CN111052009B - 控制系统、控制器和控制方法 - Google Patents
控制系统、控制器和控制方法 Download PDFInfo
- Publication number
- CN111052009B CN111052009B CN201980004100.2A CN201980004100A CN111052009B CN 111052009 B CN111052009 B CN 111052009B CN 201980004100 A CN201980004100 A CN 201980004100A CN 111052009 B CN111052009 B CN 111052009B
- Authority
- CN
- China
- Prior art keywords
- controller
- address
- controllers
- network
- control program
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images













Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Program-control systems
- G05B19/02—Program-control systems electric
- G05B19/04—Program control other than numerical control, i.e. in sequence controllers or logic controllers
- G05B19/05—Programmable logic controllers, e.g. simulating logic interconnections of signals according to ladder diagrams or function charts
- G05B19/054—Input/output
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L61/00—Network arrangements, protocols or services for addressing or naming
- H04L61/50—Address allocation
- H04L61/5007—Internet protocol [IP] addresses
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16Y—INFORMATION AND COMMUNICATION TECHNOLOGY SPECIALLY ADAPTED FOR THE INTERNET OF THINGS [IoT]
- G16Y40/00—IoT characterised by the purpose of the information processing
- G16Y40/30—Control
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L61/00—Network arrangements, protocols or services for addressing or naming
- H04L61/09—Mapping addresses
- H04L61/10—Mapping addresses of different types
- H04L61/103—Mapping addresses of different types across network layers, e.g. resolution of network layer into physical layer addresses or address resolution protocol [ARP]
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L61/00—Network arrangements, protocols or services for addressing or naming
- H04L61/50—Address allocation
- H04L61/5038—Address allocation for local use, e.g. in LAN or USB networks, or in a controller area network [CAN]
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L61/00—Network arrangements, protocols or services for addressing or naming
- H04L61/50—Address allocation
- H04L61/5046—Resolving address allocation conflicts; Testing of addresses
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L2101/00—Indexing scheme associated with group H04L61/00
- H04L2101/60—Types of network addresses
- H04L2101/618—Details of network addresses
- H04L2101/622—Layer-2 addresses, e.g. medium access control [MAC] addresses
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Computing Systems (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Programmable Controllers (AREA)
- Stored Programmes (AREA)
- Small-Scale Networks (AREA)
Abstract
提供在控制器(100A、100B、100C)之间利用相同控制程序(110)的情况下也能够成为可通信状态的技术。控制器(100A、100B、100C)具有存储装置(105),该存储装置(105)存储包含IP地址与标识符的对应关系的网络设定(108)、以及对驱动设备进行控制的控制程序(110)。控制程序(110)包含将上述标识符作为输入而对驱动设备进行控制的控制命令。控制器(100A、100B、100C)具有:生成模块(152),其以与同一网络上的其他控制器(100A、100B、100C)的IP地址不同的方式生成IP地址,改写网络设定(108)的IP地址;以及通信模块(154),其按照网络设定(108)的IP地址,与同一网络上的信息处理装置进行通信。
Description
技术领域
本公开涉及用于对控制装置自动设定IP(Internet Protocol:网络协议)地址的技术。
背景技术
在各种生产现场中,导入了PLC(Programmable Logic Controller:可编程逻辑控制器)、机器人控制器等产业用的控制装置(以下也称为“控制器”。)。控制器对各种产业用的驱动设备进行控制,由此使生产工序自动化。
有时多个控制器与相同网络连接。这些控制器构成为能够与上级的信息处理装置进行通信。上级的信息处理装置通过与各控制器进行通信,能够收集各控制器所控制的驱动设备的信息、各控制器的信息。为了使信息处理装置与各控制器进行通信,需要对各控制器进行网络设定(例如IP地址等)。
作为与控制器的网络设定有关的文献,例如存在日本特开2013-242629号公报(专利文献1)、日本特开2008-152799号公报(专利文献2)、日本特开2017-151934号公报(专利文献3)、日本特开2002-328706号公报(专利文献4)。
现有技术文献
专利文献
专利文献1:日本特开2013-242629号公报
专利文献2:日本特开2008-152799号公报
专利文献3:日本特开2017-151934号公报
专利文献4:日本特开2002-328706号公报
发明内容
发明要解决的课题
为了扩大生产现场的机器,有时希望复制与当前的机器相同的机器。该情况下,在其他控制器中也利用下载到控制器的驱动设备的控制程序。
在控制程序依赖于控制器的IP地址而对驱动设备进行控制的情况下,当控制程序被复制时,IP地址重复,控制程序不会正常进行动作。此外,网络设定重复,上级的信息处理装置无法与各控制器进行通信。为了解决这些问题,需要手动变更网络设定、控制程序的描述。但是,机器的规模越大,这种变更越花费劳力和时间。
本公开正是为了解决上述这种问题而完成的,某个方面的目的在于,提供在控制器之间利用相同控制程序的情况下也能够成为可通信状态的技术。
用于解决课题的手段
在本公开的一例中,控制系统具有:多个控制器,它们各自用于对作为控制对象的驱动设备进行控制;以及信息处理装置,其与上述多个控制器连接于同一网络。上述多个控制器各自具有存储装置,该存储装置存储网络设定以及用于对作为控制对象的驱动设备进行控制的控制程序,上述网络设定包含本控制器的IP(Internet Protocol)地址与代替该IP地址的标识符的对应关系。上述控制程序包含将本控制器的上述网络设定中示出的上述标识符作为输入而对作为控制对象的驱动设备进行控制的控制命令。上述多个控制器各自还具有:生成模块,其用于以与其他控制器的IP地址不同的方式生成本控制器的IP地址,利用该生成的IP地址改写该本控制器的上述网络设定中示出的IP地址;以及通信模块,其用于按照本控制器的上述网络设定中示出的IP地址,与上述信息处理装置进行通信。
根据该公开,控制系统在控制器之间利用相同控制程序的情况下,也能够使信息处理装置和各控制器成为可通信状态。
在本公开的一例中,上述生成模块根据能够唯一识别本控制器的识别信息生成该本控制器的IP地址。
根据该公开,控制器能够可靠地生成不与其他控制器的IP地址重复的IP地址。
在本公开的一例中,上述多个控制器各自构成为能够与外部存储介质连接。上述外部存储介质存储与IP地址有关的设定值。上述生成模块读取上述外部存储介质中存储的上述设定值,按照该设定值生成本控制器的IP地址。
根据该公开,用户仅改写外部存储介质中存储的设定值,就能够改变控制器的IP地址。
在本公开的一例中,上述生成模块向上述其他控制器询问是否在该其他控制器中已经使用了所生成的IP地址,在不存在应答了该询问的其他控制器的情况下,上述生成模块利用该生成的IP地址改写本控制器的上述网络设定中示出的IP地址。
根据该公开,控制器能够可靠地生成不与其他控制器的IP地址重复的IP地址。
在本公开的一例中,在存在应答了上述询问的其他控制器的情况下,上述生成模块再次生成与之前生成的IP地址不同的IP地址。
根据该公开,控制器能够避免本控制器的IP地址与其他控制器的IP地址重复。
在本公开的一例中,上述生成模块在被上述其他控制器询问是否在本控制器中已经设定了该其他控制器的IP地址的情况下,以不与该IP地址重复的方式生成本控制器的IP地址。
根据该公开,与随机生成IP地址相比,控制器能够更可靠地生成唯一的IP地址。
在本公开的一例中,本控制器中存储的控制程序是对其他控制器中存储的控制程序进行复制而得到的。
根据该公开,在其他控制器中的控制程序复制了本控制器中的控制程序的情况下,控制系统也能够使信息处理装置和各控制器成为可通信状态。
在本公开的另一例中,控制器用于对驱动设备进行控制,上述控制器具有存储装置,该存储装置存储网络设定以及用于对上述驱动设备进行控制的控制程序,上述网络设定包含上述控制器的IP地址与代替该IP地址的标识符的对应关系。上述控制程序包含将上述网络设定中示出的上述标识符作为输入而对上述驱动设备进行控制的控制命令。上述控制器还具有:生成模块,其用于以和与上述控制器连接于同一网络的其他控制器的IP地址不同的方式生成上述控制器的IP地址,利用该生成的IP地址改写上述网络设定中示出的IP地址;以及通信模块,其用于按照上述网络设定中示出的IP地址,和与上述控制器连接于同一网络的信息处理装置进行通信。
根据该公开,控制系统在控制器之间利用相同控制程序的情况下,也能够使信息处理装置和各控制器成为可通信状态。
在本公开的另一例中,控制方法是用于对驱动设备进行控制的控制器的控制方法,上述控制方法具有以下步骤:从上述控制器的存储装置取得网络设定以及用于对上述驱动设备进行控制的控制程序,上述网络设定包含上述控制器的IP地址与代替该IP地址的标识符的对应关系。上述控制程序包含将上述网络设定中示出的上述标识符作为输入而对上述驱动设备进行控制的控制命令。上述控制方法还具有以下步骤:以和与上述控制器连接于同一网络的其他控制器的IP地址不同的方式生成上述控制器的IP地址,利用该生成的IP地址改写上述网络设定中示出的IP地址;以及按照上述网络设定中示出的IP地址,和与上述控制器连接于同一网络的信息处理装置进行通信。
根据该公开,控制系统在控制器之间利用相同控制程序的情况下,也能够使信息处理装置和各控制器成为可通信状态。
附图说明
图1是示出基于实施方式的控制系统的概略的图。
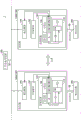
图2是示出基于实施方式的控制系统的系统结构的图。
图3是示出具有IP地址的自动生成功能的功能块的图。
图4是示出各控制器生成自身的IP地址的过程的图。
图5是示出组装了图3所示的功能块的控制程序的例子的图。
图6是示出用于对IP地址的设定模式进行设定的画面的一例的图。
图7是示出依赖于控制器的IP地址的功能块的图。
图8是示出基于通知方式的IP地址的收集功能的流程的顺序图。
图9是示出IP地址的管理表的一例的图。
图10是示出基于轮询方式的IP地址的收集功能的流程的顺序图。
图11是示出图3所示的功能块的变形例的图。
图12是示出图9所示的管理表的变形例的图。
图13是示出基于实施方式的控制器的硬件结构例的框图。
图14是示出基于实施方式的信息处理装置的硬件结构的示意图。
具体实施方式
下面,参照附图对基于本发明的各实施方式进行说明。在以下的说明中,对相同部件和结构要素标注相同标号。它们的名称和功能也相同。因此,不重复进行它们的详细说明。
<A.应用例>
参照图1对本发明的应用例进行说明。图1是示出控制系统1的概略的图。
控制系统1是用于对机器和装置等控制对象进行控制来使生产工序自动化的FA(Factory Automation:工厂自动化)系统。控制系统1包含多个控制器、1个或多个信息处理装置200、多个驱动设备。在图1中,作为多个控制器的例子,示出2个控制器100A、100B。此外,作为多个驱动设备的例子,示出2个驱动设备300。
控制器100A、100B各自包含存储装置105、生成模块152、通信模块154。下面,也将多个控制器(例如控制器100A、100B)统称为控制器100。
控制器100能够与多个网络连接。在图1的例子中,控制器100与网络N1和网络N2连接。
网络N1例如采用EtherNET(注册商标)。但是,网络N1不限于EtherNET,能够采用任意的通信单元。在图1的例子中,信息处理装置200连接于网络N1。信息处理装置200例如包含PC(Personal Computer:个人计算机)、平板终端、智能手机、显示器(例如HMI(HumanMachine Interface:人机接口))等。
网络N2是网络N1下级的网络。网络N2例如采用EtherNet/IP(注册商标)等。在图1的例子中,驱动设备300连接于网络N2。驱动设备300包含用于使生产工序自动化的各种产业用设备。作为一例,驱动设备300包含手臂机器人、用于对手臂机器人进行控制的机器人控制器、用于拍摄在生产工序中搬送的工件的图像传感器、生产工序中利用的其他设备等。
存储装置105存储控制器100的网络设定108、以及用于对驱动设备300进行控制的控制程序110。
网络设定108包含控制器100的IP地址与代替该IP地址的标识符的对应关系。该标识符可以是控制程序110中规定的程序变量,也可以是控制器100中管理的系统变量,还可以是表示各变量的存储场所的物理地址。
控制程序110是设计者根据驱动设备300而安装的用户程序。控制程序110的开发工具例如安装在作为PC的信息处理装置200中。设计者通过在开发工具上任意组合预先规定的多种命令,能够设计符合驱动设备300的结构的控制程序110。在开发工具中编译出的控制程序110被安装在控制器100中。
典型地讲,控制器100A的控制程序110是对控制器100B的控制程序110进行复制而得到的。基于本实施方式的控制系统1提供如下环境:即使在复制了控制程序的情况下,也使控制器100进行动作,而不对控制程序的描述、与IP地址有关的设定进行变更。
更具体而言,控制程序110包含将控制器100的网络设定108中示出的标识符作为输入而对作为控制对象的驱动设备300进行控制的控制命令。该标识符在控制器100A、100B之间是共通的。如上所述,该标识符代替控制器的100A、100B的IP地址。该标识符是不与控制器的100A、100B的IP地址联动的固定值。通过将这种标识符作为输入来解释IP地址,即使在IP地址变化的情况下,用户也不需要改写控制程序110。
生成模块152以与其他控制器的IP地址不同的方式生成本控制器的IP地址。即,生成模块152以IP地址在控制器100A、100B之间不重复的方式生成本控制器的IP地址。在后面叙述以不重复的方式生成IP地址的方法的详细情况。生成模块152利用所生成的IP地址改写本控制器的网络设定108中示出的IP地址。
通信模块154按照本控制器的网络设定108中示出的IP地址,与信息处理装置200进行通信。以不与其他控制器重复的方式决定了网络设定108中示出的IP地址,因此,信息处理装置200能够与控制器100A、100B进行通信。
如上所述,控制程序110中包含的依赖于IP地址的控制命令按照代替IP地址的标识符对作为控制对象的驱动设备300进行控制。因此,在IP地址变化的情况下,也不需要改变控制程序110的描述。其结果,能够在其他控制器中沿用当前使用的控制程序。
此外,控制器100A、100B各自具有以不与其他控制器重复的方式生成IP地址的功能。因此,在与网络N1连接的控制器增加的情况下,信息处理装置200也能够继续与各控制器进行通信。其结果,在将某个控制器中的控制程序利用于连接于同一网络的其他控制器的情况下,也能够成为可通信状态。由此,在复制当前的机器的情况下,不需要手动变更与IP地址有关的设定、控制程序的描述。机器的规模越大,则这种优点越显著。
<B.控制系统1的装置结构>
接着,对基于本实施方式的控制系统1的整体结构进行说明。图2是示出基于本实施方式的控制系统1的系统结构的图。
如图2所示,控制系统1包含多个控制器100、1个或多个信息处理装置200、多个驱动设备300。
控制器100能够与多个网络连接。在图2的例子中,控制器100与上级的网络N1和下级的网络N2连接。
在上级的网络N1连接有信息处理装置200。信息处理装置200是能够与网络N1连接的通信设备。如图2所示,信息处理装置200由1个或多个支持装置200A、1个或多个服务器装置200B、1个或多个显示器200C中的至少一方构成。
支持装置200A向设计者提供用于设计控制程序110的开发环境。支持装置200A例如是笔记本型PC、桌上型PC、平板终端或智能手机等。设计者能够在支持装置200A上设计控制程序110,将该控制程序110经由网络N1下载到控制器100。
服务器装置200B设想为数据库系统、制造执行系统(MES:ManufacturingExecution System)等。制造执行系统取得来自作为控制对象的制造装置、机器的信息,对生产整体进行监视和管理,能够对订单信息、品质信息、出厂信息等进行处理。不限于此,也可以将提供信息类服务(从控制对象取得各种信息并进行宏观或微观分析等的处理)的装置与网络N1连接。此外,服务器装置200B从控制器100收集与控制器100、驱动设备300的动作状态有关的数据,将该收集到的数据写入数据库中。
显示器200C接受来自用户的操作,对控制器100输出与用户操作对应的命令等。显示器200C以图形化的方式显示控制器100中的运算结果等。
在下级的网络N2连接有驱动设备300。驱动设备300是用于直接或间接地对工件W进行规定的作业的设备的集合。在图2中示出作为驱动设备300的一例的手臂机器人325。控制器100A和手臂机器人325的机器与控制器100B和手臂机器人325的机器相同。
控制器100具有多个物理的通信端口。能够在各个通信端口连接不同的网络。在图2的例子中,控制器100具有2个通信端口P1、P2。网络N1通过集线器150分离,与控制器100A、100B各自的通信端口P1连接。在通信端口P2连接有网络N2。网络N2优选采用保证数据的到达时间的进行恒定周期通信的现场网络。作为这种进行恒定周期通信的现场网络,公知有EtherCAT、CompoNet等。控制器100按照控制程序110(参照图1),按照每个恒定周期生成针对手臂机器人325的控制指令,将该控制指令发送到手臂机器人325。
<C.IP地址的自动生成功能>
如上所述,各个控制器100以不与其他控制器重复的方式生成自身的IP地址。这种IP地址的生成功能能够采用各种方法。下面,对IP地址的自动生成功能的具体例进行说明。
(C1.IP地址的自动生成功能的具体例1)
首先,参照图3对IP地址的自动生成功能的具体例1进行说明。在本具体例中,利用功能块提供IP地址的自动生成功能。通过将这种功能块组装在上述控制程序110(参照图1)中,用户不需要设定IP地址。图3是示出具有IP地址的自动生成功能的功能块FB0的图。功能块FB0是上述生成模块152(参照图1)的一例。
下面,在IP地址的自动生成功能由功能块规定的前提下进行说明,但是,IP地址的自动生成功能也可以由其他程序语言规定。作为一例,IP地址的自动生成功能也可以由梯形图(LD:Ladder Diagram)规定,还可以由命令列表(IL:Instruction List)、结构文本(ST:Structured Text)和顺序功能图(SFC:Sequential Function Chart)中的任意一方或它们的组合来规定。此外,也可以由JavaScript(注册商标)、C语言这种通用编程语言规定。
如图3所示,功能块FB0包含受理与IP地址的自动生成功能有关的设定的输入部155A、155B、以及用于输出IP地址的自动生成功能的执行结果的输出部157A~157E。
表示为“Execute(执行)”的输入部155A受理用于指定是否执行IP地址的自动生成功能的设定。作为一例,输入部155A受理“True”或“False”的输入。只要对输入部155A输入“False”,则不执行IP地址的自动生成功能。另一方面,在对输入部155A输入了“True”的情况下,执行IP地址的自动生成功能。
表示为“Method(方法)”的输入部155B受理IP地址的自动生成方法的设定。即,功能块FB0根据输入到输入部155B的值对IP地址的自动生成功能的方法进行切换。作为一例,输入部155B受理“1”~“3”的输入。
在对输入部155B输入了“1”的情况下,功能块FB0根据存储卡等外部存储装置中存储的规定的设定值生成IP地址。典型地讲,预先在外部存储装置中写入设定文件。在该设定文件中规定了与IP地址有关的设定值。该设定值可以是IP地址本身,也可以是控制器固有的识别信息(例如MAC(Media Access Control:介质访问控制)、序列号等)。功能块FB0根据对表示为“Execute”的输入部155A输入了“True”,从该外部存储装置中存储的设定文件中读入设定值。接着,功能块FB0根据该设定值生成控制器100的IP地址。通过提供这种IP地址的生成方法,用户不需要改写现有的控制程序110。
在对输入部155B输入了“2”的情况下,功能块FB0根据能够唯一识别本控制器的识别信息生成该本控制器的IP地址。该识别信息例如是控制器100的MAC(Media AccessControl)地址。根据这种识别信息生成控制器的IP地址,由此能够唯一地决定控制器的IP地址。
在对输入部155B输入了“3”的情况下,功能块FB0根据能够唯一识别本控制器的识别信息生成该本控制器的IP地址。该识别信息例如是控制器100的序列号。根据这种识别信息生成控制器的IP地址,由此能够唯一地决定控制器的IP地址。
在正常地生成了IP地址的情况下,从表示为“Done(完成)”的输出部157A输出表示正常结束的信号。在IP地址的生成中,从表示为“Busy(忙碌)”的输出部157B输出表示生成处理中的信号。在未正常地生成IP地址的情况下,从表示为“Error(错误)”的输出部157C输出表示异常结束的信号。该情况下,进而,从表示为“ErrorID”的输出部157D输出用于识别错误的内容的错误ID。在正常地生成了IP地址的情况下,从表示为“IPAddress(IP地址)”的输出部157C输出所生成的IP地址。
另外,在功能块FB0中,除了输入部155A、155B和输出部157A~157E以外,还可以设置各种输入部和输出部。
(C2.IP地址的自动生成功能的具体例2)
接着,参照图4对IP地址的自动生成功能的具体例2进行说明。在本具体例中,IP地址的自动生成功能不是作为功能块来提供,而是作为控制器100的基本功能来提供。该基本功能是上述生成模块152(参照图1)的一例。
图4是示出各控制器生成自身的IP地址的过程的图。在图4中示出3个控制器100A~100C。控制器100A~100C经由集线器150而与同一网络NW1连接。作为初始状态,设为在控制器100A~100C中未设定IP地址的状态。
首先,控制器100A的生成模块152生成本控制器的IP地址。在未设定控制器100A~100C的IP地址的当前阶段,控制器100A例如根据能够唯一识别本控制器的识别信息生成该本控制器的IP地址。该识别信息例如包含MAC地址和序列号中的至少一方。根据这种识别信息生成控制器的IP地址,由此能够唯一地生成控制器的IP地址。在图4的例子中,作为控制器100A的IP地址,生成“192.168.250.1”。
在步骤S1中,控制器100A以广播的方式将所生成的IP地址发送到其他控制器100B、100C。所生成的IP地址例如以ARP(Address Resolution Protocol:地址解析协议)分组进行发送。ARP是用于从IP地址得到Ethernet的MAC地址的信息的结构。存在针对ARP分组的应答表示已经利用了该ARP分组中包含的IP地址。
利用该结构,控制器100A的生成模块152向其他控制器询问是否在其他控制器中已经使用了所生成的IP地址。即,控制器100A的生成模块152将所生成的IP地址写入ARP分组中,以广播的方式将该ARP分组发送到其他控制器100B、100C。
在步骤S2中,其他控制器100B、100C从控制器100A接收到基于ARP分组的询问。此时,控制器100B、100C存储ARP分组中包含的IP地址。控制器100B、100C判断ARP分组中包含的IP地址是否与自身的IP地址一致。控制器100B、100C在判断为ARP分组中包含的IP地址与自身的IP地址一致的情况下,将自身的MAC地址发送到发送源的控制器100A。不是这样的情况下,控制器100B、100C不对发送源的控制器100A发送任何信息。
在步骤S3中,在不存在应答了基于ARP分组的询问的其他控制器的情况下,控制器100A的生成模块152利用所生成的IP地址改写本控制器的网络设定108(参照图1)。由此,控制器100A能够可靠地生成唯一的IP地址。
另一方面,在存在应答了基于ARP分组的询问的其他控制器的情况下,控制器100A的生成模块152再次生成与之前生成的IP地址不同的IP地址。由此,控制器100A能够避免IP地址与其他控制器重复。控制器100A反复进行IP地址的再次生成和基于ARP分组的询问,直到不再得到针对基于ARP分组的询问的应答为止。
接着,控制器100B的生成模块152生成本控制器的IP地址。在从其他控制器100A接收基于ARP分组的询问的当前阶段,控制器100B的生成模块152以不与该询问中包含的IP地址重复的方式生成本控制器的IP地址。由此,与随机生成IP地址相比,控制器100B能够可靠地生成唯一的IP地址。
作为一例,控制器100B对该IP地址加上规定值(例如1),采用该相加结果作为本控制器的IP地址。在图4的例子中,作为控制器100B的IP地址,生成“192.168.250.2”。在步骤S4中,控制器100B将所生成的IP地址写入ARP分组中,以广播的方式将该ARP分组发送到其他控制器100A、100C。
在步骤S5中,其他控制器100A、100C从控制器100B接收到基于ARP分组的询问。此时,控制器100A、100C存储ARP分组中包含的IP地址。控制器100A、100C判断ARP分组中包含的IP地址是否与自身的IP地址一致。控制器100A、100C在判断为ARP分组中包含的IP地址与自身的IP地址一致的情况下,将自身的MAC地址发送到发送源的控制器100B。不是这样的情况下,控制器100A、100C不对发送源的控制器100B发送任何信息。
在步骤S6中,在不存在应答了基于ARP分组的询问的其他控制器的情况下,控制器100B的生成模块152利用所生成的IP地址改写本控制器的网络设定108(参照图1)。
另一方面,在存在应答了基于ARP分组的询问的其他控制器的情况下,控制器100B的生成模块152再次生成与之前生成的IP地址不同的IP地址。由此,控制器100B能够避免IP地址与其他控制器重复。控制器100B反复进行IP地址的再次生成和基于ARP分组的询问,直到不再得到针对基于ARP分组的询问的应答为止。
接着,控制器100C的生成模块152生成本控制器的IP地址。在从其他控制器100A、100B接收了基于ARP分组的询问的当前阶段,控制器100C的生成模块152以不与该询问中包含的IP地址重复的方式生成本控制器的IP地址。
作为一例,控制器100C对该IP地址加上规定值(例如1),采用该相加结果作为本控制器的IP地址。在图4的例子中,作为控制器100C的IP地址,生成“192.168.250.3”。在步骤S7中,控制器100C的生成模块152将所生成的IP地址写入ARP分组中,以广播的方式将该ARP分组发送到其他控制器100A、100B。
在步骤S8中,其他控制器100A、100B从控制器100C接收到基于ARP分组的询问。控制器100A、100B判断ARP分组中包含的IP地址是否与自身的IP地址一致。控制器100A、100B在判断为ARP分组中包含的IP地址与自身的IP地址一致的情况下,将自身的MAC地址发送到发送源的控制器100C。不是这样的情况下,控制器100A、100B不对发送源的控制器100C发送任何信息。
在步骤S9中,在不存在应答了基于ARP分组的询问的其他控制器的情况下,控制器100C的生成模块152利用所生成的IP地址改写本控制器的网络设定108(参照图1)。
另一方面,在存在应答了基于ARP分组的询问的其他控制器的情况下,控制器100C的生成模块152再次生成与之前生成的IP地址不同的IP地址。由此,控制器100C能够避免IP地址与其他控制器重复。控制器100C反复进行IP地址的再次生成和基于ARP分组的询问,直到不再得到针对基于ARP分组的询问的应答为止。
如上所述,在本具体例中,各个控制器100根据基于ARP分组的询问结果,判断是否在其他控制器中使用了所生成的IP地址。控制器100在从其他控制器至少接收到一次基于ARP分组的询问的阶段,以不与从其他控制器接收到的ARP分组中包含的IP地址重复的方式生成IP地址。由此,防止控制器之间的IP地址的重复。
优选发送ARP分组的间隔按照每个控制器而错开。各控制器例如产生随机数,根据该随机数决定发送ARP分组的定时。这样,发送ARP分组的定时按照每个控制器而错开,由此,防止同时发送ARP分组。
<D.程序例>
参照图5对图3中说明的功能块FB0的使用例进行说明。图5是示出组装了图3所示的功能块FB0的控制程序的例子的图。
在图5的例子中,控制程序110由梯形图程序规定。该控制程序110包含生成控制器100的IP地址的处理和对控制器100设定所生成的IP地址的处理等。另外,图5所示的控制程序110并非示出控制器100中的全部处理,而是示出一部分处理。
在图5的例子中,控制程序110包含输入要素IN0、IN1、功能块FB0、FB1、输出要素OUT0、OUT1。
输入要素IN0、IN1的值根据被分配的变量而变化。更具体而言,对输入要素IN0分配变量“AutoSetting(自动设定)”。变量“AutoSetting”为BOOL型,初始值为“False”(=OFF)。图5中虽没有示出,但是,例如,根据IP地址的自动设定模式被设定为ON,变量“AutoSetting”的值变化为“True”(=ON)。在后面叙述IP地址的设定模式的说明(参照图6)。在IP地址的自动设定模式被设定为OFF的情况下,变量“AutoSetting”的值成为“False”(=OFF)。
对输入要素IN1分配变量“ChangeTrigger(改变触发)”。变量“ChangeTrigger”为BOOL型,初始值为“False”(=OFF)。图5中虽没有示出,但是,例如根据起动了控制器100,变量“ChangeTrigger”的值变化为“True”(=ON)。其他情况下,变量“ChangeTrigger”的值成为“False”(=OFF)。
对输入要素IN2分配变量“Done0”。变量“Done0”为BOOL型,初始值为“False”(=OFF)。此外,变量“Done0”与功能块FB0的输出“Done”相关联。如上所述,在正常地变更了IP地址的生成处理的情况下,从功能块FB0的输出“Done”输出表示正常结束的信号“True”(=ON)。当功能块FB0的输出“Done”成为“True”(=ON)时,输入要素IN2的值成为“True”(=ON)。另一方面,当功能块FB0的输出“Done”成为“False”(=OFF)时,输入要素IN2的值成为“False”(=OFF)。
功能块FB0是用于生成IP地址的程序。根据变量“AutoSetting”成为“True”(=ON)、且变量“ChangeTrigger”成为“True”(=ON),表示有效的信号“True”(=ON)输入到功能块FB0的输入部“Execute”。由此,功能块FB0按照输入到输入部“Method”的变量“Method0”执行IP地址的生成处理。IP地址的生成处理的详细情况如图3中说明的那样,因此,不重复进行其说明。
功能块FB1是用于对控制器100设定IP地址的程序。根据变量“Done”成为“True”(=ON),表示有效的信号“True”(=ON)输入到功能块FB1的输入部“Execute”。由此,功能块FB1按照输入到输入部“IPAddress”的变量“IPAddress0”的值执行IP地址的设定处理。变量“IPAddress0”与功能块FB0的输出“IPAddress”相关联,因此,通过功能块FB1设定由功能块FB0生成的IP地址。更具体而言,功能块FB1利用变量“IPAddress0”的值改写控制器100的网络设定108(参照图1)中规定的IP地址、系统变量中管理的IP地址。
在正常地设定了IP地址的情况下,从功能块FB1的输出部“Done”输出表示正常结束的信号。在IP地址的设定中,从功能块FB1的输出部“Busy”输出表示设定处理中的信号。在未正常设定IP地址的情况下,从功能块FB1的输出部“Error”输出表示异常结束的信号。该情况下,进而,从功能块FB1的输出部“ErrorID”输出用于识别错误的内容的错误ID。
对输出要素OUT1分配变量“Done1”,与功能块FB1的输出部“Done”相关联。其结果,输出要素OUT1的值根据功能块FB1的输出“Done”的值而变化。
<E.IP地址的设定模式>
参照图6对IP地址的设定模式进行说明。图6是示出用于对IP地址的设定模式进行设定的画面的一例的图。
IP地址的设定模式例如能够在上述支持装置200A(参照图2)上显示的设定画面30上进行设定。设定画面30包含受理设定模式的选择的单选按钮R1~R4、OK按钮31、取消按钮32。IP地址的设定模式例如包含第1设定模式~第4设定模式。
在选择了单选按钮R1的情况下,IP地址的设定模式被设定为第1设定模式。在第1设定模式中,用户能够指定要对控制器100设定的IP地址、子网掩码、默认网关的IP地址。
在选择了单选按钮R2的情况下,IP地址的设定模式被设定为第2设定模式。在第2设定模式中,控制器100被设定为按照BOOTP(BOOTstrap Protocol)协议从服务器取得IP地址。在第2设定模式中,控制器100每当起动时,动态地设定IP地址。
在选择了单选按钮R3的情况下,IP地址的设定模式被设定为第3设定模式。在第3设定模式中,控制器100被设定为按照BOOTP协议从服务器取得IP地址。在第3设定模式中,控制器100静态地设定IP地址。
在选择了单选按钮R4的情况下,IP地址的设定模式被设定为第4设定模式。在第4设定模式中,控制器100自动生成IP地址,将该IP地址应用于自身。IP地址的自动生成功能与图3、图4中说明的那样,因此,不重复进行其说明。
当按下OK按钮31时,支持装置200A保存所选择的设定模式。支持装置200A根据受理了设定模式的下载命令,将所选择的设定模式发送到所指定的控制器100。控制器100按照所选择出的设定模式来设定IP地址。
当按下取消按钮32时,支持装置200A不保存所选择的设定模式,关闭设定画面30。
<F.依赖于IP地址的设定的控制命令>
如上所述,控制程序110(参照图1)包含依赖于本控制器的IP地址的控制命令。下面,参照图7对依赖于本控制器的IP地址的控制命令的一例进行说明。图7是示出依赖于本控制器的IP地址的功能块FB2的图。
下面,作为依赖于本控制器的IP地址的控制命令的例子,以功能块FB2为例进行说明,但是,该控制命令不限于功能块FB2。例如,该控制命令能够包含由梯形图规定的命令、由命令列表、结构文本和顺序功能图中的任意一方或它们的组合规定的命令。此外,该控制命令能够包含由JavaScript、C语言这种通用编程语言规定的命令。
功能块FB2是用于将指定的数据发送到指定的装置的程序。功能块FB2包含受理与数据发送功能有关的设定的输入部158A~158D、用于输出数据发送功能的执行结果的输出部159A~159D。
表示为“Execute”的输入部158A受理用于指定是否执行数据发送功能的设定。作为一例,输入部158A受理“True”或“False”的输入。只要对输入部158A输入“False”,则不执行数据发送功能。另一方面,在对输入部158A输入了“True”的情况下,执行数据发送功能。
表示为“Socket”的输入部158B受理与发送目的地、发送源有关的网络信息。作为一例,该网络信息包含发送目的地的信息处理装置200的IP地址、发送源的控制器100的IP地址等。这样,功能块FB2依赖于控制器100的IP地址。控制程序110被设计成:将代替IP地址的上述标识符(参照图1)写入输入到输入部158B的网络信息中,然后,该网络信息被输入到输入部158B。
表示为“SendDat”的输入部158C受理发送对象的数据作为输入。表示为“Size”的输入部158D受理发送对象的数据的大小作为输入。
在正常地发送了发送对象的数据的情况下,从表示为“Done”的输出部159A输出表示正常结束的信号。在发送对象的数据的发送中,从表示为“Busy”的输出部159B输出表示发送处理中的信号。在未正常地生成发送对象的数据的情况下,从表示为“Error”的输出部159C输出表示异常结束的信号。该情况下,进而,从表示为“ErrorID”的输出部159D输出用于识别错误的内容的错误ID。
<G.IP地址的收集功能>
信息处理装置200(参照图1)从下级的各控制器收集由上述自动生成功能生成的IP地址。通过该收集功能,用户能够容易地掌握各控制器中设定的IP地址。
IP地址的收集方法能够采用各种收取方式。作为一例,IP地址的收集方法采用来自控制器100的通知方式和基于信息处理装置200的轮询方式中的任意一方。下面,参照图8~图10依次对该通知方式和该轮询方式进行说明。
(G1.基于通知方式的IP地址的收集功能)
首先,参照图8对基于通知方式的IP地址的收集功能进行说明。图8是示出基于通知方式的IP地址的收集功能的流程的顺序图。
在本方式中的数据收集功能中,各控制器在所设定的定时将自动生成的IP地址自己发送到上级的信息处理装置200。
更具体而言,在步骤S10中,控制器100起动。或者,在步骤S10中,控制器100从上述支持装置200A等下载了各种设定。该各种设定包含在支持装置200A上设计的控制程序110、在上述设定画面30(参照图6)中设定的设定模式等。
在步骤S12中,控制器100执行IP地址的自动生成处理。IP地址的自动生成处理如图3和图4中说明的那样,因此,不重复进行其说明。控制器100将所生成的IP地址设定为本IP地址。
在步骤S20中,控制器100将步骤S12中生成的IP地址发送到信息处理装置200。其他控制器也同样,针对自动生成的IP地址,在所设定的定时将该IP地址发送到信息处理装置200。
在步骤S22中,信息处理装置200根据从控制器100接收到IP地址,对IP地址的管理表进行更新。图9是示出IP地址的管理表的一例的图。在图9中,作为IP地址的管理表的一例,示出管理表35。
管理表35例如由信息处理装置200的后述存储装置210(参照图14)管理。在管理表35中,控制器的识别信息、IP地址、序列号、型号相对应。控制器的识别信息由控制器名、ID(Identification)等能够唯一识别控制器的信息示出。
在管理表35中未规定与IP地址的发送源的控制器有关的信息的情况下,信息处理装置200将该发送源的控制器的识别信息、该发送源的控制器的IP地址、该发送源的控制器的序列号、该发送源的控制器的型号追加到管理表35中。另一方面,在管理表35中已经规定了与IP地址的发送源的控制器有关的信息的情况下,利用接收到的IP地址、序列号、型号对与该发送源的控制器的识别信息对应的IP地址、序列号、型号进行更新。
用户能够根据需要在信息处理装置200的显示器上显示管理表35。由此,用户能够容易地掌握各控制器中设定的IP地址。此外,通过排列显示序列号、型号等,用户容易区分控制器,能够容易地掌握对哪个控制器设定了哪种IP地址。
(G2.基于轮询方式的IP地址的收集功能)
接着,参照图10对基于轮询方式的IP地址的收集功能进行说明。图10是示出基于轮询方式的IP地址的收集功能的流程的顺序图。
在本方式中的数据收集功能中,信息处理装置200从各控制器定期地收集自动生成的IP地址。
更具体而言,在步骤S50中,信息处理装置200向各个控制器100发送IP地址的发送命令。该发送命令定期地从信息处理装置200发送到控制器100。
在步骤S50的时点,未设定控制器100的IP地址。在未设定IP地址的状态的情况下,控制器100不对从信息处理装置200接收到的发送命令进行任何应答。
在步骤S54中,控制器100起动。或者,在步骤S54中,控制器100从上述支持装置200A等下载了各种设定。该各种设定包含在支持装置200A上设计的控制程序110、在上述设定画面30(参照图6)中设定的设定模式等。
在步骤S60中,信息处理装置200向各个控制器100发送IP地址的发送命令。与步骤S50同样,在该时点,未设定信息处理装置200的IP地址,因此,控制器100不对步骤S60中接收到的发送命令进行任何应答。
在步骤S64中,控制器100执行IP地址的自动生成处理。IP地址的自动生成处理如图3和图4中说明的那样,因此,不重复进行其说明。控制器100将所生成的IP地址设定为本IP地址。
在步骤S70中,信息处理装置200向各个控制器100发送IP地址的发送命令。在该时点,设定了信息处理装置200的IP地址,因此,在步骤S72中,控制器100将自身的IP地址发送到信息处理装置200。
在步骤S80中,信息处理装置200根据从控制器100接收到的IP地址,对IP地址的管理表35(参照图9)进行更新。管理表35的更新方法如图9中说明的那样,因此,不重复进行其说明。
<H.IP地址的决定状态>
优选控制系统1构成为受理是临时决定了控制器100的IP地址的状态还是正式决定了控制器100的IP地址的状态。能够设定这种决定状态,由此,用户能够容易地掌握是临时地设定了各控制器的IP地址的状态还是正式地设定了控制器100的IP地址的状态。
作为一例,用户在构筑控制系统1的网络环境时将控制器100的IP地址设为临时决定状态。在总之先使控制系统1成为可通信状态时等,能够采用这种临时决定状态。用户在构筑控制系统1的网络环境后正式地设定控制器100的IP地址,将该IP地址设为正式决定状态。
下面,参照图11对设定IP地址的决定状态的方法进行说明。图11是示出图3所示的功能块FB0的变形例的图。在图11中,作为功能块FB0的变形例,示出功能块FB3。
图11所示的功能块FB3还具有输入部155C,这点与图3所示的功能块FB0不同。其他方面如上所述,因此,不会重复进行这些说明。
表示为“Setting”的输入部155C受理IP地址的决定状态的设定。作为一例,输入部155C受理“0”或“1”的输入。
在对输入部155C输入了“0”的情况下,由功能块FB3生成的IP地址被设定为临时决定状态。在对输入部155C输入了“1”的情况下,由功能块FB3生成的IP地址被设定为正式决定状态。
IP地址的决定状态例如根据IP地址的自动生成方法进行切换。作为一例,在对输入部155B设定了根据控制器100的识别信息(例如MAC地址等)生成IP地址的方法的情况下,对输入部155C输入表示临时决定状态的“0”。此外,在对输入部155B设定了根据存储卡等外部存储装置中存储的设定值生成IP地址的方法的情况下,对输入部155C输入表示正式决定状态的“1”。
图12是示出图9所示的管理表35的变形例的图。在图12中,作为变形例,示出管理表35A。
管理表35A例如由信息处理装置200的后述存储装置210(参照图14)管理。在管理表35A中,控制器的识别信息、IP地址、IP地址的决定状态相对应。控制器的识别信息由控制器名、ID等能够唯一识别控制器的信息示出。
用户能够根据需要在信息处理装置200的显示器上显示管理表35A。由此,用户能够容易地掌握各控制器中设定的IP地址的决定状态。
<I.控制器100的硬件结构>
图13是示出控制器100的硬件结构例的框图。参照图13,控制器100包含处理器102、芯片组104、存储装置105、主存储器106、USB(Universal Serial Bus:通用串行总线)接口112、存储卡接口114、网络接口118、内部总线控制器120、现场网络控制器130。
处理器102由CPU(Central Processing Unit)、MPU(Micro Processing Unit)、GPU(Graphics Processing Unit)等构成。作为处理器102,可以采用具有多个核的结构,也可以配置多个处理器102。这样,控制器100具备1个或多个处理器102和/或具有1个或多个核的处理器102。芯片组104通过对处理器102和周边要素进行控制,实现作为控制器100整体的处理。主存储器106由DRAM(Dynamic Random AccessMemory)、SRAM(Static RandomAccess Memory)等易失性存储装置等构成。存储装置105例如由闪存等非易失性存储装置等构成。
处理器102读出存储装置105中存储的各种程序,在主存储器106中展开并执行,由此实现与控制对象对应的控制。在存储装置105中存储有上述网络设定108、控制器100的控制程序110。控制程序110在用于实现基本处理的系统程序111B的基础上,还包含根据作为控制对象的制造装置、机器生成的用户程序110A。
USB接口112对与经由USB连接的外部装置(例如进行用户程序的开发等的支持装置)之间的数据通信进行中介。
存储卡接口114构成为能够拆装存储卡116,能够对存储卡116写入数据,从存储卡116读出各种数据(用户程序、跟踪数据等)。
网络接口118能够进行经由网络N1的数据通信的中介。
内部总线控制器120对与装配于控制器100的功能单元之间的数据通信进行中介。现场网络控制器130对经由网络N2的与其他单元之间的数据通信进行中介。
在图13中示出实现处理器102执行程序而必要的处理的结构例,但是,也可以使用专用硬件电路(例如ASIC(Application Specific Integrated Circuit)或FPGA(FieldProgrammable Gate Array)等)实现提供的这些处理的一部分或全部。
<J.信息处理装置200的硬件结构>
参照图14对信息处理装置200的硬件结构进行说明。图14是示出信息处理装置200的硬件结构的示意图。
作为一例,信息处理装置200由基于通用的计算机架构构成的计算机构成。信息处理装置200包含控制装置201、主存储器202、通信接口203、操作接口205、显示接口206、光学驱动207、存储装置210。这些组成部分经由内部总线219以能够通信的方式相互连接。
控制装置201例如由至少1个集成电路构成。集成电路例如由至少1个CPU、至少1个ASIC、至少1个FPGA或它们的组合等构成。控制装置201通过在主存储器202中展开并执行程序,实现IP地址的上述收集功能等各种处理。主存储器202由易失性存储器构成,作为控制装置201执行程序所需要的工作存储器发挥功能。
通信接口203在与外部设备之间经由网络交换数据。该外部设备例如包含控制器100、服务器、其他通信设备等。信息处理装置200也可以构成为能够经由通信接口203下载信息处理程序213。信息处理程序213是用于提供上述控制程序110的综合开发环境的程序。
操作接口205与操作部222连接,取入表示来自操作部222的用户操作的信号。典型地讲,操作部222由键盘、鼠标、触摸面板、触摸板等构成,受理来自用户的操作。
显示接口206与显示部220连接,按照来自控制装置201等的指令,对显示部220送出用于显示图像的图像信号。显示部220由显示器、指示器等构成,对用户提示各种信息。
光学驱动207从光盘207A等读出其中存储的各种程序,将其安装在存储装置210中。
在图14中示出经由光学驱动207将必要的程序安装在信息处理装置200中的结构例,但是不限于此,也可以从网络上的服务器装置等下载。或者,信息处理装置200上的程序也可以构成为通过USB(Universal Serial Bus)存储器、SD(Secure Digital)卡、CF(Compact Flash)等存储介质中写入的程序进行改写。
存储装置210例如是硬盘或外置的存储介质。作为一例,存储装置210存储上述管理表35、35A和信息处理程序213。另外,管理表35、35A不需要必须存储在存储装置210中,也可以存储在其他存储装置中。作为一例,管理表35、35A也可以存储在主存储器202、外部存储介质(例如存储卡、服务器等)中。
<K.总结>
如上所述,控制程序110包含依赖于IP地址的控制命令。该控制命令将控制器100的网络设定108中示出的标识符作为输入而对作为控制对象的驱动设备300进行控制。该标识符代替控制器的IP地址,在各控制器中是共通的。通过将这种标识符作为输入,即使在IP地址变化的情况下,用户也不需要改写控制程序110。因此,能够在其他控制器中沿用当前使用的控制程序,机器的扩大变得容易。
此外,控制器100以与其他控制器的IP地址不同的方式生成本控制器的IP地址。由此,用户在扩大机器的情况下,也能够容易地构筑可通信环境。
<L.附记>
如上所述,本实施方式包含以下那样的公开。
[结构1]
一种控制系统,其具有:
多个控制器(100A、100B、100C),它们分别用于对作为控制对象的驱动设备(300)进行控制;以及
信息处理装置(200),其与所述多个控制器(100A、100B、100C)连接于同一网络,
所述多个控制器(100A、100B、100C)各自具有存储装置(105),该存储装置(105)存储网络设定(108)以及用于对作为控制对象的驱动设备(300)进行控制的控制程序(110),所述网络设定(108)包含本控制器的IP(Internet Protocol)地址与代替该IP地址的标识符的对应关系,
所述控制程序(110)包含将本控制器的所述网络设定(108)中示出的所述标识符作为输入而对作为控制对象的驱动设备(300)进行控制的控制命令,
所述多个控制器(100A、100B、100C)各自还具有:
生成模块(152),其用于以与其他控制器的IP地址不同的方式生成本控制器的IP地址,利用该生成的IP地址改写该本控制器的所述网络设定(108)中示出的IP地址;以及
通信模块(154),其用于按照本控制器的所述网络设定(108)中示出的IP地址,与所述信息处理装置(200)进行通信。
[结构2]
根据结构1所述的控制系统,其中,
所述生成模块(152)根据能够唯一识别本控制器的识别信息生成该本控制器的IP地址。
[结构3]
根据结构1或2所述的控制系统,其中,
所述多个控制器(100A、100B、100C)各自构成为能够与外部存储介质连接,
所述外部存储介质存储与IP地址有关的设定值,
所述生成模块(152)读取所述外部存储介质中存储的所述设定值,按照该设定值生成本控制器的IP地址。
[结构4]
根据结构1~3中的任意一项所述的控制系统,其中,
所述生成模块(152)向所述其他控制器询问是否在该其他控制器中已经使用了所生成的IP地址,
在不存在应答了该询问的其他控制器的情况下,所述生成模块(152)利用该生成的IP地址改写本控制器的所述网络设定(108)中示出的IP地址。
[结构5]
根据结构4所述的控制系统,其中,
在存在应答了所述询问的其他控制器的情况下,所述生成模块(152)再次生成与之前生成的IP地址不同的IP地址。
[结构6]
根据结构4或5所述的控制系统,其中,
所述生成模块(152)在被所述其他控制器询问是否在本控制器中已经设定了该其他控制器的IP地址的情况下,以不与该IP地址重复的方式生成本控制器的IP地址。
[结构7]
根据结构1~6中的任意一项所述的控制系统,其中,
本控制器中存储的控制程序(110)是对其他控制器中存储的控制程序(110)进行复制而得到的。
[结构8]
一种控制器(100A),其用于对驱动设备(300)进行控制,其中,
所述控制器(100A)具有存储装置(105),该存储装置(105)存储网络设定(108)以及用于对所述驱动设备(300)进行控制的控制程序(110),所述网络设定(108)包含所述控制器(100A)的IP地址与代替该IP地址的标识符的对应关系,
所述控制程序(110)包含将所述网络设定(108)中示出的所述标识符作为输入而对所述驱动设备(300)进行控制的控制命令,
所述控制器(100A)还具有:
生成模块(152),其用于以和与所述控制器(100A)连接于同一网络的其他控制器(100B、100C)的IP地址不同的方式生成所述控制器(100A)的IP地址,利用该生成的IP地址改写所述网络设定(108)中示出的IP地址;以及
通信模块(154),其用于按照所述网络设定(108)中示出的IP地址,和与所述控制器(100A)连接于同一网络的信息处理装置(200)进行通信。
[结构9]
一种控制方法,是用于对驱动设备(300)进行控制的控制器(100A)的控制方法,其中,
所述控制方法具有以下步骤:从所述控制器(100A)的存储装置取得网络设定(108)以及用于对所述驱动设备(300)进行控制的控制程序(110),所述网络设定(108)包含所述控制器(100A)的IP地址与代替该IP地址的标识符的对应关系,
所述控制程序(110)包含将所述网络设定(108)中示出的所述标识符作为输入而对所述驱动设备(300)进行控制的控制命令,
所述控制方法还具有以下步骤:
以和与所述控制器(100A)连接于同一网络的其他控制(100B、100C)器的IP地址不同的方式生成所述控制器(100A)的IP地址,利用该生成的IP地址改写所述网络设定(108)中示出的IP地址;以及
按照所述网络设定(108)中示出的IP地址,和与所述控制器(100A)连接于同一网络的信息处理装置(200)进行通信。
应该理解到本次公开的实施方式在全部方面是例示而不是限制。本发明的范围不由上述说明示出而由权利要求书示出,意图包含与权利要求书等同的意思和范围内的全部变更。
标号说明
1:控制系统;30:设定画面;31:OK按钮;32:取消按钮;35、35A:管理表;100、100A、100B、100C:控制器;102:处理器;104:芯片组;105、210:存储装置;106、202:主存储器;108:网络设定;110:控制程序;110A:用户程序;111B:系统程序;112:USB接口;114:存储卡接口;116:存储卡;118:网络接口;120:内部总线控制器;130:现场网络控制器;150:集线器;152:生成模块;154:通信模块;155A、155B、155C、158A、158B、158C、158D:输入部;157A、157B、157C、157D、157E、159A、159B、159C、159D:输出部;200:信息处理装置;200A:支持装置;200B:服务器装置;200C:显示器;201:控制装置;203:通信接口;205:操作接口;206:显示接口;207:光学驱动;207A:光盘;213:信息处理程序;219:内部总线;220:显示部;222:操作部;300:驱动设备;325:手臂机器人。
Claims (9)
1.一种控制系统,其具有:
多个控制器,它们各自用于对作为控制对象的驱动设备进行控制;以及
信息处理装置,其与所述多个控制器连接于同一网络,
所述多个控制器各自具有存储装置,该存储装置存储网络设定、以及用于对作为控制对象的驱动设备进行控制的控制程序,所述网络设定包含本控制器的IP地址即网络协议地址与代替该IP地址的标识符的对应关系,
所述控制程序包含将本控制器的所述网络设定中示出的所述标识符作为输入而对作为控制对象的驱动设备进行控制的控制命令,
所述多个控制器各自还具有:
生成模块,其用于以与其他控制器的IP地址不同的方式生成本控制器的IP地址,利用该生成的IP地址改写该本控制器的所述网络设定中示出的IP地址;以及
通信模块,其用于按照本控制器的所述网络设定中示出的IP地址,与所述信息处理装置进行通信,
所述标识符在所述多个控制器之间是相同的。
2.根据权利要求1所述的控制系统,其中,
所述生成模块根据能够唯一识别本控制器的识别信息生成该本控制器的IP地址。
3.根据权利要求1或2所述的控制系统,其中,
所述多个控制器各自构成为能够与外部存储介质连接,
所述外部存储介质存储与IP地址有关的设定值,
所述生成模块读取所述外部存储介质中存储的所述设定值,按照该设定值生成本控制器的IP地址。
4.根据权利要求1或2所述的控制系统,其中,
所述生成模块向所述其他控制器询问是否在该其他控制器中已经使用了所生成的IP地址,
在不存在应答了该询问的其他控制器的情况下,所述生成模块利用该生成的IP地址改写本控制器的所述网络设定中示出的IP地址。
5.根据权利要求4所述的控制系统,其中,
在存在应答了所述询问的其他控制器的情况下,所述生成模块再次生成与之前生成的IP地址不同的IP地址。
6.根据权利要求4所述的控制系统,其中,
所述生成模块在被所述其他控制器询问是否在本控制器中已经设定了该其他控制器的IP地址的情况下,以不与该IP地址重复的方式生成本控制器的IP地址。
7.根据权利要求1或2所述的控制系统,其中,
本控制器中存储的控制程序是对其他控制器中存储的控制程序进行复制而得到的。
8.一种控制器,其用于对驱动设备进行控制,其中,
所述控制器具有存储装置,该存储装置存储网络设定、以及用于对所述驱动设备进行控制的控制程序,所述网络设定包含所述控制器的IP地址与代替该IP地址的标识符的对应关系,
所述控制程序包含将所述网络设定中示出的所述标识符作为输入而对所述驱动设备进行控制的控制命令,
所述控制器还具有:
生成模块,其用于以和与所述控制器连接于同一网络的其他控制器的IP地址不同的方式生成所述控制器的IP地址,利用该生成的IP地址改写所述网络设定中示出的IP地址;以及
通信模块,其用于按照所述网络设定中示出的IP地址,和与所述控制器连接于同一网络的信息处理装置进行通信,
所述标识符在多个控制器之间是相同的。
9.一种控制方法,是用于对驱动设备进行控制的控制器的控制方法,其中,
所述控制方法具有以下步骤:从所述控制器的存储装置取得网络设定、以及用于对所述驱动设备进行控制的控制程序,所述网络设定包含所述控制器的IP地址与代替该IP地址的标识符的对应关系,
所述控制程序包含将所述网络设定中示出的所述标识符作为输入而对所述驱动设备进行控制的控制命令,
所述控制方法还具有以下步骤:
以和与所述控制器连接于同一网络的其他控制器的IP地址不同的方式生成所述控制器的IP地址,利用该生成的IP地址改写所述网络设定中示出的IP地址;以及
按照所述网络设定中示出的IP地址,和与所述控制器连接于同一网络的信息处理装置进行通信,
所述标识符在多个控制器之间是相同的。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018043839A JP6954190B2 (ja) | 2018-03-12 | 2018-03-12 | 制御システム、コントローラ、および制御方法 |
| JP2018-043839 | 2018-03-12 | ||
| PCT/JP2019/002733 WO2019176335A1 (ja) | 2018-03-12 | 2019-01-28 | 制御システム、コントローラ、および制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN111052009A CN111052009A (zh) | 2020-04-21 |
| CN111052009B true CN111052009B (zh) | 2023-04-11 |
Family
ID=67907722
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201980004100.2A Expired - Fee Related CN111052009B (zh) | 2018-03-12 | 2019-01-28 | 控制系统、控制器和控制方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11165745B2 (zh) |
| EP (1) | EP3767410B1 (zh) |
| JP (1) | JP6954190B2 (zh) |
| CN (1) | CN111052009B (zh) |
| WO (1) | WO2019176335A1 (zh) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6950772B2 (ja) * | 2020-03-13 | 2021-10-13 | 株式会社安川電機 | 生産システム、制御方法、及びプログラム |
| TWI861445B (zh) * | 2020-12-08 | 2024-11-11 | 日商發那科股份有限公司 | 機器人控制裝置、機器人控制系統及機器人控制方法 |
| JP7608885B2 (ja) * | 2021-03-11 | 2025-01-07 | オムロン株式会社 | 制御システムおよび制御方法 |
| US11741284B2 (en) * | 2021-09-28 | 2023-08-29 | GBT Technologies, Inc. | Systems and methods of automatic generation of integrated circuit IP blocks |
| SE545244C2 (en) * | 2022-07-18 | 2023-06-07 | Atlas Copco Ind Technique Ab | Method of a network device for connecting a group of industrial tools to a plurality of controllers using shared single virtual ip addresses and identifiers, and network device |
| CN120435850A (zh) * | 2023-04-14 | 2025-08-05 | 三菱电机株式会社 | Plc系统、远程单元、主站、远程单元控制方法、主站控制方法、远程单元控制程序及主站控制程序 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1113640A2 (en) * | 1999-12-30 | 2001-07-04 | AT&T Corp. | Method for performing roaming amongst multiple IP networks |
| US7120139B1 (en) * | 1999-12-30 | 2006-10-10 | At&T Corp. | Broadband cable telephony network architecture IP ITN network architecture reference model |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3345361B2 (ja) * | 1998-10-30 | 2002-11-18 | 株式会社デジタル | 制御装置 |
| JP2002108731A (ja) * | 2000-09-27 | 2002-04-12 | Digital Electronics Corp | コンピュータのネットワーク設定方法、そのプログラムが記録された記録媒体、および、その方法でネットワーク設定可能なコンピュータ |
| JP4238964B2 (ja) | 2001-04-27 | 2009-03-18 | オムロン株式会社 | プログラマブルコントローラ・システム |
| JP2004302735A (ja) * | 2003-03-31 | 2004-10-28 | Mitsubishi Electric Corp | 機器構成管理装置 |
| US7272458B2 (en) | 2004-04-13 | 2007-09-18 | Omron Corporation | Control system setting device |
| US9210034B2 (en) * | 2007-03-01 | 2015-12-08 | Cisco Technology, Inc. | Client addressing and roaming in a wireless network |
| US9319300B2 (en) * | 2008-12-09 | 2016-04-19 | Glue Networks, Inc. | Systems and methods for determining endpoint configurations for endpoints of a virtual private network (VPN) and deploying the configurations to the endpoints |
| CN102859973B (zh) * | 2011-04-19 | 2015-04-15 | 华为技术有限公司 | 一种地址解析的方法,装置和系统 |
| US8738756B2 (en) * | 2011-12-01 | 2014-05-27 | International Business Machines Corporation | Enabling co-existence of hosts or virtual machines with identical addresses |
| JP6362821B2 (ja) | 2012-05-18 | 2018-07-25 | オムロン株式会社 | 制御装置、制御方法および命令セット |
| KR20160070471A (ko) * | 2014-12-10 | 2016-06-20 | 한국전자통신연구원 | 직접통신 단말기에서 ip를 할당하는 방법 및 장치 |
| JP6627571B2 (ja) | 2016-02-26 | 2020-01-08 | オムロン株式会社 | プログラマブルコントローラ、プログラマブルコントローラの制御方法、プログラマブルコントローラの制御プログラム |
| FR3063855B1 (fr) * | 2017-03-08 | 2019-04-12 | Areva Np | Circuit logique programmable de commande d'une installation electrique, en particulier une installation nucleaire, dispositif et procede de commande associes |
-
2018
- 2018-03-12 JP JP2018043839A patent/JP6954190B2/ja active Active
-
2019
- 2019-01-28 CN CN201980004100.2A patent/CN111052009B/zh not_active Expired - Fee Related
- 2019-01-28 EP EP19767451.8A patent/EP3767410B1/en active Active
- 2019-01-28 WO PCT/JP2019/002733 patent/WO2019176335A1/ja not_active Ceased
- 2019-01-28 US US16/643,843 patent/US11165745B2/en not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1113640A2 (en) * | 1999-12-30 | 2001-07-04 | AT&T Corp. | Method for performing roaming amongst multiple IP networks |
| US7120139B1 (en) * | 1999-12-30 | 2006-10-10 | At&T Corp. | Broadband cable telephony network architecture IP ITN network architecture reference model |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6954190B2 (ja) | 2021-10-27 |
| WO2019176335A1 (ja) | 2019-09-19 |
| US11165745B2 (en) | 2021-11-02 |
| EP3767410A1 (en) | 2021-01-20 |
| US20210067483A1 (en) | 2021-03-04 |
| JP2019159631A (ja) | 2019-09-19 |
| CN111052009A (zh) | 2020-04-21 |
| EP3767410A4 (en) | 2021-11-17 |
| EP3767410B1 (en) | 2024-11-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111052009B (zh) | 控制系统、控制器和控制方法 | |
| US7987305B2 (en) | Remote virtual placeholder configuration for distributed input/output modules | |
| JP2005033787A (ja) | 分散制御のために監視制御及びデータ収集(scada)システムを自己設定する方法及び装置 | |
| CN110928243B (zh) | 通过示教器进行EtherCAT总线组态配置的方法 | |
| JP6816554B2 (ja) | 制御システム、制御装置および制御プログラム | |
| JP2002268707A (ja) | コントローラ及びツール並びにそれらにより構成されるシステム | |
| CN104635659A (zh) | 多选项设备的设备类别信息支持 | |
| WO2019167512A1 (ja) | 表示装置、画面生成方法、および画面生成プログラム | |
| JP2018144129A (ja) | ロボットのデータ設定システム、データ設定方法及びプログラム | |
| WO2019176336A1 (ja) | 制御システム、開発支援装置、および開発支援プログラム | |
| CN113037880B (zh) | 网关ip地址的配置方法、装置、网关及可读存储介质 | |
| CN111971630B (zh) | 管理装置及管理系统 | |
| JP2011186607A (ja) | フィールドデバイス、フィールドデバイスの設定方法、フィールドデバイス管理装置及びプログラム | |
| CN111788816A (zh) | 在自动化系统中建立网络通信的方法 | |
| CN114144736B (zh) | 生产辅助装置、生产系统及记录介质 | |
| JP2003131709A (ja) | 制御表示装置、制御プログラムおよびそれを記録した記録媒体 | |
| JP2021039728A (ja) | 工業プラントにおいてフィールドデバイスをシミュレートするためのシステムおよび方法 | |
| JP6856048B2 (ja) | 制御システムおよび制御方法 | |
| US12085904B2 (en) | Engineering device, engineering method, and information storage medium | |
| WO2019225364A1 (ja) | ネットワーク管理装置、ネットワーク管理装置を備えるシステム、ネットワーク管理方法、管理プログラムおよび記録媒体 | |
| CN119183552A (zh) | 用于控制装置的应用模块 | |
| JP2014127055A (ja) | Plcの周辺装置 | |
| WO2019167246A1 (ja) | データ管理システム、制御装置、データ管理装置、データ管理方法およびデータ管理プログラム | |
| WO2024190554A1 (ja) | サポート装置、制御方法、およびサポートプログラム | |
| CN104813615A (zh) | 操作支持现场总线协议的现场设备的方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20230411 |
|
| CF01 | Termination of patent right due to non-payment of annual fee |