CN111190363B - 工具机频率响应参数的调整方法及应用其的调整系统 - Google Patents
工具机频率响应参数的调整方法及应用其的调整系统 Download PDFInfo
- Publication number
- CN111190363B CN111190363B CN201910007118.XA CN201910007118A CN111190363B CN 111190363 B CN111190363 B CN 111190363B CN 201910007118 A CN201910007118 A CN 201910007118A CN 111190363 B CN111190363 B CN 111190363B
- Authority
- CN
- China
- Prior art keywords
- transfer function
- filter
- loop
- optimized
- speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Program-control systems
- G05B19/02—Program-control systems electric
- G05B19/04—Program control other than numerical control, i.e. in sequence controllers or logic controllers
- G05B19/042—Program control other than numerical control, i.e. in sequence controllers or logic controllers using digital processors
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Program-control systems
- G05B19/02—Program-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of program data in numerical form
- G05B19/416—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of program data in numerical form characterised by control of velocity, acceleration or deceleration
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Program-control systems
- G05B19/02—Program-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of program data in numerical form
- G05B19/4155—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of program data in numerical form characterised by program execution, i.e. part program or machine function execution, e.g. selection of a program
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/31—From computer integrated manufacturing till monitoring
- G05B2219/31103—Configure parameters of controlled devices
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Human Computer Interaction (AREA)
- Manufacturing & Machinery (AREA)
- Feedback Control In General (AREA)
Abstract
一种工具机频率响应参数的调整方法及应用其的调整系统。调整方法包括以下步骤。首先,对工具机进行实际扫频,以取得工具机的原系统闭回路数据。然后,取得原系统闭回路数据的原系统开回路转移函数。然后,执行速度优化程序,以决定优化速度参数。然后,取得对应速度优化闭回路转移函数的速度优化开回路转移函数。然后,决定滤波器的滤波器转移函数。然后,执行滤波器优化程序。
Description
技术领域
本公开是有关于一种工具机频率响应参数的调整方法及应用其的调整系统,且特别是有关于一种优化工具机频率响应参数的调整方法及应用其的调整系统。
背景技术
一般来说,数台工具机在出厂前会一一以试错法进行控制器参数的实机调校。然而,这样的调校方法非常耗时。因此,提出一种新的控制器参数的方法以改善前述问题是本领域技术人员努力的方向之一。
发明内容
本公开有关于一种工具机频率响应参数的调整方法及应用其的调整系统,可改善前述已知问题。
本公开实施例提出一种工具机频率响应参数的调整方法。工具机频率响应参数的调整方法包括以下步骤。对工具机进行实际扫频,以取得工具机的原系统闭回路数据;取得原系统闭回路数据的原系统开回路转移函数;执行速度优化程序,以取得速度优化闭回路转移函数及优化速度参数;决定滤波器的滤波器转移函数;执行滤波器优化程序,以取得优化后滤波器转移函数。
本公开另实施例提出一种工具机频率响应参数的调整系统。工具机频率响应参数的调整系统包括扫频器、开回路转移函数取得器、速度优化器及滤波器优化器。扫频器用以对工具机进行实际扫频,以取得工具机的原系统闭回路数据。开回路转移函数取得器用以取得原系统闭回路数据的原系统开回路转移函数。速度优化器用以执行速度优化程序,以取得速度优化闭回路转移函数及优化速度参数,速度优化程序包括:取得对应速度优化闭回路转移函数的速度优化开回路转移函数;执行滤波器优化程序,用以决定滤波器的滤波器转移函数且执行滤波器优化程序,以取得优化后滤波器转移函数。
为了对本公开的上述及其他方面有更佳的了解,下文特举实施例,并配合附图详细说明如下:
附图说明
图1示出依照本公开实施例的工具机频率响应参数的调整系统的功能方块图。
图2A~2C示出依照本公开实施例的工具机频率响应参数的调整方法的流程图。
图2D示出依照本公开实施例的调整方法的全控制系统方块图。
图3示出对图1的工具机进行实际扫频所取得的原系统闭回路数据的示意图。
图4示出依照本公开实施例的中间开回路转移函数所构成的闭回路控制系统方块图。
图5示出依照本公开实施例的中间速度优化开回路转移函数所构成的控制系统方块图。
图6示出依照本公开实施例的第一滤波器的第一滤波器转移函数的波德图。
图7A示出本公开实施例的速度优化开回路转移函数、第一滤波器转移函数与第二滤波器转移函数所构成的控制系统方块图。
图7B示出本公开实施例的第一滤波器转移函数与速度优化开回路转移函数所构成的控制系统方块图。
图8示出依照本公开实施例的速度优化及滤波器优化后的系统波德图。
具体实施方式
请参照图1及图2A~2C,图1示出依照本公开实施例的工具机频率响应参数的调整系统100的功能方块图,而图2A~2C示出依照本公开实施例的工具机频率响应参数的调整方法的流程图。
工具机频率响应参数的调整系统100包括扫频器110、开回路转移函数取得器120、速度优化器130及滤波器优化器140。
扫频器110、开回路转移函数取得器120、速度优化器130和/或滤波器优化器140可以是采用半导体工艺所形成的电路结构(circuit)。扫频器110、开回路转移函数取得器120、速度优化器130与滤波器优化器140中的至少二者可整合成单一组件,或者扫频器110、开回路转移函数取得器120、速度优化器130与滤波器优化器140中的至少一者可整合至处理器(processor)或控制器(controller)中,或使用现场可编程门阵列(FieldProgrammable Gate Array,FPGA)、数字信号处理器(digital signal processor)实现工具机频率响应参数的调整系统100。
以下以图2A~2C说明工具机频率响应参数的调整系统100的工具机频率响应参数的调整方法的流程。请参照图2D,其示出依照本公开实施例的调整方法的全控制系统方块图。通过图2A~2C的流程,可调整图2D的速度参数VG及滤波器转移函数HF(s),以优化原系统开回路转移函数GO1、速度参数VG与滤波器转移函数HF(s)所构成的控制系统(如图2D所示)。以下进一步举例说明。
在步骤S110中,请同时参照图3,其示出对图1的工具机10进行实际扫频所取得的原系统闭回路数据的示意图。扫频器110对工具机10进行实际扫频,以取得工具机10的原系统闭回路数据B1。如图3所示,原系统闭回路数据B1例如是可绘制成波德图(Bode plot)数据,其中波德图包括增益(Gain)波德图B11及相位(Phase)波德图B12。在增益波德图B11中,曲线C1为速度优化及滤波器优化前的频率与增益关系曲线,而曲线C1’为速度优化后的频率与增益关系曲线。在相位波德图B12中,曲线C2为速度优化及滤波器优化前的频率与相位关系曲线,而曲线C2’为速度优化后的频率与相位关系曲线。
在步骤S120中,开回路转移函数取得器120可采用自动控制运算技术,取得对应原系统闭回路数据B1的原系统开回路转移函数GO1,如图2D所示。
步骤S120的取得原系统闭回路数据B1的流程有多种,以下以步骤S121~S123说明其中一种。
在步骤S121中,请参照图4,其示出依照本公开实施例的中间开回路转移函数GO1′所构成的控制系统方块图。开回路转移函数取得器120可使用下式(1)取得对应原系统闭回路数据B1的中间开回路转移函数GO1′。式(1)中的GC1′为原系统闭回路数据B1的闭回路转移函数(即图4的控制系统的闭回路转移函数)。

在步骤S122中,开回路转移函数取得器120判断中间开回路转移函数GO1′的相位波德图的相位是否连续。当中间开回路转移函数GO1′的相位波德图的相位连续时,流程进入步骤S123。当中间开回路转移函数GO1′的相位波德图的相位不连续时,重新运算原系统闭回路数据B1。例如,当相位不连续时,表示相位计算可能有误差,因此可修正相位(加或减360度)而得到正确且连续的相位数据。然后,流程回到步骤S121,直到中间开回路转移函数GO1′的相位波德图的相位连续,流程方进入步骤S123。
在步骤S123中,由于中间开回路转移函数G01′的相位波德图的相位连续,因此开回路转移函数取得器120以中间开回路转移函数GO1′作为原系统开回路转移函数GO1。
在步骤S130中,速度优化器130对原系统开回路转移函数GO1进行速度优化。步骤S130的速度优化程序有多种,以下以步骤S131~S136说明其中一种。
在步骤S131中,速度优化器130设定中间速度参数VG′的值。
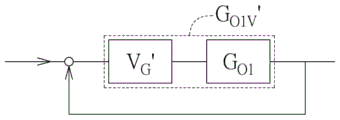
在步骤S132中,请参照图5,其示出依照本公开实施例的中间速度优化开回路转移函数GO1V′所构成的控制系统方块图。速度优化器130可采用下式(2a)~(2c),取得原系统开回路转移函数GO1与中间速度参数VG′所构成的控制系统(如图5所示的控制系统)的开回路转移函数,即中间速度优化开回路转移函数GO1V′。详言之,速度优化器130可采用下式(2a),将原系统开回路转移函数GO1转换为以增益M0及相位θ表示,其中增益M0及相位θ可表示在x轴为实数轴而y轴为虚数轴的复数空间(未示出)中。速度优化器130可采用下式(2b),将原系统开回路转移函数GO1乘以中间速度参数VG′,以取得中间速度优化开回路转移函数GO1V′。速度优化器130可采用下式(2c),其中式(2a)代入式(2b)并且将式(2b)的中间速度优化开回路转移函数GO1V′转换为以增益M0′及相位θ′表示,其中增益M0′及相位θ′可表示在x轴为实数轴而y轴为虚数轴的复数空间中。除非中间速度参数VG′的数值为1,不然中间速度优化开回路转移函数GO1V′的增益M0′与原系统开回路转移函数G01的增益M0相异。由于中间速度参数VG′为整数,因此不改变相位,即相位θ′与θ相等(即,θ=θ′)。
GO1=M0×cos(θ)+i(M0×sin(θ)).....(2a)
GO1V′=GO1×VG′.......................,.....(2b)
GO1V′=M0′×cos(θ′)+i(M0′×sin(θ′))...(2c)
在步骤S133中,速度优化器130可采用下式(3a)~(3b),取得对应中间速度优化开回路转移函数GO1V′(如图5所示)的中间速度优化闭回路转移函数GC1V′。举例来说,速度优化器130使用下式(3a),将中间速度优化开回路转移函数GO1V′转换成中间速度优化闭回路转移函数GC1V′。如式(3b)所式,速度优化器130将中间速度优化闭回路转移函数GC1V′转换成以增益MC′及相位θC′表示,其中增益MC′及相位θC′可表示在x轴为实数轴而y轴为虚数轴的复数空间(未示出)中(即,θ′C≠θ′)。

GC1V′=MC′×cos(θC′)+i(MC′×sin(θC′))......(3b)
在步骤S134中,速度优化器130判断中间速度优化闭回路转移函数GC1V′的增益MC′是否介于容许范围内。当增益MC′介于容许范围内,流程进入步骤S135。当增益MC′介于容许范围外,流程进入步骤S136,重新设定不同数值的中间速度参数VG′,然后重复步骤S132~S134,直到增益MC′介于容许范围内。此外,前述容许范围例如是增益裕度(当相位为-180度时)至少要10dB,即,波德图相位-180度对应的增益值例如是小于-10dB。
在步骤S135中,由于中间速度优化闭回路转移函数GC1V′的增益MC′介于容许范围内,速度优化器130以中间速度参数VG′作为优化速度参数VG,且以中间速度优化闭回路转移函数GC1V′作为速度优化闭回路转移函数GC1V。后续步骤可依据速度优化闭回路转移函数GC1V,进行滤波器优化程序。
如图3所示,相较于速度优化前的频率与增益关系曲线C1,速度优化后频率与增益关系曲线C1’的系统带宽明显提升(由增益提高可看出)。曲线C1’具有共振点,如分别对应频率f1及f2处的共振点P1及P2。不过,通过以下滤波器优化程序,可降低共振点的增益,即改善共振程度。一个共振点可使用一个滤波器降低其增益。在本实施例中,由于有两个共振点,因此可使用两个滤波器,如第一滤波器F1及第二滤波器F2。
在步骤S140中,速度优化器130可采用类似前式(1)所示的闭回路转移函数转换成开回路转移函数的转换式,取得对应速度优化闭回路转移函数GC1V的速度优化开回路转移函数GO1V,并以速度优化开回路转移函数GO1V参与后续的滤波器优化程序。滤波器优化须以开回路转移函数(即速度优化开回路转移函数GO1V)为主,而速度优化开回路转移函数GO1V是从速度优化闭回路转移函数GC1V转换而来。换言之,要将闭回路转换成开回路才能进行滤波器优化。
在步骤S150中,滤波器优化器140决定滤波器的滤波器转移函数的初始参数,如决定第一滤波器F1的第一滤波器转移函数H1F(s)的初始参数及第二滤波器F2的第二滤波器转移函数H2F(s)的初始参数。初始参数例如是滤波器转移函数的中心频率、带宽及阻尼比。
完成步骤S150的决定滤波器转移函数的初始参数的方式有多种,以下以步骤S151~S156说明其中一种。
在步骤S151中,滤波器优化器140设定滤波器调整目标。滤波器调整目标例如是要对频率与增益关系曲线C1’中共振点P1及P2的增益调整目标,如对共振点P1及P2的增益调降率。
在步骤S152中,请参照图6,其示出依照本公开实施例的第一滤波器F1的第一滤波器转移函数H1F(s)的波德图。第二滤波器转移函数H2F(s)的波德图可类似第一滤波器转移函数H1F(s)。在本步骤中,滤波器优化器140设定滤波器的中心频率。例如,设定第一滤波器转移函数H1F(s)的中心频率Fc为频率f1,且设定第二滤波器转移函数H2F(s)的中心频率Fc(未示出)为频率f2。如图6所示,第一滤波器转移函数H1F(s)的下凹处的最低点所对应的频率为中心频率Fc。
在步骤S153中,滤波器优化器140设定各滤波器的带宽Fw及阻尼比Fd。如图6所示,第一滤波器转移函数H1F(s)的带宽Fw可根据欲改善共振点P1的带宽范围决定。例如,当欲改善图3的共振点P1的带宽范围愈宽,则图6的第一滤波器转移函数H1F(s)的带宽Fw可设计得愈宽。第一滤波器转移函数H1F(s)的阻尼比Fd可根据欲调降共振点P1的增益幅度决定。例如,当欲调降图3的共振点P1的增益幅度愈大,则图6的第一滤波器转移函数H1F(s)的下凹深度D1可设计得愈深。第二滤波器转移函数H2F(s)的带宽Fw及阻尼比Fd的设计类似或同于前述第一滤波器转移函数H1F(s)的带宽Fw及阻尼比Fd的设计方式,于此不再赘述。
此外,在本步骤中,第一滤波器F1的第一滤波器转移函数H1F(s)及其中心频率Fc、带宽Fw及阻尼比Fd可以下式(4a)~(4d)表示,而第二滤波器F2的第二滤波器转移函数H2F(s)及其中心频率Fc、带宽Fw及阻尼比Fd的表示方式可类似下式(4a)~(4d),于此不再赘述。中心频率Fc、带宽Fw及阻尼比Fd根据共振点P1设定,分别代入下列公式,以求出第一滤波器转移函数H1F(s)的系数a、b及ωC。
ωC=2π×FC....................(4a)
b=2×ωC×(Fw/FC).........(4b)


在步骤S154中,取得速度优化开回路转移函数GO1V、第一滤波器转移函数H1F(s)与第二滤波器转移函数H2F(s)所构成的控制系统的第一滤波器优化开回路转移函数GO1VF′,如图7A所示。图7A示出本公开实施例的速度优化开回路转移函数GO1V、第一滤波器转移函数H1F(s)与第二滤波器转移函数H2F(s)所构成的控制系统方块图。第一滤波器优化开回路转移函数GO1VF′为图7A的控制系统的开回路转移函数。
在步骤S155中,滤波器优化器140判断第一滤波器优化开回路转移函数GO1VF′是否符合滤波器调整目标。举例来说,滤波器优化器140判断第一滤波器优化开回路转移函数GO1VF′可否让第一共振点P1及第二共振点P2的增益下降至稳定范围,其中的稳定范围视频率的相位而定,例如当相位为-135度时,增益值小于-3dB,而当相位为-180度时,增益值小于-10dB。若是,则以当前第一滤波器转移函数H1F(s)及第二滤波器转移函数H2F(s)所设定的中心频率Fc、带宽Fw及阻尼比Fd作为滤波器转移函数的初始参数。若否,则回到步骤S153,重新设定不同数值的带宽Fw及阻尼比Fd,然后重复步骤S154~S155,直到第一滤波器优化开回路转移函数GO1VF′符合滤波器调整目标。
此外,可针对一个滤波器转移函数执行步骤S151~S155的流程,待这个滤波器转移函数的初始参数决定后,再累加下一个滤波器转移函数,直到所有滤波器转移函数的初始参数决定完成。
在步骤S156中,滤波器优化器140筛选这些滤波器的数量,以符合工具机10的实际状况。例如,工具机10的控制器(未示出)只接受A1个滤波器的加入时,而滤波器优化器140决定的滤波器数量为A2个。当A1大于或等于A2时,表示滤波器优化器140所决定的滤波器可全数参与系统优化。若当A1小于A2时,则滤波器优化器140以共振频率由低至高的顺率选择滤波器。例如,若工具机10的控制器只允许1个滤波器参与优化时,则滤波器优化器140优先选择对应共振点P1(频率较低)的滤波器F1。本公开实施例以全部滤波器F都受选(例如是两个)为例说明,然本公开实施例不受此限。
然后,在步骤S160中,滤波器优化器140执行滤波器优化程序。在滤波器优化程序中,滤波器优化器140对所选的滤波器转移函数及速度优化开回路转移函数GO1V进行整体运算,以优化滤波器的参数(以下称优化后参数为“优化滤波器参数”)。
完成步骤S160的滤波器优化程序的方式有多种,以下以步骤S161~S169说明其中一种。
在步骤S161中,请参照图7B,其示出本公开实施例的第一滤波器转移函数H1F(s)与速度优化开回路转移函数GO1V所构成的控制系统方块图。在本步骤中,滤波器优化器140取得所选的多个滤波器转移函数中的N个与速度优化开回路转移函数GO1V所构成的控制系统(即图7B的系统方块图)的滤波器优化闭回路转移函数GC1VF′,其中N的初始值为1。以N等于1来说,只把一个(N等于1)滤波器转移函数,如第一滤波器转移函数H1F(s)加入到滤波器优化程序中。换言之,滤波器优化器140取得第一滤波器转移函数H1F(s)与速度优化开回路转移函数GO1V所构成的控制系统(即图7B的系统方块图)的滤波器优化闭回路转移函数GC1VF′。
在步骤S162中,滤波器优化器140判断滤波器优化闭回路转移函数GC1VF′是否符合闭回路调整条件。当滤波器优化闭回路转移函数GC1VF′符合闭回路调整条件,则流程进入步骤S163。闭回路调整条件例如是增益裕度(Gain Margin,GM)等于或大于4dB,且相位裕度(Phase Margin,PM)等于或大于+/-45度。当滤波器优化闭回路转移函数GC1VF′不符合闭回路调整条件,则流程进入步骤S164,重新调整第一滤波器转移函数H1F(s)的阻尼比Fd及带宽Fw,然后流程回到步骤S161。
在步骤S163中,滤波器优化器140取得所选的多个滤波器转移函数中的N个与速度优化开回路转移函数GO1V所构成的控制系统(即图7B的系统方块图)的第二滤波器优化开回路转移函数GO1VF″。
在步骤S165中,滤波器优化器140判断第二滤波器优化开回路转移函数GO1VF″是否符合开回路调整条件。开回路调整条件如是增益裕度等于或大于4dB,且相位裕度等于或大于+/-45度。当第二滤波器优化开回路转移函数GO1VF″符合开回路调整条件,则流程进入步骤S166。当第二滤波器优化开回路转移函数GO1VF″不符合开回路调整条件,则流程进入步骤S167,重新调整第一滤波器转移函数H1F(s)的阻尼比Fd及带宽Fw,然后流程回到步骤S163或S161。
在步骤S166中,滤波器优化器140判断N是否等于数量A2,其中数量A2为滤波器(或滤波器转移函数)的数量。若N少于数量A2,表示尚有滤波器转移函数未加入滤波器优化程序,因此流程进入步骤S169;若N等于A2,表示已将全部滤波器转移函数加入滤波器优化程序,因此流程进入步骤S168。
在步骤S169中,滤波器优化器140累加N的值,例如设定N=N+1,并将两个(本例中,累加后N等于2)滤波器转移函数,即第一滤波器转移函数H1F(s)及第二滤波器转移函数H2F(s)加入至滤波器优化程序(即,将第二滤波器转移函数H2F(s)加入到图7B的系统方块图中,如列于图7B的方块H1F(s)的右边),然后流程回到步骤S161。以此原则,直到所有的滤波器转移函数在滤波器优化程序中都满足前述开回路调整条件及闭回路调整条件。
在步骤S168中,当所有的滤波器转移函数在滤波器优化程序中都满足前述开回路调整条件及闭回路调整条件时,则滤波器优化器140以符合闭回路调整条件及开回路调整条件的滤波器转移函数作为优化后滤波器转移函数,其中优化后滤波器转移函数的中心频率、带宽及阻尼比为优化后滤波器参数。至此,完成滤波器优化程序。
请参照图8,其示出依照本公开实施例的速度优化及滤波器优化后的系统波德图。在增益波德图中,曲线C1为速度优化及滤波器优化前的频率与增益关系曲线,而曲线C1”为速度优化及滤波器优化后的频率与增益关系曲线。在相位波德图中,曲线C2为速度优化及滤波器优化前的频率与相位关系曲线,而曲线C2”为速度优化及滤波器优化后的频率与相位关系曲线。比较图3的曲线C1’及图8的曲线C1”可知,速度优化及滤波器优化后,相较于曲线C1’,曲线C1”的共振点P1及P2及其周遭带宽的增益明显下降。
综上,在本公开实施例的工具机频率响应参数的调整方法中,只对工具机进行一次实际机台扫频,接下来程序(如速度优化程序及滤波器优化程序)皆使用原系统闭回路数据B1以计算机数值运算完成,直到完成速度优化及滤波器优化前都不需再从工具机10取得任何数据。如此一来,本公开实施例的工具机频率响应参数的调整方法可快速且正确完成机台性能调校,有利于产品出货及增加产品使用寿命。
在完成速度优化程序及滤波器优化程序后,调整系统100输出最后得到的优化速度参数VG及各滤波器转移函数的滤波器优化参数。然后,再将优化速度参数VG及各滤波器转移函数的优化滤波器参数输入至工具机10的控制器(未示出),以改善或提升工具机10的性能。
综合来说,本公开实施例的工具机频率响应参数的调整方法及调整系统中,对机台只进行一次实际机台扫频,接下来优化程序皆以计算机数值运算完成,具有至少以下优点:(1)计算机运算速度快,能减少产品出厂调机时间;(2)计算机运算速度快,可对所有工具机10进行,可分别运算,而非如已知调机方法常以一台工具机套用全部工具机;(3)通过前述优化流程,也能使机台长时间维持优异性能(如精度高、稳定度高);(4)计算机运算可提供标准化优化流程;(5)改善已知培养调机人员不易的缺点,可大幅降低人事成本。
综上所述,虽然本公开已以实施例公开如上,然其并非用以限定本公开。本公开所属技术领域中具有通常知识者,在不脱离本公开的精神和范围内,当可作各种的更改与润饰。因此,本公开的保护范围当视后附的权利要求所界定者为准。
【符号说明】
10:工具机
100:工具机频率响应参数的调整系统
110:扫频器
120:开回路转移函数取得器
130:速度优化器
140:滤波器优化器
B1:原系统闭回路数据
B11:增益波德图
B12:相位波德图
C1、C1’、C2、C2’、C1”、C2”:曲线
D1:下凹深度
F1:第一滤波器
F2:第二滤波器
Fc:中心频率
Fd:阻尼比
Fw:带宽
GO1:原系统开回路转移函数
GO1′:中间开回路转移函数
GO1V:速度优化开回路转移函数
GC1′:闭回路转移函数
VG:优化速度参数
VG′:中间速度参数
GO1V′:中间速度优化开回路转移函数
GC1V′:中间速度优化闭回路转移函数
GC1V:速度优化闭回路转移函数
GO1VF′:第一滤波器优化开回路转移函数
GC1VF′:滤波器优化闭回路转移函数
GC1VF″:第二滤波器优化开回路转移函数
H1F(s):第一滤波器转移函数
H2F(s):第二滤波器转移函数
P1、P2:共振点
f1、f2:频率
MC′、M0′、M0、MC′:增益
θ、θ′、θC′:相位
S110~S169:步骤
Claims (16)
1.一种工具机频率响应参数的调整方法,包括:
对工具机进行实际扫频,以取得该工具机的原系统闭回路数据;
取得该原系统闭回路数据的原系统开回路转移函数;
执行速度优化程序,以取得速度优化闭回路转移函数及优化速度参数;
取得对应该速度优化闭回路转移函数的速度优化开回路转移函数;
决定滤波器的滤波器转移函数;
执行滤波器优化程序,以取得优化后滤波器转移函数;
其中该速度优化程序包括:
取得该原系统开回路转移函数与中间速度参数所构成的控制系统的中间速度优化开回路转移函数;
取得对应该中间速度优化开回路转移函数的中间速度优化闭回路转移函数;
判断该中间速度优化闭回路转移函数的增益是否介于容许范围内;以及
当该中间速度优化闭回路转移函数的该增益介于该容许范围内,以该中间速度优化闭回路转移函数作为该速度优化闭回路转移函数且以该中间速度参数作为该优化速度参数。
2.如权利要求1所述的工具机频率响应参数的调整方法,其中该滤波器优化程序包括:
取得该滤波器转移函数与该速度优化开回路转移函数所构成的控制系统的滤波器优化闭回路转移函数;
判断该滤波器优化闭回路转移函数是否符合闭回路调整条件;
取得该滤波器转移函数与该速度优化开回路转移函数所构成的控制系统的滤波器优化开回路转移函数;
判断该滤波器优化开回路转移函数是否符合开回路调整条件;以及
当该滤波器优化闭回路转移函数符合该闭回路调整条件且该滤波器优化开回路转移函数符合该开回路调整条件,以符合该闭回路调整条件及该开回路调整条件的该滤波器转移函数作为该优化后滤波器转移函数。
3.如权利要求1所述的工具机频率响应参数的调整方法,其中该原系统闭回路数据为增益波德图及相位波德图。
4.如权利要求1所述的工具机频率响应参数的调整方法,其中取得该原系统开回路转移函数的步骤、执行该速度优化程序的步骤、取得该速度优化开回路转移函数的步骤、决定该滤波器转移函数的步骤及执行该滤波器优化程序的步骤皆以计算机数值运算完成。
5.如权利要求1所述的工具机频率响应参数的调整方法,其中取得该原系统闭回路数据的该原系统开回路转移函数的步骤包括:
取得对应该原系统闭回路数据的中间开回路转移函数;
判断该中间开回路转移函数的相位是否连续;以及
当该中间开回路转移函数的相位连续,以该中间开回路转移函数作为该原系统开回路转移函数。
6.如权利要求1所述的工具机频率响应参数的调整方法,其中执行该速度优化程序的步骤还包括:
设定该中间速度参数的值;以及
当该中间速度优化闭回路转移函数的该增益介于该容许范围外时,重设该中间速度参数的数值,并且流程回到取得该中间速度优化开回路转移函数的步骤。
7.如权利要求2所述的工具机频率响应参数的调整方法,其中执行该滤波器优化程序还包括:
当该滤波器优化闭回路转移函数不符合该闭回路调整条件,重新调整该滤波器转移函数的参数,然后流程回到取得该滤波器优化闭回路转移函数的步骤。
8.如权利要求2所述的工具机频率响应参数的调整方法,其中取得该速度优化开回路转移函数的步骤包括:决定多个该滤波器的各个该滤波器转移函数;
其中,该滤波器优化程序还包括:设定N的初始值为1;
取得该滤波器优化闭回路转移函数的步骤还包括:取得所述滤波器转移函数中的N个与该速度优化开回路转移函数所构成的控制系统的该滤波器优化闭回路转移函数;
取得该滤波器优化开回路转移函数的步骤还包括:取得所述滤波器转移函数中的N个与该速度优化开回路转移函数所构成的控制系统的该滤波器优化开回路转移函数;
在以符合该闭回路调整条件及该开回路调整条件的该滤波器转移函数作为该优化后滤波器转移函数的步骤后,该滤波器优化程序还包括:
累加N的值,且流程回到取得该滤波器优化闭回路转移函数的步骤。
9.一种工具机频率响应参数的调整系统,包括:
扫频器,用以对工具机进行实际扫频,以取得该工具机的原系统闭回路数据;
开回路转移函数取得器,用以取得该原系统闭回路数据的原系统开回路转移函数;
速度优化器,用以执行速度优化程序,以取得速度优化闭回路转移函数及优化速度参数,该速度优化程序包括:取得对应该速度优化闭回路转移函数的速度优化开回路转移函数;
滤波器优化器,用以决定滤波器的滤波器转移函数且执行滤波器优化程序,以取得优化后滤波器转移函数;
其中在该速度优化程序中,该速度优化器用以:
取得该原系统开回路转移函数与中间速度参数所构成的控制系统的中间速度优化开回路转移函数;
取得对应该中间速度优化开回路转移函数的中间速度优化闭回路转移函数;
判断该中间速度优化闭回路转移函数的增益是否介于容许范围内;以及
当该中间速度优化闭回路转移函数的该增益介于该容许范围内,以该中间速度优化闭回路转移函数作为该速度优化闭回路转移函数且以该中间速度参数作为该优化速度参数。
10.如权利要求9所述的调整系统,其中在该滤波器优化程序中,该滤波器优化器还用以:
取得该滤波器转移函数与该速度优化开回路转移函数所构成的控制系统的滤波器优化闭回路转移函数;
判断该滤波器优化闭回路转移函数是否符合闭回路调整条件;
取得该滤波器转移函数与该速度优化开回路转移函数所构成的控制系统的滤波器优化开回路转移函数;
判断该滤波器优化开回路转移函数是否符合开回路调整条件;以及
当该滤波器优化闭回路转移函数符合该闭回路调整条件且该滤波器优化开回路转移函数符合该开回路调整条件,以符合该闭回路调整条件及该开回路调整条件的该滤波器转移函数作为该优化后滤波器转移函数。
11.如权利要求9所述的调整系统,其中该原系统闭回路数据为增益波德图及相位波德图。
12.如权利要求9所述的调整系统,其中取得该原系统开回路转移函数的步骤、执行该速度优化程序的步骤、取得该速度优化开回路转移函数的步骤、决定该滤波器转移函数的步骤及执行该滤波器优化程序的步骤皆以计算机数值运算完成。
13.如权利要求9所述的调整系统,其中取得该原系统闭回路数据的该原系统开回路转移函数的步骤中,该开回路转移函数取得器还用以:
取得对应该原系统闭回路数据的中间开回路转移函数;
判断该中间开回路转移函数的相位是否连续;以及
当该中间开回路转移函数的相位连续,以该中间开回路转移函数作为该原系统开回路转移函数。
14.如权利要求9所述的调整系统,其中执行该速度优化程序中,该速度优化器还用以:
设定该中间速度参数的值;以及
当该中间速度优化闭回路转移函数的该增益介于该容许范围外时,重设该中间速度参数的数值,并且流程回到取得该中间速度优化开回路转移函数的步骤。
15.如权利要求10所述的调整系统,其中在该滤波器优化程序中,该滤波器优化器还用以:
当该滤波器优化闭回路转移函数不符合该闭回路调整条件,重新调整该滤波器转移函数的参数,且重新取得该滤波器转移函数与该速度优化开回路转移函数所构成的控制系统的该滤波器优化开回路转移函数。
16.如权利要求10所述的调整系统,其中取得该速度优化开回路转移函数的步骤中,该滤波器优化器还用以:决定多个该滤波器的各个该滤波器转移函数;
其中,该滤波器优化程序中,该滤波器优化器还用以:设定N的初始值为1;
取得该滤波器优化闭回路转移函数的步骤中,该滤波器优化器还用以:取得所述滤波器转移函数中的N个与该速度优化开回路转移函数所构成的控制系统的该滤波器优化闭回路转移函数;
取得该滤波器优化开回路转移函数的步骤中,该滤波器优化器还用以:取得所述滤波器转移函数中的N个与该速度优化开回路转移函数所构成的控制系统的该滤波器优化开回路转移函数;
在以符合该闭回路调整条件及该开回路调整条件的该滤波器转移函数作为该优化后滤波器转移函数的步骤后,该滤波器优化器还用以:
累加N的值,且回到取得该滤波器转移函数与该速度优化开回路转移函数所构成的控制系统的该滤波器优化闭回路转移函数的步骤。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| TW107140434 | 2018-11-14 | ||
| TW107140434A TWI681274B (zh) | 2018-11-14 | 2018-11-14 | 工具機頻率響應參數的調整方法及應用其之調整系統 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN111190363A CN111190363A (zh) | 2020-05-22 |
| CN111190363B true CN111190363B (zh) | 2022-01-25 |
Family
ID=69942670
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201910007118.XA Active CN111190363B (zh) | 2018-11-14 | 2019-01-04 | 工具机频率响应参数的调整方法及应用其的调整系统 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20200150630A1 (zh) |
| CN (1) | CN111190363B (zh) |
| TW (1) | TWI681274B (zh) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN119883894B (zh) * | 2024-12-23 | 2026-01-20 | 中国航空工业集团公司西安飞行自动控制研究所 | 一种模型验证工具动态库函数功能测试验证方法 |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4663703A (en) * | 1985-10-02 | 1987-05-05 | Westinghouse Electric Corp. | Predictive model reference adaptive controller |
| US4882526A (en) * | 1986-08-12 | 1989-11-21 | Kabushiki Kaisha Toshiba | Adaptive process control system |
| JPH11305803A (ja) * | 1998-04-24 | 1999-11-05 | Hitachi Ltd | 制御装置 |
| US6622099B2 (en) * | 2000-08-14 | 2003-09-16 | Kollmorgen Corporation | Frequency domain auto-tune for an internal motor controller |
| US6522206B1 (en) * | 2001-07-23 | 2003-02-18 | Analog Devices, Inc. | Adaptive feedback-loop controllers and methods for rapid switching of oscillator frequencies |
| JP2005513601A (ja) * | 2001-12-18 | 2005-05-12 | エムティエス・システムズ・コーポレーション | 制御システムのための制御パラメータを確定する方法 |
| JP2005275588A (ja) * | 2004-03-23 | 2005-10-06 | Yaskawa Electric Corp | 電動機制御装置制御パラメータ感度解析装置 |
| JP5150621B2 (ja) * | 2006-05-19 | 2013-02-20 | シーメンス インダストリー インコーポレイテッド | 閉ループシステムのフィルタとループ比例ゲインを選択するための方法およびシステム |
| JP4973665B2 (ja) * | 2006-11-28 | 2012-07-11 | 株式会社安川電機 | 電動機制御装置と出力フィルタ調整方法および出力フィルタ調整装置 |
| US8072204B1 (en) * | 2007-05-09 | 2011-12-06 | Zilker Labs, Inc. | Control system optimization via digital diode emulation |
| JP4782766B2 (ja) * | 2007-12-27 | 2011-09-28 | オークマ株式会社 | 機械診断方法及びその装置 |
| CN101615023A (zh) * | 2008-06-27 | 2009-12-30 | 深圳市大族激光科技股份有限公司 | 一种测定机床伺服系统的控制性能的方法、装置及系统 |
| US8214063B2 (en) * | 2009-09-29 | 2012-07-03 | Kollmorgen Corporation | Auto-tune of a control system based on frequency response |
| JP5566469B2 (ja) * | 2010-10-27 | 2014-08-06 | 株式会社牧野フライス製作所 | 数値制御方法 |
| CN104980043B (zh) * | 2014-04-03 | 2017-11-24 | 台达电子企业管理(上海)有限公司 | 功率变换器与该功率变换器的频率特性测试及调节方法 |
| CN104281076B (zh) * | 2014-07-03 | 2017-01-25 | 浙江工业大学 | 蛋白质浓度的控制方法 |
| JP2016194916A (ja) * | 2015-03-31 | 2016-11-17 | 独立行政法人国立高等専門学校機構 | 制御系の時間応答シミュレーション方法及び装置 |
| CN106489105B (zh) * | 2015-06-18 | 2018-06-22 | 三菱电机株式会社 | 控制参数调整装置 |
| CN105182932B (zh) * | 2015-08-24 | 2017-09-22 | 中国科学院自动化研究所 | 基于模范系统的优化控制系统方法 |
| US10033319B2 (en) * | 2015-09-01 | 2018-07-24 | Rockwell Automation Technologies, Inc. | Method for tuning a motor drive using frequency response |
| JP6515844B2 (ja) * | 2016-03-14 | 2019-05-22 | オムロン株式会社 | シミュレーション装置、シミュレーション方法、制御プログラム、および記録媒体 |
| JP6751615B2 (ja) * | 2016-07-20 | 2020-09-09 | 日本電産サンキョー株式会社 | モータシステム |
| JP6412071B2 (ja) * | 2016-08-22 | 2018-10-24 | ファナック株式会社 | モータ制御装置、モータ制御方法及びモータ制御用プログラム |
| US10184917B2 (en) * | 2016-09-08 | 2019-01-22 | Linestream Technologies | Method for automatically identifying resonance |
| JP6426770B2 (ja) * | 2017-02-06 | 2018-11-21 | ファナック株式会社 | サーボ制御装置 |
| JP6490131B2 (ja) * | 2017-03-31 | 2019-03-27 | ファナック株式会社 | 機械学習装置、サーボ制御装置、サーボ制御システム、及び機械学習方法 |
| JP6577508B2 (ja) * | 2017-04-07 | 2019-09-18 | ファナック株式会社 | 制御装置 |
-
2018
- 2018-11-14 TW TW107140434A patent/TWI681274B/zh active
- 2018-12-26 US US16/232,424 patent/US20200150630A1/en not_active Abandoned
-
2019
- 2019-01-04 CN CN201910007118.XA patent/CN111190363B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN111190363A (zh) | 2020-05-22 |
| TW202018444A (zh) | 2020-05-16 |
| TWI681274B (zh) | 2020-01-01 |
| US20200150630A1 (en) | 2020-05-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111082729B (zh) | 机器学习装置、控制装置以及机器学习方法 | |
| Veinović et al. | Optimized four-parameter PID controller for AVR systems with respect to robustness | |
| CN103293956A (zh) | 一种被控对象参数不确定系统的分数阶pid控制器整定方法 | |
| CN104635496B (zh) | 一种带串联校正的pi控制器的参数整定方法 | |
| CN108702140A (zh) | 多相滤波器和滤波器电路 | |
| CN111190363B (zh) | 工具机频率响应参数的调整方法及应用其的调整系统 | |
| CN113162567B (zh) | 一种惯性组合滤波器的设计方法、装置及终端设备 | |
| WO2026026003A1 (zh) | 基于卡尔曼滤波的改进pid控制方法 | |
| EP1938156A1 (en) | On demand auto tuner for plant control system | |
| CN115291569A (zh) | 伺服系统及其参数在线调节方法 | |
| CN107528513A (zh) | 速度环控制参数的整定方法及电机控制单元 | |
| CN108594641B (zh) | 基于中心频率不对称的陷波滤波器抑制伺服谐振的方法 | |
| CN102906648A (zh) | 阶跃跟随时的过冲抑制用前馈项的自动调谐方法及装置 | |
| Ahmadi et al. | A unified IMC based PI/PID controller tuning approach for time delay processes | |
| CN112332809B (zh) | 一种幅度非衰减均衡相位的分数阶椭圆滤波器设计方法 | |
| CN118151579A (zh) | 一种反步跟踪控制方法 | |
| Zheng et al. | Stability region Design of Fractional Complex Order $ PI^{\lambda+\mu\mathrm {i}} $ controller using D segmentation | |
| Yu et al. | Improved variable step-size least mean square algorithm based on sigmoid function | |
| Hryniuk et al. | Approximation PID-controllers through deadbeat controller and its tuning | |
| CN111123703B (zh) | 一种变带宽自抗扰控制方法 | |
| Kaya | Optimal and Analytical Tuning of I-PD Controllers for Controlling Stable Processes with Inverse Response | |
| Zítek et al. | Ultimate-frequency based dominant pole placement | |
| Carp et al. | Process control engineering considerations on the application of Virtual Reference Feedback Tuning method | |
| CN115085623B (zh) | 最大转矩电流比搜索算法、装置及计算机可读存储介质 | |
| JPS62525B2 (zh) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |