CN116106931A - 一种涉水预警的方法及相关装置 - Google Patents
一种涉水预警的方法及相关装置 Download PDFInfo
- Publication number
- CN116106931A CN116106931A CN202111320824.3A CN202111320824A CN116106931A CN 116106931 A CN116106931 A CN 116106931A CN 202111320824 A CN202111320824 A CN 202111320824A CN 116106931 A CN116106931 A CN 116106931A
- Authority
- CN
- China
- Prior art keywords
- water
- depth
- water accumulation
- wading
- coordinate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/93—Lidar systems specially adapted for specific applications for anti-collision purposes
- G01S17/931—Lidar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/10—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration
- G01C21/12—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning
- G01C21/16—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation
- G01C21/165—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation combined with non-inertial navigation instruments
- G01C21/1652—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation combined with non-inertial navigation instruments with ranging devices, e.g. LIDAR or RADAR
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/10—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration
- G01C21/12—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning
- G01C21/16—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation
- G01C21/165—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation combined with non-inertial navigation instruments
- G01C21/1656—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation combined with non-inertial navigation instruments with passive imaging devices, e.g. cameras
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/93—Sonar systems specially adapted for specific applications for anti-collision purposes
- G01S15/931—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/80—Analysis of captured images to determine intrinsic or extrinsic camera parameters, i.e. camera calibration
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Electromagnetism (AREA)
- Automation & Control Theory (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Theoretical Computer Science (AREA)
- Acoustics & Sound (AREA)
- Measurement Of Optical Distance (AREA)
Abstract
本申请实施例提供一种涉水预警的方法和装置,涉及智能驾驶技术领域,用于获取积水区域的积水信息。该涉水预警的方法包括:获取积水区域的光学图像和深度图像,该光学图像和该深度图像分别是由已标定的光学测距仪和声学测距仪所获得;基于该光学图像和该深度图像,确定该积水区域的最大积水深度;判断该最大积水深度是否大于安全涉水深度;若该最大积水深度大于该安全涉水深度,发出预警提示信息。由于采用光学测距仪和声学测距仪,能够让车体在不进入积水区域的情况下,获取积水区域的积水信息,使得驾驶策略更加安全且高效。
Description
技术领域
本申请涉及智能驾驶技术领域,尤其涉及一种涉水预警的方法及其相关设备。
背景技术
在降雨天气下,在车道上可能存在大量的积水,车主在无法预知前方道路的积水深度的情况下,驾驶车辆在积水道路上存在极大的安全隐患。
在现有的技术方案中,主要有以下两类方案用于检测前方道路的积水深度。
在一种现有的技术方案中,将测量水深的检测装置安装在车辆的底部,只有当该检测装置进入水面时才能够测量当前的涉水深度;然而当该车辆得知前方区域的积水深度时,该车辆可能已经进入较深的水洼、导致熄火事故发生、影响车辆行驶的安全性;
在另一种现有的技术方案中,采用车联网系统中的实时信息传递技术,实现人、车与道路基建互相协调配合。例如,提前在路面或者路面以下安装测量水深的传感器,当车辆到达附近区域时,通过网络将前方积水路面的涉水深度信息实时传输至所述车辆,达到预警的目的。然而,该方案成本过高,导致应用范围受限。
发明内容
本申请提供一种涉水预警方法,很好地解决了在车体不进入积水区域的情况下,获取前方预设距离内积水区域的最大积水深度。为达到上述目的,本申请提供如下技术方案:
第一方面,本申请提供了一种涉水预警方法,该涉水预警方法包括以下步骤:
获取积水区域的光学图像和深度图像,该光学图像和该深度图像分别是由已标定的光学测距仪和声学测距仪所获得;
基于该光学图像和该深度图像,确定该积水区域的最大积水深度;
判断该最大积水深度是否大于安全涉水深度;
若该最大积水深度大于该安全涉水深度,发出预警提示信息。
由于传统方法需要在车体部分进入积水区域的情况下才能获取前方积水区域的积水深度,该方法在得知积水深度时,已经。本申请采用通过光学测距仪和深度测距仪确定积水区域的三维坐标信息的方式确定积水区域的最大积水深度,可以做到更加安全高效,为驾驶员提供更多的驾驶决策时间。
对光学测距仪和声学测距仪进行标定,能够将两个测距仪变换到统一的世界坐标系中,以保证测量值的准确性;同时,车辆在行驶过程中,由于震动等原因,会导致测距仪位置与原位置产生偏移,因此将对光学测距仪和声学测距仪进行标定,可以更精确地获取积水区域的三维坐标信息。
在一种可能实现方式中,基于该积水区域的光学图像和深度图像,确定积水区域的三维坐标信息包括:
基于该光学图像和该深度图像,确定该积水区域的三维坐标信息;
基于该积水区域的三维坐标信息,得到积水区域的最大积水深度。
光学图像可以很好的反映积水区域的水面像素点的三维坐标信息,而深度图像可以穿透过积水区域的水面,获取路面像素点的三维坐标信息。通过水面像素点和路面像素点,即可得到积水区域的最大即使深度。
在一种可能实现方式中,基于该光学图像和该深度图像,确定该积水区域的三维坐标信息包括:
基于该光学图像,确定水面像素点坐标集合,记为T={(X1t,Y1t,Z1t)…(Xit,Yit,Zit)};
基于该深度图像,确定路面像素点坐标集合,记为D={(X1d,Y1d,Z1d)…(Xjd,Yjd,Zjd)};
该积水区域的三维坐标信息包括该水面像素点坐标集合和该路面像素点坐标集合,该三维坐标为包含X轴、Y轴和Z轴的坐标系,其中,该水面像素点坐标集合内的坐标与该路面像素点坐标集合内的坐标具有一一对应关系,该一一对应关系用于指示该水面像素点和该路面像素点在该三维坐标系中X和Y坐标值相同,Z坐标值不同。
在一种可能实现方法中,基于该积水区域的三维坐标信息,得到积水区域的最大积水深度包括:
将两个分别来自于该水面像素点坐标集合T和该路面像素点坐标集合D中具有该一一对应关系的坐标点相减,得到坐标差值集合K={(0,0,ΔZ1)…(0,0,ΔZk)};
根据该坐标差值集合K,确定该最大积水深度,其中,该最大积水深度为该坐标差值集合K中Z坐标的最大值。
在一种可能实现方法中,该方法还包括:
基于该积水区域的光学图像,确定位于积水边缘的像素点的空间坐标集合F={(X1f,Y1f,Z1f)…(Xif,Yif,Zif)};
根据该空间坐标集合F确定最大积水宽度、最大涉水距离或积水面积中的至少一个该涉水信息。
在一种可能实现方法中,该预警提示信息包括视觉预警,声音预警、灯光预警、文本预警等中的一种或者多种预警的结合。
在一种可能实现方法中,该视觉预警包括具有可视化效果的积水面积,积水宽度,积水深度中的至少一项或者多项的结合。
第二方面,本申请实施例还提供了一种涉水预警装置,包括:
感知模块,用于获取积水区域的光学图像和深度图像,该光学图像和该深度图像分别是由已标定的光学测距仪和声学测距仪所获得;
处理模块,用于基于该光学图像和该深度图像,确定该积水区域的最大积水深度;
判断模块,用于判断该最大积水深度是否大于安全涉水深度;
预警模块,若该最大积水深度大于该安全涉水深度,用于发出预警提示信息。
第三方面,本申请实施例还提供了一种涉水预警装置,包括:
至少一个处理器;
至少一个存储器,存储有计算机程序,当计算机程序被处理器执行时,实现如第一方面中的任意一项图像处理方法。
第四方面,本申请实施例提供一种计算机程序产品,该计算机程序产品包括:计算机程序代码,当该计算机程序代码运行时,使得处理器执行第一方面的任意一种方法。
第五方面,本申请实施例提供一种车辆,该车辆包括行进系统、传感系统、控制系统和计算机系统,其中,该计算机系统用于执行第一方面的任意一项方法。
附图说明
图1为本申请实施例提供的车辆100的一个功能框示意图;
图2为本申请实施例提供的涉水预警的流程示意图;
图3为本申请实施例提供的另一种涉水预警的流程示意图;
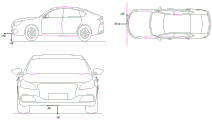
图4为本申请实施例提供的一种可能的测距仪安装位置示意图;
图5为本申请实施例提供的一种车体坐标系的示意图;
图6a为本申请实施例提供的水面像素点和路面像素点对应关系示意图;
图6b为本申请实施例提供的一种计算积水深度的示意图;
图7为本申请实施例提供的一种视觉预警示意图;
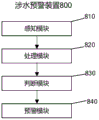
图8为本申请实施例提供的一种涉水预警装置的结构示意图;
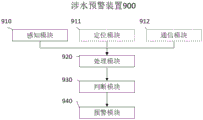
图9为本申请实施例提供的另一种涉水预警装置的结构示意图;
图10为本申请实施例提供的一种涉水预警装置的硬件结构示意图。
具体实施方式
下面结合本发明实施例中的附图本发明实施例进行描述。本发明的实施方式部分使用的术语仅用于对本发明的具体实施例进行解释,而非旨在限定本发明。
下面结合附图,对本申请的实施例进行描述。本领域普通技术人员可知,随着技术的发展和新场景的出现,本申请实施例提供的技术方案对于类似的技术问题,同样适用。
本申请的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的术语在适当情况下可以互换,这仅仅是描述本申请的实施例中对相同属性的对象在描述时所采用的区分方式。此外,术语“包括”和“具有”以及他们的任何变形,其目的在于覆盖不排他的包含,以便包含一系列单元的过程、方法、系统、产品或设备不必限于那些单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它单元。
本申请实施例提供了一种涉水预警方法及其相关装置,能够在车辆不进入积水区域的情况下,获得前方预设距离内积水区域的信息,为驾驶员留出足够的行车反应时间,并为驾驶员接下来的行驶决策提供依据。该涉水预警方法及其相关装置也可以为自动驾驶提供判断信息。在自动驾驶的路径规划中,为了使驾驶策略更加安全且高效,车辆需要在基于积水区域的信息上进行决策,例如避让积水区域或通过积水区域,从而使车辆沿最优的轨迹行驶。
该车辆表示为在车道上行驶的机动车。在本申请实施例中,仅以车辆为例对本申请实施例进行解释说明,但本申请实施例并不限定为在车道上行驶的机动车。例如,也可以是头戴式设备、智能终端或机器人等等,在此处不做限定。同理,本申请实施例中的车道并不限定为交通场景下,也可以是非交通场景下,如在园区内物流机器人配送货物的场景;或者是在野外,用户装备头戴式设备的场景。
下面对本申请实施例中出现的一些专业术语进行解释:
光学图像:又称为模拟图像(analog images),是指灰度和颜色连续变化的图像。通常,光学图像是采用光学摄影系统获取的以感光胶片为介质的图像。例如,可见光黑白或全色像片、彩色红外像片、多波段摄影像片和热红外摄影像片,都属于光学图像。
涉水深度:即安全最大涉水深度,指的是在安全行驶条件下,即在不对运动主体造成损伤的情况下,该运动主题能涉水通过的最大深度。以车辆为例,安全水深可以是排气口离地高度、车轮半高触地距离、门框离地高度、发动机进气口离地高度其中之一。型号不同的车辆的安全涉水深度会有所不同。
标定:在已知标定控制点的世界坐标系和像素坐标系下,建立世界坐标系到像素坐标系的映射关系。得到该映射关系后,用户可以由特定点的像素坐标系反推该特定点的世界坐标系,用户可以根据该世界坐标系进行测量操作。在本申请实施例中,将光学测距仪和声学测距仪进行标定处理,使得两个测距仪所获取的2D彩色图像和3D深度图像统一在同一个坐标系下,即在已知某个积水区域的像素点坐标的情况下,可以得到该积水区域在世界坐标系中的位置。值得一提的是,将世界坐标系替换为任意一个反映车体和周围环境的三维空间关系的坐标系,例如车体坐标系,也能达到本申请实施例的技术效果。
视觉预警:以车辆为例,当车辆的前方预设距离内出现积水区域时,视觉预警将积水信息包括最大积水深度、最大积水宽度、最大积水长度或积水面积中的至少一项,通过中控显示屏、抬头显示(HeadupDisplay)或仪表盘显示之一对用户进行提示。
世界坐标系:反映了物体在客观三维世界的绝对坐标系,也称作客观坐标系,是一个三维直角坐标系,单位为长度单位。以汽车为例,该坐标系的原点可以在车头中心点位置,X轴、Y轴和Z轴三者互相垂直,其中X轴水平向右与路面平行,Y轴指向行驶方向,Z轴指向路面。坐标系中的点,可以用(Xt,Yt,Zt)表示,单位为米。
车体坐标系:用于描述车辆周边环境与车辆关系的坐标系,也可以称为整车坐标或自车坐标系。有的以重心作为原点,其延伸出来的右手坐标系即为车体坐标系,以imu为定义的车体坐标系则是以imu位置为原点。也可以对根据不同的场景需求,对原点的位置进行自定义。
图像坐标系:图像坐标系也可称为光学图像坐标系,坐标原点为图像平面的左上角顶点,X轴和Y轴分别平行于图像物理坐标系的X轴和Y轴。图像像素坐标系中的点,用(u,v)表示。像素坐标系就是以像素为单位的图像坐标系。
点云坐标系:以激光雷达为例。多线激光雷达基本上可以看做是将多个激光雷达按一定角度绑在一起,并且不停旋转的高速激光测距仪。该激光雷达在垂直方向上可以几乎同时在多个方向上发射激光。根据反射回的激光在空中的飞行时间(TOF,time of fly)就可以计算出激光雷达距离物体表面的距离。该多束垂直分布的激光,随上部机体一起旋转,从而完成对环境360度的扫描。大量的数据点绘制在3维空间中,形成了云状分布,被称为激光点云(Point Cloud),每个激光点云的坐标可以用(Xd,Yd,Zd)表示。
图1是本申请实施例提供的车辆100的一个功能框图示意。可以将车辆100配置为完全或部分自动驾驶模式。例如:车辆100可以通过感知系统120获取其周围的环境信息,并基于对周边环境信息的分析得到自动驾驶策略以实现完全自动驾驶,或者将分析结果呈现给用户以实现部分自动驾驶。
车辆100可包括各种子系统,例如信息系统110、感知系统120、决策控制系统130、驱动系统140、计算平台150以及电源160。可选地,车辆100可包括更多或更少的子系统,并且每个子系统都可包括多个部件。另外,车辆100的每个子系统和部件可以通过有线或者无线的方式实现互连。
在一些实施例中,信息系统110可以包括通信系统111、触摸屏112、麦克风113、扬声器114以及导航系统115。
通信系统111可以包括无线通信系统,无线通信系统可以直接地或者经由通信网络来与一个或多个设备无线通信。例如,无线通信系统可使用3G蜂窝通信,例如CDMA、EVD0、GSM/GPRS,或者4G蜂窝通信,例如LTE。或者5G蜂窝通信。无线通信系统可利用WiFi与无线局域网(wireless local area network,WLAN)通信。在一些实施例中,无线通信系统可利用红外链路、蓝牙或ZigBee与设备直接通信。其他无线协议,例如各种车辆通信系统,例如,无线通信系统可包括一个或多个专用短程通信(dedicated short range communications,DSRC)设备,这些设备可包括车辆和/或路边台站之间的公共和/或私有数据通信。
触摸屏112、麦克风113和扬声器114可以组成娱乐系统,用户可以基于娱乐系统在车内收听广播,播放音乐;或者将手机和车辆联通,在触摸屏上实现手机的投屏。在一些情况下,可以通过麦克风获取用户的语音信号,并依据对用户的语音信号的分析实现用户对车辆100的某些控制,例如调节车内温度等。在另一些情况下,可以通过音响向用户播放音乐。在本申请实施例中,预警模块所发出的前方预设距离内的积水信息可以通过触摸屏112、麦克风113和扬声器114反馈给用户。
导航系统115可以包括由地图供应商所提供的地图服务,从而为车辆100提供行驶路线的导航,导航系统115可以和车辆的全球定位系统121、惯性测量单元122配合使用。地图供应商所提供的地图服务可以为二维地图,也可以是高精地图。
感知系统120可包括感测关于车辆100周边的环境的信息的若干种传感器。例如,感知系统120可包括全球定位系统121(全球定位系统可以是GPS系统,也可以是北斗系统或者其他定位系统)、惯性测量单元(inertial measurement unit,IMU)122、激光雷达123、毫米波雷达124、超声雷达125、摄像装置126以及测距仪127,其中,摄像装置126也可以称作摄像头。感知系统120还可包括被监视车辆100的内部系统的传感器(例如,车内空气质量监测器、燃油量表、机油温度表等)。来自这些传感器中的一个或多个的传感器数据可用于检测对象及其相应特性(位置、形状、方向、速度等)。这种检测和识别是车辆100的安全操作的关键功能。在本申请实施例中,光学测距仪为摄像装置126,声学测距仪为声学测距仪127
全球定位系统121可用于估计车辆100的地理位置。
惯性测量单元122用于基于惯性加速度来感测车辆100的位置和朝向变化。在一些实施例中,惯性测量单元122可以是加速度计和陀螺仪的组合。
激光雷达123可利用激光来感测车辆100所位于的环境中的物体。在一些实施例中,激光雷达123可包括一个或多个激光源、激光扫描器以及一个或多个检测器,以及其他系统组件。
毫米波雷达124可利用无线电信号来感测车辆100的周边环境内的物体。在一些实施例中,除了感测物体以外,雷达126还可用于感测物体的速度和/或前进方向。
超声雷达125可以利用超声波信号来感测车辆100周围的物体。
摄像装置126可用于捕捉车辆100的周边环境的图像信息。摄像装置126可以包括单目相机、双目相机、结构光相机以及全景相机等,摄像装置126获取的图像信息可以包括静态图像,也可以包括视频流信息。在本申请实施例中,摄像装置126为光学测距仪,用于获取前方预设距离内的积水区域的彩色图像。
测距仪127用于测量距离。测距仪可以包括激光测距仪、超声波测距仪、以及红外测距仪等。在本申请实施例中,测距仪127以超声波测距仪为例,超声波测距原理是利用超声波在空气中的传播速度为已知,测量超声波在遇到障碍物后反射回来的时间差,计算发射点到该障碍物的实际距离。值注意的是,超声波的速度与温度有关,如果温度变化不大,则可以认为超声波的速度是不变的。如果温度变化很大,则可以通过温度补偿的方法加以校正。
通过感知系统120中部署的传感器可以获取深度图像和彩色图像,比如,通过激光雷达123和摄像装置126分别获取同一个场景下的深度图像和彩色图像。
决策控制系统130包括基于感知系统120所获取的信息进行分析决策的计算系统131,决策控制系统130还包括对车辆100的动力系统进行控制的整车控制器132,以及用于控制车辆100的转向系统133、油门134和制动系统135。
计算系统131可以操作来处理和分析由感知系统120所获取的各种信息以便识别车辆100周边环境中的目标、物体和/或特征。该目标可以包括行人或者动物,该物体和/或特征可包括交通信号、道路边界和障碍物。计算系统131可使用物体识别算法、运动中恢复结构(Structure from Motion,SFM)算法、视频跟踪等技术。在一些实施例中,计算系统131可以用于为环境绘制地图、跟踪物体、估计物体的速度等等。计算系统131可以将所获取的各种信息进行分析并得出对车辆的控制策略。
整车控制器132可以用于对车辆的动力电池和引擎141进行协调控制,以提升车辆100的动力性能。
转向系统133可操作来调整车辆100的前进方向。例如在一个实施例中可以为方向盘系统。
油门134用于控制引擎141的操作速度并进而控制车辆100的速度。
制动系统135用于控制车辆100减速。制动系统135可使用摩擦力来减慢车轮144。在一些实施例中,制动系统135可将车轮144的动能转换为电流。制动系统135也可采取其他形式来减慢车轮144转速从而控制车辆100的速度。
驱动系统140可包括为车辆100提供动力运动的组件。在一个实施例中,驱动系统140可包括引擎141、能量源142、传动系统143和车轮144。引擎141可以是内燃机、电动机、空气压缩引擎或其他类型的引擎组合,例如汽油发动机和电动机组成的混动引擎,内燃引擎和空气压缩引擎组成的混动引擎。引擎141将能量源142转换成机械能量。
能量源142的示例包括汽油、柴油、其他基于石油的燃料、丙烷、其他基于压缩气体的燃料、乙醇、太阳能电池板、电池和其他电力来源。能量源142也可以为车辆100的其他系统提供能量。
传动系统143可以将来自引擎141的机械动力传送到车轮144。传动系统143可包括变速箱、差速器和驱动轴。在一个实施例中,传动系统143还可以包括其他器件,比如离合器。其中,驱动轴可包括可耦合到一个或多个车轮144的一个或多个轴。
车辆100的部分或所有功能受计算平台150控制。计算平台150可包括至少一个处理器151,处理器151可以执行存储在例如存储器152这样的非暂态计算机可读介质中的指令153。在一些实施例中,计算平台150还可以是采用分布式方式控制车辆100的个体组件或子系统的多个计算设备。
处理器151可以是任何常规的处理器,诸如商业可获得的CPU。替选地,处理器151还可以包括诸如图像处理器(Graphic Process Unit:GPU),现场可编程门阵列(FieldProgrammable Gate Array:FPGA)、片上系统(Sysem on Chip:SOC)、专用集成芯片(Application Specific Integrated Circuit:ASIC)或它们的组合。尽管图1功能性地图示了处理器、存储器、和在相同块中的计算机110的其它元件,但是本领域的普通技术人员应该理解该处理器、计算机、或存储器实际上可以包括可以或者可以不存储在相同的物理外壳内的多个处理器、计算机、或存储器。例如,存储器可以是硬盘驱动器或位于不同于计算机110的外壳内的其它存储介质。因此,对处理器或计算机的引用将被理解为包括对可以或者可以不并行操作的处理器或计算机或存储器的集合的引用。不同于使用单一的处理器来执行此处所描述的步骤,诸如转向组件和减速组件的一些组件每个都可以具有其自己的处理器,所述处理器只执行与特定于组件的功能相关的计算。
在此处所描述的各个方面中,处理器可以位于远离该车辆并且与该车辆进行无线通信。在其它方面中,此处所描述的过程中的一些在布置于车辆内的处理器上执行而其它则由远程处理器执行,包括采取执行单一操纵的必要步骤。
在一些实施例中,存储器152可包含指令153(例如,程序逻辑),指令153可被处理器151执行来执行车辆100的各种功能。存储器152也可包含额外的指令,包括向信息娱乐系统110、感知系统120、决策控制系统130驱动系统140中的一个或多个发送数据、从其接收数据、与其交互和/或对其进行控制的指令。
除了指令153以外,存储器152还可存储数据,例如道路地图、路线信息,车辆的位置、方向、速度以及其它这样的车辆数据,以及其他信息。这种信息可在车辆100在自主、半自主和/或手动模式中操作期间被车辆100和计算平台150使用。
计算平台150可基于从各种子系统(例如,驱动系统140、感知系统120和决策控制系统130)接收的输入来控制车辆100的功能。例如,计算平台150可利用来自决策控制系统130的输入以便控制转向系统133来避免由感知系统120检测到的障碍物。在一些实施例中,计算平台150可操作来对车辆100及其子系统的许多方面提供控制。
本实施例中,计算平台150可以从感知系统120中获取深度图像和彩色图像,利用深度图像中的深度信息对彩色图像进行修复处理以获得增强的彩色图像,具体地,该修复处理的实现可以软件的形式存储在存储器152中,由处理器151调用存储器152中的指令153来执行该修复处理。在获取增强的彩色图像之后,计算平台150可以将增强的彩色图像输出到其他系统以做进一步处理,比如将增强的彩色图像输出到信息娱乐娱乐系统110以供驾驶员观察到增强后的彩色图像,或者将增强的彩色图像系统输出到决策控制系统130以做相关决策处理。
可选地,上述这些组件中的一个或多个可与车辆100分开安装或关联。例如,存储器152可以部分或完全地与车辆100分开存在。上述组件可以按有线和/或无线方式来通信地耦合在一起。
可选地,上述组件只是一个示例,实际应用中,上述各个模块中的组件有可能根据实际需要增添或者删除,图1不应理解为对本申请实施例的限制。
在道路行进的自动驾驶汽车,如上面的车辆100,可以识别其周围环境内的物体以确定对当前速度的调整。所述物体可以是其它车辆、交通控制设备、或者其它类型的物体。在一些示例中,可以独立地考虑每个识别的物体,并且基于物体的各自的特性,诸如它的当前速度、加速度、与车辆的间距等,可以用来确定自动驾驶汽车所要调整的速度。
可选地,车辆100或者与车辆100相关联的感知和计算设备(例如计算系统131、计算平台150)可以基于所识别的物体的特性和周围环境的状态(例如,交通、雨、道路上的冰、等等)来预测所述识别的物体的行为。可选地,每一个所识别的物体都依赖于彼此的行为,因此还可以将所识别的所有物体全部一起考虑来预测单个识别的物体的行为。车辆100能够基于预测的所述识别的物体的行为来调整它的速度。换句话说,自动驾驶汽车能够基于所预测的物体的行为来确定车辆将需要调整到(例如,加速、减速、或者停止)什么稳定状态。在这个过程中,也可以考虑其它因素来确定车辆100的速度,诸如,车辆100在行驶的道路中的横向位置、道路的曲率、静态和动态物体的接近度等等。
除了提供调整自动驾驶汽车的速度的指令之外,计算设备还可以提供修改车辆100的转向角的指令,以使得自动驾驶汽车遵循给定的轨迹和/或维持与自动驾驶汽车附近的物体(例如,道路上的相邻车道中的轿车)的安全横向和纵向距离。
上述车辆100可以为轿车、卡车、摩托车、公共汽车、割草机、、施工设备、电车、高尔夫球车、火车等,本申请实施例不做特别的限定。
本申请实施例的应用场景:
本申请实施例提供了一种积水预警的方法,在本申请实施例中,车辆表示在车道上行驶的物体,并不限定为道路上行驶的机动车,也可以广泛应用于其他设备。例如,本申请实施例也可以应用于工业场景或物流场景下的机器人等;也可以应用于包含该模块的智能穿戴设备或智能终端中,在此处不做限定。
值的注意的是,本申请实施例以交通场景为例进行说明,并造成对本申请实施例的适用范围限定。因此,本申请实施例所出现的“车辆、自车或车体”均可替换为机器人、智能穿戴设备或智能终端设备,在此处不做限定。
涉水预警单元200用于收集车辆前方一定距离的涉水预警信息,特别是在下雨天气中,车辆通过涉水路段时,需要通过涉水预警信息提前判断是否进入涉水区域,不依赖外部设备。然而在缺少涉水预警信息的情况下盲目进入涉水区域,则有人身安全和财产损失的风险。在现有技术的方案中,涉水预警单元无法提前为车辆进入涉水区域提供涉水信息。
在现有技术的方案中,车辆需要涉水进入积水区域的情况下,才能获得积水区域的信息,导致车辆在得知积水区域信息时已经涉水过深,从而造成交通事故的发生。若积水区域深度超过该车辆的安全涉水深度时,可能导致车辆熄火,造成生命财产的损失。
基于现有技术的各种缺陷,本申请实施例提供了一种涉水预警的方法,通过提供一种涉水预警的方法及其装置解决上述问题,接下来介绍本申请实施例的所提供涉水预警的方法。
请参阅图2,图2为本申请实施例提供的涉水预警的流程示意图。该方法包括:
S310:对测距传感器进行标定,将全部测距传感器收集的环境数据统一在同一坐标系下。
该测距传感器包括光学测距仪和声学测距仪,参考所示,图4为本申请实施例提供的一种测距传感器的坐标示意图。在未完成标定步骤前,由于测距传感器1和测距传感器2的安装位置和朝向均不相同,导致同一目标像素点在各个测距传感器的坐标系中出现的位置也均不相同。
通过该S310步骤可以将该两个独立测距传感器坐标系关联起来,使得两者收集的环境数据统一在同一坐标系上,即反映同一物理世界位置的两个传感器的像素点所对应的同一坐标系上的坐标也相同。
值得一提的是,本申请实施例仅以图4进行示意性说明,并不对测距传感器的种类、数量以及安装位置构成限制。该多个测距传感器可以安装于面向行驶方向的车辆内部或者车辆外部。例如,该测距传感器可以安装在车内后视镜背面区域、也可以安装于车顶区域、或者是车内挡风玻璃区域,在此不做限定。值得一提的是,该多个测距传感器可以分别安装于不同区域,在此不做限定。例如,光学测距仪安装于车内后视镜背面区域,声学测距仪安装于前方保险杆处。
以测距传感器1为声学测距仪为例进行说明,该声学测距仪可以为声呐测距仪、超声波测距仪或者为其他可穿透水面完成测距任务的传感器。以超声波测距仪为例,所获得的点云存在于三维超声波坐标系中,坐标表达为(XS,YS,ZS),单位为米。将该三维超声波坐标系经过刚体变换,即可得到该点云在世界坐标系或车体坐标系的坐标。
以测距传感器2为光学测距仪为例进行说明,该光学测距仪可以为两个或多个光学相机所组成。该光学测距仪以双目视觉相机为例,两个相机获取的光学图像的坐标系均为像素坐标系(pixel coordinate system),坐标表达为(u,v),单位为像素,以光学图像左上角为原点,横坐标u和纵坐标v分别为图像所在的行和列。
对双目相机进行标定,分别获取光学测距仪的内参和外参。其中,内参指的是与相机自身特性相关的参数,比如相机的焦距f、像素大小、镜头的畸变等。外参指的是单个相机坐标系相对于其他坐标系的参数,比如两个相机之间的位置和姿态,该外参通常用相机坐标系相对于其他坐标系的旋转矩阵R和平移向量T来表示。本实施例中,光学测距仪的内参和外参可以通过标定算法计算得到,而标定算法为现有技术,在此不作赘述。根据该内外参数,对原始图像进行校正,校正后的两张图象位于同一平面且互相平行。对该两张图象进行像素点匹配,使得两张图像的部分像素点可以通过映射关系得以一一对应。根据两张图象的像素点的匹配结果,计算每个像素点的深度,从而获得该像素点在同一坐标系下的三维坐标。
值得一提的是,该同一坐标系可以为世界坐标系(Xw,YW,Zw),也可以为车体坐标系(Xv,Yv,Zv),在此不做限定,无论是哪一种坐标系,均能达到本申请实施例的效果。其中,世界坐标系和车体坐标系之间也可以通过刚体变换的方式进行转换。
参考图5所示,提供了一种车体坐标系的示意图,该车体坐标系为人为设定,原点可以为位于车头最前端的中点位置,该坐标系xy轴所构成的屏幕与车盘底部齐平。其中,x轴指向车体行进方向,y轴垂直于x轴并指向右,z轴垂直于xy轴构建的平面并指向路面方向。为了更清楚的阐述本申请实施例,本申请实施例以同一坐标系为车体坐标系进行说明。
值得一提的是,步骤S310为可选步骤,如果车辆在出厂时已完成标定,则该步骤可以省略。
S321:通过光学测距仪获取前方预设距离内积水区域的水面三维坐标信息T。
光学测距仪可以由两个或者多个光学相机组成,用于获取前方预设距离内积水区域的光学图像。值得一提的是,该光学测距仪已在步骤S310完成标定,即根据该光学图像可得到该积水区域的水面三维坐标信息,记为水面像素点坐标集合:T={(X1t,Y2t,Z3t)...(Xit,Yit,Zit)},其中Xit表示该水面像素点距离车体坐标系原点的直线距离,Yit表示该水面像素点距离车体坐标系原点的偏移距离,Zit表示该水面像素点距离车体坐标系原点的深度距离。
S322:通过声学测距仪获取前方预设距离内积水区域的路面三维坐标信息D。
声学测距仪可以是声呐测距仪、超声波测距仪或者为其他可以穿透水面完成测距任务的传感器,用于获取前方预设距离内积水区域的深度图像。同样地,该声学测距仪已在步骤310完成标定,根据该深度图像即可得到该积水区域的路面三维坐标信息,记为路面像素点坐标集合:D={(X1d,Y2d,Z3d)...(Xjd,Yjd,Zjd)}。
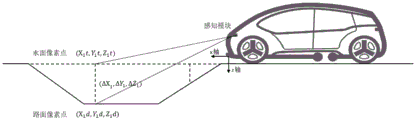
值得注意的是,可参考图6a,该水面的像素点坐标和路面的像素点坐标一一对应,例如一个水面的像素点的世界坐标为(X1t,Y1t,Z1t),则该水面像素点所对应的路面像素点世界坐标为(X1d,Y1d,Z1d),其中X1t=X1d,Y1t=Y1d,Z1t≠Z1d。由图6a可知,水面像素点和路面像素点在车体坐标中X和Y坐标值相同,Z坐标值不同。
在另一种可能实现方式中,参考图3,将步骤S322可以替换为步骤S323,也能达到本申请实施例的效果。即该积水区域的路面三维坐标信息D={(X1d,Y2d,Z3d)...(Xjd,Yjd,Zjd)}可以通过高精度地图信息结合GPS数据获取。该积水区域的路面三维坐标信息D也可以由用户上报获取。例如,一辆或多辆车经过该涉水区域,由用户通过感知装置获取该涉水区域的路面高度信息,并通过通信装置将该涉水区域的路面高度信息上报至系统。该系统将涉水区域的路面高度信息下发至所有用户,从而使得用户获得该涉水区域的路面三维坐标信息D。
S330:根据水面三维坐标信息T和路面三维坐标信息D,计算前方积水区域的最大积水深度。
参考图6b,图6b为本申请实施例提供的一种计算积水深度的示意图,在自车未进入积水区域前,自车通过感知模块获取前方预设近距离内单个水面像素点的车体坐标和其对应的路面像素点的车体坐标,分别记为(X1t,Y2t,Z3t)和(X1d,Y1d,Z1d)。将两个坐标相减,得到(ΔX1,ΔY1,ΔZ1),该位置的积水深度即为ΔZ1。例如,在步骤S330中,得到积水区域某一水面像素点的车体坐标为(X1t=0.1m,Y1t=2m,Z1t=1.5m),积水区域某一路面像素点的车体坐标为(X1d=0.1m,Y1d=2m,Z1d=2m),则坐标差值为(ΔX1=0,ΔY1=0,ΔZ1=0.5m),由此可知,该水面像素点的积水深度为0.5m。
遍历积水区域的所有像素点,将集合T和集合D中具有一一对应关系的像素点的Z值相减,得到坐标差值集合K={(0,0,ΔZ1)...(0,0,ΔZk)}。该积水区域的最大积水深度为集合K中ΔZ的最大值。
其中图6a和图6b仅作为示意,不反映真实世界中的车体与积水区域之间的比例。
S340:判断积水深度是否超出安全涉水深度。
通过比较数值大小的方式判断该最大积水深度是否超出安全涉水深度。其中,不同的车型对应不同的安全涉水深度,该安全涉水深度可以是排气口离地高度、车轮半高离地高度、门框离地高度、或发动机进气口离地高度中之一。例如,重型大货车为100至120厘米,普通大货车为45至80厘米,越野吉普车为60厘米,小客车不能超过40厘米。
S350:若最大积水深度超过安全涉水深度,则发出预警提示信息。
该预警提示信息包括视觉预警,声音预警、灯光预警、触觉预警等中的一种或者多种预警的结合。该预警提示信息包括具有可视化效果的前方积水区域距离、积水面积、最大积水宽度、或者最大涉水距离中的至少一项或者多项,以及最大积水深度。
例如,声音预警可以通过扬声器114将预警提示信息通过播报的行驶进行提醒。灯光预警可以通过车内氛围灯的明灭,闪烁等变化告知驾驶员前方积水区域的积水深度是否超过安全涉水深度。触觉预警可以通过方向盘的震动来告知驾驶员前方积水区域的积水深度是否超过安全涉水深度。其中,视觉预警可以通过中控显示屏,仪表显示屏,抬头显示(Head-up display,HUD)或其他至少一个车载显示设备对驾驶员发出视觉预警信息,
参照图7所示,为本申请实施例提供的一种视觉预警示意图。当自车检测到前方预设距离内存在积水区域,且该积水区域的最大积水深度超过安全涉水深度时,在至少一个车载显示设备中显示积水区域的预警信息,该预警信息可以是图像或文字形式,也可以是两者的结合。
图8、图9和图10为本申请的实施例提供可能的涉水预警装置的结构示意图。这些涉水预警装置可以用于实现上述方法实施例所具备的有益效果。
如图8模块所示,涉水预警装置800包括感知模块810、处理模块820、判断模块830以及预警模块840。
在本申请实施例中,涉水预警装置800可以是车辆的一部分。除了是车辆的一部分,该涉水预警单元与车辆之间还可以是其他关系,例如该涉水预警单元800不属于车辆,但可以通过一定的耦合关系为目标车辆提供涉水预警信息。各个模块也可以位于与车辆无线或者有线连接的其他设备中,此处不做限定。可选的,上述各装置模块集成在移动终端,通过向驾驶员显示或告知前方积水区域的预警,从而使车辆判断是否更改行驶策略以应对前方预设距离内的积水。可选的,各装置模块还可以是云服务器上的涉水预警模块,通过无线传输的方式与车辆交互数据,并为车辆确定前方预设距离内的积水区域的信息。
其中,感知模块810包括已经完成标定的光学测距仪和声学测距仪。通过光学测距仪和声学测距仪分别获取前方预设距离内的积水区域的光学图像和深度图像,该光学图像和该深度图像的相同位置的像素点对应相同的真实物理世界的坐标。
处理模块820用于根据获得的光学图像和深度图像获取积水区域的积水信息,该积水信息包括最大积水深度、最大积水宽度、最大积水长度或积水面积中至少一项。其中,计算最大积水宽度、最大积水长度或积水面积的方法流程与图二中的计算最大积水深度的方法流程类似,在次不再赘述。
判断模块830用于判断最大积水深度是否超过安全涉水距离。
预警模块840用于发出预警提示信息,该预警信息包括视觉预警,声音预警、灯光预警、触觉预警等中的一种或者多种预警的结合。涉水预警装置800用于实现上述图3中所示的方法实施例的功能时,感知模块810用于执行步骤S321和S322;处理模块820用于执行步骤S330;判断模块830用于执行步骤S340;预警模块840用于执行步骤S350。有关上述感知模块810、处理模块820、判断模块830、和预警模块840更详细的描述可以直接参考图3所示的方法实施例中相关描述直接得到,这里不加赘述。
应理解,以上涉水预警装置800的单元的划分仅仅是一种逻辑功能的划分。
如图9为本申请实施例提供的另一种涉水预警装置900示意图,包括感知模块910、定位模块911、通信模块912、处理模块920、判断模块930和预警模块940。
涉水预警装置900用于实现上述图3中所示的方法实施例的功能时,感知模块910、定位模块911和通信模块912用于执行步骤S321和S323;处理模块920用于执行步骤S330;判断模块930用于执行步骤S340;预警模块940用于执行步骤S350。有关上述感知模块910、定位模块911、通信模块912、处理模块920、判断模块930、和预警模块940更详细的描述可以直接参考图3所示的方法实施例中相关描述直接得到,这里不加赘述。
图10是本申请实施例的涉水预警装置的硬件结构示意图。图10所示的涉水预警装置1000包括存储器1001、处理器1002、通信接口1003以及总线1004。其中,存储器1001、处理器1002、通信接口1003通过总线1004实现彼此之间的通信连接。
存储器1001可以是ROM,静态存储设备和RAM。存储器1001可以存储程序,当存储器1001中存储的程序被处理器1002执行时,处理器1002和通信接口1003用于执行本申请实施例的涉水预警方法的各个步骤。
处理器1002可以采用通用的,CPU,微处理器,ASIC,GPU或者一个或多个集成电路,用于执行相关程序,以实现本申请实施例的涉水预警装置中的单元所需执行的功能,或者执行本申请方法实施例的涉水预警方法。
处理器1002还可以是一种集成电路芯片,具有信号的处理能力。在实现过程中,本申请实施例的涉水预警方法的各个步骤可以通过处理器1002中的硬件的集成逻辑电路或者软件形式的指令完成。
上述处理器1002还可以是通用处理器、DSP、ASIC、FPGA或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件。可以实现或者执行本申请实施例中的公开的各方法、步骤及逻辑框图。通用处理器可以是微处理器或者该处理器也可以是任何常规的处理器等。结合本申请实施例所公开的方法的步骤可以直接体现为硬件译码处理器执行完成,或者用译码处理器中的硬件及软件模块组合执行完成。软件模块可以位于随机存储器,闪存、只读存储器,可编程只读存储器或者电可擦写可编程存储器、寄存器等本领域成熟的存储介质中。该存储介质位于存储器1001,处理器1002读取存储器1001中的信息,结合其硬件完成本申请实施例的涉水预警装置中包括的单元所需执行的功能,或者执行本申请方法实施例的涉水预警方法。
通信接口1003使用例如但不限于收发器一类的收发装置,来实现涉水预警装置1000与其他设备或通信网络之间的通信。例如,可以通过通信接口1003获取待处理光学图像和深度图像。
总线1004可包括在装置1000各个部件(例如,存储器1001、处理器1002、通信接口1003)之间传送信息的通路。
应理解,本申请实施例中的处理器可以为中央处理单元(central processingunit,CPU),该处理器还可以是其他通用处理器、数字信号处理器(digital signalprocessor,DSP)、专用集成电路(application specific integrated circuit,ASIC)、现成可编程门阵列(field programmable gate array,FPGA)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等。通用处理器可以是微处理器或者该处理器也可以是任何常规的处理器等。
还应理解,本申请实施例中的存储器可以是易失性存储器或非易失性存储器,或可包括易失性和非易失性存储器两者。其中,非易失性存储器可以是只读存储器(read-only memory,ROM)、可编程只读存储器(programmable ROM,PROM)、可擦除可编程只读存储器(erasable PROM,EPROM)、电可擦除可编程只读存储器(electrically EPROM,EEPROM)或闪存。易失性存储器可以是随机存取存储器(random access memory,RAM),其用作外部高速缓存。通过示例性但不是限制性说明,许多形式的随机存取存储器(random accessmemory,RAM)可用,例如静态随机存取存储器(static RAM,SRAM)、动态随机存取存储器(DRAM)、同步动态随机存取存储器(synchronous DRAM,SDRAM)、双倍数据速率同步动态随机存取存储器(double data rate SDRAM,DDR SDRAM)、增强型同步动态随机存取存储器(enhanced SDRAM,ESDRAM)、同步连接动态随机存取存储器(synchlink DRAM,SLDRAM)和直接内存总线随机存取存储器(direct rambus RAM,DR RAM)。
上述实施例,可以全部或部分地通过软件、硬件、固件或其他任意组合来实现。当使用软件实现时,上述实施例可以全部或部分地以计算机程序产品的形式实现。所述计算机程序产品包括一个或多个计算机指令或计算机程序。在计算机上加载或执行所述计算机指令或计算机程序时,全部或部分地产生按照本申请实施例所述的流程或功能。所述计算机可以为通用计算机、专用计算机、计算机网络、或者其他可编程装置。所述计算机指令可以存储在计算机可读存储介质中,或者从一个计算机可读存储介质向另一个计算机可读存储介质传输,例如,所述计算机指令可以从一个网站站点、计算机、服务器或数据中心通过有线(例如红外、无线、微波等)方式向另一个网站站点、计算机、服务器或数据中心进行传输。所述计算机可读存储介质可以是计算机能够存取的任何可用介质或者是包含一个或多个可用介质集合的服务器、数据中心等数据存储设备。所述可用介质可以是磁性介质(例如,软盘、硬盘、磁带)、光介质(例如,DVD)、或者半导体介质。半导体介质可以是固态硬盘。
应理解,本文中术语“和/或”,仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,A和/或B,可以表示:单独存在A,同时存在A和B,单独存在B这三种情况,其中A,B可以是单数或者复数。另外,本文中字符“/”,一般表示前后关联对象是一种“或”的关系,但也可能表示的是一种“和/或”的关系,具体可参考前后文进行理解。
本申请中,“至少一个”是指一个或者多个,“多个”是指两个或两个以上。“以下至少一项(个)”或其类似表达,是指的这些项中的任意组合,包括单项(个)或复数项(个)的任意组合。例如,a,b,或c中的至少一项(个),可以表示:a,b,c,a-b,a-c,b-c,或a-b-c,其中a,b,c可以是单个,也可以是多个。
应理解,在本申请的各种实施例中,上述各过程的序号的大小并不意味着执行顺序的先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本申请实施例的实施过程构成任何限定。
本领域普通技术人员可以意识到,结合本文中所公开的实施例描述的各示例的单元及算法步骤,能够以电子硬件、或者计算机软件和电子硬件的结合来实现。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本申请的范围。
所属领域的技术人员可以清楚地了解到,为描述的方便和简洁,上述描述的系统、装置和单元的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赘述。
在本申请所提供的几个实施例中,应该理解到,所揭露的系统、装置和方法,可以通过其它的方式实现。例如,以上所描述的装置实施例仅仅是示意性的,例如,所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口,装置或单元的间接耦合或通信连接,可以是电性,机械或其它的形式。
所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
另外,在本申请各个实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。
所述功能如果以软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储介质中。基于这样的理解,本申请的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质中,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行本申请各个实施例所述方法的全部或部分步骤。而前述的存储介质包括:U盘、移动硬盘、只读存储器(read-only memory,ROM)、随机存取存储器(random access memory,RAM)、磁碟或者光盘等各种可以存储程序代码的介质。
以上所述,仅为本申请的具体实施方式,但本申请的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本申请揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本申请的保护范围之内。因此,本申请的保护范围应以所述权利要求的保护范围为准。
Claims (17)
1.一种涉水预警的方法,其特征在于,包括:
获取积水区域的光学图像和深度图像,所述光学图像和所述深度图像分别是由已标定的光学测距仪和声学测距仪所获得;
基于所述光学图像和所述深度图像,确定所述积水区域的最大积水深度;
判断所述最大积水深度是否大于安全涉水深度;
若所述最大积水深度大于所述安全涉水深度,发出预警提示信息。
2.根据权利要求1所述的方法,其特征在于,所述基于所述光学图像和所述深度图像,确定所述积水区域的最大积水深度包括:
基于所述光学图像和所述深度图像,确定所述积水区域的三维坐标信息;
基于所述积水区域的三维坐标信息,得到积水区域的最大积水深度。
3.根据权利要求2所述的方法,其特征在于,所述基于所述光学图像和所述深度图像,确定所述积水区域的三维坐标信息包括:
基于所述光学图像,确定水面像素点坐标集合,;
基于所述深度图像,确定路面像素点坐标集合,;
所述积水区域的三维坐标信息包括所述水面像素点坐标集合和所述路面像素点坐标集合,所述三维坐标为包含X轴、Y轴和Z轴的坐标系,其中,所述水面像素点坐标集合内的坐标与所述路面像素点坐标集合内的坐标具有一一对应关系,所述一一对应关系用于指示所述水面像素点和所述路面像素点在所述三维坐标系中X和Y坐标值相同,Z坐标值不同。
4.根据权利要求3所述的方法,其特征在于,所述基于所述积水区域的三维坐标信息,得到积水区域的最大积水深度包括:
将两个分别来自于所述水面像素点坐标集合和所述路面像素点坐标集合中具有所述一一对应关系的坐标点相减,得到坐标差值集合;
根据所述坐标差值集合,确定所述最大积水深度,其中,所述最大积水深度为所述坐标差值集合中Z坐标的最大值。
5.根据权利要求1-4所述的方法,其特征在于,所述方法还包括:
基于所述积水区域的光学图像,确定位于积水边缘的像素点的空间坐标集合;
根据所述空间坐标集合确定最大积水宽度、最大涉水距离或积水面积中的至少一个所述涉水信息。
6.根据权利要求1-5所述的方法,其特征在于,所述预警提示信息包括视觉预警,声音预警、灯光预警、触觉预警等中的一种或者多种预警的结合。
7.根据权利要求6所述的方法,其特征在于,所述视觉预警包括具有可视化效果的积水面积,积水宽度,积水深度中的至少一项或者多项的结合。
8.一种涉水预警装置,其特征在于,包括:
感知模块,用于获取积水区域的光学图像和深度图像,所述光学图像和所述深度图像分别是由已标定的光学测距仪和声学测距仪所获得;
处理模块,用于基于所述光学图像和所述深度图像,确定所述积水区域的最大积水深度;
判断模块,用于判断所述最大积水深度是否大于安全涉水深度;
预警模块,若所述最大积水深度大于所述安全涉水深度,用于发出预警提示信息。
9.根据权利要求8所述的涉水预警装置,其特征在于,所述处理模块具体用于:
基于所述光学图像和所述深度图像,确定所述积水区域的三维坐标信息;
基于所述积水区域的三维坐标信息,得到积水区域的最大积水深度。
10.根据权利要求9所述的涉水预警装置,其特征在于,所述基于所述光学图像和所述深度图像,确定所述积水区域的三维坐标信息:
基于所述光学图像,确定水面像素点坐标集合;
基于所述深度图像,确定路面像素点坐标集合;
所述积水区域的三维坐标信息包括所述水面像素点坐标集合和所述路面像素点坐标集合,所述三维坐标为包含X轴、Y轴和Z轴的坐标系,其中,所述水面像素点坐标集合内的坐标与所述路面像素点坐标集合内的坐标具有一一对应关系,所述一一对应关系用于指示所述水面像素点和所述路面像素点在所述三维坐标系中X和Y坐标值相同,Z坐标值不同。
11.根据权利要求10所述的涉水预警装置,其特征在于,所述基于所述积水区域的三维坐标信息,得到积水区域的最大积水深度。
将两个分别来自于所述水面像素点坐标集合和所述路面像素点坐标集合中具有所述一一对应关系的坐标点相减,得到坐标差值集合;
根据所述坐标差值集合,确定所述最大积水深度,其中,所述最大积水深度为所述坐标差值集合中Z坐标的最大值。
12.根据权利要求8-11所述的涉水预警装置,其特征在于,所述计算模块基于所述积水区域的空间位置三维信息,得到积水信息,所述积水信息包括最大积水宽度、最大涉水距离和积水面积包括:
基于所述光学图像,确定位于积水边缘的像素点的空间坐标集合;
根据所述空间坐标集合确定最大积水宽度、最大涉水举例或积水面积中的至少一个所述涉水信息。
13.根据权利要求8-12所述的涉水预警装置,其特征在于,所述预警提示信息包括视觉预警,声音预警、灯光预警、触觉预警等中的一种预警或者两种以上预警的结合。
14.根据权利要求13所述的涉水预警装置,其特征在于,所述视觉预警包括具有可视化效果的积水面积,积水宽度,积水深度中的至少一项或者两种以上的结合。
15.一种涉水预警装置,其特征在于,包括:
至少一个处理器;
至少一个存储器,存储有计算机程序,当所述计算机程序被处理器执行时,实现如权利要求1-7中的任意一项所述的图像处理方法。
16.一种计算机程序产品,所述计算机程序产品包括:计算机程序代码,当所述计算机程序代码运行时,使得处理器执行权利要求1-10中的任意一种方法。
17.一种车辆,其特征在于,所述车辆包括行进系统、传感系统、控制系统和计算机系统,其中,所述计算机系统用于执行如权利要求1-10任意一项所述的方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111320824.3A CN116106931A (zh) | 2021-11-09 | 2021-11-09 | 一种涉水预警的方法及相关装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111320824.3A CN116106931A (zh) | 2021-11-09 | 2021-11-09 | 一种涉水预警的方法及相关装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN116106931A true CN116106931A (zh) | 2023-05-12 |
Family
ID=86266044
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202111320824.3A Pending CN116106931A (zh) | 2021-11-09 | 2021-11-09 | 一种涉水预警的方法及相关装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN116106931A (zh) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116758134A (zh) * | 2023-06-01 | 2023-09-15 | 北京鉴智科技有限公司 | 路面积水深度的预测方法、装置、电子设备及可读介质 |
| CN117636662A (zh) * | 2023-12-10 | 2024-03-01 | 广东东软学院 | 一种涉水路段的防浸水交通控制方法及系统 |
| CN118182432A (zh) * | 2024-03-27 | 2024-06-14 | 岚图汽车科技有限公司 | 涉水行驶车辆控制方法、装置、设备及存储介质 |
| CN118597139A (zh) * | 2024-06-28 | 2024-09-06 | 岚图汽车科技有限公司 | 积水路面的车辆控制方法、装置、设备及存储介质 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104050825A (zh) * | 2013-03-13 | 2014-09-17 | 厦门歌乐电子企业有限公司 | 搭载于车辆上的终端装置、车辆及水坑路面的提醒方法 |
| DE102017009594A1 (de) * | 2017-10-16 | 2018-07-05 | Daimler Ag | Verfahren zur Erkennung einer Wassertiefe |
| CN109444894A (zh) * | 2018-12-27 | 2019-03-08 | 镇江市高等专科学校 | 道路积水深度快速移动测量装置及方法 |
| CN109696221A (zh) * | 2019-02-01 | 2019-04-30 | 浙江大学 | 一种多传感协同校准的实时路面积水在线监测装置及方法 |
| KR102016037B1 (ko) * | 2019-05-08 | 2019-08-29 | 주식회사 월드씨앤에스 | 식별표지를 이용한 수위 측정 장치 |
| CN110411366A (zh) * | 2019-07-31 | 2019-11-05 | 北京领骏科技有限公司 | 一种道路积水深度的检测方法及电子设备 |
| CN112937486A (zh) * | 2021-03-16 | 2021-06-11 | 吉林大学 | 一种道路积水车载在线监测与驾驶辅助系统及方法 |
-
2021
- 2021-11-09 CN CN202111320824.3A patent/CN116106931A/zh active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104050825A (zh) * | 2013-03-13 | 2014-09-17 | 厦门歌乐电子企业有限公司 | 搭载于车辆上的终端装置、车辆及水坑路面的提醒方法 |
| DE102017009594A1 (de) * | 2017-10-16 | 2018-07-05 | Daimler Ag | Verfahren zur Erkennung einer Wassertiefe |
| CN109444894A (zh) * | 2018-12-27 | 2019-03-08 | 镇江市高等专科学校 | 道路积水深度快速移动测量装置及方法 |
| CN109696221A (zh) * | 2019-02-01 | 2019-04-30 | 浙江大学 | 一种多传感协同校准的实时路面积水在线监测装置及方法 |
| KR102016037B1 (ko) * | 2019-05-08 | 2019-08-29 | 주식회사 월드씨앤에스 | 식별표지를 이용한 수위 측정 장치 |
| CN110411366A (zh) * | 2019-07-31 | 2019-11-05 | 北京领骏科技有限公司 | 一种道路积水深度的检测方法及电子设备 |
| CN112937486A (zh) * | 2021-03-16 | 2021-06-11 | 吉林大学 | 一种道路积水车载在线监测与驾驶辅助系统及方法 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116758134A (zh) * | 2023-06-01 | 2023-09-15 | 北京鉴智科技有限公司 | 路面积水深度的预测方法、装置、电子设备及可读介质 |
| CN117636662A (zh) * | 2023-12-10 | 2024-03-01 | 广东东软学院 | 一种涉水路段的防浸水交通控制方法及系统 |
| CN117636662B (zh) * | 2023-12-10 | 2024-07-26 | 广东东软学院 | 一种涉水路段的防浸水交通控制方法及系统 |
| CN118182432A (zh) * | 2024-03-27 | 2024-06-14 | 岚图汽车科技有限公司 | 涉水行驶车辆控制方法、装置、设备及存储介质 |
| CN118597139A (zh) * | 2024-06-28 | 2024-09-06 | 岚图汽车科技有限公司 | 积水路面的车辆控制方法、装置、设备及存储介质 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12019443B2 (en) | Use of detected objects for image processing | |
| US11255974B2 (en) | Method of determining position of vehicle and vehicle using the same | |
| JP6441993B2 (ja) | レーザー点クラウドを用いる物体検出のための方法及びシステム | |
| JP6622265B2 (ja) | 交通信号とそれらに関連した状態を検出するためのロバスト法 | |
| CN116106931A (zh) | 一种涉水预警的方法及相关装置 | |
| CN112512887A (zh) | 一种行驶决策选择方法以及装置 | |
| JP2015212941A (ja) | 複数のセンサーを用いる物体検出方法及びシステム | |
| CN108290521A (zh) | 一种影像信息处理方法及增强现实ar设备 | |
| US12319275B2 (en) | Mapping method and apparatus, vehicle, readable storage medium, and chip | |
| CN115205365A (zh) | 车辆距离检测方法、装置、车辆、可读存储介质及芯片 | |
| US20250292550A1 (en) | Data Processing Method and Apparatus | |
| CN114842454B (zh) | 障碍物检测方法、装置、设备、存储介质、芯片及车辆 | |
| CN115265561A (zh) | 车辆定位方法、装置、车辆及介质 | |
| CN115205461A (zh) | 场景重建方法、装置、可读存储介质及车辆 | |
| CN115082886B (zh) | 目标检测的方法、装置、存储介质、芯片及车辆 | |
| CN114842075B (zh) | 数据标注方法、装置、存储介质及车辆 | |
| JP2026504647A (ja) | 自動駐車方法および装置 | |
| CN115220449A (zh) | 路径规划的方法、装置、存储介质、芯片及车辆 | |
| CN115082573B (zh) | 参数标定方法、装置、车辆及存储介质 | |
| CN115407344B (zh) | 栅格地图创建方法、装置、车辆及可读存储介质 | |
| CN115164910A (zh) | 行驶路径生成方法、装置、车辆、存储介质及芯片 | |
| CN114822216B (zh) | 生成车位地图的方法、装置、车辆、存储介质及芯片 | |
| WO2026066477A1 (zh) | 一种地图信息的处理方法、地图信息的获取方法以及设备 | |
| CN115440067A (zh) | 复眼摄像系统、使用复眼摄像系统的车辆及其影像处理方法 | |
| CN119659673A (zh) | 智能驾驶决策规划方法、装置、电子设备及可读存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |