CN113802441B - 一种用于弯沉仪的斜坡自适应装置及其控制方法 - Google Patents
一种用于弯沉仪的斜坡自适应装置及其控制方法 Download PDFInfo
- Publication number
- CN113802441B CN113802441B CN202111183836.6A CN202111183836A CN113802441B CN 113802441 B CN113802441 B CN 113802441B CN 202111183836 A CN202111183836 A CN 202111183836A CN 113802441 B CN113802441 B CN 113802441B
- Authority
- CN
- China
- Prior art keywords
- weight
- gear
- barrel
- deflectometer
- weights
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 12
- 230000007246 mechanism Effects 0.000 claims abstract description 15
- 238000005096 rolling process Methods 0.000 claims abstract description 5
- 238000004891 communication Methods 0.000 claims abstract description 4
- 229920001971 elastomer Polymers 0.000 claims description 15
- 230000003044 adaptive effect Effects 0.000 claims description 8
- 238000001514 detection method Methods 0.000 claims description 5
- KXGFMDJXCMQABM-UHFFFAOYSA-N 2-methoxy-6-methylphenol Chemical compound [CH]OC1=CC=CC([CH])=C1O KXGFMDJXCMQABM-UHFFFAOYSA-N 0.000 claims description 3
- 239000000835 fiber Substances 0.000 claims description 3
- 229920001568 phenolic resin Polymers 0.000 claims description 3
- 239000005011 phenolic resin Substances 0.000 claims description 3
- 230000007547 defect Effects 0.000 abstract description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 239000004519 grease Substances 0.000 description 1
- 230000001050 lubricating effect Effects 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 210000002445 nipple Anatomy 0.000 description 1
- 230000001737 promoting effect Effects 0.000 description 1
Images




Classifications
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01C—CONSTRUCTION OF, OR SURFACES FOR, ROADS, SPORTS GROUNDS, OR THE LIKE; MACHINES OR AUXILIARY TOOLS FOR CONSTRUCTION OR REPAIR
- E01C23/00—Auxiliary devices or arrangements for constructing, repairing, reconditioning, or taking-up road or like surfaces
- E01C23/01—Devices or auxiliary means for setting-out or checking the configuration of new surfacing, e.g. templates, screed or reference line supports; Applications of apparatus for measuring, indicating, or recording the surface configuration of existing surfacing, e.g. profilographs
Landscapes
- Engineering & Computer Science (AREA)
- Architecture (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Road Repair (AREA)
- One-Way And Automatic Clutches, And Combinations Of Different Clutches (AREA)
Abstract
本发明公开了一种用于弯沉仪的斜坡自适应装置,包括筒体,筒体内安装有砝码,筒体顶部安装有用于提升砝码的液压提升机构,筒体的内侧壁沿着筒体的轴向安装有若干个导向轮,砝码上设置有与导向轮滚动卡接的导向槽,导向轮对向的筒体内侧壁沿着筒体的轴向安装有若干个齿轮,砝码上设置有与齿轮啮合的齿条,每个齿轮连接有一个编码器,每个齿轮通过离合器连接有一个伺服电机,控制器分别与液压提升机构、编码器和伺服电机通讯连接。本发明能够改进现有技术的不足,便于在砝码处于倾斜状态下精确控制载荷。
Description
技术领域
本发明涉及路面检测技术领域,尤其是一种用于弯沉仪的斜坡自适应装置及其控制方法。
背景技术
弯沉仪是一种用于测量路面收到冲击力载荷后形变量的仪器。其中落锤式弯沉仪是通过砝码的自由落体运动来实现载荷加载。传统的落锤式弯沉仪一直保持砝码的垂直向下运动方向,当路面存在倾斜角度时,根据实际检测需求,需要测量载荷垂直加载于路面的状态下路面的形变量,这时如果仅仅简单将砝码的运动方向改变成垂直于路面,由于砝码运动状态的改变,会导致施加在路面上的载荷出现变化,从而产生测量误差。
发明内容
本发明要解决的技术问题是提供一种用于弯沉仪的斜坡自适应装置及其控制方法,能够解决现有技术的不足,便于在砝码处于倾斜状态下精确控制载荷。
为解决上述技术问题,本发明所采取的技术方案如下。
一种用于弯沉仪的斜坡自适应装置,包括筒体,筒体内安装有砝码,筒体顶部安装有用于提升砝码的液压提升机构,筒体的内侧壁沿着筒体的轴向安装有若干个导向轮,砝码上设置有与导向轮滚动卡接的导向槽,导向轮对向的筒体内侧壁沿着筒体的轴向安装有若干个齿轮,砝码上设置有与齿轮啮合的齿条,每个齿轮连接有一个编码器,每个齿轮通过离合器连接有一个伺服电机,控制器分别与液压提升机构、编码器和伺服电机通讯连接。
作为优选,所述导向槽中间设置有安装槽,安装槽底部设置有若干个弹簧安装孔,安装槽内设置有橡胶条,橡胶条的底面设置有与弹簧安装孔一一对应的弹簧卡槽,弹簧一端卡接在弹簧卡槽中,弹簧另一端卡接在弹簧安装孔中,导向轮上设置有与橡胶条相接触的环形部。
作为优选,所述导向轮的两侧设置有储油槽,储油槽靠近导向轮外侧的一端固定有酚醛树脂纤维滤芯。
作为优选,所述齿条上均匀设置有若干个齿谷,齿谷顶部的两侧固定有橡胶斜面部,齿谷底部设置有弧面部。
一种上述所述的用于弯沉仪的斜坡自适应装置的控制方法,=包括以下步骤:
A、根据路面的倾斜角度和路面检测需要的冲击力大小计算砝码的重量,选择对应重量的砝码安装在筒体内;
B、液压提升机构将砝码提升至筒体顶部,当接收到控制器的启动指令后,液压提升机构释放砝码,砝码沿着导向轮向下滑动;
C、齿轮在砝码的带动下转动,控制器通过编码器对砝码的实时速度进行检测;
D、将砝码的实时速度与对应的预设速度进行比对,当实时速度小于预设速度时,控制器控制对应的离合器结合,同时启动对应的伺服电机驱动齿轮对砝码进行加速。
作为优选,步骤D中,当需要结合离合器时,在砝码未接触对应齿轮时将离合器结合,并根据砝码的实时速度使用伺服电机对齿轮的转速进行预加载。
作为优选,步骤D中,与砝码接触的齿轮中,至少有一个齿轮对应的离合器处于断开状态。
作为优选,步骤D中,控制器采用PID算法对伺服电机进行闭环控制。
采用上述技术方案所带来的有益效果在于:本发明通过安装导向轮,将砝码与筒体的滑动摩擦改为砝码与导向轮的滚动摩擦,大大降低了倾斜状态下砝码下落过程中的摩擦力。同时利用齿轮机构对砝码的下落速度进行实时监控和调节,从而保证砝码下落载荷与预设载荷相等。导向槽内的橡胶条用来提高导向轮和导向槽之间的滑动摩擦力,从而避免导向轮在导向槽内滚动过程中,与导向槽之间发生滑动。橡胶条的安装结构可根据砝码重量、下落速度以及倾斜角度,快速更换不同硬度和厚度的橡胶条以及不同长度和弹性系数的弹簧。储油槽用来容纳润滑脂,从而实现导向轮侧面与导向槽接触面的润滑。专门优化结构的齿谷可以减少齿轮啮合过程中的冲击力,从而进一步提高砝码在导向轮上运动的平稳度。
附图说明
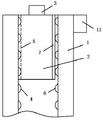
图1是本发明一个具体实施方式的结构图。
图2是本发明一个具体实施方式中齿轮驱动结构图。
图3是本发明一个具体实施方式中导向槽的结构图。
图4是本发明一个具体实施方式中导向轮的结构图。
图5是本发明一个具体实施方式中齿条的结构图。
具体实施方式
参照图1-5,本发明一个具体实施方式包括筒体1,筒体1内安装有砝码2,筒体1顶部安装有用于提升砝码2的液压提升机构3,筒体1的内侧壁沿着筒体1的轴向安装有若干个导向轮4,砝码2上设置有与导向轮4滚动卡接的导向槽5,导向轮4对向的筒体1内侧壁沿着筒体1的轴向安装有若干个齿轮6,砝码2上设置有与齿轮6啮合的齿条7,每个齿轮6连接有一个编码器8,每个齿轮6通过离合器9连接有一个伺服电机10,控制器11分别与液压提升机构3、编码器8和伺服电机10通讯连接。导向槽5中间设置有安装槽12,安装槽12底部设置有若干个弹簧安装孔13,安装槽12内设置有橡胶条14,橡胶条14的底面设置有与弹簧安装孔13一一对应的弹簧卡槽15,弹簧16一端卡接在弹簧卡槽15中,弹簧16另一端卡接在弹簧安装孔13中,导向轮4上设置有与橡胶条14相接触的环形部17。导向轮4的两侧设置有储油槽18,储油槽18靠近导向轮4外侧的一端固定有酚醛树脂纤维滤芯19。齿条7上均匀设置有若干个齿谷20,齿谷20顶部的两侧固定有橡胶斜面部21,齿谷20底部设置有弧面部22。
一种上述所述的用于弯沉仪的斜坡自适应装置的控制方法,包括以下步骤:
A、根据路面的倾斜角度和路面检测需要的冲击力大小计算砝码2的重量,选择对应重量的砝码2安装在筒体1内;
B、液压提升机构3将砝码2提升至筒体1顶部,当接收到控制器11的启动指令后,液压提升机构3释放砝码2,砝码2沿着导向轮4向下滑动;
C、齿轮6在砝码2的带动下转动,控制器11通过编码器8对砝码2的实时速度进行检测;
D、将砝码的实时速度与对应的预设速度进行比对,当实时速度小于预设速度时,控制器11控制对应的离合器9结合,同时启动对应的伺服电机10驱动齿轮6对砝码2进行加速。
步骤D中,当需要结合离合器9时,在砝码2未接触对应齿轮6时将离合器9结合,并根据砝码2的实时速度使用伺服电机10对齿轮6的转速进行预加载。与砝码2接触的齿轮6中,至少有一个齿轮6对应的离合器9处于断开状态。控制器11采用PID算法对伺服电机10进行闭环控制。
在本发明的描述中,需要理解的是,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
Claims (7)
1.一种用于弯沉仪的斜坡自适应装置,其特征在于:包括筒体(1),筒体(1)内安装有砝码(2),筒体(1)顶部安装有用于提升砝码(2)的液压提升机构(3),筒体(1)的内侧壁沿着筒体(1)的轴向安装有若干个导向轮(4),砝码(2)上设置有与导向轮(4)滚动卡接的导向槽(5),导向轮(4)对向的筒体(1)内侧壁沿着筒体(1)的轴向安装有若干个齿轮(6),砝码(2)上设置有与齿轮(6)啮合的齿条(7),每个齿轮(6)连接有一个编码器(8),每个齿轮(6)通过离合器(9)连接有一个伺服电机(10),控制器(11)分别与液压提升机构(3)、编码器(8)和伺服电机(10)通讯连接;导向槽(5)中间设置有安装槽(12),安装槽(12)底部设置有若干个弹簧安装孔(13),安装槽(12)内设置有橡胶条(14),橡胶条(14)的底面设置有与弹簧安装孔(13)一一对应的弹簧卡槽(15),弹簧(16)一端卡接在弹簧卡槽(15)中,弹簧(16)另一端卡接在弹簧安装孔(13)中,导向轮(4)上设置有与橡胶条(14)相接触的环形部(17)。
2.根据权利要求1所述的用于弯沉仪的斜坡自适应装置,其特征在于:所述导向轮(4)的两侧设置有储油槽(18),储油槽(18)靠近导向轮(4)外侧的一端固定有酚醛树脂纤维滤芯(19)。
3.根据权利要求1所述的用于弯沉仪的斜坡自适应装置,其特征在于:所述齿条(7)上均匀设置有若干个齿谷(20),齿谷(20)顶部的两侧固定有橡胶斜面部(21),齿谷(20)底部设置有弧面部(22)。
4.一种权利要求1-3任意一项所述的用于弯沉仪的斜坡自适应装置的控制方法,其特征在于包括以下步骤:
A、根据路面的倾斜角度和路面检测需要的冲击力大小计算砝码(2)的重量,选择对应重量的砝码(2)安装在筒体(1)内;
B、液压提升机构(3)将砝码(2)提升至筒体(1)顶部,当接收到控制器(11)的启动指令后,液压提升机构(3)释放砝码(2),砝码(2)沿着导向轮(4)向下滑动;
C、齿轮(6)在砝码(2)的带动下转动,控制器(11)通过编码器(8)对砝码(2)的实时速度进行检测;
D、将砝码的实时速度与对应的预设速度进行比对,当实时速度小于预设速度时,控制器(11)控制对应的离合器(9)结合,同时启动对应的伺服电机(10)驱动齿轮(6)对砝码(2)进行加速。
5.根据权利要求4所述的用于弯沉仪的斜坡自适应装置的控制方法,其特征在于:步骤D中,当需要结合离合器(9)时,在砝码(2)未接触对应齿轮(6)时将离合器(9)结合,并根据砝码(2)的实时速度使用伺服电机(10)对齿轮(6)的转速进行预加载。
6.根据权利要求5所述的用于弯沉仪的斜坡自适应装置的控制方法,其特征在于:步骤D中,与砝码(2)接触的齿轮(6)中,至少有一个齿轮(6)对应的离合器(9)处于断开状态。
7.根据权利要求4所述的用于弯沉仪的斜坡自适应装置的控制方法,其特征在于:步骤D中,控制器(11)采用PID算法对伺服电机(10)进行闭环控制。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111183836.6A CN113802441B (zh) | 2021-10-11 | 2021-10-11 | 一种用于弯沉仪的斜坡自适应装置及其控制方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111183836.6A CN113802441B (zh) | 2021-10-11 | 2021-10-11 | 一种用于弯沉仪的斜坡自适应装置及其控制方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN113802441A CN113802441A (zh) | 2021-12-17 |
| CN113802441B true CN113802441B (zh) | 2022-12-09 |
Family
ID=78939287
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202111183836.6A Active CN113802441B (zh) | 2021-10-11 | 2021-10-11 | 一种用于弯沉仪的斜坡自适应装置及其控制方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113802441B (zh) |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN208795589U (zh) * | 2018-08-15 | 2019-04-26 | 尹承尧 | 一种建筑工程监理用检测装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ES2940455T3 (es) * | 2015-12-16 | 2023-05-08 | Dynatest As | Deflectómetro de impacto |
| KR20170116800A (ko) * | 2016-04-12 | 2017-10-20 | 성균관대학교산학협력단 | 비틀림 시험장치 |
| CN107144308B (zh) * | 2017-07-07 | 2024-02-13 | 宁波如意股份有限公司 | 一种位移和速度检测装置及其检测方法 |
| CN207775675U (zh) * | 2017-12-19 | 2018-08-28 | 武昌理工学院 | 一种路基路面弯沉检测装置 |
| CN208917650U (zh) * | 2018-08-07 | 2019-05-31 | 云南省建设工程质量检测中心有限公司 | 一种智能化路面弯沉仪 |
| CN209387431U (zh) * | 2018-12-23 | 2019-09-13 | 北京今谷神箭测控技术研究所 | 车载落锤式弯沉仪 |
| CN210014976U (zh) * | 2019-05-20 | 2020-02-04 | 四川正达检测技术有限责任公司 | 落锤式弯沉仪自动对点器 |
-
2021
- 2021-10-11 CN CN202111183836.6A patent/CN113802441B/zh active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN208795589U (zh) * | 2018-08-15 | 2019-04-26 | 尹承尧 | 一种建筑工程监理用检测装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113802441A (zh) | 2021-12-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN203266068U (zh) | 汽车座椅卡簧压装设备 | |
| CN112476483B (zh) | 一种用于机器人的润滑系统及方法 | |
| CN108086654A (zh) | 一种基于物联网的具有修补功能的打磨效果好的刷墙机 | |
| CN113802441B (zh) | 一种用于弯沉仪的斜坡自适应装置及其控制方法 | |
| CN116062453B (zh) | 一种汽车刹车盘加工转运装置 | |
| CN108033274B (zh) | 一种自动码簧装置 | |
| CN114802333B (zh) | 一种输送车的轮组结构及具有该轮组结构的输送车 | |
| CN210293706U (zh) | 一种高精度车辆对中装置 | |
| CN111256017B (zh) | 一种新型桁架机械手的定点润滑装置 | |
| CN114608409A (zh) | 轨道交通用联轴器外齿公法线检测装置及检测方法 | |
| CN112692132A (zh) | 电池顶升组件及电池钢壳槽口成型机构 | |
| CN111395200B (zh) | 一种利用齿轮传动的桥梁顶推组件 | |
| CN217800460U (zh) | 一种机床用长丝杠防弯装置 | |
| CN113070715A (zh) | 一种数控移动平台精度调节方案及其调节方法 | |
| CN117824466A (zh) | 一种铁路轴承游隙检测装置以及检测方法 | |
| CN217143919U (zh) | 一种工业机器人负载机械臂 | |
| CN112362017B (zh) | 一种定心测量机构及其车轮自动测量机 | |
| CN117533188A (zh) | 一种应用于底盘式商用车换电站的自动换电系统 | |
| CN112873274B (zh) | 一种基于深度视觉的机器人抓取系统及其使用方法 | |
| CN218267172U (zh) | 齿轮转移及注油机构 | |
| CN113927050A (zh) | 一种全电动固定式不落轮车轮车床 | |
| CN220770786U (zh) | 一种动力总成装配线的机油加注变位机构 | |
| CN208196774U (zh) | 行星七轴机器人 | |
| CN222267689U (zh) | 一种单臂热熔胶机滑行驱动装置 | |
| CN221363675U (zh) | 一种数控机床导轨润滑装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |