CN110772427A - 一种具有自动分药功能的自动分药箱 - Google Patents
一种具有自动分药功能的自动分药箱 Download PDFInfo
- Publication number
- CN110772427A CN110772427A CN201910660115.6A CN201910660115A CN110772427A CN 110772427 A CN110772427 A CN 110772427A CN 201910660115 A CN201910660115 A CN 201910660115A CN 110772427 A CN110772427 A CN 110772427A
- Authority
- CN
- China
- Prior art keywords
- vacuum
- medication
- probe
- dose
- cup
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 239000003814 drug Substances 0.000 title claims abstract description 196
- 229940079593 drug Drugs 0.000 claims abstract description 118
- 239000000523 sample Substances 0.000 claims abstract description 78
- 238000002483 medication Methods 0.000 claims abstract description 11
- 238000004891 communication Methods 0.000 claims description 13
- 230000008859 change Effects 0.000 claims description 10
- 230000006698 induction Effects 0.000 claims description 9
- 239000006187 pill Substances 0.000 claims description 9
- 239000012530 fluid Substances 0.000 claims description 6
- 238000000034 method Methods 0.000 claims description 6
- 230000006870 function Effects 0.000 claims description 4
- 239000000411 inducer Substances 0.000 claims description 4
- 239000007787 solid Substances 0.000 claims description 4
- 239000013618 particulate matter Substances 0.000 claims description 3
- 230000009471 action Effects 0.000 claims description 2
- 238000004590 computer program Methods 0.000 claims description 2
- 239000000463 material Substances 0.000 claims description 2
- 230000000474 nursing effect Effects 0.000 claims description 2
- 239000002674 ointment Substances 0.000 claims description 2
- ZXQYGBMAQZUVMI-GCMPRSNUSA-N gamma-cyhalothrin Chemical compound CC1(C)[C@@H](\C=C(/Cl)C(F)(F)F)[C@H]1C(=O)O[C@H](C#N)C1=CC=CC(OC=2C=CC=CC=2)=C1 ZXQYGBMAQZUVMI-GCMPRSNUSA-N 0.000 claims 3
- 230000001939 inductive effect Effects 0.000 claims 2
- 238000004140 cleaning Methods 0.000 claims 1
- 230000000977 initiatory effect Effects 0.000 claims 1
- 230000003287 optical effect Effects 0.000 claims 1
- 238000010926 purge Methods 0.000 claims 1
- 238000010586 diagram Methods 0.000 description 8
- 230000007246 mechanism Effects 0.000 description 3
- 239000010813 municipal solid waste Substances 0.000 description 3
- 238000012937 correction Methods 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 238000012015 optical character recognition Methods 0.000 description 2
- 239000008188 pellet Substances 0.000 description 2
- 238000012552 review Methods 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 230000032683 aging Effects 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 210000000078 claw Anatomy 0.000 description 1
- 230000003930 cognitive ability Effects 0.000 description 1
- 230000001149 cognitive effect Effects 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 230000006735 deficit Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000004064 recycling Methods 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
- 238000003756 stirring Methods 0.000 description 1
Images























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61J—CONTAINERS SPECIALLY ADAPTED FOR MEDICAL OR PHARMACEUTICAL PURPOSES; DEVICES OR METHODS SPECIALLY ADAPTED FOR BRINGING PHARMACEUTICAL PRODUCTS INTO PARTICULAR PHYSICAL OR ADMINISTERING FORMS; DEVICES FOR ADMINISTERING FOOD OR MEDICINES ORALLY; BABY COMFORTERS; DEVICES FOR RECEIVING SPITTLE
- A61J7/00—Devices for administering medicines orally, e.g. spoons; Pill counting devices; Arrangements for time indication or reminder for taking medicine
- A61J7/04—Arrangements for time indication or reminder for taking medicine, e.g. programmed dispensers
- A61J7/0409—Arrangements for time indication or reminder for taking medicine, e.g. programmed dispensers with timers
- A61J7/0454—Arrangements for time indication or reminder for taking medicine, e.g. programmed dispensers with timers for dispensing of multiple drugs
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61J—CONTAINERS SPECIALLY ADAPTED FOR MEDICAL OR PHARMACEUTICAL PURPOSES; DEVICES OR METHODS SPECIALLY ADAPTED FOR BRINGING PHARMACEUTICAL PRODUCTS INTO PARTICULAR PHYSICAL OR ADMINISTERING FORMS; DEVICES FOR ADMINISTERING FOOD OR MEDICINES ORALLY; BABY COMFORTERS; DEVICES FOR RECEIVING SPITTLE
- A61J7/00—Devices for administering medicines orally, e.g. spoons; Pill counting devices; Arrangements for time indication or reminder for taking medicine
- A61J7/04—Arrangements for time indication or reminder for taking medicine, e.g. programmed dispensers
- A61J7/0409—Arrangements for time indication or reminder for taking medicine, e.g. programmed dispensers with timers
- A61J7/0427—Arrangements for time indication or reminder for taking medicine, e.g. programmed dispensers with timers with direct interaction with a dispensing or delivery system
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Pharmacology & Pharmacy (AREA)
- Medical Preparation Storing Or Oral Administration Devices (AREA)
Abstract
本发明公开了一种具有自动分药功能的自动分药箱,包括一个带存储箱的传送带和外围的一个投递箱。真空系统和带有真空杯的真空探头探头的末端,用于通过感应真空抓住和握住位于贮存箱中的药物剂量,并将其移动到配药箱或投递箱。该系统包括一个可编程计算机来控制系统和顺序的正确分配在预先指定的时间服药。本发明以真空为基础的探头,可以拾起并牢牢抓住和携带各种各样的药物,使它更容易加载药物直接进入系统,用户将不再需要担心记住什么时候服用他或她的药物,以及他或她是否服用了药物。
Description
技术领域
本发明涉及医药设备技术领域,尤其涉及一种具有自动分药功能的自动分药箱。
背景技术
通常情况下,患者每天服用大量药物数次。在每天多次服用多种药物的患者中,老年患者占很大比例。这些老年患者的病情往往有限
认知能力和身体缺陷,因此确保他们在正确的时间和剂量服用药物是一个重要的问题。最近的研究文章发表在《药物与衰老》(DrugsandAging)杂志上的一篇文章指出,四分之一的疗养院入院是因为在管理家庭药物方面存在问题。自动配药系统一直是解决这一问题的尝试之一分发多种药物的问题。
目前美国专利描述了一种这样的尝试,它使用带有探针的真空系统从储存室中取出药丸把药片放在传送带上,然后把药片放在储藏柜旁边的小槽里,每个小槽旁边都有一个小槽。对滑道的需求增加了不合理的结构和费用。此外,该专利还拥有一个专门设计的真空探头事实上,它似乎在效用和抓地力上受到限制,抓地力足够长时间,因此需要紧挨着储物室的滑道下降把药片移到配药点。
发明内容
1.要解决的技术问题
本发明的目的是为了解决现有技术中老年患者的病情往往有限认知能力和身体缺陷,因此如何确保他们在正确的时间和剂量服用药物的问题,而提出的一种具有自动分药功能的自动分药箱。
2.技术方案
为了实现上述目的,本发明采用了如下技术方案:
一种具有自动分药功能的自动分药箱,包括:
a.外围有多个药箱的传送带,其中所述的药箱之一为配药箱,所述的剩余药箱为特定药物的贮存箱;
b..一种机器手臂,能够定位提取的剂量,从所述储物箱中取出药物,并将提取的药物存放于所述配药箱中;
c.所述机械臂有一个真空探针与远端连接到一个真空诱导系统和近端说年底真空探头连接到一个真空的杯子铰接体封闭室内室和一个孔在中心的真空保温杯表示,年底通向内腔,其中所述内腔处于流体通信中,通过具有所述真空诱导系统的所述探头的内部通道;
d.所述真空杯的真空端由所述真空杯定位探针接触表面的一种药物剂量,在开始说真空诱导系统,所述真空杯的真空端牢牢握住所述药物的剂量,所述机械手将其移动到所述配药箱;
e.一种计算机控制器系统,其中注册了存储在特定标识的存储箱内的特定药物,并且在所述控制器中系统控制所述机械臂的操作,从而指导所述机械臂从指定的存储箱中提取药物剂量,并在预定的时间将药物剂量存入所述分配箱中。
优选地,其中所述存储箱的形状是向所述机械臂(如所述探头上的真空杯) 提供所述药物剂量连接到所述机械臂上的所述机械臂可以在所述机械臂上的预定位置接合所述机械臂上的所述机械臂,其中所述存储箱的形状使其具有较大的上部存储区域和较低的漏斗形区域,所述较低的漏斗形区域将范围缩小到一个终止点,当所述药箱中的其他药量被移除时,存储在药箱中的药物剂量将被吸引到该终止点。
优选地,其中所述铰接体包括一个内腔,其至少有一个波纹管部分与所述真空端相邻,所述真空端是围绕所述孔的宽柔性表面,其中所述真空杯的所述孔小于所述真空端尺寸的四分之一,其中所述孔的直径为0.25英寸,所述真空端部的直径为1.25英寸。
优选地,包括用于覆盖和包含用于编组和分发多种药物的所述装置的壳体,所述壳体的外围至少有一个用于存储非所述药物的隔间以固体药物剂量的形式分发的,其中所述隔间可容纳从一组药物中选择的容器中分发的药物;吸入器、药膏管和注射器,其中具有铰接体的真空杯包括至少两个波纹管部分,其中所述计算机确定所述真空杯是否已使用药物剂量,并在接收到an的信号后紧紧握住从一组事件中选择的事件,包括:气压变化、气流变化、力的变化和重量的变化。
优选地,包括扫描打印的声明的装置,一种药物的处方信息被存储在一个特定的存储箱内所述计算机控制器系统,以及包括光学字符识别软件在内的软件,在所述计算机控制器系统中,将所述处方信息转换为所述计算机控制器系统可使用的形式确定何时分发处方信息中确定的药物,所述打印报表的设备是从一组中选择的,该组包括:处方容器上的标签和包含处方信息的表格,其中所述真空系统诱导系统能够逆转气流,从而从所述真空杯所持药物的剂量中清除引入所述真空诱导系统的微粒物质。
优选地,包括通信装置,该通信装置使所述计算机能够将具有预定信息的信号发送到电子设备通信设备,选择所述电子通信装置的索赔装置从选定的一组手机、平板电脑、电脑或普通手机组成。
一种以固体剂量的形式向个人分发多种药物的系统,包括:
a.用于控制所述系统操作的可编程计算机;
b.旋转木马围绕其中心点旋转,外围有多个储物箱,外围至少有一个投递箱;
c.带有真空探头的机械臂,其中所述机械臂配置为可在所述箱体中移动并将所述真空探头插入所述任何一个箱体中根据所述计算机的指示,设置多个存储箱和至少一个投递箱;
d.与所述探头的第一端连接的真空发生装置;
e.一种真空杯,其具有环绕内部空间的铰接体,附着于所述探头的第二端,所述真空发生装置与所述真空杯的内部空间通过流体通信所述探头具有中空内部,在其之间形成流体连接;
f.所述真空杯,其具有宽而柔软的药丸接触面,所述药丸接触面围绕着通向所述杯的所述内部空间的孔;和
g.其中所述探针的第二端插入所述多个存储箱中的任何一个,所述真空杯的药丸接触面与所述药物剂量接触并产生真空,所述真空杯装置正在工作,它能牢牢地握住所述药物的剂量,并继续握着它,直到所述机械臂将其移动到上述递送箱的位置,即所述计算机系统终止所述杯对所述药物剂量的握持并将所述剂量存入所述递送箱的位置。
优选地,其中所述计算机通过产生启动所选动作的信号来终止所述真空杯对所述药物剂量的握持由一组组成:终止所述真空诱导器的操作,并通过逆转所述真空杯与所述真空诱导器之间的气流仪器,所述计算机确定所述真空杯是否在通过接收一个事件的信号来安全地持有药物的剂量,所述事件选自一组包括:气压变化、气流变化、力的变化,和重量的变化,其中所述真空杯的铰接体位于所述真空杯的所述宽而柔韧的药丸接触面附近的至少一个波纹管截面,还包括一种设备,用于扫描打印的处方信息声明,将药物存储在特定的存储箱中所述计算机控制器系统,以及包括光学字符识别软件在内的软件,在所述计算机控制器系统中,将所述处方信息转换为所述计算机控制器系统可使用的形式确定何时分发处方信息中确定的药物,所述打印报表的系统是从一组中选择的,包括处方容器上的标签和包含处方信息的表格。
一种定期向至少一人分发多种药物的方法,包括以下步骤:
a.提供多个储物箱储存特定药物的剂量,
所述多个储物箱中的每个储物箱被指定仅存放一种指定药物的剂量;
b.提供一种探头,探头端部有吸盘,所述探头端部有吸盘,可以在所述存储箱之间移动,所述探头可以抓取位于上述任何一个药箱上的药物剂量激活将气动真空系统连接到所述吸盘上,并将所述探头与所述吸盘一起移动,将所述吸盘上的剂量抓取到输送箱中并存入所述输送箱,其中所述吸盘具有铰接体围绕着与真空相通的中空内部系统在所述吸盘铰接体的第一端的开口上,以及在所述第二端的大唇形表面上,所述大唇形表面具有其中心的孔,其开口进入所述空心内部,所述吸盘由软而柔软的橡胶状材料制成;
c.提供一种计算机系统,该计算机系统可编程控制所述探头的操作,并将所述探头与所述吸盘连接在一起按顺序操作:
1.在预先设定的时间内,使用所述探针和吸盘将所述储药箱预先设定的药物剂量移动到所述投递箱;
2.表示所述的投递箱中装满了患者在预定时间内预定的消费剂量;
3.继续发送药物剂量已经准备好可以使用的信号,直到传感器显示剂量已经准备好从所述投递箱中取出;
4.在所述计算机的内存中记录药物剂量已从所述投递箱中取出的事实;
5.提供药品的配药剂量信息以前记录到不同的护理人员和提供者的投递箱;和定期进行清洗循环,从所述探头和所述吸盘中清除颗粒物。
优选地,用于将药物剂量装入所述多个所述存储箱的预先指定的存储箱中;
包括以下步骤:
a.启动计算机程序启动药物剂量加载程序;
b.指示要装载的药物剂量是否为新的处方,或者已有的处方已经储存在指定的储存箱内的;
c.如果处方已被指明是已储存在指定储存箱内的现有处方,则运行以下子程序:
1.审查上述计算机系统中现有处方信息;
2.根据选定的处方对计算机系统中的信息进行更正;和
3.验证以上步骤c.ii完成后信息的正确性;
4.将现有处方的新调解剂量存放于上述指定的特定储物箱内;
d.如果上述处方是新的,则运行以下子程序:
1.从上述多个储物箱中指定一个可用的空储物箱作为储存
新处方将储存在;
2.将有关新处方的信息输入该计算机系统;
3.确认新处方信息正确;
4.将新处方的调解剂量存入上述预先指定的新处方贮存箱,其中输入有关新信息的步骤从一组处方中选择处方组成:通过电脑触摸屏手动输入处方上的信息,扫描在图像中处方信息从标签或单上的处方信息,其中输入处方信息的步骤是关于处方输入以下信息的步骤:
1.药物名称;
2.处方医师;
3.插入的剂量数;
4.每一剂量的药量;
5.服药时间和剂量。
3.有益效果
相比于现有技术,本发明的优点在于:
(1)本发明中,该系统以真空为基础的探头,可以拾起并牢牢抓住和携带各种各样的药物,使它更容易加载药物直接进入系统。
(2)本发明中,该系统能够有效且无事故地将用于存储箱的药物转移到配药器或交付本人。
(3)本发明中,该系统可以存储至少15种不同药物,最多可存储一个月的药物。
(4)本发明中,该系统可以通过编程定期分发几种药物如果有必要,一天几次。
(5)本发明中,该系统一旦被编程,用户将不再需要担心记住什么时候服用他或她的药物,以及他或她是否服用了药物。
附图说明
图1为本发明一个实施例的主要功能子系统的框图;
图2为本发明的机械手总成和卡盘总成实施例的凸起透视图;
图3为图2所示实施例的侧视图;
图4为图2所示实施例的俯视图;
图5为气动真空系统实施例各部件的框图;
图6为取药用真空杯实施例的透视图;
图7为图6所述真空杯实施例的近端丸接触面及位于其中心的丸接触孔的底图;
图8为图6所示的真空杯实施例的局部裁剪视图;
图9为本发明的真空杯取不同形状和大小的药物的例子;
图10描绘了计算机接收到的压力信号;
图11A是药物存储箱实施例的透视图;
图11B为图11A所述药物贮存箱实施例的俯视图;
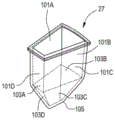
图12是该存储箱的另一个实施例的透视图,该存储箱也可作为分发箱使用;
图13A为图12所示存储箱的前视图;
图13B为图12所示储物箱侧视图;
图13C为图12所示存储箱侧视图;
图13D为图12所示存储箱的俯视图;
图14是本发明的系统在使用过程中可以容纳的外壳或外壳的实施例的透视图;
图15是用于输入信息、显示信息和数据以及控制系统的计算机屏幕实施例的视图;
图16A是一个流程图,展示了在储物箱中装满药物时,部分基本系统操作的实施例;
图16B是图16A流程图的延续;
图16C是图16A流程图的延续;
图16D是图16A流程图的延续;
图17是计算机运行的基本程序的实施例程的流程图,该程序用于在预定的时间填充配药池进行配药;
图18A是本发明装置实施例的透视图
图18B是本发明用于将处方容器的标签上的信息扫描到处方容器的实施例的透视图
图19提供了本发明编组、存储和分配装置的另一种变体的壳体的透视图;
图20提供了图19所示的本发明变体的内部透视、侧视和俯视图。
图21为本发明的结构示意图;
图22为本发明装药杯处的结构示意图;
图23为本发明吸力搅拌爪处的结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
实施例1:
图1是主体实施例的主要部分框图,一台可编程计算机控制着系统的运行。该系统包括一个带储物箱的旋转木马组件和一个分配箱12,一个机械手组件13,其中包括一个真空或吸盘,用于在存储器中取药并将药物移动到配药箱中,以及一个真空系统14,该真空系统14产生真空,从而使真空杯能够将药物抓取到存储箱中并将其移动到配药箱中。压力传感器和/或空气流量传感器18,以确定是否和何时这个真空杯夹住了一剂药。重量传感器20来验证内容存储箱和分配箱,等等。该系统包括通信能力15和电源17。
本实施例中,图2是旋转木马和机械手的俯视图,药物配药装置的装配13。其中包括一个旋转木马和机械臂。所述旋转木马的外围设置有分配箱29和多个存储箱27在图2中,有15个存储箱27可以存储多达15种不同的药物,而只有一个分配箱29。在这个实施例,优化了所述箱的外部形状,使其适合于旋转木马上的16个箱、用于存放药物的15个箱和用于分发药物的1个箱。每个储物箱包含用户任意设置的特定药物,在所示的实施例中,传送带23的直径为10英寸,其周围的16个箱体共有15个存储空间第27个垃圾桶和第29个分配垃圾桶,传送带的大小和箱体的数量可以根据需要改变。
本实施例中,机械手25有一个真空探头31,探头的末端是真空杯33。真空探头仰角电机37位于机械手25的上部,所示实施例中的真空探头提升电机37 提供了提升和降低真空探头31的方法。与机械臂底部相连的是机械臂旋转电机 35。机械臂旋转电机下方是旋转木马旋转电机39,图3是旋转木马和机械手13 的俯视图,其中机械手旋转电机35将机械手25移动到所处位置,带真空杯33 的真空探头31在配药箱29的上方,分配器杯36位于分配器箱的下方。真空探头31穿过机械臂支撑48边缘的套筒46。真空探头31可自由上箭头45和下箭头47滑进套管46。套管46保持真空探头31受垂直方向线性运动的限制。此外,可见旋转木马23旋转电动机39。旋转电机39是由计算机控制的,它可以根据需要移动传送带,图3还提供了连接真空探头的软管34的更好的真空探头31 至其余气动真空系统49。柔性软管34有足够的松弛度,允许真空探头31向上和向下运动,将真空杯33插入每个药箱中提取药物,然后移出药箱,这样机械手25就可以将真空探头31旋转到下一个选定的药箱中。
本实施例中,图4提供了旋转木马12和机械手13的俯视图。电缆40一端连接到真空探头31的上端,另一端连接到真空探头31的上端,电缆40连接到滑轮42上。当滑轮42顺时针方向转动时,电缆40绕到滑轮42上,当滑轮42 逆时针方向转动时,电缆40绕到滑轮42上,传动皮带28动态连接皮带轮42 和传动轴44。驱动轴44由电机37驱动。因此,当驱动轴44由电机37带28运动顺时针方向移动,并使滑轮42顺时针方向移动,电缆40到皮带轮42滑轮上的卷轴。这进而导致探针31向上移动45。当驱动轴44由电机37带28逆时针方向移动时,转动计数器中的滑轮顺时针方向旋转,使电缆40从滑轮42上滑脱,从而使真空探头31向下移动47,由电机35提供的机械手25的旋转运动。真空探头31的平移运动上45和下47由电机37、滑轮42和电缆40连接到端部真空调查31。计算机控制机械臂25,从而控制电机35和电机37的工作,通过将机械臂25旋转到电机35所在的位置,然后降低和升高真空探头31,从而将真空探头31定位在所选的存储箱或分配箱上,用马达37将药物从储物箱中取出并送到配药箱。软管34有足够的松弛度,允许真空探头31上下移动同时保持真空系统密封的完整性。
本实施例中,在操作每个储物箱27都装有使用本发明的药物分配系统的患者所处方的特定药物。在图2、图3和图4所示的版本中,这是针对多达15种不同药物的,参照图4,机器人旋转电机35以顺时针43或逆时针41的方向旋转机器人手臂25,将真空探头31置于预先选定的储存箱27的特定药物上分发。
本实施例中,参照图2,机器人手臂在启动仰角电机37时,将真空探头31 向下移动47,使真空杯33能够进行一次剂量的药物存放于特定的药箱27号选定,当33号真空杯与药物剂量建立正接触真空系统,该系统已被激活,产生真空或吸力效果,使真空杯牢牢地握住剂量的药物。封严后,将真空探头31抬起 45,使所附药品的真空杯33脱离药箱27。此外,防止药物储存在每个药箱27 表格卡住或卡住每个药箱都有一个搅拌器来摇动它,把可能卡住的药物取出来,参照图3,机械臂25然后顺时针或逆时针旋转,直到真空探头31、真空杯33,以及所持药物真空杯置于分配箱或传送箱29的上方。此时,由33号真空杯所持的药物的剂量被释放出来,并落入29号配药箱。
本实施例中,系统可以从负气压切换到正气压从而迫使或推动药物进入29 号仓。机械臂25按顺序移动到每个储物箱中,每个储物箱中都有一个特定的药物要在预定的时间分配给病人,用真空杯把它拿起来,然后存放药物进入配药箱 29。直到所有的病人预定在预定时间服用的药物在配药箱29,图5是用于移动的真空系统49的基本部件框图,从药箱到配药箱的药物剂量。基本部分是真空泵51、真空杯33、控制阀53、气密真空管55通过真空泵51的探头31连接到真空杯33,并有压力和空气流量传感器18。电源为系统提供能量,计算机控制操作。
本实施例中,计算机11将带有真空探头31和真空杯33的机械手置于预先选定的存储箱上方,并将真空探头31放低至所述的真空杯涉及储存在药箱中的药物剂量,并与所述药箱中的药物剂量83正接触并成功取药,图9提供了杯子 33的例子吸引和掌握不同形状和大小的药物83。真空泵位于机械臂25中,通过真空空气管道55与真空杯33连接,如图5所示。然而,另一种选择实施例所述真空电机可位于真空杯33的末端附近调查31。
本实施例中,可以使用压力计或重量传感器来确定真空杯33何时使用了药物剂量。在这样一个系统中,电脑11接通后将启动真空泵51和控制阀53,在空气管道55或低于大气压时产生真空并引起吸力33号杯的接触和拿起一剂药,并在真空诱导下握紧。附在身体的一端是61一种金属连接器,其螺纹为64,用于将真空杯33连接到真空探头31上,所示实施例依次通过软管34和真空空气导管55连接到真空系统49的其余部分。真空杯的真空端67位于阀体61的末端,与金属接头63相对。真空杯33的主体61是铰接的,在这里实施例采用波纹管结构65的形式,该结构增加了杯33的灵活性和柔韧性,从而能够安全地将表面 68与剂量相匹配药物创造一个安全的空气密封。
本实施例中,重量发生显著的变化。如图9所示,33号真空杯分别取球形、蛋形,真空杯33的真空端67已经很容易地将它的接触面包裹在每一剂药物的周围,并通过在孔板69处产生的真空吸力将其牢牢地吸住。图9仅供说明之用;使得真空杯的真空端67可以形成一个完整的密封,这样就可以握住药丸并且在不掉落的情况下移动它。波纹管65部分增加连接到33号真空杯本体,从而提供更大的灵活性,如图5、6、7、8所示,真空或吸力端67是由一个大的唇状结构形成的,该结构向外延伸,像一个圆盘形的法兰70,在孔径69附近形成药丸接触面68。
本实施例中,图11A是存储箱27的一个实施例的透视图。为了便于说明,在图11A中,箱子的内部表面用虚线表示。27号仓有四个上部101A、101B、101C 和101D,药箱就可以装很多药片或其他类似的药物。101A、101b、101C和101D 的端面底部坡度更陡,墙体103A、103B、103C、103D,由于它们的陡度形成了一个漏斗状,终止于闭合的v形底部105。
本实施例中,开始收集115井。收集井115由113A、113B、113C侧和109B 侧的一部分组成。肩部114A连接侧面109A和侧面113A、肩部114B连接侧面109C 和侧面113B。107的底部由117的底部组成。由此可见,在操作机械臂时提取药物,从107号井沿159B井壁向下进入115号井。可以看出,药物的剂量是从存储箱107中提取的,其余剂量为药物会自然地下降到115井,直到垃圾桶空了。如果由于某种原因是药物的剂量记录和不移动的垃圾桶可以摇到,每个料仓都具有自己的振动机构,回收箱107也可用作分配器或投递箱29。唯一的修改是去除底部117形成一个开口底部通过剂量的药物可落入36个容器中,如图2和3 所示,置于开口下方形成117收集药物剂量,机械臂将药物储存在配药箱或投递箱中。
本实施例中,图15是计算机显示器161的一个实施例,它将出现在图形用户界面153上,按下enter键173就会被保存到计算机上,图16A为上述基本储仓装载程序的初始步骤流程图。当需要在系统中放置药物时,用户点击屏幕201 激活系统。
本实施例中,在图16C中提供了扫描处方容器标签或信息表图像的选项。计算机将是使用所需的光学字符识别软件(OCR)和附加软件编程,将药物装入系统进行评审和纠正,然后再最终确定,图18A提供了用于扫描的系统实施例的视图,资料来自载有处方资料的药厂所提供的表格。303页将以标准方式由成像装置 301。
本实施例中,图20提供了本发明变型装置401内部机构的侧视图。旋转电机419是由计算机控制旋转和位置旋转木马23。执行机构423或真空探头旋转电机定位装置由旋转电机427和arm429组成。由计算机控制的旋转电机427,在旋转运动中移动arm429。真空探头417通过旋转电机427连接到arm429的末端,并通过旋转电机427移动arm429,将真空探头417置于所选的药箱27上,从所选的药箱27中提取药物并将其放入分配杯中,图20提供了401装置内部机构的俯视图,去掉了425盖。由于箱子里装满了药物,传送带就被旋转到将为特定药物选择的药箱依次放置在409滑槽下。然后用旋转电机427旋转Arm429,使其与预先选择的药物一起置于存储箱27之上。然后旋转臂将自己置于分配杯上方的分配端口421之上。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
Claims (10)
1.一种具有自动分药功能的自动分药箱,其特征在于,包括:
a.外围有多个药箱的传送带,其中所述的药箱之一为配药箱,所述的剩余药箱为特定药物的贮存箱;
b..一种机器手臂,能够定位提取的剂量,从所述储物箱中取出药物,并将提取的药物存放于所述配药箱中;
c.所述机械臂有一个真空探针与远端连接到一个真空诱导系统和近端说年底真空探头连接到一个真空的杯子铰接体封闭室内室和一个孔在中心的真空保温杯表示,年底通向内腔,其中所述内腔处于流体通信中,通过具有所述真空诱导系统的所述探头的内部通道;
d.所述真空杯的真空端由所述真空杯定位探针接触表面的一种药物剂量,在开始说真空诱导系统,所述真空杯的真空端牢牢握住所述药物的剂量,所述机械手将其移动到所述配药箱;
e.一种计算机控制器系统,其中注册了存储在特定标识的存储箱内的特定药物,并且在所述控制器中系统控制所述机械臂的操作,从而指导所述机械臂从指定的存储箱中提取药物剂量,并在预定的时间将药物剂量存入所述分配箱中。
2.权利要求1中所述的设备,其中所述存储箱的形状是向所述机械臂(如所述探头上的真空杯)提供所述药物剂量连接到所述机械臂上的所述机械臂可以在所述机械臂上的预定位置接合所述机械臂上的所述机械臂,其中所述存储箱的形状使其具有较大的上部存储区域和较低的漏斗形区域,所述较低的漏斗形区域将范围缩小到一个终止点,当所述药箱中的其他药量被移除时,存储在药箱中的药物剂量将被吸引到该终止点。
3.权利要求1所述的装置,其中所述铰接体包括一个内腔,其至少有一个波纹管部分与所述真空端相邻,所述真空端是围绕所述孔的宽柔性表面,其中所述真空杯的所述孔小于所述真空端尺寸的四分之一,其中所述孔的直径为0.25英寸,所述真空端部的直径为1.25英寸。
4.权利要求1所述的装置,包括用于覆盖和包含用于编组和分发多种药物的所述装置的壳体,所述壳体的外围至少有一个用于存储非所述药物的隔间以固体药物剂量的形式分发的,其中所述隔间可容纳从一组药物中选择的容器中分发的药物;吸入器、药膏管和注射器,其中具有铰接体的真空杯包括至少两个波纹管部分,其中所述计算机确定所述真空杯是否已使用药物剂量,并在接收到an的信号后紧紧握住从一组事件中选择的事件,包括:气压变化、气流变化、力的变化和重量的变化。
5.权利要求1的装置,包括扫描打印的声明的装置,一种药物的处方信息被存储在一个特定的存储箱内所述计算机控制器系统,以及包括光学字符识别软件在内的软件,在所述计算机控制器系统中,将所述处方信息转换为所述计算机控制器系统可使用的形式确定何时分发处方信息中确定的药物,所述打印报表的设备是从一组中选择的,该组包括:处方容器上的标签和包含处方信息的表格,其中所述真空系统诱导系统能够逆转气流,从而从所述真空杯所持药物的剂量中清除引入所述真空诱导系统的微粒物质。
6.权利要求1的装置,包括通信装置,该通信装置使所述计算机能够将具有预定信息的信号发送到电子设备通信设备,选择所述电子通信装置的索赔装置从选定的一组手机、平板电脑、电脑或普通手机组成。
7.一种以固体剂量的形式向个人分发多种药物的系统,其特征在于,包括:
a.用于控制所述系统操作的可编程计算机;
b.旋转木马围绕其中心点旋转,外围有多个储物箱,外围至少有一个投递箱;
c.带有真空探头的机械臂,其中所述机械臂配置为可在所述箱体中移动并将所述真空探头插入所述任何一个箱体中根据所述计算机的指示,设置多个存储箱和至少一个投递箱;
d.与所述探头的第一端连接的真空发生装置;
e.一种真空杯,其具有环绕内部空间的铰接体,附着于所述探头的第二端,所述真空发生装置与所述真空杯的内部空间通过流体通信
所述探头具有中空内部,在其之间形成流体连接;
f.所述真空杯,其具有宽而柔软的药丸接触面,所述药丸接触面围绕着通向所述杯的所述内部空间的孔;和
g.其中所述探针的第二端插入所述多个存储箱中的任何一个,所述真空杯的药丸接触面与所述药物剂量接触并产生真空,所述真空杯装置正在工作,它能牢牢地握住所述药物的剂量,并继续握着它,直到所述机械臂将其移动到上述递送箱的位置,即所述计算机系统终止所述杯对所述药物剂量的握持并将所述剂量存入所述递送箱的位置。
8.权利要求7所述系统,其中所述计算机通过产生启动所选动作的信号来终止所述真空杯对所述药物剂量的握持由一组组成:终止所述真空诱导器的操作,并通过逆转所述真空杯与所述真空诱导器之间的气流仪器,所述计算机确定所述真空杯是否在通过接收一个事件的信号来安全地持有药物的剂量,所述事件选自一组包括:气压变化、气流变化、力的变化,和重量的变化,其中所述真空杯的铰接体位于所述真空杯的所述宽而柔韧的药丸接触面附近的至少一个波纹管截面,还包括一种设备,用于扫描打印的处方信息声明,将药物存储在特定的存储箱中所述计算机控制器系统,以及包括光学字符识别软件在内的软件,在所述计算机控制器系统中,将所述处方信息转换为所述计算机控制器系统可使用的形式确定何时分发处方信息中确定的药物,所述打印报表的系统是从一组中选择的,包括处方容器上的标签和包含处方信息的表格。
9.一种定期向至少一人分发多种药物的方法,包括以下步骤:
a.提供多个储物箱储存特定药物的剂量,
所述多个储物箱中的每个储物箱被指定仅存放一种指定药物的剂量;
b.提供一种探头,探头端部有吸盘,所述探头端部有吸盘,可以在所述存储箱之间移动,所述探头可以抓取位于上述任何一个药箱上的药物剂量激活将气动真空系统连接到所述吸盘上,并将所述探头与所述吸盘一起移动,将所述吸盘上的剂量抓取到输送箱中并存入所述输送箱,其中所述吸盘具有铰接体围绕着与真空相通的中空内部系统在所述吸盘铰接体的第一端的开口上,以及在所述第二端的大唇形表面上,所述大唇形表面具有其中心的孔,其开口进入所述空心内部,所述吸盘由软而柔软的橡胶状材料制成;
c.提供一种计算机系统,该计算机系统可编程控制所述探头的操作,并将所述探头与所述吸盘连接在一起按顺序操作:
1.在预先设定的时间内,使用所述探针和吸盘将所述储药箱预先设定的药物剂量移动到所述投递箱;
2.表示所述的投递箱中装满了患者在预定时间内预定的消费剂量;
3.继续发送药物剂量已经准备好可以使用的信号,直到传感器显示剂量已经准备好从所述投递箱中取出;
4.在所述计算机的内存中记录药物剂量已从所述投递箱中取出的事实;
5.提供药品的配药剂量信息以前记录到不同的护理人员和提供者的投递箱;和定期进行清洗循环,从所述探头和所述吸盘中清除颗粒物。
10.权利要求9的方法包括编程所述计算机,用于将药物剂量装入所述多个所述存储箱的预先指定的存储箱中;
包括以下步骤:
a.启动计算机程序启动药物剂量加载程序;
b.指示要装载的药物剂量是否为新的处方,或者已有的处方已经储存在指定的储存箱内的;
c.如果处方已被指明是已储存在指定储存箱内的现有处方,则运行以下子程序:
1.审查上述计算机系统中现有处方信息;
2.根据选定的处方对计算机系统中的信息进行更正;和
3.验证以上步骤c.ii完成后信息的正确性;
4.将现有处方的新调解剂量存放于上述指定的特定储物箱内;
d.如果上述处方是新的,则运行以下子程序:
1.从上述多个储物箱中指定一个可用的空储物箱作为储存
新处方将储存在;
2.将有关新处方的信息输入该计算机系统;
3.确认新处方信息正确;
4.将新处方的调解剂量存入上述预先指定的新处方贮存箱,其中输入有关新信息的步骤从一组处方中选择处方组成:通过电脑触摸屏手动输入处方上的信息,扫描在图像中处方信息从标签或单上的处方信息,其中输入处方信息的步骤是关于处方输入以下信息的步骤:
1.药物名称;
2.处方医师;
3.插入的剂量数;
4.每一剂量的药量;
5.服药时间和剂量。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910660115.6A CN110772427A (zh) | 2019-07-22 | 2019-07-22 | 一种具有自动分药功能的自动分药箱 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910660115.6A CN110772427A (zh) | 2019-07-22 | 2019-07-22 | 一种具有自动分药功能的自动分药箱 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN110772427A true CN110772427A (zh) | 2020-02-11 |
Family
ID=69383846
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201910660115.6A Pending CN110772427A (zh) | 2019-07-22 | 2019-07-22 | 一种具有自动分药功能的自动分药箱 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN110772427A (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113978938A (zh) * | 2020-10-26 | 2022-01-28 | 北京印刷学院 | 一种储药装置药品余量的检测系统及方法 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103142412A (zh) * | 2012-12-19 | 2013-06-12 | 苏州艾隆科技股份有限公司 | 自动配药机的配药方法及系统 |
| CN103238166A (zh) * | 2011-02-14 | 2013-08-07 | 株式会社汤山制作所 | 配药确认装置 |
| CN105726317A (zh) * | 2016-03-23 | 2016-07-06 | 王志宏 | 一种自动配药装置 |
| CN106377426A (zh) * | 2016-09-29 | 2017-02-08 | 哈尔滨医科大学 | 一种注射器自动配药装置 |
| CN106794116A (zh) * | 2014-10-31 | 2017-05-31 | 株式会社汤山制作所 | 药剂配发装置 |
| CN108910530A (zh) * | 2018-08-31 | 2018-11-30 | 上海擅韬信息技术有限公司 | 一种取放机构 |
| CN208499523U (zh) * | 2018-08-01 | 2019-02-15 | 河北盛世天昕电子科技有限公司 | 配药器装置及配药系统 |
| CN208629468U (zh) * | 2018-08-01 | 2019-03-22 | 河北盛世天昕电子科技有限公司 | 真空机械手装置及配药系统 |
-
2019
- 2019-07-22 CN CN201910660115.6A patent/CN110772427A/zh active Pending
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103238166A (zh) * | 2011-02-14 | 2013-08-07 | 株式会社汤山制作所 | 配药确认装置 |
| CN103142412A (zh) * | 2012-12-19 | 2013-06-12 | 苏州艾隆科技股份有限公司 | 自动配药机的配药方法及系统 |
| CN106794116A (zh) * | 2014-10-31 | 2017-05-31 | 株式会社汤山制作所 | 药剂配发装置 |
| CN105726317A (zh) * | 2016-03-23 | 2016-07-06 | 王志宏 | 一种自动配药装置 |
| CN106377426A (zh) * | 2016-09-29 | 2017-02-08 | 哈尔滨医科大学 | 一种注射器自动配药装置 |
| CN208499523U (zh) * | 2018-08-01 | 2019-02-15 | 河北盛世天昕电子科技有限公司 | 配药器装置及配药系统 |
| CN208629468U (zh) * | 2018-08-01 | 2019-03-22 | 河北盛世天昕电子科技有限公司 | 真空机械手装置及配药系统 |
| CN108910530A (zh) * | 2018-08-31 | 2018-11-30 | 上海擅韬信息技术有限公司 | 一种取放机构 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113978938A (zh) * | 2020-10-26 | 2022-01-28 | 北京印刷学院 | 一种储药装置药品余量的检测系统及方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11896556B1 (en) | Apparatus and method for dispensing medication | |
| US6732884B2 (en) | Bulk medication dispenser and monitoring device | |
| US5838575A (en) | System for dispensing drugs | |
| US8596309B2 (en) | Medication mixing device and medication mixing method | |
| EP3429547B1 (en) | Automated medication adherence system | |
| US5812410A (en) | System for dispensing drugs | |
| US5562232A (en) | Semi-automated medication dispenser | |
| US5571258A (en) | Semi-automated medication dispenser | |
| CA2922451C (en) | Object dispenser having a variable orifice and image identification | |
| US8032252B2 (en) | Items dispenser | |
| US20100256808A1 (en) | Method And Apparatus For Dispensing Medicine | |
| CN105726317A (zh) | 一种自动配药装置 | |
| TW201235034A (en) | Medication supplying apparatus and medication counting apparatus using the medication supplying apparatus | |
| JPH08511963A (ja) | 真空作動薬剤分配装置 | |
| US11285083B1 (en) | Apparatus and method for dispensing medication | |
| US20190228852A1 (en) | Automated Medication Adherence System | |
| CN115227582B (zh) | 视觉分药方法、电子设备及存储介质 | |
| CN110772427A (zh) | 一种具有自动分药功能的自动分药箱 | |
| KR102451175B1 (ko) | 로봇 기술을 통하여 제약품을 포장하기 위한 분배 캐니스터 | |
| CN112076087A (zh) | 一种基于数据库的面部识别配药装置 | |
| CN115231270B (zh) | 分药机器人 | |
| CN111743774B (zh) | 一种智能喂药系统 | |
| CN105620935A (zh) | 一种基于紧凑型医药装置提高病人服药准确性的方法 | |
| CN115285523B (zh) | 一种定时自动配料的储物盒 | |
| US5016766A (en) | Anti-contamination orthodontic device dispenser |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| RJ01 | Rejection of invention patent application after publication | ||
| RJ01 | Rejection of invention patent application after publication |
Application publication date: 20200211 |