CN213200096U - 一种涵道风扇无人飞行器 - Google Patents
一种涵道风扇无人飞行器 Download PDFInfo
- Publication number
- CN213200096U CN213200096U CN202022101399.6U CN202022101399U CN213200096U CN 213200096 U CN213200096 U CN 213200096U CN 202022101399 U CN202022101399 U CN 202022101399U CN 213200096 U CN213200096 U CN 213200096U
- Authority
- CN
- China
- Prior art keywords
- duct
- unmanned aerial
- cross stator
- propeller
- aerial vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Landscapes
- Toys (AREA)
Abstract
本实用新型提供了一种涵道风扇无人飞行器,属于飞行器技术领域。本实用新型的涵道装置中同轴反向旋转螺旋桨与两个安装到机身两侧的机翼相结合,为涵道风扇无人飞行器提供混合动力,不仅适用于垂直起降、悬停,也可用于高速水平飞行。本实用新型中,舵面安装在下十字定子下方,同时处于下螺旋桨下方,确保涵道下方的舵面能完全沉浸在涵道风扇的螺旋桨高速滑流中,实现飞行器从悬停到水平飞行的过渡。
Description
技术领域
本实用新型涉及飞行器技术领域,尤其涉及一种涵道风扇无人飞行器。
背景技术
目前飞行器有两个大分支,分别是固定翼飞行器和旋翼飞行器。我们常见的飞机属于第一个分支,可以高速水平飞行,但需要跑道才能起降。而直升机属于第二个分支。尽管它可以垂直起飞或降落并能够悬停在空中,但与飞机相比,水平飞行速度具有局限性。
常规的飞机可以高速水平飞行,但需要跑道才能起降,这意味着飞机不能在空中悬停,也不能垂直起飞或降落。而常规的直升机尽管它可以垂直起飞或降落并能够悬停在空中,但与飞机相比,水平飞行速度的局限性成为了它很难完成远程任务的真正缺陷。
无人飞行器作为近些年来发展起来的飞行器领域的新技术,是利用无线电遥控设备和自备的程序控制装置操纵的不载人的飞行器。其也分为固定翼飞行器和旋翼飞行器。因此,如何将固定翼飞机和旋翼飞机的优点进行结合,应用于无人飞行器,一直是全世界航空科学家研究的热点。
中国专利申请文献CN104290907A中,公开了一种新型混合动力垂直短距起降无人飞行器,包括机身、设置在机身上的主机翼、设置在主机翼上的升降副翼、设置在机身前部的鸭翼、设置在机身后部的垂直尾翼、设置在机身下方的起落架、油箱、蓄电池、控制系统、电源管理系统;主机翼呈三角形,升降副翼、鸭翼、垂直尾翼分别对称设置在机身的中心线两侧,机身上设置有电动涵道风扇,主机翼两侧的翼梢上分别对称设置有电动涵道风扇,电动涵道风扇正下方设置有导向舵面,电动涵道风扇呈正三角形非共面分布,机身上的电动涵道风扇所在水平面的位置低于主机翼两侧电动涵道风扇所在水平面的位置;机身呈U型,机身采用升力体机头,机身的中部固定设置有倾斜旋转机构,倾斜旋转机构上设置有发动机,发动机位于电动涵道风扇的几何中心,发动机上设置有发电系统;油箱、蓄电池分别设置在机身内,发电系统与电源管理系统相连,电源管理系统分别与控制系统、蓄电池、电动涵道风扇相连。该飞行器使用了三套电动涵道风扇外加一台中心发动机才能实现其垂直起降与悬停,只有当三套电动涵道风扇同时倾转成水平时,才能实现飞行器的水平飞行。正因为如此,三套电动涵道风扇加上一台中心发动机使得整台飞行器的重量大大的增加,从而降低了飞行的推重比,增加了耗油率及耗电率。同时三套可倾转的电动涵道风扇也使得该飞行器的整体结构变得更加复杂,从而会导致机械故障率的上升。
中国专利申请文献CN109263885A中,公开了一种涵道螺旋桨飞行器,包括:机架、涵道共轴双螺旋桨、涵道螺旋桨、涵道本体、动力系统、控制系统;机架分为上层机架和下层机架,所述上层机架和下层机架均为十字型,上层机架和所述下层机架共轴,且在十字型的交叉处均设有支撑板,下层机架的尺寸大于所述上层机架,且所述上册机架和所述下层机架是通过固定件连接;涵道共轴双螺旋桨包括上层螺旋桨和下层螺旋桨,均设置在所述支撑板上;涵道螺旋桨包括前螺旋桨、后螺旋桨、左螺旋桨和右螺旋桨,涵道螺旋桨均设置于所述下层机架上;涵道本体为圆筒形,涵道本体设置于所述下层机架上,涵道共轴双螺旋桨设置于所述涵道内;动力系统与控制系统相连,从而控制飞行器的飞行;机架还包括空心管、夹板,空心管形成十字型结构构成机架的框架,夹板的一端夹住所述固定件,另一端夹住空心管;涵道螺旋桨均设置于下层机架的空心管的末端;涵道共轴双螺旋桨与所述涵道螺旋桨上的螺旋桨的翼型均为同一翼型,螺旋桨的截面形状为CLARK-Y螺旋桨的截面形状;涵道共轴双螺旋桨的上层螺旋桨设为正桨,下层螺旋桨设为反桨;涵道螺旋的前螺旋桨和后螺旋桨设为反桨,左螺旋桨和右螺旋桨设为正桨;涵道本体的筒壁上设有环形凹槽,上层螺旋桨在环形凹槽内转动,且环形凹槽的下方设置有矩形镂空;涵道螺旋桨飞行器的动力系统包括电机、电调和锂电池;电机采用无刷电机,电调用于控制电机的转速;控制系统为开源的APM飞控板。该飞行器该飞行器可以看作是4旋翼外加一套共轴式的中心推力螺旋桨的5旋翼飞行器,它的垂直起降与悬停的姿态稳定控制完全依赖的是4个涵道外的旋翼进行的差速控制,和涵道风扇飞行器使用的舵面控制原理差距很大。这也使得该飞行器需要多套螺旋桨和电机系统才能实现垂直起降与悬停,从而增加了结构的复杂性,降低了飞行器的有效载重。由于该飞行器没有固定翼结构,因此其也不具备高速水平飞行的模式,最大飞行速度也只能达到四旋翼或者六旋翼的平飞速度。
现有技术至少存在以下不足:
1.无法同时满足既适用于垂直起降、悬停,也可用于高速水平飞行。
2.对比文件2公开的技术方案虽能实现既适用于垂直起降、悬停,但没有固定翼,最大飞行速度也低。
实用新型内容
本实用新型的目的是提供一种不仅适用于垂直起降、悬停,也可用于高速水平飞行的无人飞行器。
本实用新型提供了一种涵道风扇无人飞行器,包括:机体装置和涵道装置:
所述机体装置包括机身和两个机翼,两个所述机翼分别位于机身的两侧;
所述涵道装置包括:上十字定子、一对共轴螺旋桨、四套舵面、下十字定子和多个起落架;
所述一对共轴螺旋桨包括上螺旋桨和下螺旋桨;
所述上螺旋桨固定在所述上十字定子的中间部位;
所述下螺旋桨固定在所述下十字定子的中间部位;
涵道上表面的边缘有多个凹槽,所述上十字定子固定在所述涵道上表面边缘的凹槽内;
涵道下表面的边缘有多个空腔,所述下十字定子固定在所述涵道下表面边缘的空腔内;
四套舵面分别安装在所述下十字定子的各足的下方;
所述机身与所述上十字定子连接。
优选地,所述上螺旋桨和所述下螺旋桨旋转方向相反。
优选地,所述上螺旋桨和所述下螺旋桨分别用桨夹与电机连接,所述电机用螺栓分别与所述上十字定子和所述下十字定子固定。
优选地,每套所述舵面包括三块平行的舵板,所述下十字定子下方固定有一个方形底座,所述方形底座的四个方向均有一个轴孔,四套所述舵面分别通过转轴与所述方形底座连接,所述转轴穿过所述轴孔。
优选地,所述上十字定子与所述下十字定子的各足分别相对,所述上十字定子采用螺栓固定在所述涵道上表面边缘的凹槽内,所述下十字定子采用螺栓固定在所述涵道下表面边缘的空腔内。
优选地,所述起落架为4个,每个所述起落架分别采用螺栓固定安装在涵道下方边缘,每个所述起落架穿插安装在所述下十字定子的每两个相邻足的中间位置。
优选地,所述机翼与所述上十字定子中在同一直线上的两足平行。
优选地,使用螺钉和螺母将所述机身与所述上十字定子连接。
优选地,两个所述机翼为矩形,通过螺栓和螺母水平对称安装在所述机身的两侧。
优选地,所述机身有空腔,用于安装航空电子设备。
与现有技术相对比,本实用新型的有益效果如下:
(1)本实用新型的涵道装置中,两个同轴反向旋转螺旋桨与两个水平对称安装在机身两侧的机翼相结合,为涵道式无人飞行器提供混合动力,不仅适用于垂直起降,悬停,也可用于高速水平飞行。
(2)本实用新型的涵道装置中,下方的四个舵面分别安装在下十字定子的各足的下方,且位于涵道风扇的螺旋桨的下方,舵面能完全沉浸在涵道风扇的螺旋桨高速滑流中,使得舵面能产生足够大的姿态旋转控制力用来实现飞行器从悬停到水平飞行的过渡。
(3)本实用新型采用的舵面滑流控制方式实现的垂直起降与悬停姿态,相比起其他旋翼类飞行器,稳定控制,结构简单,维护便捷以及效率更高。
(4)本实用新型的涵道装置中,仅采用了两个螺旋桨,结构更简单。
(5)本实用新型的机体装置中,机翼为常规的矩形,水平对称安装,兼容性好,对现有技术改造小。
附图说明
图1是本实用新型的机体装置结构图;
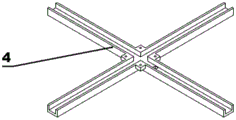
图2是本实用新型中上十字定子结构图;
图3是本实用新型中下十字定子结构图;
图4是本实用新型中舵面的结构图;
图5是本实用新型中舵面的内部结构图;
图6是本实用新型中涵道装置外部结构图;
图7是本实用新型的完整结构的俯视图;
图8是本实用新型的完整结构的正等轴侧图;
图9是本实用新型由垂直悬停模式到水平飞行模式的完整过渡过程;
图10是本实用新型由水平飞行模式到垂直悬停模式的完整过渡过程。
附图中标记的具体含义如下:
1-机身;2-机翼;3-涵道装置;4-上十字定子;5-舵面;6-起落架;7-下十字定子;8-上螺旋桨;9-下螺旋桨;10-涵道下表面边缘的空腔;11-涵道上表面边缘的凹槽;12-舵板。
具体实施方式
下面结合附图1-10,对本实用新型的具体实施方式作详细的说明。
本实用新型提供了一种涵道风扇无人飞行器,包括:机体装置和涵道装置:
所述机体装置包括机身1和两个机翼2,两个所述机翼2分别位于机身1的两侧;机翼材料应为低密度和高强度的材料,例如碳纤维,ABS或复合材料等。
所述涵道装置3包括:上十字定子4、一对共轴螺旋桨、四套舵面5、下十字定子7和多个起落架6;所述涵道可以由碳纤维制成;所述上十字定子由复合材料制成;所述下十字定子由复合材料制成;
所述一对共轴螺旋桨包括上螺旋桨8和下螺旋桨9;
所述上螺旋桨8固定在所述上十字定子4的中间部位;
所述下螺旋桨9固定在所述下十字定子7的中间部位;
涵道上表面的边缘有多个凹槽,所述上十字定子4固定在所述涵道上表面边缘的凹槽11内;
涵道下表面的边缘有多个空腔,所述下十字定子7固定在所述涵道下表面边缘的空腔10内;
四套舵面5分别安装在所述下十字定子7的各足的下方;所述舵面由EPP或者ABS材料制成;
所述机身1与所述上十字定子7连接。
作为优选实施方式,所述上螺旋桨8和所述下螺旋桨9旋转方向相反;这样螺旋桨旋转时所产生的扭矩会因为两个螺旋桨同时以相反的方向旋转而相互抵消。
作为优选实施方式,所述上螺旋桨8和所述下螺旋桨9分别用桨夹与电机连接,所述电机用螺栓分别与所述上十字定子和所述下十字定子固定。
作为优选实施方式,每套所述舵面5包括三块平行的舵板12,所述下十字定子7下方固定有一个方形底座,所述方形底座的四个方向均有一个轴孔,四套所述舵面5分别通过转轴与所述方形底座连接,所述转轴穿过所述轴孔。当螺旋桨高速旋转时,就会产生流过舵面的滑流,根据伯努利定理,此时舵面就能产生升力,从而用来控制涵道无人机的飞行姿态。
作为优选实施方式,所述上十字定子4与所述下十字定子7的各足分别相对,所述上十字定子4采用螺栓固定在所述涵道上表面边缘的凹槽11内,所述下十字定子7采用螺栓固定在所述涵道下表面边缘的空腔10内。
作为优选实施方式,所述起落架6为4个,每个所述起落架6分别采用螺栓固定安装在涵道下方边缘,每个所述起落架6穿插安装在所述下十字定子7的每两个相邻足的中间位置。
作为优选实施方式,所述机翼2与所述上十字定子4中在同一直线上的两足平行。
作为优选实施方式,使用螺钉和螺母将所述机身1与所述上十字定子4连接。出于方便组装和拆卸的原因,使用螺钉和螺母将机身1与上十字定子4连接起来,而不是使用铆钉。
作为优选实施方式,两个所述机翼2为矩形,通过螺栓和螺母水平对称安装在所述机身1的两侧,以便在水平飞行时产生足够的升力。
作为优选实施方式,所述机身1有空腔,用于安装航空电子设备。
在下面的描述中,悬停是指低速飞行,包括向前飞行,向后飞行,向左飞行和向右飞行;水平飞行是指高速飞行;过渡过程由人工智能控制系统自动完成。
本实用新型的工作原理如下:
本实用新型,在由垂直悬停模式到水平飞行模式的过渡过程中:
首先,它垂直起飞,然后像直升机一样在空中悬停,一组共轴旋转的螺旋桨提供升力的同时,螺旋桨的下方也产生了高速的气流通过舵面。
靠通过四组舵面的气流产生的升力即旋转控制力来实现垂直起降和悬停时的姿态稳定控制(也叫做滑流控制)。
然后也是依靠同样的舵面滑流控制力来实现姿态俯仰,从而实现它的姿态从垂直悬停转变为像飞机一样的高速水平飞行。
水平飞行模式下,机身两侧的固定翼用来提供克服飞行器自身的重力,涵道内的1对共轴螺旋桨产生的推力用来提供飞行器向前飞行所需要的动力,四套舵面用来控制飞行器的姿态,使其能够稳定的保持水平飞行。
本实用新型,在由水平飞行模式到垂直悬停模式的过渡过程中:
水平飞行模式下,机身两侧的固定翼用来提供克服飞行器自身的重力,涵道内1对共轴螺旋桨产生的推力用来提供飞行器向前飞行所需要的动力,四套舵面用来控制飞行器的姿态,使其能够稳定的保持水平飞行。
然后也是依靠同样的舵面滑流控制力来实现姿态俯仰,从而实现它的姿态从水平飞行转变为像直升机一样的垂直悬停。
同样靠通过四套舵面的气流产生的升力即旋转控制力来实现垂直起降和悬停时的姿态稳定控制,升力由共轴旋转的螺旋桨提供。
降落时只需要逐渐减少螺旋桨的转速,减小升力,同时靠舵面的控制力来保持姿态的平稳,就能实现稳定的降落。
最终它就能从飞机一样的水平飞行转变为像直升机一样的垂直悬停,然后垂直降落。
过渡过程由人工智能控制系统自动完成:
人工智能系统在接收到飞行模式转换的控制指令后,通过飞控系统中预设的智能算法,就能实时判断出飞行器目前的飞行状态,从而发出控制指令,来增减发动机转速,改变舵面偏转角,以此实现对飞行器俯仰姿态和飞行速度的控制。当飞行器优垂直悬停过渡到水平飞行后,智能算法自动检测到此时的飞行姿态,来判断该过渡过程是否已经完成,如果完成则停止控制指令。同样的当飞行器由水平飞行转变为垂直悬停时,智能算法也会以同样的形式来进行指令控制。直到整个模式过渡过程完成为止。
以上所述仅为本实用新型的优选实施方式而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均包含在本实用新型的保护范围之内。
Claims (10)
1.一种涵道风扇无人飞行器,包括:机体装置和涵道装置,其特征在于:
所述机体装置包括机身和两个机翼,两个所述机翼分别位于机身的两侧;
所述涵道装置包括:上十字定子、一对共轴螺旋桨、四套舵面、下十字定子和多个起落架;
所述一对共轴螺旋桨包括上螺旋桨和下螺旋桨;
所述上螺旋桨固定在所述上十字定子的中间部位;
所述下螺旋桨固定在所述下十字定子的中间部位;
涵道上表面的边缘有多个凹槽,所述上十字定子固定在所述涵道上表面边缘的凹槽内;
涵道下表面的边缘有多个空腔,所述下十字定子固定在所述涵道下表面边缘的空腔内;
四套舵面分别安装在所述下十字定子的各足的下方;
所述机身与所述上十字定子连接。
2.根据权利要求1所述的涵道风扇无人飞行器,其特征在于,所述上螺旋桨和所述下螺旋桨旋转方向相反。
3.根据权利要求1所述的涵道风扇无人飞行器,其特征在于,所述上螺旋桨和所述下螺旋桨分别用桨夹与电机连接,所述电机用螺栓分别与所述上十字定子和所述下十字定子固定。
4.根据权利要求1所述的涵道风扇无人飞行器,其特征在于,每套所述舵面包括三块平行的舵板,所述下十字定子下方固定有一个方形底座,所述方形底座的四个方向均有一个轴孔,四套所述舵面分别通过转轴与所述方形底座连接,所述转轴穿过所述轴孔。
5.根据权利要求1所述的涵道风扇无人飞行器,其特征在于,所述上十字定子与所述下十字定子的各足分别相对,所述上十字定子采用螺栓固定在所述涵道上表面边缘的凹槽内,所述下十字定子采用螺栓固定在所述涵道下表面边缘的空腔内。
6.根据权利要求1所述的涵道风扇无人飞行器,其特征在于,所述起落架为4个,每个所述起落架分别采用螺栓固定安装在涵道下方边缘,每个所述起落架穿插安装在所述下十字定子的每两个相邻足的中间位置。
7.根据权利要求1所述的涵道风扇无人飞行器,其特征在于,所述机翼与所述上十字定子中在同一直线上的两足平行。
8.根据权利要求1所述的涵道风扇无人飞行器,其特征在于,使用螺钉和螺母将所述机身与所述上十字定子连接。
9.根据权利要求1所述的涵道风扇无人飞行器,其特征在于,两个所述机翼为矩形,通过螺栓和螺母水平对称安装在所述机身的两侧。
10.根据权利要求1所述的涵道风扇无人飞行器,其特征在于,所述机身有空腔,用于安装航空电子设备。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202022101399.6U CN213200096U (zh) | 2020-09-22 | 2020-09-22 | 一种涵道风扇无人飞行器 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202022101399.6U CN213200096U (zh) | 2020-09-22 | 2020-09-22 | 一种涵道风扇无人飞行器 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN213200096U true CN213200096U (zh) | 2021-05-14 |
Family
ID=75822254
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202022101399.6U Active CN213200096U (zh) | 2020-09-22 | 2020-09-22 | 一种涵道风扇无人飞行器 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN213200096U (zh) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114802711A (zh) * | 2022-04-08 | 2022-07-29 | 西安泽盛航空科技有限公司 | 尾部单涵道推进无人飞行器 |
| CN115520382A (zh) * | 2022-10-28 | 2022-12-27 | 上海机电工程研究所 | 尾座式垂直起降无人机 |
| CN116280175A (zh) * | 2023-02-08 | 2023-06-23 | 中国空气动力研究与发展中心空天技术研究所 | 一种涵道风扇与螺旋桨结合的垂起固定翼飞行器推进结构 |
-
2020
- 2020-09-22 CN CN202022101399.6U patent/CN213200096U/zh active Active
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114802711A (zh) * | 2022-04-08 | 2022-07-29 | 西安泽盛航空科技有限公司 | 尾部单涵道推进无人飞行器 |
| CN115520382A (zh) * | 2022-10-28 | 2022-12-27 | 上海机电工程研究所 | 尾座式垂直起降无人机 |
| CN116280175A (zh) * | 2023-02-08 | 2023-06-23 | 中国空气动力研究与发展中心空天技术研究所 | 一种涵道风扇与螺旋桨结合的垂起固定翼飞行器推进结构 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111268120B (zh) | 一种采用分布式涵道动力的垂直起降无人机 | |
| CN110949662B (zh) | 一种双翼构型的新概念布局飞机 | |
| CN110316370A (zh) | 一种分布式动力倾转机翼飞机的布局与控制方法 | |
| CN111516869A (zh) | 一种倾转旋翼-机翼垂直起降飞行器的布局与控制方法 | |
| CN105480416A (zh) | 一种倾转旋翼无人机 | |
| CN104401480A (zh) | 涵道式倾转飞行器 | |
| RU141669U1 (ru) | Летательный аппарат вертикального взлета и посадки | |
| CN205293091U (zh) | 一种倾转旋翼无人机 | |
| CN217893226U (zh) | 六旋翼电动垂直起降飞行器 | |
| CN106915459A (zh) | 一种混合式倾转旋翼无人机 | |
| CN213200096U (zh) | 一种涵道风扇无人飞行器 | |
| CN112937849A (zh) | 一种倾转式和固定式螺旋桨组合布局的垂直起降飞行器 | |
| CN205661659U (zh) | 电动多轴倾转旋翼无人机系统 | |
| CN108128448A (zh) | 双尾撑式共轴倾转旋翼无人机及其控制方法 | |
| CN114056557A (zh) | 一种混合动力倾转旋翼无人飞行器 | |
| CN111498100A (zh) | 一种推力矢量倾转三旋翼无人机及其控制方法 | |
| CN107352029A (zh) | 一种电动多轴倾转旋翼无人机系统 | |
| CN103754360A (zh) | 一种类飞碟式旋翼机 | |
| CN214824104U (zh) | 一种无人机 | |
| CN105173076B (zh) | 一种垂直起降无人机 | |
| CN212951108U (zh) | 一种变直径无人倾转旋翼机 | |
| CN206327567U (zh) | 一种复合无人飞行器 | |
| CN108791873A (zh) | 一种纵列矢量双旋翼电动垂直起降无人机及其控制方法 | |
| CN111792027A (zh) | 一种双机身串列翼垂直起降布局的飞行器 | |
| CN209176908U (zh) | 一种复合驱动的旋翼固定翼无人机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CP03 | Change of name, title or address |
Address after: No. 427-29, 4th Floor, Building 1, No. 9 Yongchang North Road, Beijing Economic and Technological Development Zone, Daxing District, Beijing 102600 (cluster registration) Patentee after: Guishen Zhihang Technology (Beijing) Co.,Ltd. Country or region after: China Address before: 653100 Jiulong Intelligent Manufacturing Industrial Park, Yuxi high tech Zone, Yunnan Province Patentee before: Hanwo Zhihang Technology (Yuxi) Co.,Ltd. Country or region before: China |
|
| CP03 | Change of name, title or address |