CN111252017A - 一种低速无人驾驶系统及方法 - Google Patents
一种低速无人驾驶系统及方法 Download PDFInfo
- Publication number
- CN111252017A CN111252017A CN201811458284.3A CN201811458284A CN111252017A CN 111252017 A CN111252017 A CN 111252017A CN 201811458284 A CN201811458284 A CN 201811458284A CN 111252017 A CN111252017 A CN 111252017A
- Authority
- CN
- China
- Prior art keywords
- controller
- parking
- braking
- bus
- backup
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images
Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R16/00—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for
- B60R16/02—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for electric constitutive elements
- B60R16/023—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for electric constitutive elements for transmission of signals between vehicle parts or subsystems
- B60R16/0231—Circuits relating to the driving or the functioning of the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Automation & Control Theory (AREA)
- Valves And Accessory Devices For Braking Systems (AREA)
Abstract
本发明提供了一种低速无人驾驶系统及方法,该系统在无人驾驶系统基础上,增加备份制动控制器和备份驻车控制器。智能控制器可以从制动控制器和备份制动控制器中确定用于执行制动操作的第一控制器,以在挡位控制器、动力控制器、转向控制器、第一CAN总线、第二CAN总线和网关中任意一个或多个处于失效状态的情况下,由第一控制器进行制动。智能控制器还可以从驻车控制器和备份驻车控制器中确定用于执行驻车操作的第二控制器,以在车辆制动至静止状态的情况下,由第二控制器进行驻车。基于本系统,可以在任意功能模块失效时车辆及时制动并驻车,保证车辆进入安全状态,以相对较低的成本满足了低速场景下的功能安全要求,从而避免对交通参与者造成伤害。
Description
技术领域
本发明涉及智能驾驶和功能安全技术领域,更具体地说,涉及一种低速无人驾驶系统及方法。
背景技术
现阶段,无人驾驶车辆集成有视听觉计算中的关键技术、车辆状态感知以及车辆控制等技术,这就使得无人驾驶车辆所做出的智能行为同时受自然环境感知、智能行为决策、车辆状态感知和车辆控制等功能模块输出结果的影响。
而一旦任何功能模块失效,车辆就会失去控制,从而对交通参与者造成伤害。
发明内容
有鉴于此,为解决上述问题,本发明提供一种低速无人驾驶系统及方法,技术方案如下:
一种低速无人驾驶系统,包括无人驾驶系统,所述无人驾驶系统包括设置于第一CAN总线上的挡位控制器和动力控制器、设置于第二CAN总线上的智能控制器、转向控制器、驻车控制器和制动控制器、且所述第一CAN总线与所述第二CAN总线通过网关建立通信连接,所述低速无人驾驶系统还包括:
设置于所述第一CAN总线或者所述第二CAN总线上的备份制动控制器以及设置于所述第一CAN总线或者所述第二CAN总线上的备份驻车控制器;
所述智能控制器,用于基于所述制动控制器的运行状态从所述制动控制器和所述备份制动控制器中确定用于执行制动操作的第一控制器;在所述挡位控制器、所述动力控制器、所述转向控制器、所述第一CAN总线、所述第二CAN总线和所述网关中任意一个或多个处于失效状态的情况下,向所述第一控制器发送制动请求;
所述第一控制器,用于基于所述制动请求执行制动操作;
所述智能控制器,还用于基于所述驻车控制器的运行状态从所述驻车控制器和所述备份驻车控制器中确定用于执行驻车操作的第二控制器;在车辆制动至静止状态的情况下,向所述第二控制器发送驻车请求;
所述第二控制器,用于基于所述驻车请求执行驻车操作。
优选的,所述备份制动控制器设置于所述第一CAN总线、所述备份驻车控制器设置于所述第二CAN总线;或者
所述备份制动控制器设置于所述第二CAN总线、所述备份驻车控制器设置于所述第一CAN总线。
优选的,所述智能控制器,还用于:
在检测到所述智能控制器处于失效状态的情况下,进入静默状态;
所述第一控制器,还用于在确定所述智能控制器进入静默状态的情况下,执行制动操作。
优选的,所述智能控制器,还用于:
在确定所述第二控制器驻车操作执行结束的情况下,向所述第一控制器发送力矩释放请求,所述力矩释放请求用于请求释放制动力矩;
所述第一控制器,还用于基于所述力矩释放请求执行制动力矩释放操作。
一种低速无人驾驶方法,应用于前文任意一项所述的低速无人驾驶系统中的智能控制器,所述低速无人驾驶方法包括:
基于所述制动控制器的运行状态从所述制动控制器和所述备份制动控制器中确定用于执行制动操作的第一控制器;
在所述挡位控制器、所述动力控制器、所述转向控制器、所述第一CAN 总线、所述第二CAN总线和所述网关中任意一个或多个处于失效状态的情况下,向所述第一控制器发送制动请求,以使所述第一控制器基于所述制动请求执行制动操作;
基于所述驻车控制器的运行状态从所述驻车控制器和所述备份驻车控制器中确定用于执行驻车操作的第二控制器;
在车辆制动至静止状态的情况下,向所述第二控制器发送驻车请求,以使所述第二控制器基于所述驻车请求执行驻车操作。
优选的,所述方法还包括:
在检测到所述智能控制器处于失效状态的情况下,进入静默状态,以使所述第一控制器在确定所述智能控制器进入静默状态的情况下,执行制动操作。
优选的,所述方法还包括:
在确定所述第二控制器驻车操作执行结束的情况下,向所述第一控制器发送力矩释放请求,以使所述第一控制器基于所述力矩释放请求执行制动力矩释放操作,所述力矩释放请求用于请求释放制动力矩。
相较于现有技术,本发明实现的有益效果为:
以上本发明提供的了一种低速无人驾驶系统及方法,该系统在现有的无人驾驶系统的基础上,增加备份制动控制器和备份驻车控制器。智能控制器可以从制动控制器和备份制动控制器中确定用于执行制动操作的第一控制器,这就可以在挡位控制器、动力控制器、转向控制器、第一CAN总线、第二CAN总线和网关中任意一个或多个处于失效状态的情况下,由第一控制器进行制动。此外,智能控制器还可以从驻车控制器和备份驻车控制器中确定用于执行驻车操作的第二控制器,这就可以在车辆制动至静止状态的情况下,由第二控制器进行驻车。基于本发明公开的系统,可以实现任意功能模块失效时车辆及时制动并驻车,保证车辆进入安全状态,以相对较低的成本满足了低速场景下的功能安全要求,从而避免对交通参与者造成伤害。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
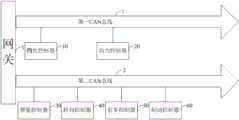
图1为无人驾驶系统的结构示意图;
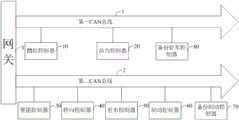
图2为本发明实施例提供的低速无人驾驶系统的结构示意图;
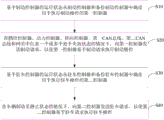
图3为本发明实施例提供的低速无人驾驶方法的方法流程图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
智能控制器:包含自然环境感知模块和智能行为的决策模块,环境感知模块负责自然环境的数据采集,智能行为决策模块负责将自然环境数据和车辆信息有效融合,并根据融合的数据作出实时路径规划和车辆行为决策。
动力控制器:负责提供驱动力矩信息供智能控制器决策,并根据智能控制器的决策正确的提供或者切断动力。
转向控制器:提供车辆实际转角供智能控制器决策,并根据智能控制器的决策正确的提供或者切断车辆的转向能力。
制动控制器:负责提供车速和制动力矩供智能控制器决策,并根据智能控制器的指令正确的提供或者切断制动扭矩。
挡位控制器:负责传递智能控制器的挡位意图给动力控制器或者将驻车或者将智能控制器的驻车意图传递给驻车控制器。
驻车控制器:负责提供驻车力矩防止车辆溜车;另外驻车系统不应该在车速大于5kph的时候提供驻车力矩,防止造成车辆甩尾。
图1示出现有的无人驾驶系统,该无人驾驶系统包括设置于第一CAN总线 1上的挡位控制器10和动力控制器20、设置于第二CAN总线2上的智能控制器 30、转向控制器40、驻车控制器50和制动控制器60、且第一CAN总线1与第二 CAN总线2通过网关3建立通信连接。
在图1所示无人驾驶系统的基础上,本发明实施例提供一种低速无人驾驶系统,该低速无人驾驶系统还包括:
设置于第一CAN总线1或者第二CAN总线2上的备份制动控制器70以及设置于第一CAN总线1或者第二CAN总线2上的备份驻车控制器80。
本发明实施例中,对于备份制动控制器70和备份驻车控制器80所在的 CAN总线并不限定。当然,为保证网络负载率,备份制动控制器70和备份驻车控制器80可以各自设置于一个CAN总线上,具体的,备份制动控制器70设置于第一CAN总线1、备份驻车控制器80设置于第二CAN总线2,或者备份制动控制器70设置于第二CAN总线2、备份驻车控制器80设置于第一CAN总线1。
图2示出的低速无人驾驶系统即为备份制动控制器70设置于第二CAN总线2、备份驻车控制器80设置于第一CAN总线1时的示例。
智能控制器30,用于基于制动控制器60的运行状态从制动控制器60和备份制动控制器70中确定用于执行制动操作的第一控制器;在挡位控制器10、动力控制器20、转向控制器40、第一CAN总线1、第二CAN总线2和网关 3中任意一个或多个处于失效状态的情况下,向第一控制器发送制动请求。
本发明实施例中,初始状态默认激活制动控制器60和驻车控制器50。制动控制器60可以监测自身的运行状态,一旦监测到自身处于失效状态,则向智能服务器30和备份制动控制器70发送用于表征制动控制器60处于失效状态的信号。此时,智能控制器30即可确定备份制动控制器70为用于执行制动操作的第一控制器,同时备份制动控制器70被激活。反之,智能控制器30 则确定制动控制器60为用于执行制动操作的第一控制器。
需要说明的是,为保证行车安全,一旦制动控制器60处于失效状态,备份制动控制器70所执行的操作仅制动操作。
此外,智能控制器30可以通过向挡位控制器10发送挡位指令并监测挡位跟随状态,如果挡位跟随状态与挡位指令不对应,则确定挡位控制器10处于失效状态。
动力控制器20可以按照预设诊断规则进行自诊断以获得自身的运行状态 (包括失效状态和正常状态),并发送至智能控制器30。
智能控制器30可以通过向转向控制器40发送转向指令并监测转向系统的跟随状态,如果转向系统的跟随状态与转向指令不对应,则确定转向控制器40处于失效状态。
智能控制器30可以监测第一CAN总线1,和第二CAN总线2的通讯信号,如果第一CAN总线1出现通讯信号丢失的情况,则确定第一CAN总线 1处于失效状态。同理,如果第二CAN总线2出现通讯信号丢失的情况,则确定第二CAN总线2处于失效状态。
智能控制器30还可以采用安全通讯措施E2E(end to end)检测网关3的运行状态(包括失效状态和正常状态)。
第一控制器,用于基于制动请求执行制动操作。
智能控制器30,还用于基于驻车控制器50的运行状态从驻车控制器50 和备份驻车控制器80中确定用于执行驻车操作的第二控制器;在车辆制动至静止状态的情况下,向第二控制器发送驻车请求。
本发明实施例中,初始状态默认激活制动控制器60和驻车控制器50。驻车控制器50可以监测自身的运行状态,一旦监测到自身处于失效状态,则向智能服务器30和备份驻车控制器80发送用于表征驻车控制器50处于失效状态的信号。此时,智能控制器30即可确定备份驻车控制器80为用于执行驻车操作的第二控制器,同时备份驻车控制器80被激活。反之,智能控制器30 则确定驻车控制器50为用于执行驻车操作的第二控制器。
需要说明的是,为保证行车安全,一旦驻车控制器50处于失效状态,备份驻车控制器80所执行的操作仅驻车操作。
第二控制器,用于基于驻车请求执行驻车操作。
在其他一些实施例中,为避免智能控制器失效造成车辆失控的情况发生,智能控制器30,还用于:
在检测到智能控制器30处于失效状态的情况下,进入静默状态。
本发明实施例中,智能控制器30可以按照预设诊断规则进行自诊断以获得自身的运行状态(包括失效状态和正常状态)。
第一控制器,还用于在确定智能控制器30进入静默状态的情况下,执行制动操作。
本发明实施例中,第一控制器如果在连续几个时钟周期内未接收到智能控制器所反馈的信号,则确定智能控制器30进入静默状态,此时第一控制器主动进行制动。
在其他一些实施例中,为保护制动执行机构,智能控制器30,还用于:
在确定第二控制器驻车操作执行结束的情况下,向第一控制器发送力矩释放请求,力矩释放请求用于请求释放制动力矩;
第一控制器,还用于基于力矩释放请求执行制动力矩释放操作。
本发明实施例中,第一控制器可以在驻车结束时,控制制动执行机构,一般是液压系统释放制动力矩。
本发明实施例提供的低速无人驾驶系统,可以实现任意功能模块失效时车辆及时制动并驻车,保证车辆进入安全状态,以相对较低的成本满足了低速场景下的功能安全要求,从而避免对交通参与者造成伤害。
基于上述实施例提供的低速无人驾驶系统,本发明实施例则提供一种低速无人驾驶方法,该方法应用于低速无人驾驶系统中的智能控制器,方法流程图如图3所示,包括如下步骤:
S10,基于制动控制器的运行状态从制动控制器和备份制动控制器中确定用于执行制动操作的第一控制器。
S20,在挡位控制器、动力控制器、转向控制器、第一CAN总线、第二 CAN总线和网关中任意一个或多个处于失效状态的情况下,向第一控制器发送制动请求,以使第一控制器基于制动请求执行制动操作。
S30,基于驻车控制器的运行状态从驻车控制器和备份驻车控制器中确定用于执行驻车操作的第二控制器。
S40,在车辆制动至静止状态的情况下,向第二控制器发送驻车请求,以使第二控制器基于驻车请求执行驻车操作。
在其他一些实施例中,为避免智能控制器失效造成车辆失控的情况发生,在图3所示的低速无人驾驶方法的基础上,还包括如下步骤:
在检测到智能控制器处于失效状态的情况下,进入静默状态,以使第一控制器在确定智能控制器进入静默状态的情况下,执行制动操作。
在其他一些实施例中,为保护制动执行机构,在图3所示的低速无人驾驶方法的基础上,还包括如下步骤:
在确定第二控制器驻车操作执行结束的情况下,向第一控制器发送力矩释放请求,以使第一控制器基于力矩释放请求执行制动力矩释放操作,力矩释放请求用于请求释放制动力矩。
本发明实施例提供的低速无人驾驶方法,可以实现任意功能模块失效时车辆及时制动并驻车,保证车辆进入安全状态,以相对较低的成本满足了低速场景下的功能安全要求,从而避免对交通参与者造成伤害。
以上对本发明所提供的一种低速无人驾驶系统及方法进行了详细介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
需要说明的是,本说明书中的各个实施例均采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似的部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
还需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备所固有的要素,或者是还包括为这些过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
Claims (7)
1.一种低速无人驾驶系统,包括无人驾驶系统,所述无人驾驶系统包括设置于第一CAN总线上的挡位控制器和动力控制器、设置于第二CAN总线上的智能控制器、转向控制器、驻车控制器和制动控制器、且所述第一CAN总线与所述第二CAN总线通过网关建立通信连接,其特征在于,所述低速无人驾驶系统还包括:
设置于所述第一CAN总线或者所述第二CAN总线上的备份制动控制器以及设置于所述第一CAN总线或者所述第二CAN总线上的备份驻车控制器;
所述智能控制器,用于基于所述制动控制器的运行状态从所述制动控制器和所述备份制动控制器中确定用于执行制动操作的第一控制器;在所述挡位控制器、所述动力控制器、所述转向控制器、所述第一CAN总线、所述第二CAN总线和所述网关中任意一个或多个处于失效状态的情况下,向所述第一控制器发送制动请求;
所述第一控制器,用于基于所述制动请求执行制动操作;
所述智能控制器,还用于基于所述驻车控制器的运行状态从所述驻车控制器和所述备份驻车控制器中确定用于执行驻车操作的第二控制器;在车辆制动至静止状态的情况下,向所述第二控制器发送驻车请求;
所述第二控制器,用于基于所述驻车请求执行驻车操作。
2.根据权利要求1所述的系统,其特征在于,所述备份制动控制器设置于所述第一CAN总线、所述备份驻车控制器设置于所述第二CAN总线;或者
所述备份制动控制器设置于所述第二CAN总线、所述备份驻车控制器设置于所述第一CAN总线。
3.根据权利要求1所述的系统,其特征在于,所述智能控制器,还用于:
在检测到所述智能控制器处于失效状态的情况下,进入静默状态;
所述第一控制器,还用于在确定所述智能控制器进入静默状态的情况下,执行制动操作。
4.根据权利要求1所述的系统,其特征在于,所述智能控制器,还用于:
在确定所述第二控制器驻车操作执行结束的情况下,向所述第一控制器发送力矩释放请求,所述力矩释放请求用于请求释放制动力矩;
所述第一控制器,还用于基于所述力矩释放请求执行制动力矩释放操作。
5.一种低速无人驾驶方法,其特征在于,应用于权利要求1~4任意一项所述的低速无人驾驶系统中的智能控制器,所述低速无人驾驶方法包括:
基于所述制动控制器的运行状态从所述制动控制器和所述备份制动控制器中确定用于执行制动操作的第一控制器;
在所述挡位控制器、所述动力控制器、所述转向控制器、所述第一CAN总线、所述第二CAN总线和所述网关中任意一个或多个处于失效状态的情况下,向所述第一控制器发送制动请求,以使所述第一控制器基于所述制动请求执行制动操作;
基于所述驻车控制器的运行状态从所述驻车控制器和所述备份驻车控制器中确定用于执行驻车操作的第二控制器;
在车辆制动至静止状态的情况下,向所述第二控制器发送驻车请求,以使所述第二控制器基于所述驻车请求执行驻车操作。
6.根据权利要求5所述的方法,其特征在于,所述方法还包括:
在检测到所述智能控制器处于失效状态的情况下,进入静默状态,以使所述第一控制器在确定所述智能控制器进入静默状态的情况下,执行制动操作。
7.根据权利要求5所述的方法,其特征在于,所述方法还包括:
在确定所述第二控制器驻车操作执行结束的情况下,向所述第一控制器发送力矩释放请求,以使所述第一控制器基于所述力矩释放请求执行制动力矩释放操作,所述力矩释放请求用于请求释放制动力矩。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201811458284.3A CN111252017B (zh) | 2018-11-30 | 2018-11-30 | 一种低速无人驾驶系统及方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201811458284.3A CN111252017B (zh) | 2018-11-30 | 2018-11-30 | 一种低速无人驾驶系统及方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN111252017A true CN111252017A (zh) | 2020-06-09 |
| CN111252017B CN111252017B (zh) | 2022-03-22 |
Family
ID=70923507
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201811458284.3A Active CN111252017B (zh) | 2018-11-30 | 2018-11-30 | 一种低速无人驾驶系统及方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN111252017B (zh) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112249000A (zh) * | 2020-10-30 | 2021-01-22 | 东风商用车有限公司 | 一种提高自动驾驶车辆行驶安全的系统及方法 |
| CN113359572A (zh) * | 2021-06-30 | 2021-09-07 | 中船重工海为郑州高科技有限公司 | 一种双模热备份无人驾驶控制系统和方法 |
| CN113602243A (zh) * | 2021-08-31 | 2021-11-05 | 东风商用车有限公司 | 一种无人驾驶车辆紧急制动装置 |
| CN116443039A (zh) * | 2023-03-28 | 2023-07-18 | 长城汽车股份有限公司 | 车辆控制方法、装置及车辆 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1922065A (zh) * | 2003-05-08 | 2007-02-28 | 克诺尔商用车制动系统有限公司 | 汽车,尤其是多用途运载车的具有至少两个独立的电子制动控制电路的制动装置 |
| US20150266457A1 (en) * | 2014-03-24 | 2015-09-24 | Ford Global Technologies, Llc | Braking system with selective braking backup system |
| CN108162947A (zh) * | 2017-11-20 | 2018-06-15 | 浙江亚太机电股份有限公司 | 一种用于电动汽车的驻车控制系统 |
| CN207931706U (zh) * | 2018-02-13 | 2018-10-02 | 重庆长安汽车股份有限公司 | 一种车辆冗余制动系统 |
| CN207931708U (zh) * | 2018-02-13 | 2018-10-02 | 重庆长安汽车股份有限公司 | 车辆冗余制动系统 |
| CN208053433U (zh) * | 2018-02-13 | 2018-11-06 | 重庆长安汽车股份有限公司 | 车辆冗余电子转向制动系统 |
-
2018
- 2018-11-30 CN CN201811458284.3A patent/CN111252017B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1922065A (zh) * | 2003-05-08 | 2007-02-28 | 克诺尔商用车制动系统有限公司 | 汽车,尤其是多用途运载车的具有至少两个独立的电子制动控制电路的制动装置 |
| US20150266457A1 (en) * | 2014-03-24 | 2015-09-24 | Ford Global Technologies, Llc | Braking system with selective braking backup system |
| CN108162947A (zh) * | 2017-11-20 | 2018-06-15 | 浙江亚太机电股份有限公司 | 一种用于电动汽车的驻车控制系统 |
| CN207931706U (zh) * | 2018-02-13 | 2018-10-02 | 重庆长安汽车股份有限公司 | 一种车辆冗余制动系统 |
| CN207931708U (zh) * | 2018-02-13 | 2018-10-02 | 重庆长安汽车股份有限公司 | 车辆冗余制动系统 |
| CN208053433U (zh) * | 2018-02-13 | 2018-11-06 | 重庆长安汽车股份有限公司 | 车辆冗余电子转向制动系统 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112249000A (zh) * | 2020-10-30 | 2021-01-22 | 东风商用车有限公司 | 一种提高自动驾驶车辆行驶安全的系统及方法 |
| CN113359572A (zh) * | 2021-06-30 | 2021-09-07 | 中船重工海为郑州高科技有限公司 | 一种双模热备份无人驾驶控制系统和方法 |
| CN113602243A (zh) * | 2021-08-31 | 2021-11-05 | 东风商用车有限公司 | 一种无人驾驶车辆紧急制动装置 |
| CN116443039A (zh) * | 2023-03-28 | 2023-07-18 | 长城汽车股份有限公司 | 车辆控制方法、装置及车辆 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111252017B (zh) | 2022-03-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111252017A (zh) | 一种低速无人驾驶系统及方法 | |
| CN114056311B (zh) | 一种车辆制动控制方法、装置及存储介质 | |
| CN109895787B (zh) | 一种车辆驾驶的控制方法及控制装置 | |
| CN107428247B (zh) | 用于具有附条件自动的驾驶辅助系统的架构 | |
| WO2022022254A1 (zh) | 制动冗余控制方法、系统和自动驾驶车辆 | |
| CN112141106A (zh) | 用于控制自主车辆制动的设备 | |
| CN111605562A (zh) | 智能驾驶车辆的安全控制系统及方法 | |
| CN111038474A (zh) | 一种轨道车辆抱死故障的判断方法及装置 | |
| CN111386218A (zh) | 用于在网络故障期间辅助驾驶车辆的方法及相关系统 | |
| CN110053630A (zh) | 车辆控制方法及装置 | |
| EP3385934A1 (de) | Vorrichtung für die steuerung eines sicherheitsrelevanten vorganges, verfahren zum testen der funktionsfähigkeit der vorrichtung, sowie kraftfahrzeug mit der vorrichtung | |
| CN118387120A (zh) | 分布式线控转向故障降级处理方法、车辆、设备和介质 | |
| CN204937116U (zh) | 一种基于方向盘的主动安全制动系统 | |
| US11926374B2 (en) | Torque compensating device and method | |
| CN116443039A (zh) | 车辆控制方法、装置及车辆 | |
| WO2023093536A1 (zh) | 一种自动驾驶控制系统及车辆 | |
| JP2019111866A (ja) | 自動運転システム | |
| CN110356399A (zh) | 一种动力系统扭矩监控的方法和装置 | |
| CN113830096A (zh) | 车辆的控制方法、设备及车辆 | |
| JP2015067234A (ja) | 車両制御装置 | |
| JP2025501147A (ja) | 自動運転方法とシステム、コントローラ、電子機器とコンピュータ記憶媒体 | |
| CN117555310A (zh) | 一种冗余智能驾驶控制器的功能设计方法、装置及设备 | |
| GB2547985A (en) | Vehicle subsystem communication arbitration | |
| CN118494515A (zh) | 车辆控制方法、装置、存储介质和车辆 | |
| CN117416325A (zh) | 一种车辆制动失效的预警方法、装置及车辆 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| TA01 | Transfer of patent application right |
Effective date of registration: 20210827 Address after: No. 203, Shanghai Songjiang Road, No. 201563, Pudong New Area Applicant after: SAIC MOTOR Corp.,Ltd. Address before: 201203 Room 509, Building No. 1, 563 Songtao Road, Zhangjiang High-tech Park, Pudong New Area, Shanghai Applicant before: SAIC Motor Corp.,Ltd. |
|
| TA01 | Transfer of patent application right | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |