WO2021192782A1 - 寸法計測方法及び寸法計測装置 - Google Patents
寸法計測方法及び寸法計測装置 Download PDFInfo
- Publication number
- WO2021192782A1 WO2021192782A1 PCT/JP2021/006668 JP2021006668W WO2021192782A1 WO 2021192782 A1 WO2021192782 A1 WO 2021192782A1 JP 2021006668 W JP2021006668 W JP 2021006668W WO 2021192782 A1 WO2021192782 A1 WO 2021192782A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- line segment
- dimension
- user
- line
- model
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images


















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/02—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C11/00—Photogrammetry or videogrammetry, e.g. stereogrammetry; Photographic surveying
- G01C11/02—Picture taking arrangements specially adapted for photogrammetry or photographic surveying, e.g. controlling overlapping of pictures
- G01C11/025—Picture taking arrangements specially adapted for photogrammetry or photographic surveying, e.g. controlling overlapping of pictures by scanning the object
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C11/00—Photogrammetry or videogrammetry, e.g. stereogrammetry; Photographic surveying
- G01C11/04—Interpretation of pictures
- G01C11/30—Interpretation of pictures by triangulation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T17/00—Three-dimensional [3D] modelling for computer graphics
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/12—Edge-based segmentation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/13—Edge detection
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
- G06T7/55—Depth or shape recovery from multiple images
- G06T7/564—Depth or shape recovery from multiple images from contours
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/60—Analysis of geometric attributes
- G06T7/62—Analysis of geometric attributes of area, perimeter, diameter or volume
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
- G06V10/44—Local feature extraction by analysis of parts of the pattern, e.g. by detecting edges, contours, loops, corners, strokes or intersections; Connectivity analysis, e.g. of connected components
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/74—Image or video pattern matching; Proximity measures in feature spaces
- G06V10/761—Proximity, similarity or dissimilarity measures
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/60—Type of objects
- G06V20/64—Three-dimensional [3D] objects
- G06V20/647—Three-dimensional [3D] objects by matching two-dimensional images to three-dimensional objects
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/63—Control of cameras or camera modules by using electronic viewfinders
- H04N23/633—Control of cameras or camera modules by using electronic viewfinders for displaying additional information relating to control or operation of the camera
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/64—Computer-aided capture of images, e.g. transfer from script file into camera, check of taken image quality, advice or proposal for image composition or decision on when to take image
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2210/00—Indexing scheme for image generation or computer graphics
- G06T2210/04—Architectural design, interior design
Definitions
- This disclosure relates to a dimensional measurement method and a dimensional measurement device.
- Patent Document 1 discloses a method of calculating a structure shape by performing point cloud measurement by a multi-viewpoint image measurement method based on a plurality of images.
- An object of the present disclosure is to provide a dimensional measurement method or a dimensional measurement device capable of reducing a processing amount.
- a line segment model which is a three-dimensional model of the target area represented by a line, is generated by using a plurality of images of the target area taken from a plurality of viewpoints. Using the line segment model, the dimensions of a predetermined location in the target area are calculated, and the calculated dimensions are output.
- the present disclosure can provide a dimensional measurement method or a dimensional measurement device capable of reducing the processing amount.
- FIG. 1 is a diagram showing an example of dimensional measurement according to an embodiment.
- FIG. 2 is a diagram showing an example of dimensional measurement according to the embodiment.
- FIG. 3 is a block diagram of the dimension measuring device according to the embodiment.
- FIG. 4 is a block diagram of the imaging unit according to the embodiment.
- FIG. 5 is a block diagram of the control unit according to the embodiment.
- FIG. 6 is a block diagram of the dimension measurement unit according to the embodiment.
- FIG. 7 is a sequence diagram of the dimension measurement process according to the embodiment.
- FIG. 8 is a diagram showing an example of image capture according to the embodiment.
- FIG. 9 is a flowchart of the line segment reconstruction process according to the embodiment.
- FIG. 10 is a schematic diagram for explaining the line segment reconstruction according to the embodiment.
- FIG. 10 is a schematic diagram for explaining the line segment reconstruction according to the embodiment.
- FIG. 11 is a schematic diagram for explaining the line segment reconstruction according to the embodiment.
- FIG. 12 is a schematic diagram for explaining the line segment reconstruction according to the embodiment.
- FIG. 13 is a diagram showing a screen example according to the embodiment.
- FIG. 14 is a diagram showing a screen example according to the embodiment.
- FIG. 15 is a diagram showing a screen example according to the embodiment.
- FIG. 16 is a diagram showing a screen example according to the embodiment.
- FIG. 17 is a diagram showing a screen example according to the embodiment.
- FIG. 18 is a flowchart of the dimension measurement process according to the embodiment.
- FIG. 19 is a diagram showing a screen example according to the embodiment.
- FIG. 20 is a diagram showing a screen example according to the embodiment.
- FIG. 21 is a flowchart of the dimension measurement process according to the embodiment.
- a line segment model which is a three-dimensional model of the target area represented by a line, is generated by using a plurality of images of the target area taken from a plurality of viewpoints. Using the line segment model, the dimensions of a predetermined location in the target area are calculated, and the calculated dimensions are output.
- the dimension measurement method can reduce the processing amount by calculating the dimension using the line segment model. For example, as compared with the case where the shape of the target area is represented by a point cloud, the amount of processing can be reduced by expressing only the edge of the target area with a line. Specifically, in the dimensional measurement method using a three-dimensional model in which not only the edge of the target area but also the surface of the target area is represented by a point cloud, in order to measure the edge of the target area, the edge from the three-dimensional model is used. It is necessary to extract only the point cloud that represents.
- the line segment model since the line segment model includes only the point cloud representing the edge of the target region, it is not necessary to extract the point cloud representing the edge. Further, the amount of data of the line segment model according to one aspect of the present disclosure is smaller than the amount of data of the three-dimensional model in which the surface of the target region is also represented by a point cloud.
- the dimension measurement method further displays a user interface including the line segment model, and the predetermined location is formed on a plurality of lines included in the line segment model designated by the user via the user interface. It may be decided based on.
- the user when the user selects a plurality of lines from the line segment model, the dimensions of a predetermined location based on the selected multiple lines are measured. Therefore, the user can easily measure the dimensions of the desired portion.
- the dimension may be the distance between two lines selected by the user via the user interface.
- the user when the user selects two lines from the line segment model, the distance between the two selected lines is measured. Therefore, the user can easily measure the dimensions of the desired portion.
- the dimension may be the distance between a line and a surface selected by the user via the user interface.
- the user when the user selects a plurality of lines from the line segment model, the distance between the line and the surface based on the selected multiple lines is measured. Therefore, the user can easily measure the dimensions of the desired portion.
- the surface may be a surface defined by two lines selected by the user via the user interface.
- the user can easily select the desired surface.
- the user may be presented with a message prompting the user to photograph the entire object.
- the dimension measurement method can generate a line segment model using an image of the entire object, so that the accuracy of the line segment model can be improved. Therefore, the dimension measurement method can improve the accuracy of the dimension measurement.
- the line may be a line segment.
- the dimension measurement method can improve the accuracy of the line segment model because a line segment model can be generated using a line segment having both ends without using a part that is cut off in the image.
- the dimension measuring device includes a processor and a memory, and the processor is represented by a line segment using a plurality of images obtained by photographing the target area using the memory.
- a line segment model which is a three-dimensional model of the target area, is generated, the dimensions of a predetermined location in the target area are calculated using the line segment model, and the calculated dimensions are output.
- the dimension measuring device can reduce the processing amount by calculating the dimension using the line segment model.
- the dimension measuring device includes an input interface, a processor, and an output interface.
- a plurality of images obtained by capturing the target area from a plurality of viewpoints are input to the input interface.
- the processor generates a three-dimensional model in which the target area is represented by a line based on a plurality of images.
- the processor calculates the dimensions of a predetermined location in the 3D model. The calculated dimensions are output from the output interface.
- a recording medium such as a system, method, integrated circuit, computer program or computer-readable CD-ROM, and the system, method, integrated circuit, computer program. And any combination of recording media may be realized.
- FIG. 1 and 2 are diagrams showing an example of dimensional measurement.
- FIG. 1 shows an example of a kitchen, for example, the height L1 of the kitchen counter and the distance L2 from the floor to the outlet are measured.
- both L1 and L2 are defined as the distance between a surface and a line.
- L1 is the distance between the floor (face) and one side (line) of the counter.
- FIG. 2 shows an example of the entrance, for example, the undercut L3 (distance between the floor and the lower side of the door) of the door, the width L4 of the tile, and the gap L5 of the door are measured.
- L3 is the distance between lines
- L4 and L5 are the distances between lines.
- the distance between the line and the line or the distance between the line and the surface is measured.
- FIG. 3 is a block diagram of the dimension measuring device 100 according to the present embodiment.
- the dimension measuring device 100 includes an imaging unit 200, a control unit 300, a dimension measuring unit 400, and a user interface 500.
- the dimension measuring device 100 is included in a mobile terminal such as a tablet terminal or a smartphone.
- the imaging unit 200 captures an image (moving image or still image).
- the control unit 300 controls the image pickup unit 200, the dimension measurement unit 400, and the user interface 500.
- the dimension measurement unit 400 generates a line segment model, which is a three-dimensional model represented by a line segment, by reconstructing the line segment using the image taken by the image pickup unit 200.
- the line segment model is a three-dimensional model obtained by removing shapes (for example, faces) other than line segments.
- the dimension measurement unit 400 measures the dimension (distance) of the portion designated by the user by using the line segment model.
- the three-dimensional model is a computer representation of the imaged measurement target.
- the three-dimensional model has, for example, position information of each three-dimensional location on the measurement target.
- the line segment model is not limited to the line segment, and may be a three-dimensional model represented by a line.
- the line is a line segment having both ends, a half straight line having only one end, a straight line having no end, or a combination thereof. Further, having no edge means, for example, that the image is cut off.
- the user interface 500 accepts user input.
- the user interface 500 presents information to the user.
- the user interface 500 is a display and a touch panel.
- the user interface 500 is not limited to this, and may be any user interface.
- the user interface 500 may include a microphone, a speaker, and the like.
- FIG. 4 is a block diagram showing the configuration of the imaging unit 200.
- the imaging unit 200 includes a camera 201 and a gantry 202.
- the camera 201 includes a storage unit 211, a control unit 212, an optical system 213, and an image sensor 214.
- the storage unit 211 stores an image or the like taken by the image sensor 214.
- the control unit 212 controls the storage unit 211, the optical system 213, and the image sensor 214.
- the optical system 213 includes a lens or the like that causes light to enter the image sensor 214.
- the image sensor 214 captures an image.
- the gantry 202 controls the shooting direction of the camera 201.
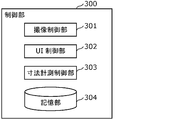
- FIG. 5 is a block diagram showing the configuration of the control unit 300.
- the control unit 300 includes an image pickup control unit 301, a UI control unit 302, a dimension measurement control unit 303, and a storage unit 304.
- the image pickup control unit 301 controls the image pickup unit 200.
- the UI control unit 302 controls the user interface 500.
- the dimension measurement control unit 303 controls the dimension measurement unit 400.
- the storage unit 304 stores an image taken by the image pickup unit 200, a line segment model generated by the dimension measurement unit 400, and the like.
- FIG. 6 is a block diagram showing the configuration of the dimension measurement unit 400.
- the dimension measurement unit 400 includes an image acquisition unit 401, a preprocessing unit 402, a line segment reconstruction unit 403, a plane estimation unit 404, and a measurement unit 405.
- the image acquisition unit 401 acquires a plurality of images taken by the image pickup unit 200.
- the preprocessing unit 402 preprocesses the acquired plurality of images.
- the line segment reconstruction unit 403 generates a line segment model by performing line segment reconstruction using a plurality of images after preprocessing.
- the plane estimation unit 404 estimates the plane included in the line segment model.
- the measuring unit 405 measures the distance between the line segments or the distance between the line segment and the surface by using the line segment model.
- FIG. 7 is a sequence diagram of the dimension measurement process in the dimension measurement device 100. This example is an example of measuring the distance between a line segment and a surface.
- the user gives an instruction to start shooting via the user interface (S11). For example, a start instruction is given by selecting a menu on the screen, starting an application, or the like.
- the control unit 300 When the control unit 300 receives the start instruction, the control unit 300 sends an imaging instruction to the imaging unit 200.
- the imaging unit 200 captures a plurality of images (still images) according to the imaging instruction (S12).
- the plurality of images (still images) obtained are two or more images of the same object (or target space) taken from different viewpoints.
- FIG. 8 is a diagram showing an example of capturing the plurality of images.
- a user uses a single imaging device (eg, a tablet terminal) to capture images of an object (eg, a kitchen) from different positions.
- the imaging unit 200 does not necessarily have to be included in the dimension measuring device 100, and may be included in a terminal different from the terminal including the dimension measuring device 100. In this case, the image taken by the imaging unit 200 is sent to the dimension measuring device 100 via an arbitrary communication means such as wireless communication.
- the plurality of images may be a plurality of images taken by a plurality of fixed cameras. Further, the plurality of images may be images of two viewpoints taken by a stereo camera from one position. Further, the plurality of images may be a plurality of frames included in a moving image taken while moving by a single camera. Further, the plurality of images may be a combination of these.
- the plurality of captured images are sent to the dimension measurement unit 400 via the control unit 300.
- the dimension measurement unit 400 generates a line segment model by performing line segment reconstruction using a plurality of images (S13).
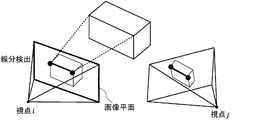
- FIG. 9 is a flowchart of the line segment reconstruction process (S13). Further, FIGS. 10 to 12 are schematic views for explaining the line segment reconstruction.
- the dimension measurement unit 400 detects a line segment included in each of the plurality of images (S31). Next, the dimension measurement unit 400 calculates the feature amount of each line segment (S32). Next, as shown in FIG. 11, the dimension measurement unit 400 uses the calculated feature amount to match line segments between images (S33). That is, the dimension measurement unit 400 detects a corresponding line segment which is a corresponding (same) line segment between images. Next, as shown in FIG. 12, the dimensional measurement unit 400 performs a geometric calculation using the relationship of the corresponding line segment to obtain the camera parameters (three-dimensional position and orientation) of each image and the three-dimensional line segment. The position is estimated (S34).
- the dimension measurement unit 400 generates a three-dimensional model represented by point cloud data (point cloud) using a plurality of images, and detects a line segment included in the generated three-dimensional model to obtain a line segment. You may generate a model.
- the line segment model generated by the line segment reconstruction (S13) is sent to the control unit 300.
- the control unit 300 generates a line segment model image of the line segment model viewed from a predetermined direction using the line segment model, and sends the line segment model image to the user interface (S14).
- the user interface 500 displays a UI (user interface) including a line segment model image.
- FIG. 13 is a diagram showing an example of this screen.
- the user may change the viewpoint position and enlarge / reduce the screen on the screen. That is, the viewpoint of the displayed linear model may be operable by the user.
- the linear model image may be superimposed and displayed on the image. This image may be a real-time image currently being captured, or may be an image captured in the past. That is, the viewpoint of the displayed linear model may be the same as the viewpoint of the image on which the linear model is superimposed.
- FIG. 14 is a diagram showing an example of this screen.
- line segment A and line segment B are selected.
- Information indicating the selected line segment is sent to the dimension measurement unit 400 via the control unit 300.
- the dimension measurement unit 400 estimates a plane including the selected plurality of line segments based on the information of the selected plurality of line segments (S16). For example, as shown in FIG. 15, a surface C (floor) including a line segment A and a line segment B is detected. Information on the estimated plane is sent to the control unit 300. The control unit 300 superimposes the plane information on the line segment model image and outputs the obtained image to the user interface (S17).
- the user interface 500 displays the received image.
- the user selects a line segment and a surface to be dimensioned on the screen (S18).
- FIG. 16 is a diagram showing an example of this screen. In the example shown in FIG. 16, the line segment D and the surface C are selected.
- the plane may not be selected by the user and the plane may be automatically selected.
- the user may be asked if the plane may be selected.
- the plane estimation may be automatically performed by the dimension measurement unit 400 using the captured image or, if a point cloud model is generated, the point cloud model. In this case, since a plurality of planes are estimated, the user selects a plane to be dimensioned from the plurality of planes.
- the information of the selected dimension measurement target is sent to the dimension measurement unit 400.
- the dimension measurement unit 400 measures the dimension of the dimension measurement target using the line segment model (S19). Specifically, the dimension measuring unit 400 measures the distance between the selected line segment and the surface using the line segment model.
- the distance between the line segment and the surface is, for example, the minimum distance between the line segment and the surface.
- the result of the dimensional measurement is sent to the control unit 300.
- the control unit 300 generates dimensional information indicating the result of the dimensional measurement and sends it to the user interface 500 (S20).
- the user interface displays dimensional information (S21).
- FIG. 17 is a diagram showing an example of this screen. As shown in FIG. 17, information indicating a portion where the dimension is measured and the dimension (distance) are displayed.
- the minimum distance between one point (for example, the center point) on the line segment and the surface may be calculated.
- the minimum distances of the plurality of points and the surfaces on the line segment may be calculated, and the average value or the median value of the calculated minimum distances may be calculated.
- a plurality of the minimum value, the maximum value, the average value, and the median value of the plurality of minimum distances may be calculated and the calculated values may be presented to the user. Further, the user may be notified that the line segment and the surface are not parallel to each other.
- the distance between two line segments may be measured.
- S15 to S17 are not performed, and two line segments to be dimensioned are selected in S18.
- the distance between the two surfaces may be measured.
- two surfaces are estimated by performing S15 to S17 twice.
- a point and a line segment or a point and a surface may be specified by the user, and the distance between the point and the line segment or the distance between the point and the surface may be measured.
- the dimension measuring device 100 has a function of measuring the distance between a line segment and a surface, a function of measuring the distance between a line segment and a line segment, and other functions (surface and surface, point and line segment or point and the like. It may have only one of (functions of measuring the distance between surfaces), or may have a plurality of functions. When having a plurality of functions, which function is used may be specified by the user at a predetermined timing (for example, at the start of S11 or S15), or the user may specify at an arbitrary timing. May be specified by. Alternatively, the function may be automatically switched according to the selection result of the line segment or the surface of the user.
- the distance between the two line segments is measured, and when the user selects a line segment and a surface as dimension measurement targets, the distance between the two line segments is measured.
- the distance between the line segment and the surface may be measured.
- FIG. 18 is a flowchart of the dimension measurement process by the dimension measurement unit 400.
- the image acquisition unit 401 acquires a plurality of images captured by the image pickup unit 200 (S41).
- the preprocessing unit 402 executes preprocessing on the acquired plurality of images (S42).
- the preprocessing is, for example, brightness adjustment, noise removal, resolution conversion, color space conversion, lens distortion correction, projection conversion, affine transformation, edge enhancement processing, trimming processing, or a combination thereof.
- the timing at which the preprocessing is executed may be performed in accordance with the timing at which the dimension measurement processing is executed, or may be performed in advance.
- the plurality of preprocessed images obtained by executing the image preprocessing by the preprocessing unit 402 may be stored in the storage unit 304 included in the control unit 300.
- the preprocessing by the preprocessing unit 402 does not have to be executed. Therefore, the dimension measurement unit 400 does not have to include the pretreatment unit 402.
- the line segment reconstruction unit 403 performs line segment reconstruction to calculate the three-dimensional shape of a predetermined space using a plurality of images taken by the imaging unit 200 (S43). Specifically, the line segment reconstruction unit 403 detects a line segment for each of a plurality of images, associates the images with each other, and uses a correspondence relationship to perform a geometric calculation to obtain a predetermined space. Calculate a line segment model that is a three-dimensional line segment.
- the plane estimation unit 404 estimates a three-dimensional plane using a line segment model. First, the plane estimation unit 404 selects a plurality of line segments included in the plane in order to estimate the plane (S44). For example, the plurality of line segments are selected based on a user operation. The plane estimation unit 404 may automatically make this selection. Next, the plane estimation unit 404 estimates a plane including a plurality of selected line segments (S45). The plane estimation process by the plane estimation unit 404 does not have to be executed. Therefore, the dimension measurement unit 400 does not have to include the plane estimation unit 404.
- the measurement unit 405 selects two line segments or line segments and surfaces to be dimensioned (S46). For example, this selection is based on user interaction. The measurement unit 405 may automatically make this selection. Next, the measuring unit 405 calculates the two selected line segments or the distance between the line segment and the surface (S47). Further, the calculated distance is displayed on the user interface 500, for example.
- the dimension measuring device 100 may instruct the user to perform re-imaging in such a case. For example, the dimension measuring device 100 detects an edge in an image, and if the detected edge continues to the edge of the image, determines that the edge (object) is cut off.
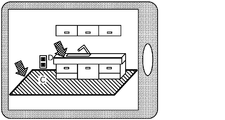
- FIG. 19 is a diagram showing an example of a screen in which the entire object (kitchen counter) does not fit in the image.
- FIG. 20 is a diagram showing an example of a screen on which a message is displayed in this case. It should be noted that such a message may be displayed after the still image is shot, may be displayed while the real-time image before the still image is shot is displayed on the monitor, or may be displayed during the shooting of the moving image. You may. Further, such a warning to the user may be given by displaying an icon or by voice.
- the dimension measuring device 100 selects two or more images showing the entire object from the plurality of images.
- the line segment reconstruction may be performed using the two or more images. That is, the dimension measuring device 100 may perform line segment reconstruction without using an image in which the object is cut off.
- the dimension measuring device performs the process shown in FIG.
- the dimension measuring device generates a line segment model which is a three-dimensional model of the target area represented by a line by using a plurality of images of the target area taken from a plurality of viewpoints (S51).
- the dimension measuring device calculates the dimension of a predetermined place in the target area by using the line segment model (S52).
- the dimension measuring device outputs the calculated dimension (S53).
- the dimension measuring device 100 presents the calculated dimension to the user or outputs the calculated dimension to another device.
- the dimension measuring device can reduce the processing amount by calculating the dimension using the line segment model. Further, for example, the selection operation by the user can be facilitated as compared with the case where the user needs to select two points. Specifically, in order to accurately measure the height L1 of the kitchen counter shown in FIG. 1 by designating two points, the user needs to specify the two points closest to the floor and the upper surface of the kitchen counter. be. On the other hand, when a line and a line or a line and a surface are specified as in the present embodiment, the shortest distance between the line and the line or the line and the surface is automatically measured, so that the user can select the line and the surface. Becomes easier.
- the dimension measuring device further displays a user interface including a line segment model, and a predetermined location is determined based on a plurality of lines included in the line segment model specified by the user via the user interface.
- a predetermined location is determined based on a plurality of lines included in the line segment model specified by the user via the user interface.
- the dimension of a predetermined location is the distance between two lines selected by the user via the user interface. According to this, when the user selects two lines from the line segment model, the distance between the two selected lines is measured. Therefore, the user can easily measure the dimensions of the desired portion.
- the dimension of a predetermined location is the distance between a line and a surface selected by the user via the user interface. According to this, when the user selects a plurality of lines from the line segment model, the distance between the line and the surface based on the selected plurality of lines is measured. Therefore, the user can easily measure the dimensions of the desired portion.
- a surface selected by the user is a surface defined by two lines selected by the user via the user interface. According to this, the user can easily select the desired surface.
- the dimension measuring device can generate a line segment model using an image of the entire object, so that the accuracy of the line segment model can be improved. Therefore, the dimension measuring device can improve the accuracy of the dimension measurement.
- the above line is a line segment.
- the dimension measuring device can generate a line segment model by using a line segment having both ends without using a part that is cut off in the image, so that the accuracy of the line segment model can be improved.
- the dimension measuring device includes a processor and a memory, and the processor performs the above processing using the memory.
- each processing unit included in the dimension measuring device or the like according to the above embodiment is typically realized as an LSI which is an integrated circuit. These may be individually integrated into one chip, or may be integrated into one chip so as to include a part or all of them.
- the integrated circuit is not limited to the LSI, and may be realized by a dedicated circuit or a general-purpose processor.
- An FPGA Field Programmable Gate Array
- a reconfigurable processor that can reconfigure the connection and settings of the circuit cells inside the LSI may be used.
- each component may be configured by dedicated hardware or may be realized by executing a software program suitable for each component.
- Each component may be realized by a program execution unit such as a CPU or a processor reading and executing a software program recorded on a recording medium such as a hard disk or a semiconductor memory.
- the present disclosure may be realized as a dimension measurement method or the like executed by a dimension measurement device or the like.
- the division of the functional block in the block diagram is an example, and a plurality of functional blocks can be realized as one functional block, one functional block can be divided into a plurality of functional blocks, and some functions can be transferred to other functional blocks. You may. Further, the functions of a plurality of functional blocks having similar functions may be processed by a single hardware or software in parallel or in a time division manner.
- each step in the flowchart is executed is for exemplifying in order to specifically explain the present disclosure, and may be an order other than the above. Further, a part of the above steps may be executed at the same time (parallel) as other steps.
- the present disclosure is not limited to this embodiment. As long as the gist of the present disclosure is not deviated, various modifications that can be conceived by those skilled in the art are applied to the present embodiment, and a form constructed by combining components in different embodiments is also within the scope of one or more embodiments. May be included within.
- This disclosure can be applied to a dimensional measuring device.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Multimedia (AREA)
- Software Systems (AREA)
- Geometry (AREA)
- Artificial Intelligence (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Evolutionary Computation (AREA)
- Databases & Information Systems (AREA)
- Computing Systems (AREA)
- Computer Graphics (AREA)
- Health & Medical Sciences (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Signal Processing (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
寸法計測方法は、対象領域を複数の視点から撮影した複数の画像を用いて、線分で表現される対象領域の三次元モデルである線分モデルを生成し(S51)、線分モデルを用いて、対象領域内の所定箇所の寸法を算出し(S52)、算出した寸法を出力する(S53)。例えば、寸法計測方法は、さらに、線分モデルを含むユーザインタフェースを表示し、所定箇所は、ユーザインタフェースを介してユーザにより指定された、線分モデルに含まれる複数の線に基づき決定されてもよい。
Description
本開示は、寸法計測方法及び寸法計測装置に関する。
建築構造物等の計測において、撮影された複数の画像を用いて三次元モデルを生成することで、作業者の負担を軽減できる。例えば、特許文献1には、複数の画像に基づいて多視点画像計測手法による点群計測を行うことにより、構造物形状を算出する手法が開示されている。
このような三次元モデルを用いた計測においては処理量を低減できることが望まれている。本開示は、処理量を低減できる寸法計測方法又は寸法計測装置を提供することを目的とする。
本開示の一態様に係る寸法計測方法は、対象領域を複数の視点から撮影した複数の画像を用いて、線で表現される前記対象領域の三次元モデルである線分モデルを生成し、前記線分モデルを用いて、前記対象領域内の所定箇所の寸法を算出し、算出した前記寸法を出力する。
本開示は、処理量を低減できる寸法計測方法又は寸法計測装置を提供できる。
本開示の一態様に係る寸法計測方法は、対象領域を複数の視点から撮影した複数の画像を用いて、線で表現される前記対象領域の三次元モデルである線分モデルを生成し、前記線分モデルを用いて、前記対象領域内の所定箇所の寸法を算出し、算出した前記寸法を出力する。
これによれば、当該寸法計測方法は、線分モデルを用いて寸法を算出することで処理量を低減できる。例えば、対象領域の形状を点群で表す場合に比べて、対象領域のエッジのみを線で表すことにより、処理量を低減できる。具体的には、対象領域のエッジだけでなく、対象領域の面も点群で表す三次元モデルを用いた寸法計測方法では、対象領域のエッジに関する測定を行うために、三次元モデルから当該エッジを表す点群のみを抽出する必要がある。これに対し、本開示の一態様に係る寸法計測方法によれば、線分モデルには対象領域のエッジを表す点群のみが含まれるため、当該エッジを表す点群を抽出する必要がない。また、本開示の一態様に係る線分モデルのデータ量は、対象領域の面も点群で表す三次元モデルのデータ量より少ない。
例えば、前記寸法計測方法は、さらに、前記線分モデルを含むユーザインタフェースを表示し、前記所定箇所は、前記ユーザインタフェースを介してユーザにより指定された、前記線分モデルに含まれる複数の線に基づき決定されてもよい。
これによれば、ユーザが線分モデルから複数の線を選択することで、選択した複数の線に基づく所定箇所の寸法が計測される。よって、ユーザは容易に所望の箇所の寸法を計測できる。
例えば、前記寸法は、前記ユーザインタフェースを介して前記ユーザにより選択された2つの線間の距離であってもよい。
これによれば、ユーザが線分モデルから2本の線を選択することで、選択した2本の線間の距離が計測される。よって、ユーザは容易に所望の箇所の寸法を計測できる。
例えば、前記寸法は、前記ユーザインタフェースを介して前記ユーザにより選択された線と面との距離であってもよい。
これによれば、ユーザが線分モデルから複数の線を選択することで、選択した複数の線に基づく線と面との距離が計測される。よって、ユーザは容易に所望の箇所の寸法を計測できる。
例えば、前記面は、前記ユーザインタフェースを介して前記ユーザにより選択された2つの線で規定される面であってもよい。
これによれば、ユーザは容易に所望の面を選択できる。
例えば、前記対象領域に含まれる対象物の全体が、撮影された画像に含まれていない場合、前記対象物の全体を撮影するように前記ユーザに促すメッセージを前記ユーザに提示してもよい。
これによれば、当該寸法計測方法は、対象物の全体が撮影された画像を用いて線分モデルを生成できるので線分モデルの精度を向上できる。よって、当該寸法計測方法は、寸法計測の精度を向上できる。
例えば、前記線は線分であってもよい。
これによれば、当該寸法計測方法は、画像中で見切れている箇所を使わずに両端がある線分を用いて線分モデルを生成できるので線分モデルの精度を向上できる。
また、本開示の一態様に係る寸法計測装置は、プロセッサと、メモリとを備え、前記プロセッサは、前記メモリを用いて、対象領域を撮影した複数の画像を用いて、線で表現される前記対象領域の三次元モデルである線分モデルを生成し、前記線分モデルを用いて、前記対象領域内の所定箇所の寸法を算出し、算出した前記寸法を出力する。
これによれば、当該寸法計測装置は、線分モデルを用いて寸法を算出することで処理量を低減できる。
また、本開示の他の態様に係る寸法計測装置は、入力インターフェースと、プロセッサと、出力インターフェースと、を備える。入力インターフェースには対象領域を複数の視点から撮影した複数の画像が入力される。プロセッサは、複数の画像に基づいて、対象領域を線で表現する三次元モデルを生成する。プロセッサは、三次元モデルの所定箇所の寸法を算出する。算出された寸法は、出力インターフェースから出力される。
なお、これらの包括的または具体的な態様は、システム、方法、集積回路、コンピュータプログラムまたはコンピュータ読み取り可能なCD-ROMなどの記録媒体で実現されてもよく、システム、方法、集積回路、コンピュータプログラム及び記録媒体の任意な組み合わせで実現されてもよい。
以下、実施の形態について、図面を参照しながら具体的に説明する。なお、以下で説明する実施の形態は、いずれも本開示の一具体例を示すものである。以下の実施の形態で示される数値、形状、材料、構成要素、構成要素の配置位置及び接続形態、ステップ、ステップの順序などは、一例であり、本開示を限定する主旨ではない。また、以下の実施の形態における構成要素のうち、独立請求項に記載されていない構成要素については、任意の構成要素として説明される。
(実施の形態)
建設業界では人手不足が深刻化しており、現場管理業務の効率向上が必要である。また、現場管理業務の中でも工数に多くの時間を割いている検査作業の効率化が求められている。この検査作業に含まれる寸法計測では、例えば、人がメジャーで計測を行うため、作業者の負担も大きい。
建設業界では人手不足が深刻化しており、現場管理業務の効率向上が必要である。また、現場管理業務の中でも工数に多くの時間を割いている検査作業の効率化が求められている。この検査作業に含まれる寸法計測では、例えば、人がメジャーで計測を行うため、作業者の負担も大きい。
本実施の形態では、例えば、モバイル端末においてカメラで撮影された映像から対象の寸法を自動で計測できる装置及び手法について説明する。
図1及び図2は、寸法計測の例を示す図である。図1は、キッチンの例を示し、例えば、キッチンカウンターの高さL1、及び、床からコンセントまでの距離L2が計測される。ここで、L1及びL2は、いずれも面と線との距離として定義される。例えば、L1は、床(面)とカウンターの一辺(線)との距離である。
図2は、玄関の例を示し、例えば、ドアのアンダーカットL3(床とドアの下辺との距離)と、タイルの幅L4と、ドアの隙間L5とが計測される。この例では、L3は線と面との距離であり、L4及びL5は線と線との距離である。このように、本実施の形態では、線と線、又は線と面の距離が計測される。
次に、本実施の形態に係る寸法計測装置の構成を説明する。図3は、本実施の形態に係る寸法計測装置100のブロック図である。寸法計測装置100は、撮像部200と、制御部300と、寸法計測部400と、ユーザインタフェース500とを備える。例えば、この寸法計測装置100は、タブレット端末又はスマートフォン等のモバイル端末に含まれる。
撮像部200は、画像(動画像又は静止画像)を撮影する。制御部300は、撮像部200、寸法計測部400及びユーザインタフェース500の制御を行う。寸法計測部400は、撮像部200で撮影された画像を用いて、線分再構成を行うことで線分で表現された三次元モデルである線分モデルを生成する。換言すれば、線分モデルは、三次元モデルから線分以外の形状(例えば面)を除いたモデルである。また、寸法計測部400は、線分モデルを用いて、ユーザにより指定された箇所の寸法(距離)を計測する。
なお、三次元モデルとは、撮像された計測対象をコンピュータ上で表現したものである。三次元モデルは、例えば、計測対象上の各三次元箇所の位置情報を有する。また、線分モデルは線分に限らず、線で表現された三次元モデルであってもよい。ここで、線とは、両端がある線分、一端のみがある半直線、端がない直線、又はそれらの組み合わせである。また、端がないとは、例えば、画像中で見切れていることを意味する。
ユーザインタフェース500は、ユーザの入力を受け付ける。また、ユーザインタフェース500は、ユーザへの情報の提示を行う。例えば、ユーザインタフェース500は、ディスプレイ及びタッチパネルである。なお、ユーザインタフェース500は、これに限定されず、任意のユーザインタフェースであってよい。例えば、ユーザインタフェース500は、マイク、及びスピーカ等を含んでもよい。
図4は、撮像部200の構成を示すブロック図である。撮像部200は、カメラ201と、架台202とを備える。カメラ201は、記憶部211と、制御部212と、光学系213と、イメージセンサ214とを備える。記憶部211は、イメージセンサ214で撮影された画像等を記憶する。制御部212は、記憶部211、光学系213及びイメージセンサ214を制御する。光学系213は、イメージセンサ214への光の入射を行うレンズ等を含む。イメージセンサ214は、画像を撮影する。架台202は、カメラ201の撮影方向を制御する。
図5は、制御部300の構成を示すブロック図である。制御部300は、撮像制御部301と、UI制御部302と、寸法計測制御部303と、記憶部304とを備える。撮像制御部301は、撮像部200を制御する。UI制御部302は、ユーザインタフェース500を制御する。寸法計測制御部303は、寸法計測部400を制御する。記憶部304は、撮像部200で撮影された画像、及び寸法計測部400で生成された線分モデル等を記憶する。
図6は、寸法計測部400の構成を示すブロック図である。寸法計測部400は、画像取得部401と、前処理部402と、線分再構成部403と、平面推定部404と、計測部405とを備える。画像取得部401は、撮像部200で撮影された複数の画像を取得する。前処理部402は、取得された複数の画像に前処理を行う。線分再構成部403は、前処理後の複数の画像を用いて線分再構成を行うことで線分モデルを生成する。平面推定部404は、線分モデルに含まれる平面を推定する。計測部405は、線分モデルを用いて、線分間の距離、又は、線分と面との距離を計測する。
図7は、寸法計測装置100における寸法計測処理のシーケンス図である。この例は、線分と面との距離を計測する場合の例である。まず、ユーザによりユーザインタフェースを介した撮影の開始指示が行われる(S11)。例えば、画面上のメニューの選択、又はアプリケーションの起動等により開始指示が行われる。
制御部300は、開始指示を受け付けると、撮像部200に撮像指示を送る。撮像部200は、撮像指示に従い複数の画像(静止画像)を撮像する(S12)。ここで、得られる複数の画像(静止画像)は、同一の対象物(又は対象空間)を異なる視点から撮影した2以上の画像である。図8は、この複数の画像の撮影の例を示す図である。例えば、ユーザは、単一の撮像装置(例えば、タブレット端末)を用いて異なる位置から対象物(例えばキッチン)の画像を撮影する。
なお、撮像部200は、必ずしも寸法計測装置100に含まれる必要はなく、寸法計測装置100が含まれる端末とは別の端末に含まれてもよい。この場合、撮像部200で撮影された画像は、無線通信等の任意の通信手段を介して、寸法計測装置100に送られる。
また、複数の画像は、複数の固定カメラで撮影された複数の画像であってもよい。また、複数の画像は、一つの位置からステレオカメラで撮影された2視点の画像であってもよい。また、複数の画像は、単一のカメラが移動しながら撮影した動画像に含まれる複数のフレームであってもよい。また、複数の画像はこれらの組み合わせであってもよい。
撮影された複数の画像は、制御部300を介して寸法計測部400に送られる。寸法計測部400は、複数の画像を用いて線分再構成を行うことで線分モデルを生成する(S13)。
以下、線分再構成処理(S13)について説明する。図9は、線分再構成処理(S13)のフローチャートである。また、図10~図12は、線分再構成を説明するための模式図である。
まず、寸法計測部400は、図10に示すように、複数の画像の各々に含まれる線分を検出する(S31)。次に、寸法計測部400は、各線分の特徴量を算出する(S32)。次に、寸法計測部400は、図11に示すように、算出した特徴量を用いて、画像間で線分のマッチングを行う(S33)。つまり、寸法計測部400は、画像間で対応する(同一の)線分である対応線分を検出する。次に、寸法計測部400は、図12に示すように、対応線分の関係を用いて幾何学的な計算により、各画像のカメラパラメータ(三次元位置及び向き)と、線分の三次元位置とを推定する(S34)。
なお、上記の線分再構成の手法は一例であり、公知の任意の手法が用いられてもよい。例えば、寸法計測部400は、複数の画像を用いて、点群データ(ポイントクラウド)で表現される三次元モデルを生成し、生成した三次元モデルに含まれる線分を検出することで線分モデルを生成してもよい。
再度、図7の説明を行う。線分再構成(S13)により生成された線分モデルは制御部300に送られる。制御部300は、線分モデルを用いて線分モデルを所定の方向から見た線分モデル画像を生成し、当該線分モデル画像をユーザインタフェースに送る(S14)。
ユーザインタフェース500は、線分モデル画像を含むUI(ユーザインタフェース)を表示する。図13は、この画面例を示す図である。なお、当該画面において、ユーザが視点位置を変更、及び拡大・縮小を行えてもよい。つまり、表示される線形モデルの視点はユーザが操作可能であってもよい。また、画像上に線形モデル画像が重畳されて表示されてもよい。この画像は、現在撮影中のリアルタイム画像であってもよいし、過去に撮影された画像であってもよい。つまり、表示される線形モデルの視点は、線形モデルが重畳される画像の視点と同じであってもよい。
ユーザは、当該画面において、平面を選択するための2以上の線分を選択する(S15)。図14は、この画面例を示す図である。図14に示す例では線分Aと線分Bとが選択される。選択された線分を示す情報は、制御部300を介して寸法計測部400に送られる。
寸法計測部400は、選択された複数の線分の情報に基づき、選択された複数の線分を含む平面を推定する(S16)。例えば、図15に示すように線分Aと線分Bとを含む面C(床)が検出される。推定された平面の情報は制御部300に送られる。制御部300は、平面の情報を線分モデル画像に重畳し、得られた画像をユーザインタフェースに出力する(S17)。
ユーザインタフェース500は、受信した画像を表示する。ユーザは、当該画面において、寸法計測対象の線分と面とを選択する(S18)。図16は、この画面例を示す図である。図16に示す例では線分Dと面Cとが選択される。
なお、平面推定(S16)において一つの平面のみが推定されている場合には、ユーザによる平面の選択は行われず、自動的に当該平面が選択されてもよい。または、ユーザに対して当該平面を選択してよいかの確認が行われてもよい。なお、平面推定は、撮影された画像、又は、点群モデルが生成されている場合には当該点群モデルを用いて、寸法計測部400において自動的に行われてもよい。この場合、複数の平面が推定されているので、ユーザは複数の平面から寸法計測対象の面を選択する。
選択された寸法計測対象の情報は寸法計測部400に送られる。寸法計測部400は、線分モデルを用いて寸法計測対象の寸法を計測する(S19)。具体的には、寸法計測部400は、線分モデルを用いて選択された線分と面との距離を計測する。ここで線分と面との距離とは、例えば、線分と面との最小距離である。
寸法計測の結果は制御部300に送られる。制御部300は、寸法計測の結果を示す寸法情報を生成し、ユーザインタフェース500に送る(S20)。ユーザインタフェースは寸法情報を表示する(S21)。図17は、この画面例を示す図である。図17に示すように、寸法を計測した部分を示す情報と、その寸法(距離)とが表示される。
なお、線分と面とが平行でない場合には、線分上の1点(例えば中心点)と面との最小距離が算出されてもよい。または、線分上の複数の点と面とのそれぞれの最小距離が算出され、算出された複数の最小距離の平均値又は中央値が算出されてもよい。または、複数の最小距離の最小値、最大値、平均値及び中央値のうちの複数が算出され、算出された値がユーザに提示されてもよい。また、線分と面とが平行でない旨がユーザに通知されてもよい。
なお、ユーザの操作が発生する各画面において、ユーザに操作を促す、又は操作内容を示すメッセージ等が表示されてもよい。また、上記の説明ではユーザへの情報の提示方法として文字等の表示が用いられる例を示したが、アイコンの表示、又は音声出力等の任意の手法が用いられてもよい。
また、ここでは、平面推定(S15~S17)を行った後、寸法計測対象の線分が選択される(S18)例を述べたが、寸法計測対象の線分が先に選択され、その後、平面推定(S15~S17)が行われてもよい。
また、ここでは、線分と面との距離を計測する例を述べたが、2つの線分間の距離が計測されてもよい。この場合、S15~S17は行われず、S18において寸法計測対象の2つの線分が選択される。
また、2つの面間の距離が計測されてもよい。この場合、S15~S17が2回行われることで、2つの面が推定される。また、ユーザにより点と線分、又は、点と面が指定され、点と線分との距離、又は、点と面との距離が計測されてもよい。
また、寸法計測装置100は、線分と面との距離を計測する機能、線分と線分との距離を計測する機能、及び、その他の機能(面と面、点と線分又は点と面の距離を計測する機能)のいずれかのみを有してもよいし、複数の機能を有してもよい。複数の機能を有する場合には、いずれの機能が使用されるかが、予め定められたタイミング(例えば、S11又はS15の開始時等)にユーザにより指定されてもよいし、任意のタイミングでユーザにより指定されてもよい。または、ユーザの線分又は面の選択結果に応じて、自動的に機能が切り替えられてもよい。例えば、ユーザにより寸法計測対象として2つの線分が選択された場合には、当該2つの線分間の距離が計測され、ユーザにより寸法計測対象として線分と面とが選択された場合には、当該線分と面との間の距離が計測されてもよい。
次に、寸法計測部400の処理の流れを説明する。図18は、寸法計測部400による寸法計測処理のフローチャートである。まず、画像取得部401は、撮像部200により撮影された複数の画像を取得する(S41)。
次に、前処理部402は、取得された複数の画像に前処理を実行する(S42)。前処理とは、例えば、明るさ調整、ノイズ除去、解像度変換、色空間変換、レンズ歪補正、射影変換、アフィン変換、エッジ強調処理、トリミング処理、又はこれらの組み合わせである。なお、前処理が実行されるタイミングは、寸法計測処理が実行されるタイミングに合わせて行われてもよいし、事前に行われていてもよい。前処理部402により画像前処理が実行されることにより得られた前処理済みの複数の画像は、制御部300が備える記憶部304に記憶されてもよい。なお、前処理部402による前処理は実行されなくてもよい。このため、寸法計測部400は、前処理部402を備えなくてもよい。
次に、線分再構成部403は、撮像部200により撮影された複数の画像を用いて、所定の空間の三次元形状を算出する線分再構成を行う(S43)。具体的には、線分再構成部403は、複数の画像の各々に対して線分を検出し、画像間の対応付けを行い、対応関係を用いて幾何学的な計算により所定の空間の三次元線分である線分モデルを算出する。
平面推定部404は、線分モデルを用いて三次元平面を推定する。まず、平面推定部404は、平面を推定するために、平面に含まれる複数の線分を選択する(S44)。例えば、この複数の線分はユーザによる操作に基づき選択される。なお、平面推定部404は、この選択を自動で行ってもよい。次に、平面推定部404は、選択された複数の線分を含む平面を推定する(S45)。なお、平面推定部404による平面推定処理は実行されなくてもよい。このため、寸法計測部400は、平面推定部404を備えなくてもよい。
次に、計測部405は、寸法計測対象の2つの線分、又は線分と面を選択する(S46)。例えば、この選択は、ユーザによる操作に基づき行われる。なお、計測部405は、この選択を自動で行ってもよい。次に、計測部405は、選択された2つの線分間、又は線分と面との間の距離を算出する(S47)。また、算出された距離は、例えば、ユーザインタフェース500上に表示される。
ここで、線分再構成では、線分を用いてマッチングを行うため、画像において対象物が見切れている場合、つまり、対象物の全体が画像に納まっていない場合に精度が低下する。よって、寸法計測装置100は、このような場合には、再撮影を行うようにユーザに指示してもよい。例えば、寸法計測装置100は、画像内のエッジを検出し、検出したエッジが画像の縁まで続いている場合には、当該エッジ(対象物)が見切れていると判定する。
図19は、対象物(キッチンカウンター)の全体が画像に納まっていない画面例を示す図である。図20は、この場合においてメッセージが表示された画面例を示す図である。なお、このようなメッセージは、静止画像の撮影後に表示されてもよし、静止画像を撮影する前のリアルタイム映像がモニタ表示されている状態において表示されてもよし、動画像の撮影中に表示されてもよい。また、このようなユーザへの警告は、アイコンの表示、又は音声により行われてもよい。
また、線分再構成用の複数の画像として、3枚以上の画像が用いられる場合には、寸法計測装置100は、複数の画像から対象物の全体が映っている2以上の画像を選択し、当該2以上の画像を用いて線分再構成を行ってもよい。つまり、寸法計測装置100は、対象物が見切れている画像を用いずに線分再構成を行ってもよい。
以上のように、本実施の形態に係る寸法計測装置は、図21に示す処理を行う。寸法計測装置は、対象領域を複数の視点から撮影した複数の画像を用いて、線で表現される対象領域の三次元モデルである線分モデルを生成する(S51)。次に、寸法計測装置は、線分モデルを用いて、対象領域内の所定箇所の寸法を算出する(S52)。次に、寸法計測装置は、算出した寸法を出力する(S53)。例えば、寸法計測装置100は、算出した寸法を、ユーザに提示する、又は他の装置に出力する。
これによれば、寸法計測装置は、線分モデルを用いて寸法を算出することで処理量を低減できる。また、例えば、ユーザが2点を選択する必要がある場合に比べて、ユーザによる選択操作を容易にできる。具体的には、図1に示すキッチンカウンターの高さL1を2点を指定して正確に計測するためには、ユーザは、床とキッチンカウンターの上面との最も近い2点を指定する必要がある。一方、本実施の形態のように線と線、又は線と面とを指定する場合には、自動的に線と線、又は線と面との最短距離が計測されるので、ユーザによる選択操作が容易となる。
例えば、寸法計測装置は、さらに、線分モデルを含むユーザインタフェースを表示し、所定箇所は、ユーザインタフェースを介してユーザにより指定された、線分モデルに含まれる複数の線に基づき決定される。これによれば、ユーザが線分モデルから複数の線を選択することで、選択した複数の線に基づく所定箇所の寸法が計測される。よって、ユーザは容易に所望の箇所の寸法を計測できる。
例えば、所定箇所の寸法は、ユーザインタフェースを介してユーザにより選択された2つの線間の距離である。これによれば、ユーザが線分モデルから2本の線を選択することで、選択した2本の線間の距離が計測される。よって、ユーザは容易に所望の箇所の寸法を計測できる。
例えば、所定箇所の寸法は、ユーザインタフェースを介してユーザにより選択された線と面との距離である。これによれば、ユーザが線分モデルから複数の線を選択することで、選択した複数の線に基づく線と面との距離が計測される。よって、ユーザは容易に所望の箇所の寸法を計測できる。
例えば、ユーザにより選択された面は、ユーザインタフェースを介してユーザにより選択された2つの線で規定される面である。これによれば、ユーザは容易に所望の面を選択できる。
例えば、対象領域に含まれる対象物の全体が、撮影された画像に含まれていない場合、対象物の全体を撮影するようにユーザに促すメッセージをユーザに提示する。これによれば、寸法計測装置は、対象物の全体が撮影された画像を用いて線分モデルを生成できるので線分モデルの精度を向上できる。よって、寸法計測装置は、寸法計測の精度を向上できる。
例えば、上記線は線分である。これによれば、寸法計測装置は、画像中で見切れている箇所を使わずに両端がある線分を用いて線分モデルを生成できるので線分モデルの精度を向上できる。
例えば、寸法計測装置は、プロセッサと、メモリとを備え、プロセッサはメモリを用いて上記処理を行う。
以上、本開示の実施の形態に係る寸法計測装置等について説明したが、本開示は、この実施の形態に限定されるものではない。
また、上記実施の形態に係る寸法計測装置等に含まれる各処理部は典型的には集積回路であるLSIとして実現される。これらは個別に1チップ化されてもよいし、一部又は全てを含むように1チップ化されてもよい。
また、集積回路化はLSIに限るものではなく、専用回路又は汎用プロセッサで実現してもよい。LSI製造後にプログラムすることが可能なFPGA(Field Programmable Gate Array)、又はLSI内部の回路セルの接続や設定を再構成可能なリコンフィギュラブル・プロセッサを利用してもよい。
また、上記各実施の形態において、各構成要素は、専用のハードウェアで構成されるか、各構成要素に適したソフトウェアプログラムを実行することによって実現されてもよい。各構成要素は、CPUまたはプロセッサなどのプログラム実行部が、ハードディスクまたは半導体メモリなどの記録媒体に記録されたソフトウェアプログラムを読み出して実行することによって実現されてもよい。
また、本開示は、寸法計測装置等により実行される寸法計測方法等として実現されてもよい。
また、ブロック図における機能ブロックの分割は一例であり、複数の機能ブロックを一つの機能ブロックとして実現したり、一つの機能ブロックを複数に分割したり、一部の機能を他の機能ブロックに移してもよい。また、類似する機能を有する複数の機能ブロックの機能を単一のハードウェア又はソフトウェアが並列又は時分割に処理してもよい。
また、フローチャートにおける各ステップが実行される順序は、本開示を具体的に説明するために例示するためのものであり、上記以外の順序であってもよい。また、上記ステップの一部が、他のステップと同時(並列)に実行されてもよい。
以上、一つまたは複数の態様に係る寸法計測装置等について、実施の形態に基づいて説明したが、本開示は、この実施の形態に限定されるものではない。本開示の趣旨を逸脱しない限り、当業者が思いつく各種変形を本実施の形態に施したものや、異なる実施の形態における構成要素を組み合わせて構築される形態も、一つまたは複数の態様の範囲内に含まれてもよい。
本開示は、寸法計測装置に適用できる。
100 寸法計測装置
200 撮像部
201 カメラ
202 架台
211 記憶部
212 制御部
213 光学系
214 イメージセンサ
300 制御部
301 撮像制御部
302 UI制御部
303 寸法計測制御部
304 記憶部
400 寸法計測部
401 画像取得部
402 前処理部
403 線分再構成部
404 平面推定部
405 計測部
500 ユーザインタフェース
200 撮像部
201 カメラ
202 架台
211 記憶部
212 制御部
213 光学系
214 イメージセンサ
300 制御部
301 撮像制御部
302 UI制御部
303 寸法計測制御部
304 記憶部
400 寸法計測部
401 画像取得部
402 前処理部
403 線分再構成部
404 平面推定部
405 計測部
500 ユーザインタフェース
Claims (8)
- 対象領域を複数の視点から撮影した複数の画像を用いて、線で表現される前記対象領域の三次元モデルである線分モデルを生成し、
前記線分モデルを用いて、前記対象領域内の所定箇所の寸法を算出し、
算出した前記寸法を出力する
寸法計測方法。 - 前記寸法計測方法は、さらに、
前記線分モデルを含むユーザインタフェースを表示し、
前記所定箇所は、前記ユーザインタフェースを介してユーザにより指定された、前記線分モデルに含まれる複数の線に基づき決定される
請求項1記載の寸法計測方法。 - 前記寸法は、前記ユーザインタフェースを介して前記ユーザにより選択された2つの線間の距離である
請求項2記載の寸法計測方法。 - 前記寸法は、前記ユーザインタフェースを介して前記ユーザにより選択された線と面との距離である
請求項2記載の寸法計測方法。 - 前記面は、前記ユーザインタフェースを介して前記ユーザにより選択された2つの線で規定される面である
請求項4記載の寸法計測方法。 - 前記対象領域に含まれる対象物の全体が、撮影された画像に含まれていない場合、前記対象物の全体を撮影するように前記ユーザに促すメッセージを前記ユーザに提示する
請求項1記載の寸法計測方法。 - 前記線は線分である
請求項1~6のいずれか1項に記載の寸法計測方法。 - プロセッサと、
メモリとを備え、
前記プロセッサは、前記メモリを用いて、
対象領域を撮影した複数の画像を用いて、線で表現される前記対象領域の三次元モデルである線分モデルを生成し、
前記線分モデルを用いて、前記対象領域内の所定箇所の寸法を算出し、
算出した前記寸法を出力する
寸法計測装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202180018963.2A CN115210529A (zh) | 2020-03-24 | 2021-02-22 | 尺寸测量方法及尺寸测量装置 |
| EP21775971.1A EP4130648A4 (en) | 2020-03-24 | 2021-02-22 | DIMENSION MEASURING METHOD AND DIMENSION MEASURING DEVICE |
| JP2022509429A JP7710158B2 (ja) | 2020-03-24 | 2021-02-22 | 寸法計測方法及び寸法計測装置 |
| US17/942,548 US12584727B2 (en) | 2020-03-24 | 2022-09-12 | Dimension measurement method and dimension measurement device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020-052313 | 2020-03-24 | ||
| JP2020052313 | 2020-03-24 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US17/942,548 Continuation US12584727B2 (en) | 2020-03-24 | 2022-09-12 | Dimension measurement method and dimension measurement device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021192782A1 true WO2021192782A1 (ja) | 2021-09-30 |
Family
ID=77890228
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/006668 Ceased WO2021192782A1 (ja) | 2020-03-24 | 2021-02-22 | 寸法計測方法及び寸法計測装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US12584727B2 (ja) |
| EP (1) | EP4130648A4 (ja) |
| JP (1) | JP7710158B2 (ja) |
| CN (1) | CN115210529A (ja) |
| TW (1) | TW202138757A (ja) |
| WO (1) | WO2021192782A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114792343B (zh) * | 2022-06-21 | 2022-09-30 | 阿里巴巴达摩院(杭州)科技有限公司 | 图像获取设备的标定方法、获取图像数据的方法、装置 |
| CN116623893A (zh) * | 2023-02-07 | 2023-08-22 | 中国中建设计研究院有限公司 | 折叠式坡道板系统及其智能化数据处理方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20140375684A1 (en) * | 2013-02-17 | 2014-12-25 | Cherif Atia Algreatly | Augmented Reality Technology |
| JP2015049776A (ja) * | 2013-09-03 | 2015-03-16 | 国立大学法人 東京大学 | 画像処理装置、画像処理方法及び画像処理プログラム |
| WO2017056567A1 (ja) * | 2015-10-01 | 2017-04-06 | 三菱電機株式会社 | 寸法計測装置 |
| US20190162534A1 (en) * | 2017-11-24 | 2019-05-30 | Leica Geosystems Ag | True to size 3d-model conglomeration |
| JP2019152533A (ja) | 2018-03-02 | 2019-09-12 | 株式会社パスコ | 建築構造物形状算出システムおよび建築構造物撮影装置 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3791186B2 (ja) | 1998-05-22 | 2006-06-28 | 三菱電機株式会社 | 景観モデリング装置 |
| JP4322755B2 (ja) | 2004-08-24 | 2009-09-02 | 京セラミタ株式会社 | 情報通知システム及び通信装置 |
| JP4659631B2 (ja) | 2005-04-26 | 2011-03-30 | 富士重工業株式会社 | 車線認識装置 |
| US10102583B2 (en) * | 2008-01-18 | 2018-10-16 | Mitek Systems, Inc. | System and methods for obtaining insurance offers using mobile image capture |
| US8442304B2 (en) | 2008-12-29 | 2013-05-14 | Cognex Corporation | System and method for three-dimensional alignment of objects using machine vision |
| JP5538868B2 (ja) | 2009-12-22 | 2014-07-02 | キヤノン株式会社 | 画像処理装置、その画像処理方法及びプログラム |
| CA2850937A1 (en) * | 2011-10-04 | 2013-04-11 | Metalforming, Inc. | Using videogrammetry to fabricate parts |
| WO2015178014A1 (ja) | 2014-05-23 | 2015-11-26 | 株式会社スプリックス | 学習支援システム、学習支援サーバ、学習支援方法、及び学習支援プログラム |
| CN110782524B (zh) * | 2019-10-25 | 2023-05-23 | 重庆邮电大学 | 基于全景图的室内三维重建方法 |
-
2021
- 2021-02-22 EP EP21775971.1A patent/EP4130648A4/en active Pending
- 2021-02-22 CN CN202180018963.2A patent/CN115210529A/zh active Pending
- 2021-02-22 WO PCT/JP2021/006668 patent/WO2021192782A1/ja not_active Ceased
- 2021-02-22 JP JP2022509429A patent/JP7710158B2/ja active Active
- 2021-03-19 TW TW110109936A patent/TW202138757A/zh unknown
-
2022
- 2022-09-12 US US17/942,548 patent/US12584727B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20140375684A1 (en) * | 2013-02-17 | 2014-12-25 | Cherif Atia Algreatly | Augmented Reality Technology |
| JP2015049776A (ja) * | 2013-09-03 | 2015-03-16 | 国立大学法人 東京大学 | 画像処理装置、画像処理方法及び画像処理プログラム |
| WO2017056567A1 (ja) * | 2015-10-01 | 2017-04-06 | 三菱電機株式会社 | 寸法計測装置 |
| US20190162534A1 (en) * | 2017-11-24 | 2019-05-30 | Leica Geosystems Ag | True to size 3d-model conglomeration |
| JP2019152533A (ja) | 2018-03-02 | 2019-09-12 | 株式会社パスコ | 建築構造物形状算出システムおよび建築構造物撮影装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4130648A4 |
Also Published As
| Publication number | Publication date |
|---|---|
| US12584727B2 (en) | 2026-03-24 |
| TW202138757A (zh) | 2021-10-16 |
| EP4130648A1 (en) | 2023-02-08 |
| JPWO2021192782A1 (ja) | 2021-09-30 |
| EP4130648A4 (en) | 2023-09-06 |
| CN115210529A (zh) | 2022-10-18 |
| US20230003506A1 (en) | 2023-01-05 |
| JP7710158B2 (ja) | 2025-07-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112330824B (zh) | 图像处理方法、装置、电子设备和存储介质 | |
| JP4764959B1 (ja) | 撮影装置及びその制御方法 | |
| US11258940B2 (en) | Imaging apparatus | |
| TWI387935B (zh) | 影像生成方法、及其程式與記錄有程式的記錄媒體 | |
| WO2021035891A1 (zh) | 基于增强现实技术的投影方法及投影设备 | |
| WO2019091117A1 (en) | Robotic 3d scanning systems and scanning methods | |
| JP2020150448A (ja) | 撮像装置及びその制御方法、プログラム、記憶媒体 | |
| BR102022015085A2 (pt) | Aparelho de processamento de imagem, método de processamento de imagem e meio de armazenamento | |
| US20140168375A1 (en) | Image conversion device, camera, video system, image conversion method and recording medium recording a program | |
| CN113647093B (zh) | 图像处理装置、3d模型生成方法和程序 | |
| JP7710158B2 (ja) | 寸法計測方法及び寸法計測装置 | |
| JP2014036415A (ja) | パノラマ画像生成装置 | |
| CN112969963B (zh) | 信息处理设备及其控制方法和存储介质 | |
| JP2016085380A (ja) | 制御装置、制御方法、及び、プログラム | |
| JP2019041188A (ja) | 画像処理装置、撮像装置、画像処理装置の制御方法およびプログラム | |
| JP2005063041A (ja) | 3次元モデリング装置、方法、及びプログラム | |
| JP2002117403A (ja) | 画像処理装置および画像処理方法 | |
| JP2009258005A (ja) | 三次元測定装置及び三次元測定方法 | |
| JP2008117305A (ja) | 画像処理装置 | |
| JP2005141655A (ja) | 3次元モデリング装置及び3次元モデリング方法 | |
| JPWO2021192782A5 (ja) | ||
| JP6704700B2 (ja) | 画像処理装置およびその制御方法ならびにプログラム | |
| JP2018132377A (ja) | 立体形状測定装置、制御方法、プログラム及び記録媒体 | |
| JP7829136B2 (ja) | 寸法計測装置、寸法計測方法及びプログラム | |
| JP2015220662A (ja) | 画像処理装置及びその制御方法、並びにプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21775971 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2022509429 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2021775971 Country of ref document: EP Effective date: 20221024 |