WO2023112457A1 - 把持装置 - Google Patents
把持装置 Download PDFInfo
- Publication number
- WO2023112457A1 WO2023112457A1 PCT/JP2022/038430 JP2022038430W WO2023112457A1 WO 2023112457 A1 WO2023112457 A1 WO 2023112457A1 JP 2022038430 W JP2022038430 W JP 2022038430W WO 2023112457 A1 WO2023112457 A1 WO 2023112457A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- fluid pressure
- actuator
- gripping device
- pressure actuator
- soft member
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/08—Gripping heads and other end effectors having finger members
- B25J15/12—Gripping heads and other end effectors having finger members with flexible finger members
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/0009—Gripping heads and other end effectors comprising multi-articulated fingers, e.g. resembling a human hand
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/0023—Gripper surfaces directly activated by a fluid
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/08—Gripping heads and other end effectors having finger members
- B25J15/10—Gripping heads and other end effectors having finger members with three or more finger members
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B15/00—Fluid-actuated devices for displacing a member from one position to another; Gearing associated therewith
- F15B15/08—Characterised by the construction of the motor unit
- F15B15/10—Characterised by the construction of the motor unit the motor being of diaphragm type
Definitions
- the present disclosure relates to a grasping device using a hydraulic actuator that bends (curls) when contracted.
- McKibben type a structure having a rubber tube that expands and contracts by air pressure and a sleeve that covers the outer peripheral surface of the tube. It is
- Patent Literature 1 discloses a gripping device that grips an object (which may be called a work) by using a plurality of such fluid pressure actuators.
- the gripping device using the fluid pressure actuator as described above has the following problems. Specifically, depending on the shape, size, etc. of the object, such as when the object is spherical or irregular, the object may not be grasped well by the curled fluid pressure actuator.
- the following disclosure has been made in view of such circumstances, and aims to provide a grasping device that can more reliably grasp an object while using a fluid pressure actuator that bends (curls) when contracted. .
- One aspect of the present disclosure is a gripping device (for example, gripping device 1) using a plurality of fluid pressure actuators (fluid pressure actuators 10) that bend when contracted, wherein the fluid pressure actuators are flexible soft actuators.
- the fluid pressure actuators are provided such that when each of the fluid pressure actuators contracts, the tip end portion (tip end portion 300) of the fluid pressure actuator comes close to the tip end portion of the other fluid pressure actuators, and the plurality of the A soft member (soft member 30) is provided in a space on the side of the base end (base end portion 200) of the fluid pressure actuator, which is surrounded by the fluid pressure actuator.
- FIG. 1 is a perspective view of the gripping device 1 in operation.
- 2(a) and 2(b) are a single perspective view and an exploded perspective view of the gripping device 1.
- FIG. FIG. 3 is a side view of the hydraulic actuator 10.
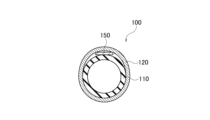
- FIG. 4 is a cross-sectional view of the actuator main body 100 along the radial direction DR .
- FIG. 5 is an explanatory diagram of the behavior of the fluid pressure actuator 10.
- FIG. 6(a) and 6(b) are diagrams showing an operation example of the gripping device 1.
- FIG. FIG. 7 is a perspective view of the gripping device 1A. 8(a), (b) and (c) are a side view and a bottom view of a gripping device 1B according to a modification.
- FIG. 1 is a perspective view of a gripping device 1 according to the present embodiment during operation.
- 2(a) and 2(b) are a single perspective view and an exploded perspective view of the gripping device 1.
- FIG. 1 is a perspective view of a gripping device 1 according to the present embodiment during operation.
- 2(a) and 2(b) are a single perspective view and an exploded perspective view of the gripping device 1.
- FIG. 1 is a perspective view of a gripping device 1 according to the present embodiment during operation.
- 2(a) and 2(b) are a single perspective view and an exploded perspective view of the gripping device 1.
- the gripping device 1 uses a plurality of fluid pressure actuators 10 that bend (curl) when contracted.
- the gripping device 1 can grip an object W (which may be called a work) using a plurality of fluid pressure actuators 10 .
- the gripping device 1 may be used as a robot hand or the like.
- the fluid pressure actuator 10 is a bendable and flexible soft actuator.
- the gripping device 1 includes a fluid pressure actuator 10, a pedestal portion 20 and a strut portion 25.
- the pedestal 20 is supported by a strut 25 extending in the vertical direction.
- a plurality of fluid pressure actuators 10 are attached to the pedestal portion 20 .
- the base portion 20 is disk-shaped, and three fluid pressure actuators 10 are provided on the same circumference of the base portion 20 at approximately equal intervals.
- the tip 300 of the fluid pressure actuator 10 (not shown in FIGS. 1 and 2, see FIG. 3) approaches the tip 300 of the other fluid pressure actuator 10.
- the fluid pressure actuator 10 is provided so as to curve toward the gripping device 1, more specifically, toward the center of the pedestal portion 20. As shown in FIG.
- a soft member 30 is attached to the base portion 20 .
- the hemispherical soft member 30 has a ring-shaped flange portion 31 .
- the flange portion 31 is held by a holding ring 35 and fixed to the base portion 20 using screws 36 .
- the soft member 30 is provided in a space on the base end portion 200 (see FIG. 3) side of the fluid pressure actuator 10 surrounded by the plurality of fluid pressure actuators 10 . At least a portion of the soft member 30 is preferably spherical. In other words, the soft member 30 does not necessarily have a spherical shape, and may have a cubic shape or the like.
- the soft member 30 has flexibility such that when the object W is gripped by the fluid pressure actuator 10, it deforms to such an extent that it does not apply a large pressure to the object W.
- the soft member 30 can be formed using materials such as rubber and urethane, for example.
- the soft member 30 may be spongy.
- the soft member 30 has a cushioning property when the object W is gripped, and may be called a cushioning member.
- the object W is not particularly limited, but has a relatively round shape, has a certain size although it is irregular, and easily spills out of the space surrounded by the plurality of fluid pressure actuators 10, such as round vegetables and fruits. etc.
- FIG. 3 is a side view of the fluid pressure actuator 10 according to this embodiment.
- FIG. 4 is a cross-sectional view of the actuator main body 100 along the radial direction DR .
- the fluid pressure actuator 10 has an actuator main body 100, a proximal end 200 and a distal end 300.
- the actuator main body 100 is composed of a tube 110 and a sleeve 120. A fluid flows into the actuator body 100 through the connection port 211a.
- the actuator main body 100 contracts in the axial direction D AX and expands in the radial direction DR due to the inflow of fluid into the tube 110 . Further, the actuator main body 100 expands in the axial direction D AX of the actuator main body 100 and contracts in the radial direction DR due to the outflow of fluid from the tube 110 . Due to such a change in shape of the actuator main body 100, the fluid pressure actuator 10 functions as an actuator.
- a restraining member 150 (which may also be referred to as regulating or limiting, hereinafter the same) that restrains compression in the axial direction D AX is used (Fig. 3 (not shown, see FIGS. 4 and 5, etc.), it is possible to bend (curl) in the orthogonal direction orthogonal to the axial direction DAX , that is, in the radial direction DR .
- the fluid used to drive the fluid pressure actuator 10 may be either a gas such as air or a liquid such as water or mineral oil. It has high durability that can withstand even
- connection port 211a is attached with a hose (pipeline) connected to a driving pressure source for the fluid pressure actuator 10, specifically, a gas or liquid compressor.
- the fluid that has flowed in through the connection port 211a passes through a passage hole (not shown) and flows into the inside of the actuator main body 100, specifically, the inside of the tube 110. As shown in FIG.
- the tube 110 is a cylindrical body that expands and contracts due to fluid pressure.
- the tube 110 is made of an elastic material such as butyl rubber because it repeatedly contracts and expands due to the fluid.
- the fluid pressure actuator 10 is hydraulically driven, it is preferably made of at least one selected from the group consisting of NBR (nitrile rubber), chloroprene rubber, and epichlorohydrin rubber, which have high oil resistance.
- the sleeve 120 is cylindrical and covers the outer peripheral surface of the tube 110.
- the sleeve 120 is an elastic structure in which fiber cords oriented in a predetermined direction are woven, and the oriented cords intersect to repeat a rhombic shape. Having such a shape, the sleeve 120 is pantograph-deformed and follows the contraction and expansion of the tube 110 while regulating it.
- the cords forming the sleeve 120 it is preferable to use aromatic polyamide (aramid fiber) or polyethylene terephthalate (PET) fiber cords.
- aromatic polyamide aramid fiber
- PET polyethylene terephthalate
- the cord is not limited to this type of fiber cord, and may be, for example, a cord of high-strength fiber such as PBO fiber (polyparaphenylenebenzobisoxazole).
- a restraining member 150 is provided between the tube 110 and the sleeve 120.
- Restraining member 150 is not compressible in the axial direction D AX and is deformable only along the radial direction D R (which may also be referred to as the deflection direction). That is, the restraining member 150 resists compression along the axial direction D AX and is deformable in the orthogonal direction (radial direction D R ) perpendicular to the axial direction D AX .
- the restraining member 150 has a characteristic of being difficult to deform along the axial direction DAX and bending along the radial direction DR . It should be noted that “deformable” may also mean “curvable” or “curlable”.
- the restraining member 150 also has a function of restraining (restricting) the expansion of the tube 110 (and the sleeve 120) outward in the radial direction DR at the position on the outer circumference of the tube 110 where the restraining member 150 is provided. ing.
- the restraining member 150 is provided inside the sleeve 120, specifically, in a space radially inside the sleeve 120, extending from one end side to the other end side in the axial direction DAX . Also, in this embodiment, the restraining member 150 is formed using a leaf spring.
- the dimensions of the leaf spring are not particularly limited as long as they are selected according to the size of the fluid pressure actuator 10 and the required generated force.
- the material of the leaf spring is also not particularly limited, but typically, any material such as metal such as stainless steel that is easy to bend and has high resistance to compression may be used.
- the restraint member 150 may be formed of a carbon fiber reinforced plastic (CFRP) sheet or the like. Since CFRP is less likely to be plastically deformed than metal, the fluid pressure actuator 10 easily returns to its original straight state after bending.
- CFRP carbon fiber reinforced plastic
- the base end portion 200 is located on the base portion 20 side.
- the base end portion 200 is formed with the connection port 211a described above.
- the base end portion 200 may be provided with a mechanism for sealing one end portion of the actuator body portion 100 in the axial direction DAX .
- the distal end portion 300 is located on the side opposite to the base end portion 200 on the base portion 20 side.
- the distal end portion 300 may be provided with a mechanism for sealing the other end portion of the actuator body portion 100 in the axial direction DAX .
- the sealing mechanism of the actuator main body 100 provided at the proximal end 200 and the distal end 300 may be the same as that of the fluid pressure actuator disclosed in Japanese Patent Laid-Open No. 2021-088999, for example.
- FIG. 5 is an explanatory diagram of the behavior of the fluid pressure actuator 10.
- the fluid pressure actuator 10 shown in FIG. 5 is fixed on the base end 200 side and is freely movable on the tip end 300 side. That is, the proximal end 200 side is the fixed end, and the distal end 300 side is the free end.
- the restraining member 150 made of a hard member such as a leaf spring functions like a backbone, and is located on the opposite side of the tube 110 and the sleeve 120 on the outer periphery where the restraining member 150 is provided (Fig. 5). ), the dimension of the hydraulic actuator 10 in the axial direction D AX is shortened by expanding outward in the radial direction D R , and the hydraulic actuator 10 (specifically, the actuator body 100) bends.
- the direction D1 may also be called a flexible direction.
- a mark M (see FIG. 3) may be provided to indicate the position where the restraining member 150 is provided in order to make it easier to recognize that the fluid pressure actuator 10 is bent in the direction D1.
- the restraint member 150 is provided between the rubber tube 110 and the sleeve 120, resists compression in the axial direction DAX , and is deformable along the orthogonal direction (radial direction DR ) perpendicular to the and arranged in a part of the actuator main body 100 in the circumferential direction.
- the restraining member 150 has a high compressive rigidity, so that the restraining force is reduced.
- the portion where the member 150 is arranged cannot contract.
- other portions of the actuator main body 100 try to contract, so that a force in the bending direction along the orthogonal direction (radial direction D R ) is generated and bends with the restraint member 150 as the back surface.
- FIGS. 6A and 6B show an example of the operation of the gripping device 1.
- FIG. Specifically, FIGS. 6A and 6B show a side view and a bottom view of the gripping device 1 gripping the object W.
- the gripping device 1 uses a plurality of fluid pressure actuators 10 to grip a plurality of spherical objects W at the same time.
- the soft member 30 has a softness (flexibility) that does not damage the object W (for example, vegetables or fruits) and can firmly support the object W.
- FIG. 7 is a perspective view of a gripping device 1A according to a modification.
- the gripping device 1A does not have a disk-shaped pedestal 20, but includes a pedestal on which the fluid pressure actuator 10 is attached and a pillar pedestal 21 in which a pedestal supporting the pedestal is integrated.
- the support pedestal portion 21 is three-dimensionally formed compared to the pedestal portion 20 and has a shape capable of three-dimensionally holding the spherical soft member 30 .
- the pedestal and the support supporting the pedestal can be integrated, and the soft member 30 can also be three-dimensionally held by the support pedestal portion 21, so there are advantages such as a reduction in the number of parts.
- Figures 8(a), (b) and (c) are a side view and a bottom view of a gripping device 1B according to a modification.
- a contractible and expandable bag-like body is used as the soft member.
- an airbag 30A that can be deflated and inflated by taking in and out gas such as air is used.
- a gas supply hose (not shown) or the like may be connected to the hemispherical airbag 30A.
- the airbag 30A has a flange portion 32.
- a holding portion 22 corresponding to the flange portion 32 is provided on the pedestal portion 20A.
- the holding portion 22 can detachably hold the flange portion 32 .
- holding portions 22 are provided at three locations on the same circumference as the outer circumference that engage with flange portions 32 provided at three locations on the outer circumference of the airbag 30A.
- the flange portion 32 is hooked to the holding portion 22, and the airbag 30A is held.
- the gripping device 1B is configured to detachably hold the flange portion 32 of the airbag 30A. may be configured to be detachably held by
- the space on the base end portion 200 side of the fluid pressure actuator 10 surrounded by the plurality of fluid pressure actuators 10 is provided with a soft member at least partially spherical. Therefore, even if the object is spherical or irregular in shape, size, etc., the soft member can push the object back toward the fluid pressure actuator 10 with an appropriate pressure.
- the curled fluid pressure actuator 10 can successfully and stably grip the object. That is, according to the gripping device described above, it is possible to more reliably grip the object while using the fluid pressure actuator that bends (curls) when contracted.
- the soft member may be a deflateable and inflatable bag like the airbag 30A. Adopting such an airbag 30A makes it possible to deal with more types of objects.
- the flexible member may have a flange portion, and the flange portion may be detachably held by the gripping device.
- the soft member has a hemispherical shape, but it may not necessarily have a hemispherical shape.
- the soft member may be ellipsoidal as long as it has a rounded shape with no corners.
- the restraint member 150 is used to ensure the flexibility of the fluid pressure actuator, but the flexibility of the fluid pressure actuator may be ensured by another structure. For example, by providing a flexible frame partly bellows-shaped around the fluid pressure actuator, when the fluid pressure actuator contracts, the fluid pressure actuator may be bent with the bellows portion inside. .
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- General Engineering & Computer Science (AREA)
- Actuator (AREA)
- Manipulator (AREA)
Abstract
Description
図1は、本実施形態に係る把持装置1の動作時の斜視図である。図2(a)及び(b)は、把持装置1の単体斜視図及び分解斜視図である。
図3は、本実施形態に係る流体圧アクチュエータ10の側面図である。図4は、アクチュエータ本体部100の径方向DRに沿った断面図である。
図5は、流体圧アクチュエータ10の挙動の説明図である。図5に示されている流体圧アクチュエータ10は、基端部200側が固定されており、先端部300側は自由に移動できる状態である。つまり、基端部200側が固定端であり、先端部300側が自由端である。
図6(a)及び(b)は、把持装置1の動作例を示す。具体的には、図6(a)及び(b)は、対象物Wを把持した把持装置1の側面図及び底面図を示す。
次に、把持装置1の変更例について説明する。図7は、変更例に係る把持装置1Aの斜視図である。把持装置1Aは、把持装置1と比較すると、円盤状の台座部20ではなく、流体圧アクチュエータ10が取り付けられる台座と、台座を支持する支柱とが一体化された支柱台座部21を備える。
上述した実施形態によれば、以下の作用効果が得られる。具体的には、上述した把持装置では、複数の流体圧アクチュエータ10によって囲まれる流体圧アクチュエータ10の基端部200側の空間には、少なくとも一部が球体状の軟質部材が設けられる。このため、対象物が球状或いは不定形である場合など、対象物の形状、大きさなどが異なる場合でも、軟質部材が対象物を適当な圧力で流体圧アクチュエータ10側に押し返すことができる。
以上、実施形態について説明したが、当該実施形態の記載に限定されるものではなく、種々の変形及び改良が可能であることは、当業者には自明である。
10 流体圧アクチュエータ
20, 20A 台座部
21 支柱台座部
22 保持部
25 支柱部
30 軟質部材
30A エアバッグ
31, 32 フランジ部
35 保持リング
36 ビス
100 アクチュエータ本体部
110 チューブ
120 スリーブ
150 拘束部材
200 基端部
211a 接続口
300 先端部
W 対象物
Claims (6)
- 収縮時に湾曲する流体圧アクチュエータを複数用いた把持装置であって、
前記流体圧アクチュエータは、柔軟性を有するソフトアクチュエータであり、
前記流体圧アクチュエータは、前記流体圧アクチュエータそれぞれが収縮すると、前記流体圧アクチュエータの先端部が他の前記流体圧アクチュエータと先端部と接近するように設けられ、
複数の前記流体圧アクチュエータによって囲まれる前記流体圧アクチュエータの基端部側の空間には、軟質部材が設けられる把持装置。 - 前記軟質部材は、少なくとも一部が球体状である請求項1に記載の把持装置。
- 前記流体圧アクチュエータは、
流体の圧力によって膨張及び収縮する円筒状のチューブと、
所定方向に配向された繊維コードを編み込んだ伸縮性を有する構造体であり、前記チューブの外周面を覆うスリーブと
を含む請求項1または2に記載の把持装置。 - 前記軟質部材は、収縮及び膨張可能な袋状体である請求項1乃至3の何れか一項に記載の把持装置。
- 前記軟質部材は、フランジ部を有し、
前記把持装置は、前記フランジ部を着脱可能に保持する保持部を備える請求項1乃至4の何れか一項に記載の把持装置。 - 前記流体圧アクチュエータは、前記スリーブの内側において、前記チューブの軸方向における一端側から他端側に亘って設けられる拘束部材を備える請求項3に記載の把持装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202280082182.4A CN118382758A (zh) | 2021-12-17 | 2022-10-14 | 把持装置 |
| EP22906992.7A EP4450831A4 (en) | 2021-12-17 | 2022-10-14 | GRIPPING DEVICE |
| US18/720,081 US20250153371A1 (en) | 2021-12-17 | 2022-10-14 | Grasping device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021205501A JP2023090518A (ja) | 2021-12-17 | 2021-12-17 | 把持装置 |
| JP2021-205501 | 2021-12-17 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023112457A1 true WO2023112457A1 (ja) | 2023-06-22 |
Family
ID=86774399
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/038430 Ceased WO2023112457A1 (ja) | 2021-12-17 | 2022-10-14 | 把持装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20250153371A1 (ja) |
| EP (1) | EP4450831A4 (ja) |
| JP (1) | JP2023090518A (ja) |
| CN (1) | CN118382758A (ja) |
| WO (1) | WO2023112457A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN119952745B (zh) * | 2025-02-21 | 2025-10-24 | 浙江大学 | 一种构型可变的水下抗粘滞软体抓手和抓取方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005144759A (ja) * | 2003-11-12 | 2005-06-09 | Toyota Motor Corp | 把持装置 |
| JP2017113853A (ja) * | 2015-12-25 | 2017-06-29 | 富士通株式会社 | ロボットハンドおよびケーブル手繰り方法 |
| JP2020518478A (ja) * | 2017-05-01 | 2020-06-25 | ソフト ロボティクス, インコーポレイテッド | ロボットエンドエフェクタのための構造 |
| JP2021088999A (ja) | 2019-12-02 | 2021-06-10 | 株式会社ブリヂストン | 流体圧アクチュエータ |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111319060B (zh) * | 2020-03-03 | 2021-03-26 | 清华大学 | 一种软体机器人抓持装置及抓持方法 |
| CN113021394B (zh) * | 2021-03-31 | 2025-04-29 | 广东工业大学 | 一种手掌具有跨模态触觉传感功能的气动软体多指手 |
-
2021
- 2021-12-17 JP JP2021205501A patent/JP2023090518A/ja active Pending
-
2022
- 2022-10-14 CN CN202280082182.4A patent/CN118382758A/zh active Pending
- 2022-10-14 WO PCT/JP2022/038430 patent/WO2023112457A1/ja not_active Ceased
- 2022-10-14 EP EP22906992.7A patent/EP4450831A4/en active Pending
- 2022-10-14 US US18/720,081 patent/US20250153371A1/en active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005144759A (ja) * | 2003-11-12 | 2005-06-09 | Toyota Motor Corp | 把持装置 |
| JP2017113853A (ja) * | 2015-12-25 | 2017-06-29 | 富士通株式会社 | ロボットハンドおよびケーブル手繰り方法 |
| JP2020518478A (ja) * | 2017-05-01 | 2020-06-25 | ソフト ロボティクス, インコーポレイテッド | ロボットエンドエフェクタのための構造 |
| JP2021088999A (ja) | 2019-12-02 | 2021-06-10 | 株式会社ブリヂストン | 流体圧アクチュエータ |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4450831A4 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20250153371A1 (en) | 2025-05-15 |
| EP4450831A4 (en) | 2025-03-19 |
| JP2023090518A (ja) | 2023-06-29 |
| EP4450831A1 (en) | 2024-10-23 |
| CN118382758A (zh) | 2024-07-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2021088999A (ja) | 流体圧アクチュエータ | |
| WO2023112457A1 (ja) | 把持装置 | |
| WO2023171111A1 (ja) | ロボットハンド | |
| JP7349338B2 (ja) | 流体圧アクチュエータ | |
| EP4455490B1 (en) | Gripping device | |
| WO2023171110A1 (ja) | 流体圧アクチュエータ | |
| EP4450832A1 (en) | Gripping device | |
| JP2023091136A (ja) | 把持装置 | |
| WO2023171112A1 (ja) | カバー付き流体圧アクチュエータ | |
| TWI848432B (zh) | 機器人致動器及其配置方法 | |
| WO2007058085A1 (ja) | 流体圧式アクチュエータ | |
| JP2023091339A (ja) | 把持装置 | |
| JP2023131052A (ja) | ロボットハンド | |
| JP2023090572A (ja) | 流体圧アクチュエータおよびロボットハンド | |
| JP2023090537A (ja) | 流体圧アクチュエータ | |
| CN112976031B (zh) | 气动柔性驱动器及网捕式气动抓取装置 | |
| JP7487870B2 (ja) | アクチュエータ | |
| WO2024219111A1 (ja) | 流体圧アクチュエータおよびアタッチメント | |
| JP2023090524A (ja) | 流体圧アクチュエータ | |
| JP2023090570A (ja) | アクチュエータカバー付き保持部材及びアクチュエータカバー | |
| JP2023090536A (ja) | 流体圧アクチュエータ | |
| JP2023090571A (ja) | 流体圧アクチュエータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22906992 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202280082182.4 Country of ref document: CN |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 18720081 Country of ref document: US |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2022906992 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2022906992 Country of ref document: EP Effective date: 20240717 |
|
| WWP | Wipo information: published in national office |
Ref document number: 18720081 Country of ref document: US |