WO2022085539A1 - 情報処理装置、情報処理方法、及び記憶媒体 - Google Patents
情報処理装置、情報処理方法、及び記憶媒体 Download PDFInfo
- Publication number
- WO2022085539A1 WO2022085539A1 PCT/JP2021/037926 JP2021037926W WO2022085539A1 WO 2022085539 A1 WO2022085539 A1 WO 2022085539A1 JP 2021037926 W JP2021037926 W JP 2021037926W WO 2022085539 A1 WO2022085539 A1 WO 2022085539A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- robot
- robots
- information processing
- information
- terminal device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images







Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0011—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement
- G05D1/0027—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement involving a plurality of vehicles, e.g. fleet or convoy travelling
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/0084—Program-controlled manipulators comprising a plurality of manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1679—Program controls characterised by the tasks executed
- B25J9/1682—Dual arm manipulator; Coordination of several manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1679—Program controls characterised by the tasks executed
- B25J9/1689—Teleoperation
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0011—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement
- G05D1/0038—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement by providing the operator with simple or augmented images from one or more cameras located onboard the vehicle, e.g. tele-operation
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40169—Display of actual situation at the remote site
Definitions
- the present invention relates to an information processing device, an information processing method, and a storage medium.
- Patent Document 1 describes a moving body with a camera that provides a photographed image to a user at a remote location.
- the robot when the user remotely controls the robot, the robot functions as a user's alter ego, and the user can experience the experience in the place where the robot is. That in itself is of great value to the user, but there is a desire to experience a more valuable experience.
- the conventional telepresence robot since the user remotely controls a specific robot, there is a limit to the experience that can be experienced.
- One of the objects of the present invention is to provide a technique for enabling a user who operates a robot to experience a higher value experience.
- the information processing device is an information processing device including a processor and a storage unit, and the processor acquires information on selection conditions by executing a program stored in the storage unit.
- the first robot is set as the operation target by the terminal device, and the operation target is set from the first robot to the operation target. It is configured to carry out a control method including enabling switching to a second robot different from the first robot among a plurality of selected robots.
- the information processing method is an information processing method performed by a computer, in which information on selection conditions is acquired and a plurality of non-fixed robots selected according to the selection conditions.
- the first robot is set as the operation target by the terminal device, and the operation target is changed from the first robot to the second robot different from the first robot among the plurality of selected robots. Including making it switchable.
- the computer obtains information on the selection conditions, and the first robot among a plurality of non-fixed robots selected according to the selection conditions is a terminal device.
- Information processing including setting an operation target and enabling the operation target to be switched from the first robot to a second robot different from the first robot among the plurality of selected robots.
- a storage medium that stores a program for executing a method.
- the user who operates the robot can experience a higher value experience.
- System configuration> An exemplary configuration of the system 1 according to an embodiment will be described with reference to FIGS. 1 and 2.
- the system 1 allows the user to remotely control one or more robots via a terminal device. Multiple robots are placed in different places. While operating a robot via one terminal device, the user can switch the robot to be operated and operate another robot.
- the system 1 includes a server device 10, terminal devices 20a, 20b, 20c, and robots 30a, 30b, 30c.
- Each device or robot is configured to be able to communicate with other devices or robots wirelessly or by wire (or both).
- the system 1 includes three terminal devices, but the number of terminal devices may be arbitrarily set and may be two or less or four or more.
- the terminal devices 20a, 20b, and 20c may have similar configurations or different configurations. In the present embodiment, when the terminal devices 20a, 20b, and 20c are referred to without distinguishing from each other, they are collectively referred to as the terminal device 20.
- the system 1 includes three robots, but the number of robots is arbitrarily set and may be two or less or four or more.
- the robots 30a, 30b, and 30c may have similar configurations or different configurations. In the present embodiment, when the robots 30a, 30b, and 30c are referred to without being distinguished from each other, they are collectively referred to as the robot 30. The outline of each device and robot will be described below.
- the server device 10 is a device that executes various processes related to remote control of a plurality of robots 30 from the terminal device 20.
- the server device 10 further performs a search process for the available robot 30, management of reservation registration for the operation of the robot 30, and the like.
- the server device 10 is composed of an information processing device such as a server computer.
- the server device 10 may be configured by one information processing device or may be configured by a plurality of information processing devices (for example, cloud computing or edge computing).
- the terminal device 20 is an information processing device used by the user for operating the robot 30 and reserving the operation.
- the terminal device 20 is a general-purpose or dedicated information processing device such as a smartphone, a tablet terminal, a PDA (Personal Digital Assistants), a personal computer, a head-mounted display, and an operation system for a specific purpose.
- the terminal device 20 used for reserving the operation of the robot 30 may be a device different from the terminal device 20 used for the operation, or may be the same device.
- the robot 30 is a non-fixed robot.
- the robot 30 is not fixed in the case where the robot 30 is a mobile type having a drive unit for movement by wheels or the like, and the case where the robot 30 is a wearable type which can be worn by a person and has a drive unit for operation of a manipulator or the like. Including some cases.
- the mobile robot is shown in, for example, Patent Document 1.
- the moving part of the mobile robot is one that travels by one wheel, two wheels or multiple wheels, one that travels by a caterpillar, one that travels on a rail, one that jumps and moves, bipedal walking, four-legged walking or multi-legged walking. Includes those that navigate on or under water with a screw, and those that fly with a propeller or the like.
- Wearable robots include, for example, MHD Yaman Saraiji, Tomoya Sasaki, Reo Matsumura, Kouta Minamizawa and Masahiko Inami, "Fusion: full body surrogacy for collaborative communication," Proceeding SIGGRAPH '18 ACM It has been published.
- the robot 30 includes a vehicle or a heavy machine capable of automatic or semi-automatic traveling, or a drone or an airplane. Further, the robot 30 includes a robot installed in a sports stadium or the like and equipped with a camera that can move on rails. Further, the robot 30 is a satellite type robot launched into outer space, and includes a robot capable of controlling the attitude and the shooting direction of the camera. Further, the robot 30 may be a so-called telepresence robot or an avatar robot.
- the user can remotely control the robot 30 (for example, move the robot 30 or operate the camera mounted on the robot 30) via the terminal device 20.
- the communication architecture for transmitting and receiving operation signals or data between the terminal device 20 and the robot 30 can adopt any architecture, for example, P2P (Peer-to-Peer) or a client server.
- the robot 30 operates in response to a signal received from the terminal device 20, and the robot 30 relates to a location where the robot 30 is located, such as image data and voice data acquired through a camera, a microphone, and other devices mounted on the robot 30.
- the acquired or detected data is transmitted to the terminal device 20.
- the user can experience the experience as if he / she is in the place where the robot 30 is located through the terminal device 20 and the robot 30.
- FIG. 3 conceptually shows the terminal device 20a used by the user and the robot group.
- the robot group shown in FIG. 3 is a group of a plurality of robots 30 that can be operated by the terminal device 20a.
- the robot group includes robots 30a, robots 30b, ..., And robots 30n (n is an integer of 3 or more) located at different locations.
- the plurality of robots 30 included in one robot group may be set to include robots 30 existing in different places, for example, places separated from each other by a predetermined distance or more, instead of the same place.
- the predetermined distance may be, for example, 10 m, 100 m, 1 km, or 100 km.
- Other examples of different locations include different floors in the same facility, different sections in the same facility, different facilities, different administrative divisions, or different time zones.
- the plurality of robots 30 included in one robot group include, for example, a plurality of robots 30 associated in advance, or a plurality of robots 30 belonging to the same group among groups classified under predetermined conditions.
- at least a part of the plurality of robots 30 may be robots existing in a virtual (virtual world). That is, the plurality of robots 30 may include a robot existing in the real world and a robot existing in the virtual world.
- the user can freely switch and operate the robot 30 to be operated from among the plurality of robots 30 included in the robot group via the terminal device 20a.
- the switching of the robot 30 to be operated may be performed according to the operation of the user, or may be automatically performed according to the satisfaction of the preset conditions.
- the communication session between the terminal device 20 and the first robot 30i is disconnected, and the terminal device 20 and the second robot are used.
- the establishment of a communication session with 30j is realized by the terminal device 20 sequentially or substantially simultaneously.
- the robot 30 receives, for example, information (for example, an IP address) for connecting to the switching destination robot 30 from the server device 10, and responds to the user's operation.
- information for example, an IP address
- the communication session with the connected robot 30 for operation is automatically disconnected, and the process of connecting to the switching destination robot 30 is started.
- the robot 30 may store information for connecting to the switching destination robot 30 in its own machine in advance, and may start a process of connecting to the switching destination robot 30 using the information.
- the server device 10 automatically responds to or automatically operates by the user.
- the communication session between the connected terminal device 20 and the robot 30 for operation may be disconnected, and the process of connecting the communication session between the switching destination robot 30 and the terminal device 20 may be started.
- the user can freely switch and operate the robot 30 to be operated from among the plurality of robots 30 via the terminal device 20a. Therefore, the user can experience the experience as if he / she is in each place where there are a plurality of robots 30 without moving to each of the plurality of places.
- FIG. 4 conceptually shows the switching of the robot 30 to be operated in chronological order.
- the user operates the robot 30a selected from the predetermined robot group via the terminal device 20a to move the robot 30a along the travel path A1.
- the predetermined robot group is a plurality of robots 30 that satisfy some conditions (for example, a plurality of robots 30 that are hit as a result of a keyword search in the database of the robot 30, or a plurality of robots that are previously grouped into the same category by some theme. Robot 30 etc.).
- the image taken by the camera of the robot 30a (the image taken by the traveling path A1) is displayed on the display unit of the terminal device 20a.
- the operation target by the terminal device 20a is switched from the robot 30a to the robot 30b, for example, automatically or in response to a user operation.
- the user moves the robot 30b along the travel path A2 by operating the robot 30b via the terminal device 20a.
- the image taken by the camera of the robot 30b (the image taken by the traveling path A2) is displayed on the display unit of the terminal device 20a.
- the operation target by the terminal device 20a is switched from the robot 30b to the robot 30n, for example, automatically or in response to a user operation.
- the robot 30a and the robot 30b may be robots existing in the real world, and the robot 30n may be a robot existing in the virtual world.
- the robot 30a and the robot 30b are operated, a real-world landscape image taken by the robot 30a and the robot 30b is displayed on the display unit of the terminal device 20a.
- a landscape image of the virtual world taken by the virtual camera of the robot 30n is displayed on the display unit of the terminal device 20a.
- the user instantly moves to each place where the plurality of robots 30 are present via the terminal device 20a, and experiences the experience as if he / she is also there. It is possible.
- the robot 30a is placed in a museum in Tokyo
- the robot 30b is placed in a museum in Paris
- the virtual robot 30c is placed in a museum in a virtual world.
- the user does not actually move, but through the terminal device 20a, for example, after appreciating art at a museum in Tokyo, appreciating art at a museum in Paris, and then at a museum in a virtual world. You can appreciate art.
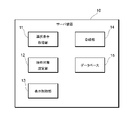
- the server device 10 has a selection condition acquisition unit 11, an operation target setting unit 12, a display control unit 13, a registration unit 14, and a database 15 as main function configurations.
- the functions of the server device 10 are not limited to these, and may have functions generally possessed by a computer and other functions.
- the selection condition acquisition unit 11 acquires the selection conditions of the robot 30 that can be operated by a certain terminal device 20 (for example, the terminal device 20a).
- the selection condition includes information about the content that can be experienced by the user through the robot 30.
- the selection condition is acquired by any method.
- the selection condition of the robot 30 that can be operated by the terminal device 20a is acquired based on the user input to the terminal device 20a.
- the server device 10 first receives information based on the user input from the terminal device 20a.
- the selection condition acquisition unit 11 is located in the museum where the Picasso painting is placed (or is located in the vicinity of the Picasso painting) as the selection condition of the robot 30. (That is, the condition that the experience about Picasso is possible) may be acquired (or set).
- the condition that the facility is located in a pre-recommended facility among the facilities where shopping is possible (for example, a department store) is set. It may be acquired as a selection condition of the robot 30.
- User input to the terminal device 20a includes manual input such as typing by the user, voice input, or input by any other method.
- the operation target setting unit 12 selects a plurality of robots 30 that can be operated by the terminal device 20 as operable robots based on the selection conditions acquired by the selection condition acquisition unit 11. Further, the operation target setting unit 12 sets one robot 30 among the selected operable robots as an operation target.
- the method of selecting one robot 30 as an operation target from the operable robots is performed by an arbitrary method. For example, among the robots 30 included in the operable robot, the most popular robot 30 may be selected, or the robot 30 (for example, from the area where the user lives or stays) may be selected according to the attributes of the user. The robot 30) placed at the farthest position may be selected, or the robot 30 may be selected according to the user's selection.
- the authority to operate the robot 30 is set in the terminal device 20.
- the operation target setting unit 12 makes it possible to switch the operation target from a certain robot 30 (for example, the robot 30a) to another robot 30 (for example, the robot 30b) among the above-mentioned operable robots.
- the operation target setting unit 12 enables (or switches) the operation target robot 30 to be switched, for example, when a predetermined switching condition is satisfied.
- Predetermined switching conditions include conditions relating to user input, movement of the robot 30, or elapsed time.
- the predetermined switching conditions are that the user has instructed to switch via the terminal device 20, that the position of the robot 30 being operated has reached the predetermined position, or that the operation time of the robot 30 being operated has been reached. Includes the condition that a predetermined time has passed.
- the operation target setting unit 12 refers to the database 15 in which information about the robot 30 is stored and managed in order to select a plurality of robots 30 as operable robots.
- the database 15 also stores and manages information on which robot 30 each terminal device 20 has the authority to operate.
- the operation target setting unit 12 sets or switches the operation target for the robot 30, the operation authority information for the robot 30 stored in the database 15 is also updated accordingly.
- the server device 10 For the processing of switching the operation target of the robot 30, for example, the server device 10 first obtains information (for example, an IP address) for connecting to the switching destination robot 30 based on the information of the operation authority as a terminal device. Upon transmission to 20, the terminal device 20 disconnects the communication session with the connected robot 30 based on the received information, and starts the process of connecting to the switching destination robot 30. As another example, when a system configuration in which communication for remote control is performed between the terminal device 20 and the robot 30 via the server device 10 is adopted, the server device 10 changes the operation authority. It is also possible to switch the robot 30 that communicates with the terminal device 20 based on the above.
- information for example, an IP address
- the operation target setting unit 12 selects an operable robot based on the selection condition by an arbitrary method. Three examples of how to select an operable robot will be described below. However, the method of selecting the operable robot is not limited to these.
- the operation target setting unit 12 identifies a robot 30 according to the above selection conditions with reference to the database 15, and is associated with the specified robot 30 and the specified robot 30. Operable robots can be selected to include the robot 30.
- the information about the robot 30 stored in the database 15 indicates that there is some relationship between a certain robot 30 and another robot 30, there is an association between the two robots 30. Is judged. For example, it is assumed that the robot 30a placed near the Picasso picture on the 1st floor of the museum A in Tokyo is specified according to the selection condition of "Picasso picture".
- the operation target setting unit 12 may select an operable robot so as to include the robot 30a and the robot 30b.
- the operation target setting unit 12 is an operable robot so as to include the robot 30 selected based on the information specified by the image recognition process for the image captured by the robot 30. Can be selected. For example, it is said that an image taken by a camera mounted on a robot 30a specified based on a selection condition (or being operated via a terminal device 20) includes a wine bottle placed in a wine department of a department store. do. In this case, the operation target setting unit 12 can be operated so as to specify the winery that produced the wine in the wine bottle based on the image recognition processing result for the image and include the robot 30b placed in the winery. You can choose a robot.
- the operation target setting unit 12 refers to an object existing in the vicinity of the robot 30 based on an image taken by the robot 30 specified based on the selection condition (or being operated via the terminal device 20).
- the operable robot can be selected to include the other associated robot 30.
- the image recognition process may be performed by the robot 30, and the information of the result of the image process may be transmitted to the server device 10.
- the server device 10 may receive the image taken by the robot 30 and perform image processing. The image processing itself may be performed in another device.
- the operation target setting unit 12 can select an operable robot so as to include a robot 30 classified into the same group specified according to a selection condition. For example, when the selection condition is "Paris", the operation target setting unit 12 selects the operable robot so as to include the robot 30 (belonging to) classified into the group related to "Paris".
- the robots 30 are classified into groups by any method.
- the operation target setting unit 12 assigns the robot 30 to a group according to the meta information (including information that can be associated with the robot 30 such as tag information or attribute information) preset for the robot 30.
- the classification may be determined.
- the meta information preset for the robot 30 may be acquired from the database 15 or may be acquired from the robot 30.
- the classification into groups may be determined according to the contents that the user can experience through the robot 30.
- the robot 30 placed in the aquarium may be classified into the group A
- the robot 30 placed in the shopping mall may be classified into the group B different from the group A.
- the information of the contents that the user can experience through the robot 30 may be acquired from the database 15 or may be acquired from the robot 30.
- the classification into groups may be determined based on the information specified by the image recognition process for the image captured by the robot 30.
- the robot 30c may be classified into the group C related to the clothing.
- the robot 30d may be classified into the group D related to the home electric appliance.
- the image recognition process may be performed by the robot 30, and the information of the result of the image process may be transmitted to the server device 10.
- the server device 10 may receive the image taken by the robot 30 and perform image processing. The image processing itself may be performed in another device.
- the display control unit 13 controls the display contents on the display units of the terminal device 20 and the robot 30. For example, the display control unit 13 determines the display content on the display unit of the terminal device 20 based on the information received by the server device 10 in response to the operation of the terminal device 20 by the user, and displays the information related to the display content to the terminal. By transmitting to the device 20, the display on the display unit of the terminal device 20 is controlled.
- the display control unit 13 displays, for example, an image for instructing the user to search for an operable robot by the terminal device 20 or an image for selecting the robot 30 to be operated on the display unit of the terminal device 20. Can be controlled. Further, the display control unit 13 displays an image for receiving an instruction to switch the operation target of the terminal device 20 from one robot 30 (for example, robot 30a) to another robot 30 (for example, robot 30b). It can be controlled to be displayed on the display unit of.
- the registration unit 14 is a processing unit that acquires information about the robot 30 from another processing unit of the server device 10 or stores it in the database 15, or updates or deletes the information stored in the database 15. be.
- the information about the robot 30 includes, for example, identification information of the robot 30, information about the place where the robot 30 is placed, information on the ability of the robot 30, reservation information for operation by the terminal device 20 of the robot 30, and the like.
- the database 15 stores various data such as data required for processing executed by the server device 10 and data generated or set by the processing.
- the information stored in the database 15 includes, for example, user information, information about the terminal device 20 used for operating the robot 30, information about the robot 30 (including the robot 30 in the real world and the robot 30 in the virtual world), and the robot. Includes information on the authority of 30 operations, reservation information for the operation, and the like.
- the database 15 stores image data of the landscape of the virtual world taken by a virtual camera by the robot 30 of the virtual world. The image data is transmitted to the terminal device 20 during operation by the terminal device 20 of the robot 30 in the virtual world.
- server device 10 Although the functions of the server device 10 have been described with reference to FIG. 5, some or all of the above-mentioned functions may be executed by the terminal device 20 or the robot 30.
- the selection condition acquisition unit 11 acquires information regarding the selection condition
- the operation target setting unit 12 is the first of the plurality of robots 30 selected according to the acquired selection condition.
- the robot 30 of 1 (for example, the robot 30a) is set as an operation target by the terminal device 20.
- the operation target setting unit 12 controls the operation target so as to be switchable from the first robot to the second robot 30 (for example, the robot 30b) among the plurality of selected robots 30 described above.
- the user can freely switch and operate the operation target robot 30 from among the plurality of robots 30 via the terminal device 20. Therefore, the user can experience a higher value experience as if he / she is in each place where the plurality of robots 30 are present, without moving to each of the plurality of places.
- This process starts when the user inputs information about the content to be experienced through the robot 30 to the terminal device 20a and the server device 10 receives the information.
- step S101 the server device 10 acquires the selection condition of the robot 30 to be operable by the terminal device 20a based on the information about the content to be experienced through the robot 30 received from the terminal device 20a.
- the server device 10 selects a plurality of robots 30 that can be operated by the terminal device 20 as operable robots based on the acquired selection conditions. For example, the robot 30a and the robot 30b are selected as operable robots. Further, the operation target setting unit 12 sets one robot 30 among the selected operable robots as an operation target. For example, among the robots 30a and 30b that are operable robots, the robot 30a is set as the operation target. After that, the user operates, for example, the robot 30a set as the operation target via the terminal device 20a. The user can move the robot 30a via the terminal device 20a and also view the images and sounds acquired by the camera and microphone mounted on the robot 30a.
- step S103 the server device 10 determines whether or not the predetermined switching condition of the robot 30 to be operated by the terminal device 20a is satisfied.
- the predetermined switching condition may include, for example, at least one of the conditions that the position of the robot 30 being operated has reached the predetermined position or that the user has instructed to switch via the terminal device 20.
- the process proceeds to step S104 (Yes in step S103).
- step S104 the server device 10 switches the operation target of the terminal device 20a to another robot 30 (for example, switching from the robot 30a to the robot 30b).
- the other robot 30 after switching is selected by an arbitrary method.
- a preset robot 30 may be selected, or may be selected according to user input.
- step S105 the server device 10 determines whether or not to end the operation of the robot 30 by the terminal device 20a.
- the server device 10 determines that the operation of the robot 30 is terminated when, for example, an instruction to end the operation of the robot 30 is received from the terminal device 20a, or when the preset operation end time is reached.
- the process shown in FIG. 6 is terminated, and in other cases, the process proceeds to step S103.
- FIG. 7 shows an example of an image displayed on the display unit of the terminal device 20a during the operation of the robot 30a.
- the image 70 includes an image of a landscape in a museum taken by a robot 30a and an image 71 of a button.
- the image 71 of the button "Would you like to see XX in Paris next?" Is displayed.
- the position of the robot 30a reaches a predetermined place (for example, near the exit of the museum).
- the image 71 of the button is displayed on the display unit of the terminal device 20a when the viewing time has elapsed (for example, 1 hour).
- the server device 10 determines that the predetermined switching condition is satisfied (Yes in step S103 of FIG. 6), and the robot 30 corresponding to the image 71 of the selected button (Yes).
- the operation target by the terminal device 20a is switched to the robot 30b) placed in the museum in Paris (step S104 in FIG. 6).
- the server device 10 acquires information regarding the selection conditions, and among the plurality of robots 30 selected according to the acquired selection conditions, the first robot 30 (for example, for example).
- the robot 30a) is set as an operation target by the terminal device 20.
- the server device 10 controls the operation target so as to be switchable from the first robot to the second robot 30 (for example, the robot 30b) among the plurality of selected robots 30 described above.
- the user can freely switch and operate the operation target robot 30 from among the plurality of robots 30 via the terminal device 20. Therefore, the user can experience a higher value experience as if he / she is in each place where the plurality of robots 30 are present, without moving to each of the plurality of places.
- an embodiment in which the selection condition is acquired and then the setting and switching of the robot to be operated has been described, but based on the selection condition acquired while operating the first robot, the embodiment has been described.
- the robot to be operated may be switched.
- the computer 700 mainly includes a processor 701, a memory 703, a storage device 705, an operation unit 707, an input unit 709, a communication unit 711, and a display device 713.
- the computer 700 does not have to include at least a part of these configurations.
- the computer 700 may include a general-purpose computer or another configuration generally provided by a dedicated computer. Further, the computer 700 does not have to include a part of the configurations shown in FIG.
- the processor 701 is a control unit that controls various processes in the computer 700 by executing a program stored in the memory 703. Therefore, the processor 701 realizes the function of each device described in the above-described embodiment by cooperating with the program and other configurations included in the computer 700, and controls the execution of the above-mentioned processing.
- the memory 703 is a storage medium such as, for example, a RAM (Random Access Memory).
- the program code of the program executed by the processor 701 and the data required for executing the program are temporarily read from the storage device 705 or the like, or stored in advance.
- the storage device 705 is a non-volatile storage medium such as a hard disk drive (HDD).
- the storage device 705 stores an operating system, various programs for realizing each of the above configurations, data of the above-mentioned processing results, and the like.
- the operation unit 707 is a device for receiving input from the user. Specific examples of the operation unit 707 include a keyboard, a mouse, a touch panel, a joystick, various sensors, a wearable device, and the like.
- the operation unit 707 may be detachably connected to the computer 700 via an interface such as USB (Universal Serial Bus).
- the input unit 709 is a device for inputting data from the outside of the computer 700.
- Specific examples of the input unit 709 include a drive device for reading data stored in various storage media.
- the input unit 709 may be detachably connected to the computer 700. In that case, the input unit 709 is connected to the computer 700 via an interface such as USB.
- the communication unit 711 is a device for performing data communication via a network with an external device of the computer 700 by wire or wirelessly.
- the communication unit 711 may be detachably connected to the computer 700. In that case, the communication unit 711 is connected to the computer 700 via an interface such as USB.
- the display device 713 is a device for displaying various information. Specific examples of the display device 713 include a liquid crystal display, an organic EL display, a display of a wearable device, and the like.
- the display device 713 may be detachably connected to the outside of the computer 700. In that case, the display device 713 is connected to the computer 700 via, for example, a display cable or the like. Further, when the touch panel is adopted as the operation unit 707, the display device 713 can be integrally configured with the operation unit 707.
- the robot 30 includes a processor 901, a RAM (Random Access Memory) 902, a ROM (Read only Memory) 903, a communication unit 904, an input unit 905, a display unit 906, a drive unit 907, and a camera 908.
- the configuration shown in FIG. 9 is an example, and the robot 30 may have configurations other than these, or may not have a part of these configurations.
- the robot 30 may further include a speaker, a microphone, and various sensors. Further, the robot 30 may include a unit for specifying the position of its own machine.
- the processor 901 is a calculation unit of the robot 30, and is, for example, a CPU (Central Processing Unit).
- the RAM 902 and the ROM 903 are storage units for storing data required for various processes and data of processing results.
- the robot 30 may include a large-capacity storage unit such as an HDD (Hard Disk Drive).
- the communication unit 904 is a device that communicates with an external device.
- the input unit 905 is a device for inputting data from the outside of the robot 30.
- the display unit 906 is a device for displaying various information.
- the processor 901 is a control unit that controls execution of a program stored in RAM 902 or ROM 903, calculates data, and processes data.
- the processor 901 executes a program (communication program) for controlling communication via the robot.
- the processor 901 receives various data from the input unit 905 and the communication unit 904, displays the calculation result of the data on the display unit 906, and stores the data in the RAM 902.
- the input unit 905 accepts data input from the user, and may include, for example, a keyboard and a touch panel. Further, the input unit 905 may include a microphone for voice input.
- the display unit 906 visually displays the calculation result by the processor 901, and may be configured by, for example, an LCD (Liquid Crystal Display).
- the display unit 906 may display an image taken by the camera 908 of the robot 30.
- the communication program may be stored and provided in a storage medium readable by a computer such as RAM 902 or ROM 903, or may be provided via a communication network connected by the communication unit 904.
- a computer such as RAM 902 or ROM 903
- various operations for controlling the robot 30 are realized by the processor 901 executing the communication program.
- the computer 900 may include an LSI (Large-Scale Integration) in which a processor 901 and a RAM 902 or a ROM 903 are integrated.
- the drive unit 907 includes an actuator that can be remotely controlled, and includes a moving unit such as a wheel, a manipulator, and the like.
- the drive unit 907 includes at least a moving unit such as a wheel, but may include a manipulator.
- the drive unit 907 includes at least a manipulator.
- the camera 908 includes an image sensor that captures a still image or a moving image, and transmits the captured still image or the moving image to an external device via the communication unit 904.
- the program for mounting the system 1 (or the server device 10, the terminal device 20, or the robot 30) in the present embodiment is recorded on various recording media such as an optical disk such as a CD-ROM, a magnetic disk, and a semiconductor memory. Can be done. It can also be installed or loaded on a computer by downloading the above program through a recording medium or via a communication network or the like.
- the present invention is not limited to the above-described embodiment, and can be carried out in various other forms without departing from the gist of the present invention.
- the above embodiments are merely examples in all respects and are not to be construed in a limited manner.
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Aviation & Aerospace Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Manipulator (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
より価値の高いエクスペリエンスの体感を可能にすることに関する技術を提供する。コンピュータが、選択条件に関する情報を取得することと、選択条件に応じて選択された固定されていない複数のロボットのうち、第1ロボットを端末装置による操作対象に設定することと、第1ロボットから、選択された複数のロボットのうち、第1ロボットとは異なる第2ロボットに操作対象を切り替え可能にすることと、を実施する。
Description
本発明は、情報処理装置、情報処理方法、及び記憶媒体に関する。
近年、インターネットを用いたテレビ会議システムが普及し、顔を見ながら話すだけでなく、遠隔地にいるユーザがカメラの向きや位置を操作することができるテレプレゼンスロボットが知られている。
特許文献1には、遠隔地にいるユーザに対して撮影画像を提供するカメラ付き移動体が記載されている。
従来のテレプレゼンスロボットは、ユーザがロボットを遠隔操作することで、ロボットがいわばユーザの分身として機能し、ユーザはロボットがいる場所におけるエクスペリエンスを体感できる。そのこと自体、ユーザにとって価値の高いことであるが、より価値の高いエクスペリエンスの体感への要望がある。しかしながら、従来のテレプレゼンスロボットでは、決められた特定のロボットをユーザが遠隔操作するため、体感できるエクスペリエンスに限界がある。
本発明の目的の一つは、ロボットを操作するユーザがより価値の高いエクスペリエンスの体感を可能にすることに関する技術を提供することにある。
本発明の一態様に係る情報処理装置は、プロセッサと記憶部とを備える情報処理装置であって、前記プロセッサは、前記記憶部に記憶されたプログラムを実行することにより、選択条件に関する情報を取得することと、前記選択条件に応じて選択された固定されていない複数のロボットのうち、第1ロボットを端末装置による操作対象に設定することと、前記操作対象を、前記第1ロボットから、前記選択された複数のロボットのうち、前記第1ロボットとは異なる第2ロボットに切り替え可能にすることと、を含む制御方法を実施するように構成されている。
本発明の一態様に係る情報処理方法は、コンピュータにより実施される情報処理方法であって、選択条件に関する情報を取得することと、前記選択条件に応じて選択された固定されていない複数のロボットのうち、第1ロボットを端末装置による操作対象に設定することと、前記操作対象を、前記第1ロボットから、前記選択された複数のロボットのうち、前記第1ロボットとは異なる第2ロボットに切り替え可能にすることとを含む。
本発明の一態様に係る記憶媒体は、コンピュータに、選択条件に関する情報を取得することと、前記選択条件に応じて選択された固定されていない複数のロボットのうち、第1ロボットを端末装置による操作対象に設定することと、前記操作対象を、前記第1ロボットから、前記選択された複数のロボットのうち、前記第1ロボットとは異なる第2ロボットに切り替え可能にすることとを含む情報処理方法を実行させるためのプログラムを記憶した記憶媒体。
本発明によれば、ロボットを操作するユーザがより価値の高いエクスペリエンスを体感することができる。
以下に、本発明の一実施形態について説明する。なお、以下の実施形態は、本発明を説明するための例示であり、本発明をその実施の形態のみに限定する趣旨ではない。また、本発明は、その要旨を逸脱しない限り、さまざまな変形が可能である。さらに、当業者であれば、以下に述べる各要素を均等なものに置換した実施の形態を採用することが可能であり、かかる実施の形態も本発明の範囲に含まれる。
<システムの構成>
図1及び図2を参照して、一実施形態に係るシステム1の例示的な構成について説明する。本実施形態において、システム1は、ユーザが端末装置を介して1つ又は複数のロボットを遠隔操作することを可能にする。複数のロボットは、それぞれ異なる場所に置かれている。ユーザは、1つの端末装置を介してあるロボットを操作しているときに、操作対象のロボットを切り替えて、他のロボットを操作することが可能である。
図1及び図2を参照して、一実施形態に係るシステム1の例示的な構成について説明する。本実施形態において、システム1は、ユーザが端末装置を介して1つ又は複数のロボットを遠隔操作することを可能にする。複数のロボットは、それぞれ異なる場所に置かれている。ユーザは、1つの端末装置を介してあるロボットを操作しているときに、操作対象のロボットを切り替えて、他のロボットを操作することが可能である。
図1に示すように、システム1は、サーバ装置10、端末装置20a,20b,20c、及びロボット30a,30b,30cを備える。各装置又はロボットは、他の装置又はロボットと、無線若しくは有線により(又はその両者により)通信可能に構成されている。図1に示す例において、システム1は、3つの端末装置を備えるが、端末装置の数は任意に設定され、2つ以下でも4つ以上であってもよい。端末装置20a,20b,20cは、それぞれ同様の構成を有してもよいし、異なる構成を有してもよい。本実施形態において、端末装置20a,20b,20cが互いに区別せずに参照される場合は、総称して端末装置20と称される。また、システム1は、3つのロボットを備えるが、ロボットの数は任意に設定され、2つ以下でも4つ以上であってもよい。ロボット30a,30b,30cは、それぞれ同様の構成を有してもよいし、異なる構成を有してもよい。本実施形態において、ロボット30a,30b,30cを互いに区別せずに参照する場合は、総称してロボット30と称される。以下に、それぞれの装置及びロボットの概要を説明する。
サーバ装置10は、端末装置20から複数のロボット30を遠隔操作することに関し、各種の処理を実行する装置である。サーバ装置10はさらに、利用可能なロボット30の検索処理や、ロボット30の操作のための予約登録の管理等を行う。サーバ装置10は、サーバコンピュータなどの情報処理装置により構成される。サーバ装置10は、1つの情報処理装置により構成されてもよいし、複数の情報処理装置(例えば、クラウドコンピューティング又はエッヂコンピューティング)により構成されてもよい。
端末装置20は、ロボット30の操作や、当該操作の予約のために、ユーザにより使用される情報処理装置である。端末装置20は、例えば、スマートフォン、タブレット端末、PDA(Personal Digital Assistants)、パーソナルコンピュータ、ヘッドマウントディスプレイ、特定用途の操作系などの汎用又は専用の情報処理装置である。ロボット30の操作の予約のために使用される端末装置20は、当該操作のために使用される端末装置20と異なる装置であってもよいし、同じ装置であってもよい。
ロボット30は、固定されていないロボットである。ロボット30が固定されていないとは、ロボット30が車輪等による移動のための駆動部を有する移動型である場合と、人が装着でき、マニピュレータ等の動作のための駆動部を有する装着型である場合とを含む。
移動型のロボットは、例えば特許文献1に示されている。移動型ロボットの移動部は、一輪、二輪又は多輪により走行するもの、キャタピラにより走行するもの、レールの上を走行するもの、飛び跳ねて移動するもの、二足歩行、四足歩行又は多足歩行するもの、スクリューにより水上又は水中を航行するもの及びプロペラ等により飛行するものを含む。装着型のロボットは、例えばMHD Yamen Saraiji, Tomoya Sasaki, Reo Matsumura, Kouta Minamizawa and Masahiko Inami, "Fusion: full body surrogacy for collaborative communication," Proceeding SIGGRAPH '18 ACM SIGGRAPH 2018 Emerging Technologies Article No. 7.にて公開されている。さらに、ロボット30は、自動走行又は半自動走行可能な車両や重機であったり、ドローンや飛行機であったりを含む。また、ロボット30は、スポーツスタジアム等に設置され、レールの上を移動可能なカメラを備えたロボットを含む。また、ロボット30は、宇宙空間に打ち上げられる衛星型ロボットであって、姿勢制御やカメラの撮影方向の制御が可能なロボットを含む。また、ロボット30は、いわゆるテレプレゼンスロボットやアバターロボットであってよい。
図2に示すように、ユーザは端末装置20を介してロボット30の遠隔操作(例えば、ロボット30の移動やロボット30に搭載されたカメラの操作)を行うことができる。端末装置20とロボット30の間の操作信号又はデータの送受信のための通信アーキテクチャは、任意のアーキテクチャを採用可能であり、例えば、P2P(Peer-to-Peer)又はクライアントサーバである。ロボット30は、端末装置20から受信した信号に応じて動作し、ロボット30に搭載されたカメラ、マイク及びその他の装置を通じて取得された画像データ及び音声データなど、ロボット30がいる場所に関してロボット30が取得又は検知等したデータを端末装置20に送信する。これにより、ユーザは、端末装置20及びロボット30を介して、ロボット30がいる場所に自分もいるかのようなエクスペリエンスを体感することができる。
<ロボット操作の概要>
図3及び図4を参照して、本実施形態におけるロボット操作の概要を説明する。ここで説明されるロボット操作の方法は、一例に過ぎず、他の方法を妨げるものではない。
図3及び図4を参照して、本実施形態におけるロボット操作の概要を説明する。ここで説明されるロボット操作の方法は、一例に過ぎず、他の方法を妨げるものではない。
図3には、ユーザが使用する端末装置20aと、ロボット群とが概念的に示されている。図3に示すロボット群は、端末装置20aにより操作可能な複数のロボット30の集まりである。ロボット群には、それぞれ異なる場所に位置するロボット30a、ロボット30b、・・・、ロボット30n(nは3以上の整数。)が含まれている。
1つのロボット群に含まれる複数のロボット30は、同じ場所ではなく、異なる場所、例えば、互いに所定距離以上離れた場所に存在するロボット30が含まれるように設定されてもよい。所定距離は、例えば、10m、100m、1km、又は100kmであってもよい。異なる場所の他の例は、同じ施設における異なるフロア、同じ施設における異なるセクション、異なる施設、異なる行政区画、又は異なるタイムゾーンを含む。
1つのロボット群に含まれる複数のロボット30は、例えば、予め関連付けられた複数のロボット30、又は所定の条件で分類されたグループのうち、同じグループに属する複数のロボット30を含む。ここで、複数のロボット30のうち少なくとも一部は、バーチャル(仮想世界)に存在するロボットであってもよい。すなわち、複数のロボット30は、現実世界に存在するロボットと、仮想世界に存在するロボットとを含んでもよい。
ユーザは、端末装置20aを介して、ロボット群に含まれる複数のロボット30の中から操作対象のロボット30を自由に切り替えて操作することができる。操作対象のロボット30の切り替えは、ユーザの操作に応じて行われてもよいし、予め設定された条件を満たしたことに応じて自動的に行われてもよい。ここで、例えば、第1のロボット30iから第2のロボット30jへの操作対象の切り替え処理は、端末装置20と第1のロボット30iとの通信セッションの切断と、端末装置20と第2のロボット30jとの通信セッションの確立とを、端末装置20が順次、又は略同時に実行することで実現される。また、操作対象のロボット30の切り替えのために、ロボット30は、例えば、切り替え先のロボット30に接続するための情報(例えば、IPアドレス)をサーバ装置10から受信し、ユーザの操作に応じて又は自動的に、操作のために接続中のロボット30との通信セッションを切断し、切り替え先のロボット30に接続する処理を開始する。なお、ロボット30は、切り替え先のロボット30に接続するための情報を予め自機に記憶し、当該情報を使用して切り替え先のロボット30に接続する処理を開始してもよい。また、遠隔操作のための通信アーキテクチャとしてクライアントサーバを採用し、サーバ装置10を介して端末装置20とロボット30とが通信している場合、サーバ装置10は、ユーザの操作に応じて又は自動的に、操作のために接続中の端末装置20とロボット30の間の通信セッションを切断し、切り替え先のロボット30と端末装置20との間の通信セッションを接続する処理を開始してもよい。
このように、本実施形態によれば、ユーザは、端末装置20aを介して、複数のロボット30の中から操作対象のロボット30を自由に切り替えて操作を行うことができる。そのため、ユーザは、複数の場所のそれぞれに移動することなく、複数のロボット30がいるそれぞれの場所に自分もいるかのようなエクスペリエンスを体感することが可能である。
図4を参照して、操作対象のロボット30の切り替え方法の例を説明する。図4には、操作対象のロボット30の切り替えが時系列に概念的に示されている。まず、時間t1において、ユーザは、所定のロボット群から選択されたロボット30aを、端末装置20aを介して操作することにより、ロボット30aを走行パスA1に沿って移動させる。所定のロボット群とは、何らかの条件を満たした複数のロボット30(例えば、ロボット30のデータベースをキーワード検索した結果、ヒットした複数のロボット30、又は何らかのテーマで予め同じカテゴリにグループ化された複数のロボット30など)である。ロボット30aの操作の間、端末装置20aの表示部には、ロボット30aのカメラにより撮影された映像(走行パスA1で撮影された映像)が表示される。その後、時間t2において、ロボット30aが所定の切り替えポイントに到達したときに、例えば、自動的に又はユーザ操作に応じて、端末装置20aによる操作対象がロボット30aからロボット30bに切り替わる。
その後、時間t3において、ユーザは、端末装置20aを介して操作することにより、ロボット30bを走行パスA2に沿って移動させる。その間、端末装置20aの表示部には、ロボット30bのカメラにより撮影された映像(走行パスA2で撮影された映像)が表示される。その後、時間t4において、ロボット30bが所定の切り替えポイントに到達したときに、例えば、自動的に又はユーザ操作に応じて、端末装置20aによる操作対象がロボット30bからロボット30nに切り替わる。
図4を参照して説明した例において、ロボット30a及びロボット30bは現実世界に存在するロボットであり、ロボット30nは仮想世界に存在するロボットであってもよい。この場合において、ロボット30a及びロボット30bの操作時には、ロボット30a及びロボット30bにより撮影された現実世界の風景画像が端末装置20aの表示部に表示される。また、ロボット30nの操作時には、ロボット30nの仮想的なカメラにより撮影された仮想世界の風景画像が端末装置20aの表示部に表示される。
このように、本実施形態によれば、ユーザは、端末装置20aを介して、複数のロボット30がいるそれぞれの場所に瞬時に移動して、自分もその場にいるかのようなエクスペリエンスを体感することが可能である。例えば、図4の例において、ロボット30aが東京の美術館に置かれ、ロボット30bがパリの美術館に置かれ、仮想的なロボット30cが仮想世界の美術館に置かれているとする。この場合において、ユーザは、自身は実際には移動することなく端末装置20aを介して、例えば、東京の美術館で美術鑑賞の後、パリの美術館で美術鑑賞を行い、その後、仮想世界の美術館で美術鑑賞を行うことができる。
<機能構成>
図5を参照して、サーバ装置10が有する主な機能の構成を説明する。これらの機能は、サーバ装置10が有する制御部(プロセッサ)が、記憶部に記憶されたコンピュータプログラムを読み込み、実行することにより実現される。これらの装置のハードウェア構成については、後述する。
図5を参照して、サーバ装置10が有する主な機能の構成を説明する。これらの機能は、サーバ装置10が有する制御部(プロセッサ)が、記憶部に記憶されたコンピュータプログラムを読み込み、実行することにより実現される。これらの装置のハードウェア構成については、後述する。
図5に示すように、サーバ装置10は、主な機能の構成として、選択条件取得部11、操作対象設定部12、表示制御部13、登録部14、及びデータベース15を有する。サーバ装置10が有する機能は、これらに限定されず、コンピュータが一般的に有する機能、及び他の機能を有してもよい。
選択条件取得部11は、ある端末装置20(例えば、端末装置20a)により操作可能に設定するロボット30の選択条件を取得する。選択条件は、ユーザによりロボット30を通じて体験可能な内容に関する情報を含む。選択条件は、任意の方法により取得される。
例えば、選択条件は、端末装置20aにより操作可能なロボット30の選択条件は、端末装置20aに対するユーザ入力に基づいて取得される。この場合において、例えば、「ピカソ」と端末装置20aに対してユーザ入力された場合、まず、サーバ装置10は、端末装置20aから当該ユーザ入力に基づく情報を受信する。その後、サーバ装置10が受信した当該情報に基づいて、選択条件取得部11は、ロボット30の選択条件として、ピカソの絵画が置かれた美術館に位置する(又は、ピカソの絵画付近に位置する)という条件(すなわち、ピカソに関する体験が可能である場所という条件)を取得(または設定)してもよい。また、他の例として、端末装置20aに対して「ショッピング」とユーザ入力された場合、ショッピングが可能な施設(例えば、デパート)のうち、予めお薦めとして設定された施設に位置するという条件が、ロボット30の選択条件として取得されてもよい。端末装置20aに対するユーザ入力は、ユーザによるタイピングなどによる手入力、音声入力、又はその他の任意の方法の入力を含む。
操作対象設定部12は、選択条件取得部11により取得された選択条件に基づいて、端末装置20により操作可能な複数のロボット30を操作可能ロボットとして選択する。また、操作対象設定部12は、選択された操作可能ロボットのうち、1つのロボット30を操作対象として設定する。
操作可能ロボットから1つのロボット30を操作対象として選択する方法は、任意の方法により行われる。例えば、操作可能ロボットに含まれるロボット30のうち、最も人気のあるロボット30が選択されてもよいし、ユーザの属性に応じてロボット30(例えば、ユーザが住んでいる又は滞在している地域から最も遠い位置に置かれたロボット30)が選択されてもよいし、ユーザによる選択に応じてロボット30が選択されてもよい。操作対象として、あるロボット30が設定されると、当該ロボット30を操作する権限が端末装置20に設定される。さらに、操作対象設定部12は、操作対象を、あるロボット30(例えば、ロボット30a)から、上記の操作可能ロボットのうち、他のロボット30(例えば、ロボット30b)に切り替え可能にする。操作対象設定部12は、例えば、所定の切り替え条件が満たされたときに、操作対象のロボット30の切り替え可能にする(又は、切り替える)。所定の切り替え条件は、ユーザ入力、ロボット30の移動、又は経過時間に関する条件を含む。例えば、所定の切り替え条件は、端末装置20を介してユーザより切り替えの指示を受けたこと、操作中のロボット30の位置が所定の位置に到達したこと、又は操作中のロボット30の操作時間が所定時間経過したこと、という条件を含む。
操作対象設定部12は、操作可能ロボットとして、複数のロボット30の選択のために、ロボット30についての情報が記憶管理されたデータベース15を参照する。データベース15は、各端末装置20が、どのロボット30についての操作の権限を有するかの情報も記憶管理する。操作対象設定部12がロボット30についての操作対象の設定又は切り替えを行うと、それに伴って、データベース15に記憶されたロボット30についての操作権限の情報も更新される。
ロボット30の操作対象の切り替えの処理のために、例えば、まず、サーバ装置10は、操作権限の情報に基づいて、切り替え先のロボット30に接続するための情報(例えば、IPアドレス)を端末装置20に送信し、端末装置20は、受信した情報に基づいて、接続中のロボット30との通信セッションを切断し、切り替え先のロボット30に接続する処理を開始する。他の例として、サーバ装置10を介して端末装置20とロボット30との間で遠隔操作のための通信をしているシステム構成を採用している場合に、サーバ装置10は、操作権限の変更に基づいて、端末装置20と通信するロボット30を切り替えることも可能である。
以下に、操作対象設定部12による操作可能ロボットの選択方法についてさらに説明する。操作対象設定部12による選択条件に基づく操作可能ロボットの選択は、任意の方法により行われる。操作可能ロボットの選択の方法の3つの例を以下に説明する。しかしながら、操作可能ロボットの選択の方法はこれらに限定されない。
(1)関連するロボットを選択
操作対象設定部12は、データベース15を参照して、上記の選択条件に応じたロボット30を特定し、当該特定したロボット30と、当該特定したロボット30に関連付けられるロボット30を含むように、操作可能ロボットを選択することができる。本実施形態において、データベース15に記憶されたロボット30に関する情報が、あるロボット30と他のロボット30との間に何らかの関連性があることを示す場合、当該2つのロボット30の間に関連付けがあると判断される。例えば、「ピカソの絵」という選択条件に応じて、東京の美術館Aの1Fのピカソの絵の付近に置かれたロボット30aが特定されたとする。この場合において、美術館Aの2Fに置かれたロボット30bは、ロボット30aと同じ美術館に置かれているという点で関連性があるため、ロボット30aとロボット30bとは関連付けられていると判断されてもよい。すなわち、この例において、操作対象設定部12は、ロボット30aとロボット30bを含むように操作可能ロボットを選択してもよい。
操作対象設定部12は、データベース15を参照して、上記の選択条件に応じたロボット30を特定し、当該特定したロボット30と、当該特定したロボット30に関連付けられるロボット30を含むように、操作可能ロボットを選択することができる。本実施形態において、データベース15に記憶されたロボット30に関する情報が、あるロボット30と他のロボット30との間に何らかの関連性があることを示す場合、当該2つのロボット30の間に関連付けがあると判断される。例えば、「ピカソの絵」という選択条件に応じて、東京の美術館Aの1Fのピカソの絵の付近に置かれたロボット30aが特定されたとする。この場合において、美術館Aの2Fに置かれたロボット30bは、ロボット30aと同じ美術館に置かれているという点で関連性があるため、ロボット30aとロボット30bとは関連付けられていると判断されてもよい。すなわち、この例において、操作対象設定部12は、ロボット30aとロボット30bを含むように操作可能ロボットを選択してもよい。
(2)ロボットが撮影した画像に基づいた選択
操作対象設定部12は、ロボット30が撮像した画像に対する画像認識処理により特定された情報に基づいて選択されたロボット30を含むように、操作可能ロボットを選択することができる。例えば、選択条件に基づいて特定された(又は、端末装置20を介して操作中の)ロボット30aが搭載するカメラにより撮影した画像に、デパートのワイン売り場に置かれたワインボトルが含まれていたとする。この場合に、操作対象設定部12は、当該画像に対する画像認識処理結果に基づいて、当該ワインボトルのワインを製造したワイナリーを特定し、当該ワイナリーに置かれたロボット30bを含むように、操作可能ロボットを選択することができる。すなわち、操作対象設定部12は、選択条件に基づいて特定された(又は、端末装置20を介して操作中の)ロボット30が撮影した画像に基づいて、当該ロボット30に付近に存在するオブジェクトに関連付けられた他のロボット30を含むように、操作可能ロボットを選択することができる。なお、画像認識処理はロボット30において行われて、当該画像処理の結果の情報がサーバ装置10に送信されてもよい。もしくは、サーバ装置10がロボット30により撮影された画像を受信し、画像処理を行ってもよい。画像処理自体は、その他の装置において行われてもよい。
操作対象設定部12は、ロボット30が撮像した画像に対する画像認識処理により特定された情報に基づいて選択されたロボット30を含むように、操作可能ロボットを選択することができる。例えば、選択条件に基づいて特定された(又は、端末装置20を介して操作中の)ロボット30aが搭載するカメラにより撮影した画像に、デパートのワイン売り場に置かれたワインボトルが含まれていたとする。この場合に、操作対象設定部12は、当該画像に対する画像認識処理結果に基づいて、当該ワインボトルのワインを製造したワイナリーを特定し、当該ワイナリーに置かれたロボット30bを含むように、操作可能ロボットを選択することができる。すなわち、操作対象設定部12は、選択条件に基づいて特定された(又は、端末装置20を介して操作中の)ロボット30が撮影した画像に基づいて、当該ロボット30に付近に存在するオブジェクトに関連付けられた他のロボット30を含むように、操作可能ロボットを選択することができる。なお、画像認識処理はロボット30において行われて、当該画像処理の結果の情報がサーバ装置10に送信されてもよい。もしくは、サーバ装置10がロボット30により撮影された画像を受信し、画像処理を行ってもよい。画像処理自体は、その他の装置において行われてもよい。
(3)グループに基づく選択
操作対象設定部12は、選択条件に応じて特定される同じグループに分類されるロボット30を含むように、操作可能ロボットを選択することができる。例えば、選択条件が「パリ」である場合、操作対象設定部12は、「パリ」に関連するグループに分類される(属する)ロボット30を含むように、操作可能ロボットを選択する。
操作対象設定部12は、選択条件に応じて特定される同じグループに分類されるロボット30を含むように、操作可能ロボットを選択することができる。例えば、選択条件が「パリ」である場合、操作対象設定部12は、「パリ」に関連するグループに分類される(属する)ロボット30を含むように、操作可能ロボットを選択する。
ロボット30のグループへの分類は、任意の方法により行われる。例えば、操作対象設定部12は、ロボット30に対して予め設定されたメタ情報(タグ情報、又は属性情報など、ロボット30に対応付け可能な情報を含む)に応じて、ロボット30のグループへの分類を決定してもよい。ロボット30に対して予め設定されたメタ情報は、データベース15から取得されてもよいし、ロボット30から取得されてもよい。
また、グループへの分類は、ユーザがロボット30を通じて体験可能な内容に応じて決定されてもよい。この場合において、例えば、水族館に置かれたロボット30はグループAに分類され、ショッピングモールに置かれたロボット30はグループAとは異なるグループBに分類されてもよい。ユーザがロボット30を通じて体験可能な内容の情報は、データベース15から取得されてもよいし、ロボット30から取得されてもよい。
また、グループへの分類は、ロボット30が撮像した画像に対する画像認識処理により特定された情報に基づいて決定されてもよい。この場合において、例えば、デパートにおいて、ロボット30cが撮像した画像に対する画像認識処理により、衣料品が認識された場合に、ロボット30cは衣料品に関係するグループCに分類されてもよい。また、デパートにおいて、ロボット30dが撮像した画像に対する画像認識処理により、家電製品が認識された場合に、ロボット30dは家電製品に関係するグループDに分類されてもよい。なお、画像認識処理はロボット30において行われて、当該画像処理の結果の情報がサーバ装置10に送信されてもよい。もしくは、サーバ装置10がロボット30により撮影された画像を受信し、画像処理を行ってもよい。画像処理自体は、その他の装置において行われてもよい。
表示制御部13は、端末装置20及びロボット30の表示部への表示内容を制御する。例えば、表示制御部13は、ユーザによる端末装置20に対する操作に応じてサーバ装置10が受信した情報に基づいて、端末装置20の表示部への表示内容を決定し、当該表示内容に関する情報を端末装置20へ送信することにより、端末装置20の表示部への表示を制御する。
表示制御部13は、例えば、ユーザが端末装置20による操作可能ロボットの検索を指示するための画像、又は操作対象のロボット30を選択するための画像を端末装置20の表示部に表示するように制御することができる。また、表示制御部13は、端末装置20による操作対象を、あるロボット30(例えば、ロボット30a)から他のロボット30(例えば、ロボット30b)への切り替えの指示を受け付けるための画像を端末装置20aの表示部に表示するように制御することができる。
登録部14は、ロボット30に関する情報をサーバ装置10の他の処理部、又は他の装置から取得し、データベース15へ記憶し、又はデータベース15に記憶された情報の更新又は削除を行う処理部である。ロボット30に関する情報は、例えば、ロボット30の識別情報、ロボット30が置かれた場所に関する情報、ロボット30の能力の情報、ロボット30の端末装置20による操作の予約情報等を含む。
データベース15は、サーバ装置10において実行される処理に必要なデータ、並びに当該処理により生成又は設定されたデータなど、各種データを記憶する。データベース15に記憶される情報は、例えば、ユーザ情報、ロボット30の操作に使用される端末装置20に関する情報、ロボット30(現実世界のロボット30及び仮想世界のロボット30を含む。)に関する情報、ロボット30の操作の権限に関する情報、当該操作の予約情報等を含む。また、データベース15は、仮想世界のロボット30による仮想的なカメラにより撮影される当該仮想世界の風景の画像データを記憶する。当該画像データは、仮想世界のロボット30の端末装置20による操作中に、端末装置20に送信される。
図5を参照してサーバ装置10が有する機能の説明をしたが、上述した機能の一部又は全てが、端末装置20又はロボット30により実行されてもよい。
以上のように本実施形態によれば、選択条件取得部11は選択条件に関する情報を取得し、操作対象設定部12は取得された選択条件に応じて選択された複数のロボット30のうち、第1のロボット30(例えば、ロボット30a)を端末装置20による操作対象に設定する。また、操作対象設定部12は、操作対象を、第1のロボットから、上記の選択された複数のロボット30のうち、第2のロボット30(例えば、ロボット30b)に切り替え可能に制御する。その結果、ユーザは、端末装置20を介して、複数のロボット30の中から操作対象のロボット30を自由に切り替えて操作を行うことができる。そのため、ユーザは、複数の場所のそれぞれに移動することなく、複数のロボット30がいるそれぞれの場所に自分もいるかのようなより価値の高いエクスペリエンスを体感することが可能である。
<処理フロー>
図6を参照して、システム1における処理フローの一例として、端末装置20による操作対象のロボット30の設定と、操作対象の切り替えのための処理の例を説明する。この処理は、サーバ装置10及び端末装置20において、プロセッサが、記憶部に記憶されたコンピュータプログラムを読み込み、実行することにより実現される。なお、この処理における各処理ステップについて、既に詳細を説明しているものについては、ここでは詳細な説明を省略する。
図6を参照して、システム1における処理フローの一例として、端末装置20による操作対象のロボット30の設定と、操作対象の切り替えのための処理の例を説明する。この処理は、サーバ装置10及び端末装置20において、プロセッサが、記憶部に記憶されたコンピュータプログラムを読み込み、実行することにより実現される。なお、この処理における各処理ステップについて、既に詳細を説明しているものについては、ここでは詳細な説明を省略する。
この処理は、ユーザが端末装置20aに対して、ロボット30を通じて体験したい内容に関する情報を入力し、サーバ装置10が、当該情報を受信したときに開始する。
ステップS101において、サーバ装置10は、端末装置20aから受信したロボット30を通じて体験したい内容に関する情報に基づいて、端末装置20aにより操作可能に設定するロボット30の選択条件を取得する。
次に、ステップS102において、サーバ装置10は、取得された選択条件に基づいて、端末装置20により操作可能な複数のロボット30を操作可能ロボットとして選択する。例えば、ロボット30a及びロボット30bが操作可能ロボットとして選択される。また、操作対象設定部12は、選択された操作可能ロボットのうち、1つのロボット30を操作対象として設定する。例えば、操作可能ロボットであるロボット30a及びロボット30bのうち、ロボット30aが操作対象として設定される。その後、ユーザは、端末装置20aを介して、操作対象として設定された例えばロボット30aを操作する。ユーザは、端末装置20aを介して、ロボット30aを移動させ、また、ロボット30aに搭載されたカメラ及びマイクにより取得された画像及び音声を視聴することができる。
その後、ステップS103において、サーバ装置10は、端末装置20aによる操作対象のロボット30の所定の切り替え条件が満たされたか否かを判断する。所定の切り替え条件は、例えば、操作中のロボット30の位置が所定の位置に到達したこと、又は端末装置20を介してユーザより切り替えの指示を受けたことという条件の少なくとも一方を含んでもよい。所定の切り替え条件が満たされた場合、処理はステップS104へ進む(ステップS103のYes)。
ステップS104において、サーバ装置10は、端末装置20aによる操作対象を他のロボット30に切り替える(例えば、ロボット30aからロボット30bに切り替える)。切り替え後の他のロボット30は、任意の方法により選択される。例えば、予め設定されたロボット30が選択されてもよいし、ユーザ入力に応じて選択されてもよい。
次に、ステップS105において、サーバ装置10は、端末装置20aによるロボット30の操作を終了するか否かを判断する。サーバ装置10は、例えば、端末装置20aからロボット30の操作終了の指示を受け付けたとき、又は予め設定された操作終了時間に達したときに、ロボット30の操作を終了すると判断する。ロボット30の操作を終了すると判断された場合、図6に示す処理は終了し、他の場合、処理はステップS103に進む。
図7を参照して、図6のステップS103及びS104による処理の例を説明する。図7は、ロボット30aの操作中に、端末装置20aの表示部に表示された画像の例を示している。図7に示すように、画像70は、ロボット30aにより撮影された美術館内の風景の画像と、ボタンの画像71とを含む。ボタンの画像71には、「次はパリの〇〇〇を見ますか?」と表示されている。例えば、ユーザが端末装置20aを介してロボット30aを操作し、東京の美術館に展示された絵画を鑑賞している状況において、ロボット30aの位置が所定の場所(例えば、美術館の出口付近)に達したとき、又は鑑賞時間が所定時間(例えば、1時間)を経過したときに、端末装置20aの表示部に、ボタンの画像71が表示される。ボタンの画像71がユーザにより選択されると、サーバ装置10は、所定の切り替え条件が満たされたと判断し(図6のステップS103のYes)、選択されたボタンの画像71に対応するロボット30(例えば、パリの美術館に置かれたロボット30b)に端末装置20aによる操作対象を切り替える(図6のステップS104)。
以上のように本実施形態によれば、サーバ装置10は、選択条件に関する情報を取得し、取得された選択条件に応じて選択された複数のロボット30のうち、第1のロボット30(例えば、ロボット30a)を端末装置20による操作対象に設定する。また、サーバ装置10は、操作対象を、第1のロボットから、上記の選択された複数のロボット30のうち、第2のロボット30(例えば、ロボット30b)に切り替え可能に制御する。その結果、ユーザは、端末装置20を介して、複数のロボット30の中から操作対象のロボット30を自由に切り替えて操作を行うことができる。そのため、ユーザは、複数の場所のそれぞれに移動することなく、複数のロボット30がいるそれぞれの場所に自分もいるかのようなより価値の高いエクスペリエンスを体感することが可能である。なお、ここでは、選択条件を取得してから、操作対象のロボットの設定および切り替えをする実施形態について説明したが、第1のロボットを操作しているときに取得された選択条件に基づいて、操作対象のロボットを切り替えるものとしてよい。
<コンピュータのハードウェア構成>
次に、図8を参照して、本実施形態におけるサーバ装置10及び端末装置20を実装するためのコンピュータ(情報処理装置)の例示的なハードウェア構成を説明する。
次に、図8を参照して、本実施形態におけるサーバ装置10及び端末装置20を実装するためのコンピュータ(情報処理装置)の例示的なハードウェア構成を説明する。
図8に示すように、コンピュータ700は、主な構成として、プロセッサ701と、メモリ703と、記憶装置705と、操作部707と、入力部709と、通信部711、及び表示装置713を備える。コンピュータ700は、これらの構成のうち、少なくとも一部を備えなくてもよい。また、コンピュータ700は、これらの構成以外に、汎用コンピュータ又は専用コンピュータが一般的に備える他の構成を備えてもよい。また、コンピュータ700は、図8に示した構成のうち、一部を備えなくてもよい。
プロセッサ701は、メモリ703に記憶されているプログラムを実行することによりコンピュータ700における各種の処理を制御する制御部である。従って、プロセッサ701は、コンピュータ700が備える他の構成と、プログラムとの協働により、上記の実施形態で説明した各装置の機能を実現し、上記の処理の実行を制御する。
メモリ703は、例えばRAM(Random Access Memory)等の記憶媒体である。メモリ703には、プロセッサ701によって実行されるプログラムのプログラムコードや、プログラムの実行時に必要となるデータが記憶装置705等から一時的に読みだされて、又は予め記憶されている。
記憶装置705は、例えばハードディスクドライブ(HDD)等の不揮発性の記憶媒体である。記憶装置705は、オペレーティングシステム、上記各構成を実現するための各種プログラム、上述した処理結果のデータ等を記憶する。
操作部707は、ユーザからの入力を受け付けるためのデバイスである。操作部707の具体例としては、キーボード、マウス、タッチパネル、ジョイスティック、各種センサ、ウェアラブルデバイス等が挙げられる。操作部707は、例えばUSB(Universal Serial Bus)等のインタフェースを介してコンピュータ700に取り外し可能に接続されても良い。
入力部709は、コンピュータ700の外部からデータを入力するためのデバイスである。入力部709の具体例としては、各種記憶媒体に記憶されているデータを読み取るためのドライブ装置等がある。入力部709は、コンピュータ700に取り外し可能に接続されてもよい。その場合、入力部709は、例えばUSB等のインタフェースを介してコンピュータ700へと接続される。
通信部711は、コンピュータ700の外部の装置と有線又は無線により、ネットワークを介したデータ通信を行うための装置である。通信部711は、コンピュータ700に取り外し可能に接続されてもよい。その場合、通信部711は、例えばUSB等のインタフェースを介してコンピュータ700に接続される。
表示装置713は、各種情報を表示するためのデバイスである。表示装置713の具体例としては、例えば液晶ディスプレイや有機ELディスプレイ、ウェアラブルデバイスのディスプレイ等が挙げられる。表示装置713は、コンピュータ700の外部に取り外し可能に接続されてもよい。その場合、表示装置713は、例えばディスプレイケーブル等を介してコンピュータ700に接続される。また、操作部707としてタッチパネルが採用される場合には、表示装置713は、操作部707と一体化して構成することが可能である。
次に、図9を参照して、本実施形態におけるロボット30(仮想世界に存在するロボット30を除く。)に搭載されるコンピュータ(情報処理装置)及びその他の主な構成の例示的なハードウェア構成を説明する。ロボット30は、プロセッサ901、RAM(Random Access Memory)902、ROM(Read only Memory)903、通信部904、入力部905、表示部906、駆動部907、及びカメラ908を備える。図9に示す構成は一例であり、ロボット30はこれら以外の構成を有してもよいし、これらの構成のうち一部を有さなくてもよい。例えば、ロボット30は、スピーカ、マイク、及び各種センサをさらに備えてもよい。また、ロボット30は、自機の位置を特定するためのユニットを備えてもよい。
プロセッサ901は、ロボット30の演算部であり、例えば、CPU(Central Processing Unit)である。RAM902及びROM903は、各種処理に必要なデータ及び処理結果のデータを記憶する記憶部である。ロボット30は、RAM902及びROM903以外に、HDD(Hard Disk Drive)などの大容量の記憶部を備えてもよい。通信部904は、外部装置との通信を行うデバイスである。入力部905は、ロボット30の外部からデータを入力するためのデバイスである。表示部906は、各種情報を表示するためのデバイスである。
プロセッサ901は、RAM902又はROM903に記憶されたプログラムの実行に関する制御やデータの演算、加工を行う制御部である。プロセッサ901は、ロボットを介したコミュニケーションを制御するプログラム(コミュニケーションプログラム)を実行する。プロセッサ901は、入力部905や通信部904から種々のデータを受け取り、データの演算結果を表示部906に表示したり、RAM902に格納したりする。
入力部905は、ユーザからデータの入力を受け付けるものであり、例えば、キーボード及びタッチパネルを含んでよい。また、入力部905は、音声入力のためのマイクを含んでよい。
表示部906は、プロセッサ901による演算結果を視覚的に表示するものであり、例えば、LCD(Liquid Crystal Display)により構成されてよい。表示部906は、ロボット30のカメラ908で撮影された画像を表示してよい。
コミュニケーションプログラムは、RAM902やROM903等のコンピュータによって読み取り可能な記憶媒体に記憶されて提供されてもよいし、通信部904により接続される通信ネットワークを介して提供されてもよい。ロボット30では、プロセッサ901がコミュニケーションプログラムを実行することにより、ロボット30を制御するための様々な動作が実現される。なお、これらの物理的な構成は例示であって、必ずしも独立した構成でなくてもよい。例えば、コンピュータ900は、プロセッサ901とRAM902やROM903が一体化したLSI(Large-Scale Integration)を備えていてもよい。
駆動部907は、遠隔操作可能なアクチュエータを含み、車輪等の移動部やマニピュレータ等を含む。ロボット30が移動型のロボットである場合、駆動部907は、少なくとも車輪等の移動部を含むが、マニピュレータを含んでもよい。ロボット30が装着型である場合、駆動部907は、少なくともマニピュレータを含む。
カメラ908は、静止画又は動画を撮像する撮像素子を含み、撮像した静止画又は動画を、通信部904を介して外部装置に送信する。
<変形例>
本実施形態におけるシステム1(または、サーバ装置10、端末装置20、又はロボット30)を実装するためのプログラムは、CD-ROM等の光学ディスク、磁気ディスク、半導体メモリなどの各種の記録媒体に記録しておくことができる。また、記録媒体を通じて、又は通信ネットワークなどを介して上記のプログラムをダウンロードすることにより、コンピュータにインストール又はロードすることができる。
本発明は、上記した実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲内において、他の様々な形で実施することができる。上記実施形態はあらゆる点で単なる例示にすぎず、限定的に解釈されるものではない。
1 システム
10 サーバ装置
20 端末装置
30 ロボット
10 サーバ装置
20 端末装置
30 ロボット
Claims (14)
- プロセッサと記憶部とを備える情報処理装置であって、前記プロセッサは、前記記憶部に記憶されたプログラムを実行することにより、
選択条件に関する情報を取得することと、
第1ロボットを端末装置による操作対象に設定することと、
前記操作対象を、前記第1ロボットから、前記選択条件に応じて選択された複数のロボットのうち、前記第1ロボットとは異なる第2ロボットに切り替え可能にすることと
を含む制御方法を実施するように構成されている、情報処理装置。 - 前記操作対象を切り替え可能にすることは、ユーザ入力、前記第1ロボットの移動、又は経過時間に関する所定の条件を満たしたときに実施される、請求項1に記載の情報処理装置。
- 前記選択された複数の前記ロボットは、前記選択条件に応じて特定される前記ロボットに関連付けられる前記ロボットを含む、請求項1又は2に記載の情報処理装置。
- 前記選択された複数の前記ロボットは、前記ロボットが撮像した画像に対する画像認識処理により特定された情報に基づいて選択された前記ロボットを含む、請求項1から3のいずれか一項に記載の情報処理装置。
- 前記選択された複数の前記ロボットは、前記選択条件に応じて特定される同じグループに分類される前記ロボットを含む、請求項1から4のいずれか一項に記載の情報処理装置。
- 前記ロボットの前記グループへの分類は、前記ロボットに対して予め設定されたメタ情報に応じて決定されることを含む、請求項5に記載の情報処理装置。
- 前記ロボットの前記グループへの分類は、ユーザが前記ロボットを通じて体験可能な内容に応じて決定されることを含む、請求項5又は6に記載の情報処理装置。
- 前記ロボットの前記グループへの分類は、前記ロボットが撮像した画像に対する画像認識処理により特定された情報に基づいて決定されることを含む、請求項5から7のいずれか一項に記載の情報処理装置。
- 複数の前記ロボットは、現実世界に存在するロボットと、仮想世界に存在するロボットとを含む、請求項1から8のいずれか一項に記載の情報処理装置。
- 前記選択条件に関する情報は、ユーザが前記ロボットを通じて体験可能な内容に関する情報を含む、請求項1から9のいずれか一項に記載の情報処理装置。
- 複数の前記ロボットは、互いに所定距離以上離れた場所に存在する、請求項1から10のいずれか一項に記載の情報処理装置。
- 前記制御方法は、前記操作対象を、前記第1ロボットから前記第2ロボットへの切り替えの指示を受け付けるための画像を前記端末装置の表示部に表示するように制御することを含む、請求項1から11のいずれか一項に記載の情報処理装置。
- コンピュータにより実施される情報処理方法であって、
選択条件に関する情報を取得することと、
前記選択条件に応じて選択された固定されていない複数のロボットのうち、第1ロボットを端末装置による操作対象に設定することと、
前記操作対象を、前記第1ロボットから、前記選択された複数のロボットのうち、前記第1ロボットとは異なる第2ロボットに切り替え可能にすることと
を含む情報処理方法。 - コンピュータに、
選択条件に関する情報を取得することと、
前記選択条件に応じて選択された固定されていない複数のロボットのうち、第1ロボットを端末装置による操作対象に設定することと、
前記操作対象を、前記第1ロボットから、前記選択された複数のロボットのうち、前記第1ロボットとは異なる第2ロボットに切り替え可能にすることと
を含む情報処理方法を実行させるためのプログラムが記憶された記憶媒体。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US18/033,059 US20230390937A1 (en) | 2020-10-21 | 2021-10-13 | Information processing device, information processing method, and storage medium |
| EP21882680.8A EP4234181A4 (en) | 2020-10-21 | 2021-10-13 | INFORMATION PROCESSING DEVICE, INFORMATION PROCESSING METHOD, AND STORAGE MEDIUM |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020176568A JP7562367B2 (ja) | 2020-10-21 | 2020-10-21 | 情報処理装置、情報処理方法、及び記憶媒体 |
| JP2020-176568 | 2020-10-21 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022085539A1 true WO2022085539A1 (ja) | 2022-04-28 |
Family
ID=81290801
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/037926 Ceased WO2022085539A1 (ja) | 2020-10-21 | 2021-10-13 | 情報処理装置、情報処理方法、及び記憶媒体 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20230390937A1 (ja) |
| EP (1) | EP4234181A4 (ja) |
| JP (1) | JP7562367B2 (ja) |
| WO (1) | WO2022085539A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115225682B (zh) * | 2021-04-15 | 2024-01-19 | 本田技研工业株式会社 | 管理服务器、远程操作系统、远程操作方法以及存储介质 |
| JPWO2023234378A1 (ja) * | 2022-06-01 | 2023-12-07 | ||
| JP2024135598A (ja) * | 2023-03-23 | 2024-10-04 | 株式会社リコー | 通信制御サーバ、通信システム、通信制御方法、及びプログラム |
| US20240351597A1 (en) * | 2023-04-19 | 2024-10-24 | Hyundai Motor Company | Symmetric human-machine interface for hybrid vehicle control |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017029982A1 (ja) * | 2015-08-14 | 2017-02-23 | ソニー株式会社 | 移動体、情報処理装置、移動体システム、情報処理方法および情報処理プログラム |
| JP6453825B2 (ja) * | 2016-09-27 | 2019-01-16 | ファナック株式会社 | 操作盤と無線通信を行う制御装置、無線モジュール、及び無線中継器 |
| JP2019005819A (ja) * | 2017-06-21 | 2019-01-17 | 富士ゼロックス株式会社 | 遠隔操作型移動ロボットおよびロボット制御システム |
| JP2019062308A (ja) | 2017-09-25 | 2019-04-18 | 富士ゼロックス株式会社 | カメラ付き移動体、カメラ付き移動体制御システム、及びプログラム |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9440356B2 (en) * | 2012-12-21 | 2016-09-13 | Crosswing Inc. | Customizable robotic system |
| WO2012140655A2 (en) * | 2011-04-12 | 2012-10-18 | Baryakar Dan | Robotic system controlled by multi participants, considering administrator's criteria |
| US9821455B1 (en) * | 2015-08-08 | 2017-11-21 | X Development Llc | Replacing a first robot with a second robot during performance of a task by the first robot |
-
2020
- 2020-10-21 JP JP2020176568A patent/JP7562367B2/ja active Active
-
2021
- 2021-10-13 WO PCT/JP2021/037926 patent/WO2022085539A1/ja not_active Ceased
- 2021-10-13 EP EP21882680.8A patent/EP4234181A4/en active Pending
- 2021-10-13 US US18/033,059 patent/US20230390937A1/en active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017029982A1 (ja) * | 2015-08-14 | 2017-02-23 | ソニー株式会社 | 移動体、情報処理装置、移動体システム、情報処理方法および情報処理プログラム |
| JP6453825B2 (ja) * | 2016-09-27 | 2019-01-16 | ファナック株式会社 | 操作盤と無線通信を行う制御装置、無線モジュール、及び無線中継器 |
| JP2019005819A (ja) * | 2017-06-21 | 2019-01-17 | 富士ゼロックス株式会社 | 遠隔操作型移動ロボットおよびロボット制御システム |
| JP2019062308A (ja) | 2017-09-25 | 2019-04-18 | 富士ゼロックス株式会社 | カメラ付き移動体、カメラ付き移動体制御システム、及びプログラム |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4234181A4 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022067781A (ja) | 2022-05-09 |
| EP4234181A1 (en) | 2023-08-30 |
| EP4234181A4 (en) | 2024-10-09 |
| JP7562367B2 (ja) | 2024-10-07 |
| US20230390937A1 (en) | 2023-12-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2022085539A1 (ja) | 情報処理装置、情報処理方法、及び記憶媒体 | |
| JP6984004B2 (ja) | 自律パーソナルコンパニオンによってユーザの人工知能モデルが実行するためのユーザのコンテクスト環境を記述する識別タグに基づくシナリオの継続的選択 | |
| JP6972325B2 (ja) | ユーザ用の人工知能(ai)モデルに基づく可動式の自律型パーソナルコンパニオン | |
| US20150356648A1 (en) | Online Shopping by Multi Participants Via a Robot | |
| JP6566698B2 (ja) | 表示制御装置および表示制御方法 | |
| KR102811794B1 (ko) | 인공 지능 시스템의 동작을 관리하는 인공 지능 장치 및 그 방법 | |
| JP2017534091A (ja) | ロボット装置の行為の仮想表現を表示する拡張現実のための方法及びシステム | |
| JP2019079510A (ja) | 生放送中の音声フィードバックのための方法とシステム、および非一時的コンピュータ読取可能な記録媒体 | |
| WO2015194285A1 (ja) | 情報処理装置、情報処理方法及び端末装置 | |
| KR102741214B1 (ko) | 인공 지능을 이용하여, 복수의 로봇들을 제어하는 관제 시스템 | |
| JP2022188095A (ja) | 情報処理装置、情報処理装置の制御方法、及びプログラム | |
| WO2017029918A1 (ja) | 動画を特定の視野で表示するシステム、方法、及びプログラム | |
| KR102231922B1 (ko) | 인공 지능을 이용하여, 복수의 로봇들을 제어하는 인공 지능 서버 | |
| CN101204062B (zh) | 用于通过网络显示互动电影的系统 | |
| JP2010039256A (ja) | 表示システム、表示方法,及び移動体 | |
| JP7749843B2 (ja) | 仮想シーンにおけるメッセージ処理方法、装置、電子機器及びコンピュータプログラム | |
| JP6149967B1 (ja) | 動画配信サーバ、動画出力装置、動画配信システム、及び動画配信方法 | |
| JP2021013159A (ja) | 情報処理装置、テレプレゼンスロボット、拠点制御システム、遠隔制御システム、情報処理方法およびプログラム | |
| WO2022091787A1 (ja) | コミュニケーションシステム、ロボット、及び記憶媒体 | |
| WO2017171936A1 (en) | Method for use of virtual reality in a contact center environment | |
| JPWO2019031397A1 (ja) | 画像表示装置、画像表示方法及び画像表示プログラム | |
| KR102259429B1 (ko) | 로봇의 배치 구역을 결정하는 인공 지능 서버 및 그 방법 | |
| WO2014132988A1 (ja) | 情報処理装置及び情報処理方法 | |
| KR102795582B1 (ko) | 메타버스 기반 여행 가이드 서비스 제공 장치 및 시스템 | |
| JP7780915B2 (ja) | サーバ装置、配信システム及びその制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21882680 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2021882680 Country of ref document: EP Effective date: 20230522 |