CN103670801A - A Redundancy Pump Control Servo Mechanism for Thrust Vector Control of Liquid Oxygen Kerosene Engine - Google Patents
A Redundancy Pump Control Servo Mechanism for Thrust Vector Control of Liquid Oxygen Kerosene Engine Download PDFInfo
- Publication number
- CN103670801A CN103670801A CN201210329946.3A CN201210329946A CN103670801A CN 103670801 A CN103670801 A CN 103670801A CN 201210329946 A CN201210329946 A CN 201210329946A CN 103670801 A CN103670801 A CN 103670801A
- Authority
- CN
- China
- Prior art keywords
- control
- servo
- pump
- motor
- liquid oxygen
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Landscapes
- Fluid-Pressure Circuits (AREA)
Abstract
Description
技术领域 technical field
本发明属于伺服机构,具体涉及一种液氧煤油发动机推力矢量控制用多余度泵控伺服机构。The invention belongs to a servo mechanism, in particular to a redundant pump control servo mechanism for thrust vector control of a liquid oxygen kerosene engine.
背景技术 Background technique
伺服机构是我国对运载火箭飞行控制执行机构子系统的统称,典型应用是摇摆发动机实施推力矢量控制。液氧煤油发动机以液氧和煤油为燃料,具备无毒、无污染、高性价比和使用维护方便等优点,是目前世界上的一种主流运载火箭发动机,并可能用于载人。相应地,摇摆液氧煤油发动机的伺服机构也是必备箭上设备。由于功率较大(千瓦至数十千瓦级),如何解决其能源问题成为此类伺服机构技术方案的一个关键问题;另一方面,如用于载人运载火箭,伺服机构可靠性指标要求又特别高,可靠性设计成为关键问题。Servo mechanism is a general term for the flight control actuator subsystem of the launch vehicle in my country. The typical application is the thrust vector control of the swing engine. The liquid oxygen kerosene engine uses liquid oxygen and kerosene as fuel. It has the advantages of non-toxicity, pollution-free, high cost performance, and convenient use and maintenance. It is currently a mainstream launch vehicle engine in the world and may be used to carry people. Correspondingly, the servo mechanism of the swing liquid oxygen kerosene engine is also a necessary equipment. Due to the large power (kilowatts to tens of kilowatts), how to solve its energy problem has become a key issue in this type of servo mechanism technical solution; High, reliability design becomes a key issue.
伺服机构可以划分为两个基本组成部分:伺服能源和伺服控制。伺服能源解决如何获得能源的问题,并将其转化成可提供给伺服使用的能源;伺服控制解决将作动器如何摇摆发动机跟随电子指令运动的问题。由于功率较大,主流方案仍然是液压能源和电液控制方案。Servo mechanisms can be divided into two basic components: servo power and servo control. Servo energy solves the problem of how to obtain energy and convert it into energy that can be provided to the servo; servo control solves the problem of how the actuator swings the motor to follow the electronic command movement. Due to the large power, the mainstream solution is still the hydraulic energy and electro-hydraulic control solution.
国外此类典型的伺服能源方案主要有:美国Atlas Ⅱ系列火箭,采用MA-5A液氧煤油发动机,其涡轮泵齿轮减速箱伸出一根传动轴驱动伺服机构上的液压泵。美国Satun Ⅴ火箭采用F1液氧煤油发动机,Falcon系列火箭采用Merlin系列液氧煤油发动机,俄罗斯的Energia和Zenith系列火箭以及美国的AtasⅢ系列和Atas Ⅴ系列火箭均采用俄罗斯的RD170/180系列液氧煤油发动机,其伺服机构均采用引流发动机燃料泵后高压煤油直接驱动作动器的方案,以最大限度地简化发动机和伺服机构设计,简称“直接引流式”液压能源方案(如图1所示)。我国近年来已开展了液氧煤油运载火箭伺服机构的研制工作,有采用“直接引流式”的液压能源方案,并且在此基础上研制了“液动机式”液压能源方案(如图2所示)。对于伺服控制,这些伺服机构均采用传统的电液伺服阀控制方案。在可靠性设计方面,目前主要在伺服机构的电液伺服阀前置级、作动器位移反馈测量传感器和控制器三个方面采取冗余设计的措施,以及液压能源的并联冗余设计。Such typical servo energy solutions in foreign countries mainly include: American Atlas II series rockets, which use MA-5A liquid oxygen kerosene engine, and a transmission shaft drives the hydraulic pump on the servo mechanism from its turbo pump gear reducer. American Satun V rockets use F1 liquid oxygen kerosene engines, Falcon series rockets use Merlin series liquid oxygen kerosene engines, Russian Energia and Zenith series rockets, and American Atas III series and Atas V series rockets all use Russian RD170/180 series liquid oxygen kerosene engines The engine and its servo mechanism adopt the scheme of directly driving the actuator with high-pressure kerosene behind the engine fuel pump to simplify the design of the engine and servo mechanism to the greatest extent, referred to as the "direct drainage" hydraulic energy solution (as shown in Figure 1). In recent years, my country has carried out the research and development of the servo mechanism of the liquid oxygen kerosene carrier rocket, and has adopted the "direct drainage" hydraulic energy scheme, and developed a "hydraulic motor" hydraulic energy scheme on this basis (as shown in Figure 2 ). For servo control, these servo mechanisms all adopt the traditional electro-hydraulic servo valve control scheme. In terms of reliability design, at present, redundant design measures are mainly taken in the three aspects of the electro-hydraulic servo valve pre-stage of the servo mechanism, the actuator displacement feedback measurement sensor and the controller, and the parallel redundant design of the hydraulic energy source.
发明内容 Contents of the invention
本发明的目的是提供一种液氧煤油发动机推力矢量控制用多余度泵控伺服机构。The object of the present invention is to provide a redundant pump control servo mechanism for thrust vector control of a liquid oxygen kerosene engine.
本发明是这样实现的:一种液氧煤油发动机推力矢量控制用多余度泵控伺服机构,包括The present invention is achieved in this way: a kind of liquid oxygen kerosene engine thrust vector control uses redundant degree pump control servomechanism, comprises
液压作动器,输出往复运动,Hydraulic actuator, output reciprocating motion,
动力控制单元,将从发动机引流的高压煤油转化为液压作动器动作,The power control unit converts the high-pressure kerosene drained from the engine into hydraulic actuator action,
隔离阀,用于切换出现故障的动力控制单元,Isolation valve for switching the failed power control unit,
电机驱动器,用于动力控制单元内的伺服泵中的伺服电机驱动控制,同时还用于隔离阀的控制,The motor driver is used for the servo motor drive control in the servo pump in the power control unit, and is also used for the control of the isolation valve,
伺服控制器,用于液压作动器位置闭环和控制特性补偿,Servo controller for hydraulic actuator position closed loop and control characteristic compensation,
位移传感器,用于探测液压作动器的位置并将探测结果输出给四冗余伺服控制器。The displacement sensor is used to detect the position of the hydraulic actuator and output the detection result to the quad redundant servo controller.
如上所述的一种液氧煤油发动机推力矢量控制用多余度泵控伺服机构,其中,所述的动力控制单元包括与外部连通的液动机,该液动机将从发动机引流的高压煤油转化为机械动力,驱动伺服泵产生可控液压动力,控制作动器的双向运动。A liquid oxygen kerosene engine thrust vector control redundant pump control servo mechanism as described above, wherein the power control unit includes a hydraulic motor connected to the outside, the hydraulic motor converts the high-pressure kerosene drained from the engine into a mechanical The power drives the servo pump to generate controllable hydraulic power to control the bidirectional movement of the actuator.
如上所述的一种液氧煤油发动机推力矢量控制用多余度泵控伺服机构,其中,液动机的两端分别与高油滤、和低油滤连通,在油流动的过程中液动机被油带动而转动,继而带动与液动机同轴连接的超越离合器、和电机转动,电机的转动被传送到伺服泵中,其中,电机用于地面测试时,由超越离合器实现液动机和电机的机械脱离。A liquid oxygen kerosene engine thrust vector control as described above uses a redundant pump control servo mechanism, wherein the two ends of the hydraulic motor are connected to the high oil filter and the low oil filter respectively, and the hydraulic motor is driven by the oil filter during the oil flow process. Drive and rotate, and then drive the overrunning clutch coaxially connected with the hydraulic motor and the motor to rotate, and the rotation of the motor is transmitted to the servo pump. When the motor is used for ground testing, the mechanical separation of the hydraulic motor and the motor is realized by the overrunning clutch .
如上所述的一种液氧煤油发动机推力矢量控制用多余度泵控伺服机构,其中,伺服泵构成包括双向变量柱塞泵和变量斜盘控制用伺服电机,变量斜盘控制用伺服电机接收来自外部的控制信号,控制信号通过控制变量斜盘摆角大小和方向,从而改变双向变量柱塞泵的输出流量大小和方向,实现作动器的往复运动控制。双向变量柱塞泵在变量斜盘控制用伺服电机的驱动下通过上单向阀或下单向阀将油从油箱中抽出,进入油路循环。A liquid oxygen kerosene engine thrust vector control as described above uses a redundant pump control servo mechanism, wherein the servo pump consists of a two-way variable plunger pump and a servo motor for variable swash plate control, and the servo motor for variable swash plate control receives signals from External control signal, the control signal controls the size and direction of the swing angle of the variable swash plate, thereby changing the size and direction of the output flow of the bidirectional variable piston pump, and realizing the reciprocating motion control of the actuator. The two-way variable-variable plunger pump is driven by the servo motor for variable-variable swash plate control, and the oil is pumped out from the oil tank through the upper check valve or the lower check valve, and enters the oil circuit for circulation.
如上所述的一种液氧煤油发动机推力矢量控制用多余度泵控伺服机构,其中,隔离阀采用两位四通电磁阀。A redundant pump control servo mechanism for thrust vector control of a liquid oxygen kerosene engine as described above, wherein the isolation valve adopts a two-position four-way solenoid valve.
如上所述的一种液氧煤油发动机推力矢量控制用多余度泵控伺服机构,其中,将动力控制单元与液压作动器集成设计,动力控制单元安装在作动器一端的四周。The above-mentioned redundant pump control servo mechanism for thrust vector control of liquid oxygen kerosene engine, wherein the power control unit is integrated with the hydraulic actuator, and the power control unit is installed around one end of the actuator.
本发明显著的有益效果是:本发明提出一种液氧煤油发动机推力矢量控制用采用液动机驱动的多余度(指2~4余度)泵控伺服机构创新方案。多余度实质上包含变量泵及其控制、液动机驱动、作动器位移反馈、作动器位置闭环控制、故障切换模块在内的环节采用冗余设计,可在此基础上实现故障管理和切换,实现“伺服机构能源和控制的故障容错能力”,达到高可靠性能指标,显著降低伺服机构动力元件的功率水平要求和研制难度,特别适用于大推力液氧煤油发动机推力矢量控制所需的大功率高可靠伺服机构。The obvious beneficial effects of the present invention are: the present invention proposes an innovative scheme of a liquid oxygen kerosene engine thrust vector control using a redundant degree (referring to 2 to 4 degrees) pump control servo mechanism driven by a hydraulic motor. Redundancy essentially includes the variable pump and its control, hydraulic motor drive, actuator displacement feedback, actuator position closed-loop control, and fault switching modules. Redundant design is adopted for the links, and fault management and switching can be realized on this basis , realize the "fault tolerance of servo mechanism energy and control", achieve high reliability performance indicators, significantly reduce the power level requirements and development difficulties of servo mechanism power components, and are especially suitable for large thrust vector control of liquid oxygen kerosene engines. High power and reliable servo mechanism.
附图说明 Description of drawings
图1直接引流式的电液伺服阀控制方案原理图;Fig. 1 Schematic diagram of direct drainage electro-hydraulic servo valve control scheme;
图2液动机式的电液伺服阀控制方案原理图;Fig. 2 Schematic diagram of the control scheme of the electro-hydraulic servo valve with hydraulic motor;
图3本发明基本构成方框图;Figure 3 is a block diagram of the basic structure of the present invention;
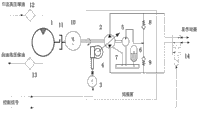
图4本发明的动力控制单元和隔离阀原理图;Fig. 4 schematic diagram of power control unit and isolation valve of the present invention;
图5本发明的伺服机构总体布局简图。Fig. 5 is a schematic diagram of the overall layout of the servo mechanism of the present invention.
图中:1.液动机、2.双向变量柱塞泵、3.变量斜盘控制用伺服电机、4.减速器、5.补油泵、6.增压机构、7.油箱、8.上单向阀、9.下单向阀、10.电机、11.超越离合器、12.高油滤、13.低油滤、14.隔离阀。In the figure: 1. Hydraulic motor, 2. Two-way variable plunger pump, 3. Servo motor for variable variable swash plate control, 4. Reducer, 5. Charge pump, 6. Booster mechanism, 7. Fuel tank, 8. Top order Directional valve, 9. Lower one-way valve, 10. Motor, 11. Overrunning clutch, 12. High oil filter, 13. Low oil filter, 14. Isolation valve.
具体实施方式Detailed ways
如附图3所示,本发明的基本构成包括:四冗余伺服控制器、四冗余电机驱动器、四套动力控制单元、四套隔离阀和液压作动器,液压作动器内含四余度位移传感器。As shown in Figure 3, the basic composition of the present invention includes: four redundant servo controllers, four redundant motor drivers, four sets of power control units, four sets of isolation valves and hydraulic actuators, the hydraulic actuators contain four Spare displacement sensor.
四冗余伺服控制器用于液压作动器位置闭环和控制特性补偿。四冗余电机驱动器用于伺服泵内的伺服电机驱动控制,同时还可用于隔离阀的控制。液压作动器在四冗余伺服控制器的控制下动作,四余度位移传感器用于探测液压作动器的动作并将探测结果输出给四冗余伺服控制器。Quad redundant servo controllers are used for hydraulic actuator position closed loop and control characteristic compensation. The four redundant motor drivers are used for the servo motor drive control in the servo pump, and can also be used for the control of the isolation valve. The hydraulic actuator moves under the control of the four-redundant servo controller, and the four-redundant displacement sensor is used to detect the action of the hydraulic actuator and output the detection result to the four-redundant servo controller.
如图4所示,高压油依次流过高油滤12、液动机1和低油滤13。液动机1将从发动机引流的高压煤油转化为机械动力,驱动伺服泵产生可控液压动力,控制作动器的双向运动。具体的说,在油流动的过程中液动机1被油带动而转动,继而带动与液动机1同轴连接的超越离合器11和电机10转动。电机10的转动被传送到伺服泵中。As shown in Figure 4, the high pressure oil flows through the high oil filter 12, the
伺服泵可以采用现有技术中的伺服泵,也可以采用如下所述的伺服泵。本例中的伺服泵构成包括双向变量柱塞泵2、变量斜盘控制用伺服电机3和减速器4、补油泵5、增压机构6(本例采用蓄能器)、油箱7、上单向阀8和下单向阀9。变量斜盘控制用伺服电机3接收来自外部的控制信号,控制信号通过控制变量斜盘摆角大小和方向,从而改变双向变量柱塞泵2的输出流量大小和方向,实现作动器的往复运动控制。双向变量柱塞泵2在变量斜盘控制用伺服电机3的驱动下通过上单向阀8或下单向阀9将油从油箱7中抽出,进入油路循环,为了解决油路压力不够的情况可以在油箱7中增加增压机构6。The servo pump can be a servo pump in the prior art, or a servo pump as described below. The servo pump in this example consists of two-way
隔离阀14采用两位四通电磁阀。动力控制单元出现故障时,可切换至另一个位置,沟通伺服泵的两个控制油口,隔离其对作动器的影响。故障管理的实现方式为:在伺服泵、作动器上设置压力、压差、转速等传感器,由伺服控制器进行信息的采集处理和判断,然后控制电磁阀进行切换。The
如图5所示,将动力控制单元与液压作动器集成设计,动力控制单元安装在作动器一端的四周。As shown in Figure 5, the power control unit is integrated with the hydraulic actuator, and the power control unit is installed around one end of the actuator.
其中,本例给出的增压机构6和隔离阀14还可以采用其它的适用形式。Wherein, the
伺服控制器和电机驱动器视结构布局需要,可以安装在液压作动器上;也安装于箭上其它位置别处,与液压作动器间通过电缆连接。The servo controller and motor driver can be installed on the hydraulic actuator according to the structural layout requirements; they can also be installed on other positions on the arrow, and are connected to the hydraulic actuator through cables.
一般情况,一台四余度伺服控制器和一台电机驱动器可以同时控制一至四台本发明中的伺服机构。In general, one four-redundancy servo controller and one motor driver can simultaneously control one to four servo mechanisms of the present invention.
如果液氧煤油发动机推力矢量控制功率需要为30kW,则每个动力控制单元设计功率取15kW,即液动机和变量柱塞泵功率在15kW左右。正常工作时,四台动力控制单元同时工作,每台平均分摊7.5kW的功率。如果两台动力控制单元失效,剩余两台仍可以提供全额的控制功率需求。因此,本设计具备“能源和控制部件的两度故障容错能力”。并且,单个动力器件的功率水平与单通道设计相比下降了一半。If the thrust vector control power of the liquid oxygen kerosene engine needs to be 30kW, the design power of each power control unit is 15kW, that is, the power of the hydraulic motor and the variable plunger pump is about 15kW. During normal operation, four power control units work at the same time, each sharing an average power of 7.5kW. If two power control units fail, the remaining two can still provide full control power requirements. Therefore, this design has "two-degree fault tolerance of energy and control components". Also, the power level of a single power device is halved compared to a single-channel design.
同时,由于火箭推力矢量控制峰值功率总是瞬时的,经常性功率一般也只是最大功率的10%~30%。因此,即便只有一台动力单元工作,仍可满足推力矢量控制的最低需求,可以在最危险时刻维持火箭的姿态稳定。因此,本设计具备“能源和控制的三度故障工作”的高可靠工作能力,是现有产品没有的。At the same time, since the peak power of rocket thrust vector control is always instantaneous, the recurrent power is generally only 10% to 30% of the maximum power. Therefore, even if only one power unit is working, it can still meet the minimum requirements of thrust vector control, and can maintain the attitude stability of the rocket at the most dangerous moment. Therefore, this design has the high reliable working ability of "three-degree fault operation of energy and control", which is not available in existing products.
而用于地面测试的电机则可取6~10kW,电机可采用中频永磁同步电机的高比功率设计。The motor used for ground testing is preferably 6-10kW, and the motor can be designed with a high specific power of an intermediate frequency permanent magnet synchronous motor.
变量柱塞泵的功率取15kW,其变量斜盘的控制功率不超过1kW,现有的机电伺服控制完全可以胜任。也因此回避了传统电液伺服阀节流控制易受污染的难题以及单纯机电伺服机构中的大功率伺服电机控制难题。The power of the variable plunger pump is 15kW, and the control power of the variable swash plate does not exceed 1kW. The existing electromechanical servo control is fully capable. Therefore, it avoids the difficult problem of the throttling control of the traditional electro-hydraulic servo valve being easily polluted and the problem of controlling the high-power servo motor in the pure electromechanical servo mechanism.
视使用需要,伺服机构具体设计可以采用2至4余度设计。Depending on the needs of use, the specific design of the servo mechanism can be designed with 2 to 4 degrees of redundancy.
伺服泵、液动机、电机、减速器等部件以及伺服控制器、电机驱动器等产品,现有发明均有涉及或者有现成产品,可以作为本发明的部件或一部分。Servo pumps, hydraulic motors, motors, reducers and other components, as well as products such as servo controllers and motor drivers, are all related to existing inventions or have ready-made products, which can be used as components or a part of the present invention.
Claims (6)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201210329946.3A CN103670801A (en) | 2012-09-07 | 2012-09-07 | A Redundancy Pump Control Servo Mechanism for Thrust Vector Control of Liquid Oxygen Kerosene Engine |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201210329946.3A CN103670801A (en) | 2012-09-07 | 2012-09-07 | A Redundancy Pump Control Servo Mechanism for Thrust Vector Control of Liquid Oxygen Kerosene Engine |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN103670801A true CN103670801A (en) | 2014-03-26 |
Family
ID=50309387
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201210329946.3A Pending CN103670801A (en) | 2012-09-07 | 2012-09-07 | A Redundancy Pump Control Servo Mechanism for Thrust Vector Control of Liquid Oxygen Kerosene Engine |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN103670801A (en) |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104196784A (en) * | 2014-08-25 | 2014-12-10 | 湖北三江航天红峰控制有限公司 | Integrated electro-hydraulic servo mechanism for cabin |
| CN104698984A (en) * | 2015-02-17 | 2015-06-10 | 北京精密机电控制设备研究所 | Thrust vector controlled electromechanical servo system |
| CN105022861A (en) * | 2015-06-11 | 2015-11-04 | 北京精密机电控制设备研究所 | Method for determining oil storage quantity of extrusion type servo system for carrier rocket |
| CN105370441A (en) * | 2015-10-16 | 2016-03-02 | 北京精密机电控制设备研究所 | Multivariable redundancy numerical control servo system adopting multisource hydrogen energy |
| CN105443451A (en) * | 2015-12-07 | 2016-03-30 | 北京精密机电控制设备研究所 | Kilowatt-level rock output three-redundancy electro-hydraulic digital servo system |
| CN105523197A (en) * | 2014-10-27 | 2016-04-27 | 北京精密机电控制设备研究所 | Triple-redundancy digital servo system for quickly responding to 10kW-grade linear output |
| CN105604737A (en) * | 2016-01-18 | 2016-05-25 | 北京航天发射技术研究所 | Vacuumizing and spill metering system for kerosine rocket engine |
| CN106224329A (en) * | 2016-09-08 | 2016-12-14 | 北京精密机电控制设备研究所 | A kind of integrated electric Hydrauservo System |
| CN106500992A (en) * | 2016-09-21 | 2017-03-15 | 北京精密机电控制设备研究所 | A kind of drainage engine kerosene servo control mechanism ground experiment method |
| CN106894918A (en) * | 2017-03-13 | 2017-06-27 | 西北工业大学 | A kind of mode pre-cooling cycle system suitable for assembly power cycle engine |
| CN108536004A (en) * | 2018-03-29 | 2018-09-14 | 北京精密机电控制设备研究所 | A kind of dual redundant electromechanical coupling system remaining switching method |
| CN109681347A (en) * | 2018-12-13 | 2019-04-26 | 西安航天动力研究所 | A kind of liquid-propellant rocket engine thrust adjusting servo-system fault protecting method |
| CN114545772A (en) * | 2022-02-18 | 2022-05-27 | 北京航空航天大学 | Design method and system for intelligent controller of solid-liquid variable thrust engine |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1154325A (en) * | 1995-09-15 | 1997-07-16 | 国家航空工业公司 | Process and device for control of rudder of aircraft |
| US5778671A (en) * | 1996-09-13 | 1998-07-14 | Vickers, Inc. | Electrohydraulic system and apparatus with bidirectional electric-motor/hydraulic-pump unit |
| CN102588382A (en) * | 2012-03-19 | 2012-07-18 | 北京航空航天大学 | Direct-drive electro-hydraulic actuator |
-
2012
- 2012-09-07 CN CN201210329946.3A patent/CN103670801A/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1154325A (en) * | 1995-09-15 | 1997-07-16 | 国家航空工业公司 | Process and device for control of rudder of aircraft |
| US5778671A (en) * | 1996-09-13 | 1998-07-14 | Vickers, Inc. | Electrohydraulic system and apparatus with bidirectional electric-motor/hydraulic-pump unit |
| CN102588382A (en) * | 2012-03-19 | 2012-07-18 | 北京航空航天大学 | Direct-drive electro-hydraulic actuator |
Non-Patent Citations (1)
| Title |
|---|
| 马纪明等: "《一体化电动静液作动器(EHA)的设计与仿真分析》", 《航空学报》 * |
Cited By (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104196784A (en) * | 2014-08-25 | 2014-12-10 | 湖北三江航天红峰控制有限公司 | Integrated electro-hydraulic servo mechanism for cabin |
| CN105523197A (en) * | 2014-10-27 | 2016-04-27 | 北京精密机电控制设备研究所 | Triple-redundancy digital servo system for quickly responding to 10kW-grade linear output |
| CN104698984A (en) * | 2015-02-17 | 2015-06-10 | 北京精密机电控制设备研究所 | Thrust vector controlled electromechanical servo system |
| CN104698984B (en) * | 2015-02-17 | 2017-10-03 | 北京精密机电控制设备研究所 | The electromechanical servo system of thruster vector control |
| CN105022861A (en) * | 2015-06-11 | 2015-11-04 | 北京精密机电控制设备研究所 | Method for determining oil storage quantity of extrusion type servo system for carrier rocket |
| CN105022861B (en) * | 2015-06-11 | 2018-05-22 | 北京精密机电控制设备研究所 | A kind of carrier rocket definite method of squash type servo-drive system oil storage |
| CN105370441B (en) * | 2015-10-16 | 2017-03-22 | 北京精密机电控制设备研究所 | Multivariable redundancy numerical control servo system adopting multisource hydrogen energy |
| CN105370441A (en) * | 2015-10-16 | 2016-03-02 | 北京精密机电控制设备研究所 | Multivariable redundancy numerical control servo system adopting multisource hydrogen energy |
| CN105443451A (en) * | 2015-12-07 | 2016-03-30 | 北京精密机电控制设备研究所 | Kilowatt-level rock output three-redundancy electro-hydraulic digital servo system |
| CN105604737A (en) * | 2016-01-18 | 2016-05-25 | 北京航天发射技术研究所 | Vacuumizing and spill metering system for kerosine rocket engine |
| CN105604737B (en) * | 2016-01-18 | 2018-11-09 | 北京航天发射技术研究所 | Kerosene Rocket Engines, which vacuumize, releases metering system |
| CN106224329A (en) * | 2016-09-08 | 2016-12-14 | 北京精密机电控制设备研究所 | A kind of integrated electric Hydrauservo System |
| CN106224329B (en) * | 2016-09-08 | 2018-02-13 | 北京精密机电控制设备研究所 | A kind of integrated electric Hydrauservo System |
| CN106500992A (en) * | 2016-09-21 | 2017-03-15 | 北京精密机电控制设备研究所 | A kind of drainage engine kerosene servo control mechanism ground experiment method |
| CN106500992B (en) * | 2016-09-21 | 2018-10-09 | 北京精密机电控制设备研究所 | A kind of drainage engine kerosene servo mechanism ground experiment method |
| CN106894918A (en) * | 2017-03-13 | 2017-06-27 | 西北工业大学 | A kind of mode pre-cooling cycle system suitable for assembly power cycle engine |
| CN106894918B (en) * | 2017-03-13 | 2018-04-10 | 西北工业大学 | The mode pre-cooling cycle system and its working method of assembly power cycle engine |
| CN108536004A (en) * | 2018-03-29 | 2018-09-14 | 北京精密机电控制设备研究所 | A kind of dual redundant electromechanical coupling system remaining switching method |
| CN109681347A (en) * | 2018-12-13 | 2019-04-26 | 西安航天动力研究所 | A kind of liquid-propellant rocket engine thrust adjusting servo-system fault protecting method |
| CN114545772A (en) * | 2022-02-18 | 2022-05-27 | 北京航空航天大学 | Design method and system for intelligent controller of solid-liquid variable thrust engine |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103670801A (en) | A Redundancy Pump Control Servo Mechanism for Thrust Vector Control of Liquid Oxygen Kerosene Engine | |
| CN105570237B (en) | A dual redundant electromechanical static pressure servo mechanism | |
| CN108591193B (en) | Electric hydrostatic actuator system with energy recycling system | |
| CN103075393A (en) | Novel multi-redundancy electromechanical hydrostatic servo mechanism | |
| CN102418354A (en) | Drive system of hybrid hydraulic excavator based on pump/motor | |
| US20150041688A1 (en) | Electro-hydraulic system for driving large-scale rotary motion valve supplied by solar low-capacity power | |
| CN113790184A (en) | Hydraulic-electric coupling drive multi-actuator system and control method | |
| WO2016041230A1 (en) | Variable-speed volume-control direct-drive all-electric hydraulic excavator drive and energy recovery system | |
| CN105839689A (en) | Multi-energy multi-motor hydraulic excavator electro-hydraulic mixing driving system and control method | |
| CN205617466U (en) | Multipotency source many motors hydraulic shovel electricity liquid hybrid -driven system | |
| CN110435757B (en) | Electric control steering system of steering axle | |
| CN101737380B (en) | Electro-hydraulic load simulator with low-pressure oil pump | |
| CN107989858B (en) | The double actuator electrohydraulic servo system positions pressure bonding control methods of series connection | |
| CN104859424B (en) | Hydraulic auxiliary drive system by adopting wheel hub motors | |
| CN109185284B (en) | Electrostatic fluid actuator system control method with energy recovery system | |
| CN111536085B (en) | A hydraulic control system for a foot-type hydraulic robot with energy recovery | |
| CN111114758B (en) | Heterogeneous series dual-redundancy steering engine | |
| CN106402098A (en) | Electromechanical static pressure control system | |
| CN204942135U (en) | The control gear of excavator hydraulic system | |
| CN103075394B (en) | Four-redundancy valve-controlled electro-hydraulic servo system | |
| CN102384114A (en) | Engineering mechanical arm hydraulic position driving control system | |
| CN106257060B (en) | Non-similar redundancy electric steering device | |
| CN202381430U (en) | Load-sensitive hydraulic system and crane with same | |
| CN103397677A (en) | Hydraulic excavator movable arm loop based on hydraulic transformer and control method thereof | |
| CN111516858B (en) | Electric servo actuator |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| RJ01 | Rejection of invention patent application after publication |
Application publication date: 20140326 |
|
| RJ01 | Rejection of invention patent application after publication |