-
Hintergrund
-
Technisches Gebiet
-
Die vorliegende Erfindung betrifft einen Kraft-Drehmoment-Sensor und ein Verfahren zur Herstellung des Kraft-Drehmoment-Sensors. Insbesondere betrifft die Erfindung einen Kraft-Drehmoment-Sensor nach der Art einer Dehnungsmesseinrichtung und ein Verfahren zur Herstellung des Kraft-Drehmoment-Sensors, welcher eine multi-axiale Kraft und Drehmoment messen und Herstellungskosten sparen kann, und Schwierigkeiten beim Anbringen einer Messeinrichtung überwinden sowie Defekte und Fehler sensieren kann, welche während des Anbringens der Messeinrichtung entstehen.
-
Hintergrund
-
Automatisierte Einrichtungen, welche Roboter verwenden, wurden in großem Maße in verschiedenen Industriezweigen jahrelang verwendet, einschließlich Präzisionsschweißen und Montageabläufe an Fließbändern für den Automobilbereich. Um die auf Robotern basierten automatisierten Einrichtungen zu betreiben, ist es notwendig, die Position eines Roboters sowie die Kraft und das Drehmoment zu messen und gleichzeitig auf Grundlage eines Feedbacksignals zu steuern, welche auf die mit den Robotern verbundenen an verschiedenen Orten angeordneten Werkzeuge einwirken. Insbesondere muss, um komplexe und schwierige Aufgaben zu automatisieren, eine Positionssteuerung und Leistungssteuerung der Roboterarme und der voneinander entfernt angeordneten Werkzeuge gleichzeitig ausgeführt werden.
-
Ein Positionssteuerungsverfahren wird hauptsächlich für derzeit verwendete Roboter benutzt. Mit technologischem Fortschreiten der Anwendungen und der Anforderungen an die Technologie der Roboter an eine Umgebung, in welcher Mensch und Roboter zusammenarbeiten, wird von Servicerobotern erwartet, verschiedene Aufgaben mit einer einzigen Vorrichtung auszuführen, wobei Verfahren zum Betreiben dieser Roboter in praktische Kraft-Steuerungsverfahren umgeändert werden. Daher wächst auch das Interesse an Kraft-Drehmoment-Sensoren zunehmend, welche in Bereichen der Robotik angewendet werden.
-
Ein Kraft-Drehmoment-Sensor detektiert von außen einwirkende Kräfte, welche auf den entfernt angeordneten Mechanismus (zum Beispiel entfernt angeordnete Werkzeuge, welche an einem Roboterarm installiert sind) einwirken, und spielt eine wichtige Rolle bei Kraft-gesteuerten Robotern, und wird daher zukünftig ein wichtiger Servicetyp-Roboter sein.
-
Insbesondere können die Messverfahren der herkömmlichen Kraft-Drehmoment-Sensoren, welche auf Robotern und entfernt angeordnete Mechanismen einwirkende externe Kräfte detektieren, grob in Verfahren eingeteilt werden, welche eine Deformation eines elastischen Körpers mit einer Dehnungsmesseinrichtung verwenden, dann Verfahren, welche piezoelektrische Materialien verwenden, und schließlich Verfahren, welche einen Stewart-Platform-Mechanismus mit Linear-Voltage-Different-Transforms (LVDT) verwenden.
-
US-Patentanmeldung mit Veröffentlichungsnummer 2010/0000327 offenbart einen Kraft-Drehmoment-Sensor von der Art einer Dehnungsmesseinrichtung. Der Sensor umfasst zwei Flansche, von denen jeder einen flexiblen Abschnitt und einen mit dem Zentrum davon verbundenen Verbindungsabschnitt umfasst. Der Sensor misst eine Widerstandsänderung unter Verwendung von zwei oder vier Dehnungsmesseinrichtungen. In diesem Fall sind die Dehnungsmesseinrichtungen in einer geraden Linie auf einer Ebene eines unteren Flansches angeordnet, wobei die Dehnungsmesseinrichtungen in orthogonalen Richtungen mit Bezug auf jede Achse befestigt sind. Ebenso offenbart US-Patentanmeldung mit Veröffentlichungsnummer 2008/0184819 einen Sensor von der elektrostatischen Art.
-
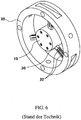
6 ist eine Ansicht eines typischen sechsachsigen Kraft-Drehmoment-Sensors, welcher eine Deformation eines elastischen Körpers mit einer Dehnungsmesseinrichtung misst. Ein Werkzeug-Verbindungsabschnitt 10 ist mit einem entfernt gelegenen Mechanismus (Werkzeug) verbunden, und ein Roboter-Verbindungsabschnitt 20 ist mit einem Roboterarm oder dergleichen verbunden.
-
In dem obigen Kraft-Drehmoment-Sensor sind die äußere Umfangsfläche des Werkzeug-Verbindungsabschnitts 10 und die innere Umfangsfläche des Roboter-Verbindungsabschnitts 20 integral durch drei elastische Balken 30 in integraler Weise miteinander verbunden, von denen jeder mechanisch durch eine Kraft oder ein Drehmoment deformiert wird. In der Art eines Torsionsbalkens können die elastischen Balken 30 durch eine Kraft oder ein Drehmoment elastisch verformt werden. In diesem Fall ist eine Mehrzahl von Dehnungsmesseinrichtungen 32 an den drei elastischen Balken befestigt, um eine Kraft und ein Drehmoment entsprechend der mechanischen Deformation der elastischen Balken 30 zu messen.
-
Ein solcher herkömmlicher sechs-achsiger Kraft-Drehmoment Sensor muss in der Erwartung konstruiert sein, dass sich die Struktur des elastischen Balkens ändert, wobei der Balken eine Struktur aufweist, bei welcher die Empfindlichkeit des Sensors gemäß der Leistung der an den elastischen Balken befestigten Dehnungsmesseinrichtungen bestimmt ist. Der herkömmliche sechs-achsige Kraft-Drehmoment-Sensor kann sowohl den Betrag als auch die Richtung der dreidimensionalen Kraft-Komponenten (Fx, Fy und Fz) und der dreidimensionalen Drehmoment-Komponenten (Mx, My und Mz) messen, wenn eine Kraft und ein Drehmoment ausgeübt werden. Da die Kraft- und Drehmoment-Komponenten jeder Richtung gegenseitig voneinander abhängen, werden teure Dehnungsmesseinrichtungen auf Siliziumbasis auf den elastischen Balken verwendet, um die Genauigkeit der Messung zu verbessern.
-
Obwohl der sechs-achsige Kraft-Drehmoment-Sensor, welcher an einem „Gelenk“-Abschnitt eines Roboters befestigt ist, eine ausreichende Empfindlichkeit zum Messen eines sechs-achsigen Kraft-Drehmoments in einem Signalmuster zeigt, weist sein elastischer Körper (elastischer Balken) eine komplizierte dreidimensionale Struktur auf, was einen Anstieg der Herstellungskosten verursacht. Dementsprechend ist es notwendig, einen Kosten-sparenden und effizienten Kraft-Drehmoment-Sensor für eine verbreitete Anwendung von Robotern zu entwickeln.
-
Die obige in diesem Hintergrund-Abschnitt offenbarte Information dient lediglich dem besseren Verständnis des Hintergrunds der Erfindung und kann deshalb Information enthalten, welche nicht Stand der Technik bildet, welcher dem lokalen Fachmann bereits bekannt ist.
-
Zusammenfassung der Offenbarung
-
Die vorliegende Erfindung stellt einen Kraft-Drehmoment-Sensor nach der Art einer Dehnungsmesseinrichtung und ein Verfahren zur Herstellung des Kraft-Drehmoment-Sensors bereit, welcher eine mehrachsige Kraft und ein mehrachsiges Drehmoment messen und Herstellungskosten einsparen kann, und Schwierigkeiten beim Befestigen einer Messeinrichtung überwinden und Defekte und Fehler sensieren kann, welche beim Anbringen der Messeinrichtung erzeugt werden.
-
Unter einem Aspekt stellt die vorliegende Erfindung ein Verfahren zum Herstellen eines Kraft-Drehmoment-Sensors nach der Art einer Dehnungsmesseinrichtung bereit. Dieses Verfahren umfasst ein Bilden einer ersten Sensorstruktur mit einem konvexen Abschnitt auf einer Verbindungsfläche davon und einer zweiten Sensorstruktur mit einem konkaven Abschnitt auf einer Verbindungsfläche davon, welcher mit dem konvexen Abschnitt der ersten Sensorstruktur verbunden ist; Bilden eines Mess-Films durch Anordnen einer Dehnungsmesseinrichtung auf einem flexiblen Film; in kompressiver Weise dazwischen Anordnen des Mess-Films zwischen der Verbindungsfläche der ersten Sensorstruktur mit dem konvexen Abschnitt und einer Verbindungsfläche der zweiten Sensorstruktur mit dem konkaven Abschnitt, um den Mess-Film anfänglich zu deformieren; und Befestigen der ersten Sensorstruktur an der zweiten Sensorstruktur, wenn der Mess-Film anfänglich deformiert wird.
-
In einer beispielhaften Ausführungsform kann die erste Sensorstruktur und die zweite Sensorstruktur umfassen: ein äußeres Kopplungsteil, welches entlang einer Kante davon angeordnet ist; ein zentrales Kopplungsteil, welches in dem äußeren Kopplungsteil angeordnet und von dem äußeren Kopplungsteil beabstandet ist; und eine Mehrzahl von Verbindungsteilen, welche zwischen dem äußeren Kopplungsteil und dem zentralen Kopplungsteil verbunden sind, welche voneinander beabstandet sind. Insbesondere sind das äußere Kopplungsteil, das zentrale Kopplungsteil sowie die Mehrzahl der Verbindungsteile integral ausgebildet, wobei das äußere Kopplungsteil und das zentrale Kopplungsteil mit einer unterschiedlichen Dicke ausgebildet sind, so dass die zentralen Kopplungsteile jeder Sensorstruktur jeweils den konvexen Abschnitt und den konkaven Abschnitt umfassen.
-
In einigen Ausführungsformen kann der Mess-Film Vorsprünge auf beiden Seiten davon aufweisen, wobei die Vorsprünge jeweils in das äußere Kopplungsteil und das zentrale Kopplungsteil eingefügt sein können. Der Mess-Film kann durch Anbringen von Dehnungsmesseinrichtungen auf einem flexiblen und ebenen Film in multi-axialen Richtungen hergestellt sein.
-
In noch einer weiteren beispielhaften Ausführungsform können die erste Sensorstruktur und die zweite Sensorstruktur jeweils eine Mehrzahl von Kopplungsöffnungen zur Kopplung mit externen Einrichtungen in dem äußeren Kopplungsteil und dem zentralen Kopplungsteil davon aufweisen, wobei die Vorsprünge des Mess-Films jeweils in die Kopplungsöffnungen des äußeren Kopplungsteils und des zentralen Kopplungsteils eingefügt sein können.
-
In noch einer weiteren beispielhaften Ausführungsform können die Vorsprünge des in die Kopplungsöffnungen des äußeren Kopplungsteiles eingefügten Mess-Films eine von den Vorsprüngen des in die Kopplungsöffnungen des zentralen Kopplungsteiles eingefügten Mess-Films verschiedene Höhe aufweisen, wobei eine Höhen-Differenz zwischen den Vorsprüngen die gleiche wie eine Höhen-Differenz zwischen dem zentralen Kopplungsteil und dem äußeren Kopplungsteil jeder Sensorstruktur sein kann.
-
Unter einem weiteren Aspekt stellt die vorliegende Erfindung einen Kraft-Drehmoment-Sensor nach der Art einer Dehnungsmesseinrichtung bereit, welche durch ein oben beschriebenes Verfahren hergestellt ist, wobei der Sensor umfasst: eine erste Sensorstruktur mit einem konvexen Abschnitt auf einer Verbindungsfläche davon; eine zweite Sensorstruktur mit einem konkaven Abschnitt auf einer Verbindungsfläche davon; und einen Mess-Film, welcher durch Anordnen einer Dehnungsmesseinrichtung auf einem flexiblen Film und in kompressiver Weise Anordnen zwischen der Verbindungsfläche der ersten Sensorstruktur und der Verbindungsfläche der zweiten Sensorstruktur hergestellt ist, um anfänglich durch den konvexen Abschnitt der ersten Sensorstruktur und den konkaven Abschnitt der zweiten Sensorstruktur deformiert zu sein.
-
Andere Aspekte und beispielhaften Ausführungsformen der Erfindung werden im Folgenden erörtert.
-
Figurenliste
-
Die obigen und andere Merkmale der vorliegenden Erfindung werden nun detailliert mit Bezug auf bestimmte beispielhafte Ausführungsformen davon beschrieben, welche durch die begleitenden Zeichnungen dargestellt werden, welche hiernach lediglich zum Zwecke der Darstellung beschrieben werden, und daher die vorliegende Erfindung nicht beschränken sollen, und wobei:
- 1 eine perspektivische zusammengesetzte Ansicht eines Kraft-Drehmoment-Sensors gemäß einer beispielhaften Ausführungsform der vorliegenden Erfindung ist;
- 2 eine perspektivische Explosionsansicht eines Kraft-Drehmoment-Sensors gemäß einer beispielhaften Ausführungsform der vorliegenden Erfindung ist;
- 3 eine Draufsicht auf einen Mess-Film einschließlich eines Kraft-Drehmoment-Sensors nach der Art einer Dehnungsmesseinrichtung gemäß einer beispielhaften Ausführungsform der vorliegenden Erfindung ist;
- 4 eine Querschnittsansicht ist, welche einen Mess-Film vor einem Zusammenbau mit einer ersten und zweiten Sensorstruktur in einem Kraft-Drehmoment-Sensor gemäß einer beispielhaften Ausführungsform der vorliegenden Erfindung darstellt;
- 5 eine Querschnittsansicht ist, welche einen Zusammenbau eines Kraft-Drehmoment-Sensors gemäß einer beispielhaften Ausführungsform der vorliegenden Erfindung darstellt; und
- 6 eine Ansicht eines herkömmlichen sechs-achsigen Kraft-Drehmoment-Sensors unter Verwendung einer Deformation eines elastischen Körpers mit einer Dehnungsmesseinrichtung ist.
-
Bezugszeichen in den Zeichnungen umfassen einen Bezug zu den folgenden Elementen, wie im Folgenden unten erörtert wird:
- 100:
- Kraft-Drehmoment-Sensor
- 110:
- erste Sensorstruktur
- 111:
- äußerer Kopplungsabschnitt
- 112:
- zentraler Kopplungsabschnitt
- 113:
- Verbindungsteilabschnitt
- 114:
- Kopplungsöffnung
- 120:
- zweite Sensorstruktur
- 121:
- äußerer Kopplungsabschnitt
- 122:
- zentraler Kopplungsabschnitt
- 123:
- Verbindungsteil
- 124:
- Kopplungsöffnung
- 130:
- Mess-Film
- 131:
- Vorsprung
- 132:
- Dehnungsmesseinrichtung
-
Es wird darauf hingewiesen, dass die beigefügten Zeichnungen nicht notwendigerweise maßstabsgetreu sind, wobei sie eine etwas vereinfachte Darstellung verschiedener bevorzugter Merkmale zeigen, welche die grundsätzlichen Prinzipien der Erfindung erläutern sollen. Die spezifischen Design-Merkmale der vorliegenden Erfindung, wie sie hierin offenbart ist, einschließlich beispielsweise bestimmter Dimensionen, Ausrichtungen, Positionen sowie Formen werden teilweise durch die entsprechende Anwendungs- und Verwendungs-Umgebung bestimmt.
-
In den Zeichnungen betreffen Bezugszeichen durchgehend die gleichen oder äquivalente Teile der vorliegenden Erfindung in mehreren Figuren der Zeichnungen.
-
Detaillierte Beschreibung
-
Im Folgenden wird nun detailliert Bezug genommen auf verschiedene Ausführungsformen der vorliegenden Erfindung, das heißt Beispiele, welche in den begleitenden Zeichnungen dargestellt und unten erläutert sind. Während die Erfindung in Verbindung mit beispielhaften Ausführungsformen erläutert wird, wird darauf hingewiesen, dass die vorliegende Beschreibung die Erfindung nicht auf diese beispielhaften Ausführungsformen beschränken soll. Im Gegenteil, die Erfindung soll nicht nur die beispielhaften Ausführungsformen abdecken, sondern auch verschiedene Alternativen, Abänderungen, Äquivalente und andere Ausführungsformen, welche innerhalb des Grundprinzips und Umfangs der durch die beigefügten Ansprüche definierten Erfindung enthalten sein können.
-
Es wird bevorzugt, dass der Ausdruck „Fahrzeug“ bzw. „fahrzeugartig“ oder andere ähnliche hierin verwendete Ausdrücke allgemein Motorfahrzeuge umfassen, wie zum Beispiel Personenfahrzeuge einschließlich Sports Utility Vehicles (SUV), Busse, LKWs, verschiedene kommerzielle Fahrzeuge, Wasserkraft-Fahrzeuge, einschließlich einer Vielzahl von Booten und Schiffen, Luftfahrt-Fahrzeuge, und dergleichen, und Hybrid-Fahrzeuge, Elektrofahrzeuge, Plug-in-Hybrid-ElektroFahrzeuge, mit Wasserstoff angetriebene Fahrzeuge und mit anderen alternativen Kraftstoffen betriebene Fahrzeuge (zum Beispiel Kraftstoffe, welche aus Quellen gewonnen werden, welche keine Ölquellen sind) umfassen. Mit Bezug auf die vorliegende Beschreibung ist ein Hybrid-Fahrzeug ein Fahrzeug, welches zwei oder mehrere Antriebsquellen aufweist, beispielsweise sowohl Benzin-betriebene als auch Strom-betriebene Fahrzeuge.
-
Die obigen und weiteren Merkmale der Erfindung werden im Folgenden erörtert. 1 ist eine perspektivische zusammengesetzte Ansicht eines Kraft-Drehmoment-Sensors gemäß einer Ausführungsform der vorliegenden Erfindung, und 2 ist eine perspektivische Explosions-Ansicht eines Kraft-Drehmoment-Sensors gemäß einer Ausführungsform der vorliegenden Erfindung. 2 zeigt einen Mess-Film 130 vor dem Zusammenbau (zum Beispiel anfänglicher Zustand vor einer ersten Deformation). Eine auf der Oberfläche des Mess-Films 130 angeordnete Dehnungsmesseinrichtung ist in 2 nicht dargestellt (siehe zum Beispiel 3).
-
3 ist eine Draufsicht auf einen Mess-Film einschließlich einer Dehnungsmesseinrichtung in einem Kraft-Drehmoment-Sensor gemäß einer beispielhaften Ausführungsform der vorliegenden Erfindung. 4 ist eine Querschnittsansicht, welche einen Mess-Film vor dem Zusammenbau mit einer ersten und zweiten Sensorstruktur in einem Kraft-Drehmoment-Sensor gemäß einer beispielhaften Ausführungsform der vorliegenden Erfindung darstellt.
-
5 ist eine Querschnittsansicht, welche einen zusammengesetzten Kraft-Drehmoment-Sensor gemäß einer beispielhaften Ausführungsform der vorliegenden darstellt, welche einen zwischen einer ersten Sensorstruktur 110 von einer konvexen Art und einer zweiten Sensorstruktur 120 von einer konkaven Art nach dem Zusammenbau deformierten Mess-Film 130 zeigt.
-
Ein Kraft-Drehmoment-Sensor 100 kann einen einzelnen Mess-Film 130 umfassen, welcher in einem Anfangszustand deformiert ist. Der Kraft-Drehmoment-Sensor 100 kann eine erste Sensorstruktur 110, eine zweite Sensorstruktur 120, sowie einen Mess-Film 130 umfassen. Die erste Sensorstruktur 110 kann einen konvexen Abschnitt an der Verbindungsfläche davon aufweisen. Die zweite Sensorstruktur 120 kann einen konkaven Abschnitt an der Verbindungsfläche davon aufweisen, welche mit dem konvexen Abschnitt der ersten Sensorstruktur 110 verbunden ist. Der Mess-Film 130 kann in kompressiver Weise, das heißt wie ein Sandwich, zwischen den Verbindungsflächen der ersten und zweiten Sensorstruktur 110 und 120 angeordnet sein, um anfänglich deformiert zu werden.
-
Ein Verfahren zur Herstellung des Kraft-Drehmoment-Sensors 110 kann ein Bilden einer ersten Sensorstruktur 110 mit einem konvexen Abschnitt an der Verbindungsfläche davon und eine zweite Sensorstruktur 120 mit einem konkaven Abschnitt beinhalten, wobei der konkave Abschnitt mit dem konvexen Abschnitt der ersten Sensorstruktur 110 verbunden ist, wobei durch Anordnen einer Dehnungsmesseinrichtung 132 auf einem flexiblen Film ein Mess-Film 130 gebildet wird, welcher in kompressiver Weise zwischen der Verbindungsfläche der ersten Sensorstruktur 110 mit dem konvexen Abschnitt und der Verbindungsfläche der zweiten Sensorstruktur 120 mit dem konkaven Abschnitt angeordnet ist, um den Mess-Film anfänglich zu deformieren, wobei die erste Sensorstruktur 110 und die zweite Sensorstruktur 120 miteinander verbunden sind, wenn der Mess-Film 130 anfänglich deformiert wird.
-
Die erste Sensorstruktur 110 und die zweite Sensorstruktur 120 können miteinander verbunden sein, während der Mess-Film 130 in kompressiver Weise dazwischen angeordnet ist. Die erste und zweite Sensorstruktur 110 bzw. 120 kann jeweils äußere Kopplungsteile 111 bzw. 121, zentrale Kopplungsteile 112 bzw. 122 sowie eine Mehrzahl von Verbindungsteilen 113 bzw. 123 aufweisen. Die äußeren Kopplungsteile 111 und 121 können entlang des äußeren Umfangs oder der Kante des Sensors 100 angeordnet sein. Die zentralen Kopplungsteile 112 und 122 können an dem zentralen Abschnitt des Sensors 100 angeordnet sein, während sie jeweils von den äußeren Kopplungsteilen 111 und 121 in einem vorgegebenen/bestimmten Abstand voneinander beabstandet sind. Die Mehrzahl von Verbindungsteilen 113 und 123 kann in integraler Weise jeweils zwischen den äußeren Kopplungsteilen 111 und 121 und den zentralen Kopplungsteilen 112 und 122 verbunden sein.
-
In einer Ausführungsform können die äußeren Kopplungsteile 111 und 121 sowie die zentralen Kopplungsteile 112 und 122 jeweils eine Ringform aufweisen. In der obigen Struktur, in welcher die äußeren Kopplungsteile 111 und 121 und die zentralen Kopplungsteile 112 und 122 jeweils voneinander an der Außenseite und der Innenseite beabstandet sind, kann die Mehrzahl von Verbindungsteilen 113 und 123 zwischen den äußeren Verbindungsteilen 111 und 121 und den zentralen Verbindungsteilen 112 und 122 in der radialen Richtung verbunden sein.
-
In der ersten Sensorstruktur 110 und der zweiten Sensorstruktur 120 können die äußeren Kopplungsteile 111 und 121 und die zentralen Kopplungsteile 112 und 122 unterschiedliche Dicken aufweisen und sind deshalb an unterschiedlichen Abständen von der Verbindungsfläche zwischen der ersten und zweiten Sensorstruktur 110 und 120 angeordnet, wobei jeweils eine Dicken-Differenz zwischen den äußeren Kopplungsteilen 111 und 121 und den zentralen Kopplungsteilen 112 und 122 bereitgestellt wird.
-
Die erste Sensorstruktur 110 kann eine zentrale konvexe Struktur aufweisen, in welcher die Dicke des zentralen Kopplungsteils 112 größer ist als die des äußeren Kopplungsteils 111 auf Grundlage der Verbindungsfläche zwischen der ersten Sensorstruktur 110 und der zweiten Sensorstruktur 120. Dementsprechend kann das zentrale Kopplungsteil 112 einen konvexen Abschnitt der ersten Sensorstruktur 110 umfassen.
-
Im Gegensatz dazu kann die zweite Sensorstruktur 120 eine zentrale konkave Struktur aufweisen, bei welcher die Dicke des zentralen Kopplungsteiles 122 geringer ist als die des äußeren Kopplungsteiles 121 auf Grundlage der Verbindungsfläche zwischen der ersten Sensorstruktur 110 und der zweiten Sensorstruktur 120. Dementsprechend kann das zentrale Kopplungsteil 122 einen konkaven Abschnitt der zweiten Sensorstruktur 120 aufweisen.
-
Da die Verbindungsteile 113 und 123 der ersten und zweiten Sensorstruktur 110 bzw. 120 zwischen den äußeren Kopplungsteilen 111 und 121 und den zentralen Kopplungsteilen 112 und 122 verbunden sein können, welche dazwischen eine abgestufte Differenz aufweisen, kann die Verbindungsfläche zwischen den Verbindungsteilen 113 und 123 mit einer Neigung ausgebildet sein.
-
Daher kann der Dickenunterschied zwischen den äußeren Kopplungsteilen 111 und 121 und dem zentralen Kopplungsteil 112 und 122 der ersten und zweiten Sensorstruktur 110 bzw. 120 derart ausgebildet sein, so dass der Mess-Film 130 anfänglich als Folge davon deformiert wird, wenn der Mess-Film 130 zwischen der ersten und zweiten Sensorstruktur 110 und 120 zusammengedrückt wird.
-
Wie in 5 dargestellt ist, wenn die erste und zweite Sensorstruktur 110 und 120 miteinander gekoppelt sind, kann der Mess-Film 130 deformiert sein, so dass ein zentraler Abschnitt davon sich in einer Richtung erstreckt, wenn der Mess-Film 130 zwischen den äußeren Kopplungsteilen 111 und 121 und den zentralen Kopplungsteilen 112 und 122 der ersten und zweiten Sensorstruktur 110 und 120 komprimiert wird. Wenn daher der Mess-Film 130 zwischen der ersten und zweiten Sensorstruktur 110 und 120 angeordnet und zusammengedrückt wird, kann der Mess-Film 130 deformiert werden, um eine konvexe Struktur an dem zentralen Abschnitt davon aufzuweisen. Der Kraft-Drehmoment-Sensor 100 kann durch Verbinden der Sensorstruktur 110 und 120 fertiggestellt werden, während der Mess-Film 130 anfänglich deformiert ist.
-
In einigen beispielhaften Ausführungsformen der vorliegenden Erfindung können die erste und zweite Sensorstruktur 110 und 120 aus Edelstahl oder Titan mit Hilfe von damit verbundener elektrischer Entladungs-Bearbeitung (EDM = Electrical Discharge Machining) hergestellt werden. Weiterhin kann eine Mehrzahl von Kopplungsöffnungen 114 und 124 jeweils in den äußeren Kopplungsteilen 111 und 121 und den zentralen Kopplungsteilen 112 und 122 der ersten und zweiten Sensorstruktur 110 und 120 gebildet werden. Nach Zusammenbau des Kraft-Drehmoment-Sensors 100 zu einem einzelnen integrierten Teil kann der Kraft-Drehmoment-Sensor 100 mit einem entfernt liegenden Mechanismus und einem Arm eines Roboter mit Hilfe von Bolzen durch die Kopplungsöffnungen 114 und 124 gekoppelt werden.
-
Die äußeren Kopplungsteile 111 und 121 und die zentralen Kopplungsteile 112 und 122 können jeweils mit dem Roboterarm und dem entfernt liegenden Mechanismus (Werkzeug) durch Bolzen durch die Kopplungslöcher 114 und 124 gekoppelt werden, oder die äußeren Kopplungsteile 111 und 121 und die zentralen Kopplungsteile 112 und 122 können mit dem entfernt liegenden Mechanismus und dem Roboterarm jeweils mittels Bolzen durch die Kopplungslöcher 114 und 124 gekoppelt werden.
-
Wie in 3 dargestellt ist, kann eine Mehrzahl von Dehnungsmesseinrichtungen 132 auf dem Mess-Film 130 in unterschiedlichen axialen Richtungen angeordnet sein, das heißt in multi-axialen Richtungen. Die Dehnungsmesseinrichtungen 132 können auf einem flexiblen und ebenen Film angeordnet werden, welcher beispielsweise aus Polyamid hergestellt ist.
-
Der Mess-Film 130 kann Vorsprünge 131 aufweisen, welche in die Kopplungsöffnungen 114 und 124 der äußeren Kopplungsteile 111 und 121 und der zentralen Kopplungsteile 112 und 122 der ersten und zweiten Sensorstruktur 110 und 120 eingefügt sind. Wenn der Mess-Film 130 anfänglich hergestellt wird, können die in die Kopplungsöffnungen 114 und 124 der äußeren Kopplungsteile 111 und 121 eingefügten Vorsprünge 131 von den Höhen der in die Kopplungsöffnungen 114 und 124 der zentralen Kopplungsteil 112 und 122 eingefügten Vorsprünge verschieden sein. Der Unterschied in der Höhe der Vorsprünge 131 kann der gleiche sein wie der abgestufte Unterschied zwischen den äußeren Kopplungsteilen 111 und 121 und den zentralen Kopplungsteilen 112 und 122 der Sensorstrukturen 110 und 120.
-
In 1 bis 5 können die an dem zentralen Abschnitt des Mess-Films 130 angeordneten Vorsprünge 131 in die zentralen Kopplungsteile 112 und 122 der Sensorstrukturen 110 und 120 eingefügt werden, wobei die an dem äußeren Abschnitt des Mess-Films 130 angeordneten Vorsprünge 131 in die äußeren Kopplungsteile 111 und 121 der Sensorstrukturen 110 und 120 eingefügt werden können. Wenn daher der Kraft-Drehmoment-Sensor 110 in einem Zustand hergestellt wird, wo der Mess-Film 130 zwischen den Sensorstrukturen 110 und 120 angeordnet ist, ist der Mess-Film 130 anfänglich durch den abgestuften Unterschied zwischen den äußeren Kopplungsteilen 111 und 121 und den zentralen Kopplungsteilen 112 und 122 deformiert (die anfängliche Deformation wird von dem Zustand in 4 bis zu dem Zustand in 5 eingeleitet).
-
In dem Kraft-Drehmoment-Sensor 100 kann eine beabsichtigte anfängliche Deformation in dem flexiblen Mess-Film 130 mit der Dehnungsmesseinrichtung 132 in verschiedenen Achsrichtungen auftreten, wenn der Film zwischen den Sensorstrukturen 110 und 120 angeordnet ist. Der Kraft-Drehmoment-Sensor 100, welcher den dazwischen angeordneten anfänglich deformierten Mess-Film 130 aufweist, kann auf diese Weise hergestellt werden. Die erste Sensorstruktur 110 und die zweite Sensorstruktur 120, zwischen denen der Mess-Film 130 angeordnet ist, können miteinander durch Schmelzverbinden oder Schweißen verbunden werden.
-
Da der Kraft-Drehmoment-Sensor 100 durch beabsichtigtes Einleiten einer anfänglichen Deformation eines Mess-Filmes hergestellt wird, kann der Kraft-Drehmoment-Sensor 100 sowohl Druck- als auch Kompressions-Deformationen entsprechend der Elastizitäts-Änderung einer Sensorstruktur messen. Ebenso können multi-axiale (zum Beispiel dreiachsige) Kräfte und multi-axiale (zum Beispiel dreiachsige) Drehmomente gemessen werden, welche zwischen dem äußeren Kopplungsteil und dem zentralen Kopplungsteil erzeugt werden, und zwar mit einem Umwandlungssignal-Bearbeitungsverfahren unter Verwendung von Widerstandsänderungen einer Mehrzahl von Dehnungsmesseinrichtungen, welche auf einem Mess-Film angeordnet sind.
-
Entsprechend einem Kraft-Drehmoment-Sensor nach der Art einer Dehnungsmesseinrichtung gemäß der oben erläuterten Ausführungsform der vorliegenden Erfindung kann, da ein Mess-Film anfänglich zwischen zwei Sensorstrukturen deformiert ist, ein Mess-Film und ein Kopplungsteil, welche separat bereitgestellt sind, um Kompression und Druck zu messen, zusammen vereint werden, wodurch sowohl Messungen von Druck als auch Kompression ermöglicht werden.
-
Daher können mit einer einfachen Anordnung, welche einen einzelnen Mess-Film verwendet, eine multi-axiale Kraft und Drehmoment gemessen werden, wobei Herstellungskosten im Vergleich zu einem herkömmlichen Sensor eingespart werden können. Außerdem können Schwierigkeiten bei der Befestigung einer Messeinrichtung und beim Sensieren von Defekten und Fehlern, welche beim Befestigen der Messeinrichtung erzeugt werden, durch Verwendung der oben beschriebenen beispielhaften Ausführungsform der vorliegenden Erfindung überwunden werden.
-
Die Erfindung wurde detailliert mit Bezug auf beispielhafte Ausführungsformen davon erläutert. Jedoch wird der Fachmann bevorzugen, dass Änderungen an diesen Ausführungsformen vorgenommen werden können, ohne die Prinzipien und den Grundgedanken der Idee sowie den Umfang, welche in den beigefügten Ansprüchen definiert sind, und ihre Äquivalente zu verlassen.