-
Die Erfindung betrifft einen Sensor und ein Verfahren zur Ermittlung einer Orientierung eines Sensorgehäuses in einem auf den Sensor einwirkenden Schwerefeld. Weiterhin betrifft die Erfindung eine Raumsonde mit einem ebensolchen Sensor. Die Erfindung findet Anwendung in der Raumfahrtindustrie.
-
Zur Erkundung des Weltraumes wurden und werden zahlreiche Raumsonden gebaut, die unterschiedliche Aufgaben erfüllen. Es ist bekannt, dass bei (große) Raumsonden, die bspw. gezielt auf Planeten gelandet werden sollen, Vorrichtungen zur Ermittlung der Orientierung der Raumsonde im Schwerefeld des Planeten erforderlich sind, bspw. um eine Landung der Raumsonde auf dem Planeten in der richtigen Orientierung zu gewährleisten. Hierzu sind eine Vielzahl von technisch hochentwickelten aktiven Lagesensoren und Orientierungssensoren bekannt. Diese Sensoren sind aufgrund ihrer Komplexität sehr teuer, ausfallgefährdet und müssen gegen Strahlung geschützt werden. Weiterhin beanspruchen sie viel Platz in der Raumsonde und haben einen hohen Strombedarf.
-
Aus der
DE 43 41 918 C2 ist ein elektromechanischer Lageänderungsschalter bekannt, der unter Einfluss der Änderung Lage seiner Mittelachse in einem Gravitationsfeld und unter Einfluss mechanischer Kräfte, mittels einer als elektrischer Anker zwischen trichterförmigen Gesamtmassekontakten und einer Vielzahl von Richtungskontakten wirkenden Kugel, die aus glattem, elektrisch leitendem Material gefertigt und unter Einfluss einer Mittelachslageänderung gegen die Gravitationsrichtung und/oder eine Beschleunigung lageveränderlich ist.
-
Aus der
DE 10 2006 016 523 A1 ist einen Kippsensor mit mindestens einem Körper bekannt, der entlang einer vorgegebenen Bahn bewegbar ist, und einer optoelektronischen Einheit zur Positionsbestimmung des Körpers, wobei der Kippsensor oberflächenmontierbar ist.
-
Aus der
DE 102 61 961 A1 ist ein Neigungssensor bekannt, der eine Bahn aus einem Spritzguss-Polymerkunststoff, ein entlang der Bahn bewegliches Element, wobei eine Stellung des beweglichen Elements entlang der Bahn von einer Neigung der Bahn bezüglich einer Bezugsstellung abhängt, und eine Erfassungseinrichtung zum Erfassen der Stellung des beweglichen Elements entlang der Bahn und/oder einer zeitlichen Änderung der Stellung des beweglichen Elements entlang der Bahn umfasst.
-
Aus der
EP 0 587 618 B1 ist ein einen Stellungssensor bekannt, bestehend aus einem Gehäuse, das eine Flüssigkeit enthält, einer im wesentlichen runden Kugel, die frei in der Flüssigkeit schwebt und einem Mittel, um eine direkte Berührung der Kugel mit dem Gehäuse zu vermeiden, wobei durch aktive Mittel sichergestellt wird, dass die Kugel in Bezug auf die Flüssigkeit neutral schwimmt und Mittel zur Feststellung und Übertragung der Ausrichtung der Kugel vorhanden sind.
-
Aus der
WO2004/020943 A1 ist ein Kippsensor mit einer sich in einem Innenraum des Kippsensors bewegenden Kugel bekannt, die sich durch Wirkung einer Gravitationskraft zwischen zwei Positionen bewegt sofern der Kippsensor um eine Achse mit einem bestimmten Drehmoment gedreht wird.
-
Schließlich ist aus der
JP 11 351 845 A ein Neigungssensor für vier oder mehr Richtungen bekannt, wobei der Neigungssensor einen Innenraum in Form eines Polyeders mit einer darin beweglichen Metallkugel umfasst. Die Ermittlung der Neigung des Sensors in einem Schwerefeld basiert auf der Ermittlung der Lage der Metallkugel im Innenraum. Hierzu wird der Innenraum mittels Lichtstrahlen abgetastet, die von mehreren Lichtquellen ausgehen und mehreren Lichtsensoren empfangen werden.
-
Für (kleine) Raumsonden, die auf kleinen Himmelskörpern, wie bspw. Kometen oder Asteroiden landen sollen, sind die bekannten Lage- und Orientierungssensoren nicht geeignet, da sie zu schwer und zu teuer sind, sowie einen zu großen Platzbedarf haben. Gleichwohl ist es für derartige kleine Raumsonden je nach Anwendung ebenfalls erforderlich die Orientierung der Raumsonde in Bezug auf den Himmelkörper zu kennen, um bspw. die von der Raumsonde erfassten Messergebnisse beurteilen zu können.
-
Die hier vorgestellte Erfindung beschreibt eine Methode, wie ein passiver Lagesensor kompakt und strahlungsfest realisiert werden kann, so dass er für kleine kompakte Explorationssysteme verwendet werden kann.
-
Aufgabe der Erfindung ist es, einen Sensor und ein Verfahren anzugeben, die eine einfache, nicht störanfällige Ermittlung einer beliebigen dreidimensionalen Orientierung des Sensors in einem Schwerefeld ermöglichen. Der Sensor soll günstig herstellbar sein, eine geringe Masse, ein geringes Bauvolumen aufweisen, zuverlässig arbeiten, einen geringen Energiebedarf haben und insbesondere als Orientierungssensor für Raumsonden geeignet sein.
-
Die Erfindung ergibt sich aus den Merkmalen der unabhängigen Ansprüche. Vorteilhafte Weiterbildungen und Ausgestaltungen sind Gegenstand der abhängigen Ansprüche. Weitere Merkmale, Anwendungsmöglichkeiten und Vorteile der Erfindung ergeben sich aus der nachfolgenden Beschreibung, sowie der Erläuterung von Ausführungsbeispielen der Erfindung, die in den Figuren dargestellt sind.
-
Der vorrichtungsgemäße Aspekt der Aufgabe ist mit einem Sensor zur Ermittlung einer Orientierung eines Sensorgehäuses in einem auf den Sensor einwirkenden Schwerefeld gelöst. Unter dem Begriff „Schwerefeld” wird vorliegend das Feld der Schwerebeschleunigung, d. h. die am jeweiligen Ort des Sensors auf den Sensor einwirkende Beschleunigung als der Vektorsumme von Gravitationsbeschleunigung und Zentrifugalbeschleunigung, verstanden. Unter dem Begriff „Orientierung” wird vorliegend die Ausrichtung/die Drehung, insbesondere des Sensorgehäuses, gegenüber einem Bezugssystem bzw. einer ausgezeichneten Richtung (der Schwerkraft) verstanden. Unter dem Begriff ”Kugel” werden vorliegend neben dem gebräuchlichen Wortsinn „Kugel”: Rotationsfläche oder spezielle Fläche zweiter Ordnung, beschrieben als die Menge aller Punkte im dreidimensionalen euklidischen Raum, deren Abstand von einem festen Punkt des Raumes gleich einer gegebenen positiven reellen Zahl r ist, auch Polyeder, insbesondere catalanische Körper verstanden.
-
Der erfindungsgemäße Sensor umfasst zumindest das Sensorgehäuse mit einem Gehäuseinnenraum in Form einer Kugel, eine innerhalb des Gehäuseinnenraums bewegliche Kugel mit einer leitenden Oberfläche, eine Vielzahl von an/auf einer Innenseite des Sensorgehäuses voneinander beabstandet und verteilt angeordneten elektrischen Kontakten, die jeweils voneinander und vom Sensorgehäuse elektrisch isoliert sind, und eine mit den elektrischen Kontakten verbundene Auswerteeinheit, die derart ausgeführt und eingerichtet ist, dass die Orientierung des Sensorgehäuses im Schwerefeld durch eine Auswertung eines elektrischen Schaltzustandes der Kontakte ermittelbar ist. Der Schaltzustand der elektrischen Kontakte ist dadurch änderbar, dass die Kugel durch eine auf diese einwirkende Schwerkraft an eine von einer Richtung der Schwerkraft abhängige Position auf der Innenseite des Sensorgehäuses bewegt wird und dort zwischen mindestens zwei elektrischen Kontakten über die leitende Kugeloberfläche eine elektrisch leitende Verbindung herstellt. Durch diese leitende Verbindung zwischen den mindestens zwei Kontakten wird der Schaltzustand dieser mindestens zwei Kontakte geändert, d. h. sie sind dann leitend miteinander verbunden. Da die Positionen der einzelnen elektrischen Kontakte auf/an der Innenseite des Gehäuseinnenraums bekannt sind, kann aus der Ermittlung derjenigen Kontakte, deren Schaltzustand sich geändert hat, zunächst die Richtung der auf den Sensor wirkenden Schwerkraft und damit die Orientierung des Sensorgehäuses im Schwerefeld bestimmt werden.
-
Die Kugel steht mit dem Sensorgehäuse bevorzugt nur über die dort angeordneten elektrischen Kontakte in Kontakt. Die elektrischen Kontakte sind hierzu an in der Innenseite des Sensorgehäuses derart verteilt angeordnet, dass für jede Lage, in der die Kugel mit dem Sensorgehäuse in Kontakt steht, die Kugel mindestens zwei elektrische Kontakte miteinander elektrisch leitend verbindet. Der Kugeldurchmesser, das Volumen und die Form des Volumens im Gehäuseinneren, in dem sich die Kugel frei bewegen kann, sind weiterhin derart aufeinander abgestimmt, dass die Kugel in zumindest einer Position in diesem Volumen keinen Kontakt zu einem der elektrischen Kontakte hat und andererseits das Volumen in dem sich die Kugel frei bewegen kann ohne mit den mindestens zwei Kontakten in Kontakt zu stehen minimal ist, so dass der Sensor eine kurze Reaktionszeit aufweist und eine Beschädigung des Sensors aufgrund auftretender Beschleunigungen und damit großer Geschwindigkeiten der Kugelverhindert wird.
-
Eine bevorzugte Weiterbildung des erfindungsgemäßen Sensors zeichnet sich dadurch aus, dass der Gehäuseinnenraum die Form einer Kugel, eines Quaders oder eines regelmäßigen Polyeders hat. Die elektrischen Kontakte weisen bevorzugt eine Kontaktfläche in Form eines Kreises, eines Rechtecks oder eines regelmäßigen Polygons auf. Zur Dämpfung der Bewegung der Kugel im Gehäuseinnenraum weist der Gehäuseinnenraum bevorzugt eine elektrisch nicht leitende Flüssigkeit auf. Dies führt dazu, dass bei auf den Sensor einwirkenden starken Beschleunigungen, die daraus resultierende Geschwindigkeit der Kugel nicht so groß wird, dass der Sensor beschädigt oder zerstört wird.
-
Eine weitere bevorzugte Weiterbildung zeichnet sich dadurch aus, dass der Gehäuseinnenraum evakuiert ist. Dies bewirkt eine besonders kurze Reaktionszeit des Sensors. Bevorzugt wird weiterhin die Kugel als Hohlkörper ausgebildet und/oder aus einem Material mit geringem spezifischen Gewicht gefertigt.
-
Der erfindungsgemäße Sensor zeichnet sich weiterhin dadurch aus, dass die Auswerteeinheit ein Mikroprozessor ist, mit dem zur Ermittlung der Position der Kugel auf der Innenseite des Sensorgehäuses, zyklisch an jeden der elektrischen Kontakte eine Spannung anlegbar ist und benachbarte oder alle anderen Kontakte auf Anliegen einer Spannung geprüft werden. Wird diese Spannung an einen Kontakt angelegt, der mit der Kugel in elektrisch leitender Verbindung steht, so kann diese Spannung an allen weiteren elektrischen Kontakten abgegriffen werden, mit denen über die Kugel ebenfalls ein elektrisch leitender Kontakt besteht.
-
Der verfahrensgemäße Aspekt der Aufgabe wird durch ein Verfahren zur Ermittlung einer Orientierung eines Sensorgehäuses in einem auf den Sensor einwirkenden Schwerefeld erfüllt, wobei der Sensor das Sensorgehäuse mit einem Gehäuseinnenraum in Form einer Kugel, eine innerhalb des Gehäuseinnenraums bewegliche Kugel mit einer leitenden Oberfläche, eine Vielzahl von an/auf einer Innenseite des Gehäuses, voneinander beabstandet und verteilt angeordneten elektrischen Kontakten, die voneinander und vom Sensorgehäuse elektrisch isoliert sind, und eine mit den elektrischen Kontakten verbundene Auswerteeinheit umfasst, die die Orientierung des Sensorgehäuses im Schwerefeld durch Auswerten eines elektrischen Schaltzustandes der Kontakte ermittelt. Dabei wird der einwirkende Schaltzustand der Kontakte dadurch geändert, dass die Kugel durch eine auf diese Schwerkraft an eine von einer Richtung der Schwerkraft abhängige Position auf der Innenseite des Sensorgehäuses bewegt wird, und die Kugel an der Position durch eine elektrisch leitende Verbindung zwischen mindestens zwei der Kontakte über die elektrisch leitende Kugel den Schaltzustand der mindestens zwei Kontakte ändert und weiterhin die Auswerteeinheit ein Mikroprozessor ist, mit dem zur Ermittlung der Position der Kugel auf der Innenseite des Sensorgehäuses, zyklisch an jeden der elektrischen Kontakte eine Spannung angelegt wird und benachbarte oder alle anderen Kontakte auf Anliegen einer Spannung geprüft werden.
-
Weitere bevorzugte Ausgestaltungen des erfindungsgemäßen Verfahrens ergeben sich aus einer analogen Anwendung der zuvor zum erfindungsgemäßen Sensor gemachten Ausführungen auf das erfindungsgemäße Verfahren.
-
Schließlich betrifft die Erfindung eine Raumsonde mit einem vorbeschriebenen erfindungsgemäßen Sensor, wobei eine Orientierung der Raumsonde auf Basis der ermittelten Orientierung des Sensorgehäuses im Schwerefeld und einer bekannten Lageanordnung des Sensors an der Raumsonde ermittelbar ist. Der erfindungsgemäße Sensor ist einfach aufgebaut, wartungsfrei, kostengünstig und mit geringer Sensormasse herzustellen. Die Winkelauflösung der mit dem Sensor ermittelbaren Orientierung ist u. a. abhängig von der Flächendichte der auf der Innenseite des Sensorgehäuses angeordneten elektrischen Kontakte. Je größer die Flächendichte, desto größer ist die Winkelauflösung der mit dem Sensor ermittelbaren Orientierung.
-
Weitere Vorteile, Merkmale und Einzelheiten ergeben sich aus der nachfolgenden Beschreibung, in der ein Ausführungsbeispiel im Einzelnen beschrieben ist, in Zusammenhang mit den Zeichnungen.
-
Es zeigen:
-
1 eine schematische Darstellung eines Querschnitts durch einen erfindungsgemäßen Sensor, und
-
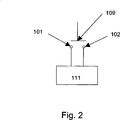
2 eine Prinzipschaltung zur Auswertung des Schaltzustandes der elektrischen Kontakte.
-
1 zeigt eine schematische Darstellung eines Querschnitts durch einen erfindungsgemäßen Sensor. Das dargestellte Ausführungsbeispiel umfasst die leitende Kugel 109 in einem geschlossenen Gehäuse 113. Das Gehäuse 113 weist auf allen Innenseiten in Richtung Gehäuseinneres ragende Rippen 1-8 auf, die ihrerseits jeweils elektrisch leitende Kontakte 101–108 aufweisen. Die Kontakte 101–108 sind gegenüber dem Gehäuse 113 und den anderen Rippen 1–8 elektrisch isoliert. Die elektrischen Kontakte 101–108 sind mit dem Auswertmittel 111 über elektrische Leitungen 112 verbunden. Die elektrischen Kontakte 101–108 werden vorliegend vom Auswertemittel 111 derart elektrisch beschaltet, dass immer ein aktiver, unter Spannung stehender Kontakt, bspw. 101, 103, 105, 107, neben einem nicht unter Spannung stehenden Kontakt, bspw. 102, 104, 106, 108 zu liegen kommt.
-
2 zeigt hierzu eine Prinzipschaltung zur Auswertung des Schaltzustandes für ein solches Paar elektrischer Kontakte 101, 102. Die Funktionsweise des vorliegenden Sensors beruht darauf, dass selbst bei geringster Schwerkraft, die leitende Kugel 109 in Richtung der Schwerkraft 110 bewegt wird uns so eine elektrisch leitende Verbindung zwischen den Kontakten 101 und 102 hergestellt wird, die zu einer Schaltzustandsänderung der Kontakte führt, welche wiederum zur Ermittlung der Orientierung im Schwerefeld vom Auswertemittel ausgewertet werden kann.
-
In der 1 ist dies dadurch verdeutlicht, dass der Mittelpunkt der Kugel 109 von der Position 104a durch Einwirkung der Schwerkraft 110, bspw. nach Landung einer mit dem Sensor bestückten Raumsonde auf einem Kometen, im Bild nach unten bewegt wird, so dass über die elektrisch leitende Oberfläche der Kugel eine elektrische Verbindung zwischen dem Kontakt 101 und dem Kontakt 102 zustande kommt. Dies sorgt dafür, dass eine Spannung, die zyklisch von dem Auswertemittel 111, einem Microcontroller, DSP oder FPGA, an jeden Kontakt 101, 103, 106, 107 angelegt wird, über eine entsprechende digitale Auswertung erkannt wird. Durch die Zuordnung zwischen dem mit Spannung versorgten Kontakt 101, 103, 106, 107 und reagierendem Kontakt kann somit die Lage der Kugel 109 innerhalb der Gehäuseinneren bzw. die Position 114b hinreichend genau ermittelt werden.
-
Bei der Dimensionierung des Gehäuseinneren, in dem sich die Kugel 109 frei bewegen kann sollte beachtet werden, dass der Abstand der einzelnen Rippen 1–8 in Bezug auf die Kugel 109 so groß ist, dass kein unbeabsichtigter Kontakt zwischen Kugel 109 und den elektrischen Kontakten 101–108 zustande kommt. Weiterhin sollte der Abstand so klein gewählt werden, dass ein gewünschter Kontakt zwischen Kugel 109 und den elektrischen Kontakten 101–108 sicher geschlossen wird. Des Weiteren sollte beachtet werden, dass das Gehäuseinnere, in dem sich die Kugel 109 frei bewegen kann, der Kugel 109 nicht viel Bewegungsfreiheit lässt, um a) eine schnelle Anzeige zu ermöglichen und b) bei starken Beschleunigungen die resultierende Geschwindigkeit der Kugel nicht so groß werden zu lassen, dass die Kammer zerstört wird. Zu diesem Zweck kann das Gehäuseinnere mit einer nichtleitenden Flüssigkeit (z. B. Öl) gefüllt werden, um die Bewegung der Kugel 109 zu dämpfen.
-
Für einen Einsatz des vorliegenden Sensors bei kleinen leichten Raumsonden, bei denen das Systemgewicht sehr stark reduziert ist, besteht die Möglichkeit, die Kugel 109 als Hohlkörper zu realisieren und das Gehäuseinnere zu evakuieren. Damit wird in letzter Konsequenz ein ungedämpftes System realisiert, dass aber durch die stark verkleinerte Masse der Kugel 109 unkritisch bleibt.
-
Wenn die Positionsauflösung und damit die erzielbare Winkelauflösung der Orientierung der gezeigten Anordnung nicht ausreichend sind, wird um die Kugel 109 anstelle des Rippenquaders ein Polyeder mit mehreren Kontaktflächen 101–108 bzw. Kontaktpunkten verwendet. Dieser ist bevorzugt derart gestaltet, dass sich die Kugel 109 im allgemein räumlichen Fall auf jeweils drei verschiedenen Kontaktelementen 101–108 stabil abstützt und diese elektrisch verbindet. Jedes so entstehende Tripel von Kontaktelementen 101–108 beschreibt eine eindeutige Raumrichtung bezogen auf den Polyeder. Da nicht jede beliebige Kombination von Kontaktelementen 101–108 möglich ist, sondern nur unmittelbar benachbarte Kontakte 101–108 durch die Kugel 109 verbunden werden können, ist es möglich mehrere hinreichend weit voneinander entfernte Kontaktelemente 101–108 in einer Gruppe mit gemeinsamem Anschluss zusammenzufassen, um die Anzahl der nötigen Anschlussleitungen 112 zu dem Auswertemittel 111 möglichst gering zu halten. Bei dieser Variante muss lediglich darauf geachtet werden, dass durch die Nachbarschaftsverhältnisse jede Dreierkombination von Kontaktgruppen weiterhin eindeutig bleiben, d. h. dass drei Gruppen nur an einer Stelle im Polyeder ein Dreieck von benachbarten Kontakten 101–108 aufspannen. Wie oben bereits beschrieben, erfolgt auch in diesem allgemeineren Fall die Auswertung dadurch, dass einzelne Kontaktgruppen stimuliert werden und die Antworten der anderen ausgewertet werden. Da die Stimulation und die Auswertung aller Schaltkreise bevorzugt in einem digitalen Baustein (Microcontroller, DSP oder FPGA) erfolgt, benötigt der erfindungsgemäße Sensor keinerlei Interfacebeschaltung um Signalpegel zu adaptieren. Einzig die Anzahl der Kontaktflächen 101–108, die durch die gewünschte räumliche Auflösung vorgegeben wird, bestimmt die elektrischen Eigenschaften des Interfaces.
-
Bei einem Einsatz des beschriebenen Sensors an Bord einer Raumsonde ist die Lage, d. h. der Ort und die Orientierung des Sensors an der Raumsonde, in Bezug auf die Raumsonde bekannt. Mit der von dem Sensor ermittelten Orientierung kann die Orientierung der Raumsonde in Bezug auf das, auf die Raumsonde wie auch den Sensor einwirkende Schwerefeld eindeutig bestimmt werden. In der gezeigten Konfiguration des Sensors können Lagen von 45 Grad in Bezug auf das Schwerkraftrichtung 110 angezeigt werden, da die Kugel 109 in diesem Fall über eine Raumecke des Gehäuseinneren die elektrischen Kontakte 101–108 schließen kann.
-
Bezugszeichenliste
-
- 1–8
- Kontaktsockel
- 100
- Sensor
- 101–108
- elektrische Kontakte, die jeweils vom Gehäuse elektrisch isoliert sind
- 109
- Kugel, Polyeder, catalanischer Körper mit elektrisch leitender Oberfläche
- 110
- Schwerkraft = Summe aus Gravitationskraft und Zentrifugalkraft
- 111
- Auswerteeinheit
- 112
- elektrische Leitungen
- 113
- Sensorgehäuse
- 114a
- Position der Kugel, ohne Berührung eines der elektrischen Kontakte
- 114b
- Position der Kugel auf der Innenseite des Sensorgehäuses, die sich durch eine auf die Kugel einwirkende Schwerkraft in Abhängigkeit der Richtung der Schwerkraft ergibt