CN112720425A - 一种含伸缩杆的双层三段导轨式平面机器人 - Google Patents
一种含伸缩杆的双层三段导轨式平面机器人 Download PDFInfo
- Publication number
- CN112720425A CN112720425A CN202110038358.3A CN202110038358A CN112720425A CN 112720425 A CN112720425 A CN 112720425A CN 202110038358 A CN202110038358 A CN 202110038358A CN 112720425 A CN112720425 A CN 112720425A
- Authority
- CN
- China
- Prior art keywords
- guide rail
- plane
- curve guide
- plane curve
- section
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/003—Program-controlled manipulators having parallel kinematics
- B25J9/0033—Program-controlled manipulators having parallel kinematics with kinematics chains having a prismatic joint at the base
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
- B25J5/02—Manipulators mounted on wheels or on carriages travelling along a guideway
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
Abstract
一种含伸缩杆的双层三段导轨式平面机器人,包括固定平台、运动平台和连接于固定平台与运动平台之间的三条结构相同的支链,所述固定平台上设置有三段平面曲线导轨Ⅰ,所述运动平台固定连接有三段平面曲线导轨Ⅱ,每段平面曲线导轨Ⅰ均通过一条支链与与其对应的一段平面曲线导轨Ⅱ连接,每条支链均包括滑块Ⅰ、伸缩杆以及滑块Ⅱ,所述滑块Ⅰ与平面曲线导轨Ⅰ滑动连接,所述滑块Ⅰ与伸缩杆的一端固定连接,所述伸缩杆的另一端与滑块Ⅱ固定连接,所述滑块Ⅱ与平面曲线导轨Ⅱ滑动连接;三个伸缩杆或者三个滑块I为原动件;三段平面曲线导轨Ⅰ为不同圆心的弧形导轨,三段平面曲线导轨Ⅱ为不同圆心的弧形导轨。
Description
技术领域
本发明涉及机器人技术领域,具体是一种含伸缩杆的双层三段导轨式平面机器人。
背景技术
并联机器人具有刚度大、承载能力大、精度高、运动负荷小、反解容易等特点,因此在运动模拟器、虚拟轴机床、体感模拟机、医疗设备、农业作业机器人等方面都有广泛的应用。
对于三自由度机器人的研究,很多学者做了大量的工作。余跃庆基于3-RRR并联机器人提出了一种具有3个柔性铰链的平面并联机器人实验装置,该装置能使机构的运动平台实现沿轴X、Y方向的移动以及绕轴Z方向的转动。Herve基于李群和李代数理论成功的综合出了三自由度平移并联机器人,如3-RRC并联机器人。黄真基于螺旋理论原理提出了包括多种三自由度平移并联机器人在内的少自由度并联机器人型综合方法。李秦川利用螺旋理论进行了系统的对称三自由度并联机器人型综合。高峰基于GF集理论综合出了多种结构新颖的对称和非对称的三自由度平移并联机器人。2011年,陈风明等人提出了一种新型两平移一转动RRR-URR-RR并联机器人,对此机构的运动输出特性进行分析,并对自由度进行计算,建立了并联机器人的位置正、反解方程。2016年,常州大学朱伟等人发明了一种两平移一转动并联机器人,通过三个主动驱动的移动运动副驱动动平台运动,实现空间内的两维平动运动和一维旋转运动。2018年,燕山大学李艳文等人提出了一种两平移一转动2RRR-CRR并联机器人,该机构只包含移动副和转动副(圆柱副是由移动副和转动副组合而成),且多数为转动副,使得机构结构简单,轴线关系容易满足。
尽管国内外学者提供了较多三自由度机器人构型方案,但是平面三自由度机器人在不同应用领域具有不同的性能需求,因此提供尽可能多的具有两个平动自由度和一个转动自由度的机器人构型类型,对本领域的研究人员选型具有重要意义。
发明内容
本发明所要解决的技术问题,就是针对现有技术所存在的不足,提供一种含伸缩杆的双层三段导轨式平面机器人,其结构新颖,并且具有两个平动自由度和一个转动自由度。
本方案是通过如下技术措施来实现的:一种含伸缩杆的双层三段导轨式平面机器人,包括固定平台、运动平台和连接于固定平台与运动平台之间的三条结构相同的支链,所述固定平台上设置有三段平面曲线导轨Ⅰ,所述运动平台固定连接有三段平面曲线导轨Ⅱ,每段平面曲线导轨Ⅰ均通过一条支链与与其对应的一段平面曲线导轨Ⅱ连接,每条支链均包括滑块Ⅰ、伸缩杆以及滑块Ⅱ,所述滑块Ⅰ与平面曲线导轨Ⅰ滑动连接,所述滑块Ⅰ与伸缩杆的一端固定连接,所述伸缩杆的另一端与滑块Ⅱ固定连接,所述滑块Ⅱ与平面曲线导轨Ⅱ滑动连接;三个伸缩杆或者三个滑块I为原动件;三段平面曲线导轨Ⅰ为不同圆心的弧形导轨,三段平面曲线导轨Ⅱ为不同圆心的弧形导轨。
优选的,所述伸缩杆包括套筒,所述套筒内滑动连接有连接杆,所述套筒的一端与滑块Ⅰ固定连接,所述连接杆伸出套筒的一端与滑块Ⅱ固定连接。
优选的,所述平面曲线导轨Ⅰ的长度大于平面曲线导轨Ⅱ的长度,所述平面曲线导轨Ⅰ的宽度大于平面曲线导轨Ⅱ的宽度。
优选的,所述运动平台通过三个固定杆固定连接有三段平面曲线导轨Ⅱ。
优选的,三个滑块Ⅰ相对于平面曲线导轨I的运动平面Ⅰ为同一平面或为平行的平面。
优选的,三个滑块Ⅱ相对于平面曲线导轨II的运动平面Ⅱ为同一平面或为平行的平面。
本发明与现有技术相比,其优点为:在固定平台和运动平台上同时引入三段导轨结构,与伸缩杆、滑块Ⅰ、滑块Ⅱ配合使用,既保证了机器人具有两个平动自由度和一个转动自由度的运动特征,又可以通过独立增加各段导轨长度和/或伸缩杆的长度实现在特定自由度上增大工作空间,提高了机器人设计的灵活性,同时该结构中三个伸缩杆或者三个滑块I均可作为原动件,提高了机器人驱动方式选择的灵活性。
由此可见,本发明与现有技术相比,具有突出的实质性特点和显著的进步,其实施的有益效果也是显而易见的。
附图说明
为了更清楚地说明本发明的技术方案,下面将对描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
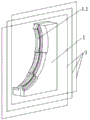
图1为本发明的结构示意图;
图2为固定平台的结构示意图一;
图3为固定平台的结构示意图二;
图4为运动平台与平面曲线导轨Ⅱ的连接结构示意图一;
图5为运动平台与平面曲线导轨Ⅱ的连接结构示意图二。
图中:1-固定平台,1.1-平面曲线导轨Ⅰ,2-滑块Ⅰ,4-伸缩杆,4.1-套筒,4.2-连接杆,5-滑块Ⅱ,6-运动平台,7-平面曲线导轨Ⅱ,8-固定杆,9-运动平面Ⅰ,10-运动平面Ⅱ。
具体实施方式
为使得本发明的发明目的、特征、优点能够更加的明显和易懂,下面将运用具体的实施例及附图,对本发明保护的技术方案进行清楚、完整地描述,显然,下面所描述的实施例仅仅是本发明一部分实施例,而非全部的实施例。基于本专利中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本专利保护的范围。
如图1所示,一种含伸缩杆的双层三段导轨式平面机器人,包括固定平台1、运动平台6和连接于固定平台1与运动平台6之间的三条结构相同的支链,所述固定平台1上设置有三段平面曲线导轨Ⅰ1.1,所述运动平台6固定连接有三段平面曲线导轨Ⅱ7,每段平面曲线导轨Ⅰ1.1均通过一条支链与与其对应的一段平面曲线导轨Ⅱ7连接,每条支链均包括滑块Ⅰ2、伸缩杆4以及滑块Ⅱ5,所述滑块Ⅰ2与平面曲线导轨Ⅰ1.1滑动连接,所述滑块Ⅰ2与伸缩杆4的一端固定连接,所述伸缩杆4的另一端与滑块Ⅱ5固定连接,所述滑块Ⅱ5与平面曲线导轨Ⅱ7滑动连接;三个伸缩杆4或者三个滑块I2为原动件;三段平面曲线导轨Ⅰ1.1为不同圆心的弧形导轨,三段平面曲线导轨Ⅱ7为不同圆心的弧形导轨。优选的,三段平面曲线导轨Ⅰ1.1为不同圆心的圆弧形导轨,三段平面曲线导轨Ⅱ7为不同圆心的圆弧形导轨。
所述伸缩杆4包括套筒4.1,所述套筒4.1内滑动连接有连接杆4.2,所述套筒4.1的一端与滑块Ⅰ2固定连接,所述连接杆4.2伸出套筒4.1的一端与滑块Ⅱ5固定连接。
所述平面曲线导轨Ⅰ1.1的长度大于平面曲线导轨Ⅱ7的长度,所述平面曲线导轨Ⅰ1.1的宽度大于平面曲线导轨Ⅱ7的宽度。
所述运动平台6通过三个固定杆8固定连接有三段平面曲线导轨Ⅱ7。
在本技术方案中,三条结构相同的支链指的是三条支链包含的部件以及部件之间的连接关系相同,但三条支链中的相同部件的尺寸可以不同。
如图2-3所示,三个滑块Ⅰ2分别相对于三段平面曲线导轨I1.1的三个运动平面Ⅰ9为同一平面或为平行的平面。
如图4-5所示,三个滑块Ⅱ5分别相对于三段平面曲线导轨II7的三个运动平面Ⅱ10为同一平面或为平行的平面。
在本技术方案中,平面曲线导轨Ⅰ1.1,顾名思义就是滑块Ⅰ2沿着导轨做平面曲线运动;平面曲线导轨Ⅱ7,顾名思义就是滑块Ⅱ5沿着导轨做平面曲线运动。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参考即可。
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点、创造性的特点相一致的最宽的范围。
Claims (6)
1.一种含伸缩杆的双层三段导轨式平面机器人,包括固定平台(1)、运动平台(6)和连接于固定平台(1)与运动平台(6)之间的三条结构相同的支链,其特征在于:所述固定平台(1)上设置有三段平面曲线导轨Ⅰ(1.1),所述运动平台(6)固定连接有三段平面曲线导轨Ⅱ(7),每段平面曲线导轨Ⅰ(1.1)均通过一条支链与与其对应的一段平面曲线导轨Ⅱ(7)连接,每条支链均包括滑块Ⅰ(2)、伸缩杆(4)以及滑块Ⅱ(5),所述滑块Ⅰ(2)与平面曲线导轨Ⅰ(1.1)滑动连接,所述滑块Ⅰ(2)与伸缩杆(4)的一端固定连接,所述伸缩杆(4)的另一端与滑块Ⅱ(5)固定连接,所述滑块Ⅱ(5)与平面曲线导轨Ⅱ(7)滑动连接;三个伸缩杆(4)或者三个滑块I(2)为原动件;三段平面曲线导轨Ⅰ(1.1)为不同圆心的弧形导轨,三段平面曲线导轨Ⅱ(7)为不同圆心的弧形导轨。
2.根据权利要求1所述的含伸缩杆的双层三段导轨式平面机器人,其特征在于:所述伸缩杆(4)包括套筒(4.1),所述套筒(4.1)内滑动连接有连接杆(4.2),所述套筒(4.1)的一端与滑块Ⅰ(2)固定连接,所述连接杆(4.2)伸出套筒(4.1)的一端与滑块Ⅱ(5)固定连接。
3.根据权利要求1所述的含伸缩杆的双层三段导轨式平面机器人,其特征在于:所述平面曲线导轨Ⅰ(1.1)的长度大于平面曲线导轨Ⅱ(7)的长度,所述平面曲线导轨Ⅰ(1.1)的宽度大于平面曲线导轨Ⅱ(7)的宽度。
4.根据权利要求1所述的含伸缩杆的双层三段导轨式平面机器人,其特征在于:所述运动平台(6)通过三个固定杆(8)固定连接有三段平面曲线导轨Ⅱ(7)。
5.根据权利要求1所述的含伸缩杆的双层三段导轨式平面机器人,其特征在于:三个滑块Ⅰ(2)相对于平面曲线导轨I(1.1)的运动平面Ⅰ(9)为同一平面或为平行的平面。
6.根据权利要求1所述的含伸缩杆的双层三段导轨式平面机器人,其特征在于:三个滑块Ⅱ(5)相对于平面曲线导轨II(7)的运动平面Ⅱ(10)为同一平面或为平行的平面。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110038358.3A CN112720425A (zh) | 2021-01-12 | 2021-01-12 | 一种含伸缩杆的双层三段导轨式平面机器人 |
| ZA2021/06458A ZA202106458B (en) | 2021-01-12 | 2021-09-03 | Double-layer three-section guide rail planar robot with telescopic rod |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110038358.3A CN112720425A (zh) | 2021-01-12 | 2021-01-12 | 一种含伸缩杆的双层三段导轨式平面机器人 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN112720425A true CN112720425A (zh) | 2021-04-30 |
Family
ID=75590596
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110038358.3A Withdrawn CN112720425A (zh) | 2021-01-12 | 2021-01-12 | 一种含伸缩杆的双层三段导轨式平面机器人 |
Country Status (2)
| Country | Link |
|---|---|
| CN (1) | CN112720425A (zh) |
| ZA (1) | ZA202106458B (zh) |
-
2021
- 2021-01-12 CN CN202110038358.3A patent/CN112720425A/zh not_active Withdrawn
- 2021-09-03 ZA ZA2021/06458A patent/ZA202106458B/en unknown
Also Published As
| Publication number | Publication date |
|---|---|
| ZA202106458B (en) | 2021-10-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112720423B (zh) | 一种含双平行四边形的单层三段导轨式平面机器人 | |
| CN106426149B (zh) | 基于拮抗式变刚度驱动器的2-dof柔性机械臂 | |
| CN101190527A (zh) | 二自由度移动并联解耦机构 | |
| CN102556200B (zh) | 一种四足步行器 | |
| CN113459124B (zh) | 一种用于大型圆雕的柔索牵引式五轴雕刻机器人 | |
| CN108858141B (zh) | 一种空间两转动一平动的冗余约束并联机构及其工作方法 | |
| CN102350697A (zh) | 一种含5r闭环子链的两自由度并联机构 | |
| CN112276910B (zh) | 一种含有双滑轨复合支链的并联机构 | |
| CN109079761B (zh) | 一种含闭环支链的两转一移的并联机器人 | |
| CN102579137B (zh) | 一种可实现三维平动一维转动的并联手术机械手 | |
| CN208468376U (zh) | 一种空间两转动一平动的冗余约束并联机构 | |
| CN112720424B (zh) | 一种含平行四边形的双层三段导轨式平面机器人 | |
| CN114227648A (zh) | 一种高刚度五自由度并联驱动机器人 | |
| CN112720421B (zh) | 一种含伸缩杆的双导轨式平面机器人 | |
| CN112720425A (zh) | 一种含伸缩杆的双层三段导轨式平面机器人 | |
| CN109108950B (zh) | 一种低运动质量的空间三自由度并联机构及使用方法 | |
| CN113319811B (zh) | 一种含转动副的双导轨式平面机器人 | |
| CN112720420B (zh) | 一种含平行四边形的双导轨式平面机器人 | |
| CN112720426A (zh) | 一种含转动副的双层三段导轨式平面机器人 | |
| CN202241279U (zh) | 一种含5r闭环子链的两自由度并联机构 | |
| CN102873681A (zh) | 一种新型二自由度机械手机构 | |
| CN113146587B (zh) | 一种含双平行四边形的单层单段导轨式平面机器人 | |
| CN112720419A (zh) | 一种含双转动副的单层三段导轨式平面机器人 | |
| CN115138965B (zh) | 一种面向航天航空领域的超大工作空间激光加工机器人 | |
| CN106671067A (zh) | 一种具有弧形移动副的三支链六自由度并联机构 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| WW01 | Invention patent application withdrawn after publication | ||
| WW01 | Invention patent application withdrawn after publication |
Application publication date: 20210430 |