EP0243943A1 - Outil automatique de serrage et de desserrage d'une vis d'une connexion a brides entre deux tuyaux - Google Patents
Outil automatique de serrage et de desserrage d'une vis d'une connexion a brides entre deux tuyaux Download PDFInfo
- Publication number
- EP0243943A1 EP0243943A1 EP87106176A EP87106176A EP0243943A1 EP 0243943 A1 EP0243943 A1 EP 0243943A1 EP 87106176 A EP87106176 A EP 87106176A EP 87106176 A EP87106176 A EP 87106176A EP 0243943 A1 EP0243943 A1 EP 0243943A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- pipes
- axis
- tool
- rail
- nut
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B27/00—Hand tools, specially adapted for fitting together or separating parts or objects whether or not involving some deformation, not otherwise provided for
- B25B27/14—Hand tools, specially adapted for fitting together or separating parts or objects whether or not involving some deformation, not otherwise provided for for assembling objects other than by press fit or detaching same
- B25B27/16—Hand tools, specially adapted for fitting together or separating parts or objects whether or not involving some deformation, not otherwise provided for for assembling objects other than by press fit or detaching same abutted flanges
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B21/00—Portable power-driven screw or nut setting or loosening tools; Attachments for drilling apparatus serving the same purpose
- B25B21/002—Portable power-driven screw or nut setting or loosening tools; Attachments for drilling apparatus serving the same purpose for special purposes
-
- G—PHYSICS
- G21—NUCLEAR PHYSICS; NUCLEAR ENGINEERING
- G21F—PROTECTION AGAINST X-RADIATION, GAMMA RADIATION, CORPUSCULAR RADIATION OR PARTICLE BOMBARDMENT; TREATING RADIOACTIVELY CONTAMINATED MATERIAL; DECONTAMINATION ARRANGEMENTS THEREFOR
- G21F7/00—Shielded cells or rooms
- G21F7/06—Structural combination with remotely-controlled apparatus, e.g. with manipulators
- G21F7/066—Remotely manipulated tools
Definitions
- the invention relates to an automatic tool for tightening and loosening a screw or nut belonging to a flanged connection between two pipes, comprising a wrench which can be placed on the head of the screw or nut and which is rotated by a motor.
- connection between two flanges requires the tightening of a certain number of bolts, which are distributed regularly around the axis of the pipes and pass through two flanges which constitute the ends of these pipes.
- tightening of the connection flange bolts can no longer be done manually, but on the contrary requires the use of an automatic tool.
- such tools required the continuous assistance of a remote manipulator, which brings the tool closer to the flange, guides the tool key to the nut to be tightened, monitors the tightening operation, then releases the nut wrench to be able to engage it on the next nut of the same flange connection and so on.
- the invention aims to provide an automatic tool as defined above, which no longer requires assistance by the manipulator once it is placed on a pipe, and which can be used even when the pipes are hardly accessible.
- the automatic tightening and loosening tool which is characterized according to the invention by the fact - that the motor is mounted on a support structure having a semi-annual shape, adapted to the diameter of the pipes, - that a circular rail is fixed around one of the pipes at a predetermined distance from the flanges, - that two wheels capable of being guided by said rail are mounted, movably in the direction of the axis of the pipes, on a chassis, which is articulated on said structure, - A third wheel capable of being guided by said rail is mounted, movably in the direction of the axis of the pipes, on said structure, the three wheels being applied against said rail at regular angles when the chassis is located in an operative position, while one of the wheels emerges from the rail when the chassis is retracted around its axis of articulation, - that pneumatic means are provided to move in translation of said support structure relative to the wheels, parallel to the axis of the pipes, - a lever of semi-annual form is articulated on said
- the tool shown in the four figures is used to tighten nuts 1, which pass through two flanges 1 and 3, these flanges constituting the ends of two pipes 4 and 5, whose axes 6 are aligned.
- the tool is specially designed for the diameter of the pipes 4 and 5 and the diameter on which the axes 7 of the connection bolts 26 are located, which are integral with the lower flange.
- the only adaptation to this tool is constituted by a guide rail 8, which is fixed on the external surface of one of the pipes and which cooperates with three guide wheels 9 to 11, which is provided with the tool.
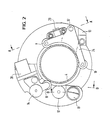
- the tool In fig. 1, the tool is shown in the retracted position relative to the flanges 2 and 3, but fixed in a self-supporting manner to the pipe 4 through the rail 8 and the wheels 9 to 11.
- two namely the wheels 9 and 10 are carried by a common frame 24, which is mounted through a hinge pin 12 on a support structure 13 of a generally semiannular shape.
- the third wheel 11 is supported by the support structure 13 and it can be driven by a motor 14, so that the semi-annual support structure can rotate around the axis 6.
- axes of the three wheels 9, 10, 11 act as a pneumatic slide for the support structure 13 so that the latter can be lowered or mounted in the direction of the axis 6 of the pipes, when applying pressurized air to cylinders 15 and 20, in which pistons such as 16 slide integral with the axis of the corresponding wheel.
- Fig. 1 shows the upper position of this support structure, position in which the nuts 1 are not reached by the tool.
- the key 17 proper is visible in FIG. 4. It consists of a tube of hexagonal internal section adapted to the shape of the nut 1.
- a rod 25 for storing nuts extends along an axis 18. It receives loose nuts or it provides nuts which must be tightened on a bolt 26. The nuts are retained on this rod by means of balls such as 27, which project slightly and elastically from radial housings in this rod and which are supported on springs.
- a pneumatic motor reversible 19 is coupled to this key to rotate it in the tightening or loosening direction.
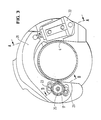
- the tool comprises a lever 21, which is articulated around the axis 18. By its free end, the lever 21 is coupled to a piston 22, which bears against the support structure 13. This lever encloses the key and it is coupled to the latter by a reversible ratchet and ratchet system 23. In FIG. 3, we only see the ratchets in one direction of rotation, the other ratchets being hidden behind the lever.
- a remote manipulator is used to engage the tool on the pipe concerned. It suffices to present the open face of the semiannular structure for supporting the pipe, the chassis 24 being retracted so that the wheel 10 does not hinder the passage of the pipe 4.
- the wheel 9 on the other hand is now in the cylindrical space that must later occupy the pipe. If the manipulator brings the tool closer to this pipe, the latter finally pushes the wheel 9 backwards and the articulation of the chassis 24 around the axis 12 causes the wheel 10 to return to the position shown in FIG. 2, where the three wheels 9, 10 and 11 are approximately equidistant and are applied against the rail 8 of the pipe 4.
- the tool is kept in this position by means of two pneumatic pistons, which apply external forces, and the remote manipulator is released so that other tools can be placed on other pipes while the tool referred to here is working.
- programmed control means not shown For loosening the nuts 1 of a flanged connection, programmed control means not shown first start the motor 14, which drives the wheel 11 and rotates the tool around the pipe 4. Microcontacts not shown detect the position of the nut 1 and stop the engine 14, as soon as the axis 7 of a nut coincides with the axis 18 of the key. The support structure 13 is then in position to be lowered on the flange 2.
- the programmed command restarts the cycle by turning the tool in order to align the key 17 with another nut and so on.
- the manipulator is called again to release the tool from the pipe and to apply it if necessary on another pipe.
- the tool's function is similar. Only the direction of rotation of the motor 19 is reversed and the pawls 23 are positioned accordingly. Beforehand, the storage rod 25 is loaded with nuts, which then unload automatically by providing a nut for each screwing. The torque being low at the start, the motor 19 continues to rotate after the engagement of the nut 1 and it is stopped only towards the end of tightening where the torque becomes significant. The final tightening is obtained by the back and forth of the lever 21, the tightening force being able to be adjusted to a desired value by limiting the air pressure supplying the piston 22.
- the tool according to the invention makes it possible, by adequate programming of the control means, to successively process nuts which are not adjacent to the crown of the flange. This is often desired to make the tightening more uniform around the edge of the flange. It is also possible to go through several tightening cycles by increasing the final tightening torque from one cycle to another. The remote manipulator does not intervene until the end of the last cycle.
- the forces used in the various pneumatic motors or pistons are low and that the final tightening torque is produced through a relatively long arm.
- the size of the tool according to the invention is very small, allowing it to be used in the event that its workplace is surrounded by a bundle of other pipes, provided only that there is somewhere to put the semiannular structure on the pipe in question.
- the invention is not limited to the embodiment described above.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- High Energy & Nuclear Physics (AREA)
- Details Of Spanners, Wrenches, And Screw Drivers And Accessories (AREA)
Abstract
Description
- L'invention se réfère à un outil automatique de serrage et de desserrage d'une vis ou d'un écrou appartenent à une connexion à brides entre deux tuyaux, comprenant une clé qui peut être placée sur la tête de la vis ou de l'écrou et qui est entraînée en rotation par un moteur.
- La connexion entre deux brides nécessite le serrage d'un certain nombre de boulons, qui sont répartis régulièrement autour de l'axe des tuyaux et traversent deux brides qui constituent les extrémités de ces tuyaux. En cas d'une ambiance nocive ou radioactive, le serrage des boulons des brides de connexion ne peut plus être effectué manuellement, mais nécessite au contraire le recours à un outil automatique. Jusqu'ici, de tels outils nécessitaient l'assistance continue d'un télémanipulateur, qui rapproche l'outil de la bride, guide la clé de l'outil vers l'écrou à serrer, surveille l'opération de serrage, dégage ensuite la clé de l'écrou pour pouvoir l'engager sur l'écrou suivant de la même connexion à brides et ainsi de suite.
- Cette solution montre plusieurs inconvénients, qui mènent à chercher une solution mieux adaptée. Parmi ces inconvénients, on peut citer, en particulier, le temps d'occupation du télémanipulateur et l'encombrement de l'ensemble constitué par le télémanipulateur et l'outil. Ce dernier point est particulièrement important, lorsque les brides en question ne sont pas accessibles de tous les côtés. Or, l'outil doit pouvoir servir aussi lorsque le tuyau en question est entouré d'autres tuyaux, la distance entre ces tuyaux ne dépassant guère la largeur des brides de connexion.
- L'invention a pour but de proposer un outil automatique tel que défini ci-dessus, qui ne nécessite plus l'assistance par le télémanipulateur une fois qu'il est mis en place sur un tuyau, et qui peut être utilisé même lorsque les tuyaux sont peu accessibles.
- Ce but est atteint par l'outil automatique de serrage et de desserrage, qui est caractérisé selon l'invention par le fait
- que le moteur est monté sur une structure de support ayant une forme semiannulaire, adaptée au diamètre des tuyaux,
- qu'un rail circulaire est fixé autour de l'un des tuyaux à une distance prédéterminée des brides,
- que deux roues susceptibles d'être guidées par ledit rail sont montées, de façon mobile en direction de l'axe des tuyaux, sur un châssis, qui est articulé sur ladite structure,
- qu'une troisième roue susceptible d'être guidée par ledit rail est montée, de façon mobile en direction de l'axe des tuyaux, sur ladite structure, les trois roues étant appliquées contre ledit rail à des angles réguliers lorsque le châssis se trouve dans une position opérative, alors que l'une des roues se dégage du rail lorsque le châssis est escamoté autour de son axe d'articulation,
- que des moyens pneumatiques sont prévus pour déplacer en translation ladite structure de support par rapport aux roues, parallèlement à l'axe des tuyaux,
- qu'un levier d'une forme semiannulaire est articulé sur ladite structure, l'axe de son articulation coincidant avec l'axe de rotation de la clé et une extrémité du levier étant accouplée à un piston pneumatique fixé à ladite surcture dans une zone diamétralement opposée à la clé par rapport à l'axe des tuyaux,
- et que ce levier est couplé en rotation à ladite clé par des systèmes cliquet/rochet reversibles d'anti-retour. - En ce qui concerne des réalisations préférées de l'invention, référence est faite aux sous-revendications.
- L'invention sera décrite ci-après plus en détail à l'aide d'un exemple de réalisation et des dessins annexés.
- Fig. 1 représente une coupe à travers l'outil le long de la ligne A-A de la figure 2 ou de la figure 3.
- Fig. 2 montre une vue sur l'outil selon les flèches B-B de la fig. 1.
- Fig. 3 représente une vue sur l'outil selon les flèches C-C de la fig. 1, un couvercle inférieur ayant été enlevé.
- Fig. 4 montre en coupe un détail de l'outil selon l'invention, la ligne de coupe étant marquée D-D sur la fig. 2.
- L'outil représenté sur les quatre figures sert à serrer des écrous 1, qui traversent deux brides 1 et 3, ces brides constituant les extrémités de deux tuyaux 4 et 5, dont les axes 6 sont alignés.
- L'outil est spécialement conçu pour le diamètre des tuyaux 4 et 5 et le diamètre sur lequel se trouvent les axes 7 des boulons de connexion 26, qui sont solidaires de la bride inférieure. Du côté des tuyaux, la seule adaptatation à cet outil est constituée par un rail de guidage 8, qui est fixé sur la surface extérieure de l'un des tuyaux et qui coopère avec trois roues 9 à 11 de guidage, dont est muni l'outil.
- Sur la fig. 1, l'outil est représenté en position rétractée par rapport aux brides 2 et 3, mais fixé de façon auto-portante au tuyau 4 à travers le rail 8 et les roues 9 à 11. Parmi ces roues, deux, à savoir les roues 9 et 10, sont portées par un châssis commun 24, qui est monté à travers un axe d'articulation 12 sur une structure de support 13 d'une forme générale semiannulaire. La troisième roue 11 est supportée par la structure de support 13 et elle peut être entraînée par un moteur 14, de sorte que la structure de support semiannulaire peut tourner autour de l'axe 6.
- Les axes des trois roues 9, 10, 11 jouent un rôle de glissière pneumatique pour la structure de support 13 de telle sorte que cette dernière puisse être baissée ou montée en direction de l'axe 6 des tuyaux, lorsqu'on applique de l'air sous pression à des cylindres 15 et 20, dans lesquels glissent des pistons tels que 16 solidaires de l'axe de la roue correspondante. La fig. 1 représente la position haute de cette structure de support, position dans laquelle les écrous 1 ne sont pas atteints par l'outil.
- La clé 17 proprement dite est visible sur la fig. 4. Elle est constituée d'un tube de section intérieure hexagonale adaptée à la forme de l'écrou 1. Une tige 25 de stockage d'écrous s'étend le long d'un axe 18. Elle reçoit des écrous desserrés ou elle fournit des écrous qui doivent être serrés sur un boulon 26. Les écrous sont retenus sur cette tige à l'aider de billes telles que 27, qui saillissent légèrement et élastiquement de logements radiaux dans cette tige et qui s'appuient sur des ressorts. Un moteur pneumatique réversible 19 est accouplé à cette clé pour la faire tourner dans le sens de serrrage ou de desserrage.
- Enfin, l'outil comporte un levier 21, qui est articulé autour de l'axe 18. Par son extrémité libre, le levier 21 est accouplé à un piston 22, qui s'appuie contre la structure de support 13. Ce levier enferme la clé et il est accouplé à cette dernière par un système réversible de cliquet et rochet 23. Sur la fig. 3, on ne voit que les rochets d'un sens de rotation, les autres rochets étant cachés derrière le levier.
- Le fonctionnement de cet outil est le suivant :
- Au préalable, un télémanipulateur est employé pour engager l'outil sur le tuyau concerné. Il suffit de présenter la face ouverte de la structure semiannulaire de support au tuyau, le châssis 24 étant escamoté de sorte que la roue 10 ne gêne pas le passage du tuyau 4. La roue 9 par contre se trouve maintenant dans l'espace cylindrique que doit ultérieurement occuper le tuyau. Si le télémanipulateur rapproche l'outil de ce tuyau, ce dernier pousse enfin la roue 9 vers l'arrière et l'articulation du châssis 24 autour de l'axe 12 fait revenir la roue 10 vers la position représentée sur la fig. 2, où les trois roues 9, 10 et 11 sont approximativement équidistantes et s'appliquent contre le rail 8 du tuyau 4.
- L'outil se maintient dans cette position à l'aide de deux pistons pneumatiques, qui appliquent des forces extérieures, et le télémanipulateur est libéré pour pouvoir placer d'autres outils sur d'autres tuyaux pendant que l'outil visé ici travaille.
- Pour le desserrage des écrous 1 d'une connexion à brides, des moyens de commande programmés non représentés mettent d'abord en marche le moteur 14, qui entraîne la roue 11 et fait tourner l'outil autour du tuyau 4. Des microcontacts non représentés détectent la position de l'écrou 1 et arrêtent le moteur 14, dès que l'axe 7 d'un écrou coincide avec l'axe 18 de la clé. La structure de support 13 est alors en position pour être abaissée sur la bride 2.
- Pour cela, on injecte de l'air sous pression dans l'une des cavités des cylindres 15 et 20. Pendant que la structure de support 13 est abaissée sur la bride 2, on met en marche le moteur pneumatique 19 d'entraînement de la clé 17, qui tourne à vitesse réduite. Lorsque le support 13 est en contact avec la bride 2 (signalé par microcontact non représenté), la clé 17 a pris position sur l'écrou 1. Le moteur pneumatique 19 se bloque, n'ayant pas un couple suffisant pour dévisser l'écrou 1. On agit alors de façon répétitive sur le piston 22 pour que le levier 21 parcourt un battement de va-et-vient et agisse à travers le système cliquet/rochet 23 sur la clé en sens de desserrage de l'écrou. Pendant ce temps, la pression sur le moteur 19 maintenue. Après quelques cycles d'actionnement du piston 22, le couple de desserrage est devenu acceptable pour le moteur 19. Le dévissage complet est alors obtenu rapidement et l'écrou devissé prend place automatiquement sur la tige 25. Il est alors possible de relever l'ensemble 13 en agissant sur les pistons 15 et 20.
- Ensuite, la commande programmée recommence le cycle en tournant l'outil en vue d'aligner la clé 17 sur un autre écrou et ainsi de suite. En fin de l'opération, le télémanipulateur est de nouveau appelé pour dégager l'outil du tuyau et pour l'appliquer au besoin sur un autre tuyau.
- Lors du serrage, la fonction de l'outil est similaire. Seul le sens de rotation du moteur 19 est inversé et les cliquets 23 sont positionnés conformément. Au préalable, la tige de stockage 25 est chargée d'écrous, qui se déchargent alors automatiquement en fournissant un écrou à chaque vissage. Le couple de rotation étant faible au départ, le moteur 19 continue à tourner après l'engagement de l'écrou 1 et il est arrêté seulement vers la fin du serrage où le couple devient important. Le serrage final est obtenu par le va-et-vient du levier 21, la force de serrage pouvant être ajustée à une valeur désirée par la limitation de la pression d'air alimentant le piston 22.
- L'outil selon l'invention permet, par une programmation adéquate des moyens de commande, de traiter successivement des écrous qui ne sont pas adjacents sur la couronne de la bride. Cela est souvent désiré pour rendre le serrage plus uniforme sur le pourtour de la bride. Il est également possible de parcourir plusieurs cycles de serrage en augmentant le couple final de serrage d'un cycle à l'autre. Le télémanipulateur n'intervient qu'au bout du dernier cycle.
- Il est à noter que les forces mis en oeuvre dans les différents moteurs ou pistons pneumatiques sont faibles et que le couple de serrage final est produit à travers un bras relativement long. Enfin, il est à noter que l'encombrement de l'outil selon l'invention est très faible, permettant son emploi au cas où son lieu de travail est entouré par un faisceau d'autres tuyaux, à condition seulement qu'il y ait quelque part de la place pour enfiler la structure semiannulaire sur le tuyau en question.
- L'invention n'est pas limitée à l'exemple de réalisation décrit ci-dessus. On peut, en particulier, remplacer les pistons pneumatiques par des vérins hydrauliques ou par des moyens électromécaniques, tels que des vis sans fin entraînées par des moteurs électriques.
Claims (4)
- que le moteur (19) est monté sur une structure de support (13) ayant une forme semiannulaire adaptée au diamètre des tuyaux (4, 5),
- qu'un rail circulaire (8) est fixé autour de l'un des tuyaux (4) à une distance prédéterminée des brides (2, 3),
- que deux roues (9, 10) susceptibles d'être guidées par ledit rail (8) sont montées, de façon mobile en direction de l'axe (6) des tuyaux, sur un châssis (24), qui est articulé sur ladite structure (13),
- qu'une troisième roue (11) susceptible d'être guidée par ledit rail (8) est montée, de façon mobile en direction de l'axe (6) des tuyaux, sur ladite structure (13), les trois roues étant appliqués contre ledit rail à des angles réguliers lorsque le châssis (24) se trouve dans une position opérative, alors que l'une des roues (10) se dégage du rail lorsque le châssis est escamoté autour de son axe (12) d'articulation,
- que des moyens pneumatiques (15, 20) sont prévus pour déplacer en translation ladite structure (13) de support par rapport aux roues, parallèlement à l'axe (6) des tuyaux,
- qu'un levier (21) d'une forme semiannulaire est articulé sur ladite structure, l'axe de son articulation coincidant avec l'axe de rotation (18) de la clé, et une extrémité du levier étant accouplé à un piston pneumatique (22) fixé à ladite structure (13) dans une zone diamétralement opposée à la clé par rapport à l'axe des tuyaux (6),
- et que ce levier (21) est couplé en rotation à ladite clé par des systèmes cliquet/rochet (23) reversibles d'anti-retour.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| LU86415 | 1986-04-30 | ||
| LU86415A LU86415A1 (fr) | 1986-04-30 | 1986-04-30 | Outil automatique de serrage et de desserrage d'une vis d'une connexion a brides entre deux tuyaux |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0243943A1 true EP0243943A1 (fr) | 1987-11-04 |
| EP0243943B1 EP0243943B1 (fr) | 1990-04-04 |
Family
ID=19730690
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP19870106176 Expired - Lifetime EP0243943B1 (fr) | 1986-04-30 | 1987-04-28 | Outil automatique de serrage et de desserrage d'une vis d'une connexion a brides entre deux tuyaux |
Country Status (5)
| Country | Link |
|---|---|
| EP (1) | EP0243943B1 (fr) |
| DE (1) | DE3762099D1 (fr) |
| ES (1) | ES2014273B3 (fr) |
| GR (1) | GR3000557T3 (fr) |
| LU (1) | LU86415A1 (fr) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1995033597A1 (fr) * | 1994-06-07 | 1995-12-14 | Hedley Purvis Limited | Ensemble de montage pour plusieurs dispositifs a boulons |
| GB2324489A (en) * | 1997-04-24 | 1998-10-28 | Allseas Group Sa | Underwater connection of pipe flanges and bolt therefor |
| CN102380764A (zh) * | 2010-09-03 | 2012-03-21 | 烟台宝钢钢管有限责任公司 | 气囊式钢管保护环拧接机 |
| CN108127010A (zh) * | 2018-02-06 | 2018-06-08 | 湖南拯卫建设科技有限公司 | 管体旋拧设备 |
| CN110948216A (zh) * | 2019-12-30 | 2020-04-03 | 核动力运行研究所 | 一种主泵电机支撑把合螺栓的螺母自动拆装工具及方法 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115127793B (zh) * | 2022-06-20 | 2025-02-14 | 四川航天长征装备制造有限公司 | 一种手动铠装波纹管摇摆性能测试装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR1304256A (fr) * | 1961-10-20 | 1962-09-21 | Euratom | Assemblages à brides étanches aux fluides, et procédé pour les réaliser à distance |
| FR1419167A (fr) * | 1964-12-28 | 1965-11-26 | Skil Corp | Accessoire de décalage d'entraînement pour les outils comportant un organe rotatifd'entraînement |
| FR1543960A (fr) * | 1967-05-24 | 1968-10-31 | Commissariat Energie Atomique | Dispositif d'assemblage télémanipulable |
| DE2026257A1 (de) * | 1969-07-18 | 1971-01-28 | Biach, John Louis, Cranford, N J (V St A) | Vorrichtung zur Ausübung eines Dreh momentes, insbesondere zum Festziehen oder Losen einer Schraubverbindung |
| DE2230955A1 (de) * | 1972-06-23 | 1974-01-10 | Nsw Corp | Verfahren und vorrichtung zum drehen eines verbindungselementes |
-
1986
- 1986-04-30 LU LU86415A patent/LU86415A1/fr unknown
-
1987
- 1987-04-28 ES ES87106176T patent/ES2014273B3/es not_active Expired - Lifetime
- 1987-04-28 DE DE8787106176T patent/DE3762099D1/de not_active Expired - Lifetime
- 1987-04-28 EP EP19870106176 patent/EP0243943B1/fr not_active Expired - Lifetime
-
1990
- 1990-06-13 GR GR90400375T patent/GR3000557T3/el unknown
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR1304256A (fr) * | 1961-10-20 | 1962-09-21 | Euratom | Assemblages à brides étanches aux fluides, et procédé pour les réaliser à distance |
| FR1419167A (fr) * | 1964-12-28 | 1965-11-26 | Skil Corp | Accessoire de décalage d'entraînement pour les outils comportant un organe rotatifd'entraînement |
| FR1543960A (fr) * | 1967-05-24 | 1968-10-31 | Commissariat Energie Atomique | Dispositif d'assemblage télémanipulable |
| DE2026257A1 (de) * | 1969-07-18 | 1971-01-28 | Biach, John Louis, Cranford, N J (V St A) | Vorrichtung zur Ausübung eines Dreh momentes, insbesondere zum Festziehen oder Losen einer Schraubverbindung |
| DE2230955A1 (de) * | 1972-06-23 | 1974-01-10 | Nsw Corp | Verfahren und vorrichtung zum drehen eines verbindungselementes |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1995033597A1 (fr) * | 1994-06-07 | 1995-12-14 | Hedley Purvis Limited | Ensemble de montage pour plusieurs dispositifs a boulons |
| GB2324489A (en) * | 1997-04-24 | 1998-10-28 | Allseas Group Sa | Underwater connection of pipe flanges and bolt therefor |
| GB2324489B (en) * | 1997-04-24 | 2002-03-13 | Allseas Group Sa | Method and apparatus for underwater connection of pipe pieces and bolt therefor |
| CN102380764A (zh) * | 2010-09-03 | 2012-03-21 | 烟台宝钢钢管有限责任公司 | 气囊式钢管保护环拧接机 |
| CN102380764B (zh) * | 2010-09-03 | 2013-06-26 | 烟台宝钢钢管有限责任公司 | 气囊式钢管保护环拧接机 |
| CN108127010A (zh) * | 2018-02-06 | 2018-06-08 | 湖南拯卫建设科技有限公司 | 管体旋拧设备 |
| CN110948216A (zh) * | 2019-12-30 | 2020-04-03 | 核动力运行研究所 | 一种主泵电机支撑把合螺栓的螺母自动拆装工具及方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| LU86415A1 (fr) | 1987-06-02 |
| DE3762099D1 (de) | 1990-05-10 |
| EP0243943B1 (fr) | 1990-04-04 |
| ES2014273B3 (es) | 1990-07-01 |
| GR3000557T3 (en) | 1991-07-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3539685B1 (fr) | Outillage et procede de pose d'une fixation aveugle | |
| EP0299880B1 (fr) | Compresseur de ressorts hélicoidaux | |
| FR2475688A1 (fr) | Dispositif d'effacement, (ou de mise en retrait) de bras de machines d'insertion | |
| EP0360711A1 (fr) | Dispositif pour l'accouplement des platines porte-éléments des raccords multiples | |
| EP0243943B1 (fr) | Outil automatique de serrage et de desserrage d'une vis d'une connexion a brides entre deux tuyaux | |
| FR2886184A1 (fr) | Structure de serrage destinee a un outil emmanche | |
| WO2001098196A1 (fr) | Broche de vissage | |
| FR2687343A1 (fr) | Dispositif de desserrage ou de serrage d'un ecrou visse sur un organe filete. | |
| EP0186537A1 (fr) | Frein à disque | |
| EP0491627A2 (fr) | Outil de déréglage d'un levier de frein auto-régleur | |
| BE1007526A3 (fr) | Cle de serrage. | |
| EP3412523B1 (fr) | Sous-ensemble de timonerie et timonerie maintenus dans une position de transport à l aide d'un élément de blocage, et procédé de blocage de cette timonerie à l aide d'un tel élément de blocage | |
| FR2489735A1 (fr) | Dispositif destine a serrer les assemblages a gros filetages | |
| EP2221494A1 (fr) | Dispositif de fixation d'un palier radial d'un arbre de transmission d'un véhicule | |
| EP0243218B1 (fr) | Dispositif de positionnement pour le vissage et le dévissage d'un écrou | |
| FR2660886A1 (fr) | Dispositif de prehension d'organes, notamment outil de pose de rivets. | |
| EP0226933B1 (fr) | Outil de serrage/desserrage d'une connexion de tubes | |
| FR2520654A1 (fr) | Outillage pour le vissage ou le devissage de pieces difficilement accessibles | |
| FR2879836A1 (fr) | Dispositif et procede de mise a la masse d'un fil electrique sur une structure metallique, notamment un carter en aluminium pour vehicule automobile | |
| FR3110104A1 (fr) | dispositif d’interface pour bras rotatif robotisé , procédé de commande , dispositif d’intervention | |
| EP1746301A1 (fr) | Etrier de frein à disque électromécanique | |
| FR2771667A3 (fr) | Cle a douille a cliquet | |
| FR2720845A1 (fr) | Vis de réglage. | |
| EP0974423B1 (fr) | Dispositif d'arrimage entre un dispositif d'entraínement et un outil, notamment un outil de finissage pour lentille ophtalmique, et procédé pour sa mise en oeuvre | |
| BE1014382A5 (fr) | Mandrin de retenue pour le serrage d'un tube de verre. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): BE DE ES FR GB GR IT LU NL |
|
| 17P | Request for examination filed |
Effective date: 19880504 |
|
| 17Q | First examination report despatched |
Effective date: 19890714 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): BE DE ES FR GB GR IT LU NL |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) | ||
| REF | Corresponds to: |
Ref document number: 3762099 Country of ref document: DE Date of ref document: 19900510 |
|
| ITF | It: translation for a ep patent filed | ||
| REG | Reference to a national code |
Ref country code: GR Ref legal event code: FG4A Free format text: 3000557 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 19910227 Year of fee payment: 5 |
|
| 26N | No opposition filed | ||
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: LU Payment date: 19910328 Year of fee payment: 5 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: BE Payment date: 19910402 Year of fee payment: 5 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 19910411 Year of fee payment: 5 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 19910426 Year of fee payment: 5 |
|
| ITTA | It: last paid annual fee | ||
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 19910430 Year of fee payment: 5 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 19910617 Year of fee payment: 5 |
|
| EPTA | Lu: last paid annual fee | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19920428 Ref country code: GB Effective date: 19920428 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19920429 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Effective date: 19920430 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GR Payment date: 19920624 Year of fee payment: 6 |
|
| BERE | Be: lapsed |
Owner name: COMMUNAUTE EUROPEENNE DE L'ENERGIE ATOMIQUE EURAT Effective date: 19920430 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Effective date: 19921101 |
|
| NLV4 | Nl: lapsed or anulled due to non-payment of the annual fee | ||
| GBPC | Gb: european patent ceased through non-payment of renewal fee | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Effective date: 19921230 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Effective date: 19930101 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: THE PATENT HAS BEEN ANNULLED BY A DECISION OF A NATIONAL AUTHORITY Effective date: 19931031 |
|
| REG | Reference to a national code |
Ref country code: GR Ref legal event code: MM2A Free format text: 3000557 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 19990301 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20050428 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19900430 |