BR102020008648A2 - máquina de trabalho agrícola autônoma e método para sua operação - Google Patents
máquina de trabalho agrícola autônoma e método para sua operação Download PDFInfo
- Publication number
- BR102020008648A2 BR102020008648A2 BR102020008648-0A BR102020008648A BR102020008648A2 BR 102020008648 A2 BR102020008648 A2 BR 102020008648A2 BR 102020008648 A BR102020008648 A BR 102020008648A BR 102020008648 A2 BR102020008648 A2 BR 102020008648A2
- Authority
- BR
- Brazil
- Prior art keywords
- working machine
- current position
- fact
- predefined
- agricultural working
- Prior art date
Links
Images





Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01B—SOIL WORKING IN AGRICULTURE OR FORESTRY; PARTS, DETAILS, OR ACCESSORIES OF AGRICULTURAL MACHINES OR IMPLEMENTS, IN GENERAL
- A01B69/00—Steering of agricultural machines or implements; Guiding agricultural machines or implements on a desired track
- A01B69/007—Steering or guiding of agricultural vehicles, e.g. steering of the tractor to keep the plough in the furrow
- A01B69/008—Steering or guiding of agricultural vehicles, e.g. steering of the tractor to keep the plough in the furrow automatic
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3407—Route searching; Route guidance specially adapted for specific applications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0257—Control of position or course in two dimensions specially adapted to land vehicles using a radar
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0276—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/24—Arrangements for determining position or orientation
- G05D1/243—Means capturing signals occurring naturally from the environment, e.g. ambient optical, acoustic, gravitational or magnetic signals
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/24—Arrangements for determining position or orientation
- G05D1/244—Arrangements for determining position or orientation using passive navigation aids external to the vehicle, e.g. markers, reflectors or magnetic means
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/24—Arrangements for determining position or orientation
- G05D1/247—Arrangements for determining position or orientation using signals provided by artificial sources external to the vehicle, e.g. navigation beacons
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/24—Arrangements for determining position or orientation
- G05D1/247—Arrangements for determining position or orientation using signals provided by artificial sources external to the vehicle, e.g. navigation beacons
- G05D1/248—Arrangements for determining position or orientation using signals provided by artificial sources external to the vehicle, e.g. navigation beacons generated by satellites, e.g. GPS
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/24—Arrangements for determining position or orientation
- G05D1/247—Arrangements for determining position or orientation using signals provided by artificial sources external to the vehicle, e.g. navigation beacons
- G05D1/249—Arrangements for determining position or orientation using signals provided by artificial sources external to the vehicle, e.g. navigation beacons from positioning sensors located off-board the vehicle, e.g. from cameras
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/646—Following a predefined trajectory, e.g. a line marked on the floor or a flight path
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01B—SOIL WORKING IN AGRICULTURE OR FORESTRY; PARTS, DETAILS, OR ACCESSORIES OF AGRICULTURAL MACHINES OR IMPLEMENTS, IN GENERAL
- A01B79/00—Methods for working soil
- A01B79/005—Precision agriculture
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0276—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle
- G05D1/0278—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle using satellite positioning signals, e.g. GPS
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2105/00—Specific applications of the controlled vehicles
- G05D2105/15—Specific applications of the controlled vehicles for harvesting, sowing or mowing in agriculture or forestry
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2107/00—Specific environments of the controlled vehicles
- G05D2107/20—Land use
- G05D2107/21—Farming, e.g. fields, pastures or barns
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2109/00—Types of controlled vehicles
- G05D2109/10—Land vehicles
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2111/00—Details of signals used for control of position, course, altitude or attitude of land, water, air or space vehicles
- G05D2111/10—Optical signals
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2111/00—Details of signals used for control of position, course, altitude or attitude of land, water, air or space vehicles
- G05D2111/30—Radio signals
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2111/00—Details of signals used for control of position, course, altitude or attitude of land, water, air or space vehicles
- G05D2111/50—Internal signals, i.e. from sensors located in the vehicle, e.g. from compasses or angular sensors
- G05D2111/54—Internal signals, i.e. from sensors located in the vehicle, e.g. from compasses or angular sensors for measuring the travel distances, e.g. by counting the revolutions of wheels
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2111/00—Details of signals used for control of position, course, altitude or attitude of land, water, air or space vehicles
- G05D2111/60—Combination of two or more signals
- G05D2111/67—Sensor fusion
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- General Physics & Mathematics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Mechanical Engineering (AREA)
- Soil Sciences (AREA)
- Environmental Sciences (AREA)
- Electromagnetism (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Guiding Agricultural Machines (AREA)
Abstract
máquina de trabalho agrícola autônoma e método para sua operação a invenção se refere, inter alia, a um método para operação de uma máquina de trabalho agrícola autônoma (10). uma primeira posição atual da máquina de trabalho agrícola (10) é determinada por meio de um primeiro dispositivo de determinação de posição (18). uma segunda posição atual da máquina de trabalho agrícola (10) é determinada por meio de um segundo dispositivo de determinação de posição (20). um valor de desvio relacionado a uma diferença entre a primeira posição atual e a segunda posição atual é determinado. a máquina de trabalho (10) é operada de forma autônoma em função do valor de desvio determinado.
Description
[001] A invenção se refere a uma máquina de trabalho agrícola autônoma e a um método para operação de uma máquina de trabalho agrícola autônoma.
[002] Veículos semiautônomos e totalmente autônomos estão se tornando cada vez mais populares na engenharia agrícola. Um veículo desse tipo foi registrado, por exemplo, no pedido de patente alemão n° 10 2018 108 024.
[003] Tais veículos autônomos devem atender aos requisitos da Diretriz de Máquinas 2006/42/EC, particularmente aos requisitos das normas ISO 12100 e ISO 13849 e ISO 25119. De acordo com essas normas, um assim chamado estágio de desempenho (PL) deve ser definido para as funções de comando e os controles devem ser projetados de maneira correspondente. Isso significa que, em função do estágio de desempenho definido, a respectiva arquitetura do hardware de controle e do software de controle deve ser configurada de maneira correspondente.
[004] A partir disso, um reconhecimento de pessoas confiável provou ser uma grande dificuldade. A tecnologia de sensores, como é conhecida, por exemplo, no setor automotivo, pode ser usada apenas limitadamente. Uma razão para isso são os diferentes estágios de crescimento das plantas. As plantas de milho, por exemplo, podem crescer até 3 metros ou mais. Além disso, as máquinas de trabalho agrícolas (por exemplo, pulverizadores de campo, distribuidores de fertilizantes, semeadoras) podem ter grandes larguras de trabalho de 24 metros, 30 metros ou mais. O sistema de sensores com o qual mesmo uma pessoa deitada em uma plantação de 3 metros de altura ou densa pode ser reconhecida de maneira "segura" em uma largura de trabalho de até 36 metros, de acordo com a diretriz de máquinas, não é tecnicamente possível até o momento, ou, se for, é possível apenas de maneira extremamente complexa e dispendiosa.
[005] Outro aspecto de difícil implementação em termos de segurança diz respeito à implementação de um "limite virtual" dentro do qual a máquina de trabalho agrícola pode se mover. Isso significa que é necessário assegurar que a máquina de trabalho não saia da respectiva área agrícola de maneira descontrolada. Aqui há uma diferença em relação aos veículos conhecidos, por exemplo, do setor automotivo. Veículos de passageiros e caminhões são guiados ao longo de estradas cujos limites são definidos, por exemplo, por meio de delineadores, os quais podem ser reconhecidos ou detectados facilmente por meio do sistema de sensores. Esse não é o caso, ou é o caso apenas de maneira limitada, de grandes áreas agrícolas que também podem ter uma grande variedade de limites (por exemplo, adjacentes a uma estrada ou adjacentes a um caminho rural ou adjacentes a outras culturas ou afins) e contornos dos limites (por exemplo, sinuosos, retilíneos ou afins). Um dispositivo de determinação de posição confiável pode formar a base para uma navegação segura.
[006] O documento US 5 974 348 A divulga um sistema e um método de trabalho automatizado. Um ou mais robôs de navegação automática podem executar processos de trabalho automatizados com uma precisão de seis graus de liberdade em um terreno ondulado, inclinado ou irregular. Um robô autopropelido se move pelo jardim e realiza trabalhos de jardinagem de acordo com um percurso predefinido por meio de emparelhamento e determinação periódica de sua posição e orientação. Pelo menos sete balizas de navegação são dispostas em torno de uma área de trabalho de jardinagem. Cada baliza irradia radiação eletromagnética sobre o jardim, para que o robô com acionamento próprio a reconheça. Um módulo de navegação determina a posição e a orientação do robô no jardim com base na saída de uma câmera de imagens.
[007] O documento EP 1 266 552 B1 divulga um sistema para determinação da posição de um veículo de trabalho agrícola. Um primeiro sensor de posição gera um primeiro sinal de posição, que contém informações sobre a presente posição do veículo de trabalho e é gerado por meio de um sinal de satélite. Um segundo sensor de posição produz um segundo sinal de posição, que contém informações sobre a presente posição do veículo de trabalho e é gerado por meio de um segundo sensor de posição local instalado no veículo de trabalho. Um equipamento de avaliação é acionado com o primeiro sinal de posição e o segundo sinal de posição, e é configurado para calcular a respectiva posição do veículo de trabalho. O equipamento de avaliação recebe informações de qualidade sobre a qualidade dos dois sinais de posição, e, ao calcular a posição, o equipamento de avaliação leva em consideração o primeiro sinal de posição e o segundo sinal de posição, ponderados de acordo com as informações de qualidade.
[008] Os dispositivos de determinação de posição conhecidos a partir do estado da técnica podem, por vezes, ter desvios da posição real de alguns centímetros a até um metro ou mais. Isso pode ter como consequência que a máquina de trabalho seja guiada, por exemplo, deslocada da faixa do respectivo desvio ao longo de uma faixa predefinida. Além disso, pode acontecer de a conexão entre uma unidade de controle e um dispositivo de determinação de posição ser interrompida, o que, por sua vez, pode resultar em estados de segurança críticos.
[009] Isso pode ser particularmente crítico se a máquina de trabalho precisar ser movida exatamente ao lado de uma estrada.
[010] O objetivo da invenção é, portanto, criar uma tecnologia alternativa e/ou aprimorada para operação de uma máquina de trabalho agrícola autônoma.
[011] O objetivo é alcançado por meio das características das reivindicações independentes. Configurações vantajosas são especificadas nas reivindicações independentes e no relatório descritivo.
[012] A invenção provê um método para operação de uma máquina de trabalho agrícola (por exemplo, parcial ou totalmente) autônoma. O método possui uma determinação (por exemplo, detecção) de uma primeira posição atual da máquina de trabalho agrícola por meio de um primeiro dispositivo de determinação de posição. O método possui uma determinação (por exemplo, detecção) de uma segunda posição atual da máquina de trabalho agrícola por meio de um dispositivo de determinação de posição. O método possui uma determinação de um valor de desvio relacionado a uma diferença (por exemplo, distância, intervalo etc.) entre a primeira posição atual e a segunda posição atual. O método possui uma operação autônoma da máquina de trabalho agrícola autônoma em função do valor de desvio determinado.
[013] Ao se comparar duas posições atuais determinadas independentemente uma da outra, a ocorrência de situações críticas de segurança, causadas por determinações de posição incorretas, pode ser reduzida. Quando ambas as posições determinadas independentemente uma da outra são semelhantes entre si, pode-se assumir, com grande probabilidade, que a máquina de trabalho se encontra realmente na área da primeira e da segunda posições atuais. Além disso, o tratamento (da planta ou do solo) feito pela máquina de trabalho pode ser aprimorado, uma vez que o tratamento desejado pode ser realizado com maior segurança em uma posição mais precisa.
[014] Em uma modalidade exemplar, a determinação da primeira posição atual e a determinação da segunda posição atual são realizadas simultaneamente ou dentro de um período predefinido. Isso aumenta a comparabilidade das posições. A janela temporal (por exemplo, menor que 1 s, 0,1 s ou 0,01 s) pode ser dimensionada tão pequena de modo que não haja diferenças de posição relevantes devidas ao desvio de tempo das medições. O uso da janela temporal pode aumentar a praticidade, uma vez que há uma grande complexidade envolvida em se implementar exatamente os mesmos momentos para se determinar a primeira e a segunda posições atuais. A comparação dos momentos relacionados à determinação das posições atuais pode ser possível, por exemplo, por meio de registros de tempo gerados automaticamente, que são atribuídos às posições atuais.
[015] Em uma modalidade exemplar adicional, a determinação da primeira posição atual e a determinação da segunda posição atual são realizadas em momentos diferentes. A primeira posição atual ou a segunda posição atual são convertidas em uma base de tempo comum, preferencialmente levando-se em consideração uma velocidade de condução e/ou uma direção de condução da máquina de trabalho agrícola autônoma. Uma influência da mudança de posição da máquina de trabalho devido à diferença de tempo na determinação da primeira e da segunda posição atual pode, assim, ser compensada ou, pelo menos, reduzida. Pode-se realizar, por exemplo, uma interpolação em relação à primeira ou segunda posição atual, levando-se em consideração a velocidade de condução e/ou a direção de condução da máquina de trabalho agrícola autônoma.
[016] Em uma modalidade exemplar adicional, o primeiro dispositivo de determinação de posição é projetado separadamente e/ou independentemente do segundo dispositivo de determinação de posição. Por exemplo, os dispositivos de determinação de posição podem usar diferentes princípios físicos de medição. Isso pode garantir que ambos os dispositivos de determinação de posição não estejam sujeitos ao mesmo erro, o qual, desse modo, não seria perceptível na comparação.
[017] Em uma modalidade exemplar adicional, o primeiro dispositivo de determinação de posição e/ou o segundo dispositivo de determinação de posição é/são incluído(s) na máquina de trabalho agrícola autônoma.
[018] Em uma modalidade, a operação da máquina de trabalho agrícola autônoma compreende parar, imobilizar, transferir para um estado seguro, interromper um tratamento, reduzir uma velocidade de condução atual e/ou reduzir uma velocidade máxima admissível da máquina de trabalho agrícola autônoma, se o valor de desvio determinado exceder um valor limite predefinido, preferencialmente variável e/ou de vários estágios. Dessa forma é possível reagir a desvios entre as posições atuais que sejam muito grandes, para que situações perigosas causadas por determinações de posição incorretas possam ser evitadas.
[019] Em uma modalidade adicional, a operação da máquina de trabalho agrícola autônoma compreende continuar com uma condução, continuar com um tratamento, operar de acordo com um planejamento prévio (por exemplo, planejado antes da operação da máquina de trabalho, por exemplo, por meio de uma ferramenta de planejamento de faixas), aumentar ou manter uma velocidade de condução atual e/ou aumentar ou manter uma velocidade máxima admissível de condução da máquina de trabalho agrícola autônoma, se o valor de desvio determinado não exceder um valor limite predefinido, preferencialmente variável e/ou de vários estágios. Assim, a máquina de trabalho pode ser operada de forma autônoma, conforme desejado e planejado, com apenas pequenos desvios (toleráveis) entre a primeira e a segunda posição atual.
[020] Em uma modalidade adicional, o valor limite depende de uma velocidade de condução atual da máquina de trabalho agrícola autônoma. Preferencialmente, o valor limite diminui com o aumento da velocidade de condução atual e/ou aumenta com a diminuição da velocidade de condução atual. Assim, em velocidades de condução mais altas nas quais situações perigosas podem ocorrer mais rapidamente, pode haver um limite de tolerância mais baixo em relação aos desvios tolerados entre as posições determinadas. Isso pode reduzir significativamente o risco de situações perigosas.
[021] Em uma modalidade adicional, o valor limite é dependente da posição, preferencialmente dependente da primeira posição atual e/ou da segunda posição atual. Preferencialmente, o valor limite diminui se a primeira posição atual e/ou a segunda posição atual estiver dentro de uma zona de perigo espacial predefinida (por exemplo, uma estrada, caminho, declive, corpo de água, limite de campo, limite de propriedade, edifício, turbina eólica, instalação solar, poste de eletricidade, outro veículo, pessoa, animal etc.), preferencialmente estacionária ou móvel, ou se a máquina de trabalho agrícola autônoma se aproximar da zona de perigo espacial predefinida. Adicional ou alternativamente, o valor limite pode aumentar se a primeira posição atual e/ou a segunda posição atual estiver fora de uma zona de perigo espacial predefinida (por exemplo, uma estrada, caminho, declive, corpo de água, limite de campo, limite de propriedade, edifício, turbina eólica, instalação solar, poste de eletricidade, outro veículo, pessoa, animal etc.), preferencialmente estacionária ou móvel, ou se a máquina de trabalho agrícola autônoma se afastar da zona de perigo espacial predefinida. O risco de situações perigosas nas zonas de perigo espacial predefinidas pode, assim, ser reduzido devido a desvios entre a primeira posição atual e a segunda posição atual.
[022] Em uma variante da modalidade, o primeiro dispositivo de determinação de posição é um dispositivo de determinação de posição por satélite (ou parte de um sistema de determinação de posição por satélite global) e o segundo dispositivo de determinação de posição é um dispositivo de determinação de posição local (ou parte de um sistema de determinação de posição local). Alternativamente, o primeiro dispositivo de determinação de posição e o segundo dispositivo de determinação de posição podem ser, cada um, um dispositivo de determinação de posição local. Alternativamente, o primeiro dispositivo de determinação de posição e o segundo dispositivo de determinação de posição podem ser, cada um, um dispositivo de determinação de posição por satélite.
[023] Em uma configuração adicional, o dispositivo de determinação de posição local possui um sistema de sensores de detecção periférica da máquina de trabalho agrícola autônoma. Preferencialmente, o sistema de sensores de detecção periférica possui um dispositivo de radar, um dispositivo de escaneamento a laser, um dispositivo LIDAR, um dispositivo de câmera e/ou um veículo aéreo não tripulado.
[024] Em uma variante da modalidade, o dispositivo de determinação de posição local é projetado para detectar ou determinar uma distância e/ou uma posição angular entre (por exemplo, uma posição predefinida do eixo (por exemplo, eixo longitudinal ou transversal da)) a máquina de trabalho agrícola autônoma e pelo menos um (por exemplo, 1, 2 ou mais) ponto de referência predefinido disposto em uma posição predefinida, preferencialmente para determinar uma posição atual da máquina de trabalho agrícola autônoma.
[025] Em uma variante adicional da modalidade, o pelo menos um ponto de referência é no mínimo parcialmente artificial, compreendendo preferencialmente um poste, um edifício, uma turbina eólica, um poste de eletricidade, outro veículo, uma estrada, uma instalação solar e/ou um limite de campo. Adicional ou alternativamente, o pelo menos um ponto de referência pode ser pelo menos parcialmente natural, compreendendo preferencialmente uma formação rochosa, uma formação vegetal, um relevo e/ou um corpo de água.
[026] Em uma modalidade exemplar, o pelo menos um elemento de ponto de referência é estacionário ou móvel.
[027] Por exemplo, pelo menos dois pontos de referência, por exemplo, postes, podem ser dispostos em um veículo móvel, por exemplo, em um reboque.
[028] Em uma modalidade exemplar adicional, o pelo menos um ponto de referência é provido com uma marcação, preferencialmente para um algoritmo de processamento de imagem de um dispositivo de câmera, e/ou de um refletor ou de uma fonte de sinal, preferencialmente para detecção para um sistema de sensores de detecção periférica. O reconhecimento e/ou a identificabilidade dos pontos de referência podem, assim, ser melhorados por meio do sistema de sensores de detecção periférica.
[029] Em uma modalidade exemplar, o sistema de sensores de detecção periférica possui um dispositivo de radar, por meio do qual é detectada uma distância e/ou uma posição angular entre a máquina de trabalho agrícola autônoma e pelo menos um ponto de referência, preferencialmente um poste, e então a primeira ou a segunda posição atual é determinada. Preferencialmente, o dispositivo de radar pode possuir um sensor de radar omnidirecional. Adicional ou alternativamente, o dispositivo de radar pode possuir, por exemplo, um sensor de radar em cada um dos dois lados longitudinais externos da máquina de trabalho agrícola autônoma. Preferencialmente, um dispositivo de radar pode ser usado, uma vez que é resistente a intempéries e, correspondentemente, possui um longo alcance, de modo que, mesmo em grandes áreas aráveis, alguns pontos de referência podem ser suficientes.
[030] Em uma modalidade exemplar, o dispositivo de determinação de posição local possui um dispositivo de odometria (por exemplo, possuindo sensor(es) de rotação das rodas para detectar uma distância percorrida pela máquina de trabalho e/ou um dispositivo de medição inercial (por exemplo, possuindo giroscópio(s) e/ou sensor(es) de aceleração e/ou sensor(es) de velocidade) para detectar uma velocidade, uma aceleração, uma rodagem, uma inclinação e/ou uma guinada da máquina de trabalho. Este dispositivo de determinação de posição local pode ser usado, por exemplo, para detectar a primeira posição atual ou a segunda posição atual, por exemplo, com base em outra posição determinada anteriormente por meio de outro dispositivo de determinação de posição.
[031] Também é possível usar o dispositivo de odometria e/ou o dispositivo de medição inercial para se determinar uma direção de condução (de longo prazo ou contínua). Se a máquina de trabalho ficar, por exemplo, brevemente sem um sinal de posição de outro dispositivo de determinação de posição local (se presente) e/ou um dispositivo determinação de posição por satélite (se presente), a máquina de trabalho poderá, se desejado, continuar a ser operada na direção de condução anterior.
[032] Em uma modalidade, a máquina de trabalho agrícola autônoma é projetada para conduzir de forma autônoma em uma área de trabalho espacial predefinida ao longo de um percurso de movimento predefinido, compreendendo preferencialmente uma pluralidade de pistas ou faixas paralelas, preferencialmente com uma velocidade máxima admissível de condução e/ou preferencialmente executando um tratamento de solo e/ou de vegetais associado à máquina de trabalho agrícola autônoma em posições predefinidas ao longo do percurso de movimento. A área de trabalho e o percurso de movimento podem, por exemplo, ser criados de maneira informatizada por meio de uma ferramenta de planejamento de faixas antes da operação da máquina de trabalho e podem ser armazenados em uma unidade de controle da máquina de trabalho.
[033] A invenção se refere a uma máquina de trabalho agrícola autônoma, que possui um primeiro dispositivo de determinação de posição e um segundo dispositivo de determinação de posição. A máquina de trabalho possui, além disso, uma unidade de controle que é configurada para executar um método conforme divulgado na presente invenção. A máquina de trabalho permite alcançar as mesmas vantagens que as descritas anteriormente para o método.
[034] Preferencialmente, o termo "unidade de controle" pode se referir a um sistema eletrônico (por exemplo, com microprocessador(es) e armazenamento de dados) que, de acordo com uma instrução, pode assumir tarefas de controle e/ou tarefas de regulação. Embora o termo "controle" seja usado na presente invenção, "regulação" ou "controle com realimentação" também podem ser usados conforme apropriado.
[035] De acordo com um aspecto adicional, a unidade de controle pode determinar uma orientação de longo prazo da máquina de trabalho na área arável com base em uma detecção de posição contínua da máquina de trabalho por meio dos dois dispositivos de determinação de posição, em que se pode prover, preferencialmente, que a unidade de controle realize uma comparação entre a orientação de longo prazo determinada da máquina de trabalho e o percurso de movimento predefinido por meio de uma ferramenta de planejamento de faixas, para determinar se os percursos de condução são mantidos de maneira correspondentemente exata ou não.
[036] As modalidades e características preferenciais da invenção anteriormente descritas podem ser combinadas entre si conforme desejado. Outras particularidades e vantagens da invenção são descritas a seguir mediante referência às Figuras anexas, em que:
A Figura 1 mostra uma vista lateral esquemática de uma máquina de trabalho agrícola autônoma;
A Figura 2 mostra uma vista superior esquemática de uma área de produção agrícola, na qual uma máquina de trabalho agrícola autônoma é operada;
A Figura 3 mostra uma vista superior esquemática de outra área de produção agrícola, na qual uma máquina de trabalho agrícola autônoma é operada;
A Figura 4 mostra uma representação esquemática de uma operação de uma máquina de trabalho agrícola autônoma;
A Figura 5 mostra uma vista superior esquemática de uma operação da máquina de trabalho agrícola autônoma acordo com a Figura 4;
A Figura 6 mostra uma representação esquemática de uma operação de uma máquina de trabalho agrícola autônoma;
A Figura 7 mostra uma vista superior esquemática de uma operação de uma máquina de trabalho agrícola autônoma acordo com a Figura 6; e
A Figura 8 mostra um diagrama exemplar do método para operação de uma máquina de trabalho agrícola de acordo com a presente invenção.
A Figura 1 mostra uma vista lateral esquemática de uma máquina de trabalho agrícola autônoma;
A Figura 2 mostra uma vista superior esquemática de uma área de produção agrícola, na qual uma máquina de trabalho agrícola autônoma é operada;
A Figura 3 mostra uma vista superior esquemática de outra área de produção agrícola, na qual uma máquina de trabalho agrícola autônoma é operada;
A Figura 4 mostra uma representação esquemática de uma operação de uma máquina de trabalho agrícola autônoma;
A Figura 5 mostra uma vista superior esquemática de uma operação da máquina de trabalho agrícola autônoma acordo com a Figura 4;
A Figura 6 mostra uma representação esquemática de uma operação de uma máquina de trabalho agrícola autônoma;
A Figura 7 mostra uma vista superior esquemática de uma operação de uma máquina de trabalho agrícola autônoma acordo com a Figura 6; e
A Figura 8 mostra um diagrama exemplar do método para operação de uma máquina de trabalho agrícola de acordo com a presente invenção.
[037] As modalidades mostradas nas Figuras coincidem parcialmente, de modo que partes semelhantes ou idênticas são providas com os mesmos sinais de referência e de cujo esclarecimento se abre mão na descrição de outras modalidades ou figuras, a fim de se evitar repetições.
[038] A Figura 1 mostra uma máquina de trabalho agrícola autônoma 10 na forma de um pulverizador de campo autônomo autopropelido. O pulverizador de campo pode distribuir meios líquidos, por exemplo, fertilizantes, pesticidas ou similares, através de um aparelho de tratamento (aparelho de trabalho) 12 na forma de uma barra de distribuição (barra de pulverização) sobre uma área de produção agrícola.
[039] É possível que a máquina de trabalho 10 não seja configurada para ser autopropelida, mas pode ser movida, preferencialmente tracionada, por exemplo, por um veículo motorizado, como um trator. Também é possível que a máquina de trabalho 10 tenha um aparelho de tratamento 12 alternativo ou adicional para tratamento do solo e/ou de plantas.
[040] Por exemplo, a máquina de trabalho 10 pode, alternativamente, ser configurada como um distribuidor de fertilizante ou uma semeadora. De acordo com uma variante alternativa da modalidade, a máquina de trabalho 10 também pode ser uma máquina para tratamento do solo e/ou para semeadura e, por exemplo, compreender um aparelho de tratamento 12 para tratamento do solo e/ou para disseminação de sementes agrícolas, fertilizantes ou similares. A máquina de trabalho 10 também pode ser um veículo portador autônomo, no qual, por sua vez, podem ser instaladas ferramentas para tratamento do solo, relhas ou barras de pulverização ou similares. A máquina de trabalho 10 também pode ser ou ter um veículo de tração (por exemplo, trator) adequado para a agricultura. Uma máquina para tratamento do solo e/ou para semeadura ou para a distribuição de pesticidas pode, por sua vez, ser acoplada ou puxada por um veículo de tração sobre uma área arável. A máquina de trabalho 10 também pode, no entanto, ser uma colheitadeira, como, por exemplo, uma ensiladora ou uma ceifeira-debulhadora ou semelhantes. Em geral, a máquina de trabalho 10 pode, por conseguinte, ser qualquer máquina de trabalho que seja adequada para emprego na agricultura.
[041] A máquina de trabalho 10 também pode ser controlada manualmente, por exemplo, por meio de um controle remoto e/ou por meio de um painel de controle provido na máquina de trabalho 10. As instruções inseridas manualmente podem ser processadas sobretudo por instruções geradas de maneira autônoma. Um exemplo para uma instrução manual desse tipo pode ser uma parada de emergência, por exemplo.
[042] A máquina de trabalho 10 possui uma unidade de controle 14. A unidade de controle 14 pode conduzir a máquina de trabalho 10 de forma autônoma em uma área de trabalho espacial predefinida ao longo de um percurso de movimento predefinido, compreendendo preferencialmente uma pluralidade de pistas ou faixas paralelas.
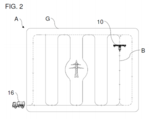
[043] Para esclarecimento, as Figuras 2 e 3 mostram percursos de movimento B exemplares em uma área de trabalho espacial A predefinida. A área de trabalho A é uma área de produção agrícola ou área arável, como, por exemplo, uma área para cultivo de cereais. A área de trabalho A é delimitada por um limite (de campo) G em direção ao exterior.
[044] O percurso do movimento B é predefinido, por exemplo, por meio de uma ferramenta de planejamento de faixas antes do início do trabalho. Durante a operação, a máquina de trabalho 10 se move ao longo do percurso de movimento B predefinido. O percurso de movimento B pode ser planejado de modo que as respectivas faixas de condução ideais para a máquina de trabalho 10 sejam predefinidas, por exemplo, para que se predefina adequadamente a sequência na qual a área de trabalho A deve ser percorrida. Por meio de um planejamento de faixas desse tipo, obstáculos no planejamento do percurso de movimento B podem ser considerados de forma correspondente. O percurso de movimento B também pode ser predefinido de tal modo que travessias duplas de seções parciais da área de trabalho A sejam, no mínimo amplamente, evitadas. Tais ferramentas de planejamento de faixas podem ser baseadas, por exemplo, em uma tecnologia conhecida como "Agricultura de Tráfego Controlado (CTF)".
[045] Além do percurso de movimento B, também é possível, por exemplo, determinar a velocidade de condução na qual o veículo de trabalho 10 pode ou deve se mover autonomamente em qualquer ponto da área de trabalho A. Também pode ser especificado, por exemplo, onde (posição) e/ou como (por exemplo, intensidade) o respectivo aparelho de tratamento 12 deve ser operado ao longo do percurso de movimento B (por exemplo, para distribuição de material de distribuição, colheita de cultura ou similares).
[046] É possível que um veículo de alimentação 16 seja provido para fornecer energia (por exemplo, energia elétrica ou combustível) à máquina de trabalho 10 e/ou para alimentar o aparelho de tratamento 12. O veículo de alimentação 16 pode, por exemplo, fornecer os materiais de distribuição a serem distribuídos em forma líquida e/ou sólida (particularmente, em forma granular). Se desejado, a máquina de trabalho 10 pode ser conduzida de maneira autônoma em direção ao veículo de alimentação 16 (vide Fig. 2). Durante o trabalho na área de trabalho A, a máquina de trabalho 10 pode percorrer o caminho em direção ao veículo de alimentação 16 com velocidade de condução igual ou diferente. O aparelho de tratamento pode ser movido, por exemplo, recolhido, em uma posição de transporte para a condução em direção ao veículo de alimentação 16. Adicional ou alternativamente, o veículo de alimentação 16 pode ser conduzido de maneira (parcial ou totalmente) autônoma em direção à máquina de trabalho 10. Por exemplo, uma posição de alimentação pode ser exibida para um motorista do veículo de alimentação 16, na qual a máquina de trabalho 10 pode ser encontrada para alimentação.
[047] É possível, por exemplo, que uma posição na qual o processo de trabalho da máquina de trabalho 10 seja interrompido seja armazenada durante a operação por meio da unidade de controle 14. Após a alimentação por meio do veículo de alimentação 16, a máquina de trabalho 10 pode se mover novamente para esta posição e continuar seu caminho ao longo do percurso de movimento B. Para isso, as rotas percorridas não precisam ser idênticas.
[048] Também é possível que a máquina de trabalho 10 possua um sistema para monitoramento de quantidades residuais. Em outras palavras, pode-se prover que a máquina de trabalho 10 tenha, por exemplo, sensores de monitoramento de estágio de enchimento (por exemplo, um sistema de pesagem, sistema de fluxo ou semelhante), por meio dos quais seja possível, em cada caso, determinar, por exemplo, a quantidade de material de distribuição restante na máquina de trabalho 10. A unidade de controle 14 pode, assim, determinar por quanto tempo o material a ser distribuído ainda é suficiente, ou seja, a distância de condução que ainda pode ser percorrida. Com base nessa avaliação, a máquina de trabalho 10 pode, então, ser controlada, por exemplo, de tal modo que seja processada uma rota ou uma seção de trajeto para a qual a taxa de aplicação ainda seja suficiente, ou a máquina de trabalho 10 é movida diretamente em direção ao veículo de alimentação 16 sem que uma seção adicional de trajeto seja iniciada.
[049] O método descrito para alimentação da máquina de trabalho 10 por meio do veículo de alimentação 16 também pode ser utilizado de maneira análoga para trabalhos de manutenção. Por exemplo, no caso de uma medida de manutenção a ser executada na máquina de trabalho 10, o percurso de movimento ideal para um "ponto de manutenção" estacionário ou móvel pode ser determinado, por exemplo, por meio da unidade de controle 14. O mesmo se aplica a falhas na máquina de trabalho 10. No caso de falhas, a unidade de controle 14 pode, por sua vez, avaliar se a máquina de trabalho 10 ainda pode ser movida para o "ponto de manutenção" ou não.
[050] Referência é feita novamente à Figura 1. Para navegação ao longo do percurso de movimento B predefinido, a máquina de trabalho 10 possui um primeiro dispositivo de determinação de posição 18 e um segundo dispositivo de determinação de posição 20. Os dispositivos de determinação de posição 18 e 20 são configurados para determinar uma posição atual da máquina de trabalho 10 independentemente um do outro. Os dois dispositivos de determinação de posição 18, 20 podem ser configurados para determinação de posição por satélite (global) ou como dispositivos de determinação de posição local. O primeiro dispositivo de determinação de posição 18 é, preferencialmente, um dispositivo de determinação de posição por satélite e o segundo dispositivo de determinação de posição 20 é um dispositivo de determinação de posição local.
[051] O dispositivo de determinação de posição por satélite pode ser, por exemplo, um dispositivo de determinação de posição GPS, um dispositivo de determinação de posição Galileo, um dispositivo de determinação de posição Glonass ou um dispositivo de determinação de posição Beidou.
[052] O dispositivo de determinação de posição local pode possuir um sistema de sensores de detecção periférica 22. O sistema de sensores de detecção periférica 22 pode possuir um dispositivo de radar, um dispositivo de escaneamento a laser, um dispositivo LIDAR e/ou um dispositivo de câmera. Pode-se prover, por exemplo, um dispositivo de radar omnidirecional (por exemplo, no lado de topo da máquina de trabalho 10) ou uma pluralidade de sensores de radar em lados diferentes da máquina de trabalho 10. O sistema de sensores de detecção periférica 22 pode, convenientemente, possuir uma pluralidade de dispositivos de sensor baseados em diferentes princípios físicos de medição. Os algoritmos de reconhecimento de imagem também podem ser aplicados aos registros do sistema de sensores de detecção periférica 22, a fim de identificar estruturas conhecidas (por exemplo, pontos de referência) nos registros.
[053] É possível que o sistema de sensores de detecção periférica 22 possua um veículo aéreo não tripulado (um drone) para monitoramento do entorno da máquina de trabalho 10 quanto a pontos de referência e/ou condições ambientais. O veículo aéreo não tripulado pode estar em conexão de comunicação com a unidade de controle 14 e pode, por exemplo, transportar um dispositivo de radar, LIDAR e/ou de câmera.
[054] O sistema de sensores de detecção periférica 22 pode ser convenientemente usado para detectar pontos de referência 24 predefinidos no entorno da máquina de trabalho 10. Cada um dos pontos de referência 24 pode possuir uma posição conhecida predefinida. Os pontos de referência 24 são, cada um, posicionados de modo que sua posição exata em relação à área de trabalho A seja conhecida. Particularmente, as posições podem ser medidas uma única vez por satélite. A posição pode ser detectada manualmente. No entanto, pode-se conceber também que os pontos de referência 24 meçam automaticamente sua posição exata.
[055] Uma posição atual da máquina de trabalho 10 pode ser determinada a partir das posições conhecidas dos pontos de referência 24 detectados. Podem ser determinadas, por exemplo, distâncias em relação aos pontos de referência 24 e/ou posições angulares em relação aos pontos de referência 24.
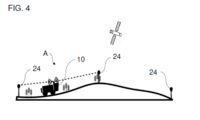
[056] As Figuras 4 e 5 mostram um exemplo de como postes ou estacas estacionários podem ser usados como pontos de referência 24. Os postes podem ser dispostos, por exemplo, nos limites externos da área de trabalho A. No entanto, os postes ou pontos de referência 24 também podem ser dispostos, no mínimo parcialmente, dentro ou fora da área de trabalho A. A altura, o tamanho e o número de postes ou pontos de referência 24 podem ser adaptados à área de trabalho A (tamanho, forma, irregularidades, plantação etc.).
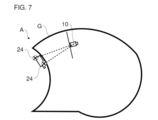
[057] As Figuras 6 e 7 mostram um exemplo de como postes móveis podem ser usados como pontos de referência 24. Os postes podem ser posicionados, por exemplo, em um veículo móvel (por exemplo, um reboque). A posição atual dos postes ou pontos de referência 24 é determinada inicialmente, por exemplo, após o veículo móvel ter sido estacionado e é armazenada na unidade de controle 14 da máquina de trabalho 10.
[058] Os pontos de referência 24 podem ser providos com uma marcação específica, de modo que os pontos de referência 24 possam ser identificados inequivocamente, por exemplo, com o uso de um algoritmo de reconhecimento de imagem. Os pontos de referência 24 também podem possuir um refletor ou uma fonte de sinal (por exemplo, fonte de luz) que facilite ou possibilite a detecção por meio do sistema de sensores de detecção periférica 22.
[059] Os pontos de referência 24 podem ser no mínimo parcialmente artificiais, como os postes descritos. Também é possível usar um edifício, uma turbina eólica, um poste de eletricidade, outro veículo, uma estrada, uma instalação solar ou um limite de campo ou similares como um ponto de referência 24 com uma posição conhecida predefinida. Além dos pontos de referência 24 artificiais, pontos de referência naturais também podem ser usados. Por exemplo, formações rochosas, formações vegetais, relevos, corpos de água ou similares, podem ser usados como pontos de referência 24 com uma posição predefinida conhecida.
[060] Também é possível que, por exemplo, um dispositivo de determinação de posição local adicional ou alternativo seja incluído para detectar uma posição atual da máquina de trabalho 10. A máquina de trabalho 10 pode possuir um dispositivo de odometria e/ou um dispositivo de medição inercial como um dispositivo de determinação de posição local. O dispositivo de odometria pode detectar uma distância percorrida pela máquina de trabalho 10, por exemplo, por meio de sensores de rotação das rodas. O dispositivo de medição inercial pode detectar uma velocidade, uma aceleração, uma rodagem, uma inclinação e/ou uma guinada da máquina de trabalho 10, por exemplo, por meio de giroscópios, sensores de velocidade e sensores de aceleração. Os dados do dispositivo de odometria e/ou de um dispositivo de medição inercial podem ser utilizados para rastrear um caminho da máquina de trabalho 10 a partir de uma posição conhecida e, assim, detectar uma posição atual da máquina de trabalho.
[061] A máquina de trabalho 10 pode, convenientemente, ser operada em pelo menos dois modos de operação: um modo de operação manual e um modo de operação autônoma. No modo de operação manual, é realizada uma operação que conduz a movimentos e trabalhos da máquina de trabalho 10 com base nas instruções de operação manual por um operador, por exemplo, usando um controle remoto. No modo de operação autônoma, a máquina de trabalho 10 é controlada de maneira (parcial ou totalmente) autônoma por meio da unidade de controle 14, particularmente com base nos valores nominais especificados por meio da ferramenta de planejamento de faixas. Uma ativação do modo de operação autônoma pode ser vinculada a certas condições: por exemplo, sem obstáculos no entorno da máquina de trabalho 10, campo de visão do sistema de sensores de detecção periférica 22 adequado para a velocidade de condução desejada e/ou detecção da posição atual da máquina de trabalho 10 com precisão suficiente.
[062] A FIG. 8 mostra um diagrama do método exemplar para a operação autônoma da máquina de trabalho 10. O método pode ser realizado, por exemplo, por meio da unidade de controle 14. Para essa finalidade, a unidade de controle 14 pode receber dados dos primeiro e segundo dispositivos de determinação de posição 18 e 20.
[063] Em uma etapa S10, uma primeira posição atual da máquina de trabalho 10 pode ser determinada por meio do primeiro dispositivo de determinação de posição 18.
[064] Em uma etapa S12, uma segunda posição atual da máquina de trabalho 10 pode ser determinada por meio do segundo dispositivo de determinação de posição 20. A segunda posição atual é determinada independentemente da primeira posição atual.
[065] Preferencialmente, a primeira e a segunda posição atuais são determinadas simultaneamente. No entanto, também é possível que a primeira e a segunda posições atuais sejam determinadas em momentos diferentes. Ao se conhecer uma velocidade de condução e uma direção de condução da máquina de trabalho 10, a primeira e a segunda posições atuais podem ser convertidas em uma base de tempo comum (simultânea), por exemplo, por interpolação.
[066] É possível que a primeira posição atual e a segunda posição atual se refiram a diferentes sistemas de coordenadas, por exemplo, a um sistema de coordenadas global e um sistema de coordenadas local integrado à máquina de trabalho 10. Para permitir que as posições sejam comparadas, as transformações de coordenadas correspondentes podem, portanto, ser realizadas com relação à primeira posição atual ou à segunda posição atual.
[067] Em uma etapa S14, um valor de desvio entre a primeira posição atual e a segunda posição atual pode ser determinado. O valor de desvio pode ter uma distância das posições nas direções x, y e/ou z. O valor de desvio pode ter um desvio de orientação ou um desvio angular em torno dos eixos x, y e/ou z. O valor de desvio indica o quanto a posição atual difere da segunda posição atual. A máquina de trabalho 10 pode ser operada de maneira autônoma por meio da unidade de controle 14 em função de uma grandeza do valor de desvio.
[068] Por exemplo, na etapa S16, o valor de desvio pode ser comparado a um valor limite predefinido para se decidir como a máquina de trabalho 10 deve continuar a ser operada de maneira autônoma. Se o valor do desvio exceder o valor limite (+), o método pode continuar com uma etapa S18. Se o valor do desvio não exceder o valor limite (-), o método pode continuar com uma etapa S20.
[069] Na etapa S18, isto é, se o desvio entre a primeira e a segunda posições atuais for muito grande, diferentes alterações podem ser feitas na operação autônoma da máquina de trabalho 10. Por exemplo, a máquina de trabalho 10 pode parar de forma autônoma, ser desligada ou colocada em um estado seguro, por exemplo, pela interrupção adicional de um tratamento por meio do dispositivo de tratamento 12. Também é possível que, por exemplo, uma velocidade de condução atual ou máxima permitida da máquina de trabalho 10 seja reduzida. Posteriormente, o processo pode ser finalizado. Alternativamente, o método pode recomeçar com as etapas S10 e S12 se, por exemplo, uma reinicialização autônoma da máquina de trabalho 10 também for desejada.
[070] Na etapa S20, isto é, se houver pouco ou nenhum desvio entre a primeira e a segunda posições atuais, uma operação atual da máquina de trabalho 10 pode ser, particularmente, continuada. É possível que a máquina de trabalho 10 continue sua condução e/ou tratamento, conforme planejado originalmente com a ferramenta de planejamento de faixas. Também é possível que uma velocidade de condução atual ou máxima admissível da máquina de trabalho 10 seja mantida ou mesmo aumentada. O método pode, então, recomeçar com as etapas S10 e S12.
[071] Para a navegação da máquina de trabalho 10 ao longo do percurso de movimento B, um valor médio ponderado pode ser determinado, por exemplo, a partir da primeira e da segunda posições atuais determinadas. As ponderações podem ser estáticas ou dinâmicas (por exemplo, em função das informações de qualidade relacionadas aos respectivos sinais de posição).
[072] O valor limite pode ser de vários estágios. Por exemplo, para múltiplas ações autônomas possíveis da máquina de trabalho 10, pode-se prover, pelo menos parcialmente, os estágios correspondentes ao valor limite. Assim pode-se prover, por exemplo, um estágio de valor limite relativamente grande, que, caso excedido, desligue de maneira autônoma a máquina de trabalho 10. Pode-se prover um estágio de valor limite comparativamente mais baixo, que, caso excedido, provoque (somente) uma redução autônoma da velocidade de condução da máquina de trabalho 10, desde que o estágio de valor limite relativamente alto mencionado anteriormente não seja excedido.
[073] O valor limite pode ser variável. Por exemplo, o valor limite pode depender de uma velocidade de condução atual da máquina de trabalho 10. Se uma velocidade de condução aumentar e, consequentemente, o risco de um acidente aumentar, o valor limite pode diminuir. No entanto, o valor limite pode aumentar se a velocidade de condução diminuir e, consequentemente, reduzir um risco de um acidente. Alternativa ou adicionalmente, o valor limite também pode ser dependente da posição. Por exemplo, o valor limite pode diminuir se a (por exemplo, primeira e/ou segunda) posição atual indicar um posicionamento da máquina de trabalho 10 em uma zona de perigo espacial predefinida dentro ou fora da área de trabalho A. Por exemplo, a máquina de trabalho 10 pode ser conduzida perto de uma estrada, de um declive, de um edifício ou de uma pessoa. Por outro lado, o valor limite pode aumentar se a posição atual estiver fora da zona de perigo espacial predefinida ou se a máquina de trabalho 10 se afastar da zona de perigo espacial predefinida.
[074] A invenção não se limita aos exemplos de modalidades preferenciais descritos acima. Em vez disso, uma multiplicidade de variantes e modificações são possíveis, as quais, da mesma forma, fazem uso do conceito da invenção e, além disso, recaem no escopo da proteção. Particularmente, a invenção também reivindica proteção para a finalidade e as características das reivindicações dependentes, independentemente das reivindicações referenciadas. Particularmente, as características individuais da reivindicação independente 1 são divulgadas independentemente entre si. Além disso, as características das reivindicações dependentes também são divulgadas independentemente de todas as características da reivindicação independente 1.
Lista dos sinais de referência
10 Máquina de trabalho agrícola autônoma
12 Aparelho de tratamento
14 Unidade de controle
16 Veículo de alimentação
18 Primeiro dispositivo de determinação de posição
20 Segundo dispositivo de determinação de posição
22 Sistema de sensores de detecção periférica
24 Pontos de referência
A Área de trabalho
B Percurso de movimento
G Limite
S10-S20 Etapas do método
Lista dos sinais de referência
10 Máquina de trabalho agrícola autônoma
12 Aparelho de tratamento
14 Unidade de controle
16 Veículo de alimentação
18 Primeiro dispositivo de determinação de posição
20 Segundo dispositivo de determinação de posição
22 Sistema de sensores de detecção periférica
24 Pontos de referência
A Área de trabalho
B Percurso de movimento
G Limite
S10-S20 Etapas do método
Claims (16)
- Método para operação de uma máquina de trabalho agrícola autônoma (10), caracterizado pelo fato de que compreende:
a determinação de uma primeira posição atual da máquina de trabalho agrícola (10) por meio de um primeiro dispositivo de determinação de posição (18);
a determinação de uma segunda posição atual da máquina de trabalho agrícola (10) por meio de um segundo dispositivo de determinação de posição (20);
a determinação de um valor de desvio relacionado a uma diferença entre a primeira posição atual e a segunda posição atual; e
a operação autônoma da máquina de trabalho agrícola autônoma (10) em função do valor de desvio determinado. - Método, de acordo com a reivindicação 1, caracterizado pelo fato de que:
a determinação da primeira posição atual e a determinação da segunda posição atual podem ser realizadas simultaneamente ou dentro de um período predefinido. - Método, de acordo com a reivindicação 1 ou 2, caracterizado pelo fato de que:
a determinação da primeira posição atual e a determinação da segunda posição atual são realizadas em momentos diferentes; e
a primeira posição atual ou a segunda posição atual são convertidas em uma base de tempo comum, preferencialmente levando-se em consideração uma velocidade de condução e/ou uma direção de condução da máquina de trabalho agrícola autônoma (10). - Método, de acordo com qualquer uma das reivindicações 1 a 3, caracterizado pelo fato de que:
o primeiro dispositivo de determinação de posição (18) é projetado separadamente e/ou independentemente do segundo dispositivo de determinação de posição (20); e/ou
o primeiro dispositivo de determinação de posição (18) e/ou o segundo dispositivo de determinação de posição (20) é incluído na máquina de trabalho agrícola autônoma (10). - Método, de acordo com qualquer uma das reivindicações 1 a 4, caracterizado pelo fato de que a operação da máquina de trabalho agrícola autônoma (10) compreende:
parar, imobilizar, transferir para um estado seguro, interromper um tratamento, reduzir a velocidade de condução atual e/ou reduzir uma velocidade máxima admissível da máquina de trabalho agrícola autônoma (10) se o valor de desvio determinado exceder um valor limite predefinido, preferencialmente variável e/ou de vários estágios; e/ou
continuar com uma condução, continuar com um tratamento, operar conforme um planejamento prévio, aumentar ou manter uma velocidade de condução atual e/ou aumentar ou manter uma velocidade máxima admissível de condução da máquina de trabalho agrícola autônoma (10) se o valor de desvio determinado não exceder um valor limite predefinido, preferencialmente variável e/ou de vários estágios. - Método, de acordo com a reivindicação 5, caracterizado pelo fato de que:
o valor limite depende da velocidade de condução atual da máquina de trabalho agrícola autônoma (10),
em que, preferencialmente:
o valor limite diminui com o aumento da velocidade de condução atual e/ou aumenta com a diminuição da velocidade de condução atual. - Método, de acordo com a reivindicação 5 ou 6, caracterizado pelo fato de que:
o valor limite é dependente da posição, preferencialmente dependente da primeira posição atual e/ou da segunda posição atual,
em que, preferencialmente:
o valor limite diminui se a primeira posição atual e/ou a segunda posição atual estiver dentro de uma área de perigo espacial predefinida, preferencialmente estacionária ou móvel, ou se a máquina de trabalho agrícola autônoma (10) se aproximar da zona de perigo espacial predefinida; e/ou
o valor limite aumenta se a primeira posição atual e/ou a segunda posição atual estiver fora de uma zona de perigo espacial predefinida, preferencialmente estacionária ou móvel, ou se a máquina de trabalho agrícola autônoma (10) se afastar da zona de perigo espacial predefinida. - Método, de acordo com qualquer uma das reivindicações 1 a 7, caracterizado pelo fato de que:
o primeiro dispositivo de determinação de posição (18) é um dispositivo de determinação de posição por satélite e o segundo dispositivo de determinação de posição (20) é um dispositivo de determinação de posição local; ou
o primeiro dispositivo de determinação de posição (18) e o segundo dispositivo de determinação de posição (20) são, cada um, um dispositivo de determinação de posição local; ou
o primeiro dispositivo de determinação de posição (18) e o segundo dispositivo de determinação de posição (20) são, cada um, um dispositivo de determinação de posição por satélite. - Método, de acordo com a reivindicação 8, caracterizado pelo fato de que:
o dispositivo de determinação de posição local compreende um sistema de sensores de detecção periférica (22) da máquina de trabalho agrícola autônoma (10), compreendendo preferencialmente um dispositivo de radar, um dispositivo de escaneamento a laser, um dispositivo LIDAR, um dispositivo de câmera e/ou um veículo aéreo não tripulado. - Método, de acordo com a reivindicação 8 ou 9, caracterizado pelo fato de que:
o dispositivo de determinação de posição local é projetado para detectar ou determinar uma distância e/ou uma posição angular entre a máquina de trabalho agrícola autônoma (10) e pelo menos um ponto de referência (24) predefinido disposto em uma posição predefinida, preferencialmente para determinar uma posição atual da máquina de trabalho agrícola autônoma (10). - Método, de acordo com a reivindicação 10, caracterizado pelo fato de que:
o pelo menos um ponto de referência (24) é pelo menos parcialmente artificial, compreendendo preferencialmente um poste, um edifício, uma turbina eólica, um poste de eletricidade, outro veículo, uma estrada, uma instalação solar e/ou um limite de campo; e/ou
o pelo menos um ponto de referência (24) é pelo menos parcialmente natural, compreendendo preferencialmente uma formação rochosa, uma formação vegetal, um relevo e/ou um corpo de água. - Método, de acordo com a reivindicação 10 ou 11, caracterizado pelo fato de que:
o pelo menos um ponto de referência (24) é estacionário ou móvel; e/ou
o pelo menos um ponto de referência (24) é provido com uma marcação, preferencialmente para um algoritmo de processamento de imagem de um dispositivo de câmera, e/ou de um refletor ou de uma fonte de sinal, preferencialmente para detecção para um sistema de sensores de detecção periférica (22). - Método, de acordo com qualquer uma das reivindicações 9 a 12, caracterizado pelo fato de que:
o sistema de sensores de detecção periférica (22) compreende um dispositivo de radar, por meio do qual é detectada uma distância e/ou uma posição angular entre a máquina de trabalho agrícola autônoma (10) e pelo menos um ponto de referência (24), preferencialmente um poste, e então a primeira ou a segunda posição atual é determinada,
em que, preferencialmente:
o dispositivo de radar compreende um sensor de radar omnidirecional; e/ou
o dispositivo de radar compreende um sensor de radar em cada um dos dois lados longitudinais externos da máquina de trabalho agrícola autônoma (10). - Método, de acordo com qualquer uma das reivindicações 8 a 13, caracterizado pelo fato de que:
o dispositivo de determinação de posição local compreende um dispositivo de odometria para detecção de uma distância percorrida pela máquina de trabalho agrícola autônoma (10) e/ou um dispositivo de medição inercial para detecção de uma velocidade, de uma aceleração, de uma rodagem, de uma inclinação e/ou de uma guinada da máquina de trabalho (10). - Método, de acordo com qualquer uma das reivindicações 1 a 14, caracterizado pelo fato de que:
a máquina de trabalho agrícola autônoma (10) é projetada para condução autônoma em uma área de trabalho (A) espacial predefinida ao longo de um percurso de movimento (B) predefinido, compreendendo preferencialmente uma pluralidade de pistas ou faixas paralelas, preferencialmente com uma especificação de velocidade máxima admissível de condução e/ou preferencialmente executando um tratamento de solo e/ou de vegetais associado à máquina de trabalho agrícola autônoma (10) em posições predefinidas ao longo do percurso de movimento (B). - Máquina de trabalho agrícola autônoma (10), caracterizada pelo fato de que compreende um primeiro dispositivo de determinação de posição (18);
um segundo dispositivo de determinação de posição (20); e uma unidade de controle (14) que é configurada para executar um método conforme definido em qualquer uma das reivindicações 1 a 15.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DEDE102019111315.6 | 2019-05-02 | ||
| DE102019111315.6 | 2019-05-02 | ||
| DE102019111315.6A DE102019111315A1 (de) | 2019-05-02 | 2019-05-02 | Autonome landwirtschaftliche Arbeitsmaschine und Verfahren zu deren Betrieb |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| BR102020008648A2 true BR102020008648A2 (pt) | 2020-11-10 |
| BR102020008648B1 BR102020008648B1 (pt) | 2025-12-02 |
Family
ID=
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20230094371A1 (en) * | 2021-09-30 | 2023-03-30 | Zimeno, Inc. Dba Monarch Tractor | Vehicle row follow system |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20230094371A1 (en) * | 2021-09-30 | 2023-03-30 | Zimeno, Inc. Dba Monarch Tractor | Vehicle row follow system |
| US11981336B2 (en) * | 2021-09-30 | 2024-05-14 | Zimeno Inc. | Vehicle row follow system |
| US20240300499A1 (en) * | 2021-09-30 | 2024-09-12 | Zimeno Inc. | Vehicle row follow system |
| US12365347B2 (en) * | 2021-09-30 | 2025-07-22 | Zimeno Inc. | Vehicle row follow system |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102019111315A1 (de) | 2020-11-05 |
| US20200356096A1 (en) | 2020-11-12 |
| UA130247C2 (uk) | 2025-12-31 |
| US12105511B2 (en) | 2024-10-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12105511B2 (en) | Autonomous agricultural working machine and method of operation | |
| USRE48509E1 (en) | Raster-based contour swathing for guidance and variable-rate chemical application | |
| JP6312416B2 (ja) | 圃場作業機 | |
| US11678599B2 (en) | Method and system for estimating surface roughness of ground for an off-road vehicle to control steering | |
| EP3878258B1 (en) | Method and system for estimating surface roughness of ground for an off-road vehicle to control ground speed | |
| US9002566B2 (en) | Visual, GNSS and gyro autosteering control | |
| JP6415810B2 (ja) | 圃場作業機 | |
| EP3878257B1 (en) | Method and system for estimating surface roughness of ground for an off-road vehicle to control ground speed | |
| JP7659659B2 (ja) | 自動運転を行う農業機械のための経路計画システム | |
| BR112019016644B1 (pt) | Sistema para controlar a aspersão de produto agrícola, método para controlar um bocal de aspersão de um braço de aspersão de uma máquina agrícola e uma máquina agrícola | |
| US20240338037A1 (en) | Path planning system and path planning method for agricultural machine performing self-traveling | |
| JP2015112071A (ja) | 圃場作業機 | |
| JPWO2023106158A5 (pt) | ||
| JP2018075027A (ja) | 圃場作業機 | |
| BR102020008648B1 (pt) | Máquina de trabalho agrícola autônoma e método para sua operação | |
| JP6970151B2 (ja) | 乗用圃場作業機 | |
| JP7757920B2 (ja) | 作業車両 | |
| JP7074794B2 (ja) | 圃場作業機 | |
| US20260124912A1 (en) | Speed control system for an agricultural machine | |
| US12610878B2 (en) | Method for ascertaining status information regarding a status of an agricultural working tool of an agricultural working machine | |
| JP7270309B2 (ja) | 田畑の除草システム、田畑用散布材の散布システム、田畑植付けシステム及び水田用肥料散布システム | |
| JP2024122247A (ja) | 作業車両 | |
| Facchinetti et al. | Robotic Platform for Complex Agricultural | |
| Moeller | GPS-Guided Autonomous Robot with Obstacle Avoidance and Path Optimization | |
| BR102023022477A2 (pt) | Método, dispositivo de controle e sistema de esterçamento para esterçamento automatizado de um veículo agrícola e veículo agrícola |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| B03A | Publication of a patent application or of a certificate of addition of invention [chapter 3.1 patent gazette] | ||
| B06W | Patent application suspended after preliminary examination (for patents with searches from other patent authorities) chapter 6.23 patent gazette] | ||
| B09A | Decision: intention to grant [chapter 9.1 patent gazette] | ||
| B16A | Patent or certificate of addition of invention granted [chapter 16.1 patent gazette] |
Free format text: PRAZO DE VALIDADE: 20 (VINTE) ANOS CONTADOS A PARTIR DE 30/04/2020, OBSERVADAS AS CONDICOES LEGAIS |