CN213969656U - 倒挂地轨结构和具有倒挂地轨结构的可移动焊接机器人 - Google Patents
倒挂地轨结构和具有倒挂地轨结构的可移动焊接机器人 Download PDFInfo
- Publication number
- CN213969656U CN213969656U CN202022359987.XU CN202022359987U CN213969656U CN 213969656 U CN213969656 U CN 213969656U CN 202022359987 U CN202022359987 U CN 202022359987U CN 213969656 U CN213969656 U CN 213969656U
- Authority
- CN
- China
- Prior art keywords
- guide rail
- base
- ground rail
- rail structure
- layer board
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000003466 welding Methods 0.000 title claims abstract description 42
- 230000001174 ascending effect Effects 0.000 claims description 4
- 239000000428 dust Substances 0.000 abstract description 5
- 239000002893 slag Substances 0.000 abstract description 5
- 230000000694 effects Effects 0.000 abstract description 3
- 238000000034 method Methods 0.000 description 5
- 239000002699 waste material Substances 0.000 description 5
- 238000004519 manufacturing process Methods 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 3
- 239000002184 metal Substances 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 238000005498 polishing Methods 0.000 description 2
- 230000009286 beneficial effect Effects 0.000 description 1
- 239000000779 smoke Substances 0.000 description 1
Images


Landscapes
- Manipulator (AREA)
- Butt Welding And Welding Of Specific Article (AREA)
Abstract
本实用新型提供一种倒挂地轨结构和具有倒挂地轨结构的可移动焊接机器人,包括底座,所述底座设有沿其长度延伸方向的第一凹槽,所述第一凹槽距所述底座的边部有间隔,所述底座的下端面宽度方向间隔布置两条平行的导轨,所述底座上设有与导轨导向移动配合的移动托板,所述移动托板下端面设有与两条所述导轨导向移动配合的滑动块。还发明了一种具有倒挂地轨的可移动焊接机器人,以解决现有技术中移动件与导轨配合时因作业产生的切屑、焊渣、粉尘粘连在导轨上,影响导轨和滑块的配合效果,降低导轨的使用寿命的技术问题。
Description
技术领域
本实用新型涉及焊接技术领域,具体涉及一种倒挂地轨结构和具有倒挂地轨结构的可移动焊接机器人。
背景技术
焊接是现代机械制造业中必不可少的一种加工工艺方法,在汽车制造、工程机械等行业中占有重要的地位。自动焊接技术也已经在不同的加工制造领域得到了越来越广泛的应用,如支撑梁、支撑架和汽车底盘制造焊接等。随着许多焊接结构件的焊接精度和速度要求越来越高,一般工人因焊接速度慢、焊接质量参差不齐和劳动强度高等原因已难以胜任这一工作;此外,焊接时的电弧、火花及烟雾等对人体会造成伤害。
现阶段,在金属加工、焊接、打磨中普遍将导轨安装在床身的上平面,虽然导轨副的受力比较好,容易安装;但在金属加工、焊接、打磨中过程中会产生的废料、焊渣、粉尘等很容易粘连在暴露的导轨上,从而影响导轨和滑块的配合效果,进一步降低了导轨的使用寿命。
实用新型内容
本实用新型的目的在于提供一种倒挂地轨结构和具有倒挂地轨结构的可移动焊接机器人,以解决现有技术中移动件与导轨配合时因作业产生的切屑、焊渣、粉尘粘连在导轨上,影响导轨和滑块的配合效果,降低导轨的使用寿命的技术问题。
为解决上述技术问题,本实用新型采用如下技术方案:
一种倒挂地轨结构,包括底座,所述底座上设有开口向上、沿其长度延伸方向的第一凹槽,所述第一凹槽距所述底座的边部有间隔,所述底座的下端面宽度方向间隔布置两条平行的导轨,所述底座上设有与导轨导向移动配合的移动托板,所述移动托板下端面设有与两条所述导轨导向移动配合的滑动块。
优选地,所述滑动块包括多个间隔布置的L型滑动块。
优选地,所述L型滑动块包括横板和竖板,所述横板的上端面设有滑块,所述滑块设有开口向上的第二凹槽,所述第二凹槽与所述导轨相匹配。
优选地,所述导轨为工字形导轨。
一种具有倒挂地轨的可移动焊接机器人,包括上述的倒挂地轨结构,所述移动托板上端面设有用于固定机器人的底座壳体,与所述底座壳体相对应的托板上设有贯穿托板的预留孔,所述壳体内部安装有传动电机,所述传动电机的输出轴沿垂直于导轨的长度延伸方向穿过所述预留孔,所述传动电机的输出轴的自由端套接有齿轮,所述齿轮与设置在所述第一凹槽的侧壁上的齿条相啮合。
优选地,所述移动托板上端面设有焊接机器人,所述焊接机器人包括六轴机械臂和设置在六轴机械臂的自由端的焊枪。
优选地,所述底座设有沿其长度延伸方向的第三凹槽,所述移动托板上设有与第三凹槽相配合用于安装线缆的拖链。
优选地,每条所述导轨的长度延伸的两端设有止挡件。
与现有技术相比,本实用新型的有益效果:
1.本实用新型采用在底座的下端面间隔布置两条平行的导轨,将导轨设置在底座下端,可以减少产生的废料、焊渣、粉尘,特别是比较重的废料飞溅对导轨的撞击的损伤,进而提高导轨的使用寿命。
进一步,底座上设有与导轨导向移动配合的移动托板,所述滑动块包括多个间隔布置的L型滑动块,本实用新型L型滑动块包括横板和竖板,所述横板的上端面设有滑块,所述滑块设有开口向上的凹槽,所述凹槽与所述导轨相匹配,避免移动托板在移动时出现晃动,从而提高焊接工作的稳定性和精度。
进一步地,本实用新型移动托板上端面设固定有机器人底座壳体,与所述壳体相对应的移动托板上设有贯穿托板的预留孔,所述壳体内部安装有传动电机,所述传动电机的输出轴沿垂直于导轨的长度延伸方向穿过所述预留孔,所述传动电机的输出轴的自由端套接有齿轮,齿轮与设置在导轨内侧壁的齿条相啮合。将电机设置在机器人底座壳体内节省空间,使移动托板受力更为均匀。
进一步地,本实用新型使用六轴机械臂机器人,可操作性强、坚固耐用速度快、精度高等优点。
附图说明
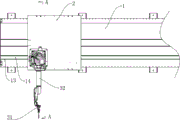
图1是本实用新型具有倒挂地轨结构的可移动焊接机器人的具体实施例的立体图;
图2是本实用新型具有倒挂地轨结构的可移动焊接机器人的具体实施例的俯视图;
图3是图2在A-A方向的剖视图;
图中:1、地轨,11.底座,12.导轨,13.齿条,14.第一凹槽,14.第三凹槽;2、移动托板,21. L型滑动块,22. 滑块,23. 第二凹槽,24. 预留孔,25.拖链;3、焊接机器人,31.焊枪,32.六轴机械臂,33.底座壳体,34. 传动电机,35.齿轮。
具体实施方式
下面结合附图对本实用新型的实施方式作进一步说明。
本实用新型倒挂地轨结构的具体实施例,如图1至图3所示,包括底座11,底座11设有沿其长度延伸方向的第一凹槽14,第一凹槽14距底座11的边部有间隔,底座11的下端面边沿处的宽度方向间隔布置两条平行的工字形导轨12,将导轨12设置在底座11下可以减少产生的废料、焊渣、粉尘,特别是比较重的废料飞溅对导轨12的撞击的损伤,进而提高导轨12的使用寿命;底座11上设有与导轨12导向移动配合的移动托板2,移动托板2下端面设有与两条导轨12导向移动配合的滑动块,滑动块包括多个间隔布置的L型滑动块21,L型滑动块21包括横板和竖板,横板的上端面设有滑块22,滑块22设有开口向上的第二凹槽23,第二凹槽23与导轨12相匹配。工字型导轨12与相应第二凹槽23向配合,可以避免移动托板2在移动时出现晃动,从而提高焊接工作的稳定性和精度。
一种具有倒挂地轨结构的可移动焊接机器人,上述的倒挂导轨结构,移动托板2上端面设有用于固定机器人的底座壳体33,与底座壳体33相对应的托板上设有贯穿托板的预留孔24,壳体内部安装有传动电机34,电机设置在机器人底座壳体33内节省空间,使移动托板2受力更为均匀。传动电机34的输出轴沿垂直于导轨12的长度延伸方向穿过预留孔24,传动电机34的输出轴的自由端套接有齿轮35,齿轮35与设置在第一凹槽14的侧壁上的齿条13相啮合。移动托板2上端面设有焊接机器人,焊接机器人包括六轴机械臂32和设置在六轴机械臂32的自由端的焊枪31;采用六轴机械臂32机器人,具有可操作性强、坚固耐用速度快、精度高等优点。
本实施例中,底座11设有沿其长度延伸方向的第三凹槽14,移动托板2上设有与第三凹槽14相配合用于安装线缆的拖链25。避免在移动托板2移动时,控制机器人线缆排布的混乱,影响移动托板2的移动。
本实施例中,每条导轨12的长度延伸的两端设有止挡件。防止移动托板2从导轨12上脱出。
本实用新型的工作过程如下,将移动托板2安装到导轨12上,同时启动传动电机34,带动焊接机器人3沿导轨12长度延伸方向往复运行。
在其他实施例中,可以将传动电机34安装在移动托板2的侧边位置。
Claims (8)
1.一种倒挂地轨结构,包括底座,其特征在于:所述底座上设有开口向上、沿其长度延伸方向的第一凹槽,所述第一凹槽距所述底座的边部有间隔,所述底座的下端面宽度方向间隔布置两条平行的导轨,所述底座上设有与导轨导向移动配合的移动托板,所述移动托板下端面设有与两条所述导轨导向移动配合的滑动块。
2.根据权利要求1所述的倒挂地轨结构,其特征在于:所述滑动块包括多个间隔布置的L型滑动块。
3.根据权利要求2所述的倒挂地轨结构,其特征在于:所述L型滑动块包括横板和竖板,所述横板的上端面设有滑块,所述滑块设有开口向上的第二凹槽,所述第二凹槽与所述导轨相匹配。
4.根据权利要求1-3任意一项所述的倒挂地轨结构,其特征在于:所述导轨为工字形导轨。
5.一种具有倒挂地轨结构的可移动焊接机器人,其特征在于,包括权利要求1所述的倒挂地轨结构,所述移动托板上端面设有用于固定机器人的底座壳体,与所述底座壳体相对应的托板上设有贯穿托板的预留孔,所述壳体内部安装有传动电机,所述传动电机的输出轴沿垂直于导轨的长度延伸方向穿过所述预留孔,所述传动电机的输出轴的自由端套接有齿轮,所述齿轮与设置在所述第一凹槽的侧壁上的齿条相啮合。
6.根据权利要求5所述的具有倒挂地轨结构的可移动焊接机器人,其特征在于:所述移动托板上端面设有焊接机器人,所述焊接机器人包括六轴机械臂和设置在六轴机械臂的自由端的焊枪。
7.根据权利要求5所述的具有倒挂地轨结构的可移动焊接机器人,其特征在于:所述底座设有沿其长度延伸方向的第三凹槽,所述移动托板上设有与第三凹槽相配合用于安装线缆的拖链。
8.根据权利要求5-7任意一项所述的具有倒挂地轨结构的可移动焊接机器人,其特征在于:每条所述导轨的长度延伸的两端设有止挡件。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202022359987.XU CN213969656U (zh) | 2020-10-21 | 2020-10-21 | 倒挂地轨结构和具有倒挂地轨结构的可移动焊接机器人 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202022359987.XU CN213969656U (zh) | 2020-10-21 | 2020-10-21 | 倒挂地轨结构和具有倒挂地轨结构的可移动焊接机器人 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN213969656U true CN213969656U (zh) | 2021-08-17 |
Family
ID=77257065
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202022359987.XU Active CN213969656U (zh) | 2020-10-21 | 2020-10-21 | 倒挂地轨结构和具有倒挂地轨结构的可移动焊接机器人 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN213969656U (zh) |
-
2020
- 2020-10-21 CN CN202022359987.XU patent/CN213969656U/zh active Active
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10722942B2 (en) | Multi-arm hanging rail type casting cleaning robot | |
| CN107127734A (zh) | 悬挂轨道式多臂铸造机器人 | |
| CN108973478B (zh) | 大尺度石材雕刻机器人总成及其雕刻石材的方法 | |
| CN105880894A (zh) | 一种焊接机器人与焊接夹具成套设备 | |
| CN112518193A (zh) | 一种自动翻转焊接与切割机器人装置 | |
| CN107979028B (zh) | 激光剥线机和激光剥线机的剥线方法 | |
| CN213969656U (zh) | 倒挂地轨结构和具有倒挂地轨结构的可移动焊接机器人 | |
| KR200317671Y1 (ko) | 러그 절단기 | |
| CN112570942B (zh) | 一种用于防护型车辆的车身组合焊接系统 | |
| CN213945350U (zh) | 全封闭护罩地轨和具有全封闭护罩地轨的移动焊接机器人 | |
| CN206913138U (zh) | 悬挂轨道式多臂铸造机器人 | |
| KR100315666B1 (ko) | 포터블 밀링 머신 | |
| CN210997196U (zh) | 一种机械加工焊接装置 | |
| CN212734701U (zh) | 起重机单主梁内缝机器人焊接生产线 | |
| GB2569414A (en) | Multi-arm hanging rail type casting cleaning robot | |
| CN213916801U (zh) | 围栏焊接机器人工作站 | |
| CN106684429A (zh) | 一种电池模块自动打标清洗机构 | |
| CN115533820B (zh) | 一种玻璃组装生产线 | |
| CN209938171U (zh) | 一种通用雕刻机 | |
| CN203738213U (zh) | 与焊接机器人配套的工件夹装工作台结构 | |
| JPH0710872Y2 (ja) | 溶接ポジショナ用保持装置 | |
| CN213969654U (zh) | 大梁焊接工作站 | |
| JP2005280996A (ja) | 材料を板形状に加工する機械のための板状要素の荷役装置 | |
| CN218312864U (zh) | 一种机械零件加工用定位装置 | |
| CN207807724U (zh) | 一种用于铸件喷雾的机器人 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |