즘의 각도에 의해 스티어링 시킬 수 있다.
스티어링 컴포넌트(230)가 메타표면인 경우, 메타표면에 포함된 복수의 나노기둥에 의해 형성된 나노패턴에 의해 레이저 빔이 스티어링될 수 있다.
도 22는 일 실시예에 따른 옵틱부를 설명하기 위한 도면이다.
도 22를 참조하면, 일 실시예에 따른 옵틱부는 하나의 단일 컴포넌트를 포함할 수 있다. 예를 들어, 메타 컴포넌트(270)를 포함할 수 있다.
일 실시예에 따르면, 메타 컴포넌트(270)는 레이저 출력부(100)에서 출사되는 레이저 빔을 콜리메이션 시킬 수도 있고, 스티어링 시킬 수도 있다.
예를 들어, 메타 컴포넌트(270)는 복수 개의 메타표면을 포함하여, 하나의 메타표면에서는 레이저 출력부(100)에서 출사되는 레이저 빔을 콜리메이션 시키고, 다른 하나의 메타표면에서는 콜리메이션된 레이저 빔을 스티어링시킬 수 있다. 이하의 도 23에서 구체적으로 설명한다.
또는 예를 들어, 메타 컴포넌트(270)는 하나의 메타표면을 포함하여 레이저 출력부(100)에서 출사되는 레이저 빔을 콜리메이션 시키고, 스티어링시킬 수 있다. 이하의 도 24에서 구체적으로 설명한다.
도 23은 일 실시예에 따른 메타 컴포넌트를 설명하기 위한 도면이다.
도 23을 참조하면, 일 실시예에 따른 메타 컴포넌트(270)는 복수 개의 메타표면(271, 273)을 포함할 수 있다. 예를 들어, 제1 메타표면(271) 및 제2 메타표면(273)을 포함할 수 있다.
제1 메타표면(271)은 레이저 출력부(100)에서 레이저 빔이 출사되는 방향에 배치될 수 있다. 제1 메타표면(271)은 복수 개의 나노기둥을 포함할 수 있다. 제1 메타표면은 복수 개의 나노기둥에 의해 나노패턴을 형성할 수 있다. 제1 메타표면(271)은 상기 형성된 나노패턴에 의해 레이저 출력부(100)에서 출사되는 레이저 빔을 콜리메이션시킬 수 있다.
제2 메타표면(273)은 제1 메타표면(271)에서 레이저 빔이 출력되는 방향에 배치될 수 있다. 제2 메타표면(273)은 복수 개의 나노기둥을 포함할 수 있다. 제2 메타표면(273)은 복수 개의 나노기둥에 의해 나노패턴을 형성할 수 있다. 제2 메타표면(273)은 상기 형성된 나노패턴에 의해 레이저 출력부(100)에서 출사되는 레이저 빔을 스티어링시킬 수 있다. 예를 들어, 도 23에 도시된 바와 같이, 복수 개의 나노기둥의 폭(W)의 증감률에 의해 레이저 빔을 특정 방향으로 스티어링시킬 수 있다. 또한, 복수 개의 나노기둥들의 간격(P), 높이(H) 및 단위 길이 당 개수 등에 의해 레이저 빔을 특정 방향으로 스티어링시킬 수 있다.
도 24는 다른 일 실시예에 따른 메타 컴포넌트를 설명하기 위한 도면이다.
도 24를 참조하면, 일 실시예에 따른 메타 컴포넌트(270)는 하나의 메타표면(274)을 포함할 수 있다.
메타표면(275)은 양면에 복수의 나노기둥을 포함할 수 있다. 예를 들어, 메타표면(275)은 제1 면에 제1 나노기둥세트(276)를 포함하고, 제2 면에 제2 나노기둥세트(278)를 포함할 수 있다.
메타표면(275)은 양면에 각각의 나노패턴을 형성하는 복수의 나노기둥에 의해, 레이저 출력부(100)에서 출사되는 레이저 빔을 콜리메이션 시킨 후 스티어링시킬 수 있다.
예를 들어, 메타표면(275)의 일측에 배치된 제1 나노기둥세트(276)는 나노패턴을 형성할 수 있다. 제1 나노기둥세트(276)에 의해 형성된 상기 나노패턴에 의해 레이저 출력부(100)에서 출사되는 레이저 빔을 콜리메이션시킬 수 있다. 메타표면(275)의 타측에 배치된 제2 나노기둥세트(278)는 나노패턴을 형성할 수 있다. 제2 나노기둥세트(278)에 의해 형성된 상기 나노패턴에 의해 제1 나노기둥(276)을 거친 레이저 빔이 특정 방향으로 스티어링될 수 있다.
이하에서는 본 출원의 일 실시예에 따른 라이다 장치에 대해 설명한다.
도 25는 일 실시예에 따른 빅셀 모듈을 나타내는 도면이다.
도 25를 참조하면 일 실시예에 따른 빅셀 모듈(2100)은 바디(2101), 제1 면(2102) 및 레이저 출력부(2130)를 포함할 수 있다. 또한, 레이저 출력부(2130)는 제1 빅셀 어레이(2110) 및 제2 빅셀 어레이(2120)를 포함할 수 있다.
도 25는 제1 빅셀 어레이(2110) 및 제2 빅셀 어레이(2120)가 상하로 배치된 빅셀 모듈을 도시하고 있으나, 이에 한정되지 않는다.
일 예로, 레이저 출력부(2130)는 제1 빅셀 어레이(2110) 및 제2 빅셀 어레이(2120) 중 하나의 빅셀 어레이만 포함할 수도 있고, 레이저 출력부(2130)에 제1 빅셀 어레이(2110) 및 제2 빅셀 어레이(2120)가 좌우로 배치될 수도 있으며, 레이저 출력부(2130)가 제1 빅셀 어레이(2110) 및 제2 빅셀 어레이(2120)와 함께 추가적인 빅셀 어레이를 포함할 수도 있다.
빅셀 모듈(2100)은 레이저 출력부(2130), 레이저 수광부 및 컨트롤러를 포함할 수 있다. 또한, 빅셀 모듈(2100)은 복수 개의 옵틱을 포함할 수 있다.
빅셀 모듈(2100)은 복수의 면을 가질 수 있다. 예를 들어 빅셀 모듈(2100)은 다각 기둥, 원기둥, 다각뿔, 원뿔 등의 형태일 수 있으나, 이에 한정되지 않는다.
빅셀 모듈(2100)은 합성수지, 금속 또는 이들의 결합일 수 있다.
빅셀 모듈(2100)의 일 면에는 레이저 출력부(2130)가 배치될 수 있다. 상기 레이저 출력부(2130)는 하나일 수 있으나 복수 개가 될 수도 있다. 상기 레이저 출력부(2130)가 복수 개인 경우, 상기 레이저 출력부(2130)에 포함되는 제1 레이저 출력부는 제2 레이저 출력부와 동일한 면에 배치될 수도 있고, 다른 면에 배치될 수도 있다.
또한, 빅셀 모듈(2100)의 일 면에는 레이저 출력부(2130)가 상기 빅셀 모듈(2100)의 외부에 배치될 수도 있으나, 상기 빅셀 모듈(2100)의 내부에 배치될 수도 있다.
빅셀 모듈(2100)은 투명할 수 있다. 예를 들어, 레이저 출력부(2130)가 배치되는 면은 투명할 수 있다.
일 실시예에 따르면, 빅셀 모듈(2100)은 레이저 출력부(2130)가 빅셀 모듈(2100)의 외부 배치되는 경우 레이저 출력부(2130)가 빅셀 모듈(2100)의 내부를 향하여 레이저 빔을 조사할 때 레이저 빔이 빅셀 모듈(2100)을 통과하도록 투명한 재질일 수 있다.
또한 일 실시예에 따르면, 빅셀 모듈(2100)은 레이저 출력부(2130)가 빅셀 모듈(2100)의 내부 배치되는 경우 레이저 출력부(2130)가 빅셀 모듈(2100)의 외부를 향하여 레이저 빔을 조사할 때 레이저 빔이 빅셀 모듈(2100)을 통과하도록 투명한 재질일 수 있다.
또한, 빅셀 모듈(2100)의 일 면에는 레이저 수광부가 배치될 수 있다. 상기 레이저 수광부는 하나일 수 있으나 복수 개가 될 수도 있다. 상기 레이저 수광부가 복수 개인 경우, 상기 레이저 수광부에 포함되는 제1 레이저 수광부는 제2 레이저 수광부와 동일한 면에 배치될 수도 있고, 다른 면에 배치될 수도 있다.
빅셀 모듈(2100) 내에서, 상기 레이저 출력부(2130)가 배치된 면과 상기 레이저 수광부가 배치된 면은 같을 수도 있으나, 다를 수도 있다.
빅셀 모듈(2100)의 일 면에는 컨트롤러가 배치될 수 있다. 상기 컨트롤러가 배치되는 면은 레이저 출력부 또는 레이저 수광부가 배치된 면과 같을 수도 있으나, 다를 수도 있다.
또는, 빅셀 모듈(2100)은 내부에 컨트롤러를 수용할 수도 있다. 또는, 빅셀 모듈(2100)의 외부에 컨트롤러가 배치될 수도 있다.
일 실시예에 따르면, 빅셀 모듈(2100)은 컨트롤러에 의해 레이저 출력부(2130)로부터 레이저 빔을 출력할 수 있다. 빅셀 모듈(2100)은 레이저 출력부(2130)에 의해 대상체를 향해 레이저 빔을 출력할 수 있다.
또한, 빅셀 모듈(2100)은 레이저 빔의 출광 시점을 획득할 수 있다. 예를 들어, 빅셀 모듈(2100)은 컨트롤러에 의해 레이저 빔의 출광 시점을 획득할 수 있다.
일 실시예에 따르면, 빅셀 모듈(2100)은 대상체로 레이저 빔을 조사한다. 이때, 상기 빅셀 모듈(2100)이 조사한 레이저 빔은 일정한 FOV(Field Of View)를 형성한다. 상기 FOV는 수평 FOV(horizontal FOV) 또는 수직 FOV(vertical FOV)를 포함할 수 있다.
상기 수평 FOV는 상기 모듈의 수평축에 따를 수 있다. 또한, 상기 수직 FOV는 상기 모듈의 수직축에 따를 수 있다.
또한, 빅셀 모듈(2100)의 FOV는 레이저 출력부(2130)에 의해 정해질 수 있다. 예를 들어, 빅셀 모듈(2100)의 수평 FOV는 레이저 출력부(2130)의 수평 FOV 이거나, 복수 개의 레이저 출력부의 수평 FOV의 합과 같거나 작을 수 있으나, 이에 한정되지 않는다. 또한, 예를 들어, 빅셀 모듈(2100)의 수직 FOV는 레이저 출력부(2130)의 수직 FOV 이거나, 복수 개의 레이저 출력부의 수직 FOV의 합과 같거나 작을 수 있으나, 이에 한정되지 않는다.
또한, 빅셀 모듈(2100)의 수평 FOV는 제1 빅셀 어레이(2110)의 스티어링 각도, 제2 빅셀 어레이(2120)의 스티어링 각도 및 레이더 빔의 다이버전스(divergence)에 기초하여 정의될 수 있다.
예를 들어, 각 빅셀 어레이의 수평 FOV가 30도인 경우, 레이저 출력부(2130) 또는 빅셀 모듈(2100)의 수평 FOV는 60도 이거나 60도 이하일 수 있으나, 이에 한정되지 않는다.
또한 예를 들어, 각 빅셀 어레이의 수직 FOV가 30도인 경우, 레이저 출력부(2130) 또는 빅셀 모듈(2100)의 수직 FOV는 30도일 수 있으나, 이에 한정되지 않는다.
또한 일 실시예에 따르면, 빅셀 모듈(2100)은 대상체로부터 반사된 레이저 빔을 수광할 수 있다. 예를 들어, 빅셀 모듈(2100)은 레이저 수광부에 의해 대상체로부터 반사된 레이저 빔을 수광할 수 있다.
또한, 빅셀 모듈(2100)은 레이저 빔의 수광 시점을 획득할 수 있다. 예를 들어, 빅셀 모듈(2100)은 컨트롤러에 의해 레이저 빔의 수광 시점을 획득할 수 있다.
일 실시예에 따르면, 컨트롤러는 수광부에 의해 레이저 빔의 수광 시점을 획득할 수 있다.
예를 들어, 컨트롤러는 SPAD array에 의해 레이저 빔의 수광 시점을 획득할 수 있으나, 이에 한정되지 않는다. 이때, 컨트롤러는 SPAD array에 의해 산출된 히스토그램을 이용하여 레이저 빔의 수광 시점을 획득할 수 있으나, 이에 한정되지 않는다.
일 실시예에 따르면 빅셀 모듈(2100)은 레이저 출력부(2130)가 배치되는 제1 면(2102)을 갖는다. 상기 제1 면은 대상체를 향하는 방향에 배치될 수 있다.
또한, 제1 면에는 하나의 레이저 출력부(2130)가 배치될 수도 있으나, 복수 개의 레이저 출력부(2130)가 배치될 수도 있다.
또한, 제1 면에는 레이저 수광부가 배치될 수도 있으나, 이에 한정되지 않는다.
또한, 제1 면은 평평한 면일 수도 있으나, 곡면이거나 단층을 이룰 수도 있다.
일 실시예에 따르면 레이저 출력부(2130)는 빅셀 모듈(2100)의 일면에 배치될 수 있다. 예를 들어, 빅셀 모듈(2100)이 대상체를 향하는 일면에 배치될 수 있다. 예를 들어, 빅셀 모듈(2100)의 제1 면(2102)에 배치될 수도 있다.
일 실시예에 따르면 레이저 출력부(2130)는 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser)을 포함할 수 있다. 상기 빅셀은 빅셀 모듈(2100)의 제1 면(2102)에 배치되어, 제1 면(2102)에 수직인 레이저 빔을 출력할 수 있다.
예를 들어, 레이저 출력부(2130)는 복수 개의 빅셀 이미터(emitter)를 포함할 수 있다.
또한, 예를 들어, 레이저 출력부(2130)는 복수 개의 빅셀 이미터를 포함하는 복수 개의 빅셀 유닛(unit)을 포함할 수 있다.
또한, 예를 들어, 레이저 출력부(2130)는 복수 개의 빅셀 유닛을 포함하는 복수 개의 빅셀 어레이(array)를 포함할 수 있다.
일 실시예에 따르면 레이저 출력부(2130)는 대상체를 향해 레이저 빔을 출력할 수 있다. 예를 들어, 레이저 출력부(2130)는 컨트롤러에 의해 대상체를 향해 레이저 빔을 출력할 수 있다.
또한, 일 실시예에 따르면 레이저 출력부(2130)는 제1 빅셀 어레이(2110) 및 제2 빅셀 어레이(2120)를 포함할 수 있다.
또한, 일 실시예에 따르면, 제1 빅셀 어레이(2110) 및 제2 빅셀 어레이(2120)는 이격되어 배치될 수도 있고, 인접하게 배치될 수도 있다. 예를 들어, 제1 빅셀 어레이(2110) 및 제2 빅셀 어레이(2120)는 빅셀 모듈(2100)의 제1 면(2102)에 이격되어 배치될 수도 있고, 인접하게 배치될 수도 있다.
일 실시예에 따르면, 레이저 출력부(2130)는 대상체로 레이저 빔을 조사한다. 이때, 상기 레이저 출력부(2130)가 조사한 레이저 빔은 일정한 FOV(Field Of View)를 형성한다. 상기 FOV는 수평 FOV(horizontal FOV) 또는 수직 FOV(vertical FOV)를 포함할 수 있다.
또한, 레이저 출력부(2130)의 FOV는 제1 빅셀 어레이(2110) 및 제2 빅셀 어레이(2120)에 의해 정해질 수 있다. 예를 들어, 레이저 출력부(2130)의 수평 FOV는 제1 빅셀 어레이(2110) 및 제2 빅셀 어레이(2120)의 수평 FOV의 합과 같거나 작을 수 있으나, 이에 한정되지 않는다. 또한, 예를 들어, 레이저 출력부(2130)의 수직 FOV는 제1 빅셀 어레이(2110) 및 제2 빅셀 어레이(2120)의 수직 FOV의 합과 같거나 작을 수 있으나, 이에 한정되지 않는다.
또한, 빅셀 모듈(2100)의 수평 FOV는 제1 빅셀 어레이(2110)의 스티어링 각도, 제2 빅셀 어레이(2120)의 스티어링 각도 및 레이더 빔의 다이버전스(divergence)에 기초하여 정의될 수 있다.
일 실시예에 따르면, 제1 빅셀 어레이(2110)는 빅셀 모듈(2100)에 배치될 수 있다. 예를 들어, 제1 빅셀 어레이(2110)는 빅셀 모듈(2100)의 제1 면(2102)에 배치될 수 있다.
또한 일 실시예에 따르면, 제1 빅셀 어레이(2110)는 복수 개의 빅셀 유닛을 포함하는 빅셀 어레이일 수 있으나, 빅셀 유닛일 수도 있다.
또한 일 실시예에 따르면, 제1 빅셀 어레이(2110)는 일정한 FOV를 형성한다. 예를 들어, 제1 빅셀 어레이(2110)는 수평 FOV 및 수직 FOV를 형성한다.
일 실시예에 따르면, 제2 빅셀 어레이(2120)는 빅셀 모듈(2100)에 배치될 수 있다. 예를 들어, 제2 빅셀 어레이(2120)는 빅셀 모듈(2100)의 제2 면(2102)에 배치될 수 있다.
또한 일 실시예에 따르면, 제2 빅셀 어레이(2120)는 복수 개의 빅셀 유닛을 포함하는 빅셀 어레이일 수 있으나, 빅셀 유닛일 수도 있다.
또한 일 실시예에 따르면, 제2 빅셀 어레이(2120)는 일정한 FOV를 형성한다. 예를 들어, 제2 빅셀 어레이(2120)는 수평 FOV 및 수직 FOV를 형성한다.
일 실시예에 따르면, 제1 빅셀 어레이(2110)와 제2 빅셀 어레이(2120)는 동일할 수도 있고, 다를 수도 있다.
예를 들어, 제1 빅셀 어레이(2110)와 제2 빅셀 어레이(2120)는 빅셀 유닛의 개수 또는 빅셀 이미터의 개수가 동일할 수 있으나, 이에 한정되지 않는다. 또한 예를 들어, 제1 빅셀 어레이(2110)와 제2 빅셀 어레이(2120)는 FOV 또는 조사 범위의 각도가 동일할 수 있으나, 이에 한정되지 않는다. 또한 예를 들어, 제1 빅셀 어레이(2110)와 제2 빅셀 어레이(2120)는 크기 또는 재질이 동일할 수 있으나, 이에 한정되지 않는다.
제1 빅셀 어레이(2110)와 제2 빅셀 어레이(2120)가 동일한 경우, 제2 빅셀 어레이(2120)는 제1 빅셀 어레이(2110)를 180도 회전한 것일 수 있으나, 이에 한정되지 않는다.
제1 빅셀 어레이(2110)와 제2 빅셀 어레이(2120)의 FOV 각도는 동일할 수도 있고, 다를 수도 있다.
제1 빅셀 어레이(2110)와 제2 빅셀 어레이(2120)의 FOV 각도가 동일할 경우, 제1 빅셀 어레이(2110)의 수평 FOV는 제2 빅셀 어레이(2120)의 수평 FOV와 동일할 수 있다. 또한, 제1 빅셀 어레이(2110)의 수직 FOV는 제2 빅셀 어레이(2120)의 수직 FOV와 동일할 수 있다.
제1 빅셀 어레이(2110)의 수평 FOV와 제2 빅셀 어레이(2120)의 수평 FOV는 동일한 각도를 가지나, 조사 범위가 다를 수 있다. 예를 들어, 제1 빅셀 어레이(2110)의 수평 FOV와 제2 빅셀 어레이(2120)의 수평 FOV가 N°인 경우, 제1 빅셀 어레이(2110)의 수평 FOV 조사 범위는 -N°~ 0°이고, 제2 빅셀 어레이(2120)의 수평 FOV 조사 범위는 0°~ N°일 수 있으나, 이에 한정되지 않는다.
또는, 제1 빅셀 어레이(2110)의 수평 FOV와 제2 빅셀 어레이(2120)의 수평 FOV가 일부 오버랩될 수 있다. 예를 들어, 제1 빅셀 어레이(2110)의 수평 FOV 조사 범위는 -N°~ M°이고, 제2 빅셀 어레이(2120)의 수평 FOV 조사 범위는 -M°~ N°일 수 있으나, 이에 한정되지 않는다.
일 실시예에 따르면, 제1 빅셀 어레이(2110) 및 제2 빅셀 어레이(2120)는 이격되어 배치될 수도 있고, 인접하게 배치될 수도 있다.
도 26은 일 실시예에 따른 레이저 출력부를 나타내는 도면이다.
도 26을 참조하면, 일 실시예에 따른 레이저 출력부(2150)는 레이저 출력 소자(2151), 복수개의 옵틱, 예를 들어 제1 옵틱(2152) 및 제2 옵틱(2153)을 포함할 수 있다.
일 실시예에 따르면, 레이저 출력부(2130)는 옵틱에 의해 레이저 출력 소자로부터 출력된 레이저 빔의 비행 경로를 변경할 수 있다.
상기 옵틱은 예를 들어, OPA(Optical Phased Array), 렌즈(lens), 마이크로 렌즈(microlens), 마이크로 렌즈 어레이(microlens array), 프리즘(prism), 마이크로 프리즘(microprism), 마이크로 프리즘 어레이(microprism array) 및 메타 표면(metasurfa)를 포함할 수 있다.
상기 옵틱은 레이저 출력 소자로부터 출력된 레이저 빔을 콜리메이션(collimation)시킬 수 있다. 또한, 상기 옵틱은 레이저 출력 소자로부터 출력된 레이저 빔을 일방향으로 스티어링(steering)시킬 수 있다. 또는, 상기 옵틱은 레이저 출력 소자로부터 출력된 레이저 빔을 콜리메이션 시키고 나서, 일방향으로 스티어링시킬 수 있다.
일 실시예에 따르면, 레이저 출력 소자(2151)는 빅셀 이미터, 빅셀 유닛, 빅셀 어레이 중 하나가 될 수 있다. 레이저 출력 소자는 빅셀 모듈(2100)의 바디(2101)의 제1 면(2102)에 배치될 수 있다.
일 실시예에 따르면, 제1 옵틱(2152)는 레이저 빔을 콜리메이션 시킬 수 있다. 또한, 제2 옵틱(2153)은 레이저 빔을 스티어링 시킬 수 있다.
일 실시예에 따르면, 제1 옵틱(2152)은 레이저 출력 소자(2151)로부터 레이저 빔이 출력되는 방향에 배치될 수 있다. 또한, 제2 옵틱(2153)은 제1 옵틱(2152)으로부터 레이저 빔이 출력되는 방향에 배치될 수 있으나, 이에 한정되지 않는다.
또한 일 실시예에 따르면, 레이저 출력 소자(2151), 제1 옵틱(2152) 및 제2 옵틱(2153)은 인접하여 배치될 수 있거나 이격되어 배치될 수 있다.
또한 다른 일 실시예에 따르면, 제1 옵틱(2152) 및 제2 옵틱(2153)의 기능은 또 다른 하나의 옵틱에 의해 구현될 수 있으나, 이에 한정되지 않는다.
도 27 내지 도 29를 참조하면 일 실시예에 따른 빅셀 모듈(2100)은 바디(2101), 제1 면(2102) 및 레이저 출력부(2130)를 포함할 수 있다. 또한, 레이저 출력부(2130)는 제1 빅셀 어레이(2110) 및 제2 빅셀 어레이(2120)를 포함할 수 있다.
도 27에 도시된 바와 같이, 제1 빅셀 어레이(2110)는 제1 수평 FOV(2111)를 형성할 수 있다. 또한, 제2 빅셀 어레이(2120)는 제2 수평 FOV(2121)를 형성할 수 있다.
도 27에서는 레이저 빔이 한 점에서 조사되는 것처럼 도시되었으나, 이는 수평 FOV를 설명하기 위해 편의상 도시된 도면이다. 이에 한정되지 않고, 레이저 빔은 빅셀 어레이(2110, 2120)에 대하여 한 점에서 출력되지 않고 여러 지점에서 조사될 수 있다.
상기 제1 수평 FOV(2111) 및 상기 제2 수평 FOV(2121)는 오버랩될 수 있으나, 이에 한정되지 않는다.
도 28에 도시된 바와 같이, 제1 빅셀 어레이(2110)는 제1 수평 FOV(2111)를 형성할 수 있다. 또한, 제2 빅셀 어레이(2120)는 제2 수평 FOV(2121)를 형성할 수 있다.
도 28에서는 레이저 빔이 한 점에서 조사되는 것처럼 도시되었으나, 이는 수평 FOV를 설명하기 위해 편의상 도시된 도면이다. 이에 한정되지 않고, 레이저 빔은 빅셀 어레이(2110, 2120)에 대하여 한 점에서 출력되지 않고 여러 지점에서 조사될 수 있다.
빅셀 모듈(2100)의 제1 면(2102)의 수평축은 제1 축(a1)으로 정의될 수 있고, 빅셀 모듈(2100)의 제1 면(2102)의 수직축은 제2 축(a2)으로 정의될 수 있다. 제1 축(a1)과 제2 축(a2)은 직교할 수 있다.
상기 제1 수평 FOV(2111) 및 상기 제2 수평 FOV(2121)는 제2 축(a2)을 기준으로 서로 대칭일 수 있으나, 이에 한정되지 않는다. 또한, 상기 제1 수평 FOV(2111) 및 상기 제2 수평 FOV(2121)는 빅셀 모듈(2100)의 제1 면(2102)과 수직인 면을 기준으로 서로 대칭일 수 있으나, 이에 한정되지 않는다.
일 실시예에 따르면, 제2 빅셀 어레이(2120)는 제1 빅셀 어레이(2110)를 180도 회전한 것일 수 있다. 이는 제조 과정에서, 동일한 빅셀 어레이를 복수 개 제조한 후, 빅셀 모듈(2100)에 배치할 때, 동일한 빅셀 어레이들 중 하나를 배치하고, 동일한 빅셀 어레이들 중 다른 하나를 상기 배치된 빅셀 어레이를 기준으로 180도 회전을 시킨 후 빅셀 모듈에 배치할 수 있다.
이와 같이, 동일한 빅셀 어레이를 180도 회전하여 배치하는 것은 제조 과정의 간편함을 줄 뿐만 아니라, 빅셀 어레이들의 스티어링 범위가 대칭됨으로써 스티어링의 효율성을 증대시킬 수 있다.
원하는 빅셀 모듈의 수평 FOV가 2N도일 때, 레이저 출력부에 포함된 옵틱에 의해서는 2N도를 충족시키지 못할 수 있다. 예를 들어, 원하는 빅셀 모듈의 수평 FOV가 60도일 때, 레이저 출력부에 포함된 옵틱 중 일 예인 마이크로 프리즘의 경우, 60도의 스티어링 각도를 만들기 위해서는 다양한 각도를 갖는 마이크로 프리즘이 포함되어야 한다. 그러나, 현실적으로 마이크로 프리즘의 각도를 특정 각도 이하로 구현하는 데에 문제가 있을 수 있다. 마이크로 프리즘의 각도가 예시로 특정 각도 이하인 경우, 스티어링 효율이 급격히 감소될 수 있다. 예를 들어, 마이크로 프리즘의 각도가 0.25도 이하인 경우, 구현의 어려움과 스티어링 효율의 감소가 발생할 수 있으나, 이에 한정되지 않는다.
위와 같은 문제를 해결하기 위해, 복수 개의 빅셀 어레이를 사용할 수 있다. 예를 들어, 원하는 빅셀 모듈의 수평 FOV가 2N도일 때, N도의 수평 FOV를 갖는 복수 개의 빅셀 어레이를 사용할 수 있다.
예를 들어, 원하는 빅셀 모듈의 수평 FOV가 60도일 때, 레이저 출력부는 수평 FOV가 30도인 빅셀 어레이 2개를 포함할 수 있다. 이때, 복수 개의 빅셀 어레이 중 하나는 -30도에서 0도의 FOV를 커버하고, 복수 개의 빅셀 어레이 중 다른 하나는 0도에서 +30도의 FOV를 커버하여, 결과적으로 레이저 출력부의 수평 FOV는 60도로 형성될 수 있다. 레이저 출력부의 수평 FOV는 빅셀 모듈의 수평 FOV일 수 있으므로, 결과적으로 빅셀 모듈의 수평 FOV는 60도로 형성될 수 있다.
도 29에 도시된 바와 같이, 제1 빅셀 어레이(2110)는 제1 수직 FOV(2112)를 형성할 수 있다. 또한, 제2 빅셀 어레이(2120)는 제2 수직 FOV(2122)를 형성할 수 있다.
도 29에서는 레이저 빔이 한 점에서 조사되는 것처럼 도시되었으나, 이는 수평 FOV를 설명하기 위해 편의상 도시된 도면이다. 이에 한정되지 않고, 레이저 빔은 빅셀 어레이(2110, 2120)에 대하여 한 점에서 출력되지 않고 여러 지점에서 조사될 수 있다.
제1 빅셀 어레이(2110) 및 제2 빅셀 어레이(2120)는 제1 면(2102)의 수직축을 따라 수직 FOV(2112, 2122)를 형성할 수 있다. 예를 들어, 제1 빅셀 어레이(2110) 및 제2 빅셀 어레이(2120)의 수직 FOV(2112, 2122)는 레이저 출력부에 포함된 복수 개의 옵틱에 의해 형성될 수도 있고, 하나의 옵틱에 의해 형성될 수도 있으나, 이에 한정되지 않는다.
제1 수직 FOV(2112) 및 제2 수직 FOV(2122)는 동일한 조사 각도를 가질 수 있다. 예를 들어, 제1 수직 FOV(2112) 및 제2 수직 FOV(2122)는 30도의 조사 각도를 가질 수 있으나, 이에 한정되지 않는다.
또한, 제1 수직 FOV(2112) 및 제2 수직 FOV(2122)는 오버랩될 수 있으나, 이에 한정되지 않는다.
일 실시예에 따르면, 레이저 출력부의 수직 FOV는 제1 빅셀 어레이(2110) 및 제2 빅셀 어레이(2120)의 수직 FOV의 합과 같거나 그 이하일 수 있다. 또한 일 실시예에 따르면, 빅셀 모듈(2100)의 수직 FOV는 제1 빅셀 어레이(2110) 및 제2 빅셀 어레이(2120)의 수직 FOV의 합과 같거나 그 이하일 수 있다.
또한, 빅셀 모듈(2100)의 수직 FOV는 제1 빅셀 어레이(2110)의 스티어링 각도, 제2 빅셀 어레이(2120)의 스티어링 각도 및 레이더 빔의 다이버전스(divergence)에 기초하여 정의될 수 있다.
도 30 내지 도 31은 일 실시예에 따른 빅셀 모듈의 수평 FOV를 위에서 바라본 도면이다.
도 30 내지 도 31을 참조하면, 제1 빅셀 어레이(2110) 및 제2 빅셀 어레이(2120)는 제1 축(a1)을 기준으로 수평 FOV를 형성한다. 제1 빅셀 어레이(2110)는 제1 축(a1)을 기준으로 제1 수평 FOV(2111)를 형성한다. 제2 빅셀 어레이(2120)는 제1 축(a1)을 기준으로 제2 수평 FOV(2121)를 형성한다.
제1 수평 FOV(2111) 및 제2 수평 FOV(2121)는 오버랩될 수 있으나, 이에 한정되지 않는다.
도 31을 참조하면, 제1 수평 FOV(2111)는 최외곽 레이저 빔(2113, 2114, 2123, 2124)을 포함할 수 있다.
예를 들어, 최외곽 레이저 빔은 빅셀 어레이 중 조사 각도가 최대인 레이저 빔과 최소인 레이저 빔을 일컫는 것일 수 있으나, 이에 한정되지 않는다.
예를 들어, 레이저 빔의 위치값은 빅셀 어레이와 이격된 가상의 평면에 대하여 제1 축(a1)을 기준으로 정해질 수 있다. 예를 들어, 레이저 빔들 중 (2113, 2114) 빅셀 어레이와 이격된 가상의 평에 대하여 제1 축(a1)을 기준으로, 레이저 빔(2114)의 위치값이 레이저 빔(2113)의 위치값보다 클 수 있다.
예를 들어, 제1 수평 FOV(2111)는 최외곽 레이저 빔 중 제1 축(a1)을 기준으로 위치값이 큰 레이저 빔인 제1 레이저 빔(2114)을 포함할 수 있다. 또한 예를 들어, 제2 수평 FOV(2121)는 최외곽 레이저 빔 중 제1 축(a1)을 기준으로 위치값이 작은 레이저 빔인 제2 레이저 빔(2123)을 포함할 수 있다.
일 실시예에 따르면, 제1 레이저 빔(2114) 및 제2 레이저 빔(2123)의 진행 방향은 동일할 수 있다. 이때, 제1 레이저 빔(2113) 및 제2 레이저 빔(2123)의 진행 방향은 제1 축(a1)에 수직인 방향일 수 있다. 또한, 제1 레이저 빔(2113) 및 제2 레이저 빔(2123)의 진행 방향은 제1 면(2102)에 수직일 수 있다.
도 32 내지 도 34는 일 실시예에 따른 빅셀 모듈의 수평 FOV를 정면에서 바라본 도면이다.
도 32 내지 도 34를 참조하면, 제1 빅셀 어레이(2110) 및 제2 빅셀 어레이(2120)는 제1 축(a1)을 기준으로 수평 FOV를 형성한다. 제1 빅셀 어레이(2110)는 제1 축(a1)을 기준으로 제1 수평 FOV(2111)를 형성한다. 제2 빅셀 어레이(2120)는 제1 축(a1)을 기준으로 제2 수평 FOV(2121)를 형성한다.
제1 수평 FOV(2111) 및 제2 수평 FOV(2121)는 오버랩될 수 있으나, 이에 한정되지 않는다.
도 33을 참조하면, 제1 수평 FOV(2111)는 제1 영역(2131) 및 제2 영역(2117)을 포함할 수 있다. 상기 제1 영역(2131)은 제2 수평 FOV(2121)와 오버랩되는 영역일 수 있다. 상기 제2 영역(2117)은 제2 수평 FOV(2121)와 오버랩되지 않는 영역일 수 있다.
제2 수평 FOV(2121)는 제1 영역(2131) 및 제3 영역(2127)을 포함할 수 있다. 상기 제1 영역(2131)은 제1 수평 FOV(2121)와 오버랩되는 영역일 수 있다. 상기 제3 영역(2127)은 제1 수평 FOV(2121)와 오버랩되지 않는 영역일 수 있다.
도 34를 참조하면, 제1 수평 FOV(2111)는 제1 면(2102)에 수직인 방향으로 출력되는 레이저 빔(2116) 및 제1 면(2102)에 수직이 아닌 방향으로 출력되는 레이저 빔(2115)에 의해 형성될 수 있다.
제1 면(2102)에 수직인 방향으로 출력되는 레이저 빔(2116) 및 제1 면(2102)에 수직이 아닌 방향으로 출력되는 레이저 빔(2115)은 빅셀 어레이에 포함된 빅셀 이미터의 배치나 옵틱에 의해 출력될 수 있다. 즉, 레이저 빔의 방향은 빅셀 이미터의 배치나 옵틱에 의해 결정될 수 있다.
도 34에 의하면, 제1 면(2102)에 수직인 방향으로 출력되는 레이저 빔(2116)이 화살표 한 개로 도시되어 있으나, 이에 한정되지 않고, 복수 개의 레이저 빔이 제1 면(2102)에 수직인 방향으로 출력될 수 있다.
또한, 제2 수평 FOV(2121)는 제1 면(2102)에 수직인 방향으로 출력되는 레이저 빔(2126) 및 제1 면(2102)에 수직이 아닌 방향으로 출력되는 레이저 빔(2125)에 의해 형성될 수 있다.
제1 영역(2131)은 제1 수평 FOV(2111)와 제2 수평 FOV(2121)가 오버랩되는 영역일 수 있다.
일 실시예에 따르면, 제1 영역(2131)은 수평 FOV를 형성하기 위해 여러가지 방향으로 출력되는 레이저 빔에 의해 형성될 수 있다.
예를 들어, 제1 영역(2131)은 제1 수평 FOV(2111)를 형성하는 레이저 빔 중 제1 면(2102)에 수직인 방향으로 출력되는 레이저 빔(2116)에 의해 형성되는 영역일 수 있다. 또한, 제1 영역(2131)은 제1 수평 FOV(2111)를 형성하는 레이저 빔 중 제1 면(2102)에 수직이 아닌 방향으로 출력되는 레이저 빔(2115)에 의해 형성되는 영역일 수 있다.
또한, 예를 들어 제1 영역(2131)은 제2 수평 FOV(2121)를 형성하는 레이저 빔 중 제1 면(2102)에 수직인 방향으로 출력되는 레이저 빔(2126)에 의해 형성되는 영역일 수 있다. 또한, 제1 영역(2131)은 제2 수평 FOV(2121)를 형성하는 레이저 빔 중 제1 면(2102)에 수직이 아닌 방향으로 출력되는 레이저 빔(2125)에 의해 형성되는 영역일 수 있다.
도 30 내지 도 34를 통한 빅셀 모듈(2100)의 수평 FOV에 대한 설명은 아래의 도 36 내지 도 39에 도시된 빅셀 모듈(2200)에서도 적용될 수 있다.
도 35는 일 실시예에 따른 라이다 장치를 나타내는 도면이다.
도 35를 참조하면, 일 실시예에 따른 라이다 장치(2001)는 복수 개의 빅셀 모듈(2100)을 포함할 수 있다.
일 실시예에 따른 라이다 장치(2001)는 복수 개의 빅셀 모듈(2100)이 인접하게 배치된 형태일 수도 있고, 이격되어 배치된 형태일 수도 있다. 예를 들어, 상기 라이다 장치(2001)가 복수 개의 빅셀 모듈(2100)이 인접하게 배치되는 형태인 경우, 인접한 빅셀 모듈(2100)은 서로 한 면을 공유할 수 있다.
또한, 일 실시예에 따른 라이다 장치(2001)는 인접하는 빅셀 모듈(2100)들의 레이저 출력부(2130)가 배치되는 제1 면(2102)이 각도를 형성하도록 배치되거나 곡면을 이루도록 배치할 수도 있고, 각도를 형성하지 않거나 직선을 이루도록 배치할 수도 있다.
또한, 일 실시예에 따른 라이다 장치(2001) 또는 빅셀 모듈의 수평 FOV가 N°인 경우, 사용자가 원하는 라이다 장치 전체의 수평 FOV인 M°를 만족시키기 위해 M/N개의 빅셀 모듈을 포함할 수 있다.
예를 들어, 빅셀 모듈의 수평 FOV가 60°인 경우, 사용자가 원하는 라이다 장치 전체의 수평 FOV인 180°를 만족시키기 위해 3개의 빅셀 모듈을 포함할 수 있다. 이때, 빅셀 모듈의 수평 FOV 60도는 복수 개의 빅셀 어레이에 의해 형성될 수 있다. 예를 들어, 30도의 수평 FOV를 갖는 2개의 빅셀 어레이에 의해 빅셀 모듈의 수평 FOV 60도가 형성될 수 있다. 이때, 라이다 장치는 30도의 수평 FOV를 갖는 2개의 빅셀 어레이를 포함하는 60도의 수평 FOV를 갖는 3개의 빅셀 모듈을 포함할 수 있다.
도 36 내지 도 39는 다른 일 실시예에 따른 빅셀 모듈을 나타내는 도면이다.
도 36 내지 도 39를 참조하면 일 실시예에 따른 빅셀 모듈(2200)은 바디(2201), 제1 면(2202) 및 레이저 출력부(2230)를 포함할 수 있다. 또한, 레이저 출력부(2230)는 제1 빅셀 어레이(2210) 및 제2 빅셀 어레이(2220)를 포함할 수 있다.
도 36은 제1 빅셀 어레이(2210) 및 제2 빅셀 어레이(2220)가 좌우로 배치된 빅셀 모듈을 도시하고 있으나, 이에 한정되지 않는다.
빅셀 모듈(2200)에 대한 설명은 위에서 설명된 빅셀 모듈(2100)의 설명과 중복될 수 있어, 자세한 설명은 생략하기로 한다.
바디(2201)에 대한 설명은 위에서 설명된 바디(2101)의 설명과 중복될 수 있어, 자세한 설명은 생략하기로 한다.
제1 면(2202)에 대한 설명은 위에서 설명된 제1 면(2102)의 설명과 중복될 수 있어, 자세한 설명은 생략하기로 한다.
레이저 출력부(2230)에 대한 설명은 위에서 설명된 레이저 출력부(2130)의 설명과 중복될 수 있어, 자세한 설명은 생략하기로 한다.
제1 빅셀 어레이(2210)에 대한 설명은 위에서 설명된 제1 빅셀 어레이(2110)의 설명과 중복될 수 있어, 자세한 설명은 생략하기로 한다.
제2 빅셀 어레이(2220)에 대한 설명은 위에서 설명된 제1 빅셀 어레이(2120)의 설명과 중복될 수 있어, 자세한 설명은 생략하기로 한다.
도 36을 참조하면, 빅셀 모듈(2200)의 레이저 출력부(2230)는 제1 빅셀 어레이(2210) 및 제2 빅셀 어레이(2220)를 포함할 수 있다.
일 실시예에 따르면, 제1 빅셀 어레이(2210)는 제1 방향으로 레이저 빔을 출력하는 제1 빅셀 유닛을 포함할 수 있다. 또한 제1 빅셀 어레이(2210)는 제2 방향으로 레이저 빔을 출력하는 제2 빅셀 유닛을 포함할 수 있다.
이때, 상기 제1 방향과 상기 제2 방향은 동일할 수 있으나 다를 수도 있다. 예를 들어, 상기 제1 방향과 상기 제2 방향의 차이는 0.104도일 수 있으나, 이에 한정되지 않는다.
일 실시예에 따르면, 제2 빅셀 어레이(2220)는 제3 방향으로 레이저 빔을 출력하는 제3 빅셀 유닛을 포함할 수 있다.
이때, 제3 방향은 제1 방향과 동일할 수 있으나 다를 수도 있다. 예를 들어, 상기 제1 방향과 상기 제3 방향은 빅셀 모듈(2200)의 제1 면(2202)에 수직인 방향일 수 있으나, 이에 한정되지 않는다.
일 실시예에 따르면, 제1 빅셀 유닛과 제2 빅셀 유닛은 이격되어 배치되지 않을 수도 있으나, 제1 간격을 가지고 배치될 수 있다. 또한, 제1 빅셀 유닛과 제2 빅셀 유닛은 인접한 빅셀 유닛일 수 있다. 예를 들어, 제1 빅셀 유닛과 제2 빅셀 유닛은 제1 간격을 가지고 서로 인접하게 배치될 수 있다. 또한 예를 들어, 제1 빅셀 유닛과 제2 빅셀 유닛은 제1 간격을 가지고 서로 이웃하게 배치될 수 있다.
또한, 제1 빅셀 유닛과 제3 빅셀 유닛은 이격되어 배치되지 않을 수도 있으나, 간격을 가지고 배치될 수 있다. 이때, 제1 빅셀 유닛과 제3 빅셀 유닛의 간격은 제1 빅셀 유닛과 제2 빅셀 유닛의 간격인 상기 제1 간격 이하일 수 있다. 또한, 제1 빅셀 유닛과 제3 빅셀 유닛은 인접한 빅셀 유닛일 수 있다. 예를 들어, 제1 빅셀 유닛과 제3 빅셀 유닛은 제1 간격 이하의 간격을 가지고 서로 인접하게 배치될 수 있다. 또한 예를 들어, 제1 빅셀 유닛과 제3 빅셀 유닛은 제1 간격 이하의 간격을 가지고 서로 이웃하게 배치될 수 있다.
다른 일 실시예에 따르면, 상기 제1 빅셀 유닛은 제1 빅셀 어레이의 최외곽 빅셀 유닛일 수 있다. 예를 들어, 상기 제1 빅셀 유닛은 제1 빅셀 어레이의 오른쪽 가장자리에 배치되는 빅셀 유닛일 수 있으나, 이에 한정되지 않는다.
또한, 상기 제3 빅셀 유닛은 제2 빅셀 어레이의 최외곽 빅셀 유닛일 수 있다. 예를 들어, 상기 제3 빅셀 유닛은 제2 빅셀 어레이의 왼쪽 가장자리에 배치되는 빅셀 유닛일 수 있으나, 이에 한정되지 않는다.
이때, 상기 제1 빅셀 유닛과 상기 제3 빅셀 유닛 사이의 간격은 상기 제1 간격 이하일 수 있다. 상기 제1 빅셀 유닛과 상기 제3 빅셀 유닛 사이의 간격이 상기 제1 간격을 초과할 경우, 제1 빅셀 어레이와 제2 빅셀 어레이 사이에 레이저 빔이 조사되지 않는 데드존이 형성될 수 있다. 제1 빅셀 어레이와 제2 빅셀 어레이 사이에 데드존이 형성되지 않도록 하기 위해, 제1 빅셀 유닛과 제3 빅셀 유닛의 간격이 조절될 수 있다.
제1 빅셀 유닛과 제3 빅셀 유닛의 간격은 제1 빅셀 유닛의 스티어링 각도, 제3 빅셀 유닛의 스티어링 각도 및 레이저 빔의 다이버전스(divergence) 각도에 기초하여 정의될 수 있다.
예를 들어, 제1 빅셀 유닛과 제3 빅셀 유닛의 스티어링 각도가 상기 제1 면(2202)과 수직인 경우, 제1 빅셀 유닛과 제3 빅셀 유닛 사이의 간격은 제1 간격이 될 수 있으나, 이에 한정되지 않는다.
도 37에 도시된 바와 같이, 제1 빅셀 어레이(2210)는 제1 수평 FOV(2211)를 형성할 수 있다. 또한, 제2 빅셀 어레이(2220)는 제2 수평 FOV(2221)를 형성할 수 있다.
상기 제1 수평 FOV(2211) 및 상기 제2 수평 FOV(2221)는 오버랩될 수 있으나, 이에 한정되지 않는다.
도 38에 도시된 바와 같이, 제1 빅셀 어레이(2210)는 제1 수평 FOV(2211)를 형성할 수 있다. 또한, 제2 빅셀 어레이(2220)는 제2 수평 FOV(2221)를 형성할 수 있다.
빅셀 모듈(2200)의 제1 면(2202)은 제1 축(a1)을 기준으로 수평이고, 제2 축(a2)을 기준으로 수직일 수 있다. 제1 축(a1)과 제2 축(a2)은 직교할 수 있다.
상기 제1 수평 FOV(2211) 및 상기 제2 수평 FOV(2221)는 제2 축(a2)을 기준으로 서로 대칭일 수 있으나, 이에 한정되지 않는다. 또한, 상기 제1 수평 FOV(2211) 및 상기 제2 수평 FOV(2221)는 빅셀 모듈(2200)의 제1 면(2202)과 수직인 면을 기준으로 서로 대칭일 수 있으나, 이에 한정되지 않는다.
일 실시예에 따르면, 제2 빅셀 어레이(2220)는 제1 빅셀 어레이(2210)를 180도 회전한 것일 수 있다. 이는 제조 과정에서, 동일한 빅셀 어레이를 복수 개 제조한 후, 빅셀 모듈(2200)에 배치할 때, 동일한 빅셀 어레이들 중 하나를 배치하고, 동일한 빅셀 어레이들 중 다른 하나를 상기 배치된 빅셀 어레이를 기준으로 180도 회전을 시킨 후 빅셀 모듈에 배치할 수 있다.
이와 같이, 동일한 빅셀 어레이를 180도 회전하여 배치하는 것은 제조 과정의 간편함을 줄 뿐만 아니라, 빅셀 어레이들의 스티어링 범위가 대칭됨으로써 스티어링의 효율성을 증대시킬 수 있다.
원하는 빅셀 모듈의 수평 FOV가 2N도일 때, 레이저 출력부에 포함된 옵틱에 의해서는 2N도를 충족시키지 못할 수 있다. 예를 들어, 원하는 빅셀 모듈의 수평 FOV가 60도일 때, 레이저 출력부에 포함된 옵틱 중 일 예인 마이크로 프리즘의 경우, 60도의 스티어링 각도를 만들기 위해서는 다양한 각도를 갖는 마이크로 프리즘이 포함되어야 한다. 그러나, 현실적으로 마이크로 프리즘의 각도를 특정 각도 이하로 구현하는 데에 문제가 있을 수 있다. 마이크로 프리즘의 각도가 예시로 특정 각도 이하인 경우, 스티어링 효율이 급격히 감소될 수 있다. 예를 들어, 마이크로 프리즘의 각도가 0.25도 이하인 경우, 구현의 어려움과 스티어링 효율의 감소가 발생할 수 있으나, 이에 한정되지 않는다.
위와 같은 문제를 해결하기 위해, 복수 개의 빅셀 어레이를 사용할 수 있다. 예를 들어, 원하는 빅셀 모듈의 수평 FOV가 2N도일 때, N도의 수평 FOV를 갖는 복수 개의 빅셀 어레이를 사용할 수 있다.
예를 들어, 원하는 빅셀 모듈의 수평 FOV가 60도일 때, 레이저 출력부는 수평 FOV가 30도인 빅셀 어레이 2개를 포함할 수 있다. 이때, 복수 개의 빅셀 어레이 중 하나는 -30도에서 0도의 FOV를 커버하고, 복수 개의 빅셀 어레이 중 다른 하나는 0도에서 +30도의 FOV를 커버하여, 결과적으로 레이저 출력부의 수평 FOV는 60도로 형성될 수 있다. 레이저 출력부의 수평 FOV는 빅셀 모듈의 수평 FOV일 수 있으므로, 결과적으로 빅셀 모듈의 수평 FOV는 60도로 형성될 수 있다.
도 39에 도시된 바와 같이, 제1 빅셀 어레이(2210)는 제1 수직 FOV(2212)를 형성할 수 있다. 또한, 제2 빅셀 어레이(2220)는 제2 수직 FOV(2222)를 형성할 수 있다.
제1 수직 FOV(2212) 및 제2 수직 FOV(2222)는 동일한 조사 각도를 가질 수 있다. 예를 들어, 제1 수직 FOV(2112) 및 제2 수직 FOV(2122)는 30도의 조사 각도를 가질 수 있으나, 이에 한정되지 않는다.
또한, 제1 수직 FOV(2112) 및 제2 수직 FOV(2122)는 오버랩될 수 있으나, 이에 한정되지 않는다.
도 36 내지 도 39에 도시된 빅셀 모듈(2200)의 수평 FOV에 대한 설명은 위의 도 30 내지 도 34를 통해 설명된 빅셀 모듈(2100)의 수평 FOV에 대한 설명과 공통될 수 있다.
도 40은 다른 일 실시예에 따른 라이다 장치를 나타내는 도면이다.
도 40을 참조하면, 일 실시예에 따른 라이다 장치(2002)는 복수 개의 빅셀 모듈(2200)을 포함할 수 있다.
일 실시예에 따른 라이다 장치(2002)는 복수 개의 빅셀 모듈(2200)이 인접하게 배치된 형태일 수도 있고, 이격되어 배치된 형태일 수도 있다. 예를 들어, 상기 라이다 장치(2002)가 복수 개의 빅셀 모듈(2200)이 인접하게 배치되는 형태인 경우, 인접한 빅셀 모듈(2200)은 서로 한 면을 공유할 수 있다.
또한, 일 실시예에 따른 라이다 장치(2002)는 인접하는 빅셀 모듈(2200)들의 레이저 출력부(2230)가 배치되는 제1 면(2202)이 각도를 형성하도록 배치되거나 곡면을 이루도록 배치할 수도 있고, 각도를 형성하지 않거나 직선을 이루도록 배치할 수도 있다.
또한, 일 실시예에 따른 라이다 장치(2002), 빅셀 모듈(2200)의 수평 FOV가 N°인 경우, 사용자가 원하는 라이다 장치 전체의 수평 FOV인 M°를 만족시키기 위해 M/N개의 빅셀 모듈(2200)을 포함할 수 있다.
예를 들어, 빅셀 모듈(2200)의 수평 FOV가 60°인 경우, 사용자가 원하는 라이다 장치 전체의 수평 FOV인 180°를 만족시키기 위해 3개의 빅셀 모듈(2200)을 포함할 수 있다. 이때, 빅셀 모듈의 수평 FOV 60도는 복수 개의 빅셀 어레이에 의해 형성될 수 있다. 예를 들어, 30도의 수평 FOV를 갖는 2개의 빅셀 어레이에 의해 빅셀 모듈의 수평 FOV 60도가 형성될 수 있다. 이때, 라이다 장치는 30도의 수평 FOV를 갖는 2개의 빅셀 어레이를 포함하는 60도의 수평 FOV를 갖는 3개의 빅셀 모듈을 포함할 수 있다.
이하에서는 라이다 장치의 거리 측정을 위한 기준점에 대해 상세히 설명한다.
라이다 장치는 복수 개의 빅셀 모듈을 포함할 수 있다. 라이다 장치는 복수 개의 빅셀 모듈을 통해 대상체로 레이저 빔을 출력할 수 있다. 라이다 장치는 복수 개의 빅셀 모듈을 통해 대상체로부터 반사되는 레이저 빔을 수광할 수 있다. 라이다 장치는 복수 개의 빅셀 모듈을 통해 FOV를 형성할 수 있다.
라이다 장치가 복수 개의 빅셀 모듈을 포함하는 경우, 상기 라이다 장치로부터 대상체까지의 거리를 측정하는 기준점이 다양해질 수 있다. 예를 들어, 복수 개의 빅셀 모듈 마다 각각의 기준점이 존재할 수 있고, 각각의 기준점들의 위치가 모두 상이할 수 있다. 기준점이 다양할 경우, 라이다 장치로부터 대상체까지의 거리를 파악함에 있어서, 동일한 거리라도 빅셀 모듈의 위치에 따라 산출되는 거리가 다양할 수 있다.
위와 같은 문제점을 해결하기 위해, 라이다 장치가 복수 개의 빅셀 모듈을 포함하는 경우, 거리 산출의 기준이 되는 고정된 기준점을 정하여 상기 기준점에 의해 거리를 산출할 수 있다.
또한, 라이다 장치의 빅셀 모듈에는 복수 개의 빅셀 어레이가 포함될 수 있다. 빅셀 모듈은 복수 개의 빅셀 어레이를 통해 대상체로 레이저 빔을 출력할 수 있다. 빅셀 모듈은 복수 개의 빅셀 어레이에서 출력된 레이저 빔이 대상체로부터 반사되는 레이저 빔을 수광할 수 있다. 빅셀 모듈은 복수 개의 빅셀 어레이를 통해 FOV를 형성할 수 있다.
빅셀 모듈이 복수 개의 빅셀 어레이를 포함하는 경우, 상기 라이다 장치로부터 대상체까지의 거리를 측정하는 기준점이 다양해질 수 있다. 예를 들어, 복수 개의 빅셀 어레이 마다 각각의 기준점이 존재할 수 있고, 각각의 기준점들의 위치가 모두 상이할 수 있다. 기준점이 다양할 경우, 라이다 장치로부터 대상체까지의 거리를 파악함에 있어서, 동일한 거리라도 빅셀 어레이의 위치에 따라 산출되는 거리가 다양할 수 있다.
위에서 설명한 바와 같이, 복수 개의 빅셀 어레이 마다 각각의 기준점이 존재할 수 있고, 각각의 기준점들의 위치가 모두 상이할 수 있는 문제점은, 복수 개의 빅셀 유닛에도 해당될 수 있다. 복수 개의 빅셀 유닛 마다 각각의 기준점이 존재할 수 있고, 각각의 기준점들의 위치가 모두 상이할 수 있다. 기준점이 다양할 경우, 라이다 장치로부터 대상체까지의 거리를 파악함에 있어서, 동일한 거리라도 빅셀 유닛의 위치에 따라 산출되는 거리가 다양할 수 있다.
위와 같은 문제점을 해결하기 위해, 빅셀 모듈이 복수 개의 빅셀 어레이를 포함하는 경우, 거리 산출의 기준이 되는 고정된 기준점을 정하여 상기 기준점에 의해 거리를 산출할 수 있다. 또는 빅셀 어레이가 복수 개의 빅셀 유닛을 포함하는 경우, 거리 산출의 기준이 되는 고정된 기준점을 정하여 상기 기준점에 의해 거리를 산출할 수 있다.
도 41 내지 도 42는 일 실시예에 따른 레이저 출력부를 나타내는 도면이다.
도 41을 참조하면, 일 실시예에 따른 레이저 출력부(2900)는 복수 개의 빅셀 어레이를 포함할 수 있다. 예를 들어, 제1 빅셀 어레이 및 제2 빅셀 어레이를 포함할 수 있다.
제1 빅셀 어레이는 복수 개의 빅셀 유닛을 포함할 수 있다. 예를 들어, 제1 빅셀 어레이는 제1 빅셀 유닛(2901) 및 제2 빅셀 유닛(2902)을 포함할 수 있다.
제2 빅셀 어레이는 복수 개의 빅셀 유닛을 포함할 수 있다. 예를 들어, 제2 빅셀 어레이는 제3 빅셀 유닛(2903) 및 제4 빅셀 유닛(2904)을 포함할 수 있다.
제1 빅셀 어레이와 제2 빅셀 어레이는 동일한 기질(substrate)에 놓여 있는 것일 수 있다. 제1 빅셀 어레이와 제2 빅셀 어레이는 동일한 PCB 위에 높여 있는 것일 수 있다.
제1 빅셀 어레이와 제2 빅셀 어레이는 동일한 것일 수 있다. 또는 제2 빅셀 어레이는 제1 빅셀 어레이를 180도 회전시킨 것일 수 있다.
제1 빅셀 유닛(2901)은 제1 방향으로 레이저 빔을 출력할 수 있다. 또한, 제1 빅셀 유닛(2901)은 제1 각도의 다이버전스 각도를 가지는 레이저 빔을 출력할 수 있다.
제2 빅셀 유닛(2902)은 제2 방향으로 레이저 빔을 출력할 수 있다. 또한, 제1 빅셀 유닛(2901)은 제2 각도의 다이버전스 각도를 가지는 레이저 빔을 출력할 수 있다.
제3 빅셀 유닛(2903)은 제3 방향으로 레이저 빔을 출력할 수 있다. 또한, 제3 빅셀 유닛(2903)은 제3 각도의 다이버전스 각도를 가지는 레이저 빔을 출력할 수 있다.
제4 빅셀 유닛(2904)은 제4 방향으로 레이저 빔을 출력할 수 있다. 또한, 제4 빅셀 유닛(2904)은 제4 각도의 다이버전스 각도를 가지는 레이저 빔을 출력할 수 있다.
도 41을 참조하면, 각각의 빅셀 유닛에서 출력되는 레이저 빔의 중심은 실선으로, 다이버전스 빔은 점선으로 나타낼 수 있다.
제1 빅셀 유닛(2901)으로부터 출력되는 레이저 빔의 중심과 제2 빅셀 유닛(2902)으로부터 출력되는 레이저 빔의 중심이 이루는 각도는 상기 제1 각도의 절반과 상기 제2 각도의 절반의 합보다 이하일 수 있다. 또는 제1 빅셀 유닛(2901)으로부터 출력되는 레이저 빔의 중심과 제2 빅셀 유닛(2902)으로부터 출력되는 레이저 빔의 중심이 이루는 각도는 상기 제1 각도와 상기 제2 각도의 합의 절반 이하가 될 수 있다.
제1 빅셀 유닛(2901)으로부터 출력되는 레이저 빔의 중심과 제2 빅셀 유닛(2902)으로부터 출력되는 레이저 빔의 중심이 이루는 각도가 상기 제1 각도와 상기 제2 각도의 합의 절반보다 클 경우, 상기 제1 빅셀 유닛(2901)으로부터 출력되는 레이저 빔과 상기 제2 빅셀 유닛(2902)으로부터 출력되는 레이저 빔 사이에, 레이저 빔이 조사되지 않는 영역인 데드존이 발생할 수 있다.
데드존이 형성되면, 데드존에 존재하는 물체에는 레이저가 조사되지 않기 때문에, 상기 물체의 거리 정보를 얻을 수 없다. 따라서, 데드존을 없애기 위해, 제1 빅셀 유닛(2901)으로부터 출력되는 레이저 빔과 제2 빅셀 유닛(2902)으로부터 출력되는 레이저 빔이 맞닿아 진행되거나, 적어도 일부가 오버랩될 수 있다.
예를 들어, 제1 빅셀 유닛(2901)은 제1 방향으로 콜리메이션 빔을 출력하고, 제2 방향 및 제3 방향으로 다이버전스 빔을 출력할 수 있다. 또한, 제2 빅셀 유닛(2902)은 제4 방향으로 콜리메이션 빔을 출력하고, 상기 제3 방향 및 제5 방향으로 다이버전스 빔을 출력할 수 있다. 또한, 제3 빅셀 유닛(2903)은 제6 방향으로 콜리메이션 빔을 출력하고, 상기 제2 방향 및 제7 방향으로 다이버전스 빔을 출력할 수 있다.
또한 예를 들어, 제1 빅셀 유닛(2901)의 다이버전스 빔과 제3 빅셀 유닛(2903)의 다이버전스 빔은 같은 방향으로 출력될 수 있다. 이때, 제1 빅셀 유닛(2901)의 다이버전스 빔과 제3 빅셀 유닛(2903)의 다이버전스 빔은 레이저 출력부가 배치된 면과 수직인 방향으로 출력될 수 있다.
도 42를 참조하면, 일 실시예에 따른 레이저 출력부(2950)는 복수 개의 빅셀 어레이를 포함할 수 있다. 예를 들어, 제1 빅셀 어레이 및 제2 빅셀 어레이를 포함할 수 있다.
또한, 일 실시예에 따른 레이저 출력부(2950)는 빅셀 어레이로부터 출력되는 레이저 빔을 스티어링 시키는 옵틱을 포함할 수 있다.
제1 빅셀 어레이는 복수 개의 빅셀 유닛을 포함할 수 있다. 예를 들어, 제1 빅셀 어레이는 제1 빅셀 유닛(2951) 및 제2 빅셀 유닛(2952)을 포함할 수 있다.
제2 빅셀 어레이는 복수 개의 빅셀 유닛을 포함할 수 있다. 예를 들어, 제2 빅셀 어레이는 제3 빅셀 유닛(2953) 및 제4 빅셀 유닛(2954)을 포함할 수 있다.
옵틱은 복수 개의 서브 옵틱을 포함할 수 있다. 예를 들어, 제1 빅셀 유닛(2951)으로부터 출력된 레이저 빔을 스티어링 시키는 제1 서브 옵틱(2961)을 포함할 수 있다. 또한 예를 들어, 제2 빅셀 유닛(2952)으로부터 출력된 레이저 빔을 스티어링 시키는 제2 서브 옵틱(2962)을 포함할 수 있다. 또한 예를 들어, 제3 빅셀 유닛(2953)으로부터 출력된 레이저 빔을 스티어링 시키는 제3 서브 옵틱(2963)을 포함할 수 있다. 또한 예를 들어, 제4 빅셀 유닛(2954)으로부터 출력된 레이저 빔을 스티어링 시키는 제4 서브 옵틱(2964)을 포함할 수 있다.
제1 서브 옵틱(2961)은 제1 방향으로 레이저 빔을 출력할 수 있다. 또한, 제1 서브 옵틱(2961)은 제1 각도의 다이버전스 각도를 가지는 레이저 빔을 출력할 수 있다.
제2 서브 옵틱(2962)은 제2 방향으로 레이저 빔을 출력할 수 있다. 또한, 제2 서브 옵틱(2962)은 제2 각도의 다이버전스 각도를 가지는 레이저 빔을 출력할 수 있다.
제3 서브 옵틱(2963)은 제3 방향으로 레이저 빔을 출력할 수 있다. 또한, 제3 서브 옵틱(2963)은 제3 각도의 다이버전스 각도를 가지는 레이저 빔을 출력할 수 있다.
제4 서브 옵틱(2964)은 제4 방향으로 레이저 빔을 출력할 수 있다. 또한, 제4 서브 옵틱(2964)은 제4 각도의 다이버전스 각도를 가지는 레이저 빔을 출력할 수 있다.
도 42를 참조하면, 각각의 빅셀 유닛에서 출력되는 레이저 빔의 중심은 실선으로, 다이버전스 빔은 점선으로 나타낼 수 있다.
제1 빅셀 유닛(2901)으로부터 출력되어 제1 서브 옵틱(2961)을 거쳐 출력되는 레이저 빔의 중심과 제2 빅셀 유닛(2902)으로부터 출력되어 제2 서브 옵틱(2962)을 거쳐 출력되는 레이저 빔의 중심이 이루는 각도는 상기 제1 각도의 절반과 상기 제2 각도의 절반의 합보다 이하일 수 있다. 또는 제1 빅셀 유닛(2901)으로부터 출력되는 레이저 빔의 중심과 제2 빅셀 유닛(2902)으로부터 출력되는 레이저 빔의 중심이 이루는 각도는 상기 제1 각도와 상기 제2 각도의 합의 절반 이하가 될 수 있다.
제1 빅셀 유닛(2901)으로부터 출력되어 제1 서브 옵틱(2961)을 거쳐 출력되는 레이저 빔의 중심과 제2 빅셀 유닛(2902)으로부터 출력되어 제2 서브 옵틱(2962)을 거쳐 출력되는 레이저 빔의 중심이 이루는 각도가 상기 제1 각도와 상기 제2 각도의 합의 절반보다 클 경우, 상기 제1 빅셀 유닛(2901)으로부터 출력되는 레이저 빔과 상기 제2 빅셀 유닛(2902)으로부터 출력되는 레이저 빔 사이에, 레이저 빔이 조사되지 않는 영역인 데드존이 발생할 수 있다.
데드존이 형성되면, 데드존에 존재하는 물체에는 레이저가 조사되지 않기 때문에, 상기 물체의 거리 정보를 얻을 수 없다. 따라서, 데드존을 없애기 위해, 제1 빅셀 유닛(2901)으로부터 출력되는 레이저 빔과 제2 빅셀 유닛(2902)으로부터 출력되는 레이저 빔이 맞닿아 진행되거나, 적어도 일부가 오버랩될 수 있다.
예를 들어, 제1 서브 옵틱(2961)은 제1 방향으로 콜리메이션 빔을 출력하고, 제2 방향 및 제3 방향으로 다이버전스 빔을 출력할 수 있다. 또한, 제2 서브 옵틱(2962)은 제4 방향으로 콜리메이션 빔을 출력하고, 상기 제3 방향 및 제5 방향으로 다이버전스 빔을 출력할 수 있다. 또한, 제3 서브 옵틱(2963)은 제6 방향으로 콜리메이션 빔을 출력하고, 상기 제2 방향 및 제7 방향으로 다이버전스 빔을 출력할 수 있다.
또한 예를 들어, 제1 서브 옵틱(2961)의 다이버전스 빔과 제3 서브 옵틱(2963)의 다이버전스 빔은 같은 방향으로 출력될 수 있다. 이때, 제1 서브 옵틱(2961)의 다이버전스 빔과 제3 서브 옵틱(2963)의 다이버전스 빔은 레이저 출력부가 배치된 면과 수직인 방향으로 출력될 수 있다.
도 43은 일 실시예에 따른 빅셀 모듈간의 거리 측정 기준점을 나타내는 도면이다.
도 43은 빅셀 모듈에 포함된 빅셀 어레이들이 상하로 배치된 빅셀 모듈을 도시하고 있으나, 이에 한정되지 않는다.
도 43을 참조하면, 일 실시예에 따른 라이다 장치(2003)는 복수 개의 빅셀 모듈(2350, 2360)을 포함할 수 있다. 라이다 장치(2003)는 제1 빅셀 모듈(2350) 및 제2 빅셀 모듈(2360)을 포함할 수 있다.
제1 빅셀 모듈(2350)은 바디(2301), 제1 면(2302) 및 제1 빅셀 어레이(2310)를 포함할 수 있다. 제1 빅셀 어레이(2310)는 바디(2301)의 제1 면(2302)에 배치될 수 있다.
제2 빅셀 모듈(2360)은 바디(2361), 제2 면(2362) 제2 빅셀 어레이(2320)를 포함할 수 있다. 제2 빅셀 어레이(2320)는 바디(2361)의 제2 면(2362)에 배치될 수 있다.
일 실시예에 따르면, 제1 빅셀 모듈(2350)의 제1 빅셀 어레이(2310)가 배치되는 제1 면(2302)과 수직하고, 제1 빅셀 어레이(2310)가 레이저 빔을 출력하는 방향의 후방으로 연장되는 제1 가상선(L1)이 존재할 수 있다.
일 실시예에 따르면, 상기 제1 가상선(L1)은 제1 빅셀 어레이(2310)의 제1 지점에서 연장되는 가상선일 수 있다. 예를 들어, 상기 제1 지점은 제1 빅셀 어레이(2310)의 중앙지점일 수 있으나 이에 한정되지 않는다. 또한 예를 들어, 상기 제1 지점은 제1 빅셀 어레이(2310)의 일지점, 예를 들어 중앙 지점을 기준으로 x축 및 y축에 대하여 일정한 좌표를 갖는 지점일 수 있다. 예를 들어, 상기 제1 지점은 제1 빅셀 어레이(2310)의 중앙 지점을 기준으로 x축 및 y축에 대하여 (a,b)의 좌표를 갖는 지점일 수 있다.
또한 일 실시예에 따르면, 제2 빅셀 모듈(2360)의 제2 빅셀 어레이(2320)가 배치되는 제2 면(2362)과 수직하고, 제2 빅셀 어레이(2320)가 레이저 빔을 출력하는 방향의 후방으로 연장되는 제2 가상선(L2)이 존재할 수 있다.
상기 제2 가상선(L2)은 제2 빅셀 어레이(2320)의 제2 지점에서 연장되는 가상선일 수 있다. 예를 들어, 상기 제2 지점은 제2 빅셀 어레이(2320)의 중앙지점일 수 있다. 또한 예를 들어, 상기 제2 지점은 제1 빅셀 어레이(2320)의 일지점, 예를 들어 중앙 지점을 기준으로 x축 및 y축에 대하여 일정한 좌표를 갖는 지점일 수 있다. 예를 들어, 상기 제2 지점은 제2 빅셀 어레이(2320)의 중앙 지점을 기준으로 x축 및 y축에 대하여 (c,d)의 좌표를 갖는 지점일 수 있다.
상기 제1 지점 및 상기 제2 지점이 각 빅셀 어레이의 중앙 지점을 기준으로 좌표를 갖는 경우, 상기 제1 지점의 좌표와 상기 제2 지점의 좌표는 동일할 수 있다. 예를 들어, 상기 제1 지점의 좌표인 (a,b)와 상기 제2 지점의 좌표인 (c,d)에 있어서, a와 c가 동일하고, b와 d가 동일할 수 있다.
제1 가상선(L1) 및 제2 가상선(L2)은 교차할 수 있다. 예를 들어, 제1 가상선(L1) 및 제2 가상선(L2)은 교점을 형성할 수 있다. 이때, 제1 가상선(L1) 및 제2 가상선(L2)의 교점은 기준점(P)이 될 수 있다.
상기 기준점(P)은 제1 빅셀 모듈(2350) 및 제2 빅셀 모듈(2360)이 공유하는 면에 포함될 수 있다. 또한, 상기 기준점(P)은 제1 빅셀 모듈(2350) 및 제2 빅셀 모듈(2360)이 공유하는 모서리에 포함될 수 있다. 또한, 상기 기준점(P)은 제1 빅셀 모듈(2350) 및 제2 빅셀 모듈(2360)이 만나는 교점이 될 수 있다.
상기 기준점(P)은 라이다 장치의 컨트롤러에 미리 저장될 수 있다.
또한 예를 들어, 상기 기준점(P)과 제1 빅셀 어레이(2310) 사이에는 최소거리(R)가 정해질 수 있다. 또한 예를 들어, 상기 기준점(P)과 제2 빅셀 어레이(2320) 사이에는 최소거리가 정해질 수 있다.
이때, 상기 기준점(P)과 제1 빅셀 어레이(2310) 사이의 최소거리(R)는 상기 기준점(P)과 제2 빅셀 어레이(2320) 사이의 최소거리와 동일할 수 있다.
이때, 상기 기준점(P)과 제1 빅셀 어레이(2310) 사이의 최소거리(R)는 상기 기준점(P)과 제1 면(2302) 사이의 최소거리일 수 있다.
이때, 상기 기준점(P)과 제2 빅셀 어레이(2320) 사이의 최소거리(R)는 상기 기준점(P)과 제2 면(2362) 사이의 최소거리일 수 있다.
또한 예를 들어, 상기 기준점(P)과 제1 빅셀 어레이(2310) 사이의 최소거리(R)는 상기 기준점(P)과 제2 빅셀 어레이(2320) 사이의 최소거리와 다를 수도 있다.
도 44는 다른 일 실시예에 따른 빅셀 모듈간의 거리 측정 기준점을 나타내는 도면이다.
도 44는 빅셀 모듈에 포함된 빅셀 어레이들이 좌우로 배치된 빅셀 모듈을 도시하고 있으나, 이에 한정되지 않는다.
도 44를 참조하면, 일 실시예에 따른 라이다 장치(2004)는 복수 개의 빅셀 모듈(2450, 2460)을 포함할 수 있다. 라이다 장치(2004)는 제1 빅셀 모듈(2450) 및 제2 빅셀 모듈(2460)을 포함할 수 있다.
제1 빅셀 모듈(2450)은 바디(2401), 제1 면(2402) 및 제1 빅셀 어레이(2410)를 포함할 수 있다. 제1 빅셀 어레이(2410)는 바디(2401)의 제1 면(2402)에 배치될 수 있다.
제2 빅셀 모듈(2460)은 바디(2461), 제2 면(2462) 제2 빅셀 어레이(2420)를 포함할 수 있다. 제2 빅셀 어레이(2420)는 바디(2461)의 제2 면(2462)에 배치될 수 있다.
일 실시예에 따르면, 제1 빅셀 모듈(2450)의 제1 빅셀 어레이(2410)가 배치되는 제1 면(2402)과 수직하고, 제1 빅셀 어레이(2410)가 레이저 빔을 출력하는 방향의 후방으로 연장되는 제1 가상선(L1)이 존재할 수 있다.
일 실시예에 따르면, 상기 제1 가상선(L1)은 제1 빅셀 어레이(2310)의 제1 지점에서 연장되는 가상선일 수 있다. 예를 들어, 상기 제1 지점은 제1 빅셀 어레이(2310)의 중앙지점일 수 있으나 이에 한정되지 않는다. 또한 예를 들어, 상기 제1 지점은 제1 빅셀 어레이(2310)의 일지점, 예를 들어 중앙 지점을 기준으로 x축 및 y축에 대하여 일정한 좌표를 갖는 지점일 수 있다. 예를 들어, 상기 제1 지점은 제1 빅셀 어레이(2310)의 중앙 지점을 기준으로 x축 및 y축에 대하여 (a,b)의 좌표를 갖는 지점일 수 있다.
또한 일 실시예에 따르면, 제2 빅셀 모듈(2450)의 제2 빅셀 어레이(2420)가 배치되는 제2 면(2462)과 수직하고, 제2 빅셀 어레이(2420)가 레이저 빔을 출력하는 방향의 후방으로 연장되는 제2 가상선(L2)이 존재할 수 있다.
상기 제2 가상선(L2)은 제2 빅셀 어레이(2320)의 제2 지점에서 연장되는 가상선일 수 있다. 예를 들어, 상기 제2 지점은 제2 빅셀 어레이(2320)의 중앙지점일 수 있다. 또한 예를 들어, 상기 제2 지점은 제1 빅셀 어레이(2320)의 일지점, 예를 들어 중앙 지점을 기준으로 x축 및 y축에 대하여 일정한 좌표를 갖는 지점일 수 있다. 예를 들어, 상기 제2 지점은 제2 빅셀 어레이(2320)의 중앙 지점을 기준으로 x축 및 y축에 대하여 (c,d)의 좌표를 갖는 지점일 수 있다.
상기 제1 지점 및 상기 제2 지점이 각 빅셀 어레이의 중앙 지점을 기준으로 좌표를 갖는 경우, 상기 제1 지점의 좌표와 상기 제2 지점의 좌표는 동일할 수 있다. 예를 들어, 상기 제1 지점의 좌표인 (a,b)와 상기 제2 지점의 좌표인 (c,d)에 있어서, a와 c가 동일하고, b와 d가 동일할 수 있다.
제1 가상선(L1) 및 제2 가상선(L2)은 교차할 수 있다. 예를 들어, 제1 가상선(L1) 및 제2 가상선(L2)은 교점을 형성할 수 있다. 이때, 제1 가상선(L1) 및 제2 가상선(L2)의 교점은 기준점(P)이 될 수 있다.
상기 기준점(P)은 제1 빅셀 모듈(2450) 및 제2 빅셀 모듈(2460)이 공유하는 면에 포함될 수 있다. 또한, 상기 기준점(P)은 제1 빅셀 모듈(2450) 및 제2 빅셀 모듈(2460)이 공유하는 모서리에 포함될 수 있다. 또한, 상기 기준점(P)은 제1 빅셀 모듈(2450) 및 제2 빅셀 모듈(2460)이 만나는 교점이 될 수 있다.
또한 예를 들어, 상기 기준점(P)과 제1 빅셀 어레이(2410) 사이에는 최소거리(R)가 정해질 수 있다. 또한 예를 들어, 상기 기준점(P)과 제1 빅셀 어레이(2410) 사이에는 최소거리가 정해질 수 있다.
이때, 상기 기준점(P)과 제1 빅셀 어레이(2410) 사이의 최소거리(R)는 상기 기준점(P)과 제1 빅셀 어레이(2410) 사이의 최소거리와 동일할 수 있다.
이때, 상기 기준점(P)과 제1 빅셀 어레이(2410) 사이의 최소거리(R)는 상기 기준점(P)과 제1 면(2402) 사이의 최소거리일 수 있다.
이때, 상기 기준점(P)과 제2 빅셀 어레이(2420) 사이의 최소거리(R)는 상기 기준점(P)과 제2 면(2462) 사이의 최소거리일 수 있다.
도 45 내지 도 47는 또 다른 일 실시예에 따른 빅셀 모듈간의 거리 측정 기준점을 나타내는 도면이다.
도 45 내지 도 47는 빅셀 모듈에 포함된 빅셀 어레이들이 상하로 배치된 빅셀 모듈을 도시하고 있으나, 이에 한정되지 않는다.
도 45 내지 도 47를 참조하면, 일 실시예에 따른 라이다 장치(2003)는 복수 개의 빅셀 모듈(2350, 2360, 2370)을 포함할 수 있다. 라이다 장치(2003)는 제1 빅셀 모듈(2350), 제2 빅셀 모듈(2360) 및 제3 빅셀 모듈(2370)을 포함할 수 있다.
제1 빅셀 모듈(2350)은 바디(2301), 제1 면(2302) 및 제1 빅셀 어레이(2310)를 포함할 수 있다. 제1 빅셀 어레이(2310)는 바디(2301)의 제1 면(2302)에 배치될 수 있다.
제2 빅셀 모듈(2360)은 바디(2361), 제2 면(2362) 제2 빅셀 어레이(2320)를 포함할 수 있다. 제2 빅셀 어레이(2320)는 바디(2361)의 제2 면(2362)에 배치될 수 있다.
제3 빅셀 모듈(2370)은 바디(2371), 제3 면(2372) 제3 빅셀 어레이(2330)를 포함할 수 있다. 제3 빅셀 어레이(2330)는 바디(2371)의 제3 면(2372)에 배치될 수 있다.
일 실시예에 따르면, 제1 빅셀 모듈(2350)의 제1 빅셀 어레이(2310)가 배치되는 제1 면(2302)과 수직하고, 제1 빅셀 어레이(2310)가 레이저 빔을 출력하는 방향의 후방으로 연장되는 제1 가상선(L1)이 존재할 수 있다.
상기 제1 가상선(L1)은 제1 빅셀 어레이(2310)의 제1 지점에서 연장되는 가상선일 수 있다. 예를 들어, 상기 제1 지점은 제1 빅셀 어레이(2310)의 중앙지점일 수 있으나 이에 한정되지 않는다. 또한 예를 들어, 상기 제1 지점은 제1 빅셀 어레이(2310)의 일지점, 예를 들어 중앙 지점을 기준으로 x축 및 y축에 대하여 일정한 좌표를 갖는 지점일 수 있다. 예를 들어, 상기 제1 지점은 제1 빅셀 어레이(2310)의 중앙 지점을 기준으로 x축 및 y축에 대하여 (a,b)의 좌표를 갖는 지점일 수 있다.
또한 일 실시예에 따르면, 제2 빅셀 모듈(2360)의 제2 빅셀 어레이(2320)가 배치되는 제2 면(2362)과 수직하고, 제2 빅셀 어레이(2320)가 레이저 빔을 출력하는 방향의 후방으로 연장되는 제2 가상선(L2)이 존재할 수 있다.
상기 제2 가상선(L2)은 제2 빅셀 어레이(2320)의 제2 지점에서 연장되는 가상선일 수 있다. 예를 들어, 상기 제2 지점은 제2 빅셀 어레이(2320)의 중앙지점일 수 있다. 또한 예를 들어, 상기 제2 지점은 제1 빅셀 어레이(2320)의 일지점, 예를 들어 중앙 지점을 기준으로 x축 및 y축에 대하여 일정한 좌표를 갖는 지점일 수 있다. 예를 들어, 상기 제2 지점은 제2 빅셀 어레이(2320)의 중앙 지점을 기준으로 x축 및 y축에 대하여 (c,d)의 좌표를 갖는 지점일 수 있다.
또한 일 실시예에 따르면, 제3 빅셀 모듈(2370)의 제3 빅셀 어레이(2330)가 배치되는 제3 면(2372)과 수직하고, 제3 빅셀 어레이(2330)가 레이저 빔을 출력하는 방향의 후방으로 연장되는 제3 가상선(L3)이 존재할 수 있다.
상기 제3 가상선(L3)은 제3 빅셀 어레이(2330)의 제3 지점에서 연장되는 가상선일 수 있다. 예를 들어, 상기 제3 지점은 제3 빅셀 어레이(2330)의 중앙지점일 수 있다. 또한 예를 들어, 상기 제2 지점은 제1 빅셀 어레이(2330)의 일지점, 예를 들어 중앙 지점을 기준으로 x축 및 y축에 대하여 일정한 좌표를 갖는 지점일 수 있다. 예를 들어, 상기 제3 지점은 제3 빅셀 어레이(2330)의 중앙 지점을 기준으로 x축 및 y축에 대하여 (e,f)의 좌표를 갖는 지점일 수 있다.
상기 제1 지점, 상기 제2 지점 및 상기 제3 지점이 각 빅셀 어레이의 중앙 지점을 기준으로 좌표를 갖는 경우, 상기 제1 지점의 좌표, 상기 제2 지점의 좌표 및 상기 제3 지점의 좌표는 동일할 수 있다. 예를 들어, 상기 제1 지점의 좌표인 (a,b), 상기 제2 지점의 좌표인 (c,d) 및 상기 제3 지점의 좌표인 (e,f)에 있어서, a, c, e가 동일하고, b, d, f가 동일할 수 있다.
도 45을 참조하면, 제1 가상선(L1), 제2 가상선(L2) 및 제3 가상선(L3)은 교차할 수 있다. 예를 들어, 제1 가상선(L1), 제2 가상선(L2) 및 제3 가상선(L3)은 교점을 형성할 수 있다. 이때, 제1 가상선(L1), 제2 가상선(L2) 및 제3 가상선(L3)의 교점은 기준점(P)이 될 수 있다.
상기 기준점(P)은 제1 빅셀 모듈(2350) 및 제2 빅셀 모듈(2360)이 공유하는 면에 포함될 수 있다. 또한, 상기 기준점(P)은 제2 빅셀 모듈(2360) 및 제3 빅셀 모듈(2370)이 공유하는 면에 포함될 수 있다.
또한, 상기 기준점(P)은 제1 빅셀 모듈(2350) 및 제2 빅셀 모듈(2360)이 공유하는 모서리에 포함될 수 있다. 또한, 상기 기준점(P)은 제2 빅셀 모듈(2360) 및 제3 빅셀 모듈(2370)이 공유하는 모서리에 포함될 수 있다. 또한, 상기 기준점(P)은 제1 빅셀 모듈(2350) 및 제3 빅셀 모듈(2370)이 공유하는 모서리에 포함될 수 있다.
또한, 상기 기준점(P)은 제1 빅셀 모듈(2350) 및 제2 빅셀 모듈(2360)이 만나는 교점이 될 수 있다. 또한, 상기 기준점(P)은 제2 빅셀 모듈(2360) 및 제3 빅셀 모듈(2370)이 만나는 교점이 될 수 있다. 또한, 상기 기준점(P)은 제1 빅셀 모듈(2350) 및 제3 빅셀 모듈(2370)이 만나는 교점이 될 수 있다. 또한, 상기 기준점(P)은 제1 빅셀 모듈(2350), 제2 빅셀 모듈(2360) 및 제3 빅셀 모듈(2370)이 만나는 교점이 될 수 있다.
또한 예를 들어, 상기 기준점(P)과 제1 빅셀 어레이(2310) 사이에는 최소거리(R)가 정해질 수 있다. 또한 예를 들어, 상기 기준점(P)과 제2 빅셀 어레이(2320) 사이에는 최소거리가 정해질 수 있다. 또한 예를 들어, 상기 기준점(P)과 제3 빅셀 어레이(2330) 사이에는 최소거리가 정해질 수 있다.
이때, 상기 기준점(P)과 제1 빅셀 어레이(2310) 사이의 최소거리(R)는 상기 기준점(P)과 제2 빅셀 어레이(2320) 사이의 최소거리와 동일할 수 있다. 또한, 상기 기준점(P)과 제1 빅셀 어레이(2310) 사이의 최소거리(R)는 상기 기준점(P)과 제3 빅셀 어레이(2330) 사이의 최소거리와 동일할 수 있다. 또한, 상기 기준점(P)과 제2 빅셀 어레이(2320) 사이의 최소거리(R)는 상기 기준점(P)과 제3 빅셀 어레이(2330) 사이의 최소거리와 동일할 수 있다.
이때, 상기 기준점(P)과 제1 빅셀 어레이(2310) 사이의 최소거리(R)는 상기 기준점(P)과 제1 면(2302) 사이의 최소거리일 수 있다.
이때, 상기 기준점(P)과 제2 빅셀 어레이(2320) 사이의 최소거리(R)는 상기 기준점(P)과 제2 면(2362) 사이의 최소거리일 수 있다.
이때, 상기 기준점(P)과 제3 빅셀 어레이(2330) 사이의 최소거리(R)는 상기 기준점(P)과 제3 면(2372) 사이의 최소거리일 수 있다.
다른 일 실시예에 따르면, 상기 기준점(P)과 제1 빅셀 어레이(2310) 사이의 최소거리(R)는 상기 기준점(P)과 제2 빅셀 어레이(2320) 사이의 최소거리와 동일하지 않을 수도 있다. 또한, 상기 기준점(P)과 제1 빅셀 어레이(2310) 사이의 최소거리(R)는 상기 기준점(P)과 제3 빅셀 어레이(2330) 사이의 최소거리와 동일하지 않을 수도 있다. 또한, 상기 기준점(P)과 제2 빅셀 어레이(2320) 사이의 최소거리(R)는 상기 기준점(P)과 제3 빅셀 어레이(2330) 사이의 최소거리와 동일하지 않을 수도 있다.
제1 가상선(L1), 제2 가상선(L2) 및 제3 가상선(L3)은 교차할 수 있다. 예를 들어, 제1 가상선(L1) 및 제2 가상선(L2)은 교점을 형성할 수 있다. 또한 예를 들어, 제2 가상선(L2) 및 제3 가상선(L3)은 교점을 형성할 수 있다. 또한 예를 들어, 제1 가상선(L1) 및 제3 가상선(L3)은 교점을 형성할 수 있다. 이때, 제1 가상선(L1) 및 제2 가상선(L2)의 교차점(C)이 형성될 수 있다.
일 실시예에 따르면, 제1 가상선(L1), 제2 가상선(L2) 및 제3 가상선(L3)은 한 개의 교차점을 형성할 수도 있고, 여러 개의 교차점을 형성할 수도 있다.
제1 가상선(L1), 제2 가상선(L2) 및 제3 가상선(L3)이 여러 개의 교차점을 형성하는 경우, 여러 개의 교차점 중 어떤 점을 기준점으로 두어야 하는지에 대한 문제가 존재할 수 있다.
복수 개의 가상선들 사이에 여러 개의 교차점이 형성되는 경우, 모든 교차점을 포함할 수 있는 교차 영역을 형성시킬 수 있다. 상기 교차 영역은 구(sphere)의 형태로 형성될 수 있으나, 이에 한정되지 않는다. 상기 교차 영역의 중심을 기준점으로 잡을 수 있다. 따라서, 가상선들의 교차점이 여러 개로 형성되더라도, 상기 교차 영역에 포함된다면, 상기 교차 영역의 원점을 기준점으로 하여 대상체와의 거리를 산출할 수 있다.
도 46를 참조하면, 제1 가상선(L1) 및 제2 가상선(L2)의 교차점은 C이다. 제3 가상선(L3)은 교차점(C)로부터 떨어져있을 수 있다. 이때, 제3 가상선(L3)과 교차점(C)의 최소거리는 D일 수 있다. 이때, 제3 가상선(L3) 및 교차점(C)를 모두 포함하는 구(sphere)가 형성될 수 있다. 상기 구의 직경은 D가 될 수 있다. 이때, 상기 구의 원점(center)을 기준점(P)으로 정할 수 있다.
도 47를 참조하면, 제1 가상선(L1) 및 제2 가상선(L2)의 교차점은 제1 교차점(C1)일 수 있다. 제2 가상선(L2) 및 제3 가상선(L3)의 교차점은 제2 교차점(C2)일 수 있다. 제1 가상선(L1) 및 제3 가상선(L3)의 교차점은 제3 교차점(C3)일 수 있다.
일 실시예에 따르면, 기준점(P)은 제1 교차점(C1), 제2 교차점(C2) 및 제3 교차점(C3)에 기초하여 정해질 수 있다. 또한, 제1 교차점(C1), 제2 교차점(C2) 및 제3 교차점(C3)을 모두 포함하는 구(sphere)가 형성될 수 있다. 상기 구의 직경은 D가 될 수 있다. 이때, 상기 D는 제1 교차점(C1), 제2 교차점(C2) 및 제3 교차점(C3)간의 거리 중 최대인 거리일 수 있다. 이때, 상기 구의 원점(center)을 기준점(P)으로 정할 수 있다.
예를 들어, 제1 교차점(C1) 및 제2 교차점(C2) 사이의 거리를 구할 수 있다. 또한 예를 들어, 제2 교차점(C2) 및 제3 교차점(C3) 사이의 거리를 구할 수 있다. 또한 예를 들어, 제1 교차점(C1) 및 제3 교차점(C3) 사이의 거리를 구할 수 있다.
이때, 제1 교차점(C1) 및 제2 교차점(C2) 사이의 거리, 제2 교차점(C2) 및 제3 교차점(C3) 사이의 거리, 제1 교차점(C1) 및 제3 교차점(C3) 사이의 거리 중 가장 큰 값을 구의 직경 D로 정할 수 있다.
이때, 기준점(P)은 사이의 거리가 가장 큰 교차점 2개의 중간에 위치할 수 있다. 예를 들어, 제1 교차점(C1) 및 제2 교차점(C2) 사이의 거리가 가장 큰 경우, 기준점(P)은 제1 교차점(C1) 및 제2 교차점(C2)의 중앙에 위치하는 점이 될 수 있다.
일 실시예에 따르면, 라이다 장치(2003)는 상기 구의 원점인 기준점(P)을 기준으로 라이다 장치로부터 대상체까지의 거리를 산출할 수 있다.
예를 들어, 라이다 장치(2003)는 제1 빅셀 어레이(2310)로부터 대상체까지의 거리를 산출할 수 있다. 또한 라이다 장치(2003)는 상기 기준점(P)으로부터 제1 빅셀 어레이(2310)까지의 거리를 산출할 수 있다. 이때, 라이다 장치(2003)는 라이다 장치(2003)로부터 대상체까지의 거리를 상기 기준점(P)으로부터 대상체까지의 거리로 정할 수 있다. 상기 기준점(P)으로부터 대상체까지의 거리는 제1 빅셀 어레이(2310)로부터 대상체까지의 거리에서 상기 기준점(P)으로부터 제1 빅셀 어레이(2310)까지의 거리를 합한 값일 수 있다.
또한 예를 들어, 라이다 장치(2003)는 제2 빅셀 어레이(2320)로부터 대상체까지의 거리를 산출할 수 있다. 또한 라이다 장치(2003)는 상기 기준점(P)으로부터 제2 빅셀 어레이(2320)까지의 거리를 산출할 수 있다. 이때, 라이다 장치(2003)는 라이다 장치(2003)로부터 대상체까지의 거리를 상기 기준점(P)으로부터 대상체까지의 거리로 정할 수 있다. 상기 기준점(P)으로부터 대상체까지의 거리는 제2 빅셀 어레이(2320)로부터 대상체까지의 거리에서 상기 기준점(P)으로부터 제2 빅셀 어레이(2320)까지의 거리를 합한 값일 수 있다.
또한 예를 들어, 라이다 장치(2003)는 제3 빅셀 어레이(2330)로부터 대상체까지의 거리를 산출할 수 있다. 또한 라이다 장치(2003)는 상기 기준점(P)으로부터 제3 빅셀 어레이(2330)까지의 거리를 산출할 수 있다. 이때, 라이다 장치(2003)는 라이다 장치(2003)로부터 대상체까지의 거리를 상기 기준점(P)으로부터 대상체까지의 거리로 정할 수 있다. 상기 기준점(P)으로부터 대상체까지의 거리는 제3 빅셀 어레이(2330)로부터 대상체까지의 거리에서 상기 기준점(P)으로부터 제3 빅셀 어레이(2330)까지의 거리를 합한 값일 수 있다.
위의 실시 예는 빅셀 모듈이 3개인 경우를 기준으로 설명되었으나, 빅셀 모듈이 4개인 경우, 5개인 경우 등에도 적용될 수 있다.
도 48 내지 도 50은 또 다른 일 실시예에 따른 빅셀 모듈간의 거리 측정 기준점을 나타내는 도면이다.
도 48 내지 도 50은 빅셀 모듈에 포함된 빅셀 어레이들이 상하로 배치된 빅셀 모듈을 도시하고 있으나, 이에 한정되지 않는다.
도 48 내지 도 50을 참조하면, 일 실시예에 따른 라이다 장치(2004)는 복수 개의 빅셀 모듈(2450, 2460, 2470)을 포함할 수 있다. 라이다 장치(2004)는 제1 빅셀 모듈(2450), 제2 빅셀 모듈(2460) 및 제3 빅셀 모듈(2470)을 포함할 수 있다.
제1 빅셀 모듈(2450)은 바디(2401), 제1 면(2402) 및 제1 빅셀 어레이(2410)를 포함할 수 있다. 제1 빅셀 어레이(2410)는 바디(2401)의 제1 면(2402)에 배치될 수 있다.
제2 빅셀 모듈(2460)은 바디(2461), 제2 면(2462) 제2 빅셀 어레이(2420)를 포함할 수 있다. 제2 빅셀 어레이(2420)는 바디(2461)의 제2 면(2462)에 배치될 수 있다.
제3 빅셀 모듈(2470)은 바디(2471), 제3 면(2472) 제3 빅셀 어레이(2430)를 포함할 수 있다. 제3 빅셀 어레이(2430)는 바디(2471)의 제3 면(2472)에 배치될 수 있다.
일 실시예에 따르면, 제1 빅셀 모듈(2450)의 제1 빅셀 어레이(2410)가 배치되는 제1 면(2402)과 수직하고, 제1 빅셀 어레이(2410)가 레이저 빔을 출력하는 방향의 후방으로 연장되는 제1 가상선(L1)이 존재할 수 있다.
또한 일 실시예에 따르면, 제2 빅셀 모듈(2460)의 제2 빅셀 어레이(2420)가 배치되는 제2 면(2462)과 수직하고, 제2 빅셀 어레이(2420)가 레이저 빔을 출력하는 방향의 후방으로 연장되는 제2 가상선(L2)이 존재할 수 있다.
또한 일 실시예에 따르면, 제3 빅셀 모듈(2470)의 제3 빅셀 어레이(2430)가 배치되는 제3 면(2472)과 수직하고, 제3 빅셀 어레이(2430)가 레이저 빔을 출력하는 방향의 후방으로 연장되는 제3 가상선(L3)이 존재할 수 있다.
도 48을 참조하면, 제1 가상선(L1), 제2 가상선(L2) 및 제3 가상선(L3)은 교차할 수 있다. 예를 들어, 제1 가상선(L1), 제2 가상선(L2) 및 제3 가상선(L3)은 교점을 형성할 수 있다. 이때, 제1 가상선(L1), 제2 가상선(L2) 및 제3 가상선(L3)의 교점은 기준점(P)이 될 수 있다.
상기 기준점(P)은 제1 빅셀 모듈(2450) 및 제2 빅셀 모듈(2460)이 공유하는 면에 포함될 수 있다. 또한, 상기 기준점(P)은 제2 빅셀 모듈(2460) 및 제3 빅셀 모듈(2470)이 공유하는 면에 포함될 수 있다.
또한, 상기 기준점(P)은 제1 빅셀 모듈(2450) 및 제2 빅셀 모듈(2460)이 공유하는 모서리에 포함될 수 있다. 또한, 상기 기준점(P)은 제2 빅셀 모듈(2460) 및 제3 빅셀 모듈(2470)이 공유하는 모서리에 포함될 수 있다. 또한, 상기 기준점(P)은 제1 빅셀 모듈(2450) 및 제3 빅셀 모듈(2470)이 공유하는 모서리에 포함될 수 있다.
또한, 상기 기준점(P)은 제1 빅셀 모듈(2450) 및 제2 빅셀 모듈(2460)이 만나는 교점이 될 수 있다. 또한, 상기 기준점(P)은 제2 빅셀 모듈(2460) 및 제3 빅셀 모듈(2470)이 만나는 교점이 될 수 있다. 또한, 상기 기준점(P)은 제1 빅셀 모듈(2450) 및 제3 빅셀 모듈(2470)이 만나는 교점이 될 수 있다. 또한, 상기 기준점(P)은 제1 빅셀 모듈(2450), 제2 빅셀 모듈(2460) 및 제3 빅셀 모듈(2470)이 만나는 교점이 될 수 있다.
또한 예를 들어, 상기 기준점(P)과 제1 빅셀 어레이(2410) 사이에는 최소거리(R)가 정해질 수 있다. 또한 예를 들어, 상기 기준점(P)과 제2 빅셀 어레이(2420) 사이에는 최소거리가 정해질 수 있다. 또한 예를 들어, 상기 기준점(P)과 제3 빅셀 어레이(2430) 사이에는 최소거리가 정해질 수 있다.
이때, 상기 기준점(P)과 제1 빅셀 어레이(2410) 사이의 최소거리(R)는 상기 기준점(P)과 제2 빅셀 어레이(2420) 사이의 최소거리와 동일할 수 있다. 또한, 상기 기준점(P)과 제1 빅셀 어레이(2410) 사이의 최소거리(R)는 상기 기준점(P)과 제3 빅셀 어레이(2430) 사이의 최소거리와 동일할 수 있다. 또한, 상기 기준점(P)과 제2 빅셀 어레이(2420) 사이의 최소거리(R)는 상기 기준점(P)과 제3 빅셀 어레이(2430) 사이의 최소거리와 동일할 수 있다.
이때, 상기 기준점(P)과 제1 빅셀 어레이(2410) 사이의 최소거리(R)는 상기 기준점(P)과 제1 면(2402) 사이의 최소거리일 수 있다.
이때, 상기 기준점(P)과 제2 빅셀 어레이(2420) 사이의 최소거리(R)는 상기 기준점(P)과 제2 면(2462) 사이의 최소거리일 수 있다.
이때, 상기 기준점(P)과 제3 빅셀 어레이(2430) 사이의 최소거리(R)는 상기 기준점(P)과 제3 면(2472) 사이의 최소거리일 수 있다.
제1 가상선(L1), 제2 가상선(L2) 및 제3 가상선(L3)은 교차할 수 있다. 예를 들어, 제1 가상선(L1) 및 제2 가상선(L2)은 교점을 형성할 수 있다. 또한 예를 들어, 제2 가상선(L2) 및 제3 가상선(L3)은 교점을 형성할 수 있다. 또한 예를 들어, 제1 가상선(L1) 및 제3 가상선(L3)은 교점을 형성할 수 있다. 이때, 제1 가상선(L1) 및 제2 가상선(L2)의 교차점(C)이 형성될 수 있다.
일 실시예에 따르면, 제1 가상선(L1), 제2 가상선(L2) 및 제3 가상선(L3)은 한 개의 교차점을 형성할 수도 있고, 여러 개의 교차점을 형성할 수도 있다.
제1 가상선(L1), 제2 가상선(L2) 및 제3 가상선(L3)이 여러 개의 교차점을 형성하는 경우, 여러 개의 교차점 중 어떤 점을 기준점으로 두어야 하는지에 대한 문제가 존재할 수 있다.
복수 개의 가상선들 사이에 여러 개의 교차점이 형성되는 경우, 모든 교차점을 포함할 수 있는 교차 영역을 형성시킬 수 있다. 상기 교차 영역은 구(sphere)의 형태로 형성될 수 있으나, 이에 한정되지 않는다. 상기 교차 영역의 중심을 기준점으로 잡을 수 있다. 따라서, 가상선들의 교차점이 여러 개로 형성되더라도, 상기 교차 영역에 포함된다면, 상기 교차 영역의 원점을 기준점으로 하여 대상체와의 거리를 산출할 수 있다.
도 49을 참조하면, 제1 가상선(L1) 및 제2 가상선(L2)의 교차점은 C이다. 제3 가상선(L3)은 교차점(C)로부터 떨어져있을 수 있다. 이때, 제3 가상선(L3)과 교차점(C)의 최소거리는 D일 수 있다. 이때, 제3 가상선(L3) 및 교차점(C)를 모두 포함하는 구(sphere)가 형성될 수 있다. 상기 구의 직경은 D가 될 수 있다. 이때, 상기 구의 원점(center)을 기준점(P)으로 정할 수 있다.
도 50를 참조하면, 제1 가상선(L1) 및 제2 가상선(L2)의 교차점은 제1 교차점(C1)일 수 있다. 제2 가상선(L2) 및 제3 가상선(L3)의 교차점은 제2 교차점(C2)일 수 있다. 제1 가상선(L1) 및 제3 가상선(L3)의 교차점은 제3 교차점(C3)일 수 있다.
일 실시예에 따르면, 기준점(P)은 제1 교차점(C1), 제2 교차점(C2) 및 제3 교차점(C3)에 기초하여 정해질 수 있다. 또한, 제1 교차점(C1), 제2 교차점(C2) 및 제3 교차점(C3)을 모두 포함하는 구(sphere)가 형성될 수 있다. 상기 구의 직경은 D가 될 수 있다. 이때, 상기 D는 제1 교차점(C1), 제2 교차점(C2) 및 제3 교차점(C3)간의 거리 중 최대인 거리일 수 있다. 이때, 상기 구의 원점(center)을 기준점(P)으로 정할 수 있다.
예를 들어, 제1 교차점(C1) 및 제2 교차점(C2) 사이의 거리를 구할 수 있다. 또한 예를 들어, 제2 교차점(C2) 및 제3 교차점(C3) 사이의 거리를 구할 수 있다. 또한 예를 들어, 제1 교차점(C1) 및 제3 교차점(C3) 사이의 거리를 구할 수 있다.
이때, 제1 교차점(C1) 및 제2 교차점(C2) 사이의 거리, 제2 교차점(C2) 및 제3 교차점(C3) 사이의 거리, 제1 교차점(C1) 및 제3 교차점(C3) 사이의 거리 중 가장 큰 값을 구의 직경 D로 정할 수 있다.
이때, 기준점(P)은 사이의 거리가 가장 큰 교차점 2개의 중간에 위치할 수 있다. 예를 들어, 제1 교차점(C1) 및 제2 교차점(C2) 사이의 거리가 가장 큰 경우, 기준점(P)은 제1 교차점(C1) 및 제2 교차점(C2)의 중앙에 위치하는 점이 될 수 있다.
일 실시예에 따르면, 라이다 장치(2004)는 상기 구의 원점인 기준점(P)을 기준으로 라이다 장치로부터 대상체까지의 거리를 산출할 수 있다.
예를 들어, 라이다 장치(2004)는 제1 빅셀 어레이(2410)로부터 대상체까지의 거리를 산출할 수 있다. 또한 라이다 장치(2004)는 상기 기준점(P)으로부터 제1 빅셀 어레이(2410)까지의 거리를 산출할 수 있다. 이때, 라이다 장치(2004)는 라이다 장치(2004)로부터 대상체까지의 거리를 상기 기준점(P)으로부터 대상체까지의 거리로 정할 수 있다. 상기 기준점(P)으로부터 대상체까지의 거리는 제1 빅셀 어레이(2410)로부터 대상체까지의 거리에서 상기 기준점(P)으로부터 제1 빅셀 어레이(2410)까지의 거리를 합한 값일 수 있다.
또한 예를 들어, 라이다 장치(2004)는 제2 빅셀 어레이(2420)로부터 대상체까지의 거리를 산출할 수 있다. 또한 라이다 장치(2004)는 상기 기준점(P)으로부터 제2 빅셀 어레이(2420)까지의 거리를 산출할 수 있다. 이때, 라이다 장치(2004)는 라이다 장치(2004)로부터 대상체까지의 거리를 상기 기준점(P)으로부터 대상체까지의 거리로 정할 수 있다. 상기 기준점(P)으로부터 대상체까지의 거리는 제2 빅셀 어레이(2420)로부터 대상체까지의 거리에서 상기 기준점(P)으로부터 제2 빅셀 어레이(2420)까지의 거리를 합한 값일 수 있다.
또한 예를 들어, 라이다 장치(2004)는 제3 빅셀 어레이(2430)로부터 대상체까지의 거리를 산출할 수 있다. 또한 라이다 장치(2004)는 상기 기준점(P)으로부터 제3 빅셀 어레이(2430)까지의 거리를 산출할 수 있다. 이때, 라이다 장치(2004)는 라이다 장치(2004)로부터 대상체까지의 거리를 상기 기준점(P)으로부터 대상체까지의 거리로 정할 수 있다. 상기 기준점(P)으로부터 대상체까지의 거리는 제3 빅셀 어레이(2430)로부터 대상체까지의 거리에서 상기 기준점(P)으로부터 제3 빅셀 어레이(2430)까지의 거리를 합한 값일 수 있다.
위의 실시 예는 빅셀 모듈이 3개인 경우를 기준으로 설명되었으나, 빅셀 모듈이 4개인 경우, 5개인 경우 등에도 적용될 수 있다.
이하에서는 빅셀 모듈 내의 복수 개의 빅셀 어레이에 기초한 거리 측정을 위한 기준점에 대해 상세히 설명한다.
도 51 내지 도 52은 다른 일 실시예에 따른 빅셀 모듈 내의 거리 측정 기준점을 나타내는 도면이다.
도 51 내지 도 52을 참조하면, 일 실시예에 따른 빅셀 모듈(2500)은 바디(2501), 제1 면(2502) 및 레이저 출력부(2530)를 포함할 수 있다. 또한, 레이저 출력부(2530)는 제1 빅셀 어레이(2510) 및 제2 빅셀 어레이(2520)를 포함할 수 있다.
도 51 내지 도 52은 제1 빅셀 어레이(2510) 및 제2 빅셀 어레이(2520)가 상하로 배치된 빅셀 모듈(2500)을 도시하고 있으나, 이에 한정되지 않는다.
도 51는 빅셀 모듈(2500)을 화살표 방향에서 본 모습을 나타낸 도면이다.
도 51를 참조하면, 빅셀 모듈(2500)은 제1 빅셀 어레이(2510) 및 제2 빅셀 어레이(2520)를 포함할 수 있다.
일 실시예에 따르면, 빅셀 모듈(2500)의 제1 빅셀 어레이(2510)가 배치되는 제1 면(2502)과 수직하고, 제1 빅셀 어레이(2510)가 레이저 빔을 출력하는 방향의 후방으로 연장되는 제1 가상선(L1)이 존재할 수 있다.
상기 제1 가상선(L1)은 제1 빅셀 어레이(2510)의 제1 지점에서 연장되는 가상선일 수 있다. 예를 들어, 상기 제1 지점은 제1 빅셀 어레이(2510)의 중앙지점일 수 있으나 이에 한정되지 않는다. 또한 예를 들어, 상기 제1 지점은 제1 빅셀 어레이(2510)의 일지점, 예를 들어 중앙 지점을 기준으로 x축 및 y축에 대하여 일정한 좌표를 갖는 지점일 수 있다. 예를 들어, 상기 제1 지점은 제1 빅셀 어레이(2510)의 중앙 지점을 기준으로 x축 및 y축에 대하여 (a,b)의 좌표를 갖는 지점일 수 있다.
또한 일 실시예에 따르면, 빅셀 모듈(2500)의 제2 빅셀 (2520)가 배치되는 제1 면(2502)과 수직하고, 제2 빅셀 어레이(2520)가 레이저 빔을 출력하는 방향의 후방으로 연장되는 제2 가상선(L2)이 존재할 수 있다.
상기 제2 가상선(L2)은 제2 빅셀 어레이(2520)의 제2 지점에서 연장되는 가상선일 수 있다. 예를 들어, 상기 제2 지점은 제2 빅셀 어레이(2520)의 중앙지점일 수 있다. 또한 예를 들어, 상기 제2 지점은 제1 빅셀 어레이(2520)의 일지점, 예를 들어 중앙 지점을 기준으로 x축 및 y축에 대하여 일정한 좌표를 갖는 지점일 수 있다. 예를 들어, 상기 제2 지점은 제2 빅셀 어레이(2520)의 중앙 지점을 기준으로 x축 및 y축에 대하여 (c,d)의 좌표를 갖는 지점일 수 있다.
상기 제1 지점 및 상기 제2 지점이 각 빅셀 어레이의 중앙 지점을 기준으로 좌표를 갖는 경우, 상기 제1 지점의 좌표와 상기 제2 지점의 좌표는 동일할 수 있다. 예를 들어, 상기 제1 지점의 좌표인 (a,b)와 상기 제2 지점의 좌표인 (c,d)에 있어서, a와 c가 동일하고, b와 d가 동일할 수 있다.
일 실시예에 따르면, 제1 가상선(L1)을 따라 제1 빅셀 어레이(2510)와 미리 정해진 값인 제1 간격만큼 이격된 제1 지점(A1)이 존재할 수 있다.
또한 일 실시예에 따르면, 제2 가상선(L2)을 따라 제2 빅셀 어레이(2510)와 미리 정해진 값인 제1 간격만큼 이격된 제2 지점(A2)이 존재할 수 있다.
라이다 장치는 제1 지점(A1) 및 제2 지점(A2)의 중앙 지점을 기준점(P)으로 정할 수 있다. 이때, 제1 지점(A1) 및 제2 지점(A2)은 빅셀 모듈(2500)의 수직축에 대하여 일축에 위치할 수 있다. 또한, 제1 지점(A1) 및 제2 지점(A2)은 빅셀 모듈(2500)의 수평축에 대하여 동일한 위치값을 가질 수 있다.
이때, 기준점(P)으로부터 제1 빅셀 어레이(2510)의 일 지점까지의 거리와 기준점(P)으로부터 제2 빅셀 어레이(2520)의 일 지점까지의 거리는 동일할 수 있다. 예를 들어 상기 일 지점은 제1 빅셀 어레이(2510)의 중앙부분, 센터일 수 있다. 또는 예를 들어 상기 일 지점은 제2 빅셀 어레이(2520)의 중앙부분, 센터일 수 있다.
일 실시예에 따르면, 라이다 장치는 상기 기준점(P)을 기준으로 라이다 장치로부터 대상체까지의 거리를 산출할 수 있다.
예를 들어, 라이다 장치는 제1 빅셀 어레이(2510)로부터 대상체까지의 거리를 산출할 수 있다. 또한 라이다 장치는 상기 기준점(P)으로부터 제1 빅셀 어레이(2510)까지의 거리를 산출할 수 있다. 이때, 라이다 장치는 라이다 장치로부터 대상체까지의 거리를 상기 기준점(P)으로부터 대상체까지의 거리로 정할 수 있다. 상기 기준점(P)으로부터 대상체까지의 거리는 제1 빅셀 어레이(2510)로부터 대상체까지의 거리에서 상기 기준점(P)으로부터 제1 빅셀 어레이(2510)까지의 거리를 합한 값일 수 있다.
또한 예를 들어, 라이다 장치는 제2 빅셀 어레이(2520)로부터 대상체까지의 거리를 산출할 수 있다. 또한 라이다 장치는 상기 기준점(P)으로부터 제2 빅셀 어레이(2520)까지의 거리를 산출할 수 있다. 이때, 라이다 장치는 라이다 장치로부터 대상체까지의 거리를 상기 기준점(P)으로부터 대상체까지의 거리로 정할 수 있다. 상기 기준점(P)으로부터 대상체까지의 거리는 제2 빅셀 어레이(2520)로부터 대상체까지의 거리에서 상기 기준점(P)으로부터 제2 빅셀 어레이(2520)까지의 거리를 합한 값일 수 있다.
위의 실시 예는 빅셀 모듈 내에 빅셀 어레이가 2개인 경우를 기준으로 설명되었으나, 빅셀 어레이가 3개인 경우, 4개인 경우, 5개인 경우 등에도 적용될 수 있다.
도 52은 빅셀 모듈(2500)을 화살표 방향에서 본 모습을 나타낸 도면이다.
일 실시예에 따르면, 빅셀 모듈(2500)의 제1 빅셀 어레이(2510)가 배치되는 제1 면(2502)과 수직하고, 제1 빅셀 어레이(2510)가 레이저 빔을 출력하는 방향의 후방으로 연장되는 제1 가상선(L1)이 존재할 수 있다.
라이다 장치는 제1 가상선(L1)을 따라 제1 빅셀 어레이(2510)와 미리 정해진 값인 제1 간격(R)만큼 이격된 지점을 기준점(P)으로 정할 수 있다. 이에 한정되지 않고, 기준점(P)는 제2 빅셀 어레이(2520)와 미리 정해진 값인 제1 간격(R)만큼 이격된 지점일 수 있다.
일 실시예에 따르면, 라이다 장치는 상기 기준점(P)을 기준으로 라이다 장치로부터 대상체까지의 거리를 산출할 수 있다.
예를 들어, 라이다 장치는 제1 빅셀 어레이(2510)로부터 대상체까지의 거리를 산출할 수 있다. 또한 라이다 장치는 상기 기준점(P)으로부터 제1 빅셀 어레이(2510)까지의 거리를 산출할 수 있다. 이때, 라이다 장치는 라이다 장치로부터 대상체까지의 거리를 상기 기준점(P)으로부터 대상체까지의 거리로 정할 수 있다. 상기 기준점(P)으로부터 대상체까지의 거리는 제1 빅셀 어레이(2510)로부터 대상체까지의 거리에서 상기 기준점(P)으로부터 제1 빅셀 어레이(2510)까지의 거리를 합한 값일 수 있다.
또한 예를 들어, 라이다 장치는 제2 빅셀 어레이(2520)로부터 대상체까지의 거리를 산출할 수 있다. 또한 라이다 장치는 상기 기준점(P)으로부터 제2 빅셀 어레이(2520)까지의 거리를 산출할 수 있다. 이때, 라이다 장치는 라이다 장치로부터 대상체까지의 거리를 상기 기준점(P)으로부터 대상체까지의 거리로 정할 수 있다. 상기 기준점(P)으로부터 대상체까지의 거리는 제2 빅셀 어레이(2520)로부터 대상체까지의 거리에서 상기 기준점(P)으로부터 제2 빅셀 어레이(2520)까지의 거리를 합한 값일 수 있다.
이때, 상기 기준점(P)으로부터 제1 빅셀 어레이(2510)까지의 거리는 미리 정해진 값인 제1 간격(R)이 될 수 있다.
또한, 상기 기준점(P)으로부터 제2 빅셀 어레이(2520)까지의 거리는 상기 제1 간격 및 제1 빅셀 어레이(2510), 제2 빅셀 어레이(2520), 기준점(P)이 이루는 각도(θ)에 기초하여 산출될 수 있다.
예를 들어, 상기 기준점(P)으로부터 제2 빅셀 어레이(2520)까지의 거(d)는 R/cosθ 일 수 있다.
위의 실시 예는 빅셀 모듈 내에 빅셀 어레이가 2개인 경우를 기준으로 설명되었으나, 빅셀 어레이가 3개인 경우, 4개인 경우, 5개인 경우 등에도 적용될 수 있다.
도 53 내지 도 54는 또 다른 일 실시예에 따른 빅셀 모듈 내의 거리 측정 기준점을 나타내는 도면이다.
도 53 내지 도 54를 참조하면, 일 실시예에 따른 빅셀 모듈(2600)은 바디(2601), 제1 면(2602) 및 레이저 출력부(2630)를 포함할 수 있다. 또한, 레이저 출력부(2630)는 제1 빅셀 어레이(2610) 및 제2 빅셀 어레이(2620)를 포함할 수 있다.
도 53 내지 도 54는 제1 빅셀 어레이(2610) 및 제2 빅셀 어레이(2620)가 좌우로 배치된 빅셀 모듈(2600)을 도시하고 있으나, 이에 한정되지 않는다.
도 53은 빅셀 모듈(2600)을 화살표 방향에서 본 모습을 나타낸 도면이다.
도 53을 참조하면, 빅셀 모듈(2600)은 제1 빅셀 어레이(2610) 및 제2 빅셀 어레이(2620)를 포함할 수 있다.
일 실시예에 따르면, 빅셀 모듈(2600)의 제1 빅셀 어레이(2610)가 배치되는 제1 면(2602)과 수직하고, 제1 빅셀 어레이(2610)가 레이저 빔을 출력하는 방향의 후방으로 연장되는 제1 가상선(L1)이 존재할 수 있다.
또한 일 실시예에 따르면, 빅셀 모듈(2600)의 제2 빅셀 (2620)가 배치되는 제1 면(2602)과 수직하고, 제2 빅셀 어레이(2620)가 레이저 빔을 출력하는 방향의 후방으로 연장되는 제2 가상선(L2)이 존재할 수 있다.
일 실시예에 따르면, 제1 가상선(L1)을 따라 제1 빅셀 어레이(2610)와 미리 정해진 값인 제1 간격만큼 이격된 제1 지점(A1)이 존재할 수 있다.
또한 일 실시예에 따르면, 제2 가상선(L2)을 따라 제2 빅셀 어레이(2610)와 미리 정해진 값인 제1 간격만큼 이격된 제2 지점(A2)이 존재할 수 있다.
라이다 장치는 제1 지점(A1) 및 제2 지점(A2)의 중앙 지점을 기준점(P)으로 정할 수 있다. 이때, 제1 지점(A1) 및 제2 지점(A2)은 빅셀 모듈(2600)의 수평축에 대하여 일축에 위치할 수 있다. 또한, 제1 지점(A1) 및 제2 지점(A2)은 빅셀 모듈(2600)의 수직축에 대하여 동일한 위치값을 가질 수 있다.
이때, 기준점(P)으로부터 제1 빅셀 어레이(2610)의 일 지점까지의 거리와 기준점(P)으로부터 제2 빅셀 어레이(2620)의 일 지점까지의 거리는 동일할 수 있다. 예를 들어 상기 일 지점은 제1 빅셀 어레이(2610)의 중앙부분, 센터일 수 있다. 또는 예를 들어 상기 일 지점은 제2 빅셀 어레이(2620)의 중앙부분, 센터일 수 있다.
일 실시예에 따르면, 라이다 장치는 상기 기준점(P)을 기준으로 라이다 장치로부터 대상체까지의 거리를 산출할 수 있다.
예를 들어, 라이다 장치는 제1 빅셀 어레이(2610)로부터 대상체까지의 거리를 산출할 수 있다. 또한 라이다 장치는 상기 기준점(P)으로부터 제1 빅셀 어레이(2610)까지의 거리를 산출할 수 있다. 이때, 라이다 장치는 라이다 장치로부터 대상체까지의 거리를 상기 기준점(P)으로부터 대상체까지의 거리로 정할 수 있다. 상기 기준점(P)으로부터 대상체까지의 거리는 제1 빅셀 어레이(2610)로부터 대상체까지의 거리에서 상기 기준점(P)으로부터 제1 빅셀 어레이(2610)까지의 거리를 합한 값일 수 있다.
또한 예를 들어, 라이다 장치는 제2 빅셀 어레이(2620)로부터 대상체까지의 거리를 산출할 수 있다. 또한 라이다 장치는 상기 기준점(P)으로부터 제2 빅셀 어레이(2620)까지의 거리를 산출할 수 있다. 이때, 라이다 장치는 라이다 장치로부터 대상체까지의 거리를 상기 기준점(P)으로부터 대상체까지의 거리로 정할 수 있다. 상기 기준점(P)으로부터 대상체까지의 거리는 제2 빅셀 어레이(2620)로부터 대상체까지의 거리에서 상기 기준점(P)으로부터 제2 빅셀 어레이(2620)까지의 거리를 합한 값일 수 있다.
위의 실시 예는 빅셀 모듈 내에 빅셀 어레이가 2개인 경우를 기준으로 설명되었으나, 빅셀 어레이가 3개인 경우, 4개인 경우, 5개인 경우 등에도 적용될 수 있다.
도 54는 빅셀 모듈(2500)을 화살표 방향에서 본 모습을 나타낸 도면이다.
일 실시예에 따르면, 빅셀 모듈(2600)의 제1 빅셀 어레이(2610)가 배치되는 제1 면(2602)과 수직하고, 제1 빅셀 어레이(2610)가 레이저 빔을 출력하는 방향의 후방으로 연장되는 제1 가상선(L1)이 존재할 수 있다.
라이다 장치는 제1 가상선(L1)을 따라 제1 빅셀 어레이(2610)와 미리 정해진 값인 제1 간격(R)만큼 이격된 지점을 기준점(P)으로 정할 수 있다. 이에 한정되지 않고, 기준점(P)는 제2 빅셀 어레이(2620)와 미리 정해진 값인 제1 간격(R)만큼 이격된 지점일 수 있다.
일 실시예에 따르면, 라이다 장치는 상기 기준점(P)을 기준으로 라이다 장치로부터 대상체까지의 거리를 산출할 수 있다.
예를 들어, 라이다 장치는 제1 빅셀 어레이(2610)로부터 대상체까지의 거리를 산출할 수 있다. 또한 라이다 장치는 상기 기준점(P)으로부터 제1 빅셀 어레이(2610)까지의 거리를 산출할 수 있다. 이때, 라이다 장치는 라이다 장치로부터 대상체까지의 거리를 상기 기준점(P)으로부터 대상체까지의 거리로 정할 수 있다. 상기 기준점(P)으로부터 대상체까지의 거리는 제1 빅셀 어레이(2610)로부터 대상체까지의 거리에서 상기 기준점(P)으로부터 제1 빅셀 어레이(2610)까지의 거리를 합한 값일 수 있다.
또한 예를 들어, 라이다 장치는 제2 빅셀 어레이(2620)로부터 대상체까지의 거리를 산출할 수 있다. 또한 라이다 장치는 상기 기준점(P)으로부터 제2 빅셀 어레이(2620)까지의 거리를 산출할 수 있다. 이때, 라이다 장치는 라이다 장치로부터 대상체까지의 거리를 상기 기준점(P)으로부터 대상체까지의 거리로 정할 수 있다. 상기 기준점(P)으로부터 대상체까지의 거리는 제2 빅셀 어레이(2620)로부터 대상체까지의 거리에서 상기 기준점(P)으로부터 제2 빅셀 어레이(2620)까지의 거리를 합한 값일 수 있다.
이때, 상기 기준점(P)으로부터 제1 빅셀 어레이(2610)까지의 거리는 미리 정해진 값인 제1 간격(R)이 될 수 있다.
또한, 상기 기준점(P)으로부터 제2 빅셀 어레이(2620)까지의 거리는 상기 제1 간격 및 제1 빅셀 어레이(2610), 제2 빅셀 어레이(2620), 기준점(P)이 이루는 각도(θ)에 기초하여 산출될 수 있다.
예를 들어, 상기 기준점(P)으로부터 제2 빅셀 어레이(2620)까지의 거(d)는 R/cosθ 일 수 있다.
위의 실시 예는 빅셀 모듈 내에 빅셀 어레이가 2개인 경우를 기준으로 설명되었으나, 빅셀 어레이가 3개인 경우, 4개인 경우, 5개인 경우 등에도 적용될 수 있다.
도 55은 일 실시예에 따른 빅셀 어레이를 위에서 본 모습을 나타내는 도면이다.
도 55을 참조하면, 빅셀 어레이는 복수 개의 빅셀 유닛(2020)을 포함할 수 있다. 복수 개의 빅셀 유닛(2020)은 대상체(2010)를 향해 레이저 빔을 조사할 수 있다.
복수 개의 빅셀 유닛(2020)은 표(2050)에서 나타난 바와 같이, 스티어링 각도가 정해질 수 있으나, 이에 한정되지 않는다. 예를 들어, 복수 개의 빅셀 유닛(2020)은 5X5의 매트릭스 형태일 수 있으나 이에 한정되지 않는다. 또한 예를 들어, 복수 개의 빅셀 유닛(2020)은 스티어링 각도가 행방향으로 점점 증가할 수 있다.
예를 들어, (1,1)의 빅셀 유닛은 0도의 스티어링 각도를 가질 수 있다. 또한, 예를 들어 (1,2)의 빅셀 유닛은 1도의 스티어링 각도를 가질 수 있다. 또한 예를 들어 (1,3)의 빅셀 유닛은 2도의 스티어링 각도를 가질 수 있다. 또한 예를 들어 (1,4)의 빅셀 유닛은 3도의 스티어링 각도를 가질 수 있다. 또한 예를 들어 (1,5)의 빅셀 유닛은 4도의 스티어링 각도를 가질 수 있다. 또한 예를 들어 (2,1)의 빅셀 유닛은 5도의 스티어링 각도를 가질 수 있다. 이와 같이 행방향으로 갈수록 스티어링 각도이 커지면서, (5,5)의 빅셀 유닛은 24도의 스티어링 각도를 가질 수 있다.
도 55은 복수 개의 빅셀 유닛들(2020)이 표(2050)에 따른 스티어링 각도를 가질 때 조사하는 레이저 빔을 도시하고 있다. 빅셀 어레이가 복수 개의 빅셀 유닛을 가질 경우, 각각의 빅셀 유닛에 대하여 다양한 거리 측정의 기준점이 존재할 수 있다. 상기 기준점은 가상의 평면(2030)에 포함될 수 있다. 기준점이 다양할 경우, 라이다 장치로부터 대상체까지의 거리를 파악함에 있어서, 동일한 거리라도 빅셀 유닛의 위치에 따라 산출되는 거리가 다양할 수 있다.
위와 같은 문제점을 해결하기 위해, 빅셀 어레이가 복수 개의 빅셀 유닛을 포함하는 경우, 거리 산출의 기준이 되는 고정된 기준점을 정하여 상기 기준점에 의해 거리를 산출할 수 있다.
또는 위와 같은 문제점을 해결하기 위해, 빅셀 어레이가 복수 개의 빅셀 유닛을 포함하는 경우, 각각 빅셀 유닛들의 기준점을 모두 포함할 수 있는 기준 범위를 설정하여, 기준 범위의 원점을 거리 산출의 기준이 되는 기준점으로 정하여 상기 기준점에 의해 거리를 산출할 수 있다.
도 55을 참조하면, 복수 개의 빅셀 유닛들(2020)로부터 조사되는 레이저 빔을 진행 방향의 후방으로 연장하면, 빅셀 유닛(2020)으로부터 미리 정해진 거리만큼 이격된 가상면(2030)에 도달하는 가상선이 존재할 수 있다. 기준 범위(2040)는 상기 복수 개의 가상선들을 모두 포함할 수 있는 최소 직경(D)을 가지는 구 형태일 수 있다. 상기 기준 범위(2040)의 원점을 거리 측정의 기준점으로 정할 수 있다.
상기 기준점에 라이다 장치로부터 대상체까지의 거리를 측정할 수 있다. 라이다 장치로부터 대상체까지의 거리는 상기 기준점으로부터 빅셀 유닛(2020)까지의 거리와 빅셀 유닛(2020)으로부터 대상체까지의 거리를 합한 값일 수 있다. 상기 기준점으로부터 빅셀 유닛(2020)까지의 거리는 미리 정해진 값이고, 빅셀 유닛(2020)으로부터 대상체까지의 거리는 빅셀 유닛(2020)으로부터 출력된 레이저 빔의 비행 경로를 따라 컨트롤러에 의해 산출될 수 있다.
그러나, 도 55의 기준 범위(2040)의 직경(D)은 다소 클 수 있어, 기준 범위(2040)의 원점을 기준점으로 하는 경우, 복수 개의 빅셀 유닛(2020) 각각의 기준점과 오차가 있을 수 있다. 기준 범위의 원점과 각 빅셀 유닛의 기준점간의 오차를 줄이기 위한 방법이 아래에서 자세히 설명된다.
도 56는 다른 일 실시예에 따른 빅셀 어레이를 위에서 본 모습을 나타내는 도면이다.
도 56을 참조하면, 빅셀 어레이는 복수 개의 빅셀 유닛(2021)을 포함할 수 있다. 복수 개의 빅셀 유닛(2021)은 대상체(2011)를 향해 레이저 빔을 조사할 수 있다.
복수 개의 빅셀 유닛(2021)은 표(2051)에서 나타난 바와 같이, 스티어링 각도가 정해질 수 있으나, 이에 한정되지 않는다. 예를 들어, 복수 개의 빅셀 유닛(2021)은 5X5의 매트릭스 형태일 수 있으나 이에 한정되지 않는다. 또한 예를 들어, 복수 개의 빅셀 유닛(2021)은 스티어링 각도가 열방향으로 점점 증가할 수 있다.
예를 들어, (1,1)의 빅셀 유닛은 0도의 스티어링 각도를 가질 수 있다. 또한, 예를 들어 (2,1)의 빅셀 유닛은 1도의 스티어링 각도를 가질 수 있다. 또한 예를 들어 (3,1)의 빅셀 유닛은 2도의 스티어링 각도를 가질 수 있다. 또한 예를 들어 (4,1)의 빅셀 유닛은 3도의 스티어링 각도를 가질 수 있다. 또한 예를 들어 (5,1)의 빅셀 유닛은 4도의 스티어링 각도를 가질 수 있다. 또한 예를 들어 (1,2)의 빅셀 유닛은 5도의 스티어링 각도를 가질 수 있다. 이와 같이 열방향으로 갈수록 스티어링 각도이 커지면서, (5,5)의 빅셀 유닛은 24도의 스티어링 각도를 가질 수 있다.
도 56는 복수 개의 빅셀 유닛들(2021)이 표(2051)에 따른 스티어링 각도를 가질 때 조사하는 레이저 빔을 도시하고 있다. 빅셀 어레이가 복수 개의 빅셀 유닛을 가질 경우, 각각의 빅셀 유닛에 대하여 다양한 거리 측정의 기준점이 존재할 수 있다. 상기 기준점은 가상의 평면(2031)에 포함될 수 있다. 기준점이 다양할 경우, 라이다 장치로부터 대상체까지의 거리를 파악함에 있어서, 동일한 거리라도 빅셀 유닛의 위치에 따라 산출되는 거리가 다양할 수 있다.
위와 같은 문제점을 해결하기 위해, 빅셀 어레이가 복수 개의 빅셀 유닛을 포함하는 경우, 거리 산출의 기준이 되는 고정된 기준점을 정하여 상기 기준점에 의해 거리를 산출할 수 있다.
또는 위와 같은 문제점을 해결하기 위해, 빅셀 어레이가 복수 개의 빅셀 유닛을 포함하는 경우, 각각 빅셀 유닛들의 기준점을 모두 포함할 수 있는 기준 범위를 설정하여, 기준 범위의 원점을 거리 산출의 기준이 되는 기준점으로 정하여 상기 기준점에 의해 거리를 산출할 수 있다.
도 56를 참조하면, 복수 개의 빅셀 유닛들(2021)로부터 조사되는 레이저 빔을 진행 방향의 후방으로 연장하면, 빅셀 유닛(2021)으로부터 미리 정해진 거리만큼 이격된 가상면(2031)에 도달하는 가상선이 존재할 수 있다. 기준 범위(2041)는 상기 복수 개의 가상선들을 모두 포함할 수 있는 최소 직경(D)을 가지는 구 형태일 수 있다. 상기 기준 범위(2041)의 원점을 거리 측정의 기준점으로 정할 수 있다.
상기 기준점에 라이다 장치로부터 대상체까지의 거리를 측정할 수 있다. 라이다 장치로부터 대상체까지의 거리는 상기 기준점으로부터 빅셀 유닛(2021)까지의 거리와 빅셀 유닛(2021)으로부터 대상체까지의 거리를 합한 값일 수 있다. 상기 기준점으로부터 빅셀 유닛(2021)까지의 거리는 미리 정해진 값이고, 빅셀 유닛(2021)으로부터 대상체까지의 거리는 빅셀 유닛(2021)으로부터 출력된 레이저 빔의 비행 경로를 따라 컨트롤러에 의해 산출될 수 있다.
도 56의 기준 범위(2041)의 직경(D)은 도 55의 기준 범위(2040)의 직경(D)보다 작을 수 있다. 그러므로 도 56의 기준 범위(2041)의 원점과 각 빅셀 유닛(2021)의 기준점간의 오차는 도 55의 기준 범위(2040)의 원점과 각 빅셀 유닛(2020)의 기준점간의 오차보다 작을 수 있다. 그러므로 복수 개의 빅셀 유닛에 대한 기준점의 범위를 고려할 때, 복수 개의 빅셀 유닛의 스티어링 각도는 행방향으로 증가하는 경우보다 열방향으로 증가하는 경우가 더 유리할 수 있다.
도 57 내지 도 58은 일 실시예에 따른 라이다 장치를 나타내는 도면이다.
도 57 내지 도 58을 참조하면, 일 실시예에 따른 라이다 장치(2700)는 복수 개의 빅셀 모듈(2701, 2703, 2705)을 포함할 수 있다. 빅셀 모듈은 빅셀 어레이(2702, 2704, 2706)를 포함할 수 있다. 빅셀 어레이는 레이저 다발(2710, 2720, 2730)을 출력할 수 있다.
일 실시예에 따른 빅셀 어레이(2702, 2704, 2706)는 빅셀 모듈(2701, 2703, 2705)의 외부에 배치될 수 있다. 빅셀 모듈(2701, 2703, 2705)의 외부에 배치된 빅셀 어레이(2702, 2704, 2706)는 빅셀 모듈(2701, 2703, 2705)의 외부를 향하는 방향으로 레이저 다발(2710, 2720, 2730)을 출력할 수 있다.
일 실시예에 따른 라이다 장치(2700)는 제1 빅셀 모듈(2701), 제2 빅셀 모듈(2703) 및 제3 빅셀 모듈(2705)을 포함할 수 있다. 라이다 장치(2700)는 3개의 빅셀 모듈을 포함할 수 있으나, 1개, 2개, 4개, 5개, 6개 등의 경우도 가능하다.
일 실시예에 따른 제1 빅셀 모듈(2701)은 제1 빅셀 어레이(2702)를 포함할 수 있다. 제1 빅셀 어레이(2702)는 제1 레이저 다발(2710)을 출력할 수 있다. 제1 빅셀 어레이(2702)는 대상체를 향해 제1 레이저 다발(2710)을 출력할 수 있다. 제1 레이저 다발(2710)은 수직 FOV 및 수평 FOV를 형성할 수 있다. 제1 레이저 다발(2710)은 대상체로부터 반사되어 제1 빅셀 모듈(2701)의 수광부에 감지될 수 있다.
일 실시예에 따른 제2 빅셀 모듈(2703)은 제1 빅셀 어레이(2704)를 포함할 수 있다. 제2 빅셀 어레이(2704)는 제2 레이저 다발(2720)을 출력할 수 있다. 제2 빅셀 어레이(2704)는 대상체를 향해 제2 레이저 다발(2720)을 출력할 수 있다. 제2 레이저 다발(2720)은 수직 FOV 및 수평 FOV를 형성할 수 있다. 제2 레이저 다발(2720)은 대상체로부터 반사되어 제2 빅셀 모듈(2703)의 수광부에 감지될 수 있다.
일 실시예에 따른 제3 빅셀 모듈(2705)은 제3 빅셀 어레이(2706)를 포함할 수 있다. 제3 빅셀 어레이(2706)는 제3 레이저 다발(2730)을 출력할 수 있다. 제3 빅셀 어레이(2706)는 대상체를 향해 제3 레이저 다발(2730)을 출력할 수 있다. 제3 레이저 다발(2730)은 수직 FOV 및 수평 FOV를 형성할 수 있다. 제3 레이저 다발(2730)은 대상체로부터 반사되어 제3 빅셀 모듈(2705)의 수광부에 감지될 수 있다.
일 실시예에 따른 라이다 장치(2700)는 데드존(2740)을 형성할 수 있다. 상기 데드존(2740)은 빅셀 모듈 사이의 평행한 레이저 빔에 의해 발생할 수 있다. 상기 데드존(2740)은 레이저 빔이 조사되지 않는 영역을 의미할 수 있다.
예를 들어, 제1 빅셀 모듈(2701)은 제1 빅셀 어레이(2702)에 의해 제1 레이저 다발(2710)을 출력할 수 있다. 또한 예를 들어, 제2 빅셀 모듈(2703)은 제2 빅셀 어레이(2704)에 의해 제2 레이저 다발(2720)을 출력할 수 있다. 상기 제1 레이저 다발(2710)의 최외곽 레이저 빔은 상기 제2 레이저 다발(2720)의 최외곽 레이저 빔과 평행할 수 있다. 상기 제1 레이저 다발(2710)의 최외곽 레이저 빔은 상기 제2 레이저 다발(2720)의 최외곽 레이저 빔과 평행하기 때문에, 제1 빅셀 모듈(2701)과 제2 빅셀 모듈(2703) 사이에 레이저 빔이 조사되지 않는 데드존(2740)이 형성될 수 있다.
또한 예를 들어, 제2 빅셀 모듈(2703)은 제2 빅셀 어레이(2704)에 의해 제2 레이저 다발(2720)을 출력할 수 있다. 또한 예를 들어, 제3 빅셀 모듈(2705)은 제3 빅셀 어레이(2706)에 의해 제3 레이저 다발(2730)을 출력할 수 있다. 상기 제2 레이저 다발(2720)의 최외곽 레이저 빔은 상기 제3 레이저 다발(2730)의 최외곽 레이저 빔과 평행할 수 있다. 상기 제2 레이저 다발(2720)의 최외곽 레이저 빔은 상기 제3 레이저 다발(2730)의 최외곽 레이저 빔과 평행하기 때문에, 제2 빅셀 모듈(2703)과 제3 빅셀 모듈(2705) 사이에 레이저 빔이 조사되지 않는 데드존(2740)이 형성될 수 있다.
데드존(2740)이 형성되면, 상기 데드존(2740)에는 레이저 빔이 조사되지 않는다. 따라서, 라이다 장치(2700)는 데드존(2740)에 위치하는 대상체를 감지할 수 없다.
이러한 문제점을 해결하기 위해 아래와 같은 구조를 채택할 수 있다.
도 58을 참조하면, 일 실시예에 따른 라이다 장치(2700)는 복수 개의 빅셀 모듈(2701, 2703, 2705)을 포함할 수 있다. 빅셀 모듈은 빅셀 어레이(2702, 2704, 2706)를 포함할 수 있다. 빅셀 어레이는 레이저 다발(2710, 2720, 2730)을 출력할 수 있다.
일 실시예에 따른 빅셀 어레이(2702, 2704, 2706)는 빅셀 모듈(2701, 2703, 2705)의 외부에 배치될 수 있다. 빅셀 모듈(2701, 2703, 2705)의 외부에 배치된 빅셀 어레이(2702, 2704, 2706)는 빅셀 모듈(2701, 2703, 2705)의 외부를 향하는 방향으로 레이저 다발(2710, 2720, 2730)을 출력할 수 있다.
일 실시예에 따른 라이다 장치(2700)는 제1 빅셀 모듈(2701), 제2 빅셀 모듈(2703) 및 제3 빅셀 모듈(2705)을 포함할 수 있다. 라이다 장치(2700)는 3개의 빅셀 모듈을 포함할 수 있으나, 1개, 2개, 4개, 5개, 6개 등의 경우도 가능하다.
일 실시예에 따른 제1 빅셀 모듈(2701)은 제1 빅셀 어레이(2702)를 포함할 수 있다. 제1 빅셀 어레이(2702)는 제1 레이저 다발(2710)을 출력할 수 있다. 제1 빅셀 어레이(2702)는 대상체를 향해 제1 레이저 다발(2710)을 출력할 수 있다. 제1 레이저 다발(2710)은 수직 FOV 및 수평 FOV를 형성할 수 있다. 제1 레이저 다발(2710)은 대상체로부터 반사되어 제1 빅셀 모듈(2701)의 수광부에 감지될 수 있다.
일 실시예에 따른 제2 빅셀 모듈(2703)은 제1 빅셀 어레이(2704)를 포함할 수 있다. 제2 빅셀 어레이(2704)는 제2 레이저 다발(2720)을 출력할 수 있다. 제2 빅셀 어레이(2704)는 대상체를 향해 제2 레이저 다발(2720)을 출력할 수 있다. 제2 레이저 다발(2720)은 수직 FOV 및 수평 FOV를 형성할 수 있다. 제2 레이저 다발(2720)은 대상체로부터 반사되어 제2 빅셀 모듈(2703)의 수광부에 감지될 수 있다.
일 실시예에 따른 제3 빅셀 모듈(2705)은 제3 빅셀 어레이(2706)를 포함할 수 있다. 제3 빅셀 어레이(2706)는 제3 레이저 다발(2730)을 출력할 수 있다. 제3 빅셀 어레이(2706)는 대상체를 향해 제3 레이저 다발(2730)을 출력할 수 있다. 제3 레이저 다발(2730)은 수직 FOV 및 수평 FOV를 형성할 수 있다. 제3 레이저 다발(2730)은 대상체로부터 반사되어 제3 빅셀 모듈(2705)의 수광부에 감지될 수 있다.
일 실시예에 따른 라이다 장치의 빅셀 모듈들로부터 출력되는 최외곽 레이저 빔은 서로 평행하지 않을 수 있다.
예를 들어, 상기 제1 레이저 다발(2710)의 최외곽 레이저 빔은 상기 제2 레이저 다발(2720)의 최외곽 레이저 빔과 평행하지 않을 수 있다. 상기 제1 레이저 다발(2710)의 최외곽 레이저 빔은 상기 제2 레이저 다발(2720)의 최외곽 레이저 빔과 평행하지 않기 때문에, 제1 레이저 다발(2710)과 제2 레이저 다발(2720)은 오버랩될 수 있다. 제1 레이저 다발(2710)과 제2 레이저 다발(2720)은 오버랩되기 때문에, 제1 빅셀 모듈(2701)과 제2 빅셀 모듈(2703) 사이에 레이저 빔이 조사되지 않는 데드존이 형성되지 않을 수 있다.
또한 예를 들어, 상기 제2 레이저 다발(2720)의 최외곽 레이저 빔은 상기 제3 레이저 다발(2730)의 최외곽 레이저 빔과 평행하지 않을 수 있다. 상기 제2 레이저 다발(2720)의 최외곽 레이저 빔은 상기 제3 레이저 다발(2730)의 최외곽 레이저 빔과 평행하지 않기 때문에, 제2 레이저 다발(2720)과 제3 레이저 다발(2730)은 오버랩될 수 있다. 제2 레이저 다발(2720)과 제3 레이저 다발(2730)은 오버랩되기 때문에, 제2 빅셀 모듈(2703)과 제3 빅셀 모듈(2705) 사이에 레이저 빔이 조사되지 않는 데드존이 형성되지 않을 수 있다.
도 59 내지 도 60은 다른 일 실시예에 따른 라이다 장치를 나타내는 도면이다.
도 59 내지 도 60을 참조하면, 일 실시예에 따른 라이다 장치(2800)는 복수 개의 빅셀 모듈(2801, 2803, 2805)을 포함할 수 있다. 빅셀 모듈은 빅셀 어레이(2802, 2804, 2806)를 포함할 수 있다. 빅셀 어레이는 레이저 다발(2810, 2820, 2830)을 출력할 수 있다.
도 59을 참조하면, 일 실시예에 따른 빅셀 어레이(2802, 2804, 2806)는 빅셀 모듈(2801, 2803, 2805)의 내부에 배치될 수 있다. 빅셀 모듈(2801, 2803, 2805)의 내부에 배치된 빅셀 어레이(2802, 2804, 2806)는 빅셀 모듈(2801, 2803, 2805)의 내부를 향하는 방향으로 레이저 다발(2810, 2820, 2830)을 출력할 수 있다.
또한 일 실시예에 따른 빅셀 어레이(2802, 2804, 2806)는 빅셀 모듈(2801, 2803, 2805)의 내부에 배치되어 레이저 다발(2810, 2820, 2830)이 퍼지는 방향으로 레이저 빔을 출력할 수 있다.
일 실시예에 따른 라이다 장치(2800)는 제1 빅셀 모듈(2801), 제2 빅셀 모듈(2803) 및 제3 빅셀 모듈(2805)을 포함할 수 있다. 라이다 장치(2800)는 3개의 빅셀 모듈을 포함할 수 있으나, 1개, 2개, 4개, 5개, 6개 등의 경우도 가능하다.
일 실시예에 따른 제1 빅셀 모듈(2801)은 제1 빅셀 어레이(2802)를 포함할 수 있다. 제1 빅셀 어레이(2802)는 제1 레이저 다발(2810)을 출력할 수 있다. 제1 빅셀 어레이(2802)는 대상체를 향해 제1 레이저 다발(2810)을 출력할 수 있다. 제1 레이저 다발(2810)은 수직 FOV 및 수평 FOV를 형성할 수 있다. 제1 레이저 다발(2810)은 대상체로부터 반사되어 제1 빅셀 모듈(2801)의 수광부에 감지될 수 있다.
일 실시예에 따른 제2 빅셀 모듈(2803)은 제1 빅셀 어레이(2804)를 포함할 수 있다. 제2 빅셀 어레이(2804)는 제2 레이저 다발(2820)을 출력할 수 있다. 제2 빅셀 어레이(2804)는 대상체를 향해 제2 레이저 다발(2820)을 출력할 수 있다. 제2 레이저 다발(2820)은 수직 FOV 및 수평 FOV를 형성할 수 있다. 제2 레이저 다발(2820)은 대상체로부터 반사되어 제2 빅셀 모듈(2803)의 수광부에 감지될 수 있다.
일 실시예에 따른 제3 빅셀 모듈(2805)은 제3 빅셀 어레이(2806)를 포함할 수 있다. 제3 빅셀 어레이(2806)는 제3 레이저 다발(2830)을 출력할 수 있다. 제3 빅셀 어레이(2806)는 대상체를 향해 제3 레이저 다발(2830)을 출력할 수 있다. 제3 레이저 다발(2830)은 수직 FOV 및 수평 FOV를 형성할 수 있다. 제3 레이저 다발(2830)은 대상체로부터 반사되어 제3 빅셀 모듈(2805)의 수광부에 감지될 수 있다.
일 실시예에 따른 라이다 장치(2800)는 데드존을 형성하지 않을 수 있다.
예를 들어, 제1 레이저 다발(2710)과 제2 레이저 다발(2720)은 오버랩될 수 있다. 또한 예를 들어, 제2 레이저 다발(2720)과 제3 레이저 다발(2730)은 오버랩될 수 있다.
이때, 제1 레이저 다발(2710)과 제2 레이저 다발(2720)이 오버랩되고, 제2 레이저 다발(2720)과 제3 레이저 다발(2730)이 오버랩되기 때문에, 라이다 장치(2800)는 레이저 빔이 조사되지 않는 데드존을 형성하지 않을 수 있다.
도 60을 참조하면, 일 실시예에 따른 빅셀 어레이(2802, 2804, 2806)는 빅셀 모듈(2801, 2803, 2805)의 내부에 배치될 수 있다. 빅셀 모듈(2801, 2803, 2805)의 내부에 배치된 빅셀 어레이(2802, 2804, 2806)는 빅셀 모듈(2801, 2803, 2805)의 내부를 향하는 방향으로 레이저 다발(2810, 2820, 2830)을 출력할 수 있다.
또한 일 실시예에 따른 빅셀 어레이(2802, 2804, 2806)는 빅셀 모듈(2801, 2803, 2805)의 내부에 배치되어 레이저 다발(2810, 2820, 2830)이 모이는 방향으로 레이저 빔을 출력할 수 있다.
일 실시예에 따른 제1 빅셀 모듈(2801)은 제1 빅셀 어레이(2802)를 포함할 수 있다. 제1 빅셀 어레이(2802)는 제1 레이저 다발(2810)을 출력할 수 있다. 제1 빅셀 어레이(2802)는 대상체를 향해 제1 레이저 다발(2810)을 출력할 수 있다. 제1 레이저 다발(2810)은 수직 FOV 및 수평 FOV를 형성할 수 있다. 제1 레이저 다발(2810)은 대상체로부터 반사되어 제1 빅셀 모듈(2801)의 수광부에 감지될 수 있다.
일 실시예에 따른 제2 빅셀 모듈(2803)은 제1 빅셀 어레이(2804)를 포함할 수 있다. 제2 빅셀 어레이(2804)는 제2 레이저 다발(2820)을 출력할 수 있다. 제2 빅셀 어레이(2804)는 대상체를 향해 제2 레이저 다발(2820)을 출력할 수 있다. 제2 레이저 다발(2820)은 수직 FOV 및 수평 FOV를 형성할 수 있다. 제2 레이저 다발(2820)은 대상체로부터 반사되어 제2 빅셀 모듈(2803)의 수광부에 감지될 수 있다.
일 실시예에 따른 제3 빅셀 모듈(2805)은 제3 빅셀 어레이(2806)를 포함할 수 있다. 제3 빅셀 어레이(2806)는 제3 레이저 다발(2830)을 출력할 수 있다. 제3 빅셀 어레이(2806)는 대상체를 향해 제3 레이저 다발(2830)을 출력할 수 있다. 제3 레이저 다발(2830)은 수직 FOV 및 수평 FOV를 형성할 수 있다. 제3 레이저 다발(2830)은 대상체로부터 반사되어 제3 빅셀 모듈(2805)의 수광부에 감지될 수 있다.
일 실시예에 따른 라이다 장치(2800)는 데드존을 형성하지 않을 수 있다.
예를 들어, 제1 레이저 다발(2710)과 제2 레이저 다발(2720)은 오버랩될 수 있다. 또한 예를 들어, 제2 레이저 다발(2720)과 제3 레이저 다발(2730)은 오버랩될 수 있다.
이때, 제1 레이저 다발(2710)과 제2 레이저 다발(2720)이 오버랩되고, 제2 레이저 다발(2720)과 제3 레이저 다발(2730)이 오버랩되기 때문에, 라이다 장치(2800)는 레이저 빔이 조사되지 않는 데드존을 형성하지 않을 수 있다.
이하에서는 본 출원의 일 실시예에 빅셀 이미터에 대해 설명한다.
도 61은 일 실시예에 따른 빅셀 이미터의 단면도를 나타내는 도면이다. 도 61의 빅셀 이미터는 도 3의 빅셀 이미터와 동일할 수 있다. 도 61은 도 3의 빅셀 이미터의 단면도를 나타낼 수 있다.
도 61을 참조하면, 일 실시예에 따른 빅셀 이미터(110)는 상부 메탈 컨택(10), 상부 DBR 레이어(20, upper Distributed Bragg reflector), active 레이어(40, quantum well), 하부 DBR 레이어(30, lower Distributed Bragg reflector), 기판(50, substrate) 및 산화 영역(70, oxidation region)을 포함할 수 있다.
또한, 일 실시예에 따른 빅셀 이미터(110)는 상단 표면에서 수직으로 레이저 빔을 방출할 수 있다. 예를 들어, 빅셀 이미터(110)는 상부 메탈 컨택(10)의 표면에서 수직으로 레이저 빔을 방출할 수 있다. 또한, 예를 들어, 빅셀 이미터(110)는 acvite 레이어(40)에 수직으로 레이저 빔을 방출할 수 있다.
빅셀 이미터(110)에 대한 내용은 도 3의 빅셀 이미터의 내용과 중복될 수 있어, 자세한 내용은 생략한다.
도 62는 다른 일 실시예에 따른 빅셀 이미터를 나타내는 도면이다.
도 62를 참조하면, 일 실시예에 따른 빅셀 이미터(3000)는 상부 메탈 컨택(3010), 상부 DBR 레이어(3020, upper Distributed Bragg reflector), 하부 DBR 레이어(3030, lower Distributed Bragg reflector), 활성 레이어(3040, quantum well), 기판(3050, substrate), 하부 메탈 컨택(3060) 및 리플렉터(3070, reflector)를 포함할 수 있다.
일 실시예에 따른 빅셀 이미터(3000)는 상단 표면에서 수직으로 레이저 빔을 방출할 수 있다. 예를 들어, 빅셀 이미터(3000)는 상부 메탈 컨택(3010)의 표면에서 수직으로 레이저 빔을 방출할 수 있다. 또한, 예를 들어, 빅셀 이미터(3000)는 활성 레이어(3040)에 수직으로 레이저 빔을 방출할 수 있다.
일 실시예에 따른 빅셀 이미터(3000)는 다양한 파장의 레이저 빔을 출사할 수 있다. 예를 들어, 빅셀 이미터(3000)는 파장이 905nm인 레이저 빔을 출사할 수 있다. 또한 예를 들어, 빅셀 이미터(3000)는 1550nm의 파장을 갖는 레이저 빔을 출사할 수 있다.
또한 일 실시예에 따른 빅셀 이미터(3000)는 출력되는 파장이 주변 환경에 의해 변화될 수 있다. 예를 들어, 빅셀 이미터(3000)는 주변 환경의 온도가 증가할수록, 출력되는 파장도 증가할 수 있다. 또는 예를 들어, 빅셀 이미터(3000)는 주변 환경의 온도가 감소할수록, 출력되는 파장도 감소할 수 있다. 상기 주변 환경이란, 온도, 습도, 압력, 먼지의 농도, 주변 광량, 고도, 중력, 가속도 등을 포함할 수 있으나, 이에 한정되지 않는다.
빅셀 이미터(3000)는 본 발명의 설명에서 빅셀로 표현될 수 있다.
빅셀 유닛은 복수 개의 빅셀 이미터(3000)를 포함할 수 있다. 또한, 빅셀 어레이는 복수 개의 빅셀 유닛을 포함할 수 있다.
일 실시예에 따르면, 빅셀 이미터(3000)는 상부 DBR 레이어(3020) 및 하부 DBR 레이어(3030)를 포함할 수 있다.
상부 DBR 레이어(3020)는 본 발명의 설명에서 상부 DBR 층, 상부 DBR layer, 상부 반사층, 반사층 또는 제1 반사층으로 표현될 수 있으나, 이에 한정되지 않는다.
일 실시예에 따르면, 상부 DBR 레이어(3020)는 복수 개의 반사층으로 이루어질 수 있다. 예를 들어, 복수 개의 반사층은 반사율이 높은 반사층과 반사율이 낮은 반사층이 교대로 배치될 수 있다. 이때, 복수 개의 반사층의 두께는 빅셀 이미터(3000)에서 방출되는 레이저 파장의 4분의 1일 수 있다.
또한 일 실시예에 따르면, 상부 DBR 레이어(3020)는 p형 또는 n형으로 도핑될 수 있다. 예를 들어, 상부 DBR 레이어(3020)가 p형으로 도핑되는 경우, 하부 DBR 레이어(3030)는 n형으로 도핑된다. 또한 예를 들어, 상부 DBR 레이어(3020)가 n형으로 도핑되는 경우, 하부 DBR 레이어(3030)는 p형으로 도핑된다.
하부 DBR 레이어(3030)는 본 발명의 설명에서 하부 DBR 층, 하부 DBR layer, 하부 반사층, 반사층 또는 제2 반사층으로 표현될 수 있으나, 이에 한정되지 않는다.
일 실시예에 따르면, 하부 DBR 레이어(3030)는 복수 개의 반사층으로 이루어질 수 있다. 예를 들어, 복수 개의 반사층은 반사율이 높은 반사층과 반사율이 낮은 반사층이 교대로 배치될 수 있다. 이때, 복수 개의 반사층의 두께는 빅셀 이미터(3000)에서 방출되는 레이저 파장의 4분의 1일 수 있다.
또한 일 실시예에 따르면, 하부 DBR 레이어(3030)는 p형 또는 n형으로 도핑될 수 있다. 예를 들어, 하부 DBR 레이어(3030)가 p형으로 도핑되는 경우, 상부 DBR 레이어(3020)는 n형으로 도핑된다. 또한 예를 들어, 하부 DBR 레이어(3030)가 n형으로 도핑되는 경우, 상부 DBR 레이어(3020)는 p형으로 도핑된다.
일 실시예에 따르면, 빅셀 이미터(3000)는 활성 레이어(3040) 를 포함할 수 있다.
활성 레이어(3040)는 본 발명의 설명에서 활성층, 활성 layer, active layer 또는 액티브 레이어로 표현될 수 있으나, 이에 한정되지 않는다.
일 실시예에 따르면, 활성 레이어(3040)는 상부 DBR 레이어(3020) 및 하부 DBR 레이어(3030) 사이에 배치될 수 있다.
일 실시예에 따르면, 활성 레이어(3040)는 레이저 빔을 생성하는 복수 개의 퀀텀 웰(Quantum well)을 포함할 수 있다. 또한, 활성 레이어(3040)는 레이저 빔을 방출시킬 수 있다.
또한 일 실시예에 따르면, 활성 레이어(3040)는 산화 영역(oxidation region)을 포함할 수 있다. 또는 산화 영역은 활성 레이어(3040)의 상부에 위치할 수 있다.
이때, 산화 영역은 절연성을 띌 수 있다. 산화 영역은 전기의 흐름을 제한하거나 또는 산화 영역에는 전기가 흐르지 않을 수 있다.
또한, 산화 영역은 활성 레이어(3040)의 가장자리에 존재할 수 있다. 예를 들어, 산화 영역은 활성 레이어(3040)의 중앙 부분에는 배치되지 않을 수 있다. 이때, 산화 영역이 활성 레이어(3040)의 중앙 부분에 배치되지 않고 가장자리에 배치되어, 활성 레이어(3040)에서 방출되는 레이저 빔이 중앙 부분으로 방출될 수 있다. 또한, 산화 영역에 의해 활성 레이어(3040) 내의 광자가 중앙 부분에 모여 레이저 빔이 활성 레이어(3040)의 중앙 부분으로 방출될 수 있다.
이때, 산화 영역은 빅셀 이미터(3000)의 어퍼쳐(aperture) 역할을 할 수 있다. 구체적으로, 산화 영역은 절연성을 띄므로, 산화 영역이 아닌 부분에서만 활성 레이어(3040)로부터 생성된 레이저 빔이 방출될 수 있다.
일 실시예에 따르면, 빅셀 이미터(3000)는 외부 전원 등과의 전기적 연결을 위해 메탈 컨택을 포함할 수 있다. 예를 들어 빅셀 이미터(3000)는 상부 메탈 컨택(2010) 및 하부 메탈 컨택(3060)을 포함할 수 있다.
또한 일 실시예에 따르면, 빅셀 이미터(3000)는 메탈 컨택을 통해 상부 DBR 레이어(3020) 및 하부 DBR 레이어(3030)와 전기적으로 연결될 수 있다.
예를 들어, 상부 DBR 레이어(3020)가 p형으로 도핑되고 하부 DBR 레이어(3030)가 n형으로 도핑되는 경우, 상부 메탈 컨택(3010)에는 p형 전원이 공급되어 상부 DBR 레이어(3020)와 전기적으로 연결되고, 하부 메탈 컨택(3060)에는 n형 전원이 공급되어 하부 DBR 레이어(3030)와 전기적으로 연결될 수 있다.
또한 예를 들어, 상부 DBR 레이어(3020)가 n형으로 도핑되고 하부 DBR 레이어(3030)가 p형으로 도핑되는 경우, 상부 메탈 컨택(3010)에는 n형 전원이 공급되어 상부 DBR 레이어(3020)와 전기적으로 연결되고, 하부 메탈 컨택(3060)에는 p형 전원이 공급되어 하부 DBR 레이어(3030)와 전기적으로 연결될 수 있다.
상부 메탈 컨택(3010) 및 하부 메탈 컨택(3060)은 티타늄(Ti), 크롬(Cr) 니켈(Ni) 또는 이들의 조합으로 이루어질 수 있으나, 이에 한정되지 않는다.
예를 들어, 상부 메탈 컨택(3010) 또는 하부 메탈 컨택(3060)이 티타늄으로 이루어진 경우, 상부 메탈 컨택(3010) 또는 하부 메탈 컨택(3060)의 반사율은 54.6% 일 수 있으나, 이에 한정되지 않는다.
또한 예를 들어, 상부 메탈 컨택(3010) 또는 하부 메탈 컨택(3060)이 크롬으로 이루어진 경우, 상부 메탈 컨택(3010) 또는 하부 메탈 컨택(3060)의 반사율은 57.5% 일 수 있으나, 이에 한정되지 않는다.
또한 예를 들어, 상부 메탈 컨택(3010) 또는 하부 메탈 컨택(3060)이 니켈로 이루어진 경우, 상부 메탈 컨택(3010) 또는 하부 메탈 컨택(3060)의 반사율은 70.5% 일 수 있으나, 이에 한정되지 않는다.
일 실시예에 따르면 상부 메탈 컨택(3010)의 두께는 2nm이하일 수 있으나, 이에 한정되지 않는다.
또한, 빅셀 이미터(3000)는 리플렉터(3070)를 포함할 수 있다. 예를 들어, 빅셀 이미터(3000)는 상부 메탈 컨택(3010)의 상부에 배치되는 리플렉터(3070)를 포함할 수 있다.
일 실시예에 따르면, 리플렉터(3070)는 상부 메탈 컨택(3010)에서 출력되는 레이저 빔을 반사시킬 수 있다. 예를 들어, 리플렉터(3070)는 상부 메탈 컨택(3010)에서 출력되는 레이저 빔을 다시 상부 메탈 컨택(3010)으로 반사시킬 수 있다. 또한 예를 들어, 리플렉터(3070)는 활성 레이어(3040)에서 출력되어 상부 DBR 레이어(3020)를 거쳐 상부 메탈 컨택(3010)으로 흡수된 레이저 빔을 반사시킬 수 있다. 그러므로 리플렉터(3070)는 빅셀 이미터(3000)의 상부 메탈 컨택(3010)에 의해 흡수되는 레이저 빔을 반사시켜 빅셀 이미터(3000)의 광 출력 효율을 향상시킬 수 있다.
또한 일 실시예에 따르면, 리플렉터(3070)는 상부 메탈 컨택(3010)과 마주하는 제1 면을 가질 수 있다. 제1 면은 상부 메탈 컨택(3010)과 인접할 수도 있고, 이격될 수도 있다.
리플렉터(3070)의 제1 면은 평평한 면일 수도 있고, 곡선으로 이루어진 면일 수도 있고 또는 기울기를 가지는 경사면일 수도 있다.
예를 들어, 리플렉터(3070)의 제1 면이 평평한 면일 경우, 리플렉터(3070)와 상부 메탈 컨택(3010)은 제1 면을 공유하여 인접하는 형태일 수 있으나, 이에 한정되지 않는다.
또한 예를 들어, 리플렉터(3070)의 제1 면이 곡선으로 이루어진 면일 경우, 제1 면은 빅셀 이미터(3000)의 중앙 부분을 향하도록 휘어진 형태일 수 있으나, 이에 한정되지 않는다.
또한 예를 들어, 리플렉터(3070)의 제1 면이 기울기를 가지는 경사면일 경우, 제1 면은 빅셀 이미터(3000)의 중앙 부분을 향하도록 기울어진 형태일 수 있으나, 이에 한정되지 않는다.
일 실시예에 따르면, 리플렉터(3070)는 은(Ag), 알루미늄(Al) 또는 이들의 조합으로 이루어질 수 있으나, 이에 한정되지 않는다.
예를 들어, 리플렉터(3070)가 은으로 이루어진 경우, 리플렉터(3070)의 반사율은 99%일 수 있으나, 이에 한정되지 않는다.
또한 예를 들어, 리플렉터(3070)가 알루미늄으로 이루어진 경우, 리플렉터(3070)의 반사율은 90.7%일 수 있으나, 이에 한정되지 않는다.
일 실시예에 따르면, 리플렉터(3070)의 반사율은 상부 메탈 컨택(3010)의 반사율보다 클 수 있다. 예를 들어, 리플렉터(3070)의 제1 면의 반사율은 상부 메탈 컨택(3010)의 반사율보다 클 수 있다.
예를 들어, 상부 메탈 컨택(3010)의 반사율은 54.6%(Ti), 57.5%(Cr) 또는 70.5%(Ni)이고, 리플렉터(3070)의 반사율은 99%(Ag) 또는 90.7%(Al)이어서, 리플렉터(3070)의 반사율은 상부 메탈 컨택(3010)의 반사율보다 클 수 있으나, 이에 한정되지 않는다.
또한 예를 들어, 상부 메탈 컨택(3010)이티타늄으로 이루어지고, 상부 메탈 컨택(3010)의 두께가 2nm 이하이고, 리플렉터(3070)가 은으로 이루어진 경우, 940nm 파장의 빛에 대하여 리플렉터(3070)의 반사율은 90% 이상일 수 있으나, 이에 한정되지 않는다.
도 63은 다른 일 실시예에 따른 빅셀 이미터의 단면도를 나타내는 도면이다.
도 63을 참조하면, 일 실시예에 따른 빅셀 이미터(3000)는 상부 메탈 컨택(3010), 상부 DBR 레이어(3020, upper Distributed Bragg reflector), 하부 DBR 레이어(3030, lower Distributed Bragg reflector), 활성 레이어(3040, quantum well), 산화 영역(3045, oxidation region), 기판(3050, substrate), 하부 메탈 컨택(3060) 및 리플렉터(3070, reflector)를 포함할 수 있다.
일 실시예에 따르면, 빅셀 이미터(3000)의 리플렉터(3070)는 상부 메탈 컨택(3010)과 마주하는 제1 면(3075)을 포함할 수 있다. 이때, 제1 면(3075)은 평평한 형태일 수도 있고, 곡면을 포함할 수도 있다.
일 실시예에 따르면, 빅셀 이미터(3000)의 리플렉터(3070)는 상부 메탈 컨택(3010)으로부터 방출되는 빛을 다시 반사시킬 수 있다. 예를 들어, 리플레터(3070)는 활성 레이어(3040)로부터 상부 메탈 컨택(3010) 방향으로 향하는 빛을 다시 활성 레이어(3040)를 향하도록 반사시킬 수 있다. 리플렉터(3070)에 의해 반사된 빛은 다시 상부 DBR 레이어 또는 하부 DBR 레이어에서 반사되어 상부 메탈 컨택(3010) 사이에 존재하는 개구를 통해 외부로 방출될 수 있다.
리플렉터(3070)는 상부 메탈 컨택(3010)으로부터 방출되는 빛을 다시 반사시킴으로써, 빅셀 이미터(3000)의 레이저 빔 방출 효율을 증가시킬 수 있다. 리플렉터(3070)는 상부 메탈 컨택(3010)으로부터 방출되는 빛을 다시 반사시킴으로써, 빅셀 이미터(3000)의 개구를 통해 출력되는 빛의 양을 증가시킬 수 있다.
일 실시예에 따르면, 빅셀 이미터(3000)의 리플렉터(3070)는 상부 메탈 컨택(3010)과 맞닿는 제1 면(3075)을 포함할 수 있다. 이때, 제1 면(3075)의 길이가 상부 메탈 컨택(3010)의 길이보다 길면, 제1 면(3075)이 활성 레이어(3040)로부터 출력되는 레이저 빔의 면적 및 출력 효율을 감소시킬 수 있기 때문에, 제1 면(3075)의 길이는 상부 메탈 컨택(3010)의 길이와 같거나 그 이하일 수 있다.
또한 일 실시예에 따르면, 빅셀 이미터(3000)의 리플렉터(3070)의 제1 면(3075)은 활성 레이어(3040)로부터 출력되는 레이저 빔을 직접적으로 반사시키지 않을 수 있다. 활성 레이어(3040)로부터 출력되는 레이저 빔을 직접적으로 반사시키는 경우, 제1 면(3075)이 활성 레이어(3040)로부터 출력되는 레이저 빔의 면적 및 출력 효율을 감소시킬 수 있기 때문에, 활성 레이어(3040)로부터 출력되는 레이저 빔은 제1 면(3075)에 직접적으로 입사되지 않을 수 있다.
도 64는 또 다른 일 실시예에 따른 빅셀 이미터의 단면도를 나타내는 도면이다.
도 64를 참조하면, 일 실시예에 따른 빅셀 이미터(3300)는 상부 메탈 컨택(3310), 상부 DBR 레이어(3320, upper Distributed Bragg reflector), 하부 DBR 레이어(3330, lower Distributed Bragg reflector), 활성 레이어(3340, quantum well), 산화 영역(3345, oxidation region), 기판(3350, substrate), 하부 메탈 컨택(3360) 및 리플렉터(3370, 3380 reflector)를 포함할 수 있다.
상부 메탈 컨택(3310), 상부 DBR 레이어(3320, upper Distributed Bragg reflector), 하부 DBR 레이어(3330, lower Distributed Bragg reflector), 활성 레이어(3340, quantum well), 산화 영역(3345, oxidation region), 기판(3350, substrate), 하부 메탈 컨택(3360) 및 리플렉터(3370, reflector)에 대한 설명은 도 63의 상부 메탈 컨택(3010), 상부 DBR 레이어(3020, upper Distributed Bragg reflector), 하부 DBR 레이어(3030, lower Distributed Bragg reflector), 활성 레이어(3040, quantum well), 산화 영역(3045, oxidation region), 기판(3050, substrate), 하부 메탈 컨택(3060) 및 리플렉터(3070, reflector)의 설명과 중복될 수 있어, 자세한 설명은 생략한다.
빅셀 이미터(3300)는 복수의 리플렉터를 포함할 수 있다. 예를 들어, 빅셀 이미터(3300)는 제1 리플렉터(3370) 및 제2 리플렉터(3380)를 포함할 수 있다.
제1 리플렉터(3370)는 상부 메탈 컨택(3310)과 마주하는 제1 면(3375)을 가질 수 있다. 제1 면(3375)는 상부 메탈 컨택(3310)과 인접할 수도 있고, 이격될 수도 있다.
제2 리플렉터(3380)는 제1 리플렉터(3370)와 마주하는 제2 면(3385)을 가질 수 있다. 제2 면(3385)은 제1 리플렉터(3370)와 인접할 수도 있고, 이격될 수도 있다.
제1 리플렉터(3370)의 제1 면(3375) 및 제2 리플렉터(3380)의 제2 면(3385)은 평평한 면일 수도 있고, 곡선으로 이루어진 면일 수도 있고 또는 기울기를 가지는 경사면일 수도 있다.
제1 면(3375) 및 제2 면(3385)에 대한 내용은 빅셀 이미터(3000)의 제1 면(3075)와 중복될 수 있어, 자세한 내용은 생략한다.
도 65는 일 실시예에 따른 상부 메탈 컨택 및 리플렉터를 나타내는 도면이다.
도 65를 참조하면, 리플렉터(3070)는 상부 메탈 컨택(3010)과 마주하는 제1 면(3075)을 포함할 수 있다. 제1 면의 형상에 따라 DBR 레이어에서 광자가 반사되는 횟수 및 반사 정도가 달라질 수 있다.
일 실시예에 따르면, 제1 면(3075)은 상부 메탈 컨택(3010)에 흡수되는 레이저 빔을 반사시킬 수 있다. 또한, 제1 면(3075)은 상부 메탈 컨택(3010)을 거쳐 출력되는 레이저 빔을 반사시킬 수 있다.
예를 들어, 제1 면(3075)은 상부 메탈 컨택(3010)을 거쳐 제1 면(3075)에 수직으로 입사되는 레이저 빔을 다시 제1 면(3075)에 수직으로 반사시킬 수 있다.
또한 예를 들어, 제1 면(3075)은 상부 메탈 컨택(3010)을 거쳐 제1 면(3075)에 입사각 θ를 가지고 입사되는 레이저 빔을 다시 반사각 θ를 가지도록 반사시킬 수 있다.
도 66은 다른 일 실시예에 따른 빅셀 이미터의 단면도를 나타내는 도면이다.
도 66을 참조하면, 다른 일 실시예에 따른 빅셀 이미터(3100)는 상부 메탈 컨택(3110), 상부 DBR 레이어(3120, upper Distributed Bragg reflector), 하부 DBR 레이어(3130, lower Distributed Bragg reflector), 활성 레이어(3140, quantum well), 산화 영역(3145, oxidation region), 기판(3150, substrate), 하부 메탈 컨택(3160) 및 리플렉터(3170, reflector)를 포함할 수 있다.
빅셀 이미터(3100)의 상부 메탈 컨택(3110)은 도 62의 빅셀 이미터(3000)의 상부 메탈 컨택(3010)과 동일할 수 있으므로, 자세한 설명은 생략한다.
빅셀 이미터(3100)의 상부 DBR 레이어(3120)는 도 62의 빅셀 이미터(3000)의 상부 DBR 레이어(3020)와 동일할 수 있으므로, 자세한 설명은 생략한다.
빅셀 이미터(3100)의 하부 DBR 레이어(3130)는 도 62의 빅셀 이미터(3000)의 하부 DBR 레이어(3030)와 동일할 수 있으므로, 자세한 설명은 생략한다.
빅셀 이미터(3100)의 활성 레이어(3140)는 도 62의 빅셀 이미터(3000)의 활성 레이어(3040)와 동일할 수 있으므로, 자세한 설명은 생략한다.
빅셀 이미터(3100)의 산화 영역(3145)은 도 62의 빅셀 이미터(3000)의 산화 영역(3045)과 동일할 수 있으므로, 자세한 설명은 생략한다.
빅셀 이미터(3100)의 기판(3150)은 도 62의 빅셀 이미터(3000)의 기판(3050)과 동일할 수 있으므로, 자세한 설명은 생략한다.
빅셀 이미터(3100)의 하부 메탈 컨택(3160)은 도 62의 빅셀 이미터(3000)의 하부 메탈 컨택(3060)과 동일할 수 있으므로, 자세한 설명은 생략한다.
빅셀 이미터(3100)의 리플렉터(3170)는 도 62의 빅셀 이미터(3000)의 리플렉터(3070)와 동일할 수 있으므로, 자세한 설명은 생략한다.
일 실시예에 따르면, 빅셀 이미터(3100)의 리플렉터(3170)는 상부 메탈 컨택(3110)과 마주하는 제1 면(3175)을 포함할 수 있다. 이때, 제1 면(3175)은 곡선으로 이루어진 면일 수 있다.
일 실시예에 따르면, 빅셀 이미터(3100)의 리플렉터(3170)의 길이가 상부 메탈 컨택(3110)의 길이보다 길면, 리플렉터(3170)가 활성 레이어(3140)로부터 출력되는 레이저 빔의 면적 및 출력 효율을 감소시킬 수 있기 때문에, 리플렉터(3170)의 길이는 상부 메탈 컨택(3110)의 길이와 같거나 그 이하일 수 있다.
또한 일 실시예에 따르면, 빅셀 이미터(3100)의 리플렉터(3170)의 제1 면(3175)은 활성 레이어(3140)로부터 출력되는 레이저 빔을 직접적으로 반사시키지 않을 수 있다. 활성 레이어(3140)로부터 출력되는 레이저 빔을 직접적으로 반사시키는 경우, 제1 면(3175)이 활성 레이어(3140)로부터 출력되는 레이저 빔의 면적 및 출력 효율을 감소시킬 수 있기 때문에, 활성 레이어(3140)로부터 출력되는 레이저 빔은 제1 면(3175)에 직접적으로 입사되지 않을 수 있다.
도 67은 다른 일 실시예에 따른 상부 메탈 컨택 및 리플렉터를 나타내는 도면이다.
도 67을 참조하면, 리플렉터(3170)는 상부 메탈 컨택(3110)과 마주하는 제1 면(3175)을 포함할 수 있다.
일 실시예에 따르면, 제1 면(3175)은 상부 메탈 컨택(3110)에 흡수되는 레이저 빔을 반사시킬 수 있다. 또한, 제1 면(3175)은 상부 메탈 컨택(3110)을 거쳐 출력되는 레이저 빔을 반사시킬 수 있다.
이때, 제1 면(3175)은 곡선으로 이루어져있기 때문에, 상부 메탈 컨택(3110)을 거쳐 제1 면(3175)으로 입사되는 레이저 빔은 제1 면(3175)에 의해 빅셀 이미터(3110)의 중앙 부분을 향하는 방향으로 반사될 수 있다. 제1 면(3175)에 의해 반사된 레이저 빔이 빅셀 이미터(3110)의 중앙 부분을 향하기 때문에, 빅셀 이미터(3110)의 광 손실이 감소되고, 광 출력 효율이 향상될 수 있다.
도 68은 또 다른 일 실시예에 따른 빅셀 이미터의 단면도를 나타내는 도면이다.
도 68을 참조하면, 또 다른 일 실시예에 따른 빅셀 이미터(3200)는 상부 메탈 컨택(3210), 상부 DBR 레이어(3220, upper Distributed Bragg reflector), 하부 DBR 레이어(3230, lower Distributed Bragg reflector), 활성 레이어(3240, quantum well), 산화 영역(3245, oxidation region), 기판(3250, substrate), 하부 메탈 컨택(3260) 및 리플렉터(3270, reflector)를 포함할 수 있다.
빅셀 이미터(3200)의 상부 메탈 컨택(3210)은 도 62의 빅셀 이미터(3000)의 상부 메탈 컨택(3010)과 동일할 수 있으므로, 자세한 설명은 생략한다.
빅셀 이미터(3200)의 상부 DBR 레이어(3220)는 도 62의 빅셀 이미터(3000)의 상부 DBR 레이어(3020)와 동일할 수 있으므로, 자세한 설명은 생략한다.
빅셀 이미터(3200)의 하부 DBR 레이어(3230)는 도 62의 빅셀 이미터(3000)의 하부 DBR 레이어(3030)와 동일할 수 있으므로, 자세한 설명은 생략한다.
빅셀 이미터(3200)의 활성 레이어(3240)는 도 62의 빅셀 이미터(3000)의 활성 레이어(3040)와 동일할 수 있으므로, 자세한 설명은 생략한다.
빅셀 이미터(3200)의 산화 영역(3245)은 도 62의 빅셀 이미터(3000)의 산화 영역(3045)과 동일할 수 있으므로, 자세한 설명은 생략한다.
빅셀 이미터(3200)의 기판(3250)은 도 62의 빅셀 이미터(3000)의 기판(3050)과 동일할 수 있으므로, 자세한 설명은 생략한다.
빅셀 이미터(3200)의 하부 메탈 컨택(3260)은 도 62의 빅셀 이미터(3000)의 하부 메탈 컨택(3060)과 동일할 수 있으므로, 자세한 설명은 생략한다.
빅셀 이미터(3200)의 리플렉터(3270)는 도 62의 빅셀 이미터(3000)의 리플렉터(3070)와 동일할 수 있으므로, 자세한 설명은 생략한다.
일 실시예에 따르면, 빅셀 이미터(3200)의 리플렉터(3270)는 상부 메탈 컨택(3210)과 마주하는 제1 면(3275)을 포함할 수 있다. 이때, 제1 면(3275)은 기울기를 가지는 경사면일 수 있다.
일 실시예에 따르면, 빅셀 이미터(3200)의 리플렉터(3270)의 길이가 상부 메탈 컨택(3210)의 길이보다 길면, 리플렉터(3270)가 활성 레이어(3240)로부터 출력되는 레이저 빔의 면적 및 출력 효율을 감소시킬 수 있기 때문에, 리플렉터(3270)의 길이는 상부 메탈 컨택(3210)의 길이와 같거나 그 이하일 수 있다.
또한 일 실시예에 따르면, 빅셀 이미터(3200)의 리플렉터(3270)의 제1 면(3275)은 활성 레이어(3240)로부터 출력되는 레이저 빔을 직접적으로 반사시키지 않을 수 있다. 활성 레이어(3240)로부터 출력되는 레이저 빔을 직접적으로 반사시키는 경우, 제1 면(3275)이 활성 레이어(3240)로부터 출력되는 레이저 빔의 면적 및 출력 효율을 감소시킬 수 있기 때문에, 활성 레이어(3240)로부터 출력되는 레이저 빔은 제1 면(3275)에 직접적으로 입사되지 않을 수 있다.
도 69는 또 다른 일 실시예에 따른 상부 메탈 컨택 및 리플렉터를 나타내는 도면이다.
도 69를 참조하면, 리플렉터(3270)는 상부 메탈 컨택(3210)과 마주하는 제1 면(3275)을 포함할 수 있다.
일 실시예에 따르면, 제1 면(3275)은 상부 메탈 컨택(3210)에 흡수되는 레이저 빔을 반사시킬 수 있다. 또한, 제1 면(3275)은 상부 메탈 컨택(3210)을 거쳐 출력되는 레이저 빔을 반사시킬 수 있다.
이때, 제1 면(3275)은 기울기를 가지는 경사면이기 때문에, 상부 메탈 컨택(3210)을 거쳐 제1 면(3275)으로 입사되는 레이저 빔은 제1 면(3275)에 의해 빅셀 이미터(3210)의 중앙 부분을 향하는 방향으로 반사될 수 있다. 제1 면(3275)에 의해 반사된 레이저 빔이 빅셀 이미터(3210)의 중앙 부분을 향하기 때문에, 빅셀 이미터(3210)의 광 손실이 감소되고, 광 출력 효율이 향상될 수 있다.
도 70은 일 실시예에 따른 바텀 이미팅 빅셀 이미터의 단면도를 나타내는 도면이다.
도 70을 참조하면, 일 실시예에 따른 바텀 이미팅(Bottom-emitting) 빅셀 이미터(3400)는 제1 메탈 컨택(3410), 제1 DBR 레이어(3420), 산화 영역(3430), 활성 레이어(3440), 제2 DBR 레이어(3450), 기판(3460) 및 제2 메탈 컨택(3470)을 포함할 수 있다.
또한, 일 실시예에 따른 빅셀 이미터(3400)는 하단 표면에서 수직으로 레이저 빔을 방출할 수 있다. 예를 들어, 빅셀 이미터(3400)는 제2 메탈 컨택(3470)의 표면과 수직인 방향으로 레이저 빔을 방출할 수 있다. 또한 예를 들어, 빅셀 이미터(3400)는 활성 레이어(3440)에 수직으로 레이저 빔을 방출할 수 있다.
일 실시예에 따른 빅셀 이미터(3400)는 제1 DBR 레이어(3420) 및 제2 DBR 레이어(3430)를 포함할 수 있다.
제1 DBR 레이어(3420) 및 제2 DBR 레이어(3430)에 대한 설명은 도 3의 빅셀 이미터(110)의 상부 DBR 레이어(20) 및 하부 DBR 레이어(30)에 대한 설명과 중복될 수 있어, 자세한 설명은 생략한다.
일 실시예에 따른 제1 DBR 레이어(3420)는 p형으로 도핑되고, 제2 DBR 레이어(3450)는 n형으로 도핑될 수 있다. 또는 제1 DBR 레이어(3420)는 n형으로 도핑되고, 제2 DBR 레이어(3450)는 p형으로 도핑될 수 있다.
이때, 제1 메탈 컨택(3410)은 p형 메탈이고, 제2 메탈 컨택(3470)은 n형 메탈일 수 있다. 또는 제1 메탈 컨택(3410)은 n형 메탈이고, 제2 메탈 컨택(3470)은 p형 메탈일 수 있다.
산화 영역(3430), 활성 레이어(3440) 및 기판(3460)에 대한 설명은 도 3의 빅셀 이미터(110)의 산화 영역, 활성 레이어(40) 및 기판(50)에 대한 설명과 중복될 수 있어, 자세한 설명은 생략한다.
도 71은 다른 일 실시예에 따른 바텀 이미팅 빅셀 이미터의 단면도를 나타내는 도면이다.
도 71을 참조하면, 다른 일 실시예에 따른 바텀 이미팅 빅셀 이미터(3500)는 제1 메탈 컨택(3510), 제1 DBR 레이어(3520), 산화 영역(3530), 활성 레이어(3540), 제2 DBR 레이어(3550), 기판(3560), 제2 메탈 컨택(3570) 및 리플렉터(3580)를 포함할 수 있다.
또한, 일 실시예에 따른 빅셀 이미터(3500)는 하단 표면에서 수직으로 레이저 빔을 방출할 수 있다. 예를 들어, 빅셀 이미터(3500)는 제2 메탈 컨택(3570)의 표면과 수직인 방향으로 레이저 빔을 방출할 수 있다. 또한 예를 들어, 빅셀 이미터(3500)는 활성 레이어(3540)에 수직으로 레이저 빔을 방출할 수 있다.
제1 메탈 컨택(3510), 제1 DBR 레이어(3520), 산화 영역(3530), 활성 레이어(3540), 제2 DBR 레이어(3550), 기판(3560) 및 제2 메탈 컨택(3570)에 대한 설명은 도 70의 제1 메탈 컨택(3410), 제1 DBR 레이어(3420), 산화 영역(3430), 활성 레이어(3440), 제2 DBR 레이어(3450), 기판(3460) 및 제2 메탈 컨택(3470)에 대한 설명과 중복될 수 있어, 자세한 설명은 생략한다.
일 실시예에 따르면, 빅셀 이미터(3500)의 리플렉터(3580)는 제2 메탈 컨택(3580)과 마주하는 제1 면(3085)을 포함할 수 있다. 이때, 제1 면(3585)은 평평한 형태일 수도 있고, 곡면을 포함할 수도 있다.
일 실시예에 따르면, 빅셀 이미터(3500)의 리플렉터(3580)는 제2 메탈 컨택(3570)으로부터 방출되는 빛을 다시 반사시킬 수 있다. 예를 들어, 리플레터(3580)는 활성 레이어(3540)로부터 제2 메탈 컨택(3570) 방향으로 향하는 빛을 다시 활성 레이어(3540)를 향하도록 반사시킬 수 있다. 리플렉터(3580)에 의해 반사된 빛은 다시 제1 DBR 레이어 또는 제2 DBR 레이어에서 반사되어 제2 메탈 컨택(3570) 사이에 존재하는 개구를 통해 외부로 방출될 수 있다.
리플렉터(3580)는 제2 메탈 컨택(3570)으로부터 방출되는 빛을 다시 반사시킴으로써, 빅셀 이미터(3500)의 레이저 빔 방출 효율을 증가시킬 수 있다. 리플렉터(3580)는 제2 메탈 컨택(3570)으로부터 방출되는 빛을 다시 반사시킴으로써, 빅셀 이미터(3500)의 개구를 통해 출력되는 빛의 양을 증가시킬 수 있다.
일 실시예에 따르면, 빅셀 이미터(3500)의 리플렉터(3580)는 제2 메탈 컨택(3570)과 맞닿는 제1 면(3585)을 포함할 수 있다. 이때, 제1 면(3585)의 길이가 제2 메탈 컨택(3570)의 길이보다 길면, 제1 면(3585)이 활성 레이어(3540)로부터 출력되는 레이저 빔의 면적 및 출력 효율을 감소시킬 수 있기 때문에, 제1 면(3585)의 길이는 제2 메탈 컨택(3570)의 길이와 같거나 그 이하일 수 있다.
또한 일 실시예에 따르면, 빅셀 이미터(3500)의 리플렉터(3570)의 제1 면(3585)은 활성 레이어(3540)로부터 출력되는 레이저 빔을 직접적으로 반사시키지 않을 수 있다. 활성 레이어(3540)로부터 출력되는 레이저 빔을 직접적으로 반사시키는 경우, 제1 면(3585)이 활성 레이어(3540)로부터 출력되는 레이저 빔의 면적 및 출력 효율을 감소시킬 수 있기 때문에, 활성 레이어(3540)로부터 출력되는 레이저 빔은 제1 면(3585)에 직접적으로 입사되지 않을 수 있다.
이하에서는 본 출원의 일 실시예에 따른 빅셀 어레이에 대해 설명한다.
도 72는 일 실시예에 따른 빅셀 어레이를 설명하기 위한 도면이다.
도 72를 참조하면, 일 실시예에 따른 빅셀 어레이(4100)는 복수의 빅셀 유닛(4110)을 포함할 수 있다.
빅셀 어레이(4100)는 2D 어레이일 수 있다. 복수의 빅셀 유닛(4110)은 2차원으로 배열될 수 있다. 예를 들어, 복수의 빅셀 유닛(4110)은 제1 축을 기준으로 배열되고, 상기 제1 축과 다른 제2 축을 따라 배열될 수 있다. 예를 들어, 복수의 빅셀 유닛(4110)은 x축을 따라 배열되고, y축을 따라 배열되어 매트릭스(matrix) 형태를 나타낼 수 있다.
도 72는 4 X 4의 매트릭스 형태를 가지는 빅셀 어레이만을 도시하고 있으나, 빅셀 어레이의 형태는 이에 한정되지 않는다. 예를 들어, 빅셀 어레이는 5 X 5, 6 X 6, 7 X 7, 8 X 8, 9 X 9, 10 X 10, 11 X 11, 12 X 12, 13 X 13, 14 X 14, 15 X 15, 16 X 16 등의 매트릭스 형태가 될 수 있다. 또는 예를 들어, 빅셀 어레이는 N X M 의 매트릭스 형태가 될 수도 있다. 빅셀 어레이의 형태는 기재된 숫자에 한정되지 않고 다른 숫자로 이루어진 매트릭스 형태가 될 수 있다.
또한 예를 들어, 복수의 빅셀 유닛(4110)은 x축을 따라 배열되고, 상기 x축과 90도 이하의 각도를 이루는 제2 축을 따라 배열될 수 있다. 이때, 복수의 빅셀 어레이(4100)는 마름모꼴 또는 사다리꼴 형태를 나타낼 수 있다. 또한, 복수의 빅셀 어레이(4100)는 벌집구조(honeycomb)의 형태를 나타낼 수 있다.
빅셀 유닛(4110)은 복수의 빅셀 이미터를 포함할 수 있다. 예를 들어, 빅셀 유닛(4110)은 300개 내지 400개의 빅셀 이미터를 포함할 수 있다. 예를 들어, 빅셀 유닛(4110)은 원형 구조, 매트릭스 구조, 마름모 구조, 사다리꼴 구조 또는 벌집 구조로 배열된 복수의 빅셀 이미터를 포함할 수 있다.
일 실시예에 따른 빅셀 어레이(4100)는 복수의 컨택(4120, 4125, 4130, 4135)을 포함할 수 있다. 예를 들어, 빅셀 어레이(4100)는 상기 제1 축을 따라 배열된 빅셀 어레이의 양단과 이웃하여 배치되는 제1 컨택들(4120, 4125)을 포함할 수 있다. 또한 예를 들어, 빅셀 어레이(4100)는 상기 제2 축을 따라 배열된 빅셀 어레이의 양단과 이웃하여 배치되는 제2 컨택들(4130, 4135)을 포함할 수 있다.
다른 예를 들어, 빅셀 어레이(4100)는 상기 제1 축을 따라 배열된 빅셀 어레이의 일단과 이웃하게 배치되는 제1 컨택들(4120) 및 다른 일단과 이웃하게 배치되는 제2 컨택들(4125)을 포함할 수 있다. 또한 예를 들어, 빅셀 어레이(4100)는 상기 제2 축을 따라 배열된 빅셀 어레이의 일단과 이웃하게 배치되는 제3 컨택들(4130) 및 다른 일단과 이웃하게 배치되는 제4 컨택들(4135)을 포함할 수 있다.
일 실시예에 따른 상기 복수의 컨택(4120, 4125, 4130, 4135)은 전도성 물질을 포함할 수 있다. 예를 들어, 상기 복수의 컨택(4120, 4125, 4130, 4135)은 금속을 포함할 수 있다.
일 실시예에 따른 상기 복수의 컨택(4120, 4125, 4130, 4135)은 복수의 빅셀 유닛(4110)과 전기적으로 연결될 수 있다. 이때, 상기 복수의 컨택(4120, 4125, 4130, 4135)은 복수의 빅셀 유닛(4110)에 전원을 공급할 수 있다.
일 실시예에 따르면, 상기 복수의 컨택(4120, 4125, 4130, 4135)은 복수의 빅셀 유닛(4110)에 p형 전압 또는 n형 전압을 공급할 수 있다. 예를 들어, p형 전압은 전압원의 (+)단자에서 공급되는 전압이고, n형 전압은 전압원의 (-)단자에서 공급되는 전압일 수 있다. 또한 예를 들어, p형 전압은 일반적으로 p도핑체에 가하는 전압이고, n형 전압은 일반적으로 n도핑체에 가하는 전압일 수 있다.
예를 들어, 상기 제1 축을 따라 배열된 빅셀 어레이의 양단에 배열된 제1 컨택(4120, 4125)은 상기 복수의 빅셀 유닛(4110)의 하부 메탈 컨택(60)과 연결될 수 있다. 이때, 빅셀 유닛(4110)의 하부 메탈 컨택(60)에는 제1 컨택(4120, 4125)을 통하여 n형 전압이 인가될 수 있다.
또한 예를 들어, 상기 제2 축을 따라 배열된 빅셀 어레이의 양단에 배열된 제2 컨택들(4130, 4135)은 상기 복수의 빅셀 유닛(4110)의 상부 메탈 컨택(10)과 연결될 수 있다. 이때, 빅셀 유닛(4110)의 상부 메탈 컨택(10)에는 제2 컨택들(4120, 4125)을 통하여 p형 전압이 인가될 수 있다. 이때, 빅셀 유닛(4110)의 상부 메탈 컨택(10)에는 제2 컨택들(4120, 4125)을 통하여 기준 전압 이상의 전압이 인가될 수 있다.
다른 예를 들어, 상기 제1 축을 따라 배열된 빅셀 어레이의 양단에 배열된 제1 컨택들(4120, 4125)은 상기 복수의 빅셀 유닛(4110)의 상부 메탈 컨택(10)과 연결될 수 있다. 이때, 빅셀 유닛(4110)의 상부 메탈 컨택(10)에는 제1 컨택(4120, 4125)들을 통하여 p형 전압이 인가될 수 있다. 이때, 빅셀 유닛(4110)의 상부 메탈 컨택(10)에는 제1 컨택들(4120, 4125)을 통하여 기준 전압 이상의 전압이 인가될 수 있다.
또한 다른 예를 들어, 상기 제2 축을 따라 배열된 빅셀 어레이의 양단에 배열된 제2 컨택(4130, 4135)은 상기 복수의 빅셀 유닛(4110)의 하부 메탈 컨택(60)과 연결될 수 있다. 이때, 빅셀 유닛(4110)의 하부 메탈 컨택(60)에는 제2 컨택들(4120, 4125)을 통하여 n형 전압이 인가될 수 있다. 이때, 빅셀 유닛(4110)의 하부 메탈 컨택(60)에는 제2 컨택들(4120, 4125)을 통하여 기준 전압 이하의 전압이 인가될 수 있다.
일 실시예에 따른 빅셀 어레이(4110)는 복수의 와이어(4140, 4150)를 포함할 수 있다. 복수의 와이어(4140, 4150)는 전도성 물질을 포함할 수 있다. 예를 들어, 복수의 와이어(4140, 4150)는 금속을 포함할 수 있다.
일 실시예에 따른 복수의 와이어(4140)는 상기 제1 축을 따라 배열된 복수의 빅셀 유닛(4110)들을 서로 연결시키거나 빅셀 유닛(4110)과 제1 컨택(4120, 4125)을 전기적으로 연결시킬 수 있다. 또한 복수의 와이어(4150)는 상기 제2 축을 따라 배열된 복수의 빅셀 유닛(4110)들을 서로 연결시키거나 빅셀 유닛(4110)과 제2 컨택들(4130, 4135)을 전기적으로 연결시킬 수 있다.
도 72를 참조하면, 빅셀 어레이(4110)에 포함된 복수의 빅셀 유닛(4110)은 개별적으로 동작할 수 있다. 빅셀 어레이(4110)에 포함된 복수의 빅셀 유닛(4110)은 다른 빅셀 유닛의 동작 여부와 관계 없이 각각 독립적으로 동작될 수 있다.
예를 들어, 1행 1열의 빅셀 유닛을 동작시키기 위해서는 제1 컨택들(4120, 4125) 중 1행에 배치된 컨택에 n형 전압을, 제2 컨택들(4130, 4135) 중 1열에 배치된 컨택에 p형 전압을 인가할 수 있다.
예를 들어, 1행 1열의 빅셀 유닛을 동작시키기 위해서는 제1 컨택들(4120, 4125) 중 1행에 배치된 컨택에 기준 전압 이하의 전압을, 제2 컨택들(4130, 4135) 중 1열에 배치된 컨택에 기준 전압 이상의 전압을 인가할 수 있다.
또한 예를 들어, 1행 2열의 빅셀 유닛을 동작시키기 위해서는 제1 컨택들(4120, 4125) 중 1행에 배치된 컨택에 n형 전압을, 제2 컨택들(4130, 4135) 중 2열에 배치된 컨택에 p형 전압을 인가할 수 있다.
또한 예를 들어, 1행 2열의 빅셀 유닛을 동작시키기 위해서는 제1 컨택들(4120, 4125) 중 1행에 배치된 컨택에 기준 전압 이하의 전압을, 제2 컨택들(4130, 4135) 중 2열에 배치된 컨택에 기준 전압 이상의 전압을 인가할 수 있다.
또한 예를 들어, 1행에 배치된 4개의 빅셀 유닛을 모두 동작시키기 위해서는 제1 컨택들(4120, 4125) 중 1행에 배치된 컨택에 n형 전압을, 제2 컨택들(4130, 4135) 모두에 p형 전압을 인가할 수 있다.
또한 예를 들어, 1행에 배치된 4개의 빅셀 유닛을 모두 동작시키기 위해서는 제1 컨택들(4120, 4125) 중 1행에 배치된 컨택에 기준 전압 이하의 전압을, 제2 컨택들(4130, 4135) 모두에 기준 전압 이상의 전압을 인가할 수 있다.
또한 예를 들어, 2행 2열의 빅셀 유닛과 3행 4열의 빅셀 유닛을 동작시키기 위해서는 제1 컨택들(4120, 4125) 중 2행 및 3행에 배치된 컨택에 n형 전압을, 제2 컨택들(4130, 4135) 중 2열 및 4열에 배치된 컨택에 p형 전압을 인가할 수 있다.
또한 예를 들어, 2행 2열의 빅셀 유닛과 3행 4열의 빅셀 유닛을 동작시키기 위해서는 제1 컨택들(4120, 4125) 중 2행 및 3행에 배치된 컨택에 기준 전압 이하의 전압을, 제2 컨택들(4130, 4135) 중 2열 및 4열에 배치된 컨택에 기준 전압 이상의 전압을 인가할 수 있다.
또한 예를 들어, 빅셀 어레이(4100)에 포함된 모든 빅셀 유닛(4110)을 동작시키기 위해서는 제1 컨택들(4120, 4125) 모두에 n형 전압을, 제2 컨택들(4130, 4135) 모두에 p형 전압을 인가할 수 있다.
또한 예를 들어, 빅셀 어레이(4100)에 포함된 모든 빅셀 유닛(4110)을 동작시키기 위해서는 제1 컨택들(4120, 4125) 모두에 기준 전압 이하의 전압을, 제2 컨택들(4130, 4135) 모두에 기준 전압 이상의 전압을 인가할 수 있다.
도 73은 다른 일 실시예에 따른 빅셀 어레이를 설명하기 위한 도면이다.
도 73을 참조하면, 다른 일 실시예에 따른 빅셀 어레이(4200)는 복수의 빅셀 유닛(4210)을 포함할 수 있다.
복수의 빅셀 유닛(4210)에 대한 설명은 도 72를 참조하여 설명된 복수의 빅셀 유닛(4110)의 설명과 중복될 수 있어, 자세한 설명은 생략하기로 한다.
복수의 컨택(4220, 4225, 4230, 4235)에 대한 설명은 도 72를 참조하여 설명된 복수의 컨택(4120, 4125, 4130, 4135)의 설명과 중복될 수 있어, 자세한 설명은 생략하기로 한다.
복수의 와이어(4240, 4250)에 대한 설명은 도 72를 참조하여 설명된 복수의 와이어(4140, 4150)의 설명과 중복될 수 있어, 자세한 설명은 생략하기로 한다.
일 실시예에 따른 빅셀 어레이(4200)는 공통 컨택(4260)을 포함할 수 있다. 공통 컨택(4260)은 전도성 물질을 포함할 수 있다. 예를 들어, 공통 컨택(4260)은 금속을 포함할 수 있다.
일 실시예에 따른 공통 컨택(4260)은 상기 제1 축을 따라 배열된 복수의 빅셀 유닛(4210)과 전기적으로 연결될 수 있다. 예를 들어, 공통 컨택(4260)은 상기 제1 축을 따라 배열된 복수의 빅셀 유닛(4210)과 하부 메탈 컨택(60)을 통해 전기적으로 연결될 수 있다. 또한 예를 들어, 공통 컨택(4260)은 상기 제1 축을 따라 배열된 복수의 빅셀 유닛(4210)과 상부 메탈 컨택(10)을 통해 전기적으로 연결될 수 있다.
일 실시예에 따른 공통 컨택(4260)은 저항을 가질 수 있다. 이때, 한 기준점으로부터 공통 컨택(4260)의 일단까지의 길이가 길수록 저항이 커질 수 있다.
예를 들어, 1행 1열의 빅셀 유닛의 중앙인 제1 기준점으로부터 1행의 공통 컨택(4260)의 좌측 일단까지의 저항은 1행 2열의 빅셀 유닛의 중앙인 제2 기준점으로부터 1행의 공통 컨택(4260)의 좌측 일단까지의 저항보다 작을 수 있다.
또한 예를 들어, 1행 1열의 빅셀 유닛의 중앙인 제1 기준점으로부터 1행의 공통 컨택(4260)의 좌측 일단까지의 저항은 1행 3열의 빅셀 유닛의 중앙인 제3 기준점으로부터 1행의 공통 컨택(4260)의 좌측 일단까지의 저항보다 작을 수 있다.
또한 예를 들어, 1행 1열의 빅셀 유닛의 중앙인 제1 기준점으로부터 1행의 공통 컨택(4260)의 좌측 일단까지의 저항은 1행 4열의 빅셀 유닛의 중앙인 제4 기준점으로부터 1행의 공통 컨택(4260)의 좌측 일단까지의 저항보다 작을 수 있다.
이때, 공통 컨택(4260)이 와이어(4240)를 통해 공통 컨택(4260)의 좌측 일단과 이웃한 제1 컨택(4225)으로부터만 전원을 공급하게 될 경우, 1행의 복수의 빅셀 유닛들간의 저항의 차이가 균일하지 않을 수 있다.
빅셀 유닛들간의 저항이 서로 상이하거나 그 차이가 균일하지 않을 경우, 빅셀 유닛들간의 레이저 빔 출력의 세기가 상이할 수 있다. 빅셀 유닛들간의 레이저 빔 출력 세기가 상이한 경우, 빅셀 어레이에서는 불균일한 빔 프로파일이 형성될 수 있다.
또한 빅셀 유닛들의 레이저 빔 출력 세기가 상이한 경우, 각각의 빅셀 유닛들의 최대 측정 거리가 상이하게 되어 빅셀 어레이를 이용한 라이다 장치의 성능이 저하될 수 있다.
위의 문제를 해결하고자, 상기 제1 축을 따라 배열된 복수의 빅셀 유닛(4210)의 일단이 아닌 양단에 제1 컨택(4220, 4225)을 배치할 수 있다. 복수의 빅셀 유닛(4210)의 양단에 제1 컨택(4220, 4225)을 배치하여 빅셀 유닛들간의 저항 차이를 줄일 수 있다.
빅셀 유닛들간의 저항 차이에 대해서는 이하에서 설명한다.
도 74 내지 도 77은 일 실시예에 따른 빅셀 유닛의 저항을 설명하기 위한 도면이다. 구체적으로, 도 74 내지 도 77은 빅셀 어레이의 양단 중 일단과 이웃하는 컨택이 배치된 경우를 도시하고 있다.
도 74은 일 실시예에 따른 빅셀 어레이(4010)를 나타내는 도면이다. 일 실시예에 따른 빅셀 어레이(4010)는 복수의 빅셀 유닛(4011), 컨택(4012), 와이어(4013) 및 공통 컨택(4014)을 포함하고 있다. 이때, 빅셀 어레이(4010)는 빅셀 어레이의 양단 중 일단과 이웃하는 컨택(4012)을 포함하고 있다.
일 실시예에 따른 빅셀 어레이(4010)는 컨택(4012)을 통해 복수의 빅셀 유닛(4011)에 전원을 공급하여 빅셀 유닛(4011)을 동작시킬 수 있다. 이때, 각각의 빅셀 유닛(4011)이 가지는 컨택(4012)과 전기적으로 연결된 공통 컨택(4014)으로부터 발생되는 저항은 각각의 빅셀 유닛마다 다를 수 있다.
도 74를 참조하면, 1열의 빅셀 유닛은 제1 중앙점(C1)을 가질 수 있다. 제1 중앙점(C1)이 가지는 저항은 공통 컨택(4014)의 일단으로부터 1열의 빅셀 유닛의 모서리까지의 저항 및 1열의 빅셀 유닛의 모서리로부터 제1 중앙점(C1)까지의 저항의 합성 저항이 될 수 있다.
일 실시예에 따르면, 공통 컨택(4014)의 일단으로부터 1열 빅셀 유닛의 모서서리까지의 저항은 R1일 수 있다. 또한, 1열의 빅셀 유닛의 모서리로부터 제1 중앙점(C1)까지의 저항은 R2일 수 있다. 따라서, 제1 중앙점(C1)이 가지는 저항은 R1 및 R2의 합성 저항일 수 있다. 예를 들어, 제1 중앙점(C1)이 가지는 저항은 R1+R2 일 수 있다.
예를 들어, 공통 컨택(4014)의 일단으로부터 1열 빅셀 유닛의 모서리까지의 길이 및 1열의 빅셀 유닛의 모서리로부터 제1 중앙점(C1)까지의 길이가 같다면, R1은 R2와 동일할 수 있다. 따라서, 제1 중앙점(C1)이 가지는 저항은 2*R1 또는 2*R2 일 수 있다.
도 75는 일 실시예에 따른 빅셀 어레이(4010)를 나타내는 도면이다.
도 75를 참조하면, 2열의 빅셀 유닛은 제2 중앙점(C2)을 가질 수 있다. 제2 중앙점(C2)이 가지는 저항은 공통 컨택(4014)의 일단으로부터 2열의 빅셀 유닛의 모서리까지의 저항 및 2열의 빅셀 유닛의 모서리로부터 제2 중앙점(C2)까지의 합성 저항이 될 수 있다.
일 실시예에 따르면, 공통 컨택(4014)의 일단으로부터 2열 빅셀 유닛의 모서서리까지의 저항은 R1일 수 있다. 또한, 2열의 빅셀 유닛의 모서리로부터 제2 중앙점(C2)까지의 저항은 R2일 수 있다. 따라서, 제2 중앙점(C2)이 가지는 저항은 R1 및 R2의 합성 저항일 수 있다. 예를 들어, 제2 중앙점(C2)이 가지는 저항은 R1+R2 일 수 있다.
예를 들어, 공통 컨택(4014)의 일단으로부터 1열 빅셀 유닛의 모서리까지의 길이, 1열의 빅셀 유닛의 모서리로부터 제1 중앙점(C1)까지의 길이, 각 빅셀 유닛들 사이의 길이 및 2열 빅셀 유닛의 모서리로부터 제2 중앙점(C2)까지의 길이가 같다면, R1은 R2의 4배일 수 있다. 따라서, 제2 중앙점(C2)이 가지는 저항은 (5/4)*R1 또는 5*R2 일 수 있다.
도 76은 일 실시예에 따른 빅셀 어레이(4010)를 나타내는 도면이다.
도 76을 참조하면, 3열의 빅셀 유닛은 제3 중앙점(C3)을 가질 수 있다. 제3 중앙점(C3)이 가지는 저항은 공통 컨택(4014)의 일단으로부터 3열의 빅셀 유닛의 모서리까지의 저항 및 3열의 빅셀 유닛의 모서리로부터 제3 중앙점(C3)까지의 저항의 합성 저항이 될 수 있다.
일 실시예에 따르면, 공통 컨택(4014)의 일단으로부터 3열 빅셀 유닛의 모서서리까지의 저항은 R1일 수 있다. 또한, 3열의 빅셀 유닛의 모서리로부터 제3 중앙점(C3)까지의 저항은 R2일 수 있다. 따라서, 제3 중앙점(C3)이 가지는 저항은 R1 및 R2의 합성 저항일 수 있다. 예를 들어, 제3 중앙점(C3)이 가지는 저항은 R1+R2 일 수 있다.
예를 들어, 공통 컨택(4014)의 일단으로부터 1열 빅셀 유닛의 모서리까지의 길이, 1열의 빅셀 유닛의 모서리로부터 제1 중앙점(C1)까지의 길이, 각 빅셀 유닛들 사이의 길이 및 3열 빅셀 유닛의 모서리로부터 제3 중앙점(C3)까지의 길이가 같다면, R1은 R2의 7배일 수 있다. 따라서, 제3 중앙점(C3)이 가지는 저항은 (8/7)*R1 또는 8*R2 일 수 있다.
도 77은 일 실시예에 따른 빅셀 어레이(4010)를 나타내는 도면이다.
도 77을 참조하면, 4열의 빅셀 유닛은 제4 중앙점(C4)을 가질 수 있다. 제4 중앙점(C4)이 가지는 저항은 공통 컨택(4014)의 일단으로부터 4열의 빅셀 유닛의 모서리까지의 저항 및 4열의 빅셀 유닛의 모서리로부터 제4 중앙점(C4)까지의 저항의 합성 저항이 될 수 있다.
일 실시예에 따르면, 공통 컨택(4014)의 일단으로부터 4열 빅셀 유닛의 모서서리까지의 저항은 R1일 수 있다. 또한, 4열의 빅셀 유닛의 모서리로부터 제4 중앙점(C4)까지의 저항은 R2일 수 있다. 따라서, 제4 중앙점(C4)이 가지는 저항은 R1 및 R2의 합성 저항일 수 있다. 예를 들어, 제4 중앙점(C4)이 가지는 저항은 R1+R2 일 수 있다.
예를 들어, 공통 컨택(4014)의 일단으로부터 1열 빅셀 유닛의 모서리까지의 길이, 1열의 빅셀 유닛의 모서리로부터 제1 중앙점(C1)까지의 길이, 각 빅셀 유닛들 사이의 길이 및 4열 빅셀 유닛의 모서리로부터 제4 중앙점(C4)까지의 길이가 같다면, R1은 R2의 10배일 수 있다. 따라서, 제3 중앙점(C3)이 가지는 저항은 (11/10)*R1 또는 11*R2 일 수 있다.
도 74 내지 도 77에서 설명한 바와 같이, 컨택(4012)으로부터 멀어질수록 빅셀 유닛의 저항이 커질 수 있다.
1열의 빅셀 유닛은 같은 행의 빅셀 유닛들보다 컨택(4012)과 가까이 위치하므로, 1열의 빅셀 유닛은 같은 행의 빅셀 유닛들보다 저항이 작을 수 있다. 예를 들어, 1열의 빅셀 유닛의 저항은 2*R2일 수 있다.
2열의 빅셀 유닛은 1열의 빅셀 유닛보다 컨택(4012)과 멀리 위치하므로, 2열의 빅셀 유닛은 1열의 빅셀 유닛보다 저항이 클 수 있다. 예를 들어, 2열의 빅셀 유닛의 저항은 5*R2일 수 있다.
3열의 빅셀 유닛은 1열 및 2열의 빅셀 유닛보다 컨택(4012)과 멀리 위치하므로, 3열의 빅셀 유닛은 1열 및 2열의 빅셀 유닛보다 저항이 클 수 있다. 예를 들어, 3열의 빅셀 유닛의 저항은 8*R2일 수 있다.
4열의 빅셀 유닛은 1열, 2열 및 3열의 빅셀 유닛보다 컨택(4012)과 멀리 위치하므로, 4열의 빅셀 유닛은 1열, 2열 및 3열의 빅셀 유닛보다 저항이 클 수 있다. 예를 들어, 4열의 빅셀 유닛의 저항은 11*R2일 수 있다.
공통 컨택(4014)의 일단에 의한 빅셀 유닛의 저항이 각각 다르므로, 각각의 빅셀 유닛은 다른 세기의 레이저 빔을 출력할 수 있다. 빅셀 유닛들간의 저항 차이가 크면 클수록, 레이저 빔의 세기의 차이도 커질 수 있다. 레이저 빔의 세기 차이가 크게 되면, 빅셀 어레이의 빔 프로파일이 불균형해지고, 빅셀 어레이를 이용한 라이다 장치의 측정 거리는 빅셀 유닛마다 달라질 수 있는 문제점이 야기될 수 있다.
일 실시예에 따르면, 1열의 빅셀 유닛과 2열의 빅셀 유닛의 저항 차이는 3*R2일 수 있다. 또한, 1열의 빅셀 유닛과 3열의 빅셀 유닛의 저항 차이는 6*R2, 1열의 빅셀 유닛과 4열의 빅셀 유닛의 저항 차이는 9*R2일 수 있다.
이때, 1열의 빅셀 유닛의 저항 및 4열의 빅셀 유닛의 저항의 차이(9*R2)는 1열의 빅셀 유닛의 저항 및 2열의 빅셀 유닛의 저항의 차이(3*R2)보다 더 클 수 있다.
이때, 1열의 빅셀 유닛으로부터 출력되는 레이저 빔의 세기 및 4열의 빅셀 유닛으로부터 출력되는 레이저 빔의 세기의 차이는 1열의 빅셀 유닛으로부터 출력되는 레이저 빔의 세기 및 2열의 빅셀 유닛으로부터 출력되는 레이저 빔의 세기의 차이보다 더 클 수 있다.
빅셀 유닛들의 레이저 빔의 세기의 차이가 일정 범위를 벗어날 경우, 빅셀 어레이의 빔 프로파일이 불균일해지고, 빅셀 어레이를 이용한 라이다 장치의 측정 거리가 제한될 수 있다. 이를 해결하기 위해, 공통 컨택(4014)의 양단에 컨택(4012)을 배치하여 공통 컨택(4014) 및 복수의 빅셀 유닛(4011)과 전기적으로 연결시킬 수 있다. 공통 컨택(4014)의 양단에 전압을 가하는 방법에 대해서는 이하에서 설명할 것이다.
도 78 내지 도 81은 다른 일 실시예에 따른 빅셀 유닛의 저항을 설명하기 위한 도면이다. 구체적으로, 도 78 내지 도 81은 빅셀 어레이의 양단과 이웃하는 컨택이 배치된 경우를 도시하고 있다.
도 78은 다른 일 실시예에 따른 빅셀 어레이(4020)를 나타내는 도면이다. 일 실시예에 따른 빅셀 어레이(4020)는 복수의 빅셀 유닛(4021), 컨택(4022), 와이어(4023) 및 공통 컨택(4024)을 포함할 수 있다. 이때, 빅셀 어레이(4020)는 빅셀 어레이의 양단 중 일단과 이웃하는 컨택(4022)을 포함할 수 있다.
일 실시예에 따른 빅셀 어레이(4020)는 양단에 배치된 컨택(4022, 4025)을 통해 복수의 빅셀 유닛(4021)에 전원을 공급하여 빅셀 유닛(4021)을 동작시킬 수 있다. 이때, 각각의 빅셀 유닛(4021)이 가지는 컨택(4022, 4025)과 전기적으로 연결된 공통 컨택(4024)으로부터 발생되는 저항은 각각의 빅셀 유닛마다 다를 수 있다.
도 78을 참조하면, 1열의 빅셀 유닛은 제5 중앙점(C5)을 가질 수 있다. 제5 중앙점(C5)이 가지는 저항은 제1 서브 컨택(4022)에 의한 저항 및 제2 서브 컨택(4025)에 의한 저항의 합성 저항일 수 있다. 예를 들어, 제5 중앙점(C5)이 가지는 저항은 제1 서브 컨택(4022)에 의한 저항 및 제2 서브 컨택(4025)에 의한 저항을 병렬 연결한 저항일 수 있다.
일 실시예에 따르면, 공통 컨택(4014)의 일단으로부터 1열 빅셀 유닛의 모서서리까지의 저항은 R1일 수 있다. 또한, 1열의 빅셀 유닛의 모서리로부터 제5 중앙점(C5)까지의 저항은 R2일 수 있다. 또한, 1열의 빅셀 유닛의 모서리로부터 공통 컨택(4024)의 다른 일단까지의 저항은 R3일 수 있다.
따라서, 제5 중앙점(C5)이 가지는 저항은 R1, R2 및 R3의 합성 저항일 수 있다. 예를 들어, 제5 중앙점(C5)이 가지는 저항은 (R1+R2)*(R2+R3)/(R1+2*R2+R3)일 수 있다.
예를 들어, 공통 컨택(4014)의 일단으로부터 1열 빅셀 유닛의 모서리까지의 길이 및 1열의 빅셀 유닛의 모서리로부터 제5 중앙점(C5)까지의 길이가 같다면, R1은 R2와 동일할 수 있다. 또한, 제5 중앙점(C5)까지의 길이, 각 빅셀 유닛들 사이의 길이 및 빅셀 유닛의 모서리로부터 공통 컨택(4014)의 일단 또는 다른 일단까지의 길이가 같다면, R3는 R1 또는 R2의 10배일 수 있다. 따라서, 제5 중앙점(C5)이 가지는 저항은 (22/13)*R2일 수 있다.
도 79는 다른 일 실시예에 따른 빅셀 어레이(4020)를 나타내는 도면이다.
도 79를 참조하면, 2열의 빅셀 유닛은 제6 중앙점(C6)을 가질 수 있다. 제6 중앙점(C6)이 가지는 저항은 제1 서브 컨택(4022)에 의한 저항 및 제2 서브 컨택(4025)에 의한 저항의 합성 저항일 수 있다. 예를 들어, 제6 중앙점(C6)이 가지는 저항은 제1 서브 컨택(4022)에 의한 저항 및 제2 서브 컨택(4025)에 의한 저항을 병렬 연결한 저항일 수 있다.
일 실시예에 따르면, 공통 컨택(4014)의 일단으로부터 2열 빅셀 유닛의 모서서리까지의 저항은 R1일 수 있다. 또한, 2열의 빅셀 유닛의 모서리로부터 제6 중앙점(C6)까지의 저항은 R2일 수 있다. 또한, 2열의 빅셀 유닛의 모서리로부터 공통 컨택(4024)의 다른 일단까지의 저항은 R3일 수 있다.
따라서, 제6 중앙점(C6)이 가지는 저항은 R1, R2 및 R3의 합성 저항일 수 있다. 예를 들어, 제6 중앙점(C6)이 가지는 저항은 (R1+R2)*(R2+R3)/(R1+2*R2+R3)일 수 있다.
예를 들어, 공통 컨택(4014)의 일단으로부터 1열 빅셀 유닛의 모서리까지의 길이 및 1열의 빅셀 유닛의 모서리로부터 제6 중앙점(C6)까지의 길이가 같다면, R1은 R2의 4배일 수 있다. 또한, 제6 중앙점(C6)까지의 길이, 각 빅셀 유닛들 사이의 길이 및 빅셀 유닛의 모서리로부터 공통 컨택(4014)의 일단 또는 다른 일단까지의 길이가 같다면, R3는 R2의 7배일 수 있다. 따라서, 제6 중앙점(C6)이 가지는 저항은 (40/13)*R2일 수 있다.
도 80은 다른 일 실시예에 따른 빅셀 어레이(4020)를 나타내는 도면이다.
도 80을 참조하면, 3열의 빅셀 유닛은 제7 중앙점(C7)을 가질 수 있다. 제7 중앙점(C7)이 가지는 저항은 제1 서브 컨택(4022)에 의한 저항 및 제2 서브 컨택(4025)에 의한 저항의 합성 저항일 수 있다. 예를 들어, 제7 중앙점(C7)이 가지는 저항은 제1 서브 컨택(4022)에 의한 저항 및 제2 서브 컨택(4025)에 의한 저항을 병렬 연결한 저항일 수 있다.
일 실시예에 따르면, 공통 컨택(4014)의 일단으로부터 3열 빅셀 유닛의 모서서리까지의 저항은 R1일 수 있다. 또한, 3열의 빅셀 유닛의 모서리로부터 제7 중앙점(C7)까지의 저항은 R2일 수 있다. 또한, 3열의 빅셀 유닛의 모서리로부터 공통 컨택(4024)의 다른 일단까지의 저항은 R3일 수 있다.
따라서, 제7 중앙점(C7)이 가지는 저항은 R1, R2 및 R3의 합성 저항일 수 있다. 예를 들어, 제7 중앙점(C7)이 가지는 저항은 (R1+R2)*(R2+R3)/(R1+2*R2+R3)일 수 있다.
예를 들어, 공통 컨택(4014)의 일단으로부터 3열 빅셀 유닛의 모서리까지의 길이 및 3열의 빅셀 유닛의 모서리로부터 제7 중앙점(C7)까지의 길이가 같다면, R1은 R2의 7배일 수 있다. 또한, 제7 중앙점(C7)까지의 길이, 각 빅셀 유닛들 사이의 길이 및 빅셀 유닛의 모서리로부터 공통 컨택(4014)의 일단 또는 다른 일단까지의 길이가 같다면, R3는 R2의 4배일 수 있다. 따라서, 제7 중앙점(C7)이 가지는 저항은 (40/13)*R2일 수 있다.
도 81은 다른 일 실시예에 따른 빅셀 어레이(4020)를 나타내는 도면이다.
도 81을 참조하면, 4열의 빅셀 유닛은 제8 중앙점(C8)을 가질 수 있다. 제8 중앙점(C8)이 가지는 저항은 제1 서브 컨택(4022)에 의한 저항 및 제2 서브 컨택(4025)에 의한 저항의 합성 저항일 수 있다. 예를 들어, 제8 중앙점(C8)이 가지는 저항은 제1 서브 컨택(4022)에 의한 저항 및 제2 서브 컨택(4025)에 의한 저항을 병렬 연결한 저항일 수 있다.
일 실시예에 따르면, 공통 컨택(4014)의 일단으로부터 4열 빅셀 유닛의 모서서리까지의 저항은 R1일 수 있다. 또한, 4열의 빅셀 유닛의 모서리로부터 제8 중앙점(C8)까지의 저항은 R2일 수 있다. 또한, 4열의 빅셀 유닛의 모서리로부터 공통 컨택(4024)의 다른 일단까지의 저항은 R3일 수 있다.
따라서, 제8 중앙점(C8)이 가지는 저항은 R1, R2 및 R3의 합성 저항일 수 있다. 예를 들어, 제8 중앙점(C8)이 가지는 저항은 (R1+R2)*(R2+R3)/(R1+2*R2+R3)일 수 있다.
예를 들어, 공통 컨택(4014)의 일단으로부터 4열 빅셀 유닛의 모서리까지의 길이 및 4열의 빅셀 유닛의 모서리로부터 제8 중앙점(C8)까지의 길이가 같다면, R1은 R2의 10배일 수 있다. 또한, 제8 중앙점(C8)까지의 길이, 각 빅셀 유닛들 사이의 길이 및 빅셀 유닛의 모서리로부터 공통 컨택(4014)의 일단 또는 다른 일단까지의 길이가 같다면, R3는 R2와 동일할 수 있다. 따라서, 제8 중앙점(C8)이 가지는 저항은 (22/13)*R2일 수 있다.
도 78 내지 도 81의 빅셀 유닛들 사이의 저항 차이는 도 74 내지 도 77의 빅셀 유닛들 사이의 저항 차이보다 작을 수 있다.
일 실시예에 따르면, 도 74 내지 도 77의 1열 빅셀 유닛의 제1 중앙점(C1)의 저항은 2*R2, 2열 빅셀 유닛의 제2 중앙점(C2)의 저항은 5*R2, 3열 빅셀 유닛의 제3 중앙점(C3)의 저항은 8*R2, 4열 빅셀 유닛의 제4 중앙점(C4)의 저항은 11*R2일 수 있다.
이때, 빅셀 유닛들 사이의 저항의 차이가 가장 큰 경우는 1열 빅셀 유닛과 4열 빅셀 유닛의 저항차인 9*R2일 수 있다.
다른 일 실시예에 따르면, 도 78 내지 도 81의 1열 빅셀 유닛의 제5 중앙점(C5)의 저항은 (22/13)*R2, 2열 빅셀 유닛의 제6 중앙점(C6)의 저항은 (40/13)*R2, 3열 빅셀 유닛의 제7 중앙점(C7)의 저항은 (40/13)*R2, 4열 빅셀 유닛의 제8 중앙점(C8)의 저항은 (22/13)*R2일 수 있다.
이때, 빅셀 유닛들 사이의 저항의 차이가 가장 큰 경우는 1열 빅셀 유닛과 2열 빅셀 유닛의 저항차, 1열 빅셀 유닛과 3열 빅셀 유닛의 저항차, 2열 빅셀 유닛과 4열 빅셀 유닛의 저항차 또는 3열 빅셀 유닛과 4열 빅셀 유닛의 저항차인 (18/13)*R2일 수 있다.
따라서, 도 78 내지 도 81의 빅셀 어레이는 도 74 내지 도 77의 빅셀 어레이보다 빅셀 유닛들 사이의 저항의 차이가 더 작을 수 있다. 예를 들어, 도 74 내지 도 77의 빅셀 어레이(4010)에 포함된 빅셀 유닛들(4011) 사이의 저항의 차이가 가장 큰 경우는 9*R2인 반면, 도 78 내지 도 81의 빅셀 어레이(4020)에 포함된 빅셀 유닛들(4021) 사이의 저항의 차이가 가장 큰 경우는 9*R2보다 작은 (18/13)*R2일 수 있다.
또한 예를 들어, 도 74 내지 도 77의 빅셀 어레이(4010)에 포함된 빅셀 유닛들(4011) 사이의 저항의 차이가 가장 작은 경우는 3*R2인 반면, 도 78 내지 도 81의 빅셀 어레이(4020)에 포함된 빅셀 유닛들(4021) 사이의 저항의 차이가 가장 큰 경우는 3*R2보다 작은 (18/13)*R2일 수 있다.
빅셀 어레이에 포함된 빅셀 유닛들의 하부 메탈 컨택과 연결된 공통 컨택의 양단에 컨택을 배치하여 빅셀 유닛들에 전압을 공급할 경우, 빅셀 유닛들이 가지는 저항의 차이는 줄어들 수 있다.
빅셀 어레이에 포함된 빅셀 유닛들의 하부 메탈 컨택과 연결된 공통 컨택의 양단에 컨택을 배치하여 빅셀 유닛들에 전압을 공급할 경우, 빅셀 유닛들이 출력하는 레이저 빔의 세기의 차이가 줄어들 수 있다.
빅셀 유닛들의 하부 메탈과 연결된 공통 컨택의 일단에만 컨택을 배치하여 빅셀 유닛들에 전압을 공급할 경우, 컨택과 가까이 배치된 빅셀 유닛은 비교적 작은 저항을 가져 비교적 큰 세기의 레이저 빔을 출력할 수 있다.
반면, 컨택과 멀리 배치된 빅셀 유닛은 비교적 큰 저항을 가져 비교적 작은 세기의 레이저 빔을 출력할 수 있다. 공통 컨택의 일단에만 컨택을 배치하여 빅셀 유닛들에 전압을 공급하는 방법은 빅셀 어레에 포함된 빅셀 유닛들의 레이저 빔 출력에 심한 불균일을 초래할 수 있다.
그러나 빅셀 유닛들의 하부 메탈과 연결된 공통 컨택의 양단에 컨택을 배치하여 빅셀 유닛들에 전압을 공급할 경우, 공통 컨택의 일단에만 컨택을 배치하여 빅셀 유닛들에 전압을 공급하는 경우보다 빅셀 유닛들 사이의 저항의 차이를 줄일 수 있다.
빅셀 유닛들 사이의 저항의 차이를 줄이므로써, 빅셀 유닛들에서 출력되는 각각의 레이저 빔의 세기의 차이를 줄일 수 있다. 빅셀 유닛들에서 출력되는 각각의 레이저 빔의 세기의 차이를 줄이므로써, 빅셀 어레이를 사용하는 라이다 장치의 최대 측정 거리는 비교적 제한되지 않을 수 있다.
도 82는 일 방향에서 본 빅셀 어레이를 나타낸 도면이다. 상기 일 방향은 x축 방향 또는 y축 방향이 될 수 있다.
도 82를 참조하면, 빅셀 어레이(4300)는 복수의 빅셀 유닛(4301, 4302, 4303), 컨택(4370, 4380) 및 와이어(4391, 4392)를 포함할 수 있다.
빅셀 어레이(4300)는 복수의 빅셀 유닛(4301, 4302, 4303)을 포함할 수 있다. 도 82는 3개의 빅셀 유닛(4301, 4302, 4303)을 포함하는 빅셀 어레이(4300)를 도시하고 있으나, 이에 한정되지 않고 빅셀 어레이(4300)는 1, 2, 4, 5, 6, 7, 8, 9, 10, 11, 12개 등의 단수 또는 복수의 빅셀 유닛을 포함할 수 있다. 빅셀 어레이(4300)는 예시로 기재된 숫자에 한정되지 않고 다른 개수의 빅셀 유닛을 포함할 수 있다.
복수의 빅셀 유닛(4301, 4302, 4303)은 복수의 빅셀 이미터를 포함할 수 있다. 도 82는 표현의 편의상 1개의 빅셀 이미터를 포함하는 빅셀 유닛을 도시하고 있으나, 이에 한정되지 않고 빅셀 유닛(4301, 4302, 4303)은 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 20, 30, 40, 50, 60, 70, 80, 90, 100, 200, 300, 400, 500개 등의 단수 또는 복수의 빅셀 이미터를 포함할 수 있다. 빅셀 유닛(4301, 4302, 4303)은 예시로 기재된 숫자에 한정되지 않고 다른 개수의 빅셀 이미터를 포함할 수 있다.
빅셀 유닛(4301, 4302, 4303)은 상부 메탈 컨택(4310), 상부 DBR 레이어(4320), 하부 DBR 레이어(4330), 활성 레이어 또는 active 레이어(4340), 기판(4350) 및 하부 메탈 컨택(4360)을 포함할 수 있다.
상부 메탈 컨택(4310), 상부 DBR 레이어(4320), 하부 DBR 레이어(4330), 활성 레이어 또는 active 레이어(4340), 기판(4350) 및 하부 메탈 컨택(4360)에 대한 내용은 도 3과 그에 대한 설명에 자세히 기재되어 있어 자세한 설명은 생략한다.
빅셀 어레이(4300)는 복수의 컨택(4370, 4380)을 포함할 수 있다. 제1 컨택(4370)은 빅셀 유닛(4301, 4302, 4303)의 하부 메탈 컨택(4360)과 적어도 일부분이 접촉될 수 있다. 제1 컨택(4370)은 하부 메탈 컨택(4360)과 적어도 일부분이 접촉되어 하부 메탈 컨택(4360)을 통해 빅셀 유닛(4301, 4302, 4303)에 전원을 공급할 수 있다.
예를 들어, 제1 컨택(4370)은 하부 메탈 컨택(4360)을 통해 빅셀 유닛(4301, 4302, 4303)에 n형 전압을 공급할 수 있다. 예를 들어, 제1 컨택(4370)은 하부 메탈 컨택(4360)을 통해 빅셀 유닛(4301, 4302, 4303)에 기준 전압 이하의 전압을 공급할 수 있다.
또한 예를 들어, 제1 컨택(4370)은 하부 메탈 컨택(4360)을 통해 빅셀 유닛(4301, 4302, 4303)에 p형 전압을 공급할 수 있다. 또한 예를 들어, 제1 컨택(4370)은 하부 메탈 컨택(4360)을 통해 빅셀 유닛(4301, 4302, 4303)에 기준 전압 이상의 전압을 공급할 수 있다.
제2 컨택(4380)은 빅셀 유닛(4301, 4302, 4303)의 상부 메탈 컨택(4310)과 전기적으로 연결될 수 있다. 예를 들어 제2 컨택(4380)은 빅셀 유닛(4301, 4302, 4303)의 상부 메탈 컨택(4310)과 와이어(4391, 4392)를 통해 전기적으로 연결될 수 있다.
예를 들어, 제2 컨택(4380)은 와이어(4391, 4392) 및 상부 메탈 컨택(4310)을 통해 빅셀 유닛(4301, 4302, 4303)에 p형 전압을 공급할 수 있다. 예를 들어, 제2 컨택(4380)은 와이어(4391, 4392) 및 상부 메탈 컨택(4310)을 통해 빅셀 유닛(4301, 4302, 4303)에 기준 전압 이상의 전압을 공급할 수 있다.
또한 예를 들어, 제2 컨택(4380)은 와이어(4391, 4392) 및 상부 메탈 컨택(4310)을 통해 빅셀 유닛(4301, 4302, 4303)에 n형 전압을 공급할 수 있다.
또한 예를 들어, 제2 컨택(4380)은 와이어(4391, 4392) 및 상부 메탈 컨택(4310)을 통해 빅셀 유닛(4301, 4302, 4303)에 기준 전압 이하의 전압을 공급할 수 있다.
도 83은 다른 일 방향에서 본 빅셀 어레이를 나타낸 도면이다. 상기 일 방향은 y축 방향 또는 x축 방향이 될 수 있다. 또한, 상기 일 방향은 도 82에서 본 방향과 다른 방향일 수 있다. 예를 들어 도 82에서 본 방향과 90도를 이루는 방향일 수 있다.
일 실시예에 따르면, 빅셀 유닛(4301, 4302, 4303)들은 서로 전기적으로 연결될 수 있다. 예를 들어, 빅셀 유닛(4301, 4302, 4303)들의 상부 메탈 컨택(4310)은 서로 전기적으로 연결될 수 있다. 또한 예를 들어, 빅셀 유닛(4301, 4302, 4303)들의 하부 메탈 컨택(4360)은 서로 전기적으로 연결될 수 있다.
이때, 빅셀 유닛(4301, 4302, 4303)들의 상부 메탈 컨택(4310)은 와이어(4391, 4392)를 통해 서로 전기적으로 연결될 수 있다. 또한 이때, 빅셀 유닛(4301, 4302, 4303)들의 하부 메탈 컨택(4360)은 제1 컨택(4370)을 통해 서로 전기적으로 연결될 수 있다.
도 82의 빅셀 어레이(4300)는 도 73의 빅셀 어레이(4200)를 컨택(4225)의 측면이 정면이 되는 방향에서 바라본 형태일 수 있다. 빅셀 어레이(4300)를 일 방향에서 보면, 1행의 빅셀 유닛들(4301), 2행의 빅셀 유닛들(4302) 및 3행의 빅셀 유닛들(4303)이 도 82와 같이 나타날 수 있다.
1행의 빅셀 유닛들(4301)은 제1 컨택(4370)을 통해 각각의 하부 메탈 컨택(4360)들이 서로 전기적으로 연결되어 있다. 2행의 빅셀 유닛들(4302) 및 3행의 빅셀 유닛들(4303)도 제1 컨택(4370)을 통해 각각의 하부 메탈 컨택(4360)들이 서로 전기적으로 연결될 수 있다.
일 실시예에 따르면, 제1 컨택(4370)은 하부 메탈 컨택(4360)을 통해 빅셀 유닛(4301, 4302, 4303)에 n형 전압을 공급할 수 있다. 예를 들어, 제1 컨택(4370)은 하부 메탈 컨택(4360)을 통해 빅셀 유닛(4301, 4302, 4303)에 기준 전압 이하의 전압을 공급할 수 있다.
다른 일 실시예에 따르면, 제1 컨택(4370)은 하부 메탈 컨택(4360)을 통해 빅셀 유닛(4301, 4302, 4303)에 p형 전압을 공급할 수 있다. 예를 들어, 제1 컨택(4370)은 하부 메탈 컨택(4360)을 통해 빅셀 유닛(4301, 4302, 4303)에 기준 전압 이상의 전압을 공급할 수 있다.
또한 빅셀 어레이(4300)를 일 방향에서 보면, 복수의 빅셀 유닛들이 1열을 이룰 수 있다. 예를 들어, 1행의 빅셀 유닛(4301), 2행의 빅셀 유닛(4302) 및 3행의 빅셀 유닛(4303)은 일 축을 따라 배열되어 1열을 이룰 수 있다.
1열을 이루는 복수의 빅셀 유닛들(4301, 4302, 4303)은 와이어(4391, 4392)를 통해 각각의 상부 메탈 컨택(4310)들이 서로 전기적으로 연결될 수 있다.
예를 들어, 1열의 복수의 빅셀 유닛들 중 1행의 빅셀 유닛(4301)과 2행의 빅셀 유닛(4302)은 와이어(4392)를 통해 서로 전기적으로 연결될 수 있다. 또한 예를 들어, 1열의 복수의 빅셀 유닛들 중 2행의 빅셀 유닛(4302)과 3행의 빅셀 유닛(4303)은 와이어(4392)를 통해 서로 전기적으로 연결될 수 있다.
예를 들어, 1열의 복수의 빅셀 유닛들 중 1행의 빅셀 유닛(4301) 및 3행의 빅셀 유닛(4303)은 와이어(4391)를 통해 제2 컨택(4380)과 연결될 수 있다.
일 실시예에 따르면, 제2 컨택(4380)은 상부 메탈 컨택(4310)을 통해 빅셀 유닛(4301, 4302, 4303)에 p형 전압을 공급할 수 있다. 예를 들어, 제2 컨택(4380)은 상부 메탈 컨택(4310)을 통해 빅셀 유닛(4301, 4302, 4303)에 기준 전압 이상의 전압을 공급할 수 있다.
다른 일 실시예에 따르면, 제2 컨택(4380)은 상부 메탈 컨택(4310)을 통해 빅셀 유닛(4301, 4302, 4303)에 n형 전압을 공급할 수 있다. 예를 들어, 제2 컨택(4380)은 상부 메탈 컨택(4310)을 통해 빅셀 유닛(4301, 4302, 4303)에 기준 전압 이하의 전압을 공급할 수 있다.
도 83의 빅셀 어레이(4300)는 도 73의 빅셀 어레이(4200)를 컨택(4235)의 측면이 정면이 되는 방향에서 바라본 형태일 수 있다. 빅셀 어레이(4300)를 다른 일 방향에서 보면, 1열의 빅셀 유닛들(4304), 2열의 빅셀 유닛들(4305) 및 3열의 빅셀 유닛들(4306)이 도 83과 같이 나타날 수 있다.
1열의 빅셀 유닛들(4304)은 제2 컨택(4380)을 통해 각각의 상부 메탈 컨택(4360)들이 서로 전기적으로 연결될 수 있다. 2열의 빅셀 유닛들(4305) 및 3열의 빅셀 유닛들(4306)도 제2 컨택(4380)을 통해 각각의 상부 메탈 컨택(4310)들이 서로 전기적으로 연결될 수 있다.
예를 들어, 1열의 복수의 빅셀 유닛들 중 다른 행에 배열된 빅셀 유닛들은 와이어(4392)를 통해 서로 전기적으로 연결될 수 있다. 또한 예를 들어, 1열의 복수의 빅셀 유닛들 중 제2 컨택(4380)과 이웃하여 배치된 빅셀 유닛들은 와이어(4391)를 통해 제2 컨택(4380)과 연결될 수 있다.
일 실시예에 따르면, 제2 컨택(4380)은 상부 메탈 컨택(4310)을 통해 빅셀 유닛(4301, 4302, 4303)에 p형 전압을 공급할 수 있다. 예를 들어, 일 실시예에 따르면, 제2 컨택(4380)은 상부 메탈 컨택(4310)을 통해 빅셀 유닛(4301, 4302, 4303)에 기준 전압 이상의 전압을 공급할 수 있다.
다른 일 실시예에 따르면, 제2 컨택(4380)은 상부 메탈 컨택(4310)을 통해 빅셀 유닛(4301, 4302, 4303)에 n형 전압을 공급할 수 있다. 예를 들어, 제2 컨택(4380)은 상부 메탈 컨택(4310)을 통해 빅셀 유닛(4301, 4302, 4303)에 기준 전압 이하의 전압을 공급할 수 있다.
또한 빅셀 어레이(4300)를 다른 일 방향에서 보면, 복수의 빅셀 유닛들이 1행을 이룰 수 있다. 예를 들어, 1열의 빅셀 유닛(4304), 2열의 빅셀 유닛(4305) 및 3행의 빅셀 유닛(4306)은 일 축을 따라 배열되어 1행을 이룰 수 있다.
1행을 이루는 복수의 빅셀 유닛들(4304, 4305, 4306)은 제1 컨택(4370)을 통해 각각의 하부 메탈 컨택(4360)들이 서로 전기적으로 연결될 수 있다. 예를 들어, 1행의 복수의 빅셀 유닛들 중 1열의 빅셀 유닛(4304), 2열의 빅셀 유닛(4305) 및 3열의 빅셀 유닛(4306)이 제1 컨택(4370)을 통해 서로 전기적으로 연결될 수 있다.
일 실시예에 따르면, 제1 컨택(4370)은 하부 메탈 컨택(4360)을 통해 빅셀 유닛(4301, 4302, 4303)에 n형 전압을 공급할 수 있다. 예를 들어, 제1 컨택(4370)은 하부 메탈 컨택(4360)을 통해 빅셀 유닛(4301, 4302, 4303)에 기준 전압 이하의 전압을 공급할 수 있다.
다른 일 실시예에 따르면, 제1 컨택(4370)은 하부 메탈 컨택(4360)을 통해 빅셀 유닛(4301, 4302, 4303)에 p형 전압을 공급할 수 있다. 예를 들어, 제1 컨택(4370)은 하부 메탈 컨택(4360)을 통해 빅셀 유닛(4301, 4302, 4303)에 기준 전압 이상의 전압을 공급할 수 있다.
도 84는 또 다른 실시예에 따른 빅셀 어레이를 설명하기 위한 도면이다. 도 84는 빅셀 어레이의 일부를 위에서 바라본 평면도일 수 있다.
도 84를 참조하면, 일 실시예에 따른 빅셀 어레이(4030)는 복수의 빅셀 유닛(4031), 컨택(4032), 공통 컨택(4034) 및 와이어(4035)를 포함할 수 있다.
빅셀 어레이(4030)는 도 78 내지 도 81의 빅셀 어레이(4020)와 달리, 빅셀 유닛들(4031)의 중앙 부분에 추가적으로 와이어가 연결될 수 있다. 예를 들어, 중앙 부분에서 공통 컨택(4034)에 추가적으로 와이어가 연결될 수 있다.
빅셀 유닛들(4031)의 중앙 부분에 와이어 연결을 추가함으로써, 빅셀 유닛들이 가지는 공통 컨택(4034)에 의한 저항이 동일해지거나 그 차이가 감소할 수 있다.
예를 들어, 1열의 빅셀 유닛이 공통 컨택(4034)의 일단으로부터 받는 저항은 R, 다른 일단으로부터 받는 저항은 2R이므로, 1열의 빅셀 유닛이 공통 컨택으로부터 받는 총 저항은 (2/3)R일 수 있다.
또한 예를 들어, 2열의 빅셀 유닛이 공통 컨택(4034)의 일단으로부터 받는 저항은 2R, 다른 일단으로부터 받는 저항은 R이므로, 2열의 빅셀 유닛이 공통 컨택으로부터 받는 총 저항은 (2/3)R일 수 있다.
따라서, 1열의 빅셀 유닛이 공통 컨택으로부터 받는 총 저항과 2열의 빅셀 유닛이 공통 컨택으로부터 받는 총 저항은 (2/3)R로 동일할 수 있다.
또한 예를 들어, 3열의 빅셀 유닛이 공통 컨택(4034)의 일단으로부터 받는 저항은 R, 다른 일단으로부터 받는 저항은 2R이므로, 3열의 빅셀 유닛이 공통 컨택으로부터 받는 총 저항은 (2/3)R일 수 있다.
또한 예를 들어, 4열의 빅셀 유닛이 공통 컨택(4034)의 일단으로부터 받는 저항은 2R, 다른 일단으로부터 받는 저항은 R이므로, 4열의 빅셀 유닛이 공통 컨택으로부터 받는 총 저항은 (2/3)R일 수 있다.
따라서, 3열의 빅셀 유닛이 공통 컨택으로부터 받는 총 저항과 4열의 빅셀 유닛이 공통 컨택으로부터 받는 총 저항은 (2/3)R로 동일할 수 있다. 또한, 1열의 빅셀 유닛, 2열의 빅셀 유닛, 3열의 빅셀 유닛 및 4열의 빅셀 유닛이 공통 컨택으로부터 받는 총 저항은 (2/3)R로 동일할 수 있다.
도 85는 일 방향에서 본 또 다른 실시예에 따른 빅셀 어레이를 나타낸 도면이다. 도 85는 도 84의 빅셀 어레이를 정면에서 바라본 정면도일 수 있다.
도 85을 참조하면, 빅셀 어레이(4800)는 복수의 빅셀 유닛, 공통 컨택(4870), 기판(4875), 컨택(7880) 및 와이어(4891)를 포함할 수 있다.
일 실시예에 따르면, 빅셀 어레이(4800)에 포함된 일부 빅셀 유닛들은 공통 컨택(4870) 및 기판(4875)을 공유할 수 있다. 또한 빅셀 어레이에 포함된 일부 또는 전부의 빅셀 유닛들은 컨택(4880)을 공유할 수 있다. 빅셀 유닛들은 하부 메탈 컨택을 통해 공통 컨택(4870)과 전기적으로 연결될 수 있다.
일 실시예에 따르면, 빅셀 어레이(4800)는 도 82의 빅셀 어레이(4300)와 달리, 빅셀 유닛들의 중앙 부분에 추가적으로 와이어 연결을 포함할 수 있다. 예를 들어, 빅셀 유닛들의 중앙 부분에서 공통 컨택(4870)에 추가적인 와이어 연결을 할 수 있다.
빅셀 유닛들의 중앙 부분에서 공통 컨택(4870)에 와이어 연결을 추가함으로써, 빅셀 유닛들이 가지는 공통 컨택(4870)에 의한 저항이 동일해지거나 그 차이가 감소할 수 있다.
도 86은 일 실시예에 따른 빅셀 어레이를 설명하기 위한 도면이다.
도 86을 참조하면, 빅셀 어레이(4400)는 복수의 빅셀 유닛(4410, 4415), 복수의 컨택(4420, 4430) 및 복수의 와이어(4440, 4450)를 포함할 수 있다.
복수의 빅셀 유닛(4410, 4415), 복수의 컨택(4420, 4425, 4430, 4435) 및 복수의 와이어(4440, 4450)에 대한 내용은 도 72와 그에 대한 설명에 자세히 기재되어 있어 중복될 수 있는 자세한 설명은 생략한다.
일 실시예에 따른 빅셀 어레이(4400)는 복수의 한 쌍의 빅셀 유닛, 커플 빅셀 유닛 또는 페어 빅셀 유닛(4410, 4415)을 포함할 수 있다.
일 실시예에 따른 페어 빅셀 유닛(4410, 4415)은 2차원으로 배열될 수 있다. 예를 들어, 복수의 페어 빅셀 유닛(4410, 4415)은 제1 축을 기준으로 배열되고, 상기 제1 축과 다른 제2 축을 따라 배열될 수 있다. 예를 들어, 복수의 페어 빅셀 유닛(4410, 4415)은 x축을 따라 배열되고, y축을 따라 배열되어 매트릭스(matrix) 형태를 나타낼 수 있다.
도 86은 4 X 4의 매트릭스 형태를 가지는 빅셀 어레이만을 도시하고 있으나, 빅셀 어레이의 형태는 이에 한정되지 않는다. 예를 들어, 빅셀 어레이는 5 X 5, 6 X 6, 7 X 7, 8 X 8, 9 X 9, 10 X 10, 11 X 11, 12 X 12, 13 X 13, 14 X 14, 15 X 15, 16 X 16 등의 매트릭스 형태가 될 수 있다. 빅셀 어레이의 형태는 기재된 숫자에 한정되지 않고 다른 숫자로 이루어진 매트릭스 형태가 될 수 있다.
또한 예를 들어, 복수의 페어 빅셀 유닛(4410, 4415)은 x축을 따라 배열되고, 상기 x축과 90도 이하의 각도를 이루는 제2 축을 따라 배열될 수 있다. 이때, 복수의 빅셀 어레이(4100)는 마름모꼴 또는 사다리꼴 형태를 나타낼 수 있다. 또한, 복수의 빅셀 어레이(4100)는 벌집구조(honeycomb)의 형태를 나타낼 수 있다.
일 실시예에 따른 빅셀 어레이(4400)는 복수의 컨택(4420, 4425, 4430, 4435)을 포함할 수 있다. 예를 들어, 빅셀 어레이(4400)는 상기 제1 축을 따라 배열된 빅셀 어레이의 양단과 이웃하여 배치되는 제1 컨택(4420, 4425)을 포함할 수 있다. 또한 예를 들어, 빅셀 어레이(4400)는 상기 제2 축을 따라 배열된 빅셀 어레이의 양단과 이웃하여 배치되는 제2 컨택(4430, 4435)을 포함할 수 있다.
일 실시예에 따른 페어 빅셀 유닛에 포함된 각각의 빅셀 유닛들(4410, 4415)은 제2 컨택(4430, 4435)을 공유할 수 있다. 예를 들어, 페어 빅셀 유닛에 포함된 각각의 빅셀 유닛들(4410, 4415)은 제2 컨택(4430, 4435)과 동시에 전기적으로 연결될 수 있다.
일 실시예에 따른 빅셀 어레이(4400)는 복수의 컨택(4420, 4425, 4430, 4435)을 통해 전원을 공급받을 수 있다.
예를 들어, 상기 제1 축을 따라 배열된 빅셀 어레이의 양단에 배열된 제1 컨택(4420, 4425)은 상기 복수의 페어 빅셀 유닛(4410, 4415)의 하부 메탈 컨택(60)과 연결될 수 있다. 이때, 페어 빅셀 유닛(4410, 4415)의 하부 메탈 컨택(60)에는 제1 컨택(4420, 4425)을 통하여 n형 전압이 인가될 수 있다.
또한 예를 들어, 상기 제2 축을 따라 배열된 빅셀 어레이의 양단에 배열된 제2 컨택(4430, 4435)은 상기 복수의 페어 빅셀 유닛(4410, 4415)의 상부 메탈 컨택(10)과 연결될 수 있다. 이때, 페어 빅셀 유닛(4410, 4415)의 상부 메탈 컨택(10)에는 제2 컨택(4430, 4435)을 통하여 p형 전압이 인가될 수 있다. 예를 들어, 페어 빅셀 유닛(4410, 4415)의 상부 메탈 컨택(10)에는 제2 컨택(4430, 4435)을 통하여 기준 전압 이상의 전압이 인가될 수 있다.
다른 예를 들어, 상기 제1 축을 따라 배열된 빅셀 어레이의 양단에 배열된 제1 컨택(4420, 4425)은 상기 복수의 페어 빅셀 유닛(4410, 4415)의 상부 메탈 컨택(60)과 연결될 수 있다. 이때, 페어 빅셀 유닛(4410, 4415)의 상부 메탈 컨택(60)에는 제1 컨택(4420, 4425)을 통하여 p형 전압이 인가될 수 있다. 예를 들어, 페어 빅셀 유닛(4410, 4415)의 상부 메탈 컨택(60)에는 제1 컨택(4420, 4425)을 통하여 기준 전압 이상의 전압이 인가될 수 있다.
또한 다른 예를 들어, 상기 제2 축을 따라 배열된 빅셀 어레이의 양단에 배열된 제2 컨택(4430, 4435)은 상기 복수의 페어 빅셀 유닛(4410, 4415)의 하부 메탈 컨택(10)과 연결될 수 있다. 이때, 페어 빅셀 유닛(4410, 4415)의 하부 메탈 컨택(10)에는 제2 컨택(4430, 4435)을 통하여 n형 전압이 인가될 수 있다. 예를 들어, 페어 빅셀 유닛(4410, 4415)의 하부 메탈 컨택(10)에는 제2 컨택(4430, 4435)을 통하여 기준 전압 이하의 전압이 인가될 수 있다.
일 실시예에 따른 복수의 와이어(4440, 4450)는 상기 제1 축을 따라 배열된 복수의 페어 빅셀 유닛(4410, 4415)들을 서로 연결시키거나 페어 빅셀 유닛(4410, 4415)과 제1 컨택(4420, 4430)을 전기적으로 연결시킬 수 있다. 또한 복수의 와이어(4440, 4450)는 상기 제2 축을 따라 배열된 복수의 페어 빅셀 유닛(4410, 4415)들을 서로 연결시키거나 페어 빅셀 유닛(4410, 4415)과 제2 컨택(4430, 4435)을 전기적으로 연결시킬 수 있다.
도 86을 참조하면, 빅셀 어레이(4400)에 포함된 복수의 페어 빅셀 유닛(4410, 4415)은 개별적으로 동작할 수 있다. 빅셀 어레이(4400)에 포함된 복수의 페어 빅셀 유닛(4410, 4415)은 다른 페어 빅셀 유닛의 동작 여부와 관계 없이 각각 독립적으로 동작될 수 있다.
예를 들어, 1행 1열의 페어 빅셀 유닛을 동작시키기 위해서는 제1 컨택(4420, 4425) 중 1행에 배치된 컨택에 n형 전압을, 제2 컨택(4430, 4435) 중 1열에 배치된 컨택에 p형 전압을 인가할 수 있다.
예를 들어, 1행 1열의 페어 빅셀 유닛을 동작시키기 위해서는 제1 컨택(4420, 4425) 중 1행에 배치된 컨택에 기준 전압 이하의 전압을, 제2 컨택(4430, 4435) 중 1열에 배치된 컨택에 기준 전압 이상의 전압을 인가할 수 있다.
또한 예를 들어, 1행 2열의 페어 빅셀 유닛을 동작시키기 위해서는 제1 컨택(4420, 4425) 중 1행에 배치된 컨택에 n형 전압을, 제2 컨택(4430, 4435) 중 2열에 배치된 컨택에 p형 전압을 인가할 수 있다.
또한 예를 들어, 1행 2열의 페어 빅셀 유닛을 동작시키기 위해서는 제1 컨택(4420, 4425) 중 1행에 배치된 컨택에 기준 전압 이하의 전압을, 제2 컨택(4430, 4435) 중 2열에 배치된 컨택에 기준 전압 이상의 전압을 인가할 수 있다.
또한 예를 들어, 1행에 배치된 4개의 페어 빅셀 유닛을 모두 동작시키기 위해서는 제1 컨택(4420, 4425) 중 1행에 배치된 컨택에 n형 전압을, 제2 컨택(4430, 4435) 모두에 p형 전압을 인가할 수 있다.
또한 예를 들어, 1행에 배치된 4개의 페어 빅셀 유닛을 모두 동작시키기 위해서는 제1 컨택(4420, 4425) 중 1행에 배치된 컨택에 기준 전압 이하의 전압을, 제2 컨택(4430, 4435) 모두에 기준 전압 이상의 전압을 인가할 수 있다.
또한 예를 들어, 2행 2열의 페어 빅셀 유닛과 3행 4열의 빅셀 유닛을 동작시키기 위해서는 제1 컨택(4420, 4425) 중 2행 및 3행에 배치된 컨택에 n형 전압을, 제2 컨택(4430, 4435) 중 2열 및 4열에 배치된 컨택에 p형 전압을 인가할 수 있다.
또한 예를 들어, 2행 2열의 페어 빅셀 유닛과 3행 4열의 빅셀 유닛을 동작시키기 위해서는 제1 컨택(4420, 4425) 중 2행 및 3행에 배치된 컨택에 기준 전압 이하의 전압을, 제2 컨택(4430, 4435) 중 2열 및 4열에 배치된 컨택에 기준 전압 이상의 전압을 인가할 수 있다.
또한 예를 들어, 빅셀 어레이(4400)에 포함된 모든 페어 빅셀 유닛(4410, 4415)을 동작시키기 위해서는 제1 컨택(4420, 4425) 모두에 n형 전압을, 제2 컨택(4430, 4435) 모두에 p형 전압을 인가할 수 있다.
또한 예를 들어, 빅셀 어레이(4400)에 포함된 모든 페어 빅셀 유닛(4410, 4415)을 동작시키기 위해서는 제1 컨택(4420, 4425) 모두에 기준 전압 이하의 전압을, 제2 컨택(4430, 4435) 모두에 기준 전압 이상의 전압을 인가할 수 있다.
페어 빅셀 유닛에 포함된 복수의 빅셀 유닛(4410, 4415)은 개별적으로 동작할 수 있다. 페어 빅셀 유닛에 포함된 복수의 빅셀 유닛(4410, 4415)은 다른 빅셀 유닛의 동작 여부와 관계 없이 각각 독립적으로 동작될 수 있다.
예를 들어, 빅셀 유닛(4410)은 동작하고 다른 빅셀 유닛(4415)은 동작하지 않을 수 있다. 또한 예를 들어, 빅셀 유닛(4410)은 동작하지 않고 다른 빅셀 유닛(4415)은 동작할 수 있다.
일 실시예에 따르면, 페어 빅셀 유닛에 포함된 빅셀 유닛들의 다이오드의 방향이 반대일 수 있다.
예를 들어, 페어 빅셀 유닛에 포함된 어느 하나의 빅셀 유닛(4410)은 정방향 다이오드를 포함하고, 다른 하나의 빅셀 유닛(4415)은 역방향 다이오드를 포함할 수 있다.
또한 예를 들어, 페어 빅셀 유닛에 포함된 어느 하나의 빅셀 유닛(4410)은 역방향 다이오드를 포함하고, 다른 하나의 빅셀 유닛(4415)은 정방향 다이오드를 포함할 수 있다.
일 실시예에 따르면, 페어 빅셀 유닛에 포함된 복수의 빅셀 유닛 중 어느 하나의 빅셀 유닛(4410)은 정방향 다이오드를 포함할 수 있다.
예를 들어, 빅셀 유닛(4410)은 복수 개의 정방향 다이오드인 빅셀 이미터를 포함할 수 있다.
또한 예를 들어, 빅셀 유닛(4410)은 300개 내지 400개의 정방향 다이오드인 빅셀 이미터를 포함할 수 있다. 이때, 빅셀 유닛(4410)은 정방향 다이오드만을 포함할 수 있으나, 이에 한정되지 않는다.
일 실시예에 따르면, 페어 빅셀 유닛에 포함된 복수의 빅셀 유닛 중 다른 하나의 빅셀 유닛(4415)은 역방향 다이오드를 포함할 수 있다.
예를 들어, 빅셀 유닛(4415)은 복수 개의 역방향 다이오드인 빅셀 이미터를 포함할 수 있다.
또한 예를 들어, 빅셀 유닛(4415)은 300개 내지 400개의 역방향 다이오드인 빅셀 이미터를 포함할 수 있다. 이때, 빅셀 유닛(4415)은 역방향 다이오드만을 포함할 수 있으나, 이에 한정되지 않는다.
일 실시예에 따르면, 페어 빅셀 유닛에 포함된 복수의 빅셀 유닛 중 어느 하나의 빅셀 유닛은 제1 상부 DBR 레이어 및 제1 하부 DBR 레이어를 포함할 수 있다. 또한, 페어 빅셀 유닛에 포함된 복수의 빅셀 유닛 중 다른 하나의 빅셀 유닛은 제2 상부 DBR 레이어 및 제2 하부 DBR 레이어를 포함할 수 있다.
이때, 제1 상부 DBR 레이어와 제2 상부 DBR 레이어의 성질이 다르고, 제1 하부 DBR 레이어와 제2 하부 DBR 레이어의 성질이 다를 수 있다. 예를 들어, 제1 상부 DBR 레이어와 제2 하부 DBR 레이어는 P형으로 도핑되고, 제2 상부 DBR 레이어와 제1 하부 DBR 레이어는 N형으로 도핑될 수 있다.
그러나 제1 상부 DBR 레이어와 제2 상부 DBR 레이어의 성질은 같을 수도 있다. 예를 들어, 제1 빅셀 유닛과 제2 빅셀 유닛은 동일한 빅셀 이미터를 포함할 수도 있다.
도 87은 다른 일 실시예에 따른 빅셀 어레이를 설명하기 위한 도면이다.
도 87을 참조하면, 다른 일 실시예에 따른 빅셀 어레이(4500)는 복수의 페어 빅셀 유닛(4510, 4515)을 포함할 수 있다.
복수의 페어 빅셀 유닛(4510, 4515)에 대한 설명은 도 86을 참조하여 설명된 복수의 페어 빅셀 유닛(4410, 4415)의 설명과 중복될 수 있어, 자세한 설명은 생략하기로 한다.
복수의 컨택(4520, 4525, 4530, 4535)에 대한 설명은 도 86을 참조하여 설명된 복수의 컨택(4420, 4425, 4430, 4435)의 설명과 중복될 수 있어, 자세한 설명은 생략하기로 한다.
복수의 와이어(4540, 4550)에 대한 설명은 도 86을 참조하여 설명된 복수의 와이어(4440, 4450)의 설명과 중복될 수 있어, 자세한 설명은 생략하기로 한다.
일 실시예에 따른 빅셀 어레이(4500)는 공통 컨택(4560)을 포함할 수 있다. 공통 컨택(4560)은 전도성 물질을 포함할 수 있다. 예를 들어, 공통 컨택(4560)은 금속을 포함할 수 있다.
일 실시예에 따른 페어 빅셀 유닛에 포함된 각각의 빅셀 유닛들(4510, 4515)은 제2 컨택(4530, 4535)을 공유할 수 있다. 예를 들어, 페어 빅셀 유닛에 포함된 각각의 빅셀 유닛들(4510, 4515)은 제2 컨택(4530, 4535)과 동시에 전기적으로 연결될 수 있다.
일 실시예에 따른 공통 컨택(4560)은 상기 제1 축을 따라 배열된 복수의 페어 빅셀 유닛(4510, 4515)과 전기적으로 연결될 수 있다.
예를 들어, 공통 컨택(4560)은 상기 제1 축을 따라 배열된 복수의 페어 빅셀 유닛(4510, 4515)과 하부 메탈 컨택(60)을 통해 전기적으로 연결될 수 있다.
또한 예를 들어, 공통 컨택(4560)은 상기 제1 축을 따라 배열된 복수의 페어 빅셀 유닛(4510, 4515)과 상부 메탈 컨택(10)을 통해 전기적으로 연결될 수 있다.
일 실시예에 따른 빅셀 어레이(4500)는 복수의 컨택(4520, 4525, 4530, 4535)을 통해 전원을 공급받을 수 있다.
예를 들어, 상기 제1 축을 따라 배열된 빅셀 어레이의 양단에 배열된 제1 컨택(4520, 4525)은 상기 복수의 페어 빅셀 유닛의 하부 메탈 컨택(60)과 연결될 수 있다. 이때, 페어 빅셀 유닛의 하부 메탈 컨택(60)에는 제1 컨택(4520, 4525)을 통하여 n형 전압이 인가될 수 있다.
또한 예를 들어, 상기 제2 축을 따라 배열된 빅셀 어레이의 양단에 배열된 제2 컨택(4530, 4535)은 상기 복수의 페어 빅셀 유닛의 상부 메탈 컨택(10)과 연결될 수 있다.
이때, 페어 빅셀 유닛의 상부 메탈 컨택(10)에는 제2 컨택(4530, 4535)을 통하여 p형 전압이 인가될 수 있다. 예를 들어, 페어 빅셀 유닛의 상부 메탈 컨택(10)에는 제2 컨택(4530, 4535)을 통하여 기준 전압 이상의 전압이 인가될 수 있다.
다른 예를 들어, 상기 제1 축을 따라 배열된 빅셀 어레이의 양단에 배열된 제1 컨택(4520, 4525)은 상기 복수의 페어 빅셀 유닛의 상부 메탈 컨택(60)과 연결될 수 있다.
이때, 페어 빅셀 유닛의 상부 메탈 컨택(60)에는 제1 컨택(4520, 4525)을 통하여 p형 전압이 인가될 수 있다. 예를 들어, 페어 빅셀 유닛의 상부 메탈 컨택(60)에는 제1 컨택(4520, 4525)을 통하여 기준 전압 이상의 전압이 인가될 수 있다.
또한 다른 예를 들어, 상기 제2 축을 따라 배열된 빅셀 어레이의 양단에 배열된 제2 컨택(4530, 4535)은 상기 복수의 페어 빅셀 유닛의 하부 메탈 컨택(10)과 연결될 수 있다.
이때, 페어 빅셀 유닛의 하부 메탈 컨택(10)에는 제2 컨택(4530, 4535)을 통하여 n형 전압이 인가될 수 있다. 예를 들어, 페어 빅셀 유닛의 하부 메탈 컨택(10)에는 제2 컨택(4530, 4535)을 통하여 기준 전압 이하의 전압이 인가될 수 있다.
도 87을 참조하면, 빅셀 어레이(4500)에 포함된 복수의 페어 빅셀 유닛은 개별적으로 동작할 수 있다. 빅셀 어레이(4500)에 포함된 복수의 페어 빅셀 유닛은 다른 페어 빅셀 유닛의 동작 여부와 관계 없이 각각 독립적으로 동작될 수 있다.
복수의 페어 빅셀 유닛들의 개별적인 동작은 도 86의 설명과 중복될 수 있어 자세한 설명은 생략한다.
페어 빅셀 유닛에 포함된 복수의 빅셀 유닛은 개별적으로 동작할 수 있다. 페어 빅셀 유닛에 포함된 복수의 빅셀 유닛은 다른 빅셀 유닛의 동작 여부와 관계 없이 각각 독립적으로 동작될 수 있다.
예를 들어, 빅셀 유닛(4510)은 동작하고 다른 빅셀 유닛(4515)은 동작하지 않을 수 있다. 또한 예를 들어, 빅셀 유닛(4510)은 동작하지 않고 다른 빅셀 유닛(4515)은 동작할 수 있다.
일 실시예에 따르면, 페어 빅셀 유닛에 포함된 빅셀 유닛들의 다이오드의 방향이 반대일 수 있다.
예를 들어, 페어 빅셀 유닛에 포함된 어느 하나의 빅셀 유닛(4510)은 정방향 다이오드를 포함하고, 다른 하나의 빅셀 유닛(4515)은 역방향 다이오드를 포함할 수 있다.
또한, 다른 표현으로 페어 빅셀 유닛에 포함된 어느 하나의 빅셀 유닛(4410)은 정방향 다이오드로써의 역할을 수행하도록 회로가 구성될 수 있고, 다른 하나의 빅셀 유닛(4415)은 역방향 다이오드로써의 역할을 수행하도록 회로가 구성될 수 있다.
또한, 여기서 정방향 다이오드는 전류가 일방향으로 흐르는 빅셀 유닛을 의미하고, 역방향 다이오드는 전류가 상기 일방향의 역방향으로 흐르는 빅셀 유닛을 의미할 수 있다.
또한 예를 들어, 페어 빅셀 유닛에 포함된 어느 하나의 빅셀 유닛(4510)은 역방향 다이오드를 포함하고, 다른 하나의 빅셀 유닛(4515)은 정방향 다이오드를 포함할 수 있다.
일 실시예에 따르면, 페어 빅셀 유닛에 포함된 복수의 빅셀 유닛 중 어느 하나의 빅셀 유닛(4510)은 정방향 다이오드를 포함할 수 있다.
예를 들어, 빅셀 유닛(4510)은 복수 개의 정방향 다이오드인 빅셀 이미터를 포함할 수 있다.
또한 예를 들어, 빅셀 유닛(4510)은 300개 내지 400개의 정방향 다이오드인 빅셀 이미터를 포함할 수 있다. 이때, 빅셀 유닛(4510)은 정방향 다이오드만을 포함할 수 있으나, 이에 한정되지 않는다.
일 실시예에 따르면, 페어 빅셀 유닛에 포함된 어느 하나의 빅셀 유닛(4510)의 DBR 레이어와 다른 하나의 빅셀 유닛(4515)의 DBR 레이어가 상이할 수 있다.
예를 들어, 페어 빅셀 유닛에 포함된 어느 하나의 빅셀 유닛(4510)의 상부 DBR 레이어는 P-DBR 레이어이고, 하부 DBR 레이어는 N-DBR 레이어일 수 있다. 이때, 페어 빅셀 유닛에 포함된 다른 하나의 빅셀 유닛(4515)의 상부 DBR 레이어는 N-DBR 레이어이고, 하부 DBR 레이어는 P-DBR 레이어일 수 있다. 즉, 페어 빅셀 유닛에 포함된 빅셀 유닛들의 N-DBR, P-DBR의 위치가 상반될 수 있다.
일 실시예에 따르면, 페어 빅셀 유닛에 포함된 복수의 빅셀 유닛 중 다른 하나의 빅셀 유닛(4515)은 역방향 다이오드를 포함할 수 있다.
예를 들어, 빅셀 유닛(4515)은 복수 개의 역방향 다이오드인 빅셀 이미터를 포함할 수 있다.
또한 예를 들어, 빅셀 유닛(4515)은 300개 내지 400개의 역방향 다이오드인 빅셀 이미터를 포함할 수 있다. 이때, 빅셀 유닛(4515)은 역방향 다이오드만을 포함할 수 있으나, 이에 한정되지 않는다.
도 88은 일 실시예에 따른 빅셀 어레이의 연결 상태 및 단면도를 나타낸 도면이다.
일 실시예에 따르면, 빅셀 어레이에 포함된 빅셀 유닛(4510, 4515)들은 기판을 공유할 수 있다. 예를 들어, 빅셀 유닛(4510, 4515)들은 GaAs를 공유할 수 있다.
도 88을 참조하면, 빅셀 어레이는 복수의 페어 빅셀 유닛을 포함할 수 있다. 페어 빅셀 유닛은 복수의 빅셀 유닛을 포함할 수 있다. 예를 들어, 페어 빅셀 유닛은 하나의 빅셀 유닛(4510) 및 다른 하나의 빅셀 유닛(4515)을 포함할 수 있다.
일 실시예에 따르면, 복수의 페어 빅셀 유닛들은 제1 축을 따라 배열된 공통 컨택(4560)을 통해 전기적으로 연결될 수 있다. 또한, 페어 빅셀 유닛에 포함된 빅셀 유닛들(4510, 4515)은 제1 축을 따라 배열된 공통 컨택(4560)을 통해 전기적으로 연결될 수 있다.
일 실시예에 따르면, 복수의 페어 빅셀 유닛들은 제2 축을 따라 배열된 제2 컨택(4530, 4535) 및 와이어(도시되지 않음)을 통해 전기적으로 연결될 수 있다. 또한, 페어 빅셀 유닛에 포함된 빅셀 유닛들(4510, 4515)은 제2 축을 따라 배열된 제2 컨택(4530, 4535)을 통해 전기적으로 연결될 수 있다.
공통 컨택(4560) 및 제2 컨택(4530, 4535)에는 p형 전압이 인가될 수도 있고, n형 전압이 인가될 수도 있다. 예를 들어, 공통 컨택(4560)에는 n형 전압이 인가되고, 제2 컨택(4530, 4535)에는 p형 전압이 인가될 수도 있다.
또한 예를 들어, 공통 컨택(4560)에는 p형 전압이 인가되고, 제2 컨택(4530, 4535)에는 n형 전압이 인가될 수도 있다. 이에 한정되지 않고, 공통 컨택(4560) 및 제2 컨택(4530, 4535)에 모두 p형 전압 또는 n형 전압이 인가될 수도 있다.
공통 컨택(4560) 및 제2 컨택(4530, 4535)에는 기준 전압 이상의 전압이 인가될 수도 있고, 기준 전압 이하의 전압이 인가될 수도 있다. 예를 들어, 공통 컨택(4560)에는 기준 전압 이하의 전압이 인가되고, 제2 컨택(4530, 4535)에는 기준 전압 이상의 전압이 인가될 수도 있다.
또한 예를 들어, 공통 컨택(4560)에는 기준 전압 이상의 전압이 인가되고, 제2 컨택(4530, 4535)에는 기준 전압 이하의 전압이 인가될 수도 있다. 이에 한정되지 않고, 공통 컨택(4560) 및 제2 컨택(4530, 4535)에 모두 기준 전압 이상의 전압 또는 기준 전압 이하의 전압이 인가될 수도 있다.
일 실시예에 따르면, 페어 빅셀 유닛에 포함된 어느 하나의 빅셀 유닛(4510)과 다른 하나의 빅셀 유닛(4515)의 다이오드 방향은 반대일 수 있다. 예를 들어, 어느 하나의 빅셀 유닛(4510)은 정방향 다이오드를 포함하고, 다른 하나의 빅셀 유닛(4515)은 역방향 다이오드를 포함할 수 있다.
일 실시예에 따르면, 페어 빅셀 유닛에 포함된 어느 하나의 빅셀 유닛(4510)과 다른 하나의 빅셀 유닛(4515)의 상부 메탈 컨택과 하부 메탈 컨택의 연결은 반대일 수 있다.
예를 들어, 어느 하나의 빅셀 유닛(4510)의 상부 DBR 레이어에 전기적으로 연결되는 상부 메탈 컨택(4511)은 다른 하나의 빅셀 유닛(4515)의 하부 DBR 레이어에 전기적으로 연결되는 하부 메탈 컨택(4517)과 전기적으로 연결될 수 있다.
또한, 어느 하나의 빅셀 유닛(4510)의 하부 DBR 레이어에 전기적으로 연결되는 하부 메탈 컨택(4512)은 다른 하나의 빅셀 유닛(4515)의 상부 DBR 레이어에 전기적으로 연결되는 상부 메탈 컨택(4516)과 전기적으로 연결될 수 있다.
이때, 어느 하나의 빅셀 유닛(4510)의 하부 메탈 컨택(4512)과 다른 하나의 빅셀 유닛(4515)의 상부 메탈 컨택(4516)은 공통 컨택(4560)과 전기적으로 연결될 수 있다.
또한 이때, 어느 하나의 빅셀 유닛(4510)의 상부 메탈 컨택(4511)과 다른 하나의 빅셀 유닛(4515)의 하부 메탈 컨택(4517)은 제2 컨택(4530, 4535)과 전기적으로 연결될 수 있다.
그러나 이에 한정되지 않고, 어느 하나의 빅셀 유닛(4510)의 하부 메탈 컨택(4512)과 다른 하나의 빅셀 유닛(4515)의 상부 메탈 컨택(4516)이 제2 컨택(4530, 4535)과 전기적으로 연결되고, 어느 하나의 빅셀 유닛(4510)의 상부 메탈 컨택(4511)과 다른 하나의 빅셀 유닛(4515)의 하부 메탈 컨택(4517)이 공통 컨택(4560)과 전기적으로 연결될 수도 있다.
또한 일 실시예에 따르면, 제1 빅셀 유닛의 상부 메탈 컨택(4511) 및 제2 빅셀 유닛의 하부 메탈 컨택(4517)은 동일한 메탈 레이어로 제작될 수 있다. 또한, 제1 빅셀 유닛의 하부 메탈 컨택(4512) 및 제2 빅셀 유닛의 상부 메탈 컨택(4516)은 또 다른 동일한 메탈 레이어로 제작될 수 있다.
이때, 제1 빅셀 유닛의 상부 메탈 컨택(4511)에 전류 또는 전압을 인가하면, 제2 빅셀 유닛의 하부 메탈 컨택(4517)과 동일한 메탈 레이어이기 때문에, 제2 빅셀 유닛의 하부 메탈 컨택(4517)에도 전류 또는 전압이 흐를 수 있다.
또한 이때, 제1 빅셀 유닛의 하부 메탈 컨택(4512)에 전류 또는 전압을 인가하면, 제2 빅셀 유닛의 상부 메탈 컨택(4516)과 동일한 메탈 레이어이기 때문에, 제2 빅셀 유닛의 상부 메탈 컨택(4516)에도 전류 또는 전압이 흐를 수 있다.
이때, 제1 빅셀 유닛의 상부 메탈 컨택(4511)에 제1 전압을 인가하고, 제1 빅셀 유닛의 하부 메탈 컨택(4512)에 상기 제1 전압보다 작은 제2 전압을 인가하는 경우, 제1 빅셀 유닛의 전류 흐름은 상부 메탈 컨택(4511)으로부터 하부 메탈 컨택(4512)으로 흐르게 되어, 제1 빅셀 유닛은 동작할 수 있다.
그러나, 제1 빅셀 유닛의 상부 메탈 컨택(4511)에 제1 전압을 인가하고, 제1 빅셀 유닛의 하부 메탈 컨택(4512)에 상기 제1 전압보다 작은 제2 전압을 인가하는 경우, 제2 빅셀 유닛의 전류 흐름은 하부 메탈 컨택(4517)으로부터 상부 메탈 컨택(4516)으로 흐르게 되어, 제2 빅셀 유닛은 동작하지 않을 수 있다.
또한 이때, 제1 빅셀 유닛의 상부 메탈 컨택(4511)에 제3 전압을 인가하고, 제1 빅셀 유닛의 하부 메탈 컨택(4512)에 상기 제3 전압보다 큰 제4 전압을 인가하는 경우, 제1 빅셀 유닛의 전류 흐름은 상부 메탈 컨택(4511)으로부터 하부 메탈 컨택(4512)으로 흐르게 되어, 제1 빅셀 유닛은 동작하지 않을 수 있다.
그러나, 제1 빅셀 유닛의 상부 메탈 컨택(4511)에 제3 전압을 인가하고, 제1 빅셀 유닛의 하부 메탈 컨택(4512)에 상기 제3 전압보다 큰 제4 전압을 인가하는 경우, 제2 빅셀 유닛의 전류 흐름은 상부 메탈 컨택(4516)으로부터 하부 메탈 컨택(4517)으로 흐르게 되어, 제2 빅셀 유닛은 동작할 수 있다.
도 89는 다른 일 실시예에 따른 빅셀 어레이의 연결 상태 및 단면도를 나타낸 도면이다.
일 실시예에 따르면, 빅셀 유닛(4533, 4534)은 상부 DBR 레이어, 하부 DBR 레이어, MQW(Multi Quantum Wells), 메탈 및 기판(substrate)을 포함할 수 있다.
예를 들어, 빅셀 유닛(4533, 4534)의 상부 DBR 레이어는 P형으로 도핑되고, 하부 DBR 레이어는 N형으로 도핑될 수 있다. 또는 예를 들어, 빅셀 유닛(4533, 4534)의 상부 DBR 레이어는 N형으로 도핑되고, 하부 DBR 레이어는 P형으로 도핑될 수 있다.
일 실시예에 따르면, 빅셀 어레이에 포함된 빅셀 유닛(4533, 4534)들은 기판을 공유할 수 있다. 예를 들어, 빅셀 유닛(4533, 4534)들은 GaAs를 공유할 수 있다.
다른 일 실시예에 따르면, 빅셀 어레이에 포함된 빅셀 유닛(4533, 4534)들은 기판을 부분적으로 공유할 수 있다. 예를 들어, 빅셀 어레이에 포함된 N개의 빅셀 유닛들은 기판을 공유할 수 있다.
일 실시예에 따르면, 빅셀 유닛(4533, 4534)에 포함된 빅셀 이미터는 상부 DBR 레이어 및 하부 DBR 레이어를 포함할 수 있다.
예를 들어, 빅셀 이미터는 상부에 P-DBR 레이어 및 하부에 N-DBR 레이어를 포함할 수 있다. 또는 예를 들어, 빅셀 이미터는 상부에 N-DBR 레이어 및 하부에 P-DBR 레이어를 포함할 수 있다.
도 89(a)를 참조하면, 다른 일 실시예에 따른 빅셀 어레이는 복수의 빅셀 유닛(4533), 제1 컨택(4531), 제2 컨택(4561) 및 와이어를 포함할 수 있다.
다른 일 실시예에 따르면, 제1 컨택(4531)은 복수의 빅셀 유닛(4533)의 하부 컨택과 전기적으로 연결될 수 있다. 예를 들어, 제1 컨택(4531)은 복수의 빅셀 유닛(4533)의 N-Metal과 전기적으로 연결될 수 있다.
예를 들어, 제1 컨택(4531)은 n형 도핑 메탈일 수도 있고, 일반 메탈일 수도 있다. 제1 컨택(4531)에는 n형 전압을 인가할 수 있다.
다른 일 실시예에 따르면, 제2 컨택(4561)은 복수의 빅셀 유닛(4533)의 상부 컨택과 전기적으로 연결될 수 있다. 예를 들어, 제2 컨택(4561)과 복수의 빅셀 유닛(4533)은 와이어를 통해 전기적으로 연결될 수 있다. 또한 예를 들어, 제2 컨택(4561)은 복수의 빅셀 유닛(4533)의 P-Metal과 전기적으로 연결될 수 있다.
예를 들어, 제2 컨택(4561)은 p형 도핑 메탈일 수도 있고, 일반 메탈일 수도 있다. 제2 컨택(4561)에는 p형 전압 또는 기준 전압 이상의 전압을 인가할 수 있다.
도 89(b)를 참조하면, 또 다른 일 실시예에 따른 빅셀 어레이는 복수의 빅셀 유닛(4534), 제1 컨택(4532), 제2 컨택(4562) 및 와이어를 포함할 수 있다.
또 다른 일 실시예에 따르면, 제1 컨택(4532)은 빅셀 어레이에 포함된 빅셀 유닛 중 홀수열에 배치된 빅셀 유닛의 하부 컨택과 전기적으로 연결될 수 있다. 예를 들어, 제1 컨택(4532)은 홀수열에 배치된 빅셀 유닛의 N-Metal과 전기적으로 연결될 수 있다. 이때, 짝수열에 배치된 빅셀 유닛의 하부 컨택은 제1 컨택(4532)과 전기적으로 연결되지 않을 수 있다.
또한, 제1 컨택(4532)은 빅셀 어레이에 포함된 빅셀 유닛 중 짝수열에 배치된 빅셀 유닛의 상부 컨택과 전기적으로 연결될 수 있다. 예를 들어, 제1 컨택(4532)은 짝수열에 배치된 빅셀 유닛의 P-Metal과 전기적으로 연결될 수 있다. 이때, 제1 컨택(4532)은 짝수열에 배치된 빅셀 유닛의 상부 컨택과 와이어를 통해 전기적으로 연결될 수 있다.
또 다른 일 실시예에 따르면, 제2 컨택(4562)은 빅셀 어레이에 포함된 빅셀 유닛 중 짝수열에 배치된 빅셀 유닛의 하부 컨택과 전기적으로 연결될 수 있다. 예를 들어, 제2 컨택(4562)은 짝수열에 배치된 빅셀 유닛의 N-Metal과 전기적으로 연결될 수 있다. 이때, 홀수열에 배치된 빅셀 유닛의 하부 컨택은 제2 컨택(4562)과 전기적으로 연결되지 않을 수 있다.
또한, 제2 컨택(4562)은 빅셀 어레이에 포함된 빅셀 유닛 중 홀수열에 배치된 빅셀 유닛의 상부 컨택과 전기적으로 연결될 수 있다. 예를 들어, 제2 컨택(4562)은 홀수열에 배치된 빅셀 유닛의 P-Metal과 전기적으로 연결될 수 있다. 이때, 제2 컨택(4562)은 홀수열에 배치된 빅셀 유닛의 상부 컨택과 와이어를 통해 전기적으로 연결될 수 있다.
또 다른 일 실시예에 따르면, 제1 컨택(4532) 및 제2 컨택(4562)에는 p형 전압 또는 n형 전압이 인가될 수 있다. 예를 들어, 제1 컨택(4532) 및 제2 컨택(4562)에는 기준 전압 이상의 전압 또는 기준 전압 이하의 전압이 인가될 수 있다.
예를 들어, 제1 컨택(4532)에 n형 전압이 인가되고, 제2 컨택(4562)에 p형 전압이 인가될 경우, 빅셀 어레이에 포함된 빅셀 유닛 중 홀수열에 배치된 빅셀 유닛은 동작하고, 짝수열에 배치된 빅셀 유닛은 동작하지 않을 수 있다.
예를 들어, 제1 컨택(4532)에 기준 전압 이하의 전압이 인가되고, 제2 컨택(4562)에 기준 전압 이상의 전압이 인가될 경우, 빅셀 어레이에 포함된 빅셀 유닛 중 홀수열에 배치된 빅셀 유닛은 동작하고, 짝수열에 배치된 빅셀 유닛은 동작하지 않을 수 있다.
또한 예를 들어, 제1 컨택(4532)에 p형 전압이 인가되고, 제2 컨택(4562)에 n형 전압이 인가될 경우, 빅셀 어레이에 포함된 빅셀 유닛 중 짝수열에 배치된 빅셀 유닛은 동작하고, 홀수열에 배치된 빅셀 유닛은 동작하지 않을 수 있다.
또한 예를 들어, 제1 컨택(4532)에 기준 전압 이상의 전압이 인가되고, 제2 컨택(4562)에 기준 전압 이하의 전압이 인가될 경우, 빅셀 어레이에 포함된 빅셀 유닛 중 짝수열에 배치된 빅셀 유닛은 동작하고, 홀수열에 배치된 빅셀 유닛은 동작하지 않을 수 있다.
위와 같이, 도 89(b)에 도시된 빅셀 어레이는 제1 컨택(4532) 및 제2 컨택(4562)에 인가하는 전류 또는 전압에 따라 동작하는 빅셀 유닛이 달라질 수 있다.
또한 도 89(b)에 도시된 빅셀 어레이는 도 89(a)에 도시된 빅셀 어레이보다 컨택의 개수를 줄일 수 있다.
예를 들어, 도 89(a)에 도시된 빅셀 어레이의 컨택의 개수는 제1 컨택(4531) 4개 및 제2 컨택(4561) 2개인 반면, 도 89(b)에 도시된 빅셀 어레이의 컨택의 개수는 제1 컨택(4532) 2개 및 제2 컨택(4562) 2개일 수 있다. 컨택의 개수를 줄이므로써, 빅셀 어레이 공정상의 비용을 줄일 수 있다.
그러나, 도 89의 (a) 및 (b)보다 도 88의 빅셀 어레이의 연결 상태가 와이어의 개수를 줄일 수 있다.
예를 들어, 도 88의 빅셀 어레이는 제1 컨택(4560) 2개 및 제2 컨택(4530, 4535) 2개 각각에 와이어 연결을 하면, 4개의 와이어를 포함할 수 있다.
또한 예를 들어, 도 89의 빅셀 어레이는 제1 컨택(4531, 4532)에 4개의 와이어 연결, 제2 컨택(4561, 4562)에 4개의 와이어 연결을 하기 때문에, 총 8개의 와이어가 필요할 수 있다.
따라서, 도 88의 빅셀 어레이에 필요한 와이어의 개수는 도 89의 빅셀 어레이에 필요한 와이어의 개수보다 적을 수 있다. 공정의 단순화 및 비용의 측면에서, 와이어의 개수를 줄이는 것은 중요할 수 있다. 도 88의 빅셀 어레이와 같이, 빅셀 유닛들의 상부 메탈 컨택과 하부 메탈 컨택을 동일 메탈 레이어로 제작할 경우, 와이어의 개수를 줄일 수 있다.
도 90은 일 실시예에 따른 빅셀 어레이를 나타낸 회로도이다.
도 90을 참조하면, 빅셀 어레이(4600)는 복수의 페어 빅셀 유닛(4610, 4620)을 포함할 수 있다. 페어 빅셀 유닛은 복수의 빅셀 유닛(4610, 4620)을 포함할 수 있다. 예를 들어, 페어 빅셀 유닛은 정방향 다이오드를 포함하는 빅셀 유닛과 역방향 다이오드를 포함하는 빅셀 유닛을 포함할 수 있다.
도 90은 편의상 빅셀 유닛에 포함된 다이오드의 개수가 1개인 경우를 도시하고 있으나, 이에 한정되지 않고 빅셀 유닛은 복수 개의 다이오드를 포함할 수 있다. 예를 들어, 빅셀 유닛은 300개 내지 400개의 다이오드를 포함할 수 있다.
일 실시예에 따르면, 페어 빅셀 유닛에 포함된 유닛 중 하나의 빅셀 유닛(4610)은 정방향 다이오드를 포함하고, 다른 하나의 빅셀 유닛(4620)은 역방향 다이오드를 포함할 수 있다. 예를 들어, 페어 빅셀 유닛에 포함된 빅셀 유닛들의 다이오드 방향은 반대가 될 수 있다.
일 실시예에 따르면, 정방향 다이오드를 포함하는 빅셀 유닛(4610)의 음극(cathode)과 역방향 다이오드를 포함하는 빅셀 유닛(4620)의 양극(anode)은 전기적으로 연결되어 있을 수 있다. 또한 정방향 다이오드를 포함하는 빅셀 유닛(4610)의 양극과 역방향 다이오드를 포함하는 빅셀 유닛(4620)의 음극은 전기적으로 연결되어 있을 수 있다.
이때, 정방향 다이오드를 포함하는 빅셀 유닛(4610)의 음극(cathode)과 역방향 다이오드를 포함하는 빅셀 유닛(4620)의 양극(anode)은 X축 방향으로 배열된 제1 컨택(4520, 4525)과 연결될 수 있다. 또한 정방향 다이오드를 포함하는 빅셀 유닛(4610)의 양극과 역방향 다이오드를 포함하는 빅셀 유닛(4620)의 음극은 Y축 방향으로 배열된 제2 컨택(4530, 4535)과 연결될 수 있다.
또는 정방향 다이오드를 포함하는 빅셀 유닛(4610)의 음극(cathode)과 역방향 다이오드를 포함하는 빅셀 유닛(4620)의 양극(anode)은 Y축 방향으로 배열된 제2 컨택(4530, 4535)과 연결될 수 있다. 또한 정방향 다이오드를 포함하는 빅셀 유닛(4610)의 양극과 역방향 다이오드를 포함하는 빅셀 유닛(4620)의 음극은 X축 방향으로 배열된 제1 컨택(4520, 4525)과 연결될 수 있다.
일 실시예에 따르면, 제1 컨택(X1, X2, X3, X4)에 n형 전압이 인가되고, 제2 컨택(Y1, Y2, Y3, Y4)에 p형 전압이 인가될 수 있다. 예를 들어, 제1 컨택(X1, X2, X3, X4)에 기준 전압 이하의 전압이 인가되고, 제2 컨택(Y1, Y2, Y3, Y4)에 기준 전압 이상의 전압이 인가될 수 있다. 이때, 페어 빅셀 유닛 중 어느 하나의 빅셀 유닛(4610)만이 동작하고, 나머지 빅셀 유닛(4620)은 동작하지 않을 수 있다.
또한 일 실시예에 따르면, 제1 컨택(X1, X2, X3, X4)에 p형 전압이 인가되고, 제2 컨택(Y1, Y2, Y3, Y4)에 n형 전압이 인가될 수 있다. 예를 들어, 제1 컨택(X1, X2, X3, X4)에 기준 전압 이상의 전압이 인가되고, 제2 컨택(Y1, Y2, Y3, Y4)에 기준 전압 이하의 전압이 인가될 수 있다. 이때, 페어 빅셀 유닛 중 어느 하나의 빅셀 유닛(4620)만이 동작하고, 나머지 빅셀 유닛(4610)은 동작하지 않을 수 있다.
페어 빅셀 유닛에 포함된 빅셀 유닛들(4610, 4620)의 다이오드 방향이 반대이므로, 빅셀 유닛들 중 어느 하나가 동작하는 경우, 다른 어느 하나는 동작하지 않게 될 수 있다.
위와 같이 복수의 빅셀 유닛들을 페어 빅셀 유닛으로 묶어 제1 컨택 및 제2 컨택에 연결시키는 경우, 각각의 빅셀 유닛들을 컨택에 연결시켜 동작하는 경우보다 컨택 및 와이어의 개수와 사이즈를 줄일 수 있다.
또한, 제1 컨택 및 제2 컨택에 인가하는 전압에 따라서 각각의 빅셀 유닛을 동작시킬 수 있으므로, 동작의 편의성이 도출될 수 있다.
또한, 페어 빅셀 유닛에 포함된 빅셀 유닛들(4610, 4620)은 동시에 동작할 수 없기 때문에, 빅셀 유닛의 발열로 인한 빅셀 어레이의 온도 상승의 취약점을 보완할 수 있다. 예를 들어, 페어 빅셀 유닛에 포함된 빅셀 유닛들(4610, 4620)이 모두 동작되는 경우보다 어느 하나의 빅셀 유닛(4610 또는 4620)만이 동작되는 경우의 온도상승률이 적을 수 있다.
빅셀 어레이의 온도 상승은 빅셀에서 출력되는 파장의 변화로 이어지고, 파장의 변화는 측정 거리와 연관될 수 있으므로, 본 발명의 온도 상승을 줄일 수 있는 페어 빅셀 유닛의 동작 방법은 라이다 분야에서 큰 장점이 될 수 있다.
도 91 내지 도 97은 빅셀 어레이의 다양한 실시예를 나타낸 도면이다.
도 91에 도시된 바와 같이, 일 실시예에 따르면 빅셀 어레이의 제1 컨택(X1, X2, X3, X4)에는 n형 전압이 인가될 수 있다. 또한 빅셀 어레이의 제2 컨택(Y1, Y2, Y3, Y4)에는 p형 전압이 인가될 수 있다.
예를 들어, 빅셀 어레이의 제1 컨택(X1, X2, X3, X4)에는 기준 전압 이하의 전압이 인가되고, 빅셀 어레이의 제2 컨택(Y1, Y2, Y3, Y4)에는 기준 전압 이상의 전압이 인가될 수 있다.
이때, 페어 빅셀 유닛들 중 어느 하나의 빅셀 유닛만이 동작할 수 있다. 예를 들어, 빅셀 유닛에 올바른 전압이 인가된 빅셀 유닛만이 동작하고, 올바르지 않은 전압이 인가된 빅셀 유닛은 동작할 수 없다.
도 91를 참조하면, 점선으로 표시된 빅셀 유닛들만이 동작할 수 있다. 빅셀 어레이에 포함된 빅셀 유닛들은 열(column) 단위로 동작할 수 있다.
도 92에 도시된 바와 같이, 일 실시예에 따르면 빅셀 어레이의 제1 컨택(X1, X2, X3, X4)에는 p형 전압이 인가될 수 있다. 또한 빅셀 어레이의 제2 컨택(Y1, Y2, Y3, Y4)에는 n형 전압이 인가될 수 있다.
예를 들어, 빅셀 어레이의 제1 컨택(X1, X2, X3, X4)에는 기준 전압 이상의 전압이 인가되고, 빅셀 어레이의 제2 컨택(Y1, Y2, Y3, Y4)에는 기준 전압 이하의 전압이 인가될 수 있다.
도 92를 참조하면, 점선으로 표시된 빅셀 유닛들만이 동작할 수 있다. 빅셀 어레이에 포함된 빅셀 유닛들은 도 90과는 다른 열(column) 단위로 동작할 수 있다.
도 93에 도시된 바와 같이, 일 실시예에 따르면 빅셀 어레이의 제1 컨택 중 X1 및 X3에는 n형 전압이 인가될 수 있고, X2 및 X4에는 p형 전압이 인가될 수 있다. 또한 빅셀 어레이의 제2 컨택(Y1, Y2, Y3, Y4)에는 p형 전압이 인가될 수 있다.
예를 들어, 빅셀 어레이의 제1 컨택 중 X1 및 X3에는 기준 전압 이하의 전압이 인가되고, X2 및 X4에는 기준 전압 이상의 전압이 인가되고, 빅셀 어레이의 제2 컨택(Y1, Y2, Y3, Y4)에는 기준 전압 이상의 전압이 인가될 수 있다.
이때, 페어 빅셀 유닛들 중 어느 하나의 빅셀 유닛만이 동작할 수 있다. 예를 들어, 빅셀 유닛에 올바른 전압이 인가된 빅셀 유닛만이 동작하고, 올바르지 않은 전압이 인가된 빅셀 유닛은 동작할 수 없다.
또는, 페어 빅셀 유닛들에 포함된 빅셀 유닛들 모두 동작하지 않을 수 있다. 예를 들어, 페어 빅셀 유닛에 포함된 빅셀 유닛 모두에 올바르지 않은 전압이 인가된 경우, 빅셀 유닛 모두는 동작할 수 없다.
도 93을 참조하면, 점선으로 표시된 빅셀 유닛들만이 동작할 수 있다. 빅셀 어레이에 포함된 빅셀 유닛들은 행(row) 단위로 동작할 수 있다.
도 94에 도시된 바와 같이, 일 실시예에 따르면 빅셀 어레이의 제1 컨택 중 X1, X2 및 X3에는 n형 전압이 인가될 수 있고, X4에는 p형 전압이 인가될 수 있다. 또한 빅셀 어레이의 제2 컨택 중 Y1 및 Y4에는 n형 전압이 인가될 수 있고, Y2 및 Y3에는 p형 전압이 인가될 수 있다.
예를 들어, 빅셀 어레이의 제1 컨택 중 X1, X2 및 X3에는 기준 전압 이하의 전압이 인가되고, X4에는 기준 전압 이상의 전압이 인가되고, 빅셀 어레이의 제2 컨택 중 Y1 및 Y4에는 기준 전압 이하의 전압이 인가될 수 있고, Y2 및 Y3에는 기준 전압 이상의 전압이 인가될 수 있다.
도 94를 참조하면, 점선으로 표시된 빅셀 유닛들만이 동작할 수 있다. 빅셀 어레이에 포함된 빅셀 유닛들은 행단위 또는 열단위 이외에도 개별적으로 동작할 수 있다.
도 95에 도시된 바와 같이, 일 실시예에 따르면 빅셀 어레이의 제1 컨택 중 X1 및 X3에는 n형 전압이 인가될 수 있고, X2 및 X4에는 p형 전압이 인가될 수 있다. 또한 빅셀 어레이의 제2 컨택 중 Y1 및 Y3에는 n형 전압이 인가될 수 있고, Y2 및 Y4에는 p형 전압이 인가될 수 있다.
예를 들어, 빅셀 어레이의 제1 컨택 중 X1 및 X3에는 기준 전압 이하의 전압이 인가되고, X2 및 X4에는 기준 전압 이상의 전압이 인가되고, 빅셀 어레이의 제2 컨택 중 Y1 및 Y3에는 기준 전압 이하의 전압이 인가될 수 있고, Y2 및 Y4에는 기준 전압 이상의 전압이 인가될 수 있다.
도 95를 참조하면, 점선으로 표시된 빅셀 유닛들만이 동작할 수 있다. 빅셀 어레이에 포함된 빅셀 유닛들은 행단위 또는 열단위 이외에도 개별적으로 동작할 수 있다.
도 96에 도시된 바와 같이, 일 실시예에 따르면 빅셀 어레이의 제1 컨택 중 X2에만 n형 전압이 인가될 수 있다. 또한 빅셀 어레이의 제2 컨택 중 Y3에만 p형 전압이 인가될 수 있다.
예를 들어, 빅셀 어레이의 제1 컨택 중 X2에만 기준 전압 이하의 전압이 인가되고, 빅셀 어레이의 제2 컨택 중 Y3에만 기준 전압 이상의 전압이 인가될 수 있다.
도 96을 참조하면, 점선으로 표시된 빅셀 유닛만이 동작할 수 있다. 빅셀 어레이에 포함된 빅셀 유닛들 중 어느 하나의 빅셀만 개별적으로 동작할 수도 있다.
도 97에 도시된 바와 같이, 일 실시예에 따르면 빅셀 어레이의 제1 컨택 중 X1에는 n형 전압이 인가되고, X4에는 p형 전압이 인가될 수 있다. 또한 빅셀 어레이의 제2 컨택 중 Y1에는 p형 전압이 인가되고, Y4에는 n형 전압이 인가될 수 있다.
예를 들어, 빅셀 어레이의 제1 컨택 중 X1에는 기준 전압 이하의 전압이 인가되고, X4에는 기준 전압 이상의 전압이 인가되고, 빅셀 어레이의 제2 컨택 중 Y1에는 기준 전압 이상의 전압이 인가되고, Y4에는 기준 전압 이하의 전압이 인가될 수 있다.
도 97을 참조하면, 점선으로 표시된 빅셀 유닛들이 동작할 수 있다. 빅셀 어레이에 포함된 빅셀 유닛들은 행단위 또는 열단위 이외에도 빅셀 유닛 하나씩 개별적으로 동작할 수도 있다.
도 98은 일 실시예에 따른 빅셀 어레이의 동작 순서도를 나타낸 도면이다.
도 98을 참조하면, 빅셀 어레이의 동작은 제1 컨택에 전류를 인가하는 단계(S4100) 및 제2 컨택에 전류를 인가하는 단계(S4200)를 포함할 수 있다.
일 실시예에 따르면, 빅셀 어레이의 제1 컨택에 전류를 인가하는 단계(S4100)가 수행될 수 있다. 그 후 빅셀 어레이의 제2 컨택에 전류를 인가하는 단계(S4200)가 수행될 수 있다. 제1 컨택 및 제2 컨택에 전류를 인가함으로써, 빅셀 어레이에 포함된 빅셀 유닛이 동작할 수 있다.
다른 일 실시예에 따르면, 빅셀 어레이의 제2 컨택에 전류를 인가하는 단계(S4200)가 먼저 수행될 수 있다. 그 후 빅셀 어레이의 제1 컨택에 전류를 인가하는 단계(S4100)가 수행될 수 있다.
도 99는 일 실시예에 따른 빅셀 어레이의 동작 시퀀스를 나타낸 도면이다.
도 99를 참조하면, 일 실시예에 따른 빅셀 어레이(4580)는 4X4의 빅셀 유닛(4570)을 포함할 수 있으나, 이에 한정되지 않고, 5X5, 6X6, 7X7, 8X8, 12X12, 24X24, 64X64 등의 빅셀 유닛(4570)을 포함할 수 있다.
도 99(a)를 참조하면, 일 실시예에 따른 빅셀 어레이(4580)는 빅셀 유닛(4570)에 기재된 숫자에 따른 동작 시퀀스에 의해 동작할 수 있다.
예를 들어, 1행 1열의 빅셀 유닛이 첫번째로 동작할 수 있다. 그 다음, 3행 3열의 빅셀 유닛이 두번째로 동작할 수 있다. 그 다음, 1행 3열의 빅셀 유닛이 세번째로 동작할 수 있다. 그 다음, 3행 1열의 빅셀 유닛이 네번째로 동작할 수 있다. 그 다음, 1행 4열의 빅셀 유닛이 다섯번째로 동작할 수 있다. 그 다음, 3행 2열의 빅셀 유닛이 여섯번째로 동작할 수 있다. 그 다음, 1행 2열의 빅셀 유닛이 일곱번째로 동작할 수 있다. 그 다음, 3행 4열의 빅셀 유닛이 여덟번째로 동작할 수 있다. 그 다음, 2행 1열의 빅셀 유닛이 아홉번째로 동작할 수 있다. 그 다음, 4행 3열의 빅셀 유닛이 열번째로 동작할 수 있다. 그 다음, 2행 3열의 빅셀 유닛이 열한번째로 동작할 수 있다. 그 다음, 4행 1열의 빅셀 유닛이 열두번째로 동작할 수 있다. 그 다음, 2행 4열의 빅셀 유닛이 열세번째로 동작할 수 있다. 그 다음, 4행 2열의 빅셀 유닛이 열네번째로 동작할 수 있다. 그 다음, 2행 2열의 빅셀 유닛이 열다섯번째로 동작할 수 있다. 그 다음, 4행 4열의 빅셀 유닛이 열여섯번째로 동작할 수 있다.
도 99(b)를 참조하면, 다른 일 실시예에 따른 빅셀 어레이(4580)는 빅셀 유닛(4570)에 기재된 숫자에 따른 동작 시퀀스에 의해 동작할 수 있다.
예를 들어, 1행 1열의 빅셀 유닛이 첫번째로 동작할 수 있다. 그 다음, 1행 2열의 빅셀 유닛이 두번째로 동작할 수 있다. 그 다음, 3행 1열의 빅셀 유닛이 세번째로 동작할 수 있다. 그 다음, 3행 3열의 빅셀 유닛이 네번째로 동작할 수 있다. 그 다음, 2행 2열의 빅셀 유닛이 다섯번째로 동작할 수 있다. 그 다음, 2행 4열의 빅셀 유닛이 여섯번째로 동작할 수 있다. 그 다음, 4행 2열의 빅셀 유닛이 일곱번째로 동작할 수 있다. 그 다음, 4행 4열의 빅셀 유닛이 여덟번째로 동작할 수 있다. 그 다음, 1행 2열의 빅셀 유닛이 아홉번째로 동작할 수 있다. 그 다음, 1행 4열의 빅셀 유닛이 열번째로 동작할 수 있다. 그 다음, 3행 2열의 빅셀 유닛이 열한번째로 동작할 수 있다. 그 다음, 3행 4열의 빅셀 유닛이 열두번째로 동작할 수 있다. 그 다음, 2행 1열의 빅셀 유닛이 열세번째로 동작할 수 있다. 그 다음, 2행 3열의 빅셀 유닛이 열네번째로 동작할 수 있다. 그 다음, 4행 1열의 빅셀 유닛이 열다섯번째로 동작할 수 있다. 그 다음, 4행 3열의 빅셀 유닛이 열여섯번째로 동작할 수 있다.
빅셀 어레이(4580)에 포함된 빅셀 유닛(4570)들이 도 98과 같은 시퀀스를 따를 경우, 빅셀 어레이(4580)의 온도 상승을 최소화할 수 있다. 제1 빅셀 유닛이 동작한 후, 제1 빅셀 유닛과 인접한 제2 빅셀 유닛이 동작할 경우, 제1 빅셀 유닛의 동작으로 인한 온도 상승에 제2 빅셀 유닛의 동작으로 인한 온도 상승의 영향이 더해져 빅셀 어레이(4580)의 온도가 상승할 수 있다.
그러나, 제1 빅셀 유닛이 동작한 후, 제1 빅셀 유닛과 인접하지 않은 제3 빅셀 유닛이 동작할 경우, 제1 빅셀 유닛의 동작으로 인한 온도 상승에 제3 빅셀 유닛의 동작으로 인한 온도 상승의 영향은 제2 빅셀 유닛의 동작으로 인한 온도 상승의 영향보다 적을 수 있다.
따라서, 제1 빅셀 유닛이 동작한 후, 제1 빅셀 유닛과 인접한 제2 빅셀 유닛이 동작하는 경우보다 제1 빅셀 유닛과 인접하지 않은 제3 빅셀 유닛이 동작하는 경우에 빅셀 어레이(4580)의 온도 상승이 줄어들 수 있다.
빅셀 어레이(4580)의 동작은 도 99에 도시된 동작 시퀀스에 한정되지 않고, 직전에 동작한 빅셀 유닛과 인접하지 않는 빅셀 유닛을 동작시키는 다른 시퀀스에 따를 수 있다.
도 100은 일 실시예에 따른 빅셀 어레이가 포함된 웨이퍼를 나타낸 도면이다.
도 100을 참조하면, 웨이퍼(4700)는 빅셀 어레이(4720)를 포함할 수 있다. 도 100에는 웨이퍼(4700)의 형상이 원형으로 도시되어 있으나, 이에 한정되지 않고 다각형의 형상 또는 다른 형태로도 나타날 수 있다. 도 100에는 빅셀 어레이(4720)의 형상이 다각형으로 도시되어 있으나, 이에 한정되지 않고 원형 또는 다른 형태로도 나타날 수 있다.
일 실시예에 따르면, 웨이퍼(4700)는 빅셀 어레이(4720)가 포함되지 않은 영역인 제1 영역(4710)과 빅셀 어레이(4720)를 포함하는 영역인 제2 영역으로 나뉘어질 수 있다.
제1 영역(4710)은 빅셀 어레이(4720)를 포함하지 않으므로, 사이즈의 축소를 위해 소잉(sawing) 공정에 의해 잘려질 수도 있다. 그러나, 제1 영역(4710)을 자르지 않고 빅셀 어레이(4720)를 위한 컨택 영역으로 활용할 수도 있다.
예를 들어, 제1 영역(4710)에 빅셀 어레이(4720)에 전원을 공급하기 위한 컨택을 배치할 수도 있다. 또한 예를 들어, 제1 영역(4710)에 다각형의 빅셀 어레이(4720)가 아닌 다른 형태의 빅셀 어레이를 추가적으로 배치할 수도 있다.
예를 들어, 제1 영역(4710)에 빅셀 어레이(4720)에서 방출되는 레이저 빔의 파장과 다른 파장을 방출하는 다른 빅셀 어레이를 추가적으로 배치할 수도 있다.
또한 예를 들어, 제1 영역(4710)에 빅셀 어레이(4720)에서 방출되는 레이저 빔의 다이버전스(divergence) 각도와 다른 다이버전스 각도를 가지는 레이저 빔을 방출하는 다른 빅셀 어레이를 추가적으로 배치할 수도 있다.
도 101은 일 실시예에 따른 웨이퍼 및 빅셀 어레이의 레이아웃을 나타낸 도면이다.
도 101을 참조하면, 빅셀 어레이(4720)는 웨이퍼(4700) 내에 배치될 수 있다. 웨이퍼(4700)는 가용 영역(4716) 및 불가용 영역(4718)을 포함할 수 있다.
일 실시예에 따르면, 가용 영역(4716)은 가용 경계(4715)의 내부일 수 있다. 가용 영역(4716)은 웨이퍼 내부에 배치되어 있는 반도체가 동작할 수 있는 영역일 수 있다.
일 실시예에 따르면, 불가용 영역(4718)은 가용 경계(4715)와 웨이퍼(4700)의 엣지(4717) 사이의 영역일 수 있다. 불가용 영역(4718)은 내부에 배치되어 있는 반도체가 동작할 확률이 낮은 영역일 수 있다. 또는 불가용 영역(4718)은 도핑 농도가 균일하지 않은 영역일 수 있다.
빅셀 어레이(4720)가 불가용 영역(4718)에 배치되는 경우, 빅셀 어레이(4720)가 동작하지 않을 수 있다. 특히, 빅셀 어레이(4720) 중 빅셀 이미터들이 배치되는 영역인 액티브 영역(4723)이 불가용 영역(4718)에 포함되는 경우, 빅셀 이미터들이 레이저 빔을 출력하지 않을 수 있다.
그러나, 빅셀 어레이(4720)를 가용 영역(4716)에만 배치하는 경우, 웨이퍼(4700)의 영역 활용도가 낮을 수 있다.
예를 들어, 빅셀 어레이(4720) 중 빅셀 이미터들이 배치되지 않는 영역은 불가용 영역(4718)에 포함될 수도 있다.
즉, 빅셀 어레이(4720)가 가용 영역(4716)에만 배치되지 않고, 가용 영역(4716) 및 불가용 영역(4718) 모두에 배치될 수 있다.
도 102는 다른 일 실시예에 따른 웨이퍼 및 빅셀 어레이의 레이아웃을 나타낸 도면이다.
도 102를 참조하면, 빅셀 어레이(4720)는 가용 영역(4716)에만 배치되지 않고, 가용 영역(4716) 및 불가용 영역(4718) 모두에 배치될 수 있다.
일 실시예에 따르면, 빅셀 어레이(4720)는 엣지(4721), 빅셀 이미터를 포함하는 액티브 영역(4723) 및 빅셀 이미터를 포함하지 않는 비액티브 영역(4725)을 포함할 수 있다. 이때, 비액티브 영역(4725)에는 메탈 컨택 또는 passivation이 포함될 수 있다.
일 실시예에 따르면, 웨이퍼의 영역 활용도를 향상시키기 위해, 빅셀 어레이(4720)가 불가용 영역(4718)에도 배치가 될 수 있다.
예를 들어, 빅셀 어레이(4720)의 비액티브 영역(4725) 및 엣지(4721)의 일부가 불가용 영역(4718)에 포함될 수 있다. 이때, 빅셀 어레이(4720)의 액티브 영역(4723)은 불가용 영역(4718)에 포함되지 않을 수 있다. 이때, 빅셀 어레이(4720)의 액티브 영역(4723)의 경계가 가용 영역(4716)과 불가용 영역(4718)의 경계에 맞닿을 수 있다.
빅셀 어레이(4720)의 비액티브 영역(4725) 및 엣지(4721)의 일부가 불가용 영역(4718)에 포함됨으로써, 가용 영역(4716) 내에서 빅셀 어레이(4720)의 액티브 영역(4723)이 차지하는 비율이 증가할 수 있다. 또는 가용 영역(4716) 내에 배치될 수 있는 빅셀 이미터의 개수가 증가할 수 있다.
도 103 내지 105는 일 실시예에 따른 라이다 장치의 측정 거리를 설명하기 위한 도면이다.
도 103를 참조하면, 일 실시예에 따른 라이다 장치는 제1 대상체(5010), 제2 대상체(5020) 및 제3 대상체(5030)를 향해 레이저를 조사할 수 있다. 이 때, 상기 라이다 장치(5000)는 상기 제1, 제2 및 제3 대상체(5010,5020,5030) 각각을 향해 제1 레이저(5011), 제2 레이저(5021) 및 제3 레이저(5031)을 조사할 수 있다. 예를 들어, 상기 라이다 장치(5000)는 상기 제1, 제2 및 제3 레이저(5011,5021,5031) 각각을 동시에 조사할 수 있으며, 적어도 하나 이상의 레이저를 독립적으로 조사할 수 있다.
또한, 상기 라이다 장치(5000)는 상기 제1 대상체(5010)를 향해 조사된 상기 제1 레이저(5011)가 상기 제1 대상체(5010)로부터 반사된 경우 반사된 제1 레이저(5012)를 획득할 수 있다. 이 때, 상기 라이다 장치(5000)는 상기 반사된 제1 레이저(5012)의 수광 시간에 기초하여 상기 라이다 장치(5000)로부터 상기 제1 대상체(5010)까지의 거리를 측정할 수 있다. 예를 들어, 상기 라이다 장치(5000)는 상기 제1 레이저(5011)가 출력된 시간 및 상기 반사된 제1 레이저(5012)가 획득된 시간에 기초하여 상기 라이다 장치(5000)로부터 상기 제1 대상체(5010)까지의 거리를 측정할 수 있으나, 이에 한정되지 않는다.
또한, 상기 라이다 장치(5000)는 상기 제2 대상체(5020)를 향해 조사된 상기 제2 레이저(5021)가 상기 제2 대상체(5020)로부터 반사된 경우 반사된 제2 레이저(5022)를 획득할 수 있다. 이 때, 상기 라이다 장치(5000)는 상기 반사된 제2 레이저(5022)의 수광 시간에 기초하여 상기 라이다 장치(5000)로부터 상기 제2 대상체(5020)까지의 거리를 측정할 수 있다. 예를 들어, 상기 라이다 장치(5000)는 상기 제2 레이저(5021)가 출력된 시간 및 상기 반사된 제2 레이저(5022)가 획득된 시간에 기초하여 상기 라이다 장치(5000)로부터 상기 제2 대상체(5020)까지의 거리를 측정할 수 있으나, 이에 한정되지 않는다.
또한, 상기 라이다 장치(5000)는 상기 제3 대상체(5030)를 향해 조사된 상기 제3 레이저(5031)가 상기 제3 대상체(5030)로부터 반사된 경우 반사된 제3 레이저(5032)를 획득할 수 있다. 이 때, 상기 라이다 장치(5000)는 상기 반사된 제3 레이저(5032)의 수광 시간에 기초하여 상기 라이다 장치(5000)로부터 상기 제3 대상체(5030)까지의 거리를 측정할 수 있다. 예를 들어, 상기 라이다 장치(5000)는 상기 제3 레이저(5031)가 출력된 시간 및 상기 반사된 제3 레이저(5032)가 획득된 시간에 기초하여 상기 라이다 장치(5000)로부터 상기 제3 대상체(5030)까지의 거리를 측정할 수 있으나, 이에 한정되지 않는다.
또한, 상기 라이다 장치(5000)로부터 상기 제2 대상체(5020)까지의 거리는 상기 라이다 장치(5000)로부터 상기 제1 대상체(5010)까지의 거리보다 멀 수 있다. 이 때, 상기 제1 레이저(5011) 및 상기 제2 레이저(5021)의 세기가 동일한 경우 상기 제1 대상체(5010)로부터 반사된 제1 레이저(5012)의 세기는 상기 제2 대상체(5020)로부터 반사된 제2 레이저(5022)보다 클 수 있다. 따라서, 상기 라이다 장치(5000)에서 획득된 상기 제1 대상체(5010)와 관련된 신호의 크기는 상기 라이다 장치(5000)에서 획득된 상기 제2 대상체(5020)와 관련된 신호의 크기보다 클 수 있다.
또한, 상기 라이다 장치(5000)로붙터 상기 제3 대상체(5030)까지의 거리는 상기 라이다 장치(5000)로부터 상기 제2 대상체(5020)까지의 거리보다 멀 수 있다. 이 때, 상기 제2 레이저(5021) 및 상기 제3 레이저(5031)의 세기가 동일한 경우 상기 제2 대상체(5020)로부터 반사된 제2 레이저(5022)의 세기는 상기 제3 대상체(5030)로부터 반사된 제3 레이저(5032)보다 클 수 있다. 따라서, 상기 라이다 장치(5000)에서 획득된 상기 제2 대상체(5020)와 관련된 신호의 크기는 상기 라이다 장치(5000)에서 획득된 상기 제3 대상체(5030)와 관련된 신호의 크기보다 클 수 있다.
따라서, 상기 라이다 장치(5000)에서 획득된 신호의 세기는 레이저를 반사하는 대상체까지의 거리와 관련성이 있을 수 있다. 예를 들어, 상기 라이다 장치(5000)로부터 대상체까지의 거리가 멀어짐에 따라 상기 라이다 장치(5000)에서 획득된 신호의 크기가 작아질 수 있으며, 대상체까지의 거리가 가까워짐에 따라 상기 라이다 장치(5000)에서 획득된 신호의 크기가 커질 수 있으나, 이에 한정되지는 않는다.
또한, 상기 라이다 장치(5000)에서 획득된 상기 제3 대상체(5030)와 관련된 신호의 크기는 상기 제3 대상체(5030)와의 거리 측정을 위해 필요한 신호의 크기보다 작을 수 있다. 이 때, 거리 측정을 위해 필요한 신호의 크기보다 작은 것의 의미는 절대적인 신호 크기의 작음을 의미할 수도 있으며, 거리 측정을 위한 기준 신호의 크기보다 작음을 의미할 수도 있고, 노이즈 대비 신호의 크기가 구분되지 않을만큼 작음을 의미할 수도 있으나, 이에 한정되지 않는다.
결국, 상기 라이다 장치(5000)에서 획득된 상기 제3 대상체(5030)와 관련된 신호의 크기가 거리 측정을 위해 필요한 신호의 크기보다 작은 경우 상기 라이다 장치(5000)는 상기 제3 대상체까지의 거리를 측정하지 못할 수 있다.
도 104를 참조하면, 일 실시예에 따른 라이다 장치는 제4 대상체(5040) 및 제5 대상체(5050)를 향해 레이저를 조사할 수 있다. 이 때, 상기 라이다 장치(5000)는 상기 제4 및 제5 대상체(5040,5050)각각을 향해 제4 레이저(5041) 및 제5 레이저(5051)를 조사할 수 있다. 예를 들어, 상기 라이다 장치(5000)는 상기 제4 및 제5 레이저(5041,5051) 각각을 동시에 조사할 수 있으며, 적어도 하나 이상의 레이저를 독립적으로 조사할 수 있다.
또한, 상기 라이다 장치(5000)가 상기 제4 및 제5 레이저(5041,5051)를 이용해 상기 제4 및 제5 대상체(5040,5050)까지의 거리를 측정할 수 있음은 전술한 바와 같으므로 상세한 내용은 생략하기로 한다.
또한, 상기 제4 대상체(5040) 및 제5 대상체(5050)는 상기 라이다 장치(5000)로부터 동일한 거리에 위치하나 서로 반사율이 다른 물체일 수 있다. 예를 들어, 상기 제4 대상체(5040)의 반사율은 상기 제5 대상체(5050)의 반사율 보다 높을 수 있으나, 이에 한정되지 않는다. 또한, 상기 제4 및 제5 대상체(5040, 5050)의 반사율은 각각의 색상, 재질 입사각 등에 기초하여 결정될 수 있으나, 이에 한정되지 않는다.
상기 제4 대상체(5040)의 반사율이 상기 제5 대상체(5050)의 반사율 보다 높은 경우, 상기 제4 레이저(5041)가 상기 제4 대상체(5040)로부터 반사된 제4 레이저(5042)의 크기는 상기 제5 레이저(5051)가 상기 제5 대상체(5050)로부터 반사된 제5 레이저(5052)의 크기 보다 클 수 있다. 따라서, 상기 라이다 장치(5000)에서 획득된 상기 제4 대상체(5040)와 관련된 신호의 크기는 상기 라이다 장치(5000)에서 획득된 상기 제5 대상체(5050)와 관련된 신호의 크기보다 클 수 있다.
따라서, 상기 라이다 장치(5000)에서 획득된 신호의 세기는 레이저를 반사하는 대상체의 반사율과 관련성이 있을 수 있다. 예를 들어, 대상체의 반사율이 작아짐에 따라 상기 라이다 장치(5000)에서 획득된 신호의 크기가 작아질 수 있으며, 대상체의 반사율이 커짐에 따라 상기 라이다 장치(5000)에서 획득된 신호의 크기가 커질 수 있으나, 이에 한정되지는 않는다.
또한, 상기 라이다 장치(5000)에서 획득된 상기 제5 대상체(5050)와 관련된 신호의 크기는 상기 제5 대상체(5050)와의 거리 측정을 위해 필요한 신호의 크기보다 작을 수 있다. 이 때, 거리 측정을 위해 필요한 신호의 크기보다 작은 것의 의미는 절대적인 신호 크기의 작음을 의미할 수도 있으며, 거리 측정을 위한 기준 신호의 크기보다 작음을 의미할 수도 있고, 노이즈 대비 신호의 크기가 구분되지 않을 만큼 작음을 의미할 수도 있으나, 이에 한정되지 않는다.
결국, 상기 라이다 장치(5000)에서 획득된 상기 제3 대상체(5050)와 관련된 신호의 크기가 거리 측정을 위해 필요한 신호의 크기보다 작은 경우 상기 라이다 장치(5000)는 상기 제5 대상체까지의 거리를 측정하지 못할 수 있다.
도 105를 참조하면, 일 실시예에 따른 라이다 장치는 제6 대상체(5060) 및 제7 대상체(5070)를 향해 레이저를 조사할 수 있다. 이 때, 상기 라이다 장치(5000)는 상기 제6 및 제7 대상체(5060,5070)각각을 향해 제6 레이저(5061) 및 제7 레이저(5071)를 조사할 수 있다. 예를 들어, 상기 라이다 장치(5000)는 상기 제6 및 제7 레이저(5061,5071) 각각을 동시에 조사할 수 있으며, 적어도 하나 이상의 레이저를 독립적으로 조사할 수 있다.
또한, 상기 제6 및 제7 레이저(5061,5071)는 서로 다른 세기로 조사될 수 있다. 예를 들어, 상기 제7 레이저(5071)의 세기는 상기 제6 레이저(5061)의 세기 보다 클 수 있으나, 이에 한정되지 않는다.
또한, 상기 제6 및 제7 레이저(5061,5071)는 하나의 프레임 안에서 조사될 수 있으며, 서로 다른 프레임에서 조사될 수도 있다. 예를 들어, 제1 프레임에서 상기 제6 레이저(5061)가 조사되며, 제1 프레임과 다른 제2 프레임에서 상기 제7 레이저(5071)가 조사될 수 있으며, 또는 제1 프레임의 제1 시점에서 상기 제6 레이저(5061)가 조사되며, 제1 프레임의 제2 시점에서 상기 제7 레이저(5071)가 조사될 수도 있다.
또한, 도 105에 도시된 바와 같이 상기 라이다 장치(5000)에서 획득된 상기 제6 대상체(5060)와 관련된 신호의 크기는 상기 제6 대상체(5060)와의 거리 측정을 위해 필요한 신호의 크기보다 작을 수 있다. 상기 라이다 장치(5000)에서 획득된 상기 제6 대상체(5060)와 관련된 신호의 크기가 거리 측정을 위해 필요한 신호의 크기보다 작은 원인은 상술한 바들과 같이 상기 라이다 장치(5000)로부터 상기 제6 대상체(5060)까지의 거리가 멀기 때문일 수 있으며, 상기 제6 대상체(5060)의 반사율이 낮기 때문일 수 있으나, 이에 한정되지 않는다.
또한, 상기 제7 대상체(5070)의 거리, 반사율 등의 조건은 상기 제6 대상체(5060)와 실질적으로 동일할 수 있다. 예를 들어, 상기 제7 대상체(5070)는 상기 라이다 장치(5000)로부터 상기 제6 대상체(5060)까지의 거리와 동일한 거리 이격되어 있을 수 있으며, 상기 제7 대상체(5070)의 반사율은 상기 제6 대상체(5060)의 반사율과 실질적으로 동일할 수 있다.
다만, 상기 제7 대상체(5070)를 향해 조사되는 상기 제7 레이저(5071)는 상기 제6 대상체(5060)를 향해 조사되는 상기 제6 레이저(5061)의 세기 보다 클 수 있다. 이 경우, 상기 라이다 장치(5000)에서 획득된 상기 제7 대상체(5070)와 관련된 신호의 크기는 상기 제7 대상체(5070)와의 거리 측정을 위해 필요한 신호의 크기보다 클 수 있다.
그러므로, 상기 라이다 장치(5000)에서 획득된 신호의 세기는 출력되는 레이저의 세기와 관련성이 있을 수 있다. 예를 들어, 상기 라이다 장치(5000)로부터 출력되는 레이저의 세기가 강해질수록 동일한 조건(반사율 등)에서 획득된 신호의 세기가 강해질 수 있으며, 이는 측정 거리를 향상시키는 조건을 만족시킬 수 있다.
결국, 상기 라이다 장치(5000)에서 획득된 상기 제6 대상체(5060)와 관련된 신호의 크기는 거리 측정을 위해 필요한 신호의 크기보다 작으나, 상기 제7 대상체(5070)와 관련된 신호의 크기는 거리 측정을 위해 필요한 신호의 크기보다 클 수 있다.
따라서, 상기 라이다 장치(5000)는 상기 제6 대상체(5060)까지의 거리를 측정하지 못할 수 있으나, 상기 제7 대상체(5070)까지의 거리를 측정할 수 있다.
결국, 상기 라이다 장치(5000)의 다양한 주변 상황에서 측정거리를 향상시키고 정확도를 향상시키기 위해 상기 라이다 장치(5000)로부터 출력되는 레이저의 세기를 증가시켜야 할 수 있으나, 이에 한정되지는 않는다.
도 106은 라이다 장치의 Eye-safety에 대하여 설명하기 위한 도면이다.
도 106을 참조하면, 일 실시예에 따른 라이다 장치는 레이저를 이용하여 주변 환경을 스캔할 수 있다.
구체적으로, 일 실시예에 따른 라이다 장치(5000)는 주변 환경을 향해 레이저(5081)를 조사할 수 있다. 이 때, 상기 레이저(5081)의 조사 방향은 지속적으로 변할 수 있다. 예를 들어, 상기 라이다 장치(5000)는 제1 지점을 향해 제1 레이저를 조사할 수 있으며, 제2 지점을 향해 제2 레이저는 조사할 수 있다. 이 때, 상기 제1 및 제2 레이저는 동시에 조사될 수 있으며, 서로 상이한 시간에 독립적으로 조사 될 수도 있다.
또한, 일 실시예에 따른 라이다 장치(5000)는 조사된 레이저를 이용하여 스캔 포인트를 생성할 수 있다. 이 때, 스캔 포인트는 레이저가 조사된 위치 및 레이저가 반사된 지점까지의 거리를 포함하여 생성될 수 있다.
또한, 일 실시예에 따른 라이다 장치(5000)는 조사되는 레이저를 이용하여 시야각(FOV : Field of View)을 형성할 수 있다. 예를 들어, 수평 방향으로 -60도 내지 +60도 범위로 레이저를 조사하고, 수직 방향으로 -30도 내지 +30도 범위로 레이저를 조사하는 경우 수직 시야각(FOV(V)) 60도 및 수평 시야각(FOV(H)) 120도를 형성할 수 있다. 따라서, 이 경우 상기 라이다 장치(5000)는 상기 라이다 장치(5000)로부터 수평방향으로 120도 범위 수직 방향으로 60도 범위에 존재하는 대상체를 감지하거나, 대상체와의 거리를 측정할 수 있다.
이 때, 상기 라이다 장치(5000)가 설치되는 환경에서 상기 라이다 장치(5000)의 시야각 내에 사람(5082)가 존재할 수 있다. 이 경우, 상기 라이다 장치(5000)에서 출력되는 레이저의 적어도 일부는 상기 사람(5082)의 눈으로 조사될 수 있으며, 상기 레이저(5081)의 세기가 상기 사람(5082)의 눈에 영향을 미칠 수 있다.
따라서, 상기 라이다 장치(5000)에서 출력되는 레이저(5081)은 상기 사람(5082)의 눈 건강에 영향을 미치지 않기 위한 Eye-safety 조건을 만족해야 할 수 있다.
결국 상기 라이다 장치(5000)는 측정거리 및 정확도를 향상시키기 위해 출력되는 레이저(5081)의 세기를 증가시켜야 할 수 있으나, 상기 사람(5082)의 눈 건강에 영향을 미치지 않기 위해 일정 세기 이하로 레이저(5082)를 조사해야 할 수 있다.
따라서, Eye-safety 조건을 만족하되 측정거리를 향상시키기 위한 레이저 출력부의 설계가 필요할 수 있으며, 이하에서는 Eye-safety 조건을 만족하되 측정거리를 향상시키기 위한 레이저 출력부에 대해 설명하기로 한다.
도 107 및 도 108은 일 실시예에 따른 레이저의 다이버전스를 설명하기 위한 도면이다.
도 107 및 도 108을 참조하면, 일 실시예에 따른 레이저 출력부(5100)는 레이저(5110)를 출력할 수 있다. 이 때, 상기 레이저 출력부(5100)에서 출력된 상기 레이저(5110)는 일정 각도 이상으로 확산되어 조사될 수 있다. 예를 들어, 상기 레이저(5110)는 최초 출력된 레이저와 평행한 크기(5111)보다 커지는 방향으로 출력될 수 있다. 구체적으로 상기 레이저(5110)가 일정 각도 이상으로 확산되어 조사됨에 따라, 상기 레이저(5110)의 스팟 사이즈는 일정 거리에서 최초 출력된 레이저와 평행한 크기(5111)보다 확산된 크기(5112)만큼 커질 수 있다.
또한, 상기 레이저 출력부(5100)으로부터 출력된 레이저(5110)는 거리에 따라 스팟 사이즈가 변할 수 있다. 예를 들어, 제1 거리에서 상기 레이저(5110)는 제1 스팟(5120) 사이즈를 가질 수 있으며, 상기 제1 거리 보다 먼 제2 거리에서 상기 레이저(5110)는 제2 스팟(5130) 사이즈을 가질 수 있다. 이 때, 도 109에 도시된 바와 같이 상기 레이저(5110)의 다이버전스각도에 의하여 상기 제2 스팟(5130) 사이즈 는 상기 제1 스팟(5120) 사이즈 보다 클 수 있다.
또한, 상기 레이저 출력부(5100)으로부터 출력된 레이저(5110)는 거리에 따라 광밀도가 변할 수 있다. 예를 들어, 상기 제1 거리에서 상기 레이저(5110)는 제1 스팟(5120)에 따른 제1 광밀도를 가질 수 있으며, 상기 제2 거리에서 상기 레이저는 제2 스팟(5130)에 따른 제2 광밀도를 가질 수 있다. 이 때, 상기 제1 광밀도는 상기 제2 광밀도 보다 클 수 있으며, 이는 상기 레이저(5110)의 다이버전스 각도에 의해 제2 거리에서 제2 스팟(5130)의 사이즈가 제1 거리에서 제1 스팟(5120) 사이즈 보다 크나 동일한 에너지를 포함하고 있어야 하기 때문일 수 있다.
따라서, 상기 레이저 출력부(5100)에서 출력된 상기 레이저(5110)가 다이버전스 각도를 가지고 확산되는 경우 거리가 멀어짐에 따라 상기 레이저(5110)의 스팟 사이즈는 커지고 광 밀도는 감소할 수 있다.
도 109은 일 실시예에 따른 레이저의 프로파일을 이용하여 다이버전스 각도를 설명하기 위한 도면이다.
도 109을 참조하면, 일 실시예에 따른 레이저의 프로파일은 가우시안 형태로 형성될 수 있다. 다만, 이에 한정되지는 않으며, 상기 레이저의 프로파일은 논 가우시안, 탑햇 등 다양한 형태로 형성될 수 있다.
또한, 일 실시예에 따른 레이저의 다이버전스 각도는 상기 레이저의 프로파일 및 세기에 기초하여 결정될 수 있다. 예를 들어, 상기 레이저의 프로파일이 가우시안 형태로 형성되는 경우, 상기 레이저의 다이버전스 각도는 상기 레이저의 중심 세기로부터 기준 세기가 되는 지점일 수 있다.
이 때, 상기 기준세기는 상기 레이저의 중심 세기의 10%, 20%, 30%, 40%, 50%, 60%, 70%, 80&, 90% 또는 100% 가 되는 세기일 수 있으나, 이에 한정되지 않는다.
또한, 상기 기준 세기는 상기 레이저 중심 세기의 1/e2가 되는 세기일 수 있으나, 이에 한정되지 않는다.
따라서, 이하에서는 설명의 편의를 위해 다이버전스 각도 내의 레이저를 레이저로 지칭할 수 있다. 예를 들어, 도 109을 참조하면, 다이버전스 각도 내에서 레이저의 중심세기로부터 기준 세기 이상이 되는 레이저를 레이저로 지칭할 수 있다.
도 110 및 도 111은 일 실시예에 따른 복수개의 레이저 출력 소자를 포함하는 레이저 출력부를 설명하기 위한 도면이다.
도 110을 참조하면, 일 실시예에 따른 레이저 출력부(5200)는 제1 레이저 출력소자(5210) 및 제2 레이저 출력 소자(5220)를 포함할 수 있다. 이 때, 상기 제1 및 제2 레이저 출력 소자(5210,5220)는 VCSEL(Vertical Cavity Surface Emitting Laser)를 포함할 수 있으며, 복수개의 VCSEL을 포함하는 VCSEL Unit을 포함할 수 있으나 이에 한정되지 않는다. 또한, 상기 제1 및 제2 레이저 출력 소자(5210,5220)는 복수개의 VCSEL을 포함하는 VCSEL Unit을 포함하는 VCSEL Array를 포함할 수 있으나 이에 한정되지 않는다.
또한, 상기 레이저 출력 소자들이 VCSEL Unit 또는 VCSEL Array를 포함하는 경우 상기 레이저 출력 소자들로부터 출력되는 레이저의 세기, 밀도 등의 파라미터들은 상기 VCSEL Unit 또는 VCSEL Array에 포함되는 VCSEL emitter로부터 출력되는 레이저들의 평균 값을 의미할 수 있으나, 이에 한정되지는 않는다.
또한, 상기 제1 레이저 출력 소자(5210)는 제1 레이저(5211)를 출력할 수 있으며, 상기 제2 레이저 출력 소자(5220)는 제2 레이저(5221)를 출력할 수 있다. 이 때, 상기 제1 및 제2 레이저(5211,5221)는 각각 다이버전스 각도를 가질 수 있다.
또한, 상기 제1 레이저(5211) 및 상기 제2 레이저(5221)는 상기 레이저 출력부로부터 거리가 멀어짐에 따라 스팟 사이즈가 확장될 수 있다.
또한, 상기 제1 레이저(5211) 및 상기 제2 레이저(5221)는 상기 레이저 출력부로부터 일정 거리 이후에 오버랩 될 수 있다. 이 때, 오버랩은 상기 제1 및 제2 레이저(5211,5221)의 일부가 공간상으로 동일한 영역에 조사되는 것을 의미할 수 있다. 예를 들어, 도 111을 참조하면, 제1 거리에서 상기 제1 레이저(5211)의 스팟(5212)은 상기 제1 거리에서 상기 제2 레이저(5221)의 스팟(5222)과 오버랩되지 않을 수 있으나, 상기 제1 거리보다 먼 제2 거리에서 상기 제1 레이저(5211)의 스팟(5213)은 상기 제2 거리에서 상기 제2 레이저(5221)의 스팟(5223)과 오버랩 될 수 있다.
또한, 상기 제1 레이저(5211) 및 상기 제2 레이저(5221)는 상기 레이저 출력부로부터 거리가 멀어짐에 따라 광 밀도가 감소할 수 있다. 예를 들어, 상기 제1 거리에서 상기 제1 레이저(5211)의 스팟(5212)의 광 밀도는 상기 제2 거리에서 상기 제1 레이저(5211)의 스팟(5213)의 광 밀도보다 클 수 있다.
또한, 상기 제1 레이저(5211) 및 상기 제2 레이저(5221)는 동시에 출력될 수 있다. 이 때, 상기 제1 레이저(5211) 및 상기 제2 레이저(5221)가 동시에 출력되는 경우 상기 레이저 출력부로부터 일정 거리 이후에 상기 제1 및 제2 레이저(5211,5221)가 오버랩 될 수 있다.
또한, 상기 제1 및 제2 레이저(5211,5221)가 동시에 출력되어 오버랩되는 경우 상기 제1 및 제2 레이저(5211,5221)가 오버랩되는 영역의 광 밀도가 증가될 수 있다. 예를 들어, 상기 제2 거리에서 상기 제1 레이저(5211)의 스팟(5213)과 상기 제2 레이저(5221)의 스팟(5223)이 오버랩 되는 영역(5230)에서의 광밀도는 상기 제1 및 제2 레이저(5211,5221)의 오버랩에 의해 증가될 수 있다.
또한, 상기 제1 및 제2 레이저(5211,5221)가 스팟 내에서 동일한 광밀도를 갖는 경우 상기 제2 거리에서 상기 제1 및 제2 레이저(5211,5221)가 오버랩 되는 영역(5230)의 광밀도는 상기 제1 및 제2 레이저(5211,5221)가 오버랩 되지 않는 영역에 비해 2배의 광밀도를 가질 수 있다.
따라서, 상기 제1 및 제2 레이저(5211,5221)가 오버랩 되는 영역에서의 레이저의 세기는 상기 제1 및 제2 레이저(5211,5221)가 오버랩되지 않는 영역에서의 레이저 세기보다 클 수 있으며, 상기 레이저 출력부(5200)가 라이다 장치에 부착되는 경우 상기 제1 및 제2 레이저(5211,5221)가 오버랩 되는 영역에서의 측정거리는 상기 제1 및 제2 레이저(5211,5221)가 오버랩되지 않는 영역에서의 측정거리보다 클 수 있다.
도 112는 일 실시예에 따른 레이저의 다이버전스에 따른 오버랩 거리를 설명하기 위한 도면이다.
도 112를 참조하면, 일 실시예에 따른 제1 레이저 출력부(5300)는 제1 레이저 출력 소자(5310) 및 제2 레이저 출력 소자(5320)를 포함할 수 있으며, 제2 레이저 출력부(5400)는 제3 레이저 출력 소자(5410) 및 제4 레이저 출력 소자(5420)를 포함할 수 있다. 이 때, 각각의 레이저 출력 소자는 VCSEL 등 다양한 레이저 출력 소자가 될 수 있음은 상술한 바 상세한 설명은 생략하기로 한다.
또한, 상기 제1 레이저 출력부(5300)에 포함되는 상기 제1 레이저 출력 소자(5310) 및 상기 제2 레이저 출력 소자(5320)는 제1 레이저(5311) 및 제2 레이저(5321)가 제1 다이버전스 각도를 가지도록 각각 출력할 수 있다. 예를 들어, 상기 제1 및 제2 레이저 출력 소자(5310,5320)는 각각 제1 및 제2 레이저(5311,5321)가 1.2도의 다이버전스 각도를 가지도록 출력할 수 있으나, 이에 한정되지 않는다.
또한, 상기 제2 레이저 출력부(5400)에 포함되는 상기 제3 레이저 출력 소자(5410) 및 상기 제4 레이저 출력 소자(5420)는 제3 레이저(5411) 및 제4 레이저(5421)가 제2 다이버전스 각도를 가지도록 각각 출력할 수 있다. 예를 들어, 상기 제3 및 제4 레이저 출력 소자(5410,5420)는 각각 제1 및 제2 레이저(5411,5421)가 1.8도의 다이버전스 각도를 가지도록 출력할 수 있으나, 이에 한정되지 않는다.
또한, 상기 제3 및 제4 레이저(5411,5421)의 제2 다이버전스 각도는 상기 제1 및 제2 레이저(5311,5321)의 제1 다이버전스 각도보다 크도록 설정될 수 있으나 이에 한정되지 않는다.
또한, 상기 제1 및 제2 레이저 출력 소자(5310,5320)는 제1 거리만큼 이격되어 배치될 수 있으며, 상기 제3 및 제4 레이저 출력 소자(5410,5420)는 제2 거리만큼 이격되어 배치될 수 있다. 이 때, 상기 제1 거리 및 상기 제2 거리는 동일할 수 있으나, 이에 한정되지 않고 상이할 수 있다.
또한, 레이저 출력부에 포함되는 레이저 출력 소자들 간의 이격 거리가 동일한 경우 레이저 출력 소자에서 출력되는 레이저의 다이버전스 각도에 따라 레이저 간에 오버랩되는 거리가 변경될 수 있다. 보다 구체적으로, 레이저 출력소자에서 출력되는 레이저의 다이버전스 각도가 커짐에 따라 레이저 간에 오버랩되는 거리가 감소할 수 있다.
예를 들어, 도 112에 도시된 바와 같이, 상기 제1 거리와 상기 제2 거리가 동일하며, 상기 제1 다이버전스 각도가 상기 제2 다이버전스 각도보다 작은 경우, 상기 제1 및 제2 레이저(5311,5321)가 오버랩 되는 거리(5330)는 상기 제3 및 제4 레이저(5411,5421)가 오버랩 되는 거리(5430)보다 멀 수 있다.
보다 구체적으로, 상기 제1 및 제2 레이저 출력 소자 (5310,5320)가 상호간에 1cm 이격되어 있으며, 상기 제1 및 제2 레이저(5311,5321) 의 제1 다이버전스 각도가 1.2도인 경우, 상기 제1 및 제2 레이저(5311,5321)가 오버랩 되는 거리(5330)는 약 47cm 가 될 수 있다.
또한, 상기 제3 및 제4 레이저 출력 소자(5410,5420)가 상호간에 1cm 이격되어 있으며, 상기 제3 및 제4 레이저(5411,5421)의 제2 다이버전스 각도가 1.8도인 경우, 상기 제3 및 제4 레이저(5411,5421)가 오버랩되는 거리(5430)는 약 31cm가 될 수 있다.
도 113은 레이저 출력 소자 사이의 거리에 따른 레이저의 오버랩 거리를 설명하기 위한 도면이다.
도 113을 참조하면, 일 실시예에 따른 제1 레이저 출력부(5500)는 제1 레이저 출력 소자(5510) 및 제2 레이저 출력 소자(5520)를 포함할 수 있으며, 제2 레이저 출력부(5600)는 제3 레이저 출력 소자(5610) 및 제4 레이저 출력 소자(5620)를 포함할 수 있다. 이 때, 각각의 레이저 출력 소자는 VCSEL 등 다양한 레이저 출력 소자가 될 수 있음은 상술한 바 상세한 설명은 생략하기로 한다.
또한, 상기 제1 레이저 출력부(5500)에 포함되는 상기 제1 레이저 출력 소자(5510) 및 상기 제2 레이저 출력 소자(5520)는 제1 레이저(5511) 및 제2 레이저(5521)가 제1 다이버전스 각도를 가지도록 각각 출력할 수 있다. 예를 들어, 상기 제1 및 제2 레이저 출력 소자(5510,5520)는 각각 제1 및 제2 레이저(5511,5521)가 1.2도의 다이버전스 각도를 가지도록 출력할 수 있으나, 이에 한정되지 않는다.
또한, 상기 제2 레이저 출력부(5600)에 포함되는 상기 제3 레이저 출력 소자(5610) 및 상기 제4 레이저 출력 소자(5620)는 제3 레이저(5611) 및 제4 레이저(5621)가 제2 다이버전스 각도를 가지도록 각각 출력할 수 있다. 예를 들어, 상기 제3 및 제4 레이저 출력 소자(5610,5620)는 각각 제1 및 제2 레이저(5611,5621)가 1.2도의 다이버전스 각도를 가지도록 출력할 수 있으나, 이에 한정되지 않는다.
또한, 상기 제1 다이버전스 각도와 상기 제2 다이버전스 각도는 동일하도록 설정될 수 있으나, 이에 한정되지 않는다.
또한, 상기 제1 및 제2 레이저 출력 소자(5510,5520)는 제1 거리만큼 이격되어 배치될 수 있으며, 상기 제3 및 제4 레이저 출력 소자(5610,5620)는 제2 거리만큼 이격되어 배치될 수 있다. 이 때, 상기 제1 거리 및 상기 제2 거리는 상이할 수 있으나, 이에 한정되지 않고 동일할 수 있다.
또한, 레이저 출력부에 포함되는 레이저 출력 소자에서 출력되는 레이저의 다이버전스 각도가 동일한 경우 레이저 출력 소자들 간의 이격 거리에 따라 레이저 간에 오버랩되는 거리가 변경될 수 있다. 보다 구체적으로 레이저 출력 소자들간의 이격 거리가 커짐에 따라 레이저 간에 오버랩되는 거리가 커질 수 있다.
예를 들어, 도 113에 도시된 바와 같이, 상기 제1 다이버전스 각도와 상기 제2 다이버전스 각도가 동일하며, 상기 제3 및 제4 레이저 출력 소자(5610,5620) 사이의 거리(5640)가 상기 제1 및 제2 레이저 출력 소자(5510,5520) 사이의 거리(5540)보다 큰 경우, 상기 제3 및 제4 레이저(5611,5621)가 오버랩 되는 거리(5430)는 상기 제1 및 제2 레이저 (5511,5521)가 오버랩 되는 거리(5530)보다 멀 수 있다.
보다 구체적으로, 상기 제1 및 제2 레이저 출력 소자(5510,5520)가 상호간에 1cm 이격되어 있으며, 상기 제1 및 제2 레이저(5511,5521)의 제1 다이버전스 각도가 1.2도인 경우 상기 제1 및 제2 레이저(5511,5521)가 오버랩 되는 거리(5530)는 약 47cm가 될 수 있다.
또한, 상기 제3 및 제4 레이저 출력 소자(5610,5620)가 상호간에 2cm 이격되어 있으며, 상기 제3 및 제4 레이저(5610,5620)의 제2 다이버전스 각도가 1.2도인 경우, 상기 제3 및 제4 레이저(5611,5621)가 오버랩되는 거리(5630)는 약 94cm가 될 수 있다.
따라서, 도 112 및 도 113를 통해 상술한 바를 종합해 보았을 때, 복수개의 레이저 출력 소자들에서 출력된 레이저들이 오버랩되는 거리는 복수개의 레이저 출력 소자들 간의 이격 거리 및 복수개의 레이저 출력 소자들에서 출력되는 레이저의 다이버전스 각도와 관련있음을 알 수 있다.
즉, 두 개의 레이저 출력 소자 사이의 거리를 d, 두 개의 레이저 출력 소자에서 출력되는 각각의 레이저의 다이버전스 각도를  두 개의 레이저 출력부에서 출력되는 레이저들이 오버랩 되는 거리를 D로 하였을 때, 하기와 같은 수학식을 만족할 수 있다.
두 개의 레이저 출력부에서 출력되는 레이저들이 오버랩 되는 거리를 D로 하였을 때, 하기와 같은 수학식을 만족할 수 있다.

결국 하나의 다이버전스 각도에 대한 레이저 출력 소자 사이의 거리(d) 와 레이저들이 오버랩되는 거리(D)는 선형적인 관계를 가질 수 있으며, 이는 도 114의 그래프를 통해 표현될 수 있다.
도 114는 레이저 출력 소자 사이의 거리와 오버랩 거리와의 상관 관계를 다이버전스 각도 별로 표현한 그래프이다.
따라서, 도 114 및 상술한 수학식을 참고하는 경우 다이버전스 각도 및 레이저 출력 소자 사이의 거리를 조절함으로써 원하는 오버랩 거리를 설계할 수 있다.
도 115은 Eye-safety 기준을 설명하기 위한 도면이다.
도 106을 통해 상술한 바와 같이 라이다 장치에서 조사되는 레이저로 인해 사람의 눈 건강에 영향을 미치지 않는 기준이 마련될 수 있다.
라이다 장치에서 조사되는 레이저로인해 사람의 눈 건강에 영향을 미치지 않도록 하기 위해서는 라이다 장치의 사용 상황에서 사람이 접근할 수 있는 최소 거리에 사람의 눈이 위치하는 경우에도 영향을 미치지 않도록 설계할 필요성이 있다.
또한, 사람의 눈으로 수광되는 광 에너지가 사람의 눈 건강에 영향을 미치지 않도록 설계할 필요성이 있다.
따라서, 기준 거리에서 기준 면적을 통과하는 광 에너지가 사람의 눈 건강에 영향을 미치지 않는 경우, 라이다 장치의 사용 상황에서 레이저가 사람의 눈 건강에 영향을 미치지 않을 수 있다.
예를 들어, 레이저 출력부(5100)로부터 기준 거리(5150)만큼 떨어진 지점에서 사람의 눈 크기에 대응될 수 있는 기준 면적(5160)내에 수광되는 광 에너지가 사람의 눈 건강에 영향을 미치지 않을 정도인 경우 라이다 장치의 사용 상황에서 레이저가 사람의 눈 건강에 영향을 미치지 않을 수 있다.
보다 구체적으로, 레이저 출력부(5100)로부터 10cm만큼 떨어진 지점에서 7mm의 지름을 갖는 원형 면적 내에 수광되는 레이저의 에너지가 사람의 눈 건강에 영향을 미치지 않는 경우 라이다 장치의 사용 상황에서 레이저가 사람의 눈 건강에 영향을 미치지 않을 수 있다. 다만, 기준 거리(5150) 및 기준 면적(5160)은 라이다 장치의 설치 위치, 환경 등에 따라 가변될 수 있다.
도 116은 일 실시예에 따른 레이저 출력부의 기준거리와 오버랩 거리를 설명하기 위한 도면이다.
도 116을 참조하면, 일 실시예에 따른 레이저 출력부(5700)는 제1 레이저 출력 소자(5710) 및 제2 레이저 출력 소자(5720)를 포함할 수 있으며, 이 때, 각각의 레이저 출력 소자는 VCSEL 등 다양한 레이저 출력 소자가 될 수 있음은 상술한 바 상세한 설명은 생략하기로 한다.
또한, 상기 제1 레이저 출력 소자(5710)는 제1 레이저(5711)를 출력할 수 있으며, 상기 제1 레이저(5711)는 제1 다이버전스 각도를 가질 수 있다.
또한, 상기 제2 레이저 출력 소자(5720)는 제2 레이저(5721)를 출력할 수 있으며, 상기 제2 레이저(5721)는 제2 다이버전스 각도를 가질 수 있다.
이 때, 상기 제1 및 제2 다이버전스 각도는 동일할 수 있으나, 이에 한정되지 않고 상이할 수도 있다.
또한, 상기 제1 및 제2 레이저(5711,5721)는 제1 거리(5730)에서 제1 및 제2 광밀도를 가질 수 있다. 이 때, 상기 제1 거리(5730)는 Eye-safety를 위한 기준 거리일 수 있다.
또한, 상기 제1 및 제2 레이저 출력 소자(5710,5720)는 각각 서로 독립적으로 레이저를 출력할 수 있다. 예를 들어, 상기 제1 레이저 출력 소자(5710)가 상기 제1 레이저(5711)를 출력한 후 일정시간이 지난 후에 상기 제2 레이저 출력 소자(5720)가 상기 제2 레이저(5721)를 출력할 수 있다.
또한, 상기 제1 및 제2 레이저(5711,5721)의 상기 제1 거리(5730)에서의 제1 및 제2 광밀도는 사람의 눈 건강에 영향을 미치지 않는 광밀도일 수 있다.
따라서, 상기 제1 레이저(5711)가 상기 제1 거리(5730)에서 사람의 눈 건강에 영향을 미치지 않는 제1 광밀도를 가지는 경우, 상기 제1 레이저(5711)의 상기 제1 거리(5730)보다 먼 거리에서의 광밀도는 상기 제1 광밀도 이하가 되므로 사람의 눈 건강에 영향을 미치지 않을 수 있다.
또한, 상기 제2 레이저(5721)가 상기 제1 거리(5730)에서 사람의 눈 건강에 영향을 미치지 않는 제2 광밀도를 가지는 경우, 상기 제2 레이저(5721)의 상기 제1 거리(5730)보다 먼 거리에서의 광밀도는 상기 제2 광밀도 이하가 되므로 사람의 눈 건강에 영향을 미치지 않을 수 있다.
또한, 상기 제1 및 제2 레이저 출력 소자(5710,5720)는 동일한 시간에 레이저를 출력할 수 있다. 예를 들어, 상기 제1 및 제2 레이저 출력 소자(5710,5720)는 동시에 상기 제1 및 제2 레이저(5711,5721)를 출력할 수 있다.
이 경우, 상기 제1 및 제2 레이저(5711,5721)의 일 부분이 오버랩 됨에 따라 오버랩 되는 영역에서의 광밀도가 증가되어 레이저를 이용한 측정 거리가 향상될 수 있다.
다만, 상기 제1 및 제2 레이저(5711,5721)각각은 사람의 눈 건강에 영향을 미치지 않을 수 있으나, 상기 제1 및 제2 레이저(5711,5721)이 오버랩됨에 따라 오버랩 되는 영역에서의 광밀도가 증가되어 사람의 눈 건강에 영향을 미치게 될 수 있다.
예를 들어, 상기 제1 및 제2 레이저(5711,5721)각각은 상기 제1 거리(5730)에서 사람의 눈 건강에 영향을 미치지 않을 정도의 광밀도를 가지나, 상기 제1 및 제2 레이저(5711,5721)이 오버랩 되는 거리가 도38에 도시된 바와 다르게 상기 제1 거리(5730) 이하인 경우 오버랩 되는 영역에서 광밀도가 증가되어 사람의 눈 건강에 영향을 미치게 될 수 있다.
따라서, 도 116에 도시된 바와 같이 상기 제1 및 제2 레이저(5711,5721) 가 오버랩되는 거리(5740)는 상기 제1 거리(5730) 이상이어야 할 수 있다.
또한, 상기 제1 및 제2 레이저(5711,5721)가 오버랩 되는 거리(5740)는 상기 제1 및 제2 레이저 출력 소자(5710,5720)사이의 이격거리 및 상기 제1 및 제2 레이저(5711,5721)의 다이버전스 각도를 이용하여 설계될 수 있음은 도 110 내지 도 113를 통하여 상세히 설명한 바 상세한 설명은 생략하기로 한다.
도 117은 레이저 출력 소자로부터 출력된 레이저의 광 밀도와 레이저 출력 소자로부터의 거리 사이의 상관 관계를 다이버전스 각도 별로 표현한 그래프이다.
도 117를 참조하면, 그래프의 X축은 레이저 출력 소자로부터의 거리를 의미할 수 있으며, Y축은 광밀도를 의미할 수 있다. 보다 구체적으로, 그래프의 Y축은 기준 거리에서의 광밀도를 100%로하여 광 밀도를 퍼센트로 나타낸 것일 수 있다.
또한, 상기 그래프를 참조하면, 다이버전스 각도 별로 레이저의 광밀도와 레이저 출력 소자로부터의 거리 사이의 상관 관계를 알 수 있다.
보다 구체적으로, 다이버전스 각도가 클수록 레이저 출력 소자로부터 거리가 멀어짐에 따라 광 밀도가 감소하는 정도가 클 수 있다. 예를 들어, 0.7도의 다이버전스 각도를 가지는 레이저의 경우 기준 거리에서 100%의 광밀도를 가지기 위해서 400% 이상의 광 밀도를 가지는 레이저를 출력해야 할 수 있으나, 0.2도의 다이버전스 각도를 가지는 레이저의 경우 기준 거리에서 100%의 광밀도를 가지기 위해서 200% 이하의 광밀도를 가지는 레이저를 출력해야 할 수 있다.
또한, 레이저의 다이버전스 각도에 따라서 50%의 광밀도를 가지는 거리가 상이할 수 있다. 예를 들어, 0.7도의 다이버전스 각도를 가지는 레이저의 광밀도가 50%가 되는 거리는 0.2도의 다이버전스 각도를 가지는 레이저의 광밀도가 50%가 되는 거리보다 가까울 수 있다.
따라서, 다이버전스 각도에 따라 기준 거리의 광밀도의 50%가 되는 거리를 결정할 수 있다.
또한, 복수개의 레이저 출력 소자를 이용하는 경우 기준 거리에서의 광밀도에 비해 광밀도가 50%가 되는 거리가 중요할 수 있다. 예를 들어, 복수개의 레이저 출력 소자에서 출력된 각각의 레이저가 오버랩되는 경우 오버랩되는 영역의 광밀도가 증가하게 되지만, 상기 각각의 레이저가 오버랩되는 거리가 각각의 레이저의 광밀도가 기준거리에서의 광밀도에 비해 광밀도가 50% 이하가 되는 거리인 경우 오버랩되는 영역의 증가된 광밀도가 기준 거리에서의 광밀도를 초과하지 않을 수 있다. 따라서, 이 경우 오버랩되는 영역의 증가된 광밀도 역시 사람의 눈 건강에 영향을 미치지 않을 수 있다.
따라서, 이를 이용하여, 사람의 눈건강에 영향을 미치지 않되 측정 거리를 향상시키는 레이저 출력부의 설계가 가능하며, 상세한 내용은 후술하기로 한다.
도 118은 일 실시예에 따른 레이저 출력부의 기준 거리와 오버랩 거리를 설명하기 위한 도면이다.
도 118을 참조하면, 일 실시예에 따른 레이저 출력부(5700)는 제1 레이저 출력 소자(5750) 및 제2 레이저 출력 소자(5760)를 포함할 수 있으며, 이 때, 각각의 레이저 출력 소자는 VCSEL 등 다양한 레이저 출력 소자가 될 수 있음은 상술한 바 상세한 설명은 생략하기로 한다.
또한, 상기 제1 레이저 출력 소자(5750)는 제1 레이저(5751)를 출력할 수 있으며, 상기 제1 레이저(5751)는 제1 다이버전스 각도를 가질 수 있다.
또한, 상기 제2 레이저 출력 소자(5760)는 제2 레이저(5761)를 출력할 수 있으며, 상기 제2 레이저(5761)는 제2 다이버전스 각도를 가질 수 있다.
이 때, 상기 제1 및 제2 다이버전스 각도는 동일할 수 있으나, 이에 한정되지 않고 상이할 수도 있다.
또한, 상기 제1 및 제2 레이저(5751,5761)는 제1 거리(5770)에서 제1 및 제2 광밀도를 가질 수 있다. 이 때, 상기 제1 거리(5770)는 Eye-safety를 위한 기준 거리일 수 있다.
또한, 상기 제1 및 제2 레이저(5751,5761)의 상기 제1 거리(5770)에서의 제1 및 제2 광밀도는 사람의 눈 건강에 영향을 미치지 않는 광밀도일 수 있다.
또한, 상기 제1 및 제2 레이저(5751,5761)는 제2 거리(5780)에서 제3 및 제4 광밀도를 가질 수 있다. 이 때, 상기 제3 및 제4 광밀도는 상기 제1 및 제2 광밀도 각각의 50%의 광밀도일 수 있으나 이에 한정되지 않는다.
또한, 상기 제1 및 제2 레이저(5751,5761)는 상기 제2 거리(5780) 이하에서는 상기 제3 및 제4 광밀도 보다 큰 광밀도를 가지며, 상기 제2 거리(5780) 이상에서는 상기 제3 및 제4 광밀도 보다 작은 광밀도를 가질 수 있다.
또한, 상기 제1 및 제2 레이저(5751,5761)는 제3 거리(5790)에서 적어도 일 부분이 오버랩 될 수 있다.
따라서, 상기 제1 거리(5770)에서의 광밀도가 사람의 눈에 영향을 주지 않는 최대 광밀도인 경우, 상기 제1 및 제2 레이저(5751,5761)가 오버랩 되는 상기 제3 거리(5790)가 도 118에 도시된 바와 다르게 상기 제2 거리(5780) 이하인 경우 상기 제1 및 제2 레이저(5751,5761)가 오버랩 되는 영역의 광밀도가 사람의 눈에 영향을 주지 않는 최대 광밀도를 초과할 수 있다.
그러나 도 118에 도시된 바와 같이 상기 제1 및 제2 레이저(5751,5761)가 오버랩 되는 상기 제3 거리(5790)가 상기 제2 거리(5780) 이상인 경우 상기 제1 및 제2 레이저(5751,5761)가 오버랩 되는 영역의 광밀도는 사람의 눈에 영향을 주지 않는 최대 광밀도 이하일 수 있다.
따라서, 상술한 바와 같이 상기 제1 및 제2 레이저(5751,5761)가 오버랩 되는 거리(5790)를 상기 제2 거리(5780)이상이 되도록 상기 제1 및 제2 레이저 출력부(5750,5760) 사이의 이격 거리 및 상기 제1 및 제2 레이저(5751,5761)의 다이버전스 각도를 설계하는 경우, Eye-safety기준을 만족하면서 오버랩되는 영역에서 측정 가능한 거리를 확장시킬 수 있다.
도 119는 일 실시예에 따른 라이다 장치의 향상된 측정 거리를 설명하기 위한 도면이다.
일 실시에에 따른 라이다 장치는 레이저 출력부를 포함할 수 있으며, 상기 레이저 출력부는 제1 레이저 출력 소자 및 제2 레이저 출력 소자를 포함할 수 있다. 또한, 상기 제1 및 제2 레이저 출력 소자는 각각 제1 및 제2 레이저를 출력할 수 있다.
이 때, 상기 제1 레이저 및 상기 제2 레이저는 거리에 따른 레이저 스팟을 형성할 수 있으며, 상기 레이저 스팟은 상기 라이다 장치의 조사 영역을 형성할 수 있다. 예를 들어, 상기 제1 레이저가 출력되는 경우 상기 라이다 장치는 상기 제1 레이저의 거리에 따른 스팟 영역에 대응되는 조사 영역을 형성할 수 있다.
또한, 상기 라이다 장치의 측정 가능 거리는 상기 레이저들의 광밀도에 비례할 수 있음은 상술한 바 이므로 상세한 설명은 생략하기로 한다.
또한, 도 119을 참조하면, 상기 제1 레이저 및 상기 제2 레이저는 각각 제1 거리에서 제1 조사영역(5752) 및 제2 조사영역(5762)을 형성할 수 있으며, 제2 거리에서 제3 조사영역(5753) 및 제4 조사영역(5763)을 형성할 수 있다. 이 때, 설명의 편의를 위해 상기 조사영역들(5752,5762)를 사각 형상으로 도시하였으나, 이에 한정되지 않고, 원형, 타원형 등 조사되는 레이저의 스팟 형상에 대응되는 형상으로 상기 조사영역들(5752,5762)이 형성될 수 있다.
또한, 상기 제1 거리는 상기 제1 및 제2 레이저가 오버랩되지 않는 거리일 수 있으며, 상기 제2 거리는 상기 제1 및 제2 레이저가 오버랩되는 거리일 수 있다. 예를 들어, 상기 제1 거리는 상기 레이저 출력부로부터 10cm가 되는 거리일 수 잇으며, 상기 제2 거리는 상기 레이저 출력부로부터 200m가 되는 거리일 수 있으나 이에 한정되지 않는다.
또한, 상기 제1 및 제2 레이저는 사람의 눈 건강에 영향을 주지 않도록 출력될 수 있다. 예를 들어, 상기 제1 거리가 Eye-safety를 판단하기 위한 기준 거리인 경우, 상기 제1 및 제2 레이저의 상기 제1 거리에서의 광밀도는 사람의 눈 건강에 영향을 주지 않는 광밀도일 수 있다.
또한, 상기 제1 및 제2 레이저는 상기 제2 거리에서 각각 제1 광밀도 및 제2 광밀도를 가질 수 있다. 이 때, 상기 제1 및 제2 광밀도는 상기 제1 및 제2 레이저의 출력 세기, 다이버전스 및 상기 제2 거리 값에 따라 변할 수 있다.
또한, 상기 제1 및 제2 레이저가 동시에 조사되는 경우 상기 제2 거리에서 상기 제1 및 제2 레이저가 오버랩되는 영역은 제3 광밀도를 가질 수 있다. 이 때, 상기 제3 광밀도는 상기 제1 및 제2 광밀도 보다 클 수 있다. 예를 들어, 상기 제1 및 제2 광밀도가 동일한 경우 상기 제3 광밀도는 상기 제1 및 제2 광밀도의 2배가 될 수 있다.
따라서, 상기 제1 및 제2 레이저가 오버랩되는 영역에서 상기 라이다 장치의 측정 거리가 향상될 수 있다. 예를 들어, 상기 제2 거리에서 상기 제1 레이저의 상기 제1 광밀도가 상기 라이다 장치에서 거리를 측정하기 위한 기준 신호를 발생시키지 못하는 광밀도인 경우 상기 라이다 장치에서 상기 제1 레이저만 조사 하였을 때 상기 제2 거리에 위치하는 대상체에 대한 거리 정보를 획득하지 못할 수 있다. 그러나, 상기 제2 거리에서 상기 제3 광밀도가 상기 라이다 장치에서 거리를 측정하기 위한 기준 신호를 발생시킬 수 있는 광밀도인 경우 상기 라이다 장치에서 상기 제1 및 제2 레이저를 동시에 조사 하였을 때 상기 라이다 장치는 상기 제1 및 제2 레이저가 오버랩되는 영역에서 상기 제2 거리에 위치하는 대상체에 대한 거리 정보를 획득할 수 있다.
또한, 상기 제2 거리에서 상기 제3 광밀도를 가지기 위해 제3 레이저 출력 소자로부터 제3 레이저를 출력하는 경우, 상기 제3 레이저의 출력 세기는 상기 제1 및 제2 레이저의 출력 세기보다 클 수 있다. 따라서, 상기 제3 레이저는 상기 제1 거리에서 사람의 눈 건강에 영향을 미치는 광밀도를 가질 수 있다.
그러나, 상술한 바와 같이 상기 제2 거리에서 상기 제3 광밀도를 가지는 오버랩 영역을 형성하기 위해 상기 제1 및 제2 레이저 출력소자로부터 상기 제1 및 제2 레이저를 동시에 출력하는 경우, 상기 제1 및 제2 레이저 각각은 상기 제1 거리에서 사람의 눈 건강에 영향을 미치지 않는 광밀도를 가지며, 상기 제2 거리에서는 오버랩 되는 영역에서 상기 제3 광밀도를 가지기 때문에 상기 제1 및 제2 레이저 출력 소자를 포함하는 상기 라이다 장치는 사람의 눈 건강에 영향을 미치지 않으면서 적어도 일부 영역에서 측정 거리를 향상시킬 수 있다.
또한, 상기 제1 및 제2 레이저가 오버랩 되는 영역은 상기 레이저 출력부로부터 거리가 멀어짐에 따라 커질 수 있다. 예를 들어, 상기 레이저의 중심 사이의 간격이 1cm 이며, 상기 제1 및 제2 레이저의 다이버전스 각도가 1.2도인 경우, 상기 제1 및 제2 레이저의 200m에서 조사 영역의 크기는 각각 4m*4m가 되며, 오버랩 되는 영역은 제1 및 제2 레이저의 전체 조사 영역의 99.5% 가 될 수 있다.
따라서, 상술한 바와 같이 오버랩 되는 영역의 비율이 증가됨에 따라 상기 제1 레이저 및 상기 제2 레이저는 하나의 레이저로 볼 수 있으며, 이에 따라 상기 라이다 장치의 측정 거리가 향상될 수 있다.
또한, 레이저의 조사 영역을 사각 형상으로 가정하는 경우, 거리에 따라 전체 조사 영역 대비 오버랩 되는 영역의 비율은 다음과 같이 나타낼 수 있다.
레이저 출력부로부터의 거리를 D, 레이저 출력 소자들 간의 거리를 d, 레이저의 다이버전스 각도를 라 하는 경우
라 하는 경우

의 식을 만족할 수 있다.
다만, 이에 한정되지 않으며, 레이저의 조사 영역은 다양한 형상을 가질 수 있으나, 레이저 출력부로부터의 거리가 멀어짐에 따라 오버랩 되는 영역의 비율이 커질 수 있음은 상술한 바이며, 이에 따라 상기 라이다 장치의 측정 거리가 향상될 수 있다.
도 120는 일 실시예에 따른 레이저 출력부를 설명하기 위한 도면이다.
도 120를 참조하면, 일 실시예에 따른 레이저 출력부(5800)는 제1 레이저 출력 소자(5810), 제2 레이저 출력 소자(5820), 제3 레이저 출력 소자(5830) 및 제4 레이저 출력 소자(5840)를 포함할 수 있으며, 상기 제1, 제2, 제3 및 제4 레이저 출력 소자(5810,5820,5830,5840)는 각각 제1, 제2, 제3 및 제4 레이저(5811,5821,5831,5841)를 출력할 수 있다. 또한, 상기 레이저 출력 소자들은 각각 콜리메이션 컴포넌트 및 스티어링 컴포넌트를 포함할 수 있다. 예를 들어, 상기 레이저 출력부는 상기 레이저 출력 소자들이 포함된 제1 레이어, 상기 콜리메이션 컴포넌트가 포함된 제2 레이어 및 상기 스티어링 컴포넌트가 포함된 제3 레이어를 포함할 수 있으나, 이에 한정되지 않는다.
또한, 상기 제1 내지 제4 레이저는 각각 제1 내지 제4 다이버전스 각도를 가질 수 있으며, 상기 제1 내지 제4 다이버전스 각도는 서로 동일할 수 있으나, 이에 한정되지 않고 서로 상이할 수도 있고, 적어도 일부의 다이버전스 각도가 서로 동일할 수도 있다.
또한, 상기 제1 내지 제4 레이저는 각각 제1 내지 제4 스티어링 각도를 가질 수 있으며, 상기 제1 내지 제4 스티어링 각도는 서로 동일할 수 있으나, 이에 한정되지 않고, 서로 상이할 수도 있고, 적어도 일부의 스티어링 각도가 서로 동일할 수 있다. 예를 들어, 도 120에 도시된 바와 같이 상기 제1 및 제2 스티어링 각도는 서로 동일하고, 상기 제3 및 제4 스티어링 각도는 서로 동일하나 상기 제1 스티어링 각도와 상기 제3 스티어링 각도는 서로 상이할 수 있다.
또한, 상기 레이저 출력부(5800)를 포함하는 라이다 장치는 복수개의 스티어링 각도를 이용하여 시야각(FOV:Field of View)를 형성할 수 있다. 예를 들어, 상기 제1 및 제3 레이저 출력 소자(5810,5830)를 포함하는 상기 레이저 출력부(5800)에서 25개의 레이저 출력 소자가 각각 서로 다른 스티어링 각도를 가지고 출력되며, 각각의 레이저들 사이의 스티어링 각도가 수직 방향으로 1.2도 차이나는 경우 상기 라이다 장치는 수직 방향으로 30도의 시야각(FOV(V))를 형성할 수 있으나, 이에 한정되지 않는다.
또한, 상기 레이저 출력부(5800)는 상기 레이저 출력부(5800)가 포함되는 라이다 장치의 측정거리를 향상시키기 위하여 상기 제1 레이저 출력 소자(5810)와 동일한 스티어링 각도를 가지는 상기 제2 레이저 출력 소자(5820) 를 포함할 수 있다. 즉, 상기 제1 스티어링 각도와 상기 제2 스티어링 각도가 동일한 경우 상기 제1 레이저(5811) 및 상기 제2 레이저(5821)는 동일한 방향으로 조사될 수 있다.
또한, 상기 제1 및 제2 레이저(5811,5821)가 동일한 방향으로 조사되는 경우, 도 110 내지 도 119을 통해 상술한 바와 같이 상기 제1 및 제2 다이버전스 각도에 따른 확산에 의해 서로 오버랩 될 수 있다.
또한, 상기 제1 및 제2 레이저 출력 소자(5810,5820)를 포함하는 상기 라이다 장치는 상기 제1 및 제2 레이저 출력 소자(5810,5820)를 동시에 동작 시킬 수 있으며, 이 경우 상기 제1 및 제2 레이저(5811,5821)가 오버랩 되는 영역에서의 측정 거리가 향상될 수 있다. 예를 들어, 상기 제1 및 제2 레이저 출력 소자(5810,5820)를 동시에 동작시키는 경우, 상기 라이다 장치는 상기 제1 및 제2 레이저(5811,5821) 각각으로부터는 측정되지 않는 거리에 위치한 대상체까지의 거리를 측정할 수 있다.
또한, 도 120에 도시된 바와 같이 상기 제1 및 제2 레이저 출력 소자(5810,5820)는 상기 레이저 출력부(5800) 내에 인접하도록 배치될 수 있다. 이 경우 상기 제1 및 제2 레이저 출력 소자(5810,5820)사이의 거리는 상기 제1 및 제2 레이저(5811,5821)가 오버랩 되는 거리가 Eye-safety를 위한 기준 거리보다 멀도록 설정될 수 있다. 예를 들어, 상기 제1 및 제2 레이저 출력 소자(5810,5820) 사이의 거리는 상기 제1 및 제2 레이저(5811,5821)가 오버랩 되는 거리에서의 오버랩 되는 영역의 광밀도가 상기 기준 거리에서의 상기 제1 및 제2 레이저의 각각의 광밀도를 초과하지 않도록 설정될 수 있으나, 이에 한정되지 않는다.
또한, 상기 레이저 출력부(5800)는 상기 레이저 출력부(5800)가 포함되는 라이다 장치의 측정거리를 향상시키기 위하여 상기 제3 레이저 출력 소자(5830)와 동일한 스티어링 각도를 가지는 상기 제4 레이저 출력 소자(5840) 를 포함할 수 있다. 즉, 상기 제3 스티어링 각도와 상기 제4 스티어링 각도가 동일한 경우 상기 제3 레이저(5831) 및 상기 제4 레이저(5841)는 동일한 방향으로 조사될 수 있다.
또한, 상기 제3 및 제4 레이저(5831,5841)가 동일한 방향으로 조사되는 경우, 도 110 내지 도 119을 통해 상술한 바와 같이 상기 제3 및 제4 다이버전스 각도에 따른 확산에 의해 서로 오버랩 될 수 있다.
또한, 상기 제3 및 제4 레이저 출력 소자(5830,5840)를 포함하는 상기 라이다 장치는 상기 제3 및 제4 레이저 출력 소자(5830,5840)를 동시에 동작 시킬 수 있으며, 이 경우 상기 제1 및 제2 레이저(5831,5841)가 오버랩 되는 영역에서의 측정 거리가 향상될 수 있다. 예를 들어, 상기 제3 및 제4 레이저 출력 소자(5830,5840)를 동시에 동작시키는 경우, 상기 라이다 장치는 상기 제3 및 제4 레이저(5831,5841) 각각으로부터는 측정되지 않는 거리에 위치한 대상체까지의 거리를 측정할 수 있다.
또한, 도 120에 도시된 바와 같이 상기 제3 및 제4 레이저 출력 소자(5830,5840)는 상기 레이저 출력부(5800) 내에 인접하도록 배치될 수 있다. 이 경우 상기 제1 및 제2 레이저 출력 소자(5830,5840)사이의 거리는 상기 제3 및 제4 레이저(5831,5841)가 오버랩 되는 거리가 Eye-safety를 위한 기준 거리보다 멀도록 설정될 수 있다. 예를 들어, 상기 제3 및 제4 레이저 출력 소자(5830,5840) 사이의 거리는 상기 제3 및 제4 레이저(5831,5841)가 오버랩 되는 거리에서의 오버랩 되는 영역의 광밀도가 상기 기준 거리에서의 상기 제3 및 제4 레이저(5831,5841)의 각각의 광밀도를 초과하지 않도록 설정될 수 있으나, 이에 한정되지 않는다.
또한, 상기 제1 및 제2 레이저 출력 소자(5810,5820)와 상기 제3 및 제4 레이저 출력 소자(5830,5840)는 동시에 레이저를 출력할 수 있으나, 서로 상이한 시간에 레이저를 출력할 수 있다. 예를 들어, 상기 제1 내지 제4 레이저 출력 소자(5810,5820,5830,5840)에서 상기 제1 내지 제4 레이저(5811,5821,5831,5841) 를 동시에 출력할 수도 있으며, 상기 제1 및 제2 레이저 출력 소자(5810,5820)에서 상기 제1 및 제2 레이저(5811,5821)를 출력한 후 상기 제3 및 제4 레이저 출력 소자(5830,5840)에서 상기 제3 및 제4 레이저(5831,5841)를 출력할 수 있으나, 이에 한정되지 않는다.
또한, 상기 제1 레이저(5811)와 상기 제3 레이저(5831)가 서로 오버랩 되도록 상기 제1 및 제3 스티어링 각도의 차이는 상기 제1 및 제3 다이버전스 각도 보다 작을 수 있다. 이 경우 상기 제1 및 제3 레이저(5811,5831)가 동시에 출력되었을 때 상기 제1 및 제3 레이저(5811,5831)가 서로 오버랩 되는 영역에서 광밀도가 증가할 수 있다.
또한, 이 경우, 상기 제1 및 제2 레이저(5811,5821)가 오버랩 되는 영역의 크기는 상기 제1 및 제3 레이저(5811,5831)가 오버랩 되는 영역의 크기보다 클 수 있다.
또한, 상기 제1 레이저(5811)와 상기 제3 레이저(5831)가 서로 오버랩 되지 않도록 상기 제1 및 제3 스티어링 각도의 차이는 상기 제1 및 제3 다이버전스 각도 보다 클 수 있다. 이 경우 상기 제1 및 제3 레이저(5811,5831)가 동시에 출력되었을 때도 상기 제1 및 제3 레이저(5811,5831)가 서로 오버랩 되는 영역이 형성되지 않을 수 있다.
또한, 도 120에 도시되지는 않았으나, 상기 제1 레이저 출력 소자(5810)와 상기 제3 레이저 출력 소자(5830)사이의 거리는 상기 제1 레이저 출력 소자(5810)와 상기 제2 레이저 출력 소자(5820)사이의 거리보다 가까울 수 있으며, 이 경우에도, 상기 제1 및 제2 레이저(5811,5821)가 오버랩 되는 영역은 상기 제1 및 제3 레이저(5811,5831)가 오버랩 되는 영역보다 클 수 있다.
도 121은 일 실시예에 따른 레이저 출력부를 설명하기 위한 도면이다.
도 121을 참조하면, 일 실시예에 따른 레이저 출력부(5850)는 제1 레이저 출력 소자(5860), 제2 레이저 출력 소자(5870), 제3 레이저 출력 소자(5880) 및 제4 레이저 출력 소자(5890)를 포함할 수 있으며, 상기 제1, 제2, 제3 및 제4 레이저 출력 소자(5860,5870,5880,5890)는 각각 제1, 제2, 제3 및 제4 레이저(5861,5827,5881,5891)를 출력할 수 있다. 또한, 상기 레이저 출력 소자들은 각각 콜리메이션 컴포넌트 및 스티어링 컴포넌트를 포함할 수 있다. 예를 들어, 상기 레이저 출력부는 상기 레이저 출력 소자들이 포함된 제1 레이어, 상기 콜리메이션 컴포넌트가 포함된 제2 레이어 및 상기 스티어링 컴포넌트가 포함된 제3 레이어를 포함할 수 있으나, 이에 한정되지 않는다.
또한, 상기 제1 내지 제4 레이저 출력 소자(5860,5870,5880,5890) 들에 대하여는 앞서 서술한 내용이 적용될 수 있으므로 이에 대한 상세한 내용은 생략하기로 한다.
도 121에 도시된 바와 같이 상기 제1 및 제2 레이저 출력 소자(5860,5870)는 상기 레이저 출력부(5850) 내에 인접하지 않도록 배치될 수 있다. 이 경우 상기 제1 및 제2 레이저 출력 소자(5860,5870)사이의 거리는 상기 제1 및 제2 레이저(5861,5871)가 오버랩 되는 거리가 Eye-safety를 위한 기준 거리보다 멀도록 설정될 수 있다. 예를 들어, 상기 제1 및 제2 레이저 출력 소자(5860,5870) 사이의 거리는 상기 제1 및 제2 레이저(5861,5871)가 오버랩 되는 거리에서의 오버랩 되는 영역의 광밀도가 상기 기준 거리에서의 상기 제1 및 제2 레이저의 각각의 광밀도를 초과하지 않도록 설정될 수 있으나, 이에 한정되지 않는다.
또한, 도 120에 도시된 바와 같이 상기 제3 및 제4 레이저 출력 소자(5880,5890)는 상기 레이저 출력부(5850) 내에 인접하지 않도록 배치될 수 있다. 이 경우 상기 제1 및 제2 레이저 출력 소자(5880,5890)사이의 거리는 상기 제3 및 제4 레이저(5881,5891)가 오버랩 되는 거리가 Eye-safety를 위한 기준 거리보다 멀도록 설정될 수 있다. 예를 들어, 상기 제3 및 제4 레이저 출력 소자(5880,5890) 사이의 거리는 상기 제3 및 제4 레이저(5881,5891)가 오버랩 되는 거리에서의 오버랩 되는 영역의 광밀도가 상기 기준 거리에서의 상기 제3 및 제4 레이저(5881,5891)의 각각의 광밀도를 초과하지 않도록 설정될 수 있으나, 이에 한정되지 않는다.
또한, 도 120에 도시된 바와 같이 상기 제1 및 제2 레이저 출력 소자(5860,5870) 사이의 거리는 상기 제3 및 제4 레이저 출력 소자(5880,5890) 사이의 거리와 상이할 수 있다. 예를 들어, 상기 제1 및 제2 레이저 출력 소자(5860,5870) 사이의 거리는 상기 제3 및 제4 레이저 출력 소자(5880,5890) 사이의 거리보다 작을 수 있으나, 이에 한정되지 않는다.
또한, 상기 제1 및 제2 레이저 출력 소자(5860,5870) 사이의 거리와 상기 제3 및 제4 레이저 출력 소자(5880,5890) 사이의 거리가 상이함에 따라, 상기 제1 및 제2 레이저(5861,5871)가 오버랩 되는 거리는 상기 제3 및 제4 레이저(5881,5891)가 오버랩 되는 거리와 상이할 수 있다. 예를 들어, 상기 제1 및 제2 레이저 출력 소자(5860,5870) 사이의 거리가 상기 제3 및 제4 레이저 출력 소자(5880,5890)사이의 거리 보다 작은 경우, 상기 제1 및 제2 레이저(5861,5871)가 오버랩 되는 거리는 상기 제3 및 제4 레이저(5881,5891)가 오버랩 되는 거리 보다 작을 수 있다.
또한, 상기 제1 및 제2 레이저 출력 소자(5860,5870) 사이의 거리와 상기 제3 및 제4 레이저 출력 소자(5880,5890) 사이의 거리가 상이함에 따라, 동일한 거리에서 상기 제1 및 제2 레이저(5861,5871)가 오버랩 되는 영역은 상기 제3 및 제4 레이저(5881,5891)가 오버랩 되는 영역과 상이할 수 있다. 예를 들어, 상기 제1 및 제2 레이저 출력 소자(5860,5870) 사이의 거리가 상기 제3 및 제4 레이저 출력 소자(5880,5890)사이의 거리 보다 작은 경우, 동일한 거리에서 상기 제1 및 제2 레이저(5861,5871)가 오버랩 되는 영역은 상기 제3 및 제4 레이저(5881,5891)가 오버랩 되는 영역 보다 클 수 있다.
또한, 상기 제1 및 제2 레이저 출력 소자(5860,5870)와 상기 제3 및 제4 레이저 출력 소자(5880,5890)는 동시에 레이저를 출력할 수 있으나, 서로 상이한 시간에 레이저를 출력할 수 있다. 예를 들어, 상기 제1 내지 제4 레이저 출력 소자(5860,5870,5880,5890)에서 상기 제1 내지 제4 레이저(5861,5871,5881,5891) 를 동시에 출력할 수도 있으며, 상기 제1 및 제2 레이저 출력 소자(5860,5870)에서 상기 제1 및 제2 레이저(5861,5871)를 출력한 후 상기 제3 및 제4 레이저 출력 소자(5880,5890)에서 상기 제3 및 제4 레이저(5881,5891)를 출력할 수 있으나, 이에 한정되지 않는다.
또한, 상기 제1 레이저(5861)와 상기 제3 레이저(5881)가 서로 오버랩 되도록 제1 및 제3 스티어링 각도의 차이는 제1 및 제3 다이버전스 각도 보다 작을 수 있다. 이 경우 상기 제1 및 제3 레이저(5861,5881)가 동시에 출력되었을 때 상기 제1 및 제3 레이저(5861,5881)가 서로 오버랩 되는 영역에서 광밀도가 증가할 수 있다.
또한, 이 경우, 상기 제1 및 제2 레이저(5861,5871)가 오버랩 되는 영역의 크기는 상기 제1 및 제3 레이저(5861,5881)가 오버랩 되는 영역의 크기보다 클 수 있다.
또한, 상기 제1 레이저(5861)와 상기 제3 레이저(5881)가 서로 오버랩 되지 않도록 상기 제1 및 제3 스티어링 각도의 차이는 상기 제1 및 제3 다이버전스 각도 보다 클 수 있다. 이 경우 상기 제1 및 제3 레이저(5861,5881)가 동시에 출력되었을 때도 상기 제1 및 제3 레이저(5861,5881)가 서로 오버랩 되는 영역이 형성되지 않을 수 있다.
또한, 도 121에 도시되지는 않았으나, 상기 제1 레이저 출력 소자(5860)와 상기 제3 레이저 출력 소자(5880)사이의 거리는 상기 제1 레이저 출력 소자(5860)와 상기 제2 레이저 출력 소자(58670)사이의 거리보다 가까울 수 있으며, 이 경우에도, 상기 제1 및 제2 레이저(5861,5871)가 오버랩 되는 영역은 상기 제1 및 제3 레이저(5861,5881)가 오버랩 되는 영역보다 클 수 있다.
도 122는 일 실시예에 따른 레이저 출력부를 설명하기 위한 도면이다.
도 122를 참조하면, 일 실시예에 따른 레이저 출력부(5900)는 제1 레이저 출력 소자(5901), 제2 레이저 출력 소자(5902), 제3 레이저 출력 소자(5903) 및 제4 레이저 출력 소자(5904)를 포함할 수 있으며, 상기 제1, 제2, 제3 및 제4 레이저 출력 소자(5901,5902,5903,5904)는 각각 제1, 제2, 제3 및 제4 레이저(5911,5912,5913,5914)를 출력할 수 있다. 또한, 상기 레이저 출력 소자들은 각각 콜리메이션 컴포넌트 및 스티어링 컴포넌트를 포함할 수 있다. 예를 들어, 상기 레이저 출력부는 상기 레이저 출력 소자들이 포함된 제1 레이어, 상기 콜리메이션 컴포넌트가 포함된 제2 레이어 및 상기 스티어링 컴포넌트가 포함된 제3 레이어를 포함할 수 있으나, 이에 한정되지 않는다.
또한, 상기 제1 내지 제4 레이저는 각각 제1 내지 제4 다이버전스 각도를 가질 수 있으며, 상기 제1 내지 제4 다이버전스 각도는 서로 동일할 수 있으나, 이에 한정되지 않고 서로 상이할 수도 있고, 적어도 일부의 다이버전스 각도가 서로 동일할 수도 있다.
또한, 상기 제1 내지 제4 레이저는 각각 제1 내지 제4 스티어링 각도를 가질 수 있으며, 상기 제1 내지 제4 스티어링 각도는 서로 동일할 수 있으나, 이에 한정되지 않고, 서로 상이할 수도 있고, 적어도 일부의 스티어링 각도가 서로 동일할 수 있다. 예를 들어, 도 122에 도시된 바와 같이 상기 제1, 제2, 제3 및 제4 스티어링 각도가 서로 동일할 수 있다.
또한, 상기 레이저 출력부(5900)는 상기 레이저 출력부(5900)가 포함되는 라이다 장치의 측정 거리를 향상시키기 위하여 상기 제1 레이저 출력 소자(5901)와 동일한 스티어링 각도를 가지는 상기 제2, 제3 및 제4 레이저 출력 소자(5902,5903,5904)를 포함할 수 있다. 즉 상기 제1 스티어링 각도와 동일한 제2, 제3 및 제4 스티어링 각도를 가지는 상기 제2, 제3 및 제4 레이저 출력 소자(5902,5903,5904)를 이용하여 상기 제1 레이저(5911)와 상기 제2, 제3 및 제4 레이저(5912,5913,5914)를 오버랩되게 할 수 있으며, 오버랩 되는 영역을 이용하여 상기 라이다 장치의 측정 거리를 향상시킬 수 있다.
또한, 상기 제1 내지 제4 레이저 출력 소자(5901,5902,5903,5904)는 동시에 레이저를 출력할 수도 있으며, 서로 상이한 시간에 레이저를 출력할 수도 있고, 적어도 둘 이상의 레이저 출력 소자가 동시에 레이저를 출력할 수도 있다.
또한, 상기 제1 내지 제4 레이저 출력 소자(5901,5902,5903.5904) 중 두개의 레이저 출력 소자에서 동시에 레이저를 출력하도록 동작시키는 경우에 동시에 동작하는 두개의 레이저 출력 소자에서 출력된 레이저가 사람의 눈 건강에 영향을 미치지 않으면서 라이다 장치의 측정거리를 향상시키기 위한 두 개의 레이저 출력 소자 간의 관계에 대하여는 상술한 바 상세한 설명은 생략하기로 한다.
또한, 상기 제1 내지 제4 레이저 출력 소자(5901,5902,5903,5904) 중 세 개의 레이저 출력 소자에서 동시에 레이저를 출력하도록 동작시키는 경우를 서술하기 위해 편의상 제1, 제2 및 제3 레이저 출력 소자(5901,5902,5903)를 이용하여 서술하기로 하나, 이에 한정되지 않으며, 다른 레이저 출력 소자들 간에도 적용될 수 있음은 충분히 이해될 수 있다.
상기 제1, 제2 및 제3 레이저 출력 소자(5901,5902,5903)로부터 출력되는 상기 제1, 제2 및 제3 레이저(5911,5912,5913)는 제1 거리(5920)에서 제1, 제2 및 제3 광밀도를 가질 수 있다. 이 때, 상기 제1 거리(5920)는 Eye-safety를 위한 기준거리일 수 있으며, 상기 제1, 제2 및 제3 광밀도는 사람의 눈 건강에 영향을 미치지 않는 광밀도 일 수 있다.
따라서, 상기 제1, 제2 및 제3 레이저(5911,5912,5913)는 각각 사람의 눈 건강에 영향을 미치지 않을 수 있다.
또한, 상기 제1, 제2 및 제3 레이저 출력 소자(5901,5902,5903)로부터 출력되는 상기 제1, 제2 및 제3 레이저(5911,5912,5913)는 제2 거리(5930)에서 제5, 제6 및 제7 광밀도를 가질 수 있다. 이 때, 상기 제2 거리(5930)는 상기 제1 및 제2 레이저(5911,5912)가 서로 오버랩 되며, 상기 제2 및 제3 레이저(5912,5913)가 서로 오버랩 되는 거리일 수 있다. 다만, 상기 제2 거리는 상기 제1 및 제2 레이저(5911,5912)가 서로 오버랩 되는 제2-1거리 및 상기 제2 및 제3 레이저(5912,5913)가 서로 오버랩 되는 제2-2거리를 포함할 수 있으나, 설명의 편의를 위해서 제2 거리(5930)로 서술할 수 있다.
따라서, 사람의 눈 건강에 영향을 미치지 않기 위해 상기 제5 및 제6 광밀도의 합은 상기 제1 또는 제2 광밀도 이하일 수 있으며, 상기 제6 및 제7 광밀도의 합은 상기 제2 또는 제3 광밀도 이하일 수 있다. 이 때, 광밀도의 합은 선형적인 합 연산일 수 있으나, 이에 한정되지 않고, 오버랩 되는 영역의 광밀도를 의미할 수 있다.
예를 들어, 상기 제1, 제2 및 제3 광밀도가 서로 동일하며, 사람의 눈에 영향을 미치지 않는 최대 광밀도인 경우, 상기 제5, 제6, 제7 광밀도는 상기 제1 광밀도의 50%이하가 될 수 있으며, 이 경우 상기 제5 및 제6 광밀도의 합은 상기 제1 광밀도 이하일 수 있고, 상기 제6 및 제7 광밀도의 합은 상기 제1 광밀도와 이하일 수 있으나, 이에 한정되지 않는다.
또한, 상기 제1, 제2 및 제3 레이저 출력 소자(5901,5902,5903)로부터 출력되는 상기 제1, 제2 및 제3 레이저(5911,5912,5913)는 제3 거리(미도시)에서 제9, 제10 및 제11 광밀도를 가질 수 있다. 이 때, 상기 제3 거리(미도시)는 상기 제1 및 제3 레이저(5911,5913)가 서로 오버랩 되는 거리일 수 있다. 즉, 상기 제3 거리(미도시)는 상기 제1, 제2 및 제3 레이저(5911,5912,5913)가 모두 오버랩 되는 거리를 의미할 수 있다.
따라서, 사람의 눈 건강에 영향을 미치지 않기 위해 상기 제9, 제10 및 제11 광밀도의 합은 상기 제1, 제2 또는 제3 광밀도 이하일 수 있다. 이 때, 광밀도의 합은 선형적인 합 연산일 수 있으나, 이에 한정되지 않고, 오버랩 되는 영역의 광밀도를 의미할 수 있다.
예를 들어, 상기 제1, 제2 및 제3 광밀도가 서로 동일하며, 사람의 눈에 영향을 미치지 않는 최대 광밀도인 경우, 상기 제9, 제10 및 제11 광밀도는 상기 제1 광밀도의 1/3 이하가 될 수 있으며, 이 경우 상기 제9, 제10 및 제11 광밀도의 합은 상기 제1 광밀도 이하일 수 있으나, 이에 한정되지 않는다.
또한, 상술한 광밀도 조건을 만족하는 레이저를 출력하기 위해, 레이저의 다이버전스 각도, 레이저 출력 소자들 간의 간격이 조절될 수 있음은 상술한 내용들에 의해 충분히 이해될 수 있다.
또한, 상기 제1 내지 제4 레이저 출력 소자(5901,5902,5903,5904) 모두를 동작시키되 동시에 동작하는 복수개의 레이저 출력소자에서 출력된 레이저가 사람의 눈 건강에 영향을 미치지 않으면서 라이다 장치의 측정거리를 향상시키기 위한 상기 제1 내지 제4 레이저 출력 소자(5901,5902,5903,5904)들 간의 관계를 서술하기로 한다.
상기 제1, 제2, 제3 및 제4 레이저 출력 소자(5901,5902,5903,5904) 로부터 출력되는 상기 제1, 제2, 제3 및 제4 레이저(5911,5912,5913,5914)는 제1 거리(5920)에서 제1, 제2, 제3 및 제4 광밀도를 가질 수 있다. 이 때, 상기 제1 거리(5920)는 Eye-safety를 위한 기준거리일 수 있으며, 상기 제1, 제2, 제3 및 제4 광밀도는 사람의 눈 건강에 영향을 미치지 않는 광밀도 일 수 있다.
또한, 상기 제2 거리(5930)및 제3 거리(미도시) 까지의 관계는 상술한 바 상세한 설명은 생략하기로 한다. 다만, 상기 제3 거리는 상기 제1 및 제3 레이저(5911,5913)가 오버랩 되는 거리로서 상기 제1, 제2 및 제3 레이저(5911,5912,5913)가 모두 오버랩 되는 제3-1 거리 및 상기 제2 및 제4 레이저(5912,5914)가 오버랩 되는 거리로서 상기 제2, 제3 및 제4 레이저(5912,5913,5914)가 모두 오버랩 되는 제3-2 거리를 포함할 수 있으며, 상기 제3-1거리 및 제3-2거리는 서로 상이할 수 있다. 또한, 상기 제2 거리는 상기 제1 및 제2 레이저(5911,5912)가 서로 오버랩 되는 제2-1거리, 상기 제2 및 제3 레이저(5912,5913)가 서로 오버랩 되는 제2-2거리 및 상기 제3 및 제4 레이저(5913,5914)가 서로 오버랩 되는 제2-3거리를 포함할 수 있으며, 상기 제2-1거리, 제2-2거리 및 제2-3거리는 서로 상이할 수 있다.
상기 제1, 제2, 제3 및 제4 레이저 출력 소자(5901,5902,5903,5904) 로부터 출력되는 상기 제1, 제2, 제3 및 제4 레이저(5911,5912,5913,5914)는 제4 거리(미도시)에서 제13, 제14, 제15 및 제16 광밀도를 가질 수 있다. 이 때, 상기 제4 거리(미도시)는 상기 제1 및 제4 레이저(55911,5914)가 서로 오버랩 되는 거리로서, 상기 제1 내지 제4 레이저(5911,5912,5913,5914)가 모두 오버랩 되는 거리를 의미할 수 있다.
따라서, 사람의 눈 건강에 영향을 미치지 않기 위해 상기 제13, 제14, 제15 및 제16 광밀도의 합은 상기 제1, 제2, 제3 또는 제4 광밀도 이하일 수 있다. 이 때, 광밀도의 합은 선형적인 합 연산일 수 있으나, 이에 한정되지 않고, 오버랩 되는 영역의 광밀도를 의미할 수 있다.
예를 들어, 상기 제1, 제2, 제3 및 제4 광밀도가 서로 동일하며, 사람의 눈에 영향을 미치지 않는 최대 광밀도인 경우, 상기 제13, 제14, 제15 및 제16 광밀도는 상기 제1 광밀도의 1/4 이하가 될 수 있으며, 이 경우 상기 제13, 제14, 제15 및 제16 광밀도의 합은 상기 제1 광밀도 이하일 수 있으나, 이에 한정되지 않는다.
또한, 상술한 광밀도 조건을 만족하는 레이저를 출력하기 위해, 레이저의 다이버전스 각도, 레이저 출력 소자들 간의 간격이 조절될 수 있음은 상술한 내용들에 의해 충분히 이해될 수 있다.
또한, 상기 제1 내지 제4 레이저 출력 소자(5901,5902,5903,5904)가 동시에 레이저를 출력할 수 있도록 설계한 경우 상기 제1 내지 제4 레이저 출력 소자(5901,5902,5903,5904)가 동시에 레이저를 출력 하도록 동작시킬 수 있으나, 적어도 하나의 레이저 출력 소자가 레이저를 출력하도록 동작시킬 수 있다.
예를 들어, 상기 제1 내지 제4 레이저 출력 소자(5901,5902,5903,5904) 중 하나의 레이저 출력 소자가 레이저를 출력하는 것 보다 두 개의 레이저 출력 소자가 레이저를 출력하는 것이 라이다 장치의 측정거리를 향상시킬 수 있으며, 두 개의 레이저 출력 소자가 레이저를 출력하는 것 보다 세 개의 레이저 출력 소자가 레이저를 출력하는 것이 라이다 장치의 측정 거리를 향상시킬 수 있고, 세 개의 레이저 출력 소자가 레이저를 출력하는 것 보다 네 개의 레이저 출력 소자가 레이저를 출력하는 것이 라이다 장치의 측정 거리를 향상시킬 수 있다.
따라서, 상기 라이다 장치에서 측정되는 지점에 대한 거리에 따라 상기 복수개의 레이저 출력 소자 중 적어도 일부를 동작시킬 수 있다.
예를 들어, 라이다 장치는 상기 제1 레이저 출력 소자(5901)가 제1 레이저를 출력한 후에 상기 제1 레이저를 이용하여 대상체와의 거리를 획득하지 못한 경우 동일한 지역에 대해 상기 제1 및 제2 레이저 출력 소자(5901,5902)가 제1 및 제2 레이저(5911,5912)를 출력하도록 레이저 출력 소자들을 동작시킬 수 있으며, 상기 제1 및 제2 레이저(5911,5912)를 이용하여 대상체와의 거리를 획득하지 못한 경우 동일한 지역에 대해 상기 제1, 제2 및 제3 레이저 출력 소자 (5901,5902,5903)가 동시에 상기 제1, 제2 및 제3 레이저(5911,5912,5913)를 출력하도록 레이저 출력 소자들을 동작시킬 수 있고, 상기 제1, 제2 및 제3 레이저(5911,5912,5913)를 이용하여 대상체와의 거리를 획득하지 못한 경우 동일한 지역에 대해 상기 제1, 제2, 제3 및 제4 레이저 출력 소자(5901,5902,5903,5904)가 동시에 상기 제1, 제2, 제3 및 제4 레이저 (5911,5912,5913,5914)를 출력하도록 레이저 출력 소자들을 동작시킬 수 있다.
또한, 상기 제1, 제2, 제3 및 제4 레이저 출력 소자 (5901,5902,5903,5904)는 각각 서로 동일한 이격거리를 가지도록 배치될 수 있다. 예를 들어, 도 123은 일 실시예에 따른 레이저 출력부의 배치 관계를 설명하기 위한 도면이며, 도 123에 도시된 바와 같이 상기 제1 및 제2 레이저 출력 소자(5901,5902) 사이의 거리와 상기 제2 및 제3 레이저 출력 소자(5902,5903) 사이의 거리 및 상기 제3 및 제4 레이저 출력 소자(5903,5904) 사이의 거리가 서로 동일 할 수 있다.
또한, 상기 제1, 제2, 제3 및 제4 레이저 출력 소자 (5901,5902,5903,5904)는 각각 서로 상이한 이격거리를 가지도록 배치될 수 있다. 예를 들어, 도 124은 다른 일 실시예에 따른 레이저 출력부의 배치 관계를 설명하기 위한 도면이며, 도 124에 도시된 바와 같이 상기 제1 및 제2 레이저 출력 소자(5901,5902) 사이의 거리와 상기 제2 및 제3 레이저 출력 소자(5902,5903) 사이의 거리 및 상기 제3 및 제4 레이저 출력 소자(5903,5904) 사이의 거리가 서로 상이할 수 있다. 보다 구체적으로 상기 제3 및 제4 레이저 출력 소자(5903,5904) 사이의 거리는 상기 제2 및 제3 레이저 출력 소자(5902,5903) 사이의 거리 보다 작으며, 상기 제1 및 제2 레이저 출력 소자(5901,5902) 사이의 거리 보다 클 수 있으나, 이에 한정되지 않는다.
도 125는 일 실시예에 따른 일정 이하의 다이버전스 각도를 가지는 레이저 및 이를 출력하는 레이저 출력부에 관한 도면이며, 도 126은 도 125에 따른 레이저 사이의 거리를 설명하기 위한 도면이다.
도 125 및 도 126을 참조하면, 일 실시예에 따른 레이저 출력부는 제1 레이저 출력 소자(5950) 및 제2 레이저 출력 소자(5955)를 포함할 수 있으며, 상기 제1 및 제2 레이저 출력 소자(5950,5955)는 각각 제1 및 제2 레이저(5951,5956)를 출력할 수 있다. 또한, 상기 레이저 출력 소자들은 각각 콜리메이션 컴포넌트 및 스티어링 컴포넌트를 포함할 수 있다. 예를 들어, 상기 레이저 출력부는 상기 레이저 출력 소자들이 포함된 제1 레이어, 상기 콜리메이션 컴포넌트가 포함된 제2 레이어 및 상기 스티어링 컴포넌트가 포함된 제3 레이어를 포함할 수 있으나, 이에 한정되지 않는다.
또한, 상기 제1 및 제2 레이저(5951,5956)는 각각 제1 및 제2 다이버전스 각도를 가질 수 있으며, 상기 제1 및 제2 다이버전스 각도는 서로 동일할 수 있으나, 이에 한정되지 않고 서로 상이할 수도 있다.
또한, 상기 제1 및 제2 레이저(5951,5956)는 각각 제1 및 제2 스티어링 각도를 가질 수 있으며, 상기 제1 및 제2 스티어링 각도는 서로 상이할 수 있다.
이 때, 도 125에 도시된 바와 같이, 상기 제1 및 제2 다이버전스 각도는 상기 제1 및 제2 스티어링 각도의 차이보다 작을 수 있다.
따라서, 상기 제1 및 제2 다이버전스 각도가 상기 제1 및 제2 스티어링 각도의 차이보다 작은 경우 상기 제1 레이저(5951)와 상기 제2 레이저(5956) 사이의 거리(5960)는 상기 레이저 출력부로부터 거리가 멀어짐에 따라 커질 수 있다.
보다 구체적으로, 도 126을 참조하면, 상기 레이저 출력부로부터 제1 거리에서 상기 제1 및 제2 레이저(5951,5956) 사이의 거리(5961)는 상기 제1 거리보다 먼 제2 거리에서 상기 제1 및 제2 레이저(5951,5956) 사이의 거리(5962)보다 가까울 수 있다. 예를 들어, 상기 제1 및 제2 다이버전스 각도가 0도이며, 상기 제1 및 제2 스티어링 각도의 차이가 1.2도 인 경우 상기 레이저 출력부로부터 약 10m 거리에서 상기 제1 및 제2 레이저(5951,5956) 사이의 거리는 약 21cm 정도가 될 수 있으며, 상기 레이저 출력부로부터 약 100m 거리에서 상기 제1 및 제2 레이저(5951,5956)사이의 거리는 약 2.1m 정도가 될 수 있으나, 이에 한정되지 않는다.
또한, 상술한 바와 같이 상기 제1 및 제2 레이저(5951,5956) 사이의 거리(5960)가 상기 레이저 출력부로부터의 거리가 멀어짐에 따라 커지는 경우 거리에 따라 레이저가 조사되지 않는 영역이 증가할 수 있으며, 이에 따라 상기 레이저 출력부를 포함하는 라이다 장치에서 대상체를 감지하지 못하는 영역이 증가할 수 있다.
따라서, 라이다 장치에 포함되는 레이저 출력부로부터 출력되는 레이저는 일정 이상의 다이버전스 각도를 가지도록 설게되는 것이 필요할 수 있다.
도 127은 일 실시예에 따른 일정 이상의 다이버전스 각도를 가지는 레이저 및 이를 출력하는 레이저 출력부에 관한 도면이며, 도 128은 도 127에 따른 레이저 사이의 거리를 설명하기 위한 도면이다.
도 127 및 도 128을 참조하면, 일 실시예에 따른 레이저 출력부는 제1 레이저 출력 소자(5970) 및 제2 레이저 출력 소자(5975)를 포함할 수 있으며, 상기 제1 및 제2 레이저 출력 소자(5970,5975)는 각각 제1 및 제2 레이저(5971,5976)를 출력할 수 있다. 또한, 상기 레이저 출력 소자들은 각각 콜리메이션 컴포넌트 및 스티어링 컴포넌트를 포함할 수 있다. 예를 들어, 상기 레이저 출력부는 상기 레이저 출력 소자들이 포함된 제1 레이어, 상기 콜리메이션 컴포넌트가 포함된 제2 레이어 및 상기 스티어링 컴포넌트가 포함된 제3 레이어를 포함할 수 있으나, 이에 한정되지 않는다.
또한, 상기 제1 및 제2 레이저(5971,5976)는 각각 제1 및 제2 다이버전스 각도를 가질 수 있으며, 상기 제1 및 제2 다이버전스 각도는 서로 동일할 수 있으나, 이에 한정되지 않고 서로 상이할 수도 있다.
또한, 상기 제1 및 제2 레이저(5971,5976)는 각각 제1 및 제2 스티어링 각도를 가질 수 있으며, 상기 제1 및 제2 스티어링 각도는 서로 상이할 수 있다.
이 때, 도 127에 도시된 바와 같이, 상기 제1 및 제2 다이버전스 각도는 상기 제1 및 제2 스티어링 각도의 차이와 같거나 상기 제1 및 제2 스티어링 각도의 차이보다 클 수 있다.
따라서, 상기 제1 및 제2 다이버전스 각도가 상기 제1 및 제2 스티어링 각도의 차이와 같은 경우 상기 제1 레이저(5971)와 상기 제2 레이저(5976) 사이의 거리(5980)는 상기 레이저 출력부로부터 거리가 멀어짐에 따라 일정할 수 있다.
보다 구체적으로, 도시 되지는 않았으나, 상기 레이저 출력부로부터 제1 거리에서 상기 제1 및 제2 레이저(5971,5976) 사이의 거리(5981)는 상기 제1 거리보다 먼 제2 거리에서 상기 제1 및 제2 레이저(5971,5976) 사이의 거리(5972)와 동일할 수 있다. 예를 들어, 상기 제1 및 제2 다이버전스 각도가 1.2도이며, 상기 제1 및 제2 스티어링 각도의 차이가 1.2도 이며, 상기 제1 및 제2 레이저 출력 소자(5970,5975)사이의 거리가 1mm인 경우, 상기 레이저 출력부로부터 약 10m 거리에서 상기 제1 및 제2 레이저(5951,5956) 사이의 거리는 약 1mm 정도가 될 수 있으며, 상기 레이저 출력부로부터 약 100m 거리에서 상기 제1 및 제2 레이저(5951,5956)사이의 거리도 약 1mm 정도가 될 수 있으나, 이에 한정되지 않는다.
또한, 상기 제1 및 제2 다이버전스 각도가 상기 제1 및 제2 스티어링 각도의 차이 보다 큰 경우 상기 제1 레이저(5971)와 상기 제2 레이저(5976) 사이의 거리(5980)는 상기 레이저 출력부로부터 거리가 멀어짐에 따라 감소할 수 있다.
보다 구체적으로, 도 128을 참조하면, 상기 레이저 출력부로부터 제1 거리에서 상기 제1 및 제2 레이저(5971,5976) 사이의 거리(5981)는 상기 제1 거리보다 먼 제2 거리에서 상기 제1 및 제2 레이저(5971,5976) 사이의 거리(5972)보다 멀 수 있다. 예를 들어, 상기 제1 및 제2 다이버전스 각도가 1.3도이며, 상기 제1 및 제2 스티어링 각도의 차이가 1.2도 이며, 상기 제1 및 제2 레이저 출력 소자(5970,5975)사이의 거리가 1cm인 경우, 상기 레이저 출력부로부터 약 10m 거리에서 상기 제1 및 제2 레이저(5951,5956) 사이의 거리는 약 0.2cm 정도가 될 수 있으며, 상기 레이저 출력부로부터 약 100m 거리에서 상기 제1 및 제2 레이저(5951,5956)는 오버랩 될 수 있다.
또한, 상술한 바와 같이 상기 제1 및 제2 레이저(5971,5976) 사이의 거리(5980)가 상기 레이저 출력부로부터의 거리가 멀어짐에 따라 같거나 감소하는 경우 거리에 따라 레이저가 조사되지 않는 영역이 감소할 수 있으며, 이에 따라 상기 레이저 출력부를 포함하는 라이다 장치에서 대상체를 감지하지 못하는 영역이 감소할 수 있다.
따라서, 상기 레이저 출력부를 포함하는 라이다 장치에서 감지되지 않는 대상체를 감소시키기 위하여 상기 레이저 출력부로부터 출력되는 레이저는 일정 이상의 다이버전스 각도를 가지도록 설계될 수 있으며, 보다 구체적으로 제1 및 제2 다이버전스 각도는 상기 제1 및 제2 스티어링 각도의 차이와 같거나 크도록 설계 될 수 있으며, 또는 상기 제1 다이버전스 각도의 1/2과 상기 제2 다이버전스 각도의 1/2의 합이 상기 제1 및 제2 스티어링 각도의 차이와 같거나 크도록 설계될 수 있으나, 이에 한정되지 않는다.
이하에서는 본 출원의 일 실시예에 따른 레이저 출력부에 대해 설명한다.
다만, 설명의 편의를 위해서, VCSEL을 이용해서 기술하기로 하나, VCSEL 외에 다른 레이저 출력 소자가 이용될 수 있음은 자명하다.
도 129는 일 실시예에 따른 레이저 출력부에 대해 설명하기 위한 도면이다.
도 129를 참조하면, 일 실시예에 따른 레이저 출력부(6000)는 VCSEL array(6010), 콜리메이션 컴포넌트(6020) 및 스티어링 컴포넌트(6030) 중 적어도 일부를 포함할 수 있으나, 이에 한정되지 않는다.
이 때, 상기 VCSEL array(6010)는 적어도 하나 이상의 VCSEL emitter를 포함할 수 있으며, 적어도 하나 이상의 상기 VCSEL emitter로 구성된 VCSEL unit을 적어도 하나 이상 포함할 수 있다.
또한, 상기 VCSEL array(6010)는 레이저를 출력할 수 있다. 예를 들어, 상기 VCSEL array(6010)에 포함되는 VCSEL emitter로부터 레이저가 출력될 수 있으며, 적어도 하나 이상의 VCSEL emitter를 포함하는 VCSEL unit으로부터 레이저 출력될 수도 있으나, 이에 한정되지 않는다.
또한, 상기 콜리메이션 컴포넌트(6020)는 상기 VCSEL array(6010)로부터 출력된 레이저를 콜리메이션 할 수 있다.
보다 구체적으로, 상기 콜리메이션 컴포넌트(6020)는 상기 VCSEL array(6010)에 포함되는 VCSEL emitter로부터 출력되는 레이저를 콜리메이션 할 수 있으나, 이에 한정되지 않고, 상기 VCSEL array(6010)에 포함되는 VCSEL unit으로부터 출력되는 레이저를 콜리메이션 할 수도 있다.
이 때, 상기 VCSEL array(6010)로부터 출력된 레이저의 다이버전스 각도가 감소될 수 있다.
예를 들어, 상기 VCSEL array(6010)에 포함되는 VCSEL emitter로부터 출력된 레이저가 상기 콜리메이션 컴포넌트(6020)로부터 콜리메이션되며, 이에 따라 상기 VCSEL array(6010)에 포함되는 VCSEL emitter로부터 출력된 레이저의 다이버전스 각도는 1.2도 이하로 감소될 수 있으나, 이에 한정되지 않는다.
또한, 예를 들어, 상기 VCSEL array(6010)에 포함되는 VCSEL unit으로부터 출력된 레이저가 상기 콜리메이션 컴포넌트(6020)로부터 콜리메이션되며, 이에 따라 상기 VCSEL array(6010)에 포함되는 VCSEL unit으로부터 출력된 레이저의 다이버전스 각도는 1.2도 이하로 감소될 수 있으나, 이에 한정되지 않는다.
또한, 감소된 다이버전스 각도는 0도, 0.1도, 0.2도, 0.3도, 0.4도, 0.5도, 0.6도, 0.7도, 0.8도, 0.9도, 1.0도, 1.2도, 1.3도, 1.4도, 1.5도, 1.6도, 1.7도, 1.8도, 1.9도, 2.0도 등 다양한 각도가 될 수 있으나, 이에 한정되지 않는다.
또한, 상기 콜리메이션 컴포넌트(6020)는 어레이로 구현될 수 있다.
예를 들어, 상기 콜리메이션 컴포넌트(6020)는 적어도 하나 이상의 콜리메이션 엘리먼트를 포함할 수 있으며, 상기 적어도 하나 이상의 콜리메이션 엘리먼트가 어레이로 배열된 형태로 구현될 수 있으나, 이에 한정되지 않는다.
또한, 예를 들어, 상기 콜리메이션 컴포넌트(6020)는 적어도 하나 이상의 콜리메이션 엘리먼트를 포함하는 적어도 하나 이상의 콜리메이션 유닛을 포함할 수 있으며, 상기 적어도 하나 이상의 콜리메이션 유닛이 어레이로 배열된 형태로 구현될 수 있으나, 이에 한정되지 않는다.
또한, 상기 콜리메이션 컴포넌트(6020)는 상기 VCSEL array(6010)에 대응되어 형성될 수 있다.
예를 들어, 상기 콜리메이션 컴포넌트(6020)는 상기 VCSEL array(6010)에 대응되도록 어레이로 배열될 수 있으나, 이에 한정되지 않는다.
또한, 예를 들어, 상기 콜리메이션 컴포넌트(6020)는 상기 VCSEL array(6010)에 포함되는 VCSEL emitter에 대응되는 콜리메이션 엘리먼트를 포함할 수 있으나, 이에 한정되지 않는다.
또한, 예를 들어, 상기 콜리메이션 컴포넌트(6020)는 상기 VCSEL array(6010)에 포함되는 VCSEL unit에 대응되는 콜리메이션 유닛을 포함할 수 있으나, 이에 한정되지 않는다.
또한, 예를 들어, 상기 콜리메이션 컴포넌트(6020)는 상기 VCSEL array(6010)에 포함되는 VCSEL unit에 대응되는 콜리메이션 엘리먼트를 포함할 수 있으나, 이에 한정되지 않는다.
또한, 상기 스티어링 컴포넌트(6030)는 상기 콜리메이션 컴포넌트(6020)로부터 콜리메이션된 레이저를 스티어링 할 수 있다.
예를 들어, 상기 VCSEL array(6010)에 포함되는 VCSEL emitter로부터 출력된 레이저가 상기 콜리메이션 컴포넌트(6020)로부터 콜리메이션 된 경우, 상기 스티어링 컴포넌트(6030)는 상기 VCSEL emitter로부터 출력되어 상기 콜리메이션 컴포넌트(6020)로부터 콜리메이션 된 레이저를 소정의 각도로 스티어링 할 수 있으나, 이에 한정되지 않는다.
또한, 예를 들어, 상기 VCSEL array(6010)에 포함되는 VCSEL emitter로부터 출력된 레이저가 상기 콜리메이션 컴포넌트(6020)로부터 콜리메이션 된 경우, 상기 스티어링 컴포넌트(6030)는 상기 VCSEL emitter를 포함하는 VCSEL unit으로부터 출력되어 상기 콜리메이션 컴포넌트(6020)로부터 각각 콜리메이션 된 레이저를 소정의 각도로 스티어링 할 수 있으나, 이에 한정되지 않는다.
또한, 예를 들어, 상기 VCSEL array(6010)에 포함되는 VCSEL unit으로부터 출력된 레이저가 상기 콜리메이션 컴포넌트(6020)로부터 콜리메이션 된 경우, 상기 스티어링 컴포넌트(6030)는 상기 VCSEL unit으로부터 출력되어 상기 콜리메이션 컴포넌트(6020)로부터 콜리메이션 된 레이저를 소정의 각도로 스티어링 할 수 있으나, 이에 한정되지 않는다.
또한, 스티어링 되는 소정의 각도는 0도, 1도, 2도, 3도, 4도, 5도, 6도, 7도, 8도, 9도, 10도, 20도, 30도, 40도, 50도, 60도, 70도, 80도, 90도, 100도, 110도, 120도, 130도, 140도, 150도, 160도, 170도, 180도 등 다양한 각도가 될 수 있으나, 이에 한정되지 않는다.
또한, 상기 스티어링 컴포넌트(6030)는 어레이로 구현될 수 있다.
예를 들어, 상기 스티어링 컴포넌트(6030)는 적어도 하나 이상의 스티어링 엘리먼트를 포함할 수 있으며, 상기 적어도 하나 이상의 스티어링 엘리먼트가 어레이로 배열된 형태로 구현될 수 있으나, 이에 한정되지 않는다.
또한, 예를 들어, 상기 스티어링 컴포넌트(6030)는 적어도 하나 이상의 스티어링 엘리먼트를 포함하는 적어도 하나 이상의 스티어링 유닛을 포함할 수 있으며, 상기 적어도 하나 이상의 스티어링 유닛이 어레이로 배열된 형태로 구현될 수 있으나, 이에 한정되지 않는다.
또한, 상기 스티어링 컴포넌트(6030)는 상기 VCSEL array(6010)에 대응되어 형성될 수 있다.
예를 들어, 상기 스티어링 컴포넌트(6030)는 상기 VCSEL array(6010)에 대응되도록 어레이로 배열될 수 있으나, 이에 한정되지 않는다.
또한, 예를 들어, 상기 스티어링 컴포넌트(6030)는 상기 VCSEL array(6010)에 포함되는 VCSEL emitter에 대응되는 스티어링 엘리먼트를 포함할 수 있으나, 이에 한정되지 않는다.
또한, 예를 들어, 상기 스티어링 컴포넌트(6030)는 상기 VCSEL array(6010)에 포함되는 VCSEL unit에 대응되는 스티어링 유닛을 포함할 수 있으나, 이에 한정되지 않는다.
또한, 예를 들어, 상기 스티어링 컴포넌트(6030)는 상기 VCSEL array(6010)에 포함되는 VCSEL unit에 대응되는 스티어링 엘리먼트를 포함할 수 있으나, 이에 한정되지 않는다.
또한, 상기 스티어링 컴포넌트(6030)는 상기 콜리메이션 컴포넌트(6020)에 대응되어 형성될 수 있다.
예를 들어, 상기 스티어링 컴포넌트(6030)는 상기 콜리메이션 컴포넌트(6020)에 대응되도록 어레이로 배열될 수 있으나, 이에 한정되지 않는다.
또한, 예를 들어, 상기 스티어링 컴포넌트(6030)는 상기 콜리메이션 엘리먼트에 대응되는 스티어링 엘리먼트를 포함할 수 있으나, 이에 한정되지 않는다.
또한, 예를 들어, 상기 스티어링 컴포넌트(6030)는 상기 콜리메이션 유닛에 대응되는 스티어링 엘리먼트를 포함할 수 있으나, 이에 한정되지 않는다.
또한, 예를 들어, 상기 스티어링 컴포넌트(6030)는 상기 콜리메이션 유닛에 대응되는 스티어링 유닛을 포함할 수 있으나, 이에 한정되지 않는다.
또한, 상기 스티어링 컴포넌트(6030)는 상기 VCSEL array(6010)로부터 출력된 레이저를 다양한 방향으로 스티어링 할 수 있다.
예를 들어, 상기 스티어링 컴포넌트(6030)는 제1 레이저(6001)를 제1 방향으로 스티어링 할 수 있으며, 제2 레이저(6002)를 제2 방향으로 스티어링 할 수 있고, 제3 레이저(6003)를 제3 방향으로 스티어링 할 수 있다.
이 때, 도 129에 도시된 바와 같이, 상기 제1 레이저(6001)는 상기 VCSEL array(6010)의 우상측 부분으로부터 출력된 레이저 일 수 있으며, 상기 제2 레이저(6002)는 상기 VCSEL array(6010)의 우측 부분으로부터 출력된 레이저일 수 있으며, 상기 제3 레이저(6003)는 상기 VCSEL array(6010)의 우하측 부분으로부터 출력된 레이저일 수 있으나, 이에 한정되지 않는다.
또한, 도 129에 도시된 바와 같이, 상기 제1 레이저(6001)가 스티어링 되는 상기 제1 방향은 시야각(FOV)의 우상측 방향을 의미할 수 있으며, 상기 제2 레이저(6002)가 스티어링 되는 상기 제2 방향은 시야각(FOV)의 우측 방향을 의미할 수 있고, 상기 제3 레이저(6003)가 스티어링 되는 상기 제3 방향은 시야각(FOV)의 우하측 방향을 의미할 수 있으나, 이에 한정되지 않는다.
또한, 도 129에 도시된 바와 같이 상기 레이저 출력부(6000)는 레이저가 출력된 위치와 레이저가 스티어링 되는 방향이 대응되도록 형성될 수 있다.
또한, 도 129에 도시된 바와 같이 상기 레이저 출력부(6000)가 출력되는 레이저의 위치와 레이저가 스티어링 되는 방향이 대응되도록 형성되는 경우, 상기 레이저 출력부(6000)는 스티어링 되는 레이저의 연장선이 형성하는 초점 영역을 가질 수 있다.
또한, 상기 초점 영역은 거리측정의 원점으로 이용될 수 있다.
도 130은 일 실시예에 따른 레이저 출력부에 대해 설명하기 위한 도면이다.
도 130을 참조하면, 일 실시예에 따른 레이저 출력부(6050)는 VCSEL array(6060), 콜리메이션 컴포넌트(6070) 및 스티어링 컴포넌트(6080) 중 적어도 일부를 포함할 수 있으나, 이에 한정되지 않는다.
이 때, 상기 VCSEL array(6050), 상기 콜리메이션 컴포넌트(6070) 및 상기 스티어링 컴포넌트(6080)에 대하여 상술한 내용이 적용될 수 있으므로, 중복되는 서술은 생략하기로 한다.
한편, 상기 스티어링 컴포넌트(6080)는 상기 VCSEL array(6060)로부터 출력된 레이저를 다양한 방향으로 스티어링 할 수 있다.
예를 들어, 상기 스티어링 컴포넌트(6080)는 제1 레이저(6051)를 제1 방향으로 스티어링 할 수 있으며, 제2 레이저(6052)를 제2 방향으로 스티어링 할 수 있고, 제3 레이저(6053)를 제3 방향으로 스티어링 할 수 있다.
이 때, 도 130에 도시된 바와 같이, 상기 제1 레이저(6051)는 상기 VCSEL array(6060)의 상측 부분으로부터 출력된 레이저 일 수 있으며, 상기 제2 레이저(6052)는 상기 VCSEL array(6060)의 중앙 부분으로부터 출력된 레이저일 수 있고, 상기 제3 레이저(6053)는 상기 VCSEL array(6060)의 하측 부분으로부터 출력된 레이저 일 수 있으나, 이에 한정되지 않는다.
또한, 도 130에 도시된 바와 같이, 상기 제1 레이저(6051)가 스티어링 되는 상기 제1 방향은 시야각(FOV)의 하측 방향을 의미할 수 있으며, 상기 제2 레이저(6052)가 스티어링 되는 상기 제2 방향은 시야각(FOV)의 중앙 방향을 의미할 수 있고, 상기 제3 레이저(6053)가 스티어링 되는 상기 제3 방향은 시야각(FOV)의 상측 방향을 의미할 수 있으나, 이에 한정되지 않는다.
또한, 도 130에 도시된 바와 같이 상기 레이저 출력부(6050)는 레이저가 출력된 위치와 레이저가 스티어링 되는 방향이 상반되도록 형성될 수 있다.
또한, 도 130에 도시된 바와 같이 상기 레이저 출력부(6050)가 출력되는 레이저의 위치와 레이저가 스티어링 되는 방향이 상반되도록 형성되는 경우, 상기 레이저 출력부(6050)는 스티어링 되는 레이저가 모이는 초점 영역을 가질 수 있다.
또한, 상기 초점 영역은 거리측정의 원점으로 이용될 수 있다.
도 131은 일 실시예에 따른 레이저 출력부에 대해 설명하기 위한 도면이다.
도 131을 참조하면, 일 실시예에 따른 레이저 출력부(6100)는 VCSEL array(6110), 콜리메이션 컴포넌트(6120) 및 스티어링 컴포넌트(6130) 중 적어도 일부를 포함할 수 있으나, 이에 한정되지 않는다.
이 때, 상기 VCSEL array(6110), 상기 콜리메이션 컴포넌트(6120) 및 상기 스티어링 컴포넌트(6130)에 대하여 상술한 내용이 적용될 수 있으므로, 중복되는 서술은 생략하기로 한다.
한편, 상기 VCSEL array(6110)는 상기 VCSEL array(6110)에 포함되는 적어도 하나 이상의 VCSEL emitter 중 일부만 동작할 수 있다.
예를 들어, 상기 VCSEL array(6110)는 소정의 그룹 별로 동작할 수 있으며, 보다 구체적으로, 상기 VCSEL array(6110)에 포함되는 VCSEL emitter가 개별적으로 동작할 수 있으며, 적어도 하나 이상의 VCSEL emitter를 포함하는 VCSEl unit이 하나의 그룹으로 동작할 수 있으나, 이에 한정되지 않는다.
또한, 상기 VCSEL array(6110)는 소정의 그룹 별로 다른 시점에 동작할 수 있으며, 보다 구체적으로, 상기 VCSEL array(6110)에 포함되는 VCSEL emitter 중 제1 VCSEL emitter가 동작한 후 제2 VCSEL emitter가 동작할 수 있거나, 상기 VCSEL array(6110)에 포함되는 VCSEL unit 중 제1 VCSEL unit이 동작한 후 제2 VCSEL unit이 동작 할 수도 있으나, 이에 한정되지 않는다.
예를 들어, 도 131에 도시된 바와 같이 제1 시점에 제1 레이저(6101)가 출력될 수 있으며, 제2 시점에 제2 레이저(6102)가 출력될 수 있으며, 이 때, 상기 제1 레이저(6101)는 제1 VCSEL emitter 또는 제1 VCSEL unit으로부터 출력된 레이저일 수 있고, 상기 제2 레이저(6102)는 제2 VCSEL emitter 또는 제2 VCSEL unit으로부터 출력된 레이저일 수 있으나, 이에 한정되지 않는다.
또한, 상기 스티어링 컴포넌트(6130)는 상기 VCSEL array(6110)로부터 출력된 레이저를 다양한 방향으로 스티어링 할 수 있다.
예를 들어, 상기 스티어링 컴포넌트(6130)는 제1 레이저(6101)를 제1 방향으로 스티어링 할 수 있으며, 제2 레이저(6102)를 제2 방향으로 스티어링 할 수 있다.
또한, 도 131에 도시된 바와 같이, 상기 제1 레이저(6101)는 상기 VCSEL array(6110)의 우상측 부분에 위치하는 제1 그룹으로부터 출력된 레이저일 수 있으며, 상기 제2 레이저(6102)는 상기 VCSEL array(6110)의 우하측 부분에 위치하는 제2 그룹으로부터 출력된 레이저 일 수 있으나, 이에 한정되지 않는다.
또한, 상기 제1 및 제2 그룹은 하나의 VCSEL emitter를 의미할 수 있으며, 적어도 하나 이상의 VCSEL emitter를 포함하는 VCSEL unit을 의미할 수도 있으나, 이에 한정되지 않는다.
또한, 도 131에 도시된 바와 같이, 상기 제1 레이저(6101)와 상기 제2 레이저(6102)가 출력되는 시점이 상이할 수 있다. 예를 들어, 상기 제1 레이저(6101)는 제1 시점에 상기 제1 그룹으로부터 출력될 수 있으며, 상기 제2 레이저(6102)는 제2 시점에 상기 제2 그룹으로부터 출력될 수 있으나, 이에 한정되지 않는다.
또한, 상기 레이저 출력부(6100)로부터 출력되는 레이저는 시간에 따라 조사되는 방향이 변할 수 있다. 예를 들어, 제1 시점에 출력되는 제1 레이저(6101)는 시야각의 우상측 방향으로 조사될 수 있으며, 제2 시점에 출력되는 제2 레이저(6102)는 시야각의 우하측 방향으로 조사될 수 있다.
따라서, 이와 같이 시간에 따라 조사되는 방향이 변하도록 레이저 출력부(6100)를 설계하는 것은 기계적인 구동 없이 스캔 가능한 범위를 확장시킬 수 있으며, 이는 상기 레이저 출력부(6100)가 배치되는 라이다 장치를 솔리드 스테이트 라이다 장치(Solid-state-LiDAR device)로 구현할 수 있게 한다.
이하에서는, 본 출원의 일 실시예에 따른 레이저 출력부의 구성에 대하여 상세하게 기술하기로 한다. 다만, 설명의 편의를 위해 레이저 출력 어레이는 VCSEL array로 기술할 수 있으며, 콜리메이션 컴포넌트는 마이크로 렌즈로 기술할 수 있으나, 이에 한정되지 않으며, 다양한 레이저 출력 어레이 및 콜리메이션 컴포넌트가 될 수 있다.
도 132는 일 실시예에 따른 레이저 출력부의 구성에 대하여 설명하기 위한 도면이다.
도 132을 참조하면, 일 실시예에 따른 레이저 출력부(6200)는 VCSEL array(6210) 및 콜리메이션 컴포넌트(6220)를 포함할 수 있으나, 이에 한정되지 않는다.
이 때, 상기 VCSEL array(6210)는 적어도 하나 이상의 VCSEL emitter를 포함할 수 있으며, 예를 들어, 상기 VCSEL array(6210)는 제1 VCSEL emitter(6211)를 포함할 수 있다.
또한, 상기 콜리메이션 컴포넌트(6220)는 마이크로 렌즈 어레이(Micro lens array)를 포함할 수 있으며, 상기 마이크로 렌즈 어레이는 적어도 하나 이상의 마이크로 렌즈 엘리먼트를 포함할 수 있고, 적어도 하나 이상의 마이크로 렌즈 엘리먼트를 포함하는 마이크로 렌즈 유닛을 포함할 수 있다.
또한, 도 132의 (a)를 참조하면, 상기 콜리메이션 컴포넌트(6220)는 상기 VCSEL array(6210)로부터 출력된 레이저를 콜리메이션 할 수 있다. 다만, 이에 대하여 상술한 내용이 적용될 수 있으므로 중복되는 서술은 생략하기로 한다.
또한, 도 132의 (a)를 참조하면, 상기 콜리메이션 컴포넌트(6220)는 상기 VCSEL array(6210)에 대응되어 형성될 수 있다. 예를 들어, 상기 콜리메이션 컴포넌트(6220)에 포함되는 마이크로 렌즈 엘리먼트는 상기 VCSEL array(6210)에 포함되는 VCSEL emitter에 대응되어 형성될 수 있으나, 이에 한정되지 않는다.
또한, 상기 콜리메이션 컴포넌트(6220)의 콜리메이션 효율을 증가시키기 위하여 상기 VCSEL array(6210)와 상기 콜리메이션 컴포넌트(6220)는 소정의 관계를 가지고 배치될 수 있다.
따라서, 이하에서는 상기 VCSEL array(6210)와 상기 콜리메이션 컴포넌트(6220)의 배치 관계에 대하여 보다 상세하게 기술하기로 한다.
도 132의 (b)를 참조하면, 상기 VCSEL array(6210)에 포함되는 상기 제1 VCSEL emitter(6211)는 제1 직경(6230)을 가지도록 형성될 수 있으며, 이 때, 상기 제1 직경(6230)은 상기 제1 VCSEL emitter(6211)의 크기를 의미하는 것으로, 한변의 길이, 직경 등 상기 제1 VCSEL emitter(6211)의 크기를 1차원으로 표현하기 위한 것일 수 있다.
또한, 도 132의 (b)를 참조하면, 상기 VCSEL array(6210)에 포함되는 상기 제1 VCSEL emitter(6211)와 제2 VCSEL emitter(6212)는 제1 간격(6250)을 가지도록 배치될 수 있으며, 이 때, 상기 제1 간격(6250)은 상기 제1 VCSEL emitter(6211)와 상기 제2 VCSEL emitter(6212) 사이의 거리를 1차원으로 표현하기 위한 것일 수 있다.
또한, 도 132의 (b)를 참조하면, 상기 콜리메이션 컴포넌트(6220)에 포함되는 제1 마이크로 렌즈 엘리먼트(6221)는 제2 직경(6240)을 가지도록 형성될 수 있으며, 이 때, 상기 제2 직경(6240)은 상기 제1 마이크로 렌즈 엘리먼트(6221)의 크기를 의미하는 것으로, 한변의 길이, 직경 등 상기 제1 마이크로 렌즈 엘리먼트(6221)의 크기를 1차원으로 표현하기 위한 것일 수 있다.
또한, 도 132의 (b)를 참조하면, 상기 제1 마이크로 렌즈 엘리먼트(6221)는 상기 제1 VCSEL emitter(6211)로부터 출력된 레이저를 콜리메이션 시키기 위하여 상기 제1 VCSEL emitter(6211)에 대응되도록 배치될 수 있다.
또한, 도 132의 (b)를 참조하면, 콜리메이션 효율을 증가시키기 위하여, 상기 제1 마이크로 렌즈 엘리먼트(6221)의 상기 제2 직경(6240)은 상기 제1 VCSEL emitter(6211)의 상기 제1 직경(6230) 보다 클 수 있다. 예를 들어, 상기 제1 VCSEL emitter(6211)의 상기 제1 직경(6230)은 14um 이며, 상기 제1 마이크로 렌즈 엘리먼트(6221)의 상기 제2 직경(6240)은 140um 일 수 있으나, 이에 한정되지 않는다.
또한, 도 132의 (b)를 참조하면, 콜리메이션 효율을 증가시키기 위하여, 상기 제1 마이크로 렌즈 엘리먼트(6221)의 상기 제2 직경(6240)은 상기 제1 간격(6250)에 대응될 수 있다. 예를 들어, 상기 제1 간격(6250)은 140um 이며, 상기 제2 직경(6240)은 140um 일 수 있으나, 이에 한정되지 않는다.
또한, 도 132의 (b)를 참조하면, 콜리메이션 효율을 증가시키기 위하여, 상기 제1 간격(6250)은 상기 제1 VCSEL emitter(6211)의 상기 제1 직경(6230) 보다 클 수 있다. 예를 들어, 상기 제1 VCSEL emitter(6211)의 상기 제1 직경(6230)은 14um 이며, 상기 제1 간격(6250)은 140um일 수 있으나, 이에 한정되지 않는다.
또한, 도 132의 (b)를 참조하면, 콜리메이션 효율을 증가시키고, 열적 밀집도를 감소시키기 위하여, 상기 제1 간격(6250)은 상기 제1 VCSEL emitter(6211)의 상기 제1 직경(6230) 보다 일정 이상 클 수 있다. 예를 들어, 상기 제1 간격(6250)은 상기 제1 VCSEL emitter(6211)의 상기 제1 직경(6230)보다 5배 이상 클 수 있으나, 이에 한정되지 않는다.
도 133은 일 실시예에 따른 레이저 출력부의 구성에 대하여 설명하기 위한 도면이다.
도 133을 참조하면, 일 실시예에 따른 레이저 출력부(6300)는 VCSEL array(6310) 및 콜리메이션 컴포넌트(6320)를 포함할 수 있으나, 이에 한정되지 않는다.
이 때, 상기 VCSEL array(6310)는 적어도 하나 이상의 VCSEL emitter를 포함할 수 있으며, 예를 들어, 상기 VCSEL array(6310)는 제1 VCSEL emitter(6311), 제2 VCSEL emitter(6312) 및 제3 VCSEL emitter(6313)를 포함할 수 있다.
또한, 상기 콜리메이션 컴포넌트(6320)는 마이크로 렌즈 어레이(Micro lens array)를 포함할 수 있으며, 상기 마이크로 렌즈 어레이는 적어도 하나 이상의 마이크로 렌즈 엘리먼트를 포함할 수 있고, 적어도 하나 이상의 마이크로 렌즈 엘리먼트를 포함하는 마이크로 렌즈 유닛을 포함할 수 있다.
또한, 도 133의 (a)를 참조하면, 상기 콜리메이션 컴포넌트(6320)는 상기 VCSEL array(6310)로부터 출력된 레이저를 콜리메이션 할 수 있다. 다만, 이에 대하여 상술한 내용이 적용될 수 있으므로 중복되는 서술은 생략하기로 한다.
또한, 도 133의 (a)를 참조하면, 상기 콜리메이션 컴포넌트(6320)는 상기 VCSEL array(6210)에 대응되어 형성될 수 있다. 예를 들어, 상기 콜리메이션 컴포넌트(6320)에 포함되는 마이크로 렌즈 엘리먼트는 상기 VCSEL array(6310)에 포함되는 VCSEL unit에 대응되어 형성될 수 있으나, 이에 한정되지 않는다.
또한, 상기 콜리메이션 컴포넌트(6320)의 콜리메이션 효율을 증가시키기 위하여 상기 VCSEL array(6310)와 상기 콜리메이션 컴포넌트(6320)는 소정의 관계를 가지고 배치될 수 있다.
따라서, 이하에서는 상기 VCSEL array(6310)와 상기 콜리메이션 컴포넌트(6320)의 배치 관계에 대하여 보다 상세하게 기술하기로 한다.
도 133의 (b)를 참조하면, 상기 VCSEL array(6310)에 포함되는 상기 제1 VCSEL emitter(6311)는 제1 직경(6330)를 가지도록 형성될 수 있으며, 이 때, 상기 제1 직경(6330)은 상기 제1 VCSEL emitter(6311)의 크기를 의미하는 것으로, 한 변의 길이, 직경 등 상기 제1 VCSEL emitter(6311)의 크기를 1차원으로 표현하기 위한 것일 수 있다.
또한, 도 133의 (b)를 참조하면, 상기 VCSEL array(6310)에 포함되는 상기 제1 VCSEL emitter(6311), 상기 제2 VCSEL emitter(6312) 및 상기 제3 VCSEL emitter(6313)를 포함하는 제1 VCSEL unit은 제2 직경(6350)을 가지도록 형성될 수 있으며, 이 때, 상기 제2 직경(6350)은 상기 제1 VCSEL unit의 크기를 의미하는 것으로, 한변의 길이, 직경 등 상기 제1 VCSEL unit의 크기를 1차원으로 표현하기 위한 것일 수 있다.
또한, 도 133의 (b)를 참조하면, 상기 콜리메이션 컴포넌트(6320)에 포함되는 제1 마이크로 렌즈 엘리먼트(6321)는 제3 직경(6240)을 가지도록 형성될 수 있으며, 이 때, 상기 제3 직경(6340)은 상기 제1 마이크로 렌즈 엘리먼트(6321)의 크기를 의미하는 것으로, 한변의 길이, 직경 등 상기 제1 마이크로 렌즈 엘리먼트(6321)의 크기를 1차원으로 표현하기 위한 것일 수 있다.
또한, 도 133의 (b)를 참조하면, 상기 제1 마이크로 렌즈 엘리먼트(6321)는 상기 제1 VCSEL unit으로부터 출력된 레이저를 콜리메이션 시키기 위하여 상기 제1 VCSEL unit에 대응 되도록 배치될 수 있다.
또한, 도 133의 (b)를 참조하면, 콜리메이션 효율을 증가시키기 위하여 상기 제1 마이크로 렌즈 엘리먼트(6321)의 상기 제3 직경(6340)은 상기 제1 VCSEL unit의 상기 제2 직경(6350) 보다 클 수 있다. 예를 들어, 상기 제1 VCSEL unit의 상기 제2 직경(6350)은 1.3mm 이며, 상기 제1 마이크로 렌즈 엘리먼트(6321)의 상기 제3 직경(6340)은 1.4mm 일 수 있으나, 이에 한정되지 않는다.
도 134은 일 실시예에 따른 레이저 출력부의 구성에 대하여 설명하기 위한 도면이다.
도 134를 참조하면, 일 실시예에 따른 레이저 출력부(6400)는 VCSEL array(6410) 및 콜리메이션 컴포넌트(6420)를 포함할 수 있으나, 이에 한정되지 않는다.
이 때, 상기 VCSEL array(6410)는 적어도 하나 이상의 VCSEL emitter를 포함할 수 있으며, 예를 들어, 상기 VCSEL array(6410)는 제1 VCSEL emitter(6411), 제2 VCSEL emitter(6412) 및 제3 VCSEL emitter(6413)를 포함할 수 있다.
또한, 상기 VCSEL array(6410)는 적어도 하나 이상의 VCSEL emitter를 포함하는 VCSEL unit을 포함할 수 있으며, 예를 들어, 상기 제1 VCSEL emitter(6411), 상기 제2 VCSEL emitter(6412) 및 상기 제3 VCSEL emitter(6413)를 포함하는 제1 VCSEL unit을 포함할 수 있다.
또한, 상기 콜리메이션 컴포넌트(6420)는 마이크로 렌즈 어레이(Micro lens array)를 포함할 수 있으며, 상기 마이크로 렌즈 어레이는 적어도 하나 이상의 마이크로 렌즈 엘리먼트를 포함할 수 있고, 예를 들어, 상기 콜리메이션 컴포넌트(6420)는 제1 마이크로 렌즈 엘리먼트(6421), 제2 마이크로 렌즈 엘리먼트(6422) 및 제3 마이크로 렌즈 엘리먼트(6423)를 포함할 수 있다.
또한, 상기 콜리메이션 컴포넌트(6420)는 적어도 하나 이상의 마이크로 렌즈 엘리먼트를 포함하는 마이크로 렌즈 유닛을 포함할 수 있으며, 예를 들어, 상기 제1 마이크로 렌즈 엘리먼트(6421), 제2 마이크로 렌즈 엘리먼트(6422) 및 제3 마이크로 렌즈 엘리먼트(6423)을 포함하는 제1 마이크로 렌즈 유닛을 포함할 수 있다.
또한, 도 134을 참조하면, 상기 콜리메이션 컴포넌트(6420)는 상기 VCSEL array(6410)로부터 출력된 레이저를 콜리메이션 할 수 있다. 다만, 이에 대하여 상술한 내용이 적용될 수 있으므로 중복되는 서술은 생략하기로한다.
또한, 도 134을 참조하면, 상기 VCSEL array(6410)로부터 출력되어 상기 콜리메이션 컴포넌트(6420)를 통해 콜리메이션 된 레이저는 일정 각도 이상의 다이버전스 각도를 가질 수 있다. 예를 들어, 상기 VCSEL array(6410)로부터 출력되어 상기 콜리메이션 컴포넌트(6420)를 통해 콜리메이션 된 레이저는 1.2도의 다이버전스 각도를 가질 수 있으나, 이에 한정되지 않는다.
또한, 도 134을 참조하면, VCSEL unit에 포함되는 적어도 하나 이상의 VCSEL emitter로부터 출력된 적어도 하나 이상의 레이저는 하나의 빔 프로파일을 형성할 수 있다. 예를 들어, 상기 제1, 제2 및 제3 VCSEL emitter(6411,6412,6413)로부터 출력된 제1, 제2 및 제3 레이저는 상기 제1, 제2 및 제3 마이크로 렌즈 엘리먼트(6421,6422,6423)로부터 각각 콜리메이션 될 수 있으며, 하나의 빔 프로파일을 형성할 수 있으나, 이에 한정되지 않는다.
또한, 도 134을 참조하면, VCSEL unit에 포함되는 적어도 둘 이상의 VCSEL emitter로부터 출력된 적어도 둘 이상의 레이저는 적어도 일부 오버랩 될 수 있으며, 상기 오버랩 된 영역을 기초로 하나의 빔 프로파일을 형성할 수 있다. 예를 들어, 상기 제1, 제2 및 제3 레이저는 상기 제1, 제2 및 제3 마이크로 렌즈 엘리먼트(6421,6422,6423)을 통해 일정 다이버전스 각도를 가지도록 콜리메이션 될 수 있으며, 상기 다이버전스 각도로 인해 적어도 일부 오버랩 될 수 있고, 상기 오버랩 된 영역을 기초로 하나의 빔 프로파일을 형성할 수 있으나, 이에 한정되지 않는다.
도 135는 일 실시예에 따른 레이저 출력부의 구성에 대하여 설명하기 위한 도면이다.
도 135를 참조하면, 일 실시예에 따른 레이저 출력부(6500)는 VCSEL array(6510), 콜리메이션 컴포넌트(6520) 및 스티어링 컴포넌트(6530)를 포함할 수 있으나, 이에 한정되지 않는다.
이 때, 상기 VCSEL array(6510)는 적어도 하나 이상의 VCSEL emitter를 포함할 수 있으며, 예를 들어, 상기 VCSEL array(6510)는 제1 VCSEL emitter(6511), 제2 VCSEL emitter(6512) 및 제3 VCSEL emitter(6513)를 포함할 수 있다.
또한, 상기 VCSEL array(6510)는 적어도 하나 이상의 VCSEL emitter를 포함하는 VCSEL unit을 포함할 수 있다. 예를 들어, 상기 VCSEL array(6510)는 제1 VCSEL emitter(6511)를 포함하는 제1 VCSEL unit, 제2 VCSEL emitter(6512)를 포함하는 제2 VCSEL unit 및 제3 VCSEL emitter(6513)를 포함하는 제3 VCSEL unit을 포함할 수 있다.
또한, 상기 콜리메이션 컴포넌트(6520)는 마이크로 렌즈 어레이(Micro lens array)를 포함할 수 있으며, 상기 마이크로 렌즈 어레이는 적어도 하나 이상의 마이크로 렌즈 엘리먼트를 포함할 수 있다. 예를 들어, 상기 콜리메이션 컴포넌트(6520)는 제1 마이크로 렌즈 엘리먼트(6521), 제2 마이크로 렌즈 엘리먼트(6522) 및 제3 마이크로 렌즈 엘리먼트(6523)를 포함할 수 있다.
또한, 상기 콜리메이션 컴포넌트(6520)는 적어도 하나 이상의 마이크로 렌즈 엘리먼트를 포함하는 마이크로 렌즈 유닛을 포함할 수 있다. 예를 들어, 상기 콜리메이션 컴포넌트(6520)는 상기 제1 마이크로 렌즈 엘리먼트(6521)를 포함하는 제1 마이크로 렌즈 유닛, 상기 제2 마이크로 렌즈 엘리먼트(6522)를 포함하는 제2 마이크로 렌즈 유닛 및 상기 제3 마이크로 렌즈 엘리먼트(6523)를 포함하는 제3 마이크로 렌즈 유닛을 포함할 수 있다.
또한, 상기 스티어링 컴포넌트(6530)는 프리즘 어레이(Prism array)를 포함할 수 있으며, 상기 프리즘 어레이는 적어도 하나 이상의 프리즘 엘리먼트를 포함할 수 있다. 예를 들어, 상기 스티어링 컴포넌트(6530)는 제1 프리즘 엘리먼트(6531), 제2 프리즘 엘리먼트(6532) 및 제3 프리즘 엘리먼트(6533)를 포함할 수 있다.
또한, 도 135의 (a)를 참조하면, 상기 콜리메이션 컴포넌트(6520)는 상기 VCSEL array(6510)로부터 출력된 레이저를 콜리메이션 할 수 있다. 다만, 이에 대하여 상술한 내용이 적용될 수 있으므로 중복되는 서술은 생략하기로 한다.
또한, 도 135의 (a)를 참조하면, 상기 스티어링 컴포넌트(6530)는 상기 VCSEL array(6510)로부터 출력되어 상기 콜리메이션 컴포넌트(6520)를 통해 콜리메이션 된 레이저를 스티어링 할 수 있다. 다만, 이에 대하여 상술한 내용이 적용될 수 있으므로 중복되는 서술은 생략하기로 한다.
또한, 도 135의 (a)를 참조하면, 상기 스티어링 컴포넌트(6530)는 상기 VCSEL array(6510)에 포함되는 VCSEL emitter로부터 출력된 레이저를 스티어링 할 수 있다. 예를 들어, 상기 스티어링 컴포넌트(6530)에 포함되는 상기 제1 프리즘 엘리먼트(6531)는 상기 제1 VCSEL emitter로부터 출력된 레이저를 스티어링 할 수 있으나, 이에 한정되지 않는다.
또한, 도 135의 (a)를 참조하면, 상기 스티어링 컴포넌트(6530)는 상기 VCSEL array(6510)에 포함되는 VCSEL unit으로부터 출력된 레이저를 스티어링 할 수 있다. 예를 들어, 상기 스티어링 컴포넌트(6530)에 포함되는 상기 제1 프리즘 엘리먼트(6531)는 상기 제1 VCSEL emitter(6511)를 포함하는 제1 VCSEL unit으로부터 출력된 레이저를 스티어링 할 수 있으나, 이에 한정되지 않는다.
또한, 도 135의 (a)를 참조하면, 상기 스티어링 컴포넌트(6530)는 상기 VCSEL array(6510)에 포함되는 VCSEL unit으로부터 출력된 적어도 하나의 레이저를 포함하는 레이저 그룹을 동일한 각도로 스티어링 할 수 있다. 예를 들어, 상기 스티어링 컴포넌트(6530)에 포함되는 상기 제1 프리즘 엘리먼트(6531)는 상기 제1 VCSEL emitter(6511)를 포함하는 제1 VCSEL unit으로부터 출력된 제1 레이저 그룹(6541)을 제1 각도로 스티어링 할 수 있으나, 이에 한정되지 않는다.
또한, 도 135의 (a)를 참조하면, 상기 스티어링 컴포넌트(6530)는 상기 VCSEL array(6510)에 포함되는 적어도 둘 이상의 VCSEL unit으로부터 출력된 적어도 둘 이상의 레이저 그룹을 서로 다른 각도로 스티어링 할 수 있다. 예를 들어, 상기 제1 프리즘 엘리먼트(6531)는 상기 제1 VCSEL emitter(6511)를 포함하는 제1 VCSEL unit으로부터 출력된 제1 레이저 그룹(6541)을 제1 각도로 스티어링 하며, 상기 제2 프리즘 엘리먼트(6532)는 상기 제2 VCSEL emitter(6512)를 포함하는 제2 VCSEL unit으로부터 출력된 제2 레이저 그룹(6542)을 제2 각도로 스티어링 하고, 상기 제3 프리즘 엘리먼트(6533)는 상기 제3 VCSEL emitter(6513)를 포함하는 제3 VCSEL unit으로부터 출력된 제3 레이저 그룹(6543)을 제3 각도로 스티어링 할 수 있으나, 이에 한정되지 않는다.
또한, 상기 VCSEL array(6510)와 상기 콜리메이션 컴포넌트(6520)의 배치 관계에 대하여 상술한 내용이 적용될 수 있으므로, 중복되는 서술은 생략하기로 한다.
한편, 상기 스티어링 컴포넌트(6530)의 스티어링 효율을 증가시키기 위하여 상기 VCSEL array(6510), 상기 콜리메이션 컴포넌트(6520) 및 상기 스티어링 컴포넌트(6530)는 소정의 관계를 가지도록 배치될 수 있다.
따라서, 이하에서는 상기 VCSEL array(6510), 상기 콜리메이션 컴포넌트(6520) 및 상기 스티어링 컴포넌트(6530)의 배치 관게에 대하여 보다 상세하게 기술하기로 한다.
도 135의 (b)를 참조하면, 상기 VCSEL array(6510)에 포함되는 상기 제1 VCSEL emitter(6511)를 포함하는 상기 제1 VCSEL unit은 제1 직경(6550)을 가지도록 형성될 수 있으며, 이 때, 상기 제1 직경(6550)은 상기 제1 VCSEL unit의 크기를 의미하는 것으로, 한 변의 길이, 직경 등 상기 제1 VCSEL unit의 크기를 1차원으로 표현하기 위한 것일 수 있다.
또한, 도 135의 (b)를 참조하면, 상기 콜리메이션 컴포넌트(6520)에 포함되는 상기 제1 마이크로 렌즈 엘리먼트(6521)를 포함하는 제1 마이크로 렌즈 유닛은 제2 직경(6560)을 가지도록 형성될 수 있으며, 이 때, 상기 제2 직경(6560)은 상기 제1 마이크로 렌즈 유닛의 크기를 의미하는 것으로, 한 변의 길이, 직경 등 상기 제1 마이크로 렌즈 유닛의 크기를 1차원으로 표현하기 위한 것일 수 있다.
또한, 도 135의 (b)를 참조하면, 상기 스티어링 컴포넌트(6530)에 포함되는 상기 제1 프리즘 엘리먼트(6531)는 제3 직경(6570)을 가지도록 형성될 수 있으며, 이 때, 상기 제3 직경(6570)은 상기 제1 프리즘 엘리먼트(6531)의 크기를 의미하는 것으로, 한 변의 길이, 직경 등 상기 제1 프리즘 엘리먼트(6531)의 크기를 1차원으로 표현하기 위한 것일 수 있다.
또한, 도 135의 (b)를 참조하면, 상기 제1 프리즘 엘리먼트(6531)는 상기 제1 VCSEL unit으로부터 출력된 제1 레이저 그룹을 스티어링 시키기 위하여 상기 제1 VCSEL unit에 대응 되도록 배치될 수 있다.
또한, 도 135의 (b)를 참조하면, 스티어링 효율을 증가시키기 위하여 상기 제1 프리즘 엘리먼트(6531)의 상기 제3 직경(6570)은 상기 제1 VCSEL unit의 상기 제1 직경(6550)보다 클 수 있다. 예를 들어, 상기 제1 VCSEL unit의 상기 제1 직경(6550)은 1.3mm 이며, 상기 제1 프리즘 엘리먼트(6531)의 상기 제3 직경(6570)은 1.4mm 일 수 있으나, 이에 한정되지 않는다.
또한, 도 135의 (b)를 참조하면, 상기 제1 프리즘 엘리먼트(6531)는 상기 제1 VCSEL unit 으로부터 출력되어 상기 제1 마이크로 렌즈 유닛을 통해 콜리메이션 되는 상기 제1 레이저 그룹을 스티어링 시키기 위하여 상기 제1 마이크로 렌즈 유닛에 대응 되도록 배치될 수 있다.
또한, 도 135의 (b)를 참조하면, 스티어링 효율을 증가시키기 위하여 상기 제1 프리즘 엘리먼트(6531)의 상기 제3 직경(6570)은 상기 제1 마이크로 렌즈 유닛의 상기 제2 직경(6560)보다 크거나 같을 수 있다. 예를 들어, 상기 제1 마이크로 렌즈 유닛의 상기 제2 직경(6560)은 1.4mm 이며, 상기 제1 프리즘 엘리먼트(6531)의 상기 제3 직경(6570)은 1.41mm 일 수 있으나, 이에 한정되지 않는다.
도 136은 일 실시예에 따른 레이저 출력부의 구성에 대하여 설명하기 위한 도면이다.
도 136을 참조하면, 일 실시예에 따른 레이저 출력부(6600)는 VCSEL array(6610), 콜리메이션 컴포넌트(6620) 및 스티어링 컴포넌트(6630)를 포함할 수 있으나, 이에 한정되지 않는다.
이 때, 상기 VCSEL array(6610)는 적어도 하나 이상의 VCSEL emitter를 포함할 수 있으며, 예를 들어, 상기 VCSEL array(6610)는 제1 VCSEL emitter(6611), 제2 VCSEL emitter(6612) 및 제3 VCSEL emitter(6613)를 포함할 수 있다.
또한, 상기 VCSEL array(6610)는 적어도 하나 이상의 VCSEL emitter를 포함하는 VCSEL unit을 포함할 수 있다. 예를 들어, 상기 VCSEL array(6610)는 제1 VCSEL emitter(6611)를 포함하는 제1 VCSEL unit, 제2 VCSEL emitter(6612)를 포함하는 제2 VCSEL unit 및 제3 VCSEL emitter(6613)를 포함하는 제3 VCSEL unit을 포함할 수 있다.
또한, 상기 콜리메이션 컴포넌트(6620)는 마이크로 렌즈 어레이(Micro lens array)를 포함할 수 있으며, 상기 마이크로 렌즈 어레이는 적어도 하나 이상의 마이크로 렌즈 엘리먼트를 포함할 수 있다. 예를 들어, 상기 콜리메이션 컴포넌트(6620)는 제1 마이크로 렌즈 엘리먼트(6621), 제2 마이크로 렌즈 엘리먼트(6622) 및 제3 마이크로 렌즈 엘리먼트(6623)를 포함할 수 있다.
또한, 상기 콜리메이션 컴포넌트(6620)는 적어도 하나 이상의 마이크로 렌즈 엘리먼트를 포함하는 마이크로 렌즈 유닛을 포함할 수 있다. 예를 들어, 상기 콜리메이션 컴포넌트(6620)는 상기 제1 마이크로 렌즈 엘리먼트(6621)를 포함하는 제1 마이크로 렌즈 유닛, 상기 제2 마이크로 렌즈 엘리먼트(6622)를 포함하는 제2 마이크로 렌즈 유닛 및 상기 제3 마이크로 렌즈 엘리먼트(6623)를 포함하는 제3 마이크로 렌즈 유닛을 포함할 수 있다.
또한, 상기 스티어링 컴포넌트(6630)는 프리즘 어레이(Prism array)를 포함할 수 있으며, 상기 프리즘 어레이는 적어도 하나 이상의 프리즘 엘리먼트를 포함할 수 있다. 예를 들어, 상기 스티어링 컴포넌트(6630)는 제1 프리즘 엘리먼트(6631), 제2 프리즘 엘리먼트(6632) 및 제3 프리즘 엘리먼트(6633)를 포함할 수 있다.
또한, 상기 스티어링 컴포넌트(6630)는 적어도 하나 이상의 프리즘 엘리먼트를 포함하는 프리즘 유닛을 포함할 수 있다. 예를 들어, 상기 스티어링 컴포넌트(6630)는 상기 제1 프리즘 엘리먼트(6631)를 포함하는 제1 프리즘 유닛, 상기 제2 프리즘 엘리먼트(6632)를 포함하는 제2 프리즘 유닛 및 상기 제3 프리즘 엘리먼트(6633)를 포함하는 제3 프리즘 유닛을 포함할 수 있다.
또한, 도 136의 (a)를 참조하면, 상기 콜리메이션 컴포넌트(6620)는 상기 VCSEL array(6610)로부터 출력된 레이저를 콜리메이션 할 수 있다. 다만, 이에 대하여 상술한 내용이 적용될 수 있으므로 중복되는 서술은 생략하기로 한다.
또한, 도 136의 (a)를 참조하면, 상기 스티어링 컴포넌트(6630)는 상기 VCSEL array(6610)로부터 출력되어 상기 콜리메이션 컴포넌트(6620)를 통해 콜리메이션 된 레이저를 스티어링 할 수 있다. 다만, 이에 대하여 상술한 내용이 적용될 수 있으므로 중복되는 서술은 생략하기로 한다.
또한, 도 136의 (a)를 참조하면, 상기 스티어링 컴포넌트(6530)는 상기 VCSEL array(6610)에 포함되는 VCSEL emitter로부터 출력된 레이저를 스티어링 할 수 있다. 에를 들어, 상기 스티어링 컴포넌트(6630)에 포함되는 상기 제1 프리즘 엘리먼트(6631)는 상기 제1 VCSEL emitter로부터 출력된 레이저를 스티어링 할 수 있으나, 이에 한정되지 않는다.
또한, 도 136의 (a)를 참조하면, 상기 스티어링 컴포넌트(6630)는 상기 VCSEL array(6610)에 포함되는 VCSEL unit으로부터 출력된 레이저를 스티어링 할 수 있다. 예를 들어, 상기 스티어링 컴포넌트(6630)에 포함되는 상기 제1 프리즘 엘리먼트(6631)를 포함하는 상기 제1 프리즘 유닛은 상기 제1 VCSEL emitter(6611)를 포함하는 상기 제1 VCSEL unit으로부터 출력된 레이저를 스티어링 할 수 있으나, 이에 한정되지 않는다.
또한, 도 136의 (a)를 참조하면, 상기 스티어링 컴포넌트(6630)는 상기 VCSEL array(6610)에 포함되는 VCSEL unit으로부터 출력된 적어도 하나의 레이저를 포함하는 레이저 그룹을 동일한 각도로 스티어링 할 수 있다. 예를 들어, 상기 스티어링 컴포넌트(6630)에 포함되는 상기 제1 프리즘 엘리먼트(6631)를 포함하는 상기 제1 프리즘 유닛은 상기 제1 VCSEL emitter(6611)를 포함하는 상기 제1 VCSEL unit으로부터 출력된 제1 레이저 그룹(6641)을 제1 각도로 스티어링 할 수 있으나, 이에 한정되지 않는다.
또한, 도 136의 (a)를 참조하면, 상기 스티어링 컴포넌트(6630)는 상기 VCSEL array(6610)에 포함되는 적어도 둘 이상의 VCSEL unit으로부터 출력된 적어도 둘 이상의 레이저 그룹을 서로 다른 각도로 스티어링 할 수 있다. 예를 들어, 상기 제1 프리즘 엘리먼트(6631)를 포함하는 상기 제1 프리즘 유닛은 상기 제1 VCSEL emitter(6611)를 포함하는 상기 제1 VCSEL unit으로부터 출력된 상기 제1 레이저 그룹(6641)을 상기 제1 각도로 스티어링 하며, 상기 제2 프리즘 엘리먼트(6632)를 포함하는 상기 제2 프리즘 유닛은 상기 제2 VCSEL emitter(6612)를 포함하는 상기 제2 VCSEL unit으로부터 출력된 제2 레이저 그룹(6642)을 제2 각도로 스티어링 하고, 상기 제3 프리즘 엘리먼트(6633)를 포함하는 상기 제3 프리즘 유닛은 상기 제3 VCSEL emitter(6613)를 포함하는 상기 제3 VCSEL unit으로부터 출력된 제3 레이저 그룹(6643)을 제3 각도로 스티어링 할 수 있으나, 이에 한정되지 않는다.
또한, 상기 VCSEL array(6610)와 상기 콜리메이션 컴포넌트(6620)의 배치 관계에 대하여 상술한 내용이 적용될 수 있으므로, 중복되는 서술은 생략하기로 한다.
한편, 상기 스티어링 컴포넌트(6630)의 스티어링 효율을 증가시키기 위하여 상기 VCSEL array(6610), 상기 콜리메이션 컴포넌트(6620) 및 상기 스티어링 컴포넌트(6630)는 소정의 관계를 가지도록 배치될 수 있다.
따라서, 이하에서는 상기 VCSEL array(6610), 상기 콜리메이션 컴포넌트(6620) 및 상기 스티어링 컴포넌트(6630)의 배치 관게에 대하여 보다 상세하게 기술하기로 한다.
도 136의 (b)를 참조하면, 상기 VCSEL array(6610)에 포함되는 상기 제1 VCSEL emitter(6611)는 제1 직경(6650)을 가지도록 형성될 수 있으며, 이 때, 상기 제1 직경(6650)은 상기 제1 VCSEL emitter(6611)의 크기를 의미하는 것으로, 한 변의 길이, 직경 등 상기 제1 VCSEL unit의 크기를 1차원으로 표현하기 위한 것일 수 있다.
또한, 상기 도 136의 (b)를 참조하면, 상기 콜리메이션 컴포넌트(6620)에 포함되는 상기 제1 마이크로 렌즈 엘리먼트(6621)는 제2 직경(6660)을 가지도록 형성될 수 있으며, 이 때, 상기 제2 직경(6660)은 상기 제1 마이크로 렌즈 엘리먼트(6621)의 크기를 의미하는 것으로, 한 변의 길이, 직경 등 상기 제1 마이크로 렌즈 엘리먼트(6621)의 크기를 1차원으로 표현하기 위한 것일 수 있다.
또한, 도 136의 (b)를 참조하면, 상기 스티어링 컴포넌트(6630)에 포함되는 상기 제1 프리즘 엘리먼트(6631)는 제3 직경(6670)을 가지도록 형성될 수 있으며, 이 때, 상기 제3 직경(6670)은 상기 제1 프리즘 엘리먼트(6631)의 크기를 의미하는 것으로, 한 변의 길이, 직경 등 상기 제1 프리즘 엘리먼트(6631)의 크기를 1차원으로 표현하기 위한 것일 수 있다.
또한, 도 136의 (b)를 참조하면, 상기 제1 프리즘 엘리먼트(6631)는 상기 제1 VCSEL emitter(6611)로부터 출력된 레이저를 스티어링 시키기위하여 상기 제1 VCSEL emitter(6611)에 대응되도록 배치될 수 있다.
또한, 도 136의 (b)를 참조하면, 스티어링 효율을 증가시키기 위하여 상기 제1 프리즘 엘리먼트(6631)의 상기 제3 직경(6670)은 상기 제1 VCSEL emitter(6611)의 상기 제1 직경(6650)보다 클 수 있다. 예를 들어, 상기 제1 VCSEL emitter(6611)의 상기 제1 직경(6650)은 14um이며, 상기 제1 프리즘 엘리먼트(6631)의 상기 제3 직경(6670)은 140um일 수 있으나, 이에 한정되지 않는다.
또한, 도 136의 (b)를 참조하면, 상기 제1 프리즘 엘리먼트(6631)는 상기 제1 VCSEL emitter(6611)로부터 출력되어 상기 제1 마이크로 렌즈 엘리먼트(6621)를 통해 콜리메이션 되는 레이저를 스티어링 시키기 위하여 상기 제1 마이크로 렌즈 엘리먼트(6621)에 대응되도록 배치될 수 있다.
또한, 도 136의 (b)를 참조하면, 스티어링 효율을 증가시키기 위하여 상기 제1 프리즘 엘리먼트(6631)의 상기 제3 직경(6670)은 상기 제1 마이크로 렌즈 엘리먼트(6621)의 상기 제2 직경(6660)보다 크거나 같을 수 있다. 예를 들어, 상기 제1 마이크로 렌즈 엘리먼트(6621)의 상기 제2 직경(6660)은 140um 이며, 상기 제1 프리즘 엘리먼트(6631)의 상기 제3 직경(6670)은 141um 일 수 있으나, 이에 한정되지 않는다.
도 137은 일 실시예에 따른 레이저 출력부에 대하여 설명하기 위한 도면이다.
도 137을 참조하면, 일 실시예에 따른 레이저 출력부(6700)은 VCSEL array(6730)를 포함할 수 있다.
이 때, 상기 VCSEL array(6730)는 적어도 하나 이상의 VCSEL emitter를 포함할 수 있으며, 예를 들어, 상기 VCSEL array(6730)는 제1 VCSEL emitter(6711) 및 제2 VCSEL emitter(6712)를 포함할 수 있으나, 이에 한정되지 않는다.
또한, 상기 VCSEL array(6730)는 적어도 하나 이상의 VCSEL emitter를 포함하는 VCSEL unit을 포함할 수 있다. 예를 들어, 상기 VCSEL array(6730)은 상기 제1 VCSEL emitter(6711)를 포함하는 제1 VCSEL unit(6721) 및 상기 제2 VCSEL emitter(6712)를 포함하는 제2 VCSEL unit(6722)을 포함할 수 있으나, 이에 한정되지 않는다.
또한, 상기 VCSEL array(6730)에 포함되는 적어도 하나 이상의 VCSEL emitter는 독립적으로 동작하여, 독립적으로 레이저를 출력할 수 있다. 예를 들어, 상기 VCSEL array(6730)에 포함되는 상기 제1 VCSEL emitter(6711) 및 상기 제2 VCSEL emitter(6712)는 서로 독립적으로 동작하여 독립적으로 레이저를 출력할 수 있으나, 이에 한정되지 않는다.
또한, 상기 VCSEL array(6730)에 포함되는 적어도 하나 이상의 VCSEL unit은 독립적으로 동작하여, 독립적으로 레이저를 출력할 수 있다. 예를 들어, 상기 VCSEL array(6730)에 포함되는 상기 제1 VCSEL unit(6721) 및 상기 제2 VCSEL unit(6722)는 서로 독립적으로 동작하여 독립적으로 레이저를 출력할 수 있으나, 이에 한정되지 않는다.
또한, VCSEL unit에 포함되는 개별 VCSEL emitter 들은 서로 연결되어 동작하여, 동시에 레이저를 출력할 수 있다. 예를 들어, 상기 제1 VCSEL unit(6721)에 포함되는 상기 제1 VCSEL emitter(6711) 및 상기 제1 VCSEL emitter(6711)를 제외한 적어도 하나의 VCSEL emitter들은 서로 연결되어 동작하며, 동시에 레이저를 출력할 수 있으나, 이에 한정되지 않는다.
또한, VCSEL unit에 포함되는 개별 VCSEL emitter로부터 출력된 레이저는 레이저 그룹을 형성할 수 있다. 예를 들어, 상기 제1 VCSEL unit(6721)에 포함되는 상기 제1 VCSEL emitter(6711) 및 상기 제1 VCSEL emitter(6711)를 제외한 적어도 하나의 VCSEL emitter로부터 출력된 레이저는 제1 레이저 그룹을 형성할 수 있으며, 상기 제2 VCSEL unit(6721)에 포함되는 상기 제2 VCSEL emitter(6712) 및 상기 제2 VCSEL emitter(6712)를 제외한 적어도 하나의 VCSEL emitter로부터 출력된 레이저는 제2 레이저 그룹을 형성할 수 있으나, 이에 한정되지 않는다.
또한, 상기 레이저 출력부(6700)의 출력효율, 콜리메이션 효율 및 스티어링 효율을 증가시키기 위하여, 상기 VCSEL array(6730)에 포함되는 VCSEL unit 사이의 간격은 VCSEL unit에 포함되는 VCSEL emitter들 사이의 간격 보다 클 수 있다. 예를 들어, 상기 제1 VCSEL unit(6721)과 상기 제2 VCSEL unit(6722) 사이의 간격은 상기 제1 VCSEL unit(6721)에 포함되는 인접한 VCSEL emitter들 사이의 간격 보다 클 수 있으나, 이에 한정되지 않는다.
또한, 상술한 바와 같이 VCSEL unit 사이의 간격이 인접한 VCSEL emitter 사이의 간격 보다 큰 경우 상기 VCSEL array(6730), 콜리메이션 컴포넌트 및 스티어링 컴포넌트가 소정의 배치 관계를 가질 수 있으며, 이하에서는 이에 대해 상세히 기술하기로 한다.
도 138은 일 실시예에 따른 레이저 출력부의 구성에 대하여 설명하기 위한 도면이다.
도 138을 참조하면, 일 실시예에 따른 레이저 출력부(6800)는 VCSEL array(6810) 및 콜리메이션 컴포넌트(6820)를 포함할 수 있으나, 이에 한정되지 않는다.
이 때, 상기 VCSEL array(6810)는 적어도 하나 이상의 VCSEL emitter를 포함할 수 있다. 예를 들어, 상기 VCSEL array(6810)는 제1 VCSEL emitter(6811), 제2 VCSEL emitter(6812) 및 제3 VCSEL emitter(6813)를 포함할 수 있다.
또한, 상기 VCSEL array(6810)는 적어도 하나 이상의 VCSEL emitter를 포함하는 VCSEL unit을 포함할 수 있다. 예를 들어, 상기 VCSEL array(6810)는 상기 제1 VCSEL emitter(6811) 및 상기 제2 VCSEL emitter(6812)를 포함하는 제1 VCSEL unit 및 상기 제3 VCSEL emitter(6813)를 포함하는 제2 VCSEL unit을 포함할 수 있다.
또한, 상기 콜리메이션 컴포넌트(6820)는 마이크로 렌즈 어레이(Micro lens array)를 포함할 수 있으며, 상기 마이크로 렌즈 어레이는 적어도 하나 이상의 마이크로 렌즈 엘리먼트를 포함할 수 있다. 예를 들어, 상기 콜리메이션 컴포넌트(6820)는 제1 마이크로 렌즈 엘리먼트(6821), 제2 마이크로 렌즈 엘리먼트(6822) 및 제3 마이크로 렌즈 엘리먼트(6823)를 포함할 수 있다.
또한, 상기 콜리메이션 컴포넌트(6820)는 적어도 하나 이상의 마이크로 렌즈 엘리먼트를 포함하는 마이크로 렌즈 유닛을 포함할 수 있다. 예를 들어, 상기 콜리메이션 컴포넌트(6820)는 상기 제1 마이크로 렌즈 엘리먼트(6821) 및 상기 제2 마이크로 렌즈 엘리먼트(6822)를 포함하는 제1 마이크로 렌즈 유닛 및 제3 마이크로 렌즈 엘리먼트(6823)를 포함하는 제2 마이크로 렌즈 유닛을 포함할 수 있다.
또한, 도 138를 참조하면, 상기 제1 VCSEL emitter(6811)와 상기 제2 VCSEL emitter(6812)는 제1 간격(6830)을 가지도록 배치될 수 있으며, 이 때, 상기 제1 간격(6830)은 상기 제1 VCSEL emitter(6811)와 상기 제2 VCSEL emitter(6812) 사이의 거리를 1차원으로 표현하기 위한 것일 수 있다.
또한, 도 138를 참조하면, 상기 제1 VCSEL unit은 제1 직경(6840)을 가지도록 형성될 수 있으며, 이 때, 상기 제1 직경(6840)은 상기 제1 VCSEL unit의 크기를 의미하는 것으로, 한 변의 길이, 직경 등 상기 제1 VCSEL unit의 크기를 1차원으로 표현하기 위한 것일 수 있다
또한, 도 138를 참조하면, 상기 제1 VCSEL unit과 상기 제2 VCSEL unit은 제2 간격(6850)을 가지도록 배치될 수 있으며, 이 때, 상기 제2 간격(6850)은 상기 제1 VCSEL unit과 상기 제2 VCSEL unit 사이의 거리를 1차원으로 표현하기 위한 것일 수 있다
또한, 도 138를 참조하면, 상기 제1 마이크로 렌즈 유닛은 제2 직경(6860)을 가지도록 형성될 수 있으며, 이 때, 상기 제2 직경(6860)은 상기 제1 마이크로 렌즈 유닛의 크기를 의미하는 것으로, 한 변의 길이, 직경 등 상기 제1 마이크로 렌즈 유닛의 크기를 1차원으로 표현하기 위한 것일 수 있다.
또한, 도 138를 참조하면, 상기 제1 마이크로 렌즈 유닛과 상기 제2 마이크로 렌즈 유닛은 제3 간격(6870)을 가지도록 배치될 수 있으며, 이 때, 상기 제3 간격(6870)은 상기 제1 마이크로 렌즈 유닛과 상기 제2 마이크로 렌즈 유닛 사이의 거리를 1차원으로 표현하기 위한 것일 수 있다.
또한, 도 138를 참조하면, 서로 다른 VCSEL unit으로부터 출력되는 레이저 간의 간섭을 저감시키기 위하여 상기 제2 간격(6850)은 상기 제1 간격(6830)보다 크거나 같을 수 있다.
또한, 도 138를 참조하면, 콜리메이션 효율을 증가시키기 위하여, 상기 제2 간격(6850)은 상기 제3 간격(6870)보다 크거나 같을 수 있다.
또한, 도 138를 참조하면, 서로 다른 VCSEL unit으로부터 출력되는 레이저의 콜리메이션 효율을 증가시키기 위하여 상기 제3 간격(6870)은 상기 제1 간격(6830)보다 크거나 같을 수 있다.
또한, 도 138를 참조하면, 상기 레이저 출력부(6800)의 사이즈를 감소시키기 위하여 상기 제2 간격(6850)은 상기 제1 직경(6840)보다 작거나 같을 수 있다.
또한, 도 138를 참조하면, 상기 레이저 출력부(6800)의 사이즈를 감소시키기 위하여 상기 제3 간격(6870)은 상기 제2 직경(6860)보다 작거나 같을 수 있다.
도 139는 일 실시예에 따른 레이저 출력부의 구성에 대하여 설명하기 위한 도면이다.
도 139를 참조하면, 일 실시예에 따른 레이저 출력부(6900)는 VCSEL array(6910), 콜리메이션 컴포넌트(6920) 및 스티어링 컴포넌트(6930)를 포함할 수 있으나, 이에 한정되지 않는다.
이 때, 상기 VCSEL array(6910)는 제1 VCSEL emitter(6911), 제2 VCSEL emitter(6912) 및 제3 VCSEL emitter(6913)를 포함할 수 있고, 상기 제1 및 제2 VCSEL emitter(6911,6912)를 포함하는 제1 VCSEL unit, 상기 제3 VCSEL emitter(6913)를 포함하는 제2 VCSEL unit을 포함할 수 있으며, 이에 대하여 상술한 내용이 적용될 수 있으므로, 중복되는 서술은 생략하기로 한다.
또한, 상기 콜리메이션 컴포넌트(6920)는 제1 마이크로 렌즈 엘리먼트(6921), 제2 마이크로 렌즈 엘리먼트(6922) 및 제3 마이크로 렌즈 엘리먼트(6923)를 포함할 수 있고, 상기 제1 및 제2 마이크로 렌즈 엘리먼트(6921,6922)를 포함하는 제1 마이크로 렌즈 유닛, 상기 제3 마이크로 렌즈 엘리먼트(6923)를 포함하는 제2 마이크로 렌즈 유닛을 포함할 수 있으며, 이에 대하여 상술한 내용이 적용될 수 있으므로, 중복되는 서술은 생략하기로 한다.
또한, 상기 스티어링 컴포넌트(6930)는 프리즘 어레이(Prism array)를 포함할 수 있으며, 상기 프리즘 어레이는 적어도 하나 이상의 프리즘 엘리먼트를 포함할 수 있다. 예를 들어, 상기 스티어링 컴포넌트(6930)는 제1 프리즘 엘리먼트(6931) 및 제2 프리즘 엘리먼트(6932)를 포함할 수 있다.
또한, 상기 제1 VCSEL emitter(6911)와 상기 제2 VCSEL emitter(6912) 사이의 간격인 제1 간격(6930), 상기 제1 VCSEL unit의 직경인 제1 직경(6940), 상기 제1 VCSEL unit과 상기 제2 VCSEL unit 사이의 간격인 제2 간격(6950), 상기 제1 마이크로 렌즈 유닛의 직경인 제2 직경(6960), 상기 제1 및 제2 마이크로 렌즈 유닛 사이의 간격인 제3 간격(6970)에 대하여는 상술한 내용이 적용될 수 있으므로, 중복되는 서술은 생략하기로 한다.
한편, 상기 제1 프리즘 엘리먼트(6931)는 제3 직경(6980)을 가지도록 형성될 수 있으며, 이 때, 상기 제3 직경(6980)은 상기 제1 프리즘 엘리먼트(6931)의 크기를 의미하는 것으로, 한 변의 길이, 직경 등 상기 제1 프리즘 엘리먼트(6931)의 크기를 1차원으로 표현하기 위한 것일 수 있다.
또한, 상기 제1 프리즘 엘리먼트(6931)와 상기 제2 프리즘 엘리먼트(6932)는 제4 간격(6990)을 가지도록 배치될 수 있으며, 이 때, 상기 제4 간격(6990)은 상기 제1 프리즘 엘리먼트(6931)와 상기 제2 프리즘 엘리먼트(6932) 사이의 거리를 1차원으로 표현하기 위한 것일 수 있다.
또한, 도 139를 참조하면, 스티어링 효율을 증가시키기 위하여, 상기 제2 간격(6950)은 상기 제4 간격(6990)보다 크거가 같을 수 있다.
또한, 도 139를 참조하면, 콜리메이션 된 레이저의 스티어링 효율을 증가시키기 위하여 상기 제3 간격(6970)은 상기 제4 간격(6990)보다 크거나 같을 수 있다.
또한, 도 139를 참조하면, 상기 레이저 출력부(6900)의 사이즈를 감소시키기 위하여, 상기 제4 간격(6990)은 상기 제1 직경(6940)보다 작거나 같을 수 있다.
또한, 도 139를 참조하면, 상기 레이저 출력부(6900)의 사이즈를 감소시키기 위하여, 상기 제4 간격(6990)은 상기 제2 직경(6960)보다 작거나 같을 수 있다.
또한, 도 139를 참조하면, 상기 레이저 출력부(6900)의 사이즈를 감소시키기 위하여, 상기 제4 간격(6990)은 상기 제3 직경(6980)보다 작거나 같을 수 있다.
또한, 도 139를 참조하면, 콜리메이션 및 스티어링 효율을 증가시키기 위하여 상기 제1 직경(6940)은 상기 제2 직경(6960)보다 작거나 같을 수 있으며, 상기 제2 직경(6960)은 상기 제3 직경(6980)보다 작거나 같을 수 있다.
또한, 도 139를 참조하면, 각각의 프리즘 엘리먼트 사이의 거리는 서로 상이할 수 있으나, 이에 한정되지 않는다.
도 140은 일 실시예에 따른 스티어링 컴포넌트를 설명하기 위한 도면이다.
도 140을 참조하면, 일 실시예에 따른 스티어링 컴포넌트(7000)는 프리즘을 포함할 수 있다.
또한, 상기 프리즘은 제1 각도( )를 가지고 형성될 수 있으나, 이에 한정되지 않는다.
)를 가지고 형성될 수 있으나, 이에 한정되지 않는다.
또한, 상기 프리즘은 레이저(7001)를 획득할 수 있으며, 획득된 레이저(7001)를 일정 각도로 스티어링 할 수 있다.
또한, 상기 프리즘에서 획득되는 상기 레이저(7001)은 상기 프리즘의 일면에 제2 각도( )로 입사될 수 있다.
)로 입사될 수 있다.
이 때, 상기 제2 각도( )는 상기 제1 각도(
)는 상기 제1 각도( )와 동일 할 수 있다.
)와 동일 할 수 있다.
또한, 상기 레이저(7001)은 상기 프리즘의 일면에 대한 법선으로부터 제3 각도( )로 스티어링 될 수 있다.
)로 스티어링 될 수 있다.
이 때, 상기 제3 각도( )는 굴절의 법칙에 의해 결정될 수 있다.
)는 굴절의 법칙에 의해 결정될 수 있다.
보다 구체적으로, 상기 프리즘의 굴절률을 n2, 공기의 굴절률을 n3라고 하는 경우, 상기 제3 각도( )는 아래의 수학식 1에 의해 결정될 수 있다.
)는 아래의 수학식 1에 의해 결정될 수 있다.
수학식 1

또한, 상기 스티어링되는 레이저가 외부로 조사될 수 있도록 상기 제1 각도( )는 아래의 수학식 2를 만족할 수 있다.
)는 아래의 수학식 2를 만족할 수 있다.
수학식 2

도 141은 일 실시예에 따른 스티어링 컴포넌트를 설명하기 위한 도면이다.
도 141을 참조하면, 일 실시예에 따른 스티어링 컴포넌트(7010)는 프리즘을 포함할 수 있다.
또한, 상기 프리즘은 제1 각도( )를 가지고 형성될 수 있으나, 이에 한정되지 않는다.
)를 가지고 형성될 수 있으나, 이에 한정되지 않는다.
또한, 상기 프리즘은 레이저(7011)를 획득할 수 있으며, 획득된 레이저(7011)를 일정 각도로 스티어링 할 수 있다.
또한, 상기 레이저(7011)는 일정 다이버전스 각도( )를 가질 수 있으나, 이에 한정되지 않는다.
)를 가질 수 있으나, 이에 한정되지 않는다.
또한, 상기 프리즘에서 획득되는 상기 레이저(7011)는 상기 프리즘의 일면에 제2 각도로 입사될 수 있으며, 상기 레이저(7011)의 상기 다이버전스 각도( )에 의해 상기 레이저(7011)의 적어도 일부는 제3 각도(
)에 의해 상기 레이저(7011)의 적어도 일부는 제3 각도( )로 상기 프리즘의 일면에 입사될 수 있으며, 상기 레이저(7011)의 적어도 다른 일부는 제4 각도(
)로 상기 프리즘의 일면에 입사될 수 있으며, 상기 레이저(7011)의 적어도 다른 일부는 제4 각도( )로 상기 프리즘의 일면에 입사될 수 있으나, 이에 한정되지 않는다.
)로 상기 프리즘의 일면에 입사될 수 있으나, 이에 한정되지 않는다.
이 때, 상기 제3 각도( )는
)는 가 될 수 있다.
가 될 수 있다.
또한, 상기 제4 각도( )는
)는  가 될 수 있다.
가 될 수 있다.
또한, 상기 레이저(7011)의 적어도 일부는 상기 프리즘의 일면에 대한 법선으로부터 제5 각도( )로 스티어링 될 수 있다.
)로 스티어링 될 수 있다.
이 때, 상기 제5 각도( )는 굴절의 법칙에 의해 결정될 수 있다.
)는 굴절의 법칙에 의해 결정될 수 있다.
보다 구체적으로, 상기 프리즘의 굴절률을 n2, 공기의 굴절률을 n3이라고 하는 경우, 상기 제5 각도( )는 아래의 수학식 3에 의해 결정될 수 있다.
)는 아래의 수학식 3에 의해 결정될 수 있다.
수학식 3

또한, 상기 스티어링되는 레이저가 외부로 조사되며, 빔 프로파일의 변화를 감소시키도록 상기 제1 각도( )는 아래의 수학식 4를 만족할 수 있다.
)는 아래의 수학식 4를 만족할 수 있다.
수학식 4

도 142는 일 실시예에 따른 스티어링 컴포넌트를 설명하기 위한 도면이다.
도 142를 참조하면, 일 실시예에 따른 스티어링 컴포넌트(7020)는 프리즘을 포함할 수 있다.
이 때, 상기 프리즘은 레이저(7021)를 획득할 수 있으며, 획득된 레이저(7021)를 일정 각도로 스티어링 할 수 있다.
또한, 상기 레이저(7021)가 계면을 통과하는 경우 상기 레이저(7021)의 적어도 일부는 반사될 수 있다.
예를 들어, 상기 레이저(7021)의 S 편광 부분은 수학식 5에 따라 반사정도가 결정될 수 있으며, 상기 레이저(7021)의 P 편광 부분은 수학식 6에 따라 반사 정도가 결정될 수 있다.
수학식 5

수학식 6

이 때,  는 입사각을 의미할 수 있으며, 레이저가 굴절률이 n1인 매질로부터 굴절률이 n2인 매질로 진행하는 경우, n은 n2/n1을 의미할 수 있다.
는 입사각을 의미할 수 있으며, 레이저가 굴절률이 n1인 매질로부터 굴절률이 n2인 매질로 진행하는 경우, n은 n2/n1을 의미할 수 있다.
또한, 도 142에 도시된 바와 같이, 프리즘을 통해 스티어링 되는 상기 레이저(7021)은 적어도 두번의 계면을 통과할 수 있다.
제1 계면은 공기로부터 프리즘으로 입사되는 계면을 의미할 수 있으며, 프리즘에 입사되는 각도가 제1 각도( )이고 프리즘의 굴절률이 n1인 경우 상기 제1 계면에서의 반사 정도는 수학식 7 및 수학식 8에 의해 결정될 수 있다.
)이고 프리즘의 굴절률이 n1인 경우 상기 제1 계면에서의 반사 정도는 수학식 7 및 수학식 8에 의해 결정될 수 있다.
수학식 7

수학식 8

또한, 제2 계면은 프리즘으로부터 공기로 입사되는 계면을 의미할 수 있으며, 공기에 입사되는 각도가 제2 각도( )이고, 프리즘의 굴절률이 n1인 경우, 상기 제2 계면에서의 반사 정도는 수학식 9 및 수학식 10에 의해 결정될 수 있다.
)이고, 프리즘의 굴절률이 n1인 경우, 상기 제2 계면에서의 반사 정도는 수학식 9 및 수학식 10에 의해 결정될 수 있다.
수학식 9

수학식 10

또한, 상기 레이저(7021)의 스티어링 각도를 의미하는 제3 각도( )는 상기 프리즘의 굴절률을 n1이라 하는 경우 수학식 11에 의해 결정될 수 있다.
)는 상기 프리즘의 굴절률을 n1이라 하는 경우 수학식 11에 의해 결정될 수 있다.
수학식 11
따라서, 상술한 내용들을 종합하면 상기 제3 각도( )와 반사율 사이의 관계를 도출해 낼 수 있다.
)와 반사율 사이의 관계를 도출해 낼 수 있다.
도 142의 (b)는 상기 제3 각도( )와 반사율 사이의 관계를 그래프로 나타낸 도면이다.
)와 반사율 사이의 관계를 그래프로 나타낸 도면이다.
도 142의 (b)를 참조하면, 일 실시예에 따른 프리즘은 상기 제3 각도( )가 15도 이하인 경우 반사율이 5% 미만일 수 있으나, 이에 한정되지 않는다.
)가 15도 이하인 경우 반사율이 5% 미만일 수 있으나, 이에 한정되지 않는다.
따라서, 스티어링 효율을 증가시키고 반사율이 최소화되는 조건에서 레이저를 조사하기 위하여 상기 제3 각도( )는 반사율이 5% 미만이 되는 15도 이하가 될 수 있으며, 반사율이 10% 미만이 되는 25도 이하가 될 수 있으나, 이에 한정되지 않는다.
)는 반사율이 5% 미만이 되는 15도 이하가 될 수 있으며, 반사율이 10% 미만이 되는 25도 이하가 될 수 있으나, 이에 한정되지 않는다.
도 143은 일 실시예에 따른 레이저 출력부의 구성에 대하여 설명하기 위한 도면이다.
도 143을 참조하면, 일 실시예에 따른 레이저 출력부(7100)는 VCSEL array(7110), 콜리메이션 컴포넌트(7120) 및 스티어링 컴포넌트(7130)를 포함할 수 있으나, 이에 한정되지 않는다.
이 때, 상기 VCSEL array(7110)는 적어도 하나 이상의 VCSEL emitter를 포함할 수 있으며, 예를 들어, 상기 VCSEL array(7110)는 제1 VCSEL emitter(7111), 제2 VCSEL emitter(7112) 및 제3 VCSEL emitter(7113)를 포함할 수 있다.
또한, 상기 VCSEL array(7110)는 적어도 하나 이상의 VCSEL emitter를 포함하는 VCSEL unit 을 포함할 수 있다. 예를 들어, 상기 VCSEL array(7110)는 제1 VCSEL emitter(7111)를 포함하는 제1 VCSEL unit, 제2 VCSEL emitter(7112)를 포함하는 제2 VCSEL unit 및 제3 VCSEL emitter(7113)를 포함하는 제3 VCSEL unit을 포함할 수 있다.
또한, 상기 콜리메이션 컴포넌트(7120)는 마이크로 렌즈 어레이(Micro lens array)를 포함할 수 있으며, 상기 마이크로 렌즈 어레이는 적어도 하나 이상의 마이크로 렌즈 엘리먼트를 포함할 수 있다. 예를 들어, 상기 콜리메이션 컴포넌트(7120)는 제1 마이크로 렌즈 엘리먼트(7121), 제2 마이크로 렌즈 엘리먼트(7122) 및 제3 마이크로 렌즈 엘리먼트(7123)를 포함할 수 있다.
또한, 상기 콜리메이션 컴포넌트(7120)는 적어도 하나 이상의 마이크로 렌즈 엘리먼트를 포함하는 마이크로 렌즈 유닛을 포함할 수 있다. 예를 들어, 상기 콜리메이션 컴포넌트(7120)는 상기 제1 마이크로 렌즈 엘리먼트(7121)를 포함하는 제1 마이크로 렌즈 유닛, 상기 제2 마이크로 렌즈 엘리먼트(7122)를 포함하는 제2 마이크로 렌즈 유닛 및 상기 제3 마이크로 렌즈 엘리먼트(7123)를 포함하는 제3 마이크로 렌즈 유닛을 포함할 수 있다.
또한, 상기 스티어링 컴포넌트(7130)는 프리즘 어레이(Prism array)를 포함할 수 있으며, 상기 프리즘 어레이는 적어도 하나 이상의 프리즘 엘리먼트를 포함할 수 있다. 예를 들어, 상기 스티어링 컴포넌트(7130)는 제1 프리즘 엘리먼트(7131), 제2 프리즘 엘리먼트(7132) 및 제3 프리즘 엘리먼트(7133)를 포함할 수 있다.
또한, 상기 콜리메이션 컴포넌트(7120)는 상기 VCSEL array(7110)로부터 출력된 레이저를 콜리메이션 할 수 있다. 다만, 이에 대하여 상술한 내용이 적용될 수 있으므로 중복되는 서술은 생략하기로 한다.
또한, 상기 스티어링 컴포넌트(7130)는 상기 VCSEL array(7110)로부터 출력되어 상기 콜리메이션 컴포넌트(7120)를 통해 콜리메이션 된 레이저를 스티어링 할 수 있다. 다만, 이에 대하여 상술한 내용이 적용될 수 있으므로 중복되는 서술은 생략하기로 한다.
또한, 상기 VCSEL array(7110)에 포함되는 각각의 VCSEL emitter는 독립적으로 제어되기 위하여 독립적인 전기적 컨택과 연결될 수 있다. 예를 들어, 상기 제1 VCSEL emitter(7111)는 제1 컨택(7141) 및 제2 컨택(7151)과 연결될 수 있으며, 상기 제2 VCSEL emitter(7112)는 제3 컨택(7142) 및 제4 컨택(7152)과 연결될 수 있고, 상기 제3 VCSEL emitter(7113)는 제5 컨택(7143) 및 제6 컨택(7153)과 연결될 수 있으나, 이에 한정되지 않는다.
또한, 상기 제1, 제3 및 제5 컨택(7141,7142,7143)는 P-컨택을 의미할 수 있으며, 상기 제2, 제4 및 제6 컨택(7151,7152,7153)는 N-컨택을 의미할 수 있으나, 이에 한정되지 않는다.
또한, 상기 VCSEL array(7110)에 포함되는 각각의 VCSEL emitter는 서로 다른 시간에 동작할 수 있다. 예를 들어, 제1 시점에 상기 제1 컨택(7141) 및 상기 제2 컨택(7151)을 통해 상기 제1 VCSEL emitter(7111)가 동작되어 제1 레이저를 출력할 수 있으며, 제2 시점에 상기 제3 컨택(7142) 및 상기 제4 컨택(7152)을 통해 상기 제2 VCSEL emitter(7112)가 동작되어 제2 레이저를 출력할 수 있고, 제3 시점에 상기 제5 컨택(7143) 및 상기 제6 컨택(7153)을 통해 상기 제3 VCSEL emitter(7113)가 동작되어 제3 레이저를 출력할 수 있으나, 이에 한정되지 않는다.
도 144는 일 실시예에 따른 레이저 출력부의 구성에 대하여 설명하기 위한 도면이다.
도 144를 참조하면, 일 실시예에 따른 레이저 출력부(7200)는 VCSEL array(7210), 콜리메이션 컴포넌트(7220) 및 스티어링 컴포넌트(7230)를 포함할 수 있으나, 이에 한정되지 않는다.
이 때, 상기 VCSEL array(7210)는 적어도 하나 이상의 VCSEL emitter를 포함할 수 있으며, 예를 들어, 상기 VCSEL array(7210)는 제1 VCSEL emitter(7211), 제2 VCSEL emitter(7212) 및 제3 VCSEL emitter(7213)를 포함할 수 있다.
또한, 상기 VCSEL array(7210)는 적어도 하나 이상의 VCSEL emitter를 포함하는 VCSEL unit 을 포함할 수 있다. 예를 들어, 상기 VCSEL array(7210)는 제1 VCSEL emitter(7211)를 포함하는 제1 VCSEL unit, 제2 VCSEL emitter(7212)를 포함하는 제2 VCSEL unit 및 제3 VCSEL emitter(7213)를 포함하는 제3 VCSEL unit을 포함할 수 있다.
또한, 상기 콜리메이션 컴포넌트(7220)는 마이크로 렌즈 어레이(Micro lens array)를 포함할 수 있으며, 상기 마이크로 렌즈 어레이는 적어도 하나 이상의 마이크로 렌즈 엘리먼트를 포함할 수 있다. 예를 들어, 상기 콜리메이션 컴포넌트(7220)는 제1 마이크로 렌즈 엘리먼트(7221), 제2 마이크로 렌즈 엘리먼트(7222) 및 제3 마이크로 렌즈 엘리먼트(7223)를 포함할 수 있다.
또한, 상기 콜리메이션 컴포넌트(7220)는 적어도 하나 이상의 마이크로 렌즈 엘리먼트를 포함하는 마이크로 렌즈 유닛을 포함할 수 있다. 예를 들어, 상기 콜리메이션 컴포넌트(7220)는 상기 제1 마이크로 렌즈 엘리먼트(7221)를 포함하는 제1 마이크로 렌즈 유닛, 상기 제2 마이크로 렌즈 엘리먼트(7222)를 포함하는 제2 마이크로 렌즈 유닛 및 상기 제3 마이크로 렌즈 엘리먼트(7223)를 포함하는 제3 마이크로 렌즈 유닛을 포함할 수 있다.
또한, 상기 스티어링 컴포넌트(7230)는 프리즘 어레이(Prism array)를 포함할 수 있으며, 상기 프리즘 어레이는 적어도 하나 이상의 프리즘 엘리먼트를 포함할 수 있다. 예를 들어, 상기 스티어링 컴포넌트(7230)는 제1 프리즘 엘리먼트(7231), 제2 프리즘 엘리먼트(7232) 및 제3 프리즘 엘리먼트(7233)를 포함할 수 있다.
또한, 상기 콜리메이션 컴포넌트(7220)는 상기 VCSEL array(7210)로부터 출력된 레이저를 콜리메이션 할 수 있다. 다만, 이에 대하여 상술한 내용이 적용될 수 있으므로 중복되는 서술은 생략하기로 한다.
또한, 상기 스티어링 컴포넌트(7230)는 상기 VCSEL array(7210)로부터 출력되어 상기 콜리메이션 컴포넌트(7220)를 통해 콜리메이션 된 레이저를 스티어링 할 수 있다. 다만, 이에 대하여 상술한 내용이 적용될 수 있으므로 중복되는 서술은 생략하기로 한다.
또한, 상기 VCSEL array(7210)에 포함되는 각각의 VCSEL unit은 독립적으로 제어되기 위하여 독립적인 전기적 컨택과 연결될 수 있다. 예를 들어, 상기 제1 VCSEL emitter(7211)는 제1 컨택(7241) 및 제2 컨택(7251)과 연결될 수 있으며, 상기 제2 VCSEL emitter(7212)는 제3 컨택(7242) 및 제4 컨택(7252)과 연결될 수 있고, 상기 제3 VCSEL emitter(7213)는 제5 컨택(7243) 및 제6 컨택(7253)과 연결될 수 있으나, 이에 한정되지 않는다.
또한, 상기 VCSEL array(7210)에 포함되는 각각의 VCSEL unit은 VCSEL unit별로 제어되기 위하여 VCSEL unit 내에 포함되는 VCSEL emitter들 간에 전기적 컨택을 공유할 수 있다. 예를 들어, 상기 제1 VCSEL unit에 포함되는 각각의 VCSEL emitter 들은 상기 제1 컨택(7241) 및 상기 제2 컨택(7251)을 공유할 수 있으며, 상기 제2 VCSEL unit에 포함되는 각각의 VCSEL emitter 들은 상기 제3 컨택(7242) 및 상기 제4 컨택(7252)을 공유할 수 있고, 상기 제3 VCSEL unit에 포함되는 각각의 VCSEL emitter들은 상기 제5 컨택(7243) 및 상기 제6 컨택(7253)을 공유할 수 있으나, 이에 한정되지 않는다.
또한, 상기 VCSEL array(7210)에 포함되는 각각의 VCSEL emitter는 서로 다른 시간에 동작할 수 있다. 예를 들어, 제1 시점에 상기 제1 컨택(7241) 및 상기 제2 컨택(7251)을 통해 상기 제1 VCSEL emitter(7211)가 동작되어 제1 레이저를 출력할 수 있으며, 제2 시점에 상기 제3 컨택(7242) 및 상기 제4 컨택(7252)을 통해 상기 제2 VCSEL emitter(7212)가 동작되어 제2 레이저를 출력할 수 있고, 제3 시점에 상기 제5 컨택(7243) 및 상기 제6 컨택(7253)을 통해 상기 제3 VCSEL emitter(7213)가 동작되어 제3 레이저를 출력할 수 있으나, 이에 한정되지 않는다.
또한, 상기 VCSEL array(7210)에 포함되는 각각의 VCSEL unit은 서로 다른 시간에 동작할 수 있다. 예를 들어, 제1 시점에 상기 제1 컨택(7241) 및 상기 제2 컨택(7251)을 통해 상기 제1 VCSEL unit이 동작되어 제1 레이저 그룹을 출력할 수 있으며, 제2 시점에 상기 제3 컨택(7242) 및 상기 제4 컨택(7252)을 통해 상기 제2 VCSEL unit이 동작되어 제2 레이저 그룹을 출력할 수 있고, 제3 시점에 상기 제5 컨택(7243) 및 상기 제6 컨택(7253)을 통해 상기 제3 VCSEL unit이 동작되어 제3 레이저 그룹을 출력할 수 있으나, 이에 한정되지 않는다.
이상과 같이 실시예들이 비록 한정된 실시예와 도면에 의해 설명되었으나, 해당 기술분야에서 통상의 지식을 가진 자라면 상기의 기재로부터 다양한 수정 및 변형이 가능하다. 예를 들어, 설명된 기술들이 설명된 방법과 다른 순서로 수행되거나, 및/또는 설명된 시스템, 구조, 장치, 회로 등의 구성요소들이 설명된 방법과 다른 형태로 결합 또는 조합되거나, 다른 구성요소 또는 균등물에 의하여 대치되거나 치환되더라도 적절한 결과가 달성될 수 있다.
그러므로, 다른 구현들, 다른 실시예들 및 특허청구범위와 균등한 것들도 후술하는 특허청구범위의 범위에 속한다.
전술한 바와 같이, 상기 발명의 실시를 위한 최선의 형태에서, 관련된 사항을 기술하였다.
Claims (21)
- 제1 축을 따라 배치되는 제1 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 유닛 및 제2 빅셀 유닛을 포함하는 제1 서브 어레이;상기 제1 서브 어레이에 연결되는 공통 컨택;상기 공통 컨택의 일단에 전기적으로 연결되는 제1 컨택; 및상기 제1 컨택의 일단과 상기 제1 빅셀 유닛 사이의 저항을 나타내는 제1 저항 및 상기 제1 빅셀 유닛과 상기 제2 빅셀 유닛 사이의 저항을 나타내는 제2 저항의 합성 저항이 감소되도록, 상기 공통 컨택의 다른 일단에 전기적으로 연결되는 제2 컨택을 포함하고,상기 제1 빅셀 유닛은 상기 제2 빅셀 유닛보다 상기 공통 컨택의 일단과 인접하고,상기 제2 빅셀 유닛은 상기 제1 빅셀 유닛보다 상기 공통 컨택의 다른 일단과 인접한빅셀 어레이.
- 제1항에 있어서,상기 제1 컨택 및 상기 제2 컨택에 동일한 크기의 전압이 인가되는빅셀 어레이.
- 제1항에 있어서,상기 공통 컨택 및 상기 제1 컨택을 연결하는 제1 와이어; 및상기 공통 컨택 및 상기 제2 컨택을 연결하는 제2 와이어를 포함하는빅셀 어레이.
- 제3항에 있어서,상기 제1 저항은 상기 제1 와이어의 저항을 포함하는빅셀 어레이.
- 제3항에 있어서,상기 제2 저항은 상기 제2 와이어의 저항을 포함하는빅셀 어레이.
- 제1항에 있어서,상기 제1 축과 상이한 제2 축을 따라 배치되는 상기 제1 빅셀 유닛 및 제3 빅셀 유닛을 포함하는 제2 서브 어레이;상기 제2 서브 어레이의 일단과 인접하게 배치되는 제3 컨택; 및상기 제2 서브 어레이의 다른 일단과 인접하게 배치되는 제4 컨택을 포함하고,상기 제1 빅셀 유닛은 상기 제3 컨택과 전기적으로 연결되어 있고,상기 제3 빅셀 유닛은 상기 제4 컨택과 전기적으로 연결되어 있는빅셀 어레이.
- 제6항에 있어서,상기 제3 컨택 및 상기 제4 컨택에 동일한 크기의 전압이 인가되는빅셀 어레이.
- 제6항에 있어서,상기 제1 컨택 및 상기 제2 컨택에는 음의 전압 및 양의 전압 중 어느 하나가 인가되고, 상기 제3 컨택 및 상기 제4 컨택에는 다른 하나가 인가되는빅셀 어레이.
- 제6항에 있어서,상기 제1 축을 따라 배치되는 상기 제3 빅셀 유닛 및 제4 빅셀 유닛을 포함하는 제3 서브 어레이;상기 제3 서브 어레이의 일단과 인접하게 배치되는 제5 컨택; 및상기 제3 서브 어레이의 다른 일단과 인접하게 배치되는 제6 컨택을 포함하고,상기 제3 빅셀 유닛은 상기 제5 컨택과 전기적으로 연결되어 있고,상기 제4 빅셀 유닛은 상기 제6 컨택과 전기적으로 연결되어 있고,상기 제1 빅셀 유닛은 동작시키고, 상기 제3 빅셀 유닛은 동작시키지 않기 위해, 상기 제1 컨택, 상기 제2 컨택, 상기 제3 컨택 및 상기 제4 컨택에는 전압을 인가하고, 상기 제5 컨택 및 상기 제6 컨택에는 전압을 인가하지 않는빅셀 어레이.
- 제1 축을 따라 배치되는 제1 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 유닛 및 제2 빅셀 유닛을 포함하는 제1 서브 어레이;상기 제1 서브 어레이에 연결되는 공통 컨택;상기 공통 컨택의 일단에 전기적으로 연결되는 제1 컨택; 및상기 제1 빅셀 유닛의 제1 합성 저항과 상기 제2 빅셀 유닛의 제2 합성 저항의 차이가 감소되도록, 상기 공통 컨택의 다른 일단에 전기적으로 연결되는 제2 컨택을 포함하고,상기 제1 합성 저항은 상기 공통 컨택의 일단과 상기 제1 빅셀 유닛 사이의 저항을 나타내는 제1 저항 및 상기 제1 빅셀 유닛과 상기 공통 컨택의 다른 일단 사이의 저항을 나타내는 제2 저항의 합성 저항이고,상기 제2 합성 저항은 상기 공통 컨택의 일단과 상기 제2 빅셀 유닛 사이의 저항을 나타내는 제3 저항 및 상기 제2 빅셀 유닛과 상기 공통 컨택의 다른 일단 사이의 저항을 나타내는 제4 저항의 합성 저항인빅셀 어레이.
- 제10항에 있어서,상기 제1 빅셀 유닛은 상기 제2 빅셀 유닛보다 상기 공통 컨택의 일단과 인접하고,상기 제2 빅셀 유닛은 상기 제1 빅셀 유닛보다 상기 공통 컨택의 다른 일단과 인접한빅셀 어레이.
- 제10항에 있어서,상기 제1 컨택 및 상기 제2 컨택에 동일한 크기의 전압이 인가되는빅셀 어레이.
- 제10항에 있어서,상기 공통 컨택 및 상기 제1 컨택을 연결하는 제1 와이어; 및상기 공통 컨택 및 상기 제2 컨택을 연결하는 제2 와이어를 포함하는빅셀 어레이.
- 제13항에 있어서,상기 제1 저항은 상기 제1 와이어의 저항을 포함하는빅셀 어레이.
- 제13항에 있어서,상기 제4 저항은 상기 제2 와이어의 저항을 포함하는빅셀 어레이.
- 제10항에 있어서,상기 제1 축과 상이한 제2 축을 따라 배치되는 상기 제1 빅셀 유닛 및 상기 제3 빅셀 유닛을 포함하는 제2 서브 어레이;상기 제2 서브 어레이의 일단과 인접하게 배치되는 제3 컨택; 및상기 제2 서브 어레이의 다른 일단과 인접하게 배치되는 제4 컨택을 포함하고,상기 제1 빅셀 유닛은 상기 제3 컨택과 전기적으로 연결되어 있고,상기 제3 빅셀 유닛은 상기 제4 컨택과 전기적으로 연결되어 있는빅셀 어레이.
- 제16항에 있어서,상기 제3 컨택 및 상기 제4 컨택에 동일한 크기의 전압이 인가되는빅셀 어레이.
- 제16항에 있어서,상기 제1 컨택 및 상기 제2 컨택에는 기준 전압 이상의 전압 및 상기 기준 전압 이하의 전압 중 어느 하나가 인가되고, 상기 제3 컨택 및 상기 제4 컨택에는 다른 하나가 인가되는빅셀 어레이.
- 제16항에 있어서,상기 제1 축을 따라 배치되는 상기 제3 빅셀 유닛 및 제4 빅셀 유닛을 포함하는 제3 서브 어레이;상기 제3 서브 어레이의 일단과 인접하게 배치되는 제5 컨택; 및상기 제3 서브 어레이의 다른 일단과 인접하게 배치되는 제6 컨택을 포함하고,상기 제3 빅셀 유닛은 상기 제5 컨택과 전기적으로 연결되어 있고,상기 제4 빅셀 유닛은 상기 제6 컨택과 전기적으로 연결되어 있고,상기 제1 빅셀 유닛은 동작시키고, 상기 제3 빅셀 유닛은 동작시키지 않기 위해, 상기 제1 컨택, 상기 제2 컨택, 상기 제3 컨택 및 상기 제4 컨택에는 전압을 인가하고, 상기 제5 컨택 및 상기 제6 컨택에는 전압을 인가하지 않는빅셀 어레이.
- 대상체를 향해 레이저를 조사하는 레이저 출력부; 및상기 레이저 출력부에서 조사된 레이저가 상기 대상체에 반사되어 되돌아오는 레이저를 수광하는 레이저 수광부를 포함하고,상기 레이저 출력부는,제1 축을 따라 배치되는 제1 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 유닛 및 제2 빅셀 유닛을 포함하는 제1 서브 어레이,상기 제1 서브 어레이에 연결되는 공통 컨택,상기 공통 컨택의 일단에 전기적으로 연결되는 제1 컨택, 및상기 제1 컨택의 일단과 상기 제1 빅셀 유닛 사이의 저항을 나타내는 제1 저항 및 상기 제1 빅셀 유닛과 상기 제2 빅셀 유닛 사이의 저항을 나타내는 제2 저항의 합성 저항이 감소되도록, 상기 공통 컨택의 다른 일단에 전기적으로 연결되는 제2 컨택을 포함하고,상기 제1 빅셀 유닛은 상기 제2 빅셀 유닛보다 상기 공통 컨택의 일단과 인접하고,상기 제2 빅셀 유닛은 상기 제1 빅셀 유닛보다 상기 공통 컨택의 다른 일단과 인접한라이다 장치.
- 대상체를 향해 레이저를 조사하는 레이저 출력부; 및상기 레이저 출력부에서 조사된 레이저가 상기 대상체에 반사되어 되돌아오는 레이저를 수광하는 레이저 수광부를 포함하고,상기 레이저 출력부는,제1 축을 따라 배치되는 제1 빅셀(VCSEL : Vertical Cavity Surface Emitting Laser) 유닛 및 제2 빅셀 유닛을 포함하는 제1 서브 어레이,상기 제1 서브 어레이에 연결되는 공통 컨택,상기 공통 컨택의 일단에 전기적으로 연결되는 제1 컨택, 및상기 제1 빅셀 유닛의 제1 합성 저항과 상기 제2 빅셀 유닛의 제2 합성 저항의 차이가 감소되도록, 상기 공통 컨택의 다른 일단에 전기적으로 연결되는 제2 컨택을 포함하고,상기 제1 합성 저항은 상기 공통 컨택의 일단과 상기 제1 빅셀 유닛 사이의 저항을 나타내는 제1 저항 및 상기 제1 빅셀 유닛과 상기 공통 컨택의 다른 일단 사이의 저항을 나타내는 제2 저항의 합성 저항이고,상기 제2 합성 저항은 상기 공통 컨택의 일단과 상기 제2 빅셀 유닛 사이의 저항을 나타내는 제3 저항 및 상기 제2 빅셀 유닛과 상기 공통 컨택의 다른 일단 사이의 저항을 나타내는 제4 저항의 합성 저항인라이다 장치.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP20856997.0A EP4024631A4 (en) | 2019-08-28 | 2020-07-29 | VCSEL NETWORK AND LIDAR DEVICE USING IT |
Applications Claiming Priority (12)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201962893080P | 2019-08-28 | 2019-08-28 | |
| US62/893,080 | 2019-08-28 | ||
| KR10-2019-0169501 | 2019-12-18 | ||
| KR1020190169501A KR102873358B1 (ko) | 2019-08-28 | 2019-12-18 | 거리 측정 장치 |
| KR1020190171660A KR102864514B1 (ko) | 2019-08-28 | 2019-12-20 | 거리 측정 장치 |
| KR10-2019-0171660 | 2019-12-20 | ||
| KR10-2020-0015002 | 2020-02-07 | ||
| KR1020200015002A KR102846740B1 (ko) | 2019-08-28 | 2020-02-07 | 빅셀 및 이를 이용한 라이다 장치 |
| KR10-2020-0025574 | 2020-02-28 | ||
| KR1020200025574A KR102873363B1 (ko) | 2019-08-28 | 2020-02-28 | 빅셀 어레이 및 이를 이용한 라이다 장치 |
| KR10-2020-0043639 | 2020-04-09 | ||
| KR1020200043639A KR102952400B1 (ko) | 2019-08-28 | 2020-04-09 | 빅셀 어레이 및 이를 이용한 라이다 장치 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021040250A1 true WO2021040250A1 (ko) | 2021-03-04 |
Family
ID=74681468
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/KR2020/009982 Ceased WO2021040250A1 (ko) | 2019-08-28 | 2020-07-29 | 빅셀 어레이 및 이를 이용한 라이다 장치 |
Country Status (3)
| Country | Link |
|---|---|
| US (3) | US11063408B2 (ko) |
| EP (1) | EP4024631A4 (ko) |
| WO (1) | WO2021040250A1 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20220171031A1 (en) * | 2020-08-24 | 2022-06-02 | Innoviz Technologies Ltd. | Multiple simultaneous laser beam emission and illumination while ensuring eye safety |
| US12481033B1 (en) * | 2024-10-09 | 2025-11-25 | Guilin University Of Technology | Laser scanning device of UAV-borne LiDAR for water depth measurement, LiDAR, and UAV |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12123950B2 (en) | 2016-02-15 | 2024-10-22 | Red Creamery, LLC | Hybrid LADAR with co-planar scanning and imaging field-of-view |
| US11556000B1 (en) | 2019-08-22 | 2023-01-17 | Red Creamery Llc | Distally-actuated scanning mirror |
| US12399279B1 (en) | 2016-02-15 | 2025-08-26 | Red Creamery Llc | Enhanced hybrid LIDAR with high-speed scanning |
| US12399278B1 (en) | 2016-02-15 | 2025-08-26 | Red Creamery Llc | Hybrid LIDAR with optically enhanced scanned laser |
| US11222987B2 (en) * | 2018-03-21 | 2022-01-11 | Intel Corporation | Optical receiver employing a metasurface collection lens having concentric belts or rings |
| EP4024631A4 (en) | 2019-08-28 | 2023-09-20 | SOS LAB Co., Ltd | VCSEL NETWORK AND LIDAR DEVICE USING IT |
| US11681048B2 (en) | 2020-07-31 | 2023-06-20 | Uatc, Llc | Multi-channel light detection and ranging (LIDAR) unit having a telecentric lens assembly and single circuit board for emitters and detectors |
| CN116964476A (zh) * | 2021-03-17 | 2023-10-27 | 神经推进系统股份有限公司 | 用于组合多个光学部件阵列的系统、方法和装置 |
| US12025771B2 (en) * | 2021-03-30 | 2024-07-02 | Meta Platforms Technologies, Llc | Dynamic beam steering with metasurface |
| DE102021119423B4 (de) * | 2021-07-27 | 2025-01-16 | Sick Ag | Optoelektronischer Sensor und Verfahren zur Erfassung eines Objekts nach dem Prinzip der Triangulation |
| JP2024005895A (ja) * | 2022-06-30 | 2024-01-17 | 株式会社小糸製作所 | 測定装置及び照射装置 |
| US12228778B2 (en) * | 2022-07-15 | 2025-02-18 | Advanced Semiconductor Engineering, Inc. | Optoelectronic package |
| JP2024055307A (ja) * | 2022-10-07 | 2024-04-18 | デクセリアルズ株式会社 | 光照射装置、光測距装置および車両 |
| JP2025084617A (ja) * | 2023-11-22 | 2025-06-03 | 株式会社タムロン | メタレンズ、その製造方法および照明装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07183579A (ja) * | 1993-12-22 | 1995-07-21 | Kyocera Corp | 単眼レンズヘッド用ledアレイ |
| US20170365984A1 (en) * | 2016-06-15 | 2017-12-21 | GM Global Technology Operations LLC | Monolithic two-dimensional vcsel array |
| KR20180128447A (ko) * | 2016-04-22 | 2018-12-03 | 옵시스 테크 엘티디 | 다파장 lidar 시스템 |
| KR20190035899A (ko) * | 2016-09-19 | 2019-04-03 | 애플 인크. | 실리콘 제어 백플레인 상에 통합된 수직 이미터 |
| US20190199063A1 (en) * | 2017-12-27 | 2019-06-27 | Lumentum Operations Llc | Impedance compensation along a channel of emitters |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002316327A (ja) | 2001-04-20 | 2002-10-29 | Nakane:Kk | プリズムシートの製造方法 |
| KR20040061658A (ko) | 2002-12-31 | 2004-07-07 | 삼성전자주식회사 | 하이브리드 애크로매틱 광학 렌즈 및 그 제조방법 |
| KR100820349B1 (ko) | 2007-06-20 | 2008-04-08 | 최기종 | 마이크로렌즈 어레이 장치의 제조방법 |
| US8950924B2 (en) | 2009-12-08 | 2015-02-10 | 3M Innovative Properties Company | Optical constructions incorporating a light guide and low refractive index films |
| US8675706B2 (en) * | 2011-12-24 | 2014-03-18 | Princeton Optronics Inc. | Optical illuminator |
| US9268012B2 (en) * | 2013-07-12 | 2016-02-23 | Princeton Optronics Inc. | 2-D planar VCSEL source for 3-D imaging |
| US9594159B2 (en) | 2013-07-15 | 2017-03-14 | Texas Instruments Incorporated | 2-D object detection in radar applications |
| US20160072258A1 (en) * | 2014-09-10 | 2016-03-10 | Princeton Optronics Inc. | High Resolution Structured Light Source |
| CN107429993B (zh) | 2015-01-29 | 2021-06-15 | 新加坡恒立私人有限公司 | 用于产生图案化照明的装置 |
| KR102474708B1 (ko) | 2015-11-27 | 2022-12-06 | 삼성전자주식회사 | 빔 스티어링 소자 및 이를 포함하는 시스템 |
| KR102407344B1 (ko) | 2016-04-01 | 2022-06-13 | 한국전자기술연구원 | 확장된 수평 시야각을 가지는 스캐닝 라이다 장치 |
| KR20170138648A (ko) | 2016-06-08 | 2017-12-18 | 엘지전자 주식회사 | 차량용 라이다 장치 및 차량 |
| KR102554215B1 (ko) | 2016-09-20 | 2023-07-11 | 이노비즈 테크놀로지스 엘티디 | Lidar 시스템 및 방법 |
| CN113466882B (zh) | 2017-07-05 | 2026-03-24 | 奥斯特公司 | 光测距装置 |
| US10514444B2 (en) | 2017-07-28 | 2019-12-24 | OPSYS Tech Ltd. | VCSEL array LIDAR transmitter with small angular divergence |
| KR102404742B1 (ko) | 2017-11-13 | 2022-06-07 | 엘지이노텍 주식회사 | 광 제어 부재 및 이를 포함하는 표시 장치 |
| WO2019099490A1 (en) | 2017-11-14 | 2019-05-23 | Continental Automotive Systems, Inc. | Flash lidar sensor assembly |
| DE102017222969A1 (de) | 2017-12-15 | 2019-06-19 | Ibeo Automotive Systems GmbH | Verfahren zur verbesserten Nah- und Ferndetektion einer LIDAR Empfangseinheit |
| CN112105955A (zh) * | 2018-04-09 | 2020-12-18 | 感应光子公司 | 用于自主车辆的lidar的自动增益控制 |
| EP3588702A1 (en) * | 2018-06-26 | 2020-01-01 | Koninklijke Philips N.V. | Vcsel array with small pulse delay |
| KR102634887B1 (ko) * | 2019-04-09 | 2024-02-08 | 옵시스 테크 엘티디 | 레이저 제어를 갖는 솔리드-스테이트 lidar 송신기 |
| EP4024631A4 (en) | 2019-08-28 | 2023-09-20 | SOS LAB Co., Ltd | VCSEL NETWORK AND LIDAR DEVICE USING IT |
-
2020
- 2020-07-29 EP EP20856997.0A patent/EP4024631A4/en active Pending
- 2020-07-29 WO PCT/KR2020/009982 patent/WO2021040250A1/ko not_active Ceased
- 2020-08-28 US US17/005,806 patent/US11063408B2/en active Active
-
2021
- 2021-05-28 US US17/334,066 patent/US12184040B2/en active Active
-
2024
- 2024-11-15 US US18/949,847 patent/US20250079806A1/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07183579A (ja) * | 1993-12-22 | 1995-07-21 | Kyocera Corp | 単眼レンズヘッド用ledアレイ |
| KR20180128447A (ko) * | 2016-04-22 | 2018-12-03 | 옵시스 테크 엘티디 | 다파장 lidar 시스템 |
| US20170365984A1 (en) * | 2016-06-15 | 2017-12-21 | GM Global Technology Operations LLC | Monolithic two-dimensional vcsel array |
| KR20190035899A (ko) * | 2016-09-19 | 2019-04-03 | 애플 인크. | 실리콘 제어 백플레인 상에 통합된 수직 이미터 |
| US20190199063A1 (en) * | 2017-12-27 | 2019-06-27 | Lumentum Operations Llc | Impedance compensation along a channel of emitters |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4024631A4 * |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20220171031A1 (en) * | 2020-08-24 | 2022-06-02 | Innoviz Technologies Ltd. | Multiple simultaneous laser beam emission and illumination while ensuring eye safety |
| US11726181B2 (en) * | 2020-08-24 | 2023-08-15 | Innoviz Technologies Ltd. | Multiple simultaneous laser beam emission and illumination while ensuring eye safety |
| US12282118B2 (en) * | 2020-08-24 | 2025-04-22 | Innoviz Technologies Ltd. | Multiple simultaneous laser beam emission and illumination while ensuring eye safety |
| US12481033B1 (en) * | 2024-10-09 | 2025-11-25 | Guilin University Of Technology | Laser scanning device of UAV-borne LiDAR for water depth measurement, LiDAR, and UAV |
Also Published As
| Publication number | Publication date |
|---|---|
| US20250079806A1 (en) | 2025-03-06 |
| US20210288472A1 (en) | 2021-09-16 |
| EP4024631A4 (en) | 2023-09-20 |
| US11063408B2 (en) | 2021-07-13 |
| EP4024631A1 (en) | 2022-07-06 |
| US12184040B2 (en) | 2024-12-31 |
| US20210066893A1 (en) | 2021-03-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2021040250A1 (ko) | 빅셀 어레이 및 이를 이용한 라이다 장치 | |
| WO2021096264A2 (ko) | 레이저 출력 어레이 및 이를 이용한 라이다 장치 | |
| WO2021235778A1 (ko) | 라이다 장치 | |
| WO2019135494A1 (ko) | 라이다 장치 | |
| WO2019135493A1 (ko) | 라이다 장치 | |
| WO2022102856A1 (ko) | 라이다 장치 | |
| US6549692B1 (en) | Optical monitoring of the angular position of micro mirrors in an optical switch | |
| WO2021045529A1 (ko) | 라이다 장치 | |
| WO2018174539A1 (ko) | 반도체소자 패키지 및 자동 초점 장치 | |
| WO2018139877A1 (ko) | 반도체 소자 | |
| EP3718137A1 (en) | Led unit for display and display apparatus having the same | |
| WO2019216596A1 (ko) | 표면발광레이저 패키지 | |
| WO2019216724A1 (ko) | 표면발광레이저 패키지 및 이를 포함하는 발광장치 | |
| WO2021177692A1 (ko) | 거리 측정 카메라 장치 | |
| WO2015053600A1 (ko) | 반도체 발광소자 | |
| WO2019054793A1 (ko) | 발광소자 패키지 | |
| WO2018110981A1 (ko) | 광 전송 모듈 | |
| WO2024128546A1 (ko) | 고해상도 라이다 데이터를 생성하기 위해 이용하는 라이다 장치 | |
| US6470110B1 (en) | Monolithic integration of control elements and micro-mirror in an optical switch | |
| WO2023101038A1 (ko) | 라이다 장치 | |
| WO2018164538A1 (ko) | 스캐너 | |
| WO2019035653A1 (ko) | 표면발광레이저 패키지 | |
| WO2018217006A2 (ko) | 반도체 발광소자 및 이의 제조 방법 | |
| WO2025170263A1 (ko) | 레이저 이미팅 어셈블리 및 레이저 디텍팅 어셈블리를 포함하는 라이다 장치 | |
| WO2024096421A1 (ko) | 레이저 출력 어레이 및 레이저 검출 어레이를 포함하는 라이다 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20856997 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2020856997 Country of ref document: EP Effective date: 20220328 |