CN103268596A - 一种降低图像噪声和使颜色接近标准的方法 - Google Patents
一种降低图像噪声和使颜色接近标准的方法 Download PDFInfo
- Publication number
- CN103268596A CN103268596A CN2013102111023A CN201310211102A CN103268596A CN 103268596 A CN103268596 A CN 103268596A CN 2013102111023 A CN2013102111023 A CN 2013102111023A CN 201310211102 A CN201310211102 A CN 201310211102A CN 103268596 A CN103268596 A CN 103268596A
- Authority
- CN
- China
- Prior art keywords
- image
- coordinates
- color
- standard
- images
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

Landscapes
- Image Processing (AREA)
Abstract
本发明提供了一种降低图像噪声和使颜色接近标准的方法,在精密电子组装设备工作场景下,利用多镜头获取图像,并降低图像噪声和使颜色接近标准。该方法通过对拍摄的两幅图利用单应性矩阵进行对应点匹配,然后以一幅图像为底稿将公共区域的图像进行融合,降低图像的噪声;同时运用色彩校正矩阵的方法对整幅融合图像进行全局颜色校正,使图像的颜色更接近标准颜色。
Description
技术领域
本发明涉及精密电子组装设备的图像处理领域,具体涉及一种在精密电子组装设备工作场景下,降低图像噪声和使颜色接近标准的方法。
背景技术
经典的针对单一图像的降噪方法是空间域滤波和频率域滤波。空间域滤波是在原图上利用模板直接对像素值进行卷积运算,包括均值滤波、中值滤波、低通滤波。频率域滤波是利用傅里叶变换将原图从空间域转换到频率域,然后调整不同频率的图像系数来去除噪声,最后将图像从频率域变回空间域。此外,还有利用小波变换滤波、偏微分方程、变分法、形态学滤波等方法进行图像去噪。
实际上,针对单一图像的降噪方法会造成图像细节的丢失。
发明内容
本发明的目的在于克服现有技术的不足,提供了一种在精密电子组装设备工作场景下,用多镜头降低图像噪声和使颜色接近标准的方法。
为了实现发明目的,本发明采用的技术方案为:采用多镜头拍摄获得公共区域较大的两幅印刷电路板图像,然后以一张图像作为底稿把两图的公共区域加权合成,利用噪声的随机性来降低图像的噪声,最后通过颜色校正矩阵来使颜色接近标准。利用两图合成降低噪声的方案可以较好地保留图像的细节。
一种降低图像噪声和使颜色接近标准的方法,在精密电子组装设备工作场景下,采用多镜头拍摄获得公共区域较大的两幅印刷电路板图像,然后以其中一张图像作为底稿把两幅印刷电路板图像的公共区域加权合成,利用噪声的随机性来降低图像的噪声,最后通过颜色校正矩阵来使颜色接近标准。
上述的降低图像噪声和使颜色接近标准的方法,其特征是具体包括如下步骤:
(1)两幅图像公共区域加权融合:选择两幅印刷电路板图像中的一张图像作为底稿,利用单应性矩阵将另一张图像变换成与底稿在公共区域有对应元素的图像,然后对两幅图像的公共区域进行加权,得到新的图像,从而降低图像噪声;
(2)色彩校正:通过一个3乘3的矩阵变换,将新的图像里原有的RGB颜色空间映射到标准的RGB颜色空间,使得图像的RGB像素值更接近标准的RGB像素值。
上述步骤(1)中所拍摄的两幅印刷电路板图像为在精密电子组装设备工作场景的同一个平面上的图像;人工或自动选取同一平面上n组(不少于4组)对应点,得到对应点的坐标,利用直接线性变换算法求解出两图像对应的单应性矩阵。
上述步骤(1)中,将另一张图像变换成与所述底稿在公共区域有对应元素的图像过程中,为了提高运算速度,每16像素*16像素的方框使用单应性矩阵得到4组顶点对应点坐标(该4组对应点坐标为方框的顶点),其余对应点坐标用双线性插值的方法和已求的4组对应点坐标得到。
上述步骤(1)中,将另一张图像变换成与所述底稿在公共区域有对应元素的图像过程中,新图像的像素值要通过对应点坐标在原图获取,需利用双线性插值方法在目标点最邻近的4个坐标的像素值得到所需要的整数坐标下的像素值。
所述直接线性变换算法包括:将两组对应点坐标Xl和Xr经过 和 归一化得到Xlg和Xrg,(下标l和r分别表示左图和右图,Xl和Xr分别代表左图和右图的原始对应点坐标,Xlg和Xrg分别代表左图和右图的归一化后对应点坐标。xl和xr分别代表左图和右图的x坐标,yl和yr分别代表左图和右图的x坐标,E(xl)和E(xr)分别是左图和右图归一化前x坐标的期望,E(yl)和E(yr)是左图和右图归一化前y坐标的期望,D(xl)和D(xr)分别是左图和右图归一化前x坐标的方差,D(yl)和D(yr)分别是左图和右图归一化前y坐标的方差);利用Xi'×HXi=0整理成Ah=0得 其中hi代表3乘3单应性矩阵的第i行的转置, 将3n乘9的A矩阵(n是指对应点组数)进行奇异值分解A=UDVT,归一化后单应性矩阵Hg即为V的最后一列,反归一化的单应性矩阵
所述的双线性插值方法包括:插值按照16像素*16像素的方框逐个进行,f(1),f(2),f(3),f(4)分别指的是方框四个顶点位置的映射坐标,在每一个方框内部,利用公式f12(k,1)=(f(1)*(16-k)+f(2)*k)>>2,f23(16,k)=(f(2)*(16-k)+f(3)*k)>>2,f34(k,16)=(f(3)*(16-k)+f(4)*k)>>3,f41(1,k)=(f(4)*(16-k)+f(1)*k)>>3先插值四条边,然后利用公式f(x,y)=(f(1)*(64-x)*(64-y)+f(2)*(x)*(64-y)+f(3)*(64-x)*(y)+f(4)*x*y)>>12插值方框的内部区域;其中,下标代表待插值边的第一顶点和第二顶点的标记,k代表位于待插值边上且与该待插值边上第一个顶点距离为k-1个像素的坐标,k取值为2~15;x、y代表方框内的坐标,取值为2~15。
所述的双线性插值方法利用双线性插值方法在目标点最邻近的4个对应点坐标的像素值得到所需要的整数坐标下的像素值;利用公式f(x,y)=(f(1)*(64-x)*(64-y)+f(2)*(x)*(64-y)+f(3)*(64-x)*(y)+f(4)*x*y)>>12,f(1),f(2),f(3),f(4)分别指的是最邻近的4个坐标的像素值。
所述步骤(2)包括:只需要在该场景做一次颜色校正矩阵的求取,以后就一直使用该矩阵作为颜色校正;两个摄像机先在工作场景下拍摄24色标准调色板,调色板要在两幅图的公共区域里,然后利用步骤(1)所述的降噪方法得到合成图像。
步骤(2)中使颜色接近标准的方法包括:将合成图像上读取24个色块的5点像素平均值作为输入,调色板对应色块的标准像素值作为输出,把公式 整理成Ax=b的形式(Rin、Gin、Bin分别为输入的红色、绿色、蓝色通道矩阵的颜色值,Rin、Gin、Bin分别为标准色块的红色、绿色、蓝色通道矩阵的颜色值),得公式 (即 ),其中,ci是代表3乘3颜色校正矩阵第i行的转置,矩阵A大小为72*9,向量b的大小为72*1;利用最小二乘法x=(AT*A)-1*ATb或奇异值分解可得到所需要的变换矩阵。
与现有技术相比,本发明具有如下优点和效果:
本发明采用的多摄像头图像融合降低图像噪声可以减少经典的单一图像滤波去噪丢失细节,利用色彩校正矩阵可使颜色接近标准,有着实际的生产意义。
附图说明
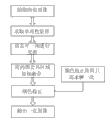
图1是本发明降低噪声和使颜色接近标准总流程图
图2是求取单应性矩阵流程
图3是将一张图像变换并与另一张图像加全合成流程图
图4是求取颜色校正矩阵流程图
具体实施方式
以下结合附图对本发明的实施作进一步说明,但本发明的实施和保护范围不限于此。
一种降低图像噪声和使颜色接近标准的方法,具体包括如下五个主要步骤:
(1)人工或自动选取同一平面上不少于4组对应点,得到对应点的坐标,利用直接线性变换算法求解出两图像对应的单应性矩阵。
直接线性变换算法:将两组对应点坐标Xl和Xr经过 和 归一化得到Xlg和Xrg,E(x)是归一化前坐标的期望,D(x)是归一化前坐标的方差。利用Xi'×HXi=0整理成Ah=0得 其中hi代表3乘3单应性矩阵的第i行的转置, 将3n乘9的A矩阵进行奇异值分解A=UDVT,归一化后单应性矩阵Hg即为V的最后一列,反归一化的单应性矩阵
(2)计算公共区域内图像的对应点,为了提高运算速度,每16像素*16像素的方框才使用单应性矩阵得到4组对应点坐标,其余对应点坐标用双线性插值的方法和4组对应点坐标得到。
双线性插值方法按照16像素*16像素的方框逐个进行,f(1),f(2),f(3),f(4)分别指的是方框四个顶点位置的映射坐标。在每一个方框内部,利用公式f12(k,1)=(f(1)*(16-k)+f(2)*k)>>2,f23(16,k)=(f(2)*(16-k)+f(3)*k)>>2,f34(k,16)=(f(3)*(16-k)+f(4)*k)>>3,f41(1,k)=(f(4)*(16-k)+f(1)*k)>>3先插值四条边,然后利用公式f(x,y)=(f(1)*(64-x)*(64-y)+f(2)*(x)*(64-y)+f(3)*(64-x)*(y)+f(4)*x*y)>>12插值方框的内部区域。下标代表方框的其中两个顶点,如下标12代表以该两个顶点为端点的待插值边的第一顶点1和第二顶点2(又如,下标41代表待插值边的第一顶点4和第二顶点1),f12(k,1)代表在以第一顶点1和第二顶点2为端点构成的待插值边上与第一顶点1的距离为k-1个像素的点的映射坐标;fab(k,1)代表在以第一顶点a和第二顶点b为端点构成的待插值边上与第一顶点a的距离为k-1个像素的点的映射坐标,k代表位于待插值边上且与该待插值边上第一个顶点a的距离为k-1个像素的坐标(k为坐标,fab(k,1)为映射坐标,坐标是在方框里建立的坐标系,映射坐标是在完整大图里建立的坐标系),取值为2~15;x、y代表方框内的坐标,取值为2~15。
(3)将另一张图像变换成与底稿在公共区域有对应元素的图像,然后将两图加权合成。新图的像素值要通过对应点坐标在原图获取,因为对应点坐标可能有小数,所以需要利用双线性插值方法在目标点最邻近的4个坐标的像素值得到所需要的整数坐标下的像素值。
利用双线性插值方法在目标点最邻近的4个对应点坐标的像素值得到所需要的整数坐标下的像素值。利用公式f(x,y)=(f(1)*(64-x)*(64-y)+f(2)*(x)*(64-y)+f(3)*(64-x)*(y)+f(4)*x*y)>>12,f(1),f(2),f(3),f(4)分别指的是最邻近的4个坐标的像素值。
(4)只在工作场景做一次颜色校正矩阵的求取,以后就一直使用该矩阵作为颜色校正。两个摄像机先在工作场景下拍摄24色标准调色板,调色板要在两幅图的公共区域里,然后利用上述步骤合成图像。
将图上读取24个色块的5点像素平均值作为输入,调色板对应色块的标准像素值作为输出,把公式 整理成Ax=b的形式,得公式 其中,ci是代表3乘3颜色校正矩阵第i行的转置,矩阵A大小为72*9,向量b的大小为72*1。利用最小二乘法x=(AT*A)-1*ATb或奇异值分解可得到所需要的变换矩阵。
(5)每一次得到的合成图像经过颜色校正得到新的图像。
如图1,为本发明的降低噪声和使颜色接近标准流程图。具体为先拍摄两张公共区域较大的贴片机工作场景图像,利用直接线性变换算法求取单应性矩阵,再求出其中一图变换后的图像,以另一图为底稿将两图加权合成,最后通过颜色校正得到最终的图像。颜色校正矩阵只需要进行一次求解就能得到。
如图2所示为求解单应性矩阵流程图。第一步是通过自动或人工选取不少于4组对应点,对应点最好能够均匀分布在图像各部分;第二步是将对应点进行归一化,为了提高求解单应性矩阵的精度;第三步是利用奇异值分解得到归一化后的单应性矩阵;第四步是对上一步的矩阵进行反归一化,得到原有对应坐标的单应性矩阵。
如图3所示为将一张图像变换并与另一张图像加全合成流程图。第一步是将图像划分成多个16像素*16像素的方框,利用单应性矩阵算出所有方框4个角的对应点坐标;第二步是利用双线性插值的方法求取公共区域所有对应点坐标;第三步是利用对应点坐标和双线性插值得到其中一图变换后的图像;第四步是以另一张图像为底稿,将公共区域图像加权合成,得到降噪的图像。
如图4所示对求取颜色校正矩阵流程图。第一步是先拍摄在公共区域有调色板的两张图像;第二步是用上述方法将两图像加权合成;第三步是把合成图像24个色块的RGB像素值作为输入,其中每个色块取5点的平均值,把调色板的标准RGB像素值作为输出;第四步是利用最小二乘法或奇异值分解得到颜色校正矩阵。
本实例在明亮的环境下拍摄工作内容的图像作为标准,然后在稍暗(即噪声较多)的环境下获取相同的图像和调色板的图像,并使用本方法进行处理。
噪声的评价函数为: 其中,s和t分别代表标准无噪图像和有噪图像,上标i=1,2,…,N,N是图像道。若MSE越小,则噪声越小。
颜色标准程度的评价函数为: 其中,R、G、B分别代表图像的三个通道,下标in和out分别代表标准值和待检测值,上标j代表第j个色块,m代表颜色块的总数,此处取24。若q越小,颜色更接近标准。
本实例中原始拍摄调色板图像的颜色标准程度为17171.4,用PS调整得到的标准调色板图像(颜色标准程度为0),用所求颜色校正矩阵进行校正得到的调色板图像(颜色标准程度为5618.4),说明颜色更接近标准。
实例中所拍摄的左图的MSE为7463.9,拍摄的右图的MSE为4433.5,合成的降噪图像的MSE为1338.5。
Claims (9)
1.一种降低图像噪声和使颜色接近标准的方法,其特征是在精密电子组装设备工作场景下,采用多镜头拍摄获得公共区域较大的两幅印刷电路板图像,然后以其中一张图像作为底稿把两幅印刷电路板图像的公共区域加权合成,利用噪声的随机性来降低图像的噪声,最后通过颜色校正矩阵来使图像颜色更接近标准颜色。
2.根据权利要求1所述的降低图像噪声和提高颜色清晰度的方法,其特征是具体包括如下步骤:
(1)两幅图像公共区域加权融合:选择两幅印刷电路板图像中的一张图像作为底稿,利用单应性矩阵将另一张图像变换成与底稿在公共区域有对应元素的图像,然后对两幅图像的公共区域进行加权,得到新的图像,从而降低图像噪声;
(2)色彩校正:通过一个3乘3的矩阵变换,将新的图像里原有的RGB颜色空间映射到标准的RGB颜色空间,使得图像的RGB像素值更接近标准的RGB像素值。
3.根据权利要求2所述的降低图像噪声和使颜色接近标准的方法,其特征在于步骤(1)中所拍摄的两幅印刷电路板图像为在精密电子组装设备工作场景的同一个平面上的图像;人工或自动选取同一平面上n组对应点,得到对应点的坐标,利用直接线性变换算法求解出两图像对应的单应性矩阵,n≥4。
4.根据权利要求2所述的降低图像噪声和使颜色接近标准的方法,其特征在于步骤(1)中,将另一张图像变换成与所述底稿在公共区域有对应元素的图像过程中,为了提高运算速度,将图像画分多个16像素*16像素的方框,每16像素*16像素的方框使用单应性矩阵得到4组方框顶点对应点坐标,其余对应点坐标用双线性插值的方法和已求的4组对应点坐标得到。
5.根据权利要求2所述的降低图像噪声和使颜色接近标准的方法,其特征在于所述步骤(1)中,将另一张图像变换成与所述底稿在公共区域有对应元素的图像过程中,新图像的像素值要通过对应点坐标在原图获取,需利用双线性插值方法在目标点最邻近的4个坐标的像素值得到所需要的整数坐标下的像素值。
6.根据权利要求3所述的降低图像噪声和使颜色接近标准的方法,其特征在于所述直接线性变换算法包括:将两组对应点坐标Xl和Xr经过 和 归一化得到Xlg和Xrg,其中下标l和r分别表示所拍摄的左图和右图,Xl和Xr分别代表左图和右图的原始对应点坐标,Xlg和Xrg分别代表左图和右图的归一化后对应点坐标;xl和xr分别代表左图和右图的x坐标,yl和yr分别代表左图和右图的x坐标,E(xl)和E(xr)分别是左图和右图归一化前x坐标的期望,E(yl)和E(yr)是左图和右图归一化前y坐标的期望,D(xl)和D(xr)分别是左图和右图归一化前x坐标的方差,D(yl)和D(yr)分别是左图和右图归一化前y坐标的方差;利用Xi'×HXi=0整理成Ah=0得 其中hi代表3乘3单应性矩阵的第i行的转置, 将3n乘9的A矩阵,n是指对应点组数,进行奇异值分解A=UDVT,归一化后单应性矩阵Hg即为V的最后一列,反归一化的单应性矩阵
7.根据权利要求4或5所述的降低图像噪声和使颜色接近标准的方法,其特征在于所述的双线性插值方法包括:插值按照16像素*16像素的方框逐个进行,f(1),f(2),f(3),f(4)分别顺次指的是方框四个顶点位置的映射坐标,在每一个方框内部,利用公式f12(k,1)=(f(1)*(16-k)+f(2)*k)>>2,f23(16,k)=(f(2)*(16-k)+f(3)*k)>>2,f34(k,16)=(f(3)*(16-k)+f(4)*k)>>3,f41(1,k)=(f(4)*(16-k)+f(1)*k)>>3先插值四条边,然后利用公式f(x,y)=(f(1)*(64-x)*(64-y)+f(2)*(x)*(64-y)+f(3)*(64-x)*(y)+f(4)*x*y)>>12插值方框的内部区域;其中,下标代表待插值边的第一顶点和第二顶点的标记,k代表位于待插值边上且与该待插值边上第一个顶点距离为k-1个像素的坐标,k取值为2~15;x、y代表方框内的坐标,取值为2~15。
8.根据权利要求4或5所述的降低图像噪声和使颜色接近标准的方法,其特征在于所述的双线性插值方法利用双线性插值方法在目标点最邻近的4个对应点坐标的像素值得到所需要的整数坐标下的像素值;利用公式f(x,y)=(f(1)*(64-x)*(64-y)+f(2)*(x)*(64-y)+f(3)*(64-x)*(y)+f(4)*x*y)>>12,f(1),f(2),f(3),f(4)分别指的是最邻近的4个坐标的像素值。
9.根据权利要求2所述的降低图像噪声和使颜色接近标准的方法,其特征在于,其特征在于所述步骤(2)中,只需要在该场景做一次颜色校正矩阵的求取,以后就一直使用该矩阵作为颜色校正;两个摄像机先在工作场景下拍摄24色标准调色板,调色板要在两幅图的公共区域里,然后利用步骤(1)所述的降噪方法得到合成图像。10、根据权利要求2所述的降低图像噪声和提高颜色清晰度的方法,其特征在于步骤(2)中提高颜色清晰度的方法包括:将合成图像上读取24个色块的5点像素平均值作为输入,调色板对应色块的标准像素值作为输出,把公式 整理成Ax=b的形式,其中Rin、Gin、Bin分别为输入的红色、绿色、蓝色通道矩阵的颜色值,Rin、Gin、Bin分别为标准色块的红色、绿色、蓝色通道矩阵的颜色值),得公式 即 其中,ci是代表3乘3颜色校正矩阵第i行的转置,矩阵A大小为72*9,向量b的大小为72*1;利用最小二乘法x=(AT*A)-1*ATb或奇异值分解可得到所需要的变换矩阵。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201310211102.3A CN103268596B (zh) | 2013-05-30 | 2013-05-30 | 一种降低图像噪声和使颜色接近标准的方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201310211102.3A CN103268596B (zh) | 2013-05-30 | 2013-05-30 | 一种降低图像噪声和使颜色接近标准的方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN103268596A true CN103268596A (zh) | 2013-08-28 |
| CN103268596B CN103268596B (zh) | 2017-04-05 |
Family
ID=49012223
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201310211102.3A Expired - Fee Related CN103268596B (zh) | 2013-05-30 | 2013-05-30 | 一种降低图像噪声和使颜色接近标准的方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN103268596B (zh) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104394308A (zh) * | 2014-11-28 | 2015-03-04 | 广东欧珀移动通信有限公司 | 双摄像头以不同视角拍照的方法和终端 |
| WO2015172366A1 (zh) * | 2014-05-15 | 2015-11-19 | 华为技术有限公司 | 用于多帧降噪的方法和终端 |
| CN106097249A (zh) * | 2016-06-21 | 2016-11-09 | 中国科学院电子学研究所 | 一种合成孔径雷达图像融合拼接方法及装置 |
| CN106131527A (zh) * | 2016-07-26 | 2016-11-16 | 深圳众思科技有限公司 | 双摄像头颜色同步方法、装置及终端 |
| CN106774386A (zh) * | 2016-12-06 | 2017-05-31 | 杭州灵目科技有限公司 | 基于多尺度标识物的无人机视觉导航降落系统 |
| CN107240064A (zh) * | 2016-03-28 | 2017-10-10 | 展讯通信(天津)有限公司 | 图像校正方法、装置及终端 |
| CN109416830A (zh) * | 2016-07-08 | 2019-03-01 | 深圳市大疆创新科技有限公司 | 用于图像处理的系统和方法 |
| CN109462748A (zh) * | 2018-12-21 | 2019-03-12 | 福州大学 | 一种基于单应性矩阵的立体视频颜色校正算法 |
| CN114303168A (zh) * | 2019-08-30 | 2022-04-08 | 松下知识产权经营株式会社 | 应力解析装置 |
| CN118071752A (zh) * | 2024-04-24 | 2024-05-24 | 中铁电气化局集团有限公司 | 一种接触网检测方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1417745A (zh) * | 2001-11-07 | 2003-05-14 | 富士施乐株式会社 | 图像处理设备和程序 |
| CN101102397A (zh) * | 2006-07-03 | 2008-01-09 | 索尼株式会社 | 噪声抑制方法和噪声抑制装置 |
| CN102682440A (zh) * | 2011-02-18 | 2012-09-19 | 佳能株式会社 | 图像处理设备、摄像设备和图像处理方法 |
-
2013
- 2013-05-30 CN CN201310211102.3A patent/CN103268596B/zh not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1417745A (zh) * | 2001-11-07 | 2003-05-14 | 富士施乐株式会社 | 图像处理设备和程序 |
| CN101102397A (zh) * | 2006-07-03 | 2008-01-09 | 索尼株式会社 | 噪声抑制方法和噪声抑制装置 |
| CN102682440A (zh) * | 2011-02-18 | 2012-09-19 | 佳能株式会社 | 图像处理设备、摄像设备和图像处理方法 |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10257450B2 (en) | 2014-05-15 | 2019-04-09 | Huawei Technologies Co., Ltd. | Multi-frame noise reduction method, and terminal |
| WO2015172366A1 (zh) * | 2014-05-15 | 2015-11-19 | 华为技术有限公司 | 用于多帧降噪的方法和终端 |
| CN105556935A (zh) * | 2014-05-15 | 2016-05-04 | 华为技术有限公司 | 用于多帧降噪的方法和终端 |
| CN105556935B (zh) * | 2014-05-15 | 2019-04-19 | 华为技术有限公司 | 用于多帧降噪的方法和终端 |
| CN104394308A (zh) * | 2014-11-28 | 2015-03-04 | 广东欧珀移动通信有限公司 | 双摄像头以不同视角拍照的方法和终端 |
| CN104394308B (zh) * | 2014-11-28 | 2017-11-07 | 广东欧珀移动通信有限公司 | 双摄像头以不同视角拍照的方法和终端 |
| CN107240064A (zh) * | 2016-03-28 | 2017-10-10 | 展讯通信(天津)有限公司 | 图像校正方法、装置及终端 |
| CN106097249A (zh) * | 2016-06-21 | 2016-11-09 | 中国科学院电子学研究所 | 一种合成孔径雷达图像融合拼接方法及装置 |
| CN106097249B (zh) * | 2016-06-21 | 2019-09-17 | 中国科学院电子学研究所 | 一种合成孔径雷达图像融合拼接方法及装置 |
| CN109416830A (zh) * | 2016-07-08 | 2019-03-01 | 深圳市大疆创新科技有限公司 | 用于图像处理的系统和方法 |
| CN106131527A (zh) * | 2016-07-26 | 2016-11-16 | 深圳众思科技有限公司 | 双摄像头颜色同步方法、装置及终端 |
| CN106774386B (zh) * | 2016-12-06 | 2019-08-13 | 杭州灵目科技有限公司 | 基于多尺度标识物的无人机视觉导航降落系统 |
| CN106774386A (zh) * | 2016-12-06 | 2017-05-31 | 杭州灵目科技有限公司 | 基于多尺度标识物的无人机视觉导航降落系统 |
| CN109462748A (zh) * | 2018-12-21 | 2019-03-12 | 福州大学 | 一种基于单应性矩阵的立体视频颜色校正算法 |
| CN114303168A (zh) * | 2019-08-30 | 2022-04-08 | 松下知识产权经营株式会社 | 应力解析装置 |
| EP4006532A4 (en) * | 2019-08-30 | 2023-02-01 | Panasonic Intellectual Property Management Co., Ltd. | STRESS ANALYSIS DEVICE |
| US12073549B2 (en) | 2019-08-30 | 2024-08-27 | Panasonic Intellectual Property Management Co., Ltd. | Stress analysis device |
| CN118071752A (zh) * | 2024-04-24 | 2024-05-24 | 中铁电气化局集团有限公司 | 一种接触网检测方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN103268596B (zh) | 2017-04-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103268596B (zh) | 一种降低图像噪声和使颜色接近标准的方法 | |
| TWI455062B (zh) | 三維視訊內容產生方法 | |
| CN109978774B (zh) | 多帧连续等曝光图像的去噪融合方法及装置 | |
| US10902558B2 (en) | Multiscale denoising of raw images with noise estimation | |
| CN102663719B (zh) | 基于非局部均值的Bayer型CFA图像去马赛克方法 | |
| CN103871041B (zh) | 基于认知正则化参数构建的图像超分辨率重构方法 | |
| US20050276504A1 (en) | Image clean-up and pre-coding | |
| TWI557686B (zh) | 校正影像色偏之方法與相關裝置 | |
| JP5822157B2 (ja) | ノイズ低減装置、ノイズ低減方法及びプログラム | |
| CN108805839A (zh) | 基于卷积神经网络的联合估计图像去雾方法 | |
| CN102982513A (zh) | 一种基于纹理的自适应图像去雾方法 | |
| CN110517206B (zh) | 彩色摩尔纹消除方法及装置 | |
| CN103595981A (zh) | 基于非局部低秩的色彩滤波阵列图像去马赛克方法 | |
| CN102663703B (zh) | 基于Treelet的Bayer型CFA图像去噪方法 | |
| CN103248909A (zh) | 平面视频转化为立体视频的方法及系统 | |
| CN104751416A (zh) | 一种图像去噪的方法、装置及图像处理系统 | |
| CN111226256A (zh) | 用于图像动态范围调整的系统和方法 | |
| CN106375675A (zh) | 一种航空相机多曝光图像融合方法 | |
| CN105678718B (zh) | 图像去噪方法和装置 | |
| CN114018214A (zh) | 一种基于硬件加速系统的标志物双目亚像素测距方法 | |
| CN110332991A (zh) | 一种光谱的重构方法、装置和电子设备 | |
| Zhou et al. | Raw bayer pattern image synthesis for computer vision-oriented image signal processing pipeline design | |
| CN104143203A (zh) | 一种图像编辑传播方法 | |
| CN114170097B (zh) | 基于大气散射模型的低照度图像和视频增强方法、装置 | |
| CN109089100B (zh) | 一种双目立体视频的合成方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20170405 |
|
| CF01 | Termination of patent right due to non-payment of annual fee |