发明内容
针对上述不足,本发明提供了一种基于三维数据的室内外融合方法,以三维模型自动标定编号的数据建立室内坐标系和室外坐标系,根据坐标系之间的编号关系,改用将室内外三维模型数据代替点云数据进行正确位置配准,并重新进行室内外数据的融合,统一匹配编号,消除因数据源不同而造成的数据不配套问题,实现室内外三维模型一体化精准显示。
本发明采用如下的技术方案:一种三维模型数据的室内外融合方法,该方法包括:
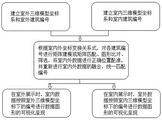
步骤1:建立室外三维模型坐标系和室外非建筑地理区块编号:构建外三维CityGML模型,获取任意选择的标准建筑基底靠南和靠西的边缘分别为X轴和Y轴其直角顶点为原点作为室外基准点O,建立室外三维模型坐标系E;获取室外每一非建筑地理区块的一个矩形面的四个顶点四个顶点坐标,且所述矩形面的四个顶点是该区块上的平行于XOY坐标平面的一个面积最大、且离XOY坐标平面距离最近的平面的四个点构成,并以四个顶点中离开O点距离最远的点N作为E下的每一非建筑地理区块的编号,并在室外三维CityGML模型中自动生成每一非建筑地理区块的编号,每一个编号对应于在E下的一个坐标;以编号点N点横坐标表示;建立编号库K;
步骤2:建立室内三维模型坐标系和室内建筑编号:通过室内软件图纸进行构建的室内三维CityGML模型,并按照每一栋建筑模型的基底与标准建筑基底一样构建每一栋建筑对应的室内三维模型坐标系I,获取室内每一建筑模型基底的一个矩形面的四个顶点坐标,且所述矩形面的四个顶点是该基底的平行于坐标系I的xoy坐标平面的一个面积最大、且离xoy坐标平面距离最近的平面的四个点构成,并以四个顶点中离开o点距离最远的点M’作为I下的每一栋建筑的编号点,并在室内三维CityGML模型中自动生成每一栋建筑的编号,每一个编号对应于在I下的一个坐标;以编号点M’点在I下的横坐标表示;建立编号库Q;
步骤3:室内外三维模型融合:建立坐标系E和I之间的变换式,采用各编号库的编号进行矩阵建模或矩阵匹配、图形比对、筛选,将室内外数据进行正确位置配准,并重新进行室内外数据的融合,统一匹配编号;
步骤4:室内外三维模型一体化呈现:根据模型的室外坐标系和室内坐标系之间的变换式,在室外展示时,室内数据按照E下的编号进行数据图形的可视化呈现,室内展示时,室外数据按照I下的编号进行动态图形化的可视化呈现,从而消除了因数据源不同而造成的数据不配套问题。
进一步地,步骤1中还包括采集室外图像数据。
进一步地,步骤1中是利用卫星、航空摄像等设备采集室外图像数据。
进一步地,步骤1中还包括对采集的室外图像数据进行数据处理,包括对室外图像数据进行匀色、去雾、纠正、去除坏线和条带、以及去除噪声。
进一步地,步骤1中还包括构建室外三维CityGML模型,根据处理好的室外图像数据在基于E下构建室外三维CityGML模型。优选地,采用室外软件图纸构建室外三维CityGML模型。
进一步地,步骤2中还包括采集室内图像数据。
进一步地,步骤2中是利用各类相机、监控设备、摄像设备或激光三维扫描仪等设备采集室内图像数据。
进一步地,步骤2中还包括对采集的室内图像数据进行数据处理,包括对室内图像数据进行去除清晰度较低的图像数据、图纸数据预处理、图纸数据清洗。
进一步地,步骤2中还包括构建室内三维CityGML模型,根据处理好的室内图像数据通过软件图纸在基于I下构建室内三维CityGML模型。
进一步地,步骤3中采用各数据的编号进行矩阵建模、图形比对、筛选,将室内外数据进行正确位置配准,并重新进行室内外数据的融合,统一匹配编号,包括:
S1将E下的区域中建筑物或建筑物群给予划分,形成多个子区域L,对于每一个子区域L的室内软件图纸分为训练集图纸和验证集图纸,每一个子区域的栋建筑按照从西往东,从北往南的顺序排列构建编号矩阵M=
,其中每一个矩阵元a
ij包括了每一个编号N;将每一个矩阵元a
ij对应的室内软件图纸作为矩阵元而构建图矩阵p=
,其中,不存在建筑之处用零矩阵元表示;
S2矩阵M和p之间通过生成对抗网络(GAN)训练并使用验证集图纸建立识别模型GAN(M)=p(1),
S3按照S1-S2同理在L和周围相邻L区域内建立识别模型GAN1(M1)=p(2),L和周围相邻L、次相邻区域内建立识别模型GAN2(M2)=p(3),依次扩大区域范围,直至扩展到E下全部区域,第q个识别模型GANq(Mq)=p(q+1),其中编号矩阵M中矩阵元至少有两个来自不同的子区域;
S4同理按照步骤S1-S3建立室外的q+1个识别模型GAN’(M’)=p(1’),GAN’1(M’1)=p(2’)... GAN’q(M’q)=p(q+1’),其中M'中的矩阵元为非建筑地理区块,包括道路、河流、山脉、森林、田地、湖泊等,但不包括任何子区域内部的非建筑地理区块,如小区内部的河道、道路、池塘、人工景观等;
S5选择编号库Q中至少一个编号代入(1),(2)...(q),分别得到图结果pR1,pR2...pRq,通过比对室内图像数据或软件图纸与pR1,pR2...pRq对比,筛选出相似度最高的室内图像数据或软件图纸pi1(如果一次选择多个编号,则对应多个pi1),根据关系式换算到E下进行正确位置配准;
S6选择编号库K中至少一个编号代入(1’),(2’)...(q’),分别得到图结果pR1’,pR2’...pRq’,通过比对室外图像数据或软件图纸与pR1’,pR2’...pRq’对比,筛选出相似度最高的室外图像数据或软件图纸pi2(如果一次选择多个编号,则对应多个pi2),根据关系式换算到任选一个步骤S5中位置配准的pi1相应I下进行正确位置配准;
S7重复S5和S6直到所有编号的建筑位置都完成配准;
S8 对于E下的室内图像数据或软件图纸都将I下的编号通过变换关系变换到E下的编号,对于I下的室外图像数据或软件图纸都将E下的编号通过变换关系变换到I下的编号。
其中,所述的根据关系式换算到E下进行正确位置配准包括,根据关系式将相应相似度最高的pi1对应的I下的编号点与E下的图像数据或软件图纸中对应的建筑模型的编号点相对齐,并且pi1与该建筑模型各自所在的横坐标轴重合而位置配准;而所述根据关系式换算到任选一个步骤S5中位置配准的pi1相应I下进行正确位置配准包括,根据关系式将相应相似度最高的pi2对应的E下编号点换算到位置配准的pi1相应I下,并且pi2与E下相应非建筑地理区块各自所在的横坐标轴重合。
在一个实施例中,采用各数据的编号进行矩阵匹配、图形比对、筛选,将室内外数据进行正确位置配准,包括步骤1,步骤2,且其中的四个顶点坐标分别按照顺时针横坐标编号,则对步骤S1中建立室内编号矩阵M和步骤S2中建立室外编号矩阵M’,其中每一个矩阵元包括了四个编号;还包括步骤S3':通过选择室内编号,对应编号矩阵M在E下的图像数据或软件图纸中的编号矩阵匹配,以及E下的图像数据或软件图纸与相应室内图像数据或软件图纸的图形比对,筛选出编号矩阵匹配和图形比对最吻合的配准位置得到所选择室内编号在E下的配准位置,建立相应I坐标系,S4'通过选择室外编号,对应编号矩阵M’与在配准位置的相应I下的图像数据或软件图纸中的编号矩阵匹配,以及相应I下的图像数据或软件图纸与相应室外图像数据或软件图纸的图形比对,再次筛选出数列编号矩阵匹配和图形比对最吻合的配准位置,得到所选择室外编号在配准位置的相应I下的配准位置; S5’重复上述步骤S3’和S4’直至室内编号和室外编号完全选择完毕完成配准,整个配准规程均由算法完成,按照图像相似百分比进行确认,当百分比大于95%以上时进行人工检核,否则再次进行比对,S6’对于E下的室内图像数据或软件图纸都将I下的编号通过变换关系变换到E下的编号,对于I下的室外图像数据或软件图纸都将E下的编号通过变换关系变换到I下的编号。
可以理解的是,上述矩阵建模或矩阵匹配两种技术方案,也可以是先通过在E下的所有室内建筑配准位置后,再考虑室外非建筑地理区块在已经配准位置的任选的一个或多个I下进行位置配准,从而完成整个室内外三维模型融合。然而不论何种配准位置方法,其中选择I的可以是与被配准的室外非建筑地理区块相近的I,即可以是被配准的室外非建筑地理区块的原点和I的原点最近的那个I。
以上所述的坐标系E和I为直角坐标系或非欧几何坐标系,所述的软件图纸包括CAD图纸或3dMAX图纸。步骤1中任意选择的标准建筑的基准点O也是其自身的I坐标系的原点o。
本发明还提供一种实现上述方法的装置,包括处理器、显示器、操作面板,其特征在于,所述装置还包括:
室外三维模型坐标系E和室外非建筑地理区块编号建立模块;
室内三维模型坐标系I和室内建筑编号建立模块;
室内外三维模型融合模块,用于建立坐标系E和I之间的变换式,采用各数据的编号进行矩阵建模或矩阵匹配、图形比对、筛选,将室内外数据进行正确位置配准,并重新进行室内外数据的融合,统一匹配编号;
室内外三维模型一体化呈现模块:根据模型的室外坐标系和室内坐标系之间的变换式,在室外展示时,室内数据按照E下的编号进行数据图形的可视化呈现,室内展示时,室外数据按照I下的编号进行动态图形化的可视化呈现。
所述装置包括了一种计算机可读非暂时性存储介质,其中存储有可由所述处理器运行而实现上述基于三维模型数据的室内外融方法方法的程序。
本发明具有如下有益效果:在室内外语义CityGML三维模型数据融合的时候,运用动态可视化模型融合展示的方法,消除了因数据源不同、坐标精度不同室内外场景无法融合的问题,且不需要进行室内室外数据坐标纠正来实现数据的完全匹配,大大的提高了作业人员的作业效率。并且语义CityGML三维模型建立基于软件图纸,其分辨率远远高于基于影像技术图像数据。
具体实施方式
下面将结合附图对本发明的技术方案进行清楚、完整的描述,显然,所描述的实施例是本发明的一部分实施例,不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
实施例1
一种三维模型数据的室内外融合方法,该方法包括:
步骤1:建立室外三维模型坐标系和室外非建筑地理区块编号。
根据地图场景相关信息,利用卫星、航空摄像等设备采集室外图像数据,例如通过无人机搭载摄影设备,摄影设备可以是普通的数码相机、全景数码相机、单镜头倾斜摄像相机、双镜头倾斜摄像相机、五镜头倾斜摄像相机等,从垂直、倾斜等不同角度采集图像,获取室外地面物体完整准确的信息。将采集到的室外图像数据通过有线网络或者无线网络发送给客户端,客户端接收室外图像数据,对接收的室外图像数据进行数据处理,数据处理包括:对室外图像数据进行影像匀色、影像去雾、影像纠正、去除坏线和条带、以及去除噪声,并根据处理好的室外图像数据构建室外三维CityGML模型。 获取市政大楼建筑基底靠南和靠西的边缘分别为X轴和Y轴其直角顶点为原点作为室外基准点O,建立室外三维模型坐标系E;获取室外每一非建筑地理区块的一个矩形面的四个顶点四个顶点坐标,且所述矩形面的四个顶点是该非建筑地理区块的平行于XOY坐标平面的一个面积最大、且离XOY坐标平面距离最近的平面的四个点构成,并以四个顶点中离开O点距离最远的点N作为E下的每一非建筑地理区块的编号,并在室外三维CityGML模型中自动生成每一非建筑地理区块的编号,每一个编号对应于在E下的一个坐标;以编号点N点横坐标表示;建立编号库K。
步骤2:建立室内三维模型坐标系和室内建筑编号。
根据地图场景相关信息,利用超宽带、各类感应器、监控设备或激光三维扫描仪等设备采集室内图像数据,将采集到的室内图像数据通过有线网络或者无线网络发送给客户端,客户端接收室内图像数据,对接收的室内图像数据进行数据处理,数据处理包括:去除室内图像中清晰度较低的图像数据、图纸数据预处理、图纸数据清洗,并根据处理好的室内图像数据通过CAD图纸构建室内三维CityGML模型。
通过CAD图纸进行构建的室内三维CityGML模型,并按照每一栋建筑模型的基底与标准建筑基地一样构建每一栋建筑对应的室内三维模型坐标系I,获取室内每一建筑模型基底的一个矩形面的四个顶点四个顶点坐标,且所述矩形面的四个顶点是该基底的平行于坐标系I的xoy坐标平面的一个面积最大、且离xoy坐标平面距离最近的平面的四个点构成,并以四个顶点中离开o点距离最远的点M’作为I下的每一栋建筑的编号,并在室内三维CityGML模型中自动生成每一栋建筑的编号,每一个编号对应于在I下的一个坐标;以编号点M’点在I下的横坐标表示;建立编号库Q。
步骤3:建立坐标系E和I之间的直角坐标系变换式,S1将E下的区域中建筑物或建筑物群给予划分,形成多个子区域L,对于一个小区子区域L的室内软件图纸分为训练集图纸和验证集图纸,该小区的栋建筑按照从西往东,从北往南的顺序排列构建编号矩阵M=
,其中每一个矩阵元a
ij包括了每一个编号N;将每一个矩阵元a
ij对应的室内软件图纸作为矩阵元而构建图矩阵p=
;
S2矩阵M和p之间通过生成对抗网络(GAN)训练并使用验证集图纸建立识别模型GAN(M)=p(1), S3按照S1-S2同理在L和周围相邻L区域M1=
内建立识别模型GAN1(M1)=p(2),L和周围相邻L、次相邻区域M2=
内建立识别模型GAN2(M2)=p(3),依次扩大区域范围,直至扩展到城市E下全部区域,第q个识别模型GANq(Mq)=p(q),其中编号矩阵M中矩阵元至少有两个来自不同的子区域,第一列零向量代表河道,其他零矩阵元表示小区内道路;
S4同理按照步骤S1-S3建立室外的q+1个识别模型GAN’(M’)=p(1’)(对应M’=
表示M以北的机动车道,四个顶点矩阵元表示车道表面的四个顶点),GAN’1(M’1)=p(2’)(对应M’1=(
,
f 11-
f 22表示M2东边的机动车道表面四个顶点,
g 11 f 22 g 21 g 22表示南边的绿化带在地面上的四个顶点,左上角0代表剩余区域的矩阵元都为零矩阵元... GAN’q’(M’q’)=p(q’);其中M'中的矩阵元为非建筑地理区块,包括小区外机动车道、非机动车道、人行道路、绿化带、草坪,但不包括任何子区域内部的小区内部的河道、道路、池塘、人工景观。
S5选择编号库Q中至少一个编号代入(1),(2)...(q),分别得到图结果pR1,pR2...pRq,通过比对室内图像数据或软件图纸与pR1,pR2...pRq对比,筛选出相似度最高的室内图像数据或软件图纸pi1,根据直角坐标系变换式换算到E下进行正确位置配准,直到编号库Q中编号选择且位置配准完毕;
S6选择编号库K中至少一个编号代入(1’),(2’)...(q’),分别得到图结果pR1’,pR2’...pRq’,通过比对室外图像数据或软件图纸与pR1’,pR2’...pRq’对比,筛选出相似度最高的室外图像数据或软件图纸pi2,根据直角坐标系变换式换算到任选一个步骤S5中编号配准的pi1相应I下进行正确位置配准;直到编号库K中编号选择且位置配准完毕。
步骤4:室内外三维模型一体化呈现:根据模型的室外坐标系和室内坐标系之间的变换式,在室外展示时,室内数据按照E下的编号进行数据图形的可视化呈现,室内展示时,室外数据按照I下的编号进行动态图形化的可视化呈现,从而消除了因数据源不同而造成的数据不配套问题。
实施例2
实施例2与实施例1的区别在于步骤3中采用各数据的编号进行矩阵匹配、图形比对、筛选,将室内外数据进行正确位置配准;步骤1,步骤2中的四个顶点坐标分别按照顺时针横坐标编号,则对步骤S1中建立室内编号矩阵M和步骤S2中建立室外编号M’,其中每一个矩阵元包括了四个编号;
还包括步骤S3':通过选择室内编号矩阵在E下的图像数据或CAD图纸中的编号矩阵匹配,以及E下的图像数据或CAD图纸与相应室内图像数据或CAD图纸的图形比对,筛选出编号矩阵匹配和图形比对最吻合的配准位置得到配准位置的相应I坐标系;即编号矩阵匹配的编号相差正好是E和I之间原点的距离,且误差在预设的阈值范围内,而图形比对则根据图像数据正视图或CAD正视图之间灰度化后两幅图作差,得到灰度差值图中的总灰度小于预设阈值时认定对比成功。
S4'通过选择室外编号矩阵在配准位置的相应I下的图像数据或CAD图纸中的编号矩阵匹配,以及相应I下的图像数据或CAD图纸与相应室外图像数据或CAD图纸的图形比对,再次筛选出数列编号矩阵匹配和图形比对最吻合的配准位置;S5’最后重复上述步骤S3’和S4’直至室内编号和室外编号完全选择完毕完成配准,
S6’对于E下的室内图像数据或软件图纸都将I下的编号通过变换关系变换到E下的编号,对于I下的室外图像数据或软件图纸都将E下的编号通过变换关系变换到I下的编号。
本发明的方法在室内外CityGML三维模型数据融合的时候,运用动态可视化模型融合展示的方法,消除了因数据源不同、坐标精度不同室内外场景无法融合的问题,且不需要进行室内室外数据坐标纠正来实现数据的完全匹配,相较于现有技术,大大提高了作业人员的作业效率。
以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的仅说明了本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入本发明要求保护的范围内。本发明的请求保护范围应以所附权利要求为准。