WO2021070621A1 - コミュニケーションシステム及びロボット - Google Patents
コミュニケーションシステム及びロボット Download PDFInfo
- Publication number
- WO2021070621A1 WO2021070621A1 PCT/JP2020/036016 JP2020036016W WO2021070621A1 WO 2021070621 A1 WO2021070621 A1 WO 2021070621A1 JP 2020036016 W JP2020036016 W JP 2020036016W WO 2021070621 A1 WO2021070621 A1 WO 2021070621A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- robot
- mode
- computer
- command
- robots
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images





Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/02—Reservations, e.g. for tickets, services or events
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/0005—Manipulators having means for high-level communication with users, e.g. speech generator, face recognition means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
- B25J19/021—Optical sensing devices
- B25J19/023—Optical sensing devices including video camera means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
- B25J5/007—Manipulators mounted on wheels or on carriages mounted on wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1679—Program controls characterised by the tasks executed
- B25J9/1689—Teleoperation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/10—Office automation; Time management
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q30/00—Commerce
- G06Q30/02—Marketing; Price estimation or determination; Fundraising
- G06Q30/0283—Price estimation or determination
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q30/00—Commerce
- G06Q30/04—Billing or invoicing
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q30/00—Commerce
- G06Q30/06—Buying, selling or leasing transactions
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q30/00—Commerce
- G06Q30/06—Buying, selling or leasing transactions
- G06Q30/0645—Rental transactions; Leasing transactions
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q50/00—Information and communication technology [ICT] specially adapted for implementation of business processes of specific business sectors, e.g. utilities or tourism
- G06Q50/10—Services
-
- G—PHYSICS
- G07—CHECKING-DEVICES
- G07F—COIN-FREED OR LIKE APPARATUS
- G07F17/00—Coin-freed apparatus for hiring articles; Coin-freed facilities or services
- G07F17/0014—Coin-freed apparatus for hiring articles; Coin-freed facilities or services for vending, access and use of specific services not covered anywhere else in G07F17/00
Definitions
- the present invention relates to a communication system and a robot.
- Patent Document 1 a camera that provides a photographed image to a remote operator, a mask process that hides at least a part of the photographed image from the remote operator, and a mask process are used.
- a moving body with a camera including a mask processing unit that switches according to the situation is described.
- the conventional telepresence robot is started to be used after an authentication process such as login, and cannot be used by an unauthorized user.
- Such robots are the property of the owner, but due to their limited use, they may have a long non-operating time and may be difficult to utilize.
- the present invention provides a communication system and a robot that make it easy to utilize the robot.
- the communication system is a communication system including a non-fixed robot and a plurality of computers capable of communicating with the robot, and the robot is a camera and an unspecified computer among the plurality of computers. It has a first mode that operates based on the command of the above and a mode switching unit that switches the second mode that operates based on the command of a specific computer authenticated by the user among a plurality of computers, and the computer has a command to the robot. It has an input unit for inputting an image and a display unit for displaying an image taken by a computer.
- the robot since the first mode and the second mote of the robot can be switched, the robot is used as the second mode while being disclosed as the first mode in the free time not used by the owner.
- the robot can be operated by an unspecified user, and the price can be obtained.
- the robot can be opened to the public as a first mode, and the owner can communicate with an unspecified user. In this way, the robot can be used more effectively.
- the robot operating in the first mode may accept advance reservations from a plurality of computers and operate based on the command of the computer making the reservation during the reserved period.
- the robot can be lent to an unspecified user for an hour and used as an asset.
- a plurality of robots are provided, the display unit displays a list of the robots operating in the first mode among the plurality of robots, and the input unit accepts selection of one of the robots operating in the first mode. , You may enter a command for the selected robot.
- the robot that can be used by an unspecified user can be grasped at a glance, the use of the robot can be promoted, and the robot can be more utilized.
- a plurality of robots are provided, and the display unit displays a list of the robots operating in the first mode among the plurality of robots and the robots operating in the user-authenticated second mode among the plurality of robots, and the input unit. May accept the selection of either one of the robots operating in the first mode or the robot operating in the second mode, and input a command to the selected robot.
- a robot that can be used by an unspecified user and a pre-registered robot can be grasped at a glance, the use of the robot can be promoted, and the robot can be more utilized.
- the robot according to another aspect of the present invention is a mobile or wearable robot having a camera and a drive unit that can be remotely operated, and has a mode switching unit that switches between a first mode and a second mode, and a first.
- a mode switching unit that switches between a first mode and a second mode, and a first.
- a command is received from an unspecified computer among a plurality of computers
- a second mode is set, a command is issued from a specific user-authenticated computer among a plurality of computers.
- It includes a reception unit that accepts, a control unit that controls a drive unit in response to a received command, and a transmission unit that transmits an image acquired by a camera to a computer that has input a command.
- the robot since the first mode and the second mote of the robot can be switched, the robot is used as the second mode while being disclosed as the first mode in the free time not used by the owner.
- the robot can be operated by an unspecified user, and the price can be obtained.
- the robot can be opened to the public as a first mode, and the owner can communicate with an unspecified user. In this way, the robot can be used more effectively.
- FIG. 1 is a diagram showing a network configuration of a communication system 100 according to an embodiment of the present invention.
- the communication system 100 includes non-fixed robots 20, 21 and 22, and a plurality of computers 10 and 11 capable of communicating with the robots 20, 21 and 22.
- the fact that the robots 20, 21 and 22 and the computers 10 and 11 can communicate includes that wireless communication or wired communication is possible, and communication via the Internet or LAN (Local Area Network) is possible or near. This includes cases where range wireless communication is possible.
- LAN Local Area Network
- the robots 20, 21 and 22, are a camera, a first mode M1 that operates based on a command of an unspecified computer among the plurality of computers 10 and 11, and a specific user authenticated among the plurality of computers 10 and 11. It has a mode switching unit for switching a second mode M2 that operates based on a command of a computer used by the user.
- the "unspecified computer” may be a computer that has accessed a dedicated site for operating the robots 20, 21, 22 or has an application for operating the robots 20, 21, 22 installed. It may be a computer or a computer in which user registration for using the robots 20, 21 and 22 has been performed in advance.
- the robots 20, 21 and 22 may be composed of, for example, a telepresence robot or an avatar robot, and may have a moving portion such as wheels.
- the robot 20 is operating in the second mode M2, and receives only commands from the computer 10 used by the user-authenticated user.
- the robots 21 and 22 are operating in the first mode M1 and receive commands from all the computers 10 and 11.
- Robots 21 and 22 that operate in the first mode M1 operate based on commands from computers 10 and 11 without user authentication. However, if commands are received from a plurality of computers at the same time, the commands are complicated. Therefore, the robots 21 and 22 operating in the first mode M1 receive advance reservations and operate based on the commands of the computer used by the reserved user. You may try to do it. On the other hand, the robot 20 that operates in the second mode M2 operates based on a command from the computer 10 that has succeeded in user authentication.
- the user authentication may be performed by a known method (for example, a user name and password, biometric authentication, etc.), and the information for the user authentication may be registered in advance.
- the robot 20 that operates in the second mode M2 may also be operated based on a computer command used by a user who has made a reservation in advance among the users who have succeeded in user authentication.
- the robots 21 and 22 operating in the first mode M1 are robots operating in the public mode that do not require user authentication, that is, no special access authority is required, and the robot 20 operating in the second mode M2 is user authentication. Is required, that is, a robot that operates in private mode that requires special access privileges (user authentication is a means of confirming access privileges).
- special access authority may be provided step by step. For example, as special access authority, a first access authority and a second access authority which is more special than the first access authority may be provided.
- the robot has a second access authority (successful second user authentication) than the command of the computer used by the first user having the first access authority (successful first user authentication).
- a second access authority for example, the owner or administrator of the robots 20, 21, 22
- the command of the computer used by the first user having the first access authority (successful first user authentication).
- the second user for example, the owner or administrator of the robots 20, 21, 22
- You may give the authority to change the access authority itself.
- the robots 20, 21 and 22 are not fixed in the case where the robots 20, 21 and 22 are mobile type having a moving part such as wheels, and the case where they can be worn by a person and have a driving part such as a manipulator. Including some cases.
- the mobile robot is shown in, for example, Patent Document 1.
- the moving part of the mobile robot is one that travels by one wheel, two wheels or multiple wheels, one that travels by a caterpillar, one that travels on a rail, one that jumps and moves, bipedal walking, four-legged walking or multi-legged walking. Includes those that navigate on or under water with screws and those that fly with propellers and the like.
- Wearable robots include, for example, MHD Yaman Saraiji, Tomoya Sasaki, Reo Matsumura, Kouta Minamizawa and Masahiko Inami, "Fusion: full body surrogacy for collaborative communication," Proceeding SIGGRAPH '18 ACM It has been published.
- the robots 20, 21 and 22, include vehicles and heavy machinery capable of automatic or semi-automatic traveling, and drones and airplanes.
- the robots 20, 21 and 22, include a robot installed in a sports stadium or the like and equipped with a camera that can move on rails.
- the robots 20, 21 and 22, are satellite-type robots launched into outer space, and include robots capable of attitude control and control of the shooting direction of the camera.
- the mode switching unit of the robots 20, 21 and 22 may be realized by a physical switch or by software.
- the mode switching unit is realized by a physical switch
- the first mode M1 and the second mode M2 can be switched by switching the switches provided on the robots 20, 21 and 22.
- the mode switching unit is realized by software, the user authentication process is performed, and the user who succeeds in user authentication operates the input unit provided in the robots 20, 21 and 22, and the first mode M1 and the first mode M1 and the first mode are operated.
- the two modes M2 can be switched, or the first mode M1 and the second mode M2 can be switched by a command from a computer that has succeeded in user authentication.
- the user's access authority authentication process
- the first access authority first user authentication process
- the second access authority second access authority which is more special than the first access authority (1st user authentication process).
- the first mode M1 and the second mode M2 are provided only by a command from the computer of the user having the second access authority (the computer that succeeds in the second user authentication). You may switch between.
- the mode switching unit is realized by software, the administrator of the robots 20, 21 and 22, can switch between the first mode M1 and the second mode M2 while being at a remote location.
- the computers 10 and 11 have an input unit for inputting commands to the robots 20, 21 and 22, and a display unit for displaying images taken by the cameras of the robots 20, 21 and 22.
- the computers 10 and 11 are composed of, for example, smartphones, but may be composed of a personal computer or the like. Users of computers 10 and 11 can communicate with other users in remote areas where robots 20, 21 and 22 are located via robots 20, 21 and 22.
- the robots 20, 21 and 22 can be switched between the first mode M1 and the second mote M2, so that the robot 20, 21 and 22 can be used as the second mode M2 while being used by a specific user. It is open to the public as the first mode M1 in the free time not used by a specific user, and the robots 20, 21 and 22 can be shared by an unspecified user. At this time, a specific user may be able to obtain the consideration. Further, the robots 20, 21 and 22 can be disclosed as the first mode M1 so that the owner can communicate with an unspecified user. In this way, the robots 20, 21 and 22, can be used more effectively.
- the computers 10 and 11 are collectively referred to as the computer 10.
- the robots 20, 21 and 22, are collectively referred to as the robot 20.
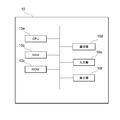
- FIG. 2 is a diagram showing a physical configuration of the computer 10 according to the present embodiment.
- the computer 10 includes a CPU (Central Processing Unit) 10a corresponding to a calculation unit, a RAM (Random Access Memory) 10b corresponding to a storage unit, a ROM (Read only Memory) 10c corresponding to a storage unit, and a communication unit 10d. , And an input unit 10e and a display unit 10f.
- Each of these configurations is connected to each other via a bus so that data can be transmitted and received.
- the computer 10 may be realized by combining a plurality of computers.
- the configuration shown in FIG. 2 is an example, and the computer 10 may have configurations other than these, or may not have a part of these configurations.
- the CPU 10a is a control unit that controls execution of a program stored in the RAM 10b or ROM 10c, calculates data, and processes data.
- the CPU 10a is a calculation unit that executes a program (communication program) that controls communication via a robot.
- the CPU 10a receives various data from the input unit 10e and the communication unit 10d, displays the calculation result of the data on the display unit 10f, and stores the data in the RAM 10b.
- the RAM 10b is a storage unit in which data can be rewritten, and may be composed of, for example, a semiconductor storage element.
- the RAM 10b may store data such as a program executed by the CPU 10a and user information. It should be noted that these are examples, and data other than these may be stored in the RAM 10b, or a part of these may not be stored.
- the ROM 10c is a storage unit capable of reading data, and may be composed of, for example, a semiconductor storage element.
- the ROM 10c may store, for example, a communication program or data that is not rewritten.
- the communication unit 10d is an interface for connecting the computer 10 to another device.
- the communication unit 10d may be connected to a communication network such as the Internet.
- the input unit 10e receives data input from the user, and may include, for example, a keyboard and a touch panel. Further, the input unit 10e may include a microphone for voice input.
- the display unit 10f visually displays the calculation result by the CPU 10a, and may be configured by, for example, an LCD (Liquid Crystal Display).
- the display unit 10f may display an image taken by the camera 20h of the robot 20.
- the communication program may be stored in a storage medium readable by a computer such as RAM 10b or ROM 10c and provided, or may be provided via a communication network connected by the communication unit 10d.
- a computer such as RAM 10b or ROM 10c and provided, or may be provided via a communication network connected by the communication unit 10d.
- various operations for controlling the robot 20 are realized by executing the communication program by the CPU 10a.
- the computer 10 may include an LSI (Large-Scale Integration) in which the CPU 10a and the RAM 10b or ROM 10c are integrated.
- FIG. 3 is a diagram showing a physical configuration of the robot 20 according to the present embodiment.
- the robot 20 includes a CPU 20a corresponding to a calculation unit, a RAM 20b corresponding to a storage unit, a ROM 20c corresponding to a storage unit, a communication unit 20d, an input unit 20e, a display unit 20f, a drive unit 20g, and a camera 20h. And have.
- Each of these configurations is connected to each other via a bus so that data can be transmitted and received.
- the configuration shown in FIG. 3 is an example, and the robot 20 may have configurations other than these, or may not have a part of these configurations.
- the CPU 20a is a control unit that controls execution of a program stored in the RAM 20b or ROM 20c, calculates data, and processes data.
- the CPU 20a is a calculation unit that executes a program (communication program) that controls communication via a robot.
- the CPU 20a receives various data from the input unit 20e and the communication unit 20d, displays the calculation result of the data on the display unit 20f, and stores the data in the RAM 20b. Further, the CPU 20a controls the drive unit 20g and controls the operation of the robot 20.
- the RAM 20b is a storage unit in which data can be rewritten, and may be composed of, for example, a semiconductor storage element.
- the RAM 20b may store a program executed by the CPU 20a. It should be noted that these are examples, and data other than these may be stored in the RAM 20b, or a part of these may not be stored.
- the ROM 20c is a storage unit capable of reading data, and may be composed of, for example, a semiconductor storage element.
- the ROM 20c may store, for example, a communication program or data that is not rewritten.
- the communication unit 20d is an interface for connecting the robot 20 to another device.
- the communication unit 20d may be connected to a communication network such as the Internet.
- the input unit 20e receives data input from the user, and may include, for example, a touch panel. Further, the input unit 20e may include a microphone for voice input.
- the display unit 20f visually displays the calculation result by the CPU 20a, and may be configured by, for example, an LCD.
- the display unit 20f may display an image taken by the camera of the computer 10.
- the drive unit 20 g includes an actuator that can be remotely controlled, and includes a moving unit such as a wheel and a manipulator.
- a moving unit such as a wheel
- the drive unit 20 g includes at least a moving unit such as wheels, but may include a manipulator.
- the drive unit 20 g includes at least a manipulator.
- the camera 20h includes an image sensor that captures a still image or a moving image, and transmits the captured still image or moving image to the computer 10 via the communication unit 20d.
- the communication program may be stored in a storage medium readable by a computer such as RAM 20b or ROM 20c and provided, or may be provided via a communication network connected by the communication unit 20d.
- various operations for controlling the robot 20 are realized by executing the communication program by the CPU 20a.
- the robot 20 may include an LSI in which the CPU 20a and the RAM 20b or the ROM 20c are integrated.
- FIG. 4 is a diagram showing an example of a first screen displayed on the computer 10 according to the present embodiment.
- the first screen example is a screen example that accepts advance reservations for using the robot 20.
- the time zone shown as "private use” is the time zone in which the robot operates in the second mode
- the time zone shown as "reserved” is the time zone in which the robot operates in the first mode. It is a time zone in which the user has already reserved the use in advance.
- the blank time zone is a time zone in which the robot operates in the first mode and is not reserved in advance.
- the robot 20 operating in the first mode receives advance reservations from a plurality of computers 10 and operates based on the command of the computer 10 that made the reservation during the reserved period. As a result, the robot 20 can be lent to an unspecified user for an hour and used as an asset.
- the robot 20 operating in the first mode operates based on the command of the computer 10 reserved in advance, the image taken by the camera of the robot 20 may be shared with other computers not reserved. , You may share the sound acquired by the microphone.
- the display unit 10f displays a list of the robots 20 operating in the first mode among the plurality of robots 20.
- the first robot located in Tokyo operates in the first mode for the time zone after 11:00
- the second robot located in New York operates in the first mode for the time zone after 9:00. It is operating in mode.
- the input unit 10e accepts the selection of any of the robots 20 operating in the first mode, and inputs a command to the selected robot 20. For example, when an advance reservation is made to use the first robot from 11:00 to 11:30, a command to the first robot is input by the input unit 10e during that time zone. In this way, the robot 20 that can be used by an unspecified user can be grasped at a glance, the use of the robot 20 can be promoted, and the robot 20 can be more utilized.
- the display unit 10f displays a list of the robot 20 operating in the first mode among the plurality of robots 20 and the robot 20 operating in the pre-registered second mode among the plurality of robots 20.
- the first robot located in Tokyo is indicated as "private use" for the time zone from 9:00 to 11:00, and is operating in the second mode.
- the input unit 10e accepts the selection of either the robot 20 operating in the first mode or the robot 20 operating in the second mode, and inputs a command to the selected robot 20. In this way, the robot 20 that can be used by an unspecified user and the pre-registered robot 20 can be grasped at a glance, the use of the robot 20 is promoted, and the robot 20 is made more utilized. Can be done.
- FIG. 5 is a diagram showing an example of a second screen displayed on the computer 10 according to the present embodiment.
- the second screen example is a screen example for selecting content before starting to use the robot 20.
- flat-rate content and sales content can be selected.
- the flat-rate content is content prepared in advance by the owner of the robot 20, and includes, for example, a dialogue with the owner of the robot 20, a tour of the facility where the robot 20 is located, an activity using the robot 20, and the like.
- the price of the flat-rate content is "1,000 yen".
- the price of the flat-rate content may fluctuate according to the time when the robot 20 is used.
- the sales content is the content sold on the content platform, and may include the content created by various users.
- the content platform is similar to a platform for downloading an application to a smartphone, and various users register and sell content using the robot 20.
- the owner has an opportunity to earn profits and the content creator has an opportunity to earn profits.
- the robot 20 can be used more effectively.
- FIG. 6 is a flowchart of processing executed by the computer 10 according to the present embodiment.
- the computer 10 displays a list of the robot 20 operating in the first mode and the robot 20 operating in the second mode among the plurality of robots 20 (S10).
- the computer 10 accepts the selection of either the robot 20 operating in the first mode or the second mode (S11).
- the computer 10 When the robot 20 operating in the first mode is selected (S12: YES), the computer 10 accepts the advance reservation of the robot 20 operating in the first mode (S13) and accepts the selection of the content (S14). Then, the content usage fee billing process is performed (S15).
- the usage fee billing process may be, for example, a process of billing the usage fee using the user's credit card, or a process of displaying a two-dimensional code and performing cashless payment.
- the computer 10 starts using the robot 20 (S16) and receives a command to the robot 20.
- the computer 10 executes the login process (S17). Since the robot 20 operating in the second mode operates based on a command of a specific computer registered in advance, such an authentication process is required. If the login is successful (S18: YES), the computer 10 starts using the robot 20 (S16) and receives a command to the robot 20. If the login is not successful (S18: NO), the computer 10 does not permit the use of the robot 20 and ends the process.
Landscapes
- Business, Economics & Management (AREA)
- Engineering & Computer Science (AREA)
- Strategic Management (AREA)
- Accounting & Taxation (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Marketing (AREA)
- Theoretical Computer Science (AREA)
- Development Economics (AREA)
- General Business, Economics & Management (AREA)
- Economics (AREA)
- Finance (AREA)
- Tourism & Hospitality (AREA)
- Entrepreneurship & Innovation (AREA)
- Human Resources & Organizations (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Operations Research (AREA)
- Quality & Reliability (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Human Computer Interaction (AREA)
- Audiology, Speech & Language Pathology (AREA)
- Multimedia (AREA)
- Primary Health Care (AREA)
- Data Mining & Analysis (AREA)
- Game Theory and Decision Science (AREA)
- Manipulator (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
Abstract
ロボットを活用しやすいコミュニケーションシステム及びロボットを提供する。コミュニケーションシステム100は、固定されていないロボット20,21,22と、ロボットと通信可能な複数のコンピュータ10,11とを備えるコミュニケーションシステムであって、ロボットは、カメラと、複数のコンピュータのうち不特定のコンピュータの指令に基づいて動作する第1モード及び複数のコンピュータのうちユーザ認証された特定のコンピュータの指令に基づいて動作する第2モードを切り替えるモード切り替え部と、を有し、コンピュータは、ロボットに対する指令を入力する入力部と、カメラで撮影された画像を表示する表示部と、を有する。
Description
本出願は、2019年10月8日に出願された日本特許出願番号2019-185243号に基づくもので、ここにその記載内容を援用する。
本発明は、コミュニケーションシステム及びロボットに関する。
近年、インターネットを用いたテレビ会議システムが普及し、顔を見ながら話すだけでなく、遠隔地にいるユーザがカメラの向きや位置を操作することができるテレプレゼンスロボットが使用されている。
例えば、下記特許文献1には、遠隔操作者に対して撮影画像を提供するカメラと、撮影画像内の少なくとも一部を遠隔操作者から隠蔽するマスク処理を実行し、かつ、マスク処理を用途に応じて切り替えるマスク処理部と、を備えるカメラ付き移動体が記載されている。
例えば、下記特許文献1には、遠隔操作者に対して撮影画像を提供するカメラと、撮影画像内の少なくとも一部を遠隔操作者から隠蔽するマスク処理を実行し、かつ、マスク処理を用途に応じて切り替えるマスク処理部と、を備えるカメラ付き移動体が記載されている。
従来のテレプレゼンスロボットは、ログイン等の認証処理を経て使用が開始されるものであり、権限を持たないユーザが用いることはできない。このようなロボットは、所有者の資産であるが、用途が限定されているため非稼働時間が長くなることがあり、活用が難しい場合がある。
そこで、本発明は、ロボットを活用しやすいコミュニケーションシステム及びロボットを提供する。
本発明の一態様に係るコミュニケーションシステムは、固定されていないロボットと、ロボットと通信可能な複数のコンピュータとを備えるコミュニケーションシステムであって、ロボットは、カメラと、複数のコンピュータのうち不特定のコンピュータの指令に基づいて動作する第1モード及び複数のコンピュータのうちユーザ認証された特定のコンピュータの指令に基づいて動作する第2モードを切り替えるモード切り替え部と、を有し、コンピュータは、ロボットに対する指令を入力する入力部と、カメラで撮影された画像を表示する表示部と、を有する。
この態様によれば、ロボットの第1モードと第2モートとが切替可能であることで、第2モードとして所有者が使用しつつ、所有者が使用しない空き時間に第1モードとして公開し、不特定のユーザがロボットを操作できるようにして、その対価を得ることができる。また、ロボットを第1モードとして公開し、所有者が不特定のユーザとコミュニケーションを取ることもできる。このようにして、ロボットをより有効に活用することができる。
上記態様において、第1モードで動作するロボットは、複数のコンピュータから事前予約を受け付け、予約された期間に、当該予約を行ったコンピュータの指令に基づいて動作してもよい。
この態様によれば、ロボットを不特定のユーザに時間貸しして、資産として活用することができる。
上記態様において、複数のロボットを備え、表示部は、複数のロボットのうち第1モードで動作するロボットを一覧表示し、入力部は、第1モードで動作するロボットのうちいずれかの選択を受け付け、選択されたロボットに対する指令を入力してもよい。
この態様によれば、不特定のユーザが用いることのできるロボットを一目で把握することができ、ロボットの利用を促進し、ロボットがより活用されるようにすることができる。
上記態様において、複数のロボットを備え、表示部は、複数のロボットのうち第1モードで動作するロボット及び複数のロボットのうちユーザ認証された第2モードで動作するロボットを一覧表示し、入力部は、第1モードで動作するロボットのうちいずれか又は第2モードで動作するロボットのうちいずれかの選択を受け付け、選択されたロボットに対する指令を入力してもよい。
この態様によれば、不特定のユーザが用いることのできるロボット及び事前登録したロボットを一目で把握することができ、ロボットの利用を促進し、ロボットがより活用されるようにすることができる。
本発明の他の態様に係るロボットは、カメラと、遠隔操作可能な駆動部と、を有する移動型又は装着型のロボットであって、第1モード及び第2モードを切り替えるモード切り替え部と、第1モードが設定されているとき、複数のコンピュータのうち不特定のコンピュータからの指令を受け付け、第2モードが設定されているとき、複数のコンピュータのうちユーザ認証された特定のコンピュータからの指令を受け付ける受付部と、受け付けた指令に応じて、駆動部の制御を行う制御部と、カメラで取得した画像を、指令を入力したコンピュータに送信する送信部と、を備える。
この態様によれば、ロボットの第1モードと第2モートとが切替可能であることで、第2モードとして所有者が使用しつつ、所有者が使用しない空き時間に第1モードとして公開し、不特定のユーザがロボットを操作できるようにして、その対価を得ることができる。また、ロボットを第1モードとして公開し、所有者が不特定のユーザとコミュニケーションを取ることもできる。このようにして、ロボットをより有効に活用することができる。
本発明によれば、ロボットを活用しやすいコミュニケーションシステム及びロボットを提供することができる。
添付図面を参照して、本発明の実施形態について説明する。なお、各図において、同一の符号を付したものは、同一又は同様の構成を有する。
図1は、本発明の実施形態に係るコミュニケーションシステム100のネットワーク構成を示す図である。コミュニケーションシステム100は、固定されていないロボット20,21,22と、ロボット20,21,22と通信可能な複数のコンピュータ10,11とを備える。ここで、ロボット20,21,22とコンピュータ10,11が通信可能とは、無線通信又は有線通信が可能であることを含み、インターネットやLAN(Local Area Network)による通信が可能であったり、近距離無線通信が可能であったりする場合を含む。なお、本実施形態では、3台のロボット20,21,22と、2台のコンピュータ10,11とを例示しているが、その台数は任意である。
ロボット20,21,22は、カメラと、複数のコンピュータ10,11のうち不特定のコンピュータの指令に基づいて動作する第1モードM1及び複数のコンピュータ10,11のうちユーザ認証された特定のユーザが使用するコンピュータの指令に基づいて動作する第2モードM2を切り替えるモード切り替え部と、を有する。なお、「不特定のコンピュータ」は、ロボット20、21、22を操作するための専用サイトにアクセスしたコンピュータであってもよいし、ロボット20、21、22を操作するためのアプリケーションがインストールされたコンピュータや、ロボット20、21、22を利用するためのユーザ登録が予めされたコンピュータであってもよい。ロボット20,21,22は、例えばテレプレゼンスロボット又はアバターロボットで構成され、車輪等の移動部を有していてよい。図1に示す例では、ロボット20は、第2モードM2で動作しており、ユーザ認証されたユーザが使用するコンピュータ10からの指令のみ受け付ける。一方、ロボット21,22は、第1モードM1で動作しており、全てのコンピュータ10,11からの指令を受け付ける。
第1モードM1で動作するロボット21,22は、ユーザ認証不要でコンピュータ10,11からの指令に基づいて動作する。もっとも、複数のコンピュータから同時に指令を受け付けると、指令が錯綜するため、第1モードM1で動作するロボット21,22は、事前予約を受け付けて、予約したユーザが使用するコンピュータの指令に基づいて動作するようにしてよい。一方、第2モードM2で動作するロボット20は、ユーザ認証に成功したコンピュータ10からの指令に基づいて動作する。ここで、ユーザ認証は、公知の手法(例えば、ユーザ名とパスワード、生体認証等)で行われてよく、ユーザ認証のための情報は、事前に登録されていてよい。第2モードM2で動作するロボット20に関しても、ユーザ認証に成功したユーザのうち事前予約したユーザが使用するコンピュータの指令に基づいて動作するようにしてもよい。第1モードM1で動作するロボット21,22は、ユーザ認証が不要な、すなわち、特別なアクセス権限が必要ないパブリックモードで動作するロボットであり、第2モードM2で動作するロボット20は、ユーザ認証が必要な、すなわち、特別なアクセス権限が必要であるプライベートモードで動作するロボットである(アクセス権限を確認する手段がユーザ認証である)。なお、特別なアクセス権限は、段階的に設けても良い。例えば、特別なアクセス権限として、第1のアクセス権限と、第1のアクセス権限よりさらに特別な第2のアクセス権限とを設けてもよい。この場合、第1のアクセス権限を有する(第1のユーザ認証に成功した)第1のユーザが使用するコンピュータの指令よりも、第2のアクセス権限を有する(第2のユーザ認証に成功した)第2のユーザ(例えば、ロボット20、21、22の所有者や管理者)が使用するコンピュータの指令を優先させたり、第2のユーザが使用するコンピュータにロボット20、21、22の各種設定やアクセス権限自体を変更する権限を与えたりしてもよい。
ロボット20,21,22が固定されていないとは、ロボット20,21,22が車輪等の移動部を有する移動型である場合と、人が装着でき、マニピュレータ等の駆動部を有する装着型である場合とを含む。移動型のロボットは、例えば特許文献1に示されている。移動型ロボットの移動部は、一輪、二輪又は多輪により走行するもの、キャタピラにより走行するもの、レールの上を走行するもの、飛び跳ねて移動するもの、二足歩行、四足歩行又は多足歩行するもの、スクリューにより水上又は水中を航行するもの及びプロペラ等により飛行するものを含む。装着型のロボットは、例えばMHD Yamen Saraiji, Tomoya Sasaki, Reo Matsumura, Kouta Minamizawa and Masahiko Inami, "Fusion: full body surrogacy for collaborative communication," Proceeding SIGGRAPH '18 ACM SIGGRAPH 2018 Emerging Technologies Article No. 7.にて公開されている。さらに、ロボット20,21,22は、自動走行又は半自動走行可能な車両や重機であったり、ドローンや飛行機であったりを含む。また、ロボット20,21,22は、スポーツスタジアム等に設置され、レールの上を移動可能なカメラを備えたロボットを含む。また、ロボット20,21,22は、宇宙空間に打ち上げられる衛星型ロボットであって、姿勢制御やカメラの撮影方向の制御が可能なロボットを含む。
ロボット20,21,22のモード切り替え部は、物理的なスイッチにより実現されてもよいし、ソフトウェアによって実現されてもよい。物理的なスイッチによってモード切り替え部を実現する場合、ロボット20,21,22に設けられたスイッチを切り替えることで、第1モードM1と第2モードM2を切り替えることができる。また、ソフトウェアによってモード切り替え部を実現する場合、ユーザ認証処理を行い、ユーザ認証に成功したユーザによって、ロボット20,21,22に設けられた入力部の操作が行われて第1モードM1と第2モードM2とが切り替えられたり、ユーザ認証に成功したコンピュータからの指令によって、第1モードM1と第2モードM2とが切り替えられたりする。ユーザのアクセス権限(認証処理)が段階的に設けられている場合、例えば、第1のアクセス権限(第1のユーザ認証処理)と、第1のアクセス権限よりも特別な第2のアクセス権限(第2のユーザ認証処理)が設けられている場合、第2のアクセス権限を有するユーザのコンピュータ(第2のユーザ認証に成功したコンピュータ)からの指令によってのみ、第1モードM1と第2モードM2とを切り替えるようにしてもよい。ソフトウェアによってモード切り替え部を実現する場合、ロボット20,21,22の管理者が、遠隔地にいながら第1モードM1と第2モードM2とを切り替えることができる。
コンピュータ10,11は、ロボット20,21,22に対する指令を入力する入力部と、ロボット20,21,22のカメラで撮影された画像を表示する表示部と、を有する。コンピュータ10,11は、例えばスマートフォンで構成されるが、パーソナルコンピュータ等で構成されてもよい。コンピュータ10,11のユーザは、ロボット20,21,22を介して、ロボット20,21,22が配置されている遠隔地にいる他のユーザとコミュニケーションをとることができる。
本実施形態に係るコミュニケーションシステム100によれば、ロボット20,21,22の第1モードM1と第2モートM2とが切替可能であることで、第2モードM2として特定のユーザが使用しつつ、特定のユーザが使用しない空き時間に第1モードM1として公開し、不特定のユーザがロボット20,21,22をシェアリングできるようになる。このとき、特定のユーザがその対価を得られるようにしてもよい。また、ロボット20,21,22を第1モードM1として公開し、所有者が不特定のユーザとコミュニケーションを取ることもできる。このようにして、ロボット20,21,22をより有効に活用することができる。
以下、コンピュータ10,11を総称してコンピュータ10と呼ぶ。また、ロボット20,21,22を総称してロボット20と呼ぶ。
図2は、本実施形態に係るコンピュータ10の物理的構成を示す図である。コンピュータ10は、演算部に相当するCPU(Central Processing Unit)10aと、記憶部に相当するRAM(Random Access Memory)10bと、記憶部に相当するROM(Read only Memory)10cと、通信部10dと、入力部10eと、表示部10fと、を有する。これらの各構成は、バスを介して相互にデータ送受信可能に接続される。なお、本例ではコンピュータ10が一台のコンピュータで構成される場合について説明するが、コンピュータ10は、複数のコンピュータが組み合わされて実現されてもよい。また、図2で示す構成は一例であり、コンピュータ10はこれら以外の構成を有してもよいし、これらの構成のうち一部を有さなくてもよい。
CPU10aは、RAM10b又はROM10cに記憶されたプログラムの実行に関する制御やデータの演算、加工を行う制御部である。CPU10aは、ロボットを介したコミュニケーションを制御するプログラム(コミュニケーションプログラム)を実行する演算部である。CPU10aは、入力部10eや通信部10dから種々のデータを受け取り、データの演算結果を表示部10fに表示したり、RAM10bに格納したりする。
RAM10bは、記憶部のうちデータの書き換えが可能なものであり、例えば半導体記憶素子で構成されてよい。RAM10bは、CPU10aが実行するプログラム、ユーザ情報といったデータを記憶してよい。なお、これらは例示であって、RAM10bには、これら以外のデータが記憶されていてもよいし、これらの一部が記憶されていなくてもよい。
ROM10cは、記憶部のうちデータの読み出しが可能なものであり、例えば半導体記憶素子で構成されてよい。ROM10cは、例えばコミュニケーションプログラムや、書き換えが行われないデータを記憶してよい。
通信部10dは、コンピュータ10を他の機器に接続するインターフェースである。通信部10dは、インターネット等の通信ネットワークに接続されてよい。
入力部10eは、ユーザからデータの入力を受け付けるものであり、例えば、キーボード及びタッチパネルを含んでよい。また、入力部10eは、音声入力のためのマイクを含んでよい。
表示部10fは、CPU10aによる演算結果を視覚的に表示するものであり、例えば、LCD(Liquid Crystal Display)により構成されてよい。表示部10fは、ロボット20のカメラ20hで撮影された画像を表示してよい。
コミュニケーションプログラムは、RAM10bやROM10c等のコンピュータによって読み取り可能な記憶媒体に記憶されて提供されてもよいし、通信部10dにより接続される通信ネットワークを介して提供されてもよい。コンピュータ10では、CPU10aがコミュニケーションプログラムを実行することにより、ロボット20を制御するための様々な動作が実現される。なお、これらの物理的な構成は例示であって、必ずしも独立した構成でなくてもよい。例えば、コンピュータ10は、CPU10aとRAM10bやROM10cが一体化したLSI(Large-Scale Integration)を備えていてもよい。
図3は、本実施形態に係るロボット20の物理的構成を示す図である。ロボット20は、演算部に相当するCPU20aと、記憶部に相当するRAM20bと、記憶部に相当するROM20cと、通信部20dと、入力部20eと、表示部20fと、駆動部20gと、カメラ20hとを有する。これらの各構成は、バスを介して相互にデータ送受信可能に接続される。なお、図3で示す構成は一例であり、ロボット20はこれら以外の構成を有してもよいし、これらの構成のうち一部を有さなくてもよい。
CPU20aは、RAM20b又はROM20cに記憶されたプログラムの実行に関する制御やデータの演算、加工を行う制御部である。CPU20aは、ロボットを介したコミュニケーションを制御するプログラム(コミュニケーションプログラム)を実行する演算部である。CPU20aは、入力部20eや通信部20dから種々のデータを受け取り、データの演算結果を表示部20fに表示したり、RAM20bに格納したりする。また、CPU20aは、駆動部20gを制御し、ロボット20の動作を制御する。
RAM20bは、記憶部のうちデータの書き換えが可能なものであり、例えば半導体記憶素子で構成されてよい。RAM20bは、CPU20aが実行するプログラムを記憶してよい。なお、これらは例示であって、RAM20bには、これら以外のデータが記憶されていてもよいし、これらの一部が記憶されていなくてもよい。
ROM20cは、記憶部のうちデータの読み出しが可能なものであり、例えば半導体記憶素子で構成されてよい。ROM20cは、例えばコミュニケーションプログラムや、書き換えが行われないデータを記憶してよい。
通信部20dは、ロボット20を他の機器に接続するインターフェースである。通信部20dは、インターネット等の通信ネットワークに接続されてよい。
入力部20eは、ユーザからデータの入力を受け付けるものであり、例えば、タッチパネルを含んでよい。また、入力部20eは、音声入力のためのマイクを含んでよい。
表示部20fは、CPU20aによる演算結果を視覚的に表示するものであり、例えば、LCDにより構成されてよい。コンピュータ10がカメラを備える場合、表示部20fは、コンピュータ10のカメラで撮影された画像を表示してもよい。
駆動部20gは、遠隔操作可能なアクチュエータを含み、車輪等の移動部やマニピュレータ等を含む。ロボット20が移動型のロボットである場合、駆動部20gは、少なくとも車輪等の移動部を含むが、マニピュレータを含んでもよい。ロボット20が装着型である場合、駆動部20gは、少なくともマニピュレータを含む。
カメラ20hは、静止画又は動画を撮像する撮像素子を含み、撮像した静止画又は動画を、通信部20dを介してコンピュータ10に送信する。
コミュニケーションプログラムは、RAM20bやROM20c等のコンピュータによって読み取り可能な記憶媒体に記憶されて提供されてもよいし、通信部20dにより接続される通信ネットワークを介して提供されてもよい。ロボット20では、CPU20aがコミュニケーションプログラムを実行することにより、ロボット20を制御するための様々な動作が実現される。なお、これらの物理的な構成は例示であって、必ずしも独立した構成でなくてもよい。例えば、ロボット20は、CPU20aとRAM20bやROM20cが一体化したLSIを備えていてもよい。
図4は、本実施形態に係るコンピュータ10に表示される第1画面例を示す図である。第1画面例は、ロボット20を使用するための事前予約を受け付ける画面例である。同図のうち「プライベート使用」と示されている時間帯は、そのロボットが第2モードで動作する時間帯であり、「予約済」と示されている時間帯は、そのロボットが第1モードで動作し、既にユーザにより使用の事前予約がされている時間帯である。また、空白の時間帯は、そのロボットが第1モードで動作し、事前予約がされていない時間帯である。
第1モードで動作するロボット20は、複数のコンピュータ10から事前予約を受け付け、予約された期間に、当該予約を行ったコンピュータ10の指令に基づいて動作する。これにより、ロボット20を不特定のユーザに時間貸しして、資産として活用することができる。なお、第1モードで動作するロボット20が事前予約したコンピュータ10の指令に基づいて動作する場合、他の予約していないコンピュータに対して、ロボット20のカメラで撮影している画像を共有したり、マイクで取得している音声を共有したりしてもよい。
表示部10fは、複数のロボット20のうち第1モードで動作するロボット20を一覧表示する。本例の場合、東京に配置されている第1ロボットは、11時以降の時間帯について第1モードで動作し、ニューヨークに配置されている第2ロボットは、9時以降の時間帯について第1モードで動作している。入力部10eは、第1モードで動作するロボット20のうちいずれかの選択を受け付け、選択されたロボット20に対する指令を入力する。例えば、第1ロボットを11時から11時半まで使用する事前予約を行った場合、その時間帯に入力部10eによって第1ロボットに対する指令を入力する。このようにして、不特定のユーザが用いることのできるロボット20を一目で把握することができ、ロボット20の利用を促進し、ロボット20がより活用されるようにすることができる。
また、表示部10fは、複数のロボット20のうち第1モードで動作するロボット20及び複数のロボット20のうち事前登録した第2モードで動作するロボット20を一覧表示する。本例の場合、東京に配置されている第1ロボットは、9時から11時までの時間帯について「プライベート使用」と示され、第2モードで動作している。入力部10eは、第1モードで動作するロボット20のうちいずれか又は第2モードで動作するロボット20のうちいずれかの選択を受け付け、選択されたロボット20に対する指令を入力する。このようにして、不特定のユーザが用いることのできるロボット20及び事前登録したロボット20を一目で把握することができ、ロボット20の利用を促進し、ロボット20がより活用されるようにすることができる。
図5は、本実施形態に係るコンピュータ10に表示される第2画面例を示す図である。第2画面例は、ロボット20の使用を開始する前に、コンテンツを選択するための画面例である。本例では、定額コンテンツと販売コンテンツが選択可能となっている。
定額コンテンツは、ロボット20の所有者が予め用意したコンテンツであり、例えば、ロボット20の所有者との対話、ロボット20が配置された施設の見学、ロボット20を用いたアクティビティ等を含む。本例では、定額コンテンツの価格は「¥1,000」となっている。なお、定額コンテンツの価格は、ロボット20を使用する時間に応じて変動してもよい。
販売コンテンツは、コンテンツプラットフォームで販売されているコンテンツであり、様々なユーザが作成したコンテンツが含まれ得る。コンテンツプラットフォームは、スマートフォンにアプリケーションをダウンロードするためのプラットフォームと類似するものであり、様々なユーザが、ロボット20を用いたコンテンツを登録、販売する。
このように、ロボット20を第1モードとして公開し、不特定のユーザが用いることができるようにすることで、所有者が収益を得る機会を増やしたり、コンテンツ作成者が収益を得る機会を与えたりすることができ、ロボット20をより有効に活用することができるようになる。
図6は、本実施形態に係るコンピュータ10により実行される処理のフローチャートである。はじめに、コンピュータ10は、複数のロボット20のうち第1モードで動作するロボット20及び第2モードで動作するロボット20を一覧表示する(S10)。そして、コンピュータ10は、第1モード又は第2モードで動作するロボット20のうちいずれかの選択を受け付ける(S11)。
第1モードで動作するロボット20が選択された場合(S12:YES)、コンピュータ10は、第1モードで動作するロボット20の事前予約を受け付け(S13)、コンテンツの選択を受け付ける(S14)。そして、コンテンツの使用料請求処理を行う(S15)。使用料請求処理は、例えば、ユーザのクレジットカードを用いて使用料を請求する処理であったり、2次元コードを表示して、キャッシュレス決済を行う処理であったりしてよい。その後、コンピュータ10は、ロボット20の使用を開始し(S16)、ロボット20に対する指令を受け付ける。
一方、第1モードで動作するロボット20が選択されなかった場合(S12:NO)、すなわち第2モードで動作するロボット20が選択された場合、コンピュータ10は、ログイン処理を実行する(S17)。第2モードで動作するロボット20は、事前登録された特定のコンピュータの指令に基づいて動作するため、このような認証処理を必要とする。ログインに成功した場合(S18:YES)、コンピュータ10は、ロボット20の使用を開始し(S16)、ロボット20に対する指令を受け付ける。また、ログインに成功しない場合(S18:NO)、コンピュータ10は、ロボット20の使用を許可せず、処理を終了する。
以上説明した実施形態は、本発明の理解を容易にするためのものであり、本発明を限定して解釈するためのものではない。実施形態が備える各要素並びにその配置、材料、条件、形状及びサイズ等は、例示したものに限定されるわけではなく適宜変更することができる。また、異なる実施形態で示した構成同士を部分的に置換し又は組み合わせることが可能である。
10,11…コンピュータ、10a…CPU、10b…RAM、10c…ROM、10d…通信部、10e…入力部、10f…表示部、20,21,22…ロボット、20a…CPU、20b…RAM、20c…ROM、20d…通信部、20e…入力部、20f…表示部、20g…駆動部、20h…カメラ、100…コミュニケーションシステム
Claims (16)
- 固定されていないロボットと、前記ロボットと通信可能な複数のコンピュータとを備えるコミュニケーションシステムであって、
前記ロボットは、
カメラと、
前記複数のコンピュータのうち特別なアクセス権限のないコンピュータの指令に基づいて動作する第1モード及び前記複数のコンピュータのうち特別なアクセス権限のある特定のコンピュータの指令に基づいて動作する第2モードを切り替えるモード切り替え部と、を有し、
前記コンピュータは、
前記ロボットに対する指令を入力する入力部と、
前記カメラで撮影された画像を表示する表示部と、を有する、
コミュニケーションシステム。 - 前記第1モードで動作する前記ロボットは、前記複数のコンピュータから事前予約が受け付けられると、予約された期間に、当該事前予約を行ったコンピュータの指令に基づいて動作する、
請求項1に記載のコミュニケーションシステム。 - 前記第1モードで動作する前記ロボットは、前記複数のコンピュータからコンテンツの選択が受け付けられるとともに、前記コンテンツの使用料の請求処理が行われると、当該使用料を支払ったコンピュータの指令に基づいて動作する、
請求項1または請求項2のいずれかに記載のコミュニケーションシステム。 - 前記コンテンツは、前記ロボットの所有者が予め用意したコンテンツである、
請求項3に記載のコミュニケーションシステム。 - 前記コンテンツは、コンテンツプラットフォームで販売されているコンテンツである、
請求項3または請求項4のいずれかに記載のコミュニケーションシステム。 - 複数の前記ロボットを備え、
前記表示部は、複数の前記ロボットのうち前記第1モードで動作する前記ロボットを一覧表示し、
前記入力部は、前記第1モードで動作する前記ロボットのうちいずれかの選択を受け付け、選択された前記ロボットに対する指令を入力する、
請求項1から請求項5のいずれか一項に記載のコミュニケーションシステム。 - 複数の前記ロボットを備え、
前記表示部は、複数の前記ロボットのうち前記第1モードで動作する前記ロボット及び複数の前記ロボットのうちユーザ認証された前記第2モードで動作する前記ロボットを一覧表示し、
前記入力部は、前記第1モードで動作する前記ロボットのうちいずれか又は前記第2モードで動作する前記ロボットのうちいずれかの選択を受け付け、選択された前記ロボットに対する指令を入力する、
請求項1から請求項6のいずれか一項に記載のコミュニケーションシステム。 - 前記第1モードと前記第2モードとの切り替えは、前記ロボットに設けられたスイッチ又は入力部へのユーザの操作に基づくものである、
請求項1から請求項7のいずれか一項に記載のコミュニケーションシステム。 - 前記第1モードと前記第2モードとの切り替えは、前記特定のコンピュータからの指令に基づくものである、
請求項1から請求項8のいずれか一項に記載のコミュニケーションシステム。 - カメラと、
遠隔操作可能な駆動部と、を有する移動型又は装着型のロボットであって、
第1モード及び第2モードを切り替えるモード切り替え部と、
前記第1モードが設定されているとき、複数のコンピュータのうち特別なアクセス権限のない不特定のコンピュータからの指令を受け付け、前記第2モードが設定されているとき、前記複数のコンピュータのうち特別なアクセス権限のある特定のコンピュータからの指令を受け付ける受付部と、
前記受け付けた指令に応じて、前記駆動部の制御を行う制御部と、
前記カメラで取得した画像を、前記指令を入力したコンピュータに送信する送信部と、
を備えるロボット。 - 前記第1モードで動作する前記ロボットは、前記複数のコンピュータからユーザ認証なしに事前予約が受け付けられると、予約された期間に、当該事前予約を行ったコンピュータの指令に基づいて動作する、
請求項10に記載のロボット。 - 前記第1モードで動作する前記ロボットは、前記複数のコンピュータからコンテンツの選択が受け付けられるとともに、前記コンテンツの使用料の請求処理が行われると、当該使用料を支払ったコンピュータの指令に基づいて動作する、
請求項10または請求項11のいずれかに記載のロボット。 - 前記コンテンツは、前記ロボットの所有者が予め用意したコンテンツである、
請求項12に記載のロボット。 - 前記コンテンツは、コンテンツプラットフォームで販売されているコンテンツである、
請求項12または請求項13のいずれかに記載のロボット。 - 前記第1モードと前記第2モードとの切り替えは、当該ロボットに設けられたスイッチ又は入力部へのユーザの操作に基づくものである、
請求項10から請求項14のいずれか一項に記載のロボット。 - 前記第1モードと前記第2モードとの切り替えは、ユーザ認証された前記特定のコンピュータからの指令に基づくものである、
請求項10から15のいずれか一項に記載のロボット。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP20874954.9A EP4044076A4 (en) | 2019-10-08 | 2020-09-24 | COMMUNICATION SYSTEM AND ROBOTS |
| US17/767,381 US20240386335A1 (en) | 2019-10-08 | 2020-09-24 | Communication system and robot |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019185243A JP2022169822A (ja) | 2019-10-08 | 2019-10-08 | コミュニケーションシステム及びロボット |
| JP2019-185243 | 2019-10-08 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021070621A1 true WO2021070621A1 (ja) | 2021-04-15 |
Family
ID=75437266
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/036016 Ceased WO2021070621A1 (ja) | 2019-10-08 | 2020-09-24 | コミュニケーションシステム及びロボット |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20240386335A1 (ja) |
| EP (1) | EP4044076A4 (ja) |
| JP (1) | JP2022169822A (ja) |
| WO (1) | WO2021070621A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023079901A1 (ja) * | 2021-11-02 | 2023-05-11 | avatarin株式会社 | サーバ装置、配信システム及びその制御方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009034807A (ja) * | 2007-08-02 | 2009-02-19 | Robotis Co Ltd | ネットワーク基盤のロボットコンテンツ取引システム及び方法 |
| WO2017122278A1 (ja) * | 2016-01-12 | 2017-07-20 | 楽天株式会社 | 情報提供システム、情報提供方法、及びプログラム |
| WO2018058338A1 (en) * | 2016-09-27 | 2018-04-05 | SZ DJI Technology Co., Ltd. | Component and user management for uav systems |
| JP2019062308A (ja) | 2017-09-25 | 2019-04-18 | 富士ゼロックス株式会社 | カメラ付き移動体、カメラ付き移動体制御システム、及びプログラム |
| JP2019185243A (ja) | 2018-04-05 | 2019-10-24 | アビームコンサルティング株式会社 | モータスポーツにおける自動音声回答システム及びプログラム |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002101333A (ja) * | 2000-09-26 | 2002-04-05 | Casio Comput Co Ltd | 遠隔制御装置および遠隔操作サービスシステム並びにそれらのプログラム記録媒体 |
| WO2011109301A1 (en) * | 2010-03-01 | 2011-09-09 | Relayrides, Inc. | Car sharing |
| US10325298B2 (en) * | 2013-01-22 | 2019-06-18 | General Electric Company | Systems and methods for a non-destructive testing ecosystem |
| US9305407B1 (en) * | 2015-01-28 | 2016-04-05 | Mtct Group Llc | Method for fleet management |
| US10568063B2 (en) * | 2016-11-30 | 2020-02-18 | Cisco Technology, Inc. | Precise UAV tracking in 3-D space |
| JP2019008585A (ja) * | 2017-06-26 | 2019-01-17 | 富士ゼロックス株式会社 | ロボット制御システム |
| KR102370493B1 (ko) * | 2017-10-30 | 2022-03-04 | 현대자동차주식회사 | 로봇을 이용한 공유 모빌리티 시스템 및 제어방법 |
| US11137757B2 (en) * | 2018-03-23 | 2021-10-05 | Ford Global Technologies, Llc | Method and apparatus for selective drive-mode enablement |
-
2019
- 2019-10-08 JP JP2019185243A patent/JP2022169822A/ja active Pending
-
2020
- 2020-09-24 WO PCT/JP2020/036016 patent/WO2021070621A1/ja not_active Ceased
- 2020-09-24 EP EP20874954.9A patent/EP4044076A4/en active Pending
- 2020-09-24 US US17/767,381 patent/US20240386335A1/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009034807A (ja) * | 2007-08-02 | 2009-02-19 | Robotis Co Ltd | ネットワーク基盤のロボットコンテンツ取引システム及び方法 |
| WO2017122278A1 (ja) * | 2016-01-12 | 2017-07-20 | 楽天株式会社 | 情報提供システム、情報提供方法、及びプログラム |
| WO2018058338A1 (en) * | 2016-09-27 | 2018-04-05 | SZ DJI Technology Co., Ltd. | Component and user management for uav systems |
| JP2019062308A (ja) | 2017-09-25 | 2019-04-18 | 富士ゼロックス株式会社 | カメラ付き移動体、カメラ付き移動体制御システム、及びプログラム |
| JP2019185243A (ja) | 2018-04-05 | 2019-10-24 | アビームコンサルティング株式会社 | モータスポーツにおける自動音声回答システム及びプログラム |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4044076A4 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023079901A1 (ja) * | 2021-11-02 | 2023-05-11 | avatarin株式会社 | サーバ装置、配信システム及びその制御方法 |
| JP2023068378A (ja) * | 2021-11-02 | 2023-05-17 | avatarin株式会社 | サーバ装置、配信システム及びその制御方法 |
| JP7780915B2 (ja) | 2021-11-02 | 2025-12-05 | avatarin株式会社 | サーバ装置、配信システム及びその制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4044076A4 (en) | 2023-10-25 |
| JP2022169822A (ja) | 2022-11-10 |
| US20240386335A1 (en) | 2024-11-21 |
| EP4044076A1 (en) | 2022-08-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7686704B2 (ja) | ロッカー管理法 | |
| JP2002101333A (ja) | 遠隔制御装置および遠隔操作サービスシステム並びにそれらのプログラム記録媒体 | |
| CN102243590A (zh) | 用于在外部设备上的应用程序和车辆系统之间通信的方法 | |
| JP6564484B1 (ja) | 同室感コミュニケーションシステム | |
| CN109552214A (zh) | 用于汽车个性化的系统、装置及方法 | |
| JP2017147555A (ja) | 情報端末、プログラム、通信制御方法、通信システム | |
| US12456084B2 (en) | System and method for improving interactions performed in a virtual environment | |
| JP6726348B1 (ja) | コミュニケーションシステム及びロボット | |
| JP2017034530A (ja) | 通信管理システム、通信システム、通信管理方法、及びプログラム | |
| US12251638B2 (en) | System and method for navigating through a dynamic virtual lounge within a metaverse | |
| KR20180133629A (ko) | 모바일 단말, 서비스 서버 및 이를 포함하는 원격 여행 서비스 제공 시스템 및 원격 여행 서비스 제공 방법 | |
| JP2025178371A (ja) | 権利判定システム、権利判定方法、情報処理端末およびその制御方法 | |
| JP7346830B2 (ja) | 通信端末、プログラム、表示方法、記録媒体、システム | |
| WO2021070621A1 (ja) | コミュニケーションシステム及びロボット | |
| JP6782799B2 (ja) | 顧客サービス引き継ぎ方法、非一時的記録媒体、及びサービスロボット | |
| JP2020060851A (ja) | 情報処理装置、情報処理システム、情報処理方法及びプログラム | |
| JP2020052917A (ja) | 表示端末、表示制御方法およびプログラム | |
| JP2023153304A (ja) | 通信端末、プログラム、表示方法、記録媒体 | |
| JP6837864B2 (ja) | 携帯端末、情報処理装置、情報処理方法、およびプログラム | |
| JP7809976B2 (ja) | 通信システム、通信方法、及びプログラム | |
| JP2001312512A (ja) | 情報配信システム、情報端末装置、情報センター、情報配信方法及び記憶媒体 | |
| US20250156511A1 (en) | Information processing apparatus, information processing method, and program | |
| JP7784665B2 (ja) | 処理装置、処理プログラム及び処理方法 | |
| JP7565987B2 (ja) | 通信装置、制御方法およびプログラム | |
| JP2023140160A (ja) | 通信端末、通信管理システム、遠隔操作移動装置、通信システム、遠隔操作方法、通信管理方法、制御方法、通信方法、及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20874954 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 17767381 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2020874954 Country of ref document: EP Effective date: 20220509 |
|
| NENP | Non-entry into the national phase |
Ref country code: JP |