-
ALLGEMEINES
ZUR ERFINDUNG
-
Die
vorliegende Erfindung bezieht sich auf Aktorenmaterialien und insbesondere
bezieht sie sich auf Materialien, die eine Betätigungsreaktion auf eine von
außen
angelegte Stimulierung wie zum Beispiel einen angelegten Feldreiz
zeigen können.
-
Die
Fähigkeit,
Aktorenmaterialien für
die Erzeugung von Bewegung und Kraft als Reaktion auf einen angelegten
Reiz wirksam einzusetzen, wird in hochentwickelten Einsatzgebieten
im Förderbereich
und im Bereich der Luft- und Raumfahrttechnik, bei hochmodernen
Automatisierungs- und Herstellungsprozessen und in einer großen Palette
weiterer Bereiche zunehmend bedeutsam. Von besonderem Interesse
ist die Entwicklung von Aktorenmaterialien mit hohen Spannungen,
erheblicher Krafterzeugung und kurzer Reaktionszeit beim Ansprechen
auf eine Stimulierung von außen.
Zu den allgemein beliebten Gruppen von Aktorenmaterialien gehören piezoelektrische,
magnetostriktive Aktorenmaterialien und Werkstoffe mit Formgedächtnis;
es wurde festgestellt, dass jede dieser drei Gruppen sowohl Vorteile
in der Leistung als auch Einschränkungen bei
ihren Fähigkeiten
in der Betätigung
besitzt.
-
Im
typischen Fall handelt es sich bei piezoelektrischen Werkstoffen
um Keramikmaterialien, z. B. Blei-Zirkonat-Titanat, und sie zeichnen
sich durch ihre Fähigkeit
aus, sich im Ansprechen auf ein angelegtes elektrisches Feld bei
der Demonstration des umgekehrten piezoelektrischen Effekts mechanisch
zu verformen, d. h. sich auszudehnen und zusammenzuziehen. Piezoelektrische
Betäti gungselemente
aus Keramikmaterial, die herkömmlicherweise
in Reihe in gestapelter Form verwendet werden, zeigen eine akzeptable
Ausgangs-Energiedichte und außerdem
eine sehr große
Bandbreite, d. h. einen vergleichsweise schnellen Betätigungshub.
Eine piezoelektrische Stapelstruktur ist jedoch im Allgemeinen nur
auf einen vergleichsweise kleinen Hub beschränkt und kann im typischen Fall
nur eine begrenzte Ausgangskraft erzeugen, was weitgehend auf die
charakteristische Sprödigkeit
der piezoelektrischen Werkstoffe zurückzuführen ist. Infolgedessen werden
von einem Aktor, der ein piezoelektrisches Aktorenmaterial enthält, Hubmechanismen
und Mechanismen zur Kraftverstärkung
gefordert, doch kann auf vielen Einsatzgebieten die begrenzte piezoelektrische
Betätigungskraft
für die
jeweilige Anwendung in der Praxis nicht ausreichend groß gemacht
werden.
-
Magnetostriktive
Aktorenmaterialien zeichnen sich im typischen Fall dadurch aus,
dass sie in der Lage sind, eine Betätigungskraft und einen Betätigungshub
zu erzeugen, die größer als
bei den piezoelektrischen Materialien. Die Anlegung eines Magnetfelds
an ein magnetostriktives Material veranlasst den Werkstoff zur Ausbildung
von Spannungen, je stärker
sich die Vektoren des Materials zur Bereichsmagnetisierung drehen, um
sich auf die Richtung des angelegten Magnetfelds auszurichten. Die
Zelleinheiten des Materials erfahren durch die Drehung bei der Magnetisierung
eine elastische Verformung, doch verändert sich ihre Ausrichtung nicht.
-
Es
hat sich gezeigt, dass Legierungen aus seltenen Erden die stärksten magnetostriktiven
elastischen Verformungen aufweisen, z. B. zeigt sich bei der Laves-Phase
bei TbFe2 eine Magnetostriktion λ von etwa 1753 × 10–6 bei
Zimmertemperatur in einem angelegten Feld von etwa 1,98 × 1010 Alm (25 kOe), und bei dem pseudo-binären Material
nahe Null – Tb0,27Dy0,73Fe2 – das
auf dem Markt als Terfenol-D® bekannt ist, zeigt sich eine
einfache Achsen-Magnetostriktion λ111 von etwa 1600 × 10–6 in
Felder von der Größenordnung
von etwa 7,95 × 108 A/m (1 kOe). Der Begriff „leichte
Achse" wird in diesem
Zusammenhang in dem Sinn verwendet, dass er sich auf die Kristallachse
bezieht, entlang welcher ein Magnetisierungsvektor eines Bereichs
lieber bei Fehlen eines angelegten Feldes liegt; die leichte Achse
ist somit die Richtung einer einfachen Magnetisierung für einen
Bereich.
-
Die
Belastungen bzw. Spannungen und die entsprechenden Kräfte, die
von intermetallischen Stoffen auf Fe-Dy-Tb-Basis wie zum Beispiel
Terfenol-D® entwickelt
werden, können
beträchtlich
größer als
die Spannungen und Kräfte
bei piezoelektrischen Werkstoffen sein, und die Werte der Energiedichte
bei solchen intermetallischen Werkstoffen können in einer Größenordnung
liegen, die größer als
bei herkömmlichen
Betätigungs-
bzw. Aktorensystemen ist, zum Beispiel bei hydraulischen Anlagen.
Die elastische Verformung zeigt bei unbelastetem Terfenol-D® eine
Feldempfindlichkeit von etwa 0,6 × 10–6 pro
79,5775 A/m (Oe) unter dem Einfluss eines Magnetfelds von etwa 7,95 × 108 A/m (1.000 Oe) und bei vorgespannten Materialauslegungen kann
eine sogar noch höhere
Spannungsempfindlichkeit gegenüber
einem angelegten Feld ermöglicht
werden.
-
Während magnetostriktive
Aktorenelemente tatsächlich
ein Ansprechverhalten mit Betätigung
mit hoher Frequenz zeigen, werden sie grundlegend durch ihre elektrische
Leitfähigkeit
eingeschränkt,
was auf Grund von Wirbelstrombildungen in dem Werkstoff als Reaktion
auf ein sich veränderndes
angelegtes Magnetfeld den Betrieb bei sehr hohen Betätigungsfrequenzen
ausschließt,
sofern nicht mindestens eine der Werkstoffabmessungen der Elemente
senkrecht zu dem Feld klein ist. Eine zusätzliche einschränkende Beschränkung besteht
bei magnetostriktiven Werkstoffen darin, dass sie sich im typischen
Fall durch einen Betätigungshubauszeichnen,
der wie bei den piezoelektrischen Betätigungselementen hinsichtlich
seines Umfangs eingeschränkt
ist, im vorliegenden Fall aufgrund der Bereichsdehnung, die dem
Betätigungsmechanismus
innewohnt.
-
Die
Gruppe von Aktorenmaterialien, die als Legierungen mit Formgedächtnis bekannt
ist, zeichnet sich dadurch aus, dass eine Legierung mit Formgedächtnis bei
plastischer Verformung bei einer bestimmten Temperatur oder einer
bestimmten Belastungsbedingung in einer Phase, die als martensitische
Phase bekannt ist, ihre ursprüngliche
Form wieder einnehmen kann, wenn sie einer für die Legierung spezifischen
Temperatur oder Spannungsbedingung für den Phasen übergang
vom martensitischen in den austenitischen Zustand ausgesetzt wird,
welche das Material in eine entsprechende austenitische Phase zurückführt. Diesem
Effekt liegt die Zurückführung von
Zwillingsvarianten der martensitischen Phase des Materials in ihre
Form im austenitischen Zustand zugrunde. Solche Materialien sind
in der Lage, eine große,
durch Spannung herbeigeführte martensitische
Verformung rückgängig zu
machen, wenn sie zurück
in die austenitische Phase transformiert werden, und damit können sie
einen Wirkungsmechanismus mit großem Betätigungshub ermöglichen.
Des Weiteren gilt die wieder aufbaubare Belastung, die eine Legierung
mit Formgedächtnis
aufnehmen kann, im Allgemeinen als die stärkste elastische Verformung,
die bei jedem Aktorenmaterial erzielt werden kann, und diese kann
sogar etwa 20% betragen, beispielsweise bei einer Legierung aus
Kupfer, Aluminium und Nickel.
-
Der
große
Hub, der im Allgemeinen charakteristisch für Legierungen mit Formgedächtnis ist,
wird durch die typischerweise sehr lange Zeit in der Reaktion der
Werkstoffe in der Betätigung
wieder aufgehoben, wenn der Übergang
aus dem martensitischen in den austenitischen Zustand thermisch
gesteuert wird. Infolgedessen kann die Betätigung unter der Wirkung des
Formgedächtnisses
keine Einsatzbereiche abdecken, die auch nur mäßig hohe Betätigungsfrequenzen
voraussetzen. Außerdem
zeichnet sich die Transformation beim Formgedächtnis im Allgemeinen durch
einen schlechten Wirkungsmechanismus bei der Energieumwandlung aus;
ein großer
Teil der Wärme,
die dem Material zugeführt
wird, um den Übergang
aus dem martensitischen in den austenitischen Zustand anzusteuern,
geht unkontrollierbar in die Umgebung verloren. Die thermische Steuerung
des Formgedächtnis-Effekts
schränkt
auch den zulässigen
Temperaturbereich bei den Betriebstemperaturen bei einer Anwendung
ein, für
die eine Legierung mit Formgedächtnis
eingesetzt werden soll.
-
In
den Fachaufsätzen „Magnetisch
gesteuerte Legierungen mit Formgedächtnis: eine neue Klasse von Aktorenmaterialien" im „Journal
of Materials Engineering and Performance", Jahrgang 5, Nr. 3, 1. Juni 1996, Seiten
405–409,
XP000593943, und „Aktorenmaterialien
für großen Hub
und mit hoher Festigkeit für
adaptive Strukturen",
der als Beitrag bei der Dritten Internationalen Konferenz über Intelligente
Werkstoffe, 3.–5.
Juni 1996, Lyon, vorgetragen wurde; Conference Proceedings, Seiten
505–510,
1996; SPIE, USA, XP002047296, hat K. Ullakko nachgewiesen, dass
sich ein magnetisch gesteuerter Effekt des Formgedächtnisses
in ausgewählten
ferromagnetischen Werkstoffen nachweisen lässt, wie zum Beispiel in Ni2MnGa, in denen die martensitischen Grenzflächen gleitfähig sind
und die anisotrope Energie des Materials ausreichend hoch ist.
-
Bei
vielen Einsatzbereichen von Aktoren wird im Idealfall eine Kombination
aus dem großen
Betätigungshub,
den die Legierungen mit Formgedächtnis
bieten, mit der kurzen Reaktionszeit in der Betätigungsaktion bei magnetostriktiven
und piezoelektrischen Materialien bevorzugt. Gleichzeitig werden
auch vorzugsweise die thermischen Einschränkungen bei piezoelektrischen
und magnetostriktiven Werkstoffen und Werkstoffen mit Formgedächtnis beseitigt.
Ein einziges Aktorenmaterial, das alle diese Qualitäten in sich
vereinigt, war bisher unter praktischen Betriebsbedingungen nicht
realisierbar.
-
KURZBESCHREIBUNG
DER ERFINDUNG
-
Die
vorliegende Erfindung überwindet
die Einschränkungen
bei herkömmlichen
Aktorenmaterialien und schafft so ein magnetisch gesteuertes Aktorenmaterial,
das einen großen
Hub in der Aktorenbetätigung erbringt,
der eine kurze Reaktionszeit in der Aktion und einen Betrieb mit
entsprechend hoher Arbeitsfrequenz mit sich bringt und eine effiziente
Umwandlung der Betätigungsenergie
unter günstigen
Betriebstemperaturen ermöglicht.
-
Ein
Betätigungselement
gemäß der vorliegenden
Erfindung wird in Anspruch 1 beansprucht.
-
Gemäß einem
Aspekt der Erfindung sieht diese ein Aktorenelement vor, das ein
Aktorenmaterial aufweist, welches über einer charakteristischen
Phasenübergangs-Temperatur,
die höher
ist als etwa –10°C, eine austenitische
Kristallstruktur besitzt und unter der Phasenübergangs-Temperatur eine martensitische
Zwillings-Kristallstruktur aufweist. Bei einem Ausführungsbeispiel
handelt es sich bei dem Aktorenmaterial um eine Legierungszusammensetzung,
die als Ni65–x–yMn20+xGa15+y definiert
ist, wobei x zwischen 3 Atom-% und 15 Atom-% liegt und y zwischen
3 Atom-% und 12 Atom-Prozent liegt. Gemäß einem Aspekt der Erfindung
zeichnet sich dabei das Aktorenmaterial durch eine magnetisch-kristalline
anisotrope Energie aus, die ausreicht, um eine Bewegung von Zwillingsgrenzen
der martensitischen Zwillings-Kristallstruktur im Ansprechen auf
das Anlegen eines Magnetfeldes an die martensitische Zwillings-Kristallstruktur
zu ermöglichen.
Dies macht es dem Material möglich,
im Ansprechen auf das Magnetfeld einen Betätigungshub zu erzeugen.
-
Auf
der Grundlage dieses Wirkungsmechanismus überwinden die erfindungsgemäß vorgesehenen Aktorenmaterialien
die Einschränkungen
beim Wärmeverhalten,
im Hubverhalten und im Frequenzverhalten, die typischerweise mit
Aktorenmaterialien verknüpft
sind, und ermöglichen
eine Klasse von Aktoren mit großem
Hub und hoher Geschwindigkeit, welche bei günstigen Einsatztemperaturen
verwendet werden können.
-
Bei
Ausführungsbeispielen,
die erfindungsgemäß vorgesehen
sind, handelt es sich bei dem Aktorenmaterial um eine Legierungszusammensetzung,
die als Ni65–x–yMn20+xGa15+y definiert
ist, wobei x zwischen 6 Atom-% und 10 Atom-% liegt und y zwischen
5 Atom-% und 9 Atom-Prozent liegt, oder bei dem x zwischen 12 Atom-%
und 15 Atom-% und y zwischen 3 Atom-% und 6 Atom-% liegt, oder bei
dem x zwischen 10 Atom-% und 14 Atom-% und y zwischen 3 Atom-% und
6 Atom-% liegt, oder bei dem x zwischen 7 Atom-% und 11 Atom-% und
y zwischen 3 Atom-% und 7 Atom-% liegt.
-
Bei
anderen Ausführungsbeispielen,
die gemäß der Erfindung
vorgesehen sind, handelt es sich bei dem Aktorenmaterial um eine
polykristalline Legierungszusammensetzung, die als (NiaFebCoc)65–x–y(MndFeeCof)20+x(GagSihAl)15+y definiert
ist, wobei x zwischen 3 Atom-% und 15 Atom-% liegt und y zwischen
3 Atom-% und 12 Atom-% liegt, und wobei a + b + c = 1 ist, wobei
die Beziehungen d + e + f = 1 und g + h + i = 1 gelten. Bei bevorzugten
Ausführungsbeispielen
liegt b zwischen Null und 0,6, liegt c zwischen Null und 0,6, und
sind e, f, h und i jeweils Null, oder sind b und c jeweils Null,
liegt e zwischen etwa Null und etwa 0,6, liegt f zwischen Null und
0,6 und betragen h und i jeweils Null, oder sind b, c, e und f jeweils
Null, liegt h zwischen Null und 0,5 und liegt i zwischen Null und
0,5.
-
Bei
anderen Ausführungsbeispielen
handelt es sich bei dem Aktorenmaterial um eine Legierungszusammensetzung,
die als CoaMnb(CrmPtnPdoAupNbqNir)c definiert ist, bei welcher a + b + c =
100 ist und m + n + o + p + q + r = 1 ist. Bei einem anderen Ausführungsbeispiel
handelt es sich bei dem Aktorenmaterial um eine Legierungszusammensetzung,
bei welcher a + b = 100 ist und a dabei zwischen 60 und 90 liegt
und b einen Wert zwischen 10 und 40 aufweist.
-
Entsprechend
einem weiteren Aspekt der Erfindung zeichnet sich das Aktorenmaterial
durch eine Form mit einer langen Dimension aus, wobei das Aktorenmaterial
so konfiguriert ist, dass es die Anlegung eines statischen magnetischen
Vorspannfelds über
eine Materialdimension, die nicht die lange Abmessung ist, und die
Anlegung eines veränderlichen
magnetischen Betätigungsfelds über die
fange Dimension des Materials aufnehmen kann. Dadurch wird die Erzeugung
eines Betätigungshubs
entlang der langen Abmessung des Materials möglich. Bei bevorzugten Ausführungsbeispielen
zeichnet sich das Aktorenmaterial durch einen Zustand der Vorbetätigung aus,
bei welchem ein wesentlicher Teil der martensitischen Zwillingsgrenzen
zu dem statischen magnetischen Vorspannfeld ausgerichtet ist. Vorzugsweise
ist das Aktorenmaterial dabei so aufgebaut, dass es die Anlegung
eines magnetischen Betätigungsfeldes
in einer Ausrichtung aufnehmen kann, die mit einer ausgewählten martensitischen
Ausrichtung der Zwillingsgrenzen des Materials zusammenfällt. Das Aktorenmaterial
besitzt dabei vorzugsweise eine martensitische Zwillings-Kristallstruktur,
die sich durch eine Anzahl t von ausgeprägten Zwillingsvarianten auszeichnet,
die unter 5 und vorzugsweise unter 3 liegt.
-
Die
erfindungsgemäßen magnetisch
gesteuerten Aktorenmaterialien eignen sich sehr gut für eine breite
Palette von Einsatzbereichen für
Aktoren, darunter die Robotik, die Fertigung und die Automatisierung,
die Fördertechnik,
die Luft- und Raumfahrt, die Biotechnologie, die mikro-elektromechanischen
Systeme, intelligente Detektoren- und Messwandler-Systeme und sind
ganz allgemein bei Einsatzgebieten überlegen, bei denen sich die Überlegungen
auf Rauschen, Schwingungen, Hub, Geschwindigkeit, Temperatur und
Leistungsfähigkeit
beziehen. Weitere Merkmale und Vorteile der erfindungsgemäßen Werkstoffe
ergeben sich aus der nachstehenden ausführlichen Beschreibung und den
beiliegenden Zeichnungen sowie aus den Ansprüchen.
-
KURZBESCHREIBUNG
DER ZEICHNUNGEN
-
1A–1B stellen
schematisch die Betätigung
einer Bewegung einer martensitischen Zwilingsgrenze durch ein Magnetfeld
gemäß der Erfindung
für zwei
Zwillings-Ausrichtungen dar;
-
2A–2B sind
schematische Darstellungen der Betätigung einer Bewegung einer
in 1A–1B gezeigten
martensitischen Zwillingsgrenze durch ein Magnetfeld dar, die hier
in eher makroskopischem Maßstab
gezeigt sind;
-
3A ist
eine schematische Darstellung der Vektordrehung und der Bewegung
einer Zwilingsgrenze im Ansprechen auf ein angelegtes Magnetfeld
für eine
schwache magnetisch-kristalline anisotrope Energiegrenze;
-
3B stellt
schematisch die Vektordrehung zur Magnetisierung und die Bewegung
der Zwillingsgrenze im Ansprechen auf ein angelegtes Magnetfeld
für eine
starke magnetisch-kristalline anisotrope Energiegrenze dar;
-
4 ist
eine graphische Darstellung einer optimalen Ausrichtung des magnetischen
Betätigungsfeldes θ0 in Abhängigkeit
von φ,
dem Winkel zwischen Zwillingsvarianten, die in günstiger Weise zum magnetischen
Betätigungsfeld
ausgerichtet sind, und Zwillingsvarianten, die in ungünstiger
Weise zum magnetischen Betätigungsfeld
ausgerichtet sind;
-
5 ist
eine graphische Darstellung der Magnetisierung M in Abhängigkeit
von dem angelegten Magnetfeld H für eine Probe aus Ni2MnGa bei einer Temperatur von etwa 256 K
und bei einer Temperatur von etwa 299 K;
-
6 zeigt
eine graphische Darstellung der elastischen Verformung in Abhängigkeit
von der Temperatur für
eine Probe aus Ni2MnGa ohne Anlegung eines
magnetischen Betätigungsfeldes
und mit Anlegung Ni2MnGa eines magnetischen
Betätigungsfeldes
von etwa 795 × 106 A/m (10 kOe);
-
7A und 7B stellen
in schematisierter Form einen Versuchsaufbau zum Messen der elastischen
Verformung einer Probe aus Ni2MnGa unter
einem angelegten magnetischen Betätigungsfeld für einen Fall
dar, in dem die elastische Verformung in einer Richtung senkrecht
zum angelegten Feld bzw. parallel zum angelegten Feld gemessen wird;
-
7C ist
eine graphische Darstellung der elastischen Verformung bei einer
Probe aus Ni2MnGa, die für die beiden in 8A und 8B dargestellten
Ausbildungen bei einer Temperatur von etwa 283 K gemessen wird;
-
7D zeigt
eine graphische Darstellung der elastischen Verformung bei einer
Probe aus Ni2MnGa, die in Abhängigkeit
von dem angelegten Magnetfeld gemessen wird, wie bei den beiden
Ausbildungen aus 8A und 8B bei
einer Temperatur von etwa 265 K gemessen;
-
8 ist
eine graphische Darstellung der resultierenden elastischen Verformung
Ni2MnGa in Abhängigkeit einer erzeugten Kraft
bei einer Probe aus Ni2MnGa und bei einem
piezoelektrischen Aktor aus PZT sowie einem magnetostriktiven Aktor
aus Terfenol-D®;
-
9 zeigt
eine graphische Darstellung der Zusammensetzung in Dreiecksform
für Legierungszusammensetzungen
des NiMnGa-Systems für
Versuchszwecke, mit der gemessenen Curie-Temperatur Tc,
welche für
die Zusammensetzungen aufgetragen ist, und mit konstanten Tc Kurven, die zur Identifizierung von Bereichen
in der graphischen Darstellung mit verschiedenen Curie-Temperaturen
dargestellt sind;
-
10 zeigt
eine graphische Darstellung der Zusammensetzung in Dreiecksform
für Legierungszusammensetzungen
des NiMnGa-Systems für
Versuchszwecke, mit der gemessenen Temperatur Tmart des
martensitischen Pha senübergangs,
welche für
die Zusammensetzungen aufgetragen ist, und mit konstanten Tmart-Kurven, die zur Identifizierung von
Bereichen in der graphischen Darstellung mit verschiedenen Phasenübergangs-Temperaturen
dargestellt sind;
-
11 zeigt
eine graphische Darstellung der Zusammensetzung in Dreiecksform
für Legierungszusammensetzungen
des NiMnGa-Systems für
Versuchszwecke, mit der gemessenen Sättigungsmagnetisierung Ms, welche für die Zusammensetzungen aufgetragen
ist, und mit konstanten Ms-Kurven, die zur
Identifizierung von Bereichen in der graphischen Darstellung mit
unterschiedlicher Phasensättigungs-Magnetisierung dargestellt
sind;
-
12 stellt
eine graphische Darstellung der elastischen Verformung e0 und der Magnetisierung M dar, gemessen
als Funktion der Temperatur T bei einer Probe aus der Legierung
Ni50Mn28Ga22; und
-
13 zeigt
eine graphische Darstellung der Magnetisierung in Abhängigkeit
von der Temperatur bei einer Probe aus der Legierung Ni50,2Mn29,8Ga20 bei Anlegung
eines magnetischen Betätigungsfelds
in fünf
unterschiedlichen Stärken.
-
BESCHREIBUNG
DER ERFINDUNG
-
1A–1B und 2A–2B stellen
in schematisierter Form das Prinzip der Betätigung der erfindungsgemäß vorgesehenen
magnetisch gesteuerten Aktorenmaterialien im Betrieb dar. Diese
Werkstoffe werden ganz allgemein als intermetallische ferromagnetische
Legierungen charakterisiert, die in der martensitischen Phase bzw.
der Niedertemperatur-Phase Zwillingsvarianten des Materials zeigen.
Bei Varianten bzw. Zwillingsvarianten handelt es sich um Bereiche
in einem Kristall, die unterschiedliche kristallographische Ausrichtungen
aufweisen, während
sie gleichzeitig die Kohärenz
im Kristallgitter an den Grenzflächen
zwischen verschiedenen Varianten beibehalten, die als Zwillingsgrenzen
bezeichnet werden. Auf der Grundlage von energie-bezogenen Überlegungen
können
die Varianten nur bestimmte kristallographische Ausrichtungen annehmen.
Die Anwesenheit von Zwillingsvarianten in einem Material ermöglicht eine
grobe Verfor mung des Werkstoffs ohne die Ausbildung von Verschiebungen,
die zur plastischen Verformung führen
können.
-
Gemäß der Darstellung
in 1A, welche eine zweidimensionale Einzelzeit der
martensitischen Zwillingsstruktur zeigt, zeigen die Werkstoffe in
der martensitischen Phase Zelleinheiten mit Zwillingsvarianten,
z. B. 10, 12, 14, wobei die erste Zelle 10 so
angegeben ist, dass sie eine andere Zwillingsvariante als die zweite und
dritte Zelle 12 bzw. 14 aufweist, da die Winkelausrichtung
der kristallographischen Gegebenheiten und der Zellen-Zwillingsgrenzen
unterschiedlich ist. In einer magnetischen martensitischen Phase
besitzt jede Zelleneinheit eine charakteristische Magnetisierung,
die durch den Magnetisierungsvektor M - repräsentiert wird, der in der Zelle
entlang der Richtung orientiert ist, die als Richtung der leichten
Magnetisierung bekannt ist. Die Richtung der leichten Magnetisierung
ist hier so dargestellt, dass sie aus Gründen der Klarheit parallel
zur Seite Zelleneinheiten verläuft,
doch ist dies nicht unbedingt der Fall. Bei der Zwillingsgrenze 16 in
der zuvor definierten Bedeutung handelt es sich um die Grenze an
der Kante von zwei Zwillingsvarianten, die hier die Grenze zwischen
den beiden Zelleneinheiten 10, 12 darstellt; somit
gilt die Grenze zwischen zwei Zelleneinheiten 12, 14,
welche die gleiche Zwillingsvariante aufweisen, gilt somit nicht
als Zwillingsgrenze.
-
Gemäß der Darstellung
in 1B drehen sich nach Anlegung eines äußeren Magnetfelds
H die Zwillingsvarianten, deren Magnetisierungsvektor in weniger
günstiger
Weise bezüglich
des angelegten Feldes orientiert ist, z. B. die Zelleneinheiten 12, 14,
physikalisch bezüglich
des angelegten Feldes, da deren Magnetisierungsvektoren zur Ausrichtung
zum Feld veranlasst werden. 1B stellt
einen Zustand dar, in dem die Stärke
des angelegten Feldes die zweite Zelleneinheit 12 dreht,
nicht aber die dritte Zelleneinheit 14. Dabei ist dies
in der Weise zu verstehen, dass die Ausrichtung des angelegten Feldes
bezüglich
der Zelleneinheiten hier aus Gründen
der Klarheit nur in schematisierter Form dargestellt ist; bevorzugte
Feldausrichtungen werden nachstehend noch erläutert. Die erste Zelleneinheit 10,
die eine Magnetisierungs-Ausrichtung.
-
Aufweist,
die ursprünglich
bezüglich
des angelegten Magnetfeldes günstig
war, dreht sich dabei nicht. Infolgedessen zeigt sich, dass sich,
sobald sich die zweite Zelleneinheit 12 bezüglich des
angelegten Feldes dreht, die Zwillingsgrenze zu einer Stelle 18 bewegt
die nun zwischen der zweiten und dritten Zelleneinheit 12 und 14 liegt.
-
Es
wird nun auf 2A–2B Bezug
genommen, welche die Technik der Steuerung der magnetischen Betätigung in
einem eher makroskopischen Maßstab
darstellt, wobei dann, wenn kein Magnetfeld angelegt ist, martensitische
Zwillingsvarianten 0, 22 vorhanden sind und zwei
entsprechende Zwillingsgrenzen 24, 26 in dem Werkstoff
definieren. Die Magnetisierung der Zelleneinheiten ist explizit
zwar nur in der letzten Spalte der Zellen ausgewiesen, doch ist
dies in dem Sinne zu verstehen, dass alle Zellen eine charakteristische
Magnetisierung besitzen. Die Anlegung eines Magnetfelds in der in 2B dargestellten
Ausrichtung führt
dazu, dass sich einige der Zelleneinheiten des ersten Zwillings 20 in
der Weise drehen, dass sich die Vektoren der Magnetisierung der
Zelleneinheiten dieses Zwillings zur Feldrichtung genauso ausrichten,
wie dies der Vektor der Magnetisierung der zweiten Zwillings-Zelleneinheiten
bereits getan hat; infolgedessen weisen nach Anlegung des Feldes
mehr Zelleneinheiten den zweiten Zwillingstyp 22 auf. Das
Magnetfeld steuert dadurch die Neu-Orientierung der martensitischen
Zwillingsvarianten in der Weise, dass die Zwillingsvariante bzw.
Zwillingsvarianten in einer günstigen
Ausrichtung relativ zur Feldausrichtung zu Lasten anderer Zwillingsbildungen
zunehmen.
-
Im
makroskopischen Maßstab
führt die
Zunahme der Zwillingsvariante zu einer Formveränderung des Materials, was
zu einem Betätigungshub
führt.
Ein Rückstell-Betätigungshub,
der einer Wiederherstellung der ursprünglichen Form des Materials
und auch einer ursprünglichen
Ausrichtung der Zwillingsvariante entspricht, erhält man dann
durch Entfernen des angelegten Magnetfeldes unter erneuter Ausrichtung
des angelegten Magnetfeldes in eine andere Richtung oder durch andere
geeignete Maßnahmen.
Diese Betätigung
in zwei Richtungen stützt
sich nicht auf eine Temperaturveränderung als Stimulans für die Betätigung und wird
somit nicht durch die im typischen Fall langsame thermische Reaktion
von Aktorenmaterialien wie beispielsweise Legierungen mit Formgedächtnis.
-
Die
magnetisch gesteuerte Bewegung an der Zwillingsgrenze wird in Werkstoffen
gemäß der Erfindung
möglich
gemacht, bei denen festgestellt wurde, dass sie eine magnetisch-kristalline
Anisotropie-Energie besitzen, die vergleichbar der Energie – oder größer als
diese – ist,
die für
eine Bewegung der Zwillingsgrenze in diesem Werkstoff benötigt wird.
Die magnetisch-kristalline Anisotropie-Energie eines Materials ist
die Energie, die benötigt
wird, um die Magnetisierung der Zwillingsvarianten von der Achse
weg zu drehen, welche der leichten kristallographischen Magnetisierung
entspricht.
-
Bei
der vorstehenden Beschreibung wurde davon ausgegangen, dass alle
Magnetisierungsvektoren entlang ihrer leichten Achsen ausgerichtet
sind, wenn kein angelegtes Magnetfeld vorhanden ist. Wenn ein externes
Magnetfeld angelegt wird, neigen die Magnetisierungsvektoren der
Zelleneinheiten dazu, sich von ihrer Orientierung zur leichten Magnetisierung
weg zur Ausrichtung des Magnetfelds hin zu drehen. Wenn aber das Material
von einer Anisotropie-Energie charakterisiert wird, die der Energie
vergleichbar oder größer als
diese ist, die für
die Bewegung der Zwillingsgrenze benötigt wird, d. h. wenn die Anisotropie-Energie
des Materials ausreicht, um die Bewegung der Zwillingsgrenze aufzunehmen
und zu unterstützen,
dann veranlasst die Drehung der Magnetisierungsvektoren auch die
entsprechenden Zelleinheiten zu einer Drehung aus ihrer ursprünglichen
Ausrichtung als Zwillingsvariante in die Ausrichtung einer anderen
Zwillingsvariante. Diese Drehung einer Zelleinheit wird in der Weise
angesteuert, dass die neu orientierten Magnetisierungsvektoren wieder
in die Richtung der leichten Magnetisierung in den gedrehten Zelleneinheiten
verlaufen, was einem günstigen
Energiezustand entspricht. Die hohe Anisotropie-Energie legt dadurch
fest, dass die Zwillingsgrenzen sich bewegen, um die leichte Achse
der Ausrichtung der Magnetisierungsvektoren aufrechtzuerhalten.
Mit anderen Worten sind diejenigen Zwillingsvarianten, für welche
sich die Magnetisierung in einer Hochenergie-Ausrichtung relativ
zum angelegten Magnetfeld befindet, energetisch so disponiert sind,
dass sie sich umorientieren und damit diese Zwillinge zum Schrumpfen
bringen, zu gunsten der Zwillingsvarianten, für welche sich die Magnetisierung
relativ zum angelegten Magnetfeld in einer Ausrichtung mit niedriger
Energie befindet.
-
Die
erforderliche Bedingung für
die Drehung der Zelleneinheiten einer Zwillingsvariante in eine
andere lässt
sich wie folgt ausdrücken: Uk > Et +
W + E0 (1)wobei
Uk für
die magnetisch-kristalline Anisotropie-Energie steht, E1 die
Energie angibt, die für
die Bewegung der Zwillingsgrenze benötigt wird, W die externe Arbeit
ist, die von dem Aktorenmaterial zu leisten ist, und E0 einen
Term repräsentiert,
in dem die Arbeit, die durch elastische Verformung eines nicht-transformierten
Austenit-Materials geleistet wird, das vorhanden ist, die von nicht-gedrehten
martensitischen Zwillingsvarianten geleistet wird, und andere Energiefaktoren
berücksichtigt
werden. Aus diesem Ausdruck wird deutlich, dass dann, wenn das Aktorenmaterial
irgendwelche externe Arbeit verrichten soll, die Anisotropie-Energie diese Arbeit
und auch die Bewegung der Zwillingsgrenzen unterstützen muss.
-
Es
wird deutlich, dass die magnetisch gesteuerte Betätigung der
erfindungsgemäß vorgesehenen Werkstoffe
völlig
anders ist als die vorstehend dargestellte Betätigungssteuerung durch Magnetostriktion.
Um dies nochmals aufzugreifen, drehen sich bei einem magnetostriktiven
Aktorenmaterial die Magnetisierungsvektoren der Zelleneinheiten
im Ansprechen auf die Ausrichtung eines angelegten Magnetfelds,
doch drehen sich die Zelleneinheiten selbst dadurch nicht. Dies
führt zu
einer elastischen Verformung bzw. Formänderung der Zelleneinheiten,
nicht aber zu einer Bewegung der Zwillingsgrenzen. Somit lässt sich
der Betätigungsmechanismus
mit makroskopisch großem
Hub, der durch die Bewegung der Zwillingsgrenzen in erfindungsgemäß vorgesehenen
Werkstoffen möglich
wird, nicht mit magnetostriktiven Aktorenmaterialien erzielen.
-
Ohne
sich durch theoretische Überlegungen
festlegen lassen zu wollen, haben die Erfinder zwei einschränkende Fälle erkannt,
die zum Verständnis
des Einflusses eines Magnetfeldes auf die Bewegung einer Zwillingsgrenze
nützlich
sind: eine erste Grenze mit schwacher Anisotropie, an welcher die
Anisotropie-Energie Uk kleiner ist als die
Zeeman-Energie, wie vorstehend definiert wurde, und eine zweite
Grenze mit starker Anisotropie, an welcher die Anisotropie-Grenze
größer als
die Zeeman-Energie ist.
-
Es
wird nun auf 3-A Bezug genommen, wonach
bei einem Magnetfeld H, das unter einem Winkel φ gegenüber der leichten Achse bei
ungünstig
ausgerichteten Zwillingsvarianten angelegt ist, an der schwachen
Anisotropie-Grenze das Feld den Magnetisierungsvektor dieser ungünstig ausgerichteten
Varianten leicht drehen kann. Die Größe des Unterschieds in der
Zeeman-Energie, die als Δ M -·H - definiert
ist, über
jede Zwillingsgrenze legt den Umfang der Antriebskraft bei der Bewegung
der Zwillingsgrenze fest. In diesem Fall liegt über die Zwillingsgrenze kein
Unterschied in der Zeeman-Energie mehr vor, wenn sich der Magnetisierungsvektor
dreht, sondern nun besteht ein Unterschied in der Ausrichtung des
Magnetisierungsvektors über die
Zwillingsgrenze, da der Magnetisierungsvektor parallel zu einer
leichten Achse in den günstig
ausgerichteten Zwillingen verläuft
und nicht mehr entlang einer leichten Achse in den ungünstig ausgerichteten
Zwillingen.
-
Der
sich dabei ergebende Unterschied in der Anisotropie-Energie ΔE über die
Zwillingsgrenze wird durch die folgende Formel wiedergegeben: ΔE = Uksin2Φ (2)bei welcher Φ der Winkel
zwischen dem angelegten Feld und der leichten Achse der Zelleinheiten
mit der ungünstig
ausgerichteten Zwillingsvariante ist. Die Anisotropie-Energie bei
der Magnetisierung in den Zelleinheiten mit der ausgerichteten Zwillingsvariante
wird mit Null angegeben. Dieser Ansteuerdruck an der Zwillingsgrenze
ist jedoch angesichts der ursprünglichen
Annahme einer schwachen Anisotropie in diesem Fall wahrscheinlich
nicht ausreichend. Wenn mit anderen Worten die Anisotropie-Energie
im Vergleich zur Zeeman-Energie schwach ist, ist an der Zwillingsgrenze
ein zu schwacher Druck angelegt, um eine Bewegung der Grenze zu
ermöglichen.
Dieses Ergebnis ist in 3A dargestellt, aus welcher
ersichtlich ist, dass sich der Magnetisierungsvektor des Zwillings über der Zwillingsgrenze 34 gedreht
hat, dass sich aber der Zwilling selbst nicht gedreht hat. Es steht
zu erwarten, dass diese Bedingung vielleicht bei Materialien ganz
allgemein gilt, bei welchen eine Bewegung der Zwillingsgrenze ungewöhnlich einfach
ist, wobei Et im vorstehend angegebenen
Ausdruck (1) einen sehr kleinen Wert hat.
-
In
dem in 3B dargestellten Fall einer
starken Anisotropie wird die Anisotropie-Energie so definiert, dass
sie viel größer als
die Zeeman-Energie ist, die durch das angelegte Feld erzeugt wird,
und somit wird der Energieunterschied über die Zwillingsgrenze hier
als die Differenz in der Zeeman-Energie zwischen den beiden Zwillingsvarianten
angegeben. Infolgedessen ist in diesem Fall die Wahrscheinlichkeit
höher,
dass ein ausreichend hoher Antriebsdruck zur Drehung eines erheblichen
Anteils der günstig
ausgerichteten Zwillinge vorhanden ist. 3B stellt
dieses Szenario dar, bei dem wahrscheinlich eine beträchtliche
Bewegung der Zwillingsgrenze auftritt; der Magnetisierungsvektor
und der Zwilling über
der Zwillingsgrenze 36 sind hier in einem Zustand dargestellt,
in dem sie nicht gedreht sind, um so ganz allgemein zu betonen,
und eine vollständige
Bewegung der Zwillingsgrenze ist gegebenenfalls nicht ohne die Anlegung
sehr starker Magnetfelder nicht erzielbar.
-
Die
Feldausrichtung, welche die Differenz in der Zeeman-Energie der
Zwillingsvariante optimiert, und dabei dementsprechend die Auslösung der
Bewegung der Zwillingsgrenze maximiert, wird mit der Annahme gefunden,
dass die Magnetisierung in jeder Variante nach Anlegung des Feldes
zur lokalen leichten Achse dieser Variante ausgerichtet bleibt,
was also den Fall einer starken Anisotropie bedeutet, und unter
der Annahme, dass die leichten magnetischen Achse der beiden Zwillingsvarianten
unter einem Winkel Φ relativ
zu einander ausgerichtet sind, was beides in 3B dargestellt
ist.
-
Wenn
ein Magnetfeld unter einem willkürlich
gewählten
Winkel Φ relativ
zu einer leichten Achse angelegt wird, die als leichte Bezugsachse 38 ausgewählt wird,
dann lässt
sich der Energieunterschied über
die Zwillingsgrenze 36 durch folgende Beziehung wiedergeben: ΔE = MH[cosθ – cos(θ + Φ)] (3)
-
Diese
Funktion wird dann maximiert, um eine optimale Feldausrichtung θ0 zu definieren, die sich wie folgt angeben
lässt:
-
-
Diese
optimale Feldausrichtung θ0 wird in 4 als Funktion
von Φ mit θ0 relativ zur ausgewählten leichten Bezugsachse
aufgetragen; die Funktion hat sich als linear in Beziehung zu Φ stehend
erwiesen, was auch den Winkel der Zwillingsgrenze definiert. Die
optimale Feldausrichtung nimmt ab 90° bei Φ = 0 (ein bedeutungsloses Ergebnis)
bis zu 45° bei Φ = 90° ab.
-
Auf
der Grundlage dieser Beziehung haben die Erfinder hier entdeckt,
dass entgegen der Intuition die magnetische Antriebskraft auf der
Zwillingsgrenze niemals am größten ist
bei einem Feld, das parallel zur Ausrichtung des Magnetisierungsvektors
einer der Zelleinheiten der Zwillingsvariante ausgerichtet ist.
Die Erfinder haben stattdessen erkannt, dass in starkem Gegensatz
hierzu das angelegte Feld optimal so ausgerichtet ist, dass es den
Winkel zwischen den leichten Achsen der hier interessierenden Zwillingsvarianten
halbiert. Mit anderen Worten wird für den Fall einer starken Anisotropie
das angelegte Magnetfeld in optimaler Weise parallel zur Zwillingsgrenze
ausgerichtet, um so die Bewegung der Zwillingsgrenze und den entsprechenden
Betätigungshub
zu maximieren.
-
Im
Zusammenhang mit 1B und 2B wurde
vorstehend bereits ausgeführt,
dass die in diesen Figuren dargestellte Feldausrichtung nur in schematisierter
Form dargestellt ist; es wird hier nochmals betont, dass diese Figuren
keine bevorzugte Feldausrichtung darstellen; bei einem bestimmten
Material und im Falle einer starken Anisotropie ist die Ausrichtung
der Zwillingsgrenze vorzugsweise festgelegt und verläuft ein
anzulegendes Feld dann in paralleler Ausrichtung zu dieser Grenze.
Es wurde erkannt, dass die meisten Werkstoffe mehrere und gelegentlich
sehr viele unterschiedliche Ausrichtungen der martensitischen Zwillingsgrenze besitzen;
entsprechend der Erfindung ist dabei das angelegte magnetische Betätigungsfeld
zu einer ausgewählten
Ausrichtung unter den Orientierungen der Zwillingsgrenze ausgerichtet.
-
Beispiel 1
-
Die
Erfinder bei dieser Anmeldung haben erkannt, dass verschiedene einzelne
kristalline und polykristalline Zusammensetzungen der Legierung
Ni2MnGa die Kriterien hinsichtlich der magnetisch-kristallinen
Anisotropie-Energie für
die magnetische Steuerung der Umorientierung der martensitischen
Zwillingsgrenze erfüllen,
und sie haben den Effekt für
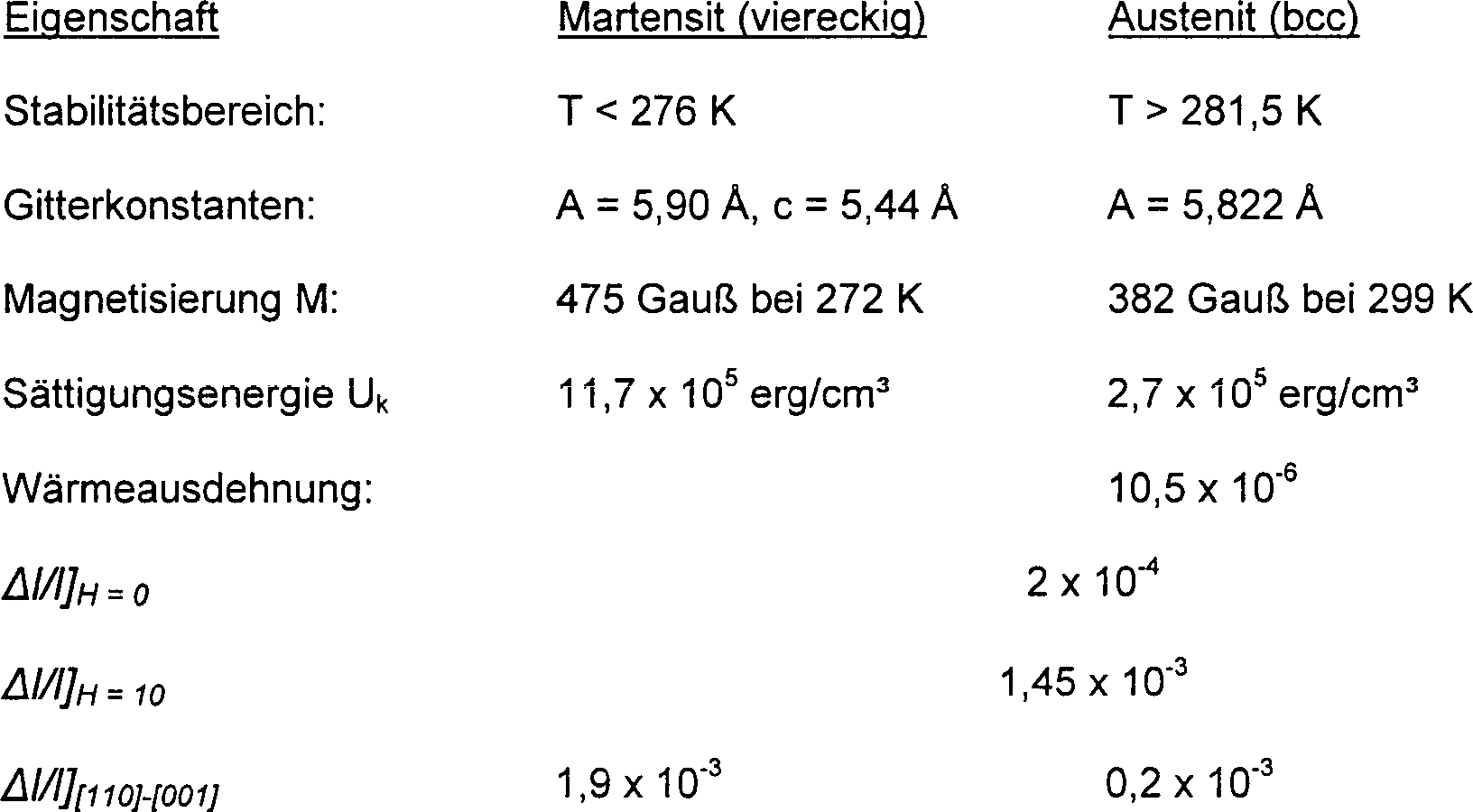
diesen Werkstoff nachgewiesen. Bei Ni2MnGa
handelt es sich um eine so genannte Heusler-Legierung mit kubischem
Kristallgitter L21 in der austenitischen
Hochtemperatur-Phase, bei welchem die Gitterkonstante a etwa 5,822 × 10–10 m
(5,822 Å)
beträgt.
Die Temperatur, bei welcher der Übergang
in den martensitischen Zustand bei diesem Werkstoff stattfindet,
beträgt
etwa 276 K, doch sie schwankt stark entsprechend den Veränderungen
in der Zusammensetzung um den stöchiometrischen
Wert von Ni2MnGa, wie nachstehend noch im
einzelnen erläutert
wird. Die martensitische Phase des Materials im Niedertemperaturbereich
ergibt sich aus der austenitischen Phase durch einen diffusionslosen Übergang
mit Verschiebung, der eine Viereck- bzw. Vierseit-Struktur erbringt,
wobei die martensitischen Gitterkonstanten hier mit a = b = 5,90 × 10–10 m
(5,90 Å,
c = 5,44 × 10–10 m
(5,44 Å)
und mit einer volumenbezogenen Zusammenziehung um 2,2% relativ zur
Phase L21 angegeben sind.
-
Eine
martensitische Phase von Ni2MnGa kann die
Spannung, die in Zusammenhang mit dem martensitischen Übergang
steht, bei der es sich um eine Veränderung um etwa –6,56% entlang
der Tetragon-Achse c handelt, durch eine von zwei möglichen
Reaktionen auffangen, und zwar durch Verrutschen oder durch Zwillingsbildung.
Es hat sich herausgestellt, dass die martensitische Phase von Ni2MnGa die Bildung von Zwillingsvarianten
begünstigt,
die sich in verträglichen
Ausrichtungen zusammenlagern, um so die Belastungsenergie auf ein
Minimum zu reduzieren. Dies ist eine besonders gut geeignete Bedingung
für die
Realisierung des Aufbaus großer
Belastungen im Werkstoff durch magnetisch gesteuerte Bewegung der
Zwillingsgrenze. Es wurde tatsächlich
erkannt, dass die Ausrich tung der Ni2MnGa-Zwillingsvariante
durch die Bewegung von Zwillingsgrenzen zu hohen makroskopischen
Belastungen bzw. Spannungen führen
kann; es wurde für
Ni2MnGa bei etwa 77 K berichtet, dass eine
in die Richtung [100] orientierte elastische Verformung von nur
etwa 2 MPa zu einer wieder einstellbaren Formänderung von etwa 5% Anlass
gibt.
-
Einzelkristall-Proben
aus Ni2MnGa, an denen eine Breite und Höhe von nur
einigen Millimetern und eine Länge
von etwa 6 mm gemessen wurde, wurden auf ihre Fähigkeit untersucht, die martensitischen
Zwillingsgrenzen des Werkstoffs magnetisch umzuorientieren. Die
Kristallausrichtung wurde durch Zurück-Reflexion der Brechung nach
Laue bestimmt. Daten zur Ermittlung der Magnetisierung als Funktion
des angelegten Magnetfeldes, die nachstehend als M-H-Kurven bezeichnet
werden, wurden unter Verwendung eines Proben-Schwing-Magnetometers
gewonnen, unter Anlegung eines Magnetfeldes, das entweder entlang
der Richtung [001] oder entlang der Richtung [110] der kubischen
austenitischen Phase in der Heusler-Struktur ausgerichtet war. Die
elastische Verformung wurde entlang der Richtung [001] unter Verwendung
eines Dehnungsmessgeräts
mit Metallfolie gemessen, das auf den Proben positioniert wurde,
und die Messung erfolgte als Funktion der Temperatur von etwa 250
K bis etwa 300 K und bei Magnetfeldern von bis zu etwa 7,95 × 106 (10 kOe), die entlang der Richtungen [001]
und [110] angelegt wurden.
-
5 stellt
eine graphische Darstellung der experimentellen M-H-Kurven dar,
die bei der Probe aus kristallinem Ni2MnGa
bei einer Temperatur von etwa 299 K gemessen wurden, bei welcher
sich das Material in der ursprünglichen
austenitischen Phase befindet, und bei einer Temperatur von 265
K, bei der sich das Material in der martensitischen Phase befindet,
während
entlang der Richtung [001] ein Magnetfeld angelegt wurde. Es zeigte
sich, dass der Martensit-Übergang
in der Probe bei einer Temperatur von etwa 276 K zentriert war.
Es wurde erkannt, dass der Martensit-Übergang im Allgemeinen über einen
Temperaturbereich stattfindet, und nicht bei einem einzelnen Temperaturwert,
weshalb in diesem Zusammenhang der Begriff der martensitischen Phasenübergangs-Tempe ratur
so zu verstehen ist, dass er sich in etwa auf die Temperatur bezieht,
die in der Mitte dieses Bereichs liegt.
-
In
der Hochtemperatur-Phase zeigte sich, dass die Sättigungsmagnetisierung Ms bei der Probe aus Ni2MnGa
etwa 47 emu/g bzw. etwa 3,82 × 10–2 T
(382 Gauß)
beträgt
und bei etwa 7,95 × 108 A/m (1 kOe) die technische Sättigung
erreicht wurde. In der martensitischen Zwillingsphase im Niedertemperaturbereich
zeigte sich, dass die Sättigungsmagnetisierung
Ms etwa 58 emu/g bzw. etwa 4,75 × 10–2 T
(475 Gauß)
betrug und dass sich die Sättigung
als schwieriger erwies; die Energie, die zur Sättigung der martensitischen
Phase in der Richtung [001] erforderlich ist, wurde bei etwa 1,17 × 106 erg/cm3 ermittelt.
Die geringfügige
Scherung, die sich bei der Reaktion bei geringer Magnetisierung
links auf den Kurven zeigte, ist auf die Form der Probe zurückzuführen. Die
Unstetigkeiten im schrägen
Verlauf der martensitischen M-H-Kurve sind ähnlich den Unstetigkeiten,
die bei Tergenol-D® festgestellt wurden,
und können
in Beziehung zu der unterschiedlichen Reaktion der verschiedenen
Zwillingsvarianten auf das angelegte Feld gesetzt werden.
-
6 zeigt
eine graphische Darstellung der Veränderung der elastischen Verformung
entlang der Richtung [001] bei der Probe aus Ni2MnGa
als Funktion der Temperatur ohne Anlegung eines Magnetfelds und mit
Anlegung eines Magnetfelds von etwa 7,95 × 104 A/m
10 kOe), das entlang der Richtung [001] der Probe ausgerichtet war.
Die beiden Kurvengruppen sind aus Gründen der klareren Darstellung
relativ zu einander entlang der Spannungsachse eingezeichnet. Jede
Gruppe von Kurven umfasst eine Kurve für die Belastung, die unter
Erhöhung
der Temperatur gemessen wurde, was durch einen nach rechts gerichteten
Pfeil angedeutet ist, sowie eine Kurve für die Belastung, die unter
Verringerung der Temperatur gemessen wurde, was durch einen nach
links weisenden Pfeil angegeben ist. Es wurde festgestellt, dass
der Schrägverlauf
im Hintergrund im Hochtemperaturbereich der Kurven des angelegten
Feldes von Null, der etwa 10,5 × 10–6/K
betrug, auf die Wärmeausdehnung
der Probe zurückzuführen ist.
-
Bei
einem angelegten Null-Feld wurde festgestellt, dass bei Verringerung
der Temperatur der Probe der Übergang
erster Ordnung in dem Material in die martensitische Phase bei etwa
276 K eintritt, und dass bei Erhöhung
der Temperatur die Rückkehr
aus der martensitischen Phase in die austenitische Phase bei etwa 281,5
K eintritt. Es zeigte sich, dass die elastische Verformung bei der
Temperatur des Phasenübergangs
in die martensitische Phase in einem Null-Feld – ΔI/I]H=0 – in der
Größenordnung
von etwa 2 × 10–4 liegt.
Dies entspricht nur einem kleinen Bruchteil der Veränderung
der Gitterkonstante c, wobei Δc/c
etwa 6,56% beträgt, was
auf die Aufnahme der elastischen Verformung durch die unterschiedlichen
Ausrichtungen der Zwillingsvariante ohne Anlegung eines Magnetfelds
zurückzuführen ist.
-
Es
wurde festgestellt, dass die Anlegung eines Magnetfelds mit einer
Stärke
von etwa 7,95 × 109 A/m (10 kOe) die Phasenübergangs-Temperaturen beim Übergang
vom martensitischen in den austenitischen Zustand unter die Temperaturen
des Materials ohne Anlegung eines Feldes drückt; wenn die Temperatur gesenkt wurde,
wurde eine Phasenübergangs-Temperatur
für den
martensitischen Übergang
bei etwa 273 K festgestellt. Die elastische Verformung bei der Phasenübergangs-Temperatur
im angelegten Feld ΔI/I]H=10 lag nach den Messungen in der Größenordnung
von etwa 1,45 × 10–3.
Der Unterschied zwischen der gemessenen elastischen Phasenübergangs-Verformung
ohne Anlegung eines Feldes und bei Anlegung eines Feldes von 7,95 × 109 A/m (10 kOe) betrug etwa 1,25 × 10–3.
Die verstärkte
elastische Phasenübergangs-Verformung,
die sich bei angelegtem Feld zeigte, entspricht quantitativ der
Verformung bei der Umorientierung der Zwillingsstruktur bei der
Reaktion auf das angelegte Feld, und bestätigt die Fähigkeit zur magnetischen Steuerung
der Zwillings-Umorientierung mit dem Feld.
-
Beispiel 2
-
Die
kristalline Probe aus Ni2MnGa aus Beispiel
1 wurde einem Magnetfeld mit zwei unterschiedlichen Ausrichtungen
und bei zwei verschiedenen Temperaturen ausgesetzt. 7A zeigt
die Versuchsanordnung für
die erste Ausrichtung des Magnetfelds. Hier wurde die Probe 40 zu
den Richtungen [001] und [110] in der dargestellten Weise ausgerichtet,
wobei auf die Probe ein Dehnungsmessgerät 42 aufgesetzt wurde,
wie dies dargestellt ist, um die elastische Verformung in der Richtung
[001] zu messen. In diesem Fall wurde die Feldorientierung zur Richtung
[110] der Probe ausgerichtet und somit maß das Dehnungsmessgerät 42 die
Belastung, die als eI angegeben ist, senkrecht
zum angelegten Feld. Bei dem Versuchsaufbau für die zweite Orientierung des
Magnetfelds, wie er in 7B dargestellt ist, wurde die
Probe 40 wieder zu den Richtungen [001] und [110] in der
dargestellten Weise ausgerichtet, wobei das Dehnungsmessgerät 42 in
der dargestellten Weise aufgesetzt war. Hier wurde die Feldorientierung
zur Richtung [001] der Probe ausgerichtet und damit maß das Dehnungsmessgerät die als
eII bezeichnete elastische Verformung parallel
zum angelegten Feld.
-
7C ist
eine graphische Darstellung der elastischen Verformung als Funktion
des angelegten Magnetfelds für
die beiden Feldausrichtungen bei einer Probentemperatur von etwa
283 K, die über
der Phasenübergangs-Temperatur
der Probe beim Übergang
in den martensitischen Zustand liegt. Es sind zwei Gruppen von Kurven
dargestellt, und zwar je eine Gruppe für jede Feldorientierung, wobei
jede Gruppe eine Kurve für das
zunehmende Feld und eine Kurve für
das abnehmende Feld umfasst. Man kann davon ausgehen, dass die elastische
Verformung bei einer Temperatur von 283 K aus der Magnetostriktion
der ursprünglichen
Heusler-Legierung zusammen mit der elastischen Verformung resultiert,
die auf jegliche Zwillingsgrenze zurückzuführen ist, die in der martensitischen
Phase verbleibt, die bei dieser Temperatur keinen Übergang
in die austenitische Phase vollzogen hat. Auf der Grundlage des
quantitativen Unterschieds in der elastischen Verformung bei Sättigung
für die
beiden Feldausrichtungen, die etwa –0,20 × 10–3 beträgt, wurde
festgestellt, dass die Magnetostriktion λs etwa –133 × 10–6 beträgt. Ein ähnliches
magnetostriktives Verhalten wurde bei Zimmertemperatur beobachtet.
-
7D zeigt
eine graphische Darstellung der elastischen Verformung als Funktion
des angelegten Magnetfeldes für
die beiden Feldorientierungen bei einer Probentemperatur von etwa
265 K. In diesem Fall wurde die Probe zunächst von Zimmertemperatur auf
etwa 265 K heruntergekühlt,
ohne dass ein Magnetfeld vorhanden war, was zur Bildung von martensitischen
Zwillingen ohne bevorzugte Orientierung führte. Im Falle einer Feldausrichtung
in der Richtung [001] führte
die nächste
Anlegung eines Magnetfeldes von etwa 7,95 × 109 A/m
(10 kOe) zu einer Zusammenziehung des Materials um etwa ganze 1,3 × 10–3.
Diese elastische Verformung liegt in etwa bei einer Größenordnung,
die größer ist
als jene, die im Falle einer Magnetostriktion bei 283 K beobachtet
wurde. Dieser Teil der Belastung, der nach Zurücknahme des Feldes auf Null
verbleibt, ist in der graphischen Darstellung als Lb ausgewiesen.
Der wieder herstellbare Teil dieser elastischen Verformung beträgt etwa
1 × 10–3.
-
Bei
der Feldausrichtung [110] wurde die Probe zuerst auf Zimmertemperatur
erwärmt
und dann zurück auf
265 K heruntergekühlt,
um die Zwillingsstruktur mit bevorzugter Orientierung zu entfernen,
die in der graphischen Darstellung als Lb angegeben
ist und die durch die vorhergehende Anlegung einer Feldausrichtung [001]
erzeugt wurde. Dies führte
zu einer Ausdehnung der Probe in der Richtung [001]. Aus der Graphik
wird deutlich, dass die Veränderungen
der elastischen Verformung bei 265 K in Verbindung mit der Drehung
eines Feldes von 7,95 × 109 (10 kOe) aus der Richtung [001] in die
Richtung [110] etwa 0,19% betragen, bei einer Belastungsempfindlichkeit
gegenüber
der angelegten Feldstärke,
die etwa 7,95 × 103 A/m (2 × 10–7/Oe)
beträgt.
-
Diese
Messung weist quantitativ nach, dass eine elastische Verformung
von etwa 0,2% in der Probe realisiert werden kann, sofern ein Magnetfeld
mit einer Stärke
von etwa 6,37 × 109 A/m (8 kOe) bis 7,95 × 109 (10
kOe) aus der Richtung [001] des Aktorenmaterials in die Richtung
[110] des Aktorenmaterials oder umgekehrt gedreht wird. Eine noch
stärkere
elastische Verformung ließe
sich beobachten, wenn das Aktorenmaterial aus einer kleinen Zahl
Zwillingsvarianten bestehen sollte; und gemäß der Erfindung wird bevorzugt,
dass das Aktorenmaterial weniger als 5 Varianten aufweist, während höchstens
ein bis zwei Varianten noch stärker bevorzugt
werden.
-
Die
gemessenen Belastungen, die bei diesem Versuch durch die Magnetfelder
in dem Martensitmaterial herbeigeführt werden, werden auf die
Umorientierung der martensitischen Zwillingsstruktur zurückgewiesen.
Dies deckt sich mit der Beobachtung, dass die Zusammenziehung des
Materials insgesamt um etwa 1,3 × 10–3,
die durch das Anlegen eines Feldes bei etwa 256 K in der Richtung
[001] in enger Übereinstimmung mit
der quantitativen Belastungsmessung von 1,25 × 10–3 steht,
die vorstehend mit der Umorientierung der Zwillingsstruktur während des Übergangs
in den martensitischen Zustand in Verbindung gebracht wurde. Es wurde
beobachtet, dass die zurückbleibende
Belastung, die in der Graphik als La angegeben
ist, größer ist, wenn
der Messung die Anlegung des Magnetfelds in der Richtung [110] vorausging.
-
Die
Daten weisen überzeugend
nach, dass die durch ein Magnetfeld gesteuerte elastische Verformung
in der Richtung [110], die bei der Probe aus Ni2MnGa
in der martensitischen Phase experimentell gemessen wurde, auf eine
Zwillings-Umorientierung
zurückzuführen ist
und nicht auf eine Verschiebung in der martensitischen Anfangstemperatur,
wie behauptet werden könnte.
Die Graphik in 6 ist ein Hinweis darauf, dass
die Übergangstemperatur
beim Übergang
in die martensitische Phase nach Anlegung eines Feldes von etwa
7,95 × 109 A/m (10 kOe) um etwa 2 K gesenkt wird.
Es stünde
zu erwarten, dass eine Messung der elastischen Verformung innerhalb
des Bereichs von zwei Grad unter der erwarteten Übergangstemperatur beim Übergang
in den martensitischen Zustand bei 276 K zu einer positiven elastischen
Verformung in der Richtung [001] führen müsste, wenn in der martensitischen
Phase ein Null-Feld angelegt wird, wie dies in der Graphik dargestellt
ist. Doch ist in starkem Unterschied hierzu gemäß der Darstellung in der Graphik
in 7D die gemessene elastische Verformung negativ
und nicht positiv. Außerdem
wurden die in 7D graphisch eingetragenen Messungen
bei einer Temperatur von etwa 265 K vorgenommen, was deutlich außerhalb
des Bereichs der Verschiebung der Übergangstemperatur beim Übergang
in den martensitischen Zustand ist. Dies ist ein deutlicher Hinweis
darauf, dass genau die magnetische Steuerung der Zwillinge mehr
Magnetisierungsvektoren und mehr Zwillingsvarianten in Ausrichtung
zum angelegten Feld bringt, das für die elastische Verformung
verantwortlich ist.
-
In
der nachfolgenden Tabelle I werden die Eigenschaften der im Versuch
eingesetzten Proben aus Ni2MnGa zusammengefasst,
wobei sich die Eigenschaft ΔI/I]H auf die Veränderung der elastischen Verformung in
der Richtung [001] nach Absenkung der Temperatur über die Übergangstemperatur
beim Übergang
in den martensitischen Zustand bezieht. Die Eigenschaft ΔI/I][110]-[001] bezieht sich auf den Unterschied
in der elastischen Verformung in der Richtung [001] bei Feldern,
die entlang der Achsen [001] und [110] ausgerichtet sind.
-
-
Die
Energie, die nötig
ist, um die Zwillingsgrenzen zu bewegen, wurde für die Probe aus Ni2MnGa hochgerechnet.
Anhand der Magnetisierungsschleifen in der martensitischen Phase
lässt sich
feststellen, dass bei den Varianten des Materials mit ungünstiger
Ausrichtung eine Dichte in der magnetischen Anisotropie-Energie
MH/2 von etwa 1,17 × 106 erg/cm3 bzw. etwa
17% von σe/2
zur Verfügung
steht, um die Bewegung der Zwillingsgrenze anzusteuern. Aus den
gerade beschriebenen quantitativen Ergebnissen wird deshalb deutlich, dass
sogar eine stärkere elastische
Verformung als der gemessenen elastischen Verformung in der martensitischen
Phase zum Ansteuern eines Aktorenhubs zur Verfügung steht. Wie nachstehend
noch erläutert
wird, wurde erkannt, dass eine Vorbelastung der Probe, zum Beispiel
durch mechanische Vorspannung der Probe, eine erhöhte Reaktion
auf eine elastische Verformung ermöglichen kann.
-
8 stellt
eine Graphik der resultierenden elastischen Verformung bei einer
Probe aus Ni2MnGa als Funktion der Belastung
bzw. der Kraft dar, welche in der Probe bei einer Probengröße von etwa
1 cm × 1
cm × 1,8
cm aufgebaut wurde. Ebenso sind die Spannungs-Dehnungs-Kurven für das piezoelektrische
Aktorenmaterial PZT und das magnetostriktive Aktorenmaterial Tertenol-D® dargestellt,
die beide aus Standardtexten entnommen wurde. Die elastische Verformung
bei Null-Kraft wird hier als freie oder unbeschränkte Verformung bezeichnet;
die elastische Verformung bei Null-Spannung wird als Verformung
unter Belastung bezeichnet. Von einem Werkstoff kann im Allgemeinen
erwartet werden, dass er entlang der Linie zwischen diesen Grenzen
eingesetzt werden kann. Diese Graphik veranschaulicht, dass das
Leistungsverhalten der Probe aus Ni2MnGa
die Leistung des piezoelektrischen Materials übersteigt und der Leistung
des magnetostriktiven Materials vergleichbar ist, allerdings ohne
die verschiedenen Nachteile, die im typischen Fall mit den magnetostriktiven
Werkstoffen verknüpft
sind.
-
Unter
Berücksichtigung
auch der Charakteristiken im Frequenzverhalten wurden Betätigungsversuche mit
Proben aus Ni2MnGa bei Anlegung eines magnetischen
Betätigungsfelds
mit verschiedenen vorgesehenen Frequenzen durchgeführt. Das
Frequenzverhalten erwies sich als sehr gut, sogar über 1 kHz.
Die entsprechende Dichte im Leistungsausgang wurde dann bei dem
Material bei über
1 kW/kg festgestellt.
-
Die
Erfinder haben erkannt, dass Aktorenmaterialien aus Einzelkristallen
wie die Probe aus Ni2MnGa in Einzelkristallform
für die
interessierenden Aktoren-Einsatzbereiche
nicht immer praktisch sind. Einzelkristall-Werkstoffe in der austenitischen
Phase können
schwierig und in der Herstellung kostspielig sein, und in termetallische
Einzelkristall-Zusammensetzungen, die sich erfindungsgemäß magnetisch
steuern lassen, sind leicht mechanisch spröde. Außerdem lassen sich Einzelkristall-Werkstoffe
nur über
einen relativ engen Bereich der Zusammensetzung herstellen, wodurch
die Fähigkeit
eingeschränkt
wird, die physikalischen Eigenschaften des Materials für eine bestimmte
Anwendung maßzuschneidern.
-
Die
Erfindung sieht Zusammensetzungen für polykristallines Aktorenmaterial
vor, zum Beispiel polykristalline NiMnGa-Zusammensetzungen, für welche
sich die magnetische Steuerung der Bewegung der Zwillingsgrenze
erzielen lässt
und mit welchen die Einschränkungen überwunden
werden, die für
ein Einzelkristall-Aktorenmaterial
gelten. Für
den quantitativen Nachweis solcher Werkstoffe wurde das polykristalline
NiMnGa-System experimentell untersucht. Die polykristallinen NiMnGa-Zusammensetzungen
wurden unter Heranziehung mehrerer Techniken hergestellt. Bei einem
ersten Verfahrensbeispiel wurden die gewünschten Bestandteile in Elementform
zusammen in Quarzröhrchen
unter einer Edelgas-Atmosphäre
im Induktionsverfahren zusammen schmelzflüssig gemacht, um kleine Legierungsplättchen bzw.
-kügelchen
mit dem Durchmesser des Röhrchens
zu erzeugen. In einem zweiten Prozess wurden die als Bestandteil
vorgesehenen Elemente in einem Schmelzgefäß in einem Vakuum-Ofen geschmolzen.
Alternativ wurde eine Säule
aus geschmolzenem Metall unter Heranziehung bekannter Saug-Gieß-Techniken
durch ein hohles Quarzröhrchen
gezogen. Mit diesem Verfahren wird der Schrumpfhohlraum beseitigt,
der eine typische Begleiterscheinung bei der Abkühlung eines festgelegten Volumens
an Metallschmelze ist; hier lässt
sich weiteres geschmolzenes Material aus der Schmelze in das hohle
Röhrchen
hochziehen, um jeglichen Schrumpfhohlraum zu füllen, der sich gegebenenfalls
beim Abkühlen
der Säule
bildet, und dann von oben nach unten verfestigen.
-
Beispiel 3
-
Ein
großer
Bereich in der Zusammensetzung der polykristallinen Proben aus NiMnGa
wurde mit den gerade beschriebenen Verfahrensweisen hergestellt.
Es wurde festgestellt, dass die Proben mechanisch stark sind, insbesondere
in ihrer Verbindung mit Einzelkristall-Proben aus NiMnGa. Jede Zusammensetzung
wurde hinsichtlich ihrer Curie-Temperatur Tc,
ihrer Phasenübergangs-Temperatur
beim Übergang
in die martensitische Phase, die hier als Tmart bezeichnet
wird, und ihrer Sättigungsmagnetisierung
Ms charakterisiert. Diese drei Charakteristika
sind jeweils auf graphischen Darstellungen der Zusammensetzung in
Dreiecksform in den 9, 10 bzw. 11 aufgetragen,
und zwar für
den untersuchten Bereich der Zusammensetzungen der Proben. Dabei
ist zu beachten, dass der auf jeder großen Graphik dargestellte Bereich
der Zusammensetzung ein Teildiagramm eines kompletten Diagramms
der Zusammensetzung darstellt, wie dies durch das eingefügte Diagramm
angezeigt wird. In jeder Teilgraphik in großem Maßstab ist ein Bereich der Zusammensetzung
mit Nickel von 40% bis 60% dargestellt, ebenso ein Bereich der Zusammensetzung
mit Ga zwischen 15% und 35% und ein Bereich der Zusammensetzung
mit Mn, der zwischen 25% und 45% liegt.
-
Um
eine optimale NiMnGa-Zusammensetzung zu ermitteln, wird zunächst die
Curie-Temperatur der Zusammensetzungen berücksichtigt, wobei auf die graphische
Darstellung in 9 Bezug genommen wurde. Diese
Figur gibt die Koordinaten der Zusammensetzung für jede der untersuchten Zusammensetzungen
an und kennzeichnet jeden Punkt mit der Curie-Temperatur Tc in °C
für die
jeweilige Zusammensetzung. Die Umrisslinien der Konstante Tc werden auf der Graphik eingetragen, um
Bereiche in der Graphik kenntlich zu machen, in denen die Curie-Temperatur
verschiedene Werte aufweist. Ganz allgemein muss die Temperatur,
bei welcher das Material magnetisch betätigt werden soll, niedriger
sein als die charakteristische Curie-Temperatur des Materials, um
so sicherzustellen, dass die Bewegung der Zwillingsgrenze in der
martensitischen Phase umso einfacher wird, je stärker die Magnetisierung ist;
deshalb wurde festgestellt, dass die Bewegung der Zwillingsgrenze
zunehmend einfacher wird, je weiter bei Magnetsystemen, die eine
hohe magnetisch-kristalline Anisotropie-Energie aufweisen, die Betriebstemperatur
unter die Curie-Temperatur abgesenkt wird. Des Weiteren erfährt die
Dichte der Anisotropie-Energie bekanntlich einen deutlichen Anstieg,
wenn die Temperatur unter die Curie-Temperatur abgesenkt wird. Es
zeigte sich, dass alle Proben – mit
Ausnahme von zweien – durch eine
Curie-Temperatur cha rakterisiert werden, die viel höher als
0°C ist
und die außerdem
bei oder über
der Zimmertemperatur liegt. Aus der Graphik ist weiterhin ersichtlich,
dass ein Nickelgehalt von weniger als etwa 52% bevorzugt werden
kann und ein Ga-Gehalt von mehr als etwa 17% und weniger als etwa
26% vorgezogen werden kann, um eine Curie-Temperatur über der
Raumtemperatur sicherzustellen.
-
Die
Phasenübergangs-Temperatur
Tmart für
den Übergang
in die martensitische Phase, die bei den Proben gemessen wurde,
ist in Grad Celsius in 10 graphisch als Funktion der
Zusammensetzung in der gleichen Weise wie die Graphik der Curie-Temperatur
in 9 aufgetragen. Ebenso sind die Umrisslinien der Konstanten
Tmart dargestellt, um die Bereiche in der
Graphik zu identifizieren, die verschiedene Übergangstemperaturen beim Phasenübergang
in den martensitischen Zustand aufweisen. Wie vorstehend bereits
erläutert, ist
die Phasenübergangs-Temperatur
beim Übergang
in den martensitischen Zustand hier so zu verstehen, dass sie sich
in etwa auf die Temperatur bezieht, die in der Mitte des Bereichs
der charakteristischen Temperaturen liegt, bei welchen sich die
martensitische Phase des Materials zu zeigen beginnt, wenn das Material von
höheren
Temperaturen aus heruntergekühlt
wird. Diese Phasenübergangs-Temperatur
lässt sich
durch Wärmemessungen
erfassen, zum Beispiel durch differentielle Wärmemengenmessung durch Abtastung
oder mittels thermischer Differential-Analyse, ebenso durch Messungen der
elastischen Verformung oder der Magnetisierung, die in Abhängigkeit
von der Temperatur vorgenommen wurden, um die Veränderungen
in der Gitterkonstante oder der Magnetisierung zu erfassen, die
im typischen Fall bekanntlich auftritt, wenn das Material durch
die Phasenübergangs-Temperatur
beim Übergang
in den martensitischen Zustand heruntergekühlt wird. Da beim Übergang
in den martensitischen Zustand beim NiMnGa-System nur eine geringfügige Wärme-Hysterese
vorliegt, wurde festgestellt, dass die Phasenübergangs-Temperatur beim Übergang
in den martensitischen Zustand nahe bei der Temperatur T0 liegt, bei welcher die Energien in der
austenitischen und martensitischen Phase gleich sind. Die thermoelastische
oder thermomagnetische Hysterese, die mit dem Phasenübergang
verknüpft
ist, hat im Allgemeinen ihre Mitte um T0.
-
Wie
vorstehend erläutert,
kann eine magnetische Steuerung der martensitischen Zwillingsvarianten nur
bei Zusammensetzungen erreicht werden, bei denen die martensitische
Phase vorhanden ist. Vorzugsweise zeichnet sich das Aktorenmaterial
aus NiMnGa durch die Anwesenheit der martensitischen Phase bei Temperaturen über dem
Gefrierpunkt von Wasser bei 0°C
aus und liegt in noch stärker
bevorzugter Weise nahe bei Zimmertemperatur, also bei 19°C oder darüber. Es
wird nun auf die Graphik in 10 Bezug
genommen, anhand derer festgestellt wird, dass Zusammensetzungen
mit einem Ga-Gehalt von mehr als rund 18% und weniger als etwa 26%,
Zusammensetzungen mit einem Ni-Gehalt von mehr als etwa 45% und
weniger als rund 52% und Zusammensetzungen mit einem Mn-Gehalt von
mehr als etwa 24% und weniger als ca. 35% alle ein polykristallines
Aktorenmaterial ergeben, das über
dem Gefrierpunkt von Wasser arbeiten kann, wobei viele Zusammensetzungen
bei Zimmertemperatur oder darüber
einsatzfähig
sind.
-
Es
wird festgestellt, dass die Phasenübergangs-Temperatur beim Übergang
in die martensitische Phase gegenüber dem Spannungszustand des
Materials sehr empfindlich ist und somit steht zu erwarten, das
sich die hier angegebenen Werte in Entsprechung zur Bearbeitung
einer bestimmten Probe und zur verbleibenden elastischen Verformung
verändern.
Somit wird erkennbar, dass Legierungen außerhalb des vorzuziehenden Bereichs,
der hier definiert wurde, ebenfalls eine Phasenübergangs-Temperatur für den Übergang
in den martensitischen Zustand zeigen, welche die Legierung für Einsatzbereiche
bei oder über
der Zimmertemperatur geeignet macht.
-
Die
Erfinder dieser Anmeldung haben anhand der Analyse der Curie-Temperatur
und der Phasenübergangs-Temperatur
beim Übergang
in die martensitische Phase drei polykristalline NiMnGa-Zusammensetzungen
erkannt, die sich besonders gut als Aktorenmaterial gemäß der vorliegenden
Erfindung eignen. Die erste – Ni45,6Mn34,1Ga19,3 – zeichnet
sich durch eine Curie-Temperatur bei etwa 70°C und eine Phasenübergangs-Temperatur
für den Übergang
in die martensitische Phase von etwa 43°C aus, die beide deutlich über der
Zimmertemperatur liegen. Die zweite gut geeignete Zusammensetzung – Ni18,6Mn32,4Ga19 – zeichnet
sich durch eine Curie-Temperatur von etwa 51°C und eine Phasenübergangs-Temperatur
für den Übergang
in den martensitischen Zustand bei etwa 29°C aus. Für die dritte gut geeignete
Zusammensetzung – Ni50,2Mn29,8Ga20 – sind
eine Curie-Temperatur
von etwa 53°C
und eine Phasenübergangs-Temperatur
beim Übergang
in den martensitischen Zustand bei rund 29°C charakteristisch. Es wird
deutlich, dass eine gewisse Berücksichtigung für die Toleranz
bei den Messtechniken in angemessener Weise zulässig sein sollte und somit
können
die für jede
der drei hier aufgeführten
Zusammensetzungen angegebenen atomaren Fraktionen der Zusammensetzung
als Mittelpunkte der Bereiche betrachtet werden, die zu beiden Seiten
des Mittelpunkts mehrere Prozentpunkte überspannen.
-
11 zeigt
eine Graphik für
die gemessene Sättigungsmagnetisierung
Ms in emu/g für die als Probe verwendeten
Zusammensetzungen, die für
jeden Koordinatenverbindungspunkt bei jeder Zusammensetzung in der
gleichen Weise wie in den Graphiken nach 9 und 10 eingezeichnet
ist. Die Umrisslinien der Konstante Ms sind
ebenfalls in der gleichen Weise dargestellt. Neben den Faktoren
der Curie-Temperatur und der Phasenübergangs-Temperatur beim Übergang
in die martensitische Phase ist bei der Grenze der hohen Anisotropie
eine vergleichsweise stärkere
Magnetisierung gegenüber
einer relativ geringeren Magnetisierung bei magnetisch gesteuertem
Aktorenmaterial vorzuziehen; eine starke Magnetisierung führt zu einem
größeren Druck
auf günstig
orientierte Zwillingsgrenzen bei Anlegung eines Magnetfeldes und
führt dadurch
zu einer stärkeren
Reaktion in der Aktorenfunktion. Diejenigen Proben, die eine vergleichsweise
stärkere
Magnetisierung besitzen, finden sich in einem Bereich der graphischen
Darstellung der Zusammensetzung, der eng auf den Bereich der graphischen
Darstellung der Curie-Temperatur ausgerichtet ist, der eine vergleichsweise
hohe Curie-Temperatur zeigt. Die vergleichsweise geringe Magnetisierung
von Proben, deren Zusammensetzung in der Graphik oben links eingetragen
ist, kann ein Hinweis darauf sein, dass die Curie-Temperatur unter
der gemessenen Magnetisierungstemperatur lag.
-
Berücksichtigt
man die drei besonders gut geeigneten Zusammensetzungen, die vorstehend
grob umrissen sind, stellt man fest, dass die Zusammensetzung mit
der stärksten
Magnetisierung, für
die auch eine Curie-Temperatur und eine Phasenübergangs-Temperatur beim Übergang
in den martensitischen Zustand charakteristisch sind, die beide über Zimmertemperatur
liegen, die Zusammensetzung Ni50,2Mn29,8Ga20 ist. Diese
Zusammensetzung zeichnet sich durch eine Magnetisierung von etwa
48 emu/g aus. Bei vielen Einsatzgebieten bei Raumtemperatur hat
sich diese Zusammensetzung als besonders gut geeignet erwiesen.
-
Ganz
allgemein kann man gemäß der vorliegenden
Erfindung eine geeignete NiMnGa-Zusammensetzung unter Heranziehung
der graphischen Darstellungen in 9, 10 und 11 auswählen, um
in Frage kommende Zusammensetzungen zu ermitteln, welche den betrieblichen
Anforderungen des jeweiligen Aktorenmaterials entsprechen. Wenn
zum Beispiel einem Betriebseinsatz bei oder über Zimmertemperatur nicht besonders
Augenmerk gilt, dann eignet sich die Zusammensetzung Ni50Mn28Ga22 wegen seiner
hohen Magnetisierung von etwa 50 emu/g besonders gut. Ist ein Betriebseinsatz
bei hoher Temperatur erforderlich, dann eignen sich die vorstehend
beschriebenen Zusammensetzungen Ni48,6Mn32,4Ga19 besonders
gut. Es ist gut einsehbar, dass ähnliche
Analysen vorgenommen werden können,
um die optimale Zusammensetzung für andere Betriebsanforderungen
zu finden, die durch eine bestimmte Anwendung gegeben sind.
-
Für einige
Anwendungsbereiche ist eine polykristalline Legierung der stöchiometrischen
Zusammensetzung Ni50Mn25Ga25 vorzuziehen, während jede der verschiedenen
polykristallinen Legierungszusammensetzungen, die bei diesem Beispiel
beschrieben wurden, als für
verschiedene Einsatzbereiche vorzuziehen ermittelt wird. Ganz allgemein
haben die Erfinder dieser Anmeldung entdeckt, dass die polykristallinen
Legierungen, die durch die Zusammensetzung Ni65–x–yMn20+xGa15+y definiert
werden, wobei x zwischen ca. 3 Atom-% liegt und etwa 14 Atom-% liegt
und y einen Wert von rund 3 Atom-% bis rund 12 Atom-% hat, einen
Bereich der betrieblichen Eignung bieten, die sich gut für eine breite
Palette von Einsatzmöglichkeiten
des Aktorenmaterials eignen.
-
Beispiel 4
-
Zu
einer weiteren experimentellen Analyse der Proben aus polykristallinem
NiMnGa wurde die freie elastische Verformung an der Legierungszusammensetzung
Ni50Mn28Ga22 als Funktion der Temperatur gemessen,
d. h. e0(T), sowohl ohne Anlegen eines Magnetfelds
als auch bei Anlegen eines Magnetfelds von rund 7,95 × 109 A/m (10 kOe). Die gemessene Veränderung
der elastischen Verformung als Funktion des angelegten Feldes ist
in der graphischen Darstellung in 12 dargestellt.
Das Feld wurde mit einer Ausrichtung parallel zur Orientierung des
Dehnungsmessgeräts
angelegt, das auf die Probe aufgesetzt wurde. Ebenso ist auf den
eingefügten
graphischen Darstellungen in der Figur die Feldabhängigkeit
der elastischen Verformung unter und über der Phasenübergangs-Temperatur
beim Übergang
in die martensitische Phase eingezeichnet. Die Magnetisierung der
Probe in Abhängigkeit
von der Temperatur – M(T) – ist für ein Feld
von etwa 3,98 × 108 A/m (500 Oe) ebenfalls in der Figur eingetragen.
-
Dabei
ist zu beachten, dass im Vergleich zur austenitischen Phase in der
martensitischen Phase insgesamt ein Anstieg in der elastischen Verformung
festgestellt wird. Außerdem
zeigte sich in der durch das Feld induzierten elastischen Verformung
eine Spitze bei Annäherung
von niedrigeren Temperaturen aus an die Phasenübergangs-Temperatur beim Übergang
in den martensitischen Zustand.
-
Beispiel 5
-
Zur
weiteren Charakterisierung der magnetischen Eigenschaften der Proben
aus polykristallinen Legierungen wurde die Schwankung der Magnetisierung
in Abhängigkeit
von der Temperatur an einer Probe einer polykristallinen Legierung
mit der Zusammensetzung Ni50,2Mn29,8Ga20 gemessen.
Die gemessene Veränderung
bei dieser Probe ist gegenüber
der Temperatur in 13 für verschiedene Stärken des
angelegten Feldes aufgetragen. Es hat sich gezeigt, dass bei dieser
Probe unterhalb der Curie-Temperatur und insbesondere unter etwa
310 K die Magnetisierung eine starke anomale Feldabhängigkeit
zeigt. Diese Abhängigkeit
liefert den indirekten experimentellen Beweis dafür, dass
stark feldabhängige Spannungen
in der Legierung aufgebaut werden können und dass dementsprechend
mit der Legierung eine starke magnetische Steuerung der Aktorenfunktion
erzielt werden kann.
-
Unter
Berücksichtigung
des Bereichs der Zusammensetzungen und der Betriebs-Kennwerte der
beim vorstehenden Beispiel beschriebenen polykristallinen Legierungen
haben die Erfinder des Weiteren entdeckt, dass sich verschiedene
zusätzliche
Substitutionen in der Zusammensetzung vornehmen lassen, um eine
polykristalline Legierung zu bilden, die einen gewünschten
Satz an Betriebs-Kennwerten
besitzt. Bei einem ersten solchen Beispiel wird bei der allgemeinen
Zusammensetzung Ni65–x–yMn20+xGa15+y, wobei x zwischen ca. 3 Atom-% und etwa
14 Atom-% beträgt
und y einen Wert von ca. 3 Atom-% bis etwa 12 Atom-% hat, die Nickel-Komponente
durch eine Komponente (NiaFebCoc)65–x–y ersetzt, bei welcher
a + b + c = 1 ist, b zwischen etwa Null und ca. 0,6 liegt und c
einen Wert zwischen ca. Null und rund 0,6 hat, um die Legierung
(NiaFebCoc)65–x–yMn20+xGa15+y zu bilden. Es hat sich gezeigt, dass
der Zusatz von Eisen und Kobalt zu der Legierung sowohl die Curie-Temperatur
der Legierung als auch die Magnetisierung der Legierung erhöht.
-
In
gleicher Weise kann bei der allgemeinen Zusammensetzung Ni65–x–yMn20+xGa15+y, wobei
x zwischen ca. 3 Atom-% und etwa 14 Atom-% beträgt und y einen Wert von ca.
3 Atom-% bis etwa 12 Atom-% hat, die Mn-Komponente durch eine Komponente
(MnaFebCoc)20+x ersetzt werden,
bei welcher a + b + c = 1 ist, b zwischen etwa Null und ca. 0,5
liegt und c einen Wert zwischen ca. Null und rund 0,2 hat, um die
Legierung Ni65–x–y(MnaFebCoc)20+xGa15+y zu bilden. Es hat sich gezeigt, dass
der Zusatz von Eisen und Kobalt zu der Legierung sowohl die Curie-Temperatur als auch
die Magnetisierung der Legierung erhöht.
-
Ebenso
kann bei der allgemeinen Zusammensetzung Ni65–x–yMn20+xGa15+y, wobei
x zwischen ca. 3 Atom-% und etwa 14 Atom-% beträgt und y einen Wert von ca.
3 Atom-% bis etwa 12 Atom-% hat, die Ga-Komponente durch eine Komponente
(GaaSibAlc)15+y ersetzt werden,
bei welcher a + b + c = 1 ist und b und c einen Wert zwischen ca.
Null und etwa 0,5 haben, um die Legierung Ni65–x–yMn20+x(GaaSibAlc)15+y zu
bilden. Die Zusätze
an Silizium und Aluminium lassen sich zur Optimierung der Curie-Temperatur
und der Phasenübergangstemperatur
beim Übergang
in den martensitischen Zustand wie auch der Magnetisierung, der
Steifigkeit, des Korrosionsverhaltens und anderer Eigenschaften
verändern,
die für
einen bestimmten Einsatzbereich von Interesse sind.
-
Anhand
dieser Diskussion wird deutlich, dass Legierungen der allgemeinen
Form (NiaFebCoc)65–x–y(MndFeeCof)20+x(GagSihAli)15+y, bei denen x zwischen etwa 3 Atom-%
und ca. 14 Atom-% liegt und y einen Wert von etwa 3 Atom-% bis ca.
12 Atom-% besitzt und wobei a + b + c = 1 ist, wobei d + e + f =
1 ist und g + h + i = 1 ist, gemäß der Erfindung
als magnetisch ansteuerbares Aktorenmaterial verwendet werden kann und
in angemessener Weise praktisch in polykristalliner Form in einer
Zusammensetzung hergestellt werden kann, die sich bei vernünftigen
Temperaturen betreiben lassen.
-
Die
Erfinder haben durch Versuche auch andere in Frage kommende magnetisch
ansteuerbare Werkstoffe analysiert, darunter das hcp-fcc-System ε CoMn mit
hoher Anisotropie innerhalb des Bereichs an Zusammensetzungen, in
dem der Übergang
in die martensitische Phase nahe der Zimmertemperatur oder über dieser
liegt; diesen Bereich findet man bei einem Mn-Gehalt, der zwischen
etwa 12% und rund 30% liegt. Es wurde festgestellt, dass die in
diesem System aufgebauten Spannungen geringer sind als bei dem NiMnGa-System.
Es wurde entdeckt, dass kleine Legierungszusätze, zum Beispiel ein Nickelzusatz,
zu der Legierung die elastische Verformung an der Zwillingsgrenze
verbessern kann, indem sie die fcc-Phasenbildung fördert und
dementsprechend den Übergang
in die martensitische Phase bei vergleichsweise geringeren Mn-Konzentrationen
unterstützt.
Solche Zusammensetzungen zeichnen sich durch eine stärkere Magnetisierung
aus, wodurch ein angelegtes Magnetfeld einen größeren Energieunterschied über die
martensitischen Zwillingsgrenzen erzeugen kann, wie vorstehend schon
erläutert
wurde. Dieser größere Energieunterschied neigt
seinerseits dazu, die Bewegung der Zwillingsgrenze, die durch ein
angelegtes Magnetfeld herbeigeführt wird,
zu vereinfachen. Die Eigenschaften des CoMn-Systems bei der magnetischen
Aktorenfunktion lassen sich gemäß der vorliegenden
Erfindung für
einen bestimmten Einsatzbereich durch den Zusatz von Cr, Pt, Pd, Au,
Nb oder ein anderes geeignetes Element maßschneidern, das vorzugsweise
in einem Anteil von bis zu etwa 10 Atom-% vorliegt. Außerdem haben
die Erfinder ganz allgemein erkannt, dass der Bereich der Legierungszusammensetzung
von CoaMnb – wobei
a zwischen etwa 60 und 90 liegt und b einen Wert zwischen etwa 10
und rund 40 hat – einen
Bereich für
die Aktorenmaterialien bildet, welche Betriebskennwerte aufweisen,
die sich für
einen bestimmen Einsatzbereich maßschneidern lassen.
-
Wie
sich aus den bisherigen Erläuterungen
erkennen lässt,
ist es möglich,
eine breite Palette von Legierungen zu konzipieren, um ein Aktorenmaterial
herzustellen, das die Eigenschaft der magnetischen Steuerung der
Zwillingsgrenze gemäß der Erfindung
besitzt. Die vorstehend dargestellten Werkstoffe sind nur Beispiele
und sollen keine Einschränkung
darstellen.
-
Bei
einem ausgewählten
erfindungsgemäßen Aktorenmaterial
haben die Erfinder dieser Anmeldung erkannt, dass die Größe und Form
des Aktorenmaterials einen Einfluss auf die verschiedenen Eigenschaften des
Materials im Betriebsverhalten nehmen kann. Wenn zum Beispiel ein
großer
Aktorenhub erwünscht
ist, sollte vorzugsweise ein vergleichsweise langes und dünnes Element
aus dem Aktorenmaterial verwendet werden. Wenn eine starke Kraft
beim Betätigungshub
erwünscht
ist, wird vorzugsweise für
das Aktorenelement eine Fläche
mit großem
Querschnitt konzipiert. Wenn umgekehrt eine Betätigung mit hoher Geschwindigkeit gewünscht wird,
wird ein dünneres
Element bevorzugt, um die Ausbildung von Wirbelströmen zu verringern, die
im Ansprechen auf ein angelegtes magnetisches Wechselfeld in dem
Material gebildet werden.
-
Es
wird deutlich, dass bei der Konzipierung der Form und der Größe des Aktorenelements
an den gewünschten
Leistungsmerkmalen Abstriche gemacht werden müssen. Wenn zum Beispiel ein
Aktorenelement für
große
Kraft und hohe Geschwindigkeit gewünscht wird, dann werden gemäß der Erfindung
vorzugsweise Laminatfolien aus dem Aktorenmaterial hergestellt,
die übereinander
gestapelt und durch Isolierlagen in herkömmlicher Weise voneinander
getrennt werden, so dass einerseits die Wirbelströme reduziert
werden, aber andererseits eine wirksame große Querschnittsfläche vorgesehen
wird. Die Kosten und die Komplexität des Herstellungsverfahrens
bei einer solchen Laminatstruktur der Aktoren müssen natürlich im Zusammenhang mit dem
Zugewinn an Leistungsverhalten betrachtet werden, der dadurch erzielt
wird. Wie daraus deutlich wird, ist es möglich, eine breite Palette
an rechteckförmigen,
stabförmigen
Formen, Formen als dünner
Film, als Partikel, Draht etc. des Aktorenmaterials zu verwenden,
und gemäß der Erfindung
wird es bevorzugt, dass die Art der mechanischen Verbindungen beim
jeweiligen Einsatzgebiet des Aktorenelements im Zusammenhang mit den
Kriterien des Leistungsverhaltens im Aktoreneinsatz berücksichtigt
werden, wenn eine optimale Form und eine optimale Größe des Aktorenmaterials
ermittelt werden.
-
Es
hat sich gezeigt, dass bei einem bestimmten Aktorenelement die Reaktion
auf magnetische Auslösung
durch mehrere verschiedene Verfahrensabläufe optimiert werden kann.
Im Betrieb wird über
die kurze Abmessung vorzugsweise ein statisches magnetisches Vorspannfeld
angelegt und wird über
eine andere Abmessung des Materials, d. h. senkrecht zum Vorspannfeld,
ein magnetisches Wechselfeld zur Betätigung angelegt. Vorzugsweise
wird vor Anlegung des Betätigungsfelds
das Aktorenelement mehrmals unter Anlegung des Vorspannfelds erwärmt und
abgekühlt.
Damit wird das Material unter Drehung der Varianten zur Ausrichtung
auf das Vorspannfeld vorbereitet; danach richtet sich eine zunehmende
Konzentration an c-Achsen in dem Material parallel zu dem Vorspannfeld
aus, wenn zusätzliche
Zyklen zur Erwärmung
und Abkühlung
vollständig
ausgeführt
werden.
-
Wenn
die Vorspann-Ausrichtung vor der Betätigung abgeschlossen ist, führt die
Anlegung eines magnetischen Betätigungsfelds
in einer Richtung senkrecht zum Vorspannfeld zu einer Drehung der
martensitischen Magnetisierungsvektoren und Zelleinheiten um 90° und resultiert
in einer Maximierung der elastischen Verformung der Zwillingsgrenze,
welche durch den Aktorenhub aufgebaut werden kann. Ganz allgemein
lässt sich
feststellen, dass mit dem Ziel, dass das Aktorenelement die stärkstmögliche Ausbildung
einer elastischen Verformung erhält,
ein statisches Vorspannfeld in einer ersten Richtung angelegt wird
und das Betä tigungsfeld in
einer zweiten Richtung angelegt wird, die so gewählt wird, dass der Dreheffekt
bei der Magnetisierung und die entsprechende Bewegung der Zwillingsgrenze
maximiert werden, die mit der Drehung der Magnetisierung einhergeht.
Bei einer bevorzugten Arbeitstechnik wird das magnetische Betätigungsfeld über die
längste
Abmessung des Elements aus Aktorenmaterial angelegt, um einen Hub
entlang dieser Abmessung herbeizuführen. Es wurde erkannt, dass
das Aktorenmaterial abwechselnd vorgespannt werden kann, z. B. durch
eine mechanische Vorspann-Ausbildung, um vor der Anlegung des magnetischen
Betätigungsfeldes
Varianten so auszurichten, dass sie eine größtmögliche Reaktion auf elastische
Verformungen in einem magnetischen Betätigungsfeld ausrichten.
-
Wie
sich daraus erkennen lässt,
kann das magnetische Vorspann- und Betätigungsfeld von verschiedenen
Feldquellen erzeugt werden, die innerhalb einer breiten Palette
liegen. Zum Beispiel kann das Vorspannfeld unter Verwendung eines
Dauermagneten oder eines Elektromagneten aufgebaut werden, wobei
das so erzeugte Betätigungsfeld
mit Wicklungen arbeitet, die um die entsprechende Abmessung des
Aktorenelements gewickelt sind, wobei diesem die gerade vorstehend
gegebene Erläuterung
der Ausrichtung zugrunde liegt. Wenn bei den untersuchten NiMnGa-Systemen
das Betätigungsfeld über die
kurze Abmessung des Aktorenelements angelegt wird, so zeigt sich
im Ansprechen auf das Feld eine Längendehnung des Elements, während das
Element sich im Ansprechen auf ein Feld, das quer zur langen Abmessung
des Betätigungselements
angelegt wird, zusammenzieht. Daraus lässt sich ablesen, dass somit
eine gewünschte
Richtung des Betätigungshubs
durch eine entsprechende Auswahl der Ausrichtung des angelegten
Feldes maßgeschneidert
werden kann.
-
Die
Eigenschaften der erfindungsgemäßen Aktorenmaterialien
bezüglich
starker elastischer Verformung, großer Kraft, hoher Geschwindigkeit
und Verschiebung mit großem
Hub richten sich in überlegener
Weise auf eine große
Palette von Einsatzbereichen für
die Aktorenfunktion. Die Aktorenmaterialien eignen sich gut für viele
Einsatzzwecke, die üblicherweise
unter Verwendung von Legierungen mit Formgedächtnis angesprochen werden,
worunter die Steuerung von Ventilen und Pumpen, die Steuerung der
Einspritzung von Fluiden und der Ab gabe von Fluiden und eine große Palette
von Einsatzbereichen fallen, bei denen eine hochpräzise Messwertwandlung
gefordert wird. Zum Beispiel können
die Aktorenmaterialien bei mikro-elektromechanischen Systemen eingesetzt
werden, zu denen Systeme zur Mikropositionierung, Robotersysteme
und Geräte und
Vorrichtungen in der Biomedizin und der Chirurgie gehören, wie
beispielsweise jene, bei denen eine präzise Steuerung erforderlich
ist.
-
Die
erfindungsgemäßen Aktorenmaterialien
eignen sich auch gut für
Systeme zur Schwingungskontrolle, z. B. bei einem System, bei welchem
der Aktor es ermöglicht,
dass eine Regelschleife mit negativer Rückmeldung Schwingungen bei
Maschinen oder an einem Maschinenteil ausgleicht. In ähnlicher
Weise können die
Aktorenmaterialien bei Systemen zur Oberflächenkontrolle eingesetzt werden,
wie beispielsweise Systemen, die zum Regeln und Kontrollieren der
Position einer Oberfläche
einer Tragfläche
verwendet werden, um so eine präzise
passende Auslegung für
Szenarien mit Nachlauf und Auftrieb zu erzielen. Systeme aus intelligenten
Materialien, die eine intelligente Reaktion auf ihre Umgebung herbeiführen können, werden
mit den Aktorenmaterialien ebenfalls gut abgedeckt; hierbei macht
das Material eine Messwertwandler-Reaktion mit hoher Geschwindigkeit
und hoher Präzision
auf einen erfassten Eingangsparameter möglich. Wie sich daraus ersehen
lässt,
können
mittels der magnetischen Ansteuerung der Aktorenmaterialien Veränderungen
bei einer komplizierten Form in der Weise herbeigeführt werden,
dass ein praktischer Einsatz solcher Aktoren, für welche sich herkömmliche
Aktorensysteme nicht problemlos eignen, hier erzielt werden kann.
-
In
diesen Ausführungen
werden nur einzelne unter den vielen verschiedenen Anwendungsgebieten hervorgehoben,
auf die sich die erfindungsgemäßen Aktorenmaterialien
beziehen. Jede Anwendung, für
welche ein Betätigungsmechanismus
mit vergleichsweise großem
Hub, mit hoher Geschwindigkeit und starker elastischer Verformung
bevorzugt wird, ist für
den Einsatz der Aktorenmaterialien gut geeignet. Selbstverständlich ist
es offensichtlich, dass der Fachmann gegebenenfalls verschiedene
Modifizierungen und Ergänzungen
an den vorstehend beschriebenen Ausführungsbeispielen des Aktorenmaterials
vornehmen kann, ohne dabei vom Umfang dieses Beitrags zu diesem
Fachgebiet abzuweichen, wie er durch den Gegenstand der Ansprüche definiert
wird.
-
Text für die Zeichnungen (in der Reihenfolge
der Zeichnungsblätter)
-
8
-
- FORCE = KRAFT
- SAMPLE SIZE = GRÖSSE
DER PROBE
- STRAIN = ELASTISCHE VERFORMUNG
- STRESS = BELASTUNG
-
6
-
- STRAIN = ELASTISCHE VERFORMUNG
- TEMPERATURE = TEMPERATUR
-
7C
-
- STRAIN = ELASTISCHE VERFORMUNG
- MAGNETIC FIELD = MAGNETFELD
-
7D
-
- STRAIN = ELASTISCHE VERFORMUNG
-
9
-
- CURIE TEMPERATURE = CURIE-TEMPERATUR
-
10
-
- MARTENSITIC START TEMPERATURE = MARTENSITISCHE
AUSGANGSTEMPERATUR
-
11
-
- SATURATION MAGNETIZATION = SÄTTIGUNGS-MAGNETISIERUNG
-
12
-
- Martensite = Martensit
- Austenite = Austenit
-
13
-
- MAGNETIZATION = MAGNETISIERUNG
- TEMPERATURE (KELVIN) = TEMPERATUR (KELVIN)