EP0263979A1 - Installation pour briqueter la paroi intérieur d'une enceinte - Google Patents
Installation pour briqueter la paroi intérieur d'une enceinte Download PDFInfo
- Publication number
- EP0263979A1 EP0263979A1 EP87113282A EP87113282A EP0263979A1 EP 0263979 A1 EP0263979 A1 EP 0263979A1 EP 87113282 A EP87113282 A EP 87113282A EP 87113282 A EP87113282 A EP 87113282A EP 0263979 A1 EP0263979 A1 EP 0263979A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- bricks
- platform
- barrel
- robot
- plate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000009434 installation Methods 0.000 title claims description 31
- 239000011449 brick Substances 0.000 claims abstract description 58
- 238000012544 monitoring process Methods 0.000 claims abstract description 5
- 230000008901 benefit Effects 0.000 description 8
- 238000000605 extraction Methods 0.000 description 2
- 235000004522 Pentaglottis sempervirens Nutrition 0.000 description 1
- 210000004027 cell Anatomy 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000005192 partition Methods 0.000 description 1
Images


Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F27—FURNACES; KILNS; OVENS; RETORTS
- F27D—DETAILS OR ACCESSORIES OF FURNACES, KILNS, OVENS OR RETORTS, IN SO FAR AS THEY ARE OF KINDS OCCURRING IN MORE THAN ONE KIND OF FURNACE
- F27D1/00—Casings; Linings; Walls; Roofs
- F27D1/16—Making or repairing linings ; Increasing the durability of linings; Breaking away linings
- F27D1/1621—Making linings by using shaped elements, e.g. bricks
-
- C—CHEMISTRY; METALLURGY
- C21—METALLURGY OF IRON
- C21C—PROCESSING OF PIG-IRON, e.g. REFINING, MANUFACTURE OF WROUGHT-IRON OR STEEL; TREATMENT IN MOLTEN STATE OF FERROUS ALLOYS
- C21C5/00—Manufacture of carbon-steel, e.g. plain mild steel, medium carbon steel or cast steel or stainless steel
- C21C5/28—Manufacture of steel in the converter
- C21C5/42—Constructional features of converters
- C21C5/44—Refractory linings
- C21C5/441—Equipment used for making or repairing linings
Definitions
- the present invention relates to an installation for briquetting the inner wall of an enclosure essentially consisting of an operating station capable of being moved vertically along the axis of the enclosure and comprising a rotary working platform, a tray of non-rotating support carrying the platform by means of a bearing, a robot for laying bricks, a surveillance cabin, means for raising and lowering pallets of bricks, as well as at least one automatic depalletization of the bricks to transfer the bricks from the pallets to a waiting station.
- Installations with external depalletization have the advantage of reducing the size of the platform, which is to the benefit of the possibility of being able to install on the platform a comfortable monitoring cabin and thus contribute to safety personnel monitoring the briquetting of the enclosure wall.
- Another advantage of these installations is the possibility of being able to use standard robots, that is to say robots which do not have to be specially designed for the tasks for which they are intended.
- these installations require sophisticated hoists and complex programs to bring, as desired, the two types of bricks on the platform at the rate of work of the robot which performs their laying.
- the object of the present invention is to provide a new robotic installation of the kind described in the preamble which combines the advantages of installations with depalletization inside and the advantages of those with depalletization outside.
- the present invention provides an installation of the type described in the preamble which is essentially characterized in that the waiting station comprises a barrel which can contain a reserve of bricks of different types and supported by the plate by means of a bearing so as to be able to rotate independently of the plate and of the platform around the vertical axis of the enclosure.
- this barrel is mounted between the plate and the platform whose surface is entirely closed, with the exception of at least one preferably radial window allowing the passage of a brick.
- the barrel is preferably made up of an inclined annular ramp divided into individual inclined compartments to each contain at least one brick which is deposited therein by the automatic depalletization machine (s).
- Each of these barrel compartments is accessible to the robot through the radial window of the platform and thanks to the rotation of the barrel.
- a device for extracting bricks from the barrel through the window of the platform this device being disposed on this platform next to said window and accessible to the robot arm.
- the support plate is preferably provided with two winches for raising and lowering two pallets, while the depalletization is carried out by two automata integral with the support plate.
- the installation proposed by the present invention is therefore an intermediate solution between depalletization installations outside and depalletization installations on the platform.
- depalletization is carried out neither outside nor on the platform, but on the freight elevator, for example by leaving the pallets hanging on the cables of their winches which are used to mount the pallets to the operating station. Since the depalletization is no longer carried out on the platform, there remains on it only the robot for laying the bricks, the surveillance booth and the window for the passage of the bricks. The problem of the space taken up by the working platform, which was all the more thorny the smaller the briquetting chambers, was therefore satisfactorily resolved.
- the bricks being presented individually or in pairs superimposed and always in the same position to the robot which has the space necessary to perform its movements, it can be a completely classic robot, while up to now it was necessary to design a robot specially adapted to the space available on the platform.
- the barrel is preferably designed to contain a sufficient reserve of bricks of each of the two types to allow the robot to continue its work while an empty pallet is replaced by a full pallet. The downtime required for pallet changes is therefore reduced or completely eliminated.
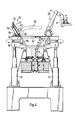
- the installation shown in FIG. 1 comprises an operating station 10 carried by several, for example three telescopic masts 12 by which the operating station 10 can be moved vertically inside an enclosure not shown, for example a metallurgical converter of which the refractory lining must be replaced.
- the operating station 10 is constituted by a support plate 14 carried directly by the masts 12 and which support, by means of a bearing 18, a working platform 16.
- This platform 16 can therefore rotate independently of the tray 14 around the vertical axis, which is symbolized by the arrow A.
- This rotation of the platform 16 allows a robot 20 mounted on this platform 16 to reach the entire circumference of the enclosure.
- the rotation of the platform 16 is carried out in a manner known per se, for example by means of an electric stepping motor, not shown but which can be fixed on the plate 14 and the control of which is controlled by the work program of the robot 20.
- the robot 20 can be a conventional robot with several arms hinged together and provided with a certain number of degrees of freedom of rotation and pivoting symbolized by the arrows in FIG. 1.
- the free robot end 20 is provided with a device 22 for gripping bricks.
- This device 22 can be constituted, in a manner known per se, by a suction cup or a clamp, the latter having the advantage of being able to grip two superimposed bricks at the same time.
- a pair of cables 30, 32 wound respectively around two pulleys 26, 28, fixed by means of yokes below the plate 14 allow the raising and lowering of brick pallets 34 and 36.
- these pallets 34 and 36 remain attached to the cables 30 and 32.
- the depalletization is carried out using two depalletization machines 38 and 40 integral with the base of the plate 14. These machines being identical to each other, the description given below with reference to the machine 40 will be worth also for the automaton 38.
- This automaton 40 is mounted on a jack 42 capable of rotating around a vertical axis (symbolized by the arrow B) and whose piston rod 44 is shown in solid lines in the retracted position and in broken lines in the released position.
- an arm 46 At the end of this rod 44 is mounted an arm 46 which can pivot about a horizontal axis by relative to the rod 44, which is illustrated by the arrow C. This pivoting can, for example, be generated by an electric motor.
- a gripping device 48 is slidably mounted on this arm 46 and can be moved along it, in the direction of arrow D by means of a jack 50 also fixed on the end of the piston rod 44.
- the gripping device 48 may comprise a suction cup or a clamp for gripping the bricks on the pallet 36, this clamp or suction cup being, moreover, designed so as to be able to rotate around a vertical axis as represented by the arrow E.
- the different degrees of freedom of the depalletizing machine 40 represented by the arrows B to E in the figure allow the machine to grasp each of the bricks of a layer on the pallet 36.
- the pallet 36 To access after exhaustion of one layer to the bottom layer on the pallet 36, it suffices to mount the pallet 36 by means of the cable 32 of a height corresponding to a layer of bricks, or of two bricks if the gripping device 48 is provided with a clamp capable of grab two overlapping bricks at the same time time.
- the bricks depalletized by the automata 38 and 40 are deposited in a tank which, in the example shown, consists of a rotary barrel which can rotate around the vertical axis of the installation and mounted for this purpose on the plate 14 by means of a bearing 54.
- the rotation of the barrel 52 is preferably derived from a stepping electric motor, which is controlled by the operating program of the robot 20 and those of automata 38 and 40.
- the barrel 52 consists of an annular ramp 56, inclined outward to generally present the shape of a frustoconical surface, the virtual point of which is found below.
- the ramp 56 of the barrel 52 the details of which emerge more clearly from the fragmentary view of FIG.
- the barrel 52 is accessible to the robot 20 through a substantially rectangular radial window 66 provided in the working platform 16. During its rotation, this barrel 52 has its different compartments 60 with the bricks 62 individually below the window 66 to the robot 20. The rotation of the barrel 52 is controlled by the work program of the robot 20 so that it is stopped when a filled compartment is located below the window 66 and that it is the compartment containing the type of bricks 62 which the robot 20 needs.
- the reference 68 schematically symbolizes a surveillance cabin installed on the platform 16.
- the surface of the platform 16 is, outside of this cabin 68 and of the robot 20 completely free, which allows the latter to '' perform free its movements without being hindered, as in prior art installations, by cables, pallets, or depalletizing devices.
- the clearance of the surface of the platform 16 also facilitates the work of monitoring and control and contributes to the safety of the personnel. In this context, it is possible to provide a hatch next to the window 66 to close the latter during maintenance and control work.
- FIGS. 4 and 5 While in the embodiment illustrated in FIGS. 1 and 2, the robot 20 is used directly on the barrel 52, the embodiment represented in FIGS. 4 and 5 has a device 70 for extracting the bricks from the barrel 52.
- This extraction device 70 which is mounted on the platform 16 next to the window 66 comprises a clamp 72 mounted on the rod of a jack 74 itself mounted so as to be able to perform a back-and-forth movement. comes in the extension of the oblique ramp 56.
- the jack 74 is fixed on an endless band 76 actuated by an electric motor 78.
- the band 76 further comprises a hook 80 for retaining the bricks 62 released from the barrel 52 after their release from the clamp 72 and before being taken up by the robot 20.
- the installation of FIG. 4 corresponds to that of FIG. 1 and operates in the same way.
- the operating station 10 is mounted at the working height of the robot 20 by extension of the telescopic masts 12.
- the pallets 34 and 36 are replaced by full pallets as they are empty by means of cables 30 and 32 and winches not shown. It is recalled that it is always necessary to have two pallets containing different types of bricks, that is to say bricks distinguished by their conicity in order to be able to follow the curvature of the enclosure and to make masonry of different rays.
- the two depalletizing machines 38 and 40 are controlled as a function of the reserve of bricks of each of the types in the barrel 52 in order to have therein a reserve of bricks of each type to allow the robot 20 to continue working while replacing a pallet.
- automata 38 and 40 shown in FIGS. 1 and 4 are only an example of an embodiment and that other devices can be provided for transferring the bricks from each of the pallets 34 and 36 in the barrel 52.
- the ramp 56 of the barrel 52 could also be inclined inward instead of being inclined outward as in Figures 1 and 4.
- the bricks would be deposited on the outer conical or frustoconical surface of the ramp of the barrel.
- the two depalletizing machines would then not be placed between the two pallets, but on either side of them, while the cables for raising and lowering the pallets would pass in the central region between them.
- the barrel 52 could also be consisting of an annular disc with compartments in which the bricks are arranged flat. Such a barrel would however be more cumbersome in the horizontal direction, but take up less space in the vertical direction.
- each of these windows would be reserved for the extraction of a defined type of bricks.
- the two windows would be particularly useful for the variants with double barrel described above.
- the robot would still be on the rotating platform, while the barrel with the reserve of bricks and in which the robot is used would be mounted, by means of a bearing on the lower surface of the plate.
- the barrel could also consist of an annular ramp, preferably inclined inwards and carrying the reserve bricks in compartments on the outer conical surface.
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Manufacturing & Machinery (AREA)
- Materials Engineering (AREA)
- Metallurgy (AREA)
- Organic Chemistry (AREA)
- Furnace Housings, Linings, Walls, And Ceilings (AREA)
- Carbon Steel Or Casting Steel Manufacturing (AREA)
- Road Signs Or Road Markings (AREA)
- Devices For Post-Treatments, Processing, Supply, Discharge, And Other Processes (AREA)
- Cultivation Receptacles Or Flower-Pots, Or Pots For Seedlings (AREA)
- Finishing Walls (AREA)
- Control Of Vending Devices And Auxiliary Devices For Vending Devices (AREA)
- Measurement Of Radiation (AREA)
- External Artificial Organs (AREA)
Abstract
Description
- La présente invention concerne une installation pour briqueter la paroi intérieure d'une enceinte constituée essentiellement d'un poste opératif susceptible d'etre déplacé verticalement le long de l'axe de l'enceinte et comprenant une plate-forme de travail rotative, un plateau de support non rotatif portant la plate-forme par l'intermédiaire d'un roulement, un robot pour la pose des briques, une cabine de surveillance , des moyens pour monter et descendre des palettes de briques , ainsi qu'au moins un automate de dépalettisation des briques pour transférer les briques des palettes vers un poste d'attente.
- Diverses installations robotisées , notamment pour la pose d'un garnissage réfractaire d'un convertisseur, ont été proposées récemment. Parmi ces installations on peut distinquer essentiellement deux types , à savoir celles dans lesquelles la dépalettisation des briques est effectuée à l'intérieur de l'enceinte comme dans la demande de brevet luxembourgeois no. 86 114 et celles dans lesquelles la dépalettisation est effectuée à l'extérieur de l'enceinte comme celle proposée par la demande de brevet luxembourgeois no. 86 382. Chacune de ces installations possède ses avantages propres. Ainsi par exemple, les installations avec dépalettisation à l'intérieur de l'enceinte ont l'avantage d'une exécution relativement rapide, car , outre les temps morts relativement courts nécessaires au changement des palettes, les deux types de briques nécessaires sont disponibles en permanence sur la plate-forme de travail.
- Les installations avec dépalettisation extérieure ont l'avantage d'une réduction de l'encombrement de la plate-forme, ce qui est au bénéfice de la possibilité de pouvoir installer sur la plate-forme une cabine de surveillance confortable et contribuer ainsi à la sécurité du personnel assurant la surveillance du briquetage de la paroi de l'enceinte. Un autre avantage de ces installations est la possibilité de pouvoir utiliser des robots standards, c'est-à-dire des robots qui ne doivent pas être conçus spécialement pour les tâches auxquelles ils sont destinés. Malheureusement, ces installations nécessitent des monte-charge sophistiqués et des programmes complexes pour amener, au choix, les deux types de briques sur la plate-forme à la cadence de travail du robot qui exécute leur pose.
- Le but de la présente invention est de prévoir une nouvelle installation robotisée du genre décrit dans le préambule qui réunit les avantages des installations avec dépalettisation à l'intérieur et les avantages de celles avec dépalettisation à l'extérieur.
- Pour atteindre cet objectif, la présente invention prévoit une installation du genre décrit dans le préambule qui est essentiellement caractérisée en ce que le poste d'attente comporte un barillet pouvant contenir une réserve de briques de différents types et supporté par le plateau au moyen d'un roulement de manière à pouvoir tourner indépendamment du plateau et de la plate-forme autour de l'axe vertical de l'enceinte.
- Selon un mode de réalisation,ce barillet est monté entre le plateau et la plate-forme dont la surface est entièrement fermée , à l'exception d'au moins une fenêtre de preference radiale permettant le passage d'une brique.
- Le barillet est, de préférence, constitué d'une rampe annulaire inclinée divisée en compartiments inclinés individuels pour contenir chacun au moins une brique qui y est déposée par le ou les automates de dépallettisation. Chacun de ces compartiments du barillet est accessible au robot à travers la fenêtre radiale de la plate-forme et grâce à la rotation du barillet.
- Dans un autre mode de réalisation, il est prévu un dispositif d'extraction des briques du barillet à travers la fenêtre de la plate-forme , ce dispositif étant disposé sur cette plate-forme à côté de ladite fenêtre et accessible au bras du robot.
- Le plateau de support est, de préférence, pourvu de deux treuils pour monter et descendre deux palettes, tandis que la dépalettisation est effectuée par deux automates solidaires du plateau de support.
- L'installation proposée par la présente invention est par conséquent une solution intermédiaire entre les installations à dépalettisation à l'extérieur et celles à dépalettisation sur la plate-forme. En effet, dans l'installation proposée, la dépalettisation est réalisée ni à l'extérieur, ni sur la plate-forme , mais sur le monte-charge, par exemple en laissant les palettes accrochées aux câbles de leurs treuils qui servent à monter les palettes jusqu'au poste opératif. Etant donné que la dépalettisation n'est plus effectuée sur la plate-forme, il ne reste sur celle-ci que le robot pour la pose des briques, la cabine de surveillance et la fenêtre pour le passage des briques. Le problème de l'encombrement de la plate-forme de travail, qui était d'autant plus épineux que les enceintes à briqueter étaient petites, a donc été résolu de façon satisfaisante. En outre, les briques étant présentées individuellement ou par couples superposés et toujours dans la même position au robot qui dispose de l'espace nécessaire pour effectuer ses mouvements, celui-ci peut être un robot tout-à-fait classique , alors que jusqu'à présent il était nécessaire de concevoir un robot spécialement adapté à la place disponible sur la plate-forme.
- Le barillet est, de préférence, conçu pour contenir une réserve suffisante de briques de chacun des deux types pour permettre au robot de poursuivre son travail pendant qu'une palette vide est remplacée par une palette pleine. Les temps morts nécessaires aux changements des palettes sont, par conséquent, réduits ou complètement éliminés.
- D'autres particularités et caractéristiques de l'invention ressortiront de la description détaillée de quelques modes de réalisation présentés , ci-dessous, à titre d'illustration , en référence aux dessins annexés dans lesquels :
- la figure 1 montre une vue schématique d'un premier mode de réalisation d'une installation selon la présente invention ;
- la figure 2 montre une vue plongeante sur la plate-forme de travail ;
- la figure 3 montre une section du barillet avec des briques de réserve et
- les figures 4 et 5 montrent un deuxième mode de réalisation par des vues correspondant respectivement à celles des figures 1 et2.
- L'installation représentée sur la figure 1 comporte un poste opératif 10 porté par plusieurs, par exemple trois mâts téléscopiques 12 grâce auxquels le poste opératif 10 est déplaçable verticalement à l'intérieur d'une enceinte non représentée, par exemple d'un convertisseur métallurgique dont il faut remplacer le garnissage réfractaire.
- Le poste opératif 10 est constitué par un plateau de support 14 porté directement par les mâts 12 et qui supportent , par l'intermédiaire d'un roulement 18 , une plate-forme de travail 16. Cette plate-forme 16 peut donc tourner indépendamment du plateau 14 autour de l'axe vertical, ce qui est symbolisé par la flèche A. Cette rotation de la plate-forme 16 permet à un robot 20 monté sur cette plate-forme 16 d'atteindre toute la circonférence de l'enceinte. La rotation de la plate-forme 16 est réalisée de manière connue en soi, par exemple au moyen d'un moteur électrique pas à pas, non représenté mais pouvant être fixé sur le plateau 14 et dont la commande est asservie au programme de travail du robot 20.
- Le robot 20 peut être un robot classique à plusieurs bras articulés entre eux et pourvu d'un certain nombre de degrés de liberté de rotation et de pivotement symbolisés par les flèches sur la figure 1. L'extrémité libre robot 20 est pourvue d'un dispositif 22 de préhension de briques. Ce dispositif 22 peut êntre constitué , de manière connue en soi, par une ventouse ou un e pince , celle-ci ayant l'avantage de pouvoir saisir en même temps deux briques superposées.
- Une paire de câbles 30, 32 enroulés respectivement autour de deux poulies 26, 28, fixées par l'intermédiaire de chapes en-dessous du plateau 14 permettent la montée et la descente de palettes de briques 34 et 36. Dans la position de dépalettisation, comme représenté sur la figure 1, ces palettes 34 et 36 restent accrochées aux câbles 30 et 32. Toutefois, pour assurer une meilleure stabilité de ces palettes 34 et 36 lors de la dépalettisation, il est possible de prévoir au niveau de la dépalettisation deux cages fixes, reliées au plateau 14 et dans lesquelles les palettes pénètrent lorsqu'elles arrivent dans la position de dépalettisation.
- La dépalettisation est effectuée à l'aide de deux automates de dépalettisation 38 et 40 solidaires de la base du plateau 14. Ces automates étant identiques l'un à l'autre, la description donnée ci-dessous en référence à l'automate 40 vaudra également pour l'automate 38. Cet automate 40 est monté sur un vérin 42 susceptible de tourner autour d'un axe vertical (symbolisé par la flèche B) et dont la tige de piston 44 est représentée en traits pleins dans la position rétractée et en traits interrompus dans la position dégagée. A l'extrémité de cette tige 44 est monté un bras 46 pouvant pivoter autour d'un axe horizontal par rapport à la tige 44, ce qui est illustré par la flèche C. Ce pivotement peut , par exemple, être engendré par un moteur électrique. Un dispositif de préhension 48 est monté de façon coulissante sur ce bras 46 et peut être déplacé le long de celui-ci , dans le sens de la flèche D au moyen d'un vérin 50 également fixé sur l'extrémité de la tige de piston 44. Le dispositif de préhension 48 peut comporter une ventouse ou une pince pour saisir les briques sur la palette 36, cette pince ou ventouse étant, en outre, conçue de manière à pouvoir tourner autour d'un axe vertical comme représenté par la flèche E. Les différents degrés de liberté de l'automate de dépalettisation 40, représentés par les flèches B à E sur la figure permettent à l'automate de saisir chacune des briques d'une couche sur la palette 36. Pour accéder après épuisement d'une couche à la couche inférieure sur la palette 36, il suffit de monter la palette 36 au moyen du câble 32 d'une hauteur correspondant à une couche de briques , ou de deux briques si le dispositif de préhension 48 est pourvu d'une pince pouvant saisir deux briques superposées en même temps.
- Selon l'une des particularités de l'installation, les briques dépalettisées par les automates 38 et 40 sont déposées dans un réservoir qui, dans l'exemple représenté, est constitué par un barillet rotatif pouvant tourner autour de l'axe vertical de l'installation et monté à cet effet sur le plateau 14 par l'intermédiaire d'un roulement 54. La rotation du barillet 52 dérive, de préférence, d'un moteur électrique pas à pas, qui est asservi au programme de fonctionnement du robot 20 et ceux des automates 38 et 40. Dans le mode de réalisation représenté, le barillet 52 est constitué d'une rampe annulaire 56 , inclinée vers l'extérieur pour présenter globalement la forme d'une surface tronconique, dont la pointe virtuelle se trouve en-dessous. La rampe 56 du barillet 52, dont les détails ressortent plus clairement de la vue fragmentaire de la figure 3, possède un rebord inférieur 64 de retenue des briques et des cloisons transversales 58 définissant entre elles des compartiments 60 pouvant recevoir chacun une brique 62. La région médiane de la rampe 56 et de chacun des compartiments 60 est de préférence ouvert provoquant ainsi la chute automatique des briques cassées hors du barillet 50 et rendant ainsi superflu un contrôle pour répérer les briques cassées.
- Comme le montre la figure 2, le barillet 52 est accessible au robot 20 à travers une fenêtre radiale 66 sensiblement rectangulaire prévue dans la plate-forme de travail 16. Lors de sa rotation , ce barillet 52 présente ses différent s compartiments 60 avec les briques 62 individuellement en-dessous de la fenêtre 66 au robot 20. La rotation du barillet 52 est asservie au programme de travail du robot 20 de telle manière qu'il soit stoppé lorsqu'un compartiment rempli se trouve en-dessous de la fenêtre 66 et qu'il s'agit du compartiment renfermant le type de briques 62 dont le robot 20 a besoin. La référence 68 symbolise schématiquement une cabine de surveillance installée sur la plate-forme 16. On notera que la surface de la plate-forme 16 est, en dehors de cette cabine 68 et du robot 20 complètement dégagée, ce qui permet à ce dernier d'effectuer libre ment ses mouvements sans être gêné , comme dans les installations de l'état de la technique , par des câbles, des palettes, ou des dispositifs de dépalettisation. Le dégagement de la surface de la plate-forme 16 facilite également le travail de surveillance et de contrôle et contribue à la sécurité du personnel. Dans ce contexte, il est possible de prévoir une trappe à côté de la fenêtre 66 pour fermer celle-ci lors des travaux d'entretien et de contrôle.
- Alors que dans le mode de réalisation illustré sur les figures 1 et 2, le robot 20 se sert directement sur le barillet 52, le mode de réalisation représenté sur les figures 4 et 5 possède un dispositif 70 d'extraction des briques du barillet 52. Ce dispositif d'extraction 70 qui est monté sur la plate-forme 16 à côté de la fenêtre 66 comporte une pince 72 montée sur la tige d'un vérin 74 lui-même monté de façon à pouvoir effectuer un mouvement de va-et-vient dans la prolongation de la rampe oblique 56. Dans le mode de réalisation représenté, le vérin 74 est fixé sur une bande sans fin 76 actionnée par un moteur électrique 78. La bande 76 comporte , en outre, un crochet 80 pour retenir les briques 62 dégagées du barillet 52 après leur libération de la pince 72 et avant la prise par le robot 20. Pour le reste, l'installation de la figure 4 correspond à celle de la figure 1 et fonctionne de la même manière.
- Lors du briquetage de la paroi intérieure d'une enceinte , le poste opératif 10 est monté à la hauteur de travail du robot 20 par extension des mâts téléscopiques 12. Les palettes 34 et 36 sont remplacées par des palettes pleines au fur et à mesure qu'elles sont vides au moyen des câbles 30 et 32 et de treuils non représentés. Il est rappelé qu'il est toujours nécessaire de disposer de deux palettes contenant des types différents de briques, c'est-à-dire des briques se distinguant par leur conicité afin de pouvoir suivre la courbure de l'enceinte et de réaliser des maçonneries de différents rayons. A cet effet, les deux automates de dépalettisation 38 et 40 sont commandés en fonction de la réserve de briques de chacun des types dans le barillet 52 afin de disposer dans celui-ci d'une réserve de briques de chaque type pour permettre au robot 20 de poursuivre son travail pendant le remplacement d'une palette.
- Il est à noter que les automates 38 et 40 représentés sur les figures 1 et 4, ne constituent qu'un exemple de réalisation et que l'on peut prévoir d'autres dispositifs pour transférer les briques de chacune des palettes 34 et 36 dans le barillet 52.
- La rampe 56 du barillet 52 pourrait également être inclinée vers l'intérieur au lieu d'être inclinée vers l'extérieur comme sur les figures 1 et 4. Dans ce cas, les briques seraient déposées sur la surface conique ou tronconique extérieure de la rampe du barillet. Les deux automates de dépalettisation seraient alors non pas disposés entre les deux palettes, mais de part et d'autre de celles-ci , tandis que les câbles pour la montée et descente des palettes passeraient dans la région centrale entre celles-ci.
- Au lieu d'être constitué par une rampe annulaire inclinée, le barillet 52 pourrait également être constitué par un disque annulaire avec des compartiments dans lesquels les briques sont disposées à plat. Un tel barillet serait toutefois plus encombrant dans le sens horizontal , mais occuper ait moins de place dans le sens vertical.
- Au lieu de prévoir un seul barillet comme sur les figures 1 et 4, il est également possible de prévoir deux barillet indépendant , à rampe annulaire inclinée, l'une dans le prolongement de l'autre, recevant chacune un type bien déterminé de briques. Une autre variante consiste à prévoir une rampe 56 du barillet 52 suffisamment haute pour définir deux rangées annulaires de compartiments pouvant recevoir chacun un type déterminé de briques. Toutes ces variantes augmentent, bien entendu, la capacité du barillet 52 et réduisent davantage ou annulent les temps morts nécessaires au changement des palettes.
- Au lieu de prévoir une seule fenêtre 66 dans la plate-forme 16 pour l'extraction des briques du barillet 52, il est possible d'en prévoir deux, c'est-à-dire que chacune de ces fenêtres serait réservée à l'extraction d'un type défini de briques. Les deux fenêtres seraient notamment utiles pour les variantes à double barillet décrites ci-dessus.
- Il reste finalement à souligner que les deux modes de réalisation décrits ci-dessus en référence aux figures conviennent pour la réfection des enceintes ou convertisseurs à fond ouvert ou à fond amovible. Il est toutefois possible, sans sortir du cadre de l'invention d'adapter ces modes de réalisation de manière à pouvoir travailler dans des enceintes à fond fermé , c'est-à- dire de concevoir l'installation de telle manière que le poste opératif soit suspendu dans l'enceinte. A cet effet, il suffit de disposer la plate-forme rotative en-dessous du plateau de support , à une certaine distance de celui-ci. La dépalettisation serait alors effectuée sur le plateau qui serait supporté par des câbles en remplacement des mâts téléscopiques des modes de réalisation décrits ci-dessus. Le robot se trouverait toujours sur la plate-forme rotative, alors que le barillet avec la réserve de briques et dans lequel se sert le robot serait monté, par l'intermédiaire d'un roulement à la surface inférieure du plateau. Le barillet pourrait également être constitué par une rampe annulaire , de préférence inclinée vers l'intérieur et portant les briques de réserve dans des compartiments sur la surface conique extérieure.
Claims (7)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| AT87113282T ATE57540T1 (de) | 1986-10-03 | 1987-09-11 | Anlage zum ausmauern der innenwand eines gefaesses. |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| LU86619A LU86619A1 (fr) | 1986-10-03 | 1986-10-03 | |
| LU86619 | 1986-10-03 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0263979A1 true EP0263979A1 (fr) | 1988-04-20 |
| EP0263979B1 EP0263979B1 (fr) | 1990-10-17 |
Family
ID=19730789
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP87113282A Expired - Lifetime EP0263979B1 (fr) | 1986-10-03 | 1987-09-11 | Installation pour briqueter la paroi intérieur d'une enceinte |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US4787796A (fr) |
| EP (1) | EP0263979B1 (fr) |
| JP (1) | JP2584244B2 (fr) |
| AT (1) | ATE57540T1 (fr) |
| BR (1) | BR8705191A (fr) |
| CA (1) | CA1296523C (fr) |
| DE (1) | DE3765612D1 (fr) |
| ES (1) | ES2018804B3 (fr) |
| LU (1) | LU86619A1 (fr) |
| TR (1) | TR23013A (fr) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2638774A1 (fr) * | 1988-11-09 | 1990-05-11 | Wurth Paul Sa | Installation automatisee pour la pose d'une maconnerie sur une paroi |
| CN108999419A (zh) * | 2018-08-16 | 2018-12-14 | 杨华 | 一种用于建筑砌墙用的缓冲限位装置 |
| CN111794527A (zh) * | 2020-06-10 | 2020-10-20 | 中国建筑股份有限公司 | 钢桁架支座卸载结构及利用该结构进行轨道卸载的工法 |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| LU88144A1 (fr) * | 1992-07-07 | 1994-04-01 | Wurth Paul Sa | Installation pour garnir d'une maçonnerie de briques une paroi intérieure d'une enceinte |
| FI941274A0 (fi) * | 1994-03-17 | 1994-03-17 | Jukka Inkeroinen | Foerfarande och anordning foer montering av laettelement |
| AUPQ525500A0 (en) * | 2000-01-25 | 2000-02-17 | Technological Resources Pty Limited | A method of relining a vessel |
| US8965571B2 (en) | 2010-08-12 | 2015-02-24 | Construction Robotics, Llc | Brick laying system |
| ITUA20164508A1 (it) * | 2016-06-20 | 2017-12-20 | Frignano Servizi S R L A Capitale Ridotto | Attrezzatura per la posa di manufatti ceramici, in particolare piastrelle di grande formato |
| GB201712164D0 (en) * | 2017-07-28 | 2017-09-13 | Construction Automation Ltd | Automated brick laying system and method of use thereof |
| WO2020139556A1 (fr) * | 2018-12-26 | 2020-07-02 | Exxonmobil Research And Engineering Company | Inspection, retrait et installation à distance de réfractaire |
| US20240417985A1 (en) * | 2023-06-19 | 2024-12-19 | Obshchestvo s ogranichennoi otvetstvennostiu «Diginavis» | Device and method for erecting structures using building blocks |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR1325256A (fr) * | 1962-05-21 | 1963-04-26 | Hwm Weh Maschf Hermann | Procédé pour le garnissage des appareils destinés à la fabrication, le traitement, la conservation ou le transport des masses métalliques fondues ou des produits analogues |
| EP0220543A1 (fr) * | 1985-10-10 | 1987-05-06 | Paul Wurth S.A. | Installation pour briqueter la paroi intérieure d'une enceinte |
| EP0226075A1 (fr) * | 1985-12-03 | 1987-06-24 | Paul Wurth S.A. | Installation automatisée de briquetage de la paroi intérieure d'une enceinte |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE1154131B (de) * | 1961-05-20 | 1963-09-12 | Hwm Weh Maschf Hermann | Vorrichtung zum Herstellen einer aus Formbloecken bestehenden Auskleidung von Behaeltern, insbesondere Konvertern, die Metallschmelzen aufnehmen |
| SU508529A1 (ru) * | 1974-04-16 | 1976-03-30 | Предприятие П/Я Г-4448 | Машина дл футеровки конвертера |
-
1986
- 1986-10-03 LU LU86619A patent/LU86619A1/xx unknown
-
1987
- 1987-08-28 CA CA000545659A patent/CA1296523C/fr not_active Expired - Lifetime
- 1987-09-11 ES ES87113282T patent/ES2018804B3/es not_active Expired - Lifetime
- 1987-09-11 AT AT87113282T patent/ATE57540T1/de not_active IP Right Cessation
- 1987-09-11 EP EP87113282A patent/EP0263979B1/fr not_active Expired - Lifetime
- 1987-09-11 DE DE8787113282T patent/DE3765612D1/de not_active Expired - Lifetime
- 1987-09-16 BR BR8705191A patent/BR8705191A/pt not_active IP Right Cessation
- 1987-09-17 JP JP62233592A patent/JP2584244B2/ja not_active Expired - Lifetime
- 1987-09-17 TR TR644/87A patent/TR23013A/xx unknown
- 1987-10-02 US US07/104,313 patent/US4787796A/en not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR1325256A (fr) * | 1962-05-21 | 1963-04-26 | Hwm Weh Maschf Hermann | Procédé pour le garnissage des appareils destinés à la fabrication, le traitement, la conservation ou le transport des masses métalliques fondues ou des produits analogues |
| EP0220543A1 (fr) * | 1985-10-10 | 1987-05-06 | Paul Wurth S.A. | Installation pour briqueter la paroi intérieure d'une enceinte |
| EP0226075A1 (fr) * | 1985-12-03 | 1987-06-24 | Paul Wurth S.A. | Installation automatisée de briquetage de la paroi intérieure d'une enceinte |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2638774A1 (fr) * | 1988-11-09 | 1990-05-11 | Wurth Paul Sa | Installation automatisee pour la pose d'une maconnerie sur une paroi |
| BE1003577A3 (fr) * | 1988-11-09 | 1992-04-28 | Wurth Paul Sa | Installation automatisee pour la pose d'une maconnerie sur une paroi. |
| CN108999419A (zh) * | 2018-08-16 | 2018-12-14 | 杨华 | 一种用于建筑砌墙用的缓冲限位装置 |
| CN111794527A (zh) * | 2020-06-10 | 2020-10-20 | 中国建筑股份有限公司 | 钢桁架支座卸载结构及利用该结构进行轨道卸载的工法 |
Also Published As
| Publication number | Publication date |
|---|---|
| ES2018804B3 (es) | 1991-05-16 |
| US4787796A (en) | 1988-11-29 |
| CA1296523C (fr) | 1992-03-03 |
| ATE57540T1 (de) | 1990-11-15 |
| TR23013A (tr) | 1989-01-16 |
| JPS6391485A (ja) | 1988-04-22 |
| DE3765612D1 (de) | 1990-11-22 |
| LU86619A1 (fr) | 1988-05-03 |
| JP2584244B2 (ja) | 1997-02-26 |
| EP0263979B1 (fr) | 1990-10-17 |
| BR8705191A (pt) | 1988-05-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| BE1003577A3 (fr) | Installation automatisee pour la pose d'une maconnerie sur une paroi. | |
| EP0263979B1 (fr) | Installation pour briqueter la paroi intérieur d'une enceinte | |
| EP0230593B1 (fr) | Installation automatisée pour briqueter la paroi intérieure d'une enceinte | |
| EP0220543B1 (fr) | Installation pour briqueter la paroi intérieure d'une enceinte | |
| BE1006857A3 (fr) | Installation pour garnir d'une maconnerie de briques une paroi interieure d'une enceinte. | |
| BE1000471A4 (fr) | Installation pour briqueter la paroi interieure d'une enceinte. | |
| FR2649966A1 (fr) | Dispositif motorise de rotation de charge, auto-alimente en energie, pour appareils de levage a cable | |
| FR2467465A1 (fr) | Machine de rechargement pour un reacteur nucleaire | |
| EP0198267B1 (fr) | Installation pour la pose d'un garnissage réfractaire sur la paroi intérieure d'une enceinte | |
| EP0226075B1 (fr) | Installation automatisée de briquetage de la paroi intérieure d'une enceinte | |
| EP0248251B1 (fr) | Installation automatisée pour briqueter la paroi intérieure d'une enceinte | |
| FR2770927A1 (fr) | Machine de chargement pour deplacer des objets oblongs etroitement voisins, notamment des assemblages combustibles | |
| FR2510981A1 (fr) | Equipement pour la manutention automatique et le stockage de futs | |
| EP2761061B1 (fr) | Module de service compact et son utilisation dans une usine de production d'aluminium par electrolyse | |
| FR2610235A1 (fr) | Appareil de transport et de manutention de charges, comprenant un chariot sans conducteur a fourche de levage | |
| SU1217727A1 (ru) | Устройство дл разгрузки контейнеров | |
| EP0115978B1 (fr) | Machine pour la fermeture de fûts à l'intérieur d'une piscine et couvercle de fût prévu pour être mis en place à l'aide d'une telle machine | |
| FR2545800A1 (fr) | Machine pour transferer des bouteilles tete-beche entre un conteneur et un entassement de bouteilles dans un volume limite d'une cave | |
| FR2669312A1 (fr) | Magasin de stockage automatique. | |
| EP0329527A1 (fr) | Dispositif de pose et de dépose des outils d'une brocheuse verticale | |
| EP0335959B1 (fr) | Dispositif de graphitage du col dans les cones de tubes cathodiques | |
| CH717343A2 (fr) | Chargeur pour donner et/ou prendre des objets à une machine et installation comprenant ce chargeur. | |
| FR2899133A1 (fr) | Dispositif pour charger avec menagement des tambours de machines | |
| FR2651206A1 (fr) | Machine d'emballage et de deballage de recipients. | |
| EP0277373A1 (fr) | Installation d'extraction d'eau de fils en bobines |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE DE ES FR GB IT NL SE |
|
| 17P | Request for examination filed |
Effective date: 19880722 |
|
| 17Q | First examination report despatched |
Effective date: 19891227 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE DE ES FR GB IT NL SE |
|
| REF | Corresponds to: |
Ref document number: 57540 Country of ref document: AT Date of ref document: 19901115 Kind code of ref document: T |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) | ||
| REF | Corresponds to: |
Ref document number: 3765612 Country of ref document: DE Date of ref document: 19901122 |
|
| ITF | It: translation for a ep patent filed | ||
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| ITTA | It: last paid annual fee | ||
| 26N | No opposition filed | ||
| EAL | Se: european patent in force in sweden |
Ref document number: 87113282.5 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 19960820 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 19960830 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 19960911 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 19960912 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 19960923 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 19960930 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: BE Payment date: 19961003 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 19970814 Year of fee payment: 11 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19970911 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19970912 Ref country code: ES Free format text: LAPSE BECAUSE OF THE APPLICANT RENOUNCES Effective date: 19970912 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: THE PATENT HAS BEEN ANNULLED BY A DECISION OF A NATIONAL AUTHORITY Effective date: 19970930 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19970930 |
|
| BERE | Be: lapsed |
Owner name: S.A. ARBED Effective date: 19970930 Owner name: S.A. PAUL WURTH Effective date: 19970930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19980401 |
|
| NLV4 | Nl: lapsed or anulled due to non-payment of the annual fee |
Effective date: 19980401 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19980603 |
|
| EUG | Se: european patent has lapsed |
Ref document number: 87113282.5 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19980911 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 19980911 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20001009 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES;WARNING: LAPSES OF ITALIAN PATENTS WITH EFFECTIVE DATE BEFORE 2007 MAY HAVE OCCURRED AT ANY TIME BEFORE 2007. THE CORRECT EFFECTIVE DATE MAY BE DIFFERENT FROM THE ONE RECORDED. Effective date: 20050911 |