CN116242577A - 一种风洞集群特种天平及集群测量的风洞系统 - Google Patents
一种风洞集群特种天平及集群测量的风洞系统 Download PDFInfo
- Publication number
- CN116242577A CN116242577A CN202310501706.5A CN202310501706A CN116242577A CN 116242577 A CN116242577 A CN 116242577A CN 202310501706 A CN202310501706 A CN 202310501706A CN 116242577 A CN116242577 A CN 116242577A
- Authority
- CN
- China
- Prior art keywords
- balance
- wind tunnel
- cluster
- specialty
- measurement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images
Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M9/00—Aerodynamic testing; Arrangements in or on wind tunnels
- G01M9/06—Measuring arrangements specially adapted for aerodynamic testing
- G01M9/062—Wind tunnel balances; Holding devices combined with measuring arrangements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64F—GROUND OR AIRCRAFT-CARRIER-DECK INSTALLATIONS SPECIALLY ADAPTED FOR USE IN CONNECTION WITH AIRCRAFT; DESIGNING, MANUFACTURING, ASSEMBLING, CLEANING, MAINTAINING OR REPAIRING AIRCRAFT, NOT OTHERWISE PROVIDED FOR; HANDLING, TRANSPORTING, TESTING OR INSPECTING AIRCRAFT COMPONENTS, NOT OTHERWISE PROVIDED FOR
- B64F5/00—Designing, manufacturing, assembling, cleaning, maintaining or repairing aircraft, not otherwise provided for; Handling, transporting, testing or inspecting aircraft components, not otherwise provided for
- B64F5/60—Testing or inspecting aircraft components or systems
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Fluid Mechanics (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Transportation (AREA)
- Aviation & Aerospace Engineering (AREA)
- Aerodynamic Tests, Hydrodynamic Tests, Wind Tunnels, And Water Tanks (AREA)
Abstract
本发明涉及风洞测量领域,特别是公开了一种风洞集群特种天平及集群测量的风洞系统,包括固定框、浮动框、刚性梁及消扰梁;所述固定框包括预制凹槽,所述刚性梁及所述消扰梁将所述浮动框串在所述预制凹槽中;所述刚性梁及所述消扰梁沿天平轴向排列,且所述消扰梁分布在所述刚性梁两侧;所述消扰梁的刚度各向异性,所述消扰梁在所述天平轴向方向上的刚度小于天平法向方向上的刚度,且小于所述刚性梁的刚度。本发明与所述天平轴向相关的力与力矩被集中施加在所述刚性梁上,但消扰梁在天平法向方向上刚度不减,使所述风洞集群特种天平在各个方向上的均能得到很高的测量精准度,完成了风洞试验领域首次16台天平集群测量的型号试验任务。
Description
技术领域
本发明涉及风洞测量领域,特别是涉及一种风洞集群特种天平及集群测量的风洞系统。
背景技术
为了获得飞行器的副翼、升降舵和方向舵的铰链力矩气动特性数据,通常采用低速风洞全机模型试验,采用片式铰链力矩天平测量飞机模型舵面铰链力矩,这种天平沿厚度方向较薄,便于安置于舵面所属翼型内。
所述片式铰链力矩天平根据可同时测量的力、力矩的种类数量多少不同,而被分为二分量天平、三分量天平等等,当然,出于对风洞测试的需求,获取的飞行器翼面的数据肯定是种类越多、数据越详实越好,但越多的分量也意味着天平本身结构越复杂,而由于应用场景为机翼,对天平的体积要求又高,复杂的结构加上较小的体积,就会导致各个分量的测量之间互相干扰,进而使测量准确度下降,但如果采用分量数较少的二分量天平或三分量天平,则会由于部分力或力矩被忽略导致最后计算出的翼面受力情况与实际情况相差较远,使风洞测量的测量准确性长期难以得到提升。
因此,如何提升在风洞测量中对翼面的受力及力矩的测量准确度,是本领域技术人员亟待解决的问题。
发明内容
本发明的目的是提供一种风洞集群特种天平及集群测量的风洞系统,以解决现有技术中风洞测量的准确性较差的问题。
为解决上述技术问题,本发明提供一种风洞集群特种天平,包括固定框、浮动框、刚性梁及消扰梁;
所述固定框包括预制凹槽,所述刚性梁及所述消扰梁将所述浮动框串在所述预制凹槽中;所述刚性梁及所述消扰梁沿天平轴向排列,且所述消扰梁分布在所述刚性梁两侧;
所述消扰梁的刚度各向异性,所述消扰梁在所述天平轴向方向上的刚度小于天平法向方向上的刚度,且小于所述刚性梁的刚度。
可选地,在所述的风洞集群特种天平中,所述消扰梁为消扰铰链。
可选地,在所述的风洞集群特种天平中,所述消扰铰链为双圆弧铰链。
可选地,在所述的风洞集群特种天平中,所述固定框为翼型框;
所述翼型框与翼面基座组成待测翼面。
可选地,在所述的风洞集群特种天平中,所述浮动框包括固定卡槽;
所述浮动框通过所述固定卡槽与待测结构相连。
可选地,在所述的风洞集群特种天平中,所述预制凹槽包括近端侧与远端侧;所述远端侧与所述固定框的根部之间包括调整狭缝;
所述调整狭缝沿天平轴向方向开口,使测量过程中其他分量对主分量的耦合干扰小于第一阈值。
可选地,在所述的风洞集群特种天平中,所述第一阈值的范围为5%至15%,包括端点值。
可选地,在所述的风洞集群特种天平中,调整区的宽度与所述近端侧的宽度的比值范围为0.4至0.8,包括端点值;所述调整区为所述调整狭缝与所述预制凹槽的远端侧之间的区域。
一种集群测量的风洞系统,包括上述任一种所述的风洞集群特种天平。
可选地,在所述的集群测量的风洞系统中,所述集群测量的风洞系统包括多个所述风洞集群特种天平,所述风洞集群特种天平被分类为母天平及子天平;
所述母天平的固定框与翼面基座固定连接;所述子天平的固定框与对应的母天平的浮动框固定连接。
本发明所提供的风洞集群特种天平,包括固定框、浮动框、刚性梁及消扰梁;所述固定框包括预制凹槽,所述刚性梁及所述消扰梁将所述浮动框串在所述预制凹槽中;所述刚性梁及所述消扰梁沿天平轴向排列,且所述消扰梁分布在所述刚性梁两侧;所述消扰梁的刚度各向异性,所述消扰梁在所述天平轴向方向上的刚度小于天平法向方向上的刚度,且小于所述刚性梁的刚度。
经过大量理论计算与实际检验,发现在多梁结构的多分量天平在测量时,相邻的梁由于自身刚度的影响相互承担不由自身测量的力,导致测量准确度下降,而本发明将所述刚性梁周边的消扰梁设置成刚度各向异性的梁,使得在测量所述天平轴向的力时,由于所述消扰梁在所述天平轴向上刚度小,因此与所述天平轴向相关的力与力矩被集中施加在所述刚性梁上,使通过刚性梁测量的力学数据更准确,另一方面,所述消扰梁在天平法向方向上刚度不减,依旧可准确获取在所述天平法向上的力学数据,使所述风洞集群特种天平在各个方向上的均能得到很高的测量精准度。本发明同时还提供了一种具有上述有益效果的集群测量的风洞系统。
附图说明
为了更清楚的说明本发明实施例或现有技术的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
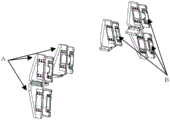
图1-1及图1-2为本发明提供的风洞集群特种天平的一种具体实施方式的结构示意图;
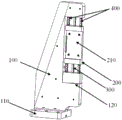
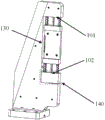
图2为本发明提供的集群测量的风洞系统的一种具体实施方式的结构示意图;
图3-1、图3-2及图3-3为本发明提供的风洞集群特种天平的一种具体实施方式的电路结构示意图;
图4-1及图4-2为本发明提供的风洞集群特种天平的一种具体实施方式应用于风洞后的风洞示意图。
图中包括多种附图标记,具体为100-固定框、200-浮动框、300-刚性梁、400-消扰梁、101-近端侧、102-远端侧、210-固定卡槽、130-预制凹槽、110-根部连接端、120-调整狭缝、140-调整区、A-母天平、B-子天平、1至24-应变片。
具体实施方式
为了使本技术领域的人员更好地理解本发明方案,下面结合附图和具体实施方式对本发明作进一步的详细说明。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
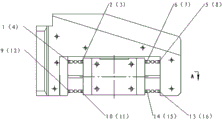
本发明的核心是提供一种风洞集群特种天平,其一种具体实施方式的结构示意图如图1-1及图1-2所示,称其为具体实施方式一,包括固定框100、浮动框200、刚性梁300及消扰梁400;
所述固定框100包括预制凹槽130,所述刚性梁300及所述消扰梁400将所述浮动框200串在所述预制凹槽130中;所述刚性梁300及所述消扰梁400沿天平轴向排列,且所述消扰梁400分布在所述刚性梁300两侧;
所述消扰梁400的刚度各向异性,所述消扰梁400在所述天平轴向方向上的刚度小于天平法向方向上的刚度,且小于所述刚性梁300的刚度。
作为一种具体实施方式,所述消扰梁400为消扰铰链。可参考图1-1及图1-2,铰链在一方面在其旋转/弯折方向上有足够的灵活度,另一方面在与所述旋转/弯折方向垂直的方向(非铰链本身的延伸方向)上,又有足够的刚度,避免被弯折,保证了所述消扰梁400的刚度各向异性,且通过活动件实现的低刚度高可弯折性的使用寿命更长,工作稳定性更好。
更进一步地,所述消扰铰链为双圆弧铰链。圆弧边侧缝隙很小,当变形较大时较小的侧缝可以起保护铰链本身结构的作用,使不至于损坏,进一步提升其使用寿命与工作稳定性。
另外,作为一种优选实施方式,所述固定框100为翼型框;
所述翼型框与翼面基座组成待测翼面。
在本优选实施方式中,所述风洞集群特种天平不再填充进搭建好的待测翼面中,而是将天平自身的固定框100形状改变,成为所述待测翼面的一部分,因为实际上测量力学参数的结构为所述浮动框200及与所述浮动框200连接的梁,所述固定框100只起到提供固定平台的作用,因此将所述固定框100改为所述待测翼面的一部分,大大降低了所述风洞集群特种天平对空间的需求,增加了所述风洞集群特种天平的泛用性,同时由于可用空间的增加,降低了对集成度的需求,提升了工作稳定性。更具体地,所述翼型框通过根部连接端110与所述翼面基座连接,如图1-1所示。
还有,所述浮动框200包括固定卡槽210;
所述浮动框200通过所述固定卡槽210与待测结构相连。
在所述浮动框200上设置固定卡槽210,增加所述固定卡槽210与所述待测结构之间的连接稳固性,避免所述浮动框200与所述待测结构之间在测试过程中发生相对位移导致测量结构的准确性下降,提升了天平的测量准确性与工作稳定性,当然,也可通过其他手段稳固所述浮动框200与所述待测结构之间的连接,本发明在此不作限定。
作为另一种优选实施方式,所述预制凹槽130包括近端侧101与远端侧102;所述远端侧102与所述固定框100的根部之间包括调整狭缝120;
所述调整狭缝120沿天平轴向方向开口,使测量过程中其他分量对主分量的耦合干扰小于第一阈值。
其中,所述远端侧102与近端侧101分别指距离所述待测翼面的尖端较远的一侧与距离所述尖端较近的一侧,需要注意的是,由于所述风洞集群特种天平测量力学数据的本质是通过梁的形变进行的测量,而梁在受力后的形变不仅要看梁自身的性质,天平的梁两端连接处的物理特性也会对其造成影响,机翼的形状通常是根部较粗而尖端较细,因此位于所述预制凹槽130远端侧102附近的固定框100厚度较厚,刚度较强,而位于所述预制凹槽130近端侧101附近的固定框100厚度较厚,刚度较弱,这会使位于两端分别连接所述近端侧101与所述远端侧102的刚性梁300与消扰梁400两侧形变不一致,反映到测试的力学数据上即其他分两队主分量的耦合干扰,进而影响测得的力学数据的准确性。
本申请中在所述远端侧102附近的固定框100上设置所述调整狭缝120,破坏了附近的固定框100的连续性与完整性,削弱较厚的固定框100根部对所述刚性梁300与所述消扰梁400的支撑,使所述刚性梁300与所述消扰梁400两侧的固定框100提供的刚度相近,从而平衡了测量中各个分量的敏感度,降低了其他分量对主分量的耦合干扰,提升了测量准确性。
优选地,所述调整狭缝120的延伸方向为所述天平轴向方向,如此可具体到各个梁对应的区域的刚度一致,进一步提升测试准确率。
进一步地,所述第一阈值的范围为5%至15%,包括端点值,如5.0%、10.2%或15.0%中的任一个,上述范围为通过大量理论计算与实际检验后得出的范围,上述范围可经由次数较少的参数校正后得到,方便快捷,同时造成的耦合干扰也在可以接受的范围内,当然,也可根据实际情况作相应调整。
再进一步地,调整区140的宽度与所述近端侧101的宽度的比值范围为0.4至0.8,包括端点值,如0.40、0.59或0.80中的任一个;所述调整区140为所述调整狭缝120与所述预制凹槽130的远端侧102之间的区域。所述宽度指从所述待测翼面的根部至尖端的方向上的距离,经过大量理论计算与实际检验之后发现,由于所述尖端通常较薄,根部较厚,而设置所述调整狭缝120的本质是划出所述调整区140,使所述调整区140为所述刚性梁300与所述消扰梁400提供的刚度与所述尖端到所述近端侧101之间的固定框100提供的刚度近似,因所述调整区140更厚,因此所述调整区140的宽度应该比所述尖端到所述近端侧101之间的宽度更短。
优选地,所述消扰梁400在所述刚性梁300两侧各存在一条,也即本发明提供的风洞集群特种天平为三梁天平,三梁天平可测量五分量,为一种较为通用,且测量数据较为全面的天平,在复杂结构、可靠性及精准度之间得到较好平衡。
本发明所提供的风洞集群特种天平,包括固定框100、浮动框200、刚性梁300及消扰梁400;所述固定框100包括预制凹槽130,所述刚性梁300及所述消扰梁400将所述浮动框200串在所述预制凹槽130中;所述刚性梁300及所述消扰梁400沿天平轴向排列,且所述消扰梁400分布在所述刚性梁300两侧;所述消扰梁400的刚度各向异性,所述消扰梁400在所述天平轴向方向上的刚度小于天平法向方向上的刚度,且小于所述刚性梁300的刚度。经过大量理论计算与实际检验,发现在多梁结构的多分量天平在测量时,相邻的梁由于自身刚度的影响相互承担不由自身测量的力,导致测量准确度下降,而本发明将所述刚性梁300周边的消扰梁400设置成刚度各向异性的梁,使得在测量所述天平轴向的力时,由于所述消扰梁400在所述天平轴向上刚度小,因此与所述天平轴向相关的力与力矩被集中施加在所述刚性梁300上,使通过刚性梁300测量的力学数据更准确,另一方面,所述消扰梁400在天平法向方向上刚度不减,依旧可准确获取在所述天平法向上的力学数据,使所述风洞集群特种天平在各个方向上的均能得到很高的测量精准度。
本发明还提供了一种集群测量的风洞系统,称其为具体实施方式二,包括上述任一种所述的风洞集群特种天平。
作为一种优选实施方式,所述集群测量的风洞系统包括多个所述风洞集群特种天平,所述风洞集群特种天平被分类为母天平及子天平;
所述母天平的固定框100与翼面基座固定连接;所述子天平的固定框100与对应的母天平的浮动框200固定连接。
请见图2,图2为本优选实施方式的结构示意图,将所述子天平的固定框100连接至对应的母天平的浮动框200上,而所述子天平的浮动框200还可安装另外的待测结构(图2中未画出),至此,所述母天平测得的数据为所述子天平所在面的力学数据与所述另外的待测结构的力学数据的和,而所述子天平测得的数据为所述另外的待测结构的力学数据,两者相减也可得所述子天平所在面的力学数据,本具体实施方式提供的方案可进一步拓宽所述风洞集群特种天平的泛用性,在同时进行多面数据测量的同时,大大减小空间需求,使所述集群测量的风洞系统适应更多场合。
本发明所提供的集群测量的风洞系统,包括上述任一种所述的风洞集群特种天平。所述风洞集群特种天平包括固定框100、浮动框200、刚性梁300及消扰梁400;所述固定框100包括预制凹槽130,所述刚性梁300及所述消扰梁400将所述浮动框200串在所述预制凹槽130中;所述刚性梁300及所述消扰梁400沿天平轴向排列,且所述消扰梁400分布在所述刚性梁300两侧;所述消扰梁400的刚度各向异性,所述消扰梁400在所述天平轴向方向上的刚度小于天平法向方向上的刚度,且小于所述刚性梁300的刚度。经过大量理论计算与实际检验,发现在多梁结构的多分量天平在测量时,相邻的梁由于自身刚度的影响相互承担不由自身测量的力,导致测量准确度下降,而本发明将所述刚性梁300周边的消扰梁400设置成刚度各向异性的梁,使得在测量所述天平轴向的力时,由于所述消扰梁400在所述天平轴向上刚度小,因此与所述天平轴向相关的力与力矩被集中施加在所述刚性梁300上,使通过刚性梁300测量的力学数据更准确,另一方面,所述消扰梁400在天平法向方向上刚度不减,依旧可准确获取在所述天平法向上的力学数据,使所述风洞集群特种天平在各个方向上的均能得到很高的测量精准度。
下面对本发明的背景及具体结构、数据处理过程做相应补充,包括:
为了获得飞机副翼、升降舵和方向舵的铰链力矩气动特性数据,通常采用低速风洞全机模型试验,模型比例1:6。模型由机身、机翼、尾翼、雷达罩等四大部件组成。其中风洞采用8米×6米的开口式大型低速风洞。第二试验段长15m、宽8m、高6m,横截面为切角矩形;试验段中心截面有效面积47.4m2;常用风速为20m/s~80m/s。其风洞试验的支撑系统为特大攻角试验装置,特大攻角试验装置主要由变角度机构、Y向机构及基座、辅助装置、液压及控制测量系统组成,试验设备位于风洞第二试验段后部,其安装基础(双立板中心线)距试验段转盘中心6800mm,距扩散段第一圈梁中心距离为1700mm。
其中,副翼包括有:(1)左侧副翼;(2)右侧副翼。
升降舵包括有:(1)左侧升降舵;(2)右侧升降舵。
方向舵包括有:(1)右内后方向舵;(2)左内后方向舵;(3)右外上后方向舵;(4)左外上后方向舵;(5)右外下前方向舵;(6)左外下前方向舵;(7)左外上前方向舵;(8)右外上前方向舵;(9)左外上后方向舵;(10)右外上后方向舵;(11)左内前方向舵;(12)右内前方向舵。
试验的主要干扰源为螺旋桨及其控制系统,螺旋桨驱动系统主要由120kW永磁无刷式直流电动机、调速装置、操作控制台和冷却水等系统组成。120kW电机及控制系统的主要参数如下:
额定功率…………120kW;
额定转速…………6700RPM;
额定扭矩…………171N·m;
电机外径…………Φ180mm。
下面由实验数据佐证本发明的有益效果,请注意,下文中Fy表示法向力,Fx表示轴向力,Mz表示铰链力矩,My表示偏航力矩,Mx表示滚转力矩
由实际检验的数据而言,对所述以风洞集群特种天平进行附加刚度分析,天平自身灵敏度输出为参考值,改变校准连接板的刚度,天平的附加刚度随之改变,Fy、Fx、Mx的灵敏度变化小于0.5%,Mz、My的灵敏度变化小于3%。
再进行带加载头校准与舵面加载,具体地,测量Fy、Mz、Fx、My、Mx五个分量,天平静态校准后,进行了带舵面检验加载,两种状态下Fy 、Mz、Fx、Mx的灵敏度变化小于0.5%,My分量主项系数变化小于2%,天平公式不用修正。
下面提供五种在所述风洞集群特种天平基础上的五分量特种试验天平,各个天平的安装位置与朝向(偏转方向)不同,分别为NQ(内前)天平、WSQL(外上前左)天平、WXQL(外下前左)天平、WSQR(外上前右)天平、WXQR(外下前右)天平,其中Y轴为铰链轴,X轴为阻力方向。各天平设计载荷见表1,其中已考虑模型自重影响。
表1 天平设计载荷
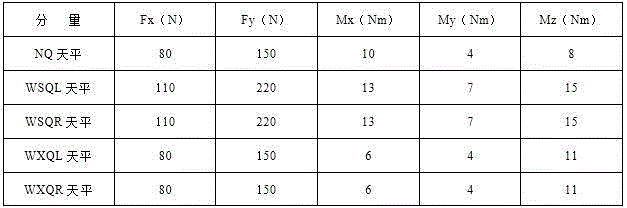
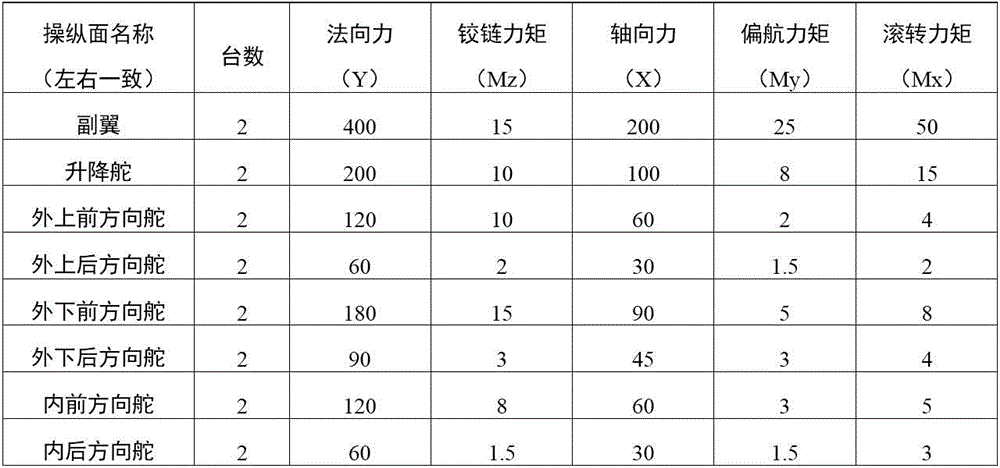
测量元件为三柱梁组合元件,中心梁测量Fx、My分量;周边梁测量Fy、Mz、Mx分量。Fx/My分量、Fy/Mz/Mx分量的分解采用电气解耦。同时,为提高侧向力的灵敏度,在周边梁上对称布置有双圆弧铰链。其中WSQR天平载荷与WSQL天平相同,模型空间一致,两者关于飞机模型中心对称;WXQR天平载荷与WXQL天平相同,模型空间一致,两者关于飞机模型中心对称。经过实验后得到的各个操纵面填平性能参数如表2所示。
表2 各操纵面天平性能参数
下面展开说明一种具体实施方式由安装到测量的全流程,包括:
首先进行天平安装:
两台副翼特种试验天平左右对称安装在机翼上,天平固定端与机翼相连,另一端与副翼通过角度块连接。副翼舵面后缘下偏为正向偏转,试验时左右两侧副翼舵面偏度相同。
两台升降舵特种试验天平分别安装在左、右侧平尾上,应变天平固定端与平尾安定面相连,另一端与升降舵通过角度块连接。升降舵舵面后缘下偏为正向偏转。
12台方向舵特种试验天平左右对称安装在尾翼上,其中前侧6台方向舵天平外形设计成垂尾安定面形式,既作为测量元件,同时也是模型连接件与平尾连接;后侧6台方向舵天平通过角度块与后方向舵连接,并通过角度块安装在前方向舵天平上,如图2所示。
方向舵舵面后缘左偏为正向偏转。试验时所有方向舵偏转角度一致,后侧方向舵在前舵偏转的基础上偏转相同角度。
其次设置外界条件:
模型 以机身水平构造线所在平面为基准度量,范围为-8°~23°;
以机身水平构造线所在平面为基准度量,范围为-8°~23°;
模型 以模型纵向对称面为基准度量,范围为-20°~20°。
以模型纵向对称面为基准度量,范围为-20°~20°。
无动力舵面铰链力矩测量:实际运行速压2750Pa、对应名义风速70m/s,基于全机模型平均气动弦长的试验雷诺数为2.37×106。
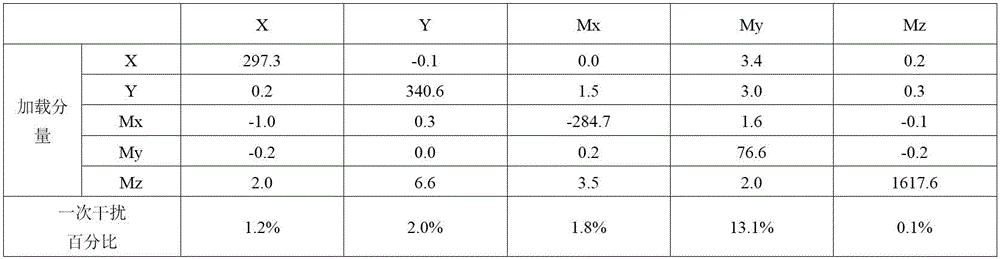
带动力舵面铰链力矩测量:对各分量进行测量,如下表3所示:
表3 带动力舵面铰链力矩测量数据
具体测量包括:
A.有、无动力副翼铰链力矩测量(左、右副翼同偏);
B.有、无动力升降舵铰链力矩测量;
C.有、无动力方向舵铰链力矩测量(前、后方向舵同时偏转,且角度相同)。
进一步的,通过安装在全机模型上的16台特种试验天平分别测量副翼、升降舵、方向舵所受的力和力矩,测量结果经数据采集系统进入计算机进行处理和输出。模型迎角及侧滑角由特大攻角试验装置的悬臂系统实现,迎角测量通过模型内部的迎角传感器实现。试验结果实时处理、显示和存储。
试验数据由PXI系统采集。数据采集按常规方式进行,采样方式为:采样前延时5s、采样时间6s、采样频率每通道为500Hz。
其中,数据采集包括:
建立有限元分析模型:在SolidWorks软件中建立天平的三维实体模型并划分网格,其中天平元件采用网格控制技术细化网格,单元大小1mm,比率1.5。
添加边界条件:有限元分析分五个工况进行,在天平力矩参考中心加载Fx、Fy、Mx、My、Mz,得到天平测量元件的应变云图。
进行有限元仿真计算:应变天平测量电路采用惠斯顿全桥电路,直流恒压源激励。
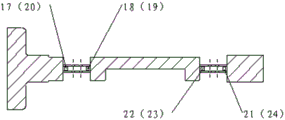
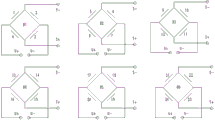
WXQL天平组桥方案如图3-1、图3-2及图3-3所示,图3-1及图3-2为所述风洞集群特种天平在不同角度上的结构示意图,其中指出构成电桥的不同应变片的所在位置,图3-3为不同电桥的电路示意图,图中1至24代表不同应变片(部分附图标记写在括号中,表示括号中标记的应变片在同一位置被遮挡),应变片选用ZF200-2AA常温应变计,共计6个电桥,B1/B2/B3/B4每个电桥由4片应变计组成,测量Fy/Mz/Mx分量;B5/B6每个电桥由4片应变计组成,测量Fx/My分量。供桥电压U=6V。
NQ天平、WSQL天平与WXQL天平组桥方法相同。
基于应变天平虚拟校准的原理,组成虚拟电桥,模拟天平单元校准。“虚拟”加载校准顺序为:Fx、Fy、Mx、My、Mz,取贴片位置(距元件根部2mm)的平均应变值,可得到各分量的主项输出应变和一次干扰输出应变(干扰应变取绝对值相加)。
天平各分量输出电压信号计算公式(1)如下:
其中: 为电桥的输出信号,mV;K为应变片的灵敏系数,K=2;U为电桥激励电压,mV;n为电桥组数;
为电桥的输出信号,mV;K为应变片的灵敏系数,K=2;U为电桥激励电压,mV;n为电桥组数; 为电桥平均输出应变。
为电桥平均输出应变。
通过有限元仿真计算,确定天平测量元件在载荷作用下应变计粘贴处沿应变计丝栅方向的应变,即可获得天平各分量的输出信号,进而得到天平各分量信号输出结果。
数据处理方法:
对各特种试验天平数据进行模型迎角修正、速压修正、操纵面偏角修正后以操纵面体轴系输出数据,结果以无量纲系数给出。
其中,数据无量纲化通过以下公式(2)获得:
其中,CN为法向力系数,Yt为操纵面法向力,q为试验速压,S为操纵面铰链线后面积,CA为轴向力系数,Xt为操纵面轴向力,Ch为铰链力矩系数,Cn为偏航力矩,Cl为滚转力矩系数,Mzt为操纵面铰链力矩,Myt为绕操纵面体轴系Y轴的力矩,Mxt为绕操纵面体轴系X轴的力矩,cA为操纵面铰链线后平均气动弦长。
下面对实验中的轴系作简单定义:
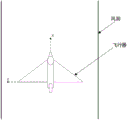
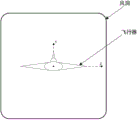
副翼特种试验天平轴系:与副翼特种试验天平固连,原点OT为校准中心,左侧副翼XT轴与副翼转轴平行(指向模型左侧),YT轴垂直副翼0°时的弦平面指向下,ZT轴垂直转轴指向后,指向符合右手定则;右侧副翼XT轴与副翼转轴平行(指向模型右侧),YT轴垂直副翼0°时的弦平面指向下,ZT轴垂直转轴指向前,指向符合右手定则。请参考图4-1及图4-2,两图均为飞行器在风洞内的示意图,其中,图4-1为沿风洞轴线的截面图,图4-2为垂直于风洞轴线的截面图,飞行器头部朝向纸面外侧,飞行器模型上为正y,机头方向为正x,顺着机翼如图方向(左翼)为正z。
升降舵特种试验天平轴系:与升降舵特种试验天平固连,原点OT为校准中心,左侧升降舵XT轴与升降舵转轴平行(指向模型左侧),YT轴垂直升降舵0°时的弦平面指向上,ZT轴垂直转轴指向前,指向符合右手定则;右侧升降舵XT轴与升降舵转轴平行(指向模型右侧),YT轴垂直升降舵0°时的弦平面指向上,ZT轴垂直转轴指向后,指向符合右手定则。
方向舵特种试验天平轴系方向舵特种试验天平固连,原点OT为校准中心:
左外上后和左外下后方向舵的XT轴与方向舵转轴平行(指向模型下方),YT轴垂直方向舵0°时的弦平面指向模型右侧,ZT轴垂直转轴指向后,指向符合右手定则;
右外上后方向舵的XT轴与方向舵转轴平行(指向模型下方),YT轴垂直方向舵0°时的弦平面指向模型左侧,ZT轴垂直转轴指向前,指向符合右手定则;
右外下后、左内后、右内后方向舵的XT轴与方向舵转轴平行(指向模型上方),YT轴垂直方向舵0°时的弦平面指向模型左侧,ZT轴垂直转轴指向后,指向符合右手定则;
左内前、右内前、左外上前、右外上前、右外下前方向舵的XT轴与方向舵转轴平行(指向模型上方),ZT轴垂直方向舵0°时的弦平面指向模型右侧,YT轴垂直转轴指向后,指向符合右手定则;
左外下前方向舵的XT轴与方向舵后舵转轴平行(指向模型下方),ZT轴垂直方向舵0°时弦平面指向模型左侧,YT轴垂直转轴指向后,指向符合右手定则。
操纵面体轴系:分别与各操纵面固连,原点Ot在操纵面铰链线上、位于铰链轴与舵面端面交点的中点处,Xt轴在操纵面弦平面内,与铰链线垂直,指向模型前方为正;Yt轴垂直操纵面弦平面,指向上表面为正(方向舵指向右表面为正,顺航向看);Zt轴与铰链线重合,按右手直角坐标系法则确定,指向右为正(方向舵指向下为正);力矩正负号由右手法则确定。
其中,采用最小二乘法求取气动导(系)数,操纵面气动系数对操纵面偏角的导数按照名义偏角进行求导。方向舵、副翼效率求导范围-10°~10°,升降舵效率求导范围-15°~15°。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其它实施例的不同之处,各个实施例之间相同或相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
需要说明的是,在本说明书中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
Claims (10)
1.一种风洞集群特种天平,其特征在于,包括固定框、浮动框、刚性梁及消扰梁;
所述固定框包括预制凹槽,所述刚性梁及所述消扰梁将所述浮动框串在所述预制凹槽中;所述刚性梁及所述消扰梁沿天平轴向排列,且所述消扰梁分布在所述刚性梁两侧;
所述消扰梁的刚度各向异性,所述消扰梁在所述天平轴向方向上的刚度小于天平法向方向上的刚度,且小于所述刚性梁的刚度。
2.如权利要求1所述的风洞集群特种天平,其特征在于,所述消扰梁为消扰铰链。
3.如权利要求2所述的风洞集群特种天平,其特征在于,所述消扰铰链为双圆弧铰链。
4.如权利要求1所述的风洞集群特种天平,其特征在于,所述固定框为翼型框;
所述翼型框与翼面基座组成待测翼面。
5.如权利要求1所述的风洞集群特种天平,其特征在于,所述浮动框包括固定卡槽;
所述浮动框通过所述固定卡槽与待测结构相连。
6.如权利要求1至5任一项所述的风洞集群特种天平,其特征在于,所述预制凹槽包括近端侧与远端侧;所述远端侧与所述固定框的根部之间包括调整狭缝;
所述调整狭缝沿天平轴向方向开口,使测量过程中其他分量对主分量的耦合干扰小于第一阈值。
7.如权利要求6所述的风洞集群特种天平,其特征在于,所述第一阈值的范围为5%至15%,包括端点值。
8.如权利要求7所述的风洞集群特种天平,其特征在于,调整区的宽度与所述近端侧的宽度的比值范围为0.4至0.8,包括端点值;所述调整区为所述调整狭缝与所述预制凹槽的远端侧之间的区域。
9.一种集群测量的风洞系统,其特征在于,包括如权利要求1至8任一项所述的风洞集群特种天平。
10.如权利要求9所述的集群测量的风洞系统,其特征在于,所述集群测量的风洞系统包括多个所述风洞集群特种天平,所述风洞集群特种天平被分类为母天平及子天平;
所述母天平的固定框与翼面基座固定连接;所述子天平的固定框与对应的母天平的浮动框固定连接。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202310501706.5A CN116242577B (zh) | 2023-05-06 | 2023-05-06 | 一种风洞集群特种天平及集群测量的风洞系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202310501706.5A CN116242577B (zh) | 2023-05-06 | 2023-05-06 | 一种风洞集群特种天平及集群测量的风洞系统 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN116242577A true CN116242577A (zh) | 2023-06-09 |
| CN116242577B CN116242577B (zh) | 2023-07-07 |
Family
ID=86624568
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202310501706.5A Active CN116242577B (zh) | 2023-05-06 | 2023-05-06 | 一种风洞集群特种天平及集群测量的风洞系统 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN116242577B (zh) |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008537592A (ja) * | 2005-03-07 | 2008-09-18 | エムティエス・システムズ・コーポレーション | 力変換器およびこれを含む台秤 |
| JP2013024714A (ja) * | 2011-07-21 | 2013-02-04 | Techno Omi Co Ltd | 計測装置 |
| CN105115694A (zh) * | 2015-07-21 | 2015-12-02 | 中国空气动力研究与发展中心高速空气动力研究所 | 一种片式铰链力矩天平 |
| JP2017166870A (ja) * | 2016-03-14 | 2017-09-21 | 三菱重工業株式会社 | 風洞試験用天秤及び風洞試験装置 |
| US20180038766A1 (en) * | 2015-03-05 | 2018-02-08 | Maha-Aip Gmbh & Co. Kg | Multiple configuration wind tunnel balance and method for converting the wind tunnel balance |
| CN108181083A (zh) * | 2018-01-16 | 2018-06-19 | 中国空气动力研究与发展中心超高速空气动力研究所 | 应用于低密度风洞的小量程高升阻比测力天平 |
| CN109540670A (zh) * | 2018-12-05 | 2019-03-29 | 东华大学 | 一种变支点测束纤维拉压应力的机构及用途 |
| CN111504596A (zh) * | 2020-04-07 | 2020-08-07 | 中国空气动力研究与发展中心低速空气动力研究所 | 一种铰链力矩天平 |
| CN113804096A (zh) * | 2021-09-02 | 2021-12-17 | 苏州大学 | 一种各向异性碳复合纤维柔性应变传感器及其制备方法和应用 |
| CN113834626A (zh) * | 2021-08-27 | 2021-12-24 | 中国空气动力研究与发展中心高速空气动力研究所 | 一种载荷不匹配的六分量大力矩天平 |
| CN115144151A (zh) * | 2022-08-31 | 2022-10-04 | 中国航空工业集团公司沈阳空气动力研究所 | 一种用于小滚转力矩测量的杆式铰链力矩天平及测量方法 |
| EP4119908A1 (de) * | 2021-07-13 | 2023-01-18 | Technische Universität Ilmenau, Körperschaft des Öffentlichen Rechts | Elektromagnetisch kompensierende balkenwaage |
-
2023
- 2023-05-06 CN CN202310501706.5A patent/CN116242577B/zh active Active
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008537592A (ja) * | 2005-03-07 | 2008-09-18 | エムティエス・システムズ・コーポレーション | 力変換器およびこれを含む台秤 |
| JP2013024714A (ja) * | 2011-07-21 | 2013-02-04 | Techno Omi Co Ltd | 計測装置 |
| US20180038766A1 (en) * | 2015-03-05 | 2018-02-08 | Maha-Aip Gmbh & Co. Kg | Multiple configuration wind tunnel balance and method for converting the wind tunnel balance |
| CN105115694A (zh) * | 2015-07-21 | 2015-12-02 | 中国空气动力研究与发展中心高速空气动力研究所 | 一种片式铰链力矩天平 |
| JP2017166870A (ja) * | 2016-03-14 | 2017-09-21 | 三菱重工業株式会社 | 風洞試験用天秤及び風洞試験装置 |
| CN108181083A (zh) * | 2018-01-16 | 2018-06-19 | 中国空气动力研究与发展中心超高速空气动力研究所 | 应用于低密度风洞的小量程高升阻比测力天平 |
| CN109540670A (zh) * | 2018-12-05 | 2019-03-29 | 东华大学 | 一种变支点测束纤维拉压应力的机构及用途 |
| CN111504596A (zh) * | 2020-04-07 | 2020-08-07 | 中国空气动力研究与发展中心低速空气动力研究所 | 一种铰链力矩天平 |
| EP4119908A1 (de) * | 2021-07-13 | 2023-01-18 | Technische Universität Ilmenau, Körperschaft des Öffentlichen Rechts | Elektromagnetisch kompensierende balkenwaage |
| CN113834626A (zh) * | 2021-08-27 | 2021-12-24 | 中国空气动力研究与发展中心高速空气动力研究所 | 一种载荷不匹配的六分量大力矩天平 |
| CN113804096A (zh) * | 2021-09-02 | 2021-12-17 | 苏州大学 | 一种各向异性碳复合纤维柔性应变传感器及其制备方法和应用 |
| CN115144151A (zh) * | 2022-08-31 | 2022-10-04 | 中国航空工业集团公司沈阳空气动力研究所 | 一种用于小滚转力矩测量的杆式铰链力矩天平及测量方法 |
Non-Patent Citations (1)
| Title |
|---|
| 张静言等: "霍尔天平材料的多场调控", 《物理学报》, vol. 70, no. 4, pages 7 - 27 * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN116242577B (zh) | 2023-07-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111504596B (zh) | 一种铰链力矩天平 | |
| CN110940484B (zh) | 用于高速飞翼模型大攻角下的滚转强迫振动动导数试验装置 | |
| CN102901595B (zh) | 一种舵面铰链力矩测量方法 | |
| US20180335364A1 (en) | Wind tunnel balance and method of use | |
| CN111638033A (zh) | 一种风洞模型支撑干扰测力试验结构装置 | |
| WO2021051950A1 (zh) | 多维力传感器的负载平台微位移测量方法及测量敏感元件的安装方法 | |
| CN203037441U (zh) | 单分量杆式低速铰链力矩测量装置 | |
| CN103630285B (zh) | 临近空间飞行器rcs喷流干扰力与干扰力矩测量装置 | |
| CN108896269A (zh) | 一种高精度轴向力测量风洞应变天平 | |
| CN102680201A (zh) | 基于视频测量的抖振风洞试验方法 | |
| CN111473945A (zh) | 一种六分量环式天平 | |
| CN103969021A (zh) | 飞机螺旋桨推力与扭矩测量天平 | |
| JP2003113769A (ja) | ブレードピッチ角度制御装置および風力発電装置 | |
| CN104849016B (zh) | 一种微量风洞天平及其测试方法 | |
| CN110823505B (zh) | 一种用于民机高速风洞试验的高精度阻力天平 | |
| CN116242577B (zh) | 一种风洞集群特种天平及集群测量的风洞系统 | |
| CN205209733U (zh) | 一种力矩测量天平 | |
| CN106768791A (zh) | 一种微量风洞天平 | |
| Zelenka et al. | Wind tunnel measurements of the Prandtl-D research aircraft in preparation for a stereoscopic particle image velocimetry flow survey | |
| CN112098038B (zh) | 一种三维风作用下刚体模型多点同步测力方法 | |
| CN116659804B (zh) | 一种高速风洞减速伞测力天平 | |
| Fouda et al. | Effect of Wing Planform on Airplane Stability and Control Authority in Stall | |
| CN111891384A (zh) | 一种仿鸟扑翼飞行器测试装置及其测试方法 | |
| CN116481759A (zh) | 一种风洞内模型瞬态力测量系统 | |
| CN107290124B (zh) | 一种脉冲燃烧风洞悬挂式测力系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |