WO2023080062A1 - 自己位置推定装置、自動運転車両、および自己位置推定方法 - Google Patents
自己位置推定装置、自動運転車両、および自己位置推定方法 Download PDFInfo
- Publication number
- WO2023080062A1 WO2023080062A1 PCT/JP2022/040246 JP2022040246W WO2023080062A1 WO 2023080062 A1 WO2023080062 A1 WO 2023080062A1 JP 2022040246 W JP2022040246 W JP 2022040246W WO 2023080062 A1 WO2023080062 A1 WO 2023080062A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- information
- self
- container
- map information
- storage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images









Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/24—Arrangements for determining position or orientation
- G05D1/246—Arrangements for determining position or orientation using environment maps, e.g. simultaneous localisation and mapping [SLAM]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/005—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 with correlation of navigation data from several sources, e.g. map or contour matching
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3807—Creation or updating of map data characterised by the type of data
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3833—Creation or updating of map data characterised by the source of data
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3863—Structures of map data
- G01C21/3867—Geometry of map features, e.g. shape points, polygons or for simplified maps
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/24—Arrangements for determining position or orientation
- G05D1/242—Means based on the reflection of waves generated by the vehicle
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/646—Following a predefined trajectory, e.g. a line marked on the floor or a flight path
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/69—Coordinated control of the position or course of two or more vehicles
- G05D1/692—Coordinated control of the position or course of two or more vehicles involving a plurality of disparate vehicles
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/69—Coordinated control of the position or course of two or more vehicles
- G05D1/698—Control allocation
- G05D1/6987—Control allocation by centralised control off-board any of the vehicles
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/08—Logistics, e.g. warehousing, loading or distribution; Inventory or stock management
- G06Q10/087—Inventory or stock management, e.g. order filling, procurement or balancing against orders
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2105/00—Specific applications of the controlled vehicles
- G05D2105/20—Specific applications of the controlled vehicles for transportation
- G05D2105/28—Specific applications of the controlled vehicles for transportation of freight
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2107/00—Specific environments of the controlled vehicles
- G05D2107/70—Industrial sites, e.g. warehouses or factories
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2107/00—Specific environments of the controlled vehicles
- G05D2107/80—Transportation hubs
- G05D2107/84—Harbours
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2109/00—Types of controlled vehicles
- G05D2109/10—Land vehicles
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2111/00—Details of signals used for control of position, course, altitude or attitude of land, water, air or space vehicles
- G05D2111/10—Optical signals
- G05D2111/17—Coherent light, e.g. laser signals
Definitions
- the present disclosure relates to a self-localization device, an autonomous vehicle, and a self-localization method.
- AGVs automatic guided vehicles
- containers that are temporarily stored for marine transportation.
- AGVs used in container terminals transmit radio waves from radio transmitters installed in their own equipment, and use the transponder system to utilize responses from radio transponders embedded in advance at predetermined positions on the ground. It is estimating its own position.
- the AGV in order for the AGV to use the transponder technology, it is necessary to install radio transponders at predetermined positions in the container terminal premises in advance.
- AGV can estimate its own position with simple processing by using map information generated in advance in the facility and surrounding environment information acquired by LiDAR (Light Detection And Ranging). .
- the AGV can travel to a predetermined destination based on the estimated self-location information.
- the storage of each container in the container terminal premises is temporary, and the container storage situation in the premises changes from moment to moment. Therefore, in order to perform self-position estimation processing using map information and environmental information as described above in the container terminal premises, the AGV needs to update the map information to be used according to changes in the container storage situation in the premises. There is a need to.
- SLAM Simultaneous Localization and Mapping
- the AGV since the container storage situation changes frequently in the container terminal premises as described above, when the AGV detects this change using SLAM technology, it is necessary to determine whether the map information should be updated or the self-position estimation value should be corrected. may not be determined correctly. Therefore, if the AGV corrects the self-position estimation value even though the container storage situation has changed, it may not be possible to perform accurate self-position estimation, and the AGV may not be able to travel appropriately. .
- An object of the present disclosure is to provide a self-position estimation device, an automatic driving vehicle, and a self-position estimation method that can easily and accurately estimate the self-position in a facility in which objects of a predetermined shape are stored.
- a self-position estimation device includes a map information acquisition unit that acquires map information within a storage facility generated based on shape information of an object and storage status information of the object within the storage facility. an environment information acquisition unit that acquires surrounding environment information; and a self-location estimation unit that estimates a self-location based on the map information acquired by the map information acquisition unit and the environment information acquired by the environment information acquisition unit. Prepare.
- the self-position estimation device is communicatively connected to a storage facility management device that manages the shape information of the object and the storage status information of the object in the storage facility, and is attached to a moving body moving in the storage facility.
- the map information acquisition unit is mounted on the storage facility management device, the moving object, Alternatively, map information generated by a map information generation device communicably connected to the storage facility management device and the self-position estimation device is acquired, and the environment information acquisition unit acquires environment information around the mobile object.
- the self-position estimation unit may estimate the position of the moving body as the self-position.
- the storage facility has a plurality of storage spaces for storing the objects, and the storage status information of the objects is stored in each of the plurality of storage spaces and position information of each of the plurality of storage spaces. Information on the number of the objects may be included.
- the self-driving vehicle includes the above self-position estimation device, a moving mechanism unit that moves the self-driving vehicle, and the self-driving vehicle based on the self-position estimated by the self-position estimation device. and a travel control unit that controls the movement mechanism unit so that the vehicle moves along a predetermined route.
- a self-localization method acquires map information in a storage facility generated based on shape information of an object and storage status information of the object in the storage facility; Acquiring environment information; and estimating a self-location based on the acquired map information and the environment information.
- FIG. 1 is an overall diagram showing the configuration of a container management system using self-position estimation devices according to first to third embodiments.
- FIG. 2 is a block diagram showing the configuration of a container management system using the self-position estimation device according to the first embodiment.
- FIG. 3A is an example of coordinate information for each storage space in the container terminal premises, which is stored in the container management device connected to the self-localization device according to the first embodiment.
- FIG. 3B is an example of information about the type and number of containers currently stored for each storage space in the container terminal premises, which is stored in the container management device connected to the self-position estimation device according to the first embodiment. .
- FIG. 1 is an overall diagram showing the configuration of a container management system using self-position estimation devices according to first to third embodiments.
- FIG. 2 is a block diagram showing the configuration of a container management system using the self-position estimation device according to the first embodiment.
- FIG. 3A is an example of coordinate information for each storage space in the container terminal premises, which is stored in the container management device
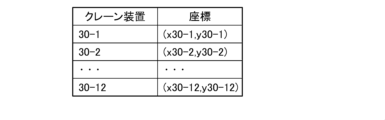
- FIG. 3C is an example of coordinate information of each crane device within the premises of the container terminal, which is stored in the container management device connected to the self-position estimation device according to the first embodiment.
- FIG. 4 is a sequence diagram showing operations of the container management system using the self-position estimation device according to the first embodiment.
- FIG. 5 is a block diagram showing the configuration of a container management system using the self-position estimation device according to the second embodiment.
- FIG. 6 is a sequence diagram showing the operation of the container management system using the self-position estimation device according to the second embodiment.
- FIG. 7 is a block diagram showing the configuration of a container management system using a self-position estimation device according to the third embodiment.
- FIG. 8 is a sequence diagram showing the operation of the container management system using the self-position estimation device according to the third embodiment.
- a container terminal is a facility for temporarily storing imported containers (objects).
- FIG. 1A (First embodiment) (Configuration of container management system 1A according to first embodiment) A configuration of a container management system 1A according to the first embodiment will be described with reference to FIGS. 1 and 2.
- FIG. 1A the container management system 1A manages the storage status of containers within the premises of the container terminal 10 and manages the operations of the AGV and the crane apparatus installed within the premises of the container terminal 10 .
- Fig. 1 is a top view of the premises of the container terminal 10.
- the container terminal 10 has a plurality of preset container storage areas 11-18.
- Each container storage area 11 to 18 has, for example, 50 storage spaces (11-1 to 11-50, 12-1 to 12-50, 18-1 to 18-50).
- the container management system 1A includes three AGVs 20A-1 to 20A-3 running within the premises of the container terminal 10, crane devices 30-1 to 30-12 installed within the premises of the container terminal 10, and a container management device 40A. Prepare.
- the number of AGVs used in the container management system 1A is not limited to three, and may be less or more. In the following description, AGV20A will be used when the AGV is not specified among AGV20A-1 to 20A-3.
- Each of the crane devices 30-1 to 30-12 is installed in one of the container storage areas 11 to 18 so as to be able to move laterally.
- the crane devices 30-1 and 30-2 are installed in the container storage area 11.
- Crane devices 30 - 3 and 30 - 4 are installed in container storage area 12 .
- the crane devices 30-5 and 30-6 are installed in the container storage area 13.
- Crane devices 30-7 and 30-8 are installed in the container storage area .
- a crane device 30 - 9 is installed in the container storage area 15 .
- a crane device 30 - 10 is installed in the container storage area 16 .
- a crane device 30 - 11 is installed in the container storage area 17 .
- a crane device 30-12 is installed in the container storage area 18. As shown in FIG.
- the number of crane devices installed on the premises of the container terminal 10 is not limited to 12, and may be less or more.
- the crane device 30 when it is not specified which of the crane devices 30-1 to 30-12 in the premises of the container terminal 10, the crane device will be referred to as the crane device 30.
- the container management device 40A has a storage section 41A, an instruction input section 42, a first wireless communication section 43, and a first CPU 44A.
- the storage unit 41A has a container information storage unit 411 , a crane information storage unit 412 and a first map information storage unit 413 .
- the container information storage unit 411 stores storage status information including shape information and storage position information of each container stored in the container terminal 10 premises.
- the crane information storage unit 412 stores shape information and position information of each of the crane devices 30-1 to 30-12 installed in the container terminal 10 premises.
- the first map information storage unit 413 stores map information of the premises of the container terminal 10 generated and updated as described later.
- the instruction input unit 42 inputs a container carry-in instruction and a container carry-out instruction by an operator's operation or the like.
- the first wireless communication unit 43 performs wireless communication with the AGVs 20A-1 to 20A-3 and the crane devices 30-1 to 30-12.
- the first CPU 44A has a transportation instruction processing unit 441, a first map information generation unit 442, and an information update unit 443.
- the transport instruction processing unit 441 transmits the container carry-in instruction or carry-out instruction input from the instruction input unit 42 to the corresponding crane device 30 and AGV 20A via the first wireless communication unit 43 .
- the first map information generation unit 442 generates map information of the premises of the container terminal 10 based on the information stored in the container information storage unit 411 and the information stored in the crane information storage unit 412, and It is stored in the information storage unit 413 .
- the first map information generation unit 442 updates the map information stored in the first map information storage unit 413 based on the updated information.
- the first map information generation unit 442 transmits the generated or updated map information to the AGVs 20A-1 to 20A-3 via the first wireless communication unit 43.
- the information update unit 443 updates the container information and the crane information stored in the storage unit 41A. Update.
- the AGV 20A-1 includes an LRF (laser range finder) sensor 21-1, a second wireless communication unit 22-1, a second map information storage unit 23-1, a movement mechanism unit 24-1, and a second CPU 25A-1. and
- the LRF sensor 21-1 measures the distance to surrounding objects.
- the second wireless communication unit 22-1 performs wireless communication with the container management device 40A.
- the second map information storage unit 23-1 stores map information of the premises of the container terminal 10 acquired from the container management device 40A.
- the moving mechanism section 24-1 is a mechanism for moving the AGV 20A-1.
- the second CPU 25A-1 has a self-position estimation device 200A-1 and a traveling control section 251-1.
- Self-position estimation device 200A-1 has environment information acquisition section 201-1, map information acquisition section 202-1, and self-position estimation section 203-1.
- the environment information acquisition unit 201-1 acquires information measured by the LRF sensor 21-1 as surrounding environment information.
- the map information acquisition unit 202-1 acquires the map information of the premises of the container terminal 10 from the container management device 40A via the second wireless communication unit 22-1, the map information is stored in the second map information storage unit 23-1. Memorize.
- the map information acquisition unit 202-1 acquires a container carry-in instruction or a container carry-out instruction from the container management device 40A, the map information acquisition unit 202-1 reads the map information of the premises of the container terminal 10 stored in the second map information storage unit 23-1.
- the self-position estimation unit 203-1 estimates the self-position based on the surrounding environment information acquired by the environment information acquisition unit 201-1 and the map information of the premises of the container terminal 10 read by the map information acquisition unit 202-1. presume. Travel control unit 251-1 controls movement mechanism unit 24-1 so that AGV 20A-1 moves along a predetermined route R based on the self-position estimated by self-position estimation unit 203-1.
- AGV 20A-2 and 20A-3 are the same as the configuration of AGV 20A-1, so detailed description will be omitted.
- the crane device 30-1 has a third wireless communication section 31-1, a transportation mechanism section 32-1, and a third CPU 33-1.
- the third wireless communication unit 31-1 performs wireless communication with the container management device 40A.
- the transport mechanism section 32-1 is a mechanism for transporting containers between the AGV 20A and the corresponding storage space.
- the third CPU 33-1 has an operation control section 331-1 that controls the transport mechanism section 32-1 based on the container carry-in instruction or carry-out instruction acquired via the third wireless communication section 31-1.
- the configurations of the crane devices 30-2 to 30-12 are the same as the configuration of the crane device 30-1, so detailed description will be omitted.
- FIGS. 3A and 3B An example of information stored in the container information storage unit 411 of the container management device 40A in this embodiment is shown in FIGS. 3A and 3B.
- FIG. 3A shows coordinate information for each storage space within the container terminal 10 premises.
- This coordinate information has one point in the premises of the container terminal 10, for example, a point P which is one corner of the rectangular container terminal 10 as shown in FIG. position coordinates for a given point in each storage space when
- FIG. 3B shows the types and number of containers currently stored for each storage space within the container terminal 10 premises.
- the types of containers stored in the premises of the container terminal 10 are, for example, a 20-ft container having a length of 6,058 mm, a width of 2,438 mm, and a height of 2,591 mm, and a There are two types, one with a 40ft container.
- the container information storage unit 411 stores, as shape information for each container type, shape information based on 3D point cloud data generated in advance by LiDAR measurement or LiDAR simulation for 20ft containers and 40ft containers.
- FIG. 3C shows coordinate information of each crane device 30-1 to 30-12 within the premises of the container terminal 10.
- This coordinate information is a predetermined point in each of the crane devices 30-1 to 30-12 when the origin is the point P in the premises of the container terminal 10, the horizontal direction is the x-axis, and the vertical direction indicating the depth is the y-axis. are the position coordinates with respect to
- the crane information storage unit 412 of the container management device 40A stores shape information based on 3D point cloud data acquired in advance by LiDAR simulation or the like for each of the crane devices 30-1 to 30-12.
- the AGVs 20A-1, 20A-2, and 20A-3 are stopped in a predetermined waiting area D within the premises of the container terminal 10 when the operation of the container management system 1A is started.
- the first map information generation unit 442 of the container management device 40A generates 3D point cloud data based on the information stored in the container information storage unit 411 and the information stored in the crane information storage unit 412. Then, map information of the container terminal 10 premises is generated. At this time, since the container information storage unit 411 stores information on the type and number of containers stored for each storage space, the first map information generation unit 442 uses this information to determine the storage space. It is possible to recognize the shape information of the entire container for each container. Then, the first map information generation unit 442 rotates the recognized shape information of the entire container for each storage space and the stored shape information of the crane device 30 to a predetermined azimuth angle, and translates them to the corresponding positions. By doing so, the corresponding map information can be generated.
- the first map information generation unit 442 When generating the map information, the first map information generation unit 442 adds the identification information of the corresponding container to the 3D point cloud data corresponding to each container. The first map information generation unit 442 causes the first map information storage unit 413 to store the generated map information of the premises of the container terminal 10 . Further, the first map information generation unit 442 transmits the generated map information of the premises of the container terminal 10 to the AGVs 20A-1 to 20A-3 via the first wireless communication unit 43 (S1).
- Each of the AGVs 20A-1 to 20A-3 acquires the map information of the premises of the container terminal 10 transmitted from the container management device 40A via the second wireless communication units 22-1 to 22-3 to the map information acquisition units 202-1 to 202-3. Acquired at 202-3.
- the map information acquisition units 202-1 to 202-3 respectively store the acquired map information of the premises of the container terminal 10 in the second map information storage units 23-1 to 23-3 (S2).
- the transport instruction processing unit 441 determines the crane device 30 and the AGV 20A to execute the processing according to the instruction. Then, the transport instruction processing unit 441 transmits the instruction information to the corresponding crane device 30 and AGV 20A via the first wireless communication unit 43 (S3).
- the transport instruction processing unit 441 first determines to cause the crane device 30-8 and the AGV 20A-1 to carry out the container X carry-out process. Then, the transport instruction processing unit 441 transmits information regarding the carry-out instruction for the container X to the crane device 30-8 and the AGV 20A-1 via the first wireless communication unit 43.
- the transport instruction processing unit 441 determines to cause the crane device 30-3 and the AGV 20A-2 to carry in the container Y. Then, the transport instruction processing unit 441 transmits information regarding the carry-in instruction for the container Y to the crane device 30-3 and the AGV 20A-2 via the first wireless communication unit 43.
- FIG. 1
- the environment information acquisition unit 201-1 of the self-position estimation device 200A-1 receives the LRF Information on the distance to surrounding objects measured by the sensor 21-1 is acquired. Based on the acquired information, the environment information acquisition unit 201-1 generates surrounding shape information representing the shape of surrounding objects in 3D point cloud data.
- the map information acquisition unit 202-1 stores the information in the second map information storage unit 23. -1 is read out the map information of the premises of the container terminal 10 stored. Then, the self-position estimation unit 203-1 generates 3D point cloud data representing the surrounding shape information generated by the environment information acquisition unit 201-1 and 3D point cloud data representing the map information read by the map information acquisition unit 202-1. , the self-position is estimated (S4). Techniques such as known NDT (Normal Distributions Transform) scan matching, for example, can be used for this 3D point cloud data matching process.
- NDT Normal Distributions Transform
- the travel control unit 251-1 controls the movement mechanism unit 24-1 so that the AGV 20A-1 moves on the route R based on the self-position estimated by the self-position estimation unit 203-1.
- the movement mechanism section 24-1 causes the AGV 20A-1 to travel on the route R within the premises of the container terminal 10 to a position close to the storage space 14-8 under the control of the travel control section 251-1 (S5).
- the crane device 30-8 carries out the container X based on the instruction information acquired from the container management device 40A (S6).
- the action of carrying out the container X by the crane device 30-8 is the action of lifting the container X stored in the storage space 14-8 and loading it onto the AGV 20A-1.
- the crane device 30-8 When the operation of the crane device 30-8 is completed and the container X is loaded onto the AGV 20A-1, the crane device 30-8 notifies the container management device 40A of the completion of the operation related to unloading of the container X via the third wireless communication unit 31. -8 (S7).
- This operation completion notification includes the position information of the crane device 30-8 after the operation is completed.
- the information update unit 443 updates the container information storage unit 411 based on the notification.
- the stored container information and the crane information stored in the crane information storage unit 412 are updated. Specifically, the number of containers stored in the storage space 14-8 in the container information is decremented by one, and the position information of the crane device 30-8 is updated to the information included in the operation completion notification.
- the first map information generation unit 442 sends to the first map information storage unit 413 based on the updated information. Update the stored map information.
- the first map information generator 442 deletes the 3D point cloud data corresponding to the container X in the storage space 14-8 in the map information.
- the first map information generation unit 442 then stores the updated map information in the first map information storage unit 413 and transmits the updated map information to the AGV 20A-1 via the first wireless communication unit 43 (S8).
- the map information obtaining unit 202-1 stores the map information as the second map information.
- the information stored in the section 23-1 is updated (S9).
- the self-position estimation unit 203-1 estimates the self-position using the updated map information, and the traveling control unit 251-1 operates the movement mechanism unit 24-1 based on the estimated self-position.
- AGV 20A-1 is controlled to travel to standby area D (S10). The AGV 20A-1 waits in the standby area D until receiving the next carry-in instruction or carry-out instruction.
- the AGV 20A-2 which has acquired the carry-in instruction in step S3, loads the container Y to be carried in the waiting area D, and the self-position estimation device 200A-2 estimates its own position (S4) in the same manner as the AGV 20A-1. .
- the AGV 20A-2 then travels along the route R to a position close to the storage space 12-3 based on the estimated self-position (S5).
- the AGV 20A-2 reaches a position close to the storage space 12-3 and stops, and the crane device 30-3 lifts the container Y loaded on the AGV 20A-2 and stores it in the storage space 12-3.
- the crane device 30-3 transmits an operation completion notification regarding the loading of the container Y to the container management device 40A via the third wireless communication unit 31-3 (S7), based on the notification
- the information updating unit 443 updates the container information stored in the container information storage unit 411 and the crane information stored in the crane information storage unit 412 . Specifically, the number of containers stored in the storage space 12-3 in the container information is increased by one, and the position information of the crane device 30-3 is updated to the information included in the operation completion notification.
- the first map information generation unit 442 sends to the first map information storage unit 413 based on the updated information. Update the stored map information.
- the first map information generation unit 442 then stores the updated map information in the first map information storage unit 413 and transmits the updated map information to the AGV 20A-2 via the first wireless communication unit 43 (S8).
- the map information acquisition unit 202-2 stores the map information as the second map information.
- the information stored in the section 23-2 is updated (S9).
- the self-position estimation unit 203-2 estimates the self-position using the updated map information, and the traveling control unit 251-2 operates the movement mechanism unit 24-2 based on the estimated self-position.
- AGV 20A-2 is controlled to travel to waiting area D (S10). The AGV 20A-2 waits in the standby area D until receiving the next carry-in instruction or carry-out instruction.
- the AGV 20A easily and accurately estimates its own position using the map information generated based on the shape information and the position information of the container and the crane device 30 in the container terminal 10 premises. can do. Also, the AGV 20A can appropriately travel a predetermined route within the premises of the container terminal 10 using the estimated self-location information. At this time, the container management device 40A generates the map information of the premises of the container terminal 10 and supplies it to the plurality of AGVs 20A, so each AGV 20A can efficiently execute self-position estimation processing with a small processing load. Further, in the container terminal 10, the shape of the containers stored in the premises is limited to several patterns, and the positions of the storage spaces in which the containers are stored are also set in advance. Therefore, the container management device 40A can easily generate map information of the premises of the container terminal 10 by using the position information of each storage space and the shape and number of stored containers.
- FIG. 1B (Second embodiment) (Configuration of container management system 1B according to the second embodiment) A configuration of a container management system 1B according to the second embodiment will be described with reference to FIGS. 1 and 5.
- FIG. 1B the first CPU 44B of the container management device 40B has a first management information transmission control section 444 instead of the first map information generation section 442 described in the first embodiment.
- the storage unit 41B of the container management device 40B does not have the first map information storage unit 413 described in the first embodiment.
- self-position estimation devices 200B-1 to 200B-3 of AGVs 20B-1 to 20B-3 have second map information generation units 204-1 to 204-3 as map information acquisition units.
- the configuration of the container management system 1B other than these is the same as the configuration of the container management system 1A described in the first embodiment, so detailed descriptions of portions having the same functions will be omitted.
- the first management information transmission control unit 444 of the container management device 40B transmits the information stored in the container information storage unit 411 and the information stored in the crane information storage unit 412 to the first wireless communication unit 43. to AGVs 20B-1 to 20B-3.
- the second map information generators 204-1 to 204-3 of the AGVs 20B-1 to 20B-3 select the container based on the information acquired from the container management device 40B via the second wireless communication units 22-1 to 22-3. Map information of the premises of terminal 10 is generated and stored in second map information storage units 23-1 to 23-3.
- the first management information transmission control unit 444 of the container management device 40B transmits the container information stored in the container information storage unit 411 and the crane information stored in the crane information storage unit 412 to the first wireless communication unit 43. to the AGVs 20B-1 to 20B-3 (S11).
- the AGVs 20B-1 to 20B-3 When the AGVs 20B-1 to 20B-3 acquire the container information and the crane information transmitted from the container management device 40B via the second wireless communication units 22-1 to 22-3, the AGVs 20B-1 to 20B-3 display the second map based on the acquired information.
- Information generators 204-1 to 204-3 generate map information of the premises of the container terminal 10, which is composed of 3D point cloud data.
- the second map information generation units 204-1 to 204-3 respectively store the generated map information in the second map information storage units 23-1 to 23-3 (S12).
- steps S13 to S17 executed when a predetermined container carry-in instruction or carry-out instruction is input by the instruction input unit 42 of the container management device 40B is the same as steps S3 to S7 described in the first embodiment. Since it is the same as the processing, detailed description is omitted.
- an operation completion notification regarding the process is transmitted from the crane device 30 to the container management device 40B via the third wireless communication units 31-1 to 31-12 (S17).
- the information update unit 443 updates the container information and crane information stored in the storage unit 41B based on the notification.
- the first management information transmission control section 444 transmits the updated container information and crane information to the AGVs 20B-1 to 20B-3 via the first wireless communication section 43 (S18).
- the second map information generation units 204-1 to 204-3 of the AGVs 20B-1 to 20B-3 transmit the updated container information and crane information transmitted from the container management device 40B to the second wireless communication units 22-1 to 22. -3. Based on the acquired information, the second map information generation units 204-1 to 204-3 update and store the map information stored in the second map information storage units 23-1 to 23-3 (S19). .
- the self-position estimation units 203-1 to 203-3 of the AGVs 20B-1 to 20B-3 that have performed the carry-in process or the carry-out process estimate their own positions using the updated map information, and based on the estimated self-positions
- the traveling control units 251-1 to 251-3 control the moving mechanism units 24-1 to 24-3 to cause the AGVs 20B-1 to 20B-3 to travel to the standby area D (S20).
- the AGVs 20B-1 to 20B-3 wait in the standby area D until receiving the next carry-in instruction or carry-out instruction.
- the AGVs 20B-1 to 20B-3 traveling within the premises of the container terminal 10 acquire the map information of the premises generated based on the shape information and position information of the containers and the crane device 30 within the premises. Using this, it is possible to easily and accurately estimate the self-position and travel. At that time, since each of the AGVs 20B-1 to 20B-3 generates map information of the premises of the container terminal 10, each of the AGVs 20B-1 to 20B-3 can generate map information of necessary positions according to the travel route. .
- FIG. A container management system 1C according to this embodiment further includes a map information generation device 50 in addition to the configuration of the container management system 1A described in the first embodiment.
- the first CPU 44C of the container management device 40C has a second management information transmission control section 445 instead of the first map information generation section 442 described in the first embodiment.
- the storage unit 41C of the container management device 40C does not have the first map information storage unit 413 described in the first embodiment. Since the configuration of the container management system 1C other than these is the same as the configuration of the container management system 1A described in the first embodiment, detailed description of portions having the same functions will be omitted.
- the second management information transmission control unit 445 of the container management device 40C transmits the information stored in the container information storage unit 411 and the information stored in the crane information storage unit 412 to the map information generation device 50. Send.
- the map information generation device 50 has a management information acquisition unit 51, a fourth wireless communication unit 52, a third map information generation unit 53, and a third map information storage unit .
- the management information acquisition unit 51 acquires information transmitted from the container management device 40C.
- the fourth radio communication unit 52 performs radio communication with the AGVs 20C-1 to 20C-3.
- the third map information generation unit 53 generates and updates map information of the premises of the container terminal 10 based on the information acquired from the container management device 40C, and sends the map information to the AGVs 20C-1 to 20C-3 via the fourth wireless communication unit 52.
- the third map information storage unit 54 stores the map information of the premises of the container terminal 10 generated and updated by the third map information generation unit 53 .
- map information acquisition units 202-1 to 202-3 of the AGVs 20C-1 to 20C-3 acquire the map information on the premises of the container terminal 10 from the map information generation device 50 via the second wireless communication unit 22-1,
- the map information is stored in the second map information storage section 23-1.
- the second management information transmission control unit 445 of the container management device 40C transmits the container information stored in the container information storage unit 411 and the crane information stored in the crane information storage unit 412 to the map information generation device 50. Send (S21).
- the management information acquisition unit 51 acquires the container information and the crane information transmitted from the container management device 40C, and the third map information generation unit 53 creates a map of the premises of the container terminal 10 based on the acquired information. Generate information.
- the third map information generation unit 53 stores the generated map information of the premises of the container terminal 10 in the third map information storage unit 54, and transmits the generated map information to the AGVs 20C-1 to 20C-3 via the fourth wireless communication unit 52. (S22).
- the map information of the premises of the container terminal 10 transmitted from the map information generation device 50 is sent to the map information acquisition units 202-1 to 202-1 through the second wireless communication units 22-1 to 22-3. 202-3 obtains.
- the map information acquisition units 202-1 to 202-3 respectively store the acquired map information of the premises of the container terminal 10 in the second map information storage units 23-1 to 23-3 (S23).
- steps S24 to S28 executed when a predetermined container carry-in instruction or carry-out instruction is input by the instruction input unit 42 of the container management device 40C is the same as steps S3 to S7 described in the first embodiment. Since it is the same as the processing, detailed description is omitted.
- the crane device 30 transmits an operation completion notification regarding the processing to the container management device 40C via the third wireless communication units 31-1 to 31-12 (S28).
- the information updating unit 443 updates the container information and the crane information stored in the storage unit 41C based on the notification.
- the second management information transmission control unit 445 transmits the updated container information and crane information to the map information generation device 50 (S29).
- the third map information generation unit 53 acquires the updated container information and crane information transmitted from the container management device 40C. Then, the third map information generator 53 updates the map information stored in the third map information storage unit 54 based on the acquired information. The third map information generation unit 53 also stores the updated map information in the third map information storage unit 54, and transmits the updated map information to the AGVs 20C-1 to 20C-3 via the fourth wireless communication unit 52 (S30).
- the map information acquisition units 202-1 to 202-3 202-3 updates the information stored in the second map information storage units 23-1 to 23-3 with the map information (S31). Then, the AGVs 20C-1 to 20C-3 that have performed the carry-out process or the carry-in process estimate their own positions using the updated map information, and the estimated self-positions Based on this, the traveling control units 251-1 to 251-3 control the moving mechanism units 24-1 to 24-3 to cause the AGVs 20C-1 to 20C-3 to travel to the standby area D (S32). The AGVs 20C-1 to 20C-3 wait in the standby area D until receiving the next carry-in instruction or carry-out instruction.
- the AGVs 20C-1 to 20C-3 traveling within the premises of the container terminal 10 acquire the map information of the premises generated based on the shape information and position information of the containers and the crane device 30 within the premises. Using this, it is possible to easily and accurately estimate the self-position and travel.
- the map information generation device 50 connected to the container management device 40C generates map information of the premises of the container terminal 10 and supplies it to the plurality of AGVs 20C-1 to 20C-3. By configuring in this way, it is possible to efficiently execute the self-position estimation process while reducing the processing load on the container management device 40C and the AGVs 20C-1 to 20C-3.
- 3D information is used as the shape information of the container, the shape information of the crane device 30, and the map information. may be used.
- 2D information updating of the map information is unnecessary when carrying-in processing or carrying-out processing of containers in the second stage or higher is performed to a predetermined storage space.
- the AGV 20 may switch to acquire self-location information by receiving GNSS signals and calculating location information.
- GNSS is GPS (Global Positioning System) as an example.
- Container terminal (storage facility) 11-1 to 11-50, 12-1 to 12-50, 13-1 to 13-50, 14-1 to 14-50, 15-1 to 15-50, 16-1 to 16-50, 17- 1 ⁇ 17-50, 18-1 ⁇ 18-50 Storage space 20, 20A-1 ⁇ 20A-3, 20B-1 ⁇ 20B ⁇ 3, 20C-1 ⁇ 20C-3 AGV (mobile) 24-1 to 24-3 Moving mechanism 40A, 40B, 40C Container management device (storage facility management device) 50 Map information generation device 200A-1 to 200A-3, 200B-1 to 200B-3, 200C-1 to 200C-3 (200) Self-position estimation device 201-1 to 201-3 (201) Environment information acquisition unit 202 -1 to 202-3 (202) Map information acquisition unit 203-1 to 203-3 (203) Self position estimation unit 204-1 to 204-3 (204) Second map information generation unit 251-1 to 251-3 Travel control unit X, Y Container (object)
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Business, Economics & Management (AREA)
- Aviation & Aerospace Engineering (AREA)
- Economics (AREA)
- Quality & Reliability (AREA)
- Strategic Management (AREA)
- Development Economics (AREA)
- Theoretical Computer Science (AREA)
- Entrepreneurship & Innovation (AREA)
- Human Resources & Organizations (AREA)
- Finance (AREA)
- Marketing (AREA)
- Accounting & Taxation (AREA)
- Operations Research (AREA)
- Tourism & Hospitality (AREA)
- General Business, Economics & Management (AREA)
- Geometry (AREA)
- Mechanical Engineering (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Warehouses Or Storage Devices (AREA)
Abstract
Description
(第1実施形態に係るコンテナ管理システム1Aの構成)
第1実施形態に係るコンテナ管理システム1Aの構成について、図1および図2を参照して説明する。本実施形態において、コンテナ管理システム1Aは、コンテナターミナル10構内におけるコンテナの保管状況を管理するとともに、コンテナターミナル10構内に設置されたAGVおよびクレーン装置の動作を管理する。
本実施形態によるコンテナ管理システム1Aの動作について説明する。本実施形態において、コンテナ管理装置40Aのコンテナ情報記憶部411に記憶される情報の一例を、図3Aおよび図3Bに示す。
(第2実施形態に係るコンテナ管理システム1Bの構成)
第2実施形態に係るコンテナ管理システム1Bの構成について、図1および図5を参照して説明する。本実施形態によるコンテナ管理システム1Bは、コンテナ管理装置40Bの第1CPU44Bが、第1実施形態で説明した第1地図情報生成部442に替えて第1管理情報送信制御部444を有する。また、コンテナ管理装置40Bの記憶部41Bが、第1実施形態で説明した第1地図情報記憶部413を有しない。さらに、AGV20B-1~20B-3の自己位置推定装置200B-1~200B-3が、地図情報取得部としての第2地図情報生成部204-1~204-3を有する。これら以外のコンテナ管理システム1Bの構成は、第1実施形態で説明したコンテナ管理システム1Aの構成と同様であるため、同一機能を有する部分の詳細な説明は省略する。
本実施形態によるコンテナ管理システム1Bの動作について、図6のシーケンス図を参照して説明する。まず、コンテナ管理装置40Bの第1管理情報送信制御部444が、コンテナ情報記憶部411に記憶されたコンテナ情報と、クレーン情報記憶部412に記憶されたクレーン情報とを、第1無線通信部43を介してAGV20B-1~20B-3に送信する(S11)。
(第3実施形態に係るコンテナ管理システム1Cの構成)
第3実施形態に係るコンテナ管理システム1Cの構成について、図1および図7を参照して説明する。本実施形態によるコンテナ管理システム1Cは、第1実施形態で説明したコンテナ管理システム1Aの構成に、さらに地図情報生成装置50を備える。また、コンテナ管理装置40Cの第1CPU44Cが、第1実施形態で説明した第1地図情報生成部442に替えて第2管理情報送信制御部445を有する。さらに、コンテナ管理装置40Cの記憶部41Cが、第1実施形態で説明した第1地図情報記憶部413を有しない。これら以外のコンテナ管理システム1Cの構成は、第1実施形態で説明したコンテナ管理システム1Aの構成と同様であるため、同一機能を有する部分の詳細な説明は省略する。
本実施形態によるコンテナ管理システム1Cの動作について、図8のシーケンス図を参照して説明する。まず、コンテナ管理装置40Cの第2管理情報送信制御部445が、コンテナ情報記憶部411に記憶されたコンテナ情報と、クレーン情報記憶部412に記憶されたクレーン情報とを、地図情報生成装置50に送信する(S21)。
11-1~11-50、12-1~12-50、13-1~13-50、14-1~14-50、15-1~15-50、16-1~16-50、17-1~17-50、18-1~18-50 保管スペース
20、20A-1~20A-3、20B-1~20B~3、20C-1~20C-3 AGV(移動体)
24-1~24-3 移動機構部
40A、40B、40C コンテナ管理装置(保管設備管理装置)
50 地図情報生成装置
200A-1~200A-3、200B-1~200B-3、200C-1~200C-3(200) 自己位置推定装置
201-1~201-3(201) 環境情報取得部
202-1~202-3(202) 地図情報取得部
203-1~203-3(203) 自己位置推定部
204-1~204-3(204) 第2地図情報生成部
251-1~251-3 走行制御部
X、Y コンテナ(物体)
Claims (6)
- 物体の形状情報および保管設備内における前記物体の保管状況情報に基づいて生成された、前記保管設備内の地図情報を取得する地図情報取得部と、
周囲の環境情報を取得する環境情報取得部と、
前記地図情報取得部で取得した地図情報および前記環境情報取得部で取得した環境情報に基づいて、自己位置を推定する自己位置推定部と、
を備えた自己位置推定装置。 - 前記自己位置推定装置は、前記物体の前記形状情報および前記保管設備内における前記物体の前記保管状況情報を管理する保管設備管理装置に通信可能に接続されて前記保管設備内を移動する移動体に搭載され、
前記地図情報取得部は、前記保管設備管理装置で管理されている前記物体の前記形状情報および前記保管設備内における前記保管状況情報に基づいて、前記保管設備管理装置、前記移動体、または前記保管設備管理装置と前記自己位置推定装置とに通信可能に接続された地図情報生成装置で生成された地図情報を取得し、
前記環境情報取得部は、前記移動体の周囲の環境情報を取得し、
前記自己位置推定部は、前記自己位置として、前記移動体の位置を推定する
請求項1に記載の自己位置推定装置。 - 前記保管設備は、前記物体を保管する複数の保管スペースを有し、
前記物体の前記保管状況情報は、前記複数の保管スペースのそれぞれの位置情報および前記複数の保管スペースのそれぞれに保管されている前記物体の数の情報を含む
請求項1に記載の自己位置推定装置。 - 前記保管設備は、前記物体を保管する複数の保管スペースを有し、
前記物体の前記保管状況情報は、前記複数の保管スペースのそれぞれの位置情報および前記複数の保管スペースのそれぞれに保管されている前記物体の数の情報を含む
請求項2に記載の自己位置推定装置。 - 自動運転車両であって、
請求項1~4いずれか1項に記載の自己位置推定装置と、
前記自動運転車両を移動させる移動機構部と、
前記自己位置推定装置で推定された自己位置に基づいて前記自動運転車両が所定の経路上を移動するように前記移動機構部を制御する走行制御部と、
を備えた自動運転車両。 - 物体の形状情報および保管設備内における前記物体の保管状況情報に基づいて生成された前記保管設備内の地図情報を取得することと、
周囲の環境情報を取得することと、
取得した前記地図情報および前記環境情報に基づいて自己位置を推定することと、
を備えた自己位置推定方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202280069892.3A CN118103789A (zh) | 2021-11-04 | 2022-10-27 | 自身位置推定装置、自动驾驶车辆以及自身位置推定方法 |
| EP22889882.1A EP4428646A4 (en) | 2021-11-04 | 2022-10-27 | OWN POSITION ESTIMATION DEVICE, AUTONOMOUS VEHICLE AND OWN POSITION ESTIMATION METHOD |
| JP2023557992A JP7732517B2 (ja) | 2021-11-04 | 2022-10-27 | 自己位置推定装置、自動運転車両、および自己位置推定方法 |
| US18/643,238 US20240272642A1 (en) | 2021-11-04 | 2024-04-23 | Self-location estimation device, autonomous driving vehicle, and self-location estimation method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021-180096 | 2021-11-04 | ||
| JP2021180096 | 2021-11-04 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US18/643,238 Continuation US20240272642A1 (en) | 2021-11-04 | 2024-04-23 | Self-location estimation device, autonomous driving vehicle, and self-location estimation method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023080062A1 true WO2023080062A1 (ja) | 2023-05-11 |
Family
ID=86241146
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/040246 Ceased WO2023080062A1 (ja) | 2021-11-04 | 2022-10-27 | 自己位置推定装置、自動運転車両、および自己位置推定方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20240272642A1 (ja) |
| EP (1) | EP4428646A4 (ja) |
| JP (1) | JP7732517B2 (ja) |
| CN (1) | CN118103789A (ja) |
| WO (1) | WO2023080062A1 (ja) |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005001832A (ja) * | 2003-06-12 | 2005-01-06 | Matsushita Electric Ind Co Ltd | 倉庫状況管理装置およびその方法 |
| JP2009169845A (ja) | 2008-01-18 | 2009-07-30 | Toyota Motor Corp | 自律移動ロボット及び地図更新方法 |
| JP2010023950A (ja) * | 2008-07-16 | 2010-02-04 | Hitachi Ltd | 3次元物体認識システム及びそれを用いた棚卸システム |
| JP2015171933A (ja) * | 2014-03-12 | 2015-10-01 | 株式会社豊田自動織機 | 無人搬送車と在庫管理システムの連動システムにおける地図情報更新方法 |
| JP2020527810A (ja) * | 2019-04-04 | 2020-09-10 | シャンハイ クイックトロン インテリジェント テクノロジー カンパニー リミテッドShanghai Quicktron Intelligent Technology Co., Ltd | ナビゲーション制御方法、スマート倉庫システム及び無人搬送車 |
| JP2020172400A (ja) * | 2019-04-14 | 2020-10-22 | 炬星科技(深▲せん▼)有限公司Syrius Robotics Co., Ltd. | 倉庫高速配置方法、機器及び記憶媒体 |
| JP2020194300A (ja) * | 2019-05-27 | 2020-12-03 | 中国電力株式会社 | 物品管理システム |
| JP2021180096A (ja) | 2020-05-13 | 2021-11-18 | 株式会社ダイセル | 二次電池用セパレータ |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006282386A (ja) * | 2005-03-31 | 2006-10-19 | Mitsui Eng & Shipbuild Co Ltd | コンテナヤードにおける設備の配置構造 |
| CN107922119B (zh) * | 2015-11-25 | 2020-05-29 | 株式会社日立制作所 | 货架配置系统、搬运机器人以及货架配置方法 |
| JP6751603B2 (ja) | 2016-06-24 | 2020-09-09 | 株式会社Ihiエアロスペース | コンテナターミナルシステム |
| DE102019207870A1 (de) * | 2019-05-29 | 2020-12-03 | Robert Bosch Gmbh | Verfahren zur Erstellung einer Umgebungskarte für die Verwendung bei der autonomen Navigation eines mobilen Roboters |
| JP7350671B2 (ja) * | 2020-02-25 | 2023-09-26 | 三菱重工業株式会社 | 位置推定装置、制御装置、産業用車両、物流支援システム、位置推定方法およびプログラム |
-
2022
- 2022-10-27 CN CN202280069892.3A patent/CN118103789A/zh active Pending
- 2022-10-27 EP EP22889882.1A patent/EP4428646A4/en active Pending
- 2022-10-27 JP JP2023557992A patent/JP7732517B2/ja active Active
- 2022-10-27 WO PCT/JP2022/040246 patent/WO2023080062A1/ja not_active Ceased
-
2024
- 2024-04-23 US US18/643,238 patent/US20240272642A1/en active Pending
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005001832A (ja) * | 2003-06-12 | 2005-01-06 | Matsushita Electric Ind Co Ltd | 倉庫状況管理装置およびその方法 |
| JP2009169845A (ja) | 2008-01-18 | 2009-07-30 | Toyota Motor Corp | 自律移動ロボット及び地図更新方法 |
| JP2010023950A (ja) * | 2008-07-16 | 2010-02-04 | Hitachi Ltd | 3次元物体認識システム及びそれを用いた棚卸システム |
| JP2015171933A (ja) * | 2014-03-12 | 2015-10-01 | 株式会社豊田自動織機 | 無人搬送車と在庫管理システムの連動システムにおける地図情報更新方法 |
| JP2020527810A (ja) * | 2019-04-04 | 2020-09-10 | シャンハイ クイックトロン インテリジェント テクノロジー カンパニー リミテッドShanghai Quicktron Intelligent Technology Co., Ltd | ナビゲーション制御方法、スマート倉庫システム及び無人搬送車 |
| JP2020172400A (ja) * | 2019-04-14 | 2020-10-22 | 炬星科技(深▲せん▼)有限公司Syrius Robotics Co., Ltd. | 倉庫高速配置方法、機器及び記憶媒体 |
| JP2020194300A (ja) * | 2019-05-27 | 2020-12-03 | 中国電力株式会社 | 物品管理システム |
| JP2021180096A (ja) | 2020-05-13 | 2021-11-18 | 株式会社ダイセル | 二次電池用セパレータ |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4428646A4 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7732517B2 (ja) | 2025-09-02 |
| EP4428646A1 (en) | 2024-09-11 |
| EP4428646A4 (en) | 2025-04-09 |
| US20240272642A1 (en) | 2024-08-15 |
| CN118103789A (zh) | 2024-05-28 |
| JPWO2023080062A1 (ja) | 2023-05-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2752725B1 (en) | Augmented mobile platform localization | |
| CA3076533C (en) | Multi-resolution scan matching with exclusion zones | |
| AU2020216392B2 (en) | Robot dwell time minimization in warehouse order fulfillment operations | |
| US10222808B2 (en) | Inspection system and method for performing inspections in a storage facility | |
| US12475592B2 (en) | Positioning apparatus capable of measuring position of moving body using image capturing apparatus | |
| US8655588B2 (en) | Method and apparatus for providing accurate localization for an industrial vehicle | |
| EP3904992A1 (en) | Positioning device and mobile body | |
| JP6751603B2 (ja) | コンテナターミナルシステム | |
| JP2021160931A (ja) | 荷役システム | |
| JP7244292B2 (ja) | 基地局選択装置と基地局選択方法 | |
| JP7732517B2 (ja) | 自己位置推定装置、自動運転車両、および自己位置推定方法 | |
| US12327309B2 (en) | Systems and methods for area wide object dimensioning | |
| US20250230023A1 (en) | Validating the pose of a robotic vehicle that allows it to interact with an object on fixed infrastructure | |
| JP2020160018A (ja) | 船舶の積載物の数量検収システム | |
| JP7565127B1 (ja) | 運搬車両の誘導方法及び誘導装置 | |
| JP2023101086A (ja) | 荷役システム | |
| US20250292501A1 (en) | Systems and methods for area wide object dimensioning | |
| KR102939681B1 (ko) | Non-GPS 환경 UWB 통신 기반 이종 로봇 군집용 측위 및 위치 제어 시스템 | |
| EP4488785B1 (en) | Autonomous or assisted driving of an industrial truck using the detection of a plurality of markers | |
| US12506538B2 (en) | Free-space optical communication control system, free-space optical communication control apparatus, and free-space optical communication control method | |
| US12461526B2 (en) | Autonomous mobile body control device, autonomous mobile body, and autonomous mobile body control method | |
| CN120191849A (zh) | 一种车辆对位方法及跨运车 | |
| JP2024055422A (ja) | 移動体及び移動体の運転支援装置 | |
| CN116678397A (zh) | 桥梁病害多机器人协同检测方法、装置、设备及存储介质 | |
| CN113391337A (zh) | 搬运设备定位系统和方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22889882 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2023557992 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202280069892.3 Country of ref document: CN |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 11202402741S Country of ref document: SG |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2022889882 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2022889882 Country of ref document: EP Effective date: 20240604 |