-
Gebiet der Erfindung
-
Die Erfindung bezieht sich auf ein Verfahren und eine Vorrichtung zum Erkennen einer mechanischen Blockierung im Betrieb eines Elektromotors.
-
Hintergrund und Stand der Technik
-
Der Kraftstoffverbrauch eines Fahrzeugs kann gesenkt werden, indem die Erwärmung des Motors nach dem Start beschleunigt wird und/oder der Luftwiderstand des Fahrzeuges während der Fahrt verringert wird.
-
Zu diesem Zweck können Aktuatoren, beispielsweise ein bürstenloser Gleichstrom-(BLDC-) Motor mit einem mehrstufigen Stirnradgetriebe, eingesetzt werden, um Kühlerklappen eines Fahrzeugs je nach Bedarf zu verstellen. So werden beim Starten des Motors die Kühlerklappen geschlossen, um den Motor schneller zu erwärmen und während der Fahrt entsprechend geöffnet oder geschlossen werden, um beispielsweise den Luftwiderstand zu senken. Zudem kann dadurch die benötigte Kühlung des Motors gesteuert werden.
-
Ein Aktuator mit einem Elektromotor kann die Kühlerklappen in einem bestimmten Winkel verstellen. Falls der Aktuator den Befehl zur Schließung der Kühlerklappen ausführt, während die Kühlerklappen mechanisch blockiert sind, können sich die Kühlerklappen verbiegen, das Getriebe kann sich aufspannen und der Rotor des Elektromotors kann blockieren. Wenn die mechanische Blockierung nicht rechtzeitig erkannt und der Aktuator weiter angetrieben wird, steigt die vom Aktuator erzeugte Kraft an und es kann zu einer Beschädigung der Kühlerklappen kommen.
-
Außerdem können das Verbiegen der Kühlerklappen und das Spannen des Getriebes zu einem Zurückschnappen des Rotors des Elektromotors führen. Üblicherweise wird die Anzahl der Kommutierungen gezählt, um die Position des Aktuators zu bestimmen. Beim Zurückschnappen des Rotors gehen Kommutierungen verloren, sodass eine genaue Positionsbestimmung des Aktuators alleine durch Zählen nicht mehr möglich ist. Zur Positionsbestimmung wäre ein Positionssensor nötig, der das System verteuern würde.
-
Bei herkömmlichen Verfahren zur Erkennung von mechanischer Blockierung wird beispielsweise ein Grenzwert für eine elektrische Stromstärke bestimmt, die dem Elektromotor des Aktuators zugeführt wird. Diese elektrische Stromstärke wird auch der Einfachheit halber als „Motorstrom“ bezeichnet. Unter der Annahme, dass das vom Elektromotor erzeugte Drehmoment und der Motorstrom direkt proportional zueinander sind, wird einem maximalen Drehmoment ein maximaler Motorstrom zugeordnet.
-
Wenn die Kühlerklappen, oder allgemein ein durch den Aktuator zu verstellende Vorrichtung, z.B. ein Stellglied, mechanisch blockiert sind, steigt das vom Aktuator aufzubringende Drehmoment über ein vordefiniertes Nennmoment hinaus an. Dementsprechend übersteigt auch der Motorstrom einen vordefinierten Motorstrom-Grenzwert. Die mechanische Blockierung kann also erkannt werden, wenn der gemessene Motorstrom oberhalb des Motorstrom-Grenzwertes liegt.
-
Aufgrund von Fluktuationen von Kenngrößen des Elektromotors sowie der Temperatur während des Betriebs ist es allerdings schwierig, einen allgemein gültigen Stromgrenzwert festzulegen. Daher kann ein Ausgleichswert definiert und zu dem Motorstrom-Grenzwert addiert, beziehungsweise subtrahiert werden, um zu verhindern, dass eine mechanische Blockierung fälschlicherweise erkannt wird. Der Ausgleichswert sollte in Echtzeit berechnet und/oder angepasst werden. Dadurch wird das Motorstrom-Grenzwertverfahren verlangsamt.
-
Vor diesem Hintergrund besteht eine Aufgabe der Erfindung darin, ein Verfahren bereitzustellen, mit dem eine mechanische Blockierung eines Elektromotors schnell und effektiv, d.h. mit geringer Wahrscheinlichkeit für eine fehlerhafte Erkennung, erkannt werden kann. Die mechanische Blockierung sollte möglichst ohne Sensoren erkannt werden, um Herstellungskosten zu reduzieren.
-
Abriss der Erfindung
-
Es wird ein Verfahren zum Erkennen einer mechanischen Blockierung im Betrieb eines Elektromotors gemäß Anspruch 1 vorgeschlagen. Gemäß dem Verfahren wird eine dem Elektromotor zugeführte elektrische Stromstärke (d.h. der Motorstrom) erfasst und eine Drehzahl des Elektromotors ermittelt. Die erfasste elektrische Stromstärke sowie die ermittelte Drehzahl werden zu einer Kenngröße verknüpft. Die mechanische Blockierung wird erkannt, falls die Kenngröße außerhalb eines Sollbereichs liegt.
-
Der Elektromotor eignet sich, eine bewegliche Vorrichtung, wie z.B. Kühlerklappen eines Fahrzeugmotors, zu verstellen. Insbesondere kann der Elektromotor einen Teil eines Aktuators zum Verstellen der Vorrichtung bilden. Der Elektromotor umfasst in der Regel einen Stator und einen Rotor, die koaxial zueinander angeordnet sind. Der Rotor rotiert relativ zu dem statisch gelagerten Stator. Im Folgenden wird die Drehzahl des Rotors der Einfachheit halber als die Drehzahl des Elektromotors (oder einfach „die Drehzahl“) bezeichnet.
-
Ferner wird dem Elektromotor ein konstanter oder zeitlich variabler Motorstrom zugeführt, der als elektrische Stromstärke quantifiziert wird. Der Einfachheit halber werden die Begriffe Stromstärke und Motorstrom stellvertretend für die elektrische Stromstärke verwendet.
-
Die Drehzahl des Elektromotors kann um eine oder mehrere Größenordnungen höher sein als die Drehzahl der zu verstellenden Vorrichtung. Hierzu kann ein Getriebe, z.B. ein Stirnradgetriebe, zwischen dem Elektromotor und der Vorrichtung geschaltet sein, um die Drehzahl des Elektromotors herunterzusetzen. Ferner kann das Drehmoment des Elektromotors um den gleichen oder einen ähnlichen Faktor übersetzt werden.
-
Eine mechanische Blockierung wird angenommen, wenn die zu verstellende Vorrichtung, oder aber auch der Elektromotor, die verstellende Bewegung nicht oder nicht planmäßig ausführen kann. Eine derartige Blockierung kann beispielsweise durch Verschleiß, Vereisung, Fremdkörper in beweglichen Teilen der Vorrichtung oder des Elektromotors, eine Verformung und/oder eine Fehlfunktion hervorgerufen werden.
-
Die Drehzahl und die Stromstärke können mathematisch zu der Kenngröße verknüpft werden. Mit anderen Worten, die Kenngröße wird als eine mathematische Funktion abhängig von der Drehzahl und der Stromstärke bestimmt. Beispielsweise wird die Drehzahl durch die Stromstärke dividiert oder umgekehrt. Insbesondere können die Divisionsoperationen durch Schiebeoperationen und Multiplikationen ersetzt werden, die schneller als entsprechende Divisionsoperationen ausgeführt werden können. Alternativ oder zusätzlich wird ein jeweiliger Kehrwert gebildet, um die Rechenoperationen zu beschleunigen. Der Quotient (oder dessen Kehrwert) kann mit weiteren Faktoren multipliziert oder addiert werden, wie später ausführlicher beschrieben wird. In einer alternativen Ausführung wird statt der Drehzahl die gegenelektromotorische Kraft (BEMF) gemessen oder anderweitig ermittelt und in vergleichbarer Weise wie die Drehzahl zur Ermittlung der Kenngröße verwendet.
-
Der Sollbereich umfasst mindestens einen Grenzwert. Falls die Kenngröße diesen Grenzwert, je nach Definition der Kenngröße, unterschreitet oder überschreitet, wird eine mechanische Blockierung erkannt.
-
Zusätzlich oder alternativ können die Drehzahl und die Stromstärke logisch zu einer anderen oder einer weiteren Kenngröße verknüpft sein. Die Drehzahl und die Stromstärke können demnach über eine UND-Verknüpfung oder über eine ODER-Verknüpfung miteinander verknüpft sein. Beispielsweise kann die Kenngröße angeben, ob erste Anforderungen an die Drehzahl UND, oder ODER, zweite Anforderungen an die Stromstärke erfüllt sind. Demnach umfasst der Sollbereich die ersten und die zweiten Anforderungen.
-
Es ist ferner denkbar, eine mathematische und eine logische Verknüpfung des Motorstroms und der Drehzahl gleichzeitig zu verwenden. In diesem Fall können zwei oder mehr Unterkenngrößen aus unterschiedlichen Verknüpfungen des Motorstroms und der Drehzahl miteinander gebildet werden. Die Unterkenngrößen können über eine mathematische Operation, z.B. eine Multiplikation, oder eine logische Operation, z.B. eine UND-Verknüpfung, gebildet sein. Ferner können die Unterkenngrößen zunächst einzeln mit dem jeweiligen Sollbereich verglichen werden. Die Unterkenngrößen können miteinander zu der Kenngröße verknüpft werden. Die Kenngröße kann mit einem Gesamtsollbereich verglichen werden.
-
Das Erfassen der Stromstärke sowie das Ermitteln der Drehzahl können periodisch in einem wiederkehrenden Zyklus erfolgen. In einem Ausführungsbeispiel wird eine Anzahl von aufeinander folgenden Fällen registriert, in welchen die Kenngröße außerhalb des Sollbereichs liegt. Der Elektromotor wird gestoppt, wenn die Anzahl einen voreingestellten Anzahl-Grenzwert überschreitet. In einem alternativen Ausführungsbeispiel wird der Elektromotor gestoppt, sobald bei der Kenngröße eine einzige Überschreitung des Sollbereichs auftritt. Dadurch wird eine mechanische Blockierung beispielsweise sehr schnell erkannt.
-
Mithilfe des vorgeschlagenen Verfahrens kann eine mechanische Blockierung schnell und effektiv erkannt werden. Dadurch können Schrittverlusten und möglichen Beschädigungen des Elektromotors und/oder der zu verstellenden Vorrichtung vorgebeugt werden.
-
In manchen Ausführungsformen wird ferner eine Zeitdauer zwischen zwei aufeinander folgenden Kommutierungen des Elektromotors erfasst, wobei die Drehzahl proportional zum Kehrwert der Zeitdauer ist. Alternativ kann beispielsweise auch ein einfacher DC-Motor genutzt werden und die Drehzahl mittels eines Sensor oder eines anderen Verfahrens bestimmt werden. Beispielsweise kann die Drehzahl auch ohne zusätzliche Sensoren, über die aufgrund der Drehbewegung des Rotormagneten in den Motorphasen induzierte Spannung, der gegenelektromotorischen Kraft, bestimmt werden.
-
Der Elektromotor kann mehrere Phasen umfassen, die, je nach Drehzahl und/oder Drehgeschwindigkeit des Elektromotors, phasenverschoben kommutiert werden. Die Phase des Elektromotors bezieht sich auf einen elektrischen Anschluss, der mit einer oder mehreren Statorspulen einer Statorwicklung gekoppelt ist, und über die die Statorspulen bestromt werden können. Der Begriff Kommutierungen bezieht sich auf einen Vorgang, bei dem der Motorstrom von einer Phase zu einer nächsten Phase des Elektromotors übergeht oder die Polarität des durch eine Phasenwicklung fließenden elektrischen Stroms geändert wird. Beispielsweise kann der Elektromotor eine, zwei oder drei Phasen umfassen. Insbesondere kann der Elektromotor ein dreiphasiger bürstenloser Gleichstrommotor sein. Dabei können die drei Phasen entweder in einer Deltakonfiguration oder in einer Sternkonfiguration miteinander verschaltet sein. Die Bestromung der Phasen kann dann beispielweise durch Schalten von Brückenschaltern einer Brückenschaltung, insbesondere einer H6-Brücke, gesteuert werden. Die Erfindung kann aber auch bei anderen Elektromotoren, beispielsweise bei einem ein- oder zweiphasigen Schrittmotor mit uni- oder bipolarer Bestromung der Phasenwicklungen, verwendet werden. Zur Steuerung der Kommutierung eines zweiphasigen, bipolaren Schrittmotors können beispielsweise zwei H-Brücken mit jeweils vier Halbleiterschaltern verwendet werden.
-
Eine direkte Bestimmung der Drehzahl, z.B. mithilfe von Sensoren, kann kosten- und/oder herstellungstechnisch ungünstig sein. Beispielsweise werden zur direkten Bestimmung der Drehzahl zusätzliche elektronische Bauelemente benötigt, was die Herstellungskosten und den Herstellungsaufwand erhöht und zusätzlich Platz für diese Bauelemente erfordert.
-
Durch die Bestimmung der Zeitdauer kann die Verwendung von Sensoren vermieden werden. Anstatt die Drehzahl direkt zu messen, kann die Zeitdauer zwischen zwei Kommutierungen des Motors erfasst werden, woraus die Drehzahl errechnet werden kann. Die oben genannte Zeitdauer zwischen zwei aufeinander folgenden Kommutierungen kann beispielsweise an einer Stromversorgung für den Elektromotor oder an einer Stromzuführung zu dem Elektromotor gemessen werden.
-
Insbesondere kann die Drehzahl n wie folgt bestimmt werden:
N
Pol ist die Anzahl der Kommutierungen für eine vollständige Umdrehung (360°-Drehung) des Rotors. Δt ist die Zeitdauer zwischen zwei Kommutierungen. Wenn zum Beispiel der Elektromotor ein dreiphasiger Gleichstrommotor mit drei Polpaaren am Rotor (d.h. drei Statorspulen und drei Rotormagnete) ist, gilt für die Kommutierungszahl N
Pol = 18.
-
In manchen Ausführungsformen wird eine Nulldurchgangszeit zwischen zwei aufeinander folgenden Nulldurgängen der elektrischen Stromstärke durch eine Phase des Elektromotors erfasst, wobei die Drehzahl proportional zum Kehrwert der Nulldurchgangszeit ist.
-
Die Nulldurchgangszeit kann der oben genannten Zeitdauer zwischen zwei aufeinander folgenden Kommutierungen gleichgesetzt werden. Der Motorstrom kann an der Stromversorgung oder an der Stromzuführung zu dem Elektromotor gemessen werden. Dabei kann der jeweilige Durchgang des Motorstroms durch ein von Benutzer definierbares Nullniveau detektiert werden und der zeitliche Abstand zwischen zwei aufeinander folgenden Nulldurchgängen bestimmt werden. Auf diese Weise kann die Drehzahl des Elektromotors bestimmt werden.
-
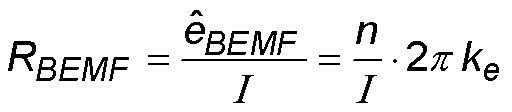
In manchen Ausführungsformen wird ein Ersatzwiderstand (RBEMF) bestimmt, der proportional zum Quotient der Drehzahl durch die elektrische Stromstärke ist. Der Ersatzwiderstand entspricht dann der Kenngröße.
-
Die Phasen des Elektromotors können, wie in
1 gezeigt, jeweils durch einen Widerstand 11, eine Induktivität 12 und eine Spannungsquelle 13, die in Serie geschaltet sind, modelliert werden. Eine Spannung, die an der Spannungsquelle 13 anliegt, entspricht der back electromotive force (Back-EMF oder BEMF)-Spannung e
BEMF, die sich auf die durch die Drehung des Rotors induzierte Spannung in der Statorspule bezieht. Die BEMF-Spannung e
BEMF wird wie folgt bestimmt:
wobei Φ der Fluss durch eine Wicklung der Statorspule und N
W die Anzahl der Windungen der Statorspule ist.
-
Für die Spannungsamplitude ê
BEMF der BEMF-Spannung gilt:
wobei l die mittlere Spulenlänge der Statorspulen, ω die Winkelgeschwindigkeit des Rotors, B
m die maximale magnetische Flussdichte in den Wicklungen der Statorspulen und r der Radius des Motors ist. Die Parameter 2, N
W, l, r und B
m können durch die so genannte BEMF-Konstante k
e = 2 N
W l r B
m zusammengefasst werden, und man erhält:
-
Die Drehzahl n kann, wie oben erläutert, aus der Zeitdauer zwischen zwei Kommutierungen oder aus der Nulldurchgangszeit bestimmt werden.
-
Der Ersatzwiderstand R
BEMF entspricht dem Quotient der so bestimmten BEMF-Spannung ê
BEMF durch die Stromstärke I:
-
Der Ersatzwiderstand RBEMF ist also proportional zu dem Quotient der Drehzahl n durch die Stromstärke I. Liegt der Ersatzwiderstand RBEMF außerhalb eines vordefinierbaren Sollbereichs, wird eine mechanische Blockierung erkannt. Beispielsweise umfasst der Sollbereich alle Werte oberhalb eines Grenzwertes, sodass eine mechanische Blockierung dann erkannt wird, wenn der Ersatzwiderstand den Grenzwert unterschreitet.
-
In manchen Ausführungsformen wird ein Ersatzleitwert (GBEMF) proportional zum Quotient der elektrischen Stromstärke durch die Drehzahl bestimmt, wobei der Ersatzleitwert der Kenngröße entspricht.
-
Wie oben erläutert, gilt n ∝ Δt
-1 sowie R
BEMF
Folglich gilt
-
Multiplikationsoperationen erfordern weniger Rechenzeit und Rechenleistung als Divisionsoperationen. Daher kann das Verfahren weiter beschleunigt werden, indem anstatt des Ersatzwiderstands RBEMF dessen Kehrwert, der Ersatzleitwert GBEMF, bestimmt wird. Für den Sollbereich wird entsprechend ein Kehrwert gebildet.
-
In manchen Ausführungsformen wird eine zeitliche Ableitung des Ersatzwiderstands aus dem Quotient der Drehzahl durch die elektrische Stromstärke bestimmt. Zusätzlich oder alternativ wird eine zeitliche Ableitung des Ersatzleitwerts aus dem Quotient der elektrischen Stromstärke durch die Drehzahl bestimmt. Die jeweilige zeitliche Ableitung oder beide zeitliche Ableitungen entsprechen der Kenngröße.
-
Nicht nur der zeitliche Verlauf des Ersatzwiderstands oder des Ersatzleitwerts, sondern auch ihre jeweilige zeitliche Ableitung kann Auskunft darüber geben, ob eine mechanische Blockierung vorliegt oder nicht. Insbesondere kann die jeweilige zeitliche Ableitung zusätzlich zur Ermittlung der absoluten Werte für den Ersatzwiderstand oder den Ersatzleitwert bestimmt werden, um eine Fehlerquote des Verfahrens, d.h. dass fälschlicherweise eine mechanische Blockierung erkannt wird, zu minimieren.
-
In manchen Ausführungsformen wird die Kenngröße mit einem Ausgleichswert zur Kompensierung von temperaturabhängigen, zeitabhängigen und/oder betriebszustandsabhängigen Schwankungen eines Wirkungsgrades des Elektromotors multipliziert oder addiert. Es kann beispielsweise vorgesehen sein, dass mehrere Ausgleichswerte in einer Tabelle abgelegt werden. Idealerweise sind die einzelnen Werte der Tabelle einem Temperaturbereich zugeordnet und werden in Echtzeit aus der Tabelle ausgelesen um den Grenzwert anzupassen.
-
Der Wirkungsgrad η des Elektromotors gibt an, wie effektiv das vom Elektromotor erzeugte Drehmoment M
i auf einen Abtrieb, z.B. die zu verstellende Vorrichtung, übertragen wird. Beispielsweise wird ein Abtriebsmoment Mout bestimmt durch:
wobei i das Getriebeübersetzungsverhältnis angibt. Beispielsweise liegt i zwischen 10
2 und 10
4. Da der Wirkungsgrad eines Getriebes keine konstante Größe ist, sondern neben konstruktiven Parametern auch von der Winkelgeschwindigkeit, dem Lastmoment, den Schmierverhältnissen und der Temperatur abhängig ist, wird der Ausgleichswert je nach verwendeter Formel zu dem Ersatzwiderstand oder Ersatzleitwert addiert oder multipliziert.
-
In manchen Ausführungsformen erzeugt der Elektromotor im Betrieb ein Rohdrehmoment. Ein Getriebe übersetzt das Rohdrehmoment ins Langsame in einem Untersetzungsverhältnis von zum Beispiel 1:10 bis 1:10000 (entspricht einem Übersetzungsverhältnis von 10:1 bis 10000:1) in ein Nenndrehmoment. Der Sollbereich für die Kenngröße entspricht einem Anstieg des Nenndrehmoments um zum Beispiel bis zu 0,5 Nm, insbesondere bis zu 0,2 Nm oder bis zu 0,1 Nm.
-
Beispielsweise arbeitet der Elektromotor in einem Drehzahlbereich von 100 bis 10000 Umdrehungen pro Minute und in einem Rohdrehmomentbereich von 10-4 bis 10-2 Nm. Ein Getriebe, das das Rohdrehmoment und die Drehzahl des Elektromotors in das Nenndrehmoment und die Drehzahl der zu verstellenden Vorrichtung übersetzt bzw. untersetzt, arbeitet üblicherweise bei einem Wirkungsgrad von 0,2 bis 0,9.
-
In manchen Ausführungsformen weist der Elektromotor im Betrieb mindestens eine der folgenden Eigenschaften auf: eine Drehmomentkonstante von 1 - 100 mNm/A, eine BEMF-Konstante von 1 - 200 mVs/rad, ein Nenndrehmoment von 0.1 - 50 Nm und eine Drehzahl von 50 - 50000 min-1.
-
Es sei angemerkt, dass die genannten Werte lediglich Referenzwerte wiedergeben, und keine Einschränkung darstellen.
-
In manchen Ausführungsformen werden die elektrische Stromstärke und die Drehzahl über eine UND-Verknüpfung miteinander verknüpft. Die mechanische Blockierung wird erkannt, falls die Stromstärke außerhalb eines Stromstärkesollbereichs und die Drehzahl außerhalb eines Drehzahlsollbereichs liegen. Dabei kann der Drehzahlsollbereich einen Abfall der Drehzahl um zum Beispiel bis zu 30%, insbesondere bis zu 20% oder bis zu 10%, umfassen. Zusätzlich oder alternativ kann der Stromstärkesollbereich einen Anstieg der elektrischen Stromstärke um bis zu 500 mA, insbesondere bis zu 300 mA oder bis zu 200 mA, umfassen.
-
Gemäß einem weiteren Aspekt der Erfindung wird eine Vorrichtung zum Erkennen einer mechanischen Blockierung im Betrieb eines Elektromotors vorgeschlagen. Die Vorrichtung umfasst eine Stromstärkeerfassungseinheit zum Erfassen einer dem Elektromotor zugeführten elektrischen Stromstärke, eine Drehzahlermittlungseinheit zum Ermitteln einer Drehzahl des Elektromotors, eine Recheneinheit zum Verknüpfen der elektrischen Stromstärke und der Drehzahl zu einer Kenngröße, und eine Vergleichseinheit zum Vergleichen der Kenngröße mit einem oder mehreren Grenzwerten eines Sollbereichs. Die Vorrichtung erkennt die mechanische Blockierung, falls die Kenngröße außerhalb des Sollbereichs liegt.
-
Die vorgeschlagene Vorrichtung ist geeignet, das Verfahren gemäß Anspruch 1 oder dessen Ausführungsform auszuführen. Die vorgeschlagene Vorrichtung umfasst die strukturellen Merkmale, die zum Ausführen des vorgeschlagenen Verfahrens erforderlich sind.
-
Ferner kann die Vorrichtung zum Beispiel einen 32-Bit ARM Cortex M3 Prozessor mit RISC-Architektur und/oder einen ähnlichen Prozessor umfassen. Unabhängig vom Prozessortyp, ist es vorteilhaft, wenn der Prozessor geeignet ist, die Verknüpfung der Drehzahl und der Stromstärke vorzunehmen und die Kenngröße mit dem jeweiligen Sollwert zu vergleichen. Ferner kann sich der Prozessor eignen, den Elektromotor zu stoppen, falls eine mechanische Blockierung festgestellt wird. Dabei kann die Kommutierung des Motorstroms gestoppt und/oder der Elektromotor abgebremst werden. Beispielsweise kann ein 32-Bit Prozessor, beziehungsweise Controller, des oben genannten Typs eine entsprechende Regelung umsetzen.
-
Ein derartiger Controller weist neben einer hohen Rechenleistung auch eine hohe Integrationsdichte von Peripherieeinheiten auf, die speziell für die Ansteuerung von BLDC- und Schrittmotoren geeignet sind. Ein weiterer Vorteil des Controllers liegt darin, dass dieser integrierte Motortreiber besitzt, die direkt an die 12-V-Batteriespannung angeschlossen werden können. Dadurch ist es möglich, BLDC-Motoren ohne zusätzliche Beschaltungsmaßnahmen mit einer 12-V-Spannung anzusteuern.
-
Mithilfe des vorgeschlagenen Verfahrens sowie der vorgeschlagenen Vorrichtung kann eine mechanische Blockierung schnell und zuverlässig erkannt werden. Dadurch können Beschädigungen des Elektromotors oder der durch den Elektromotor zu verstellenden Vorrichtung vorgebeugt werden.
-
Figurenliste
-
Die Erfindung ist im Folgenden anhand von Beispielen mit Bezug auf die Zeichnungen näher erläutert.
- 1 zeigt eine schematische Darstellung eines Modells für einen Ersatzwiderstand;
- 2 zeigt eine schematische Querschnittsansicht eines bürstenlosen Gleichstrom-(BLDC-) Elektromotors;
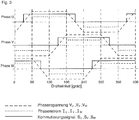
- 3 zeigt ein schematisches Diagramm von Phasenspannungen, die an den Phasen des Elektromotors von 2 anliegen;
- 4 zeigt einen zeitlichen Verlauf des Drehmoments eines Elektromotors beim Vorliegen einer mechanischen Blockierung;
- 5 zeigt einen zeitlichen Verlauf einer zu einer Phase eines Elektromotors zugeführten Stromstärke bei Vorliegen einer mechanischen Blockierung;
- 6 zeigt einen zeitlichen Verlauf der Nulldurchgangszeit eines Elektromotors beim Vorliegen einer mechanischen Blockierung;
- 7 zeigt eine schematische Darstellung einer Steuereinheit;
- 8 zeigt einen zeitlichen Verlauf des Tastverhältnisses eines Elektromotors beim Vorliegen einer mechanischen Blockierung;
- 9 zeigt ein Ablaufdiagramm eines Beispiels eines Erkennungsverfahrens einer mechanischen Blockierung;
- 10 zeigt ein Ablaufdiagramm einer Abwandlung des Beispiels von 9;
- 11 zeigt ein Ablaufdiagramm eines weiteren Beispiels eines Erkennungsverfahrens einer mechanischen Blockierung;
- 12 zeigt ein Ablaufdiagramm eines weiteren Beispiels eines Erkennungsverfahrens einer mechanischen Blockierung; und
- 13 zeigt eine schematische Darstellung eines Beispiels einer Steuereinheit zum Steuern eines Elektromotors.
-
Beschreibung der Beispiele
-
Im Folgenden wird ein bürstenloser Gleichstrom (BLDC) Elektromotor betrachtet. 2 zeigt beispielhaft einen schematischen Querschnitt eines derartigen BLDC-Motors 20. Der BLDC-Motor 20 umfasst einen Rotor 21 und einen Stator 22, die koaxial zu einer Drehachse R des BLDC-Motors 20 angeordnet sind. Der Rotor 21 umfasst einen ringförmigen Permanentmagneten 23 mit zwei Polen, die zusammen ein Polenpaar bilden. Der Stator 22 umfasst drei Zähne 24 - 26, um die jeweils eine Statorspule 27 - 29 gewickelt ist. Die Statorspulen 27 - 29 stellen jeweils eine Phase dar, die mit den Buchstaben U, V, W gekennzeichnet sind.
-
Die Phasen U, V, W werden phasenweise verschoben bestromt, wobei die zugeführte elektrische Stromstärke als der jeweilige Motorstrom bezeichnet wird. Bei Bestromung erzeugt die jeweilige Statorspule 27 - 29 ein Magnetfeld. Der Magnet 23 des Rotors 21 folgt den Feldlinien der Magnetfelder der Statorspulen 27 - 29. Infolgedessen rotiert der Rotor 21 relativ zu dem Stator 22, der fest steht. Der Motor 20 ist über ein Getriebe (nicht gezeigt) mit einer schwenkbaren Kühlerklappe (nicht gezeigt) gekoppelt. Um die Kühlerklappe in verschiedenen Winkeln zu verfahren, wird die Anzahl der Kommutierungsschritte gezählt.
-
Während des Betriebs des Elektromotors wird der Motorstrom gemessen. Motorstrom, der zwischen Erkennen der mechanischen Blockierung und Stoppen des Elektromotors fließt, ist ein Maß für einen Drehmomentüberschuss des Motors 20, der zu Beschädigungen des Motors 20, des Getriebes und/oder der Kühlerklappe führen kann.
-
Schrittverluste entstehen auch durch das Zurückschnappen des Getriebes. Das Zurückschnappen tritt auf, wenn der Motor 20 den Endanschlag erreicht und weiter kommutiert wird. Dabei kann sich der Endanschlag durch die Kraft, die durch den Motor 20 ausgeübt wird, verbiegen. Wenn die mechanische Blockierung erkannt wird, wird ein Kommutierungswechsel unterbunden und der Strom durch die zuletzt aktiven Phasen wird auf den Haltestrom abgesenkt.
-
Durch das Absinken des Motorstroms kann eine Gegenkraft, die der verbogene Endanschlag auf den Motor ausübt, diejenige Kraft übersteigen, die durch den Motor 20 erzeugt wird. Dieser Kraftunterschied lässt den Rotor 21 zurückschnappen.
-
Ferner kennzeichnend für die Schnelligkeit eines Erkennungsverfahrens einer mechanischen Blockierung ist eine so genannte Abschaltzeit, d.h. eine Zeitdauer zwischen dem ersten Kontakt mit dem harten Endanschlag und dem Stoppen der Kommutierung durch die Software. Je geringer die Abschaltzeit, desto geringer fallen der Drehmomentüberschuss und ein möglicher Schrittverlust aus.
-
3 zeigt ein schematisches Diagramm von Phasenspannungen, die an den Phasen U, V, W des BLDC-Motors 20 anliegen. Der Nulldurchgang tritt genau zwischen zwei aufeinander folgenden Kommutierungen auf, die in 3 durch senkrechte gestrichelte Linien dargestellt sind. Die Nulldurchgangszeit bezieht sich auf die Zeitdauer von zwei aufeinander folgenden Nulldurchgängen des Motorstroms an einer Phase.
-
4 zeigt Messergebnisse des Drehmoments bei Vorliegen einer mechanischen Blockierung bei einem Nennmoment von 1,2 Nm und einer Drehzahl von 2499 min-1 als ein Beispiel. Beim Erreichen des Endanschlags stellt sich eine Blockierung ein, wobei nach einer Zeit von etwa 5,4 s das Drehmoment zu steigen beginnt. Innerhalb von ungefähr 200 ms nimmt das Drehmoment von 0,2 Nm bis 1,8 Nm zu. Somit zeigt die Zunahme des Drehmoments eine Steigung von 8 mNm/ms.
-
In dem gezeigten Beispiel wurde ein herkömmliches Drehzahlabfallverfahren verwendet, bei dem der Elektromotor gestoppt wird, wenn die Drehzahl unter einem voreingestellten Grenzwert fällt. Eine Abweichung des Drehmoments vom Nennmoment um +0,1 Nm wird als das Abschaltmoment definiert. Mit der oben berechneten Steigung ergibt sich, dass das Abschaltmoment nach einer Zeit von 12,5 ms erreicht wird, wenn der Elektromotor blockiert ist. Diese Zeitspanne von 12,5 ms wird als die Sollabschaltzeit definiert.
-
5 zeigt ein Diagramm, das Messergebnisse der elektrischen Stromstärke bei Vorliegen einer mechanischen Blockierung für das hier betrachtete Beispiel zeigt. In Kombination mit der oben in Bezug auf 3 beschriebenen Messung des Drehmoments ergibt sich, dass die Stromstärke bei Vorliegen der mechanischen Blockierung ansteigt, bis die Blockierung erkannt wird. Beispielsweise kann der Anstieg circa 150 mA betragen.
-
Wie in 5 gezeigt, schwankt die gemessene Stromstärke, beispielsweise um etwa 100 mA. Dadurch wird eine präzise Messung des Stromanstiegs erschwert.
-
Bei Vorliegen einer mechanischen Blockierung sinkt die Drehzahl des Elektromotors. Wie oben beschrieben, ist die BEMF-Spannung proportional zur Drehzahl des Elektromotors. Daher kann die Blockierung auch anhand der gemessenen BEMF-Spannung erkannt werden. Die BEMF-Spannung kann an einer Phase nur dann gemessen werden, wenn diese nicht bestromt wird.
-
Aus den Messungen der BEMF-Spannung (nicht gezeigt) ergibt sich, dass die BEMF-Spannung in dem betrachteten Beispiel bei Normalbetrieb des Elektromotors bei 4,9 V liegt. Die BEMF-Spannung sinkt auf 3,7 V, wenn die mechanische Blockierung erkannt wird. Der Abfall der BEMF-Spannung beträgt also 1,2 V.
-
6 zeigt einen zeitlichen Verlauf der gemessenen Nulldurchgangszeit. Die Nulldurchgangszeit beträgt bei einem Normalbetrieb des Elektromotors in dem betrachteten Beispiel im Mittel ca. 1350 µs und steigt auf ca. 2400 µs an, bis die mechanische Blockierung erkannt wird. Somit steigt die Nulldurchgangszeit um ca. 80% bei Vorliegen einer Blockierung. Dieser deutliche Anstieg zeigt, dass die Nulldurchgangszeit ein geeigneter Indikator für eine mechanische Blockierung ist.
-
Innerhalb der Sollabschaltzeit von 12,5 ms steigt die Nulldurchgangszeit um 10 %. Da die Schwankungen der gemessenen Nulldurchgangszeit kleiner als 10 % sind, kann die Nulldurchgangszeit als Indikator für eine Blockiererkennung genutzt werden.
-
Das Tastverhältnis gibt an, in welchem Verhältnis eine Zeitdauer, innerhalb welcher eine Phase des Elektromotors bestromt wird, zu einer Gesamtzeitdauer steht. Insbesondere ist die Gesamtzeitdauer eine periodische und genormte Zeitdauer, während die bestromte Zeitdauer als eine Impulsdauer verstanden wird. Das Tastverhältnis variiert zwischen 0 %, wenn die Phase nicht bestromt wird, und 100 %, wenn die Phase dauerhaft bestromt wird.
-
Das Tastverhältnis wird durch eine Steuereinheit 60 geregelt, die in 7 schematisch gezeigt ist. Der Motorstrom 61 und die Drehzahl 62 des Elektromotors 20 werden erfasst und an Knotenpunkten 63, 64, die beispielsweise Subtrahierer sind, mit dem jeweiligen Sollwert 61', 62' verglichen. Ein Stromregler 65 und ein Drehzahlregler 66 empfangen den jeweiligen Vergleichswert 61", 62" und ermitteln ein erstes Tastverhältnis 67 bezüglich des Motorstroms und ein zweites Tastverhältnis 68 bezüglich der Drehzahl. Eine Logikeinheit 69 empfängt die ermittelten Tastverhältnisse 67, 68 und berechnet das Gesamttastverhältnis 70, mit dem der Elektromotor 20 betrieben wird.
-
Die Logikeinheit 69 sorgt dafür, dass der Elektromotor 20 im stationären Betrieb durch den Drehzahlregler 66 geregelt wird. Wenn die Last am Elektromotor erhöht wird, fällt die Drehzahl 62 ab. Um dem Drehzahlabfall entgegenzuwirken, erhöht der Drehzahlregler 66 das zweite Tastverhältnis 68. Infolgedessen steigt der Motorstrom 61 an, bis ein Maximalwert erreicht ist. Dann gibt der Stromregler 65 das erste Tastverhältnis 67 an und begrenzt das vom Drehzahlregler 68 vorgegebene zweite Tastverhältnis 68. Insgesamt sorgt die Logikeinheit 69 dafür, dass der Drehzahlregler 66 durch den Stromregler 65 begrenzt wird.
-
8 zeigt einen zeitlichen Verlauf des Gesamttastverhältnisses 70, das im Folgenden der Einfachheit halber als „Tastverhältnis“ bezeichnet wird. Die Abszisse gibt Messpunkte der periodisch ausgeführten Messung an. Die Ordinate gibt das Tastverhältnis 70 an.
-
Bis etwa zum 75. Messpunkt bleibt in dem betrachteten Beispiel das Tastverhältnis 70 nahezu konstant. Der Elektromotor 20 läuft im Normalbetrieb ohne Störung und das Tastverhältnis 70 liegt bei ca. 37 %. Dann wird der Elektromotor 20 blockiert, sodass die Drehzahl 62 sinkt. Als Reaktion darauf erhöht der Drehzahlregler 66 das Tastverhältnis 70 auf ca. 40 %. Aufgrund des erhöhten Tastverhältnisses 70 erreicht der Motorstrom 61 bei etwa dem 190. Messpunkt einen vordefinierten Motorstrom-Grenzwert. Daraufhin greift der Stromregler 65 ein und beschränkt das Tastverhältnis 70 auf einen vordefinierten Grenzwert, um den Motorstrom 61 zu begrenzen. Somit sinkt das Tastverhältnis 70, da die Drehzahl 62 aufgrund der Blockierung abfällt und der Motorstrom 61 nicht erhöht wird. Als Ergebnis sinkt das Tastverhältnis 70 unter 30 %, wie in 8 gezeigt ist.
-
Wird das Verhalten des Tastverhältnisses bis zur Erkennung der Blockierung betrachtet, so ändert es sich in dem betrachteten Beispiel von ca. 37 % zu Beginn der Messung (1. Messpunkt) bis zum Maximum von 40 % beim 190. Messpunkt. Diese Änderung erfolgt innerhalb von etwa 82 ms. Vom Maximum fällt das Tastverhältnis innerhalb von 33 mm auf ca. 28 % ab, bevor der Elektromotor 20 gestoppt wird. Bei einer mechanischen Blockierung bestimmt somit der Stromregler 65 das Gesamttastverhältnis 70.
-
Deshalb kann die Aktivität des Stromreglers 65 einen weiteren Indikator für eine Blockierung darstellen. Bei Vorliegen einer mechanischen Blockierung steigt der Motorstrom an, bis ein Grenzwert erreicht ist. Die Drehzahl 61 des Elektromotors 20 fällt ab und der Drehzahlregler 66 erhöht das Tastverhältnis 70. Infolgedessen steigt der Motorstrom über einen Grenzwert hinaus an, weshalb der Stromregler 65 aktiv wird, um das Tastverhältnis 70 zu begrenzen. Folglich kann eine Anzahl an Aufrufen des Stromreglers 65 in einer vorgegebenen Zeitspanne ein weiteres Kriterium für das Vorliegen einer Blockierung darstellen.
-
Zusammengefasst kann eine Blockierung erkannt werden, wenn die BEMF-Spannung unter einen Grenzwert sinkt und/oder wenn die Nulldurchgangszeit einen Grenzwert überschreitet. Ebenso kann eine Blockierung erkannt werden, wenn der Stromregler 65 innerhalb einer bestimmten Zeitspanne das vom Drehzahlregler 66 vorgegebene zweite Tastverhältnis 68 häufiger als vordefiniert begrenzt.
-
Basierend auf den Erkenntnissen sowie dem in 1 gezeigten Ersatzmodell der Motorphase kann ein Ersatzwiderstand modelliert werden, mit Hilfe dessen eine mechanische Blockierung schnell und effektiv erkannt werden kann.
-
Wie bereits oben gezeigt, lässt sich der Ersatzwiderstand R
BEMF berechnen aus:
-
Im stationären Betrieb ohne Blockierung ist der Widerstand RBEMF konstant. Tritt eine mechanische Blockierung auf, so steigt der Strom I an und die BEMF-Spannung êBEMF sinkt. Damit wird der Abfall des Ersatzwiderstands verstärkt. Der Ersatzwiderstand eignet sich als Indikator für eine Blockierung.
-
Im Folgenden werden verschiedene Lastfälle betrachtet: ohne Last, mit Last, mit Grenzlast, mit Überlast und Lastfälle, bei denen der Elektromotor gebremst werden muss. Die Überlast entspricht dem Blockierungsfall, weil zum Bewegen der Last ein höheres Drehmoment als das Nennmoment erzeugt werden muss. Bei diesen verschiedenen Lastfällen werden die BEMF-Spannung, die Nulldurchgangszeit, der Motorstrom und das Verhalten des Reglers betrachtet. Aus dem Vergleich der Lastfälle mit dem Überlastfall können die Parameter bei einer Blockierung ermittelt werden.
-
Es zeigt sich, dass der Ersatzwiderstand im stationären Betrieb des Elektromotors konstant ist. Auch der Ersatzwiderstand bleibt stets oberhalb eines Grenzwertes. Dieser Grenzwert lässt sich aus der Grenzbelastung bestimmen, denn bei einer Belastung mit Grenzlast erreicht der Motorstrom seinen maximalen Wert, während die Drehzahl vergleichsweise konstant bleibt.
-
Falls eine Überlast vorliegt, kommt es zu einem Abfall der Drehzahl, da der Motorstrom begrenzt wird und deshalb das erforderliche Drehmoment nicht aufgebracht werden kann. Damit sinken die BEMF-Spannung und somit auch der Ersatzwiderstand.
-
9 zeigt ein Ablaufdiagramm 900 eines Ausführungsbeispiels des Erkennungsverfahrens einer mechanischen Blockierung. Die Nulldurchgangszeit wird erfasst (Schritt 902) und der Motorstrom gemessen (904) und mathematisch verknüpft. Daraus wird gemäß obiger Formel der Ersatzwiderstand RBEMF berechnet (906), der eine Kenngröße ist. Alternativ oder zusätzlich wird ein Ersatzleitwert GBEMF als Kehrwert des Ersatzwiderstands berechnet (nicht gezeigt). Der Ersatzwiderstand RBEMF wird mit einem Ersatzwiderstand-Grenzwert verglichen (908). Fällt der berechnete Ersatzwiderstand RBEMF unter den Ersatzwiderstand-Grenzwert, liegt eine Blockierung des Elektromotors oder der zu verstellenden Vorrichtung vor und der Elektromotor („Motor“ in den Figuren) wird gestoppt (910).
-
In dem betrachteten Beispiel sei eine Motorkonstante ke von 17,4 mVs/rad, eine Drehzahl n von 2499 min-1 und ein Motorstrom I von 220 mA angenommen. Daraus kann mit den obigen Gleichungen der Ersatzwiderstand-Grenzwert berechnet werden. Zusätzlich kann der Ersatzwiderstand-Grenzwert mit einem Ausgleichswert beaufschlagt sein, um eine Verwechselung von Grenzlast mit einer Blockierung zu vermeiden.
-
Optional kann ein Zähler eine Anzahl von aufeinander folgenden Fällen registrieren, in denen eine Blockierung erkannt wurde. 10 zeigt ein entsprechendes Ablaufdiagramm 1000. Jedes Mal, wenn der berechnete Ersatzwiderstand RBEMF unter den Ersatzwiderstand-Grenzwert abfällt (im Vergleichsschritt 908), wird ein Signal erzeugt und in der Zählereinheit gespeichert, d.h. der Zähler erhöht sich um eins (1002). Falls der berechnete Ersatzwiderstand RBEMF wieder unter den Ersatzwiderstand-Grenzwert abfällt (908), wird der Zähler zurückgesetzt (1004). Übersteigt der Zähler einen vordefinierten Grenzwert (1006), z.B. 20, wird eine mechanische Blockierung erkannt und der Motor gestoppt (1008). Anderenfalls wird in den Schritt 902 zur Erfassung der Nulldurchgangszeit zurück gesprungen.
-
Durch die Verwendung des Zählers kann ein fehlerhaftes Erkennen von Blockierungen vermieden werden sowie Schwankungen der Nulldurchgangszeit und des Motorstroms kompensiert werden.
-
11 zeigt ein Ablaufdiagramm 1100 für ein weiteres Ausführungsbeispiel des Erkennungsverfahrens einer mechanischen Blockierung, bei dem die Nulldurchgangszeit und der Motorstrom über eine UND-Verknüpfung miteinander verknüpft sind.
-
Analog zum ersten Ausführungsbeispiel werden die Nulldurchgangszeit ermittelt (902) und der Motorstrom gemessen (904) und daraus der Ersatzwiderstand RBEMF bestimmt (906). Zusätzlich wird die erste Ableitung des Ersatzwiderstands RBEMF nach der Zeit gebildet (nicht gezeigt), die eine Steigung des Ersatzwiderstands RBEMF angibt. Alternativ oder zusätzlich kann der gleiche Prozess mit dem Ersatzleitwert GBEMF durchgeführt werden.
-
Der Ersatzwiderstand RBEMF wird mit einem Ersatzwiderstand-Grenzwert verglichen (908). Falls der Ersatzwiderstand RBEMF unter den Ersatzwiderstand-Grenzwert sinkt, wird die Steigung des zeitlichen Verlaufs, d.h. die erste Ableitung nach der Zeit, des Ersatzwiderstandes RBEMF betrachtet (1102). Ein negatives Vorzeichen der ersten Ableitung bedeutet, dass der Ersatzwiderstand RBEMF sinkt und dass eine mechanische Blockierung vorliegt. Beispielsweise wird die Steigung erst dann betrachtet, wenn der Ersatzwiderstand RBEMF unter den Ersatzwiderstand-Grenzwert abfällt. Falls also der Ersatzwiderstand RBEMF unter den Ersatzwiderstand-Grenzwert abfällt UND die Steigung des Ersatzwiderstand RBEMF negativ ist, wird eine mechanische Blockierung erkannt und der Elektromotor gestoppt (1104).
-
Wenn der Elektromotor in Grenzlast betrieben wird, unterschreitet der Ersatzwiderstand RBEMF mehrfach den Ersatzwiderstand-Grenzwert aufgrund von Schwankungen der Messwerte, selbst wenn der Ersatzwiderstand RBEMF im Mittel unverändert bleibt. Die Betrachtung des Ersatzwiderstands RBEMF und seiner Steigung macht einen Ausgleichswert überflüssig. Somit kann das Verfahren, insbesondere bei geringeren Lasten, schneller auf eine mechanische Blockierung reagieren.
-
12 zeigt ein Ablaufdiagramm 1200 für ein weiteres Ausführungsbeispiel des Erkennungsverfahrens einer mechanischen Blockierung. Nachdem die Nulldurchgangszeit und der Motorstrom bestimmt sind (902, 904), wird die mechanische Blockierung erkannt und der Elektromotor gestoppt (1206), wenn sowohl die Nulldurchgangszeit als auch der Motorstrom den jeweiligen Grenzwert übersteigen. Obwohl in 12 zuerst die Nulldurchgangszeit und danach erst der Motorstrom mit dem jeweiligen Grenzwert verglichen werden (1202, 1204), ist diese Reihenfolge nur beispielhaft. Es können auch zuerst der Motorstrom und dann die Nulldurchgangszeit geprüft werden, oder beide Größen können gleichzeitig geprüft werden.
-
Demnach sind die Nulldurchgangszeit und der Motorstrom über eine UND-Verknüpfung miteinander verknüpft. Die Kenngröße im Sinne des vorgeschlagenen Verfahrens kann durch ein logisches Signal (z.B. „0“ oder „1“) der überprüfenden Einheit (wie z.B. eine Steuereinheit, eine Prozessoreinheit, ein Rechner, oder dergleichen) gebildet sein.
-
Somit werden Abschaltkriterien bezüglich der Nulldurchgangszeit und bezüglich des Motorstroms über die UND-Verknüpfung miteinander verknüpft. Dadurch ist es möglich, den jeweiligen Grenzwert im Vergleich zu herkömmlichen Verfahren niedrig zu halten, ohne dass Blockierungen fälschlicherweise erkannt werden. Das vorgeschlagene Erkennungsverfahren ist also schneller und gleichzeitig zuverlässig.
-
Mit dem beschriebenen Verfahren sowie den Ausführungsformen können Schrittverluste vermieden werden, die Abschaltzeit gegenüber den konventionellen Verfahren verkürzt werden und/oder eine mechanische Blockierung zuverlässig erkannt werden. Ferner funktionieren das Verfahren sowie die Ausführungsformen bei verschiedenen Aktuatorvarianten und weitgehend drehzahlunabhängig.
-
Somit kann eine mechanische Blockierung schon bei Überschreitung des Nennmoments um +0,1 Nm erkannt werden. Dadurch kann Beschädigungen einer durch den Elektromotor zu verstellenden Vorrichtung, wie z.B. eines Kühlergrills, vorgebeugt werden.
-
Zudem kann eine Steuereinheit vorgesehen werden, die neben weiteren Peripherieeinheiten für die Ansteuerung von Motoren auch an die Fahrzeugumgebung angepasste Peripherie aufweist. 13 zeigt eine schematische Ansicht eines Beispiels der Steuereinheit. 13 zeigt im Einzelnen einen Elektromotor 1310, der über ein Getriebe 1312 mit einem Stellglied 1314 gekoppelt ist und dieses antreibt. Die Steuereinheit 1316 umfasst eine integrierte Leistungselektronik 1318, ein EPWM-Modul 1320, ein BEMF-Modul 1322, eine CPU 1326, einen Speicher 1328, einen AD/DA-Wandler 1330, und ein LIN-Modul 1332.
-
Die oben genannten Motortreiber sind in 13 als die integrierte Leistungselektronik 1318 bezeichnet, die Hochleistungshalbbrücken sind. Damit kann der Elektromotor 1310 ohne zusätzliche Beschaltung angesteuert werden, wodurch zusätzliche Bauteile eingespart werden.
-
Zur Ansteuerung der Halbbrücken dient das EPWM-Modul 1320, das aus drei identischen Einheiten bestehen kann, mit denen die drei Halbbrücken individuell geschaltet werden können. Über das EPWM-Modul 1320 kann das Tastverhältnis des PWM-Signals eingestellt werden. So kann der angeschlossene Elektromotor gesteuert werden. Ferner kann der EPWM ein Triggersignal für den AD/DA-Wandler 1330 erzeugen.
-
Des Weiteren verfügt die Steuereinheit über das BEMF-Modul 1322, mit dem der Nulldurchgang der BEMF-Spannung detektiert wird. Das BEMF-Modul 1322 besteht aus integrierten Komparatoren, die die BEMF-Spannung mit einer virtuellen Sternpunktspannung vergleichen, um den Nulldurchgang zu detektieren. Das Modul enthält zudem zwei digitale Filter um schnelle Signaländerungen zu glätten, um falsche Nulldurchgangssignale zu verhindern.
-
Optional umfasst die Steuereinheit eine Capture-Compare-Einheit (nicht gezeigt),mit Hilfe derer die detektierten Nulldurchgänge als Interrupts registriert werden. Die Capture-Compare-Einheit ist so konfiguriert, dass drei Kanäle parallel gemessen und verarbeitetet werden können. Damit können die Komparatorsignale der Nulldurchgangsmessung im sensorlosen Betrieb oder die Hallsensorsignale im sensorbasierten Betrieb ausgewertet werden.
-
Optional verfügt die Steuereinheit über eine interne Temperaturüberwachung, die bei Bedarf die Steuereinheit abschaltet, um sie vor Überhitzung durch die Wärmebildung im Elektromotor zu schützen. Die gemessene Temperatur kann mit einem AD/DA-Wandler 1330 ausgelesen werden. Die Messung der Temperatur kann insbesondere dann wichtig sein, wenn die Blockiererkennung basierend auf dem Motorstrom durchgeführt wird, da der Motorstrom temperaturabhängig ist und der Motorstrom-Grenzwert an die Motortemperatur angepasst werden muss.
-
Mit Hilfe des AD/DA-Wandlers 1330 kann neben der Temperatur auch der Motorstrom und die BEMF-Spannung von einer Mikro-Steuereinheit gemessen werden. Die Messung der BEMF-Spannung eignet sich insbesondere für Schrittmotoren.
-
Der Speicher 1328 kann ich verschiedene Speichermedien gebildet werden, beispielsweise ein ROM, ein Flash-Speicher, ein SRAM oder ein NVRAM. Er kann zum Speichern von Parametern und Grenzwerten verwendet werden.
-
Das LIN-Modul 1332 kann mit über einen LIN-Bus in einem Kraftfahrzeug mit der zentralen Steuereinheit (ECU) des Fahrzeugs kommunizieren.
-
Bezugszeichenliste
-
- 11
- Widerstand
- 12
- Induktivität
- 13
- (Ersatz-)Spannungsquelle/BEMF-Spannung
- 20
- Elektromotor/BLDC-Motor
- 21
- Rotor
- 22
- Stator
- 23
- Magnet
- 24 - 26
- Zahn
- 27 - 29
- Statorspule
- 60
- Steuereinheit
- 61, 61', 61"
- Motorstrom
- 62, 62', 62"
- Drehzahl
- 63, 64
- Knotenpunkt/Subtrahierer
- 65
- Stromregler
- 66
- Drehzahlregler
- 67
- erstes Schaltverhältnis
- 68
- zweites Schaltverhältnis
- 69
- Logikeinheit
- 70
- Tastverhältnis
- 900
- Ablaufdiagramm
- 902 - 910
- Verfahrensschritt
- 1000
- Ablaufdiagramm
- 1002 - 1008
- Verfahrensschritt
- 1100
- Ablaufdiagramm
- 1102, 1104
- Verfahrensschritt
- 1200
- Ablaufdiagramm
- 1202 - 1206
- Verfahrensschritt
- 1310
- Elektromotor
- 1312
- Getriebe
- 1314
- Stellglied
- 1316
- Steuereinheit
- 1318
- integrierte Leistungselektronik
- 1320
- EPWM-Modul
- 1322
- BEMF-Modul
- 1326
- CPU
- 1328
- Speicher
- 1330
- AD/DA-Wandler
- 1332
- LIN-Modul
- R
- Drehachse
- U, V, W
- Phase