WO2022124400A1 - ロボット及び通信方法 - Google Patents
ロボット及び通信方法 Download PDFInfo
- Publication number
- WO2022124400A1 WO2022124400A1 PCT/JP2021/045541 JP2021045541W WO2022124400A1 WO 2022124400 A1 WO2022124400 A1 WO 2022124400A1 JP 2021045541 W JP2021045541 W JP 2021045541W WO 2022124400 A1 WO2022124400 A1 WO 2022124400A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- function
- robot
- functions
- quantum gate
- superposition
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images


























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1602—Program controls characterised by the control system, structure, architecture
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N10/00—Quantum computing, i.e. information processing based on quantum-mechanical phenomena
- G06N10/20—Models of quantum computing, e.g. quantum circuits or universal quantum computers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/06—Control stands, e.g. consoles, switchboards
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/004—Artificial life, i.e. computing arrangements simulating life
- G06N3/006—Artificial life, i.e. computing arrangements simulating life based on simulated virtual individual or collective life forms, e.g. social simulations or particle swarm optimisation [PSO]
Definitions
- the present invention relates to a robot and its communication method.
- Robot consciousness is considered to be created by the function of a new neural network composed of emotion emergence, plasticity, memory, generation, and branching (judgment), for example.
- the function of this new neural network is considered to be newly constructed from the close relationship between neural receptors related to emotions and memory revealed in neuromedical research and the discovery of a transmission system not limited to ion exchange.
- those having an identity that distinguishes oneself from the other are particularly called "artificial ego".
- As described in Non-Patent Documents 1 and 2 research on artificial ego is in progress.
- the human brain uses both analog and digital information processing, but deep learning, which is being actively researched and developed today, simplifies the complicated information processing of the human brain. Just by replacing it with the theory of probability, it does not resemble the natural function of the human brain. With existing technology, it is difficult to make the robot have a will and consciousness, and it is difficult to realize the thinking of the robot. Therefore, it is an object of the present invention to propose a technique for giving a will and consciousness to the thinking of a robot. Another object of the present invention is to propose a technique for realizing thinking that can make the will and consciousness of a robot inherent.
- the robot according to the present invention simultaneously inputs an input device for inputting biological information carrying human emotional information and a continuous change amount and a discrete separation amount of the biological information, and continuously changes.
- the first quantum gate that outputs multiple functions derived through the division of quantities and discrete separations, and the first that inputs multiple functions and outputs the functions in a superposed state through the superposition of multiple functions. It includes two quantum gates and a communication device that transmits functions in a superposed state to other robots. This enables functional communication by thinking robots and humans.
- the robot according to the present invention may further include an artificial ego engine that generates a plurality of functions expressing the thoughts of the robot.
- the second quantum gate may emerge a function that realizes the will and consciousness in the thought by superimposing a plurality of functions that express the thought of the robot. This makes it possible to realize the thinking of the robot.
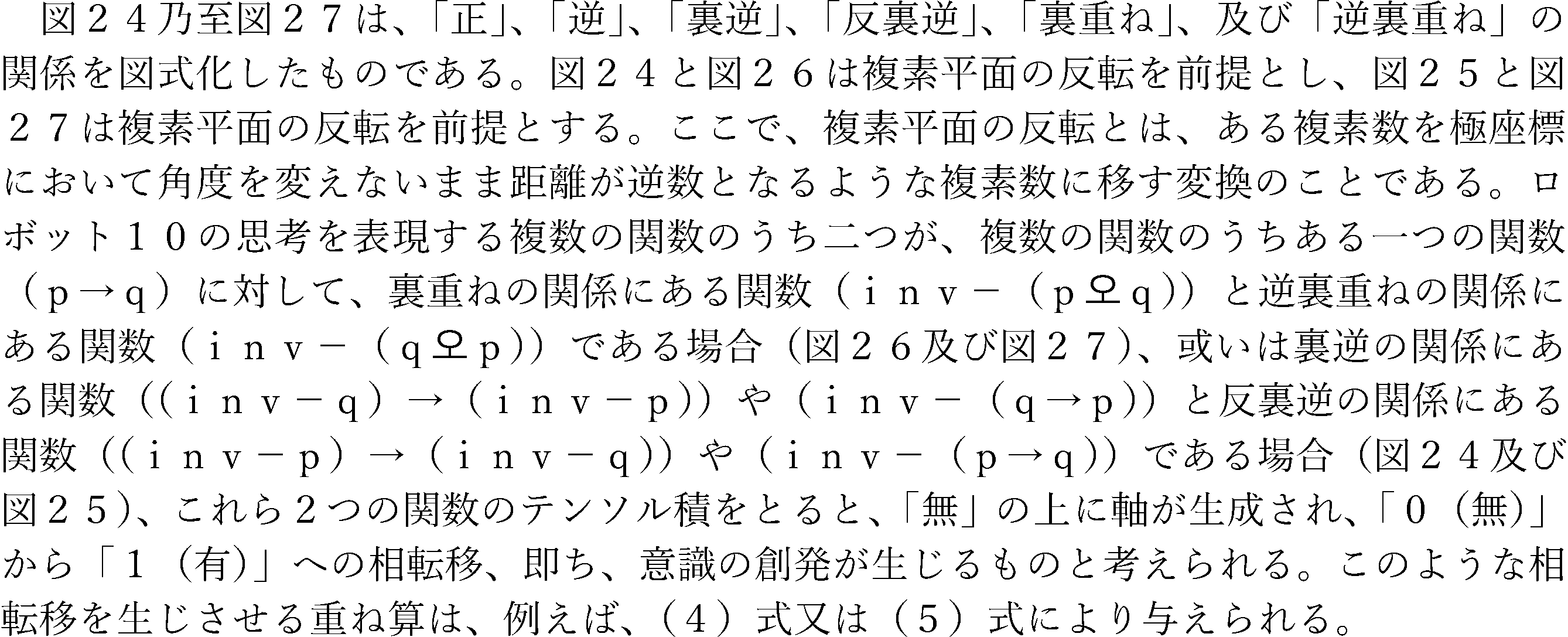
- Two of the plurality of functions expressing the thinking of the robot may be a function having a back-to-back relationship and a function having an inverse back-to-back relationship to one of the plurality of functions. This makes it possible to emerge a function that realizes will and consciousness in thought.
- Two of the plurality of functions expressing the thinking of the robot may be a function having an inverse relationship with a function having an inverse relationship with one function among the plurality of functions. This makes it possible to emerge a function that realizes will and consciousness in thought.
- the function that controls the superposition by the second quantum gate may be a function that represents the change in the superposition state of the qubits by observation using wave motion and anti-wave motion. This makes it possible to emerge a function that realizes will and consciousness in thought.
- the communication method is a communication method executed by a robot, in which a step of inputting biometric information carrying human emotional information through an input device, a continuous change amount of the biometric information, and a discrete separation amount. Is input to the first quantum gate at the same time, and a plurality of functions derived from the division of the continuous change amount and the discrete separation amount by the first quantum gate are output from the first quantum gate, and a plurality of steps.
- a step of inputting a function to the second quantum gate and outputting a function in a superposed state from the second quantum gate through superposition of a plurality of functions by the second quantum gate, and a function in a superposed state. Includes steps to send to other robots through a communication device. This enables functional communication by a robot that thinks with will and consciousness.
- the robot can have a will and consciousness. Further, according to the present invention, it is possible to realize the thinking of a robot having a will and consciousness and the transmission of the thinking.
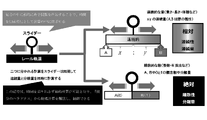
- quantum computers have been attracting attention, but the "quantum gate”, which is equivalent to the logic gate of a normal computer, does not deviate from the principle of the existing Von Neumann computer and does not have a gate setting that makes the best use of quantum characteristics. .. Therefore, the applicant has applied "MU", “KU”, “MGN (+)”, “MGN (-)”, etc. as non-Von Neumann type quantum gates that can fully demonstrate the quantum characteristics of uncertainty and can be controlled. Was devised (see Fig. 1).
- FIG. 2 shows a model symbolizing the engineering function of how to handle discrete numbers (concepts, thoughts, etc.) to be calculated at the same time as the amount of continuous change drawn by gradation. That is, an engineering model for simultaneously measuring and calculating a continuous change amount and a discrete separation amount (discrete number) is shown.
- the symbols A and B are attribute symbols and represent discrete separation quantities such as the number and the number of concepts.
- the symbols x and y represent the amount of physical continuous change such as weight, length, and volume.
- the point to be noted is the synchronization characteristics of the slider shown in FIG.
- the amount of continuous change that represents a relative state and the amount of discrete separation that represents an absolute state strict rule
- it is a continuous object to be measured and calculated.
- the amount of change and the amount of discrete separation need to be synchronized. Therefore, Applicants designed in 2006 a slider and a symbol that symbolizes the continuous movement and the discrete separation that move synchronously (see FIG. 3).
- the homeostasis homeostasis derived from the signal processing of waves existing in the natural world or the living body.
- this calculation principle is generally continuous (analog) and discrete (digital) simultaneous calculation, it should be regarded as the principle of non-Von Neumann computer as opposed to the principle of Von Neumann computer that calculates discretely by binary method. Can be done. Also, if you have mastered Feynman's matrix vector and Fourier series transformation, you can easily understand that energy can be expressed by a vector, considering the rail part of the operator as a matrix and the position indicated by the handle part as a vector in actual calculation. In addition, it is quick to understand the tensor field that handles vectors that are not affected by coordinate transformation.
- scalar> vector> tensor for example, it can be understood that the tensor is converted into a vector and captured as in the Fourier series transformation, and the Kokichi transformation for calculating the energy field is performed.
- the calculation principle shown in "Space-time calculation concept in the anti-Einstein world (DHU JOURNAL, vol.06, 2019, pp.3-14)" by developing this operator expresses the vector of the slider and its movement.
- the function set of the handle is considered separately, and the phase transition that breaks through zero (quantum gate MU) is explained from the three-dimensional relationship between the two operators.
- the applicant considered the anti-Riemann sphere (anti Riemann) using both the inverted Riemann sphere and the back Riemann sphere.
- anti Riemann anti Riemann
- the anti-Einstein field was derived using this definition.
- (0 ⁇ ) 1 holds by defining the origin as anti-0 [0 ⁇ 1] and using the function of the Mitsuyoshi operator as a means to simply connect the quantum theory and the theory of relativity (0 ⁇ ).
- the applicant has derived DHU JOURNAL, vol.06, 2019, pp.3-14).
- the problem of division by zero at Einstein where the position of the center of gravity that should have been at the origin was raised to ⁇ (North Pole), was solved by returning the center of gravity to the origin. It became easy to understand.
- ANT corresponds to “anti”, “reverse”, and “back”, respectively.
- MU "KU”, “MGN (+)”, and “MGN (-)” are "0 points of the Riemann sphere”, “0 points existing in the center of KU and ANT-KU”, “North Pole of the Riemann sphere”, and " Corresponding to the "anti-North Pole of the anti-Riemann sphere", ANT-KU corresponds to the 0 point (anti-South Pole) of the anti-Riemann sphere where the KU is moved by ANT.
- the applicant proposed a model that can consider attribute inversion with a geometric structure like a Klein bottle in order to approach TOE.
- the front surface and the back surface are connected near the base of the handle (self-intersection), and a structure is defined so that the entire surface cannot be oriented.
- anti-matter in quantum mechanics refers to the existence of particles that have the same mass and spin as a certain substance and have the opposite attributes, but the fact that matter and anti-matter can be observed at the same time is oriented like a Klein plane. It shows that there is a four-dimensional surface (geometric structure) that cannot be attached, and that attribute inversion can occur in the path on the surface.
- the attribute in TOE is that the relationship between two things brought about by the existence such as matter and antimatter appears in an observable state in a geometric structure having a loop structure. Therefore, while paying attention to the vicinity of the base of the handle, the applicant first examined the relationship (function), attribute, and the reverse of the attribute for the path, front, and back on the Klein surface.
- the attributes are expressed by logical expressions. This is because the relationship between two things is the essence of the attribute, and the relationship between the two things can be expressed by a logical formula. For example, when the attribute of a certain substance is (p ⁇ q), the antimatter is defined as the opposite (q ⁇ p). Next, "anti” is relatively defined. In order to avoid confusion between expressions such as antimatter in the relationship of "matter and antimatter” and antimatter in the relationship of "system and antimatter", the quantity and movement are exactly the same, but the components have completely opposite characteristics. Define "antimatter” as a modifier.
- the concept of "reverse” (opposite position or state without passing through the origin) and minus (negative) in coordinates is “anti”.
- antimatter indicates that the antimatter (reverse) due to polarity reversal mainly consisting of the substance (positive) becomes the antimatter, and the antimatter including the even number becomes the antimatter. Therefore, for example, an antimatter has an antimatter relationship with a substance, and a substance has an antimatter relationship with an antimatter. If the conditions of what is the main thing change in this way, the appearance and attributes will change in the opposite direction. This is called “anti-in a big sense" as attribute inversion.
- the kinematic pair is separated into two in order to connect the positive and the negative. This is the work of putting scissors in a mere untwisted obi (ring) and opening it when creating a Mobius strip. Only when the front and back of the obi are separated can the front and back be connected.
- the propositional logic system extended by the Mitsuyoshi operator can be naturally matched with the extension to the back and reverse of the Riemann sphere. For example, if you select a vector such that the start point is ⁇ and the end point is 0 in the Lehman sphere, and the vector such that the start point is anti- ⁇ and the end point is 0 in the inverse Lehman sphere, the sum of the pairs is 0 in length ( When it becomes a vector with a distance of 0), the 0 matches all of the 0 (KU) of the Lehman sphere, the 0 (ANTI-KU) of the inverted Lehman sphere, and the 0 (MU) between KU and ANTI-KU. Model can be built.
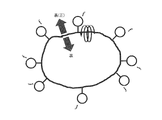
- the fact that the Riemann sphere and the inverted Riemann sphere have an attribute inversion relationship means that 0 and ⁇ of the Riemann sphere correspond to ⁇ and 0 of the inverted Riemann sphere, respectively, and the two spheres are a pair of generation and disappearance. It can also be shown that Further, as shown in FIG. 30, emergence can be defined as an extreme state in which wave and antimatter fluctuations and substance and antimatter fluctuations antagonize each other.
- a symmetrically energetically stable vacuum generated by the pair formation of "infinity + anti-infinity" and "empty set: anti-aircraft set” is symmetrically low in energy. It is defined as a phenomenon of moving while reversing the attributes. Due to the pair formation at the time of creation, the center of gravity is biased and asymmetrical occurs in the Einstein field where only the Riemann sphere is assumed, but in the anti-Einstein field where anti-Riemann spheres such as the reverse Riemann sphere and the back Riemann sphere are also assumed, the center of gravity is the center. Can be kept in a symmetric state.
- Arithmetic is an arithmetic that uses the Mitsuyoshi operator to cut numbers and quantities (including functions and waveforms). Division is different from division. For example, consider dividing an object into two. If the mass of an object is used as a reference 1 and it is bisected, there are two fragments with a mass of 0.5. When the conventional division operator ⁇ is replaced with the symbol cut and the state of dividing one object into two fragments is expressed by a mathematical formula, the equation (1) is obtained.
- a (x) indicates a left fragment of the object
- B (y) indicates a right fragment of the object.
- the "concept,”"number,” and “quantity” of objects that form a pair on the left and right can be described by a single mathematical formula.
- the sum (A (x) + B (y)) of the right side of the equation (1) is constant, it is another aspect of the "concepts" A and B, for example, length and the like. Focusing on the pair (x, y) of the amount of continuous change of, x and y change continuously while maintaining the sum by moving the slider of the Mitsuyoshi operator.
- FIG. 12 is an explanatory diagram showing the configuration of the robot 10 according to the embodiment of the present invention.
- the autonomy of the robot 10 that is, the creation of will and consciousness (awakening, attention, awareness)
- the purpose of intention and consciousness is that the robot 10 can have an autonomous free conversation, and it is the autonomy itself that realizes the free will in communication with the human 70.
- the robot 10 that is the alter ego or incarnation of the human 70 is particularly called an avatar.
- the robot 10 replaces the consciousness or emotion of the human 70 with a function and understands this.
- the will of the human 70 is the direction (direction) toward the purpose resulting from the adjustment of the drive by morality, this can be expressed by a vector-valued function.
- the will can be expressed as a curve, that is, a function, how it goes toward the purpose.
- the applicant is a will world in which the positive world is composed of matter and wave motion, and the anti-world is composed of anti-material and anti-wave motion. Assuming that it is an anti-will world, it is presumed that it will be possible to create a pair of positive and negative wills under such an assumption.
- the consciousness of the human 70 is a space formed by a plurality of perceptions generated by the will, it can be expressed as a space in which a plurality of vector value functions are stretched.
- the robot 10 includes a conversation system 20, a function conversion module 30, a function compression / decompression module 40, an artificial ego engine 50, and a communication device 60.
- the conversation system 20 is a system for voice conversation with a human 70, and includes an input device 21 for inputting voice information from the human 70 and an output device 22 for outputting voice information to the human 70.
- the input device 21 has, for example, a function corresponding to the hearing of the robot 10.
- the output device 22 has, for example, a function corresponding to the vocal organ of the robot 10.
- the voice information from the human 70 is an example of biological information that carries the emotional information of the human 70.
- the function conversion module 30 includes a quantum gate 31.
- the function conversion module 30 uses the quantum gate 31 to convert voice information from the human 70 into a plurality of functions.
- the quantum gate 31 is a Mitsuyoshi operator that performs division.
- the function compression / decompression module 40 includes a quantum gate 41.
- the function compression / decompression module 40 uses the quantum gate 41 to generate a function in a superposed state through the superposition of a plurality of functions.
- the quantum gate 41 is a Mitsuyoshi operator that performs superposition.
- the plurality of functions superimposed by the superposition by the quantum gate 41 may be a plurality of functions converted from the voice information of the human 70 by the function conversion module 30, or may be generated by the artificial ego engine 50 described later, of the robot 10. It may be multiple functions that express thoughts.
- the artificial ego engine 50 is an operating system that understands the will, consciousness, or emotion of the human 70 based on a function that describes the will, consciousness, or emotion of the human 70, and has an ego and thinks autonomously.
- the artificial ego engine 50 can receive, for example, a plurality of functions converted from the voice information of the human 70 by the function conversion module 30, and can understand the will, consciousness, or emotion of the human 70 from the received plurality of functions.
- the artificial ego engine 50 can also generate, for example, a plurality of functions expressing the thoughts of the robot 10 (for example, the drive toward a certain goal).
- the artificial ego engine 50 can also receive, for example, a function in a superposed state from another robot 10 and understand the will, consciousness, or emotion of the human 70 or another robot 10 from the function in the superposed state. ..
- the communication device 60 performs data communication with another robot 10 by wireless communication or wired communication.
- the communication device 60 can send and receive functions in a superposed state to and from another robot 10.
- voice information is given as an example of biometric information carrying human emotional information
- biometric information carrying human emotional information is not limited to voice information, and is, for example, facial expressions and gestures.
- behavior information electrocardiographic information, blood pressure information, brain wave information, myoelectric information, and the like.
- reference numeral 80 indicates voice information of a human 70 who talks with the robot 10.
- the quantum gate 31 simultaneously inputs a continuous change amount and a discrete separation amount of the voice information 80, and outputs a plurality of functions derived through the division of the continuous change amount and the discrete separation amount.
- functions f1, f2, f3, f4, f5, f6 shown in FIG. 13 are exemplified, but the functions derived by cutting are used. The number is not limited to six.
- the continuous change amount of the voice information 80 is, for example, the raw data (analog data) of the voice information 80.
- the discrete separation amount of the voice information 80 is, for example, digital data of the voice information 80 that has undergone digital signal processing (for example, Fourier transform).
- the quantum gate 31 is preset with a standard (for example, the amount of hormone secreted for each type of hormone) as an index for evaluating the will, consciousness, or emotion of the human 70.
- the quantum gate 31 cuts the voice information 80 according to a preset standard.
- the functions f1, f2, f3, f4, f5, f6 are derived as functions representing the movement of the slider of the Mitsuyoshi operator. It should be noted that a mechanism is also conceivable in which the artificial ego engine 50 updates the standard as an index of division.
- a behavior-suppressing manner depression tendency
- a behavior-promoting manner manic tendency
- a function that expresses a temporary will, consciousness, or emotion in a certain scene of the human 70 is called a virtual function, and a function that qualitatively expresses the will, consciousness, or emotion of the human 70 is called a meta function. Metafunctions correspond to the superordinate concept of virtual functions.
- the function fn is a virtual function derived from the characteristics of the voice information 80 for n cycles.
- the function f (n + 1) is a virtual function derived from the features of the voice information 80 for (n + 1) cycles, and at the same time, is a meta function including the function fn as a virtual function.
- the function f (n + 1) corresponds to the superordinate concept of the function fn.
- the quantum gate 41 inputs a plurality of functions f1, f2, f3, f4, f5, f6, and outputs a function in a superposed state through the superposition of the plurality of functions f1, f2, f3, f4, f5, f6. ..
- a function of the superposed state through superposition for example, a vector value function can be mentioned.
- a vector-valued function is a function suitable for treating will and consciousness as a vector. The reason is that it is easy to describe the process when all vectors are orthogonal, time and space disappear, and emergence occurs by using a vector-valued function.
- the function of the superposed state through the superposition expresses the will, consciousness or emotion of the human 70 qualitatively and quantitatively, the function expresses the will, consciousness or emotion of the human 70 in every conceivable situation. It is considered that the amount of data is smaller than that of a collection of data representing.
- Such a function can be used for function communication as a means for controlling the behavior of the robot 10. For example, when a robot 10 receives a function (a function in a state of being overlapped through superposition) that qualitatively expresses the will, consciousness, or emotion of a human 70 from another robot 10, the artificial ego engine 50 of the robot 10 receives it. , You can think things in the same way as the human 70.
- one robot 10 qualitatively expresses the will, consciousness, or emotion of the human 70 (a function in a state of being overlapped through superposition), thereby transmitting to each of the other robots 10 each robot 10. Can be controlled to behave in the same way as the human 70.
- FIG. 14 is a schematic representation of the definition of “anti” in the “anti-Einstein field hypothesis” described in the inventor's paper (DHU JOURNAL, vol. 06, 2019, pp. 3-14).
- the observer's viewpoint was in the positive position. Therefore, the positive was treated as the "lord” world, and the reverse and even number (reverse and reverse) were treated as the "anti” world.
- Anti here indicates that the polarity is reversed by attribute inversion. Applicants have subsequently schematized that the definition of "anti” changes dynamically depending on the viewpoint, as shown in FIG.
- information can be stored in the quantum world, and a phase transition can be made by passing through a singular point such as a black hole.
- the black hole string (ring rubber) is interpreted on the front and back, and the characteristic that the information is convoluted and undergoes a phase transition in the quantum gate KU is used.
- the black hole string that exists as a local solution can be used as a recording medium. That is, it is possible to suck the information into the black hole and take out the information sucked into the black hole.
- the antagonism and change of the gravity of the star and the force of fusion that repels the gravity from the inside inside the star made of hydrogen such as the sun can be regarded as an event of the world in the division.
- the star shrinks due to its own gravity, and all the mass is concentrated at the singular point where the density is infinite ⁇ the point where there is no volume. Shrink toward state>.
- it does not become a neutron star and the size of the star is 30 times or more that of the sun, it becomes a black hole.
- the rotating black hole can be controlled and energy can be extracted.
- this functional quantum gate can be controlled by the shading (density) of the superposition. Therefore, without creating a black hole on the ground, this phase transition communication is caused by the distortion of space-time, sunlight, laser, etc. when the time is to accelerate the change using a primitive gyro structure or a simulator on a computer. Can be emulated and reproduced. In addition, the problem of what happens to quantum information in a black hole that shrinks due to Hawking radiation is also preserved by another universe by vector radiation from zero division by inverse Lehman by vectors and functions, and Einstein's Cartan theory and general relativity.
- the holographic principle with high reproducibility is used as a storage means. Therefore, the three-dimensional information of the black hole is handled by the means of the present invention that converts the information stored in two dimensions into the front and back (positive). As a result, the front, back, and nothing (the world of KU and MU inside the empty set inside the black hole) become three-dimensional, and the four-dimensional becomes MU, that is, absolutely non-axis, in the 2019 paper (DHU JOURNAL, It is also described in vol.06, 2019, pp.3-14).
- FIG. 21 shows the frame of the empty set, which is the event horizon of the black hole and the boundary of the KU, represented by a string of string theory.
- the string shown in FIG. 21 has the information stored as a function by the Mitsuyoshi operator, and the information is made three-dimensional by rotating the front and back at the boundary of KU as it is.
- This is the principle of memory means using the highly reproducible holographic principle. Then, it becomes possible to define the field by storing the aspect in which the whole rotates as a metafunction. By treating this rotation as a tensor product, the invoice is calculated in the multiplication in KU of FIG. 23 (a back calculation different from not in the even number formula).
- equation (5) is also an emergent equation in the Lehman world and the anti-Lehman world.
- the artificial ego engine 50 generates a plurality of functions expressing the thoughts of the robot 10 by cutting and superimposing.
- each function can be expressed by a logical expression
- the logical expression of the function quantum gate for (p ⁇ q) is defined as follows.
- the difference between inversion and reverse inversion can be expressed by a band.
- the essential difference between cutting and reverse overlapping is the difference between cutting and overlapping, which can also be intuitively expressed by a band as shown in FIG.
- equation (3) indicates that a phase transition occurs when the multiplication of n ⁇ ⁇ and the multiplication of n ⁇ 0 overlap.
- the phase occurs when the superposition from "1" to "0” and the superposition from "0" to “1” overlap. It indicates that a transition will occur.
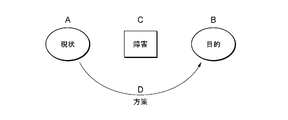
- the quantum gate 41 can emerge a function that realizes the intention by superimposing a plurality of functions that express the thoughts of the robot 10. For example, as shown in FIG. 28, when the obstacle C exists in the process of the robot 10 moving from the current state A to the object B, in the conventional method, a human gives an instruction to avoid the obstacle C to the robot 10. Alternatively, it is necessary to perform machine learning in advance assuming all obstacles. On the other hand, according to the above-mentioned "emergence of consciousness", even if a human does not give an instruction to avoid the obstacle C to the robot 10 or machine learning is performed in advance assuming any obstacle. The robot 10 can devise a measure D for avoiding the obstacle C by itself and head toward the purpose B. The quantum gate 41 realizes the thinking unique to a robot with will and consciousness.
- Waves are a phenomenon in which a spatial distribution pattern of some physical quantity propagates, and there are longitudinal waves and transverse waves.
- An electromagnetic inversion device that inverts an electric field and a magnetic field, and a magnetic field generator that generates a strong magnetic field are manufactured.
- the electric field and magnetic field of the laser beam output from the laser launcher are inverted by the electromagnetic inversion device.
- mass is generated from the laser light that collides in the vacuum glass container by passing the laser light with the electric and magnetic fields inverted through the vacuum glass container from two directions under the strong magnetic field generated by the magnetic field generator.
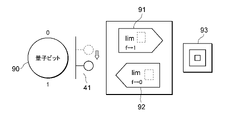
- reference numeral 90 indicates a qubit to be observed.
- f (x) is a function representing the change in the superposition state of the qubit 90 by observation using wave motion and anti-wave motion.
- f (x) can be obtained as a function representing the movement of the slider that fluctuates in the process of dividing the superposition state of the qubit 90.
- Reference numeral 91 indicates a process in which the superposition state of the qubit 90 is determined to be “1” by observation.
- Reference numeral 92 indicates a process in which the superposition state of the qubit 90 is determined to be “0” by observation.
- Reference numeral 93 is a region indicating the existence probability of the qubit 90, and the entire region is referred to as KU.
- f (x) Singed lasso
- a dynamic model of hormone can be reproduced.
- the dynamic model of emotion generation can be controlled by using inverse bays as f (x).
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Computing Systems (AREA)
- Mathematical Physics (AREA)
- Data Mining & Analysis (AREA)
- Evolutionary Computation (AREA)
- Artificial Intelligence (AREA)
- Software Systems (AREA)
- General Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Biophysics (AREA)
- Biomedical Technology (AREA)
- Computational Linguistics (AREA)
- Molecular Biology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Computational Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Mathematical Analysis (AREA)
- Mathematical Optimization (AREA)
- Pure & Applied Mathematics (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
Abstract
ロボット10は、人間70の感情情報を担う生体情報を入力する入力装置21と、生体情報の連続的変化量及び離散的分離量を同時に入力し、連続的変化量及び離散的分離量の切り算を通じて導出される複数の関数を出力する量子ゲート31と、複数の関数を入力し、複数の関数の重ね算を通じて重ねられた状態の関数を出力する量子ゲート41と、重ねられた状態の関数を他のロボット10に送信する通信装置60とを備える。
Description
本出願は、2020年12月10日に出願された日本出願番号2020-204758号に基づくもので、ここにその記載内容を援用する。
本発明はロボット及びその通信方法に関わる。
ロボットの意識は、例えば、情動創発、可塑性、記憶、生成、分岐(判断)により構成される新しいニューラルネットワークの機能によって作られるものと考えられる。この新しいニューラルネットワークの機能は、神経医学研究で明らかにされた感情と記憶に関する神経レセプター同士の密接な関係及びイオン交換だけに限らない伝達システムの発見などから新たに構築されるものと考えられる。このような新しいニューラルネットワークの機能のうち、自己と他者を区別してアイデンティティを持つものを、特に、「人工自我」と呼ぶ。非特許文献1,2に記載されているように、人工自我に関する研究が進められている。
"Moral Decision Making in Autonomous Systems: Enforcement, Moral Emotions, Dignity, Trust, and Deception,"IEEE, Vol.100, March 2012
"Technologist's magazine,"Vol.22
人の脳は、アナログ的な情報処理とデジタル的な情報処理の両方を使用しているが、今日盛んに研究開発が進められている深層学習は、複雑な人間の脳の情報処理を単純な確率論に置き換えているだけで、人間の持つ自然な脳の機能とは似ても似つかないものとなっている。既存の技術では、ロボットに意志や意識を持たせることも、ロボットの思考を実現することも困難である。
そこで、本発明は、ロボットの思考の内に意志や意識を持たせる技術を提案することを課題とする。また、本発明は、ロボットの意志や意識を内在させ得る思考を実現する技術を提案することを課題とする。
そこで、本発明は、ロボットの思考の内に意志や意識を持たせる技術を提案することを課題とする。また、本発明は、ロボットの意志や意識を内在させ得る思考を実現する技術を提案することを課題とする。
上述の課題を解決するため、本発明に関わるロボットは、人間の感情情報を担う生体情報を入力する入力装置と、生体情報の連続的変化量及び離散的分離量を同時に入力し、連続的変化量及び離散的分離量の切り算を通じて導出される複数の関数を出力する第1の量子ゲートと、複数の関数を入力し、複数の関数の重ね算を通じて重ねられた状態の関数を出力する第2の量子ゲートと、重ねられた状態の関数を他のロボットに送信する通信装置とを備える。これにより、思考するロボットやヒトによる関数通信が可能になる。
本発明に関わるロボットは、ロボットの思考を表現する複数の関数を生成する人工自我エンジンを更に備えてもよい。第2の量子ゲートは、ロボットの思考を表現する複数の関数の重ね算を通じて思考の内に意志や意識を実現する関数を創発してもよい。これにより、ロボットの思考を実現することができる。
ロボットの思考を表現する複数の関数のうち二つは、複数の関数のうちある一つの関数に対して、裏重ねの関係にある関数と逆裏重ねの関係にある関数でもよい。これにより、思考の内に意志や意識を実現する関数を創発することができる。
ロボットの思考を表現する複数の関数のうち二つは、複数の関数のうちある一つの関数に対して、裏逆の関係にある関数と反裏逆の関係にある関数でもよい。これにより、思考の内に意志や意識を実現する関数を創発することができる。
第2の量子ゲートによる重ね算を制御する関数は、波動と反波動とを用いた観測による量子ビットの重ね合わせ状態の変化を表す関数でもよい。これにより、思考の内に意志や意識を実現する関数を創発することができる。
本発明に関わる通信方法は、ロボットにより実行される通信方法であって、人間の感情情報を担う生体情報を、入力装置を通じて、入力するステップと、生体情報の連続的変化量及び離散的分離量を同時に第1の量子ゲートに入力し、連続的変化量及び離散的分離量の第1の量子ゲートによる切り算を通じて導出される複数の関数を第1の量子ゲートから出力するステップと、複数の関数を第2の量子ゲートに入力し、複数の関数の第2の量子ゲートによる重ね算を通じて重ねられた状態の関数を第2の量子ゲートから出力するステップと、重ねられた状態の関数を、通信装置を通じて、他のロボットに送信するステップと、を含む。これにより、意志や意識を持って思考するロボットによる関数通信が可能になる。
本発明によれば、ロボットに意志や意識を持たせることができる。また、本発明によれば、意志や意識を持ったロボットの思考とその思考の伝達を実現することができる。
以下、図面を参照しながら、本発明の実施形態について説明する。ここで、同一符号は、同一の構成要素を示すものとし、重複する説明は省略する。
近年、量子コンピュータが注目されているが、通常のコンピュータの論理ゲートに相当する「量子ゲート」は、既存のノイマン型計算機の原理から逸脱することなく、量子特性を生かしたゲート設定になっていない。そこで、本出願人は、不確実性の量子特性を存分に発揮し、かつ制御可能な非ノイマン型の量子ゲートとして「MU」「KU」「MGN(+)」「MGN(-)」などを考案した(図1参照)。
この量子ゲートを実現させるため、本出願人は、2006年に発表した「光吉演算子」の計算機能を更に拡張し、入力となる連続変化量と離散的分離量を同時に空間的に計算できるように工夫した。これにより、時間軸に変換された「波動的関数」を出力することができるようになった。この新規に拡張された「光吉演算子」の機能によってN次元の複素ユークリッド空間にリーマン幾何を導入した基礎を築くことができ、これにより空間枠が拡張され、また、複素数体上の内積空間であるところのN次元のユニタリ空間における量子力学的な発想により「非ノイマン型の量子ゲート」を実現することができる。この量子ゲートは、量子コンピュータの計算制御、三次元ユークリッド空間における多くの分野で活用することが可能である。
<量子ゲートに使う論理記号(光吉演算子)に対して新規に拡張された機能>
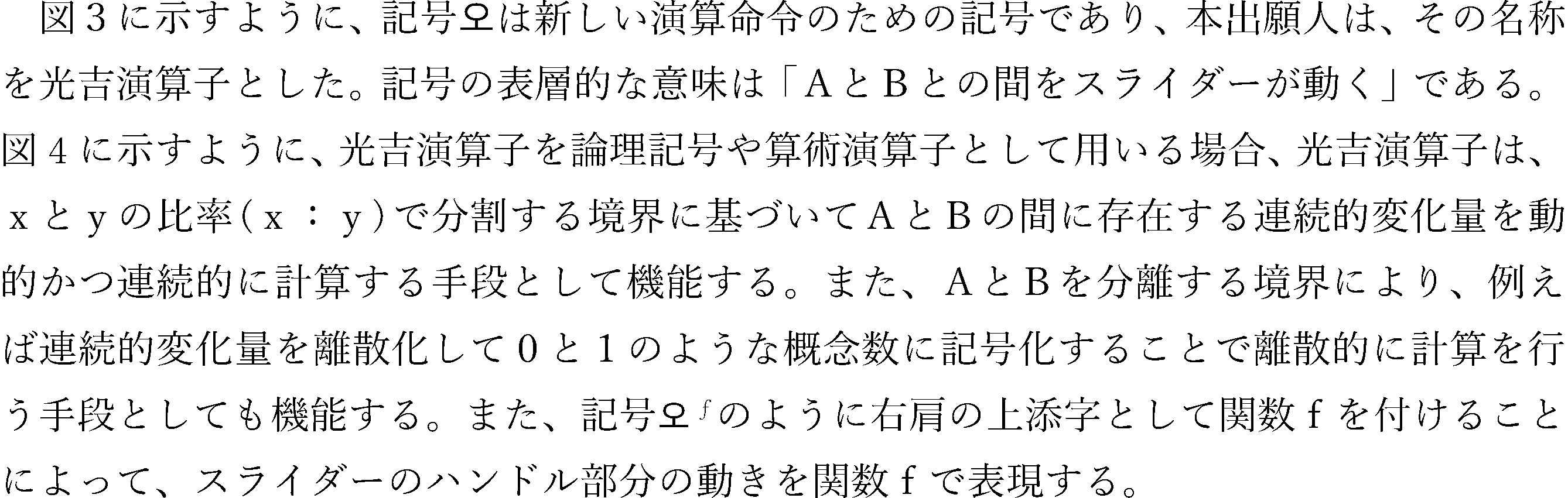
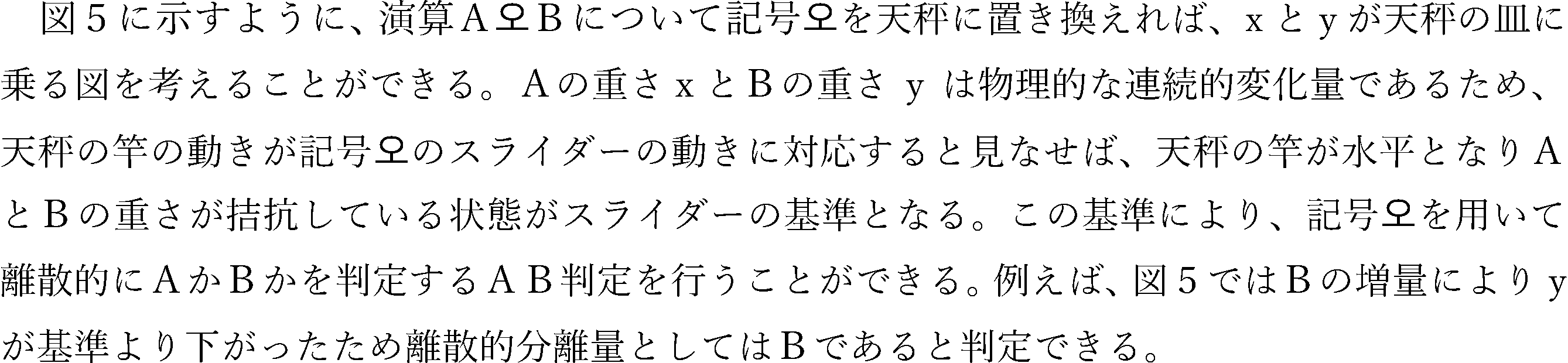
図2は、グラデーションで描かれた連続的変化量と同時に計算するべき離散的な数(概念・思考など)をどう扱うかの工学的機能を記号にしたモデルを示している。すなわち、連続的変化量と離散的分離量(離散的な数)を同時に計測し計算するための工学的モデルを示している。図2において、記号AとBは属性記号であり、個数や概念数など離散的分離量を表している。また、図2において、記号xとyは、重さ、長さ、体積などの物理的な連続的変化量を表している。
図2は、グラデーションで描かれた連続的変化量と同時に計算するべき離散的な数(概念・思考など)をどう扱うかの工学的機能を記号にしたモデルを示している。すなわち、連続的変化量と離散的分離量(離散的な数)を同時に計測し計算するための工学的モデルを示している。図2において、記号AとBは属性記号であり、個数や概念数など離散的分離量を表している。また、図2において、記号xとyは、重さ、長さ、体積などの物理的な連続的変化量を表している。
ここで、注意すべきポイントは、図2に示したスライダーの同期特性である。相対的な状態を表す連続的変化量の計測や計算と、絶対的な状態(厳格なルール)を表す離散的分離量の計測や計算を同時に行うために、計測や計算の対象となる連続的変化量と離散的分離量は同期する必要がある。したがって、本出願人は、同期して動く連続的変化量と離散的分離量をスライダーとその動きに象徴させる記号を2006年にデザインした(図3参照)。
例えば、機能特性の関数をf(x)、変動する関数をhとおけば、自然界や生体に存在する波の信号処理から導出したホメオスタシス(恒常性)はh=f(x)で表せる。
これまで一般に知られている計算原理では、概念数と連続物理量を同時計算する具体的手法は確立されていない。したがって、独自の工学的手法として、スライダーにより同期した連続的変化量と離散的分離量を同時に計算する構造を定義する(図5参照)。
この計算原理は、一般には連続(アナログ)と離散(デジタル)の同時計算になるので、二進法で離散的に計算するノイマン型計算機の原理に対して、非ノイマン型計算機の原理であると見ることができる。また、ファインマンのマトリックスベクターやフーリエ級数変換を習得していれば、実際の計算において演算子のレール部分をマトリックス、ハンドル部分が示す位置をベクトルと考え、ベクトルでエネルギーが表現できることが容易に分かる。また、座標変換の影響を受けないベクトルを扱うテンソル場の理解も早い。スカラー>ベクトル>テンソルにおいて、例えば、フーリエ級数変換のようにテンソルをベクトルに変換して捉え、エネルギー場を計算する光吉変換を行うことが理解できる。また、この演算子を発展させて「反アインシュタイン界(DHU JOURNAL,vol.06,2019,pp.3―14)での時空計算概念」に示した計算原理では、スライダーのベクトルとその動きを表すハンドルの関数集合を分けて考え、二つの演算子の立体的関係からゼロ(量子ゲートMU)を突破する位相転移を説明している。
<光吉演算子の拡張機能を用いたTOE公理の説明>
アインシュタインの相対性理論の解釈においては、2次元の複素平面上の点を3次元の球体上に立体投影するリーマン球面を技術的に使用することができる。ここでは、複素平面上の点とリーマン球面上の点の写像を考えるときに用いる3次元の球体をリーマン球体と呼んでいる。リーマン球体を用いることにより、特に、1/0=∞がスムーズに解釈できるようになる。つまり、リーマン球面上の無限遠点(北極点)に対する複素平面上の無限遠点からの写像を表す線が無限に伸びると、その線とリーマン球面との交点は北極点になる。しかし、これでは本来なら原点にある筈の重心の位置が無限に持ち上げられていることになるため、「無限の行為を無限である」と説明しているだけではないかと考えられる。さらに、リーマン球体の直径が1であるとすれば、この1という長さは0から∞までの距離であると解釈できるが、ゼロ除算時にリーマン球体の直径がどのような意味を持つのか深く考察できないという問題もある。例えば、リーマン球体において始点が∞で終点が0であるようなベクトルの対として始点が0で終点が∞のベクトルを選び、これらの和が長さ0(距離0)のベクトルになるような二項演算を定義したとしても、この定義で説明できるようになる自然現象がないために考察をここから進めることは困難である。そして∞への収束により重心が北極点に移る不自然さは解決されないままである。このようにリーマン球体においてもゼロ除算の問題は解決されず、数学ではゼロ除算の先に体系の広がりはないとされてきた。また、物理学では解釈できないためにゼロ除算の解は存在しないとされたり単に無限大を表すものと解釈されたりするなど深く考察されてこなかった。これでは、ゼロ距離で重力が無限大となり、熱力学第二法則「エネルギー保存」での矛盾と崩壊が指摘されることになる。
アインシュタインの相対性理論の解釈においては、2次元の複素平面上の点を3次元の球体上に立体投影するリーマン球面を技術的に使用することができる。ここでは、複素平面上の点とリーマン球面上の点の写像を考えるときに用いる3次元の球体をリーマン球体と呼んでいる。リーマン球体を用いることにより、特に、1/0=∞がスムーズに解釈できるようになる。つまり、リーマン球面上の無限遠点(北極点)に対する複素平面上の無限遠点からの写像を表す線が無限に伸びると、その線とリーマン球面との交点は北極点になる。しかし、これでは本来なら原点にある筈の重心の位置が無限に持ち上げられていることになるため、「無限の行為を無限である」と説明しているだけではないかと考えられる。さらに、リーマン球体の直径が1であるとすれば、この1という長さは0から∞までの距離であると解釈できるが、ゼロ除算時にリーマン球体の直径がどのような意味を持つのか深く考察できないという問題もある。例えば、リーマン球体において始点が∞で終点が0であるようなベクトルの対として始点が0で終点が∞のベクトルを選び、これらの和が長さ0(距離0)のベクトルになるような二項演算を定義したとしても、この定義で説明できるようになる自然現象がないために考察をここから進めることは困難である。そして∞への収束により重心が北極点に移る不自然さは解決されないままである。このようにリーマン球体においてもゼロ除算の問題は解決されず、数学ではゼロ除算の先に体系の広がりはないとされてきた。また、物理学では解釈できないためにゼロ除算の解は存在しないとされたり単に無限大を表すものと解釈されたりするなど深く考察されてこなかった。これでは、ゼロ距離で重力が無限大となり、熱力学第二法則「エネルギー保存」での矛盾と崩壊が指摘されることになる。
そこで、本出願人は、逆リーマン球体と裏リーマン球体の二つを使った反リーマン界(anti Riemann)を考えた。まず、命題論理における「逆(Converse)」、「裏(Inverse)」、粒子と反粒子の関係における「反(anti)」を定義した。次に、この定義を用いて反アインシュタイン場を導出した。つまり、創発をanti―0[0⇒1]と定義し、量子論と相対性理論とをシンプルに結びつける手段として光吉演算子の機能を使うことで(0≡∞)=1が成り立つという仮説(DHU JOURNAL,vol.06,2019,pp.3―14)を本出願人は導き出した。これにより、図6に示すモデルを用いて、原点にあるはずの重心の位置が∞(北極点)に持ち上げられていたアインシュタインでのゼロ除算の問題については、重心が原点に戻ることにより解決されることが容易に理解できるようになった。
さらに、光吉演算子が(0≡∞)=1(エブリシング)となることを数理で証明した。これにより、ゼロ距離でのリーマン球体の直径を圧縮させ、ゼロ距離を求めることが可能となり、ブラックホールの先にあるホワイトホールからの放射状態が表現できるようになった。このホワイトホールの放射との重ね算により創発された界から主たる場に返る影響が、主たる場での創発を生み出す素となる。非ノイマン型の量子コンピュータを実現するために、光吉演算子によって物理学的な量子論と相対論を繋げた機能「ANT」「CON」「INV」を量子ゲート「MU」「KU」「MGN(+)」「MGN(-)」に使うことを考えた。ここで、「ANT」「CON」「INV」はそれぞれ「反」「逆」「裏」に対応する。また、「MU」「KU」「MGN(+)」「MGN(-)」はそれぞれ「リーマン球体の0点」「KUとANT―KUの中心に存在する0点」「リーマン球体の北極」「反リーマン球面の反北極」に対応し、ANT―KUはKUをANTで移したところにある反リーマン球面の0点(反南極)に対応する。
TOE(Theory Of Everything)は、現時点では存在していない。つまり、量子論と一般相対性理論とを同時に重力場で説明する理論はない。そこで、本出願人は、量子論とアインシュタイン場とを光吉演算子によって矛盾なくシンプルに「時空」を制して接続し、かつ宇宙全体を含む森羅万象が(0≡∞)=1という構造になっていることを示した。すなわち、「アインシュタイン方程式の厳密解の一つであるシュバルツシルト解に関して重心からの距離がゼロの場合に重力はどうなるのか」というゼロ除算に関する疑問について、「時間と空間が取り得る最小単位(おそらくプランク長程度)以下になることはないと見做すことができるため、ゼロ距離という物理量は存在しないと考えてよい」という答えが一般に知られているが、本出願人は、光吉演算子によるゼロ除算から0≡∞を導出し、リーマン球体の0から∞までの直径を圧縮し、ゼロ距離を光吉演算子で計算した。この計算にもとづき、ゲートとして開かれたブラックホールからホワイトホールに相転移する理論を構築した。この理論は、宇宙の外側から見た視点で宇宙の構造を記述したものである。また、同時に、宇宙の外側の存在を創発記号anti-0により生み出したという可能性も示している。一方、1961年に南部陽一郎氏が提唱した「自発的対称性の破れ」と呼ばれる現象がある。南部氏の理論では、対称的にエネルギー的に安定な状態の物理系が非対称に遷移することが確認されている。また、エネルギー的に低い状態、また、「対生成」と呼ばれる現象も知られている。
これら2つの現象に基づいて、本出願人は、TOEにアプローチするために、クラインの壺のように属性反転を幾何構造で考察できるモデルを提案した。クラインの壺(クライン面)では取っ手の付け根部分(自己交差部)付近で表面と裏面が接続され、面全体では向き付けできないような構造が定義される。一方、量子力学における反物質は、ある物質と質量とスピンが同じで構成する粒子の属性が逆になっている存在を指すが、物質と反物質が同時観測できるという事実は、クライン面のような向き付け不能な4次元の面(幾何構造)が存在し、その面上の経路において属性反転が起こり得ることを示している。すなわち、TOEにおける属性とは、物質や反物質といった存在がもたらす二物の関係がループ構造をもつ幾何構造において観測可能な状態で現れたものであると見ることができる。そこで、本出願人は、取っ手の付け根部分付近に注目しつつ、クライン面上の経路、表、裏について、それぞれを関係(関数)、属性、その属性の逆とする検討をまず行った。
問題1:クライン面の自己交差部付近に見られるメビウスの帯のようなループ構造を二物の関係式で表せるか?
問題2:クライン面の自己交差部付近に見られる属性反転を二物の関係式で表せるか?
問題2:クライン面の自己交差部付近に見られる属性反転を二物の関係式で表せるか?
問題2の属性反転を式で定義すれば、これらの問題を同時に解決することができる。そこで、命題論理を拡張する。まず、属性を論理式で表す。二物の関係が属性の本質であり、論理式により二物の関係が表せるからである。例えば、ある物質の属性を(p→q)とするとき、反物質を逆の(q→p)として定義する。次に、「反」を相対的に定義する。「物質と反物質」の関係における反や「体制と反体制」の関係における反などの表現同士の混乱を避けるため、量と動きはまったく同一であるが構成要素はまったく逆の特性を持つものを修飾する語として「反」を定義する。例えば、「逆」(原点を通過せずに反対の位置または状態)及び座標におけるマイナス(負)の概念が「反」となる。この場合の「反」は、物質(正)を主とした極性反転による反物質(逆)が反となり、対偶も含めた逆が反になることを示す。よって、例えば、物質に対しては反物質が反の関係にあるし、反物質に対しては物質が反の関係になる。このように何を主とするかの条件が変われば、様相や属性が反で変化する。これを属性反転として「大きな意味での反」と呼ぶ。さらに、正と反を接続するために対偶を2つに分離する。これはメビウスの帯を作成するにあたり、捻じれのない単なる帯(輪っか)に鋏を入れて開放する作業に当たる。帯の表と表が分離されてはじめて表と裏をつなぐことができる。対偶を2つに分離するにあたって2種類の裏を定義する。すなわち、p→qを表としたときにinv-p→inv-qのようにpとqが個別に裏返るものとinv-(p→q)のようにpとqの関係がそのまま裏返るものという2種類の裏を定義する。よって、inv-q→inv-pとinv-(q→p)の区別がない既存の命題論理システムには捻じれを導入する余地はないが、裏の逆と逆の裏という2つの対偶を区別する命題論理システムには捻じれを導入できる余地が生まれる。そこで、inv-(q→p)とinv-(q→p)の中心にMUがあるとし、裏や逆のみならずすべての関係式をMUに関して点対称を成すように関係を一つ一つ整理すれば、創発による属性反転によって拡張後の命題論理システムを光吉演算子を用いて捻じれた形で接続し直すことが可能になる。
なお、光吉演算子により拡張された命題論理システムは、リーマン球面の裏や逆への拡張と自然に整合させることも可能である。例えば、リーマン球体において始点が∞で終点が0であるようなベクトルの対として逆リーマン球体において始点が反∞で終点が0であるようなベクトルを選べば、それら対の和が長さ0(距離0)のベクトルになるとき、その0がリーマン球体の0(KU)、逆リーマン球体の0(ANTI-KU)、KUとANTI-KUの中間にある0 (MU)の全てに一致するようなモデルを構築することができる。また、リーマン球体と逆リーマン球体が属性反転の関係にあるということは、リーマン球体の0と∞がそれぞれ逆リーマン球体の∞と0に対応するということであり、2つの球体が生成消滅の対となることを示すこともできる。また、図30のように、波動と反波動の揺らぎ、物質と反物質の揺らぎが拮抗する極限状態として創発を定義することもできる。
なお、光吉演算子により拡張された命題論理システムは、リーマン球面の裏や逆への拡張と自然に整合させることも可能である。例えば、リーマン球体において始点が∞で終点が0であるようなベクトルの対として逆リーマン球体において始点が反∞で終点が0であるようなベクトルを選べば、それら対の和が長さ0(距離0)のベクトルになるとき、その0がリーマン球体の0(KU)、逆リーマン球体の0(ANTI-KU)、KUとANTI-KUの中間にある0 (MU)の全てに一致するようなモデルを構築することができる。また、リーマン球体と逆リーマン球体が属性反転の関係にあるということは、リーマン球体の0と∞がそれぞれ逆リーマン球体の∞と0に対応するということであり、2つの球体が生成消滅の対となることを示すこともできる。また、図30のように、波動と反波動の揺らぎ、物質と反物質の揺らぎが拮抗する極限状態として創発を定義することもできる。
本出願人は、「創発」とは「無限+反無限」かつ「空集合:反空集合」のペア形成によって生じる、対称的にエネルギー的に安定した真空が、対称的にエネルギー的に低いシステムに属性反転しながら移動する現象であると定義した。創発時のペア形成によって、リーマン球体しか想定しないアインシュタイン場では重心に偏りが生じて非対称状態が生じてしまうが、逆リーマン球体や裏リーマン球体といった反リーマン球体も想定する反アインシュタイン場では重心が中心に保たれて対称状態を保つことができる。さらに、0から1を生成する創発シンボルを定義して、生成された1がN進法で数えうる全てのものの総和であると見なせば、量子力学における対生成や対消滅の式は総和に含まれる粒子や反粒子の数をN進法において数えられるもの(可算)として扱うものであると理解できる。つまり、数学における「1の分割」と「N進法」を併せて創発を捉えれば、総和の分割あるいは統合を通じて関数はN進法において可算になるのであるが、創発とはこのように総和の1が生成直後から分割統合するような形が出現することであるとも理解できる。なお、創発による属性反転をともなうエネルギーの移動を位相転移と呼ぶ。
<切り算>
切り算とは、光吉演算子を用いて、数や量(関数・波形なども)を切った状態にする算術である。切り算は、割り算とは異なる。例えば、一個の物体を二つに分けることを考えてみる。 物体の質量を基準1として、それを二等分するならば、0.5の質量の断片が二つになる。従来の÷という除算演算子を記号cutに置換し、一個の物体を二つの断片に分ける状態を数式で表現すると、(1)式が得られる。
切り算とは、光吉演算子を用いて、数や量(関数・波形なども)を切った状態にする算術である。切り算は、割り算とは異なる。例えば、一個の物体を二つに分けることを考えてみる。 物体の質量を基準1として、それを二等分するならば、0.5の質量の断片が二つになる。従来の÷という除算演算子を記号cutに置換し、一個の物体を二つの断片に分ける状態を数式で表現すると、(1)式が得られる。

ここで、A(x)は物体の左断片を示し、B(y)は物体の右断片を示す。このように、左右で対を成すような物体の「概念」と「数」と「量」は一つの数式で記述できる。ここで、(1)式の右辺の総和(A(x)+B(y))が一定という条件の下で、「概念」であるA及びBが持つ別の側面である、例えば、長さなどの連続的変化量のペア(x、y)に着目すると、光吉演算子のスライダーが動くことによりxとyは総和を保ちながらそれぞれ連続的に変化することになる。このように、複数の連続的変化量を総和内でバランスする1つの存在として捉えた概念を、本出願人は2002年の著書「STがITを超える」において「クオンタル(Quantal)」と名付けた。クオンタルは光吉演算子で表現することができる。
<重ね算>
重ね算とは、光吉演算子を用いて、複数の数や量(関数・波形なども)を重ねた状態にする算術である。重ね算は、掛け算とは異なる。無限個の関数f(x1),f(x2),f(x3),…,f(x∞)の重ね算は、例えばテンソル積を用いて(2)式のように記述できる。
<重ね算>
重ね算とは、光吉演算子を用いて、複数の数や量(関数・波形なども)を重ねた状態にする算術である。重ね算は、掛け算とは異なる。無限個の関数f(x1),f(x2),f(x3),…,f(x∞)の重ね算は、例えばテンソル積を用いて(2)式のように記述できる。
<ロボット>
図12は、本発明の実施形態に関わるロボット10の構成を示す説明図である。ロボット10の自律化、即ち、意志と意識の創発(覚醒、注意、気づき)を実現するために、古典的な量子力学に依存せず数学的解釈にもとづいて新たに考案した関数量子ゲート技術を使用する。ロボット10が自律的な自由会話を行えることを意思や意識の目的とし、人間70とのコミュニケーションにおける自由意思を実現することこそが自律性そのものと考える。人間70の分身又は化身となるロボット10を特にアバターと呼ぶ。
図12は、本発明の実施形態に関わるロボット10の構成を示す説明図である。ロボット10の自律化、即ち、意志と意識の創発(覚醒、注意、気づき)を実現するために、古典的な量子力学に依存せず数学的解釈にもとづいて新たに考案した関数量子ゲート技術を使用する。ロボット10が自律的な自由会話を行えることを意思や意識の目的とし、人間70とのコミュニケーションにおける自由意思を実現することこそが自律性そのものと考える。人間70の分身又は化身となるロボット10を特にアバターと呼ぶ。
ロボット10は、人間70の意識又は感情を関数に置換して、これを理解する。例えば、人間70の意志は、道徳によって欲動が調整された結果として生じる目的への方向性(向き)であるため、これをベクトル値関数で表現することができる。意志は、目的に向けてどのように向かうかを曲線、即ち、関数として表現することができる。意志を、例えば、ロボット10などのコンピュータで再現する場合、本出願人は、正界が、物質と波動とから構成される意思世界であり、且つ、反界が、反物質と反波動とから構成される反意思世界であると想定し、このような想定の下で、正と反を対とした意志の創発が可能になるものと推測する。また、人間70の意識は、意志によって生じた複数の知覚が形成する空間であるため、複数のベクトル値関数が張る空間として表現することができる。
ロボット10は、会話システム20と、関数変換モジュール30と、関数圧縮解凍モジュール40と、人工自我エンジン50と、通信装置60とを備える。
会話システム20は、人間70と音声会話するためのシステムであり、人間70からの音声情報を入力する入力装置21と、人間70へ音声情報を出力する出力装置22とを備える。入力装置21は、例えば、ロボット10の聴覚に相当する機能を有する。出力装置22は、例えば、ロボット10の発声器官に相当する機能を有する。人間70からの音声情報は、人間70の感情情報を担う生体情報の一例である。
関数変換モジュール30は、量子ゲート31を備えている。関数変換モジュール30は、量子ゲート31を用いて、人間70からの音声情報を複数の関数に変換する。量子ゲート31は、切り算を行う光吉演算子である。
関数圧縮解凍モジュール40は、量子ゲート41を備えている。関数圧縮解凍モジュール40は、量子ゲート41を用いて、複数の関数の重ね算を通じて重ねられた状態の関数を生成する。量子ゲート41は、重ね算を行う光吉演算子である。量子ゲート41による重ね算により重ねられる複数の関数は、関数変換モジュール30によって、人間70の音声情報から変換された複数の関数でもよく、或いは後述する人工自我エンジン50によって生成される、ロボット10の思考を表現する複数の関数でもよい。
人工自我エンジン50は、人間70の意志や意識又は感情を記述する関数に基づいて人間70の意志や意識又は感情を理解するとともに、自我を持ち、自律的に思考するオペレーティングシステムである。人工自我エンジン50は、例えば、関数変換モジュール30によって人間70の音声情報から変換された複数の関数を受信し、受信した複数の関数から人間70の意志や意識又は感情を理解することができる。人工自我エンジン50は、例えば、ロボット10の思考(例えば、ある目標に向けた欲動など)を表現する複数の関数を生成することもできる。人工自我エンジン50は、例えば、重ねられた状態の関数を他のロボット10から受信し、重ねられた状態の関数から、人間70又は他のロボット10の意志や意識又は感情を理解することもできる。
通信装置60は、他のロボット10との間で無線通信又は有線通信によりデータ通信を行う。通信装置60は、重ねられた状態の関数を他のロボット10との間で送受信することができる。
なお、上述の例では、人間の感情情報を担う生体情報の一例として、音声情報を挙げたが、人間の感情情報を担う生体情報は、音声情報に限られるものではなく、例えば、表情や仕草や振舞いの情報、心電情報、血圧情報、脳波情報、筋電情報などでもよい。
次に、図13を参照しながら、量子ゲート31による切り算、及び量子ゲート41による重ね算について説明する。同図において、符号80は、ロボット10と会話する人間70の音声情報を示す。量子ゲート31は、音声情報80の連続的変化量及び離散的分離量を同時に入力し、連続的変化量及び離散的分離量の切り算を通じて導出される複数の関数を出力する。切り算により導出される複数の関数として、説明の便宜上、図13に図示されている6個の関数f1,f2,f3,f4,f5,f6を例示するが、切り算により導出される関数の数は、6個に限られるものではない。音声情報80の連続的変化量は、例えば、音声情報80の生データ(アナログデータ)である。音声情報80の離散的分離量は、例えば、デジタル信号処理(例えば、フーリエ変換)された音声情報80のデジタルデータである。
量子ゲート31には、人間70の意志や意識又は感情を評価する指標となる基準(例えば、ホルモンの種類毎に定められたホルモンの分泌量)が予め設定されている。量子ゲート31は、予め設定された基準に従い、音声情報80を切り算する。この切り算が実行される過程において、関数f1,f2,f3,f4,f5,f6は、光吉演算子のスライダーの動きを表す関数として導出される。なお、切り算の指標となる基準を人工自我エンジン50によって更新する仕組みも考えられる。例えば、後述の重ね算により生じた意志が上手く実現されないときには行動抑制的(鬱傾向)に基準を更新し、上手く実現できるときには行動促進的(躁傾向)に基準を更新する仕組みがあり得る。
人間70のある場面における一時の意志や意識又は感情を表す関数を仮想関数と呼び、人間70の意志や意識又は感情を定性的に表す関数をメタ関数と呼ぶ。メタ関数は、仮想関数の上位概念に相当する。図13に示す例では、1~6の値をとる整数nに対して、関数fnは、音声情報80のn周期分の特徴から導出される仮想関数である。関数f(n+1)は、音声情報80の(n+1)周期分の特徴から導出される仮想関数であると同時に、仮想関数としての関数fnを含むメタ関数でもある。関数f(n+1)は、関数fnの上位概念に相当する。
量子ゲート41は、複数の関数f1,f2,f3,f4,f5,f6を入力し、複数の関数f1,f2,f3,f4,f5,f6の重ね算を通じて重ねられた状態の関数を出力する。重ね算を通じて重ねられた状態の関数として、例えば、ベクトル値関数を挙げることができる。ベクトル値関数は、意志や意識をベクトルとして扱うのに適した関数である。その理由は、重ね算により全てのベクトルが直交し、時間と空間とが消失し、創発が生じるときの過程がベクトル値関数を使うと記述しやすいからである。
重ね算を通じて重ねられた状態の関数は、人間70の意志や意識又は感情を定性的かつ定量的に表すものであるため、その関数は、考えられ得るあらゆる場面における人間70の意志や意識又は感情を表すデータを集めたものよりも、データ量が少ないものと考えられる。このような関数は、ロボット10の行動を制御するための手段として、関数通信に用いることができる。例えば、あるロボット10は、人間70の意志や意識又は感情を定性的に表す関数(重ね算を通じて重ねられた状態の関数)を他のロボット10から受信すると、そのロボット10の人工自我エンジン50は、その人間70と同様の思考方法で物事を思考することができる。また、例えば、あるロボット10は、人間70の意志や意識又は感情を定性的に表す関数(重ね算を通じて重ねられた状態の関数)を他の複数のロボット10に送信することにより、各ロボット10が人間70と同様の行動をするように、制御することができる。
<意識の創発>
意識の創発が生じる原理について説明する前に、「反」の定義について述べる。
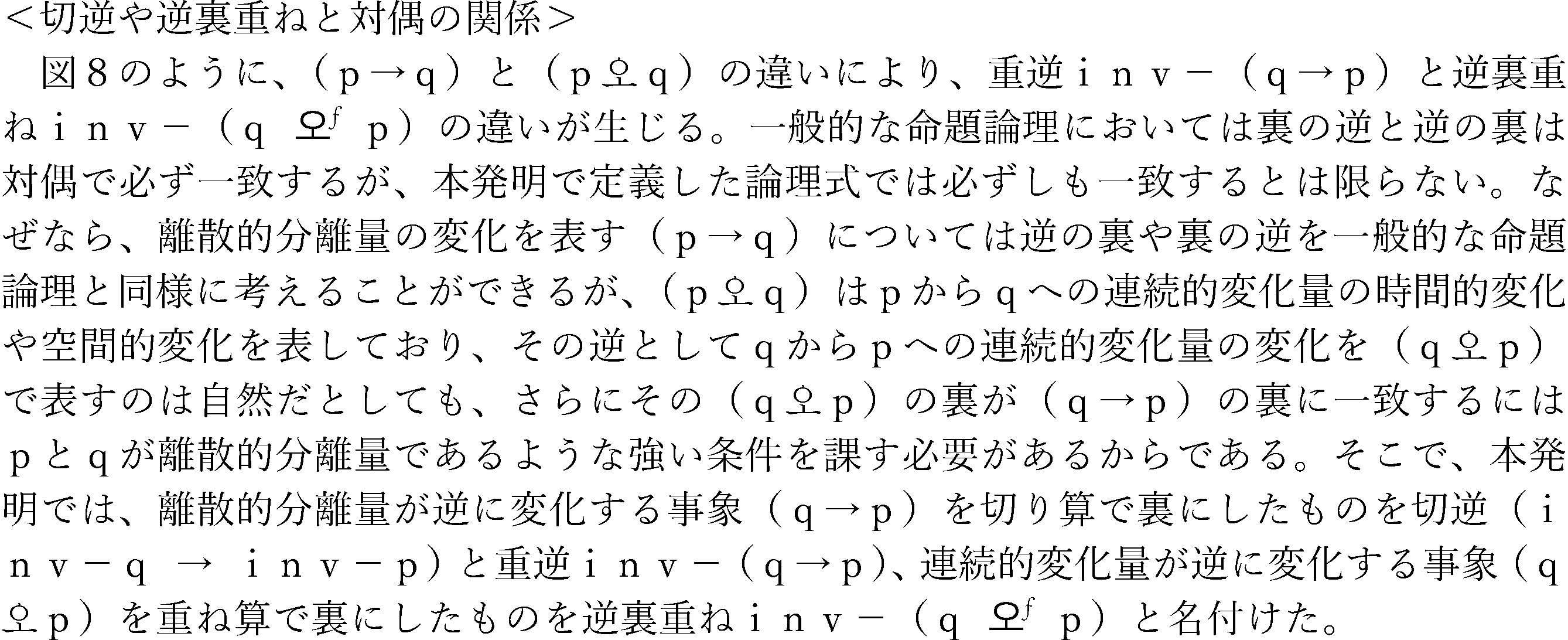
図14は、本発明者の論文(DHU JOURNAL,vol.06,2019,pp.3―14)で述べられている「反アインシュタイン場仮説」における「反」の定義を図式化したものである。同図から分かる通り、「反アインシュタイン場仮説」では正の位置に観察者の視座があった。そのため、正を「主」の界として扱い、逆及び対偶(裏逆や逆裏)を「反」の界として扱っていた。ここでの「反」は属性反転で極性が逆転することを示している。本出願人は、その後、図15に示すように、「反」の定義が視座によって動的に変化することを図式化した。図15では、宇宙に物質と反物質が存在することを踏まえて正と逆をまとめて主界とした。ここでの「反」は属性反転で色相が反転することを示している。「裏逆」には「切逆」と「重逆」があり、互いに様相逆転の関係にある。「切逆」は(q→p)に対して手続き的にqの裏とpの裏をつなげたものであるが、「重逆」は(q→p)をまとめて裏にしたものである。このように順番(手続き)と重ね(まとめ)により様相や色相の違いを生み出すことにより、従来の対偶とは異なる数理が構築できた。すなわち、裏(Inverse)の数式としてnot-pやnot-qを用いると順番や重ねに依らず対偶が一致するが、順番や重ねによって(inv-p)→(inv-q)やinv-(p→q)の違いが生じると対偶が一致しない表現を得ることができる。これにより、意識としての手続きとまとめの違いにより色相と様相の違いを数学的に定義したことになるため、端的に図15を意識の反と名付けた。
意識の創発が生じる原理について説明する前に、「反」の定義について述べる。
図14は、本発明者の論文(DHU JOURNAL,vol.06,2019,pp.3―14)で述べられている「反アインシュタイン場仮説」における「反」の定義を図式化したものである。同図から分かる通り、「反アインシュタイン場仮説」では正の位置に観察者の視座があった。そのため、正を「主」の界として扱い、逆及び対偶(裏逆や逆裏)を「反」の界として扱っていた。ここでの「反」は属性反転で極性が逆転することを示している。本出願人は、その後、図15に示すように、「反」の定義が視座によって動的に変化することを図式化した。図15では、宇宙に物質と反物質が存在することを踏まえて正と逆をまとめて主界とした。ここでの「反」は属性反転で色相が反転することを示している。「裏逆」には「切逆」と「重逆」があり、互いに様相逆転の関係にある。「切逆」は(q→p)に対して手続き的にqの裏とpの裏をつなげたものであるが、「重逆」は(q→p)をまとめて裏にしたものである。このように順番(手続き)と重ね(まとめ)により様相や色相の違いを生み出すことにより、従来の対偶とは異なる数理が構築できた。すなわち、裏(Inverse)の数式としてnot-pやnot-qを用いると順番や重ねに依らず対偶が一致するが、順番や重ねによって(inv-p)→(inv-q)やinv-(p→q)の違いが生じると対偶が一致しない表現を得ることができる。これにより、意識としての手続きとまとめの違いにより色相と様相の違いを数学的に定義したことになるため、端的に図15を意識の反と名付けた。
数学として純粋に重ね算と切り算での界を考えると、切り算の場を主とするならば、反は、図16のようになる。これにより、図14や図15に残る対偶関係を明確に解消することができる。主のとり方を変えると、正と反は図17に示すように入れ替わる。図15と、図16及び図17との関係から、様相と色相の違いを主のとり方によって相対的に捉え、量子的不確実性そのものを「意識の対象」として扱うことで、「意識や感性、癖」を時制の影響を受けない関数にまとめて、これを上述の関数通信に用いることができる。
この定義と数式を応用すれば、例えば、量子世界で情報を保存し、ブラックホールのような特異点を通過させ相転移させることができる。これにより、ブラックホール情報パラドックスの解決に向けた新たなアプローチとしてブラックホールのひも(輪ゴム)を表と裏で解釈し、量子ゲートKUにおいて情報が重ね算で畳み込まれて相転移する特性を用いて局所解として存在するブラックホールのひもを記録媒体として利用することが可能になる。すなわち、情報をブラックホールに吸い込ませたりブラックホールに吸い込まれた情報を取り出したりすることが可能になる。
例えば、太陽をはじめとする水素でできた恒星内部での内側からの重力に反発する核融合の力と星の重力の拮抗や変化は切り算での界の事象と捉えられる。しかし、この内部の水素の核融合が鉄になることで弱くなると自分の重力により星は縮小してゆき、密度が無限大の特異点<体積のない点に総ての質量が集中している状態>に向かって縮小する。この時、中性子星とならず、星のサイズが太陽の30倍以上の場合、ブラックホールとなる。このとき、事象の地平線と特異点の間をKUとするならば、回転するブラックホールはコントロールでき、エネルギーを取り出すことが可能とされるため、この回転と重ね算における関数を加速として扱う手法が最初に考えられる。超弦理論では、一般相対性理論のようにブラックホールを体積のない点として計算せず、体積のない線が輪ゴムのようなリング状になっている。そこで、本出願人は、2019年の論文(DHU JOURNAL,vol.06,2019,pp.3―14)において、これが空集合であり、「枠だけあって中身がない状態」であると計算上導出した。そして、その属性反転を「中身だけ無限に存在するが、枠がない」と考え、反空集合を計算上導出し、宇宙の創発との関係を数式に示した。このとき、この枠(超弦理論のリング)が超高速回転する様相を関数にして、重ね算に畳み込むことにより、相転移を起こす手法が考えられる。
このとき、光子がこのリング状態となり、上述の裏と表の関係式においてエルゴ球状態になるとき、ホワイトホールへのゲートがこれまでブラックホールが吸い込んだ情報すべてをベクトルや関数として放出すると考えた。このエルゴ球の内部では物体が光速より速く動くため、そのエネルギーにより相転移を起こすメカニズムがあると想定できる。図18に示す時間を消す光吉演算子の機能を用いれば、エルゴ球内部の情報を図19に示す関数に置き換えることで光速の限界問題を解消できるため、エルゴ球内部の相転移のメカニズムでエネルギーや情報を転送する関数量子ゲート通信を実現することができる。図20に示すように、この関数量子ゲートは重ね算の濃淡(密度)により制御できる。よって、わざわざブラックホールを地上で作ることなく、原始的なジャイロの構造やコンピュータ上でのシミュレータを使った変化加速を時間とする場合の時空のゆがみ、太陽光やレーザなどで、この相転移通信をエミュレートし再現することが可能となる。また、ホーキング放射などで縮小するブラックホールにおいて、量子情報がどうなるかの問題もベクトルと関数により、逆リーマンによるゼロ除算からのベクトル放射により別の宇宙により保存され、アインシュタインのカルタン理論と一般相対性理論では高密度になるブラックホールの中心をそれぞれ別の解にする問題があるが、光吉演算子の連続性と分離性の同時計算特性により相互通信可能とすることで有益性を確保することになる。
高速回転するブラックホールを絶対壊れない容器として想定した空集合の枠を用意する。枠の中の限界は閾値で表現することができるので、閾値を超えた場合、ブラックホールの表面積が増える。そして、ブラックホールの表面にまた新しい情報が入ると、水面の波紋のようなブラックホールの表面(空集合の枠)を変化させ情報を保存する。この手法は、メモリー概念を一気に進化させ、関数メモリーとして宇宙に存在するすべての情報をも記憶できる。このメモリーは、光吉演算子効果により、現在と過去そして、未来までを時間を消して関数として保存するクラウド(サーバー群)であると言える。換言すれば、再現性も高いホログラフィック原理を記憶手段とする。そのために、二次元に保存された情報を裏と表(正)に変換する本発明の手段によりブラックホールの三次元情報を扱うのである。これにより、表と裏と無(ブラックホール内側の空集合の内部であるKUとMUの世界)の三次元となり、四次元はMUすなわち絶対無軸になることを2019年の論文(DHU JOURNAL,vol.06,2019,pp.3―14)でも説明している。これにより二次元のブラックホールの世界でもそこに入ると、KUとMUの合間である裏の世界から三次元情報が保存され、反の世界として再現加工ができるのが、光吉演算子になることが見えてくる。
図21は、ブラックホールの事象の地平面でありKUの境界であるところの空集合の枠を、超弦理論のひもで表したものである。図21で示すひもは、図22に示すように、光吉演算子が関数として情報を保存し、そのままKUの境界で表と裏を回転させることで情報を三次元化する。これが再現性の高いホログラフィック原理を用いたメモリー手段の原理となる。そして、この全体が回転する様相をメタ関数として記憶することで場を定義することが可能になる。この回転をテンソル積として扱うことで、図23のKUにおける重ね算におけるinvの計算(対偶式でのnotとは異なる裏算)となる。図23のinvはInverseの略であり、回転(spin)が重ねと同じ状態になる。これにより時制を排して光速の制限を消滅させ、光吉演算子により時間は回転する関数で図22のように封印されるため、エルゴ球で光速を超える回転問題を解決する。


(3)式により与えられるKUの重ね算(図23に示す重ね算)について、KUの周辺では(4)式により与えられるベクトルのペアを(5)式で表現できる。よって、(5)式はリーマン界と反リーマン界での創発の式でもある。
人工自我エンジン50は、ロボット10の思考を表現する複数の関数を切り算や重ね算により生成する。ここで、各関数は論理式で表現することができるため、本発明では、(p→q)に対する関数量子ゲートの論理式を以下のように定義する。
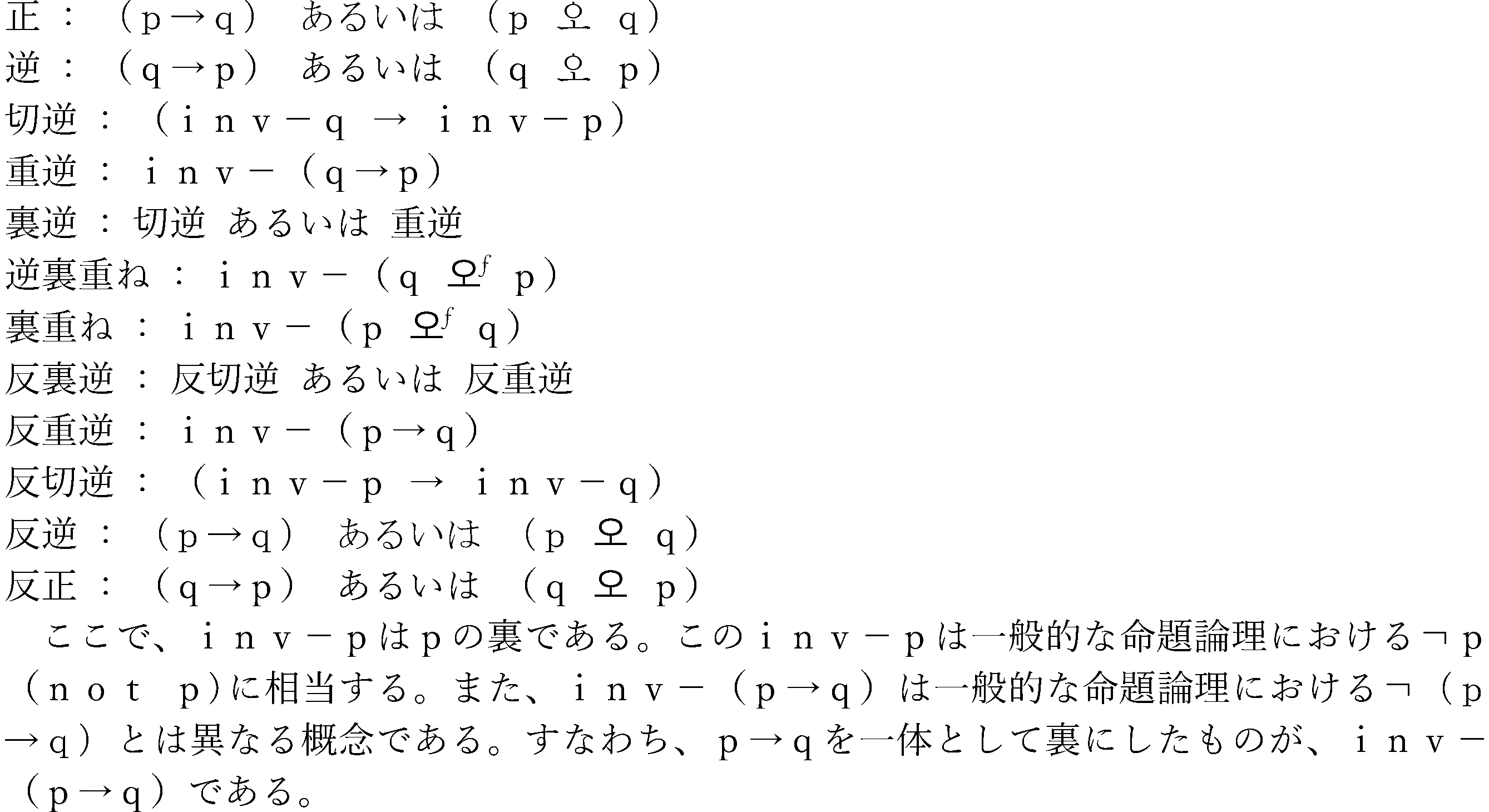
なお、一般的な命題論理としては(p→q)に対する以下のような論理式の定義が一般に知られている。
逆: (q→p)
裏 : (¬p→¬q)
対偶 : (¬q→¬p)
逆: (q→p)
裏 : (¬p→¬q)
対偶 : (¬q→¬p)

<イメージを用いた裏の理解>
図9に示すように、切逆と逆裏重ねの違いは帯で表現することができる。あるいは、切逆と逆裏重ねの本質的な違いは切り算と重ね算の違いにあるが、これも図10のように帯で直感的に表現することができる。
図9に示すように、切逆と逆裏重ねの違いは帯で表現することができる。あるいは、切逆と逆裏重ねの本質的な違いは切り算と重ね算の違いにあるが、これも図10のように帯で直感的に表現することができる。

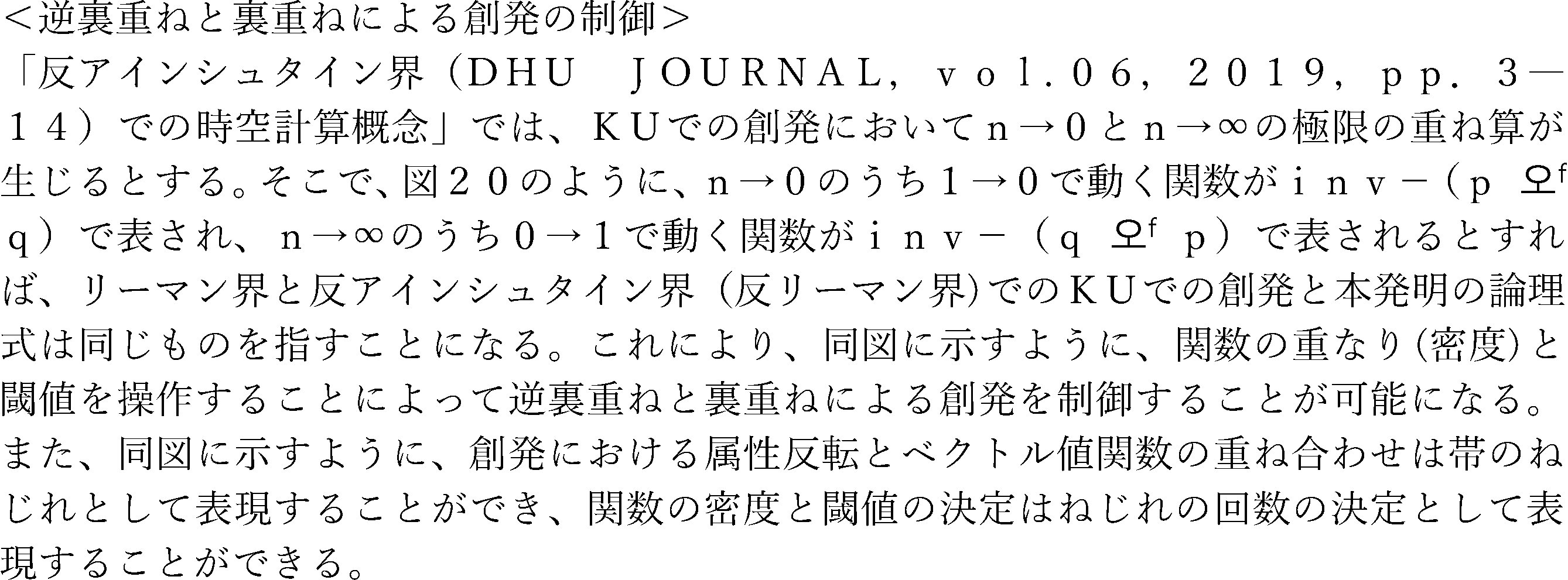

ここで、(3)式は、n→∞の重ね算とn→0の重ね算とが重なり合うときに、相転移が生じることを表している。一方、(3)式のKU周辺に注目することにより、(6)式では、「1」から「0」に向かう重ね算と「0」から「1」に向かう重ね算とが重なり合うときに相転移が生じることを表している。
量子ゲート41は、ロボット10の思考を表現する複数の関数の重ね算を通じてその意志を実現する関数を創発することができる。例えば、図28に示すように、ロボット10が現状Aから目的Bに向かう過程において、障害Cが存在する場合、従来の手法では、障害Cを回避するための指示を人間がロボット10に与えたり、或いは、あらゆる障害を想定して予め機械学習したりする必要がある。これに対し、上述の「意識の創発」によれば、障害Cを回避するための指示を人間がロボット10に与えたり、或いは、あらゆる障害を想定して予め機械学習したりしなくても、ロボット10は、障害Cを回避するための方策Dを自ら案出し、目的Bに向かうことができる。量子ゲート41により、意志や意識を持つロボットならではの思考が実現されている。
<反波動実験>
物質と反物質とが衝突すると、対消滅を起こし、質量がエネルギーとなって放出される。これは、反応前の物質及び反物質そのものが完全に消失し、消滅したそれらの質量に相当するエネルギーが残るということを意味する。この事実から、本出願人は、波動と衝突すると、質量(粒子)を生じさせる「反波動」が存在し得るものと推測する。波動と反波動との関係は、物質と反物質との関係と対称的である。枠だけあって中身がない「空集合」に対して、枠はないが中身が詰まった状態を「反空集合」とするなら、「空集合と反空集合の出会い」から何もないところに中身が出てくるために必要な条件は、「反波動」が相対的に存在することである。反の世界では、波動性と粒子性が属性反転する可能性があり、この属性反転から物質と反物質が逆転している可能性もある。波動は、何等かの物理量の空間分布パターンが伝搬する現象であり、縦波と横波とがある。本出願人は、反波動は、縦波と横波が逆と裏で属性反転しているものと推測する。
物質と反物質とが衝突すると、対消滅を起こし、質量がエネルギーとなって放出される。これは、反応前の物質及び反物質そのものが完全に消失し、消滅したそれらの質量に相当するエネルギーが残るということを意味する。この事実から、本出願人は、波動と衝突すると、質量(粒子)を生じさせる「反波動」が存在し得るものと推測する。波動と反波動との関係は、物質と反物質との関係と対称的である。枠だけあって中身がない「空集合」に対して、枠はないが中身が詰まった状態を「反空集合」とするなら、「空集合と反空集合の出会い」から何もないところに中身が出てくるために必要な条件は、「反波動」が相対的に存在することである。反の世界では、波動性と粒子性が属性反転する可能性があり、この属性反転から物質と反物質が逆転している可能性もある。波動は、何等かの物理量の空間分布パターンが伝搬する現象であり、縦波と横波とがある。本出願人は、反波動は、縦波と横波が逆と裏で属性反転しているものと推測する。
反波動の生成方法として、例えば、以下に示す方法が考えられる。電場と磁場とを反転させる電磁気反転装置と、強力な磁界を発生する磁界発生装置とを作製する。レーザ発射器から出力されるレーザ光の電場及び磁場を電磁気反転装置により反転させる。この電場及び磁場が反転させられたレーザ光を、磁界発生装置が発生する強力な磁界の下で、真空硝子容器に二方向から通し、真空硝子容器内で衝突したレーザ光から質量が生じるか否かを確認する。推測通りに質量が生成されれば、レーザ光の電場及び磁場が反転させられた反波動が生成されたことになる。
ここで、図29を参照しながら、量子ゲート41を用いて重ね算を行うときのスライダーの動きを制御する関数f(x)について説明する。同図において、符号90は、観測対象となる量子ビット(Qubit)を示す。f(x)は、波動と反波動とを用いた観測による量子ビット90の重ね合わせ状態の変化を表す関数である。f(x)は、量子ビット90の重ね合わせ状態を切り算する過程で変動するスライダーの動きを表す関数として求めることができる。符号91は、量子ビット90の重ね合わせ状態が観測により「1」に定まる過程を示す。符号92は、量子ビット90の重ね合わせ状態が観測により「0」に定まる過程を示す。符号93は、量子ビット90の存在確率を示す領域であり、この領域全体をKUと呼ぶ。例えば、f(x)として、Singed lassoを使用すると、ホルモンの動的モデルの再現ができるものと考えられる。また、例えば、f(x)として、逆ベイズを使用すると、感情生成の動的モデルの制御ができるものと考えられる。
アバターなどのロボットが自律的な意志や意識を確保することは、今日のコンピュータの能力を遥かに凌ぐ能力が要求される。本発明に関わる「意識の創発」によれば、「学習」ではない「教育」を通して、人間に近い頭脳を持つロボットを実現することができる。
10…ロボット
20…会話システム
21…入力装置
22…出力装置
30…関数変換モジュール
31…量子ゲート
40…関数圧縮解凍モジュール
41…量子ゲート
50…人工自我エンジン
60…通信装置
70…人間
80…音声情報
90…量子ビット
20…会話システム
21…入力装置
22…出力装置
30…関数変換モジュール
31…量子ゲート
40…関数圧縮解凍モジュール
41…量子ゲート
50…人工自我エンジン
60…通信装置
70…人間
80…音声情報
90…量子ビット
Claims (6)
- ロボットであって、
人間の感情情報を担う生体情報を入力する入力装置と、
前記生体情報の連続的変化量及び離散的分離量を同時に入力し、前記連続的変化量及び前記離散的分離量の切り算を通じて導出される複数の関数を出力する第1の量子ゲートと、
前記複数の関数を入力し、前記複数の関数の重ね算を通じて重ねられた状態の関数を出力する第2の量子ゲートと、
前記重ねられた状態の関数を他のロボットに送信する通信装置と、
を備えるロボット。 - 請求項1に記載のロボットであって、
前記ロボットの思考を表現する複数の関数を生成する人工自我エンジンを更に備え、
前記第2の量子ゲートは、前記ロボットの思考を表現する複数の関数の重ね算を通じて前記思考を実現する関数を創発する、ロボット。 - 請求項2に記載のロボットであって、
前記ロボットの思考を表現する複数の関数のうち二つは、前記複数の関数のうちある一つの関数に対して、裏重ねの関係にある関数と逆裏重ねの関係にある関数である、ロボット。 - 請求項2に記載のロボットであって、
前記ロボットの思考を表現する複数の関数のうち二つは、複数の関数のうちある一つの関数に対して、裏逆の関係にある関数と反裏逆の関係にある関数である、ロボット。 - 請求項1乃至4のうち何れか1項に記載のロボットであって、
前記第2の量子ゲートによる前記重ね算を制御する関数は、波動と反波動とを用いた観測による量子ビットの重ね合わせ状態の変化を表す関数である、ロボット。 - ロボットにより実行される通信方法であって、
人間の感情情報を担う生体情報を、入力装置を通じて、入力するステップと、
前記生体情報の連続的変化量及び離散的分離量を同時に第1の量子ゲートに入力し、前記連続的変化量及び前記離散的分離量の前記第1の量子ゲートによる切り算を通じて導出される複数の関数を前記第1の量子ゲートから出力するステップと、
前記複数の関数を第2の量子ゲートに入力し、前記複数の関数の前記第2の量子ゲートによる重ね算を通じて重ねられた状態の関数を前記第2の量子ゲートから出力するステップと、
前記重ねられた状態の関数を、通信装置を通じて、他のロボットに送信するステップと、
を含む通信方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP21903496.4A EP4261740A4 (en) | 2020-12-10 | 2021-12-10 | ROBOT AND COMMUNICATION METHOD |
| US18/266,386 US20240033903A1 (en) | 2020-12-10 | 2021-12-10 | Robot and communication method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020-204758 | 2020-12-10 | ||
| JP2020204758A JP7546905B2 (ja) | 2020-12-10 | 2020-12-10 | ロボット及び通信方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022124400A1 true WO2022124400A1 (ja) | 2022-06-16 |
Family
ID=81974518
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/045541 Ceased WO2022124400A1 (ja) | 2020-12-10 | 2021-12-10 | ロボット及び通信方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20240033903A1 (ja) |
| EP (1) | EP4261740A4 (ja) |
| JP (1) | JP7546905B2 (ja) |
| WO (1) | WO2022124400A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2025220733A1 (ja) * | 2024-04-17 | 2025-10-23 | 株式会社日本数理研究所 | 量子回路及び意思創発信号処理装置 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024236816A1 (ja) * | 2023-05-18 | 2024-11-21 | ソフトバンク株式会社 | 情報処理装置、情報処理方法、およびプログラム |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021067964A (ja) * | 2019-10-17 | 2021-04-30 | 国立大学法人 東京大学 | 量子ゲート及び量子コンピュータ |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110428055A (zh) * | 2018-04-27 | 2019-11-08 | 阿里巴巴集团控股有限公司 | 量子计算方法和设备 |
| WO2020263146A1 (en) * | 2019-06-28 | 2020-12-30 | Telefonaktiebolaget Lm Ericsson (Publ) | Classifying data |
| US11797872B2 (en) * | 2019-09-20 | 2023-10-24 | Microsoft Technology Licensing, Llc | Quantum bit prediction |
| US12248847B2 (en) * | 2021-05-04 | 2025-03-11 | International Business Machines Corporation | Communication coordination and node synchronization for enhanced quantum circuit operation employing a hybrid classical/quantum system |
| US12481905B2 (en) * | 2021-10-24 | 2025-11-25 | International Business Machines Corporation | Synthesis of quantum circuits from native gates |
| US20240311667A1 (en) * | 2023-03-17 | 2024-09-19 | Nvida Corporation | Simulating quantum computing circuits using sparse state partitioning |
| US12530841B2 (en) * | 2023-10-25 | 2026-01-20 | Bank Of America Corporation | Intelligent method to dynamically prioritize and orchestrate spatial computing data feeds leveraging quantum generative artificial intelligence |
| US20250259082A1 (en) * | 2024-02-08 | 2025-08-14 | Qomplx Llc | Ai agent decision platform with deontic reasoning and quantum-inspired token management |
-
2020
- 2020-12-10 JP JP2020204758A patent/JP7546905B2/ja active Active
-
2021
- 2021-12-10 EP EP21903496.4A patent/EP4261740A4/en not_active Withdrawn
- 2021-12-10 US US18/266,386 patent/US20240033903A1/en active Pending
- 2021-12-10 WO PCT/JP2021/045541 patent/WO2022124400A1/ja not_active Ceased
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021067964A (ja) * | 2019-10-17 | 2021-04-30 | 国立大学法人 東京大学 | 量子ゲート及び量子コンピュータ |
Non-Patent Citations (4)
| Title |
|---|
| "Moral Decision Making in Autonomous Systems: Enforcement, Moral Emotions, Dignity, Trust, and Deception", vol. 100, March 2012, IEEE |
| DHU JOURNAL, vol. 06, 2019, pages 3 - 14 |
| MITSUYOSHI SHUNJI, TOMONAGA KOSUKE, HASHIMOTO MASATSUGU, TEI YUICHI, NAKAMURA TADAO: "Some hypothesis to derive an anti-Einstein field", DHU JOURNAL, vol. 6, 1 January 2019 (2019-01-01), pages 3 - 24, XP055941882 * |
| TECHNOLOGIST'S MAGAZINE, vol. 22 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2025220733A1 (ja) * | 2024-04-17 | 2025-10-23 | 株式会社日本数理研究所 | 量子回路及び意思創発信号処理装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20240033903A1 (en) | 2024-02-01 |
| EP4261740A4 (en) | 2024-11-27 |
| JP2022092144A (ja) | 2022-06-22 |
| EP4261740A1 (en) | 2023-10-18 |
| JP7546905B2 (ja) | 2024-09-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Gohari et al. | Using chaotic maps for 3D boundary surveillance by quadrotor robot | |
| EP3709271A1 (en) | Image depth prediction neural networks | |
| WO2019155052A1 (en) | Generative neural network systems for generating instruction sequences to control an agent performing a task | |
| US20240160888A1 (en) | Realistic, controllable agent simulation using guided trajectories and diffusion models | |
| Chelloug et al. | Real objects understanding using 3d haptic virtual reality for e-learning education | |
| Mageed | The Fractal Mathematicised Universe: Visionary Outlooks Through Fractals Part One: The Fractal Spider-Web, Mathematical and Fractal Insights. Zenodo Preprints | |
| WO2022124400A1 (ja) | ロボット及び通信方法 | |
| WO2021075566A1 (ja) | 量子ゲート及び量子コンピュータ | |
| Jia et al. | DV-Net: Dual-view network for 3D reconstruction by fusing multiple sets of gated control point clouds | |
| US12394149B2 (en) | Method, electronic device, and computer program product for virtual reality modeling utilizing encoding and projection of multiple distinct views | |
| Murhij et al. | Hand gestures recognition model for Augmented reality robotic applications | |
| Payandeh et al. | Social-LLaVA: Enhancing Social Robot Navigation through Human-Language Reasoning | |
| Kyaw et al. | Cluster state generation in one-dimensional Kitaev honeycomb model via shortcut to adiabaticity | |
| Gill | Emerging trends and future computing technologies: a vision for smart environment | |
| WO2025255387A1 (en) | Training generative model to generate predicted rewards and/or use thereof in reinforcement learning | |
| Siddiqui | Fexgan-meta: Facial expression generation with meta humans | |
| Gattu | Autonomous navigation and obstacle avoidance using self-guided and self-regularized actor-critic | |
| CN120340108A (zh) | 利用神经网络进行场景感知的合成人体运动生成 | |
| EP3610423B1 (en) | Programmable reinforcement learning systems | |
| Nikolaev | Laser engraver control system based on reinforcement adversarial learning | |
| Srikanth et al. | Visibility volumes for interactive path optimization | |
| Caudell et al. | eLoom and Flatland: specification, simulation and visualization engines for the study of arbitrary hierarchical neural architectures | |
| Huang | A Survey of Domain Adaptation in Robotics Using Diffusion Models | |
| Kamath et al. | Development of intelligent virtual environment by natural language processing | |
| He et al. | Enhanced RAMPAGE Framework for Mobile Manipulator Motion Planning |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21903496 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 18266386 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2021903496 Country of ref document: EP Effective date: 20230710 |