CN106980314B - 一种运动控制方法及电子设备 - Google Patents
一种运动控制方法及电子设备 Download PDFInfo
- Publication number
- CN106980314B CN106980314B CN201710151346.5A CN201710151346A CN106980314B CN 106980314 B CN106980314 B CN 106980314B CN 201710151346 A CN201710151346 A CN 201710151346A CN 106980314 B CN106980314 B CN 106980314B
- Authority
- CN
- China
- Prior art keywords
- wheel
- distance
- electronic device
- rotate
- controlling
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims abstract description 28
- 238000012544 monitoring process Methods 0.000 claims abstract description 23
- 238000010586 diagram Methods 0.000 description 8
- 230000001133 acceleration Effects 0.000 description 7
- 230000003044 adaptive effect Effects 0.000 description 6
- 230000004888 barrier function Effects 0.000 description 6
- 230000008878 coupling Effects 0.000 description 3
- 238000010168 coupling process Methods 0.000 description 3
- 238000005859 coupling reaction Methods 0.000 description 3
- 238000004891 communication Methods 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 238000006467 substitution reaction Methods 0.000 description 2
- 206010063385 Intellectualisation Diseases 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
Images







Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0088—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots characterized by the autonomous decision making process, e.g. artificial intelligence, predefined behaviours
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0055—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots with safety arrangements
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0214—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory in accordance with safety or protection criteria, e.g. avoiding hazardous areas
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0223—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory involving speed control of the vehicle
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0238—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using obstacle or wall sensors
- G05D1/024—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using obstacle or wall sensors in combination with a laser
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0255—Control of position or course in two dimensions specially adapted to land vehicles using acoustic signals, e.g. ultra-sonic singals
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Aviation & Aerospace Engineering (AREA)
- General Physics & Mathematics (AREA)
- Game Theory and Decision Science (AREA)
- Medical Informatics (AREA)
- Evolutionary Computation (AREA)
- Artificial Intelligence (AREA)
- Health & Medical Sciences (AREA)
- Business, Economics & Management (AREA)
- Optics & Photonics (AREA)
- Electromagnetism (AREA)
- Acoustics & Sound (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
本发明公开了一种运动控制方法及电子设备,所述方法包括:监测第一车轮沿第一方向距离障碍体的第一距离,以及监测第二车轮沿所述第一方向距离障碍体的第二距离,其中,所述第一车轮和所述第二车轮设置于电子设备的两侧;比较所述第一距离和所述第二距离的大小;如果所述第一距离大于所述第二距离,则控制所述第一车轮和/或所述第二车轮的转动参数,以使得所述电子设备向左转动;如果所述第一距离小于所述第二距离,则控制所述第一车轮和/或所述第二车轮的转动参数,以使得所述电子设备向右转动。
Description
技术领域
本发明涉及自动巡航技术,尤其涉及一种适用于自动巡航中的运动控制方法及电子设备。
背景技术
随着机器人智能化的发展,越来越多的机器人都具有自动巡航功能。自动巡航是指:按照预设策略规划巡航路径,然后,控制机器人按照规划的巡航路径进行移动。然而,这种巡航的前提是考虑到路径为空旷路径,并没有考虑到复杂的路况,例如某些复杂的角落或者某些地方具有障碍物等,机器人无法对障碍物进行躲避,这可能导致巡航失败甚至是损坏机器人。
发明内容
为解决上述技术问题,本发明实施例提供了一种运动控制方法及电子设备。
本发明实施例提供的运动控制方法,包括:
监测第一车轮沿第一方向距离障碍体的第一距离,以及监测第二车轮沿所述第一方向距离障碍体的第二距离,其中,所述第一车轮和所述第二车轮设置于电子设备的两侧;
比较所述第一距离和所述第二距离的大小;
如果所述第一距离大于所述第二距离,则控制所述第一车轮和/或所述第二车轮的转动参数,以使得所述电子设备向左转动;
如果所述第一距离小于所述第二距离,则控制所述第一车轮和/或所述第二车轮的转动参数,以使得所述电子设备向右转动。
本发明实施例中,所述比较所述第一距离和所述第二距离的大小之前,所述方法还包括:
获取所述第一距离和所述第二距离中的最小值,判断所述最小值是否大于等于预设长度;
如果所述最小值大于等于所述预设长度,则比较所述第一距离和所述第二距离的大小。
本发明实施例中,所述方法还包括:
如果所述最小值小于所述预设长度,则控制所述第一车轮和/或所述第二车轮沿第二方向转动,直至所述最小值大于等于所述预设长度停止转动。
本发明实施例中,所述控制所述第一车轮和/或所述第二车轮的转动参数,以使得所述电子设备向左转动,包括:
控制所述第一车轮停止转动,并控制所述第二车轮沿第三方向转动,以使得所述电子设备向左转动;或者,
控制所述第一车轮沿第二方向转动,并控制所述第二车轮沿第三方向转动,以使得所述电子设备向左转动。
本发明实施例中,所述控制所述第一车轮和/或所述第二车轮的转动参数,以使得所述电子设备向右转动,包括:
控制所述第二车轮停止转动,并控制所述第一车轮沿第三方向转动,以使得所述电子设备向右转动;或者,
控制所述第二车轮沿第二方向转动,并控制所述第一车轮沿第三方向转动,以使得所述电子设备向右转动。
本发明实施例提供的电子设备,包括:第一车轮、第二车轮,所述第一车轮和所述第二车轮设置于电子设备的两侧;
传感器,用于监测第一车轮沿第一方向距离障碍体的第一距离,以及监测第二车轮沿所述第一方向距离障碍体的第二距离;
处理器,用于比较所述第一距离和所述第二距离的大小;如果所述第一距离大于所述第二距离,则控制所述第一车轮和/或所述第二车轮的转动参数,以使得所述电子设备向左转动;如果所述第一距离小于所述第二距离,则控制所述第一车轮和/或所述第二车轮的转动参数,以使得所述电子设备向右转动。
本发明实施例中,所述处理器,还用于获取所述第一距离和所述第二距离中的最小值,判断所述最小值是否大于等于预设长度;如果所述最小值大于等于所述预设长度,则比较所述第一距离和所述第二距离的大小。
本发明实施例中,所述处理器,还用于如果所述最小值小于所述预设长度,则控制所述第一车轮和/或所述第二车轮沿第二方向转动,直至所述最小值大于等于所述预设长度停止转动。
本发明实施例中,所述处理器,还用于控制所述第一车轮停止转动,并控制所述第二车轮沿第三方向转动,以使得所述电子设备向左转动;或者,控制所述第一车轮沿第二方向转动,并控制所述第二车轮沿第三方向转动,以使得所述电子设备向左转动。
本发明实施例中,所述处理器,还用于控制所述第二车轮停止转动,并控制所述第一车轮沿第三方向转动,以使得所述电子设备向右转动;或者,控制所述第二车轮沿第二方向转动,并控制所述第一车轮沿第三方向转动,以使得所述电子设备向右转动。
本发明实施例的技术方案中,监测第一车轮沿第一方向距离障碍体的第一距离,以及监测第二车轮沿所述第一方向距离障碍体的第二距离,其中,所述第一车轮和所述第二车轮设置于电子设备的两侧;比较所述第一距离和所述第二距离的大小;如果所述第一距离大于所述第二距离,则控制所述第一车轮和/或所述第二车轮的转动参数,以使得所述电子设备向左转动;如果所述第一距离小于所述第二距离,则控制所述第一车轮和/或所述第二车轮的转动参数,以使得所述电子设备向右转动。采用本发明实施例的技术方案实现自动巡航时,可以有效避免电子设备碰撞障碍物的危险,增加了自动巡航的精准度。
附图说明
图1为本发明实施例的运动控制方法的流程示意图一;
图2为本发明实施例的运动控制方法的流程示意图二;
图3为本发明实施例的运动控制方法的流程示意图三;
图4为本发明实施例的路径示意图;
图5为本发明实施例的转动原理示意图一;
图6为本发明实施例的转动原理示意图二;
图7为本发明实施例的电子设备的结构组成示意图一;
图8为本发明实施例的电子设备的结构组成示意图二。
具体实施方式
为了能够更加详尽地了解本发明实施例的特点与技术内容,下面结合附图对本发明实施例的实现进行详细阐述,所附附图仅供参考说明之用,并非用来限定本发明实施例。
图1为本发明实施例的运动控制方法的流程示意图一,如图1所示,所述运动控制方法包括以下步骤:
步骤101:监测第一车轮沿第一方向距离障碍体的第一距离,以及监测第二车轮沿所述第一方向距离障碍体的第二距离,其中,所述第一车轮和所述第二车轮设置于电子设备的两侧。
本发明实施例中,电子设备可以是机器人、平衡车等移动设备。电子设备具有两个车轮,分别为第一车轮和第二车轮,其中,第一车轮为左车轮,第二车轮为右车轮,当然,电子设备还可以包括第三车轮,第三车轮为万向轮。
本发明实施例中,电子设备中的两个车轮上分别安装有超声波装置,通过超声波装置能够检测车轮距离前方障碍物的距离。
这里,第一车轮中的超声波装置的超声波频率和第二车轮中的超声波装置的超声波频率可以相同,也可以不同。
当然,检测距离的装置不局限于是超声波装置,还可以是激光雷达等装置。
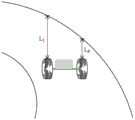
本发明实施例中,第一方向是指与两个车轮连线相垂直的方向。如图4所示,电子设备位于S形的路径中,在电子设备运动的过程中,有可能碰触到前方转弯处的路径边缘障碍物,因此,需要结合电子设备距离障碍物的距离进行适应性的转弯。具体地,如图5所示,监测第一车轮沿第一方向距离障碍体的第一距离(LL),以及监测第二车轮沿所述第一方向距离障碍体的第二距离(LR)。
步骤102:比较所述第一距离和所述第二距离的大小。
第一距离大于第二距离的情况如图5所示,即:LL>LR。第二距离大于第一距离的情况如图6所示,即:LR>LL。
步骤103:如果所述第一距离大于所述第二距离,则控制所述第一车轮和/或所述第二车轮的转动参数,以使得所述电子设备向左转动。
本发明实施例中,如图5所示,如果LL>LR,则表明需要控制电子设备整体向左转,以避免碰触障碍物。具体地,可以通过控制第一车轮不动,第二车轮前进(对应顺时针转动)来使得电子设备整体向左转。还可以通过控制第一车轮后退(对应逆时针转动)且第二车轮前进(对应顺时针转动)来使得电子设备整体向左转。
本发明实施例中,根据第一距离和第二距离来确定两个车轮各自的转动参数,其中,所述转动参数包括以下至少之一:转动速度、转动加速度。
步骤104:如果所述第一距离小于所述第二距离,则控制所述第一车轮和/或所述第二车轮的转动参数,以使得所述电子设备向右转动。
本发明实施例中,如图6所示,如果LR>LL,则表明需要控制电子设备整体向右转,以避免碰触障碍物。具体地,可以通过控制第二车轮不动,第一车轮前进(对应顺时针转动)来使得电子设备整体向右转。还可以通过控制第二车轮后退(对应逆时针转动)且第一车轮前进(对应顺时针转动)来使得电子设备整体向右转。
本发明实施例中,根据第一距离和第二距离来确定两个车轮各自的转动参数,其中,所述转动参数包括以下至少之一:转动速度、转动加速度。
本发明实施例中,在电子设备运动的过程中,实时监测第一距离和第二距离,并根据第一距离和第二距离及时调整电子设备中两个车轮的转动参数,做出适应性地转弯,以避免触碰障碍物。
图2为本发明实施例的运动控制方法的流程示意图二,如图2所示,所述运动控制方法包括以下步骤:
步骤201:监测第一车轮沿第一方向距离障碍体的第一距离,以及监测第二车轮沿所述第一方向距离障碍体的第二距离,其中,所述第一车轮和所述第二车轮设置于电子设备的两侧。
本发明实施例中,电子设备可以是机器人、平衡车等移动设备。电子设备具有两个车轮,分别为第一车轮和第二车轮,其中,第一车轮为左车轮,第二车轮为右车轮,当然,电子设备还可以包括第三车轮,第三车轮为万向轮。
本发明实施例中,电子设备中的两个车轮上分别安装有超声波装置,通过超声波装置能够检测车轮距离前方障碍物的距离。
这里,第一车轮中的超声波装置的超声波频率和第二车轮中的超声波装置的超声波频率可以相同,也可以不同。
当然,检测距离的装置不局限于是超声波装置,还可以是激光雷达等装置。
本发明实施例中,第一方向是指与两个车轮连线相垂直的方向。如图4所示,电子设备位于S形的路径中,在电子设备运动的过程中,有可能碰触到前方转弯处的路径边缘障碍物,因此,需要结合电子设备距离障碍物的距离进行适应性的转弯。具体地,如图5所示,监测第一车轮沿第一方向距离障碍体的第一距离(LL),以及监测第二车轮沿所述第一方向距离障碍体的第二距离(LR)。
步骤202:获取所述第一距离和所述第二距离中的最小值,判断所述最小值是否大于等于预设长度,是时,执行步骤203;否时,执行步骤204。
具体地,获取所述第一距离和所述第二距离中的最小值可以通过以下公式:min(LL,LR)得到,其中,min表示取最小值运算。
本发明实施例中,预设长度基于所述第一车轮和/或所述第二车轮的半径确定。在一实施方式中,第一车轮和第二车轮的半径相同,均为R。预设长度可以设置为5倍的R,即5R。这样,需要判断min(LL,LR)是否大于等于5R。如果min(LL,LR)≥5R,则表明电子设备距离障碍物不是特别近,可以执行转弯,如果min(LL,LR)<5R,则表明电子设备距离障碍物非常近,不能执行转弯(有触碰的危险)。
步骤203:比较所述第一距离和所述第二距离的大小,如果所述第一距离大于所述第二距离,执行步骤205;如果所述第一距离小于所述第二距离,执行步骤206。
第一距离大于第二距离的情况如图5所示,即:LL>LR。第二距离大于第一距离的情况如图6所示,即:LR>LL。
本发明实施例中,如果LL=LR,则不需要执行转弯,而是执行前进。
步骤204:控制所述第一车轮和/或所述第二车轮沿第二方向转动,直至所述最小值大于等于所述预设长度停止转动,执行步骤203。
这里,第二方向为车轮后退方向(对应逆时针转动)。如果min(LL,LR)<5R,则需要控制LL增大和/或LR增大,即:第一车轮后退或者第二车轮后退或者两个车轮同时后退,直到min(LL,LR)≥5R为止,继续执行步骤203,比较所述第一距离和所述第二距离的大小。
步骤205:控制所述第一车轮和/或所述第二车轮的转动参数,以使得所述电子设备向左转动。
本发明实施例中,如图5所示,如果LL>LR,则表明需要控制电子设备整体向左转,以避免碰触障碍物。具体地,可以通过控制第一车轮不动,第二车轮前进(对应顺时针转动)来使得电子设备整体向左转。还可以通过控制第一车轮后退(对应逆时针转动)且第二车轮前进(对应顺时针转动)来使得电子设备整体向左转。
本发明实施例中,根据第一距离和第二距离来确定两个车轮各自的转动参数,其中,所述转动参数包括以下至少之一:转动速度、转动加速度。
步骤206:控制所述第一车轮和/或所述第二车轮的转动参数,以使得所述电子设备向右转动。
本发明实施例中,如图6所示,如果LR>LL,则表明需要控制电子设备整体向右转,以避免碰触障碍物。具体地,可以通过控制第二车轮不动,第一车轮前进(对应顺时针转动)来使得电子设备整体向右转。还可以通过控制第二车轮后退(对应逆时针转动)且第一车轮前进(对应顺时针转动)来使得电子设备整体向右转。
本发明实施例中,根据第一距离和第二距离来确定两个车轮各自的转动参数,其中,所述转动参数包括以下至少之一:转动速度、转动加速度。
本发明实施例中,在电子设备运动的过程中,实时监测第一距离和第二距离,并根据第一距离和第二距离及时调整电子设备中两个车轮的转动参数,做出适应性地转弯,以避免触碰障碍物。
图3为本发明实施例的运动控制方法的流程示意图三,如图3所示,所述运动控制方法包括以下步骤:
步骤301:监测第一车轮沿第一方向距离障碍体的第一距离,以及监测第二车轮沿所述第一方向距离障碍体的第二距离,其中,所述第一车轮和所述第二车轮设置于电子设备的两侧。
本发明实施例中,电子设备可以是机器人、平衡车等移动设备。电子设备具有两个车轮,分别为第一车轮和第二车轮,其中,第一车轮为左车轮,第二车轮为右车轮,当然,电子设备还可以包括第三车轮,第三车轮为万向轮。
本发明实施例中,电子设备中的两个车轮上分别安装有超声波装置,通过超声波装置能够检测车轮距离前方障碍物的距离。
这里,第一车轮中的超声波装置的超声波频率和第二车轮中的超声波装置的超声波频率可以相同,也可以不同。
当然,检测距离的装置不局限于是超声波装置,还可以是激光雷达等装置。
本发明实施例中,第一方向是指与两个车轮连线相垂直的方向。如图4所示,电子设备位于S形的路径中,在电子设备运动的过程中,有可能碰触到前方转弯处的路径边缘障碍物,因此,需要结合电子设备距离障碍物的距离进行适应性的转弯。具体地,如图5所示,监测第一车轮沿第一方向距离障碍体的第一距离(LL),以及监测第二车轮沿所述第一方向距离障碍体的第二距离(LR)。
步骤302:比较所述第一距离和所述第二距离的大小。
第一距离大于第二距离的情况如图5所示,即:LL>LR。第二距离大于第一距离的情况如图6所示,即:LR>LL。
步骤303:如果所述第一距离大于所述第二距离,则控制所述第一车轮停止转动,并控制所述第二车轮沿第三方向转动,以使得所述电子设备向左转动。
这里,第三方向为车轮前进方向(对应顺时针转动)。
本发明实施例中,如图5所示,如果LL>LR,则表明需要控制电子设备整体向左转,以避免碰触障碍物。具体地,可以通过控制第一车轮不动,第二车轮前进(对应顺时针转动)来使得电子设备整体向左转。
本发明实施例中,根据第一距离和第二距离来确定两个车轮各自的转动参数,其中,所述转动参数包括以下至少之一:转动速度、转动加速度。
例如:第一距离为30R,第二距离为10R,此时,min(30R,10R)=10R>5R,其中,5R为预设长度,代表需要进行转弯,由于30R大于10R,因此,需要向左转弯,控制左车轮不动,右车轮向前转动(对应顺时针转动)来使得电子设备整体向左转。转动的具体参数可以根据30R和10R来确定,一般,第一距离和第二距离差值越大,则转动的角度越大。
当然,也可以控制第一车轮沿第二方向转动,并控制所述第二车轮沿第三方向转动,以使得所述电子设备向左转动。也即:左车轮后退,右车轮前进,实现向左转动。
步骤304:如果所述第一距离小于所述第二距离,则控制所述第二车轮停止转动,并控制所述第一车轮沿第三方向转动,以使得所述电子设备向右转动。
本发明实施例中,如图6所示,如果LR>LL,则表明需要控制电子设备整体向右转,以避免碰触障碍物。具体地,可以通过控制第二车轮不动,第一车轮前进(对应顺时针转动)来使得电子设备整体向右转。
本发明实施例中,根据第一距离和第二距离来确定两个车轮各自的转动参数,其中,所述转动参数包括以下至少之一:转动速度、转动加速度。
例如:第二距离为30R,第一距离为10R,此时,min(30R,10R)=10R>5R,其中,5R为预设长度,代表需要进行转弯,由于30R大于10R,因此,需要向右转弯,控制右车轮不动,左车轮向前转动(对应顺时针转动)来使得电子设备整体向右转。转动的具体参数可以根据30R和10R来确定,一般,第一距离和第二距离差值越大,则转动的角度越大。
当然,也可以控制所述第二车轮沿第二方向转动,并控制所述第一车轮沿第三方向转动,以使得所述电子设备向右转动。也即:左车轮前进,右车轮后退,实现向右转动。
本发明实施例中,在电子设备运动的过程中,实时监测第一距离和第二距离,并根据第一距离和第二距离及时调整电子设备中两个车轮的转动参数,做出适应性地转弯,以避免触碰障碍物。
图7为本发明实施例的电子设备的结构组成示意图一,如图7所示,所述电子设备包括:第一车轮71、第二车轮72,所述第一车轮71和所述第二车轮72设置于电子设备的两侧;
传感器73,用于监测第一车轮71沿第一方向距离障碍体的第一距离,以及监测第二车轮72沿所述第一方向距离障碍体的第二距离;
处理器74,用于比较所述第一距离和所述第二距离的大小;如果所述第一距离大于所述第二距离,则控制所述第一车轮71和/或所述第二车轮72的转动参数,以使得所述电子设备向左转动;如果所述第一距离小于所述第二距离,则控制所述第一车轮71和/或所述第二车轮72的转动参数,以使得所述电子设备向右转动。
在一实施方式中,所述处理器74,还用于获取所述第一距离和所述第二距离中的最小值,判断所述最小值是否大于等于预设长度;如果所述最小值大于等于所述预设长度,则比较所述第一距离和所述第二距离的大小。
在一实施方式中,所述处理器74,还用于如果所述最小值小于所述预设长度,则控制所述第一车轮71和/或所述第二车轮72沿第二方向转动,直至所述最小值大于等于所述预设长度停止转动。
在一实施方式中,所述处理器74,还用于控制所述第一车轮71停止转动,并控制所述第二车轮72沿第三方向转动,以使得所述电子设备向左转动;或者,控制所述第一车轮71沿第二方向转动,并控制所述第二车轮72沿第三方向转动,以使得所述电子设备向左转动。
在一实施方式中,所述处理器74,还用于控制所述第二车轮72停止转动,并控制所述第一车轮71沿第三方向转动,以使得所述电子设备向右转动;或者,控制所述第二车轮72沿第二方向转动,并控制所述第一车轮71沿第三方向转动,以使得所述电子设备向右转动。
本领域技术人员应当理解,图7所示的电子设备中的各单元的实现功能可参照前述运动控制方法的相关描述而理解。
图8为本发明实施例的电子设备的结构组成示意图二,如图8所示,所述电子设备包括:第一车轮81、第二车轮82,所述第一车轮81和所述第二车轮82设置于电子设备的两侧;
传感器83,用于监测第一车轮81沿第一方向距离障碍体的第一距离,以及监测第二车轮82沿所述第一方向距离障碍体的第二距离;
处理器84,用于比较所述第一距离和所述第二距离的大小;如果所述第一距离大于所述第二距离,则控制所述第一车轮81和/或所述第二车轮82的转动参数,以使得所述电子设备向左转动;如果所述第一距离小于所述第二距离,则控制所述第一车轮81和/或所述第二车轮82的转动参数,以使得所述电子设备向右转动。
在一实施方式中,所述处理器84,还用于获取所述第一距离和所述第二距离中的最小值,判断所述最小值是否大于等于预设长度;如果所述最小值大于等于所述预设长度,则比较所述第一距离和所述第二距离的大小。
在一实施方式中,所述处理器84,还用于如果所述最小值小于所述预设长度,则控制所述第一车轮81和/或所述第二车轮82沿第二方向转动,直至所述最小值大于等于所述预设长度停止转动。
在一实施方式中,所述处理器84,还用于控制所述第一车轮81停止转动,并控制所述第二车轮82沿第三方向转动,以使得所述电子设备向左转动;或者,控制所述第一车轮81沿第二方向转动,并控制所述第二车轮82沿第三方向转动,以使得所述电子设备向左转动。
在一实施方式中,所述处理器84,还用于控制所述第二车轮82停止转动,并控制所述第一车轮81沿第三方向转动,以使得所述电子设备向右转动;或者,控制所述第二车轮82沿第二方向转动,并控制所述第一车轮81沿第三方向转动,以使得所述电子设备向右转动。
在一实施方式中,所述电子设备还包括:存储器85,用于存储第一车轮以及第二车轮的历史转动记录,这样,电子设备可以根据历史转动记录进行逆向运动,方便电子设备撤回原地。
这里,历史转动记录的内容可以包括:各个时刻对应的转动速度和加速度。
本发明实施例所记载的技术方案之间,在不冲突的情况下,可以任意组合。
在本发明所提供的几个实施例中,应该理解到,所揭露的方法和智能设备,可以通过其它的方式实现。以上所描述的设备实施例仅仅是示意性的,例如,所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,如:多个单元或组件可以结合,或可以集成到另一个系统,或一些特征可以忽略,或不执行。另外,所显示或讨论的各组成部分相互之间的耦合、或直接耦合、或通信连接可以是通过一些接口,设备或单元的间接耦合或通信连接,可以是电性的、机械的或其它形式的。
上述作为分离部件说明的单元可以是、或也可以不是物理上分开的,作为单元显示的部件可以是、或也可以不是物理单元,即可以位于一个地方,也可以分布到多个网络单元上;可以根据实际的需要选择其中的部分或全部单元来实现本实施例方案的目的。
另外,在本发明各实施例中的各功能单元可以全部集成在一个第二处理单元中,也可以是各单元分别单独作为一个单元,也可以两个或两个以上单元集成在一个单元中;上述集成的单元既可以采用硬件的形式实现,也可以采用硬件加软件功能单元的形式实现。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。
Claims (8)
1.一种运动控制方法,其特征在于,所述方法包括:
监测第一车轮沿第一方向距离障碍体的第一距离,以及监测第二车轮沿所述第一方向距离障碍体的第二距离,其中,所述第一车轮和所述第二车轮设置于电子设备的两侧;所述第一方向为与所述第一车轮与所述第二车轮的连线相垂直的方向;
获取所述第一距离和所述第二距离中的最小值,判断所述最小值是否大于等于预设长度;
如果所述最小值小于预设长度,则控制所述第一车轮和/或所述第二车轮沿第二方向转动,直至所述最小值大于等于所述预设长度停止转动;其中,所述第二方向至少包括车轮后退方向;
比较所述第一距离和所述第二距离的大小;
如果所述第一距离大于所述第二距离,则控制所述第一车轮和/或所述第二车轮的转动参数,以使得所述电子设备向左转动;
如果所述第一距离小于所述第二距离,则控制所述第一车轮和/或所述第二车轮的转动参数,以使得所述电子设备向右转动。
2.根据权利要求1所述的运动控制方法,其特征在于,所述方法还包括:
如果所述最小值大于等于所述预设长度,则比较所述第一距离和所述第二距离的大小。
3.根据权利要求1所述的运动控制方法,其特征在于,所述控制所述第一车轮和/或所述第二车轮的转动参数,以使得所述电子设备向左转动,包括:
控制所述第一车轮停止转动,并控制所述第二车轮沿第三方向转动,以使得所述电子设备向左转动;或者,
控制所述第一车轮沿第二方向转动,并控制所述第二车轮沿第三方向转动,以使得所述电子设备向左转动。
4.根据权利要求1所述的运动控制方法,其特征在于,所述控制所述第一车轮和/或所述第二车轮的转动参数,以使得所述电子设备向右转动,包括:
控制所述第二车轮停止转动,并控制所述第一车轮沿第三方向转动,以使得所述电子设备向右转动;或者,
控制所述第二车轮沿第二方向转动,并控制所述第一车轮沿第三方向转动,以使得所述电子设备向右转动。
5.一种电子设备,其特征在于,所述电子设备包括:第一车轮、第二车轮,所述第一车轮和所述第二车轮设置于电子设备的两侧;
传感器,用于监测第一车轮沿第一方向距离障碍体的第一距离,以及监测第二车轮沿所述第一方向距离障碍体的第二距离;所述第一方向为与所述第一车轮与所述第二车轮的连线相垂直的方向;
处理器,用于获取所述第一距离和所述第二距离中的最小值,判断所述最小值是否大于等于预设长度;如果所述最小值小于预设长度,则控制所述第一车轮和/或所述第二车轮沿第二方向转动,直至所述最小值大于等于所述预设长度停止转动;其中,所述第二方向至少包括车轮后退方向;比较所述第一距离和所述第二距离的大小;如果所述第一距离大于所述第二距离,则控制所述第一车轮和/或所述第二车轮的转动参数,以使得所述电子设备向左转动;如果所述第一距离小于所述第二距离,则控制所述第一车轮和/或所述第二车轮的转动参数,以使得所述电子设备向右转动。
6.根据权利要求5所述的电子设备,其特征在于,所述处理器,还用于如果所述最小值大于等于所述预设长度,则比较所述第一距离和所述第二距离的大小。
7.根据权利要求5所述的电子设备,其特征在于,所述处理器,还用于控制所述第一车轮停止转动,并控制所述第二车轮沿第三方向转动,以使得所述电子设备向左转动;或者,控制所述第一车轮沿第二方向转动,并控制所述第二车轮沿第三方向转动,以使得所述电子设备向左转动。
8.根据权利要求5所述的电子设备,其特征在于,所述处理器,还用于控制所述第二车轮停止转动,并控制所述第一车轮沿第三方向转动,以使得所述电子设备向右转动;或者,控制所述第二车轮沿第二方向转动,并控制所述第一车轮沿第三方向转动,以使得所述电子设备向右转动。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201710151346.5A CN106980314B (zh) | 2017-03-14 | 2017-03-14 | 一种运动控制方法及电子设备 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201710151346.5A CN106980314B (zh) | 2017-03-14 | 2017-03-14 | 一种运动控制方法及电子设备 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN106980314A CN106980314A (zh) | 2017-07-25 |
| CN106980314B true CN106980314B (zh) | 2020-11-20 |
Family
ID=59338935
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201710151346.5A Active CN106980314B (zh) | 2017-03-14 | 2017-03-14 | 一种运动控制方法及电子设备 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN106980314B (zh) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015166705A1 (ja) * | 2014-04-28 | 2015-11-05 | 日立建機株式会社 | 路肩検出システムおよび鉱山用運搬車両 |
| KR20160070467A (ko) * | 2014-12-10 | 2016-06-20 | 재단법인대구경북과학기술원 | 장애물 회피를 위한 멀티로봇 시스템 및 장애물 회피를 위한 스위칭 대형 전략을 이용하는 방법 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN204169779U (zh) * | 2014-11-07 | 2015-02-25 | 王宁静 | 清洁机器人 |
| KR101712399B1 (ko) * | 2014-11-25 | 2017-03-06 | 현대모비스 주식회사 | 차량의 후방 장애물 표시 방법 |
| JP6553350B2 (ja) * | 2014-11-26 | 2019-07-31 | アイシン精機株式会社 | 移動体 |
| CN205530058U (zh) * | 2016-01-25 | 2016-08-31 | 河南隆源电动车有限公司 | 垃圾清扫车 |
| CN105620474B (zh) * | 2016-01-26 | 2019-02-19 | 吉林大学 | 一种具有多模式的四轮轮毂驱动电动汽车主动避障方法 |
| CN106272425B (zh) * | 2016-09-07 | 2018-12-18 | 上海木木机器人技术有限公司 | 避障方法及机器人 |
-
2017
- 2017-03-14 CN CN201710151346.5A patent/CN106980314B/zh active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015166705A1 (ja) * | 2014-04-28 | 2015-11-05 | 日立建機株式会社 | 路肩検出システムおよび鉱山用運搬車両 |
| KR20160070467A (ko) * | 2014-12-10 | 2016-06-20 | 재단법인대구경북과학기술원 | 장애물 회피를 위한 멀티로봇 시스템 및 장애물 회피를 위한 스위칭 대형 전략을 이용하는 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN106980314A (zh) | 2017-07-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107792079B (zh) | 利用路径预测的自主车辆 | |
| EP3363698B1 (en) | Safety stoppage device and autonomous road vehicle equipped therewith | |
| JP7230777B2 (ja) | 車両制御システム | |
| KR101503418B1 (ko) | 반자동 주차 기계 | |
| JP6463571B1 (ja) | 車両制御装置 | |
| US20190299978A1 (en) | Automatic Navigation Using Deep Reinforcement Learning | |
| JP6997293B2 (ja) | 自律走行作業機、及び制御システム | |
| CN113287991B (zh) | 清洁机器人的控制方法和控制装置 | |
| US11040449B2 (en) | Robot control system and method of controlling a robot | |
| US20190315358A1 (en) | Apparatus and method for controlling drive of vehicle | |
| CN110015339A (zh) | 线控转向系统的齿条限制状况检测和相应方向盘转矩反馈 | |
| JP2016224038A5 (zh) | ||
| US20220001857A1 (en) | Parking assistance device, vehicle, parking assistance method, and non-transitory computer-readable medium | |
| JP7243095B2 (ja) | 車両制御装置 | |
| CN114489076A (zh) | 矩形扫地机器人控制方法、装置和矩形扫地机器人 | |
| JPWO2016006013A1 (ja) | 操舵制御装置、操舵制御システム、操舵制御方法、及び操舵制御プログラム | |
| CN109204315A (zh) | 变换车道的方法、装置、存储介质和电子设备 | |
| JP2018184139A (ja) | 駐車支援装置 | |
| CN114721384B (zh) | 一种车道保持的轨迹规划方法 | |
| CN111923998B (zh) | 一种方向盘角度控制方法、装置、设备及存储介质 | |
| CN106980314B (zh) | 一种运动控制方法及电子设备 | |
| CN116022147A (zh) | 车辆倒车行驶的控制方法及装置、车辆、存储介质、终端 | |
| CN113325415B (zh) | 车辆雷达数据和相机数据的融合方法及系统 | |
| JP5439552B2 (ja) | ロボットシステム | |
| JP2021508245A (ja) | ハッチ検出方法、システム、移動プラットフォーム及び植物保護無人機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |