BRPI0822301B1 - um método e um dispositivo para seleção automática ou semiautomática de uma melhor marcha de partida em um veículo - Google Patents
um método e um dispositivo para seleção automática ou semiautomática de uma melhor marcha de partida em um veículo Download PDFInfo
- Publication number
- BRPI0822301B1 BRPI0822301B1 BRPI0822301-7A BRPI0822301A BRPI0822301B1 BR PI0822301 B1 BRPI0822301 B1 BR PI0822301B1 BR PI0822301 A BRPI0822301 A BR PI0822301A BR PI0822301 B1 BRPI0822301 B1 BR PI0822301B1
- Authority
- BR
- Brazil
- Prior art keywords
- vehicle
- exit
- gear
- starting gear
- transmission
- Prior art date
Links
Images


Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/02—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used
- F16H61/0202—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being electric
- F16H61/0204—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being electric for gearshift control, e.g. control functions for performing shifting or generation of shift signal
- F16H61/0213—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being electric for gearshift control, e.g. control functions for performing shifting or generation of shift signal characterised by the method for generating shift signals
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
- B60T7/122—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger for locking of reverse movement
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2201/00—Particular use of vehicle brake systems; Special systems using also the brakes; Special software modules within the brake system controller
- B60T2201/06—Hill holder; Start aid systems on inclined road
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/02—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used
- F16H61/0202—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being electric
- F16H61/0204—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being electric for gearshift control, e.g. control functions for performing shifting or generation of shift signal
- F16H61/0213—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being electric for gearshift control, e.g. control functions for performing shifting or generation of shift signal characterised by the method for generating shift signals
- F16H2061/023—Drive-off gear selection, i.e. optimising gear ratio for drive off of a vehicle
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed- or reversing-gearings for conveying rotary motion
- F16H59/60—Inputs being a function of ambient conditions
- F16H59/66—Road conditions, e.g. slope, slippery
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Control Of Transmission Device (AREA)
- Regulating Braking Force (AREA)
Abstract
UM MÉTODO E UM DISPOSITIVO PARA SELEÇÃO AUTOMÁTICA OU SEMIAUTOMÁTICA DE UMA MELHOR MARCHA DE PARTIDA EM UM VEÍCULO. A presente invenção se refere a um método e a um dispositivo para seleção automática de uma melhor marcha de partida em um veículo. Em concordância com a presente invenção, referido método compreende as seguintes etapas executadas na ordem mencionada: - engate de uma primeira marcha de partida (S2, S32); -sobre demanda de motorista controle de torque de propulsão de veículo de uma maneira tal a tentar conseguir uma primeira saída (S3, S33); - se a primeira marcha de partida é excessivamente alta, interrupção da primeira saída e frenagem do veículo (S4, S34); - engate de uma segunda marcha de partida que é uma marcha mais baixa comparada com referida primeira marcha de partida (S8, S38); - controle de torque de propulsão de uma maneira tal a tentar conseguir uma segunda saída de veículo; e -se referida segunda tentativa de saída resulta em uma transmissão de torque para rodas de tração do veículo sendo suficiente de maneira a desempenhar uma saída, então parar frenagem do veículo (S9, S39). A vantagem é a de que uma marcha de partida erroneamente selecionada é automaticamente mudada. A mudança (...).
Description
A presente invenção se refere a um método para seleção automática ou semiautomática de uma melhor marcha de partida em um veículo em concordância com o preâmbulo de reivindicação de patente independente 1 posteriormente.
A presente invenção também se refere a um veículo compreendendo uma unidade de controle disposta para desempenhar etapas para seleção automática ou semiautomática de uma melhor marcha de partida em concordância com o preâmbulo de reivindicação de patente independente 7 posteriormente.
A presente invenção também se refere a um programa de computador e a produtos de programa de computador para realização de referido método.
Transmissões Mecânicas Automáticas [Automatic Mechanical Transmissions (AMT:s)] têm se tornado ainda mais e mais comuns em veículos mais pesados com o desenvolvimento crescente de sistemas de microprocessador, tornando possível, com um computador de controle e um número de dispositivos de controle, tais como servo motores, por exemplo, precisamente se regular a velocidade de motor, o engate e o desengate de uma embreagem de disco automática entre motor e caixa de marchas, e os membros de embreagem de caixa de marchas uns em relação aos outros, de maneira que mudanças de marcha suavizadas são sempre conseguidas na correta velocidade de motor.
Uma caixa de marchas do tipo AMT usualmente compreende um eixo de entrada, um eixo intermediário, que possui pelo menos uma malha de engrenagem denteada com uma engrenagem denteada sobre o eixo de entrada, e eixo principal com engrenagens denteadas, cuja malha com engrenagens denteadas fica sobre o eixo intermediário. O eixo principal é então adicionalmente conectado para um eixo de saída acoplado para as rodas de tração por intermédio do eixo de propulsão, por exemplo. Cada par de engrenagens denteadas possui uma diferente relação de marcha a partir de um outro par de engrenagens na caixa de marchas. Diferentes relações de marcha são obtidas em que diferentes pares de engrenagens transmitem o torque a partir do motor para as rodas de tração.
O desenvolvimento de tecnologia de computador teve também um impacto sobre controle eletrônico e sistemas de resposta (alimentação) para um motor de veículo, e estes sistemas têm se tornado mais precisos, mais rápidos e mais adaptáveis para condições de motor e ambientais prevalecentes. A integridade do processo de combustão pode ser precisamente controlada em concordância com qualquer situação de operação. A alavanca de aceleração (válvula de regulagem) do veículo (um pedal de acelerador, por exemplo), que primariamente controla o suprimento de combustível para o motor, controla o motor do veículo por intermédio de cabeamento elétrico e sinais eletrônicos. A alavanca de aceleração é, conseqüentemente, equipada com sensores para detecção da posição de alavanca de aceleração, o que significa dizer que abertura de válvula de regulagem (aceleração) é requerida.
No processo de saída (take off) de veículo, uma embreagem de disco automática como descrita anteriormente é incluída na AMT e é usualmente controlada por intermédio de informação sobre a posição da alavanca de aceleração, a velocidade rotacional do motor, o torque de saída de motor, a posição da embreagem de disco, e a partir de uma posição de referência da embreagem de disco, que é selecionada sobre o fundamento de quando a embreagem de disco exatamente começa a transmitir torque (posição de tração), esta posição sendo relativamente fácil de se definir. Um torque tipicamente transmitido na posição de referência pode ser da ordem de 30 Hm. O torque de saída de motor é em sua maior parte calculado a partir da quantidade de combustível injetada para o motor. Na seqüência de partida e manobra, ao veículo tipicamente se deu partida a partir de um estado estacionário ou de um estado virtualmente estacionário, e o motor começa a seqüência em velocidade sem carga de motor. A posição da embreagem de disco e, portanto, o grau de engate, que determina o torque transmitido a partir do motor para a caixa de marchas, primariamente depende de onde o motorista posiciona a alavanca de aceleração. A posição de referência da embreagem de disco é utilizada para determinar ao motorista do veículo controle mais preciso da saída de veículo em que a embreagem de disco assume a posição de referência e imediatamente uma marcha de partida é selecionada e engatada. O veículo é preparado para saída imediata. Por conseqüência, em muitas situações o motorista experimenta somente um pequeno ponto plano, se algum, quando o pedal de acelerador é pressionado. O motorista, conseqüentemente, obtém uma resposta teoricamente direta e o veículo, em princípio, começa a se movimentar tão prontamente quanto o pedal de acelerador começa a ser pressionado.
A seleção de uma marcha de partida apropriada em uma AMT é normalmente fundamentada sobre um cálculo a partir de pelo menos parâmetros tais como inclinação de estrada e peso de veículo. Ainda que este cálculo cobre uma quantidade das situações de partida de veículo, uma marcha de partida selecionada irá algumas vezes se tornar correta devido para o fato de uma condição de veículo mudada, cálculo que não pode se antecipado. Uma tal situação pode existir quando um caminhão de longa distância foi estacionado com o caminhão sobre uma parte horizontal da estrada e o trailer em uma descida de encosta. A partir de um ponto de vista de seleção de marcha de partida, esta situação pode ficar ainda pior se o trailer e caminhão são estacionados vazios e então o trailer é carregado antes de uma saída. Um tal cálculo irá provavelmente não levar em consideração a mudança de peso do trailer e que ele foi estacionado em uma descida de encosta. Isto irá primordialmente fazer com que a AMT venha a selecionar uma marcha de partida excessivamente alta e uma saída de veículo mal sucedida é o mais provável de vir a acontecer devido para o aumento de peso do trailer e em que o trailer foi estacionado em uma descida de encosta, o que contra ataca a força de propulsão. 0 motorista irá ter que interromper uma tentativa de saída mal sucedida e impedir que o caminhão venha a rodar para trás (à ré), por exemplo, por ativação dos freios de serviço. Após isso, uma marcha de partida mais apropriada irá ter que ser selecionada manualmente na medida em que a unidade de controle da AMT não irá conhecer a condição mudada.
O pedido de patente internacional número W00242108 apresenta um exemplo de um procedimento de seleção de marcha de partida onde sucessiva redução de marcha é desempenhada se não suficiente aceleração de veículo puder ser desempenhada com uma primeira marcha de partida engatada.
Existe, conseqüentemente, uma necessidade para tornar mais fácil para o motorista manejar tais saídas (take offs) como mencionado anteriormente. Este é o objetivo primário da presente invenção descrito posteriormente.
Os recursos (meios) de consecução do objetivo da presente invenção levando-se em consideração o método em concordância com a presente invenção, são descritos na reivindicação de patente independente 1 subsequentemente e o dispositivo na reivindicação de patente independente 7 subsequentemente. As outras reivindicações de patente dependentes subsequentemente descrevem concretizações e desenvolvimentos do método em concordância com a presente invenção (reivindicações de patente dependentes 2 até 6 subseqüentemente).
O método em concordância com a presente invenção descreve um método para seleção automática ou semiautomática de uma melhor marcha de partida em um veículo. O método é caracterizado pelo fato de que compreende as seguintes etapas executadas na ordem mencionada:
- - seleção e engate de uma primeira marcha de partida de veículo no veículo parado;
- - sobre demanda de motorista controle de torque de propulsão de veículo por engate gradualmente de uma unidade de propulsão para rodas de tração do veículo de maneira a tentar conseguir uma primeira saída de veículo;
- - detecção de se referida primeira marcha de partida de veículo é excessivamente alta para uma condição prevalecente da primeira saída de veículo;
- - se a primeira marcha de partida de veículo é excessivamente alta então interrupção da primeira saída de veículo e automaticamente frenagem do veículo;
- - desengate de referida primeira marcha de partida de veículo;
- - seleção e engate de uma adaptada segunda marcha de partida que é uma marcha mais baixa comparada com referida primeira marcha de partida e que possui uma relação de marcha mais alta;
- - controle de torque de propulsão de veículo por engate gradualmente de referida unidade de propulsão para referidas rodas de tração de maneira a tentar conseguir uma segunda saída de veículo; e
- - se referida segunda tentativa de saída de veículo resulta em uma transmissão de torque para rodas de tração do veiculo sendo suficiente de maneira a desempenhar uma saída então parar frenagem do veículo.
A vantagem do método em concordância com a presente invenção é a de que uma marcha de partida erroneamente selecionada é automaticamente ou semiautomaticamente mudada. Uma vantagem adicional do método em concordância com a presente invenção é a de que a mudança de marcha de partida pode ser desempenhada em uma situação de subida de encosta. Por conseqüência, irá ser possível mudar a marcha de partida erroneamente selecionada sem o risco de que o veículo venha a rodar na direção errada.
Em concordância com uma segunda concretização vantajosa do método em concordância com a presente invenção, a etapa de detecção de que referida primeira saída de veículo não é possível com referida primeira marcha de partida é feita por cálculo de energia de calor desenvolvida na embreagem durante a primeira tentativa de saída de veículo e interrupção de referida primeira tentativa de saída de veículo se referida energia de calor excede um limite de energia de calor pré-determinado. Esta é uma maneira vantajosa de detecção de se uma marcha de partida foi erroneamente selecionada.
Em concordância com uma concretização adicional vantajosa do método em concordância com a presente invenção, a etapa de detecção de que referida primeira oartida de veículo não é possível com referida primeira tarcha de partida pode ser feita pelo motorista. A subsequente etapa de interrupção da primeira saída de veículo pode ser desempenhada manualmente pelo motorista. Isto determina liberdade operacional aumentada para o motorista. A etapa de interrupção da primeira saída de veículo pode ser desempenhada pelo motorista manualmente selecionando uma marcha mais baixa, por exemplo, por operação de uma alavanca de mudança de marcha.
Em concordância com uma concretização adicional vantajosa do método em concordância com a presente invenção, se referida segunda tentativa de saída resulta em transmissão de torque para as rodas de tração suficiente para manter o veículo pelo menos em parada, então continuando controle de engate de embreagem de uma embreagem até que a embreagem seja completamente engatada e o veículo sai. Este ponto no engate é uma indicação adicional de uma seleção de marcha de partida bem sucedida e de um processo de engate de embreagem bem sucedido.
Concretizações vantajosas adicionais da presente invenção são estabelecidas nas reivindicações de patente dependentes subseqüentemente.
A presente invenção irá ser descrita em maiores detalhes posteriormente com referência para os Desenhos das Figuras acompanhantes, que por intermédio de exemplo, mostram concretizações preferidas adicionais da presente invenção.
Os Desenhos das Figuras mostram:
Figura 1 mostra um diagrama esquemático de uma concretização de um dispositivo para consecução dos objetivos da presente invenção.
Figura 2 e a Figura 3 mostram dois diferentes diagramas de fluxo apresentando as diferentes etapas de duas diferentes concretizações da presente invenção.
Figura 4 mostra diagramaticamente um dispositivo de computador que é utilizado em concordância com uma concretização da presente invenção.
Os Desenhos das Figuras mostram:
Figura 1 mostra um diagrama esquemático de uma concretização de um dispositivo para consecução dos objetivos da presente invenção.
Figura 2 e a Figura 3 mostram dois diferentes diagramas de fluxo apresentando as diferentes etapas de duas diferentes concretizações da presente invenção.
Figura 4 mostra diagramaticamente um dispositivo de computador que é utilizado em concordância com uma concretização da presente invenção.
As Figuras são somente representações esquemáticas e a presente invenção não está limitada para as concretizações nelas representadas.
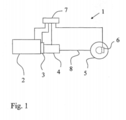
A Figura 1 esquematicamente apresenta um trem de tração (1) de um veículo com dispositivo de frenagem (6), que, no exemplo mostrado, é disposto para frear a roda de tração (5) do veículo. Referida roda (5) é fracionada por uma unidade de propulsão (2) por intermédio de uma transmissão automática de marcha em estágio (3, 4) e um eixo de propulsão (8) de uma maneira conhecida. A transmissão automática pode ser compreendida de: uma embreagem (3) e uma transmissão manual automatizada (AMT) (4), ou uma transmissão de embreagem dupla (DCT) (3) e (4), ou um conversor de torque (3) e uma caixa de marchas automática (4) . Referida unidade de propulsão pode ser um motor de combustão ou uma combinação de um motor de combustão e um motor/gerador elétrico, combinação assim chamada de veículo elétrico híbrido [hybrid electric vehicle (HEV)] . 0 dispositivo de frenagem (6) é, no exemplo mostrado, apresentado como um freio de serviço que, por exemplo, pode ser controlado pelo motorista do veículo através de um pedal de freio (não mostrado) de uma maneira conhecida. Para a presente invenção, é também possível utilizar outros dispositivos de frenagem no veículo em combinação com o freio de serviço, ou ao invés de referido freio de serviço, dispositivos tais como freios auxiliares ou freios elétricos (por exemplo, referido motor/gerador) para parar o veículo.
Uma unidade de controle (7) pode ser disposta para controlar a unidade de propulsão (2) e sua saída de torque, a transmissão automática (3, 4) e o dispositivo de frenagem (6) em concordância com diferentes sinais de saída, tais como velocidades rotacionais de unidade de propulsão, velocidades rotacionais de eixo de entrada/saída de referida transmissão, marcha selecionada na transmissão e entrada de motorista através de, por exemplo, um pedal de acelerador e um pedal de freio, de uma maneira conhecida. Referida unidade de controle pode, em uma concretização alternativa da presente invenção, ser compreendida de duas ou de diversas unidades de controle conectadas, por exemplo, através de uma rede. Referidas funções de controle, em concordância com a presente invenção, podem ser divididas entre referidas unidades de controle.
Em concordância com uma concretização da presente invenção, a unidade de controle (7) é programada para selecionar e engatar uma primeira marcha de partida de veículo em parada de veículo, e referida transmissão sendo desengatada a partir da unidade de propulsão (2). Ver (S2) no fluxograma na Figura 2, onde a sequência de controle se inicia em (Sl). Uma marcha de partida pode, por exemplo, ser automaticamente selecionada e engatada se o motorista tiver escolhido um modo automático através de uma alavanca de mudança de marcha (não mostrada). Pode também ser possível para o motorista fazer uma seleção manual da marcha de partida, ainda que o engate como tal da marcha seja desempenhado pela unidade de controle. O significado da transmissão (3, 4) sendo desengatada a partir da unidade de propulsão (2) pode, por exemplo, ser uma embreagem desengatada {3), disposta entre a unidade de propulsão (2) e uma transmissão engatada em etapa (DCT ou AMT com uma embreagem) ou um conversor de torque vazio de óleo, significando que o conversor de torque não irá transmitir qualquer torque a partir da unidade de propulsão (2) para a transmissão engatada em etapa. A unidade de controle <7) é adicionalmente programada para, sobre demanda de motorista, por exemplo, através do pedal de acelerador, controlar torque de propulsão de veiculo produzido por referida unidade de propulsão (2) e engate de referida transmissão para a unidade de propulsão (2) de uma maneira tal a tentar conseguir uma primeira saída de veículo [(S3) na Figura 2]. A tentativa de saída tal como é desempenhada de uma maneira conhecida. Por consequência, a unidade de propulsão (2) é gradualmente engatada com a transmissão e mais e mais torque entregue pela unidade de propulsão (2) é transmitido para a roda de tração (5). Se a primeira marcha de partida é excessivamente alta, o que significa dizer, a relação de marcha é excessivamente baixa, irá existir excessivo desgaste de embreagem se a transmissão é compreendida de uma embreagem do tipo de lamela, tal como em uma AMT com uma embreagem automatizada ou uma DCT. Uma mensuração deste desgaste pode ser a de calcular energia de calor criada durante deslizamento (patinação) de embreagem. Isto pode ser feito por levar em consideração o torque e multiplicar o mesmo pela diferença de velocidade rotacíonal ao longo da embreagem e integrar a soma multiplicada ao longo do tempo. Se o calor criado calculado durante o deslizamento de embreagem da primeira saída de veículo está acima de um valor pré-determinado, a unidade de controle é, em concordância cora a presente invenção, programada para detectar isto como referida primeira marcha de partida sendo uma para marcha de partida alta [ (S4) e ("sim") na Figura 2]. Por consequência, a primeira marcha de partida é erroneamente selecionada para a situação de partida de veículo prevalecente. Se a marcha de partida não é excessivamente alta, então a unidade de controle é programada para completar a tentativa de saída [(S5) e ("não") na Figura 2].
Se a marcha de partida é excessivamente alta, a unidade de controle (7) irá então automaticamente interromper (S6) a primeira saída de veículo e frear o veículo por ativação de referido dispositivo de frenagem e então desengate (S7) de referida primeira marcha de partida de veículo. Quando o dispositivo de frenagem é ativado, o veículo é parado e/ou impedido a partir de rolagem na direção de deslocamento oposta comparada com a direção de deslocamento selecionada, por exemplo, quando partindo em uma subida de encosta. Quando a primeira marcha de partida é desengatada, a unidade de controle é programada para selecionar e engatar uma segunda marcha de partida de veículo que é uma marcha mais baixa comparada com referida primeira marcha de partida (S8), por conseqüência, esta segunda marcha de partida possui uma relaçao de marcha mais alta comparada com a primeira marcha de partida. Em uma concretização da presente invenção, a unidade de controle pode ser programada para diretamente selecionar a marcha de partida a mais baixa possível depois de uma primeira tentativa de saída interrompida. Quando a segunda marcha de partida é engatada, a unidade de controle é programada para iniciar uma segunda tentativa de saída de veículo (S9) por controle de torque de propulsão produzido por referida unidade de propulsão e engate de referida transmissão de uma maneira tal a conseguir uma segunda saída de veículo. A sequência na Figura 2 é finalizada pela completação da segunda tentativa de saída com a marcha de partida a mais baixa possível.
A primeira tentativa de saída de veículo foi iniciada pela manobra do motorista, por exemplo, por um pedal de acelerador, e demanda de uma determinada saída de torque a partir da unidade de propulsão. Esta entrada de motorista encaminha a unidade de controle para controlar a unidade de propulsão e a embreagem (ou conversor de torque) de uma maneira pré-determinada. O motorista tem a possibilidade de continuar demandando a mesma saída de torque antes da segunda tentativa de saída, por consequência, o motorista pode continuar demandando a mesma saída de torque durante referidas ambas as tentativas de saída. Se referida segunda tentativa de saída de veículo resulta em uma transmissão de torque para a roda de tração (5) suficiente para desempenhar uma saída, então a unidade de controle é, em concordância com a presente invenção, programada para desativar referido dispositivo de frenagem (6) [ver também (S9)]. A desativação do dispositivo de frenagem (6) pode ser feita gradualmente em uma maneira controlada pré-definida e segue o aumento gradual de torque transmitido para a roda de tração (5) . Referida desativação controlada do dispositivo de frenagem (6) é conhecida como tal. Também durante a segunda tentativa de saída, o desgaste de embreagem pode ser mensurado por cálculo de energia de calor e comparado com um valor pré-determinado. Se o valor de energia de calor calculado está abaixo do valor pré-determinado e a transmissão de torque para a roda de tração (5) é suficiente de maneira a manter o veículo pelo menos em parada e o dispositivo de frenagem (6) tiver sido desativado, então referida unidade de controle é programada para continuar a engatar a embreagem até que ela seja completamente engatada e o veículo sai.
Em uma concretização alternativa da presente invenção, apresentada na Figura 3, o processo de partida anteriormente mencionado pode ser repetido até que a marcha a mais baixa tenha sido selecionada e tentada para saída. Por conseqüência, a marcha de partida pode ser abaixada uma etapa de marcha de cada vez. Na Figura 3, a etapa (S31) e até a etapa (S39) corresponde para as etapas (S1) até (S9) na Figura 2. Uma diferença é a de que, na sequência da Figura 3, na etapa (S38) a marcha de partida de partida não a mais baixa possível é selecionada, mas ao invés disso, a próxima mais baixa marcha de partida. Na etapa (S310) na Figura 3, a unidade de controle é programada para detectar se a segunda marcha de partida também é excessivamente alta ou não. Se não, a tentativa de saída continua na etapa (S31) até ser completada; se sim, então a unidade de controle é programada para retornar para a etapa (S36) e interromper a tentativa de saída e se preparar para uma outra tentativa de saída com uma marcha de partida ainda mais baixa.
Em uma concretização adicional da presente invenção, a unidade de controle pode ser programada para interpretar quanto ruim a primeira tentativa de saída foi, e como um resultado disso selecionar uma adaptada segunda marcha de partida mais baixa. Por exemplo, se a primeira tentativa de saída é desempenhada com três marchas, a unidade de controle pode escolher entre duas marchas ou uma marcha anterior à segunda tentativa de saída. A escolha entre as marchas de partida mencionadas pode ser decidida pela unidade de controle sendo programada para novamente calcular energia de calor durante o deslizamento de embreagem e como informação adicional também registrar a velocidade rotacional de um eixo de entrada da caixa de marchas na transmissão. Desta maneira, a unidade de controle pode acessar quanto próxima de sucesso esta tentativa de saída foi. Se a velocidade rotacional do eixo de entrada foi relativamente baixa, então uma marcha (neste caso, a mesma marcha como a mais baixa possível) irá ser selecionada como a nova marcha de partida. Se a velocidade rotacional do eixo de entrada foi relativamente alta, então duas marchas irão ser selecionadas como a próxima marcha de partida.
Uma entrada adicional que pode ser considerada pela unidade de controle (7) em todas concretizações mencionadas da presente invenção pode ser a velocidade rotacional da unidade de propulsão, o que significa dizer, a velocidade rotacional decide qual saída de torque que é disponível a partir da unidade de propulsão de maneira a se ter capacidade de transmitir uma determinada quantidade de torque para as rodas de tração para se ter capacidade de alcançar uma saída de veículo bem sucedida.
Em uma concretização alternativa da presente invenção em concordância com a Figura 2, a etapa (S3) de detecção de que referida primeira saída de veículo não é possível com referida primeira marcha de partida pode ao invés disso ser detectada pelo motorista. Por consequência, se o motorista observa que a marcha de partida selecionada e engatada é excessivamente alta, o motorista pode interromper a tentativa de saída, por exemplo, por diretamente selecionar uma outra marcha de partida através de uma alavanca de mudança de marchas. o motorista pode escolher a marcha a mais baixa possível [correspondendo para etapa (S8)] ou exatamente selecionar uma marcha mais baixa do que a primeira marcha de partida [correspondendo para a etapa (S38)]. Esta interrupção manual, e seleção de marcha de partida, iniciam a unidade de controle (7) para automaticamente desempenhar etapas correspondendo para as etapas (S6) até (S10).
Em uma concretização adicional da presente invenção, é possível para o motorista mudar a marcha de partida selecionada antes que a tentativa de saída tenha sido iniciada, o que significa dizer, antes que o motorista venha a requisitar saída, por exemplo, por pressionamento do pedal de acelerador, uma tal concretização da presente invenção irá, por conseqiiência, sobre seleção manual de uma segunda marcha de partida mais baixa automaticamente iniciar a unidade de controle (7) para desempenhar etapas correspondendo para as etapas (S6) até (S10).
As mencionadas duas concretizações semiautomáticas iniciadas de motorista da presente invenção podem ser combinadas uma com a outra ou com as concretizações completamente automáticas anteriormente descritas da presente invenção para seleção de uma melhor marcha de partida.
Evidentemente podem existir concretizações da presente invenção onde um veículo somente possui funcionalidade em concordância com as concretizações completamente automáticas anteriormente descritas de seleção de uma melhor marcha de partida.
Em todas as concretizações anteriormente mencionadas, se a marcha a mais baixa não for possível para dar partida sem severo risco de desgaste de transmissão, a unidade de controle pode ser programada para alertar o motorista.
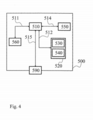
A Figura 4 mostra um aparelho (500) em concordância com uma concretização da presente invenção, compreendendo uma memória não volátil (520), um processador (510) e uma memória de leitura e escrita (560). A memória (520) possui uma primeira parte de memória (530), na qual um programa de computador para controle do aparelho (500) é armazenado. O programa de computador na parte de memória (530) para controle do aparelho (500) pode ser um sistema de operação. O aparelho (500) pode ser englobado, por exemplo, em uma unidade de controle, tal como a unidade de controle (7) . A unidade de processamento de dados (510) pode compreender, por exemplo, um microcomputador.
A memória não volátil (520) também possui uma segunda parte de memória (540), na qual um programa para controle do motor, da embreagem, da transmissão e do dispositivo de frenagem em concordância com a presente invenção, é armazenado. Em uma concretização alternativa da presente invenção, o programa com funções em concordância com a present:e invenção é armazenado em um meio (mídia) de armazenamento de dados nao volátil separado (550), tal como, por exemplo, um CD ou uma memória semicondutora intercambiável. O programa pode ser armazenado em uma forma executável ou em um estado comprimido.
Quando é estabelecido posteriormente que a unidade de processamento de dados (510) roda uma função específica, devería ser evidenciado que a unidade de processamento de dados (510) está rodando uma parte específica do programa armazenado na memória (540) ou uma parte específica do programa armazenado no meio (mídia) de armazenamento de dados não volátil (550).
A unidade de processamento de dados (510) é delineada para comunicação com a memória (550) através de um ônibus (bus) de dados (514) . A unidade de processamento de dados (510) é também delineada para comunicação com a memória (520) através de um ônibus de dados (512). Em adição, a unidade de processamento de dados (510) é delineada para comunicação com a memória (560) através de um ônibus de dados (511). A unidade de processamento de dados (510) é também delineada para comunicação com um portal de dados (590) pela utilização de um ônibus de dados (515).
O método em concordância com a presente invenção pode ser executado pela unidade de processamento de dados (510), pela unidade de processamento de dados (510) rodando o programa armazenado na memória (540) ou o programa armazenado no meio (mídia) de armazenamento não volátil (550).
A presente invenção não deveria ser considerada como sendo limitada para as concretizações descritas anteriormente, e deverá ser observado por aqueles especializados no estado da técnica que, mais preferivelmente um número de variações e de modificações é conceptível dentro do escopo de proteção e conceito inventivo da presente invenção como estabelecidos pelas reivindicações de patente posteriormente.
Claims (7)
- Um método para seleção automática ou semiautomática de uma melhor marcha de partida em um veículo, caracterizado pelo fato de que compreende as seguintes etapas executadas na ordem mencionada:
- - seleção e engate de uma primeira marcha de partida de veículo no veículo parado (S2, S32);
- - sobre demanda de motorista controle de torque de propulsão de veículo por engate gradualmente de uma unidade de propulsão para rodas de tração do veículo de maneira a tentar conseguir uma primeira saída de veículo (S3, S33) ;
- - detecção de se referida primeira marcha de partida de veículo é excessivamente alta para uma condição prevalecente da primeira saída de veículo (S4, S34) ;
- - se a primeira marcha de partida de veículo é excessivamente alta então interrupção da primeira saída de veículo e automaticamente frenagem do veículo (S6, S36);
- - desengate de referida primeira marcha de partida de veículo (S7, S37);
- - seleção e engate de uma adaptada segunda marcha de partida que é uma marcha mais baixa comparada com referida primeira marcha de partida e que possui uma relação de marcha mais alta (S8, S38);
- - controle de torque de propulsão de veículo por engate gradualmente de referida unidade de propulsão para referidas rodas de tração de maneira a tentar conseguir uma segunda saída de veículo; e
- - se referida segunda tentativa de saída de veículo resulta em uma transmissão de torque para de tração do veículo sendo suficiente de maneira a desempenhar uma saída então parar frenagem do veículo (S9, S39).
- O método de acordo com a reivindicação 1, caracterizado pelo fato de que a etapa de detecção é feita por cálculo de energia de calor desenvolvida na embreagem durante a primeira tentativa de saída de veículo e interrupção de referida primeira tentativa de saída de veículo se referida energia de calor excede um limite de energia de calor pré-determinado.
- O método de acordo com a reivindicação 1, caracterizado pelo fato de que a etapa de detecção é feita pelo motorista e de que a etapa subseqüente de interrupção da primeira saída de veículo é desempenhada manualmente pelo motorista.
- O método de acordo com a reivindicação 3, caracterizado pelo fato de que a etapa de interrupção da primeira saída de veículo é desempenhada pelo motorista manualmente selecionando uma marcha mais baixa.
- O método de acordo com qualquer uma das reivindicações precedentes, caracterizado pelo fato de que se referida segunda tentativa de saída resulta em transmissão de torque para as rodas de tração suficiente para manter o veículo pelo menos em parada, então continua controle de engate de embreagem de uma embreagem até que a embreagem seja completamente engatada e o veículo sai (S10, S310).
- Um veículo compreendendo uma unidade de propulsão (2) de maneira tracionada conectada para uma transmissão automática de mudança de marcha em estágio (3, 4), que é de maneira tracionada conectada para rodas de tração (5) do veículo, um dispositivo de frenagem (6) disposto para ser possibilitado parar o veículo, pelo menos uma unidade de controle (7) disposta para controlar referida unidade de propulsão, referida transmissão automática e referido dispositivo de frenagem em dependência de diferentes sinais de entrada, caracterizado pelo fato de que referida unidade de controle (7) é disposta para executar as seguintes etapas na ordem mencionada:
- - seleção e engate de uma primeira marcha de partida de veículo no veículo parado e quando referida transmissão é desengatada a partir de referida unidade de propulsão (S2, S32) ;
- - sobre demanda de motorista controle de torque de propulsão de veículo produzido por referida unidade de propulsão e engate de referida transmissão para referida unidade propulsão por engate gradualmente de referida unidade de propulsão para rodas de tração de maneira a tentar conseguir uma primeira saída de veículo (S3, S33);
- - detecção de se referida primeira marcha de partida de veículo é excessivamente alta para uma condição prevalecente da primeira saída de veículo (S4, S34) ;
- - se a primeira marcha de partida de veículo é excessivamente alta então interrupção da primeira saída de veículo e frenagem automaticamente do veículo por ativação de referido dispositivo de frenagem (S6, S36);
- - desengate de referida primeira marcha de partida de veículo (S7, S37);
- - seleção e engate de uma adaptada segunda marcha de partida que é uma marcha mais baixa comparada com referida primeira marcha de partida e que possui uma relação de marcha mais alta (S8, S38);
- - controle de torque de propulsão de veículo produzido por referida unidade de propulsão e engate de referida transmissão por engate gradualmente de referida unidade de propulsão para referidas rodas de tração de maneira a tentar conseguir uma segunda saída de veículo;
- - se referida segunda tentativa de saída de veículo resulta em uma transmissão de torque para rodas de tração suficiente para desempenhar uma saída então desativar referido dispositivo de frenagem (S9, S39).
- Memória legível por computador, caracterizada pelo fato de que possui instruções nela armazenadas que, quando executadas, fazem com que um computador e/ou processador realize o método como definido em qualquer uma das reivindicações 1 a 5.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/SE2008/000165 WO2009108087A1 (en) | 2008-02-28 | 2008-02-28 | A method and device for automatic or semiautomatic selection of a better starting gear in a vehicle |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| BRPI0822301A2 BRPI0822301A2 (pt) | 2020-08-11 |
| BRPI0822301B1 true BRPI0822301B1 (pt) | 2021-02-17 |
Family
ID=41016319
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| BRPI0822301-7A BRPI0822301B1 (pt) | 2008-02-28 | 2008-02-28 | um método e um dispositivo para seleção automática ou semiautomática de uma melhor marcha de partida em um veículo |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8401750B2 (pt) |
| EP (1) | EP2257722B1 (pt) |
| JP (1) | JP5254366B2 (pt) |
| CN (1) | CN101952621B (pt) |
| BR (1) | BRPI0822301B1 (pt) |
| WO (1) | WO2009108087A1 (pt) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102132075B (zh) * | 2008-08-28 | 2014-10-29 | 沃尔沃拉斯特瓦格纳公司 | 用于选择车辆中的起动档位的方法和车辆传动装置 |
| SE534650C2 (sv) * | 2010-02-01 | 2011-11-08 | Scania Cv Ab | Förfarande och system för styrning av en växellåda |
| DE102010028282A1 (de) * | 2010-04-28 | 2011-12-01 | Zf Friedrichshafen Ag | Verfahren zur Bestimmung eines Anfahrgangs bei einem Kraftfahrzeug |
| CN103121450B (zh) * | 2011-11-18 | 2016-08-24 | 北汽福田汽车股份有限公司 | 一种纯电动汽车的坡道控制方法 |
| CN103386967B (zh) * | 2012-05-08 | 2016-01-13 | 上海捷能汽车技术有限公司 | 用于自动变速器的控制方法及动力系统 |
| BR112016007333B1 (pt) | 2013-10-02 | 2021-02-17 | Volvo Truck Corporation | método e disposição para adaptação da marcha de partida de um veículo, e veículo que compreende tal disposição |
| DE102015005850A1 (de) * | 2015-05-06 | 2016-11-10 | GM Global Technology Operations LLC (n. d. Ges. d. Staates Delaware) | Verfahren zum Betreiben eines Kraftfahrzeugs |
| SE540141C2 (sv) | 2016-03-23 | 2018-04-10 | Scania Cv Ab | Förfarande för att styra en hybriddrivlina, en hybriddrivlina och ett fordon, innefattande en sådan hybriddrivlina |
| EP3455322B1 (en) | 2016-05-09 | 2021-03-03 | 3M Innovative Properties Company | Hydrofluoroolefins and methods of using same |
| EP3487737B1 (en) | 2016-07-19 | 2020-05-06 | Volvo Truck Corporation | A method and arrangement for determining road inclination |
| CN106882180B (zh) * | 2017-01-09 | 2019-02-12 | 北京理工大学 | 一种无人驾驶履带车的起步控制方法 |
| WO2019218123A1 (zh) * | 2018-05-14 | 2019-11-21 | 舍弗勒技术股份两合公司 | 自动变速器的换挡控制方法、自动变速器的换挡控制装置、自动变速器及车辆用动力系统 |
| CN110553031A (zh) * | 2019-09-27 | 2019-12-10 | 南京汽车集团有限公司 | 一种轻卡amt自动变速器起步档位选择及控制方法 |
| CN112728069B (zh) * | 2020-12-25 | 2022-07-08 | 采埃孚商用车系统(青岛)有限公司 | 一种选择合适起步档的方法及系统 |
| CN114475277A (zh) * | 2022-03-11 | 2022-05-13 | 东风汽车集团股份有限公司 | 一种行车自动变档与经济时速的分析方法 |
| CN116572959A (zh) * | 2023-06-19 | 2023-08-11 | 一汽解放汽车有限公司 | 一种车辆起步方法、装置、电子设备和存储介质 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS636259A (ja) * | 1986-06-26 | 1988-01-12 | Isuzu Motors Ltd | 電子制御自動変速機 |
| JPS6343829A (ja) * | 1986-08-12 | 1988-02-24 | Isuzu Motors Ltd | 電子制御自動変速機の発進ギヤ切換装置 |
| GB9218274D0 (en) | 1992-08-27 | 1992-10-14 | Eaton Corp | Start ratio selection control system and method |
| DE19602006A1 (de) | 1995-01-28 | 1996-08-01 | Luk Getriebe Systeme Gmbh | Vorrichtung und ein Verfahren zur Ansteuerung eines Drehmomentübertragungssystems |
| CN1215670A (zh) | 1997-02-01 | 1999-05-05 | 易通公司 | 汽车自动变速器起动比的选择 |
| DE19839837A1 (de) | 1998-09-02 | 2000-03-09 | Zahnradfabrik Friedrichshafen | Verfahren zur Ermittlung einer Anfahr-Gangstufe |
| US6394931B1 (en) * | 1999-07-19 | 2002-05-28 | Eaton Corporation | Starting and driveline shock protection control method and system |
| GB0018184D0 (en) * | 2000-07-26 | 2000-09-13 | Eaton Corp | Automatic selection of start gear |
| SE524510C2 (sv) | 2002-12-30 | 2004-08-17 | Volvo Lastvagnar Ab | Metod och anordning för start i uppförsbacke |
| JP2005048893A (ja) * | 2003-07-30 | 2005-02-24 | Nissan Diesel Motor Co Ltd | クラッチ制御装置 |
| DE102004023581A1 (de) | 2004-05-13 | 2005-12-08 | Adam Opel Ag | Verfahren zur Steuerung einer Kupplung und/oder eines Kraftfahrzeuggetriebes |
| JP2006001338A (ja) * | 2004-06-16 | 2006-01-05 | Hitachi Ltd | 自動クラッチを備えた車両の制御装置,制御方法および車両 |
| DE102005029566A1 (de) | 2004-06-30 | 2006-02-02 | Luk Lamellen Und Kupplungsbau Beteiligungs Kg | Verfahren zum Schutz einer automatisiert betätigten Kupplung eines Fahrzeus gegen Überlastung |
| JP4237126B2 (ja) | 2004-10-12 | 2009-03-11 | 本田技研工業株式会社 | 車両用油圧作動式自動変速機の制御装置 |
| ES2384053T3 (es) | 2005-09-08 | 2012-06-28 | Volvo Lastvagnar Ab | Procedimiento para la adaptación de la selección de velocidades en un vehículo |
| JP2007132364A (ja) | 2005-11-08 | 2007-05-31 | Hino Motors Ltd | 発進ギヤの選択警報装置 |
-
2008
- 2008-02-28 CN CN200880127347.5A patent/CN101952621B/zh active Active
- 2008-02-28 JP JP2010548637A patent/JP5254366B2/ja active Active
- 2008-02-28 WO PCT/SE2008/000165 patent/WO2009108087A1/en not_active Ceased
- 2008-02-28 BR BRPI0822301-7A patent/BRPI0822301B1/pt active IP Right Grant
- 2008-02-28 EP EP08712749.4A patent/EP2257722B1/en not_active Revoked
- 2008-02-28 US US12/919,824 patent/US8401750B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP2257722B1 (en) | 2019-01-02 |
| JP5254366B2 (ja) | 2013-08-07 |
| US20110010060A1 (en) | 2011-01-13 |
| EP2257722A1 (en) | 2010-12-08 |
| BRPI0822301A2 (pt) | 2020-08-11 |
| WO2009108087A1 (en) | 2009-09-03 |
| EP2257722A4 (en) | 2018-04-18 |
| US8401750B2 (en) | 2013-03-19 |
| CN101952621B (zh) | 2014-05-07 |
| CN101952621A (zh) | 2011-01-19 |
| JP2011518064A (ja) | 2011-06-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| BRPI0822301B1 (pt) | um método e um dispositivo para seleção automática ou semiautomática de uma melhor marcha de partida em um veículo | |
| US8498795B2 (en) | Method and system for controlling a vehicle cruise control | |
| BRPI0721579A2 (pt) | mÉtodo para aumento de tempo de duraÇço ativa de uma funÇço de roda livre automÁtica em um veÍculo | |
| JP5538216B2 (ja) | 坂道運転支援方法 | |
| JP5139316B2 (ja) | 急勾配な上り坂の走行状態における車両の走行中のギアの選択方法 | |
| CN103380037B (zh) | 混合动力车辆的变速控制装置 | |
| SE524510C2 (sv) | Metod och anordning för start i uppförsbacke | |
| KR102598558B1 (ko) | 하이브리드 차량의 파워-오프 다운시프트를 위한 능동 변속 제어 방법 | |
| JPH02168066A (ja) | 車両用自動変速装置 | |
| KR20100046280A (ko) | 자동차에 탑재된 자동 주차 브레이크 장치의 해제를 제어하기 위한 시스템 및 방법 | |
| JP2010043649A (ja) | エンジンの燃料供給を制御するためのシステム | |
| JP2004504574A (ja) | 始動ギアの自動選択 | |
| BRPI0801978B1 (pt) | método e sistema para controlar um veículo dotado de um câmbio de marchas com atuação servo mecânica | |
| KR20100057786A (ko) | 자동차의 경사면 운전 보조 장치에서의 데이터 처리 방법 | |
| BRPI0823170B1 (pt) | Método e sistema para controle de um trem de tração de veículo | |
| BRPI0722257B1 (pt) | Método para uma utilização de um motor de combustão em um veículo | |
| BRPI0620903A2 (pt) | um método para controle de desengate de uma embreagem automatizada em um veìculo | |
| RU2490531C2 (ru) | Способ и устройство выбора передачи для трогания с места транспортного средства | |
| BRPI0721378B1 (pt) | um método para operação de uma transmissão automática ou semi-automática de um veículo pesado quando em modo de tração sem carga | |
| KR20180067838A (ko) | 하이브리드 차량의 제어 방법 | |
| CN108027050A (zh) | 车辆动力总成和用于升档的方法 | |
| KR102859895B1 (ko) | 전기 모터를 구비한 자동차 및 그를 위한 주차 제어 방법 | |
| KR102928826B1 (ko) | 전기 모터를 구비한 자동차 및 그를 위한 파킹 기어 해제 방법 | |
| JP6443277B2 (ja) | 自動変速機制御装置 | |
| RU2462634C2 (ru) | Способ и устройство автоматического или полуавтоматического выбора оптимальной передачи для трогания с места транспортного средства |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| B06U | Preliminary requirement: requests with searches performed by other patent offices: procedure suspended [chapter 6.21 patent gazette] | ||
| B09A | Decision: intention to grant [chapter 9.1 patent gazette] | ||
| B16A | Patent or certificate of addition of invention granted [chapter 16.1 patent gazette] |
Free format text: PRAZO DE VALIDADE: 10 (DEZ) ANOS CONTADOS A PARTIR DE 17/02/2021, OBSERVADAS AS CONDICOES LEGAIS. |