CN112192592A - 一种具有精确测距性能的机械手 - Google Patents
一种具有精确测距性能的机械手 Download PDFInfo
- Publication number
- CN112192592A CN112192592A CN202011113164.7A CN202011113164A CN112192592A CN 112192592 A CN112192592 A CN 112192592A CN 202011113164 A CN202011113164 A CN 202011113164A CN 112192592 A CN112192592 A CN 112192592A
- Authority
- CN
- China
- Prior art keywords
- fixedly connected
- ring
- clamping
- limiting
- sliding
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 230000005540 biological transmission Effects 0.000 claims abstract description 28
- 230000007246 mechanism Effects 0.000 claims abstract description 27
- 238000005259 measurement Methods 0.000 claims abstract description 6
- 238000001125 extrusion Methods 0.000 claims description 5
- 239000003921 oil Substances 0.000 description 50
- 238000000034 method Methods 0.000 description 14
- 230000009471 action Effects 0.000 description 10
- 238000003825 pressing Methods 0.000 description 8
- 238000012546 transfer Methods 0.000 description 6
- 239000011435 rock Substances 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 235000017166 Bambusa arundinacea Nutrition 0.000 description 2
- 235000017491 Bambusa tulda Nutrition 0.000 description 2
- 241001330002 Bambuseae Species 0.000 description 2
- 235000015334 Phyllostachys viridis Nutrition 0.000 description 2
- 239000011425 bamboo Substances 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 241000196324 Embryophyta Species 0.000 description 1
- 238000007792 addition Methods 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 239000010779 crude oil Substances 0.000 description 1
- 210000001503 joint Anatomy 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/74—Feeding, transfer, or discharging devices of particular kinds or types
- B65G47/90—Devices for picking-up and depositing articles or materials
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Manipulator (AREA)
Abstract
本发明涉及机械手技术领域,具体涉及一种具有精确测距性能的机械手,包括支撑机构,其特征在于,所述支撑机构包括圆环,所述圆环的外侧壁呈环形等角度固定连接有四个转动座,所述圆环的内侧固定连接有H形底板,所述H形底板的顶面固定连接有两个对称分部的支撑柱,两个所述支撑柱的底部套接固定有限位板,且限位板的顶面开设有矩形通孔,两个所述支撑柱之间设置有抓取机构。本发明中,通过传动杆带动一号限位环与二号限位环上移时,由于限位块不能够通过矩形通孔使得一号限位环与二号限位环上移的距离减小,一号连接杆与二号连接杆之间的夹角减小,二号连接杆完成释放油桶,从而提高了机械手抓取与释放的工作效率。
Description
技术领域
本发明涉及机械手技术领域,具体涉及一种具有精确测距性能的机械手。
背景技术
机械手指能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,主要由执行机构、驱动机构和控制系统三大部分组成,机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,现在大部原油加工厂油桶的搬运转移都逐渐采用机械手代替人工,大大提高了油桶的搬运效率减轻了人人的劳动力度,但是部分机械手在抓取油桶时无法精确测量要操作的距离,导致抓取构件运作时出现滑落、误抓等失误,有的在抓取的过程中出现脱落,导致操作效率下降,并且部分机械手抓取与释放的工作过程繁琐导致机械手运作不灵活。
发明内容
为了克服上述的技术问题,本发明的目的在于提供一种具有精确测距性能的机械手,通过传动杆下压一号限位环使得一号限位环与二号限位环在两个支撑柱之间下移,在卡接环的卡接导向作用下卡接柱的两端在卡接槽上滑动,使得滑动柱顺时针转动90度,此时圆环下移至油桶的顶面,接着通过上移传动杆使一号限位环与二号限位环在两个支撑柱之间上移,此时轴杆底部的限位块通过矩形通孔,从而使一号限位环与二号限位环上移的距离变大,一号限位环与二号限位环上移的距离变大会使一号连接杆与二号连接杆之间夹角增大,实现二号连接杆夹紧油桶,从而提高了机械手抓取与释放的工作效率;
通过传动杆向下移动释放机械手上的油桶,当油桶的底面与地面接触时,继续通过传动杆下压一号限位环,使得一号限位环与二号限位环在两个支撑柱之间下移,此时卡接柱的两端均由卡接环上一个卡接槽滑动到另一个卡接槽,使得轴杆底部的限位块再次顺时针转动90度而不能够通过矩形通孔,当传动杆带动一号限位环与二号限位环上移时,由于限位块不能够通过矩形通孔使得一号限位环与二号限位环上移的距离减小,一号连接杆与二号连接杆之间的夹角减小,二号连接杆完成释放油桶,通过在固定块的内部开设有矩形腔,矩形腔一端的内侧壁与滑动块最贱固定连接有夹紧弹簧,当夹紧块与油桶贴靠后会逐渐挤压夹紧弹簧,在夹紧弹簧的弹力作用下,夹紧块与油桶的外侧紧密贴靠,避免油桶在抓取的过程中晃动,提高了机械手抓取有筒的安全性。
本发明的目的可以通过以下技术方案实现:
一种具有精确测距性能的机械手,包括支撑机构,其特征在于,所述支撑机构包括圆环,所述圆环的外侧壁呈环形等角度固定连接有四个转动座,所述圆环的外侧壁呈环形等角度固定连接有四个夹紧装置,所述圆环的内侧固定连接有H形底板,所述H形底板的顶面固定连接有两个对称分部的支撑柱,两个所述支撑柱的底部套接固定有限位板,且限位板的顶面开设有矩形通孔,两个所述支撑柱之间设置有抓取机构;
所述抓取机构包括一号限位环,所述一号限位环的两侧均固定连接有两个导向滑块,相邻两个所述导向滑块的内侧壁均与对应位置支撑柱的外侧壁滑动连接,所述一号限位环的下方设置有二号限位环,所述二号限位环的外侧与对应位置导向滑块靠近一号限位环的一侧固定连接,所述一号限位环与二号限位环的内侧壁均嵌入固定有卡接环,两个所述卡接环的内侧壁滑动卡接有滑动柱,所述滑动柱的底面固定连接有轴杆,所述轴杆的底端贯穿矩形通孔且固定连接有限位块,所述二号限位环的外侧呈环形等角度转动连接有四个一号连接杆,所述一号连接杆背离二号限位环的一端转动连接有二号连接杆,所述二号连接杆背离一号连接杆的一端固定连接有挤压块,所述一号限位环的顶部固定连接有用于驱动抓取机构抓取油桶的机械臂;
通过传动杆下压一号限位环使得一号限位环与二号限位环在两个支撑柱之间下移,在卡接环的卡接导向作用下卡接柱的两端在卡接槽上滑动,使得滑动柱顺时针转动90度,此时圆环下移至油桶的顶面,接着通过上移传动杆使一号限位环与二号限位环在两个支撑柱之间上移,此时轴杆底部的限位块通过矩形通孔,从而使一号限位环与二号限位环上移的距离变大,一号限位环与二号限位环上移的距离变大会使一号连接杆与二号连接杆之间夹角增大,实现二号连接杆夹紧油桶;
通过传动杆向下移动释放机械手上的油桶,当油桶的底面与地面接触时,继续通过传动杆下压一号限位环,使得一号限位环与二号限位环在两个支撑柱之间下移,此时卡接柱的两端均由卡接环上一个卡接槽滑动到另一个卡接槽,使得轴杆底部的限位块再次顺时针转动90度而不能够通过矩形通孔,当传动杆带动一号限位环与二号限位环上移时,由于限位块不能够通过矩形通孔使得一号限位环与二号限位环上移的距离减小,一号连接杆与二号连接杆之间的夹角减小,二号连接杆完成释放油桶,从而提高了机械手抓取与释放的工作效率。
进一步在于:所述机械臂一端的底面固定连接有控制箱,所述机械臂另一端固定连接有传动杆,所述传动杆的底面与一号限位环的顶面固定连接,便于通过机械臂移动机械手完成油桶的抓取与释放。
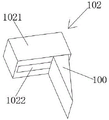
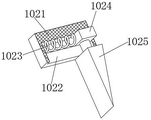
进一步在于:所述夹紧装置包括固定块,所述固定块的一侧与圆环的外侧壁固定连接,所述固定块的底面开设有滑动槽,所述固定块的内部开设有矩形腔,所述矩形腔一端的内侧壁固定连接有夹紧弹簧,所述夹紧弹簧背离矩形腔内侧壁的一端固定连接有滑动块,所述滑动块的底面固定连接有滑动柱,所述滑动柱的底面固定连接有夹紧块,当夹紧块与油桶贴靠后会逐渐挤压夹紧弹簧,在夹紧弹簧的弹力作用下,夹紧块与油桶的外侧紧密贴靠,避免油桶在抓取的过程中晃动,提高了机械手抓取有筒的安全性。
进一步在于:所述所述滑动块的外侧壁与矩形腔的内侧壁滑动连接,所述滑动柱的外侧壁与滑动槽的内侧壁滑动连接,便于夹紧块限位夹紧油桶。
进一步在于:所述滑动柱的外侧壁开设有圆形通孔,所述圆形通孔的内部壁嵌入固定有卡接柱,且卡接柱的两端均延伸至卡接柱的外侧,所述卡接环上均匀开设有四个卡接槽,便于卡接柱在卡接槽的作用下转动变换位置。
进一步在于:所述卡接柱两端的外侧壁均与对应位置卡接槽滑动靠接,且卡接柱的长度大于卡接环截面圆的直径,便于卡接柱与卡接槽滑动卡接。
进一步在于:所述二号限位环的的外侧壁呈环形等角度固定连接有四个连接座,所述连接座的外侧壁与一号连接杆的内侧壁转动连接,便于二号限位环带动一号连接杆转动。
进一步在于:所述矩形通孔与限位块二者的长度与宽度均相同,所述限位板与H形底板之间的距离大于限位块的厚度,便于限位块在矩形通孔的下方转动且能够通过矩形通孔。
进一步在于:所述一号限位环与二号限位环的形状和尺寸均相同,且一号限位环与二号限位环的外侧形状为正六边形,便于一号限位环与二号限位环同步移动。
本发明的有益效果:
1、通过传动杆下压一号限位环使得一号限位环与二号限位环在两个支撑柱之间下移,在卡接环的卡接导向作用下卡接柱的两端在卡接槽上滑动,使得滑动柱顺时针转动90度,此时圆环下移至油桶的顶面,接着通过上移传动杆使一号限位环与二号限位环在两个支撑柱之间上移,此时轴杆底部的限位块通过矩形通孔,从而使一号限位环与二号限位环上移的距离变大,一号限位环与二号限位环上移的距离变大会使一号连接杆与二号连接杆之间夹角增大,实现二号连接杆夹紧油桶;
2、通过传动杆向下移动释放机械手上的油桶,当油桶的底面与地面接触时,继续通过传动杆下压一号限位环,使得一号限位环与二号限位环在两个支撑柱之间下移,此时卡接柱的两端均由卡接环上一个卡接槽滑动到另一个卡接槽,使得轴杆底部的限位块再次顺时针转动90度而不能够通过矩形通孔,当传动杆带动一号限位环与二号限位环上移时,由于限位块不能够通过矩形通孔使得一号限位环与二号限位环上移的距离减小,一号连接杆与二号连接杆之间的夹角减小,二号连接杆完成释放油桶,从而提高了机械手抓取与释放的工作效率;
3、通过在固定块的内部开设有矩形腔,矩形腔一端的内侧壁与滑动块最贱固定连接有夹紧弹簧,当夹紧块与油桶贴靠后会逐渐挤压夹紧弹簧,在夹紧弹簧的弹力作用下,夹紧块与油桶的外侧紧密贴靠,避免油桶在抓取的过程中晃动,提高了机械手抓取有筒的安全性。
附图说明
下面结合附图对本发明作进一步的说明。
图1是本发明整体结构示意图;
图2是本发明中支撑机构与抓取机构结构示意图;
图3是本发明中支撑机构结构示意图;
图4是本发明中抓取机构结构示意图;
图5本发明中卡接环结构示意图;
图6本发明中夹紧装置结构示意图;
图7本发明中夹紧装置内部结构示意图。
图中:100、支撑机构;101、圆环;1011、转动座;102、夹紧装置;1021、固定块;1022、滑动槽;1023、夹紧弹簧;1024、滑动块;1025、夹紧块;103、H形底板;104、支撑柱;105、限位板;1051、矩形通孔;200、抓取机构;201、一号限位环;202、导向滑块;203、二号限位环;204、卡接环;2041、卡接槽;205、滑动柱;2051、卡接柱;206、轴杆;2061、限位块;207、一号连接杆;208、二号连接杆;2081、挤压块;300、机械臂;301、控制箱;302、传动杆。
具体实施方式
下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
请参阅图1-7所示,一种具有精确测距性能的机械手,包括支撑机构100,支撑机构100包括圆环101,圆环101的外侧壁呈环形等角度固定连接有四个转动座1011,圆环101的外侧壁呈环形等角度固定连接有四个夹紧装置102,圆环101的内侧固定连接有H形底板103,H形底板103的顶面固定连接有两个对称分部的支撑柱104,两个支撑柱104的底部套接固定有限位板105,且限位板105的顶面开设有矩形通孔1051,两个支撑柱104之间设置有抓取机构200;
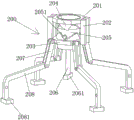
抓取机构200包括一号限位环201,一号限位环201的两侧均固定连接有两个导向滑块202,相邻两个导向滑块202的内侧壁均与对应位置支撑柱104的外侧壁滑动连接,一号限位环201的下方设置有二号限位环203,二号限位环203的外侧与对应位置导向滑块202靠近一号限位环201的一侧固定连接,一号限位环201与二号限位环203的内侧壁均嵌入固定有卡接环204,两个卡接环204的内侧壁滑动卡接有滑动柱205,滑动柱205的底面固定连接有轴杆206,轴杆206的底端贯穿矩形通孔1051且固定连接有限位块2061,二号限位环203的外侧呈环形等角度转动连接有四个一号连接杆207,一号连接杆207背离二号限位环203的一端转动连接有二号连接杆208,二号连接杆208背离一号连接杆207的一端固定连接有挤压块2081,一号限位环201的顶部固定连接有用于驱动抓取机构200抓取油桶的机械臂300;
通过传动杆302下压一号限位环201使得一号限位环201与二号限位环203在两个支撑柱104之间下移,在卡接环204的卡接导向作用下卡接柱2051的两端在卡接槽2041上滑动,使得滑动柱205顺时针转动90度,此时圆环101下移至油桶的顶面,接着通过上移传动杆302使一号限位环201与二号限位环203在两个支撑柱104之间上移,此时轴杆206底部的限位块2061通过矩形通孔1051,从而使一号限位环201与二号限位环203上移的距离变大,一号限位环201与二号限位环203上移的距离变大会使一号连接杆207与二号连接杆208之间夹角增大,实现二号连接杆208夹紧油桶;
通过传动杆302向下移动释放机械手上的油桶,当油桶的底面与地面接触时,继续通过传动杆302下压一号限位环201,使得一号限位环201与二号限位环203在两个支撑柱104之间下移,此时卡接柱2051的两端均由卡接环204上一个卡接槽2041滑动到另一个卡接槽2041,使得轴杆206底部的限位块2061再次顺时针转动90度而不能够通过矩形通孔1051,当传动杆302带动一号限位环201与二号限位环203上移时,由于限位块2061不能够通过矩形通孔1051使得一号限位环201与二号限位环203上移的距离减小,一号连接杆207与二号连接杆208之间的夹角减小,二号连接杆208完成释放油桶,从而提高了机械手抓取与释放的工作效率。
机械臂300一端的底面固定连接有控制箱301,机械臂300另一端固定连接有传动杆302,传动杆302的底面与一号限位环201的顶面固定连接,便于通过机械臂300移动机械手完成油桶的抓取与释放;夹紧装置102包括固定块1021,固定块1021的一侧与圆环101的外侧壁固定连接,固定块1021的底面开设有滑动槽1022,固定块1021的内部开设有矩形腔,矩形腔一端的内侧壁固定连接有夹紧弹簧1023,夹紧弹簧1023背离矩形腔内侧壁的一端固定连接有滑动块1024,滑动块1024的底面固定连接有滑动柱205,滑动柱205的底面固定连接有夹紧块1025,当夹紧块1025与油桶贴靠后会逐渐挤压夹紧弹簧1023,在夹紧弹簧1023的弹力作用下,夹紧块1025与油桶的外侧紧密贴靠,避免油桶在抓取的过程中晃动,提高了机械手抓取有筒的安全性。
滑动块1024的外侧壁与矩形腔的内侧壁滑动连接,滑动柱205的外侧壁与滑动槽1022的内侧壁滑动连接,便于夹紧块1025限位夹紧油桶;滑动柱205的外侧壁开设有圆形通孔,圆形通孔的内部壁嵌入固定有卡接柱2051,且卡接柱2051的两端均延伸至卡接柱2051的外侧,卡接环204上均匀开设有四个卡接槽2041,便于卡接柱2051在卡接槽2041的作用下转动变换位置;卡接柱2051两端的外侧壁均与对应位置卡接槽2041滑动靠接,且卡接柱2051的长度大于卡接环204截面圆的直径,便于卡接柱2051与卡接槽2041滑动卡接。
二号限位环203的的外侧壁呈环形等角度固定连接有四个连接座,连接座的外侧壁与一号连接杆207的内侧壁转动连接,便于二号限位环203带动一号连接杆207转动;矩形通孔1051与限位块2061二者的长度与宽度均相同,限位板105与H形底板103之间的距离大于限位块2061的厚度,便于限位块2061在矩形通孔1051的下方转动且能够通过矩形通孔1051;一号限位环201与二号限位环203的形状和尺寸均相同,且一号限位环201与二号限位环203的外侧形状为正六边形,便于一号限位环201与二号限位环203同步移动。
工作原理:使用时,传动杆302下压一号限位环201使得一号限位环201与二号限位环203在两个支撑柱104之间向下移动,在卡接环204的卡接导向作用下卡接柱2051的两端在卡接槽2041上滑动,使得滑动柱205顺时针转动90度,此时圆环101下移至油桶的顶面,圆环101外侧夹紧装置102上的夹紧块1025在夹紧弹簧1023的作用下限位夹紧油桶,接着通过上移传动杆302使一号限位环201与二号限位环203在两个支撑柱104之间上移,此时轴杆206底部的限位块2061通过矩形通孔1051,从而使一号限位环201与二号限位环203上移的距离变大,一号限位环201与二号限位环203上移的距离变大会使一号连接杆207与二号连接杆208之间夹角增大,一号连接杆207带动二号连接杆208通过挤压块2081夹紧油桶;
当需要释放油桶时,传动杆302向下移动释放机械手上的油桶,当油桶的底面与地面接触时,传动杆302继续下压一号限位环201,使得一号限位环201与二号限位环203在两个支撑柱104之间下移,此时卡接柱2051的两端均由卡接环204上一个卡接槽2041滑动到另一个卡接槽2041,使得轴杆206底部的限位块2061再次顺时针转动90度而不能够通过矩形通孔1051,当传动杆302带动一号限位环201与二号限位环203上移时,由于限位块2061不能够通过矩形通孔1051使得一号限位环201与二号限位环203上移的距离较抓取油桶时上升的距离减小,一号连接杆207与二号连接杆208之间的夹角减小,此时二号连接杆208端部的挤压块2081仅与油桶贴靠,随着传动杆302的上移二号连接杆208完成释放油桶。
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
以上内容仅仅是对本发明所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离发明或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
Claims (9)
1.一种具有精确测距性能的机械手,包括支撑机构(100),其特征在于,所述支撑机构(100)包括圆环(101),所述圆环(101)的外侧壁呈环形等角度固定连接有四个转动座(1011),所述圆环(101)的外侧壁呈环形等角度固定连接有四个夹紧装置(102),所述圆环(101)的内侧固定连接有H形底板(103),所述H形底板(103)的顶面固定连接有两个对称分部的支撑柱(104),两个所述支撑柱(104)的底部套接固定有限位板(105),且限位板(105)的顶面开设有矩形通孔(1051),两个所述支撑柱(104)之间设置有抓取机构(200);
所述抓取机构(200)包括一号限位环(201),所述一号限位环(201)的两侧均固定连接有两个导向滑块(202),相邻两个所述导向滑块(202)的内侧壁均与对应位置支撑柱(104)的外侧壁滑动连接,所述一号限位环(201)的下方设置有二号限位环(203),所述二号限位环(203)的外侧与对应位置导向滑块(202)靠近一号限位环(201)的一侧固定连接,所述一号限位环(201)与二号限位环(203)的内侧壁均嵌入固定有卡接环(204),两个所述卡接环(204)的内侧壁滑动卡接有滑动柱(205),所述滑动柱(205)的底面固定连接有轴杆(206),所述轴杆(206)的底端贯穿矩形通孔(1051)且固定连接有限位块(2061),所述二号限位环(203)的外侧呈环形等角度转动连接有四个一号连接杆(207),所述一号连接杆(207)背离二号限位环(203)的一端转动连接有二号连接杆(208),所述二号连接杆(208)背离一号连接杆(207)的一端固定连接有挤压块(2081),所述一号限位环(201)的顶部固定连接有用于驱动抓取机构(200)抓取油桶的机械臂(300)。
2.根据权利要求1所述的一种具有精确测距性能的机械手,其特征在于,所述机械臂(300)一端的底面固定连接有控制箱(301),所述机械臂(300)另一端固定连接有传动杆(302),所述传动杆(302)的底面与一号限位环(201)的顶面固定连接。
3.根据权利要求1所述的一种具有精确测距性能的机械手,其特征在于,所述夹紧装置(102)包括固定块(1021),所述固定块(1021)的一侧与圆环(101)的外侧壁固定连接,所述固定块(1021)的底面开设有滑动槽(1022),所述固定块(1021)的内部开设有矩形腔,所述矩形腔一端的内侧壁固定连接有夹紧弹簧(1023),所述夹紧弹簧(1023)背离矩形腔内侧壁的一端固定连接有滑动块(1024),所述滑动块(1024)的底面固定连接有滑动柱,所述滑动柱的底面固定连接有夹紧块(1025)。
4.根据权利要求3所述的一种具有精确测距性能的机械手,其特征在于,所述所述滑动块(1024)的外侧壁与矩形腔的内侧壁滑动连接,所述滑动柱的外侧壁与滑动槽(1022)的内侧壁滑动连接。
5.根据权利要求1所述的一种具有精确测距性能的机械手,其特征在于,所述滑动柱(205)的外侧壁开设有圆形通孔,所述圆形通孔的内部壁嵌入固定有卡接柱(2051),且卡接柱(2051)的两端均延伸至卡接柱(205)的外侧,所述卡接环(204)上均匀开设有四个卡接槽(2041)。
6.根据权利要求5所述的一种具有精确测距性能的机械手,其特征在于,所述卡接柱(2051)两端的外侧壁均与对应位置卡接槽(2041)滑动靠接,且卡接柱(2051)的长度大于卡接环(204)截面圆的直径。
7.根据权利要求1所述的一种具有精确测距性能的机械手,其特征在于,所述二号限位环(203)的的外侧壁呈环形等角度固定连接有四个连接座,所述连接座的外侧壁与一号连接杆(207)的内侧壁转动连接。
8.根据权利要求1所述的一种具有精确测距性能的机械手,其特征在于,所述矩形通孔(1051)与限位块(2061)二者的长度与宽度均相同,所述限位板(105)与H形底板(103)之间的距离大于限位块(2061)的厚度。
9.根据权利要求1所述的一种具有精确测距性能的机械手,其特征在于,所述一号限位环(201)与二号限位环(203)的形状和尺寸均相同,且一号限位环(201)与二号限位环(203)的外侧形状为正六边形。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011113164.7A CN112192592A (zh) | 2020-10-17 | 2020-10-17 | 一种具有精确测距性能的机械手 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011113164.7A CN112192592A (zh) | 2020-10-17 | 2020-10-17 | 一种具有精确测距性能的机械手 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN112192592A true CN112192592A (zh) | 2021-01-08 |
Family
ID=74009197
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202011113164.7A Withdrawn CN112192592A (zh) | 2020-10-17 | 2020-10-17 | 一种具有精确测距性能的机械手 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112192592A (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114434494A (zh) * | 2021-12-21 | 2022-05-06 | 重庆特斯联智慧科技股份有限公司 | 一种带有加热保温内胆的机器人 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108746867A (zh) * | 2018-07-05 | 2018-11-06 | 佛山市南海惠家五金制品有限公司 | 一种环保型五金板件边缘开槽装置 |
| CN108817452A (zh) * | 2018-05-30 | 2018-11-16 | 合肥智慧龙图腾知识产权股份有限公司 | 一种下压稳定型圆盘圆心开孔装置 |
| CN108942982A (zh) * | 2018-07-23 | 2018-12-07 | 武汉理工大学 | 一种具有灭菌消毒功能的吹塑盘机械手夹爪机构 |
| CN109531534A (zh) * | 2018-11-30 | 2019-03-29 | 吴宏宽 | 一种建筑用环保型利用太阳能的搬运设施 |
| CN209831416U (zh) * | 2019-04-12 | 2019-12-24 | 赵家琦 | 一种工业机械加工用定位装置 |
| CN210452774U (zh) * | 2019-08-06 | 2020-05-05 | 无锡市华通气动制造有限公司 | 一种气动夹抓装置 |
| CN211590156U (zh) * | 2020-01-07 | 2020-09-29 | 深圳市海目星激光智能装备股份有限公司 | 能够调整相邻夹爪间距的夹取装置与设备 |
-
2020
- 2020-10-17 CN CN202011113164.7A patent/CN112192592A/zh not_active Withdrawn
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108817452A (zh) * | 2018-05-30 | 2018-11-16 | 合肥智慧龙图腾知识产权股份有限公司 | 一种下压稳定型圆盘圆心开孔装置 |
| CN108746867A (zh) * | 2018-07-05 | 2018-11-06 | 佛山市南海惠家五金制品有限公司 | 一种环保型五金板件边缘开槽装置 |
| CN108942982A (zh) * | 2018-07-23 | 2018-12-07 | 武汉理工大学 | 一种具有灭菌消毒功能的吹塑盘机械手夹爪机构 |
| CN109531534A (zh) * | 2018-11-30 | 2019-03-29 | 吴宏宽 | 一种建筑用环保型利用太阳能的搬运设施 |
| CN209831416U (zh) * | 2019-04-12 | 2019-12-24 | 赵家琦 | 一种工业机械加工用定位装置 |
| CN210452774U (zh) * | 2019-08-06 | 2020-05-05 | 无锡市华通气动制造有限公司 | 一种气动夹抓装置 |
| CN211590156U (zh) * | 2020-01-07 | 2020-09-29 | 深圳市海目星激光智能装备股份有限公司 | 能够调整相邻夹爪间距的夹取装置与设备 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114434494A (zh) * | 2021-12-21 | 2022-05-06 | 重庆特斯联智慧科技股份有限公司 | 一种带有加热保温内胆的机器人 |
| CN114434494B (zh) * | 2021-12-21 | 2024-05-24 | 北京未末卓然科技有限公司 | 一种带有加热保温内胆的机器人 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110271029B (zh) | 一种桁架机器人的伺服驱动弹性夹爪 | |
| CN105150224A (zh) | 一种双重夹持的机械抓手装置 | |
| CN112192592A (zh) | 一种具有精确测距性能的机械手 | |
| CN104515490B (zh) | 一种翻转式在线外径自动测量装置 | |
| CN106820493A (zh) | 一种智能打孔串珠机器人 | |
| CN109605414A (zh) | 带轮转动空程直线平夹自适应机器人手指装置 | |
| CN110977977B (zh) | 一种抓取用径向调节装置及机器人抓取系统 | |
| CN216299340U (zh) | 一种装卸机械手钳口调节杆 | |
| CN108582046B (zh) | 一种刷毛搬运机械手 | |
| CN213532666U (zh) | 一种能够提高夹持效果的手爪机构 | |
| CN214520246U (zh) | 一种空调热交换器抓取抓手 | |
| JP2020116699A (ja) | チャッキング装置 | |
| CN108527312A (zh) | 一种拿取稳定的机器人用机械手 | |
| CN213890048U (zh) | 用于智能小车的新型机械夹爪 | |
| CN212639707U (zh) | 一种机械自动化抓取装置 | |
| CN205009241U (zh) | 一种双重夹持的机械抓手装置 | |
| CN116443467A (zh) | 一种物料移载装置 | |
| CN214560988U (zh) | 双工位多功能机器人手爪 | |
| CN210551221U (zh) | 五金件的取放料机构 | |
| CN219005062U (zh) | 一种中层板焊接工装 | |
| CN217097835U (zh) | 一种机器人机械臂 | |
| CN216971216U (zh) | 一种桶类物料移栽抓取机构 | |
| JPH0748361Y2 (ja) | ワーク取扱装置のワーク把持機構 | |
| CN118906033B (zh) | 一种多功能机械手臂及机械手 | |
| CN219688597U (zh) | 一种变间距夹取工装 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| WW01 | Invention patent application withdrawn after publication |
Application publication date: 20210108 |
|
| WW01 | Invention patent application withdrawn after publication |