CN214029263U - 块状物料自动装瓶装置 - Google Patents
块状物料自动装瓶装置 Download PDFInfo
- Publication number
- CN214029263U CN214029263U CN202021245212.3U CN202021245212U CN214029263U CN 214029263 U CN214029263 U CN 214029263U CN 202021245212 U CN202021245212 U CN 202021245212U CN 214029263 U CN214029263 U CN 214029263U
- Authority
- CN
- China
- Prior art keywords
- axis
- actuator
- fixing plate
- arm
- connecting rod
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000000463 material Substances 0.000 title claims abstract description 96
- 239000000523 sample Substances 0.000 claims description 12
- 239000013590 bulk material Substances 0.000 claims description 9
- 238000009434 installation Methods 0.000 abstract description 3
- 230000000712 assembly Effects 0.000 description 9
- 238000000429 assembly Methods 0.000 description 9
- 238000004519 manufacturing process Methods 0.000 description 6
- 230000000694 effects Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 230000000149 penetrating effect Effects 0.000 description 3
- 238000006073 displacement reaction Methods 0.000 description 2
- 239000000919 ceramic Substances 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- CNQCVBJFEGMYDW-UHFFFAOYSA-N lawrencium atom Chemical compound [Lr] CNQCVBJFEGMYDW-UHFFFAOYSA-N 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 150000002739 metals Chemical class 0.000 description 1
- 229920003023 plastic Polymers 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
Images









Landscapes
- Filling Of Jars Or Cans And Processes For Cleaning And Sealing Jars (AREA)
Abstract
本实用新型公开了一种块状物料自动装瓶装置,探入臂组件包括:探入臂,探入臂上部有连杆作动器,下部有连接物料固定支架;物料固定支架,与探入臂相连接,连接点位于探入臂下端一侧边;物料固定元件,位于物料固定支架下;连杆作动器,位于探入臂的上端,连杆作动器通过连杆连接到物料固定支架;连杆,位于探入臂内部空腔中,连杆一端连接连杆作动器,另外一端连接物料固定支架;探入臂连接件,位于探入臂上端;XZY三轴移动组件包括:第一固定板,连接有Y轴作动器和Y轴移动滑轨;第二固定板,连接有X轴作动器和X轴移动滑轨;第三固定板,连接有Z轴作动器和Z轴移动滑轨;本实用新型的有益效果是:结构简单、容易安装、成本低廉。
Description
技术领域
本实用新型涉及的是一种代替人工的自动装瓶装置,特别涉及的是一种将块状物料有序装入瓶中,并保持物料在瓶中的整齐放置状态的自动化机电装置。
背景技术
目前市场上现有的块状物料自动装瓶装置,通常适用于较小的块状物料。此处所称较小物料,是指相对与瓶口而言,两块或以上待装块状物料的排列尺寸小于瓶颈尺寸。对于较大尺寸的块状物料,目前主要依靠手工装填,没有较为理想、快速的自动化装瓶装置。本实用新型块状物料自动装瓶装置,可以较好解决较大块状物料的自动化装填难题,从而增强了相关工厂生产线的生产效率,减少了人工操作与人力成本,也减少了装瓶过程中的物料损伤与错漏,同时使装瓶后的物料排列整齐美观。
发明内容
本实用新型的目的在于,提供一种块状物料自动装瓶装置,用以克服上述缺陷。
为实现上述的目的,本实用新型采用的技术方案在于,提供一种块状物料自动装瓶装置,包括:探入臂,其内部为空腔结构,所述探入臂上部有连杆作动器,下部有连接物料固定支架;物料固定支架,与所述探入臂相连接,连接点位于所述探入臂下端一侧边,使所述物料固定支架可以围绕连接点转动;物料固定元件,位于所述物料固定架下,2个或2个以上所述物料固定元件与所述物料固定支架相连接;连杆作动器,位于所述探入臂的上端,所述连杆作动器通过连杆连接到物料固定支架;连杆,位于所述探入臂内部空腔中,所述连杆一端连接连杆作动器,另外一端连接物料固定支架;探入臂连接件,位于探入臂上端,与下述的Z轴移动滑轨相连接。由上述装置构成的整体部件,以下简称为探入臂组件。
本实用新型采用的技术方案还在于,包括:第一固定板,所述的第一固定板连接有Y 轴作动器,所述的第一固定板还连接有Y轴移动滑轨;第二固定板,所述的第二固定板连接有X轴作动器,所述的第二固定板还连接有X轴移动滑轨;第三固定板,所述的第三固定板连接有Z轴作动器,所述的第三固定板还连接有Z轴移动滑轨;Y轴移动滑轨,所述的Y轴移动滑轨,一端连接第一固定板,另外一端连接第二固定板,可以使所述第一固定板与第二固定板互相之间移动位置;X轴移动滑轨,所述的X轴移动滑轨,一端连接第二固定板,另外一端连接第三固定板,可以使所述第二固定板与第三固定板互相之间移动位置;Z轴移动滑轨,所述的Z轴移动滑轨,一端连接第三固定板,另外一端连接上述的探入臂连接件,可以使所述第三固定板与探入臂互相之间移动位置;Y轴作动器,其固定在第一固定板上,所述的Y轴作动器,通过所述的Y轴移动滑轨,驱动所述的第二固定板发生位移;X轴作动器,其固定在第二固定板上,所述的X轴作动器,通过所述的X轴移动滑轨,驱动所述的第三固定板发生位移;Z轴作动器,其固定在第三固定板上,所述的Z轴作动器,通过所述的Z轴移动滑轨,驱动所述的探入臂发生位移。由上述装置构成的整体部件,以下简称为XYZ三轴移动组件。
本实用新型采用的技术方案还在于,包括2组或2组以上的XYZ三轴移动组件与探入臂组件。
较佳的,其中一组上述的XYZ三轴移动组件中,可以省去一套Y轴作动器与Y轴移动滑轨。
较佳的,所述X、Y、Z轴作动器及X、Y、Z轴移动滑轨可以互相交换位置。
较佳的,所述X、Y、Z轴作动器可以是步进电机、交流伺服电机、直流电机、直线电机、气动气缸等主动驱动元件。
较佳的,所述探入臂的长度大于待装物料瓶的深度。
较佳的,所述多组探入臂的总横截面积小于待装物料瓶的最小口部面积。
较佳的,所述多组探入臂的每一个探入臂,均可以通过各自的XYZ三轴移动组件,移动到待装物料瓶的瓶口中心位置。
较佳的,所述多组XYZ三轴移动组件通过其各自的第一固定板互相连接固定。
本实用新型的块状物料自动装瓶装置通过上述技术方案,能够快速高效地将较大块状物料有序装入瓶中,从而增强了相关工厂生产线的生产效率,减少了人工操作与人力成本,也减少了装瓶过程中的物料损伤与错漏,同时使装瓶后的物料排列整齐美观。同时本实用新型结构简单、容易安装、成本低廉,达到了有益的技术效果。
附图说明
为了更清楚地说明本实用新型,下面对本实用新型附图作简单的介绍。
图1是本实用新型自动装瓶装置的立体结构图;
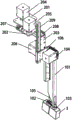
图2是其中一组XYZ三轴移动组件与探入臂组件的立体结构图;
图3是待装瓶块状物料的立体图;
图4是容器瓶剖视图;
图5是容器瓶与多块待装入块状物料的大小比例关系图;
图6是多块块状物料装入瓶内后的俯视图;
图7是本实用新型自动装瓶装置在吸取、固定块状物料时的立体结构图;
图8是本实用新型自动装瓶装置在容器瓶上方准备装填时的立体结构图;
图9是本实用新型自动装瓶装置在容器瓶上方准备装填时的俯视图;
图10是本实用新型自动装瓶装置正在装填块状物料时的立体结构图。
附图标记说明
1-探入臂组件;2-XYZ三轴移动组件;3-块状物料;101-探入臂;102-物料固定支架;103- 物料固定元件;104-连杆作动器;105-连杆;106-探入臂连接件;201-第一固定板;202-第二固定板;203-第三固定板;204-Y轴作动器;205-X轴作动器;206-Z轴作动器;207-Y轴移动滑轨;208-X轴移动滑轨;209-Z轴移动滑轨;4-容器瓶。
具体实施方式
以下结合附图,对本实用新型上述的和另外的技术特征和优点作更详细的说明。
请参阅图1所示,其为本实用新型自动装瓶装置的立体结构图,本实施例中包括了三组所述的探入臂组件1与对应的XYZ三轴移动组件2。其中一组XYZ三轴移动组件省去了一套Y轴作动器与Y轴移动滑轨。
本实用新型自动装瓶装置的多组XYZ三轴移动组件通过各自的第一固定板互相连接固定,形成一个整体。
请参阅图2所示,其为一组XYZ三轴移动组件与探入臂组件的立体结构图。
本实用新型自动装瓶装置的探入臂组件包括探入臂101,其内部为空腔结构,所述探入臂101上部有连杆作动器104,下部有连接物料固定支架102;物料固定支架102,与所述探入臂101相连接,连接点位于所述探入臂101下端一侧边,使所述物料固定支架102可以围绕连接点转动;物料固定元件103,位于所述物料固定架102下,2个或2个以上所述物料固定元件103与所述物料固定支架102相连接。本实施例中,物料固定元件103使用的是负压真空吸盘,可以吸取或释放块状物料3。物料固定元件103也可以是夹具或其他可以固定或释放块状物料3的结构;连杆作动器104,位于所述探入臂101的上端,所述连杆作动器 104通过连杆105连接到物料固定支架102;连杆105,位于所述探入臂101内部空腔中,所述连杆105一端连接连杆作动器104,另外一端连接物料固定支架102;探入臂连接件106,位于探入臂101上端,与下述的Z轴移动滑轨209相连接。
本实用新型自动装瓶装置的XYZ三轴移动组件包括第一固定板201,其连接有Y轴作动器204和Y轴移动滑轨207;第二固定板202,其连接有X轴作动器205和X轴移动滑轨208;第三固定板203,其连接有Z轴作动器206和Z轴移动滑轨209;Y轴移动滑轨207,其连接有第一固定板201和第二固定板202;X轴移动滑轨208,其连接有第二固定板202和第三固定板203;Z轴移动滑轨209,其连接有第三固定板203和上述的探入臂连接件106;Y 轴作动器204,其固定在第一固定板201上,通过Y轴移动滑轨207,驱动所述的第二固定板 202发生位移;X轴作动器205,其固定在第二固定板292上,通过X轴移动滑轨208,驱动所述的第三固定板203发生位移;Z轴作动器206,其固定在第三固定板203上,通过Z轴移动滑轨209,驱动所述的探入臂101发生位移。
本实用新型自动装瓶装置所述X、Y、Z轴作动器及X、Y、Z轴移动滑轨其作用是驱动探入臂101在空间坐标系x,y,z三个方向上发生位移,所述X、Y、Z轴作动器及X、Y、Z轴移动滑轨可以互相交换位置而不影响其作用。
本实用新型自动装瓶装置所述X、Y、Z轴作动器可以是步进电机、交流伺服电机、直流电机、直线电机、气动气缸等主动驱动元件。
图3所示,其为块状物料3的立体图。
图4所示,其为待装入块状物料的容器瓶4的刨面图,所述瓶4的构成材料通常为玻璃,包括但不限于陶瓷、塑料、金属等。
图5所示,其为待装入块状物料的容器瓶4与多块待装入块状物料3的大小比例关系。本实施例中,待装入块状物料3为6块。
图6所示,其为块状物料3装入瓶4后的俯视图,所述块状物料3为6块,在瓶4内整齐排列,其整体尺寸大于瓶4的瓶颈尺寸。
请参阅图7所示,其为本实用新型块状物料自动装瓶装置在送料机构(图中未画出) 的协助下,吸取、固定住块状物料3的情形。
图8所示,其为本实用新型块状物料自动装瓶装置在固定好待装块状物料3后,在外部移动平台(图中未画出)的协助下,将探入臂101位于容器瓶4的正上方,准备装瓶。
图9所示,其为本实用新型块状物料自动装瓶装置准备装瓶状态的俯视图。通过XYZ 三轴移动组件对各自探入臂101的移位,使得其中一个探入臂101位于瓶4瓶口上方的中心位置,而其他探入臂101则处于避让位置。
请参阅图10所示,其为本实用新型块状物料自动装瓶装置正在装瓶的结构图。在连杆作动器104的作用下,物料固定支架102围绕与探入臂101的连接点转动,并使其上的物料固定元件103一起转动,带动块状物料3转动并处于倾斜位置,随后探入臂101向下移动并深入瓶4内。在块状物料3越过瓶4的瓶颈后,探入臂101向边缘移动以避开瓶4的瓶口中心位置,同时探入臂101继续向下移动,同时连杆作动器104驱动块状物料3从倾斜位置到达水平放置位置。
本实用新型自动装瓶装置所述探入臂101的长度大于瓶4的深度。
其余2组XYZ三轴移动组件2与探入臂组件1重复执行上述动作,直到所有块状物料3均已处于瓶4内的放置位置,三组探入臂101均处于瓶4的瓶口中。三组物料固定元件103依次释放块状物料3,随后三组探入臂101在各自的XYZ三轴移动组件2的作用下向上移动,退出瓶4,移动到下一次装填位置,准备重复上述装瓶动作。
本实用新型自动装瓶装置所述三组探入臂101的总横截面积小于待装物料瓶4的最小口部面积.
本实用新型的块状物料自动装瓶装置通过上述技术方案,能够快速高效地将块状物料有序装入瓶中,从而增强了相关工厂生产线的生产效率,减少了人工操作与人力成本,也减少了装瓶过程中的物料损伤与错漏,同时使装瓶后的物料排列整齐美观。同时本实用新型结构简单、容易安装、成本低廉,达到了有益的技术效果。
以上对本实用新型的描述是说明性的,而非限制性的,本专业技术人员理解,在权利要求限定的精神与范围之内可对其进行许多修改、变化或等效,但是它们都将落入本实用新型的保护范围内。
Claims (7)
1.一种块状物料自动装瓶装置,其特征在于,包括探入臂组件和XYZ三轴移动组件;
所述探入臂组件包括:
探入臂,所述探入臂内部为空腔结构,所述探入臂上部有连杆作动器,下部有连接物料固定支架;
物料固定支架,与所述探入臂相连接,连接点位于所述探入臂下端一侧边,使所述物料固定支架可以围绕连接点转动;
物料固定元件,位于所述物料固定支架下,两个以上所述物料固定元件与所述物料固定支架相连接;
连杆作动器,位于所述探入臂的上端,所述连杆作动器通过连杆连接到物料固定支架;
连杆,位于所述探入臂内部空腔中,所述连杆一端连接连杆作动器,另外一端连接物料固定支架;
探入臂连接件,位于探入臂上端;
所述XYZ三轴移动组件包括:
第一固定板,连接有Y轴作动器和Y轴移动滑轨;
第二固定板,连接有X轴作动器和X轴移动滑轨;
第三固定板,连接有Z轴作动器和Z轴移动滑轨;
Y轴移动滑轨,连接有所述第一固定板和所述第二固定板;
X轴移动滑轨,连接有所述第二固定板和所述第三固定板;
Z轴移动滑轨,连接有所述第三固定板和所述探入臂连接件;
Y轴作动器,固定在所述第一固定板上,通过Y轴移动滑轨,驱动所述第二固定板发生位移;
X轴作动器,固定在所述第二固定板上,通过X轴移动滑轨,驱动所述第三固定板发生位移;
Z轴作动器,固定在所述第三固定板上,通过Z轴移动滑轨,驱动所述探入臂发生位移。
2.如权利要求1所述的一种块状物料自动装瓶装置,其特征在于,包括两组以上的所述XYZ三轴移动组件和所述探入臂组件。
3.如权利要求1所述的块状物料自动装瓶装置,其特征在于,所述X轴作动器、Y轴作动器、Z轴作动器及X移动滑轨、Y移动滑轨、Z轴移动滑轨可以互相交换位置。
4.如权利要求1所述的块状物料自动装瓶装置,其特征在于,所述连杆作动器、X轴作动器、Y轴作动器、Z轴作动器可以是步进电机、交流伺服电机、直流电机、直线电机、气动气缸中的一种。
5.如权利要求1所述的块状物料自动装瓶装置,其特征在于,所述探入臂的长度大于待装物料瓶的深度。
6.如权利要求2所述的块状物料自动装瓶装置,其特征在于,多组所述探入臂的总横截面积小于待装物料瓶的最小口部面积。
7.如权利要求2所述的块状物料自动装瓶装置,其特征在于,多组所述XYZ三轴移动组件之间通过多组所述第一固定板互相连接固定。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202021245212.3U CN214029263U (zh) | 2020-06-29 | 2020-06-29 | 块状物料自动装瓶装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202021245212.3U CN214029263U (zh) | 2020-06-29 | 2020-06-29 | 块状物料自动装瓶装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN214029263U true CN214029263U (zh) | 2021-08-24 |
Family
ID=77331613
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202021245212.3U Active CN214029263U (zh) | 2020-06-29 | 2020-06-29 | 块状物料自动装瓶装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN214029263U (zh) |
-
2020
- 2020-06-29 CN CN202021245212.3U patent/CN214029263U/zh active Active
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102013447B1 (ko) | 가공물 자동 적재장치 | |
| US10873000B2 (en) | Method and automatic production plant for printing on photovoltaic cells | |
| CN107682593B (zh) | 双摄模组组装设备 | |
| CN108068118B (zh) | 一种应用于真空互联系统的样品传送系统 | |
| CN103231920A (zh) | 一种上下料机 | |
| CN109015715B (zh) | 一种检瓶机机器人 | |
| CN109531235A (zh) | 工作机械 | |
| CN111566026A (zh) | 供给装置以及具备该供给装置的机器人系统 | |
| CN214029263U (zh) | 块状物料自动装瓶装置 | |
| CN109733878B (zh) | 西林瓶移送机械手 | |
| CN117542781A (zh) | 石英晶片夹具的自动化传送定位机构 | |
| US20020192067A1 (en) | High-precision transfer apparatus for depositing a part on an immobilised pallet | |
| CN113874303B (zh) | 用于运输至少一个物体、特别是药物容器的设备 | |
| CN209668152U (zh) | 一种用于洁净环境的圆盘高精度翻转装置 | |
| CN110203683A (zh) | 一种方形件的夹持装置及搬运系统 | |
| CN109397074A (zh) | 一种陶瓷盘转运设备 | |
| JP3974985B2 (ja) | 基板搬送装置 | |
| CA2456640C (en) | Inlay station with alignment assemblies and transfer tubes | |
| CN118431147A (zh) | 用于搬运磨削前后晶圆的搬运系统、方法、装置及晶圆减薄设备 | |
| CN118305669A (zh) | 用于晶圆减薄设备的搬运系统、方法、装置及晶圆减薄设备 | |
| CN111846958B (zh) | 一种3c产品转架设备及转架方法 | |
| JP2017150844A (ja) | 分注装置 | |
| CN216150270U (zh) | 盖板点胶装置 | |
| CN120513152A (zh) | 用于在气调环境内自动移动物体的装置和方法 | |
| CN212750825U (zh) | 一种晶圆盒内晶圆分离装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |