CN213918264U - 一种居室轮式机器人系统 - Google Patents
一种居室轮式机器人系统 Download PDFInfo
- Publication number
- CN213918264U CN213918264U CN202021140310.0U CN202021140310U CN213918264U CN 213918264 U CN213918264 U CN 213918264U CN 202021140310 U CN202021140310 U CN 202021140310U CN 213918264 U CN213918264 U CN 213918264U
- Authority
- CN
- China
- Prior art keywords
- joint
- circuit board
- steering engine
- main control
- adopts
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000000149 penetrating effect Effects 0.000 claims abstract description 7
- 238000011161 development Methods 0.000 claims description 16
- WHXSMMKQMYFTQS-UHFFFAOYSA-N Lithium Chemical compound [Li] WHXSMMKQMYFTQS-UHFFFAOYSA-N 0.000 claims description 10
- 229910052744 lithium Inorganic materials 0.000 claims description 10
- 210000003857 wrist joint Anatomy 0.000 claims description 10
- 210000002310 elbow joint Anatomy 0.000 claims description 9
- 210000000323 shoulder joint Anatomy 0.000 claims description 9
- 238000004891 communication Methods 0.000 claims description 5
- 240000007651 Rubus glaucus Species 0.000 claims description 4
- 235000011034 Rubus glaucus Nutrition 0.000 claims description 4
- 235000009122 Rubus idaeus Nutrition 0.000 claims description 4
- 230000033001 locomotion Effects 0.000 claims description 2
- 238000012545 processing Methods 0.000 claims description 2
- 230000006641 stabilisation Effects 0.000 claims description 2
- 238000011105 stabilization Methods 0.000 claims description 2
- 210000001503 joint Anatomy 0.000 claims 1
- 230000003534 oscillatory effect Effects 0.000 claims 1
- 238000010586 diagram Methods 0.000 description 4
- 238000005516 engineering process Methods 0.000 description 4
- 238000000034 method Methods 0.000 description 2
- 238000013461 design Methods 0.000 description 1
- 238000011160 research Methods 0.000 description 1
Images





Landscapes
- Manipulator (AREA)
Abstract
一种居室轮式机器人系统,由机械结构和电控系统组成:机械结构包括移动平台、机身和机械臂;移动平台是轮式移动机构,机身是立式中空前表面上方有穿臂孔的壳体,机械臂是包含多个具有旋转和摆动功能的关节和固定臂的组合;机身立放于移动平台上,机械臂穿过机身前表面的穿臂孔固定于后表面的内侧;电控系统包括主控电路板、电机、关节电路板、单轴舵机、双轴舵机和电源;主控电路板安放于移动平台内;电机安装在移动平台下方;关节电路板安放在机械臂关节附近里面;单轴舵机和双轴舵机都安装在机械臂关节内,单轴舵机驱动轴驱动关节的旋转,双轴舵机驱动关节的摆动。
Description
技术领域
本发明属于机器人技术与应用,涉及一种居室用的轮式机器人系统。
背景技术
市面上存在的主要类型的机器人有娱乐机器人、服务机器人和工业机器人,它们主要用于在娱乐、服务、医疗、工业和农业等方面,为人类社会的生活带来了极大的便利,不仅仅节省了人力,更重要的是节约了时间。
纵观全球的机器人市场,由于全球各地,尤其是发达国家中的出生人口不断减少,发展中国家的科技进步突飞猛进,导致劳动力成本加大以及对加工产品的品质需求不断的提升,机器人市场规模显著增加。在众多领域,机器人需要处理的情况会很复杂,而机械手臂的自由度影响着机器人的动作范围等操作,所以为了使机器人的工作精度更高,多自由度的机械手臂应运而生,带多自由度机械手臂的机器人更是发展的大趋势。多自由度机械手臂的结构主要包括肩关节、肘关节以及腕关节。为了实现抓取功能,可以在腕关节处安装一个负责抓取的机械手。在对机械臂的驱动过程中,主要使电机转动从而控制相关关节的转动,以此通过将机械手移动到物体附近进行抓取。仅仅手臂检拾物体功能过于单调,所以出现了许多功能复杂的机械手臂,例如:带移动底盘的抓取机器人和多自由度手臂的迎宾机器人等。但在其中最重要的部分还是对于机械手臂的控制研究和创新。
将多种技术集成于一体的机器人在很大的程度上实现了“一机多用”,不仅节约了材料成本,更是为科技的发展增添了新思路。因为它既可用于服务,亦可用于娱乐,所以在当今社会可以得到广泛的认可。本发明将结合各种技术,提出一种具有机械臂的轮式机器人,具有功能强和结构合理的特点。
发明内容
所发明的一种居室轮式机器人系统,由机械结构和电控系统组成;机械结构包括移动平台、机身和机械臂;移动平台是轮式移动机构,机身是立式中空前表面上方有穿臂孔的壳体,机械臂是包含多个具有旋转和摆动功能的关节和固定臂的组合:机身立放于移动平台上,机械臂穿过机身前表面的穿臂孔固定于后表面的内侧;电控系统包括主控电路板、电机、关节电路板、单轴舵机、双轴舵机和电源;主控电路板安放于移动平台内;电机安装在移动平台下方,电机轴与移动平台轮相连,电机电源线与电池相连,电机控制线与主控电路板相连;关节电路板安放在机械臂关节附近里面,专门用于就近关节的控制,与主控电路板通过CAN总线相连;单轴舵机和双轴舵机都安装在机械臂关节内,舵机轴与关节相连,单轴舵机驱动轴驱动关节的旋转,双轴舵机驱动关节的摆动;舵机的电源线与电源相连,舵机的控制线与关节电路板相连;电源给整个电路系统供电;该居室轮式机器人系统的工作原理是,主控电路板发出控制信号,控制电机,给关节电路板发控制信号,关节电路板控制舵机,电机驱动移动平台运动,舵机驱动机械臂运动。
所发明的一种居室轮式机器人系统,移动平台的前侧面为向移动平台倾斜的面,以便于机械臂将前方地面物体拿回到移动平台上。
所发明的一种居室轮式机器人系统,机械臂由肩、肘和腕关节组成,每个关节都有旋转和摆动运动。
所发明的一种居室轮式机器人系统,主控电路板采用带CAN总线接口的单片机开发板,电动机采用无刷直流电动机,关节电路板也采用带CAN总线接口的单片机开发板,摆动舵机采用双输出轴舵机,旋转舵机采用单输出轴舵机,电源系统采用带稳压的锂电池系统;主控电动机通过I/O口与无刷直流电动机的PWM、CW和FG线相连,主控电路板通过CAN总线与关节电路板相连,关节电路板通过I/O口与舵机的PWM线相连,主控电路板、关节电路板和舵机的供电线与锂电池系统的5V电源输出相连,无刷直流电动机的供电线与锂电池系统的12V电源相连。
所发明的一种居室轮式机器人系统,还包括摄像头:摄像头安放于机身前表面的穿臂孔的上方,摄像头摄像面朝向前方,摄像头数据输出线与主控电路板相连;摄像头用于取得环境图像信息,为机器人视觉提供基本条件。
所发明的一种居室轮式机器人系统,还包括姿态传感器,安放在各个关节处,传感信号输出线与主控电路板相连,用于检测和生成机器人的姿态信息。
所发明的一种居室轮式机器人系统,还包括通信模块,安放在主控电路板附近,与主控电路板相连,用于机器人与外部控制的信息通信,有接受外部信号息并传出机器人系统状态的功能。
所发明的一种居室轮式机器人系统的优点是:单臂式机械臂配以移动平台前侧面倾斜的简单抓取结构,CAN的分布式电控结构让连线少且便于扩展,每个关节都用两种舵机驱动以具备旋转和摆动两种自由度。
附图说明
附图1是本发明所述的居室轮式机器人系统的结构示意图。
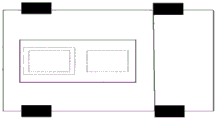
附图2是本发明所述的居室轮式机器人系统的俯视结构示意图。
附图3是本发明所述的居室轮式机器人系统的基本电路图。
图4是本发明所述的居室轮式机器人系统的主控电路板分为两块的基本电路图。
附图5是本发明所述的居室轮式机器人系统的具体电路图。
附图6是本发明所述的居室轮式机器人系统的主控电路板分为两块的具体电路图。
具体实施方式
实施方式一
参照附图1、附图2、附图3和附图5说明本实施方式,所发明的一种居室轮式机器人系统,由移动平台1、机身2、机械臂3和电控系统4组成;机械臂3有一个肩关节、一个肘关节和一个腕关节,主控电路板采用STM32F407开发板,电动机采用GM37-BL3650,关节电路板采用C8051F040开发板,肩关节摆动舵机采用LD-260MG双轴舵机,肩关节旋转舵机采用RDS5160 单轴舵机,肘关节摆动舵机采用RDS3225双轴舵机,肘关节旋转舵机采用RDS3225单轴舵机, 腕关节摆动舵机采用RDS3115双轴舵机,腕关节旋转舵机采用MG996单轴舵机,锂电池系统采用有5V和12V输出的节仕得锂电池,通信模块采用ESP8266WIFI模块板。
实施方式二
参照的图1、附图2、附图4和附图6说明本实施方式,所发明的一种居室轮式机器人系统,还包括摄像头,摄像头是D435,主控电路板由两块电路板担当,一块是树莓派开发板,另一块是STM32F407开发板;树莓派开发板主要用于图像处理,与摄像头通过USB口相连,又通过USB口与STM32F407相连。
实施方式三
参照附图1到附6说明本实施方式,所发明的一种居室机器人系统,机械部分的尺寸是, 设计机器人整体高度约为100cm,其中机械手的机身高约为80cm,上臂和下臂的长度均约为 20cm,各个关节的长度约为10厘米,手长约为10厘米。
Claims (10)
1.一种居室轮式机器人系统,其特征在于:由机械结构和电控系统组成,机械结构包括移动、平台、机身和机械臂;移动平台是轮式移动机构,机身是立式中空前表面上方有穿臂孔的壳体,机械臂是包含多个具有旋转和摆动功能的关节和固定臂的组合;机身立放于移动平台上,机械臂穿过机身前表面的穿臂孔固定于后表面的内侧;电控系统包括主控电路板、电机、关节电路板、单轴舵机、双轴舵机和电源;主控电路板安放于移动平台内;电机安装在移动平台下方,电机轴与移动平台轮相连,电机电源线与电池相连,电机控制线与主控电路板相连;关节电路板安放在机械臂关节附近里面,专门用于就近关节的控制,与主控电路板通过CAN总线相连;单轴舵机和双轴舵机都安装在机械臂关节内,舵机轴与关节相连,单轴舵机驱动轴驱动关节的旋转,双轴舵机驱动关节的摆动;舵机的电源线与电源相连,舵机的控制线与关节电路板相连;电源给整个电路系统供电。
2.根据权利要求1所述的一种居室轮式机器人系统,其特征在于:移动平台的前侧面为向移动平台倾斜的面,以便于机械臂将前方地面物体拿回到移动平台上。
3.根据权利要求2所述的一种居室轮式机器人系统,其特征在于:机械臂由肩、肘和腕关节组成,每个关节都有旋转和摆动运动。
4.根据权利要求3所述的一种居室轮式机器人系统,其特征在于:主控电路板用带CAN总线接口的单片机开发板,电动机采用无刷直流电动机,关节电路板也采用带CAN总线接口的单片机开发板,摆动舵机采用双输出轴舵机,旋转舵机采用单输出轴舵机,电源系统采用带稳压的锂电池系统;主控电动机通过I/O口与无刷直流电动机的PWM,CW和FG线相连,主控电路板通过CAN总线与关节电路板相连,关节电路板通过I/O口与舵机的PWM线相连,主控电路板、关节电路板和舵机的供电线与锂电池系统的5V电源输出相连,无刷直流电动机的供电线与锂电池系统的12V电源相连。
5.根据权利要求4所述的一种居室轮式机器人系统,其特征在于:还包括摄像头,摄像头安放于机身前表面的穿臂孔的上方,摄像头摄像面朝向前方,摄像头数据输出线与主控电路板相连。
6.根据权利要求5所述的一种居室轮式机器人系统,其特征在于:还包括姿态传感器,安放在各个关节处,传感信号输出线与主控电路板相连。
7.根据权利要求6所述的一种居室轮式机器人系统,其特征在于:还包括通信模块,安放在主控电路板附近,与主控电路板相连。
8.根据权利要求4所述的一种居室轮式机器人系统,其特征在于:机械臂有一个肩关节、一个肘关节和一个腕关节;主控电路板采用STM32F407开发板,电动机采用GM37-BL3650,关节电路板采用C8051F040开发板,肩关节摆动舵机采用LD-260MG双轴舵机,肩关节旋转舵机采用RDS5160单轴舵机,肘关节摆动舵机采用RDS3225双轴舵机,肘关节旋转舵机采用RDS3225单轴舵机,腕关节摆动舵机采用RDS3115双轴舵机,腕关节旋转舵机采用MG996单轴舵机,锂电池系统采用有5V和12V输出的节仕得锂电池,通信模块采用ESP8266WIFI模块板。
9.根据权利要求5所述的一种居室轮式机器人系统,其特征在于:还包括摄像头,摄像头是D435,主控电路板由两块电路板担当,一块是树莓派开发板,另一块是STM32F407开发板;树莓派开发板用于图像处理,与摄像头通过USB口相连,又通过USB口与STM32F407相连。
10.根据权利要求9所述的一种居室轮式机器人系统,其特征在于:机械部分的尺寸是,设计机器人整体高度为100cm,其中机械手的机身高为80cm,上臂和下臂的长度均为20cm,各个关节的长度为10厘米,手长为10厘米。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202021140310.0U CN213918264U (zh) | 2020-06-18 | 2020-06-18 | 一种居室轮式机器人系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202021140310.0U CN213918264U (zh) | 2020-06-18 | 2020-06-18 | 一种居室轮式机器人系统 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN213918264U true CN213918264U (zh) | 2021-08-10 |
Family
ID=77141794
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202021140310.0U Expired - Fee Related CN213918264U (zh) | 2020-06-18 | 2020-06-18 | 一种居室轮式机器人系统 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN213918264U (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111590541A (zh) * | 2020-06-18 | 2020-08-28 | 哈尔滨若朋机器人有限责任公司 | 一种居室轮式机器人系统 |
-
2020
- 2020-06-18 CN CN202021140310.0U patent/CN213918264U/zh not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111590541A (zh) * | 2020-06-18 | 2020-08-28 | 哈尔滨若朋机器人有限责任公司 | 一种居室轮式机器人系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106363612A (zh) | 一种视觉引导的全向移动双臂机器人及其全向移动方法 | |
| JPH07273B2 (ja) | ロボツトマニピユレ−タ | |
| CN108406726A (zh) | 一种轮式移动机械排爆机器人 | |
| CN103645740A (zh) | 基于无线充电奇数轴飞行器的智能巡航机器人 | |
| CN101327589A (zh) | 遥操作平面冗余度机械臂指令输入及构型控制系统及方法 | |
| CN211992966U (zh) | 全向双臂移动协作机器人 | |
| CN213918264U (zh) | 一种居室轮式机器人系统 | |
| CN209870706U (zh) | 一种基于流线体的半有缆式水下观察级机器人 | |
| CN113184078B (zh) | 智能化四足机器人 | |
| CN206123654U (zh) | 一种视觉引导的全向移动双臂机器人 | |
| CN108161887A (zh) | 带机械手的两轮视觉机器人 | |
| CN206501121U (zh) | 一种多功能机器人 | |
| CN109649095B (zh) | 一种仿生鳄鱼两栖机器人 | |
| CN107272725B (zh) | 具有视觉反馈的球形机器人运动控制系统及运动控制方法 | |
| CN114474013A (zh) | 一种机器人头部结构 | |
| CN211745441U (zh) | 一种自主行走的樱桃采摘机器人 | |
| CN102815390B (zh) | 便携式智能推进系统 | |
| CN211193863U (zh) | 一种智能识别搬运机器人 | |
| CN204725501U (zh) | 体感机械臂舒适度检测装置 | |
| CN208438335U (zh) | 一种复合型移动机器人及复合型移动机器人控制系统 | |
| CN207104929U (zh) | 一种隧道多功能智能应急救援履带式机器人 | |
| CN214084705U (zh) | 一种便携式水下监测机器人 | |
| CN216830940U (zh) | 肩背式双臂控制装置以及医疗设备 | |
| CN111590541A (zh) | 一种居室轮式机器人系统 | |
| CN216231702U (zh) | 一种智能输转平台 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20210810 |