CN201730962U - 五自由度永磁偏置磁轴承 - Google Patents
五自由度永磁偏置磁轴承 Download PDFInfo
- Publication number
- CN201730962U CN201730962U CN2010201741183U CN201020174118U CN201730962U CN 201730962 U CN201730962 U CN 201730962U CN 2010201741183 U CN2010201741183 U CN 2010201741183U CN 201020174118 U CN201020174118 U CN 201020174118U CN 201730962 U CN201730962 U CN 201730962U
- Authority
- CN
- China
- Prior art keywords
- stator
- axial
- magnetic
- permanent magnet
- magnetic pole
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images

Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C32/00—Bearings not otherwise provided for
- F16C32/04—Bearings not otherwise provided for using magnetic or electric supporting means
- F16C32/0406—Magnetic bearings
- F16C32/044—Active magnetic bearings
- F16C32/0459—Details of the magnetic circuit
- F16C32/0461—Details of the magnetic circuit of stationary parts of the magnetic circuit
- F16C32/0465—Details of the magnetic circuit of stationary parts of the magnetic circuit with permanent magnets provided in the magnetic circuit of the electromagnets
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C32/00—Bearings not otherwise provided for
- F16C32/04—Bearings not otherwise provided for using magnetic or electric supporting means
- F16C32/0406—Magnetic bearings
- F16C32/044—Active magnetic bearings
- F16C32/0474—Active magnetic bearings for rotary movement
- F16C32/0489—Active magnetic bearings for rotary movement with active support of five degrees of freedom, e.g. two radial magnetic bearings combined with an axial bearing
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Magnetic Bearings And Hydrostatic Bearings (AREA)
Abstract
本实用新型提供了一种五自由度永磁偏置磁轴承,包括定子组件和转子组件,定子组件上的径向定子磁极和轴向定子磁极分别与转子组件上的磁极一一对应的设置,所述定子组件位于转子组件的外侧,包括,沿定子组件轴向方向依次布置的一个径向定子,一个轴向定子,一个径向定子;所述转子组件包括一转子轴和套装在转子轴上的转子软铁。本实用新型简化了转子结构,装配方便,在径向定子磁极上开槽,消耗功率低。
Description
技术领域
本实用新型涉及一种五自由度永磁偏置磁轴,特别涉及一种适用于无轴承电机和高速飞轮储能系统等机械设备中旋转部件的无轴承支承的五自由度永磁偏置磁轴。
背景技术
磁轴承又称磁悬浮轴承,是利用磁力作用将转子悬浮于空中,使转子与定子之间没有机械接触,即在转子和定子之间形成一定距离的空气间隙(简称气隙),所以磁悬浮轴承的转子可以达到很高的转速,并且没有机械磨损、无需润滑、能耗低、无污染等优点,特别适用于高速、真空和超洁净的应用场合。
目前,磁轴承按照磁力提供的方式可以分为以下几种:第一种是主动磁悬浮轴承,这种磁轴承线圈中存在偏置电流,以提供偏置磁场,由控制电流流经控制绕组产生的控制磁通进行叠加,从而产生可控的磁浮力,体积、重量和功耗都比较大。第二种是被动磁轴承,这种磁轴承的悬浮力完全由永磁提供,其所需的控制器简单,悬浮功耗小,但是刚度和阻尼都比较小,一般运用于仅在一个方向支承物体或者是减轻作用在传统轴承上的负荷。第三种是混合磁轴承,这种磁轴承采用永磁材料替代主动磁轴承中的电磁铁来产生偏置磁场,电磁铁提供的只是平衡负载或干扰的控制磁场,大大降低了因偏置电流产生的功率损耗,电磁铁所需的安匝数只是主动磁轴承的一半,缩小了吃轴承的体积,减轻了其重量,并提高了承载能力。
目前对五自由度永磁偏置磁轴承的研究主要有以下几种:一种是采用单独的轴向磁轴承和径向磁轴承的组合来实现五自由度的支承,这种方式使得整个轴向尺寸较长。另一种是将径向和轴向磁轴承集成在一起,但是转子结构复杂,转动惯量大,定子径向尺寸也较大,装配困难;轴向控制无被动刚度,消耗功率大;有些径向主动控制的磁路不能形成闭合回路,因此消耗功率较大。
实用新型内容
本实用新型的目的在于解决上述的技术问题,提供一种适用于无轴承电机和高速飞轮储能系统等机械设备中旋转部件的无轴承支承的五自由度永磁偏置磁轴。
本实用新型的目的通过以下技术方案来实现:一种五自由度永磁偏置磁轴承,包括定子组件和转子组件,其特征在于:定子组件上的径向定子磁极和轴向定子磁极分别与转子组件上的磁极一一对应的设置。
进一步地,所述定子组件位于转子组件的外侧,包括,沿定子组件轴向方向依次布置的一个径向定子,一个轴向定子,一个径向定子,各个径向定子向转子组件方向径向延伸出四个径向定子磁极,相对的一对径向定子磁极偏置磁场方向相反,每个径向定子磁极上安装有一径向控制线圈,在相对的一对径向定子磁极上的径向控制线圈相串联。
进一步地,各个径向定子磁极上均开有一个或多个槽。
进一步地,轴向定子在转子组件轴向方向上位于两个径向定子之间,其轴向方向的两端各自连接一个永磁铁,两个永磁铁在轴向的充磁方向是相反的。
进一步地,两个径向定子分别对称的设于轴向定子的两端,其内表面与永磁铁的外表面贴在一起。
进一步地,轴向定子具有两个在定子组件轴向方向上间隔布置的轴向定子磁极,两个轴向定子磁极之间形成一个槽,槽中设有轴向控制线圈。
进一步地,所述转子组件包括一转子轴和套装在转子轴上的转子软铁。
进一步地,所述转子软铁在轴向分布四个磁极,分别与定子组件上的磁极相对应。
进一步地,各个径向定子磁极上均开有一个或多个槽,所述转子软铁上与径向定子磁极相对应的磁极上开有相同数量的槽。
进一步地,转子软铁上与轴向定子磁极相对应的磁极在定子组件轴向方向上错开2/3磁极厚度设置。
本实用新型的有益效果主要体现在:简化了转子结构,装配方便,在径向定子磁极上开槽,消耗功率低。
附图说明
下面结合附图对本实用新型技术方案作进一步说明:
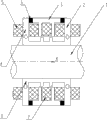
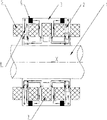
图1:本实用新型的优选实施方式的结构示意图。
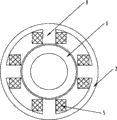
图2:本实用新型的优选实施方式的图1的结构示意图的左视图。
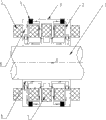
图3:本实用新型的优选实施方式的偏置磁场原理图
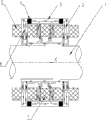
图4:本实用新型的优选实施方式的径向磁浮控制磁路原理图。
图5:本实用新型的优选实施方式的轴向磁浮控制磁路原理图。
图6:本实用新型的优选实施方式的扭转磁浮控制磁路原理图。
其中:
1 转子轴 5 径向控制线圈
2 径向定子 6 转子软铁
3 轴向定子 7 轴向控制线圈
4 永磁铁 8 径向定子磁极
具体实施方式
有关本实用新型之前述及其他技术内容、特点与功效,在以下配合参考图式之一较佳实施例的详细说明中,将可清楚的呈现。
图1为本实用新型的一种具体实施方式的五自由度永磁偏置磁轴承示意图,图2为图1的左视图,结合图1和图2。该五自由度永磁偏置磁轴承主要由定子组件和转子组件组成,转子组件包括转子轴1,转子的轴向轴线为X轴,该轴线同时为转子组件的轴向轴线、转子软铁6;定子组件包括两个径向定子2、一个轴向定子3、两个轴向充磁的环形永磁铁4以及径向控制线圈5和轴向控制线圈7组成。径向定子2、轴向定子3和转子软铁由较高导磁性能的软磁材料加工而成;环形永磁铁4由高饱和磁感应强度的钕铁硼材料加工而成。
具体的,转子轴1的外侧,沿X轴方向布置依次有一个径向定子2,一个轴向定子3,一个径向定子2。径向定子2为环形,其环内向转子轴1方向径向延伸出四个径向定子磁极8,四个径向定子磁极8分别位于在径向定子2的圆周上的四等分点上,同时位于X轴方向上的统一轴向位置,相对的一对径向定子磁极8磁场方向相反。径向控制线圈5分别安装在径向定子2的四个径向定子磁极8上,在相对的一对径向定子磁极8上的径向控制线圈5相串联。各个径向定子磁极8上均开有一个或多个槽,两个径向定子2共有八个径向定子磁极8,每个径向定子磁极8上设有一个径向控制线圈5,即共设有八个径向控制线圈5。
轴向定子3在X轴方向上位于两个径向定子2之间,其X轴向方向的两端各自连接一个环形永磁铁4,这两个环形永磁铁4在轴向的充磁方向是相反的,两个径向定子2分别对称的放在轴向定子3的两端,其内表面与环形永磁铁4的外表面贴在一起。轴向定子3具有两个在X轴轴向方向上间隔布置的轴向定子磁极,两个轴向定子磁极之间形成一个环形的槽,轴向控制线圈7放在这个环形的槽中。
转子软铁6套装在转子轴1上,转子软铁6的上和轴向定子3和径向定子2的各磁极相对应的设置有转子磁极。和径向定子磁极8相对应的转子磁极在稳定状态下的X轴轴向位置和径向电子磁极8的X轴轴向位置相同,直径相同,且该转子磁极上开有和径向电子磁极8位置和形状相对应的槽。和轴向定子磁极相对应的转子磁极的直径轴向定子磁极的直径相同,然而其X轴轴向位置彼此错开了三分之二个磁极厚度,该转子磁极的X轴轴向位置向两个轴向定子磁极之间的对称轴线方向偏移。这样在相同的安匝数情况下产生的轴向力最大。
图3为永磁铁产生的偏置磁场原理图。图中所示的磁力线是由永磁铁4产生的,主要用来建立静态偏置磁场。
参照图3和图4,转子轴1在径向平衡位置时,由于结构的对称性,环形永磁铁4在径向气隙中产生的磁感应强度大小是相同的,此时转子轴1受到的上下的吸力是相等的。此时如果转子轴1受到向下的干扰力,转子轴1将偏离平衡位置,向下有一个小的位移,这样将造成上下径向气隙中产生的磁感应强度发生变化,即下面气隙减小,磁感应强度增大;上面气隙增大,磁感应强度减小。由于在磁极面积一定时磁力与磁感应强度的平方成正比,因此下面的吸力大于上面的吸力,在加入控制电流前,转子将无法回到平衡位置。此时,设在转子左右两端的径向位移传感器(图未示)将检测出转子轴1偏移参考位置的位移量,一个控制器将这一位移信号转化为控制信号,然后经一个功率放大器转化为控制电流通入上下各个径向定子磁极8上相串联的线圈中,从而产生如图4所示的控制磁场。电磁场产生的磁感应强度在上面的径向气隙中是叠加增强的,在下面气隙中是叠加减弱的,此时在上面气隙中产生的磁力将大于下面气隙中的磁力,产生上面气隙的磁力大于下面气隙的磁力,即转子轴1将受到一个向上的合外力,使转子轴1能够被拉回到平衡位置处。
参照图3和图5,在轴向方向上,刚度主要由永磁铁4产生的磁场提供,电磁场主要用来调整轴向的位置,耗电较小。在径向定子磁极8上开一个或多个槽,利用磁势最小的原理,这样可以大大提高轴向的被动刚度。当转子轴1在轴向平衡位置时,由于结构的对称性,转子轴1在轴向是不受力的。当转子轴1受到向左的干扰力时,由于在轴向有较大的被动刚度,转子轴1的产生的位置偏移量将很小,此时轴向定子左边的轴向定子磁极产生的永磁力将小于右边轴向定子磁极产生的永磁力,有将转子拉回到平衡位置的趋势。轴向传感器(图未示)检测到的位移信号将通过控制器,功率放大器转换为控制电流通入轴向控制线圈,而产生如图5所示轴向控制电磁场。在右边的磁极气隙中,电磁场将和永磁场叠加增强;在左边的磁极气隙中,电磁场将和永磁场叠加减弱,这样更增大了转子轴向回复力,并且消耗的功率较小。
参照图3和图6,当转子轴1在平衡位置时,转子轴1是不受扭矩的。假设当转子受到一个干扰,产生了绕垂直于X轴的轴线的偏转(沿图中的顺时针方向扭转),此时径向定子磁极8和轴向定子磁极与对应的转子磁极将产生一个错位,根据磁势最小的原理,此时将产生一个逆时针的回复力矩,产生使转子回复到平衡位置的趋势,在此基础上在左右两端相对应的线圈中分别通入相反的控制电流(产生的电磁磁力线如图6中虚线所示),即可较容易的将转子轴1拉回到平衡位置。以上即是五自由度磁悬浮控制的原理。
本实用新型的五自由度永磁偏置磁轴承,利用了两个轴向充磁的环形永磁铁来提供静态偏置磁场,并提供轴向的被动刚度和绕垂直于定子组件的轴向轴线的被动扭转刚度,有效的降低了功率的消耗。整个装置结构简单、紧凑,安装方便。本实用新型的转子具有一样的外径,进而实现轴向的磁悬浮控制,简化了转子的结构,方面了轴承的装配。本实用新型的轴向定子磁极与相对应得转子磁极错开一定的距离,此距离为磁极厚度的三分之二,在同样的安匝数情况下产生的轴向力最大。本实用新型在径向定子磁极上开槽,利用磁势最小的原理而使轴向和扭转方向产生更大的被动刚度,从而使轴向和扭转方向更易控制,消耗的功率更低。本方明采用磁导率高的软磁材料,可以大大减小轴承的整体结构尺寸,能够在微型电机上应用。本实用新型实现了五自由度的磁悬浮。
尽管为示例目的,已经公开了本实用新型的优选实施方式,但是本领域的普通技术人员将意识到,在不脱离由所附的权利要求书公开的本实用新型的范围和精神的情况下,各种改进、增加以及取代是可能的。
Claims (10)
1.一种五自由度永磁偏置磁轴承,包括定子组件和转子组件,其特征在于:定子组件上的径向定子磁极和轴向定子磁极分别与转子组件上的磁极一一对应的设置。
2.根据权利要求1所述的五自由度永磁偏置磁轴承,其特征在于,所述定子组件位于转子组件的外侧,包括,沿定子组件轴向方向依次布置的一个径向定子,一个轴向定子,一个径向定子,各个径向定子向转子组件方向径向延伸出四个径向定子磁极,相对的一对径向定子磁极偏置磁场方向相反,每个径向定子磁极上安装有一径向控制线圈,在相对的一对径向定子磁极上的径向控制线圈相串联。
3.根据权利要求2所述的五自由度永磁偏置磁轴承,其特征在于,各个径向定子磁极上均开有一个或多个槽。
4.根据权利要求2所述的五自由度永磁偏置磁轴承,其特征在于,轴向定子在转子组件轴向方向上位于两个径向定子之间,其轴向方向的两端各自连接一个永磁铁,两个永磁铁在轴向的充磁方向是相反的。
5.根据权利要求4所述的五自由度永磁偏置磁轴承,其特征在于,两个径向定子分别对称的设于轴向定子的两端,其内表面与永磁铁的外表面贴在一起。
6.根据权利要求2所述的五自由度永磁偏置磁轴承,其特征在于,轴向定子具有两个在定子组件轴向方向上间隔布置的轴向定子磁极,两个轴向定子磁极之间形成一个槽,槽中设有轴向控制线圈。
7.根据权利要求1所述的五自由度永磁偏置磁轴承,其特征在于,所述转子组件包括一转子轴和套装在转子轴上的转子软铁。
8.根据权利要求7所述的五自由度永磁偏置磁轴承,其特征在于,所述转子软铁在轴向分布四个磁极,分别与定子组件上的磁极相对应。
9.根据权利要求8所述的五自由度永磁偏置磁轴承,其特征在于,各个径向定子磁极上均开有一个或多个槽,所述转子软铁上与径向定子磁极相对应的磁极上开有相同数量的槽。
10.根据权利要求8所述的五自由度永磁偏置磁轴承,其特征在于,转子软铁上与轴向定子磁极相对应的磁极在定子组件轴向方向上错开2/3磁极厚度设置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2010201741183U CN201730962U (zh) | 2010-04-29 | 2010-04-29 | 五自由度永磁偏置磁轴承 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2010201741183U CN201730962U (zh) | 2010-04-29 | 2010-04-29 | 五自由度永磁偏置磁轴承 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN201730962U true CN201730962U (zh) | 2011-02-02 |
Family
ID=43522120
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2010201741183U Expired - Lifetime CN201730962U (zh) | 2010-04-29 | 2010-04-29 | 五自由度永磁偏置磁轴承 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN201730962U (zh) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101806323A (zh) * | 2010-04-29 | 2010-08-18 | 苏州同心医疗器械有限公司 | 五自由度永磁偏置磁轴承 |
| CN102322481A (zh) * | 2011-08-31 | 2012-01-18 | 北京航空航天大学 | 一种三自由度径向解耦锥形磁轴承 |
| CN104989727A (zh) * | 2015-06-05 | 2015-10-21 | 中国人民解放军国防科学技术大学 | 一种组合式五自由度电磁轴承 |
| WO2016137775A1 (en) * | 2015-02-26 | 2016-09-01 | Carrier Corporation | Magnetic bearing |
| CN110645269A (zh) * | 2019-08-20 | 2020-01-03 | 江苏理工学院 | 一种自悬浮轴向磁悬浮轴承 |
| US10927892B2 (en) | 2015-02-26 | 2021-02-23 | Carrier Corporation | Magnetic thrust bearing |
| US11028877B2 (en) | 2017-04-01 | 2021-06-08 | Carrier Corporation | Magnetic radial bearing with flux boost |
| US11035406B2 (en) | 2017-04-01 | 2021-06-15 | Carrier Corporation | Magnetic radial bearing with flux boost |
| US11047421B2 (en) | 2017-04-01 | 2021-06-29 | Carrier Corporation | Magnetic radial bearing with flux boost |
-
2010
- 2010-04-29 CN CN2010201741183U patent/CN201730962U/zh not_active Expired - Lifetime
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101806323A (zh) * | 2010-04-29 | 2010-08-18 | 苏州同心医疗器械有限公司 | 五自由度永磁偏置磁轴承 |
| CN102322481A (zh) * | 2011-08-31 | 2012-01-18 | 北京航空航天大学 | 一种三自由度径向解耦锥形磁轴承 |
| CN102322481B (zh) * | 2011-08-31 | 2013-03-20 | 北京航空航天大学 | 一种三自由度径向解耦锥形磁轴承 |
| US10767691B2 (en) | 2015-02-26 | 2020-09-08 | Carrier Corporation | Magnetic bearing |
| WO2016137775A1 (en) * | 2015-02-26 | 2016-09-01 | Carrier Corporation | Magnetic bearing |
| US10927892B2 (en) | 2015-02-26 | 2021-02-23 | Carrier Corporation | Magnetic thrust bearing |
| CN104989727A (zh) * | 2015-06-05 | 2015-10-21 | 中国人民解放军国防科学技术大学 | 一种组合式五自由度电磁轴承 |
| CN104989727B (zh) * | 2015-06-05 | 2017-05-24 | 中国人民解放军国防科学技术大学 | 一种组合式五自由度电磁轴承 |
| US11028877B2 (en) | 2017-04-01 | 2021-06-08 | Carrier Corporation | Magnetic radial bearing with flux boost |
| US11035406B2 (en) | 2017-04-01 | 2021-06-15 | Carrier Corporation | Magnetic radial bearing with flux boost |
| US11047421B2 (en) | 2017-04-01 | 2021-06-29 | Carrier Corporation | Magnetic radial bearing with flux boost |
| CN110645269A (zh) * | 2019-08-20 | 2020-01-03 | 江苏理工学院 | 一种自悬浮轴向磁悬浮轴承 |
| CN110645269B (zh) * | 2019-08-20 | 2020-09-15 | 江苏理工学院 | 一种自悬浮轴向磁悬浮轴承 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN201730962U (zh) | 五自由度永磁偏置磁轴承 | |
| CN101149077B (zh) | 永磁偏置轴向径向磁轴承 | |
| CN101806323A (zh) | 五自由度永磁偏置磁轴承 | |
| CN101235848B (zh) | 低损耗永磁偏置轴向径向磁轴承 | |
| CN101581336B (zh) | 永磁偏置轴向磁悬浮轴承 | |
| CN101696713B (zh) | 一种永磁上吸下斥结构的低功耗内转子径向磁轴承 | |
| CN102072249B (zh) | 一种大承载力径向磁轴承 | |
| CN106958589B (zh) | 具有阻尼作用的Halbach永磁被动式轴向磁悬浮轴承 | |
| CN101737425B (zh) | 一种低功耗单稳态零重力作用径向磁轴承 | |
| CN102434587A (zh) | 具有被动阻尼作用的永磁被动式轴向磁悬浮轴承 | |
| CN101761574A (zh) | 一种永磁上吸下斥结构的低功耗外转子径向磁轴承 | |
| CN111425523A (zh) | 一种混合式径向永磁偏置磁轴承 | |
| CN107070072A (zh) | 一种五自由度磁悬浮飞轮储能装置 | |
| CN102480175A (zh) | 一种无轴承悬浮转子永磁电机 | |
| CN107769622A (zh) | 一种径向磁悬浮式电机 | |
| CN101158375B (zh) | 低损耗的永磁偏置径向磁轴承 | |
| CN101526107A (zh) | 永磁体位于转子上的混合型轴向磁轴承 | |
| CN104141685A (zh) | 一种主被动内转子磁轴承 | |
| CN117249163A (zh) | 一种带径向辅助励磁的三自由度混合磁轴承 | |
| CN100494707C (zh) | 三磁极的永磁偏置径向磁轴承 | |
| CN201122867Y (zh) | 一种高速磁悬浮无轴承永磁电机 | |
| CN101539167A (zh) | 一种永磁偏置轴向径向磁轴承 | |
| CN107070073A (zh) | 一种磁悬浮飞轮电池 | |
| CN101832335B (zh) | 永磁偏置轴向径向磁轴承 | |
| CN104154119A (zh) | 一种永磁偏置轴向径向磁轴承 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CX01 | Expiry of patent term |
Granted publication date: 20110202 |
|
| CX01 | Expiry of patent term |