Reivindicação de Prioridade
O presente pedido reivindica a prioridade do pedido provisório dos Estados Unidos de n° de série 61/111.825, depositado no dia 6 de novembro de 2008, intitulado “One Way Sliding Device for Intramedullary Intertrochanteric Fixation Implants”, cuja revelação encontra-se anexada na íntegra ao presente documento para fins de referência.
Campo da Invenção
A presente invenção refere-se a dispositivos para tratar de fraturas de ossos longos e, em especial, a dispositivos de fixação internos.
Antecedentes da Invenção
As fraturas no fêmur ocorrem com frequência, por exemplo, nas regiões intertrocantéricas e peritrocantéricas e no espaço femoral. Essas fraturas podem ser fixadas por meio de um dispositivo intramedular e um implante. Como é de conhecimento dos versados na técnica, o dispositivo intramedular (por exemplo, um pino intramedular) é inserido no canal medular de um osso longo, como o fêmur. Um implante, que pode ser um lâmina helicoidal ou um tira-fimdo, pode então ser inserido lateralmente no osso para atravessar uma abertura do dispositivo X. intramedular até que uma extremidade livre do implante penetre na cabeça do osso. Por exemplo, se o osso for o fêmur, o implante atravessa o eixo do fêmur, o dispositivo intramedular e penetra na cabeça femoral por meio do pescoço do fêmur para fixar a cabeça femoral ao resto do fêmur. Após o implante, esse implante pode se mover lateralmente em relação ao pino intramedular ao longo da via pela qual foi inserido. Espera-se certo movimento lateral do implante. No entanto, em alguns casos, o implante pode migrar medianamente através do dispositivo intramedular, resultando em uma protuberância que atravessa a cabeça femoral e penetra no acetábulo, causando complicações.
Sumário da Invenção
A presente invenção refere-se a um dispositivo para tratar de fraturas compreendendo um membro intramedular de tamanho e dimensão propícios à introdução em um canal medular ao longo do eixo longitudinal de um osso, o membro intramedular incluindo uma abertura que se estende obliquamente através dele, a abertura, quando o membro intramedular encontra- se na posição desejada dentro do osso, alinhando-se a um"eixo desejado ao longo do qual um implante será inserido no osso, o membro intramedular incluindo um canal formado dentro dele que culmina na abertura e um mecanismo de travamento disposto dentro do canal, o mecanismo de travamento incluindo uma estrutura de travamento adjacente que se estende para dentro da abertura junto com um implante dimensionado para ser recebido de maneira corrediça através da abertura e inserido ao longo do eixo desejado, o implante incluindo várias estruturas de contato adjacentes alinhadas para se engatar à estrutura de contato do mecanismo de travamento, impedindo assim movimentos medianos do implante em relação ao membro intramedular.
A presente invenção também se refere a um método compreendendo: inserir um membro intramedular no canal medular de um osso; inserir um implante no osso através de uma abertura no membro intramedular, um eixo do implante incluindo várias estruturas de contato distribuídas ao longo de parte de sua extensão, cada uma das estruturas de contato incluindo uma superfície lateral inclinada e uma superfície de contato voltada para o meio; e mover um mecanismo de travamento a uma configuração travada, em que uma lingueta do mecanismo de travamento estende-se para dentro da abertura para engatar-se à superfície de contato de uma das estruturas de contato correspondentes à posição mediada máxima desejada do implante, as superfícies laterais inclinadas das estruturas de contato permitindo o movimento lateral do implante em relação à lingueta.
Breve Descrição dos Desenhos
A Fig. 1 ilustra uma vista lateral de" um dispositivo de acordo com uma primeira concretização exemplificativa da invenção; a Fig. 2 ilustra uma vista lateral de uma superfície distal de um implante do dispositivo da Fig. 1; a Fig. 3a ilustra uma vista em perspectiva de um mecanismo de travamento do dispositivo da Fig. 1. a Fig- 3b ilustra uma vista em perspectiva de um mecanismo de travamento e um dispositivo intramedular de acordo com uma concretização alternativa da presente invenção; a Fig- 3 c ilustra uma vista em perspectiva do mecanismo de travamento da Fig 3b; a Fig- 4 ilustra uma vista lateral de um pino intramedular e do mecanismo de travamento do dispositivo da Fig. 1 em uma primeira configuração; a Fig- 5 ilustra uma vista em perspectiva do pino intramedular e do mecanismo de travamento da Fig. 4; a Fig. 6 ilustra uma vista lateral do pino intramedular e do mecanismo de travamento do dispositivo da Fig. 1 em uma segunda configuração; a Fig- 7 ilustra uma vista em perspectiva do pino intramedular e do mecanismo de travamento da Fig. 6; a Fig- 8 ilustra uma vista em perspectiva do dispositivo da Fig. 1; a Fig- 9 ilustra uma vista lateral do dispositivo da Fig. 1; a Fig- 10 ilustra uma vista lateral oposta à da Fig. 9; a Fig- H ilustra uma seção transversal do dispositivo da Fig. 1; a Fig- 12 ilustra uma vista lateral de um dispositivo de acordo com uma segunda concretização exemplificativa da presente invenção; a fig. 13 ilustra uma vista em seção transversal de um implante do dispositivo da Fig. 12; a Fig- 14 ilustra uma vista em perspectiva de um mecanismo de travamento do dispositivo da Fig. 12; X. a Fig- 15 ilustra uma vista em perspectiva de um pino intramedular e do mecanismo de travamento do dispositivo da Fig. 12 em uma primeira configuração; a Fig- 16 ilustra outra vista em perspectiva do pino intramedular e do mecanismo de travamento da Fig. 15; a Fig- 17 ilustra uma vista lateral do pino intramedular e do mecanismo de travamento do dispositivo da Fig. 12 em uma segunda configuração; a Fig- 18 ilustra uma vista em perspectiva do pino intramedular e do mecanismo de travamento da Fig. 17; a Fig- 19 ilustra uma vista em perspectiva de um dispositivo de acordo com uma terceira concretização exemplificativa da presente invenção; a Fig- 20 ilustra outra vista em perspectiva do dispositivo da Fig. 19; a Fig- 21 ilustra uma vista em perspectiva de um mecanismo de travamento do dispositivo da Fig. 19; a Fig- 22 ilustra um lado do mecanismo de travamento da Fig. 21; a Fig- 23 ilustra uma vista em perspectiva de um primeiro elemento do mecanismo de travamento da Fig. 21; a pig. 24 ilustra outra vista em perspectiva do primeiro elemento da Fig- 23; a fig. 25 ilustra uma vista em perspectiva de um segundo elemento do mecanismo de travamento da Fig. 21; a fig. 26 ilustra outra vista em perspectiva do segundo elemento da Fig- 25; a Fig- 27 ilustra uma seção transversal lateral de um pino intramedular e mecanismo de travamento do dispositivo da Fig. 19; a fig. 28 ilustra uma vista lateral de um dispositivo de acordo com uma quarta concretização exemplificativa da presente invenção; a fig. 29 ilustra uma vista lateral do pino intramedular, do mecanismo de travamento e da lingueta do dispositivo da Fig. 28 em uma primeira configuração; a Fig- 30 ilustra uma vista em perspectiva do X. pino intramedular, do mecanismo de travamento e da lingueta da Fig- 29; a Fig- 31 ilustra uma vista lateral do pino intramedular, do mecanismo de travamento e da lingueta do dispositivo da Fig. 28 em uma segunda configuração; a Fig- 32 ilustra uma vista em perspectiva do pino intramedular, do mecanismo de travamento e da lingueta da Fig. 31; a Fig. 33 ilustra uma vista anterior do mecanismo de travamento do dispositivo da Fig. 28; a Fig- ^4 ilustra uma vista em perspectiva da lingueta do dispositivo da Fig. 28; a Fig- 35 ilustra uma vista lateral de um dispositivo de acordo com uma quinta concretização exemplificativa da presente invenção; a Fig- 36 ilustra uma vista lateral de um implante do dispositivo da Fig. 35; a Fig- 37 ilustra uma vista lateral de um mecanismo de travamento do dispositivo da Fig. 35; a Fig- 38 ilustra uma vista lateral em corte transversal do mecanismo de travamento da Fig. 37; a Fig- 39 ilustra uma vista em perspectiva do dispositivo da Fig. 35 em uma posição implantada inicial; a Fig. 40 ilustra uma vista em perspectiva do dispositivo da Fig. 35 em uma posição implantada final; e a Fig. 41 ilustra uma vista em perspectiva de uma placa chanfrada do mecanismo de travamento da Fig. 37.
Descrição Detalhada
É possível entender melhor a presente invenção pela leitura da descrição a seguir com referência aos desenhos anexos, nos quais elementos iguais são indicados por números de referência iguais. A presente invenção refere-se a dispositivos para tratar de fraturas em ossos longos e, em especial, a dispositivos de fixação internos. Vale frisar que, embora descrevamos concretizações exemplificativas da presente invenção abaixo no que diz respeito ao tratamento de fraturas no fêmur, sua aplicação não se limita a essas fraturas e também pode ocorrer no tratamento de outras fraturas como, por exemplo, no úmero, na tíbia etc. Também vale frisar que os termos distai e proximal, usados no presente documento, referem-se aos sentidos para perto (proximal) e para longe (distal) do usuário do dispositivo. Conforme indicado, fraturas de ossos longos, em especial fraturas em que há uma ruptura entre uma cabeça trocantérica e um eixo do osso, podem ser tratadas implantando- se um dispositivo intramedular ao longo de um eixo do osso (isto é, no canal medular). É possível inserir um implante lateralmente no osso para atravessar o dispositivo intramedular e penetràr na cabeça trocantérica. Dispositivos de acordo com a presente invenção são projetados para permitir um grau desejado de migração do implante para trás rumo ao ponto através do qual foi inserido no osso (isto é, a migração lateral) ao mesmo tempo em que minimizam a migração do implante mais para dentro da cabeça trocantérica rumo ao acetábulo (isto é, a migração mediana).
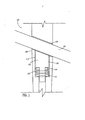
Conforme ilustram as Figs, de 1 a 11, de acordo com uma concretização exemplificativa da presente invenção, um X. dispositivo 100 compreende um implante 102 e um pino intramedular 104 que inclui um mecanismo de travamento 106 (por exemplo, um mecanismo de catraca) que permite a migração lateral limitada do implante 102 através do pino 104 ao mesmo tempo em que impede sua migração mediana. Conforme ilustra a Fig. 1, uma abertura oblíqua 108 atravessa o pino 104 em um plano substancialmente perpendicular ao seu eixo longitudinal. A abertura 108 é dimensionada para receber o implante 102 através dela. Um canal 110 que atravessa parte do pino 104 ao longo do eixo longitudinal e culmina na abertura 108 aloja um mecanismo de travamento 106. Na concretização ilustrada, o canal 110 e o mecanismo de travamento 106 estendem-se distalmente em relação à abertura 108 de modo que o mecanismo de travamento 106 engate-se ao lado distal do implante 102 quando este atravessar a abertura oblíqua 108. Os versados na técnica perceberão que, como alternativa, o canal 110 e o mecanismo de travamento 106 podem ser dispostos do lado proximal do implante 102. O mecanismo de travamento 106 inclui um membro de propensão 140 (por exemplo, uma mola) que se engata a um membro com lingueta 105 de modo a forçá-lo a fazer contato com o implante 102.
Conforme ilustra a Fig. 2, uma superfície distai uma parte de engate para travamento do implante 102, que, quando na configuração desejada, sobrepõe o canal 110, inclui traços para se engatar a estruturas correspondentes do membro com lingueta 105. Mais especificamente, o implante 102 compreende uma haste 112 que se estende de uma extremidade proximal 114 a uma extremidade distai (não-ilustrada) acoplada à extremidade proximal de uma lâmina ou outra estrutura de engate com o osso (não-ilustrada). Como os versados na técnica perceberão, a estrutura para engate com o osso pode ter a forma de uma pá helicoidal que se estende distalmente a partir da extremidade distal da haste 112. Os versados na técnica perceberão, contudo, que a estrutura de engate com o osso pode ser qualquer outro meio de fixação, como, por exemplo, um tira- fiindo.
A parte de engate para travamento da haste 112 inclui várias estruturas de contato 116 espaçadas umas das outras ao longo de parte do comprimento da haste 112. Cada uma das estruturas de contato 116 inclui uma superfície inclinada 117 que se estende de uma posição adjacente a uma extremidade radialmente interna da estrutura de contato 116 imediatamente distai a ela e inclina-se aos poucos para fora rumo a uma superfície de contato 119. Como os versados na técnica perceberão, as superfícies de contato 119 das estruturas de contato 116 podem se estender substancialmente em perpendicular ao eixo longitudinal do implante 102.
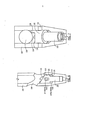
Conforme ilustra a Fig. 3 a, o membro com lingueta 105 inclui uma superfície de engate com o implante 130 inclinada para se alinhar substancialmente ao ângulo da abertura 108. Uma lingueta 126, incluindo uma superfície de contato proximal 127, projeta-se além da superfície 130 de modo que, quando na posição operacional, a superfície de contato 127 da lingueta 126 engate-se a uma superfície de contato 119 de uma das estruturas de contato 116 do implante 102. Dessa forma, o contrato entre a lingueta 126 e a estrutura de contato 116 da haste 112 impede que o implante 102 mova-se medianamentè em relação ao pino 104. Todavia, o implante 102 pode correr lateralmente já que a superfície distai inclinada da lingueta 126 e as superfícies inclinadas 117 das estruturas de contato 116 permitem que a haste 112 corra lateralmente sobre o membro com lingueta 105. Uma protuberância 128, incluindo uma superfície inclinada 134, projeta-se para fora da superfície de engate com o implante 130 por uma distância maior do que a lingueta 126, de modo que, durante a introdução do implante 102 através da abertura 108, o contato entre a haste 112 e a protuberância 128 afaste a parte de engate para travamento da haste 112 da lingueta 126 até que o implante 102 avance até a posição desejada no osso. Quando na posição desejada, giramos o implante 102 em tomo de seu eixo longitudinal até uma orientação de travamento em que a protuberância 128 alinhe-se à ranhura 118 formada na haste 112 e penetre nela. Nesse momento, as estruturas de contato 116 da haste 112 e a lingueta 126 alinhar-se-ão de modo que, quando o implante 102 se aproximar do membro com lingueta 105 devido à introdução da protuberância 128 na ranhura 118, a lingueta 126 engate-se a uma das estruturas de contato 116 correspondente à posição mediana máxima desejada do implante 102. Conforme descrito acima, o engate entre a superfície de contato 127 da lingueta 126 e a superfície de contato 119 da estrutura de contato 116 impede uma migração mediana mais além por parte do implante 102. Esse contato entre a lingueta 126 e a estrutura de contato correspondente 116 é mantido pelo membro de propensão 140 que força o tempo todo o membro com lingueta 105 rumo à haste 112.
Para garantir que o mecanismo de travamento 106 não se mova além configurações primeira e segunda, ele também pode incluir um orifício alongado 124 que o atravesse lateralmente e distalmente o ombro 122 para receber um pino (não-ilustrado) que o fixe ao pino intramedular 104. Sendo assim, o pino intramedular 104 também inclui um orifício 136 que o atravessa lateralmente e distalmente em relação à abertura oblíqua 108 de modo que sua corresponda à posição do orifício alongado 124. O orifício 136 pode ser substancialmente circular de modo X. que o pino intramedular 104 permaneça parado enquanto o mecanismo de travamento 106 se move em relação a ele ao longo do eixo longitudinal. Os versados na técnica perceberão que o pino inserido nos orifícios 124 e 136 fixa o mecanismo de travamento 106 no pino intramedular 104 de modo que eles não girem em relação um ao outro, mas movam-se entre as configurações primeira e segunda ao longo do eixo longitudinal do pino intramedular 104.
Em uma concretização alternativa, conforme ilustram as Figs. 3b e 3c, um mecanismo de travamento 106’ inclui um membro com lingueta 105’ com um recesso 124’, em vez de um orifício alongado, para fixar o mecanismo de travamento 106’ dentro do pino intramedular 104’. O recesso 124’ pode ser fixado dentro do pino intramedular 104’ por meio de um pino 137’ inserido no pino intramedular 104’ e no recesso 124’. O mecanismo de travamento 106’ é substancialmente semelhante ao mecanismo de travamento 106 e pode ser usado no dispositivo 100 substancialmente da mesma maneira. O recesso 124’ pode ser formado em uma superfície externa 125’’ do membro com lingueta 105’ e pode incluir uma primeira parte 142’, uma segunda parte 144’ e uma terceira parte 146’. A primeira parte 142’ estende-se na longitudinal ao longo de uma parte da superfície externa 125’ que vai de uma borda 156’ do membro com lingueta 105’ a uma extremidade proximal 148’ da primeira parte 142’. A segunda parte 144’ estende-se substancialmente na horizontal ao longo de uma parte da superfície externa 125’ que vai da extremidade proximal 148’ da primeira parte 142’ a uma extremidade oposta 150’. A terceira parte 146’ estende-se a partir da extremidade 150’ na longitudinal ao longo da superfície externa 125’ em um sentido distal. As partes primeira 142’, segunda 144’ e terceira 146’ se ligam de modo a formar um único recesso contínuo 124’.
O pino intramedular 104’ inclui um orifício 136’ que atravessa lateralmente um lado dele distalmente em relação à abertura oblíqua 108’ de modo que o posicionamento do orifício 136’ corresponda à posição do recesso 124’. O orifício 136’ é adaptado e configurado para receber o pino 137’ através dele. O comprimento do pino 137’ pode ser um pouco maior do X. que a espessura do pino intramedular 104’. A espessura é determinada pela distância da superfície externa 109’ do pino intramedular 104’ ao canal 110’ que o atravessa longitudinalmente. Sendo assim, ao inserir o pino 137’ no orifício 136’ de modo que a extremidade proximal 152’ do pino 137’ fique no mesmo nível que a superfície externa 109’, uma extremidade distal do pino 137’ estende-se dentro do canal 110’ para se engatar ao recesso 124’. O orifício 136’ pode ser substancialmente circular de modo que o pino intramedular J 04’ permaneça substancialmente parado enquanto o mecanismo de travamento 106’ move-se em relação a ele ao longo do eixo longitudinal.
Para fixar o mecanismo de travamento 106’ dentro do pino intramedular 104’, um membro de propensão 140’ do mecanismo de travamento 106’ pode ser introduzido no canal 110’ junto com o membro com lingueta 105’ a fim de forçá-lo a fazer contato com o implante (não-ilustrado) inserido na abertura 108’. O membro com lingueta 105’ penetra distalmente no canal 110’ até que a extremidade distai 154’ do pino 137’ inserido no orifício 136’ engate-se à primeira parte 142’ do recesso 124’ por meio da borda 156’ da primeira parte 142’. O membro com lingueta 105’ é pressionado ainda mais distalmente contra o ímpeto do membro de propensão 140’ de modo que a primeira parte 142’ corra ao longo do pino 137’ até que sua extremidade proximal 148’ faça contato com ele. Em seguida, giramos o membro com lingueta 105’ em tomo de seu eixo longitudinal de modo que a segunda parte 144’ corra ao longo dele até que ele faça contato com a extremidade oposta 150’ da segunda parte 144’. Ao chegar à extremidade oposta 150’, soltamos o membro com lingueta 105’, fazendo com que o membro de propensão 140’ force o membro com lingueta 105’ no sentido proximal de modo que a terceira parte 146’ corra ao longo do pino 137’ até que ele engate-se à sua extremidade distai 158’. Os versados na técnica perceberão que, dessa forma, assim que fixarmos o mecanismo de travamento 106’ dentro do pino intramedular 104’, ele se moverá ao longo do eixo longitudinal para se engatar ao implante, conforme descrito em relação ao dispositivo 100. O movimento longitudinal do mecanismo de travamento 106’ resulta no deslizamento da terceira parte 146’ longitudinalmente ao longo da extremidade distai 154’ do pino 137’.
Em uma primeira configuração, ilustrada nas Figs. 4 e 5, quando nenhum implante 102 se faz presente na abertura 108, a superfície de engate com o implante 130 alinha-se substancialmente a uma parede da abertura oblíqua 108, ao passo que a lingueta 126 e a protuberância 128 estendem-se dentro da abertura oblíqua 108. Em seguida, à medida que o implante 102 penetra na abertura 108, o contato entre ele e a superfície inclinada 134 força o membro com lingueta 105 dentro do canal 110 a uma segunda configuração em que a protuberância 128 entra no canal 110 rumo a uma segunda configuração ilustrada nas Figs. 6 e 7 para permitir que o implante 102 avance medianamente através da abertura 108. O membro com lingueta 105 é preso de modo a não se mover mais para dentro da abertura 108 do que o desejado (isto é, além de uma primeira configuração desejada) por um pino 135 que atravessa uma abertura 136 dentro do pino intramedular 104 e uma abertura alongada 124 dentro do membro com lingueta 105. Conforme descrito acima, ao inserir implante 102 em uma posição desejada no osso, giramo-no em tomo de seu eixo até que a ranhura 118 alinhe-se à protuberância 128. Nesse momento, o membro de propensão 140 move o membro com lingueta 105 de volta à primeira configuração, fazendo com que a protuberância 128 penetre na ranhura 118 e a lingueta 126 engate-se a uma das estruturas de contato 116 do implante 102 correspondente à introdução máxima desejada do implante 102 no osso. Depois disso, quando da aplicação de forças ao implante 102 (por exemplo, quando se coloca peso sobre o osso), ele se move lateralmente, pois as superfícies inclinadas 117 deslizam sobre a lingueta 126. A superfície de contato 119 engata-se à lingueta 126, impedindo novo movimento mediano. Além disso, sempre que uma superfície de contato 119 se move lateralmente além da lingueta 126, é defina uma nova posição mediana máxima para o implante 102.
O pino intramedular 104 pode incluir ainda um ombro 138 dentro do canal 110, abaixo da abertura oblíqua 108. Um eixo de menor diâmetro 120 estende-se de uma extremidade do membro com lingueta 105 a um ombro 122 em uma extremidade da parte superior do membro com lingueta 105. O membro de propensão 140 é disposto entre o ombro 122 e o ombro 138 do canal 110 para forçar o membro com lingueta 105 rumo à abertura 108. O diâmetro de uma parte do canal 110 mais próxima da abertura 108 do que do ombro 138 é maior do que o diâmetro da parte do canal 110 que se estende, além do ombro 138, para longe da abertura 108. Os versados na técnica perceberão que os diâmetros dessas partes do canal 110 correspondem aos diâmetros da extremidade proximal 118 do membro com lingueta 105 e da haste 102, respectivamente.
Em uso, o pino intramedular 104 penetra em um canal intramedular (por exemplo, do fêmur) com o eixo central da abertura oblíqua 108 substancialmente alinhado ao eixo central do pescoço femoral. Os versados na técnica perceberão que é possível inserir o pino intramedular 104 no osso usando-se qualquer método adequado. Por exemplo, é possível inserir um fio-guia no canal medular do eixo longitudinal e deslizar o pino X. intramedular ao longo dele. Sendo assim, os versados na técnica também perceberão que o pino intramedular 104 e o mecanismo de travamento 106 dentro dele também podem incluir uma cavidade para o fio-guia ao longo de seu eixo longitudinal. Depois de posicionar adequadamente o pino intramedular 104, inserimos o implante 102, através do osso, na abertura oblíqua 108 até a posição desejada e o giramos para retomar o mecanismo de travamento 106 à primeira configuração, impedindo novos movimentos medianos, conforme descrito acima.
Contudo, caso surja a necessidade de remoyer o implante 102 por algum motivo, é possível girá-lo em tomo do eixo central da abertura oblíqua 108, conforme ilustra a Fig. 11, para mover a protuberância 128 para fora da ranhura 118 e forçar o membro com lingueta 105 de volta à primeira configuração. Assim, o mecanismo de travamento 106 desengata-se das estruturas de contato 116 do implante 102 e o implante 102 pode deslizar por completo para fora da abertura 108 mesmo após a protuberância 128 ser disposta distalmente além da extremidade distai da ranhura 118. Se a estrutura de contato com o osst) do implante 102 tiver a forma de uma pá helicoidal, os versados na técnica perceberão que essa estrutura pode se acoplar rotativamente à haste 112 do implante 102 a fim de manter o engate entre o mecanismo de travamento 106 e as estruturas de contato 116 do implante 102. Dessa forma, qualquer rotação da pá helicoidal durante a introdução exigiria uma rotação correspondente da haste 112. Porém, os versados na técnica perceberão que a estrutura de engate com o osso do implante 102 pode ser qualquer estrutura conhecida capaz de fixar a cabeça e o X. pescoço femorais na haste pelo engate de um pino intramedular 104.
Conforme ilustram as Figs, de 12 a 18, um dispositivo 200 de acordo com outra concretização da presente invenção compreende um implante 202 e um pino intramedular 204 com um mecanismo de travamento 206 dentro dele. Conforme ilustra a Fig. 12, o dispositivo 200 é substancialmente parecido com o dispositivo 100 descrito acima incluindo um membro de propensão 240 (por exemplo, uma mola) que move o mecanismo de travamento 206 dentro de um canal 210 do pino 204 ao longo do eixo longitudinal do pino 204. O mecanismo de travamento 206 também se move entre as configurações primeira e segunda, nas quais uma lingueta 226 entra e sai da abertura 208 para se engatar e desengatar das estruturas de contato 216 do implante 202.
No entanto, o membro com lingueta 205 do mecanismo de travamento 206 não inclui uma protuberância semelhante à protuberância 128 para engatar o implante 202 e mover o membro com lingueta 205. O implante 202 pode ser substancialmente parecido com o implante 102, salvo pela ausência de ranhuras semelhantes à ranhura 118. Em vez disso, uma haste 212 do implante 202 pode incluir vários entalhes 218 que se estendem na longitudinal ao longo de parte de seu comprimento e separados uns dos outros em tomo da circunferência da haste 212 por uma distância correspondente à separação de um par de pás de engate com as ranhuras 228 que se projeta a partir de uma superfície de engate com o implante 230 X do membro com lingueta 205. Dessa forma, uma primeira pá 228 penetra em um entalhe 218 correspondente. Quando as pás 228 penetram nos entalhes 218, as estruturas de contato 216 do implante 202 alinham-se à lingueta 226 do membro com lingueta 205. O engate entre as pás 228 e os entalhes 218 impede que a haste 212 gire dentro da abertura 208. Conforme ilustra a Fig. 14, o mecanismo de travamento 206 pode ser substancialmente semelhante ao mecanismo de travamento 106 com a lingueta 226 estendendo-se a partir da superfície de engate com o implante 230 e engatando-se às estruturas de contato 216 para impedir o X. movimento mediano do implante 202 além de uma posição mediana máxima definida.
O mecanismo de travamento 206 inclui um orifício lateral 246 alinhado a uma abertura correspondente 250 adjacente à extremidade lateral da abertura 208 de modo que uma ferramenta possa ser inserida através dela para se engatar ao membro com lingueta 205 e movê-lo manualmente entre a primeira configuração, ilustrada nas Figs. 15 e 16, e a segunda configuração, ilustrada nas Figs. 17 e 18. O orifício 246 pode incluir uma superfície inclinada 248 de modo que, quando um pino 252 for inserido nele pelo orifício 250, o pino 252 engate-se de maneira corrediça à superfície inclinada 248, impelindo o membro com lingueta 205 mais para dentro do canal 210, desengatando assim o mecanismo de travamento 206 das estruturas de contato 216 para permitir a introdução e/ou a remoção do implante 202 da abertura 208 para a segunda configuração. Os versados na técnica perceberão que a superfície inclinada 248 permite minimizar o tamanho do orifício 246 de modo que ele não precise se estender a um orifício alongado 224 do mecanismo de travamento 206 que se engata a um pino (não- ilustrado) da mesma maneira que o pino 135 do dispositivo 100 para impedir que o membro com lingueta 205 mova-se dentro da abertura 208 além da primeira configuração.
O dispositivo 200 pode ser usado substancialmente da mesma maneira que o dispositivo 100 descrito acima. No entanto, ao inserir o implante 202 através do pino 204, inserimos o pino 252 no orifício 246 do mecanismo de travamento 206 através do orifício 250 a fim de mover o mecanismo de travamento 206 à segunda configuração. Em seguida, inserimos o implante 202 na posição desejada substancialmente da mesma maneira descrita acima e removemos o pino 252 para permitir que o membro com lingueta 205 volte à primeira configuração pela ação do membro de propensão 240 para fixar o mecanismo de travamento 206 nas estruturas de contato 216 e impedir novos movimentos medianos por parte do implante 202. Assim como no dispositivo 100, o formato das estruturas de contato 216 permite que o implante 202 mova-se lateralmente sobre a lingueta 226.
Conforme ilustram as Figs, de 19 a 27, de acordo com outra concretização da invenção, um dispositivo 300 compreende um implante 302 e um pino intramedular 304 com um mecanismo de travamento 306 dentro dele. Conforme ilustram as Figs. 19 e 20, o dispositivo 300 é substancialmente semelhante aos dispositivos 100, 200 descritos acima, salvo pelas indicações explicitadas abaixo. O implante 302 também é substancialmente parecido com o implante 102, incluindo uma haste 312 com várias estruturas de contato 316 e uma ranhura longitudinal 318; De maneira semelhante ao pino intramedular 104, o pino intramedular 304 inclui uma abertura oblíqua 308 para receber o implante 302. Entretanto, um canal 310 do pino intramedular 304 dentro do qual mecanismo de travamento 306 é alojado estende-se proximalmente em relação à abertura oblíqua 308 rumo à extremidade proximal do pino intramedular 304.
Conforme ilustram as Figs. 21 e 22, um membro com lingueta 305 do mecanismo de travamento 306 é composto ainda por elementos primeiro 318 e segundo 320. O primeiro elemento 318 acopla-se ao segundo elemento 320 de modo que eles se movam em relação um ao outro ao longo e em tomo do eixo longitudinal. Conforme ilustram as Figs. 23 e 24, o primeiro elemento 318 inclui uma cabeça 360, uma haste 362 e uma esfera 372 em uma extremidade distai 366 da haste 362 configurada para se engatar a um recesso correspondente do segundo elemento 320. O diâmetro da esfera 372 pode ser maior do que o diâmetro da haste 362.
A cabeça 360 estende-se proximalmente a partir de uma extremidade proximal 364 da haste 362 e inclui um rosqueamento 368 em tomo de sua superfície externa. A cabeça 360 inclui ainda uma estrutura-guia 376 em sua extremidade proximal 370 configurada para receber uma ferramenta. Por exemplo, a estrutura-guia 376 pode ser um recesso hexagonal configurado para receber a ponta hexagonal de uma chave de fenda. Os versados na técnica perceberão, contudo, que a estrutura-guia 376 pode adotar qualquer um dentre vários formados e dimensões desde que seja configurada para receber uma ferramenta capaz de girar o primeiro elemento 318 em relação ao segundo 320 e ao pino intramedular 304. Uma ranhura anelar 322 formada na superfície distai da extremidade distai 374 da cabeça 360 recebe a extremidade proximal 344 de um membro de propensão 340 (por exemplo, uma mola). O membro de propensão 340 pode se estender em tomo da haste 352 do primeiro elemento 318. O primeiro elemento 318 também pode incluir um canal 378 que o atravesse longitudinalmente .para acomodar instrumentos com hastes de escareação ou fíos-guia etc.
Conforme ilustram as Figs. 25 e 26, o segundo elemento 320 estende-se de uma extremidade proximal 380 a uma extremidade distai 382 e inclui um espaço 346 em seu centro de formato e dimensão propícios a acomodar a esfera 372 do primeiro elemento 318a fim de formar uma articulação esférica. A extremidade proximal 380 inclui um orifício 384 que culmina no espaço 346 para acomodar a haste 362 quando o espaço 346 receber a esfera 372. O segundo elemento 320 pode incluir ainda uma abertura 348 ao longo de parte de sua superfície externa 386 para que seja possível encaixar a esfera 372 por ela. A abertura 348 deve ser menor do que o diâmetro da esfera 372 de modo que o segundo elemento 320 se deforme levemente para receber a esfera 372 dentro dele e a esfera 372 não saia dele com facilidade.
A extremidade distai 382 inclui uma primeira protuberância 326 para se engatar às estruturas de contato 316 e uma segunda protuberância 328 para se engatar à ranhura longitudinal 318. Uma superfície inclinada 325 da primeira protuberância 326 pode ser formada substancialmente em paralelo X. à inclinação das superfícies inclinadas 317 de cada uma das estruturas de contato 316 para minimizar a resistência ao deslizamento proximal por parte das estruturas de contato 316 sobre a protuberância 326. Assim como nas concretizações anteriores, o contato entre a superfície de contato 327 da protuberância 326 e a superfície de contato 319 de qualquer uma das estruturas de contato 316 impede que o implante 302 mova-se medianamente além de uma posição mediana máxima predefinida. A segunda protuberância 328 tem dimensão e formato propícios para penetrar na ranhura longitudinal 318 de modo que esta possa deslizar ao longo dela. As protuberâncias primeira 326 e segunda 328 podem ser dispostas de lados opostos uma da outra em relação ao eixo longitudinal do implante 302 de modo que o engate da primeira protuberância 326 com os vários entalhes 316 e o engate da segunda protuberância 328 com a ranhura longitudinal 318 impeçam a rotação da haste 312 do implante 302 em tomo do eixo longitudinal da abertura 308. A extremidade proximal 380 do segundo elemento 320 também pode incluir uma ranhura 338 que envolva a abertura 3 84-para receber a extremidade distai 342 do membro de propensão 340 para que ele force o contato do segundo elemento 320 com o implante 302.
O segundo elemento 320 inclui ainda um elemento longitudinal 388 que se estende a partir da superfície externa 386 ao longo de ao menos parte de seu comprimento. Conforme ilustra a Fig. 27, o elemento longitudinal 388 pode ser configurado para que possa deslizar dentro de uma fenda longitudinal 390 dentro do canal 310 do pino intramedular 304 para que o segundo elemento 320 e o pino intramedular 3Ô4 se movam em relação um ao outro ao longo do eixo longitudinal, mas não girem em relação um ao outro em tomo do eixo longitudinal.
O implante 302 é inserido na abertura oblíqua 308 do pino intramedular 304 até chegar à posição desejada em relação ao pino 304 e ao osso. Ao chegar à posição desejada, inserimos o mecanismo de travamento 306 montado no canal 310 do pino intramedular 304 alinhando o elemento longitudinal 388 à fenda longitudinal 390 de modo que o mecanismo de travamento 306 deslize longitudinalmente ao longo do pino 304. Em seguida, inserimos uma chave de fenda no meio-guia 376 para conduzir o mecanismo de travamento 306 à distância desejada dentro do canal 310 girando o primeiro elemento 318 em relação ao segundo 320 conforme os versados na técnica compreenderão. Sendo assim, o canal 310 pode incluir um rosqueamento (não- ilustrado) correspondente ao rosqueamento 366 do primeiro elemento 318 para que o primeiro elemento 318 e o canal 310 engatem-se um ao outro. A medida que o primeiro elementQ 318 gira em tomo do eixo longitudinal, ele pressiona o segundo elemento 320 rumo ao canal 310. O mecanismo de travamento 306 pode ser conduzido dentro do canal 310 até que a extremidade distai 382 do segundo elemento 320 entre em contato com a haste 312 do implante 302.
O implante 302 deve ser posicionado de modo que, quando do contato do mecanismo de travamento 306 com a haste 312, a primeira protuberância 326 engate-se a uma das estruturas de contato 316 correspondente à posição mediana máxima desejada do implante 302 e a segunda protuberância 328 engate-se à ranhura longitudinal 318. Assim como nas concretizações já descritas, após engatar o implante 302 por meio do mecanismo de travamento 306, ele pode se mover lateralmente em relação à abertura 308, mas é impossibilitado de se mover medianamente graças ao contato entre a superfície de contato 327 da protuberância 326 e a superfície de contato 319 da estrutura de contato 316 correspondente do implante e à operação do membro de propensão 340 para manter o contato desejado entre eles. X.
Conforme ilustram as Figs, de 28 a 34, de acordo com outra concretização da invenção, um dispositivo 400 pode ser substancialmente semelhante ao dispositivo 300, mas, além de ser composto por um implante 402 e um pino intramedular 404, o mecanismo de catraca dele compreende partes primeira 406 e segunda 492, respectivamente, de lados opostos do implante 402 em relação uma à outra. Conforme ilustra a Fig. 28, o implante 402 inclui uma haste 412 que inclui várias estruturas de contato 416 distribuídas ao longo de parte de seu comprimento. À semelhante dos implantes 102, 202 ev302, cada uma das estruturas de contato 416 inclina-se rumo à extremidade proximal 414 da haste 412 com uma superfície de contato distai 419 que, em uma primeira configuração, engata-se à lingueta da segunda parte 492 do mecanismo de travamento para impedir o movimento do implante 402 medianamente após a definição da posição inicial do implante 402 (por exemplo, quando implantado) ao mesmo tempo em que permite a migração lateral do implante 402.
O pino intramedular 404 pode ser substancialmente semelhante ao pino intramedular 304, salvo por um canal 410 que se estende através da abertura oblíqua 408 de uma extremidade proximal 494, próxima da abertura 408, a uma extremidade distai 496, distante da abertura oblíqua 408. A primeira parte 406 do mecanismo de travamento encontra-se dentro da parte do canal 410 que se estende proximalmente em relação à abertura oblíqua 408, ao passo que a segunda parte 492 encontra-se dentro da parte do canal 410 distai da abertura oblíqua 408.
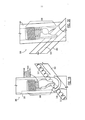
À semelhança do mecanismo de travamento 306, a primeira parte 406 inclui um primeiro elemento 418 acoplável a um segundo elemento 420 com um membro de propensão 440 retido entre eles dentro de uma ranhura 422 do primeiro elemento 418 e uma ranhura 438 do segundo elemento 420. Os elementos primeiro 418 e segundo 420 podem se acoplar um ao outro por meio de uma esfera 472 do primeiro elemento 418 que é inserida em um espaço 446 do segundo elemento 420, conforme ilustra a Fig. 33. O segundo elemento 420, contudo, inclui uma protuberância alongada 428 que se estende da extremidade distai 482 da superfície externa 486 do segundo elemento 420 radialmente além da circunferência da abertura 408. A protuberância alongada 428 é maior do que o diâmetro da abertura oblíqua 408 de modo que, quando o mecanismo de travamento se mover longitudinalmente através do canal 410 da primeira configuração à segunda, a protuberância alongada 428 cruze a abertura 408 para acionar a segunda parte 492 do mecanismo de travamento, fazendo com que ela se articule. Mais especificamente, a extremidade distai 482 permanece próxima à abertura 408 o tempo todo, ao passo que a protuberância 428 estende-se ao longo e além da abertura 408 para chegar à segunda parte 492. Na primeira configuração, conforme ilustram as Figs. 29 e 30, a primeira parte 406 do mecanismo de travamento é disposta dentro do canal 410 com a protuberância alongada 428 afastada da segunda parte 492. Conforme ilustram as Figs. 31 e 32, ao passar à segunda configuração, a primeira parte 406 do mecanismo de travamento move-se distalmente ao longo do canal 410 movendo a protuberância alongada 428 distalmente além da abertura oblíqua 408 para articular a segunda parte 492 de modo que uma lingueta 426 que se projeta a partir de uma superfície voltada para o implante 430 da segunda parte 492 engate-se à estrutura de contato 416 correspondente à posição mediana máxima desejada para o implante 402.
Conforme ilustra a Fig. 34, a segunda parte 492 tem dimensão e formato propícios se encaixar dentro da parte do canal 410 que se estende distalmente em relação à abertura 408. Sua superfície proximal 430 pode ser inclinada para se alinhar substancialmente à superfície da abertura oblíqua 408 quando na primeira configuração. A segunda parte 492 é disposta rotativamente no canal 410, por exemplo, graças a um orifício 424 para receber um pino (não-ilustrado) inserido através de um orifício 436 correspondente do pino intramedular 404. A segunda parte 492 gira em tomo do pino quando a protuberância 428 entra em contato com ela de modo que a lingueta 426 mova-se para dentro da abertura 408 para se engatar às estruturas de contato do implante 402. Para forçar a segunda parte 492 rumo à primeira configuração, em que a lingueta 426 encontra-se fora da abertura oblíqua 408, o dispositivo 400 compreende ainda uma cavidade 498 dentro do pino intramedular 405 e um membro de propensão 500 dentro dela. O membro de propensão 500 pode ser disposto dentro da cavidade 498 de modo que sua extremidade proximal 502 toque na extremidade distai 431 da segunda parte 492, ao passo que sua extremidade distai 504 toca na extremidade distai 506 da cavidade 498. Sendo assim, a segunda parte 492 é forçada à primeira configuração a todo o momento, salvo quando a protuberância alongada 428 pressiona sua superfície voltadaKpara o implante 430 rumo à segunda configuração.
O dispositivo 400 pode ser usado substancialmente da mesma maneira que os dispositivos 100, 200 e 300. Ao posicionar o pino intramedular 404 dentro do eixo femoral, inserimos o implante 402 na abertura oblíqua 408 do pino intramedular enquanto as partes primeira 406 e segunda 492 do mecanismo de travamento encontram-se na primeira configuração, isto é, sem a protuberância alongada 428 nem a lingueta 426 estenderem-se para dentro da abertura 408. Após inserir o implante 402 na abertura 408 na posição desejada no osso, a primeira parte 406 move-se para a segunda configuração da mesma maneira descrita com referência ao dispositivo 300 para mover a protuberância alongada 428 distalmente até que ela pressione a superfície voltada para o implante 430 da segunda parte 492, articulando assim a segunda parte 492 e movendo a lingueta 426 para dentro da abertura oblíqua 408 para se engatar à estrutura de contato 416 correspondente na posição desejada do implante 402 e definir uma posição média máxima para ele. Conforme descrito acima, a geometria das estruturas de contato 416 é escolhida de modo a permitir a migração lateral do implante 402 dentro da abertura 408.
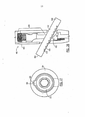
Conforme ilustram as Figs, de 35 a 41, de acordo com ainda outra concretização da invenção, um dispositivo 600 pode ser substancialmente semelhante ao dispositivo 300, salvo conforme descrito em específico abaixo. Conforme ilustra a Fig. 35, o dispositivo 600 compreende um implante 602, um pino intramedular 604 e um mecanismo de travamento 606. Conforme ilustra a Fig. 36, o implante 602 inclui uma haste 612 com uma única superfície rebaixada e afunilada 616, em oposição às várias superfícies de contato descritas acima em relação ao implante 302. A superfície afunilada 616 estende- se da extremidade proximal 614 à extremidade distai 615 com um afunilamento da superfície 618 aumentando da extremidade proximal 614 à extremidade distai 615 de modo que o comprimento da parede 614’ na extremidade proximal 614 seja inferior ao comprimento da parede 615’ na extremidade distai 615. A superfície afunilada 616 é adaptada e configurada para receber parte do mecanismo de travamento 606. O pino intramedular 604 pode ser substancialmente semelhante ao pino intramedular 304, incluindo uma abertura oblíqua 608 para receber o implante 602 e um canal 310 para alojar o mecanismo de travamento 606 dentro dele proximalmente em relação à abertura oblíqua 608 rumo à extremidade proximal do pino intramedular 604.
Conforme ilustra as Figs. 37 e 38, o mecanismo de travamento 606 pode ser substancialmente semelhante ao mecanismo de travamento 306 do dispositivo 300. De maneira semelhante, o mecanismo de travamento 606 inclui um primeiro elemento 618 acoplável a um segundo elemento 620 com um membro de propensão 640 (por exemplo, uma mola) retido entre eles. Além do membro de propensão 640, o mecanismo de travamento 606 inclui ainda uma placa chanfrada 692 retida entre a extremidade distai 642 do membro de propensão 640 e a extremidade proximal 680 do segundo elemento 620 que impede seletivamente o movimento do segundo elemento 620 rumo ao primeiro 618. Mais especificamente, a placa chanfrada 692 inclui uma abertura 698 através dela de tamanho e formato compatíveis com a superfície externa de uma haste 662 do primeiro elemento 618 de modo que, quando a placa chanfrada 692 se inclinar para longe de um plano substancialmente perpendicular ao eixo longitudinal da haste 662, o engate de fricção entre um perímetro da abertura 698 e a superfície externa da haste 662 impeça o movimento relativo entre os elementos primeiro 618 e segundo 620. O primeiro elemento 618 é substancialmente parecido com o X. primeiro elemento 318, incluindo uma cabeça 660 na extremidade proximal da haste 662 e um elemento de acoplamento 672 em sua extremidade distai 666 configurado para se engatar a um recesso de formato correspondente no segundo elemento 620. Um rosqueamento 660 da cabeça pode se engatar à superfície interna do pino intramedular 604 da mesma maneira descrita acima.
O segundo elemento 620 pode ser substancialmente semelhante ao segundo elemento 320, que se estende de uma extremidade proximal 680 a uma extremidade distai 682 e inclui um espaço 646 em seu centro para acomodar de X. maneira corrediça o elemento de acoplamento 672 do primeiro elemento 618 a fim de permitir o movimento relativo entre eles ao longo do eixo longitudinal do pino intramedular 604. Em vez das protuberâncias primeira e segunda das concretizações anteriores, o segundo elemento 620 inclui uma única protuberância alongada 626 que se engata à superfície afunilada 616 do implante 602. A protuberância alongada 626 estende-se a partir da extremidade distai 682 da superfície externa 686 do segundo elemento 620 e afunila-se rumo à sua ponta distai 626. O afunilamento da protuberância alongada 626 pode ser selecionado de modo que a ponta distai fina 626 possa ser recebida na extremidade distai mais fina 615 da superfície afunilada 616 com a profundidade crescente da superfície afunilada 616 permitindo que as partes proximais progressivamente mais grossas da protuberância 626 engatem-se à superfície afunilada 616 à medida que o implante 602 avança distalmente através do pino 604. A superfície afunilada 616 pode ser formada de modo que, quando o implante 602 avançar pela distância desejada através do pino 6Q4, a protuberância 626 seja recebida por completo contra a superfície afunilada 616 adjacente à sua extremidade proximal 614, travando assim o implante 602 na posição distai máxima permitida. Mais especificamente, à medida que o membro de propensão 640 move o segundo elemento 620 distalmente, forçando a protuberância 626 a engatar-se ainda mais à superfície afunilada 616, a placa chanfrada 692 atua como um travamento que impede que o segundo elemento 620 mova-se proximalmente de volta rumo ao primeiro elemento 618. Isso mantém a parte proximal mais grossa da protuberância 626 engatada à superfície afunilada 616, impedindo o movimento distal do implante 602 em relação ao pino 604 já que a espessura da parte proximal da protuberância 626 excede a profundidade da parte mais distai da superfície afunilada 616. O comprimento da protuberância alongada 626 é substancialmente igual ou superior ao diâmetro da abertura oblíqua 608 de modo que toda a largura da superfície afunilada 616 do implante 602 possa ser engatada por uma superfície de contato 625 da protuberância alongada 626.
O implante 602 pode ser inserido através da abertura 608 na posição desejada dentro do osso. Durante a introdução do implante 602, o mecanismo de travamento 606 encontra-se na primeira posição dentro do pino intramedular 604, na qual a protuberância alongada 626 não se estende para dentro da abertura 608. Assim que inserimos o implante 602 na abertura 608 na posição desejada, o mecanismo de travamento 606 é conduzido distalmente através do canal 610 à segunda posição, na qual a protuberância alongada 626 entra em contato com o implante 602 e a superfície de contato 625 toca na parte rebaixada e afunilada 616. Sendo assim, os versados na técnica perceberão que, quando implantada na profundidade desejada dentro do osso, a superfície afunilada 616 do implante 602 estende-se além da abertura 608 do pino intramedular 604.
Mais especificamente, com o mecanismo de travamento 606 na segunda posição, o dispositivo 600 encontra-se em uma posição implantada inicial, conforme ilustra a Fig. 39, com a parte distai da superfície de contato 625 encostando na superfície afunilada 616. Graças ao afunilamento crescente da superfície afunilada 616 distalmente ao longo da haste 612^e ao membro de propensão 640, que força o segundo elemento 620 do mecanismo de travamento 606 a afastar-se do primeiro elemento 618 ao longo do eixo longitudinal do pino intramedular 604, permite-se que o implante 602 migre proximalmente através da abertura 608 ao mesmo tempo em que se mantém o contato entre a superfície de contato 625 e a superfície afunilada 616 rumo a uma posição proximal máxima final, conforme ilustra a Fig. 40. A posição final é atingida após mover o implante 602 lateralmente através da abertura 608 até a superfície de contato 625 entrar em contato com a largura da extremidade distai 615 da supetfície afunilada 616. À medida que o implante 602 move-se lateralmente através da abertura 608, o membro de propensão 640 força a segunda parte 620 do mecanismo de travamento distalmente de modo que a protuberância alongada 626 mantenha contato constantemente com a superfície afunilada 616.
A todo o momento até e após o implante 602 atingir a posição implantada final, o implante 602 é impedido de se mover medianamente através da abertura 608 graças à placa X. chanfrada 692, que trava o mecanismo de travamento 606, impedindo assim que a segunda parte 620 mova-se proximalmente dentro do canal 610 rumo ao primeiro elemento 618, que é fixo dentro do pino intramedular 604. Conforme ilustra a Fig. 41, a placa chanfrada 692 inclui uma primeira parte 694 e uma segunda parte 696 inclinadas em relação uma à outra e substancialmente perpendiculares uma à outra. Conforme descrito acima, a segunda parte 696 inclui um abertura 698 que atravessa a superfície proximal da placa chanfrada 692, que se engata à extremidade distai 642 do membro de propensão 640, ao passo que a extremidade distai 700 da primeira parte 694 engata-se à superfície proximal 680 do segundo elemento 620 com a haste 662 do primeiro elemento 618 recebida através da abertura 696, uma superfície da segunda parte 696 encostando na extremidade distai 642 do membro de propensão 640, ao passo que a borda 700 da primeira parte 694 encosta na extremidade proximal 680 da segunda parte 620. A abertura 698 só é um pouco maior do que o perímetro da haste 662 de modo que, quando o implante 602 tentar se mover medianamente através da abertura obliqua"608, ele empurre a segunda parte 620 no sentido P, inclinando a segunda parte 696 em relação à haste 662 e fazendo com que a superfície interna 702 da abertura 698 entre em contato com a superfície externa 704 da haste 662, impedindo assim que a haste 662 corra através dela e que a segunda parte 620 mova-se no sentido P.
O dispositivo 600 pode ser usado substancialmente da mesma maneira descrita acima em relação ao dispositivo 300. Depois de dispormos o pino intramedular 604 no canal intramedular do osso, inserimos o implante 602 medianamente através da abertura oblíqua 608 até que ele chegue à posição desejada no osso. À medida que o implante 602 penetra na abertura 608, o mecanismo de travamento 606 mantém-se na primeira posição, com a protuberância alongada 626 retida proximalmente acima da abertura 608, deixando uma via aberta para a introdução do implante 602 através dela. Após o implante 602 chegar à posição distai máxima desejada no osso, com a superfície afunilada 616 estendendo-se além da abertura 608 do pino intramedular 604, o mecanismo de travamento 606 é conduzido distalmente para dentro do pino intramedular 604 até que a protuberância alongada 626 estenda-se para dentro da abertura 608 com a superfície de contato 625 engatada à superfície afunilada 616 do implante 602 na segunda posição. Mesmo depois de o implante 602 estar dentro da abertura 608 na posição implantada inicial, ele pode se mover proximalmente ao longo da abertura 608, ao passo que seu movimento distai em relação ao pino 604 é substancialmente impossibilitado. Contudo, assim que o implante 602 chegar à posição implantada final, xúe é impedido de novos movimentos proximais e distais em relação ao 5 pino 604, conforme descrito acima.
Ficará evidente aos versados na técnica a possibilidade de realizar várias modificações e variações na estrutura e metodologia da presente invenção sem, com isso, divergir de sua essência ou de seu âmbito. Sendo assim, tenciona- io se que a presente invenção abranja modificações e variações a ela contanto que dentro do âmbito das reivindicações anexas e de seus equivalentes.