EP0151479A2 - Steuervorrichtung - Google Patents
Steuervorrichtung Download PDFInfo
- Publication number
- EP0151479A2 EP0151479A2 EP85101152A EP85101152A EP0151479A2 EP 0151479 A2 EP0151479 A2 EP 0151479A2 EP 85101152 A EP85101152 A EP 85101152A EP 85101152 A EP85101152 A EP 85101152A EP 0151479 A2 EP0151479 A2 EP 0151479A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- movement
- sensors
- control
- control rod
- cursor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05G—CONTROL DEVICES OR SYSTEMS INSOFAR AS CHARACTERISED BY MECHANICAL FEATURES ONLY
- G05G9/00—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously
- G05G9/02—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only
- G05G9/04—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously
- G05G9/047—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously the controlling member being movable by hand about orthogonal axes, e.g. joysticks
-
- C—CHEMISTRY; METALLURGY
- C21—METALLURGY OF IRON
- C21D—MODIFYING THE PHYSICAL STRUCTURE OF FERROUS METALS; GENERAL DEVICES FOR HEAT TREATMENT OF FERROUS OR NON-FERROUS METALS OR ALLOYS; MAKING METAL MALLEABLE, e.g. BY DECARBURISATION OR TEMPERING
- C21D3/00—Diffusion processes for extraction of non-metals; Furnaces therefor
- C21D3/02—Extraction of non-metals
- C21D3/04—Decarburising
-
- C—CHEMISTRY; METALLURGY
- C21—METALLURGY OF IRON
- C21D—MODIFYING THE PHYSICAL STRUCTURE OF FERROUS METALS; GENERAL DEVICES FOR HEAT TREATMENT OF FERROUS OR NON-FERROUS METALS OR ALLOYS; MAKING METAL MALLEABLE, e.g. BY DECARBURISATION OR TEMPERING
- C21D8/00—Modifying the physical properties of ferrous metals or ferrous alloys by deformation combined with, or followed by, heat treatment
- C21D8/02—Modifying the physical properties of ferrous metals or ferrous alloys by deformation combined with, or followed by, heat treatment during manufacturing of plates or strips
- C21D8/04—Modifying the physical properties of ferrous metals or ferrous alloys by deformation combined with, or followed by, heat treatment during manufacturing of plates or strips to produce plates or strips for drawing, e.g. for deep-drawing
- C21D8/0421—Modifying the physical properties of ferrous metals or ferrous alloys by deformation combined with, or followed by, heat treatment during manufacturing of plates or strips to produce plates or strips for drawing, e.g. for deep-drawing characterised by the working steps
- C21D8/0426—Hot rolling
-
- C—CHEMISTRY; METALLURGY
- C21—METALLURGY OF IRON
- C21D—MODIFYING THE PHYSICAL STRUCTURE OF FERROUS METALS; GENERAL DEVICES FOR HEAT TREATMENT OF FERROUS OR NON-FERROUS METALS OR ALLOYS; MAKING METAL MALLEABLE, e.g. BY DECARBURISATION OR TEMPERING
- C21D8/00—Modifying the physical properties of ferrous metals or ferrous alloys by deformation combined with, or followed by, heat treatment
- C21D8/02—Modifying the physical properties of ferrous metals or ferrous alloys by deformation combined with, or followed by, heat treatment during manufacturing of plates or strips
- C21D8/04—Modifying the physical properties of ferrous metals or ferrous alloys by deformation combined with, or followed by, heat treatment during manufacturing of plates or strips to produce plates or strips for drawing, e.g. for deep-drawing
- C21D8/0447—Modifying the physical properties of ferrous metals or ferrous alloys by deformation combined with, or followed by, heat treatment during manufacturing of plates or strips to produce plates or strips for drawing, e.g. for deep-drawing characterised by the heat treatment
- C21D8/0457—Modifying the physical properties of ferrous metals or ferrous alloys by deformation combined with, or followed by, heat treatment during manufacturing of plates or strips to produce plates or strips for drawing, e.g. for deep-drawing characterised by the heat treatment with diffusion of elements, e.g. decarburising, nitriding
-
- C—CHEMISTRY; METALLURGY
- C21—METALLURGY OF IRON
- C21D—MODIFYING THE PHYSICAL STRUCTURE OF FERROUS METALS; GENERAL DEVICES FOR HEAT TREATMENT OF FERROUS OR NON-FERROUS METALS OR ALLOYS; MAKING METAL MALLEABLE, e.g. BY DECARBURISATION OR TEMPERING
- C21D8/00—Modifying the physical properties of ferrous metals or ferrous alloys by deformation combined with, or followed by, heat treatment
- C21D8/02—Modifying the physical properties of ferrous metals or ferrous alloys by deformation combined with, or followed by, heat treatment during manufacturing of plates or strips
- C21D8/04—Modifying the physical properties of ferrous metals or ferrous alloys by deformation combined with, or followed by, heat treatment during manufacturing of plates or strips to produce plates or strips for drawing, e.g. for deep-drawing
- C21D8/0447—Modifying the physical properties of ferrous metals or ferrous alloys by deformation combined with, or followed by, heat treatment during manufacturing of plates or strips to produce plates or strips for drawing, e.g. for deep-drawing characterised by the heat treatment
- C21D8/0473—Final recrystallisation annealing
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05G—CONTROL DEVICES OR SYSTEMS INSOFAR AS CHARACTERISED BY MECHANICAL FEATURES ONLY
- G05G9/00—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously
- G05G9/02—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only
- G05G9/04—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously
- G05G9/047—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously the controlling member being movable by hand about orthogonal axes, e.g. joysticks
- G05G2009/04703—Mounting of controlling member
- G05G2009/04722—Mounting of controlling member elastic, e.g. flexible shaft
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05G—CONTROL DEVICES OR SYSTEMS INSOFAR AS CHARACTERISED BY MECHANICAL FEATURES ONLY
- G05G9/00—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously
- G05G9/02—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only
- G05G9/04—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously
- G05G9/047—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously the controlling member being movable by hand about orthogonal axes, e.g. joysticks
- G05G2009/0474—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously the controlling member being movable by hand about orthogonal axes, e.g. joysticks characterised by means converting mechanical movement into electric signals
- G05G2009/04762—Force transducer, e.g. strain gauge
Definitions
- the invention relates to a control device for converting mechanical movements and / or forces into electrical signals according to the preamble of claim 1.
- a known control device of this type (DE-A-20 30 048)
- the output signals of the force- or motion-sensitive sensors are used to control electric motors, which in turn interact with aiming devices for tracking instruments.
- hand movements of a controlling person can thus be converted into corresponding mechanical movements of an object.
- the invention has for its object to provide a control device for converting mechanical movements and / or forces into electrical signals, in which an interference-free transmission of mechanical actuations of the control rod in electrical signals and optimal use of all movement possibilities of the control rod by evaluating the signals are possible in electronic means of representation.
- a control device of the type mentioned at the outset has the features of the characterizing part of claim 1.
- control parameters For example, when controlling a cursor on the screen of a display device, it is advantageous not only to influence the direction of movement, but also the speed of movement of the cursor via the sensors. In the arrangement according to the invention, this can easily be achieved by detecting the extent to which the sensors are influenced. Also a change in the image representation itself, e.g. B. with regard to the location or the scale of the representation, is possible here by the large number of movement components of the control rod, so that all of these control functions can be carried out by actuating the free end of the control rod with one hand. It is also possible to detect with the inventive arrangement in a moving direction of a V erschlußsignal (Lock) for fixing the image representation, whereby either the position of the cursor or other properties can be kept of illustration.
- V erschlußsignal Lock
- strain gauges either semiconductor or conventional metal Strain gauges that change their electrical values when stretched.
- control device advantageously has the features according to one of subclaims 2 to 4 or a combination of these claims.
- a flexible section 2 is fixedly mounted on a holder 3; the other end of the section 2 carries a handle 4 with which the control rod 1 can be operated by hand.
- the flexible section 2 carries the strain gauges made of semiconductor material as force or motion sensitive sensors. Strain gauges 5 and 6 (strain gauges 6 not visible here since it lies on the opposite side of section 2) lie here in the upper part transversely to the longitudinal axis 7 of the control rod 1. Parallel to the course of the longitudinal axis 7 are strain gauges 8, 9, 10 and 11 attached (strain gauges 11 not visible here, because it Dehnun g smeß- the strip 9 on the other side of the section 2 opposite).
- section AA ' is visible, as a result of which the position of the two strain gauges 5 and 6 on section 2 can be seen.
- section BB ' is shown with the strain gauges 8, 9, 10 and 11, and in part c) the section CC 1 is drawn, the two strain gauges 12 and 13 being indicated one above the other.
- Part d) of FIG. 2 shows the forces that can be applied to the control rod 1 and thus to the flexible section 2.
- the force K 1 is effective in the direction of the longitudinal axis 7, in the illustration given here acting in the plane of the drawing, but it can also be effective in the opposite direction.
- the forces K2 and K3 each act transversely to the longitudinal axis 7 and are at an angle of 90 ° to one another.
- a torque M 1 can also be applied, with which a torsional movement of the flexible section 2 and thus of the control rod can be carried out in the direction shown here, but also in the opposite direction. All of these actuation forces can be adapted to the human hand with which the control rod is operated.
- FIG. 3 shows an application of the control rod 1 according to the invention, in which a marker point 17 called a cursor is to be moved on a screen 15 of a display device 16 in its position on the screen.
- the forces required for this on the control rod 1 are shown in FIG. 4, the partial forces K2 and K3 detected by the strain gauges 8 ... 11 leading to a total force K in the movement indicated in FIG. 3 from bottom left to top right is determined by the size of the partial forces K2 and K3 in their direction and in their amount.
- the control of the cursor 17 can be carried out in a simple manner in such a way that the direction of the cursor movement can be determined from the vector direction of the total force K and the speed of the cursor movement from the vector length of the total force K.
- FIG. 4 also shows the forces K 1 and M 1, with which, for example, a shift or a rotation of the entire display on the screen 15 by the torque M 1 or a change in the scale of the display on the screen 15 with the force K 1 is achieved can.
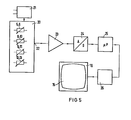
- the individual sensors or strain gauges 5... 13 are shown schematically in a module 20.
- the strain gauges are supplied with voltage by a supply device 21 and can, for example, be connected together in a bridge circuit within the module 20 in such a way that they generate a corresponding electrical signal at the output 22 when a force is exerted on the sensors or strain gauges.
- a measuring amplifier 23 which can also have an integrating effect, these signals are amplified and converted in an A / D converter 24 into a corresponding binary information.
- the microprocessor 25 connected to it converts the signals into corresponding information for the line-type image representation required here and determines, for example, the movement direction and speed variables to be calculated from the vector direction or the vector length of the total force K.
- the output signals of the microprocessor 25 are fed to the signal processing parts of the display device 16 via a display device control 26, so that the effects on the movable cursor 17 or on the change in the image display in the display device 16 can be carried out on the screen 15 with reference to FIGS .
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Position Input By Displaying (AREA)
Abstract
Description
- Die Erfindung bezieht sich auf eine Steuervorrichtung für die Umsetzung von mechanischen Bewegungen und/oder Kräften in elektrische Signale gemäß dem Oberbegriff des Anspruchs 1.
- Bei einer bekannten Steuervorrichtung dieser Art (DE-A-20 30 048) werden die Ausgangssignale der kraft- bzw. bewegungsempfindlichen Sensoren zur Steuerung von Elektromotoren herangezogen, die wiederum mit Richtmitteln für Zielverfolgungsinstrumente zusammenwirken. Es können somit bei der bekannten Steuervorrichtung Handbewegungen einer steuernden Person in entsprechende mechanische Bewegungen eines Objekts umgewandelt werden.
- Es ist weiterhin bereits bekannt, von Hand bedienbare Steuerstäbe (sogenannte Joysticks) so aufzubauen, daß an einem beweglich gehaltenen Ende beispielsweise Potentiometer, Drehwinkelgeber oder Schalter angebracht werden, deren Widerstandswerte oder Schaltzustände bei einer Betätigung des Steuerstabs verändert werden können. Die Bewegung kann hier auch in mehreren Freiheitsgraden erfolgen, wobei für jede Bewegungsrichtung beispielsweise ein Potentiometer angebracht ist. Steuerstäbe mit einem solchen Aufbau werden z. B. bei Funkfernsteuerungen für Modellflugzeuge verwendet. Die Nachteile dieser Steuerstäbe sind insbesondere die Verwendung von beweglichen Teilen - z. B. die Schleifer der Potentiometer -, die störanfällig sind, und der eingeschränkte Bewegungsspielraum, der durch die Konstruktion des Steuerstabes mit den mechanisch gekoppelten Potentiometern oder Schaltern vorgegeben ist.
- Der Erfindung liegt die Aufgabe zugrunde, eine Steuervorrichtung für die Umsetzung von mechanischen Bewegungen und/oder Kräften in elektrische Signale zu schaffen, bei der eine störsichere Übertragung von mechanischen Betätigungen des Steuerstabes in elektrische Signale und eine optimale Ausnutzung aller Bewegungsmöglichkeiten des Steuerstabes durch Auswertung der Signale in elektronischen Darstellungsmitteln möglich sind.
- Zur Lösung dieser Aufgabe weist eine Steuervorrichtung der eingangs genannten Art die Merkmale des Kennzeichens des Anspruchs 1 auf.
- Besonders bei der Steuerung einer Bilddarstellung auf Sichtgeräten ist es wünschenswert, eine Vielzahl von Steuerungsparametern ausnutzen zu können. Beispielsweise bei der Steuerung eines Cursors auf dem Bildschirm eines Sichtgerätes ist es vorteilhaft, nicht nur die Bewegungsrichtung, sondern auch die Bewegungsgeschwindigkeit des Cursors über die Sensoren zu beeinflussen. Bei der erfindungsgemäßen Anordnung kann dies leicht durch Erfassung des Ausmaßes der Beeinflussung der Sensoren erreicht werden. Auch eine Veränderung der Bilddarstellung an sich, z. B. hinsichtlich der Lage oder des Maßstabs der Darstellung, ist hier durch die Vielzahl der Bewegungskomponenten des Steuerstabes möglich, so daß durch eine Betätigung des freien Endes des Steuerstabes mit einer Hand alle diese Steuerfunktionen ausgeführt werden können. Es ist auch denkbar, mit der erfindungsgemäßen Anordnung in einer Bewegungsrichtung ein Verschlußsignal (Lock) für eine Fixierung der Bilddarstellung zu detektieren, wodurch entweder die Stellung des Cursors oder sonstige Eigenschaften der Darstellung festgehalten werden können.
- In vorteilhafter Weise sind die genannten Sensoren sogenannte Mehrkomponenten-Kraftsensoren, nämlich Dehnungsmeßstreifen, wahlweise Halbleiter- oder konventionelle Metall-Dehnungsmeßstreifen, die bei Dehnung eine Änderung ihrer elektrischen Werte erfahren.
- Um eine komfortable Bildschirmsteuerung zu erreichen, weist die erfindungsgemäße Steuervorrichtung in vorteilhafter Weise die Merkmale nach einem der Unteransprüche 2 bis 4 oder einer Kombination dieser Ansprüche auf.
- Die Erfindung wird anhand der Figuren erläutert, wobei
- Figur 1 eine Ansicht eines Ausführungsbeispiels der erfindungsgemäßen Steuervorrichtung,
- Figur 2 Schnittdarstellungen durch verschiedene Schnittebenen des flexiblen Teilstücks eines Steuerstabes,
- Figur 3 einen Anwendungsfall zur Steuerung eines Cursors auf einem Bildschirm,
- Figur 4 eine Zerlegung der Kraft- bzw. Bewegungskomponenten des Steuerstabes und
- Figur 5 ein elektrisches Blockschaltbild für eine Anwendung des Steuerstabes zur Steuerung der Darstellung auf dem Bildschirm eines Sichtgerätes zeigen.
- Bei dem in der Figur 1 dargestellten Ausführungsbeispiel eines Steuerstabes 1 ist ein flexibles Teilstück 2 an einer Halterung 3 fest montiert; das andere Ende des Teilstücks 2 trägt einen Griff 4, mit dem der Steuerstab 1 von Hand betätigbar ist. Das flexible Teilstück.2 trägt die Dehnungsmeßstreifen aus Halbleitermaterial als kraft- bzw. bewegungsempfindliche Sensoren. Dehnungsmeßstreifen 5 und 6 (Dehnungsmeßstreifen 6 hier nicht sichtbar, da er auf der gegenüberliegenden Seite des Teilstücks 2 liegt) liegen hier im oberen Teil quer zur Längsachse 7 des Steuerstabs 1. Parallel zum Verlauf der Längsachse 7 sind Dehnungsmeßstreifen 8, 9, 10 und 11 angebracht (Dehnungsmeßstreifen 11 hier nicht sichtbar, da er dem Dehnungsmeß- streifen 9 auf der anderen Seite des Teilstücks 2 gegenüberliegt). Weiterhin befinden sich zusätzliche Dehnungsmeßstreifen 12 und 13 auf dem Teilstück 2, die jeweils in 45° zur Längsachse 7 gekreuzt übereinander angeordnet sind. In der Figur sind ferner Schnittebenen A-A', B-B' und C-CI angegeben, wobei diese Schnittdarstellungen in der Figur 2 gesondert gezeichnet sind.
- Im Teil a) der Figur 2 ist der Schnitt A-A' sichtbar, wodurch die Lage der beiden Dehnungsmeßstreifen 5 und 6 am Teilstück 2 erkennbar ist. Im Teil b) ist der Schnitt B-B' mit den Dehnungsmeßstreifen 8, 9, 10 und 11 dargestellt, und im Teil c) ist der Schnitt C-C1 gezeichnet, wobei die beiden Dehnungsmeßstreifen 12 und 13 übereinanderliegend angegeben sind. Im Teil d) der Figur 2 sind die Kräfte eingezeichnet, die auf den Steuerstab 1 und somit auf das flexible Teilstück 2 aufbringbar sind. Die Kraft Kl ist in Richtung der Längsachse 7 wirksam, wobei sie in der hier angegebenen Darstellung in die Zeichenebene hineinwirkt, sie kann jedoch auch in entgegengesetzter Richtung wirksam sein. Die Kräfte K2 und K3 wirken jeweils quer zur Längsachse 7 und befinden sich in einem Winkel von 90° zueinander. Außerdem kann noch ein Drehmoment Ml aufgebracht werden, mit dem eine Torsionsbewegung des flexiblen Teilstücks 2 und somit des Steuerstabs in der hier dargestellten Richtung, aber auch in der entgegengesetzten Richtung durchgeführt werden kann. Alle diese Betätigungskräfte können in ihrem Ausmaß an die menschliche Hand angepaßt werden, mit der die Bedienung des Steuerstabs vorgenommen wird.
- Aus den Darstellungen nach der Figur 2 ist entnehmbar, daß beispielsweise bei einer durch eine entsprechende Bewegung des Steuerstabs verursachten Kraft Kl die Dehnungsmeßstreifen 12 und 13 auf Dehnung beansprucht werden und somit eine Veränderung ihrer elektrischen Eigenschaften und die Erzeu- gung eines entsprechenden elektrischen Signals bewirkt werden kann. Bei Einwirkung einer Kraft K2 durch eine entsprechende Bewegung des Steuerstabs 1 wird insbesondere der Dehnungsmeßstreifen 9 (vergleiche Teil b) der Figur 2) auf Dehnung beansprucht und der Dehnungsmeßstreifen 11 gestaucht, wodurch auch mit diesen Dehnungsmeßstreifen entsprechende elektrische Signale erzeugt werden können. Bei Einwirkung einer Kraft K3 wird insbesondere der Dehnungsmeßstreifen 8 auf Dehnung und der Dehnungsmeßstreifen 10 auf Stauchung beansprucht, wodurch auch diese Bewegung des Steuerstabs 1 detektiert und in ein elektrisches Signal umgesetzt werden kann. Eine Torsionsbewegung aufgrund des Drehmomentes M1 führt zu einer Dehnung bzw. Stauchung der beiden Dehnungsmeßstreifen 12 bzw. 13 und somit zu einem entsprechenden drehmomentabhängigen, elektrischen Signal.
- In der Figur 3 ist ein Anwendungsfall des erfindungsgemäßen Steuerstabs 1 dargestellt, wobei auf einem Bildschirm 15 eines Sichtgeräts 16 ein Cursor genannter Markierungspunkt 17 in seiner Lage auf dem Bildschirm verschoben werden soll. Die hierfür erforderlichen Kräfte am Steuerstab 1 sind in der Figur 4 dargestellt, wobei bei der in der Figur 3 angedeuteten Bewegung von links unten nach rechts oben die von den Dehnungsmeßstreifen 8 ... 11 detektierten Teilkräfte K2 und K3 zu einer Gesamtkraft K führen, die durch die Größe der Teilkräfte K2 und K3 in ihrer Richtung und in ihrem Betrag festgelegt ist. Die Steuerung des Cursors 17 kann in einfacher Weise derart vorgenommen werden, daß aus der Vektorrichtung der Gesamtkraft K die Cursorbewegungsrichtung und aus der Vektorlänge der Gesamtkraft K die Cursorbewegungsgeschwindigkeit erfaßt werden kann. In der Figur 4 sind außerdem noch die Kräfte Kl und Ml dargestellt, mit denen beispielsweise eine Verschiebung oder eine Drehung der gesamten Darstellung auf dem Bildschirm 15 durch das Drehmoment Ml oder eine Veränderung des Maßstabs der Darstellung auf dem Bildschirm 15 mit der Kraft Kl erreicht werden kann.
- Bei dem in der Figur 5 dargestellten elektrischen Blockschaltbild sind die einzelnen Sensoren bzw. Dehnungsmeßstreifen 5 ... 13 (vergleiche Figur 1) schematisch in einem Baustein 20 dargestellt. Die Dehnungsmeßstreifen werden von einem Speisegerät 21 mit einer Spannung versorgt und können beispielsweise innerhalb des Bausteins 20 in einer Brückenschaltung so zusammengeschaltet werden, daß sie bei einer Krafteinwirkung auf die Sensoren bzw. Dehnungsmeßstreifen ein entsprechendes elektrisches Signal am Ausgang 22 erzeugen. In einem Meßverstärker 23, der auch eine integrierende Wirkung aufweisen kann, werden diese Signale verstärkt und in einem A/D-Wandler 24 in eine entsprechende binäre Information umgewandelt. Der daran angeschlossene Mikroprozessor 25 formt die Signale in entsprechende Informationen für die hier geforderte zeilenmäßige Bilddarstellung um und ermittelt beispielsweise die aus der Vektorrrichtung bzw. der Vektorlänge der Gesamtkraft K zu berechnenden Bewegungsrichtungs- und Geschwindigkeitsgrößen. Die Ausgangssignale des Mikroprozessors 25 werden über eine Sichtgerätesteuerung 26 den Signalverarbeitungsteilen des Sichtgeräts 16 zugeführt, so daß auf dem Bildschirm 15 die anhand der Figuren 2 bis 4 dargelegten Auswirkungen auf den beweglichen Cursor 17 bzw. auf die Veränderung der Bilddarstellung im Sichtgerät 16 durchgeführt werden können.
Claims (4)
dadurch gekennzeichnet , daß
- bei Beendigung der Auslenkung der Sensoren (5 ... 13) der Cursor bzw. die Bildschirmdarstellung im zuletzt erreichten Zustand verbleibt.
- die Ausgangssignale der Sensoren (5 ... 13) von einem integrierenden Verstärker (23) verarbeitet werden.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE3404047 | 1984-02-06 | ||
| DE19843404047 DE3404047A1 (de) | 1984-02-06 | 1984-02-06 | Steuerstab |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP0151479A2 true EP0151479A2 (de) | 1985-08-14 |
| EP0151479A3 EP0151479A3 (en) | 1985-09-18 |
| EP0151479B1 EP0151479B1 (de) | 1989-05-17 |
Family
ID=6226866
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP85101152A Expired EP0151479B1 (de) | 1984-02-06 | 1985-02-04 | Steuervorrichtung |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP0151479B1 (de) |
| DE (2) | DE3404047A1 (de) |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2616956A1 (fr) * | 1987-06-18 | 1988-12-23 | Sintre Francois | Nouveau dispositif pour commandes directionnelles |
| GB2211280A (en) * | 1987-10-16 | 1989-06-28 | Daco Scient Limited | Joystick |
| EP0447334A1 (de) * | 1990-03-15 | 1991-09-18 | SEXTANT Avionique | Manipulator mit Dehnme streifen |
| WO1993020535A3 (en) * | 1992-03-25 | 1993-11-25 | Penny & Giles Blackwood Ltd | Joystick |
| WO1995027890A1 (en) * | 1994-04-11 | 1995-10-19 | Peter Neltoft | Device for use in manual control of the movement of a real or imaginary object |
| EP0725329A1 (de) * | 1995-02-06 | 1996-08-07 | Compaq Computer Corporation | Versenkbarer Steuerknüppel für tragbaren Rechner |
| WO1996038810A1 (de) * | 1995-06-02 | 1996-12-05 | Gerhard Wergen | Analoges stellelement |
| EP0864958A3 (de) * | 1997-03-07 | 1998-09-30 | International Business Machines Corporation | Steuervorrichtung für Informationsverarbeitungsgerät |
| WO2000077589A1 (de) * | 1999-06-11 | 2000-12-21 | Wittenstein Gmbh & Co. Kg | Vorrichtung zum steuern einer einrichtung |
| EP0844584A3 (de) * | 1996-11-25 | 2002-07-03 | CTS Corporation | Hinweisanordnung |
| EP1313119A2 (de) | 2001-11-16 | 2003-05-21 | Robert Bosch Gmbh | Bedienelement |
| DE202004018299U1 (de) * | 2004-11-25 | 2006-04-06 | Liebherr-Hydraulikbagger Gmbh | Baumaschine mit Joystick-Steuerung |
| US20090248042A1 (en) * | 2008-03-27 | 2009-10-01 | Kirschenman Mark B | Model catheter input device |
| US9795447B2 (en) | 2008-03-27 | 2017-10-24 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter device cartridge |
| US9888973B2 (en) | 2010-03-31 | 2018-02-13 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Intuitive user interface control for remote catheter navigation and 3D mapping and visualization systems |
| US10231788B2 (en) | 2008-03-27 | 2019-03-19 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter system |
| US10357322B2 (en) | 2009-07-22 | 2019-07-23 | St. Jude Medical, Atrial Fibrillation Division, Inc. | System and method for controlling a remote medical device guidance system in three-dimensions using gestures |
| US10426557B2 (en) | 2008-03-27 | 2019-10-01 | St. Jude Medical, Atrial Fibrillation Division, Inc. | System and method of automatic detection of obstructions for a robotic catheter system |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3710256A1 (de) * | 1987-03-28 | 1988-10-13 | Wabco Westinghouse Fahrzeug | Sollwertgeber |
| DE3716892A1 (de) * | 1987-05-20 | 1988-12-01 | Fresenius Ag | Vorrichtung zur eingabe von numerischen bzw. alphanumerischen daten in ein geraet |
| DE3830933C1 (de) * | 1988-09-12 | 1989-10-26 | Eligiusz Dipl.-Ing. 7538 Keltern De Wajda | |
| DE3923890A1 (de) * | 1989-07-19 | 1991-01-31 | Habermeier Peter Dipl Ing Fh | Einrichtung fuer die steuerung eines bildschirm-cursors |
| DE3933575A1 (de) * | 1989-10-07 | 1991-04-18 | Hartmut Prof Dr Janocha | Tasteinrichtung |
| DE19719038C2 (de) * | 1997-04-30 | 2002-10-24 | Art & Com Medientechnologie Un | Vorrichtung und Verfahren und ihre Verwendung zur veränderbaren Darstellung |
| DE19836261C1 (de) * | 1998-08-11 | 1999-12-09 | Mannesmann Vdo Ag | Bedienvorrichtung mit einem Drehschalter |
| DE19837510A1 (de) | 1998-08-19 | 2000-02-24 | Bayerische Motoren Werke Ag | Vorrichtung zur Steuerung der Wiedergabe eines auf einem Fahrzeug-Bildschirm dargestellten Bildes |
| DE19903830A1 (de) * | 1999-02-01 | 2000-08-17 | Asim Genc | Dateneingabe- und/oder Steuergerät, insbesondere für einen Computer |
| US9241768B2 (en) | 2008-03-27 | 2016-01-26 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Intelligent input device controller for a robotic catheter system |
| US8641663B2 (en) | 2008-03-27 | 2014-02-04 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter system input device |
| US8641664B2 (en) | 2008-03-27 | 2014-02-04 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter system with dynamic response |
| US8317744B2 (en) | 2008-03-27 | 2012-11-27 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter manipulator assembly |
| US8754910B2 (en) | 2008-10-01 | 2014-06-17 | Logitech Europe S.A. | Mouse having pan, zoom, and scroll controls |
| US9330497B2 (en) | 2011-08-12 | 2016-05-03 | St. Jude Medical, Atrial Fibrillation Division, Inc. | User interface devices for electrophysiology lab diagnostic and therapeutic equipment |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3447766A (en) * | 1967-02-14 | 1969-06-03 | Bendix Corp | Control stick with solid state sensors |
| US3628394A (en) * | 1970-02-09 | 1971-12-21 | Sperry Rand Corp | Operator-manipulative control apparatus |
| DE2030048A1 (de) * | 1970-06-12 | 1971-11-04 | Askania Gmbh | Steuervorrichtung mit einem nach Art eines Steuerknüppels ausgebildeten verschwenkbaren Hand-Betätigungsglied |
| FR2312070A1 (fr) * | 1975-05-23 | 1976-12-17 | France Etat | Organe de puissance pour pilotage en effort pur |
| US4161726A (en) * | 1977-04-06 | 1979-07-17 | Texas Instruments Incorporated | Digital joystick control |
| US4148014A (en) * | 1977-04-06 | 1979-04-03 | Texas Instruments Incorporated | System with joystick to control velocity vector of a display cursor |
| DE2942003C2 (de) * | 1979-10-17 | 1984-08-02 | Danfoss A/S, Nordborg | Elektrische Steuervorrichtung mit einem Steuerhebel |
-
1984
- 1984-02-06 DE DE19843404047 patent/DE3404047A1/de not_active Withdrawn
-
1985
- 1985-02-04 EP EP85101152A patent/EP0151479B1/de not_active Expired
- 1985-02-04 DE DE8585101152T patent/DE3570301D1/de not_active Expired
Cited By (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2616956A1 (fr) * | 1987-06-18 | 1988-12-23 | Sintre Francois | Nouveau dispositif pour commandes directionnelles |
| GB2211280A (en) * | 1987-10-16 | 1989-06-28 | Daco Scient Limited | Joystick |
| GB2211280B (en) * | 1987-10-16 | 1991-10-30 | Daco Scient Limited | Joystick |
| EP0447334A1 (de) * | 1990-03-15 | 1991-09-18 | SEXTANT Avionique | Manipulator mit Dehnme streifen |
| FR2659789A1 (fr) * | 1990-03-15 | 1991-09-20 | Sextant Avionique | Manipulateur a jauges de contrainte. |
| US5228348A (en) * | 1990-03-15 | 1993-07-20 | Sextant Avionique | Strain gauge joystick |
| US5831596A (en) * | 1992-03-25 | 1998-11-03 | Penney & Giles Blackwood Limited | Joystick controller using magnetic position sensors and a resilient control arm with sensor used to measure its flex |
| WO1993020535A3 (en) * | 1992-03-25 | 1993-11-25 | Penny & Giles Blackwood Ltd | Joystick |
| US5859372A (en) * | 1994-04-11 | 1999-01-12 | Neltoft; Peter | Device for use in manual control of the movement of a real or imaginary object |
| WO1995027890A1 (en) * | 1994-04-11 | 1995-10-19 | Peter Neltoft | Device for use in manual control of the movement of a real or imaginary object |
| EP0725329A1 (de) * | 1995-02-06 | 1996-08-07 | Compaq Computer Corporation | Versenkbarer Steuerknüppel für tragbaren Rechner |
| WO1996038810A1 (de) * | 1995-06-02 | 1996-12-05 | Gerhard Wergen | Analoges stellelement |
| US6201196B1 (en) | 1995-06-02 | 2001-03-13 | Gerhard Wergen | Joystick assembly |
| EP0844584A3 (de) * | 1996-11-25 | 2002-07-03 | CTS Corporation | Hinweisanordnung |
| EP0864958A3 (de) * | 1997-03-07 | 1998-09-30 | International Business Machines Corporation | Steuervorrichtung für Informationsverarbeitungsgerät |
| EP1528449A1 (de) | 1999-06-11 | 2005-05-04 | Wittenstein AG | Vorrichtung zum Steuern einer Einrichtung |
| WO2000077589A1 (de) * | 1999-06-11 | 2000-12-21 | Wittenstein Gmbh & Co. Kg | Vorrichtung zum steuern einer einrichtung |
| EP1313119A2 (de) | 2001-11-16 | 2003-05-21 | Robert Bosch Gmbh | Bedienelement |
| EP1313119A3 (de) * | 2001-11-16 | 2005-05-04 | Robert Bosch Gmbh | Bedienelement |
| DE202004018299U1 (de) * | 2004-11-25 | 2006-04-06 | Liebherr-Hydraulikbagger Gmbh | Baumaschine mit Joystick-Steuerung |
| US20090248042A1 (en) * | 2008-03-27 | 2009-10-01 | Kirschenman Mark B | Model catheter input device |
| US9795447B2 (en) | 2008-03-27 | 2017-10-24 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter device cartridge |
| US10231788B2 (en) | 2008-03-27 | 2019-03-19 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter system |
| US10426557B2 (en) | 2008-03-27 | 2019-10-01 | St. Jude Medical, Atrial Fibrillation Division, Inc. | System and method of automatic detection of obstructions for a robotic catheter system |
| US11717356B2 (en) | 2008-03-27 | 2023-08-08 | St. Jude Medical, Atrial Fibrillation Division, Inc. | System and method of automatic detection of obstructions for a robotic catheter system |
| US10357322B2 (en) | 2009-07-22 | 2019-07-23 | St. Jude Medical, Atrial Fibrillation Division, Inc. | System and method for controlling a remote medical device guidance system in three-dimensions using gestures |
| US9888973B2 (en) | 2010-03-31 | 2018-02-13 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Intuitive user interface control for remote catheter navigation and 3D mapping and visualization systems |
Also Published As
| Publication number | Publication date |
|---|---|
| DE3404047A1 (de) | 1985-08-08 |
| EP0151479B1 (de) | 1989-05-17 |
| DE3570301D1 (en) | 1989-06-22 |
| EP0151479A3 (en) | 1985-09-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0151479B1 (de) | Steuervorrichtung | |
| DE1698108C3 (de) | KrattmeBvorrichtung | |
| WO2005058092A1 (de) | Bewegbares möbelteil | |
| EP0325674A1 (de) | Wandlerelement zur Messung einer Drehbeschleunigung | |
| DE3131673A1 (de) | Digitales elektrisches laengenmessgeraet | |
| DE69406057T2 (de) | Werkzeug zum Messen eines Drehmoments, wie z.b. ein elektronischer Drehmomentschlüssel | |
| DE2106997A1 (de) | Vorrichtung zum Messen von Verschie bungen im zweidimensional Bereich | |
| DE10246031A1 (de) | Positions- und/oder Bewegungsfühler mit Überlastungsschutz | |
| DE68905244T2 (de) | Messinstrumente. | |
| EP1511982A1 (de) | Messvorrichtung zum messen von positionen oder bewegungen | |
| DE8403396U1 (de) | Steuerstab | |
| CH660234A5 (de) | Elektronische waage mit einem koppelelement zur uebertragung senkrechter kraefte. | |
| DE1473543A1 (de) | Dehnungspruefgeraet,insbesondere zur Pruefung von Textilfasern | |
| DE2832986C2 (de) | Schiebelehre | |
| DE1276348B (de) | Messgeber fuer elektrische Spannungen oder Stroeme | |
| DE1282301B (de) | Vorrichtung zum Messen von Wegen | |
| DE3512969C2 (de) | ||
| DE2942443C2 (de) | Log- Anzeigegerät für die Schiffsnavigation | |
| DE3246246A1 (de) | Potentiometer | |
| DE102018102991B3 (de) | Bedienelement | |
| EP0893391A2 (de) | Vorrichtung zur drahtlosen Steuerung | |
| DE202024101392U1 (de) | Schaltbedienelement zur Betätigung durch eine Druckkraft und durch eine Zugkraft für ein Kraftfahrzeug | |
| DE4227764A1 (de) | Sensor zum Erfassen mechanischer Belastungen | |
| DE69622610T2 (de) | Steuerungsvorrichtung geeignet für den Hinweis und die Bewegung eines Objektes auf einem Bildschirm | |
| CH409422A (de) | Tastmessvorrichtung zur Bestimmung von Abmessungen an einem Werkstück |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Designated state(s): DE FR GB |
|
| AK | Designated contracting states |
Designated state(s): DE FR GB |
|
| 17P | Request for examination filed |
Effective date: 19860226 |
|
| 17Q | First examination report despatched |
Effective date: 19880610 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): DE FR GB |
|
| REF | Corresponds to: |
Ref document number: 3570301 Country of ref document: DE Date of ref document: 19890622 |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) | ||
| ET | Fr: translation filed | ||
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 19910219 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 19910424 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 19920117 Year of fee payment: 8 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Effective date: 19921030 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Effective date: 19921103 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Effective date: 19930204 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 19930204 |