BR102020007454A2 - Colheitadeira, e, plataformas de colheita - Google Patents
Colheitadeira, e, plataformas de colheita Download PDFInfo
- Publication number
- BR102020007454A2 BR102020007454A2 BR102020007454-7A BR102020007454A BR102020007454A2 BR 102020007454 A2 BR102020007454 A2 BR 102020007454A2 BR 102020007454 A BR102020007454 A BR 102020007454A BR 102020007454 A2 BR102020007454 A2 BR 102020007454A2
- Authority
- BR
- Brazil
- Prior art keywords
- locking mechanism
- section
- wing
- respect
- response
- Prior art date
Links
Images










Classifications
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D75/00—Accessories for harvesters or mowers
- A01D75/28—Control mechanisms for harvesters or mowers when moving on slopes; Devices preventing lateral pull
- A01D75/287—Control mechanisms for harvesters or mowers when moving on slopes; Devices preventing lateral pull acting on the mowing table
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D41/00—Combines, i.e. harvesters or mowers combined with threshing devices
- A01D41/06—Combines with headers
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01B—SOIL WORKING IN AGRICULTURE OR FORESTRY; PARTS, DETAILS, OR ACCESSORIES OF AGRICULTURAL MACHINES OR IMPLEMENTS, IN GENERAL
- A01B63/00—Lifting or adjusting devices or arrangements for agricultural machines or implements
- A01B63/02—Lifting or adjusting devices or arrangements for agricultural machines or implements for implements mounted on tractors
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D41/00—Combines, i.e. harvesters or mowers combined with threshing devices
- A01D41/12—Details of combines
- A01D41/14—Mowing tables
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D41/00—Combines, i.e. harvesters or mowers combined with threshing devices
- A01D41/12—Details of combines
- A01D41/14—Mowing tables
- A01D41/141—Automatic header control
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D34/00—Mowers; Mowing apparatus of harvesters
- A01D34/01—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus
- A01D34/02—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus having reciprocating cutters
- A01D34/13—Cutting apparatus
- A01D34/14—Knife-bars
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D61/00—Elevators or conveyors for binders or combines
- A01D61/002—Elevators or conveyors for binders or combines transversal conveying devices
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Environmental Sciences (AREA)
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Soil Sciences (AREA)
- Harvester Elements (AREA)
- Lifting Devices For Agricultural Implements (AREA)
Abstract
uma plataforma de colheita inclui uma primeira seção e se estende ao longo de um primeiro plano de seção que é substancialmente paralelo a uma superfície de solo ao longo da qual a plataforma de colheita se move com uma combinada. uma segunda seção é conectada ao primeiro lado da primeira seção, e gira com relação à primeira seção dentro de uma faixa de posições angulares. um mecanismo de travamento mantém a segunda seção em uma posição com relação à primeira seção, enquanto ativado, e permite o movimento da segunda seção com relação à primeira seção, enquanto desativado. um controlador recebe um primeiro sinal indicativo da posição, e envia um segundo sinal para desativar o mecanismo de travamento em resposta à posição estando em um ângulo não paralelo positivo com relação a um primeiro plano de seção. a segunda seção se move na direção de um primeiro plano de seção em resposta à gravidade, enquanto o mecanismo de travamento está desativado.
Description
[001] A presente invenção se refere a colheitadeiras e nivelamento de asa para colheitadeiras.
[002] Em algumas modalidades, a invenção provê a colheitadeira incluindo uma combinada tendo uma máquina motriz que move a combinada sobre uma superfície de solo em uma direção de deslocamento e um alimentador que define uma linha central. Uma plataforma de colheita é conectada à combinada para o movimento com a combinada sobre a superfície de solo. A plataforma de colheita inclui uma seção central conectada à combinada, que tem um primeiro lado e um segundo lado oposto ao primeiro lado. A seção central se estende ao longo de um plano de seção central que é substancialmente perpendicular à linha central do alimentador. Uma primeira asa é conectada ao primeiro lado da seção central e é rotativa com relação à seção central dentro de uma primeira faixa de posições angulares. Um primeiro mecanismo de travamento mantém uma primeira asa em uma primeira posição com relação à seção central, enquanto o primeiro mecanismo de travamento está ativado e permite o movimento da primeira asa com relação à seção central, enquanto o primeiro mecanismo de travamento está desativado. Uma segunda asa é conectada ao segundo lado da seção central e é rotativa com relação à seção central dentro de uma segunda faixa de posições angulares. Um segundo mecanismo de travamento mantém a segunda asa em uma segunda posição com relação à seção central, enquanto o segundo mecanismo de travamento está ativado e permite o movimento da segunda asa com relação à seção central, enquanto o segundo mecanismo de travamento está desativado. Um controlador recebe um primeiro sinal indicativo da primeira posição e um segundo sinal indicativo da segunda posição. O controlador envia um terceiro sinal para o primeiro mecanismo de travamento para desativar o primeiro mecanismo de travamento em resposta à primeira posição estando em um ângulo não paralelo positivo com relação ao plano de seção central, e envia um quarto sinal para o segundo mecanismo de travamento para desativar o segundo mecanismo de travamento em resposta à segunda posição estando em um ângulo não paralelo positivo com relação ao plano de seção central. Uma primeira asa se move na direção do plano de seção central em resposta à gravidade, enquanto o primeiro mecanismo de travamento está desativado, e a segunda asa se move na direção do plano de seção central em resposta à gravidade, enquanto o segundo mecanismo de travamento está desativado.
[003] Em algumas modalidades, a invenção provê uma plataforma de colheita que pode ser conectada a uma combinada para o movimento com a combinada sobre uma superfície de solo em uma direção de deslocamento. A plataforma de colheita inclui uma seção central conectada à combinada, que tem um primeiro lado e um segundo lado oposto ao primeiro lado. A seção central se estende ao longo de um plano de seção central que é substancialmente paralelo à superfície de solo. Uma primeira asa é conectada ao primeiro lado da seção central e é rotativa com relação à seção central dentro de uma primeira faixa de posições angulares. Um primeiro mecanismo de travamento mantém uma primeira asa em uma primeira posição com relação à seção central, enquanto o primeiro mecanismo de travamento está ativado e permite o movimento da primeira asa com relação à seção central, enquanto o primeiro mecanismo de travamento está desativado. Uma segunda asa é conectada ao segundo lado da seção central e é rotativa com relação à seção central dentro de uma segunda faixa de posições angulares. Um segundo mecanismo de travamento mantém a segunda asa em uma segunda posição com relação à seção central, enquanto o segundo mecanismo de travamento está ativado e permite o movimento da segunda asa com relação à seção central, enquanto o segundo mecanismo de travamento está desativado.
Um controlador recebe um primeiro sinal indicativo da primeira posição e um segundo sinal indicativo da segunda posição. O controlador envia um terceiro sinal para o primeiro mecanismo de travamento para desativar o primeiro mecanismo de travamento em resposta à primeira posição estando em um ângulo não paralelo positivo com relação ao plano de seção central, e envia um quarto sinal para o segundo mecanismo de travamento para desativar o segundo mecanismo de travamento em resposta à segunda posição estando em um ângulo não paralelo positivo com relação ao plano de seção central. Uma primeira asa se move na direção do plano de seção central em resposta à gravidade, enquanto o primeiro mecanismo de travamento está desativado, e a segunda asa se move na direção do plano de seção central em resposta à gravidade, enquanto o segundo mecanismo de travamento está desativado.
Um controlador recebe um primeiro sinal indicativo da primeira posição e um segundo sinal indicativo da segunda posição. O controlador envia um terceiro sinal para o primeiro mecanismo de travamento para desativar o primeiro mecanismo de travamento em resposta à primeira posição estando em um ângulo não paralelo positivo com relação ao plano de seção central, e envia um quarto sinal para o segundo mecanismo de travamento para desativar o segundo mecanismo de travamento em resposta à segunda posição estando em um ângulo não paralelo positivo com relação ao plano de seção central. Uma primeira asa se move na direção do plano de seção central em resposta à gravidade, enquanto o primeiro mecanismo de travamento está desativado, e a segunda asa se move na direção do plano de seção central em resposta à gravidade, enquanto o segundo mecanismo de travamento está desativado.
[004] Em algumas modalidades a invenção provê uma plataforma de colheita conectada a uma combinada para o movimento com a combinada sobre uma superfície de solo em uma direção de deslocamento. A plataforma de colheita inclui uma primeira seção conectada à combinada. Uma primeira seção tem um primeiro lado e um segundo lado oposto ao primeiro lado, e uma primeira seção se estende ao longo de um primeiro plano de seção que é substancialmente paralelo à superfície de solo. Uma segunda seção é conectada ao primeiro lado da primeira seção, e é rotativa com relação à primeira seção dentro de uma faixa de posições angulares. Um mecanismo de travamento mantém a segunda seção em uma posição com relação à primeira seção, enquanto o mecanismo de travamento está ativado, e permite o movimento da segunda seção com relação à primeira seção, enquanto o mecanismo de travamento está desativado. Um controlador recebe um primeiro sinal indicativo da posição, e envia um segundo sinal para o mecanismo de travamento para desativar o mecanismo de travamento em resposta à posição estando em um ângulo não paralelo positivo com relação a um primeiro plano de seção. A segunda seção se move na direção de um primeiro plano de seção em resposta à gravidade, enquanto o mecanismo de travamento está desativado.
[005] Outros aspectos da invenção se tornarão aparentes pela consideração da descrição detalhada e desenhos anexos.
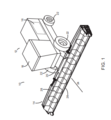
[006] A Figura 1 é uma vista em perspectiva de uma colheitadeira.
[007] A Figura 2 é uma vista em perspectiva de uma plataforma de colheita.
[008] A Figura 3 é uma vista dianteira esquemática da plataforma de colheita.
[009] A Figura 4 é uma vista esquemática das asas conectadas a uma seção central.
[0010] A Figura 5 é uma vista esquemática das asas flutuando para cima.
[0011] A Figura 6 é uma vista esquemática das asas flutuando para baixo.
[0012] A Figura 7 é uma vista esquemática de um circuito de asa destravado com uma primeira asa em uma posição de operação.
[0013] A Figura 8 é uma vista esquemática de um circuito de asa destravado com a segunda asa em uma posição de operação.
[0014] A Figura 9 é uma vista esquemática de um circuito de asa travado com uma primeira asa em uma posição elevada.
[0015] A Figura 10 é uma vista esquemática de um circuito de asa travado com a segunda asa em uma posição elevada.
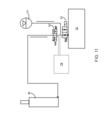
[0016] A Figura 11 é uma vista esquemática de um circuito de asa destravado com uma primeira asa em uma posição elevada.
[0017] A Figura 12 é uma vista esquemática de um circuito de asa destravado com a segunda asa em uma posição elevada.
[0018] Antes de quaisquer modalidades da invenção serem explicadas em detalhes, deve ser entendido que a invenção não é limitada em sua aplicação aos detalhes de construção e ao arranjo de componentes expostos na seguinte descrição ou ilustrados nos seguintes desenhos. A invenção é capaz de outras modalidades e de ser praticada ou realizada de diversas maneiras.
[0019] A Figura 1 ilustra uma colheitadeira 10 de acordo com algumas modalidades. A colheitadeira ilustrada 10 inclui uma combinada 12 e uma plataforma de colheita 14. A combinada 12 inclui uma máquina motriz 16, uma cabina 18, um alimentador 20, e uma pluralidade de dispositivos de engate ao solo 22. A máquina motriz 16 é configurada para mover a combinada 12 em uma direção de deslocamento 24 por intermédio dos dispositivos de engate ao solo 22. Os dispositivos de engate ao solo 22 ilustrados são rodas, mas lagartas ou outros dispositivos de engate ao solo apropriados podem ser utilizados.
[0020] A plataforma de colheita 14 inclui uma barra de cortadores 26, que é configurada para cortar grão sendo colhido, e um carretel 28 que é configurado para comprimir o grão contra a barra de cortadores para assim cortar o grão.
[0021] A Figura 2 mostra a plataforma de colheita 14 em maiores detalhes. A plataforma de colheita 14 inclui um primeiro conjunto transportador 30, um segundo conjunto transportador 32, e um terceiro conjunto transportador 34. O primeiro conjunto transportador 30 é configurado para mover grão colhido geralmente perpendicular à direção de deslocamento 24 na direção do terceiro conjunto transportador 34. O segundo conjunto transportador 32 é configurado para mover grão colhido geralmente perpendicular à direção de deslocamento 24 na direção do terceiro conjunto transportador 34. O terceiro conjunto transportador 34 é configurado para mover grão colhido oposto à direção de deslocamento 24 e para dentro do alimentador 20 (ver a Figura 1).
[0022] A Figura 3 mostra a plataforma de colheita 14 tendo uma seção central 40, uma primeira asa 42 e uma segunda asa 44, todas as quais são suportadas em uma superfície de solo 46. A seção central 40 é conectada ao alimentador 20 da combinada 12 e é permitida que pivote em torno de um ângulo relativamente pequeno (isto é, menor que cerca de +/- 5 graus) com relação ao alimentador 20, de forma que a seção central 40 seja substancialmente alinhada com o alimentador 20 e a combinada 12. A seção central 40 se estende ao longo de um plano de seção central 48 e inclui primeiro e segundo pontos de pivô 50, 52 posicionados dentro do plano de seção central 48. Em algumas modalidades, o alimentador 20 define uma linha central 53 se estendendo verticalmente através do alimentador 20 e é substancialmente perpendicular ao plano de seção central 48. Substancialmente perpendicular é definido aqui como estando entre 85 e 95 graus.
[0023] Uma primeira asa 42 é conectada à seção central 40 por braços de controle de asa 54a, 54b. Os braços de controle de asa 54a, 54b são conectados ao primeiro ponto de pivô 50 da seção central 40. Uma primeira asa 42 é suportada em duas rodas de engate ao solo 56 que se movem ao longo da superfície de solo 46. As rodas de engate ao solo 56 suportam muito do peso da primeira asa 42 durante a operação de forma que as rodas de engate ao solo 56 determinem a altura da primeira asa 42 acima da superfície de solo 46. Durante a operação, uma primeira asa 42 é permitida que pivote dentro de uma primeira faixa de ângulos com relação à seção central 40. Em algumas modalidades, uma primeira faixa de ângulos é entre em torno de +/-15 graus com relação à seção central 40. Em algumas modalidades, uma primeira faixa de ângulos é entre em torno de +/-10 graus com relação à seção central 40. Em algumas modalidades, uma primeira faixa de ângulos é entre em torno de +/-5 graus com relação à seção central 40.
[0024] A segunda asa 44 é conectada à seção central 40 por braços de controle de asa 60a, 60b. Os braços de controle de asa 60a, 60b são conectados ao segundo ponto de pivô 52 da seção central 40. A segunda asa 44 é suportada em duas rodas de engate ao solo 62 que se movem ao longo da superfície de solo 46. As rodas de engate ao solo 62 suportam muito do peso da segunda asa 44 durante a operação de forma que as rodas de engate ao solo 62 ajustem a altura da segunda asa 44 acima da superfície de solo 46. Durante a operação, a segunda asa 44 é permitida que pivote dentro de uma segunda faixa de ângulos com relação à seção central 40. Em algumas modalidades, a segunda faixa de ângulos é entre em torno de +/-15 graus com relação à seção central 40. Em algumas modalidades, a segunda faixa de ângulos é entre em torno de +/-10 graus com relação à seção central 40. Em algumas modalidades, a segunda faixa de ângulos é entre em torno de +/-5 graus com relação à seção central 40.
[0025] A primeira asa 42 e a segunda asa 44 podem pivotar independentemente de forma que uma primeira asa 42 possa pivotar dentro da primeira faixa de ângulos, enquanto a segunda asa 44 pivota independentemente dentro da segunda faixa de ângulos.
[0026] A Figura 4 ilustra um sistema de flutuação de asa para a seção central 40, uma primeira asa 42 e a segunda asa 44. Uma primeira asa 42 é conectada à seção central 40 pelos braços de controle de asa 54a, 54b e um primeiro cilindro 68. O primeiro cilindro 68 inclui uma primeira extremidade conectada à primeira asa 42 e uma segunda extremidade que é conectada tanto à seção central 40 quanto a uma primeira asa 42. O primeiro cilindro 68 é fluidamente conectado a um primeiro acumulador 70 de forma que, quando uma primeira asa 42 está em uma posição nivelada (substancialmente paralela ao plano de seção central 48) uma pressão no primeiro acumulador 70 provê uma força para o primeiro cilindro 68 suportar uma porção do peso da primeira asa 42.
[0027] A segunda asa 44 é conectada à seção central 40 pelos braços de controle de asa 60a, 60b e um segundo cilindro 72. O segundo cilindro 72 inclui uma primeira extremidade conectada à segunda asa 44 e uma segunda extremidade que é conectada tanto à seção central 40 quanto à segunda asa 44. O segundo cilindro 72 é fluidamente conectado a um segundo acumulador 74 de forma que, quando a segunda asa 44 está em uma posição nivelada (substancialmente paralela ao plano de seção central 48), uma pressão no segundo acumulador 74 provê uma força para o segundo cilindro 72 suportar uma porção do peso da segunda asa 44.
[0028] A Figura 5 ilustra o sistema de flutuação de asa quanto tanto a primeira asa 42 quanto a segunda asa 44 encontram uma entrada (como uma colina ou ondulação na superfície de solo 46) e deslocamento para cima. A primeira asa 42 é empurrada para cima pelas rodas de engate ao solo 56 se movendo para cima em resposta à entrada. Fluido é puxado do primeiro acumulador 70 para dentro do primeiro cilindro 68 em resposta ao movimento para cima da primeira asa 42. A pressão no primeiro acumulador 70 é mais baixa quando uma primeira asa 42 está acima de uma posição nivelada (isto é, em um ângulo não paralelo positivo com relação ao plano de seção central 48). A segunda asa 44 é empurrada para cima pelas rodas de engate ao solo 62 se movendo para cima em resposta à entrada. Fluido é puxado do segundo acumulador 74 para dentro do segundo cilindro 72 em resposta ao movimento para cima da segunda asa 44. A pressão no segundo acumulador 74 é mais baixa quando a segunda asa 44 está acima de uma posição nivelada (isto é, em um ângulo não paralelo positivo com relação ao plano de seção central 48).
[0029] A Figura 6 ilustra o sistema de flutuação de asa quando uma primeira asa 42 encontra uma entrada (como um rebaixo ou vale na superfície de solo 46) e deslocamentos para baixo. Uma primeira asa 42 é empurrada para baixo por gravidade até as rodas de engate ao solo 56 engatarem a superfície de solo 46. Fluido é movido do primeiro cilindro 68 para dentro do primeiro acumulador 70 em resposta ao movimento para baixo da primeira asa 42. A pressão no primeiro acumulador 70 é maior quando a primeira asa 42 está abaixo de uma posição nivelada (isto é, em um ângulo não paralelo negativo com relação ao plano de seção central 48). As rodas de engate ao solo 56 e o primeiro cilindro 68 suportam o peso da primeira asa 42. O primeiro acumulador 70 permite o ajuste passivo da primeira asa 42 dentro da primeira faixa de ângulos, como descrito acima. A segunda asa 44 é empurrada para baixo por gravidade até as rodas de engate ao solo 62 engatarem a superfície de solo 46. Fluido é movido a partir do segundo cilindro 72 para dentro do segundo acumulador 74 em resposta ao movimento para baixo da segunda asa 44. A pressão no segundo acumulador 74 é maior quando a segunda asa 44 está abaixo de uma posição nivelada (isto é, em um ângulo não paralelo negativo com relação ao plano de seção central 48). As rodas de engate ao solo 62 e o segundo cilindro 72 suportam o peso da segunda asa 44. O segundo acumulador 74 permite o ajuste passivo da segunda asa 44 dentro da segunda faixa de ângulos, como descrito acima.
[0030] A Figura 7 ilustra um primeiro circuito hidráulico incluindo o primeiro cilindro 68, o primeiro acumulador 70, um reservatório de fluido 76, um controlador 78, uma primeira válvula 80 e uma segunda válvula 82. O controlador 78 é eletricamente conectado a uma primeira válvula 80 para enviar sinais para a primeira válvula 80 para abrir e fechar a primeira válvula 80. Fluxo flui entre o primeiro cilindro 68 e o primeiro acumulador 70, enquanto a primeira válvula 80 está aberta e é inibido de fluir entre o primeiro cilindro 68 e o primeiro acumulador 70 enquanto a primeira válvula 80 está fechada.
[0031] O controlador 78 é também eletricamente conectado à segunda válvula 82 para enviar sinais para a segunda válvula 82 para abrir e fechar a segunda válvula 82. Fluxo flui entre o reservatório 76 e o primeiro acumulador 70 enquanto a segunda válvula 82 está aberta e é inibido de fluir entre o reservatório 76 e o primeiro acumulador 70 enquanto a segunda válvula 82 está fechada. Enquanto tanto a primeira válvula 80 quanto a segunda válvula 82 estão abertas, fluido é permitido que flua entre o primeiro cilindro 68, o primeiro acumulador 70 e o reservatório 76. Durante a operação normal, como mostrada nas Figuras 4 a 6, a primeira válvula 80 é aberta para permitir fluxo de fluido entre o primeiro cilindro 68 e o primeiro acumulador 70 para permitir que uma primeira asa 42 seja passivamente elevada e abaixada em resposta a alterações no terreno.
[0032] A Figura 8 ilustra um segundo circuito hidráulico incluindo o segundo cilindro 72, o segundo acumulador 74, o reservatório de fluido 76, o controlador 78, uma terceira válvula 84, e uma quarta válvula 86. O controlador 78 é eletricamente conectado à terceira válvula 84 para enviar sinais para a terceira válvula 84 para abrir e fechar a terceira válvula 84. Fluxo flui entre o segundo cilindro 72 e o segundo acumulador 74 enquanto a terceira válvula 84 está aberta e é inibido de fluir entre o segundo cilindro 72 e o segundo acumulador 74 enquanto a terceira válvula 84 está fechada.
[0033] O controlador 78 é também eletricamente conectado à quarta válvula 86 para enviar sinais para a quarta válvula 86 para abrir e fechar a quarta válvula 86. Fluxo flui entre o reservatório 76 e o segundo acumulador 74 enquanto a quarta válvula 86 está aberta e é inibido de fluir entre o reservatório 76 e o segundo acumulador 74 enquanto a quarta válvula 86 está fechada. Enquanto tanto a terceira válvula 84 quanto a quarta válvula 86 estão abertas, fluido é permitido que flua entre o segundo cilindro 72, o segundo acumulador 74 e o reservatório 76. Durante a operação normal, como mostrada nas Figuras 4 a 6, a terceira válvula 84 é aberta para permitir fluxo de fluido entre o segundo cilindro 72 e o segundo acumulador 74 para permitir que a segunda asa 44 seja passivamente elevada e abaixada em resposta a alterações no terreno.
[0034] O reservatório 76 funciona como um acumulador secundário para permitir a regulagem de pressão entre o primeiro cilindro 68 e o primeiro acumulador 70 bem como entre o segundo cilindro 72 e o segundo acumulador 74. O reservatório 76 também funciona como fonte de fluido quando uma bomba é utilizada para direcionar fluido para dentro do primeiro cilindro 68 para automaticamente elevar a primeira asa 42, ou para dentro do segundo cilindro 72 para automaticamente elevar a segunda asa 44.
[0035] A Figura 9 ilustra o primeiro circuito hidráulico, no qual uma primeira válvula 80 foi fechada em resposta a um sinal do controlador 78. Por exemplo, quando o operador seleciona uma operação de transporte da colheitadeira 10, a colheitadeira 10 muda de colheita para transporte. O controlador 78 envia um sinal para uma primeira válvula 80 fechar, para manter assim uma primeira asa 42 na posição em que uma primeira asa 42 estava no momento quando a colheita foi concluída.
[0036] A Figura 10 ilustra o segundo circuito hidráulico, no qual a terceira válvula 84 foi fechada em resposta a um sinal do controlador 78. Por exemplo, quando o operador seleciona uma operação de transporte da colheitadeira 10, a colheitadeira 10 muda de colheita para transporte. O controlador 78 envia um sinal para a terceira válvula 84 para fechar, para manter assim a segunda asa 44 na posição em que a segunda asa 44 estava no momento quando a colheita foi concluída.
[0037] O controlador 78 recebe um primeiro sinal indicativo da primeira posição da primeira asa 42. Se uma primeira asa 42 for mantida em uma posição elevada, como a posição mostrada na Figura 5 (isto é, em um ângulo não paralelo positivo com relação ao plano de seção central 48), então o controlador 78 envia um sinal para uma primeira válvula 80 para abrir a primeira válvula 80. Enquanto a primeira válvula 80 está aberta, fluido é permitido que se mova do primeiro cilindro 68 através de uma primeira válvula 80 para dentro do primeiro acumulador 70, conforme mostrado na Figura 11. Fluido é movido em resposta à gravidade puxando para baixo contra uma primeira asa 42 para assim abaixar passivamente a primeira asa 42 quando a primeira válvula 80 é aberta. O controlador 78 continua a receber o primeiro sinal indicativo da primeira posição da primeira asa 42. Se uma primeira posição da primeira asa 42 estiver em uma posição nivelada ou abaixada (isto é, substancialmente paralela ao plano de seção central 48 ou em um ângulo não paralelo negativo com relação ao plano de seção central 48), então o controlador 78 envia um sinal para a primeira válvula 80 para fechar a primeira válvula 80. Enquanto a primeira válvula 80 está fechada, fluido é inibido de se mover do primeiro cilindro 68 através da primeira válvula 80 para dentro do primeiro acumulador 70, conforme mostrado na Figura 9.
[0038] O controlador 78 também recebe um segundo sinal indicativo da segunda posição da segunda asa 44. Se a segunda asa 44 for mantida em uma posição elevada, como a posição mostrada na Figura 5 (isto é, em um ângulo não paralelo positivo com relação ao plano de seção central 48), então o controlador 78 envia um sinal para a terceira válvula 84 abrir a terceira válvula 84. Enquanto a terceira válvula 84 está aberta, fluido é permitido que se mova a partir do segundo cilindro 72 através da terceira válvula 84 para dentro do segundo acumulador 74, conforme mostrado na Figura 12. Fluido é movido em resposta à gravidade puxando para baixo contra a segunda asa 44 para assim abaixar passivamente a segunda asa 44 quando a terceira válvula 84 é aberta. O controlador 78 continua a receber o segundo sinal indicativo da segunda posição da segunda asa 44. Se a segunda posição da segunda asa 44 estiver em uma posição nivelada ou abaixada (isto é, substancialmente paralela ao plano de seção central 48 ou em um ângulo não paralelo negativo com relação ao plano de seção central 48), então o controlador 78 envia um sinal para a terceira válvula 84 para fechar a terceira válvula 84. Enquanto a terceira válvula 84 é fechada, o fluido é inibido de se mover a partir do segundo cilindro 72 através da terceira válvula 84 para dentro do segundo acumulador 74, conforme mostrado na Figura 10.
Claims (20)
- Colheitadeira, caracterizada pelo fato de que compreende:
uma combinada incluindo uma máquina motriz operável para mover a combinada sobre uma superfície de solo em uma direção de deslocamento e um alimentador, o alimentador definindo uma linha central; e
uma plataforma de colheita conectada à combinada para o movimento com a combinada sobre a superfície de solo, a plataforma de colheita incluindo
uma seção central conectada à combinada, a seção central tendo um primeiro lado e um segundo lado oposto ao primeiro lado, a seção central se estendendo ao longo de um plano de seção central que é substancialmente perpendicular à linha central do alimentador,
uma primeira asa conectada ao primeiro lado da seção central, uma primeira asa sendo rotativa com relação à seção central dentro de uma primeira faixa de posições angulares,
um primeiro mecanismo de travamento configurado para manter uma primeira asa em uma primeira posição com relação à seção central, enquanto o primeiro mecanismo de travamento está ativado e configurado para permitir o movimento da primeira asa com relação à seção central, enquanto o primeiro mecanismo de travamento está desativado,
uma segunda asa conectada ao segundo lado da seção central, a segunda asa sendo rotativa com relação à seção central dentro de uma segunda faixa de posições angulares,
um segundo mecanismo de travamento configurado para manter a segunda asa em uma segunda posição com relação à seção central, enquanto o segundo mecanismo de travamento está ativado e configurado para permitir o movimento da segunda asa com relação à seção central, enquanto o segundo mecanismo de travamento está desativado,
um controlador configurado para receber um primeiro sinal indicativo da primeira posição e um segundo sinal indicativo da segunda posição, o controlador configurado para enviar um terceiro sinal para o primeiro mecanismo de travamento para desativar o primeiro mecanismo de travamento em resposta à primeira posição estando em um ângulo não paralelo positivo com relação ao plano de seção central, e configurado para enviar um quarto sinal para o segundo mecanismo de travamento para desativar o segundo mecanismo de travamento em resposta à segunda posição estando em um ângulo não paralelo positivo com relação ao plano de seção central,
em que uma primeira asa é configurada para se mover na direção do plano de seção central em resposta à gravidade, enquanto o primeiro mecanismo de travamento está desativado, e
em que a segunda asa é configurada para se mover na direção do plano de seção central em resposta à gravidade, enquanto o segundo mecanismo de travamento está desativado. - Colheitadeira de acordo com a reivindicação 1, caracterizada pelo fato de que o controlador é configurado para enviar um quinto sinal para o primeiro mecanismo de travamento para ativar o primeiro mecanismo de travamento e para enviar um sexto sinal para o segundo mecanismo de travamento para ativar o segundo mecanismo de travamento em resposta a um operador selecionando uma operação de transporte da colheitadeira.
- Colheitadeira de acordo com a reivindicação 2, caracterizada pelo fato de que o controlador é configurado para continuar a enviar o quinto sinal para o primeiro mecanismo de travamento para manter a ativação do primeiro mecanismo de travamento em resposta à primeira posição estando em um ângulo não paralelo negativo com relação ao plano de seção central, e é configurado para continuar a enviar o sexto sinal para o segundo mecanismo de travamento para manter a ativação do segundo mecanismo de travamento em resposta à segunda posição estando em um ângulo não paralelo negativo com relação ao plano de seção central.
- Colheitadeira de acordo com a reivindicação 2, caracterizada pelo fato de que o controlador é configurado para continuar a enviar o quinto sinal para o primeiro mecanismo de travamento para ativar o primeiro mecanismo de travamento em resposta à primeira posição estando substancialmente paralela ao plano de seção central, e é configurado para continuar a enviar o sexto sinal para o segundo mecanismo de travamento para ativar o segundo mecanismo de travamento em resposta à segunda posição estando substancialmente paralela ao plano de seção central.
- Colheitadeira de acordo com a reivindicação 1, caracterizada pelo fato de que o primeiro mecanismo de travamento inclui um primeiro cilindro, um primeiro acumulador e uma primeira válvula fluidamente posicionada entre o primeiro cilindro e o primeiro acumulador.
- Colheitadeira de acordo com a reivindicação 5, caracterizada pelo fato de que, enquanto o primeiro mecanismo de travamento está ativado, uma primeira válvula é fechada para inibir fluxo de fluido entre o primeiro cilindro e o primeiro acumulador e, enquanto o primeiro mecanismo de travamento está desativado, uma primeira válvula é aberta para permitir fluxo de fluido do primeiro cilindro para o primeiro acumulador.
- Colheitadeira de acordo com a reivindicação 6, caracterizada pelo fato de que o segundo mecanismo de travamento inclui um segundo cilindro, um segundo acumulador e uma segunda válvula fluidamente posicionada entre o segundo cilindro e o segundo acumulador.
- Colheitadeira de acordo com a reivindicação 7, caracterizada pelo fato de que, enquanto o segundo mecanismo de travamento está ativado, a segunda válvula é fechada para inibir fluxo de fluido entre o segundo cilindro e o segundo acumulador e, enquanto o segundo mecanismo de travamento está desativado, a segunda válvula é aberta para permitir fluxo de fluido do segundo cilindro para o segundo acumulador.
- Plataforma de colheita configurada para ser acoplada a uma combinada para o movimento com a combinada sobre uma superfície de solo em uma direção de deslocamento, a plataforma de colheita caracterizada pelo fato de que compreende:
uma seção central conectada à combinada, a seção central tendo um primeiro lado e um segundo lado oposto ao primeiro lado, a seção central se estendendo ao longo de um plano de seção central que é substancialmente paralela à superfície de solo;
uma primeira asa conectada ao primeiro lado da seção central, uma primeira asa sendo rotativa com relação à seção central dentro de uma primeira faixa de posições angulares;
um primeiro mecanismo de travamento configurado para manter uma primeira asa em uma primeira posição com relação à seção central, enquanto o primeiro mecanismo de travamento está ativado e configurado para permitir o movimento da primeira asa com relação à seção central, enquanto o primeiro mecanismo de travamento está desativado;
uma segunda asa conectada ao segundo lado da seção central, a segunda asa sendo rotativa com relação à seção central dentro de uma segunda faixa de posições angulares;
um segundo mecanismo de travamento configurado para manter a segunda asa em uma segunda posição com relação à seção central, enquanto o segundo mecanismo de travamento está ativado e configurado para permitir o movimento da segunda asa com relação à seção central, enquanto o segundo mecanismo de travamento está desativado; e
um controlador configurado para receber um primeiro sinal indicativo da primeira posição e um segundo sinal indicativo da segunda posição, o controlador configurado para enviar um terceiro sinal para o primeiro mecanismo de travamento para desativar o primeiro mecanismo de travamento em resposta à primeira posição estando em um ângulo não paralelo positivo com relação ao plano de seção central, e configurado para enviar um quarto sinal para o segundo mecanismo de travamento para desativar o segundo mecanismo de travamento em resposta à segunda posição estando em um ângulo não paralelo positivo com relação ao plano de seção central;
em que uma primeira asa é configurada para se mover na direção do plano de seção central em resposta à gravidade, enquanto o primeiro mecanismo de travamento está desativado, e
em que a segunda asa é configurada para se mover na direção do plano de seção central em resposta à gravidade, enquanto o segundo mecanismo de travamento está desativado. - Plataforma de colheita de acordo com a reivindicação 9, caracterizada pelo fato de que o controlador é configurado para enviar um quinto sinal para o primeiro mecanismo de travamento para ativar o primeiro mecanismo de travamento e para enviar um sexto sinal para o segundo mecanismo de travamento para ativar o segundo mecanismo de travamento em resposta a um operador selecionando uma operação de transporte da combinada.
- Plataforma de colheita de acordo com a reivindicação 10, caracterizada pelo fato de que o controlador é configurado para continuar a enviar o quinto sinal para o primeiro mecanismo de travamento para manter a ativação do primeiro mecanismo de travamento em resposta à primeira posição estando em um ângulo não paralelo negativo com relação ao plano de seção central, e é configurado para continuar a enviar o sexto sinal para o segundo mecanismo de travamento para manter a ativação do segundo mecanismo de travamento em resposta à segunda posição estando em um ângulo não paralelo negativo com relação ao plano de seção central.
- Plataforma de colheita de acordo com a reivindicação 10, caracterizada pelo fato de que o controlador é configurado para continuar a enviar o quinto sinal para o primeiro mecanismo de travamento para ativar o primeiro mecanismo de travamento em resposta à primeira posição estando substancialmente paralela ao plano de seção central, e é configurado para continuar a enviar o sexto sinal para o segundo mecanismo de travamento para ativar o segundo mecanismo de travamento em resposta à segunda posição estando substancialmente paralela ao plano de seção central.
- Plataforma de colheita de acordo com a reivindicação 9, caracterizada pelo fato de que o primeiro mecanismo de travamento inclui um primeiro cilindro, um primeiro acumulador e uma primeira válvula fluidamente posicionada entre o primeiro cilindro e o primeiro acumulador.
- Plataforma de colheita de acordo com a reivindicação 13, caracterizada pelo fato de que, enquanto o primeiro mecanismo de travamento está ativado, uma primeira válvula é fechada para inibir fluxo de fluido entre o primeiro cilindro e o primeiro acumulador e, enquanto o primeiro mecanismo de travamento está desativado, uma primeira válvula é aberta para permitir fluxo de fluido do primeiro cilindro para o primeiro acumulador.
- Plataforma de colheita de acordo com a reivindicação 14, caracterizada pelo fato de que o segundo mecanismo de travamento inclui um segundo cilindro, um segundo acumulador e uma segunda válvula fluidamente posicionada entre o segundo cilindro e o segundo acumulador.
- Plataforma de colheita de acordo com a reivindicação 15, caracterizada pelo fato de que, enquanto o segundo mecanismo de travamento está ativado, a segunda válvula é fechada para inibir fluxo de fluido entre o segundo cilindro e o segundo acumulador e, enquanto o segundo mecanismo de travamento está desativado, a segunda válvula é aberta para permitir fluxo de fluido a partir do segundo cilindro to o segundo acumulador.
- Plataforma de colheita configurada para ser acoplada a uma combinada para o movimento com a combinada sobre uma superfície de solo em uma direção de deslocamento, a plataforma de colheita caracterizada pelo fato de que compreende:
uma primeira seção conectada à combinada, uma primeira seção tendo um primeiro lado e um segundo lado oposto ao primeiro lado, uma primeira seção se estendendo ao longo de um primeiro plano de seção que é substancialmente paralelo à superfície de solo;
uma segunda seção conectada ao primeiro lado da primeira seção, a segunda seção sendo rotativa com relação à primeira seção dentro de uma faixa de posições angulares;
um mecanismo de travamento configurado para manter a segunda seção em uma posição com relação à primeira seção, enquanto o mecanismo de travamento está ativado, e configurado para permitir o movimento da segunda seção com relação à primeira seção, enquanto o mecanismo de travamento está desativado; e
um controlador configurado para receber um primeiro sinal indicativo da posição, e configurado para enviar um segundo sinal para o mecanismo de travamento para desativar o mecanismo de travamento em resposta à posição estando em um ângulo não paralelo positivo com relação a um primeiro plano de seção,
em que a segunda seção é configurada para se mover na direção de um primeiro plano de seção em resposta à gravidade, enquanto o mecanismo de travamento está desativado. - Plataforma de colheita de acordo com a reivindicação 17, caracterizada pelo fato de que a faixa de posições angulares é uma primeira faixa de posições angulares, o mecanismo de travamento é um primeiro mecanismo de travamento, e a posição é uma primeira posição compreendendo adicionalmente
uma terceira seção conectada ao segundo lado da primeira seção, a terceira seção sendo rotativa com relação à primeira seção dentro de uma segunda faixa de posições, e
um segundo mecanismo de travamento configurado para manter a terceira seção em uma segunda posição com relação à primeira seção, enquanto o segundo mecanismo de travamento está ativado e configurado para permitir o movimento de a terceira seção com relação à primeira seção, enquanto o segundo mecanismo de travamento está desativado,
em que o controlador é configurado adicionalmente para receber um terceiro sinal indicativo da segunda posição e configurado para enviar um quarto sinal para o segundo mecanismo de travamento para desativar o segundo mecanismo de travamento em resposta à segunda posição estando em um ângulo não paralelo positivo com relação a um primeiro plano de seção, e
em que a terceira seção é configurada para se mover na direção de um primeiro plano de seção em resposta à gravidade, enquanto o segundo mecanismo de travamento está desativado. - Plataforma de colheita de acordo com a reivindicação 18, caracterizada pelo fato de que o controlador é configurado para enviar um quinto sinal para o primeiro mecanismo de travamento para ativar o primeiro mecanismo de travamento e para enviar um sexto sinal para o segundo mecanismo de travamento para ativar o segundo mecanismo de travamento em resposta a um operador selecionando uma operação de transporte da combinada,
em que o controlador é configurado para continuar a enviar o quinto sinal para o primeiro mecanismo de travamento para manter a ativação do primeiro mecanismo de travamento em resposta à primeira posição estando em um ângulo não paralelo negativo com relação a um primeiro plano de seção, e é configurado para continuar a enviar o sexto sinal para o segundo mecanismo de travamento para manter a ativação do segundo mecanismo de travamento em resposta à segunda posição estando em um ângulo não paralelo negativo com relação a um primeiro plano de seção, e
em que o controlador é configurado para continuar a enviar o quinto sinal para o primeiro mecanismo de travamento para ativar o primeiro mecanismo de travamento em resposta à primeira posição sendo substancialmente paralela a um primeiro plano de seção, e é configurado para continuar a enviar o sexto sinal para o segundo mecanismo de travamento para ativar o segundo mecanismo de travamento em resposta à segunda posição sendo substancialmente paralela a um primeiro plano de seção. - Plataforma de colheita de acordo com a reivindicação 17, caracterizada pelo fato de que o mecanismo de travamento inclui um cilindro, um acumulador e uma válvula fluidamente posicionada entre o cilindro e o acumulador, e
em que, enquanto o mecanismo de travamento está ativado, a válvula é fechada para inibir fluxo de fluido entre o cilindro e o acumulador, e, enquanto o mecanismo de travamento está desativado, a válvula é aberta para permitir fluxo de fluido do cilindro para o acumulador.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/423642 | 2019-05-28 | ||
| US16/423,642 US11019770B2 (en) | 2019-05-28 | 2019-05-28 | Harvester wing leveling configuration |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| BR102020007454A2 true BR102020007454A2 (pt) | 2020-12-08 |
| BR102020007454B1 BR102020007454B1 (pt) | 2026-01-27 |
Family
ID=
Also Published As
| Publication number | Publication date |
|---|---|
| CN112005706B (zh) | 2024-04-02 |
| US11019770B2 (en) | 2021-06-01 |
| DE102020114271A1 (de) | 2020-12-03 |
| US20200375105A1 (en) | 2020-12-03 |
| CN112005706A (zh) | 2020-12-01 |
| CA3081123A1 (en) | 2020-11-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| BR102020006013A2 (pt) | Conjuntos de cabeçote e de força de flutuação para um cabeçote de máquina de colheita, e, cabeçote para uma máquina de colheita. | |
| BR102020005706A2 (pt) | Conjuntos de cabeçote e de força de flutuação para uma máquina de colheita, e, cabeçote para uma máquina de colheita | |
| BR102018071042B1 (pt) | Espigadeira de lona | |
| BR102020005699A2 (pt) | Conjunto de cabeçote e de força de flutuação para uma máquina de colheita, e, cabeçote para uma unidade de tração de uma máquina de colheita | |
| US11019770B2 (en) | Harvester wing leveling configuration | |
| BR102014018542B1 (pt) | método e sistema de controle de inclinação lateral de plataforma junto a uma máquina de colheita agrícola | |
| BR102017007967A2 (pt) | Handle cutting platform steering adjustment | |
| BR102020006503A2 (pt) | plataforma de colheita agrícola para uma colheitadeira agrícola, e, método para operar uma plataforma de colheita agrícola | |
| BR102021013040A2 (pt) | Métodos para posicionar uma lâmina e para movimentar materiais com uma lâmina, e, veículo de trabalho | |
| BR112021011601A2 (pt) | Plataforma de corte equipada com um sistema de transporte automatizado de plataforma e barra de tração | |
| BR112016000346B1 (pt) | Plataforma para uma ceifeira-debulhadora" | |
| BR102020019707A2 (pt) | cabeçote de colheita, e, método para controlar um sistema de suspensão de um cabeçote de colheita. | |
| BR102015024295A2 (pt) | sistema hidráulico e válvula para um sistema hidráulico | |
| CN115152421A (zh) | 丘陵山区小型玉米收获机的自动姿态调整系统及方法 | |
| BR102020007454B1 (pt) | Colheitadeira, e, plataformas de colheita | |
| US11277967B2 (en) | Harvester transport preparation | |
| BR102015024303A2 (pt) | sistema hidráulico e válvula para um sistema hidráulico | |
| ES2257130A1 (es) | Sistema nivelador-compensador para maquinas cosechadoras y similares. | |
| BR202021019666U2 (pt) | Mecanismo pantográfico aplicado em equipamento rolo faca | |
| BR102022022132A2 (pt) | Instrumento agrícola, e, método para operar um instrumento agrícola | |
| BR102018071164A2 (pt) | Espigadeira de lona para uma combinada, e, método para nivelar a primeira e segunda aletas de um conjunto de colheitadeira de uma espigadeira de lona em uma combinada. | |
| BR102022018158A2 (pt) | Aperfeiçoamento em semeadora auto transportável com seções articuladas | |
| AU718169B3 (en) | Self-levelling mobile supporting chassis | |
| BR112020013657B1 (pt) | Plataforma de lona para colheitadeira | |
| BR202019025525U2 (pt) | Plataforma de corte- caap elétrico |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| B03A | Publication of a patent application or of a certificate of addition of invention [chapter 3.1 patent gazette] | ||
| B06W | Patent application suspended after preliminary examination (for patents with searches from other patent authorities) chapter 6.23 patent gazette] | ||
| B09A | Decision: intention to grant [chapter 9.1 patent gazette] | ||
| B16A | Patent or certificate of addition of invention granted [chapter 16.1 patent gazette] |
Free format text: PRAZO DE VALIDADE: 20 (VINTE) ANOS CONTADOS A PARTIR DE 15/04/2020, OBSERVADAS AS CONDICOES LEGAIS |