Six engravers
Technical Field
The invention relates to a jade carving device, in particular to a six-axis carving machine.
Background
The jade culture is popular with Chinese people, and in order to pursue artistic effects, people can not only meet the delicacy of the outer contour of the handicraft, but also have stronger artistic effects because the hollow jade ware can transmit light.
However, the hollow jade article has a large difficulty in carving the interior, and particularly, in a human body image, an animal model and the like, the hollow part is relatively bent, and the difficulty in carving the interior is large.
Disclosure of Invention
The technical problem to be solved by the invention is as follows: how to design the carving equipment of the hollow jade article is convenient for the inner part of the hollow jade article to be carved.
The technical scheme of the invention is as follows:
a six-axis engraving machine comprises an up-and-down moving frame supported on a slide rail, wherein the moving frame and a screw form a screw lifting mechanism, and the upper part of the screw is provided with a driving screw motor which is rotationally connected with the screw; an adjusting part is fixed on the movable frame, and a nicking tool driven by a motor is fixed on the adjusting part; slide rail bottom one side sets up the carousel, regulating part includes pars contractilis and rotating part, and the pars contractilis is the base and fixes electric putter on removing the frame, and the rotating part is fixed on electric putter's telescopic link, is connected through first hollow disc step motor between telescopic link and the rotating part.
Be connected through first hollow disc step motor between telescopic link and the rotating part, specifically do: the telescopic rod of the electric push rod is fixed on the inner wall of the rotating pipe of the rotating part, the contact surface of the electric push rod and the rotating pipe is vertical to the axial lines of the electric push rod and the rotating pipe, and when the first hollow disc-shaped stepping motor rotates, the rotating pipe rotates relative to the electric push rod; the front end of rotatory pipe is connected with the rear end face contact of operation pipe, specifically is: the rear end face of the operation pipe and the front end face of the rotary pipe are second contact faces, the second contact faces and the axes of the rotary pipe and the operation pipe are acute angles, a shell of a second hollow disc-shaped stepping motor is fixed on the inner wall of the rear end of the operation pipe, an output shaft tube of the second hollow disc-shaped stepping motor is fixed on the inner wall of the front end of the rotary pipe, and when the second hollow disc-shaped stepping motor rotates, the included angle of the axes between the operation pipe and the rotary pipe changes.
Set up the crooked pipe between the front end of rotatory pipe and the rear end face of operation pipe, the front end of rotatory pipe is connected with the rear end face contact of crooked pipe, specifically is: the rear end surface of the bent pipe and the front end surface of the rotating pipe are third contact surfaces, the rotating pipe and the axis of the operation pipe are acute angles, a shell of a third hollow disc-shaped stepping motor is fixed on the inner wall of the rear end of the operation pipe, an output shaft tube of the third hollow disc-shaped stepping motor is fixed on the inner wall of the front end of the rotating pipe, and when the third hollow disc-shaped stepping motor rotates, the included angle of the axis between the operation pipe and the rotating pipe changes;
the preceding terminal surface of crooked pipe and the rear end face contact of operation pipe specifically are: the contact surface, the axes of the bending pipe and the operation pipe are all acute angles, a shell of a fourth hollow disc-shaped stepping motor is fixed on the inner wall of the front end of the bending pipe, an output shaft tube of the fourth hollow disc-shaped stepping motor is fixed on the inner wall of the rear end of the operation pipe, and when the fourth hollow disc-shaped stepping motor rotates, the axis included angle between the operation pipe and the bending pipe changes;
the hollow part in the operation pipe is fixed with a carving motor, an output shaft of the carving motor is fixed with a clamping mechanism for clamping a rod handle of the grinding head, and a bearing is fixed between the clamping mechanism and the inner wall of the operation pipe.
The turntable is driven by a turntable motor.
The first stepping motor, the second stepping motor, the third stepping motor and the fourth stepping motor are servo motors.
Compared with the prior art, the rotary engraving machine is provided with the vertically moving frame which is supported on the sliding rail and driven by the screw rod, and the rotary table, so that the height of the engraving drill bit can be adjusted according to engraving objects with different heights, multi-angle engraving can be performed, and both inside and outside can be engraved.
Drawings
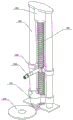
FIG. 1 is a schematic diagram of the present invention.
Fig. 2 is a schematic view of the regulating part of the present invention.
Fig. 3 is a schematic view of the present invention in use (telescoping).
Fig. 4 is a schematic view of a rotating portion according to the present invention.
FIG. 5 is a cross-sectional view of FIG. 4 in accordance with the present invention.
FIG. 6 is a rotated view of FIG. 5 in accordance with the present invention.
Fig. 7 is a schematic view of another rotating portion according to the present invention.
FIG. 8 is a cross-sectional view of FIG. 7 in accordance with the present invention.
Fig. 9 is a rotated view of fig. 8 in accordance with the present invention.
FIG. 10 is a schematic illustration of the process section of the present invention.
Fig. 11 is a schematic view of a nicking tool of the present invention.
Detailed Description
As shown in fig. 1 to 11, a six-axis engraving machine includes an up-down moving frame 400 supported on a sliding rail 200, the moving frame 400 and a screw 300 constitute a screw lifting mechanism, and a screw driving motor 100 is disposed at the upper part of the screw 300 and rotatably connected to the screw 400; an adjusting part 500 is fixed on the moving frame 400, and a nicking tool driven by a motor is fixed on the adjusting part 500; slide rail 200 bottom one side sets up carousel 600, regulating part 500 includes pars contractilis 510 and rotating part 520, and pars contractilis 510 is the base 512 fix electric putter on removing frame 400, and rotating part 520 is fixed on electric putter's telescopic link 511, is connected through first hollow disc stepper motor between telescopic link 511 and the rotating part 520.
The telescopic rod 511 is connected with the rotating part (520) through a first hollow disc-shaped stepping motor, and specifically comprises: the end of the extension rod 511 of the electric putter is fixed to the housing of the first hollow disc-shaped stepping motor, the output shaft tube 524 of the first hollow disc-shaped stepping motor is fixed to the inner wall of the rotary tube 521 of the rotary part 520, the contact surface of the electric putter and the rotary tube 521 is perpendicular to the axis of the electric putter and the rotary tube 521, and when the first hollow disc-shaped stepping motor rotates, the rotary tube 521 rotates relative to the electric putter.
The front end of the rotary pipe 521 is in contact connection with the rear end face of the operation pipe 523, specifically: the rear end surface of the working pipe 523 and the front end surface of the rotating pipe 521 are a second contact surface, the second contact surface and the axes of the rotating pipe 521 and the working pipe 523 are acute angles, the inner wall of the rear end of the working pipe 523 is fixed with the shell of the second hollow disc-shaped stepping motor, the output shaft pipe 525 of the second hollow disc-shaped stepping motor is fixed on the inner wall of the front end of the rotating pipe 521, and when the second hollow disc-shaped stepping motor rotates, the included angle of the axes between the working pipe 523 and the rotating pipe 521 is changed. As shown in fig. 5 and 6, the variation range is 0 to 180 degrees, the sum of the included angle between the second contact surface and the axis of the rotary pipe 521 and the included angle between the second contact surface and the axis of the working pipe 523 is subtracted, and when the included angle between the second contact surface and the axis of the rotary pipe 521 and the included angle between the second contact surface and the axis of the working pipe 523 are both small enough, the hollow disc-shaped stepping motor is combined to rotate, so that most of the inner spherical surface can be carved.
Set up crooked pipe 522 between the front end of rotatory pipe 521 and the rear end face of operation pipe 523, the front end of rotatory pipe 521 is connected with the rear end face contact of crooked pipe 522, specifically is: the rear end surface of the curved pipe 522 and the front end surface of the rotary pipe 521 are third contact surfaces, the third contact surfaces and the axes of the rotary pipe 521 and the operation pipe 523 are all acute angles, a housing of a third hollow disc-shaped stepping motor is fixed on the inner wall of the rear end of the operation pipe 523, an output shaft 526 of the third hollow disc-shaped stepping motor is fixed on the inner wall of the front end of the rotary pipe 521, and when the third hollow disc-shaped stepping motor rotates, the included angle of the axes between the operation pipe 523 and the rotary pipe 521 is changed.
The front end face of the bent pipe 522 is in surface contact with the rear end face of the operation pipe, specifically: the contact surface and the axes of the bending pipe 522 and the working pipe 523 are acute angles, the shell of the fourth hollow disc-shaped stepping motor is fixed on the inner wall of the front end of the bending pipe 522, the output shaft tube 527 of the fourth hollow disc-shaped stepping motor is fixed on the inner wall of the rear end of the working pipe 523, and when the fourth hollow disc-shaped stepping motor rotates, the axis included angle between the working pipe 523 and the bending pipe 522 is changed; the third hollow disc-shaped stepper motor is combined with the fourth hollow disc-shaped stepper motor, as shown in fig. 8 and 9, the range of variation is 0 to 180 degrees, and the third hollow disc-shaped stepper motor and the fourth hollow disc-shaped stepper motor rotate, so that most of the inner ball surface can be engraved.
The carving motor 532 is fixed in the hollow part in the operation pipe 523, the output shaft 533 of the carving motor 532 fixes the clamping mechanism 535 for clamping the rod handle of the grinding head, and the bearing 534 is fixed between the clamping mechanism 535 and the inner wall of the operation pipe 523.
The turntable is driven by a turntable motor 700.
The first stepping motor, the second stepping motor, the third stepping motor and the fourth stepping motor are servo motors.
As shown in fig. 6, the grinding head is a stone grinding rod 541, a pointed rod 542, and a hooked lump rod 543. The graver portion of the stone grinder 541 is columnar, and the outer end portion thereof is smoothly transited; the nicking tool portion of the pointed rod 542 is tapered; the graver part of the lump hooking rod 543 is in a cake shape. This is prior art.
When the carving machine works specifically, all the motors are connected with the PLC, a fixed carving program is set, a proper carving knife is selected to be fixed on an output shaft of the carving motor, and different motor drives are selected according to different carving objects and carving positions. During carving, the carved object is placed on the rotary table, during rough carving, the rotary part is adjusted to be linear, the electric push rod is adjusted to stretch, and the adjusting frame is adjusted to move up and down to realize rough carving; during the finishing impression, rotate the lateral wall of the glyptic slot of angle of difference with the rotating part, carve the cavity through adjustment pars contractilis earlier during the sculpture cavity, the rotating part can collude back the sculpture and import the inside wall.
The foregoing is only a preferred embodiment of the present invention, and it should be noted that, for those skilled in the art, various changes and modifications can be made without departing from the overall concept of the present invention, and these should also be considered as the protection scope of the present invention.