WO2022163829A1 - 統合制御装置、制御方法、サーバ、プログラム、記憶媒体 - Google Patents
統合制御装置、制御方法、サーバ、プログラム、記憶媒体 Download PDFInfo
- Publication number
- WO2022163829A1 WO2022163829A1 PCT/JP2022/003411 JP2022003411W WO2022163829A1 WO 2022163829 A1 WO2022163829 A1 WO 2022163829A1 JP 2022003411 W JP2022003411 W JP 2022003411W WO 2022163829 A1 WO2022163829 A1 WO 2022163829A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- demand
- time
- vehicle
- control device
- power
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L55/00—Arrangements for supplying energy stored within a vehicle to a power network, i.e. vehicle-to-grid [V2G] arrangements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/60—Monitoring or controlling charging stations
- B60L53/68—Off-site monitoring or control, e.g. remote control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/50—Charging stations characterised by energy-storage or power-generation means
- B60L53/51—Photovoltaic means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/50—Charging stations characterised by energy-storage or power-generation means
- B60L53/53—Batteries
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/60—Monitoring or controlling charging stations
- B60L53/62—Monitoring or controlling charging stations in response to charging parameters, e.g. current, voltage or electrical charge
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/60—Monitoring or controlling charging stations
- B60L53/63—Monitoring or controlling charging stations in response to network capacity
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/60—Monitoring or controlling charging stations
- B60L53/65—Monitoring or controlling charging stations involving identification of vehicles or their battery types
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/60—Monitoring or controlling charging stations
- B60L53/66—Data transfer between charging stations and vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/60—Monitoring or controlling charging stations
- B60L53/67—Controlling two or more charging stations
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/06—Resources, workflows, human or project management; Enterprise or organisation planning; Enterprise or organisation modelling
- G06Q10/063—Operations research, analysis or management
- G06Q10/0631—Resource planning, allocation, distributing or scheduling for enterprises or organisations
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/06—Resources, workflows, human or project management; Enterprise or organisation planning; Enterprise or organisation modelling
- G06Q10/063—Operations research, analysis or management
- G06Q10/0637—Strategic management or analysis, e.g. setting a goal or target of an organisation; Planning actions based on goals; Analysis or evaluation of effectiveness of goals
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q30/00—Commerce
- G06Q30/02—Marketing; Price estimation or determination; Fundraising
- G06Q30/0201—Market modelling; Market analysis; Collecting market data
- G06Q30/0202—Market predictions or forecasting for commercial activities
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q50/00—Information and communication technology [ICT] specially adapted for implementation of business processes of specific business sectors, e.g. utilities or tourism
- G06Q50/06—Energy or water supply
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q50/00—Information and communication technology [ICT] specially adapted for implementation of business processes of specific business sectors, e.g. utilities or tourism
- G06Q50/40—Business processes related to the transportation industry
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16Y—INFORMATION AND COMMUNICATION TECHNOLOGY SPECIALLY ADAPTED FOR THE INTERNET OF THINGS [IoT]
- G16Y10/00—Economic sectors
- G16Y10/40—Transportation
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16Y—INFORMATION AND COMMUNICATION TECHNOLOGY SPECIALLY ADAPTED FOR THE INTERNET OF THINGS [IoT]
- G16Y20/00—Information sensed or collected by the things
- G16Y20/30—Information sensed or collected by the things relating to resources, e.g. consumed power
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/60—Navigation input
- B60L2240/62—Vehicle position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/60—Navigation input
- B60L2240/62—Vehicle position
- B60L2240/622—Vehicle position by satellite navigation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/60—Navigation input
- B60L2240/66—Ambient conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/70—Interactions with external data bases, e.g. traffic centres
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/70—Interactions with external data bases, e.g. traffic centres
- B60L2240/72—Charging station selection relying on external data
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/80—Time limits
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/40—Control modes
- B60L2260/50—Control modes by future state prediction
- B60L2260/54—Energy consumption estimation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/40—Control modes
- B60L2260/50—Control modes by future state prediction
- B60L2260/58—Departure time prediction
Definitions
- the present invention relates to an integrated control device, control method, server, program, and storage medium.
- a V2G system includes a parent aggregator that manages the buying and selling of power from a plurality of power supply sources to a power grid, and a plurality of transportation equipment that manages each of the plurality of transportation equipment. and a child aggregator that guarantees charge/discharge between at least one of the power grid and the parent aggregator.
- the integrated control device includes (I) a first demand, including a demand amount, a demand time, and a demand position related to energy demand, sent from an energy control device that controls energy, and (II) a mobile body control device that controls a mobile body. and a second demand including demand amount, demand time, and demand position related to the demand of the mobile unit, which is sent from the mobile unit. Based on the first demand and the second demand obtained by the obtaining unit, the integrated control device determines the position and time of movement of the moving body, or satisfies both the first demand and the second demand. a processing unit that performs at least one of processing for determining whether or not the processing can be performed;
- the processing unit provides first supply information that the mobile body can further supply beyond the demand amount included in the first demand, and second supply information that the mobile body can further supply beyond the demand amount indicated by the second demand.
- first supply information that the mobile body can further supply beyond the demand amount included in the first demand
- second supply information that the mobile body can further supply beyond the demand amount indicated by the second demand.
- the location and time for the moving body to move may be re-determined.
- the processing unit determines that both the first demand and the second demand cannot be satisfied, the processing unit gives priority to one of the first demand and the second demand over the other, and determines the position and You can decide the time.
- the processing unit determines that both the first demand and the second demand cannot be satisfied, the processing unit satisfies at least the second demand and selects a predetermined demand position among a plurality of demand positions included in the first demand.
- the location and time for the moving body to move may be determined so as to satisfy at least the demand amount and the demand time at some demand locations.
- the processing unit determines the position and time of movement of the mobile body based on the first demand, and determines whether the second demand is satisfied based on the position and time of movement of the mobile body determined based on the first demand. you can
- the processing unit moves the moving body every time a predetermined condition is satisfied.
- the position and time to move may be redetermined.
- the processing unit may redetermine the position and time for the mobile body to move each time the mobile body arrives at the demand position.
- the processing unit may redetermine the position and time for the moving body to move each time the moving body leaves the demand position.
- a server receives (I) a first demand, including a demand amount, a demand time, and a demand location for the energy demand, sent from the energy control device; and a second demand including demand quantity, demand time, and demand location for the demand. Based on the first demand and the second demand obtained by the obtaining unit, the server determines the position and time of movement of the mobile object, or can satisfy both the first demand and the second demand.
- a processing unit that performs at least one of processing for determining whether or not it is possible is provided.
- a control method comprises obtaining a first demand including demand quantity, demand time and demand location for the energy demand.
- the control method comprises obtaining a second demand including demand quantity, demand time and demand location for the mobile demand.
- the control method determines, based on the first demand and the second demand, a process of determining the position and time for the moving body to move, or determining whether both the first demand and the second demand can be satisfied.
- a program in a fourth aspect, causes the computer to function as the integrated control device.
- a storage medium stores the above program.
- the storage medium may be a non-transitory computer-readable storage medium.
- FIG. 1 schematically shows a control system 100 according to a first embodiment;
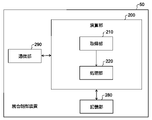
- the system configuration of integrated control device 50 is schematically shown.
- 1 shows an overview of the overall execution sequence of a system including control system 100;
- An execution sequence of processes executed by the integrated control device 50, the power control devices 40 to 44, the vehicle control device 60, and the vehicle 110 is shown.
- An example of the data structure of delivery information managed by the processing unit 220 is shown.
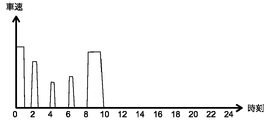
- Schematically shows changes in vehicle speed of a vehicle 110 that are predicted to depart from the base 10 and return to the base 10 via stores 11 to 14.
- FIG. 4 is a graph schematically showing predicted values of changes over time in power consumption, power generation, and remaining amount of stationary batteries for the next day at each base 10 and stores 11 to 14.
- FIG. 4 schematically shows control of the vehicle 110 based on operation information and power transfer information.
- FIG. 5 is a flowchart showing details of processing from S306 to S310 in FIG. 4;
- FIG. 4 is a flow chart showing a process executed on the day when the vehicle 110 leaves the base 10.
- FIG. 4 is a flowchart showing a process executed when vehicle 110 arrives at stores 11-14.
- FIG. 11 is a schematic diagram for explaining processing of a processing unit 220 in the second embodiment;
- FIG. 11 is a schematic diagram for explaining processing of a processing unit 220 in a control system 1200 according to a third embodiment;
- FIG. An example computer 2000 is shown.
- FIG. 1 schematically shows a control system 100 according to the first embodiment.
- the control system 100 includes a power control device 40 , a power control device 41 , a power control device 42 , a power control device 43 , a power control device 44 , a vehicle control device 60 and an integrated control device 50 .
- the vehicle 110a, the vehicle 110b, and the vehicle 110c are vehicles provided with a driving battery that stores driving power for driving.
- Vehicle 110a, vehicle 110b, and vehicle 110c are, for example, electric vehicles.
- Vehicles 110 a , 110 b , and 110 c are delivery vehicles that are capable of transporting items to store 11 , store 12 , store 13 , and store 14 .
- Store 11, store 12, store 13, and store 14 are, for example, stores such as convenience stores.
- the vehicle 110a, the vehicle 110b, and the vehicle 110c may be collectively called the "vehicle 110."
- Vehicle 110 is provided so as to be able to communicate with vehicle control device 60 through a mobile communication network or the like.
- the base 10 is, for example, a place of business for managing the delivery of goods to stores 11, 12, 13, and 14.
- the base 10 functions as a base for parking the vehicle 110 .
- the base 10 and the stores 11 to 14 can exchange electric power with a running battery included in the vehicle 110 . That is, vehicle 110 can be used for energy management at base 10 and stores 11-14.
- the integrated control device 50 and the vehicle control device 60 are managed at the site 10, for example. Integrated control device 50 and vehicle control device 60 are provided so as to be able to communicate with each other via a communication line.
- the integrated control device 50 and the vehicle control device 60 may be provided outside the base 10 .
- the integrated control device 50 and the vehicle control device 60 may be provided so as to be able to communicate through a communication line such as the Internet.
- One or both of the integrated control device 50 and the vehicle control device 60 may be realized by a server such as a cloud server.
- the site 10 includes a power generation device 20, a stationary battery 30, and a power control device 40.
- the power generation device 20 is, for example, a power generation device using renewable energy such as a solar power generation device.
- the stationary battery 30 is a battery provided at the site 10 .
- the power control device 40 controls charging and discharging of the stationary battery 30 according to the power generation amount of the power generation device 20 and the power demand so as to satisfy the power demand at the base 10 .
- the power control device 40 can communicate with the integrated control device 50 through a communication line such as the Internet.
- the store 11 includes a power generation device 21 , a stationary battery 31 and a power control device 41 .
- the power generation device 21 is, for example, a power generation device using renewable energy such as a solar power generation device.
- the stationary battery 31 is a battery provided in the store 11 .
- the power control device 41 controls charging and discharging of the stationary battery 31 according to the power generation amount of the power generation device 21 and the power demand so as to satisfy the power demand in the store 11 .
- the store 12 includes a power generation device 22 , a stationary battery 32 and a power control device 42 .
- the store 13 includes a power generation device 23 , a stationary battery 33 and a power control device 43 .
- the store 14 includes a power generation device 24 , a stationary battery 34 and a power control device 44 .
- the power generators 22 , 23 and 24 have the same functions as the power generator 21 .
- the stationary battery 32 , the stationary battery 33 , and the stationary battery 34 have the same functions as the stationary battery 31 .
- the power control device 42 , the power control device 43 and the power control device 44 have functions similar to those of the power control device 41 . Therefore, descriptions of the power generators, stationary batteries, and power control devices in the stores 12-14 are omitted.
- the vehicle 110 after leaving the base 10, the vehicle 110 is determined to return to the base 10 via the store 11, the store 12, and the store 13 in that order.
- the vehicle control device 60 acquires from the stores 11 to 14 delivery demand indicating items that each store desires to deliver on the next day, and transmits the delivery demand to the integrated control device 50 as delivery schedule information.
- the power control devices 40-44 predict the next day's power consumption and the amount of power generated by the power generation devices 20-24 at each base 10 and stores 11-14, and transmit them to the integrated control device 50 as power demand information.
- the integrated control device 50 determines the arrival and departure times of the vehicle 110 at each store 11-14 so as to satisfy the delivery demand indicated by the delivery schedule information and the power demand information at each base 10 and the stores 11-14.
- the stands 71-74 are charging stands installed outside the stores 11-14.
- the integrated control device 50 determines that it is necessary to supplementally charge the battery of the vehicle 110 at any one of the stands 71 to 74, the integrated control device 50 determines operation information via the station, and stores the determined operation information.
- the running battery may be charged at the stand according to .
- the base 10 also functions as a base for managing the delivery of parcels addressed to the residences 91 and 92 .
- the base 10 is a base for the home delivery vehicle 190a, the home delivery vehicle 190b, and the home delivery vehicle 190c.
- the home delivery vehicle 190 a , the home delivery vehicle 190 b , and the home delivery vehicle 190 c deliver home deliveries addressed to residences 91 and 92 .
- FIG. 2 schematically shows the system configuration of the integrated control device 50.
- the integrated control device 50 includes an arithmetic unit 200 , a storage unit 280 and a communication unit 290 .
- the calculation unit 200 includes an acquisition unit 210 and a processing unit 220 .
- the calculation unit 200 is realized by, for example, a calculation processing device including a processor.
- Storage unit 280 is implemented by including a non-volatile storage medium.
- the calculation unit 200 performs processing using information stored in the storage unit 280 .
- Communication unit 290 is responsible for communication between power control devices 40 - 44 , vehicle control device 60 and vehicle 110 .
- the calculation unit 200 communicates with the outside through the communication unit 290 .
- the acquisition unit 210 obtains (I) a first demand including a demand amount, a demand time, and a demand position related to energy demand sent from an energy control device that controls energy, and (II) a mobile body control device that controls a mobile body. and a second demand including demand quantity, demand time, and demand location for the mobile demand sent from.
- the processing unit 220 determines the position and time of movement of the moving body, or determines both the first demand and the second demand. At least one of the processes of determining whether the conditions can be satisfied is performed.
- the processing unit 220 provides first supply information that the moving body can further supply exceeding the demand amount included in the first demand, and second supply information that the moving body can further supply exceeding the demand amount indicated by the second demand. , and re-determine the position and time at which the moving object moves according to the first demand and the second demand newly acquired by the acquiring unit 210 .
- the processing unit 220 determines that both the first demand and the second demand cannot be satisfied, the processing unit 220 gives priority to one of the first demand and the second demand over the other, and determines the position to which the moving body moves. and time may be determined.
- the processing unit 220 determines that both the first demand and the second demand cannot be satisfied, the processing unit 220 satisfies at least the second demand and selects a plurality of demand positions included in the first demand in advance.
- the position and time during which the moving body moves may be determined so as to satisfy at least the demand amount and the demand time at some predetermined demand positions.
- the processing unit 220 determines the position and time of movement of the mobile body based on the first demand, and determines whether the second demand is satisfied based on the position and time of movement of the mobile body determined based on the first demand. You can
- the processing unit 220 moves the moving body every time a predetermined condition is satisfied. may redetermine the position and time to move.
- the processing unit 220 may redetermine the position and time for the moving body to move each time the moving body arrives at the demand position.
- the processing unit 220 may redetermine the location and time for the mobile to move each time the mobile departs from the demand location.
- FIG. 3 shows an overview of the overall execution sequence of the system including the control system 100.
- FIG. An overview of the system including the control system 100 will be described with reference to FIG.
- Systems that include control system 100 include EaaS systems that provide energy services, MaaS systems that provide mobility services, and eMaaS systems that coordinate energy mobility services.
- EaaS system is a system related to Energy as a Service.
- EaaS systems are provided as services related to the provision of various types of energy such as electric power, gas, and renewable energy.
- EaaS systems use information and communication technology to provide energy management as a service.
- a service related to electric energy is described as an example of "energy”, but “energy” is not limited to electric energy and can include any energy.
- the MaaS system is a system related to Mobility as a Service.
- the MaaS system utilizes information communication technology to provide transportation as a service using vehicles such as trucks, buses, taxis, and trains, and various means of transportation such as airplanes.
- "movement" is a service related to movement by vehicle for delivering goods. can include
- the eMaaS system provides a service that fuses EaaS and MaaS.
- eMaaS systems provide integrated services that optimize mobility and energy.
- the eMaaS system mediates between the EaaS system and the MaaS system and optimizes the entire system including the energy service provided by the EaaS system and the mobility service provided by the MaaS system to provide services. is. For example, by combining a vehicle allocation plan drawn up by a MaaS system and an energy plan by an EaaS system, we provide a service that minimizes power consumption and environmental load as a whole system.
- FIG. 3 represents the processing from drafting the next day's energy plan and vehicle allocation plan the day before to executing the plan according to the drafted plan.
- the processing of the EaaS system shown in FIG. 3 is processing executed at each of the base 10 and stores 11-14.
- an energy plan is formulated and executed through interaction between the energy management system and the user.
- the energy management system is implemented, for example, by power controllers 40-44.
- a "user" is a user, a system, etc. which manage an energy management system.
- the user sets constraints on the energy plan and notifies the energy management system.
- Constraints are conditions that restrict energy planning. Constraints may include constraints required to meet power demand. Constraints include, for example, information on the current state of power generation, the current state of power consumption, and power rates.
- the power generation amount is, for example, the power generation amount in the power generators 20-24.
- the power consumption is the power consumption at each of the base 10 and the stores 11-14.
- the power rate includes a power purchase price and a power selling price.
- the power purchase price is, for example, a condition relating to the amount charged to each of the base 10 and the stores 11 to 14 as compensation for receiving power from the grid.
- the power selling price is, for example, a condition relating to the amount of money that each of the base 10 and the stores 11 to 14 obtains as compensation for supplying power to the system.
- the energy management system draws up an energy plan for the next day.
- the energy plan includes the amount of power generation, the amount of stored electricity, and the power consumption for each hour of the day.
- the energy plan is, for example, the energy plan for the next day.
- the energy plan determines how much power is generated, how much power is consumed, and how much the stationary battery is charged or discharged in each time zone at each of the sites 10 and stores 11 to 14. determined.
- the amount of power generation for each time period on the next day may be predicted from environmental information such as weather information for the next day and past performance data.
- the energy plan may indicate in which time period power consumption is to be curbed (peak cut) at each of the base 10 and stores 11-14.
- the energy plan may indicate how much power is to be received from the outside at what time of day at each of the sites 10 and stores 11-14.
- the energy management system may formulate an optimal energy plan for each of the base 10 and stores 11-14.
- the energy management system may formulate an energy plan so that each of the base 10 and the stores 11 to 14 receives the least amount of power from the grid.
- the energy management system may formulate an energy plan so that the amount of money charged as consideration for receiving power from the grid at each of the base 10 and the stores 11 to 14 is minimized.
- the energy management system may formulate an energy plan so that the amount of money obtained as consideration for supplying power to the grid at each of the base 10 and stores 11-14 is maximized.
- the energy management system draws up an optimal energy plan as the next day's energy plan based on the constraints.
- An energy plan determines the amount of power that needs to be received from the outside for each time period of the next day. As will be described later, the amount of electric power that needs to be received from the outside can be supplied from a running battery included in vehicle 110 .
- the energy management system sends the energy plan to the dispatch system of the eMaaS system.
- the dispatch system is a system that manages dispatch of vehicles 110 .
- the dispatch system is specifically provided by the vehicle control device 60 .
- a "user" in the MaaS system is a user of the dispatch system.
- a "user” is a person or system that inputs delivery demand data at a delivery company.
- the user inputs constraints on vehicle allocation.
- Vehicle dispatch constraints may include constraints required to meet delivery demand.
- Constraints for vehicle allocation are conditions that restrict the creation of a vehicle allocation plan.
- Constraints for dispatching include, for example, origin and destination of delivery, departure and arrival times, types of items as cargo, volume of items, weight of items, and the like.
- the delivery source and delivery destination determine from which location to which location the vehicle needs to be operated.
- the departure time may be the time of departure from the base 10
- the return time may be the time of arrival at the base 10 .
- the departure time and return time may be set with a time span that allows for changes.
- the type, volume, and weight of the items determine which vehicles can deliver those items.
- the dispatch system draws up a delivery plan for the next day based on the constraints notified by the user. For example, the vehicle dispatch system can determine the number of vehicles 110 used for delivery, the departure and arrival times of the base 10 and the stores 11 to 14, the vehicle The travel route of the vehicle 110, the travel speed of the vehicle 110, and the station at which supplementary charging should be performed among the stations 71 to 74 are determined. The dispatch system sends the dispatch plan to the eMaaS system.
- the eMaaS system is a system that includes an arbitration system.
- the arbitration system is a system provided by the integrated control device 50, for example.
- the arbitration system receives the energy plan sent from the energy management system and the vehicle dispatch plan sent from the vehicle dispatch system.
- the arbitration system arbitrates between the energy plan and the vehicle allocation plan. For example, the arbitration system determines whether the energy plan is met when the vehicle is dispatched according to the vehicle allocation plan. For example, the dispatch plan determines the period during which the vehicle 110 is expected to be present at the base 10 and the stores 11-14. While the vehicle 110 is present at the site 10 and the stores 11 to 14, the arbitration system receives the electric power that the stores 11 to 14 need to be supplied from the outside from the running battery of the vehicle 110 during the necessary time period. If it can, it determines that it meets the energy plan.
- the arbitration system distributes the electric power that each store 11 to 14 needs to release to the outside at the stores 11 to 14 to which the vehicle 110 moves, to the driving battery provided in the vehicle 110 during the time period when the store needs to release the power. If it can supply, it determines that it meets the energy plan.
- the arbitration system determines how the energy plan can be revised to meet the vehicle allocation plan. For example, the arbitration system determines how much power consumption should be changed for each time period with respect to the energy plan in each of the base 10 and stores 11-14. In addition, the arbitration system determines how much the amount of power to be received from the grid should be changed in each time zone at each of the base 10 and stores 11-14. The arbitration system determines how much the amount of power to be released to the grid should be changed in each time zone at each of the base 10 and stores 11 to 14 .
- the arbitration system determines how the vehicle allocation plan can be modified to meet the energy plan. For example, the arbitration system determines how much the departure time and return time should be changed from the vehicle allocation plan received from the vehicle allocation system in each of the base 10 and stores 11 to 14 . The arbitration system also determines how to modify the travel route of the vehicle 110 with respect to the vehicle allocation plan. The arbitration system also determines how much the number of vehicles 110 to be used for delivery should be corrected for the vehicle allocation plan. Further, the arbitration system determines which of the stands 71 to 74 and at what time the base 10 should be supplemented with the vehicle allocation plan. Also, the arbitration system determines how much the traveling speed of the vehicle 110 should be corrected with respect to the dispatch plan.
- the arbitration system determines that the energy plan cannot be satisfied when the vehicle is dispatched according to the vehicle allocation plan, how can both the energy plan and the vehicle allocation plan be modified to satisfy the modified vehicle allocation plan and the energy plan? determine if it is possible.
- the arbitration system determines the power consumption in each time slot, the amount of power received from the grid in each time slot, and the amount of power emitted to the grid in each time slot in each of the base 10 and stores 11 to 14. and determine how to modify the departure time, return time, travel route, travel speed, number of vehicles 110 used for delivery, and stations for supplementary charging.
- the arbitration system sends an arbitration proposal including modifications to the energy plan and vehicle dispatch plan to the energy management system and the arbitration system.
- the energy management system receives the arbitration proposal from the arbitration system, in S3014, the energy management system reflects the arbitration proposal received from the arbitration system in the energy plan drawn up in S3012.
- the energy management system includes power consumption in each time zone at each of the base 10 and stores 11 to 14, power received from the grid in each time zone, and power emitted to the grid in each time zone. The amount, etc. will be revised according to the arbitration proposal.
- the energy management system judges that energy management can be realized at the base 10 and the stores 11 to 14 according to the arbitration proposal, it transmits an energy plan reflecting the arbitration proposal to the arbitration system as a reflection result.
- the vehicle dispatch plan formulated in S3212 reflects the arbitration proposal received from the arbitration system.
- the dispatch system modifies the departure time, return time, travel route, travel speed, number of vehicles 110 used for delivery, stations for supplementary charging, and the like in the dispatch plan according to the arbitration proposal.
- the vehicle allocation system determines that the demand for delivery is satisfied according to the arbitration proposal, the vehicle allocation plan reflecting the arbitration proposal is transmitted to the arbitration system as a reflection result.
- the arbitration system upon receiving reflection results of the arbitration proposal from the energy management system and the vehicle dispatch system, the arbitration system confirms that the energy plan and vehicle dispatch plan reflecting the arbitration proposal satisfy the delivery demand and the power demand. After confirming that the vehicle allocation demand and the power demand are satisfied, the EaaS system transmits to the EaaS system and the vehicle allocation system as an arbitration result that the plan will be executed in accordance with the reflected result of the arbitration proposal. The arbitration system may further revise the energy plan and vehicle allocation plan if the energy plan and vehicle allocation plan reflecting the arbitration proposal do not meet the delivery demand and power demand, and transmit the result as the arbitration result.
- the EaaS system, dispatch system and EaaS system may repeat the processes of S3112, S3014, S3214, S3114 until the delivery demand and power demand are met.
- the energy management system determines the energy plan in S3014 and notifies the user of the determined energy plan.
- the user performs energy management according to the notified energy plan.
- the user performs performance processing related to execution of the energy plan. For example, the user performs a process of collecting and inputting actual data of energy management including actual data of charge/discharge amount of the stationary battery, actual data of generated power, and actual data of power consumption in each time period.
- the energy management system manages performance data input by each user as history information. Note that the energy management system may use history information managed by the energy management system when drawing up an energy plan later.
- the vehicle allocation system receives the arbitration result from the arbitration system, in S3214, it confirms the vehicle allocation plan and notifies the user of the confirmed vehicle allocation plan.
- the user executes the plan according to the notified dispatch plan.
- the user performs performance processing related to execution of the vehicle allocation plan. For example, the user collects and inputs travel performance data including travel data of each vehicle 110 and the remaining capacity of the travel battery.
- the dispatch system manages the travel performance data input by the user as history information. Note that the vehicle allocation system may use history information managed by the vehicle allocation system when planning a vehicle allocation plan later.
- FIG. 4 shows an execution sequence of processes executed by the integrated control device 50, the power control devices 40 to 44, the vehicle control device 60, and the vehicle 110.
- the power control devices 40-44 transmit the power demand information to the integrated control device 50.
- the power control device 40 predicts the power generated by the power generation device 21 on the next day and the power consumption at the site 10 on the next day.
- the power control device 40 stores history information in which past power generation by the power generation device 21 and past power consumption at the site 10 are associated with weather information.
- the power control device 40 predicts the power generated by the power generation device 21 for the next day and the power consumption for the next day based on the weather forecast information for the next day and the history information.
- the power control device 40 obtains, from the history information, information associated with the weather information that matches the weather information indicated by the weather forecast information for the next day, thereby obtaining the power generated by the power generation device 21 for the next day, Predict power consumption for the next day.
- the power control devices 41 to 45 predict the next day's power generation and power consumption at each store.
- the power control devices 40 to 45 transmit to the integrated control device 50 power demand information including information indicating their predicted power generation and power consumption for the next day.
- the vehicle control device 60 transmits to the integrated control device 50 the delivery schedule information of the items to the stores 11 to 14 on the next day. For example, the vehicle control device 60 stills the delivery information based on the next day's product delivery request acquired from each of the stores 11-14. Specifically, the vehicle control device 60 acquires, as a delivery request, information on an article to be delivered the next day and information for identifying the delivery destination store.
- the item information includes the quantity of items to be delivered to each store, information on the weight of each item, delivery time information indicating the time at which the store desires delivery, and the like.
- the vehicle control device 60 also manages vehicle information including the number of vehicles 110 and the current remaining capacity of the running battery provided in the vehicle 110 .
- the vehicle control device 60 transmits delivery information including delivery schedule information for the next day and vehicle information to the integrated control device 50 .
- the processing unit 220 performs processing related to operation control of the vehicle 110 and control of the power control devices 41 to 44 based on the delivery information and the power demand information. For example, the processing unit 220 generates operation information including the position and time when the vehicle 110 moves between the shops 11 to 14 and the travel route of the vehicle 110 . Further, the processing unit 220 generates information on the transfer of electric power between the driving battery of the vehicle 110 and the base 10 and the shops 11 to 14 at the base 10 and the shops 11 to 14 . The power transfer information includes, for example, the time for power transfer and the power transfer amount. The processing of S306 will be described later. In S308, the processing unit 220 transmits power transfer information to the power control devices 40-44.
- the processing unit 220 causes the power control devices 40 to 44 of the base 10 and the stores 11 to 14 determined not to transfer power to perform control based on the power demand information generated by the power control devices 40 to 44, respectively. to send consent information indicating that the At S ⁇ b>310 , the processing unit 220 transmits operation information to the vehicle control device 60 .
- the power control devices 40-44 start power control at the respective bases 10 and stores 11-14.
- the vehicle control device 60 starts operation control of the vehicle 110 according to the operation information. For example, the vehicle control device 60 instructs the driver of the vehicle 110 at the base 10 so that the vehicle 110 departs from the base 10 according to the operation information.
- processing unit 220 determines that the vehicle 110 has arrived at the store 11 from the position information based on the GPS signal transmitted from the vehicle 110.
- processing unit 220 communicates with vehicle 110 to receive the remaining amount of the running battery of vehicle 110 .
- the processing unit 220 corrects the operation information of the vehicle 110 and the power transfer information at the base 10 and the stores 11 to 14 based on the currently predicted weather forecast information and the remaining battery amount information of the vehicle 110. do. Specific processing of S330 will be described later.
- processing unit 220 transmits the corrected power transfer information to power control devices 40-44.
- the processing unit 220 transmits the operation information to the vehicle control device 60 . It should be noted that the vehicle 110 repeats the same processing as the processing from S320 to S334 each time it arrives at the shops 11-14. This makes it possible to update the power transfer information and operation information based on the latest information.
- FIG. 5 shows an example of the data structure of delivery information managed by the processing unit 220.
- the delivery information is generated based on the delivery schedule information transmitted from each store 11-14.
- the delivery information includes location, store name, item, and time.
- “Location” is information indicating the geographical location of each store. “Location” may include, for example, address, latitude and longitude information.
- "Store name” is information indicating the name of the store.
- “Item” is item information indicating the item to be delivered to each store.
- the product information includes information indicating the number of each product to be delivered to the stores 11-14.
- “Time” is information indicating the time at which each store 11 to 14 wishes to deliver the product.
- the processing unit 220 determines operation information of the vehicle 110 so that the goods can be delivered by the time desired by each store 11-14.
- FIG. 6 schematically shows changes in the vehicle speed of the vehicle 110 from the departure from the base 10 to the return to the base 10 via the shops 11-14.
- the person leaves the base 10 at 0:00 arrives at the store 11 at 1:00, leaves the store 11 at 2:00, arrives at the store 12 at 2:30, leaves the store 12 at 4:00, and arrives at the store 12 at 4:00.
- the processing unit 220 refers to the delivery information to satisfy the delivery schedule information and to minimize the power consumption required for the vehicle 110 to travel on the next day. 11 to 14, the travel route and vehicle speed of the vehicle 110 are determined. As an example, the processing unit 220 determines a travel route and a travel route so that the power consumption required for travel of the vehicle 110 is minimized based on road congestion information, road gradient information, traffic signal information, etc. predicted for the next day. The speed of the vehicle while traveling the route may be determined. When the processing unit 220 transmits the operation information including the travel route and the vehicle speed information to the vehicle control device 60, the vehicle control device 60 causes the vehicle 110 to travel according to the travel route and the vehicle speed information through the navigation device provided in the vehicle 110. The driver of vehicle 110 is instructed.
- FIG. 7 is a graph schematically showing predicted values of changes over time in power consumption, power generation, and the remaining amount of stationary batteries for the next day at each base 10 and stores 11-14.
- the horizontal axis of each graph in FIG. 7 represents time in a day.
- a line 610 in FIG. 7 shows an example of temporal changes in power consumption predicted at the base 10 and the stores 11-14.
- a line 620 in FIG. 7 shows an example of the predicted change in the power generated by the power generators 20 to 24 over time.
- the power control devices 40 to 44 may predict the power consumption and power generation for the next day, for example, based on the correlation between past weather and power consumption and the weather forecast information for the next day.
- the power control devices 40 to 44 charge the stationary batteries 30 to 34 with surplus power when the generated power exceeds the consumed power, and charge the stationary batteries 30 to 34 when the consumed power exceeds the generated power. At least part of the power consumption is covered by discharging .about.34. As a result, the power control devices 40 to 44 perform control to peak-shift the power consumption.
- a threshold as a lower limit value of the remaining battery level is set in advance for the stationary batteries 30 to 34 .
- the power control devices 40-44 limit discharge of the stationary batteries 30-34 so that the remaining battery capacity does not fall below a preset threshold.
- a line 630 in FIG. 7 indicates a change in the remaining battery capacity assuming that the stationary batteries 30 to 34 are discharged according to the power consumption when the power consumption exceeds the generated power. As shown by line 630 in FIG. 7, the remaining battery capacity reaches the threshold at 7:00 and reaches its lowest value at 9:45. Therefore, when the power consumption, generated power, and remaining battery capacity are predicted as shown in FIG. , the power consumption can be covered by the discharge of the stationary battery and the generated power. Therefore, when the power consumption, power generation, and remaining battery capacity are predicted as shown in FIG. do.
- FIG. 8 schematically shows control of the vehicle 110 based on operation information and power transfer information.
- the processing unit 220 generates operation information including the departure time of the base 10, the arrival and departure times of the shops 11 to 14, the arrival time to the base 10, and the vehicle speed of the vehicle 110 between the base 10 and the shops 11 to 14. . Further, when supplementary charging of the running battery is performed at the stations 71 to 74, operation information including the arrival time and departure time at the station where supplementary charging is performed is generated. In addition, the processing unit 220 generates power transfer information including the time and power amount for transferring power between the base 10 and the stores 11 to 14 .
- the processing unit 220 discharges the running battery of the vehicle 110 while the goods to be delivered to the store 11 are being unloaded from the vehicle 110. Operation information is determined so that the required amount of power can be supplied to the store 11 by 7:00.
- the processing unit 220 determines operation information so that the running battery of the vehicle 110 can be discharged and supplied to the store 13 . Further, when it is predicted that there will be a surplus of electric power at the store 14, after arriving at the store 14, while the goods to be delivered to the store 14 are being unloaded from the vehicle 110, the processing unit 220 The electric power supplied from the power generation device 24 or the stationary battery 34 supplementally charges the running battery.
- FIG. 9 is a flowchart showing the details of the processing from S306 to S310 in FIG.
- the processing of the flowchart of FIG. 9 is executed on the day before the vehicle 110 leaves the base 10 .
- the processing of the flowchart of FIG. 9 may be executed between 23:00 and 0:00 on the day before the vehicle 110 leaves the base 10 .
- the processing unit 220 refers to the delivery information, and controls the vehicle 110 to meet the desired delivery time of each of the stores 11 to 14 and to minimize the amount of power required for the vehicle 110 to run. Operation information including the route and vehicle speed, the departure time from the base 10, the arrival time at each of the shops 11 to 14 and the departure time from each shop, and the arrival time at the base 10 is determined. At this time, the processing unit 220 determines operation information based on infrastructure information including traffic congestion forecast information so that the amount of power required for running the vehicle 110 is minimized.
- the processing unit 220 determines the charging stations and stores for supplementary charging of the running battery, the supplementary electric energy, and The store where the running battery is to be discharged and the amount of electric power to be discharged are determined. For example, based on the operation information, the times at which the vehicle 110 is expected to stop at each of the stores 11 to 14 are determined. Further, from the power demand information, it is determined whether there will be a surplus of power or a shortage of power during the time when the vehicle 110 is expected to stop at each of the shops 11 to 14 .
- the processing unit 220 is configured so that when the vehicle 110 is stopped at each of the shops 11 to 14 during the time when the vehicle 110 is expected to stop at each of the shops 11 to 14, the electric power becomes surplus. , it is determined that supplementary charging is possible while the vehicle is stopped at the store 11-14. Further, the processing unit 220, based on the travel route of the vehicle 110 and the positions at which the stands 71 to 74 are installed, when the stands 71 to 74 are installed within a predetermined distance from the travel route, It is determined that supplementary charging is possible at the stands 71-74. Further, when there is a shortage of electric power at each of the stores 11-14, the processing unit 220 determines that the running battery can be discharged while the vehicle 110 is stopped at the stores 11-14.
- the stations 71 to 74 and shops 11 to 14 for supplementary charging and the shops 11 to 14 for discharging are reflected in the operation information.
- the processing unit 220 predicts the remaining amount of the running battery of the vehicle 110 when the vehicle 110 returns to the base 10 according to the operation information.
- the processing unit 220 notifies the power control device 40 of the base 10 of the remaining battery capacity predicted in S850.
- the processing unit 220 transmits information on power exchange with the running battery of the vehicle 110 to the power control devices 41-44 of the stores 11-14.
- the processing unit 220 transmits operation information to the vehicle control device 60 .
- FIG. 10 is a flowchart showing the process executed on the day when the vehicle 110 leaves the base 10.
- the processing unit 220 generates operation information including the travel route and vehicle speed of the vehicle 110 based on the latest weather forecast information and infrastructure information at a predetermined time before the departure time of the vehicle 110 from the base 10. , corrects the amount of electric power required for running the vehicle 110 .
- the processing unit 220 corrects the station and store where the running battery is supplemented and the supplementary power amount, as well as the store where the running battery is discharged and the discharge power amount, based on the information corrected in S910.
- the processing unit 220 reflects the stations 71 to 74 and stores 11 to 14 for supplementary charging and the stores 11 to 14 for discharging to the operation information based on the information corrected at S920.
- the processing unit 220 based on the information corrected in S920, the processing unit 220 considers the stations 71 to 74 and stores 11 to 14 for supplementary charging, and the stores 11 to 14 for discharging, and the operation of the vehicle 110 is established. make sure that
- the processing unit 220 predicts the remaining amount of the running battery of the vehicle 110 when the vehicle 110 returns to the base 10 according to the corrected operation information.
- the processing unit 220 notifies the power control device 40 of the base 10 of the remaining battery capacity predicted in S950.
- the processing unit 220 transmits information on power exchange with the running battery of the vehicle 110 to the power control devices 41-44 of the shops 11-14.
- the processing unit 220 transmits operation information to the vehicle control device 60 .
- FIG. 11 is a flow chart showing the process executed when the vehicle 110 arrives at the stores 11-14.
- the processing of the flowchart of FIG. 11 can be applied to the processing from S330 to S334 of FIG.
- the processing unit 220 determines that the vehicle 110 has arrived at the store 11 based on the current position information of the vehicle 110 received from the vehicle 110, in S1010, the latest weather forecast information, infrastructure information, and remaining amount of the running battery of the vehicle 110 are displayed.
- operation information including the travel route and vehicle speed of the vehicle 110 after leaving the store 11 and the amount of electric power required for the vehicle 110 to travel are recalculated.
- the processing unit 220 re-determines the station and store where the driving battery is to be supplemented and the supplementary power amount, as well as the store and the discharging power amount at which the driving battery is to be discharged, based on the information recalculated at S1010. do.
- the processing unit 220 reflects the stations 71 to 74 and stores 12 to 14 for supplementary charging and the stores 12 to 14 for discharging to the operation information based on the information determined at S1020.
- the processing unit 220 based on the information determined in S1020, the processing unit 220 considers the stations 71 to 74 and stores 12 to 14 for supplementary charging, and the stores 12 to 14 for discharging, and the operation of the vehicle 110 is established. make sure that In S1050, the processing unit 220 re-predicts the remaining amount of the running battery of the vehicle 110 when the vehicle 110 returns to the base 10 according to the determined operation information.
- the processing unit 220 notifies the power control device 40 of the site 10 of the remaining battery capacity predicted in S1050.
- processing unit 220 transmits information on the transfer of electric power with the running battery of vehicle 110 to power control devices 42-44 of shops 12-14. At S ⁇ b>1080 , the processing unit 220 transmits operation information to the vehicle control device 60 .
- a process similar to the process described with reference to FIG. 11 is executed each time the vehicle 110 arrives at the store 12, the store 13, and the store 14. As a result, it is possible to update the operation information of the vehicle 110 and the electric power transfer information based on the latest information.
- the processing unit 220 may execute processing similar to the processing described in relation to S303 of FIG. 4 and FIG. 11 when the vehicle 110 leaves the stores 11-14. For example, when the ignition switch of the vehicle 110 is turned on after the vehicle 110 arrives at the store 11, the processing unit 220 executes the same processing as the processing described in relation to S303 of FIG. 4 and FIG. you can
- FIG. 12 is a schematic diagram for explaining the processing of the processing unit 220 in the second embodiment.
- the first embodiment is an embodiment in which it is determined that one vehicle 110 operates in the order of the store 11, the store 12, the store 13, and the store 14.
- FIG. in contrast, the second embodiment allows two vehicles 110 to operate at the same time when it is determined that the vehicles 110 operate in the order of the store 11, the store 12, the store 13, and the store 14. It is an embodiment in the case of doing.
- the processing unit 220 determines operation information and electric power consumption information for the vehicle 110a to return to the base 10 via the stores 11 and 12 after the vehicle 110a departs from the base 10. Determine the transfer information. Further, after the vehicle 110a leaves the base 10 and before the vehicle 110a returns to the base 10, the processing unit 220 determines whether the vehicle 110b departs from the base 10 and stores the store based on the delivery information and the power demand information. 13 and stores 14 to return to the base 10 and information on the transfer of electric power. In addition, in the second embodiment, the processing unit 220 operates in the order of the base 10, the store 11, the store 12, the store 13, the store 14, and the base 10 in the first embodiment. Assuming that it is determined to operate in the order of base 10, store 11, store 12, and base 10, and to operate in the order of base 10, store 13, store 14, and base 10, each independent Then, a process of determining operation information and power transfer information may be performed.
- the processing unit 220 After returning, leaving the base 10, arriving at the store 12, and after leaving the store 12, returning to the base 10 without going through the other stores 13-14, operation information and electric power transfer information may be generated. .
- the second embodiment may be an embodiment that is applied in a case where it is not possible to determine the delivery information, the operation information that satisfies the power demand, and the power transfer information by the processing described in relation to the first embodiment. . According to the second embodiment, it is possible to flexibly respond to delivery requests and power demand requests to each store 11-14.
- the processing unit 220 prioritizes power demand at each store 11 to 14 over delivery demand at each store 11 to 14, and determines operation information and power transfer information. may be adopted. For example, the processing unit 220 minimizes the amount of power required for the vehicle 110 to run and the amount of power received by each of the stores 11 to 14 from the grid. is determined, and when the delivery information can be satisfied by the operation information, the operation information and the power transfer information may be determined. In addition, when the delivery information cannot be satisfied by the operation information and the electric power transfer information, the processing unit 220 determines the amount of electric power for the vehicle 110 to run and the amount of electric power for each store 11 within a range that at least satisfies the delivery information.
- operation information and power transfer information may be determined so as to minimize the amount of power received by each of the stores 11 to 14 from the grid. If both the delivery information and the power demand cannot be met, the processing unit 220 satisfies the delivery information of the stores 11 to 14 and meets the power demand of a predetermined part of the stores 11 to 14. Operation information and power transfer information may be determined so as to satisfy Further, when both the delivery information and the power demand cannot be met, the processing unit 220 selects a predetermined portion of the stores 11 to 14 within a range that at least satisfies the power demand of the stores 11 to 14. Operation information and power transfer information may be determined so as to satisfy the store's delivery information.
- the processing unit 220 obtains the operation information and the power demand so as to at least satisfy the delivery demand and the power demand of some predetermined stores among the stores 11 to 14.
- Power transfer information may be determined.
- a predetermined portion of the stores 11 to 14 may be stores predetermined to be maintained in an emergency such as a power outage or an earthquake.
- FIG. 13 is a schematic diagram for explaining the processing of the processing unit 220 in the control system 1200 according to the third embodiment.
- the first embodiment is an embodiment in which it is determined that one vehicle 110 operates in the order of the store 11, the store 12, the store 13, and the store 14.
- FIG. 13 is an embodiment in which the order of passing through stores is not defined.
- a store 1211, a store 1212, a store 1213, a store 1214, and a stand 1271, a stand 1272, a stand 1273, and a stand 1274 are provided.
- the processing unit 220 after the vehicle 110a leaves the base 10, returns to the base 10 via the store 11, the store 12, the store 13, and the store 14 based on the delivery information and the power demand information. It determines the return operation information and power transfer information. Further, the processing unit 220 determines operation information and electric power transfer information for the vehicle 110b to return to the base 10 via the shops 1214, 1213, 1212, and 1211 after leaving the base 10.
- the processing unit 220 obtains information about the store 14 from the latest infrastructure information, the running battery information of the vehicle 110a, and the like. If it is determined that at least one of the delivery information and the power demand information cannot be satisfied, after the vehicle 110b leaves the store 1211, new operation information and power transfer information returning to the base 10 via the store 14 are provided. Generate.
- the processing unit 220 periodically acquires the remaining amount of the running battery of the vehicle 110b, and when it is possible to supply power exceeding the power demand of the stores 1214, 1213, 1212, and 1211, and the base 10, , new operation information and electric power transfer information returning to the base 10 via the store 14 may be generated. As a result, the possibility of satisfying the delivery information and power demand information for the store 14 can be increased.
- the driving battery provided in the vehicle 110 is used to meet the delivery demands at the stores 11 to 14 outside the base 10, and the base Energy management at 10 and energy management at stores 11-14 can be performed. As a result, optimal energy management can be performed at the base 10 and the stores 11 to 14 as a whole.
- the vehicle 110 is a vehicle as an example of transportation equipment.
- the vehicle has at least a battery.
- the vehicle may include an internal combustion engine that generates driving force for running.
- a vehicle may comprise an internal combustion engine that produces electrical power to charge a battery.
- the vehicle may be an automobile such as an electric vehicle or a fuel cell vehicle (FCV).
- Automobiles include buses, trucks, two-wheeled vehicles, and the like.
- the vehicle may be a straddle-type vehicle or the like, or may be a motorcycle.
- transportation equipment includes equipment such as aircraft including unmanned aircraft, ships, and the like.
- a transport device may be any device that transports people or goods.
- a transportation device is an example of a mobile object.
- the mobile object is not limited to transportation equipment, and may be any movable equipment.
- FIG. 14 illustrates an example computer 2000 in which embodiments of the invention may be implemented in whole or in part.
- the program installed in the computer 2000 causes the computer 2000 to function as a control system according to the embodiment, each part of the control system, or a device such as a control device, or each part of the device, the system, each part of the system, the device, or Operations associated with portions of the apparatus may be performed and/or a process or step of an embodiment may be performed.
- Such programs may be executed by CPU 2012 to cause computer 2000 to perform specific operations associated with some or all of the process steps and block diagram blocks described herein.
- a computer 2000 includes a CPU 2012 and a RAM 2014 which are interconnected by a host controller 2010 .
- Computer 2000 also includes ROM 2026 , flash memory 2024 , communication interface 2022 and input/output chip 2040 .
- ROM 2026 , flash memory 2024 , communication interface 2022 and input/output chip 2040 are connected to host controller 2010 via input/output controller 2020 .
- the CPU 2012 operates according to programs stored in the ROM 2026 and RAM 2014, thereby controlling each unit.
- a communication interface 2022 communicates with other electronic devices via a network.
- Flash memory 2024 stores programs and data used by CPU 2012 in computer 2000 .
- ROM 2026 stores programs such as boot programs that are executed by computer 2000 upon activation and/or programs that depend on the hardware of computer 2000 .
- Input/output chip 2040 also supports various input/output units such as keyboards, mice and monitors as input/output units such as serial ports, parallel ports, keyboard ports, mouse ports, monitor ports, USB ports, HDMI ports, etc. It may be connected to the input/output controller 2020 via an output port.
- the program is provided via a computer-readable storage medium such as a CD-ROM, DVD-ROM, or memory card or via a network.
- RAM 2014, ROM 2026, or flash memory 2024 are examples of computer-readable storage media.
- Programs are installed in flash memory 2024 , RAM 2014 , or ROM 2026 and executed by CPU 2012 .
- the information processing described within these programs is read by computer 2000 to provide coordination between the programs and the various types of hardware resources described above.
- An apparatus or method may be configured by implementing information operations or processing according to the use of computer 2000 .
- the CPU 2012 executes a communication program loaded in the RAM 2014 and sends communication processing to the communication interface 2022 based on the processing described in the communication program. you can command.
- the communication interface 2022 reads transmission data stored in a transmission buffer processing area provided in a recording medium such as the RAM 2014 and the flash memory 2024, transmits the read transmission data to the network, and receives the transmission data from the network.
- the received data is written in a receive buffer processing area or the like provided on the recording medium.
- the CPU 2012 also causes the RAM 2014 to read all or necessary portions of a file or database stored in a recording medium such as the flash memory 2024, and performs various types of processing on the data on the RAM 2014. good. CPU 2012 then writes back the processed data to the recording medium.
- a recording medium such as the flash memory 2024
- CPU 2012 performs various types of operations, information processing, conditional judgment, conditional branching, unconditional branching, information retrieval/ Various types of processing may be performed, including permutations, etc., and the results written back to RAM 2014 .
- the CPU 2012 may search for information in a file in a recording medium, a database, or the like. For example, if multiple entries each having an attribute value of a first attribute associated with an attribute value of a second attribute are stored in the recording medium, the CPU 2012 determines which attribute value of the first attribute is specified. search the plurality of entries for an entry that matches the condition, read the attribute value of the second attribute stored in the entry, and thereby determine the first attribute that satisfies the predetermined condition. An attribute value of the associated second attribute may be obtained.
- the programs or software modules described above may be stored in a computer-readable storage medium on or near the computer 2000 .
- a storage medium such as a hard disk or RAM provided in a server system connected to a dedicated communication network or the Internet can be used as a computer-readable storage medium.
- a program stored in a computer-readable storage medium may be provided to computer 2000 via a network.
- a program installed in the computer 2000 and causing the computer 2000 to function as the integrated control device 50 may act on the CPU 2012 and the like to cause the computer 2000 to function as each part of the integrated control device 50 .
- the information processing described in these programs is read by the computer 2000 and functions as each part of the integrated control device 50, which is concrete means in which the software and various hardware resources described above cooperate.
- a unique integrated control device 50 corresponding to the purpose of use is constructed.
- Each block in the block diagram may represent (1) a stage of a process in which an operation is performed or (2) a piece of equipment responsible for performing the operation.
- Certain steps and portions may be implemented by dedicated circuitry, programmable circuitry provided with computer readable instructions stored on a computer readable storage medium, and/or processor provided with computer readable instructions stored on a computer readable storage medium.
- Dedicated circuitry may include digital and/or analog hardware circuitry and may include integrated circuits (ICs) and/or discrete circuitry.
- Programmable circuits include logic AND, logic OR, logic XOR, logic NAND, logic NOR, and other logic operations, memory elements such as flip-flops, registers, field programmable gate arrays (FPGAs), programmable logic arrays (PLAs), etc. and the like.
- a computer-readable storage medium may comprise any tangible device capable of storing instructions to be executed by a suitable device such that a computer-readable storage medium having instructions stored thereon may be represented by a process procedure or block diagram. constitutes at least part of an article of manufacture that includes instructions executable to bring about means for performing the operations specified in .
- Examples of computer-readable storage media may include electronic storage media, magnetic storage media, optical storage media, electromagnetic storage media, semiconductor storage media, and the like.
- Computer readable storage media include floppy disks, diskettes, hard disks, random access memory (RAM), read only memory (ROM), erasable programmable read only memory (EPROM or flash memory) , electrically erasable programmable read only memory (EEPROM), static random access memory (SRAM), compact disc read only memory (CD-ROM), digital versatile disc (DVD), Blu-ray (RTM) disc, memory stick, An integrated circuit card or the like may be included.
- the computer readable instructions may be assembler instructions, Instruction Set Architecture (ISA) instructions, machine instructions, machine dependent instructions, microcode, firmware instructions, state configuration data, or instructions such as Smalltalk, JAVA, C++, etc. any source or object code written in any combination of one or more programming languages, including object-oriented programming languages, and conventional procedural programming languages such as the "C" programming language or similar programming languages; may include
- Computer readable instructions may be transmitted to a processor or programmable circuitry of a general purpose computer, special purpose computer, or other programmable data processing apparatus, either locally or over a wide area network (WAN), such as a local area network (LAN), the Internet, or the like. ) and may be executed to provide means for performing the operations specified in the process steps or block diagrams described.
- WAN wide area network
- LAN local area network
- processors include computer processors, processing units, microprocessors, digital signal processors, controllers, microcontrollers, and the like.
Landscapes
- Engineering & Computer Science (AREA)
- Business, Economics & Management (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Economics (AREA)
- Human Resources & Organizations (AREA)
- Strategic Management (AREA)
- General Business, Economics & Management (AREA)
- Development Economics (AREA)
- Theoretical Computer Science (AREA)
- Marketing (AREA)
- Entrepreneurship & Innovation (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Tourism & Hospitality (AREA)
- Accounting & Taxation (AREA)
- Finance (AREA)
- Primary Health Care (AREA)
- Game Theory and Decision Science (AREA)
- General Health & Medical Sciences (AREA)
- Educational Administration (AREA)
- Operations Research (AREA)
- Water Supply & Treatment (AREA)
- Public Health (AREA)
- Computing Systems (AREA)
- Quality & Reliability (AREA)
- Data Mining & Analysis (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Remote Monitoring And Control Of Power-Distribution Networks (AREA)
- Supply And Distribution Of Alternating Current (AREA)
- Charge And Discharge Circuits For Batteries Or The Like (AREA)
Abstract
Description
[先行技術文献]
[特許文献]
[特許文献1] 特開2018-124674号公報
11 店舗
12 店舗
13 店舗
14 店舗
20 発電装置
21 発電装置
22 発電装置
23 発電装置
24 発電装置
30 定置バッテリ
31 定置バッテリ
32 定置バッテリ
33 定置バッテリ
34 定置バッテリ
40 電力制御装置
41 電力制御装置
42 電力制御装置
43 電力制御装置
44 電力制御装置
50 統合制御装置
60 車両制御装置
71 スタンド
72 スタンド
74 スタンド
91、92 住宅
100 制御システム
110 車両
190 宅配車両
200 演算部
210 取得部
220 処理部
280 記憶部
290 通信部
1200 制御システム
1211 店舗
1212 店舗
1213 店舗
1214 店舗
1271 スタンド
1272 スタンド
1273 スタンド
1274 スタンド
2000 コンピュータ
2010 ホストコントローラ
2012 CPU
2014 RAM
2020 入力/出力コントローラ
2022 通信インタフェース
2024 フラッシュメモリ
2026 ROM
2040 入力/出力チップ
Claims (12)
- (I)エネルギを制御するエネルギ制御装置から送られる、エネルギ需要に関する需要量、需要時間、及び需要位置を含む第1需要と、(II)移動体を制御する移動体制御装置から送られる、前記移動体の需要に関する需要量、需要時間、及び需要位置を含む第2需要と、を取得する取得部と、
前記取得部が取得した前記第1需要及び前記第2需要に基づいて、前記移動体が移動する位置及び時間を決定する処理、又は、前記第1需要と前記第2需要との双方の需要を満たすことができるか判断する処理の少なくとも一方を行う処理部と、
を備える統合制御装置。 - 前記処理部は、前記移動体が前記第1需要が含む需要量を超えて更に供給可能な第1供給情報、及び、前記移動体が前記第2需要が示す需要量を超えて更に供給可能な第2供給情報を管理し、前記取得部が新たに取得した第1需要及び第2需要に応じて、前記移動体が移動する位置及び時間を再決定する
請求項1に記載の統合制御装置。 - 前記処理部は、前記第1需要と前記第2需要との双方の需要を満たすことはできないと判断した場合に、前記第1需要及び前記第2需要の一方を他方より優先して、前記移動体が移動する位置及び時間を決定する
請求項1又は2に記載の統合制御装置。 - 前記処理部は、前記第1需要と前記第2需要との双方の需要を満たすことはできないと判断した場合に、少なくとも前記第2需要を満たし、かつ、前記第1需要に含まれる複数の前記需要位置のうち予め定められた一部の需要位置における需要量及び需要時間を少なくとも満たすように、前記移動体が移動する位置及び時間を決定する
請求項3に記載の統合制御装置。 - 前記処理部は、前記第1需要に基づいて前記移動体が移動する位置及び時間を決定し、前記第1需要に基づいて決定した前記移動体が移動する位置及び時間に基づいて、前記第2需要を満たすか判断する
請求項1又は2に記載の統合制御装置。 - 前記処理部は、 前記第1需要及び前記第2需要に基づいて決定した前記移動体が移動する位置及び時間に基づいて前記移動体が移動を開始した後、予め定められた条件が満たされる毎に、前記移動体が移動する位置及び時間を再決定する
請求項1から5のいずれか一項に記載の統合制御装置。 - 前記処理部は、前記移動体が前記需要位置に到着する毎に、前記移動体が移動する位置及び時間を再決定する
請求項6に記載の統合制御装置。 - 前記処理部は、前記移動体が前記需要位置を出発する毎に、前記移動体が移動する位置及び時間を再決定する
請求項6に記載の統合制御装置。 - (I)エネルギ制御装置から送られる、エネルギ需要に関する需要量、需要時間、及び需要位置を含む第1需要と、(II)移動体を制御する移動体制御装置から送られる、前記移動体の需要に関する需要量、需要時間、及び需要位置を含む第2需要と、を取得する取得部と、
前記取得部が取得した前記第1需要及び前記第2需要に基づいて、前記移動体が移動する位置及び時間を決定する処理、又は、前記第1需要と前記第2需要との双方の需要を満たすことができるか判断する処理の少なくとも一方を行う処理部と、
を備えるサーバ。 - エネルギ需要に関する需要量、需要時間、及び需要位置を含む第1需要を取得するステップと、
移動体の需要に関する需要量、需要時間、及び需要位置を含む第2需要を取得するステップと、
前記第1需要及び前記第2需要に基づいて、前記移動体が移動する位置及び時間を決定する処理、又は、前記第1需要と前記第2需要との双方の需要を満たすことができるか判断する処理の少なくとも一方を行うステップと
を備える制御方法。 - コンピュータを、請求項1から8のいずれか一項に記載の統合制御装置として機能させるためのプログラム。
- 請求項11に記載のプログラムを記憶した記憶媒体。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP22746048.2A EP4287455A4 (en) | 2021-01-29 | 2022-01-28 | INTEGRATED CONTROL DEVICE, CONTROL METHOD, SERVER, PROGRAM AND STORAGE MEDIUM |
| JP2022566272A JP7221466B2 (ja) | 2021-01-29 | 2022-01-28 | 統合制御装置、制御方法、サーバ、プログラム、記憶媒体 |
| JP2023014307A JP2023054820A (ja) | 2021-01-29 | 2023-02-01 | 統合制御装置、制御方法、サーバ、プログラム、記憶媒体 |
| US18/337,443 US20230382263A1 (en) | 2021-01-29 | 2023-06-20 | Integrated control device, control method, and computer-readable storage medium |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021013826 | 2021-01-29 | ||
| JP2021-013826 | 2021-01-29 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US18/337,443 Continuation US20230382263A1 (en) | 2021-01-29 | 2023-06-20 | Integrated control device, control method, and computer-readable storage medium |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022163829A1 true WO2022163829A1 (ja) | 2022-08-04 |
Family
ID=82654724
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/003411 Ceased WO2022163829A1 (ja) | 2021-01-29 | 2022-01-28 | 統合制御装置、制御方法、サーバ、プログラム、記憶媒体 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20230382263A1 (ja) |
| EP (1) | EP4287455A4 (ja) |
| JP (2) | JP7221466B2 (ja) |
| WO (1) | WO2022163829A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2024070109A1 (ja) * | 2022-09-28 | 2024-04-04 | ||
| WO2024127920A1 (ja) * | 2022-12-16 | 2024-06-20 | 住友電気工業株式会社 | 配送計画作成装置、配送計画作成方法、およびコンピュータプログラム |
| JPWO2024180675A1 (ja) * | 2023-02-28 | 2024-09-06 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011142779A (ja) * | 2010-01-08 | 2011-07-21 | Panasonic Electric Works Co Ltd | エネルギ配送システム |
| JP2012200065A (ja) * | 2011-03-21 | 2012-10-18 | Denso Corp | エネルギ輸送システム |
| JP2012208686A (ja) * | 2011-03-29 | 2012-10-25 | Denso Corp | 電力供給システム |
| JP2018124674A (ja) | 2017-01-30 | 2018-08-09 | 本田技研工業株式会社 | V2gシステム、サーバ装置及び輸送機器 |
| JP2021002940A (ja) * | 2019-06-21 | 2021-01-07 | 株式会社デンソー | エネルギマネージメント方法、及びエネルギマネージメント装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008141246A2 (en) * | 2007-05-09 | 2008-11-20 | Gridpoint, Inc. | Method and system for scheduling the discharge of distributed power storage devices and for levelizing dispatch participation |
| US10017068B2 (en) * | 2014-06-19 | 2018-07-10 | Proterra Inc. | Charging of a fleet of electric vehicles |
| US20160247106A1 (en) * | 2015-02-24 | 2016-08-25 | Siemens Aktiengesellschaft | Managing a fleet of autonomous electric vehicles for on-demand transportation and ancillary services to electrical grid |
| JP6918032B2 (ja) * | 2019-01-17 | 2021-08-11 | 本田技研工業株式会社 | 送受電管理装置及びプログラム |
-
2022
- 2022-01-28 JP JP2022566272A patent/JP7221466B2/ja active Active
- 2022-01-28 EP EP22746048.2A patent/EP4287455A4/en active Pending
- 2022-01-28 WO PCT/JP2022/003411 patent/WO2022163829A1/ja not_active Ceased
-
2023
- 2023-02-01 JP JP2023014307A patent/JP2023054820A/ja active Pending
- 2023-06-20 US US18/337,443 patent/US20230382263A1/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011142779A (ja) * | 2010-01-08 | 2011-07-21 | Panasonic Electric Works Co Ltd | エネルギ配送システム |
| JP2012200065A (ja) * | 2011-03-21 | 2012-10-18 | Denso Corp | エネルギ輸送システム |
| JP2012208686A (ja) * | 2011-03-29 | 2012-10-25 | Denso Corp | 電力供給システム |
| JP2018124674A (ja) | 2017-01-30 | 2018-08-09 | 本田技研工業株式会社 | V2gシステム、サーバ装置及び輸送機器 |
| JP2021002940A (ja) * | 2019-06-21 | 2021-01-07 | 株式会社デンソー | エネルギマネージメント方法、及びエネルギマネージメント装置 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2024070109A1 (ja) * | 2022-09-28 | 2024-04-04 | ||
| WO2024070109A1 (ja) * | 2022-09-28 | 2024-04-04 | 本田技研工業株式会社 | システム、方法及びプログラム |
| JP7686160B2 (ja) | 2022-09-28 | 2025-05-30 | 本田技研工業株式会社 | システム、方法及びプログラム |
| WO2024127920A1 (ja) * | 2022-12-16 | 2024-06-20 | 住友電気工業株式会社 | 配送計画作成装置、配送計画作成方法、およびコンピュータプログラム |
| JPWO2024180675A1 (ja) * | 2023-02-28 | 2024-09-06 | ||
| WO2024180675A1 (ja) * | 2023-02-28 | 2024-09-06 | 北海道電力株式会社 | 情報処理装置、情報処理方法および食品配送システム |
| JP7651010B2 (ja) | 2023-02-28 | 2025-03-25 | 北海道電力株式会社 | 情報処理装置、情報処理方法および食品配送システム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20230382263A1 (en) | 2023-11-30 |
| JP7221466B2 (ja) | 2023-02-13 |
| EP4287455A1 (en) | 2023-12-06 |
| JPWO2022163829A1 (ja) | 2022-08-04 |
| JP2023054820A (ja) | 2023-04-14 |
| EP4287455A4 (en) | 2024-12-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6913114B2 (ja) | 制御装置及びプログラム | |
| JP7221466B2 (ja) | 統合制御装置、制御方法、サーバ、プログラム、記憶媒体 | |
| US11393335B2 (en) | Power transfer managing apparatus, and computer-readable storage medium | |
| CN111446729B (zh) | 控制装置以及计算机可读存储介质 | |
| Zhang et al. | Joint fleet sizing and charging system planning for autonomous electric vehicles | |
| Cokyasar | Optimization of battery swapping infrastructure for e-commerce drone delivery | |
| JP6183539B2 (ja) | 作業員管理装置、作業員管理システム及び作業員管理方法 | |
| JP7065212B2 (ja) | 送受電管理装置及びプログラム | |
| WO2020105249A1 (ja) | 情報処理方法及び情報処理システム | |
| KR102207659B1 (ko) | 인공지능 기반의 화물운송 배차 스케쥴링 장치 | |
| JP7256097B2 (ja) | 情報処理システム及びプログラム | |
| CN111439136A (zh) | 控制装置以及计算机可读存储介质 | |
| Li et al. | An agent-based simulation for shared automated electric vehicles with vehicle relocation | |
| KR102721652B1 (ko) | 예약 호출 기반 대도시권 수요응답형 대중 교통 노선 실시간 생성 시스템 및 그 방법 | |
| Sun et al. | The traveling salesman problem: Route planning of recharging station-assisted drone delivery | |
| US20130054312A1 (en) | Distributed energy contribution-based commuting | |
| WO2023022140A1 (ja) | 統合管理装置、管理方法、サーバ、プログラム、記憶媒体 | |
| CN111738895B (zh) | 多站点的客运线路生成方法、装置、介质及电子设备 | |
| JP2024049253A (ja) | システム、方法及びプログラム | |
| Nakao et al. | A Case Study on Strategic Planning of Mixed Fleets and Charging Infrastructure for Low-Emission Demand-Responsive Feeder Services in Bettembourg, Luxembourg | |
| Sadati et al. | Electric Vehicle Routing Problem with Synchronized Mobile Charging Stations: Bi-Level vs. Joint Optimization Approaches | |
| WO2026042151A1 (ja) | 予約管理方法、および予約管理システム | |
| JP2024017748A (ja) | 運行計画立案装置及び運行計画立案方法 | |
| Keshavarzian et al. | Optimal dispatching and charging plans in electrified bus networks | |
| CN120069256A (zh) | 应急物流中无人机联合多模式交通的动态路径优化方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22746048 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2022566272 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202317047576 Country of ref document: IN |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2022746048 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2022746048 Country of ref document: EP Effective date: 20230829 |