CN101044672A - 分阶段电动机启动和y/△转换 - Google Patents
分阶段电动机启动和y/△转换 Download PDFInfo
- Publication number
- CN101044672A CN101044672A CNA2005800324226A CN200580032422A CN101044672A CN 101044672 A CN101044672 A CN 101044672A CN A2005800324226 A CNA2005800324226 A CN A2005800324226A CN 200580032422 A CN200580032422 A CN 200580032422A CN 101044672 A CN101044672 A CN 101044672A
- Authority
- CN
- China
- Prior art keywords
- motor
- phase
- voltage
- supply voltage
- windings
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P1/00—Arrangements for starting electric motors or dynamo-electric converters
- H02P1/16—Arrangements for starting electric motors or dynamo-electric converters for starting dynamo-electric motors or dynamo-electric converters
- H02P1/24—Arrangements for starting electric motors or dynamo-electric converters for starting dynamo-electric motors or dynamo-electric converters for starting an individual AC commutator motor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P1/00—Arrangements for starting electric motors or dynamo-electric converters
- H02P1/16—Arrangements for starting electric motors or dynamo-electric converters for starting dynamo-electric motors or dynamo-electric converters
- H02P1/26—Arrangements for starting electric motors or dynamo-electric converters for starting dynamo-electric motors or dynamo-electric converters for starting an individual polyphase induction motor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P1/00—Arrangements for starting electric motors or dynamo-electric converters
- H02P1/02—Details of starting control
- H02P1/029—Restarting, e.g. after power failure
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Motor And Converter Starters (AREA)
- Control Of Ac Motors In General (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
- Control Of Electric Motors In General (AREA)
Abstract
公开一种启动方法以及用于启动多相电机的设备。目标是减小电动机产生的转矩中的振荡脉动以及在启动之后不久出现的涌入电流。启动方法包括在电源相位的受控点首先把多个绕组中的至少一个但少于全部的绕组连接到相应的相移电源电压的步骤。然后,在步骤i进行的连接之后的受控延迟之后,把机器的那个或者每个其余绕组连接到相应的相移电源电压。本发明特别适用于多相(最常用的为3相)电动机。但是,它还可适用于其它电机,例如发电机和变压器。该方法可在初始启动时或者在对电动机应用的情况中、在Y-Δ切换时执行。在产生明显反emf的负载的重新连接时,当反emf实质上与电源电压的相位同相时发起2步过程。
Description
本发明涉及用于电动机启动和转换的控制系统、电动机以及用于启动和转换电动机的方法。
当电磁接触器用于使感应电动机从静止开始启动时,在加速过程中,电动机从电源吸取等于电动机满载电流(FLC)的六至十倍的启动电流,取决于电动机的规格和构造。当电动机接近全速时,电流下降到满负荷值或者当电动机上的负荷低于满负荷时下降到更小值。
但是,出现多种不希望的附加现象,这些现象由电源到电动机的突然连接所引起。最明显的是,在接通之后的前几分之一秒左右(对于大电动机增加到多秒)中,在电动机所产生的转矩中存在严重的振荡脉动。这可能作为一种强大振动被听到和感觉到,这种强大振动对于电动机所连接的整个传动系施加高机械应力,特别是对联轴器、变速箱、轴承以及对定子绕组通过它们遇到的反作用力施加高机械应力。脉动转矩中的峰值可能为正以及为负,并且可能是正常运行时遇到的最大转矩的许多倍。转矩的这种变化可能是引起故障、特别是受到频繁启动的电动机中的故障的重要因素。
不太明显但同样严重的是以下事实:在转矩脉动的瞬变周期中,电源电流峰值可能达到预计稳态锁定转子启动电流的两倍。这个异常高的电流称作浪涌电流,并且可能导致电动机保护的问题。一般来说,电动机起动器把接触器与过载保护结合,以便在电动机吸取过大电流时断开其连接。过载机制必须允许高启动电流而没有过早地断开电动机,但是仍然能够在电动机变为过载并吸取仅超过满载电流的110%的电流时在运行期间关闭电动机。对于高效电动机,浪涌电流可能达到FLC的十八倍,它使允许启动但仍然提供充分运行保护的过载继电器和过载断路器的设置复杂化。
本发明的目标是解决或者至少改善3相电动机启动期间出现的问题。
本发明人已经发现,无论如何,能够通过修改起动器接触器被接通的方式来减小或消除转矩脉动以及涌入电流的加倍。按照传统方法,在3相系统中,三相的每相的触点同时闭合。这种同时闭合除了预计锁定转子电流之外还产生瞬变电流浪涌以及转矩的关联瞬变脉动。另一方面,如果在通过连接设置在电源与电动机端子之间的诸如接触器极之类的装置所连接的3线系统中,两个触点当两相之间的线电压处于其峰值时首先闭合,然后第三触点在四分之一周期之后闭合,则转矩脉动以及浪涌电流均被减小或消除。
为此,从第一方面,本发明提供启动多相电机的方法,包括以下步骤:i.把多个绕组中的至少一个但少于全部的绕组在电源相位的受控点连接到相应相移电源电压;以及ii.在紧接步骤i中进行的连接的可控延迟之后,把电机的那个或每个剩余绕组连接到相应相移电源电压。
在适当的时候,将提供关于接触器开关序列中的这种简单修改为什么有效的说明。这将称作波形点(POW)开关。描述了实现这个目标的控制方法及其对Y连接和Δ连接电动机的直接(DOL)启动的应用。POW开关也可适用于使伴随Y-Δ起动器中从星形(Y)到Δ连接的转变的不适当且严重的瞬变现象为最小,并且还可减小变压器通电时以及在把备用和风力发电机连接到变压器或者连接到主电源时出现的巨大浪涌电流。
通常在步骤i.中,在选择成当机器中的感应反电动势(e.m.f.)实质上与电源电压同相时出现的受控点上进行连接。该方法还可包括监测反e.m.f.的相位,以便确定反e.m.f.与电源电压同相的时间。根据从电源到负载的连接的配置,受控延迟可对应于90°或120°的相位延迟。
在典型实施例中,绕组中的至少一个通过电气控制的单接触器极来连接。有利的是,至少一个接触器极通过开关直流电压源来连接,以便取得触点闭合的可重复且精确定时。在这个上下文中,采用DC来控制连接器极允许其闭合比采用交流控制连接器极的情况更为精确地定时。
体现本发明的这个方面的方法通常适用于包括三相电动机的电机。在这类情况中,该方法可在从电动机绕组的Y配置转换到电动机绕组的Δ配置时执行。例如,从电动机绕组的Y配置到电动机绕组的Δ配置的转换可在电动机的全工作转速的75%或以上来进行。或者,从电动机绕组的Y配置到电动机绕组的Δ配置的转换可在Y配置中的启动电流下降到低于预定门限时或者在预定启动时间之后进行。
体现本发明的这个方面的方法也可适用于包括下列各项的任一个或多个的电机:风力发电机、变压器或备用发电机。在这类情况中,备用发电机可连接到变压器或者连接到电机。
从第二方面,本发明提供防止在交流电源电压丢失之后多相电机中的电流或转矩瞬变的方法,包括以下步骤:i.从电源断开机器的绕组;ii.监测机器的端子上的反e.m.f.;iii.确定反e.m.f.与交流电源电压的模型相位之间的相位差;iv.当已恢复电源和反e.m.f.实质上同相时,连接交流电源电压源与电机之间的至少一个绕组;以及v.在受控延迟之后闭合其余接触器极。这样一种方法通常可适用于电机为三相电动机的情况。
从第三方面,本发明提供包括多个接触器极和控制装置的多相交流电机,接触器极的每个设置成连接到相应交流电源电压,相应交流电压的每个相对彼此进行相移,控制装置设置成控制接触器极到其相应交流电源电压的连接,其中,控制装置设置成在第一时间点把多个连接器极中的一部分而不是全部连接到其相应交流电源电压,以及在受控时间延迟之后把其余连接器极连接到其相应交流电源电压。
控制装置可包括设置成监测反电动势和交流电源电压的相对相位或频率的监测部件。控制装置通常设置成在与90°或120°的相位延迟对应的受控时间延迟之后把其余接触器极连接到其相应交流电源电压。作为替代或补充,机器可包括设置成把绕组的至少一个转换成与交流电源电压连接以及不与交流电源电压连接的电动操作的开关部件。有利的是,开关部件可由直流电压源来操作。
在本发明的典型实施例中,电机为三相电动机。在这类实施例中,控制装置可设置成控制电动机从电动机绕组的Y配置到电动机绕组的Δ配置的转换。在电动机绕组的Δ配置中,接触器极可位于电动机绕组的Δ配置的内部,或者它们可位于电动机绕组的Δ配置的外部。
体现本发明的控制装置可在Δ配置中重新连接期间设置成监测电动机绕组的Δ配置的一个绕组中的反e.m.f.,绕组连接到其余极接触器的至少一个,控制装置还设置成在反e.m.f.与将连接在那个绕组上的交流电源电压同相时把相应交流电源电压连接到该绕组。
在备选实施例中,电动机的电动机绕组可设置成在机器工作的初始周期中在Y配置中连接到交流电源电压,以及电动机绕组设置成在机器工作的第二周期中在Δ配置中重新连接到交流电源电压。在这类实施例中,控制装置可设置成当电动机的转速达到全工作速度的至少75%时或当Y配置中的启动电流下降到低于预定门限时或者在电动机接近全速时的预定启动时间之后,从电动机绕组的Y配置转换到电动机绕组的Δ配置。
在本发明的这个方面的备选实施例中,电机可包括以下各项的任一个或者它们的组合:风力发电机、变压器、备用发电机以及三相电动机。从第四方面,本发明提供适合用于多相交流电机的控制装置,该装置设置成控制多个接触部件的断开和闭合,接触部件设置成有选择地使机器的绕组与多相交流电源电压电气连接,其中,该装置设置成在受控延迟之后闭合至少第二接触部件之前闭合至少第一接触部件。
典型实施例包括设置成接收表示关联至少第一接触部件的至少一个相应电源电压与来自关联将被连接到所述电源电压的电机绕组的传感器的反e.m.f.之间的相对相位差的信号的处理器。处理器可设置成当至少一个电源电压与它将连接到的机器绕组的反e.m.f.同相时输出信号以闭合至少第一接触部件。
控制装置可设置成响应反e.m.f.与电源电压的预计相位之间的表明所述电源电压丢失的相位差而断开接触部件中的一个或多个。
从第五方面,本发明提供在处理器上运行时使处理器执行以下步骤的软件:i.接收表示设置成被提供给多相电机的交流电源电压的相位的第一信号;ii.接收表示多相交流电机的组件中的反e.m.f.的相位的第二信号;iii.根据第一和第二信号来确定反e.m.f.与电源电压之间的相位差;以及下列步骤的任一个:a.如果反e.m.f.很大,则等到反e.m.f.开始与电源同步,以电源中的预定相角发起两步连接过程,从而有选择地使电机与电源电压接触;或者b.如果反e.m.f.小,则输出信号以便以电源中的预定相角在受控两步过程中起动接触部件,从而有选择地使电机与电源电压接触。
体现本发明的软件通常设置成在反e.m.f.与要在电机的元件上连接的电源电压之间的相位差实质上为零时起动接触部件,以便把该元件连接到电源电压。作为替代或补充,软件可设置成在反e.m.f.与根据它的已知频率来预计的电源电压相位之间的相位差时起动接触部件以便拆除电机与电源电压的连接。
从第六方面,本发明提供控制对多相交流电机的交流电压施加的方法,包括:i.接收表示设置成被提供给电机的交流电源电压的相位的第一信号;ii.接收表示多相交流电机的组件中的反e.m.f.的相位的第二信号;iii.根据第一和第二信号来确定反e.m.f.与电源电压之间的相位差;以及根据确定来执行下列步骤的任一个:a.如果反e.m.f.很大,则等到反e.m.f.开始与电源同步,以电源中的预定相角发起两步连接过程,从而有选择地使电机与电源电压接触;或者b.如果反e.m.f.小,则输出信号以便以电源中的精确相角在受控两步过程中起动接触部件,从而有选择地使电机与电源电压接触。
该方法可在反e.m.f.与根据它的已知频率预计的电源电压相位之间的相位差表示电源电压丢失时,响应控制信号而起动接触部件,以便拆除电机与电源电压的连接。
在其中电机为风力发电机、体现本发明的第一方面的方法中,受控时间延迟对应于某个延迟,在该延迟之后,发电机e.m.f.的相位变为实质上与电源电压的相位同步。
本发明还提供有效地使电动机反转的方法,由此,在电源与已经沿第一方向旋转的电动机断开连接并交换两个相连接以便能够以相反方向驱动电动机之后,电源到电动机的重新连接通过根据本发明的第一方面的方法来进行。
具体来说,通过本发明的实施例将取得以下益处的部分或全部:
电动机中的浪涌电流的显著减小,通常减小为二分之一。
机械负荷和电气绕组的有害峰值转矩的相继50%减小。
系统范围的浪涌过流的减小允许断路器被设置在确保系统健壮性的等级,由此改进工厂范围的正常运行时间和整体安全性。当前工业惯例是把跳闸电流设置成比预期的高50%,以便避免由浪涌过流引起的断路器的有害跳闸。
Y-Δ起动器中的功率电阻器和转变接触器的消除。
在向大变压器供电时,涌入浪涌电流按高达十的因子减小。
备用和风力发电机上的机电高峰负荷的减小。
电气控制器中高达50%的规格及成本减小。
工厂范围的机电维护的显著减少,具有相应的停机时间的减小以及安全性的提高。
为了良好状态目的而提供对工厂开关操作的实时监测的固有能力。
有害短路电流的减小,特别是对于例如冷却器等的封装/限定的应用以及对于电动机控制中心可见到的物理上分散的负载。
现在通过举例、参照附图详细说明本发明的实施例,附图中:
图1是迹线,说明采用接触器极的同时闭合的空载Δ电动机的全DOL启动期间的瞬变电流和电压;
图2是迹线,说明在通过体现本发明的方法所启动的图1的电动机的启动期间的瞬变电流和电压;
图3说明Y配置的电动机的连接;
图4是空间向量图,说明电动机的三相的同时连接的作用;
图5是空间向量图,说明根据本发明的一个实施例的电动机的三相的两阶段连接的作用;
图6表示相位电压波形,说明2阶段接通的三个备选连接次序;
图7说明具有外部接触器极的Δ连接电动机;
图8说明具有设置在Δ内的接触器极的Δ连接电动机;
图9说明启动具有Δ内的接触器极的Δ电动机的第一阶段;
图10说明采用同时接触器闭合的Y-Δ启动期间的电流和电压;
图11说明与图10相同的Y-Δ启动,但允许0.1秒让转子电流及定子绕组中感应的关联反e.m.f.衰减;
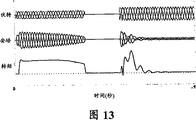
图12和图13说明相同的启动,但是体现本发明的开关用于初始Y连接以及Δ重新连接;
图14说明采用同时触点闭合、以全速的80%按照Δ重新连接时的电流和电压;
图15说明采用POW触点闭合、以全速的80%按照Δ重新连接时的电流和电压;
图16是Y连接电动机的POW启动的接触器极S1、S2和S3的闭合的时序图;
图17是框图,说明用于实现本发明的软件的结构;
图18是流程图,说明实现本发明的一个实施例的软件控制系统中的软件例程的操作;
图19是流程图,说明例程“按照Y启动电动机”以及图18的例程“电动机按照Y运行”;
图20是流程图,说明软件中的次要例程;
图21是流程图,说明子例程“按照Y启动电动机”以及例程“电动机按照Y运行”;
图22是流程图,说明子例程“同步反e.m.f.与电源”;
图23说明本发明的一个实施例中用于按照Δ连接电动机的接触器配置;
图24是通过体现本发明的方法按照Δ连接电动机的时序图;
图25是在本发明的一个实施例中、按照Δ重新连接电动机以及按照Δ连续电动机运行的例程的流程图;
图26是当所有三相触点同时闭合时通过反相自全速的DOL电动机反转期间出现的电流、电压和转矩的曲线;以及
图27是采用具有相位同步的两步POW触点闭合的DOL电动机反转期间出现的电流、电压和转矩的曲线。
作为对本发明背后的思考的介绍,现在将提供对于在电动机的启动期间三相的同时开关如何产生瞬变浪涌电流的简述。当感应电动机静止时,内部产生的反e.m.f.为零。如果定子电阻Rs被忽略,则当施加电源时,电流通过定子电感来确定。如果所有三相共同被激励,则电流由将流动的平衡稳态3相交流启动电流加上以不同数量存在于各相中的按指数衰减直流瞬变电流组成。
DC瞬变的幅度当所有电流为零时在连接时确定,以及它们的变化速率受到电动机电感限制。因而断定,在紧跟连接之后的时刻,在电流有时间增加之前,它们必须仍然为零。因此,紧跟连接之后:
稳态电流+直流瞬变电流=0
使得直流瞬变电流的幅度在时间零处等于(负)稳态启动电流值。这个直流电流以电动机磁化时间常数衰减,并且通常花费0.2-5秒衰退,随电动机规格增大。
直流电流的影响是引起伴随电动机启动的严重转矩脉动。出现这种情况是因为不是稳态交流电流产生的均匀旋转磁场、而是直流瞬变引入附加的非旋转、衰减直流场分量。这在它们被对齐时加到交流场,但是半周期之后从交流场中减矢,因为它们在那时相反。不是保持稳定(旋转)值,因而电动机磁通在(交流磁通+直流磁通)与(交流磁通-直流磁通)之间振荡。这在仅随直流磁通衰退而下降的电源频率上导致电动机转矩的严重振荡。它在大电动机中可能持续数秒。
图1说明在采用接触器极的同时闭合的空载Δ连接电动机的全DOL启动之后出现的电流和电压。底部迹线表示严重的转矩脉动,以及中间曲线表示极不平衡的3相线电流。顶部迹线表示自连接时的电源电压。
已经描述了启动电动机的一种传统方法的作用,现在可以描述本发明减小或消除瞬变现象的方式。
体现本发明的开关方法将称作“波形点”开关,并且这将缩写为“POW”。
在本发明的实施例中,2阶段POW开关能够减小或消除缓慢衰减直流瞬变电流及关联转矩脉动的激励。对于Y连接电动机,仅电动机的两相首先连接到电源端子来建立电动机绕组的两个中的电流。然后,在第三相被连接(在那个绕组中具有零电流)的时刻,所有三个电流完全等于与电源波形上的那个点对应的它们的稳态交流值。如果电流紧接第三相的连接之前和之后处于稳态值,则不需要附加直流瞬变电流,以及电动机以等于稳态锁定转子电流的AC电流的平衡集启动,并且转矩脉动不存在。
在使电动机从静止启动时,当前两相连接时电源波形中的点必须被正确选择,使得那些相中的电流增加以完全达到当第三电源相被连接的时刻所需的稳态值。如果前两相在两相之间的线电压处于其峰值的时刻连接,并且第三相正好在90度之后(四分之一电源周期)连接,则实现这种情况。
现在将描述同时开关和POW开关的实例。
图2说明POW方法对生成图1的迹线的相同电动机的应用的效果。从图2可以看到,转矩脉动实际上被消除,以及电动机电源电流与明显更低的峰值电流相平衡。顶部电压曲线表示2阶段连接次序。
现在提供POW开关的理论说明。具体来说,这个部分陈述2阶段连接过程的理论以及它可如何应用于Y配置以及Δ配置电动机。
因三个电源相的同时开关引起的直流瞬变在Y配置中发生。图3说明Y配置的电动机的连接。接触器极S1、S2和S3可设置在绕组的任一端。
3相电源电压ABC可通过下式给出的空间向量
us(t)来描述
us(t)=usej(wt+α)
(1)
其中us是电源相电压幅度,以及空间向量
us(t)以电源的角频率ω旋转,α是当施加电力时在时间t=0的电源相角。
电动机中的磁通Ψ的建立按照法拉第定律由下式给出
通过积分,

Ψ直流瞬变是满足初始条件所需的积分常数。当
us(t)在时间t=0以相角α施加到电动机、其中在电动机中没有磁通(即Ψ=0)时
因此,直流瞬变磁通由下式给出
使得磁通的一般解为

在三相同时接通的情况中,如图4所示,等式(6)中因子-j乘以电压空间向量
us(t)表示稳态磁通
ΨSS(t)随
us(t)旋转,但在旋转中滞后90度。另一方面,直流瞬变磁通
ΨDC在接通时以超前初始电源向量us(t)的方向90°的取向固定,并且仅逐渐衰退。图4的空间向量图表示等式(3)、(5)和(6)中的关系。稳态磁通
ΨSS(t)具有恒定幅度,并围绕仅缓慢衰退的瞬变
ΨDC所确定的固定中心旋转。因此,当
ΨSS(t)旋转时,直流磁通
ΨDC的出现导致所得磁通
Ψ(t)的幅度强烈振荡。影响是DC瞬变衰退之前的强转矩脉动和不平衡电流。
现在把以上所述与消除直流瞬变的2阶段POW开关进行对比。
如果接通过程分两阶段来执行,则可消除或者实质上减小直流瞬变。首先描述2阶段POW接通过程,然后说明此过程的理论。
第1阶段:通过在Vbc线电压的峰值上闭合接触器极S2和S3,电源电压在时间t=0连接到图3的电动机、仅连接到Y配置电动机的两个绕组B和C。通过绕组B和C的电流在图5所示的方向上建立磁通
Ψ0。没有电流注入绕组A。
第2阶段:在90°之后,当空间向量
us所描述的电源空间向量处于图5中的取向β时,第三接触器极S3闭合。图5说明这个时刻的情况。所有三相被连接,以及电压空间向量和第1阶段所建立的初始磁通对应于正确的稳态值而无需任何附加的直流磁通瞬变
ΨDC。Ψ(0)是当S3闭合时滞后电压空间向量
uS(t)的取向β上瞬时位置90°的稳态磁通
的初始值。此后,电压
uS(t)和磁通
Ψ(t)以其稳态中分隔90°同步旋转而没有转矩脉动和过度的峰值电流。
现在更详细地描述Y配置中的2阶段电动机开关。施加到电动机的电压空间向量的dq分量表示为
uSD=2/3(uSA-0.5uSB-0.5uSC)
uSQ=1/(uSB-uSC)
(7)
其中,uSA、uSB、uSC是三个绕组上的电压。
参照图6,现在考虑表示2阶段接通的三个备选连接次序的相电压波形。垂直线表示进行连接的时间。AB表示相A和B首先被连接,然后在AB+C上的90°延迟β之后进行相C的连接。
现在考虑通过首先连接的相B和C的磁通的建立。
CB线电压按照电源相电压的幅度由下式给出
uCB=uS sin(ωt+α)
(8)
假定在位置CB接通,其中线电压uCB处于其峰值,并且那个点的设定时间t=0,则α=270°。当只有B和C电源电压被连接并且A相绕组保持断开时,线电压在A和B绕组上平均划分,使得绕组电压由下式给出
uSB=-1/2uBC,uSC=1/2uBC,uSA=0
(9)
利用等式(7),dq分量为
uSD=0,uSQ=-uS
(10)
以及uSD在整个周期β保持为零。因此,在相A被连接之前的90°间隔β中,有
对于间隔β积分以得到磁通为
使得当相A在以下条件被连接时
即
这正好是图5所示的瞬时稳态值
Ψ0,从而实现启动而没有任何衰减直流瞬变磁通及关联转矩脉动和极端的电流峰值。
现在论述2阶段POWΔ电动机开关(Δ外部的极)的过程。
当采用两阶段开关连接到Δ配置电动机时,如果接触器极处于Δ外部,则通过闭合两个触点、例如图7所示的D1和D2连接相A和C,在其线电压峰值上连接两相,对于Y连接的电动机进行开关。第三相B则通过闭合D3在90度之后被连接。
现在计算磁通建立。CA线电压为
uCA=uS sin(ωt+π/2)
(15)
以及当CA相在时刻t=0被连接时等于其峰值电压。由于没有到B相的连接,所以三个绕组上的电压表示为
uSA=uS sin(ωt+π/2)
uSB=/2uS sin(ωt+π/2)
uSC=uSB
(16)
因此,采用dq电压等式(7)
uSD=uS
uSQ=0
(17)
对连接相B之前的90度周期的磁通建立积分,得
这是允许启动而没有任何衰减直流瞬变所需的瞬时稳态值
Ψ0。
现在参照图8和图9来描述2阶段POWΔ电动机开关(Δ内的极)的过程。
如果用于Δ操作的接触器极设置在Δ内(对于Y-Δ启动是正常的),则不可能把电源相与绕组完全隔离。在这种情况中,可通过仅闭合一个触点以便仅采用一个绕组(图8中的触点D1以便仅在绕组A中提供电流)建立磁通,来执行第1阶段连接。
由于B和C绕组中没有电流流过,所以磁通必须对于以线电压uCA的60°相角开始的更长周期β=120°而不是对于以电压最大值开始的周期β=90°来建立。这种修改定时如图9所示。
对于施加到图8中的A绕组上的线电压uCA的绕组电压由下式给出
uSA=uS sinωt,uSB=0,uSC=0
(19)
从等式(7),dq空间向量电压由下式给出
uSQ=0
(20)
因此,通过对周期β积分,磁通成为
ΨSQ=0
(22)
这是使接触器极D2和D3能够在CA线电压的过零点处闭合、以便把全电压施加到电动机的全部绕组而没有任何DC瞬变的正确磁通和取向。
必须考虑实现本发明的定时。对于通过经由电源与电动机端子之间的接触器极的3线连接所连接的Y连接和Δ连接电动机,两相在其线电压处于峰值时首先被连接,然后在四分之一周期之后连接第三相。
对于其中的接触器极处于Δ内(图8)的Δ连接电动机,一个极(例如D1)在将通过那个绕组连接的线电压(AC)的零电压之后的60°处闭合,另外两个极稍后在线电压的后续零处的120°以后闭合。现在论述本发明对Y-Δ起动器的应用。启动电动机中的主要问题之一是处理发生的严重电流峰值。Y-Δ启动中的电压降低的主要目的是在达到全速的70%与90%之间的加速周期中把启动电流减小到三分之一。在全电压上将吸取6至10倍满载电流(FLC)的Δ电动机在以Y配置连接时则仅吸取2至3.5倍FLC。但是,当电动机以Y连接时,转矩也减小到相同的三分之一。
则必须进行向Δ中的全电压操作的转变以便提供全转矩能力。然而,从降低的电压改变为全电压的不连续可能导致几个周期的严重的电流瞬变,对于高效电动机可能达到18倍FLC。这提出了设置电流保护继电器方面的一个主要问题,为了能够启动电动机,电流保护继电器可能必需设置成过高的值来提供运行期间的安全保护。另外,对于较大的电动机,这些极端瞬变可能使超出电动机自己的过载断路器的断路器跳闸,从而导致其它负载的问题。
许多因素影响电流瞬变峰值:
以Δ重新连接之后的电流的基本等级通过当电动机仅缓慢加速时将流动的电流的‘稳态’值来设置。
全电压的突然施加不可避免地在电流平缓之前产生瞬变浪涌以便使电动机加速到全速。
从Y接触器断开连接让电动机具有转子电流流过,它使电动机产生可能极大增加电流峰值的反e.m.f.。
将会表明,把POW开关用于Δ重新连接对于电流和转矩瞬变具有主要影响,并且可能使电流峰值减小高达40%。转矩脉动峰值也可极大减小。
图10所示的是采用同时接触器闭合的传统Y-Δ启动。顶部迹线表示以Y连接时减小的绕组电压。在以Δ重新闭合之后存在极大的转矩脉动,但是比图1所示的Δ中的传统DOL全电压启动时更小。顶部迹线表示以Y连接时减小的绕组电压。出现极大的转矩脉动,但是比图1所示的DOLΔ启动时更小。
图11说明与图10相同的Y-Δ启动,但允许0.1秒让定子绕组中感应的转子电流及关联反e.m.f.衰减。仍然出现极大的转矩脉动,但是Δ电流峰值比图10中更低。同时Δ重新连接仍然呈现转矩脉动和电流不平衡,但是比不允许反e.m.f.衰减时更小。
图12和图13说明相同的启动,但POW开关用于初始Y连接以及Δ重新连接。POW开关消除了Y连接的转矩脉动,但是在Δ连接上仍然存在脉动。在图13中,Δ重新连接之前的延迟允许转子电流所感应的反e.m.f.在重新连接时开始与电源相位同步,并且可看到,转矩脉动实际上被消除,其中没有负转矩瞬变,以及浪涌电流峰值也被消除。在以Δ重新连接时看到极大的脉动和电流峰值,但远比图1中的同时闭合的情况要小。图13说明,与图1和图10所示的传统启动相比,转矩脉动被极大减小,并且负转矩实际上被消除。
下表1比较用于Δ重新连接的同时和2阶段POW过程。这些值作为满载电流及相关转矩的倍数、按单位符号给出。2阶段闭合次序把瞬变峰值电流从9.2倍FLC减小到5.8倍FLC-减小37%。该表比较同时和POW开关的Δ重新连接时的电流和转矩峰值。这些值按单位符号给出。
| 同时闭合 | POW闭合 | |
| 峰值定子电流 | 9.2pu | 5.8pu |
| 负转矩 | -1.7pu | 0 |
| 峰值转矩 | 3.7pu | 3.1pu |
表1:图10和图11中的Δ重新连接的电流和转矩值
现在论述涉及采用反e.m.f.同步的POW开关的问题。
图14和图15中的电压波形表示以Δ重新连接电动机之前、Y接触器断开之后在电动机端子上可见的衰减反e.m.f.电压的前两个周期。在Δ接触器闭合以便施加全电压时,流过的电流通过作为交流量相加、考虑其相位差的电源电压与相反的反e.m.f.之和来确定。如果它们同相,则相反的反e.m.f.抵消电源电压的部分,以及所得电流是适度的。如果反e.m.f.与电源180异相°,从而产生极大的电压差,则所产生的电动机瞬变非常大-并且是实际上频繁遇到的严重瞬变电流的原因。在图14中,负载惯性极高,使得电流和转矩在Δ中保持很高。在施加全Δ电压之前,可看到电动机端子上的衰减反e.m.f.。初始定子电流峰值远远超过后来的稳态值。出现负转矩脉冲。在图15中,电动机端子上的衰减反e.m.f.与图11和图13中相同。初始定子电流峰值与后来的稳态值相当,以及负转矩脉冲被消除,并且整体脉动极大地减小。
处理反e.m.f.的两种方法对于使定子电流峰值和转矩脉动为最小是可行的。更简单的方法允许断开Y接触器与闭合Δ接触器之间的短延迟,从而允许转子电流和反e.m.f.衰减(如图11中采用同时开关通过0.1秒延迟所进行的,以及图13对于POW开关)。这因不利的反e.m.f.相角而减小了瞬变电流。对于表2中的电动机,将产生更接近平均值的值。
但是,如果测量反e.m.f.相角,在开关积极地减小电流和转矩峰值之前,等待闭合Δ接触器,直到反e.m.f.和电源电压实际上同相。它们因反e.m.f.的更低频率(如果电动机处于全速的80%,则为电源频率的80%)而在几个周期内开始彼此同相。以Δ重新连接则采用POW开关来进行。反e.m.f.则起作用以有效地减小浪涌电流并产生表2中的最小值。
在以Δ重新闭合之前等待电源与反e.m.f.之间同步的好处可在表2中看到。该表说明当反e.m.f.与电源之间的相位差以10°间隔取0°与360°度之间的值时来自重新连接的计算机模拟的测量结果。该表说明最坏、最好和平均峰值电流及转矩脉动。该表说明,在重新连接时不同步反e.m.f.和电源可能导致峰值定子电流的变化超过二倍。最好的情况是当它们同步时。
| 在80%速度的Y-Δ转变 | 同时开关 | POW开关 | ||||
| 最大值 | 最小值 | 平均值 | 最大值 | 最小值 | 平均值 | |
| 定子电流(p.u.) | 16.9 | 6.8 | 12.5 | 12.8 | 5.0 | 9.5 |
| 负转矩(p.u.) | -11.0 | 0.0 | -5.4 | -6.7 | 0.0 | -2.4 |
| 峰值转矩 | 3.8 | 3.5 | 3.7 | 3.7 | 2.6 | 3.5 |
表2:以Δ重新连接时Y-Δ起动器中对电流和转矩的影响
对于超过25种不同电动机、关联Y-Δ开关的电流峰值的研究表明,与同时开关相比,采用反e.m.f.同步的POW开关使峰值瞬变电流减小23%与41%之间,其中具有31%的平均减小。18.0倍FLC瞬变将减小到13.8与10.6倍FLC之间,它在设置断路器时不会产生问题。
现在描述POW控制器电路设计的方面。
参照图16,说明用于Y连接电动机的POW启动的接触器极S1、S2和S3的闭合的时序图。定时标记t0、t1、t2等是AB电源线电压的连续过零点。
为了通过POW开关来启动如图3和图12所示的Y连接电动机,三个接触器极S1、S2和S3必须在电源波形的精确点上以正确次序闭合。在接触器极闭合之前,电源相首先连接到电动机端子。当按下启动按钮时,A相极S1闭合。这个时间不关键,因为在至少两个极闭合之前没有电动机电流流过。由于再现性,接触器极在第一AB线电压相交(图16中的t1)处被激励。对于POW启动,B相极S2必须在任何两个过零点中间、例如t5与t6中间的AB线电压的峰值处闭合。C相极S3必须在t6正好90°之后闭合。在线圈激励之后,这要花费典型的接触器极大约数十毫秒来闭合。因此,图16中的宽箭头表示初始激励与实际极闭合(在箭头处)之间的延迟。
为了控制这个过程,必须知道触点闭合延迟,以及线S2和S3必须在某个时间被激励以便允许这个延迟,使得它们在正确瞬间闭合。整个过程必须与电源的相位同步。这可通过对于在0°、180°、360°、540°等处出现的、在图16中由定时标记t0、t1、t2、t3等表示的AB线电压的过零点进行观测和定时来进行。
这方便地通过微控制器来控制,在其中,采用以大约一微秒间隔递增的内部计时器来使软件锁相环(PLL)与电源电压交点t0、t1、t2等同步。极激励的定时则可采用计时器来计算,以便在正确瞬间闭合接触器极。图17的表表示用于控制的一种可能的软件结构中的例程。
现在将参照图17来描述该软件结构。对于电动机启动,通过启用或禁用(或者忽略)适当的例程以便仅实现DOL POW启动或者Y-Δ启动,该软件允许起动器的不同形式被配置不同的功能性。
整体定时由锁定到如图16中在时间t0、t2、t4等处每个电源周期出现的AB线电压的过零点的锁相环(PLL)中断例程来控制。
电源丢失测试被加入PLL例程,它可检测2或3个周期内的电源丢失,使得接触器可断开以便防止可能伴随电动机反e.m.f.与电源异相时返回的电源的大脉冲转矩和浪涌电流。
这将相当于采用同时开关的最坏情况重新连接。
在按下启动按钮之前,假定已经连接3相电源和控制功率(24V直流)。程序以“重置”例程开始。然后。控制转到“检验启动”例程。
程序在图18中以“重置”开始。它初始化微控制器,并启用PLL中断例程。如果连接了供电电源,则“重置”例程把控制转到“检验启动”例程,它读取启动按钮的状态。当按下启动按钮时,控制转到按照Y启动电动机。
PLL中断是每当电源过零时间(ZCT)出现并且使事件与电源的相位同步时运行的中断例程。过零点之间的电源半周期T180经过计算,使得可预测将来的过零点,例如t1=t0+T180。这使极闭合能够相对于电源的相位正确地定时。
图19所述的例程“按照Y启动电动机”根据图16来控制电动机的POW启动。它在按下启动按钮时进入。图16中的时序图表示闭合接触器极所遵循的次序。在下一个电源零的时间t1,A极被激励。然后,在t2处的过零点之后,B极被激励,使得它将在时间tb=t2+(3.180+90)°在AB线电压的峰值处闭合。由于它花费TCb来闭合触点,所以激励必须在时间tb-TCb发生。极C在tec=tc-TCc被激励,以便在时间tc=tb+90°处90°之后闭合。
当所有接触器极闭合、使得电动机完全以Y配置连接时,控制转到图19中的“电动机按照Y运行”例程。
在基本单元(仅DOL启动)的例程“电动机按照Y运行”中,当所有电动机触点闭合时,电动机加速到最快速度并继续运行。如果“检验启动/停止按钮”子例程检测到已经按下停止按钮,则通过“断开接触器和停止电动机”例程来断开接触器以便停止电动机。在启动Y连接或Δ连接电动机之间没有差别,除非接触器极设置在Δ内,它影响详细定时,如已经论述的那样。如果在“相连接测试”子例程或者在“PLL中断”例程的电源丢失测试中检测到电源故障,则也断开接触器。
对于Y-Δ起动器,电动机首先通过POW开关按照Y连接,使得当所有Y触点闭合时,电动机以Y配置加速。对于这种形式,“检验到Δ的转变”子例程添加到图19的“电动机按照Y运行”例程。这个子例程监测电动机电流和经过的启动时间,以便确定切换到Δ操作的时间。对于基本单元,对于按下的停止按钮以及对于电源丢失来进行相同的检验。
图20所述的子例程“相连接测试”测量电压以便检验电源连接以及旋转次序。
例程“断开接触器和停止电动机”断开接触器并等待大约0.25秒(随电动机规格增加),以便在返回到“重置”之前允许电动机反e.m.f.衰减,从而允许电动机重新启动。
中断例程“锁相环(PLL)”是关键例程,它建立相对于供电电源的整体定时。PLL中断例程被锁定到在时间t0、t2等每360°出现的AB线电压的正向过零点。通过这些中断,电源的周期T360是已知的,并且导出四分之一周期和二分之一周期T90、T180。它的流程图如图18所示,现在描述它的操作。
下面(在列表1中)给出每次进入中断例程时进行的PLL时间计算的伪码。
PLL时间计算:以‘T’开始的变量是时间间隔;以‘t’开始的变量是时间瞬间。时间从自由振荡计数器中读取,在这个实例中假定为以1MHz递增。在Vab过零点进入PLL例程时,执行列表1的代码,对应于图18中标记为“计算t0,t1,t2,T180”的框。
电源丢失测试:如果电源被中断,则在电动机端子上看到电动机反e.m.f.。当电动机减速时,这可通过以上代码中的过零时间误差ZCerror的立即大的增加来检测。例如,如果电动机花费20秒来减速,则与小于100甚至有线路电源上的5%噪声相比,ZCerror的连续值(单位为微秒)在功率损耗的前4个周期上大约为6000、12000、18000、24000。接触器可被断开以避免伴随反e.m.f.与电源异相时返回的电源的大脉冲转矩和涌入电流。ZCerror测量单位为微秒的相位差,并且可直接表明反e.m.f.是否在返回时与电源异相。
确定相序:相旋转次序通过在Vab过零点处测量线电压Vbc和Vca来确定。它们应当等于0.86倍峰值线电压,但具有相反的符号。旋转次序通过哪一个为正来确定,下面将进行说明。
另外两个线电压的值也在Vab电压相交时测量。Vpk是峰值线电压的值。
如果Vbc=+Vpk/2且Vca=-Vpk/2,则电源旋转次序为正常的ABC。
如果Vbc=-Vpk/2且Vca=+Vpk/2,则次序为反向的ACB。
如果次序被反向,则为了安全的原因可防止电动机启动。
用于Y-Δ启动的附加软件:为了实现Y-Δ启动,必须在加速期间进行从Y到Δ的POW转变。进行到Δ配置的转变的时间可通过计时器来确定,或者最好仍通过电流下降大约50%的时间来确定。对此的检验在“电动机按照Y运行”例程中的子例程“检验到Δ的转变”(图21)来进行,然后控制转到“到Δ的转变”例程。当电源和电动机反e.m.f.的相位同相时,电动机通过POW开关重新连接成Δ。
在例程“到Δ的转变”中,第一步骤是断开接触器极来从Y配置断开连接,以便能够以Δ重新配置电动机。
为了使重新连接时的涌入浪涌电流和转矩脉动为最小,这个子例程调用同步算法“同步反Emf和电源”,它观测在一个电动机相绕组上产生的衰减反e.m.f.的过零点,并且在采用POW开关重新连接电源之前,或者等待反e.m.f.和电源的相位变为同步,或者让这个反e.m.f.衰减到低值。同步子例程和重新连接过程在下面进行描述,并且在细节上不同于按照Y启动电动机,因为接触器极将处于Δ中。
现在进一步描述子例程“同步反Emf和电源”。图22中的反e.m.f.同步例程通过反e.m.f.电压的符号的改变,来观测定子相绕组A上的反e.m.f.电压的过零点。在每个过零点,时间间隔从最后一个电源Vab线过零电压中记录,以便计算电源与反e.m.f.之间的相移。
观测变化相移的趋势,以便预测电源和反e.m.f.将变为同相的时间,因而正确时间被计算以便激励接触极,使得接触极的POW闭合将与相位同步一致。例程“同步反Emf和电源”的伪码如以下列表2所示。
如果反e.m.f.在达到同步之前几乎完全衰减,则电动机通过POW开关以Δ重新连接而无需等待同步,因为对于实际上为零的反e.m.f.,不存在来自非同步的缺点。
当反e.m.f.同步或者几乎完全衰减时,控制则立即从例程“到Δ的转变”转到例程“按照Δ重新连接电动机”,它根据图24所示的时序图和图23的接触器配置通过POW开关来实现按照Δ的重新连接。
为了按照Δ连接电动机,如图23所示,要按照Δ操作电动机的触点M1、M2、M3最初全部断开,并且通过POW开关分两阶段闭合,如下:
第1阶段M1在Vab线电压过零之后60°度闭合,并且电流开始注入绕组A。没有电流注入绕组B和C。
第2阶段M2和M3正好在下一个Vab过零点120°之后同时闭合。电动机这时被完全连接,并按照Δ运行。
触点闭合的定时如图24所示。
然后,控制转到图25所示的例程“按照Δ运行”,在其中,连续监测停止按钮以便停止电动机。“PLL中断”例程也保持为可工作,并且通过“电源丢失”例程来检验意外的电源断电,在其中,如果电源在反e.m.f.仍然很大但与电源异相时在几分之一秒内恢复,则电动机可选地迅速断开连接以便避免巨大的电流浪涌和转矩脉冲。
除了以上主要应用之外,本发明的原理还可方便地扩展。已经参照图14和图15论述了相位同步的优点。相位同步还可有益于其它各种应用,现在进行描述。
当采用粗略速度控制的变频发电机、如风力发电机连接到固定频率电源时,在连接时出现极大的瞬变转矩峰值和脉动以及关联的浪涌电流。它们引起不希望的机械和电气应力。这两者在按照以下所述进行连接时都可极大地改进
(i)当发电机频率接近线频率时,以及
(ii)通过在电源电压的相位与发电机电压的相位接近同步的时刻采用POW 2-阶段开关实现3相连接。
在许多情况中,备用发电机用于在实用电源的中断之后提供电力。备用发电机可保持运行,或者可在断电之后启动。转换开关则用于从实用电源断开负载,然后将它连接到备用发电机。在某些情况下,需要尽快恢复电力。如果负载包括大电动机,则它们可能仍然在旋转并产生反e.m.f.。在这类情况中,通过同时闭合三相触点来把备用发电机连接到负载可能产生高峰值电流浪涌,并且触点和发电机的额定值必须考虑这一点。如果转换开关采用两阶段POW开关来操作,则可极大地减小电流浪涌。两阶段触点闭合相对于备用发电机3相电压波形来定时。如果在开关之前,负载具有极大的反e.m.f.,则通过POW开关来连接发电机的时刻应当是在电动机负载中的反e.m.f.的相位与发电机电压的相位同步时。这实现同步POW开关的全面益处,如同启动电动机和Y-Δ启动那样。
当实用电源已经恢复时,转换开关用于首先从备用发电机断开负载,然后采用POW开关重新连接到实用电源。POW开关相对于实用电源电压波形的相位来定时。如果负载具有已产生的反e.m.f.分量,则通过POW开关来连接发电机的最佳时刻同样是在负载的反e.m.f.的相位与实用电源电压的相位同步时。这实现同步POW开关的全面益处,如同启动电动机和Y-Δ启动那样。
存在可控速度发电机必须连接到恒定(线)频率电源以提供附加发电容量的情况。在这种情况中,发电机通常配备了激励控制以及通过对柴油机、涡轮机或驱动发电机的其它引擎的燃料控制进行的速度控制。发电机被控制为在连接时使其频率匹配电源的频率。电源与发电机电压波形之间的相位同步对于提供平滑连接是重要的。如果POW两阶段开关与相位同步配合使用,则可取得最小峰值电流浪涌和转矩脉动。
控制电动机的POW技术的另一个重要应用是通过反向制动进行电动机反转。在这种反转操作中,电动机首先从电源断开连接,然后与互换的到电动机的两个电源连接进行重新连接。电源则对电动机制动并以反方向对它驱动。由于电动机在重新连接时不是静止的,而是按照与电源相反的方向旋转,所以它引起强瞬变电流浪涌和转矩脉动。从图26的重新连接时来说明这种情况,其中的目标是从全速反转电动机。看到极强的转矩脉动和峰值电流。在图27中,反转采用POW两阶段技术来进行,以及重新连接的时刻被选择为在电动机反e.m.f.的瞬时相位接近电源电压的相位时。转矩脉动显著减小,并且使电动机传动系上的机械应力为最小。在图27中,第一对触点在参考相位上的60°相角处闭合,第三触点在90°之后闭合。与图26所示的传统配置相比,转矩脉动和峰值大约为一半。
大家会理解,本发明不限于三相电源,而是适用于风力发电机和备用发电机。采用反emf相位同步的POW开关不限于三相环境。
另外,本发明不限于电动机。它适用于发电机(例如风力或水力或者化石燃料动力发电机)以及适用于变压器。当考虑发电机时,对于把电源极连接到绕组的提法可解释为把电源绕组(而不是电动机绕组)连接到功率输出系统极(但是,如果发电机将构成电源电网,或者把电力加入现有的多相电源,则这仍然在其中具有多相电周期)。它仍然以正确的时间点/正确的相位点关系把极连接到绕组,但是更好地产生电力而不是更好地驱动电动机。类似意见适用于变压器。
列表1
ZCT=t %从1MHz自由振荡计数器读取
过零时间
ZCerror=ZCT-t360 %从先前预测的过零时间所计算
的过零时间误差
T360=T360+ZCerror/32 %按照电源周期T360中的变化
(具有平滑)
IF T360<12000 THEN T360= %以μs设置电源周期的最小值
12000
t0=t360+ZCerror/32 %返回的过零时间,其中的波动
经过平滑
T180=T360/2 %180度间隔
T90=T180/2 %90度间隔
t300=(ZCT+T360*5/6) %过零点之后300度的最早时
间,以便开始查找下一个过零点
t360=t0+T360 %下一个过零时间的预测时间
t90=t0+T90 %过零点之后90度的时间
t1=t0+T180 %180度负向过零时间
t2=t0+T360 %360度过零时间
列表2
REM通过Vbemf的符号的改变来检测反emf过零时间ZCT
IF Vbemf*Vbemf1<=0THEN ‘通过反emf的符号改变来检测
过零点
ZCT=t ‘存储反emf过零时间
Sph=(ZCT-t0)*DEG ‘ZCT处电源的相位并转换为度
Lag=Sph ‘计算滞后电源的相位
IF Vbemf<0 THEN Lag=Sph-180
IF Lag<0 THEN Lag=Lag+360 ‘确保0至360度范围
ZCTdiff=ZCT-ZCT2 ‘一个周期上的ZCT之间的间隔
Lagdiff=Lag-Lag2 ‘一个周期上的滞后之间的差异
IF Lagdiff<=0 THEN Lagdiff=
Lagdiff+360
REM 从Lagdiff计算转子速度
速度=360/(Lagdiff+360)
REM 计算反emf变成与电源同相的反emf过零点的数量
NZeros=(360-Lag)/Lagdiff
REM 计算反emf开始与电源同相的时间
tZero=t+NZeros*ZCTdiff
REM 查找时间tfire以激励极A而提供最接近tZero的闭合时间tA
IF Sph>180 THEN t0=t0+T180 ‘t0是最后电源过零时间
tA1=t0+T60+Nmin*T180 ‘最早可能的闭合时间
teA1=tA1-TCa ‘最早的激励时间
REM 当极A没有被激励时,查找最接近tZero的闭合时间tA
IF t<tfire OR t>tA THEN
DO WHILE tA1<tZero+T60
tfire=teA1:tA=tA1 ‘激励(点火)和闭合时间
tA1=tA1+T180 ‘对稍后闭合进行实验递增
teA1=teA1+T180 ‘以及激励时间
LOOP
END IF
ZCT2=ZCT1:ZCT1=ZCT ‘保存当前和先前的值
Lag2=Lag1:Lag1=Lag
END IF
Vbemf1=Vbemf ‘存储值
REM 测试极激励是否将在t+dt处下一个样本之前出现
IF t<tfire AND tfire<t+dt AND tfire<>0THEN
ChangeToDelta=‘true’ ‘极激励将在teA=tfire处发生,
在tA处闭合
END IF
Claims (39)
1.一种启动多相电机的方法,包括以下步骤:
在电源相位的受控点,把多个绕组中的至少一个但少于全部的绕组连接到相应的相移电源电压;以及
在步骤i进行的连接之后的受控延迟之后,把所述电机的那个或者每个其余绕组连接到相应的相移电源电压。
2.如权利要求1所述的方法,其特征在于,在步骤i中,在选择成当所述电机中的感应反电动势(e.m.f.)实质上与所述电源电压同相时出现的受控点进行连接。
3.如权利要求1所述的方法,其特征在于,还包括监测所述反e.m.f.的相位,以便确定所述反e.m.f.与所述电源电压同相的时间。
4.如以上任一权利要求所述的方法,其特征在于,所述受控延迟对应于90°或120°的相位延迟。
5.如以上任一权利要求所述的方法,其特征在于,所述绕组中的至少一个通过电气控制的单接触器极来连接。
6.如权利要求5所述的方法,其特征在于,至少一个接触器极通过开关直流电压源来连接,以便取得触点闭合的可重复且精确的定时。
7.如以上任一权利要求所述的方法,其特征在于,所述电机为三相电动机。
8.如权利要求7所述的方法,其特征在于,在从电动机绕组的Y配置转换到电动机绕组的Δ配置时执行。
9.如权利要求8所述的方法,其特征在于,从电动机绕组的Y配置到电动机绕组的Δ配置的转换在所述电动机的全工作转速的75%或以上来进行。
10.如权利要求8或9所述的方法,其特征在于,从电动机绕组的Y配置到电动机绕组的Δ配置的转换在所述Y配置中的启动电流下降到低于预定门限时或者在预定启动时间之后进行。
11.如权利要求1至6其中之一所述的方法,其特征在于,所述电机包括下列各项中的任一个或多个:风力发电机、变压器和备用发电机。
12.如权利要求11所述的方法,其特征在于,所述备用发电机连接到变压器或者连接到电机。
13.一种防止在交流电源电压丢失之后多相电机中的电流或转矩瞬变的方法,包括以下步骤:
从所述电源断开所述电机的绕组;
监测所述电机的端子上的反e.m.f.;
确定所述反e.m.f.与所述交流电源电压的模型相位之间的相位差;
当恢复的电源与所述反e.m.f.实际上同相时,连接所述交流电源电压的源与所述电机之间的至少一个绕组;以及
在受控延迟之后闭合其余接触器极。
14.如权利要求13所述的方法,其特征在于,所述电机为三相电动机。
15.一种包括多个接触器极和控制装置的多相交流电机,所述接触器极中的每个设置成连接到相应交流电源电压,所述相应交流电压中的每个相对彼此进行相移,所述控制装置设置成控制所述接触器极到其相应交流电源电压的连接,其中所述控制装置设置成在第一时间点把所述多个连接器极中的一部分而不是全部连接到其相应交流电源电压,以及在受控时间延迟之后把其余连接器极连接到其相应交流电源电压。
16.如权利要求15所述的电机,其特征在于,所述控制装置包括设置成监测反电动势和所述交流电源电压的相对相位或频率的监测部件;和/或所述控制装置适合于在所述反emf实质上与所述相应极的电源的相位同相时,把所述连接器极连接到其相应交流电源电压。
17.如权利要求15或16所述的电机,其特征在于,所述控制装置设置成在与90°或120°的相位延迟对应的受控时间延迟之后把其余接触器极连接到其相应交流电源电压。
18.如权利要求15至17中的任一项所述的电机,其特征在于,包括设置成把所述绕组中的至少一个转换成与所述交流电源电压连接以及不与所述交流电源电压连接的电动操作的开关部件。
19.如权利要求18所述的电机,其特征在于,所述开关部件由开关直流电压源操作。
20.如权利要求15至19中的任一项所述的电机,其特征在于,所述电机为三相电动机。
21.如权利要求20所述的电机,其特征在于,所述控制装置设置成控制所述电动机从电动机绕组的Y配置到电动机绕组的Δ配置的转换。
22.如权利要求21所述的电机,其特征在于,在电动机绕组的所述Δ配置中,接触器极位于电动机绕组的所述Δ配置内。
23.如权利要求21所述的电机,其特征在于,在电动机绕组的所述Δ配置中,接触器极位于电动机绕组的所述Δ配置外部。
24.如权利要求20至23中的任一项所述的电机,其特征在于,所述控制装置设置成在所述Δ配置中重新连接期间,监测电动机绕组的所述Δ配置的一个绕组中的反e.m.f.,所述绕组连接到其余极接触器中的至少一个,所述控制装置还设置成在所述反e.m.f.与将连接在那个绕组上的所述交流电源电压同相时把所述相应交流电源电压连接到所述绕组。
25.如权利要求20至23中的任一项所述的电机,其特征在于,所述电动机的电动机绕组设置成在所述电机工作的初始周期中在Y配置中连接到所述交流电源电压,以及所述电动机绕组设置成在所述电机工作的第二周期中在Δ配置中重新连接到所述交流电源电压。
26.如权利要求25所述的电机,其特征在于,所述控制装置设置成当所述电动机的转速达到全工作速度的至少75%时,从电动机绕组的Y配置转换到电动机绕组的Δ配置。
27.如权利要求25或26所述的电机,其特征在于,所述控制装置设置成当所述Y配置中的启动电流在所述电动机接近全速时或者在预定启动时间之后下降到低于预定门限时,从电动机绕组的Y配置转换到电动机绕组的Δ配置。
28.如权利要求15至27中的任一项所述的电机或者如权利要求1至14中的任一项所述的方法或者如权利要求29至32中的任一项所述的装置或者如权利要求33至35中的任一项所述的软件或者如权利要求36至39中的任一项所述的方法,其特征在于,所述电机包括以下各项中的任一项或组合:发电机、风力发电机、变压器、备用发电机、三相电动机。
29.一种适合用于多相交流电机的控制装置,所述装置设置成控制多个接触部件的断开和闭合,所述接触部件设置成有选择地使电机的绕组与多相交流电源电压电气连接,其中,所述装置设置成在受控延迟之后闭合至少第二接触部件之前闭合至少第一接触部件。
30.如权利要求29所述的控制装置,其特征在于,包括处理器,所述处理器设置成接收表示和至少第一接触部件关联的至少一个相应电源电压与来自和将被连接到所述电源电压的电机绕组关联的传感器的反e.m.f.之间的相对相位差的信号。
31.如权利要求30所述的控制装置,其特征在于,所述处理器设置成当至少一个电源电压与它将连接到的电机绕组的反e.m.f.同相时输出信号以闭合至少第一接触部件。
32.如权利要求29至31中的任一项所述的控制装置,其特征在于,所述控制装置设置成响应所述绕组电压的相位与所述电源电压的预计相位之间的表明所述电源电压丢失的显著差异而断开所述接触部件中的一个或多个。
33.在处理器上运行时使所述处理器执行以下步骤的软件:
接收表示设置成被提供给多相电机的交流电源电压的相位的第一信号;
接收表示多相交流电机的组件中的反e.m.f.的相位的第二信号;
根据第一和第二信号来确定所述反e.m.f.与所述电源电压之间的相位差;以及下列的任一个:
如果所述反e.m.f.很大,则等到所述反emf与所述电源开始同步,以所述电源中的预定相角发起两步连接过程,从而有选择地使所述电机与所述电源电压接触;或者
如果所述反e.m.f.小,则输出信号以便以所述电源中的预定相角在受控两步过程中起动接触部件,从而有选择地使所述电机与所述电源电压接触。
34.如权利要求33所述的软件,其特征在于,所述软件设置成在所述反e.m.f.与要在所述电机的元件上连接的电源电压之间的相位差实质上为零时起动所述接触部件,以便把所述元件连接到所述电源电压。
35.如权利要求30或31所述的软件,其特征在于,所述软件设置成在所述绕组上的电压与根据它的已知频率预计的电源电压的相位之间产生很大相位差时起动所述接触部件以拆除所述电机与所述电源电压的连接。
36.一种控制对多相交流电机的交流电压施加的方法,包括:
接收表示设置成被提供给所述电机的交流电源电压的相位的第一信号;
接收表示多相交流电机的组件中的反e.m.f.的相位的第二信号;
根据第一和第二信号来确定所述反e.m.f.与所述电源电压之间的相位差;根据所述确定,或者:
如果所述反emf很大,则等到所述反emf与所述电源开始同步,以所述电源中的预定相角发起两步连接过程,从而有选择地使所述电机与所述电源电压接触;或者
如果所述反emf小,则输出信号以便以所述电源中的精确相角在受控两步过程中起动接触部件,从而有选择地使所述电机与所述电源电压接触。
37.如权利要求36所述的方法,其特征在于,包括在所述绕组上的电压与根据它的已知频率预计的电源电压的相位之间产生很大相位差时,响应控制信号而起动所述接触部件以拆除所述电机与所述电源电压的连接。
38.如权利要求1至6中的任一项所述的方法,其特征在于,所述电机为风力发电机,以及所述受控时间延迟对应于一个延迟,在所述延迟之后,所述发电机e.m.f.的相位变为实质上与所述电源电压的相位同步。
39.一种有效地使电动机反转的方法,由此,在电源与已经以第一方向旋转的电动机断开连接并交换两个相连接以便能够以相反方向驱动电动机之后,所述电源到所述电动机的重新连接通过如权利要求1至6中的任一项所述的方法来进行。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GB0421443A GB0421443D0 (en) | 2004-09-27 | 2004-09-27 | Point on wave (pow) control for motor starting and switching |
| GB0421443.3 | 2004-09-27 | ||
| PCT/GB2005/003503 WO2006035194A2 (en) | 2004-09-27 | 2005-09-12 | Staged motor starting and wye/delta switching |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN101044672A true CN101044672A (zh) | 2007-09-26 |
| CN101044672B CN101044672B (zh) | 2012-08-15 |
Family
ID=33397328
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2005800324226A Expired - Fee Related CN101044672B (zh) | 2004-09-27 | 2005-09-12 | 分阶段电动机启动和y/△转换 |
Country Status (7)
| Country | Link |
|---|---|
| US (2) | US7812563B2 (zh) |
| EP (1) | EP1820259B1 (zh) |
| JP (1) | JP2008515368A (zh) |
| CN (1) | CN101044672B (zh) |
| AT (1) | ATE533226T1 (zh) |
| GB (1) | GB0421443D0 (zh) |
| WO (1) | WO2006035194A2 (zh) |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102403841A (zh) * | 2010-09-07 | 2012-04-04 | 阿尔斯通技术有限公司 | 用于接入电感负载的方法以及用于实施该方法的连接电路 |
| CN104052338A (zh) * | 2013-03-15 | 2014-09-17 | 洛克威尔自动控制技术股份有限公司 | 借助于电磁开关对电动机的两步连接 |
| CN104871423A (zh) * | 2012-12-20 | 2015-08-26 | 西门子公司 | 用于电连接逆变器与电机的方法 |
| CN105099312A (zh) * | 2014-05-19 | 2015-11-25 | 洛克威尔自动控制技术股份有限公司 | 准矢量电机控制器 |
| CN105589348A (zh) * | 2014-11-06 | 2016-05-18 | 洛克威尔自动控制技术股份有限公司 | 单极单载流路径开关系统和方法 |
| US9685898B2 (en) | 2014-05-19 | 2017-06-20 | Rockwell Automation Technologies, Inc. | Quasi vector motor controller |
| US9722513B2 (en) | 2014-11-06 | 2017-08-01 | Rockwell Automation Technologies, Inc. | Torque-based stepwise motor starting |
| US9726726B2 (en) | 2014-11-06 | 2017-08-08 | Rockwell Automation Technologies, Inc. | Single-pole, single current path switching system and method |
| US9748873B2 (en) | 2014-11-06 | 2017-08-29 | Rockwell Automation Technologies, Inc. | 5-pole based wye-delta motor starting system and method |
| US9806641B2 (en) | 2014-11-06 | 2017-10-31 | Rockwell Automation Technologies, Inc. | Detection of electric motor short circuits |
| US9806642B2 (en) | 2014-11-06 | 2017-10-31 | Rockwell Automation Technologies, Inc. | Modular multiple single-pole electromagnetic switching system and method |
| TWI607925B (zh) * | 2013-08-06 | 2017-12-11 | Mobiletron Electronics Co Ltd | Hybrid system and its operation method |
| US10074497B2 (en) | 2014-11-06 | 2018-09-11 | Rockwell Automation Technologies, Inc. | Operator coil parameter based electromagnetic switching |
| US10141143B2 (en) | 2014-11-06 | 2018-11-27 | Rockwell Automation Technologies, Inc. | Wear-balanced electromagnetic motor control switching |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7977925B2 (en) * | 2008-04-04 | 2011-07-12 | General Electric Company | Systems and methods involving starting variable speed generators |
| US20120038310A1 (en) * | 2010-08-10 | 2012-02-16 | General Electric Company | Inrush current control for a motor starter system |
| CN102403939B (zh) * | 2010-09-16 | 2014-02-05 | 晶致半导体股份有限公司 | 无感应组件的直流无刷马达驱动系统及其启动方法 |
| EP2469692B1 (en) * | 2010-12-24 | 2019-06-12 | ABB Research Ltd. | Method for controlling a converter |
| RU2543998C1 (ru) * | 2010-12-29 | 2015-03-10 | Арчелык Аноним Ширкети | Схема управления синхронным двигателем с постоянными магнитами |
| EP2670028B1 (en) * | 2011-01-27 | 2020-10-14 | Shibaura Institute of Technology | Stator teeth, stator, rotating electric machine, and method for controlling rotating electric machine |
| US20130025304A1 (en) * | 2011-07-27 | 2013-01-31 | Dorman Dennis R | Loading and unloading of compressors in a cooling system |
| BRPI1103937A2 (pt) * | 2011-09-05 | 2013-08-06 | Prates Joel Aires | circuito sincronizador comulador reversÍvel automÁtico |
| DE102012024400A1 (de) * | 2012-12-13 | 2014-06-18 | Wabco Gmbh | Verdichter zur Erzeugung von Druckluft, Druckluftversorgungsanlage, pneuma-tisches System und Verfahren zum Betrieb eines Verdichters |
| TWI470921B (zh) * | 2013-01-18 | 2015-01-21 | Mobiletron Electronics Co Ltd | Variable structure motor and its switching method |
| US9396898B2 (en) * | 2013-03-15 | 2016-07-19 | Rockwell Automation Technologies, Inc. | Multipole electromechanical switching device |
| CN103944464B (zh) * | 2014-04-02 | 2016-08-31 | 常熟市常源变压器有限公司 | 抽油机自启动永磁同步电机的补偿式稳压器 |
| US9677531B2 (en) | 2014-09-30 | 2017-06-13 | Caterpillar Inc. | Multiphase induction motor with configurable windings |
| PL3174195T3 (pl) * | 2015-11-24 | 2021-01-11 | Wöhner GmbH & Co. KG Elektrotechnische Systeme | Metoda i urządzenie do użytkowania silnika elektrycznego |
| DE102016204837A1 (de) * | 2016-03-23 | 2017-09-28 | Siemens Aktiengesellschaft | Anlaufverfahren und Motoranordnung |
| GB2549146B (en) * | 2016-04-08 | 2021-06-09 | Power Drive Efficiency Ltd | Method and apparatus for controlling three-phase electric motor |
| CN106058913B (zh) * | 2016-05-27 | 2019-07-09 | 中车株洲电力机车研究所有限公司 | 一种风力发电机组及控制方法 |
| DE102018106305B4 (de) * | 2018-03-19 | 2020-06-25 | Dr. Ing. H.C. F. Porsche Aktiengesellschaft | Wechselstromladung einer intelligenten Batterie |
| CN109713954B (zh) * | 2019-01-21 | 2023-04-28 | 蓝海智能技术(杭州)有限公司 | 一种单向无刷电机的启动方法 |
| FR3095792B1 (fr) * | 2019-05-06 | 2021-04-16 | Safran Landing Systems | Procédé de pilotage d’un système de freinage électrique et système de freinage électrique pour aéronef |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1796220A (en) * | 1929-05-21 | 1931-03-10 | Gen Electric | Starting arrangement for dynamo-electric machines |
| GB429200A (en) * | 1933-12-16 | 1935-05-27 | English Electric Co Ltd | Improved means of starting synchronous electric motors |
| US3646415A (en) * | 1970-12-16 | 1972-02-29 | Univ Iowa State Res Found Inc | System for starting induction motors with self-excitation |
| JPS5130929B1 (zh) * | 1971-03-19 | 1976-09-03 | ||
| IN157249B (zh) * | 1980-09-26 | 1986-02-15 | Nat Res Dev | |
| US4470001A (en) * | 1981-06-09 | 1984-09-04 | Cyberex, Inc. | Induction motor control |
| GB8309226D0 (en) * | 1983-04-05 | 1983-05-11 | Fairford Electronics Ltd | Start-up control method |
| US4950970A (en) * | 1983-11-04 | 1990-08-21 | Chesebrough-Pond's Inc. | Induction motor control system |
| JPS62207195A (ja) * | 1986-03-06 | 1987-09-11 | Meidensha Electric Mfg Co Ltd | 誘導電動機の再始動方法 |
| US4845594A (en) * | 1986-07-01 | 1989-07-04 | Basler Electric Company | Reclosing relay with nonvolatile memory of operations |
| US5140247A (en) * | 1988-02-05 | 1992-08-18 | Lift-Tech International, Inc. | Control system for polyphase induction machines |
| US5811946A (en) * | 1992-03-16 | 1998-09-22 | Lockheed Martin Corporation | System and method for velocity control of a D.C. Motor |
| GB2270428B (en) * | 1992-09-03 | 1996-11-20 | Yang Tai Her | Shunt type motor speed control circuit |
| US5481171A (en) * | 1994-02-07 | 1996-01-02 | James River Corporation Of Virginia | Method and apparatus for symmetrical current starting of polyphase induction motors |
| DE4420216C2 (de) * | 1994-06-06 | 1998-12-17 | Siemens Ag | Anordnung zum Übertragen von Binärsignalen über eine Signalleitung |
| US5859513A (en) * | 1998-03-13 | 1999-01-12 | General Electric Company | Starting and synchronizing system for line-start permanent magnet motor |
| US6956728B2 (en) | 2003-02-28 | 2005-10-18 | Eaton Corporation | Method and apparatus to control modular asynchronous contactors |
| US7224557B2 (en) | 2003-06-28 | 2007-05-29 | Eaton Corporation | Method and system of controlling asynchronous contactors for a multi-phase electric load |
| US7038423B2 (en) * | 2004-05-07 | 2006-05-02 | Bay Controls, Inc. | Apparatus and method for ride through for AC induction motors |
-
2004
- 2004-09-27 GB GB0421443A patent/GB0421443D0/en not_active Ceased
-
2005
- 2005-09-12 EP EP20050782834 patent/EP1820259B1/en not_active Expired - Lifetime
- 2005-09-12 AT AT05782834T patent/ATE533226T1/de active
- 2005-09-12 CN CN2005800324226A patent/CN101044672B/zh not_active Expired - Fee Related
- 2005-09-12 JP JP2007532945A patent/JP2008515368A/ja active Pending
- 2005-09-12 US US11/575,890 patent/US7812563B2/en active Active
- 2005-09-12 WO PCT/GB2005/003503 patent/WO2006035194A2/en not_active Ceased
-
2010
- 2010-08-27 US US12/869,912 patent/US8305024B2/en active Active
Cited By (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102403841A (zh) * | 2010-09-07 | 2012-04-04 | 阿尔斯通技术有限公司 | 用于接入电感负载的方法以及用于实施该方法的连接电路 |
| CN104871423A (zh) * | 2012-12-20 | 2015-08-26 | 西门子公司 | 用于电连接逆变器与电机的方法 |
| US9647598B2 (en) | 2012-12-20 | 2017-05-09 | Siemens Aktiengesellschaft | Method for electrically connecting a converter to an electrical machine |
| CN104871423B (zh) * | 2012-12-20 | 2017-06-13 | 西门子公司 | 用于电连接逆变器与电机的方法 |
| CN104052338A (zh) * | 2013-03-15 | 2014-09-17 | 洛克威尔自动控制技术股份有限公司 | 借助于电磁开关对电动机的两步连接 |
| CN109546894A (zh) * | 2013-03-15 | 2019-03-29 | 罗克韦尔自动化技术公司 | 借助于电磁开关对电动机的两步连接的方法和设备 |
| CN104052338B (zh) * | 2013-03-15 | 2018-11-16 | 罗克韦尔自动化技术公司 | 借助于电磁开关对电动机的两步连接的装置及方法 |
| TWI607925B (zh) * | 2013-08-06 | 2017-12-11 | Mobiletron Electronics Co Ltd | Hybrid system and its operation method |
| CN105099312A (zh) * | 2014-05-19 | 2015-11-25 | 洛克威尔自动控制技术股份有限公司 | 准矢量电机控制器 |
| US9685898B2 (en) | 2014-05-19 | 2017-06-20 | Rockwell Automation Technologies, Inc. | Quasi vector motor controller |
| CN105099312B (zh) * | 2014-05-19 | 2018-09-25 | 罗克韦尔自动化技术公司 | 准矢量电机控制器 |
| US9806641B2 (en) | 2014-11-06 | 2017-10-31 | Rockwell Automation Technologies, Inc. | Detection of electric motor short circuits |
| US9726726B2 (en) | 2014-11-06 | 2017-08-08 | Rockwell Automation Technologies, Inc. | Single-pole, single current path switching system and method |
| US9772381B2 (en) | 2014-11-06 | 2017-09-26 | Rockwell Automation Technologies, Inc. | Synchronized reapplication of power for driving an electric motor |
| US9748873B2 (en) | 2014-11-06 | 2017-08-29 | Rockwell Automation Technologies, Inc. | 5-pole based wye-delta motor starting system and method |
| US9806642B2 (en) | 2014-11-06 | 2017-10-31 | Rockwell Automation Technologies, Inc. | Modular multiple single-pole electromagnetic switching system and method |
| US9746521B2 (en) | 2014-11-06 | 2017-08-29 | Rockwell Automation Technologies, Inc. | 6-pole based wye-delta motor starting system and method |
| CN105589348B (zh) * | 2014-11-06 | 2018-06-29 | 罗克韦尔自动化技术公司 | 单极单载流路径开关系统和方法 |
| US10018676B2 (en) | 2014-11-06 | 2018-07-10 | Rockwell Automation Technologies, Inc. | Electromagnetic switch interlock system and method |
| US10074497B2 (en) | 2014-11-06 | 2018-09-11 | Rockwell Automation Technologies, Inc. | Operator coil parameter based electromagnetic switching |
| US9766291B2 (en) | 2014-11-06 | 2017-09-19 | Rockwell Automation Technologies Inc. | Cleaning and motor heating electromagnetic motor control switching |
| US10101393B2 (en) | 2014-11-06 | 2018-10-16 | Rockwell Automation Technologies, Inc. | Temperature-based electromagnetic switching |
| US9722513B2 (en) | 2014-11-06 | 2017-08-01 | Rockwell Automation Technologies, Inc. | Torque-based stepwise motor starting |
| US10141143B2 (en) | 2014-11-06 | 2018-11-27 | Rockwell Automation Technologies, Inc. | Wear-balanced electromagnetic motor control switching |
| US10175298B2 (en) | 2014-11-06 | 2019-01-08 | Rockwell Automation Technologies, Inc. | Wellness monitoring of electromagnetic switching devices |
| CN105589348A (zh) * | 2014-11-06 | 2016-05-18 | 洛克威尔自动控制技术股份有限公司 | 单极单载流路径开关系统和方法 |
| US10361051B2 (en) | 2014-11-06 | 2019-07-23 | Rockwell Automation Technologies, Inc. | Single pole, single current path switching system and method |
| US10393809B2 (en) | 2014-11-06 | 2019-08-27 | Rockwell Automation Technologies, Inc. | Intelligent timed electromagnetic switching |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1820259B1 (en) | 2011-11-09 |
| GB0421443D0 (en) | 2004-10-27 |
| ATE533226T1 (de) | 2011-11-15 |
| CN101044672B (zh) | 2012-08-15 |
| US20110210615A1 (en) | 2011-09-01 |
| WO2006035194A2 (en) | 2006-04-06 |
| EP1820259A2 (en) | 2007-08-22 |
| WO2006035194A3 (en) | 2006-07-20 |
| US7812563B2 (en) | 2010-10-12 |
| US20080150471A1 (en) | 2008-06-26 |
| JP2008515368A (ja) | 2008-05-08 |
| US8305024B2 (en) | 2012-11-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101044672A (zh) | 分阶段电动机启动和y/△转换 | |
| CN1278483C (zh) | 电动机控制装置 | |
| CN1237695C (zh) | 多功能复合接触器 | |
| CN1122356C (zh) | 同步电动机驱动方法、压缩机驱动方法、用于这种方法的装置和无刷电动机驱动装置 | |
| CN1279690C (zh) | 一种热电联产装置的控制系统 | |
| CN1205737C (zh) | 电机装置 | |
| CN109546894B (zh) | 借助于电磁开关对电动机的两步连接的方法和设备 | |
| CN1275381C (zh) | 无刷电动机 | |
| CN1200164C (zh) | 洗衣机 | |
| CN1784823A (zh) | 用于双馈感应发电机的控制系统 | |
| CN1190885C (zh) | 一种波形发生方法及电力变换装置 | |
| CN1086639A (zh) | 逆变器保护装置 | |
| CN1701500A (zh) | 三相功率变换装置以及功率变换装置 | |
| CN1578104A (zh) | 无传感器电机驱动装置及其驱动方法 | |
| CN1379542A (zh) | 无刷电动机的控制方法以及控制装置 | |
| CN1153552A (zh) | 致冷设备、电冰箱控制及其中使用的无刷电机启动器 | |
| CN108054055B (zh) | 机电开关装置 | |
| EP3621194B1 (en) | Synchronous machine and method for starting a synchronous machine | |
| CN1961475A (zh) | 交流电机的减速方法以及逆变器装置 | |
| CN109756157B (zh) | 一种变频软启动器切换过程冲击电流的抑制方法 | |
| CN111835018B (zh) | 基于时序混合励磁控制的同步调相机启动并网电路及控制方法 | |
| CN1968005A (zh) | 测量感应电动机角速度的方法 | |
| Das et al. | Characteristics and analysis of starting of large synchronous motors | |
| Yeh et al. | Fault tolerant operations in adjustable-speed drives and soft starters for induction motors | |
| JP7563276B2 (ja) | 電動機起動システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20120815 |
|
| CF01 | Termination of patent right due to non-payment of annual fee |