WO2023223907A1 - 情報処理方法、情報処理装置、及びプログラム - Google Patents
情報処理方法、情報処理装置、及びプログラム Download PDFInfo
- Publication number
- WO2023223907A1 WO2023223907A1 PCT/JP2023/017549 JP2023017549W WO2023223907A1 WO 2023223907 A1 WO2023223907 A1 WO 2023223907A1 JP 2023017549 W JP2023017549 W JP 2023017549W WO 2023223907 A1 WO2023223907 A1 WO 2023223907A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- information
- autonomous mobile
- remote
- vehicle
- mobile bodies
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images








Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/22—Command input arrangements
- G05D1/221—Remote-control arrangements
- G05D1/227—Handing over between remote control and on-board control; Handing over between remote control arrangements
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/22—Command input arrangements
- G05D1/221—Remote-control arrangements
- G05D1/222—Remote-control arrangements operated by humans
- G05D1/224—Output arrangements on the remote controller, e.g. displays, haptics or speakers
- G05D1/2244—Optic
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/69—Coordinated control of the position or course of two or more vehicles
- G05D1/698—Control allocation
- G05D1/6987—Control allocation by centralised control off-board any of the vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16Y—INFORMATION AND COMMUNICATION TECHNOLOGY SPECIALLY ADAPTED FOR THE INTERNET OF THINGS [IoT]
- G16Y10/00—Economic sectors
- G16Y10/40—Transportation
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16Y—INFORMATION AND COMMUNICATION TECHNOLOGY SPECIALLY ADAPTED FOR THE INTERNET OF THINGS [IoT]
- G16Y40/00—IoT characterised by the purpose of the information processing
- G16Y40/30—Control
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2105/00—Specific applications of the controlled vehicles
- G05D2105/20—Specific applications of the controlled vehicles for transportation
- G05D2105/22—Specific applications of the controlled vehicles for transportation of humans
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2107/00—Specific environments of the controlled vehicles
- G05D2107/10—Outdoor regulated spaces
- G05D2107/13—Spaces reserved for vehicle traffic, e.g. roads, regulated airspace or regulated waters
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2109/00—Types of controlled vehicles
- G05D2109/10—Land vehicles
Definitions
- the present disclosure relates to an information processing method, an information processing device, and a program for remotely monitoring multiple autonomous vehicles.
- the present invention includes a device, a margin calculation section that calculates an operator intervention margin indicating the possibility that an operator can intervene in the control of the vehicle, and an instruction section that transmits an instruction regarding the control of the vehicle to the vehicle via a communication device.
- Patent Document 1 discloses that, when the operator intervention margin is less than or equal to a predetermined value, the instruction unit transmits an instruction to change the travel plan of the vehicle to the vehicle.
- the present disclosure aims to provide an information processing method that can reduce the burden on operators.
- An information processing method is an information processing method in an information processing apparatus, wherein first information regarding the two or more autonomous mobile bodies is acquired for each of the two or more autonomous mobile bodies; estimating second information indicating the number of target autonomous mobile bodies for which operation or monitoring by a remote operator is to be started among the two or more autonomous mobile bodies in a predetermined period based on the first information; and if it is determined that the second information is equal to or greater than a predetermined value, control one or more of the two or more target autonomous mobile bodies. and fourth information for notifying the remote operator.
- the information processing device includes, for each of the two or more autonomous mobile bodies, an acquisition unit that acquires first information regarding the two or more autonomous mobile bodies, and a predetermined information processing unit based on the first information.
- an estimation unit that estimates second information indicating the number of target autonomous mobile bodies for which operation or monitoring by a remote operator is to be started among the two or more autonomous mobile bodies, and the second information is equal to or greater than a predetermined value;
- a determination unit that determines whether or not the second information is equal to or greater than a predetermined value;
- an output unit that outputs at least one of third information for notifying the remote operator, and fourth information for notifying the remote operator.
- the program acquires, for each of the two or more autonomous mobile bodies, first information regarding the two or more autonomous mobile bodies, and based on the first information, the Estimating second information indicating the number of target autonomous mobile bodies for which operation or monitoring by a remote operator is to be started among the two or more autonomous mobile bodies, and determining whether the second information is greater than or equal to a predetermined value. , if it is determined that the second information is equal to or greater than a predetermined value, third information for controlling one or more of the two or more target autonomous mobile bodies, and the remote operator;
- This is a program for a computer to execute an information processing method that outputs at least one of the fourth information for making a notification.
- the burden on the operator can be reduced.
- FIG. 1 is a block diagram illustrating an example of a control system in an embodiment of the present disclosure.
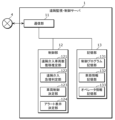
- FIG. 2 is a block diagram showing an example of the remote monitoring/control server shown in FIG. 1.
- FIG. 2 is a block diagram showing an example of the automatic driving vehicle shown in FIG. 1.
- FIG. FIG. 2 is a block diagram showing an example of the remote operator terminal shown in FIG. 1.
- FIG. 2 is an explanatory diagram showing an example of vehicle information acquired by the remote monitoring/control server shown in FIG. 1.
- FIG. 6 is an explanatory diagram showing an example of remote intervention information in the example shown in FIG. 5.
- FIG. 6 is an explanatory diagram showing an example of determining whether there is a sudden increase in remote intervention in the example shown in FIG. 5.
- FIG. 6 is an explanatory diagram illustrating an example of vehicle control determination for avoiding a sudden increase in remote intervention in the example illustrated in FIG. 5; 2 is a flowchart showing an example of remote intervention rapid increase avoidance processing by the remote monitoring/control server shown in FIG. 1.
- FIG. 6 is an explanatory diagram illustrating an example of vehicle control determination for avoiding a sudden increase in remote intervention in the example illustrated in FIG. 5; 2 is a flowchart showing an example of remote intervention rapid increase avoidance processing by the remote monitoring/control server shown in FIG. 1.
- the automatic driving vehicle is automatically operated so as to shift the time when the remote intervention of the autonomous vehicle occurs Send control instructions.
- the frequency of situations in which multiple remote intervention request alerts occur, or situations in which it is necessary to decide the response of multiple autonomous vehicles in a short period of time thereby reducing the burden on the operator. Can be done.
- an information processing method is an information processing method in an information processing apparatus, which comprises: acquiring first information regarding the two or more autonomous mobile bodies, for each of the two or more autonomous mobile bodies; Based on the first information, estimate second information indicating the number of target autonomous mobile bodies for which operation or monitoring by a remote operator is to be started among the two or more autonomous mobile bodies in a predetermined period; is greater than or equal to a predetermined value, and if it is determined that the second information is greater than or equal to the predetermined value, one or more of the two or more target autonomous mobile bodies are At least one of third information for controlling and fourth information for notifying the remote operator is output.
- driving plan instructions to avoid the sudden increase are created as third information, and the created instructions are sent to autonomous vehicles (e.g., self-driving vehicles). Send to. Therefore, a sudden increase in remote intervention (operation or monitoring) is avoided, which can be avoided in situations where multiple alerts requesting remote intervention occur and where the response of multiple autonomous vehicles needs to be determined in a short period of time. The frequency of occurrence can be reduced. Therefore, the burden on remote operators caused by the rapid increase in remote interventions can be reduced.
- fourth information that alerts the remote operator is output to the terminal operated by the remote operator, and the remote operator is informed in advance of the timing of a sudden increase in the number of autonomous mobile objects that require remote intervention by the remote operator. Be notified. According to this, the remote operator can prepare in advance to respond to a sudden increase in the number of remote interventions. Therefore, according to the information processing method according to one aspect of the present disclosure, it is possible to reduce the burden on remote operators caused by the rapid increase in remote interventions.
- the first information may include (1) fifth information regarding the state and surrounding environment of the autonomous mobile body, (2) sixth information regarding the area in which the autonomous mobile body moves, and (3) the autonomous movement. It includes at least one of the seventh information regarding the route along which the body moves.
- the fourth information can be estimated with high accuracy.
- the second information when it is determined that the second information is equal to or greater than a predetermined value, it is further determined based on the first information whether or not a predetermined control can be executed on the target autonomous mobile body.
- the output of at least one of the third information and the fourth information when it is determined that the predetermined control can be executed on one or more of the target autonomous mobile bodies, the third information is output to one or more of the target autonomous mobile bodies. If it is determined that it is not possible to perform predetermined control on one or more of the target autonomous mobile bodies, the fourth information is output to a terminal for notifying the remote operator.
- an autonomous mobile body is able to execute a predetermined control such as a temporary stop
- a predetermined control such as a temporary stop
- the rapid increase in the number of autonomous mobile bodies that require remote intervention can be suppressed. can be done.
- certain controls such as temporary stopping may not be possible.
- fourth information that alerts the remote operator is output to the terminal operated by the remote operator, and the remote operator can notify the remote operator of the timing of a rapid increase in the number of autonomous vehicles that require remote intervention.
- the operator will be notified in advance. According to this, the remote operator can prepare in advance to respond to a sudden increase in the number of remote interventions. Therefore, the burden on remote operators due to the rapid increase in remote interventions can be reduced.
- the information processing method further includes acquiring eighth information regarding the remote operator, and determining which of the two or more remote operators is selected based on the second information. Then, ninth information is generated indicating the result of determining whether to operate or monitor the two or more target autonomous mobile bodies, and the ninth information is output to a terminal for notifying the remote operator.
- the third information may include at least one of information that causes the target autonomous mobile body to temporarily stop, information that causes the target autonomous mobile body to change speed, and information that causes the target autonomous mobile body to change a moving route. Contains either.
- the information processing method further includes determining, based on the first information, a degree of safety when the target autonomous mobile body executes a predetermined control for each of the two or more target autonomous mobile bodies; Generating tenth information indicating a result of calculating at least one of the degrees of influence on the two or more autonomous mobile bodies when the target autonomous mobile body executes the predetermined control, and based on the tenth information Then, one or more target autonomous mobile bodies are determined.
- the autonomous mobile body can safely perform predetermined control.
- the time during which the system is temporarily stopped due to a sudden increase in remote intervention can be reduced.
- a target autonomous mobile body with a high calculated safety degree is determined as the one or more target autonomous mobile bodies among the two or more target autonomous mobile bodies.
- a target autonomous mobile body having a lower calculated degree of influence among the two or more target autonomous mobile bodies is determined as the one or more target autonomous mobile bodies.
- the effects of the predetermined control, such as travel delays, when considering two or more autonomous mobile bodies as a whole can be reduced.
- the fourth information includes at least one of information indicating the predetermined period and information regarding the third information.
- the remote operator can grasp the timing at which remote intervention increases rapidly or the type of travel the autonomous mobile body will perform.
- the information processing device includes, for each of the two or more autonomous mobile bodies, an acquisition unit that acquires first information regarding the two or more autonomous mobile bodies, and a predetermined information processing unit based on the first information.
- an estimation unit that estimates second information indicating the number of target autonomous mobile bodies for which operation or monitoring by a remote operator is to be started among the two or more autonomous mobile bodies, and the second information is equal to or greater than a predetermined value;
- a determination unit that determines whether or not the second information is equal to or greater than a predetermined value;
- an output unit that outputs at least one of third information for notifying the remote operator, and fourth information for notifying the remote operator.
- the program acquires, for each of the two or more autonomous mobile bodies, first information regarding the two or more autonomous mobile bodies, and based on the first information, the Estimating second information indicating the number of target autonomous mobile bodies for which operation or monitoring by a remote operator is to be started among the two or more autonomous mobile bodies, and determining whether the second information is greater than or equal to a predetermined value. , if it is determined that the second information is equal to or greater than a predetermined value, third information for controlling one or more of the two or more target autonomous mobile bodies, and the remote operator;
- This is a program for a computer to execute an information processing method that outputs at least one of the fourth information for making a notification.
- FIG. 1 is a block diagram illustrating an example of the configuration of a control system in an embodiment of the present disclosure.
- the control system in the embodiment is a remote control system that remotely intervenes, such as monitoring or operating, as necessary, with respect to an autonomous moving body such as an autonomous vehicle.
- the control system in the embodiment includes a remote monitoring/control server 1, a plurality of automatically driven vehicles 21 to 2i, and a plurality of remote operator terminals 31 to 3j.
- i is, for example, an arbitrary integer of 2 or more.
- j is, for example, an arbitrary positive integer.
- control system includes a plurality of automatic driving vehicles 21 to 2i and a plurality of remote operator terminals 31 to 3j, but the control system is not particularly limited to this example.
- the control system may use, for example, a single remote operator terminal.
- an autonomous vehicle will be described using an autonomous vehicle as an example, but the invention is not particularly limited to this example.
- the autonomous mobile object may be a variety of autonomously moving mobile objects such as a construction machine, a ship, or a drone.
- the remote monitoring and control server 1, the plurality of automatic driving vehicles 21 to 2i, and the plurality of remote operator terminals 31 to 3j are connected via a network 4 such as the Internet, a predetermined wired network such as a dedicated line, or a predetermined wireless network, are connected to each other so that they can communicate with each other.
- a network 4 such as the Internet
- a predetermined wired network such as a dedicated line, or a predetermined wireless network
- the remote monitoring/control server 1 is, for example, a computer composed of a cloud server or the like that includes a processor, memory, external storage device, communication device, and the like.
- the remote monitoring/control server 1 receives and records vehicle information (more specifically, vehicle status information and surrounding environment information) from each of the plurality of autonomous vehicles 21 to 2i.
- Each of the plurality of automated driving vehicles 21 to 2i is, for example, level 4 (High Driving Automation) or level 5 (Full Driving Automation) automated driving according to the definition of J3016 defined by SAE International of the United States. and It is a moving object (in this embodiment, a vehicle) that travels unmanned.
- the plurality of automated driving vehicles 21 to 2i are not particularly limited to the above examples, and may include, for example, automated driving vehicles that perform level 1 to 3 automated driving, or normal vehicles that perform level 0 driving (where the driver manually It may be a manually operated vehicle).
- each of the plurality of automatically driven vehicles 21 to 2i is not limited to a vehicle, and may be a mobile body that moves autonomously, such as a robot or a drone.
- Each of the plurality of automated driving vehicles 21 to 2i is configured to be able to switch between an autonomous driving mode in which it runs autonomously and a remote control mode in which it is remotely controlled by each of the plurality of remote operator terminals 31 to 3j. has been done.
- Each of the plurality of automatic driving vehicles 21 to 2i is an automatic driving vehicle that executes a predetermined task in an autonomous driving mode.
- the predetermined task includes, for example, a task for a goods delivery service such as home delivery, or a task for a person delivery service such as a taxi service.
- each of the plurality of automatic driving vehicles 21 to 2i is set to an autonomous driving mode and is running autonomously.
- Each of the plurality of automatic driving vehicles 21 to 2i acquires information regarding the surrounding environment of its own vehicle using a sensor, and transmits surrounding environment information indicating the acquisition result to the remote monitoring/control server 1.
- Each of the plurality of remote operator terminals 31 to 3j receives and displays the surrounding environment information acquired by each of the plurality of automated driving vehicles 21 to 2i from the remote monitoring/control server 1.
- Each of the plurality of operators P1 to Pk controls each of the plurality of automatic driving vehicles 21 to 2i displayed on each of the plurality of remote operator terminals 31 to 3j.
- the running state of each of the plurality of autonomous vehicles 21 to 2i located in remote locations is remotely monitored while viewing the surrounding environment information of the operating vehicle.
- each of the remote operator terminals 31 to 3j may display information plotting the positions of the automatic driving vehicles 21 to 2i on a map.
- the operators P1 to Pk may perform remote monitoring while viewing such displayed information.
- each of the remote operator terminals 31 to 3j can display an arbitrary display as long as the display is for the operators P1 to Pk to remotely monitor each of the plurality of autonomous vehicles 21 to 2i. Good too.
- Each of the plurality of automated driving vehicles 21 to 2i is configured to be capable of remote control and/or remote intervention such as voice utterance by each of the plurality of remote operator terminals 31 to 3j. .
- Each of the plurality of automatic driving vehicles 21 to 2i transmits a remote intervention request (request information) requesting remote intervention to the remote monitoring/control server 1 when a predetermined event occurs.
- the remote monitoring/control server 1 notifies at least one of the remote operator terminals 31 to 3j that a remote intervention request has occurred (that is, received).
- the at least one device displays a remote intervention request alert when receiving the notification. If the operators P1 to Pk can perform remote intervention using the remote operator terminals 31 to 3j, the remote intervention request is accepted, and each of the plurality of automated driving vehicles 21 to 2i that has sent the remote intervention request Perform remote intervention for autonomous vehicles.
- the above-mentioned predetermined event occurs when a situation occurs in which it is necessary to remotely intervene in at least one of the plurality of automatically driven vehicles 21 to 2i.
- the predetermined event is (i) when a situation occurs that makes it difficult for the autonomous vehicle to continue driving autonomously, (ii) when an instruction to start or terminate autonomous control associated with the above-mentioned predetermined task
- a situation arises that requires instructions or vehicle operation instructions such as opening and closing a door, or (iii) at a place where special attention is required during autonomous driving, such as a crosswalk the driver must stop temporarily and check the safety of the surrounding area. This applies when a situation arises where it is necessary to restart autonomous driving.
- the method for implementing remote intervention is not particularly limited to the above example.
- the remote intervention may be performed for each of the plurality of automated driving vehicles 21 to 2i.
- remote intervention such as a voice instruction to alert the person or a temporary stop instruction to give way to the person or other vehicle is implemented. good.
- Each of the plurality of remote operator terminals 31 to 3j receives and displays vehicle information from each of the plurality of automated driving vehicles 21 to 2i. Operators P1 to Pk remotely intervene in each of the plurality of automated driving vehicles 21 to 2i using each of the plurality of remote operator terminals 31 to 3j.
- the remote operator terminals 31 to 3j transmit the remote intervention instructions input by the operators P1 to Pk to each of the plurality of automatic driving vehicles 21 to 2i.
- each of the plurality of automated driving vehicles 21 to 2i receives a remote intervention instruction from each of the plurality of remote operator terminals 31 to 3j
- each of the plurality of automated driving vehicles 21 to 2i performs predetermined vehicle control (hereinafter simply referred to as vehicle control) according to the remote intervention instruction. control).
- vehicle control predetermined vehicle control
- the remote monitoring/control server 1 predicts a sudden increase in the number of remote interventions, it is possible to avoid the sudden increase in the number of remote interventions by controlling at least some of the automated driving vehicles 21 to 2i. Determine whether it is possible. If it is determined that it is possible to avoid a sudden increase in remote intervention, the remote monitoring/control server 1 creates a vehicle control instruction, and transmits the created vehicle control instruction to one of the automatic driving vehicles 21 to 2i. to the self-driving vehicle that controls the vehicle.
- the timing for predicting the sudden increase in remote interventions may be a fixed period. In this case, it is possible to perform vehicle control while responding to changing conditions while the automatic driving vehicles 21 to 2i are running.
- the timing for predicting the sudden increase in remote intervention may be when the automatic driving vehicles 21 to 2i are planning the route to travel (move). In this case, it is possible to generate a route plan in which a rapid increase in remote intervention by the autonomous vehicles 21 to 2i is unlikely to occur.
- FIG. 2 is a block diagram showing an example of the configuration of the remote monitoring/control server 1 shown in FIG. 1. As shown in FIG. 2,
- the remote monitoring/control server 1 includes a communication section 11, a control section 12, and a storage section 13.
- the control unit 12 includes a remote intervention vehicle number trend estimation unit 121, a remote intervention rapid increase determination unit 122, a vehicle control determination unit 123, and an alert display determination unit 124.
- the storage unit 13 includes a control program storage unit 131, a vehicle information storage unit 132, and an operator information storage unit 133.
- the communication unit 11 receives vehicle information, map information, and route information of the automatic driving vehicles 21 to 2i from each of the plurality of automatic driving vehicles 21 to 2i, and stores the received vehicle information in the vehicle information storage unit 132. It is a device.
- the communication device is realized by, for example, a communication interface, a processor, and a memory that stores a control program executed by the processor.
- the communication interface is realized by a connector or the like to which a communication line is connected.
- the communication interface is realized by an antenna, a wireless communication circuit, and the like.
- the communication unit 11 transmits the vehicle control instruction created by the vehicle control determining unit 123 to each of the plurality of automatic driving vehicles 21 to 2i.
- the vehicle information is information regarding the size of the automatic driving vehicles 21 to 2i, the driving state such as the position and speed of the automatic driving vehicles 21 to 2i, and the environment around the automatic driving vehicles 21 to 2i.
- the communication unit 11 receives vehicle information from the automated driving vehicle 21, such as information such as the size of the automated driving vehicle 21, the position of the automated driving vehicle 21, the traveling speed, and the steering angle (also referred to as vehicle status information); , receives information (also referred to as surrounding environment information) detected by the sensor unit 212 included in the automatic driving vehicle 21.
- the map information is information regarding the locations where the automatic driving vehicles 21 to 2i travel.
- the communication unit 11 receives map information including the location where the automated driving vehicle 21 is traveling (for example, information indicating road width, presence or absence of traffic lights, etc.) from the automated driving vehicle 21 as map information.
- the route information is information regarding the travel route traveled by the automatic driving vehicles 21 to 2i.
- the communication unit 11 receives information indicating a route along which the automatic driving vehicle 21 travels as route information from the automatic driving vehicle 21.
- map information and route information may be stored in the remote monitoring/control server 1.
- the communication unit 11 receives remote intervention information from each of the plurality of remote operator terminals 31 to 3j, and stores it in the operator information storage unit 133.
- the remote intervention information is information indicating how the operator remotely intervened in the automatic driving vehicles 21 to 2i.
- the remote intervention information may include the details of the driving performed by the operator for the automated driving vehicles 21 to 2i, the content of instructions such as slow driving to the automated driving vehicles 21 to 2i, and/or information indicating that the operator is monitoring ( For example, information indicating that the remote operator terminal displays only information about the automatic driving vehicle to be monitored among the plurality of automatic driving vehicles 21 to 2i to indicate that the remote operator terminal is paying special attention to it.
- the communication unit 11 transmits the alert display instruction created by the alert display determining unit 124 to each of the plurality of remote operator terminals 31 to 3j.
- the control unit 12 is composed of a processor such as a CPU (Central Processing Unit), and executes a predetermined control program stored in the control program storage unit 131 to monitor the change in the number of remotely intervened vehicles. It functions as an estimation unit 121, a remote intervention rapid increase determination unit 122, a vehicle control determination unit 123, and an alert display determination unit 124.
- a processor such as a CPU (Central Processing Unit)
- CPU Central Processing Unit
- the remote intervention vehicle number trend estimating unit 121 refers to the vehicle information storage unit 132, acquires vehicle information, map information, and route information of the autonomous vehicles 21 to 2i, and determines whether remote intervention is required at a future time.
- the change in the number of operating vehicles 21 to 2i (also referred to as the number of remote intervention vehicles) is estimated as the change in the number of automatically driven vehicles 21 to 2i in which remote intervention occurs.
- the remote intervention vehicle number transition estimating unit 121 estimates the future time of each of the plurality of automated driving vehicles 21 to 2i based on the vehicle information, map information, and route information of the automated driving vehicles 21 to 2i.
- the start time and end time of remote intervention are estimated, and the number of remote intervention vehicles at a future time is calculated as the number of automatically driven vehicles 21 to 2i in which remote intervention will occur.
- the remote intervention vehicle number trend estimation unit 121 acquires vehicle information, map information, and route information of the automated driving vehicles 21 to 2i, and calculates the change in the number of automated driving vehicles 21 to 2i that will undergo remote intervention at the same time at a future time. A specific example of estimating will be described later.
- the remote monitoring/control server 1 acquires information used for estimating the start time and end time of remote intervention at a future time for each of the plurality of automatic driving vehicles 21 to 2i from an external device such as infrastructure. It's okay.
- the start time and end time of the automatic driving vehicle 21-2i and the pedestrian passing each other are calculated from the relative speed between the automatic driving vehicle 21-2i and the pedestrian, and the starting time of the automatic driving vehicle 21-2i and the pedestrian passing each other is calculated.
- the end time may be the start time and end time of remote intervention at a future time for each of the plurality of automatic driving vehicles 21 to 2i.
- the remote intervention vehicle number transition estimating unit 121 estimates the number of remote intervention vehicles at the estimated future time, the start time and end time of the remote intervention at the future time of each of the plurality of automated driving vehicles 21 to 2i, and calculates the number of remote intervention vehicles at the future time. It is output to the rapid increase determination unit 122.
- the time when the automatic driving vehicle 21 starts crossing the crosswalk and the time when it finishes crossing the crosswalk are determined based on the vehicle speed received from the automatic driving vehicle 21 and the position of the crosswalk included in the map information stored in the map information storage unit 2151. It can be calculated from
- the automatic driving vehicle 21 to 2i is The travel start time and travel end time of a road whose width is twice or less may be used.
- the road width information may be stored in advance in the map information storage unit 2151, or may be calculated using information acquired using the sensor unit 212 while the automatic driving vehicle 21 is traveling, for example.
- the vehicle information, map information, and route information of the automatic driving vehicles 21 to 2i are used. It may be estimated by integrating. For example, by associating a function or table (also referred to as probability information) stored in advance in the control program storage unit 131 with vehicle information, map information, and route information, remote intervention can be generated based on each piece of information.
- the probability may be estimated and estimated as the start time and end time at which the total value of the remote intervention occurrence probability becomes a predetermined value, for example, 50% or more.
- the probability of occurrence of remote intervention is a numerical value that indicates the possibility that an operator will need to intervene remotely. For example, the probability of remote intervention occurring is high at locations where driving is difficult, such as locations where the road width is narrow, or locations where there is high risk, such as locations where there are many pedestrians. On the other hand, the probability of remote intervention occurring is low at locations where driving is easy, such as locations with wide roads, or locations where there is low risk, such as locations where there are no pedestrians.
- the remote intervention vehicle number trend estimation unit 121 estimates vehicle information, map information, and probability information (for example, remote intervention occurrence probability for road width, remote intervention occurrence probability for the number of pedestrians, and The probability of remote intervention occurring is calculated based on the number of pedestrians, road width, etc. For example, the remote intervention vehicle number trend estimating unit 121 determines whether the calculated remote intervention occurrence probability exceeds a predetermined threshold, and if it determines that it exceeds the threshold, the operator performs remote intervention. Determine that it is necessary.
- the remote intervention vehicle number trend estimation unit 121 calculates the remote intervention occurrence probability at each point on the travel route of each of the automatic driving vehicles 21 to 2i, and calculates the remote intervention occurrence probability at each point on the travel route of each of the automatic driving vehicles 21 to 2i, and calculates the remote intervention occurrence probability and the position of the automatic driving vehicles 21 to 2i indicated by the vehicle information. Based on speed (for example, average speed in the travel plan), etc., it is calculated when the calculated remote intervention occurrence probability exceeds a threshold value. Thereby, the remote intervention vehicle number transition estimating unit 121 estimates (calculates) when and how many automatic driving vehicles 21 to 2i require remote intervention, that is, the transition in the number of remote intervention vehicles.
- the remote intervention vehicle number transition estimating unit 121 uses the above function or table to determine, for example, when two pedestrians located 10 meters away from the automated driving vehicle 21
- the probability of remote intervention occurring from 10 seconds to 12 seconds when the vehicle is approaching at a relative speed of 1.0 m/s is calculated as 50%.
- the remote intervention vehicle number trend estimating unit 121 uses the above function or table to estimate the road width information included in the map information when the autonomous vehicle 21 is traveling at 1.0 m/s.
- the probability of remote intervention occurring from 10 seconds to 20 seconds is calculated as 30%.
- the threshold value is set to, for example, set the probability of occurrence of remote intervention as 40%.
- the remote intervention vehicle number trend estimation unit 121 determines that the operator needs to perform remote intervention. On the other hand, for example, if the calculated remote intervention occurrence probability is 30%, the remote intervention vehicle number trend estimation unit 121 determines that there is no need for the operator to perform remote intervention.
- the remote intervention rapid increase determination unit 122 estimates whether there will be a rapid increase in remote intervention at a future time based on the transition in the number of remote intervention vehicles estimated by the remote intervention vehicle number transition estimation unit 121. Specifically, the estimation of the presence or absence of a sudden increase in remote intervention at a future time is performed within a predetermined time period (also referred to as a predetermined period) from the start time of remote intervention of each of the plurality of automated driving vehicles 21 to 2i. For example, the determination is made based on whether or not the number of remotely intervened vehicles increases by a predetermined first threshold, for example, 3 or more within 0.3 minutes.
- the predetermined period may be arbitrarily determined in advance and is not particularly limited. The predetermined period may be less than 0.3 minutes or more than 0.3 minutes.
- the remote intervention rapid increase determination unit 122 collects information indicating the presence or absence of remote intervention, timing, etc. of each autonomous driving vehicle of the plurality of autonomous vehicles 21 to 2i, and vehicle information. It is output to the vehicle control determining section 123.
- the time estimated to be required for the operator to respond to the remote intervention may be used as the predetermined time.
- the estimated time required for operators to eliminate the burden caused by the rapid increase in remote interventions may include, for example, in similar situations in the past when autonomous vehicles requiring remote intervention were It may also be possible to use a record of the time required to determine the response order and response details of a plurality of automatically-driving vehicles that have requested intervention (also referred to as vehicles requesting remote intervention).
- the predetermined time and the predetermined first threshold value may be changed depending on the skill level of the operator or the fatigue level of the operator. For example, when the operator's skill level is low or the operator's fatigue level is high, the burden caused by a sudden increase in remote intervention is large, so the predetermined time is reduced or the predetermined first threshold value is reduced. Therefore, adjustments may be made so that it is easier to determine that a sudden increase in remote intervention is occurring.
- the operator's skill level may be defined, for example, by the operator's cumulative remote monitoring time, and may be stored in the operator information storage unit 133.
- the fatigue level of the operator may be defined, for example, by the time during which remote monitoring is performed continuously, or may be stored in the operator information storage unit 133.
- the predetermined time and the predetermined first threshold may be changed depending on the time of day or the weather. For example, at night or under bad weather, it becomes difficult to confirm the situation in order to determine the response order and response details for multiple vehicles requesting remote intervention, which increases the burden caused by the rapid increase in remote intervention requests. Therefore, in such a case, adjustment may be made such that it is easier to determine that there is a sudden increase in remote intervention by reducing the predetermined time or the predetermined first threshold value.
- the predetermined first threshold value may be changed depending on the number of remotely intervened vehicles at the immediately preceding time. For example, when a vehicle requesting remote intervention has a higher priority for remote intervention than an autonomous vehicle undergoing remote intervention (also referred to as a vehicle undergoing remote intervention), the operator may decide to perform remote intervention on the vehicle undergoing remote intervention. In some cases, the configuration is such that it is possible to temporarily suspend the remote intervention and perform remote intervention on the vehicle that is requesting remote intervention. In such a case, each time a remote intervention request occurs, for example, each time an operator receives request information requesting remote intervention from a vehicle requesting remote intervention, the operator must check the vehicle performing remote intervention and the vehicle requesting remote intervention. It is necessary to confirm each situation and determine the order and content of responses.
- an increase in the number of remote intervention vehicles from 3 to 6 will cause a greater burden on operators due to the rapid increase in remote intervention than an increase in the number of remote intervention vehicles from 0 to 3. becomes large, so the predetermined first threshold value is set small, for example, to two devices.
- the remote intervention surge determining unit 122 can appropriately change the condition for determining whether there is a sudden increase in remote intervention (in this embodiment, the first threshold) depending on the situation. This reduces the burden on operators caused by the rapid increase in remote intervention.
- the remote intervention rapid increase determination unit 122 may change (determine) the predetermined first threshold based on the service quality of the service provided by the automated driving vehicle. For example, if the service quality does not deteriorate when predetermined vehicle control is performed to avoid a sudden increase in remote interventions (for example, in the case of a product delivery service, the remote intervention sudden increase determination unit 122 determines whether the delivery completion time If there is no delay), the first threshold value may be adjusted to be smaller so that it is easier to determine that there is a sudden increase. For example, in a product delivery service, when all vehicles have completed delivery of products and are forwarding them to a hangar, the remote intervention sudden increase determination unit 122 performs predetermined vehicle control to avoid a sudden increase in remote intervention. The predetermined first threshold value is made small because the service quality does not deteriorate when this is implemented.
- the vehicle control determination unit 123 causes the plurality of automatically driven vehicles 21 to 2i to perform predetermined vehicle control. Specifically, the vehicle control determining unit 123 receives remote intervention information, vehicle information, map information, and route information of each of the plurality of autonomous vehicles 21 to 2i, received from the remote intervention rapid increase determination unit 122. Based on information such as, at least the minimum number of autonomous vehicles necessary to avoid a sudden increase in remote intervention is selected. For example, the vehicle control determining unit 123 selects, from among the plurality of automatic driving vehicles 21 to 2i that require remote intervention, in descending order of remote intervention start time, and performs vehicle control on the selected automatic driving vehicle.
- the predetermined vehicle control is, for example, vehicle control that performs a temporary stop for the minimum temporary stop time necessary to avoid a sudden increase in remote intervention. For example, when it is assumed that the automated driving vehicle 21 has performed the above-described predetermined vehicle control, it is determined that there will be no sudden increase in remote intervention at the above future time, and furthermore, it is determined that the automated driving vehicle 21 can be safely temporarily stopped. If so, it is determined that the above-mentioned predetermined vehicle control can be performed. In this way, as the automatic driving vehicle that executes the predetermined vehicle control, an automatic driving vehicle that can safely perform the predetermined vehicle control (that is, an automatic driving vehicle with a high degree of safety) may be selected.
- the minimum number of vehicles required to avoid a sudden increase in remote interventions can be calculated from the increase in the number of remote intervention vehicles at the time when a sudden increase in remote interventions is estimated to occur and a predetermined first threshold value.
- the minimum pause time necessary to avoid a sudden increase in the number of remote interventions described above is such that the remote intervention occurs at the predetermined time after the remote intervention start time of the automated driving vehicle that initially starts the remote intervention. It can be calculated from the time required to
- vehicle control determining unit 123 determines a predetermined vehicle control to avoid a sudden increase in remote intervention.
- the vehicle control determining unit 123 creates an instruction to execute the predetermined vehicle control (also referred to as a predetermined vehicle control instruction), and uses the communication unit 11 to create an instruction to execute the predetermined vehicle control. Then, a predetermined vehicle control instruction is transmitted to one of the automatically driven vehicles 21 to 2i that is to be caused to execute a predetermined vehicle control.
- a predetermined vehicle control instruction is transmitted to one of the automatically driven vehicles 21 to 2i that is to be caused to execute a predetermined vehicle control.
- the vehicle control determining unit 123 may send an alert to the operator via the communication unit 11, for example, to determine the content of a predetermined vehicle control instruction, or may notify the operator of the content of the vehicle control instruction. You may.
- the vehicle control determining unit 123 may determine the details of the vehicle control and the vehicle on which the vehicle control is to be performed so that the deterioration in service quality is minimized.
- the vehicle control determining unit 123 may determine whether the automatic driving vehicle 21 suddenly needs remote intervention due to a change in the situation before or during vehicle control. If avoided, an instruction to cancel the vehicle control instruction may be transmitted to the automatic driving vehicle 21 via the communication unit 11.
- the vehicle control determining unit 123 determines the time when the sudden increase in remote intervention is estimated to occur, the time when the sudden increase in remote intervention is estimated to occur. The presence/absence of remote intervention to the autonomous vehicle and vehicle information at the times before and after are output to the alert display determining unit 124.
- the alert display determining unit 124 determines, based on the time when a sudden increase in remote interventions is estimated to occur, the presence or absence of remote intervention in the self-driving vehicle at the time before and after the time when a sudden increase in remote interventions is estimated to occur, and the vehicle information. Create predetermined alert display instructions.
- the alert display determining section 124 uses the communication section 11 to transmit an alert display instruction to the remote operator terminals 31 to 3j.
- the predetermined alert display instruction is, for example, an instruction to display to all operators the time when a sudden increase in remote interventions is estimated to occur.
- operators who may perform remote intervention can prepare for a sudden increase in remote intervention, and can reduce the burden caused by the sudden increase in remote intervention.
- the predetermined alert display instruction may be sent to an operator who is not executing the remote intervention process (also referred to as performing remote intervention). In this case, since no alert display is generated for the operator during remote intervention, the operator can concentrate on the remote intervention.
- the predetermined alert display instruction may be an instruction to display different content for each operator.
- operators who are not implementing teleinterventions and highly skilled operators will be notified of detailed information regarding the sudden increase in teleinterventions
- operators who are implementing teleinterventions and less skilled operators will be notified of the sudden increase in teleinterventions.
- the transmission time of the predetermined alert display instruction may be changed depending on the time up to the time when a sudden increase in remote intervention is estimated to occur.
- the alert display determining unit 124 can display the alert at an appropriate timing to prepare for a sudden increase in the number of remote interventions by transmitting the predetermined alert display instruction 30 seconds before the time when the remote intervention occurs. can.
- the alert display determining unit 124 may determine the transmission time of the predetermined alert display instruction to be earlier as the number of remotely intervened vehicles increases. In this case, the alert display determining unit 124 causes the remote operator terminal 31 to display an alert so that the more the burden associated with the rapid increase in remote interventions is, the more the operator can prepare for the rapid increase in remote interventions. be able to.
- the storage unit 13 is composed of, for example, a semiconductor memory, and functions as a control program storage unit 131, a vehicle information storage unit 132, and an operator information storage unit 133.
- the control program storage unit 131 stores various programs for controlling the remote monitoring/control server 1.
- the vehicle information storage unit 132 stores in advance the identification number of each of the plurality of automatic driving vehicles 21 to 2i.
- the identification number of each of the plurality of automatic driving vehicles 21 to 2i various information can be used as long as each of the plurality of automatic driving vehicles 21 to 2i can be individually identified.
- the IP address Internet Protocol address
- the identification number of the automatic driving vehicles 21 to 2i may be used as the identification number of the automatic driving vehicles 21 to 2i.
- the communication unit 11 receives vehicle information, map information stored in the map information storage unit 2151, and route information stored in the route information storage unit 2152 from each of the automatic driving vehicles 21 to 2i.
- the information is stored in the vehicle information storage section 132.
- the operator information storage unit 133 stores in advance the identification number of each of the plurality of operators P1 to Pk and the identification number of each of the plurality of remote operator terminals 31 to 3j.
- the identification number of each of the plurality of operators P1 to Pk various information can be used as long as each of the plurality of operators P1 to Pk can be individually identified.
- an identification number uniquely assigned in advance to each of the plurality of operators P1 to Pk can be used.
- the identification number of each of the plurality of remote operator terminals 31 to 3j various information can be used as long as each of the plurality of remote operator terminals 31 to 3j can be individually identified. can.
- the IP address of each of the plurality of remote operator terminals 31 to 3j can be used as the identification number of the plurality of remote operator terminals 31 to 3j.
- the operator information storage unit 133 may be configured to store each of the plurality of remote operator terminals 31 to 3j used by each of the plurality of operators P1 to Pk.
- the operator information storage unit 133 may store an identification number of an operator and an identification number of a remote operator terminal used by the operator in association with each other as operator information.
- the operator information is information regarding operators P1 to Pk.
- the operator information includes, for example, information indicating the correspondence between the operator's identification number and the identification number of the remote operator terminal used by the operator, information indicating the operator's skill level, information indicating the operator's fatigue level, etc. .
- the remote monitoring/control server 1 can display an alert to a specific operator via the remote operator terminal.
- FIG. 3 is a block diagram showing an example of the configuration of the automatic driving vehicle 21 shown in FIG. 1.
- FIG. 3 the illustration is simplified and only the automatic driving vehicle 21 among the plurality of automatic driving vehicles 21 to 2i is shown.
- the automatic driving vehicles 22 to 2i are configured similarly to the automatic driving vehicle 21 and operate in the same manner. In the following description, the configuration and operation of the plurality of automatic driving vehicles 21 to 2i will be explained using the automatic driving vehicle 21.
- the automatic driving vehicle 21 includes a communication section 211, a sensor section 212, a drive section 213, a control section 214, a storage section 215, a display section 216, and a service provision section 217.
- the control unit 214 includes a communication control unit 2141 and a travel control unit 2142.
- the storage unit 215 includes a map information storage unit 2151, a route information storage unit 2152, and a control program storage unit 2153.
- the configuration of the automatic driving vehicle 21 is not particularly limited to this example.
- a configuration may be adopted in which some or all of the functions of the remote monitoring/control server 1 are included in the automatic driving vehicle 21.
- the communication unit 211 performs wireless communication with the remote monitoring/control server 1 and the remote operator terminal 31 under the control of the communication control unit 2141 , and communicates with the remote monitoring/control server 1 and the remote operator terminal 31 so that the automated driving vehicle 21
- the automatic driving vehicle 21 transmits vehicle information including vehicle status information regarding the vehicle body, such as vehicle speed, current position, and steering angle, and surrounding environment information of the automatic driving vehicle 21 .
- the communication unit 211 also receives a command to control the automatic driving vehicle 21 from the remote monitoring/control server 1 .
- the communication unit 211 also receives a command to remotely intervene in the automatic driving vehicle 21 from the remote operator terminal 31.
- the communication unit 211 is realized by, for example, a communication interface and a processor for wireless communication.
- the communication interface is realized by an antenna, a wireless communication circuit, and the like.
- the communication unit 211 may use a wireless LAN (Local Area Network), a mobile phone, a PHS (personal handyphone system), or the like.
- a wireless LAN Local Area Network
- a mobile phone a mobile phone
- a PHS personal handyphone system
- the sensor unit 212 is composed of sensors such as a plurality of cameras for photographing the surroundings of the automatic driving vehicle 21, and is attached to the front, rear, right side, and left side of the automatic driving vehicle 21, respectively.
- the sensor unit 212 outputs information obtained by sensing the surroundings of the automatic driving vehicle 21 to the control unit 214 and the communication unit 211 as surrounding environment information.
- the sensor section 212 is not particularly limited to the above example. As long as the configuration is capable of sensing information about the automatic driving vehicle 21 and its surroundings, for example, the mounting position of the sensor included in the sensor unit 212, the number of mounted sensors, and the type of sensor may be changed arbitrarily.
- the sensor unit 212 may include, for example, an omnidirectional camera, a GPS (Global Positioning System) receiver, a LiDAR (Light Detection and Ranging), a steering angle sensor, a vehicle speed sensor, an odometer, and/or an inertial sensor.
- the drive unit 213 is composed of, for example, an engine and a transmission. Furthermore, when the automatic driving vehicle 21 is an electric vehicle (battery vehicle) in the narrow sense, the drive unit 213 is configured of, for example, a travel motor, a transmission, and the like. Both the engine and the travel motor are started and stopped via an ignition switch. Furthermore, the drive unit 213 also includes an accelerator device, a brake device, and a steering device, and accelerates, decelerates, and steers the automatic driving vehicle 21.
- the control unit 214 is composed of, for example, a processor such as a CPU, and functions as a communication control unit 2141 and a travel control unit 2142.
- the communication control unit 2141 controls the communication unit 211 and the sensor unit 212.
- the driving control unit 2142 executes the driving program stored in the control program storage unit 2153.
- the travel control unit 2142 controls the drive unit 213 based on the route information stored in the route information storage unit 2152, the surrounding environment information acquired by the sensor unit 212, etc. according to the travel program.
- the travel control unit 2142 controls the drive unit 213 and the like to cause the automatic driving vehicle 21 to travel autonomously in the autonomous driving mode, or remotely controls the automatic driving vehicle 21 according to remote control by the remote operator terminal 31.
- the drive unit 213 and the like are controlled to run in the maneuver mode.
- the driving control unit 2142 detects that the above-mentioned predetermined event has occurred in the automatic driving vehicle 21 from the vehicle status information and surrounding environment information, and sends a remote intervention request requesting remote intervention using the communication unit 211. Send to remote monitoring/control server 1.
- the storage unit 215 is composed of, for example, a semiconductor memory, and functions as a map information storage unit 2151, a route information storage unit 2152, and a control program storage unit 2153.
- the map information storage unit 2151 stores map information in advance.
- the map information includes, for example, road data regarding road links, intersection data regarding intersections, data regarding facilities, and feature data indicating displays installed or formed on roads.
- the map information is used when generating route information to be used when the automatic driving vehicle 21 autonomously travels in the autonomous driving mode.
- the route information storage unit 2152 stores route information indicating the route from the departure point to the destination of the automatic driving vehicle 21.
- the route information is information that can be generated by an existing route generation program.
- the automatic driving vehicle 21 can obtain route information generated by, for example, an external server by receiving the route information from the server. Further, the automatic driving vehicle 21 may have a predetermined route generation program, and may generate route information and store it in the route information storage unit 2152 by executing the route generation program.
- the control program storage unit 2153 stores in advance various programs necessary for controlling the automatic driving vehicle 21.
- the display unit 216 includes, for example, a direction indicator, a speaker, and the like.
- the display unit 216 automatically or by remote intervention of the operators P1 to Pk notifies pedestrians and other vehicles around the automated driving vehicle 21 of the driving intention and vehicle information of the automated driving vehicle 21. used for.
- the service providing unit 217 is a mechanism used by the automatic driving vehicle 21 to provide services. For example, when the automatic driving vehicle 21 provides a service for transporting people, the service providing unit 217 corresponds to a door or the like.
- the service providing unit 217 is operated, for example, automatically or by remote intervention of operators P1 to Pk.
- FIG. 4 is a block diagram showing an example of the configuration of the remote operator terminal 31 shown in FIG. 1. As shown in FIG. 4
- FIG. 4 only the remote operator terminal 31 among the plurality of remote operator terminals 31 to 3j is shown to simplify the illustration.
- the remote operator terminals 32 to 3j are configured similarly to the remote operator terminal 31 and operate similarly.
- the configuration and operation of the plurality of remote operator terminals 31 to 3j will be explained using the remote operator terminal 31. Further, the remote operator terminal 31 will be explained as being used by the operator P1.
- the remote operator terminal 31 shown in FIG. 4 includes a communication section 311, an output section 312, an input section 313, a control section 314, and a storage section 315.
- the configuration of the remote operator terminal 31 is not particularly limited to this example.
- a configuration may be adopted in which part or all of the functions of the remote monitoring/control server 1 are included in the remote operator terminal 31.
- the communication unit 311 communicates with the remote monitoring/control server 1 and receives an alert display instruction from the remote monitoring/control server 1.
- the communication unit 311 also communicates with the remote monitoring/control server 1 and transmits remote intervention information to the remote monitoring/control server 1 .
- the communication unit 311 also communicates with the automated driving vehicle 21 and receives vehicle status information regarding the vehicle body such as the vehicle speed, current position, and steering angle of the automated driving vehicle 21 and the surroundings of the automated driving vehicle 21. Receive vehicle information including environmental information.
- the communication unit 311 also communicates with the automated driving vehicle 21 and transmits a remote intervention instruction to the automated driving vehicle 21.
- the communication unit 311 is realized by, for example, a communication interface and a processor for wireless communication.
- the communication interface is realized by an antenna, a wireless communication circuit, and the like.
- the communication unit 311 may use a wireless LAN, a mobile phone, a PHS, or the like in addition to a general wireless communication device.
- the output unit 312 includes, for example, a display device such as a liquid crystal display, and displays information related to the vehicle body, such as the vehicle speed, current position, and steering angle of the automatic driving vehicle 21, which is received from the automatic driving vehicle 21 via the communication unit 311.
- Vehicle information including vehicle status information and surrounding environment information of the automatic driving vehicle 21 is displayed.
- the output unit 312 can display vehicle status information and surrounding environment information using a known display method, for example, displaying the information simultaneously on one display or displaying each piece of information on separate displays. You may. Further, when the surrounding environment information is information acquired by a plurality of sensors, the output unit 312 may display the sensor information separately, or may integrate the sensor information and display the integrated sensor information. Good too.
- the output unit 312 displays a remote request alert received from the automatic driving vehicle 21 via the communication unit 311 and a remote intervention rapid increase alert received from the remote monitoring/control server 1 via the communication unit 311. do.
- the input unit 313 is composed of a user interface such as a keyboard, a mouse, and/or a joystick, and is used by the operator P1 to perform various remote interventions.
- the operator P1 inputs, through the input unit 313, a command steering amount that specifies, for example, the vehicle speed and steering amount of the automated driving vehicle 21, as a remote intervention instruction for remotely intervening with the automated driving vehicle 21.
- the input unit 313 may be configured from the same operating environment as when actually operating the vehicle, such as a steering wheel, brake, accelerator, etc.
- the operator P1 can input driving instructions as if he were actually driving the vehicle.
- the control unit 314 is composed of, for example, a processor such as a CPU, and controls the communication unit 311, the output unit 312, and the input unit 313.
- the storage unit 315 is composed of, for example, a semiconductor memory, and stores a remote intervention application program for remotely intervening with the automatic driving vehicle 21, information received from the automatic driving vehicle 21, information input from the operator P1, etc. Stores various information.
- the control unit 314 executes a remote intervention application program stored in the storage unit 315, for example, and controls the communication unit 311, the output unit 312, the input unit 313, etc., thereby performing various controls on the remote operator terminal 31. conduct.
- the operator P1 uses the input unit 313 to remotely intervene in, for example, the automatic driving vehicle 21.
- the communication unit 311 transmits the remote intervention instruction input through the input unit 313 to, for example, the automatic driving vehicle 21.
- FIG. 5 is an example of vehicle information of each of the automatic driving vehicles 21 to 2i when the current time is set to time 0.
- the remote intervention vehicle number transition estimation unit 121 it is estimated by the remote intervention vehicle number transition estimation unit 121 that the remote intervention 51 will occur in the autonomous vehicle 21 as it travels on a narrow road. Furthermore, it is estimated by the remote intervention vehicle number transition estimating unit 121 that the remote intervention 52 will occur in the autonomous vehicle 22 due to the approach of a pedestrian. Furthermore, it is estimated by the remote intervention vehicle number transition estimating unit 121 that the remote intervention 53 will occur in the automated driving vehicle 23 when the vehicle crosses a crosswalk. Furthermore, it is estimated by the remote intervention vehicle number transition estimating unit 121 that remote intervention will not occur in the automatically driven vehicles 24 to 2i.
- FIG. 6 is an example of remote intervention information estimated by the remote intervention vehicle number transition estimation unit 121 in the example shown in FIG. 5.
- the remote intervention 51 is estimated by the remote intervention vehicle number transition estimation unit 121 to be performed from the remote intervention start 61A after 0.1 minutes to the remote intervention end 61B after 1.0 minutes. There is. Further, it is estimated by the remote intervention vehicle number transition estimating unit 121 that the remote intervention 52 will be performed from the remote intervention start 62A after 0.2 minutes to the remote intervention end 62B after 0.7 minutes. Further, it is estimated by the remote intervention vehicle number transition estimating unit 121 that the remote intervention 53 will be performed from the remote intervention start 63A after 0.3 minutes to the remote intervention end 63B after 0.8 minutes.
- FIG. 7 is a specific example in which the example shown in FIG. 6 is determined by the remote intervention rapid increase determining unit 122 to be accompanied by a rapid increase in remote interventions.
- the remote intervention rapid increase determination unit 122 determines that the increase in the number of automated driving vehicles 21 to 2i to which remote intervention is performed within the predetermined time period is greater than or equal to the predetermined first threshold, It is determined that there is a sudden increase.
- FIG. 8 is a specific example in which the vehicle control determination unit 123 determines vehicle control to avoid a sudden increase in remote interventions in the example of the rapid increase in remote interventions shown in FIG.
- the predetermined first threshold value is 3 vehicles
- the increase in the number of automated driving vehicles 21 to 2i that are subject to remote intervention within the predetermined time period is 3 vehicles.
- the minimum number of vehicles required to perform vehicle control is one. Therefore, in order to avoid a sudden increase in remote intervention, a vehicle control instruction to temporarily stop one autonomous vehicle is sent.
- automatic driving vehicle 23 is selected as the automatic driving vehicle to perform vehicle control.
- the minimum time required to avoid a sudden increase in remote intervention is The time is such that the remote intervention start 73A of the automatic driving vehicle 23 occurs at a time when a predetermined time has elapsed from the start 61A, and the remote intervention start 63A predicted by the remote intervention vehicle number transition estimation unit 121 is the remote intervention start.
- 73A is calculated as 0.1 minute for delayed generation.
- the vehicle control determining unit 123 transmits a vehicle control instruction to implement the 0.1-minute temporary stop to the automatic driving vehicle 23. .
- FIG. 9 is a flowchart illustrating an example of a process for reducing the burden on operators caused by the rapid increase in remote intervention by the remote monitoring/control server 1.
- step S11 With reference to the vehicle information storage unit 132, vehicle information, map information, and route information of the automatic driving vehicles 21 to 2i are acquired and output to the remote intervention vehicle number transition estimation unit 121 (step S11).
- the remote intervention vehicle number trend estimating unit 121 calculates the remote intervention at a future time for each of the plurality of automated driving vehicles 21 to 2i based on the vehicle information, map information, and route information of the automated driving vehicles 21 to 2i. , and calculates the number of remotely intervened vehicles at a future time as the number of automatically operated vehicles 21 to 2i that will be remotely intervened at the same time (step S12).
- the remote intervention vehicle number trend estimation unit 121 outputs the estimated number of remote intervention vehicles at a future time to the remote intervention rapid increase determination unit 122.
- the remote intervention rapid increase determination unit 122 determines whether there is a rapid increase in remote intervention by determining whether there is an increase in the number of remote intervention vehicles by a predetermined number or more within a predetermined time (step S13).
- the vehicle control determining unit 123 determines not to transmit the vehicle control instruction and the alert display instruction from the alert display determining unit 124, and ends the process. .
- the vehicle control determining unit 123 determines whether a rapid increase in remote interventions can be avoided by vehicle control (step S14). Specifically, the vehicle control determining unit 123 determines the time when a sudden increase in remote interventions is estimated to occur, the presence or absence of remote intervention by the autonomous vehicle at the time before and after the time when the sudden increase in remote interventions is estimated to occur, and the vehicle Based on the information, map information, and route information, it is possible to determine whether or not it is possible to avoid a sudden increase in number of automatically-driving vehicles by predetermined vehicle control, at least for the number of autonomous vehicles required to avoid a sudden increase in remote intervention, and whether or not the sudden increase in the number of vehicles required for remote intervention is possible. Determine whether control is executable.
- the vehicle control determining unit 123 causes the automatically driven vehicles 21 to 2i to perform predetermined vehicle control in order to avoid a sudden increase in remote intervention.
- a vehicle control instruction for implementing the above is created (step S15), and the vehicle control instruction is transmitted to the automatic driving vehicles 21 to 2i using the communication unit 11 (step S16).
- the automatic driving vehicles 21 to 2i that have received the vehicle control instruction via the communication unit 211 control the drive unit 213 using the travel control unit 2142 to perform vehicle control that avoids a sudden increase in remote intervention. I do.
- the alert display determining unit 124 creates an alert display instruction to notify of a sudden increase in remote interventions (Ste S17), the communication unit 11 is used to transmit an alert display instruction to the remote operator terminals 31 to 3j (step S18).
- the remote operator terminals 31 to 3j that have received the alert display instruction via the communication unit 311 display the alert on the output unit 312 by the control unit 314, and notify the operators P1 to Pk.
- the remote monitoring and control server 1 creates travel plan instructions to avoid the sudden increase, and uses the created instructions to automatically drive automatic driving that requires changes in the travel plan. It is being sent to the vehicle. Therefore, according to the remote monitoring/control server 1, it is possible to avoid a sudden increase in the number of remote interventions, reduce the occurrence of multiple remote intervention request alerts, and reduce the burden on the operator caused by the sudden increase in the number of remote interventions. can. As a result, when performing long-term remote monitoring or remote monitoring of multiple automatic operations, it is possible to reduce the loss of concentration due to operator fatigue, and it is possible to realize a situation where remote monitoring is easy and safe.
- the predetermined vehicle control may be performed on more automatically driven vehicles than the minimum number of vehicles required to avoid a sudden increase in the number of remote interventions. For example, if the minimum number of vehicles required to avoid a sudden increase in remote intervention is one, the predetermined vehicle control is performed on two automatically driven vehicles. This can reduce the frequency of occurrence of a situation in which a sudden increase in remote intervention cannot be avoided as expected. In this case, it is preferable that the number of vehicles to be controlled increases as the number of operators capable of remote intervention is small or the fatigue level of the operators increases.
- the predetermined vehicle control may be an instruction to change the speed of the autonomous vehicle.
- the minimum pause time required to avoid the above-mentioned rapid increase in remote intervention is 30 seconds
- the driving speed of the automated driving vehicle is 1.0 m/s
- the length of the road to the predicted position where remote intervention will occur. is 30 m
- vehicle control may be performed to change the traveling speed of the automatically-driving vehicle to 0.5 m/s. This makes it possible to safely avoid a sudden increase in remote intervention even if it is dangerous to temporarily stop the autonomous vehicle.
- the predetermined vehicle control may be a route change instruction for the automatically driven vehicle. For example, if the autonomous vehicle can arrive at the destination faster by changing the route than by controlling the vehicle to temporarily stop or change speed, the route change instruction may be executed. This makes it possible to avoid a rapid increase in remote intervention while suppressing a decline in the driving efficiency of the autonomous vehicle.
- the same vehicle control or different vehicle control may be performed for each automatic driving vehicle of the plurality of automatic driving vehicles.
- the predetermined vehicle control is performed on the automatic driving vehicle at a time when a sudden increase in remote intervention is estimated to occur, and a time before and after the time when a sudden increase in remote intervention is estimated to occur, which is received from the remote intervention sudden increase determination unit 122.
- the determination may be made in consideration of the presence or absence of remote intervention, errors in vehicle information, map information, and route information.
- the predetermined vehicle control is a temporary stop
- the minimum temporary time required to avoid a sudden increase in remote interventions is determined by taking into consideration the error in the time at which a sudden increase in remote interventions is estimated to occur.
- the vehicle control may be such that the vehicle is temporarily stopped for a certain period of time, for example, 0.5 minutes added to the stop time.
- an automatic driving vehicle that can safely perform the vehicle control may be preferentially selected.
- an autonomous vehicle that performs the above-mentioned predetermined vehicle control may be traveling on a wide road and/or with few pedestrians or other vehicles nearby when the vehicle control is temporarily stopped.
- the driving vehicle may be selected preferentially.
- parameters of the automated driving vehicle such as small size, light weight, or slow running speed, or past driving data may be used as conditions for selecting an automated driving vehicle that can safely perform vehicle control. good.
- an automatic driving vehicle for which service provision has been completed may be preferentially selected as the automatic driving vehicle that performs the above-described predetermined vehicle control. This makes it possible to avoid a rapid increase in remote interventions while limiting the decline in efficiency of service provision.
- an automatic driving vehicle that performs the above-mentioned predetermined vehicle control an automatic driving vehicle that has a small influence on the overall driving efficiency may be preferentially selected.
- an automatic driving vehicle that performs the above-mentioned predetermined vehicle control may be selected as an automatic driving vehicle that requires a short period of time to make a temporary stop in order to avoid a sudden increase in remote intervention. This makes it possible to avoid a rapid increase in remote interventions while limiting the decline in efficiency of service provision.
- the time at which the predetermined vehicle control is performed may be a time at which the automatically-driving vehicle satisfies conditions suitable for implementing the vehicle control.
- the vehicle control instructions will implement a one-minute pause when the autonomous vehicle reaches a wide roadway, if a one-minute pause is necessary to avoid a surge in remote intervention. It may also be a vehicle control instruction. This makes it easier to ensure safety when the autonomous vehicle performs vehicle control.
- the information processing method is an information processing method in an information processing device, and the information processing method is an information processing method in an information processing device, and the first information regarding the running of the two or more autonomous mobile objects is acquired for each of the two or more autonomous mobile objects. (e.g., S11), and based on the first information, estimate second information indicating the number of target autonomous mobile bodies for which operation or monitoring by a remote operator is to be started among the two or more autonomous mobile bodies in a predetermined period.
- the first information regarding the running of the two or more autonomous mobile objects is acquired for each of the two or more autonomous mobile objects. (e.g., S11), and based on the first information, estimate second information indicating the number of target autonomous mobile bodies for which operation or monitoring by a remote operator is to be started among the two or more autonomous mobile bodies in a predetermined period.
- a predetermined value e.g., S13
- the predetermined value e.g., YES in S13
- An example of an information processing device is a remote monitoring/control server 1. Further, an example of two or more autonomous mobile bodies is the automatic driving vehicles 21 to 2i. Further, examples of remote operators are operators P1 to Pk who use remote operator terminals 31 to 3j.
- the first information is information regarding the autonomous mobile body, and is information including, for example, the above-mentioned vehicle status information, surrounding environment information, map information, and/or route information.
- the second information is an autonomous mobile body that has been determined to require operation (more specifically, remote operation) or monitoring (more specifically, remote monitoring) by a remote operator during a predetermined period, that is, a remote intervention
- step S13 it is determined whether the second information is greater than or equal to a predetermined value (for example, the above-mentioned predetermined first threshold), that is, whether the number of autonomous mobile bodies requiring remote intervention is rapidly increasing in a predetermined period. It is determined whether or not.
- a predetermined value for example, the above-mentioned predetermined first threshold
- the third information is, for example, the above-mentioned vehicle control instruction, and is information for causing the autonomous mobile body to temporarily stop or the like.
- the fourth information is, for example, the above-mentioned alert display instruction, which is information for notifying the remote operator that the number of autonomous mobile bodies that require remote intervention in a predetermined period will increase rapidly.
- the fourth information is output to, for example, a terminal (for example, any of the remote operator terminals 31 to 3j), and the remote operator is notified of this through images and/or audio.
- the predetermined period is, for example, the above-mentioned predetermined time, and is a period from an arbitrarily determined first time point to a second time point.
- a sudden increase in remote intervention can be avoided by creating an instruction to avoid a sudden increase as third information and transmitting the created instruction to an autonomous mobile object.
- fourth information including image information and/or audio information that calls attention to the remote operator is output to a terminal operated by the remote operator, and the autonomous mobile body that requires remote intervention by the remote operator is The remote operator is notified in advance of the timing of sudden increases.
- the remote operator can prepare in advance to respond to a sudden increase in the number of remote interventions.
- the first information includes (1) fifth information regarding the state of the autonomous mobile body and the surrounding environment, (2) sixth information regarding the area in which the autonomous mobile body moves, and (3) information regarding the area in which the autonomous mobile body moves. It includes at least one of the seventh information regarding the route.
- the fifth information is, for example, the vehicle information described above.
- the sixth information is, for example, the above-mentioned map information.
- the seventh information is, for example, the route information described above.
- the second information can be estimated with high accuracy.
- the second information is greater than or equal to a predetermined value (for example, YES in S13)
- a predetermined value for example, YES in S13
- the predetermined control can be executed on one or more target autonomous mobile bodies in the output of at least one of the third information and the fourth information (for example, S15 to S18) described above.
- the third information is output to a remote operator.
- the fourth information is output to a terminal for notifying the user (S18).
- an autonomous mobile body can perform predetermined control such as temporary stop (for example, the predetermined vehicle control described above), remote intervention can be performed by having the autonomous mobile body perform the predetermined control.
- predetermined control such as temporary stop (for example, the predetermined vehicle control described above)
- remote intervention can be performed by having the autonomous mobile body perform the predetermined control.
- the rapid increase in the number of necessary autonomous mobile bodies can be suppressed.
- certain controls such as temporary stopping may not be possible.
- fourth information that alerts the remote operator is output to the terminal operated by the remote operator, and the remote operator can notify the remote operator of the timing of a rapid increase in the number of autonomous vehicles that require remote intervention.
- the operator will be notified in advance.
- the remote operator can prepare in advance to respond to a sudden increase in the number of remote interventions. Therefore, the burden on remote operators due to the rapid increase in remote interventions can be reduced.
- the predetermined value is 2 or more.
- the information processing method further acquires eighth information regarding the remote operator, and, based on the second information, instructs any of the two or more remote operators of the two or more target autonomous mobile bodies. It generates ninth information indicating the result of determining whether to operate or monitor, and outputs the ninth information to a terminal for notifying a remote operator. That is, based on the eighth information and the number of autonomous mobile bodies that require remote intervention, it may be determined which operator will perform remote intervention on which autonomous mobile body.
- the eighth information is, for example, the above-mentioned operator information, including information indicating which operator is using which terminal, information indicating the operator's skill level, and/or information including the operator's fatigue level. be.
- the ninth information is information indicating the result of determining which remote operator is to perform remote intervention on which target autonomous mobile body, that is, information indicating assignment of the remote intervention of the operator.
- the information processing device determines the assignment of which remote operator will respond to the autonomous mobile object that requires remote intervention, and for example, there is no need for the remote operators to decide between themselves. Therefore, the burden on the remote operator can be further reduced.
- the third information includes at least one of information that causes the target autonomous mobile body to temporarily stop, information that causes the target autonomous mobile body to change its speed, and information that causes the target autonomous mobile body to change the moving route. .
- the information processing method further includes, based on the first information, the degree of safety when the target autonomous mobile body executes a predetermined control for each of the two or more target autonomous mobile bodies; and generate tenth information indicating the result of calculating at least one of the degrees of influence on two or more autonomous mobile bodies when the target autonomous mobile body executes a predetermined control, and based on the tenth information, The above target autonomous mobile bodies are determined.
- an autonomous mobile body that executes a predetermined control has a safety degree that indicates the extent to which an autonomous mobile body can safely execute a predetermined control, and a safety level that indicates the degree to which an autonomous mobile body can safely execute a predetermined control, and a safety level that indicates how two or more autonomous mobile bodies can, for example, provide a service by executing a predetermined control.
- the decision may be made based on at least one of the degree of influence, such as the occurrence of a delay in the service when it is provided.
- a target autonomous mobile body with a high calculated safety degree is determined as the one or more target autonomous mobile bodies among the two or more target autonomous mobile bodies.
- a target autonomous mobile body having a lower calculated degree of influence among two or more target autonomous mobile bodies is determined as the one or more target autonomous mobile bodies.
- the fourth information includes at least one of information indicating a predetermined period and information regarding the third information.
- the remote operator can grasp the timing at which remote intervention increases rapidly or the type of travel the autonomous mobile body will perform.
- the information processing device includes an acquisition unit that acquires first information regarding the two or more autonomous mobile bodies, and based on the first information, for each of the two or more autonomous mobile bodies, in a predetermined period, an estimation unit that estimates second information indicating the number of target autonomous mobile bodies for which operation or monitoring by a remote operator is to be started among the two or more autonomous mobile bodies; a determination unit that makes a determination; when it is determined that the second information is equal to or greater than a predetermined value, third information for controlling one or more target autonomous mobile bodies of the two or more target autonomous mobile bodies; and a remote operator. and an output unit that outputs at least one of the fourth information for notifying the user.
- the acquisition unit and the estimation unit are realized, for example, by the remote intervention vehicle number transition estimation unit 121.
- the remote intervention vehicle number transition estimation unit 121 acquires the first information from the storage unit 13 or from the autonomous mobile body via the communication unit 11, for example.
- the determination unit is realized, for example, by the remote intervention rapid increase determination unit 122.
- the output unit is realized by, for example, at least one of the vehicle control determining unit 123 and the alert display determining unit 124. At least one of the vehicle control determining unit 123 and the alert display determining unit 124 outputs at least one of the third information and the fourth information to at least one of the target autonomous mobile body and the terminal via the communication unit 11.
- the present disclosure may be realized as a program that causes a computer to execute the above information processing method.
- the program according to one aspect of the present disclosure acquires, for each of the two or more autonomous mobile bodies, first information regarding the two or more autonomous mobile bodies, and based on the first information, in a predetermined period, estimating second information indicating the number of target autonomous mobile bodies for which operation or monitoring by a remote operator is to be started among the two or more autonomous mobile bodies, and determining whether the second information is equal to or greater than a predetermined value; If it is determined that the second information is equal to or greater than a predetermined value, third information for controlling one or more of the two or more target autonomous mobile bodies and a notification to a remote operator are provided.
- This is a program for a computer to execute an information processing method that outputs at least one of the fourth information.
- vehicle control e.g., temporary stop and/or deceleration
- the driving mode of the autonomous mobile body may be changed back to the original driving mode.
- the vehicle control instruction may also include the timing of starting traveling and/or accelerating to return the vehicle.
- the remote intervention rapid increase determination unit 122 may change (determine) the predetermined first threshold based on the service quality of the service provided by the automated driving vehicle. For example, if the service quality does not deteriorate when predetermined vehicle control is performed to avoid a sudden increase in remote interventions (for example, in the case of a product delivery service, the remote intervention sudden increase determination unit 122 determines whether the delivery completion time If there is no delay), the first threshold value may be adjusted to be smaller so that it is easier to determine that there is a sudden increase. For example, in a product delivery service, when all vehicles have completed delivery of products and are sending them to a hangar, the remote intervention sudden increase determination unit 122 performs predetermined vehicle control to avoid a sudden increase in remote intervention. The predetermined first threshold value is made small because the service quality does not deteriorate when this is implemented.
- the details of vehicle control may be determined so as to maintain service quality.
- the vehicle control determining unit 123 calculates the delivery delay times when the route of the autonomous mobile body is changed and when the autonomous mobile body is temporarily stopped. , the vehicle control with the shorter calculated delivery delay time is adopted.
- the vehicle control determining unit 123 gives priority to an autonomous mobile body that is forwarding the product without delivering it, over an autonomous mobile body that is currently delivering the product.
- Service information regarding the service of the autonomous mobile body may be obtained from, for example, a user interface of the autonomous mobile body or a terminal operated by an operator.
- vehicle control may be implemented to improve service quality within a range where a determination of a sudden increase in remote intervention does not occur.
- the vehicle control determining unit 123 accelerates the autonomous mobile body and/or generates a route change instruction such as changing to a shorter route than the original route such as taking a shortcut.
- the details of vehicle control may be determined so as to arrive at the destination earlier.
- the processing executed by a specific processing unit may be executed by another processing unit.
- the order of the plurality of processes may be changed, or the plurality of processes may be executed in parallel.
- each component of the processing unit such as the control unit 12 may be realized by executing a software program suitable for each component.
- Each component may be realized by a program execution unit such as a CPU or a processor reading and executing a software program recorded on a recording medium such as a hard disk or a semiconductor memory.
- each component may be realized by hardware.
- Each component may be a circuit (or integrated circuit). These circuits may constitute one circuit as a whole, or may be separate circuits. Further, each of these circuits may be a general-purpose circuit or a dedicated circuit.
- general or specific aspects of the present disclosure may be implemented in a system, apparatus, method, integrated circuit, computer program, or non-transitory storage medium such as a computer-readable CD-ROM. Further, the present invention may be realized by any combination of a system, an apparatus, a method, an integrated circuit, a computer program, and a recording medium.
- the present disclosure may be realized as an information processing method, or may be realized as a program for causing a computer to execute the information processing method, or may be readable by a computer recorded with such a program. It may also be realized as a non-temporary recording medium.
- the information processing device may be realized as a single device such as an information terminal, or may be realized by a plurality of devices.
- the components included in the remote monitoring/control server 1 described in the above embodiments may be distributed to the plurality of devices in any manner.
- the information processing method according to the present disclosure is useful as a method executed by a control device used to remotely monitor multiple automated driving vehicles.
- Remote monitoring/control server 4 Network 11, 211, 311 Communication unit 12, 214, 314 Control unit 121 Remote intervention vehicle number trend estimation unit 122 Remote intervention rapid increase determination unit 123 Vehicle control determination unit 124 Alert display determination unit 13, 215, 315 Storage unit 131 Control program storage unit 132 Vehicle information storage unit 133 Operator information storage unit 21-2i Automatic driving vehicle 212 Sensor unit 213 Drive unit 2141 Communication control unit 2142 Travel control unit 2151 Map information storage unit 2152 Route information storage unit 2153 Control Program storage section 216 Display section 217 Service provision section 31-3j Remote operator terminal 312 Output section 313 Input section 51-53 Remote intervention 61A, 62A, 63A, 73A Remote intervention start 61B, 62B, 63B Remote intervention end P1-Pk Operator
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Computing Systems (AREA)
- Operations Research (AREA)
- Business, Economics & Management (AREA)
- Accounting & Taxation (AREA)
- Development Economics (AREA)
- Economics (AREA)
- General Business, Economics & Management (AREA)
- Traffic Control Systems (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
Description
上記のように、オペレータが複数の自動運転車両を監視しているときに、自動運転車両の自律制御の継続が困難な状況においてオペレータが自動運転車両を遠隔操縦したり、歩行者又は他車両に対して道を譲るためにオペレータが自動運転車両に対して一時停止指示を出したりするといった遠隔介入が発生する。上記のような遠隔介入が短時間の間に複数発生する場合、遠隔介入を要請した複数の自動運転車両に対して遠隔介入を行う対応順序及び対応内容を決定する工程が必要になる。この場合、オペレータが情報把握するための情報量が急増することで、オペレータの精神的な負担が大きくなったり、対応決定に時間がかかることでその間に状況が変化して自動運転車両の運行に支障がでたりするといった課題が発生する。従来の技術では、オペレータが余裕をもって遠隔介入ができるように車両制御を行うことで同時に遠隔介入する車両数を調整するように車両制御を行うことについては開示されている。しかしながら、従来、遠隔介入が必要となる車両数が短時間の間に急増することに起因するオペレータへの負担を考慮して車両制御を行うことは考慮されていない。そのため、遠隔介入が必要となる車両数が短時間の間に急増することに起因するオペレータへの負担がある。したがって、このような原因によるオペレータへの負担を軽減させる手法については、改善が必要とされている。
[構成]
<全体概要>
図1は、本開示の実施の形態における制御システムの構成の一例を示すブロック図である。
図2は、図1に示す遠隔監視・制御サーバ1の構成の一例を示すブロック図である。
図3は、図1に示す自動運転車両21の構成の一例を示すブロック図である。
図4は、図1に示す遠隔オペレータ端末31の構成の一例を示すブロック図である。
続いて、遠隔介入車両数推移推定部121、遠隔介入急増判定部122、及び車両制御決定部123が実行する処理の具体例について説明する。
次に、上記のように構成された遠隔監視・制御サーバ1による遠隔介入の急増に起因するオペレータへの負担を軽減させる処理について説明する。
なお、上記遠隔介入の急増回避のために必要な最小車両数よりも多くの自動運転車両に対して、上記所定の車両制御を実施させるような構成でもよい。例えば、上記遠隔介入の急増回避のために必要な最小車両数が1台である場合、2台の自動運転車両に対して、上記所定の車両制御を実施させる。これによって、遠隔介入の急増が予測通りに回避できなくなる状況の発生頻度を低減させることができる。この場合、遠隔介入可能なオペレータの人数が少ない、又はオペレータの疲労度が大きいほど車両制御を実施する車両数が多くなるような構成であることが好ましい。
以上説明したように、実施の形態に係る情報処理方法は、情報処理装置における情報処理方法であって、2以上の自律移動体のそれぞれについて、2以上の自律移動体の走行に関する第1情報を取得し(例えば、S11)、第1情報に基づき、所定の期間において、2以上の自律移動体のうち遠隔オペレータによる操作又は監視が開始される対象自律移動体の数を示す第2情報を推定し(例えば、S12)、第2情報が所定の値以上であるか否かを判定し(例えば、S13)、第2情報が所定の値以上であると判定した場合(例えば、S13でYES)、2以上の対象自律移動体のうちの1以上の対象自律移動体を制御するための第3情報、及び遠隔オペレータへの通知を行うための第4情報の少なくとも一方を出力する(例えば、S15~S18)。
以上、実施の形態について説明したが、本開示は、上記実施の形態に限定されるものではない。
4 ネットワーク
11、211、311 通信部
12、214、314 制御部
121 遠隔介入車両数推移推定部
122 遠隔介入急増判定部
123 車両制御決定部
124 アラート表示決定部
13、215、315 記憶部
131 制御プログラム記憶部
132 車両情報記憶部
133 オペレータ情報記憶部
21~2i 自動運転車両
212 センサ部
213 駆動部
2141 通信制御部
2142 走行制御部
2151 地図情報記憶部
2152 経路情報記憶部
2153 制御プログラム記憶部
216 表示部
217 サービス提供部
31~3j 遠隔オペレータ端末
312 出力部
313 入力部
51~53 遠隔介入
61A、62A、63A、73A 遠隔介入開始
61B、62B、63B 遠隔介入終了
P1~Pk オペレータ
Claims (11)
- 情報処理装置における情報処理方法であって、
2以上の自律移動体のそれぞれについて、前記2以上の自律移動体に関する第1情報を取得し、
前記第1情報に基づき、所定の期間において、前記2以上の自律移動体のうち遠隔オペレータによる操作又は監視が開始される対象自律移動体の数を示す第2情報を推定し、
前記第2情報が所定の値以上であるか否かを判定し、
前記第2情報が所定の値以上であると判定した場合、2以上の前記対象自律移動体のうちの1以上の前記対象自律移動体を制御するための第3情報、及び前記遠隔オペレータへの通知を行うための第4情報の少なくとも一方を出力する、
情報処理方法。 - 前記第1情報は、(1)前記自律移動体の状態及び周囲環境に関する第5情報、(2)前記自律移動体が移動する領域に関する第6情報、並びに(3)前記自律移動体が移動する経路に関する第7情報のうちの少なくともいずれかを含む、
請求項1に記載の情報処理方法。 - 前記第2情報が所定の値以上であると判定した場合、さらに、前記第1情報に基づいて、前記対象自律移動体に所定の制御を実行可能であるか否かを判定し、
前記第3情報、及び第4情報の少なくとも一方の出力では、1以上の前記対象自律移動体に所定の制御を実行可能であると判定した場合、前記第3情報を1以上の前記対象自律移動体に出力し、1以上の前記対象自律移動体に所定の制御を実行可能ではないと判定した場合、前記遠隔オペレータへの通知を行うための端末に前記第4情報に出力する、
請求項1に記載の情報処理方法。 - 前記所定の値は、2以上であり、
前記情報処理方法は、さらに、
前記遠隔オペレータに関する第8情報を取得し、
前記第2情報に基づいて、2以上の前記遠隔オペレータのいずれに、2以上の前記対象自律移動体の操作又は監視をさせるかを決定した結果を示す第9情報を生成し、
前記遠隔オペレータへの通知を行うための端末に前記第9情報を出力する、
請求項1に記載の情報処理方法。 - 前記第3情報は、前記対象自律移動体に一時停止させる情報、前記対象自律移動体に速度変更させる情報、及び前記対象自律移動体に移動する経路を変更させる情報のうちの少なくともいずれかを含む、
請求項1に記載の情報処理方法。 - さらに、前記第1情報に基づいて、2以上の前記対象自律移動体のそれぞれについて、前記対象自律移動体が所定の制御を実行した場合の安全度、及び前記対象自律移動体が前記所定の制御を実行した場合の前記2以上の自律移動体への影響度のうちの少なくとも一方を算出した結果を示す第10情報を生成し、
前記第10情報に基づいて、1以上の前記対象自律移動体を決定する、
請求項1に記載の情報処理方法。 - 1以上の前記対象自律移動体の決定では、2以上の前記対象自律移動体のうち、算出した安全度が高い対象自律移動体を1以上の前記対象自律移動体に決定する、
請求項6に記載の情報処理方法。 - 1以上の前記対象自律移動体の決定では、2以上の前記対象自律移動体のうち、算出した影響度が低い対象自律移動体を1以上の前記対象自律移動体に決定する、
請求項6に記載の情報処理方法。 - 前記第4情報は、前記所定の期間を示す情報、及び前記第3情報に関する情報のうちの少なくともいずれかを含む、
請求項1~8のいずれか1項に記載の情報処理方法。 - 2以上の自律移動体のそれぞれについて、前記2以上の自律移動体に関する第1情報を取得する取得部と、
前記第1情報に基づき、所定の期間において、前記2以上の自律移動体のうち遠隔オペレータによる操作又は監視が開始される対象自律移動体の数を示す第2情報を推定する推定部と、
前記第2情報が所定の値以上であるか否かを判定する判定部と、
前記第2情報が所定の値以上であると判定した場合、2以上の前記対象自律移動体のうちの1以上の前記対象自律移動体を制御するための第3情報、及び前記遠隔オペレータへの通知を行うための第4情報の少なくとも一方を出力する出力部と、を備える、
情報処理装置。 - 2以上の自律移動体のそれぞれについて、前記2以上の自律移動体に関する第1情報を取得し、
前記第1情報に基づき、所定の期間において、前記2以上の自律移動体のうち遠隔オペレータによる操作又は監視が開始される対象自律移動体の数を示す第2情報を推定し、
前記第2情報が所定の値以上であるか否かを判定し、
前記第2情報が所定の値以上であると判定した場合、2以上の前記対象自律移動体のうちの1以上の前記対象自律移動体を制御するための第3情報、及び前記遠隔オペレータへの通知を行うための第4情報の少なくとも一方を出力する、情報処理方法をコンピュータが実行するための
プログラム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202380039679.2A CN119173925A (zh) | 2022-05-17 | 2023-05-10 | 信息处理方法、信息处理装置、以及程序 |
| EP23807511.3A EP4528689B1 (en) | 2022-05-17 | 2023-05-10 | Information processing method, information processing device, and program |
| JP2024521695A JPWO2023223907A1 (ja) | 2022-05-17 | 2023-05-10 | |
| US18/938,641 US20250060751A1 (en) | 2022-05-17 | 2024-11-06 | Information processing method, information processing device, and recording medium |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022-081106 | 2022-05-17 | ||
| JP2022081106 | 2022-05-17 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US18/938,641 Continuation US20250060751A1 (en) | 2022-05-17 | 2024-11-06 | Information processing method, information processing device, and recording medium |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023223907A1 true WO2023223907A1 (ja) | 2023-11-23 |
Family
ID=88835238
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/017549 Ceased WO2023223907A1 (ja) | 2022-05-17 | 2023-05-10 | 情報処理方法、情報処理装置、及びプログラム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20250060751A1 (ja) |
| EP (1) | EP4528689B1 (ja) |
| JP (1) | JPWO2023223907A1 (ja) |
| CN (1) | CN119173925A (ja) |
| WO (1) | WO2023223907A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2025177701A1 (ja) * | 2024-02-21 | 2025-08-28 | パナソニックIpマネジメント株式会社 | オペレータ選択方法、端末装置およびプログラム |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7786329B2 (ja) * | 2022-10-21 | 2025-12-16 | トヨタ自動車株式会社 | 遠隔制御支援装置 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019021200A (ja) * | 2017-07-20 | 2019-02-07 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカPanasonic Intellectual Property Corporation of America | 制御装置、制御方法、制御プログラム及び制御システム |
| JP2020154631A (ja) | 2019-03-19 | 2020-09-24 | トヨタ自動車株式会社 | 遠隔制御装置及び自動運転システム |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6133345B2 (ja) * | 2015-03-23 | 2017-05-24 | 本田技研工業株式会社 | 車両用衝突回避支援装置 |
| US11137754B2 (en) * | 2018-10-24 | 2021-10-05 | Ford Global Technologies, Llc | Intermittent delay mitigation for remote vehicle operation |
| JP7310764B2 (ja) * | 2020-09-11 | 2023-07-19 | トヨタ自動車株式会社 | 配車システム、配車サーバ、及び配車方法 |
-
2023
- 2023-05-10 EP EP23807511.3A patent/EP4528689B1/en active Active
- 2023-05-10 WO PCT/JP2023/017549 patent/WO2023223907A1/ja not_active Ceased
- 2023-05-10 JP JP2024521695A patent/JPWO2023223907A1/ja not_active Withdrawn
- 2023-05-10 CN CN202380039679.2A patent/CN119173925A/zh active Pending
-
2024
- 2024-11-06 US US18/938,641 patent/US20250060751A1/en active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019021200A (ja) * | 2017-07-20 | 2019-02-07 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカPanasonic Intellectual Property Corporation of America | 制御装置、制御方法、制御プログラム及び制御システム |
| JP2020154631A (ja) | 2019-03-19 | 2020-09-24 | トヨタ自動車株式会社 | 遠隔制御装置及び自動運転システム |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4528689A4 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2025177701A1 (ja) * | 2024-02-21 | 2025-08-28 | パナソニックIpマネジメント株式会社 | オペレータ選択方法、端末装置およびプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4528689B1 (en) | 2026-04-15 |
| US20250060751A1 (en) | 2025-02-20 |
| CN119173925A (zh) | 2024-12-20 |
| JPWO2023223907A1 (ja) | 2023-11-23 |
| EP4528689A4 (en) | 2025-07-16 |
| EP4528689A1 (en) | 2025-03-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112540592B (zh) | 用于确保安全的具有双自主驾驶系统的自主驾驶车辆 | |
| US11724708B2 (en) | Fail-safe handling system for autonomous driving vehicle | |
| JP6310565B2 (ja) | 運転支援装置 | |
| CN112180911B (zh) | 用于监控自动驾驶车辆的控制系统的方法 | |
| US20250060751A1 (en) | Information processing method, information processing device, and recording medium | |
| CN113391629A (zh) | 利用安全冗余自动系统增强路径障碍物检测的方法 | |
| CN113548043B (zh) | 用于自主车辆的安全操作员的碰撞告警系统和方法 | |
| CN115935573A (zh) | 用于自动驾驶车辆的仿真方法和控制自动驾驶车辆的方法 | |
| US20240210939A1 (en) | Camera image compression for autonomous driving vehicles | |
| US11580789B2 (en) | System load based safety operator warning system | |
| CN113533876B (zh) | 用于执行自主驾驶车辆的电磁兼容性测试的方法和系统 | |
| US11897503B2 (en) | Method and apparatus for detecting unexpected control state in autonomous driving system | |
| CN113353005B (zh) | 用于处理自动驾驶系统与车辆之间的通信延迟的系统 | |
| EP3889944A1 (en) | A vehicle, fleet management and traffic light interaction architecture design via v2x | |
| US12552406B2 (en) | Dual path ethernet-based sensor device fault monitoring | |
| CN113492848B (zh) | 用于自主驾驶车辆安全操作员的前方碰撞告警警报系统 | |
| WO2023176903A1 (ja) | 情報出力方法、プログラム、及び情報出力システム | |
| US12386773B2 (en) | Peripheral component interconnect express device reset for autonomous driving systems | |
| KR102787706B1 (ko) | 자율 주행 운전 모드 관여 | |
| JP7422894B2 (ja) | サーバ選出装置およびサーバ選出システム | |
| CN113815525B (zh) | 用于车辆强制制动的l3级自动应急灯系统 | |
| JP2019125135A (ja) | 車両の自動運転制御システム | |
| WO2025023026A1 (ja) | 車両の制御システム、車両の制御方法、走行監視システム、走行監視方法、及びプログラム | |
| JP2025157801A (ja) | 車両制御装置及び車両制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23807511 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2024521695 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023807511 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2023807511 Country of ref document: EP Effective date: 20241217 |
|
| WWG | Wipo information: grant in national office |
Ref document number: 2023807511 Country of ref document: EP |