EP0335800A1 - Engin de ramassage et de chargement en continu de matériaux - Google Patents
Engin de ramassage et de chargement en continu de matériaux Download PDFInfo
- Publication number
- EP0335800A1 EP0335800A1 EP89400879A EP89400879A EP0335800A1 EP 0335800 A1 EP0335800 A1 EP 0335800A1 EP 89400879 A EP89400879 A EP 89400879A EP 89400879 A EP89400879 A EP 89400879A EP 0335800 A1 EP0335800 A1 EP 0335800A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- frame
- rotor
- bucket
- loading
- materials
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 239000000463 material Substances 0.000 title claims abstract description 29
- 230000000694 effects Effects 0.000 claims description 4
- 239000000109 continuous material Substances 0.000 claims description 2
- 229910000831 Steel Inorganic materials 0.000 claims 1
- 239000010959 steel Substances 0.000 claims 1
- 210000000056 organ Anatomy 0.000 description 2
- 238000011084 recovery Methods 0.000 description 2
- 238000009412 basement excavation Methods 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 238000006731 degradation reaction Methods 0.000 description 1
- 238000003197 gene knockdown Methods 0.000 description 1
- 238000004064 recycling Methods 0.000 description 1
- 230000009747 swallowing Effects 0.000 description 1
Images

Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/76—Graders, bulldozers, or the like with scraper plates or ploughshare-like elements; Levelling scarifying devices
- E02F3/78—Graders, bulldozers, or the like with scraper plates or ploughshare-like elements; Levelling scarifying devices with rotating digging elements
- E02F3/783—Graders, bulldozers, or the like with scraper plates or ploughshare-like elements; Levelling scarifying devices with rotating digging elements having a horizontal axis of rotation
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F7/00—Equipment for conveying or separating excavated material
- E02F7/02—Conveying equipment mounted on a dredger
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/08—Superstructures; Supports for superstructures
- E02F9/0808—Improving mounting or assembling, e.g. frame elements, disposition of all the components on the superstructures
Definitions
- the present invention relates to a continuous material pickup and loading machine, more particularly suitable for picking up materials from the shoulders of roads.
- the present invention provides a machine which makes it possible to carry out the collection and loading of materials on the shoulder of the roadways, in a continuous manner unlike a mechanical shovel which can only advance in stages.
- the pickup device is adapted to position itself directly on the shoulder of the roadway and therefore it does not obstruct traffic.
- the truck receiving the load of materials can also position itself by biting on the shoulder, behind the pickup machine.
- the collection device according to the invention also has the advantage of directly performing all the finishing operations, that is to say that behind its passage, the site does not require any additional operation.
- Another advantage of the machine according to the invention lies in the possibility of using it for simultaneous digging operations, continuous collection by means of particularly suitable means.
- Document US-A-3,982,340 presents a loader excavator which comprises, at the front, two excavator wheels arranged on half-axles which extend to the right and to the left of a central load-bearing casing. At the rear of these excavating wheels, there is the transport device which evacuates the debris towards the rear of the machine.
- the excavating wheels work by pushing the materials away, while the machine according to the invention works by swallowing to facilitate in particular the collection of the materials.
- the document US Pat. No. 3,651,588 also presents a machine which is used for digging a pavement for example and for leveling at the same time.
- This machine consists of a crawler train which supports a frame on which is mounted, from front to back, a digging head, a first conveyor belt which pours the cuttings onto a second orientable belt.
- the frame still supports the engine components and the operator's cabin.
- the digging head has a scraper blade and two worms to refocus the product in front of the main conveyor belt. These screws are equipped, at their periphery, with teeth which knock down the ground by pushing up the debris.
- the frame is articulated and guided on the crawler train to allow adjustment of the digging head.
- Such a machine is primarily intended for digging.
- the direction of rotation of the screws does not allow a simple operation of collecting debris of any kind.
- the articulation system of the frame on the undercarriage does not have a character of rigidity comparable to that of the machine according to the invention, which makes it particularly difficult to handle.
- the subject of the invention is a machine of the self-propelled type by a train of tracks or wheels, which is surmounted by a chassis comprising, from front to back: - a pickup head consisting of a bucket provided with a blade transverse to its lower part and also a transverse rotor, which has propellers for centering the materials; - a lifting belt extending behind the bucket; - an adjustable distributor belt, placed downstream of the lifting belt.
- the machine comprises, interposed between the track train, or wheels, and the support frame of the pickup and loading means, a joint of the universal type consisting of a frame positioned in the frame of the train of caterpillars; this frame is articulated along a longitudinal central axis of roll on the frame of the crawler train; it is movable under the effect of at least one jack interposed between it and said train of tracks; moreover, the support frame of the pick-up and loading means is articulated along a transverse pitch axis on said frame; it is movable by means of at least one jack interposed between it and said frame to adjust the height of the pickup head relative to the ground.
- the propeller rotor arranged in the bucket comprises perforating teeth regularly distributed around the periphery of said rotor. These teeth are positioned so as to strike the tips on the materials to be degraded, that is to say that they are centered on an axis which forms an open angle relative to the tangent at the periphery of the rotor.
- the rotor consists of at least two reverse-direction propellers to center the product in front of the lifting belt; these propellers are separated by a space of between 10 and 20 cm, in front of the entry of said belt, and a deflector is positioned between the hub of said rotor and the upper part of said entry in the median plane of this entry, perpendicular to the 'axis of rotation of the rotor, centered in the space in question between the central ends of said propellers.
- the lower end of the deflector is guided on the hub of the rotor, by means of a wear ring, so as to better resist the efforts, and to rid the propellers, stones and the like. debris, to prevent clogging of the central part of the rotor.
- the bucket is articulated on the axis of the input roller of the main lifting belt; it is movable under the effect of at least one jack so as to vary the angle of attack of the teeth of the rotor relative to the position of the blade disposed at the entrance to the bucket.
- the pick-up head is offset laterally, for example on the right side of the machine, so as to improve the recovery capacity on the sides of the roads for example without encroaching on the latter.
- the distributor belt is articulated on a vertical pivot axis allowing an angular movement at least equal to 180 °.
- the support of the distributor belt is mounted on guides sliding in a substantially vertical manner, at the rear of the chassis, so as to allow in particular a folding of said belt for transport.
- the machine comprises a crawler train 1 secured to a frame 2, which frame supports, by means of an intermediate frame 3, a frame 4 on which are arranged in particular the pickup and loading means materials.
- These collection and loading means consist, from front to rear, of a bucket 5, arranged transversely, comprising at its lower part, a scraper blade 6.
- This bucket 5 contains a rotor 7 responsible in particular for refocusing the materials and propel them onto the lifting belt 8.
- This main lifting belt 8 comprises an input roller 9 disposed behind the bucket 5, at its bottom, and an output roller 10 disposed at the rear top part of the chassis 4, above the entrance of a carpet. distributor 11.
- the lateral structures of the mat 8 are not shown in the figures; they are integral with the chassis 4.
- the distributor belt 11 is mounted on a support 12 by means of a hinge pin 13 arranged vertically, so as to allow an orientation of said distributor belt 11 over a sector of at least 180 °.
- the support 12 of the distributor belt 11 is mounted on guides 14, which guides slide on arms 15 arranged at the rear of the chassis 4. These arms 15 are arranged either vertically or, as shown, slightly inclined towards the 'back. Their role is to allow movement of the support 12 of the distributor belt 11 from the top to the bottom, in particular to make it possible to raise said belt 11 and thus reduce the total size of the machine during transport.
- the belt 11 is raised by means of a jack 16 interposed between the turret 17 which serves as a pivoting support said mat and the side structure, not shown, which guides said mat.
- the movement of the support 12 of the mat 11 takes place by means of lateral jacks 18, visible in FIG. 2, interposed between the chassis 4 and the guides 14.
- the frame 4 supports the drive member 19 disposed under the carpet 8 and the driver's cabin 20 located at the front, above the pickup head.
- the bucket 5 supports the rotor 7 by means of two lateral arms 21.
- the rotor 7 is driven by means of at least one hydraulic motor 22 secured to one of the arms 21.
- the scraper blade 6 is located under the bucket, parallel and slightly behind the axis 23 of the rotor 7. Behind the blade 6, in the bucket, there is a curved wall 24 for guiding the materials up to the entrance of the lifting belt 8.
- the bucket 5 is arranged in front of the lifting belt 8, articulated, by means of the yokes 5 a , on the axis 25 of the input roller 9 of said carpet 8.
- This bucket 5 is movable relative to the chassis 4 by means of at least one actuator 26 positioned between a yoke 27 disposed under the cabin 20 on the chassis 4, and a yoke 28 disposed at the top of said bucket 5.
- the rotor 7 works downstream; it has at its periphery teeth 29 which protrude so as to carry out digging and degradation of the materials; the direction of rotation of the rotor is indicated by an arrow, figure 1bis.
- teeth 29 appear in detail in Figure 1bis. They are mounted on a support 30 fixed on the rotor and they have a body whose general shape is cylindrical and whose axis 31 makes an angle A relative to the tangent 32 between 30 and 60 °, preferably close to 45 °.
- Adjusting the position of the bucket by means of the jack 26 makes it possible to modify the depth of attack of the teeth 29 relative to the scraper blade 6.
- the rotor 7 appears in FIG. 2. It is made up propellers which allow a refocusing of the materials towards the entry 33 of the lifting belt 8. These propellers 34 are for example four in number, two with a step to the right and two with a step to the left, and they have at their periphery , the teeth 29 detailed in FIG. 1a. In the central part of the rotor, a space of about 10 to 20 cm has been preserved between the ends of the propellers 34. These propellers can also be offset angularly on the rotor so that their central ends do not match, as shown in the figure 2; these ends can be in concordance and form a funnel.
- this deflector 36 is to facilitate the feeding of the lifting belt 8 and in particular to prevent recycling from the front of the debris. Indeed, taking into account the direction of rotation of the propellers, stones or others can become immobilized in the central part of the rotor and harm the refocusing and the evacuation of debris.
- the deflector 36 overcomes this drawback and permanently clears the rotor by guiding the products towards the inlet 33 of the lifting belt 8.
- FIG 4 the deflector arm 36 interposed between the rotor 7 and in particular its hub 37 and the upper part 38 of the inlet of the lifting belt 8.
- This deflector arm 36 is in the form of a flat section rectangular, the lower end of which is guided on the hub 37 by means of a crown 39.
- This crown 39 is a wear crown on which the end 40 of the deflector 36 can rub.
- This deflector 36 is guided laterally on the crown by two wedges 41 welded at its end 40. The deflector 36 can thus bear on the hub 37 and collect significant forces when it comes, for example, to extract stones blocked between the propellers 34.
- the rotor 7 can play different roles. In the raised position, the rotor 7 has only a simple role of refocusing the materials towards the inlet 33 of the lifting belt 8; in the fully lowered position, the rotor 7 always ensures the refocusing of the materials towards the inlet 33 of the lifting belt 8 but in addition, by means of its teeth 29, it performs a real digging operation over a height which may be of the order from 10 cm to 40 cm.
- a universal type joint comprising an intermediate frame 3, FIG. 3 is interposed between the chassis 4 and the frame 2 of the track train. 3.
- This intermediate frame 3 is inserted into the frame 2 of the crawler train; it is articulated along a longitudinal axis 45 which corresponds to the roll axis of the machine and which is located in the median plane 35.
- This roll movement is controlled by means of a jack 46 interposed between a yoke 47 arranged in a lateral corner of the frame 3 and a bracket 48 secured to the frame 2.
- the chassis 4 is articulated on the frame 3 around a transverse axis 49 of pitch.
- This axis 49 is located at the rear of the frame 3; the connection between the frame 3 and the frame 4 takes place by means of the yokes 50 and 51 arranged respectively on said frame 3 and said frame 4.
- the pitching movement of the chassis 4 is controlled by means of at least one jack 52 arranged at the front part of the frame 3, and preferably by means of two jacks 52 arranged laterally in the corners of said frame 3.
- the frame 3 is inserted into the frame 2 and it is notably supported by the front crosspieces 53 and rear 54 of said frame; the roll axis 45 being located substantially at the center of said crosspieces 53 and 54.
Landscapes
- Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Mechanical Engineering (AREA)
- Ship Loading And Unloading (AREA)
- Handcart (AREA)
Abstract
L'engin automoteur de ramassage et de chargement en continu de matériaux comporte un train de chenilles (1) surmonté d'un châssis (4) comprenant, d'avant en arrière :
- une tête de ramassage constituée d'un godet (5) muni d'une lame racleuse transversale (6) et d'un rotor transversal (7) à hélices de centrage des matériaux ;
- un tapis élévateur (8) s'étendant derrière ledit godet (5) ;
- un tapis distributeur (11) orientable, s'étendant en aval dudit tapis élévateur (8) ; selon l'invention, il comporte également, entre le châssis (4) et le train de chenilles (1), un joint du type universel en forme de cadre inséré dans le bâti (2) du train de chenilles (1).
- une tête de ramassage constituée d'un godet (5) muni d'une lame racleuse transversale (6) et d'un rotor transversal (7) à hélices de centrage des matériaux ;
- un tapis élévateur (8) s'étendant derrière ledit godet (5) ;
- un tapis distributeur (11) orientable, s'étendant en aval dudit tapis élévateur (8) ; selon l'invention, il comporte également, entre le châssis (4) et le train de chenilles (1), un joint du type universel en forme de cadre inséré dans le bâti (2) du train de chenilles (1).
Le rotor (7) comporte, à sa périphérie, des dents (29) et il coopère avec un déflecteur (36) de débourrage des hélices (34) dudit rotor.
Description
- La présente invention concerne un engin de ramassage et de chargement en continu de matériaux, plus particulièrement adapté à la reprise de matériaux sur l'accotement des routes.
- Dans la pratique, la reprise des matériaux de toute sorte sur l'accotement des routes, est effectuée soit manuellement, soit au moyen d'une pelle mécanique. Ces travaux sont généralement assez longs et, lorsqu'on utilise une pelle mécanique, l'état du chantier nécessite bien souvent des travaux complémentaires de remise en état et de finition.
- La présente invention propose un engin qui permet d'effectuer le ramassage et le chargement des matériaux sur l'accotement des chaussées, d'une manière continue à l'inverse d'une pelle mécanique qui ne peut qu'avancer par étape.
- Par ailleurs, lorsqu'on utilise une pelle mécanique, celle-ci se situe le plus souvent sur la chaussée, de même que le camion qui reçoit les matériaux.
- L'engin de ramassage selon l'invention est adapté pour se positionner directement sur l'accotement de la chaussée et de ce fait, il n'entrave pas la circulation. De la même façon, le camion qui reçoit le chargement de matériaux peut se positionner lui aussi en mordant sur l'accotement, derrière l'engin de ramassage.
- L'engin de ramassage selon l'invention présente encore l'avantage d'effectuer directement toutes les opérations de finition, c'est-à-dire que derrière son passage, le chantier ne nécessite aucune opération complémentaire.
- Un autre avantage de l'engin selon l'invention réside dans la possibilité de l'utiliser pour des opérations simultanées de creusage, ramassage en continu grâce à des moyens particulièrement adaptés.
- Des machines de ce type, c'est-à-dire excavatrices, sont décrites par exemple, dans les documents US-A-3 982 340 et 3 651 588.
- Ces machines sont tout d'abord des machines excavatrices, c'est-à-dire qu'elles effectuent une opération de défonçage ; les débris d'excavation sont évacués par l'arrière de la machine, au moyen de tapis transporteurs.
- Le document US-A-3 982 340 présente une excavatrice chargeuse qui comporte, à l'avant, deux roues excavatrices disposées sur des demi-essieux qui s'étendent à droite et à gauche d'un carter central porteur. A l'arrière de ces roues excavatrices, on trouve le dispositif transporteur qui évacue les débris vers l'arrière de la machine.
- Une telle machine ne comporte pas de châssis intermédiaire entre le train de roues ou de chenilles et le système excavateur. Les travaux sont de ce fait peu précis.
- Par ailleurs, les roues excavatrices travaillent en repoussant les matériaux, alors que la machine selon l'invention travaille en avalant pour faciliter notamment le ramassage des matériaux.
- Le document US-A-3 651 588 présente également une machine qui sert à creuser une chaussée par exemple et à niveler en même temps. Cette machine est constituée d'un train de chenilles qui supporte un bâti sur lequel est monté, d'avant en arrière, une tête de creusage, un premier tapis transporteur qui déverse les déblais sur un second tapis orientable. Le bâti supporte encore les organes moteurs et la cabine de l'opérateur.
- La tête de creusage comporte une lame racleuse et deux vis sans fin de recentrage du produit devant le tapis transporteur principal. Ces vis sont équipées, à leur périphérie, de dents qui défoncent le sol en repoussant vers le haut les débris.
- Le bâti est articulé et guidé sur le train de chenilles pour permettre un réglage de la tête de creusage.
- Une telle machine est d'abord destinée au creusage. Le sens de rotation des vis ne permet pas d'effectuer une simple opération de ramassage de débris de toute sorte.
- Par ailleurs, le système d'articulation du bâti sur le train de chenilles, ne présente pas un caractère de rigidité comparable à celui de la machine selon l'invention, ce qui rend notamment plus délicat sa manipulation.
- L'invention a pour objet un engin du type automoteur par un train de chenilles ou de roues, qui est surmonté d'un châssis comprenant, d'avant en arrière : - une tête de ramassage constituée d'un godet muni d'une lame transversale à sa partie inférieure et d'un rotor transversal également, qui comporte des hélices de centrage des matériaux ;
- un tapis élévateur s'étendant derrière le godet ;
- un tapis distributeur orientable, disposé en aval du tapis élévateur. Selon l'invention, l'engin comporte, interposé entre le train de chenilles, ou de roues, et le châssis support des moyens de ramassage et de chargement, un joint du type universel constitué d'un cadre positionné dans le bâti du train de chenilles ; ce cadre est articulé selon un axe médian longitudinal de roulis sur le bâti du train de chenilles ; il est mobile sous l'effet d'au moins un vérin interposé entre lui et ledit train de chenilles ; par ailleurs, le châssis support des moyens de ramassage et de chargement, est articulé selon un axe transversal de tangage sur ledit cadre; il est mobile au moyen d'au moins un vérin interposé entre lui et ledit cadre pour régler la hauteur de la tête de ramassage par rapport au sol. - Selon une autre disposition de l'invention, le rotor à hélices disposé dans le godet, comporte des dents perforatrices régulièrement réparties à la périphérie dudit rotor. Ces dents sont positionnées de façon à faire frapper les pointes sur les matériaux à dégrader, c'est-à-dire qu'elles sont centrées sur un axe qui forme un angle ouvert par rapport à la tangente à la périphérie du rotor.
- Le rotor est constitué d'au moins deux hélices à sens inversé pour recentrer le produit devant le tapis élévateur ; ces hélices sont séparées d'un espace compris entre 10 et 20 cm, devant l'entrée dudit tapis, et un déflecteur est positionné entre le moyeu dudit rotor et la partie supérieure de ladite entrée dans le plan médian de cette entrée, perpendiculaire à l'axe de rotation du rotor, centré dans l'espace en question entre les extrémités centrales desdites hélices.
- Selon une disposition préférentielle de l'invention, l'extrémité inférieure du déflecteur est guidée sur le moyeu du rotor, au moyen d'une couronne d'usure, de façon à mieux résister aux efforts, et débarrasser les hélices, des pierres et autres débris, pour éviter le colmatage de la partie centrale du rotor.
- Toujours selon l'invention, le godet est articulé sur l'axe du rouleau d'entrée du tapis élévateur principal ; il est mobile sous l'effet d'au moins un vérin de façon à faire varier l'angle d'attaque des dents du rotor par rapport à la position de la lame disposée à l'entrée du godet.
- Selon une autre disposition de l'invention, la tête de ramassage est décalée latéralement, par exemple du côté droit de l'engin, de façon à améliorer la capacité de reprise sur les côtés des chaussées par exemple sans empiéter sur ces dernières.
- Toujours selon l'invention, le tapis distributeur est articulé sur un axe de pivotement vertical autorisant un mouvement angulaire au moins égal à 180°.
- Selon une autre disposition, le support du tapis distributeur est monté sur des guides coulissant de façon sensiblement verticale, à l'arrière du châssis, de façon à permettre notamment un repliement dudit tapis pour le transport.
- L'invention sera encore illustrée par la description suivante et les dessins annexés, donnés à titre indicatif, et dans lesquels :
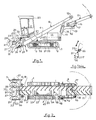
- - la figure 1 est une vue schématique de l'engin en coupe longitudinale, montrant les principaux organes ;
- - la figure 1bis représente en détail une dent montée sur rotor ;
- - la figure 2 est une vue de dessus, avec des demi-coupes longitudinales partielles montrant les principaux éléments constitutifs de l'engin ;
- - la figure 3 est une vue en perspective du bâti principal du train de chenilles montrant le cadre qui sert de joint universel ;
- - la figure 4 représente, de façon plus détaillée, le déflecteur central ;
- - la figure 5 est une vue selon 5-5 de la figure 4.
- Tel que représenté figure 1, l'engin comporte un train de chenilles 1 solidaire d'un bâti 2, lequel bâti supporte, au moyen d'un cadre intermédiaire 3, un châssis 4 sur lequel sont disposés notamment les moyens de ramassage et de chargement des matériaux.
- Ces moyens de ramassage et de chargement sont constitués, d'avant en arrière, d'un godet 5, disposé transversalement, comportant à sa partie inférieure, une lame racleuse 6. Ce godet 5 renferme un rotor 7 chargé en particulier, de recentrer les matériaux et de les propulser sur le tapis élévateur 8.
- Ce tapis élévateur principal 8 comporte un rouleau d'entrée 9 disposé derrière le godet 5, à sa partie basse, et un rouleau de sortie 10 disposé à la partie haute arrière du châssis 4, au-dessus de l'entrée d'un tapis distributeur 11. Les structures latérales du tapis 8 ne sont pas représentées sur les figures ; elles sont solidaires du châssis 4.
- Le tapis distributeur 11 est monté sur un support 12 par l'intermédiaire d'un axe d'articulation 13 disposé verticalement, de façon à permettre une orientation dudit tapis distributeur 11 sur un secteur d'au moins 180°.
- On remarque encore que le support 12 du tapis distributeur 11 est monté sur des guides 14, lesquels guides coulissent sur des bras 15 disposés à l'arrière du châssis 4. Ces bras 15 sont disposés soit verticalement soit, comme représentés, légèrement inclinés vers l'arrière. Ils ont pour rôle de permettre un déplacement du support 12 du tapis distributeur 11 du haut vers le bas, pour permettre notamment, de relever ledit tapis 11 et de réduire ainsi l'encombrement total de l'engin lors du transport. Le relevage du tapis 11 s'effectue au moyen d'un vérin 16 interposé entre la tourelle 17 qui sert de support pivotant audit tapis et la structure latérale, non représentée, qui guide ledit tapis.
- Le mouvement du support 12 du tapis 11 s'effectue au moyen de vérins latéraux 18, visibles figure 2, interposés entre le châssis 4 et les guides 14.
- On remarque encore, figure 1, que le châssis 4 supporte l'organe moteur 19 disposé sous le tapis 8 et la cabine de conduite 20 située à l'avant, au-dessus de la tête de ramassage.
- Le godet 5 supporte le rotor 7 au moyen de deux bras latéraux 21. L'entraînement du rotor 7 s'effectue au moyen d'au moins un moteur hydraulique 22 solidaire de l'un des bras 21. La lame racleuse 6 se situe sous le godet, parallèle et légèrement en arrière de l'axe 23 du rotor 7. Derrière la lame 6, dans le godet, on trouve une paroi incurvée 24 de guidage des matériaux jusqu'à l'entrée du tapis élévateur 8.
- Le godet 5 est disposé devant le tapis élévateur 8, articulé, au moyen des chapes 5a, sur l'axe 25 du rouleau d'entrée 9 dudit tapis 8. Ce godet 5 est mobile par rapport au châssis 4 au moyen d'au moins un vérin 26 positionné entre une chape 27 disposée sous la cabine 20 sur le châssis 4, et une chape 28 disposée à la partie supérieure dudit godet 5.
- Le rotor 7 travaille en avalant ; il comporte à sa périphérie des dents 29 qui débordent de façon à effectuer un travail de creusage et de dégradation des matériaux ; le sens de rotation du rotor est indiqué par une flèche, figure 1bis.
- Ces dents 29 apparaissent en détail sur la figure 1bis. Elles sont montées sur un support 30 fixé sur le rotor et elles ont un corps dont la forme générale est cylindrique et dont l'axe 31 fait un angle A par rapport à la tangente 32 compris entre 30 et 60°, de préférence voisin de 45°.
- Le réglage de la position du godet au moyen du vérin 26 permet de modifier la profondeur d'attaque des dents 29 par rapport à la lame racleuse 6.
- Le rotor 7 apparaît figure 2. Il est constitué d'hélices qui permettent un recentrage des matériaux vers l'entrée 33 du tapis élévateur 8. Ces hélices 34 sont par exemple au nombre de quatre, deux avec un pas à droite et deux avec un pas à gauche, et elles comportent à leur périphérie, les dents 29 détaillées figure 1bis. Dans la partie centrale du rotor, on a préservé un espace de 10 à 20 cm environ entre les extrémités des hélices 34. Ces hélices peuvent aussi être décalées angulairement sur le rotor de façon que leurs extrémités centrales ne soient pas en concordance, comme représenté figure 2 ; ces extrémités peuvent être en concordance et former un entonnoir.
- On remarque, figure 2, disposé dans le plan médian 35 de l'entrée 33, un déflecteur 36 interposé entre la partie supérieure de ladite entrée et le moyeu 37 du rotor 7. Ce déflecteur 36 apparaît également figure 1 et il est représenté de façon détaillée figures 4 et 5.
- Ce déflecteur 36 a pour but de faciliter l'alimentation du tapis élévateur 8 et éviter notamment le recyclage par l'avant des débris. En effet, compte-tenu du sens de rotation des hélices, des pierres ou autres peuvent s'immobiliser dans la partie centrale du rotor et nuire au recentrage et à l'évacuation des débris. Le déflecteur 36 permet de pallier cet inconvénient et de débarrasser en permanence le rotor en guidant les produits vers l'entrée 33 du tapis élévateur 8.
- On remarque, figure 4, le bras déflecteur 36 interposé entre le rotor 7 et en particulier son moyeu 37 et la partie superieure 38 de l'entrée du tapis élévateur 8. Ce bras déflecteur 36 se présente sous la forme d'un plat de section rectangulaire dont l'extrémité inférieure est guidée sur le moyeu 37 au moyen d'une couronne 39. Cette couronne 39 est une couronne d'usure sur laquelle peut frotter l'extrémité 40 du déflecteur 36. Ce déflecteur 36 est guidé latéralement sur la couronne par deux cales 41 soudées à son extrémité 40. Le déflecteur 36 peut ainsi prendre appui sur le moyeu 37 et encaisser des efforts importants lorsqu'il s'agit par exemple d'extraire des pierres bloquées entre les hélices 34.
- On remarque également, figure 2, le décalage latéral du godet 5, du côté droit de l'engin de façon à améliorer la capacité de ramassage sur le bas côté d'une chaussée par exemple.
- Selon l'inclinaison du godet 5, au moyen du vérin 26, le rotor 7 pourra jouer des rôles différents. En position relevée, le rotor 7 n'a qu'un simple rôle de recentrage des matériaux vers l'entrée 33 du tapis élévateur 8 ; en position totalement abaissée, le rotor 7 assure toujours le recentrage des matériaux vers l'entrée 33 du tapis élévateur 8 mais en plus, au moyen de ses dents 29, il effectue une véritable opération de creusage sur une hauteur qui peut être de l'ordre de 10 cm à 40 cm.
- Pour obtenir une grande précision au niveau de la tête de ramassage de l'engin, on a interposé entre le châssis 4 et le bâti 2 du train de chenilles un joint du type universel comportant un cadre intermédiaire 3, fig. 3. Ce cadre intermédiaire 3 est inséré dans le bâti 2 du train de chenilles ; il est articulé selon un axe longitudinal 45 qui correspond à l'axe de roulis de l'engin et qui se situe dans le plan médian 35. Ce mouvement de roulis est contrôlé au moyen d'un vérin 46 interposé entre une chape 47 disposée dans un coin latéral du cadre 3 et une potence 48 solidaire du bâti 2.
- Le châssis 4 est articulé sur le cadre 3 autour d'un axe transversal 49 de tangage. Cet axe 49 se situe à l'arrière du cadre 3 ; la liaison entre le cadre 3 et le châssis 4 s'effectue au moyen des chapes 50 et 51 disposées respectivement sur ledit cadre 3 et ledit châssis 4.
- Le mouvement de tangage du châssis 4 est contrôlé au moyen d'au moins un vérin 52 disposé à la partie avant du cadre 3, et de préférence au moyen de deux vérins 52 disposés latéralement dans les angles dudit cadre 3.
- Le cadre 3 est inséré dans le bâti 2 et il est notamment soutenu par les traverses avant 53 et arrière 54 dudit bâti ; l'axe de roulis 45 se situant sensiblement au centre desdites traverses 53 et 54.
- Les signes de référence insérés après les caractéristiques techniques mentionnées dans les revendications ont pour seul but de faciliter la compréhension de ces dernières, et n'en limitent aucunement la portée.
Claims (8)
1.- Engin de ramassage et de chargement en continu de matériaux, du type automoteur qui comporte un train de chenilles (1) surmonté d'un châssis (4) comprenant, d'avant en arrière :
- une tête de ramassage constituée d'un godet (5) mobile, muni d'une lame racleuse transversale (6) et d'un rotor transversal (7) à hélices de centrage des matériaux ;
- un tapis élévateur (8) s'étendant derrière ledit godet (5) ;
- un tapis distributeur (11) orientable, s'étendant en aval dudit tapis élévateur (8),
caractérisé en ce qu'il comporte, entre le châssis (4) et le train de chenilles (1), un joint du type universel en forme de cadre inséré dans le bâti (2) du train de chenilles (1) ; ce cadre (3) est articulé selon un axe médian longitudinal (35) de roulis, sur le bâti (2) du train de chenilles (1), mobile sous l'effet d'au moins un vérin (36) interposé entre lui et ledit bâti (2) ; le châssis (4) est articulé selon un axe transversal (39) de tangage, sur le cadre (3), lequel châssis est mobile au moyen d'au moins un vérin (42) interposé entre lui et ledit cadre (3), de façon à régler la position de la tête de ramassage par rapport au sol.
- une tête de ramassage constituée d'un godet (5) mobile, muni d'une lame racleuse transversale (6) et d'un rotor transversal (7) à hélices de centrage des matériaux ;
- un tapis élévateur (8) s'étendant derrière ledit godet (5) ;
- un tapis distributeur (11) orientable, s'étendant en aval dudit tapis élévateur (8),
caractérisé en ce qu'il comporte, entre le châssis (4) et le train de chenilles (1), un joint du type universel en forme de cadre inséré dans le bâti (2) du train de chenilles (1) ; ce cadre (3) est articulé selon un axe médian longitudinal (35) de roulis, sur le bâti (2) du train de chenilles (1), mobile sous l'effet d'au moins un vérin (36) interposé entre lui et ledit bâti (2) ; le châssis (4) est articulé selon un axe transversal (39) de tangage, sur le cadre (3), lequel châssis est mobile au moyen d'au moins un vérin (42) interposé entre lui et ledit cadre (3), de façon à régler la position de la tête de ramassage par rapport au sol.
2.- Engin de ramassage et de chargement en continu de matériaux, selon la revendication 1, caractérisé en ce que le rotor (7) travaille en avalant et comporte des dents (29) munies de pointes perforatrices en acier à haute résistance dont l'axe (31) forme, avec la tangente (32) du rotor, un angle A compris entre 30 et 60°.
3.- Engin de ramassage et de chargement en continu de matériaux, selon l'une quelconque des revendications 1 ou 2, caractérisé en ce qu'il comporte un rotor constitué d'hélices (34), à sens inversé, séparées, devant l'entrée (33) du tapis élévateur (8), d'un espace compris entre 10 et 20 cm dans lequel espace on trouve, interposé entre la partie supérieure (38) de ladite entrée et le moyeu (37) dudit rotor, un déflecteur (36) positionné dans le plan médian (35) de ladite entrée (33).
4.- Engin de ramassage et de chargement en continu de matériaux, selon la revendication 3, caractérisé en ce qu'il comporte un déflecteur (36) dont l'extrémité inférieure est guidée sur le moyeu (37) du rotor (7), au moyen d'une couronne d'usure (39).
5.- Engin de ramassage et de chargement en continu de matériaux, selon l'une quelconque des revendications 1 à 4, caractérisé en ce que le godet (5) est articulé sur l'axe (25) du rouleau d'entrée (9) du tapis élévateur (8), lequel godet est mobile sous l'effet d'au moins un vérin (26) interposé entre le châssis (4) et ledit godet (5) pour faire varier l'angle d'attaque des dents (29) du rotor (7) par rapport à la position de la lame (6) d'entrée dudit godet.
6.- Engin de ramassage et de chargement en continu de matériaux, selon l'une quelconque des revendications 1 à 5, caractérisé en ce qu'il comporte une tête de ramassage décalée latéralement, du côté droit dudit engin par exemple.
7.- Engin de ramassage et de chargement en continu de matériaux, selon l'une quelconque des revendications 1 à 6, caractérisé en ce que le tapis distributeur (8) est monté sur un axe de pivotement vertical (13) autorisant un chargement des matériaux dans un secteur angulaire au moins égal à 180°.
8.- Engin de ramassage et de chargement en continu de matériaux, selon la revendication 7 caractérisé en ce que le support (12) du tapis distributeur (11) est monté sur des guides (14) coulissant sur des poteaux (15) disposés à l'extrémité du châssis (4) de façon à permettre un repliement dudit tapis (11) à l'arrière de l'engin pour faciliter son transport.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR8804486 | 1988-03-31 | ||
| FR8804486A FR2629497B1 (fr) | 1988-03-31 | 1988-03-31 | Engin de ramassage et de chargement en continu de materiaux |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP0335800A1 true EP0335800A1 (fr) | 1989-10-04 |
Family
ID=9364976
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP89400879A Withdrawn EP0335800A1 (fr) | 1988-03-31 | 1989-03-29 | Engin de ramassage et de chargement en continu de matériaux |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP0335800A1 (fr) |
| FR (1) | FR2629497B1 (fr) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1119666A4 (fr) * | 1999-02-19 | 2002-06-19 | Erik D Scudder | Procede et pulverisateur permettant de garnir des tranches |
| EP1477616A3 (fr) * | 2003-04-15 | 2005-01-05 | Hubert Nacken | Outil pour déplacer et niveler la terre |
| GB2414761A (en) * | 2004-06-01 | 2005-12-07 | Jarvis Fastline Ltd | Ballast removal method and apparatus |
| RU2689464C1 (ru) * | 2018-05-24 | 2019-05-28 | Федеральное государственное бюджетное образовательное учреждение высшего образования "Псковский государственный университет" | Землеройная машина |
| CN110217544A (zh) * | 2019-06-27 | 2019-09-10 | 徐州前诚网络科技有限公司 | 一种用于挖掘机的快速挖掘输土结构 |
| RU2709574C1 (ru) * | 2018-06-29 | 2019-12-18 | Федеральное государственное бюджетное образовательное учреждение высшего образования "Псковский государственный университет" | Землеройная машина |
| CN111361649A (zh) * | 2020-04-14 | 2020-07-03 | 建德托程自动化设备有限公司 | 一种自清洁履带的推土设备 |
| CN111470342A (zh) * | 2020-05-20 | 2020-07-31 | 杭州奥拓机电股份有限公司 | 一种履带移动式螺旋清仓机 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2718169B1 (fr) * | 1994-04-05 | 1996-06-21 | Rabaud Sa | Engin de façonnage et/ou de remise en état de bas-côtés. |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3651588A (en) * | 1969-09-18 | 1972-03-28 | Raymond A Hanson | Grade trimming apparatus |
| US3779661A (en) * | 1971-05-03 | 1973-12-18 | H Godbersen | Machine and method for preparing a surface and for slip forming a concrete structure |
| US3982340A (en) * | 1974-01-21 | 1976-09-28 | Unit Rig And Equipment Co. | Two wheel excavating and loading system |
-
1988
- 1988-03-31 FR FR8804486A patent/FR2629497B1/fr not_active Expired - Lifetime
-
1989
- 1989-03-29 EP EP89400879A patent/EP0335800A1/fr not_active Withdrawn
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3651588A (en) * | 1969-09-18 | 1972-03-28 | Raymond A Hanson | Grade trimming apparatus |
| US3779661A (en) * | 1971-05-03 | 1973-12-18 | H Godbersen | Machine and method for preparing a surface and for slip forming a concrete structure |
| US3982340A (en) * | 1974-01-21 | 1976-09-28 | Unit Rig And Equipment Co. | Two wheel excavating and loading system |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1119666A4 (fr) * | 1999-02-19 | 2002-06-19 | Erik D Scudder | Procede et pulverisateur permettant de garnir des tranches |
| EP1477616A3 (fr) * | 2003-04-15 | 2005-01-05 | Hubert Nacken | Outil pour déplacer et niveler la terre |
| GB2414761A (en) * | 2004-06-01 | 2005-12-07 | Jarvis Fastline Ltd | Ballast removal method and apparatus |
| EP1650347A1 (fr) * | 2004-06-01 | 2006-04-26 | Fastline Limited | Engin de ramassage de ballast de voie |
| GB2414761B (en) * | 2004-06-01 | 2007-10-03 | Jarvis Fastline Ltd | Ballast removal method and apparatus |
| RU2689464C1 (ru) * | 2018-05-24 | 2019-05-28 | Федеральное государственное бюджетное образовательное учреждение высшего образования "Псковский государственный университет" | Землеройная машина |
| RU2709574C1 (ru) * | 2018-06-29 | 2019-12-18 | Федеральное государственное бюджетное образовательное учреждение высшего образования "Псковский государственный университет" | Землеройная машина |
| CN110217544A (zh) * | 2019-06-27 | 2019-09-10 | 徐州前诚网络科技有限公司 | 一种用于挖掘机的快速挖掘输土结构 |
| CN111361649A (zh) * | 2020-04-14 | 2020-07-03 | 建德托程自动化设备有限公司 | 一种自清洁履带的推土设备 |
| CN111361649B (zh) * | 2020-04-14 | 2020-12-18 | 浙江中法农业科技发展有限公司 | 一种自清洁履带的推土设备 |
| CN111470342A (zh) * | 2020-05-20 | 2020-07-31 | 杭州奥拓机电股份有限公司 | 一种履带移动式螺旋清仓机 |
Also Published As
| Publication number | Publication date |
|---|---|
| FR2629497B1 (fr) | 1992-05-07 |
| FR2629497A1 (fr) | 1989-10-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0230072B1 (fr) | Dispositif et procédé de brossage | |
| US5381616A (en) | Rotary rockwheel assemblies | |
| EP0880880B1 (fr) | Tondeuse à gazon à conducteur porté comprenant notamment un collecteur pour l'herbe coupée | |
| FR2640299A1 (fr) | Machine niveleuse de chaussee | |
| EP0335800A1 (fr) | Engin de ramassage et de chargement en continu de matériaux | |
| EP0225243B1 (fr) | Machine pour creuser des tranchées dans le sol | |
| EP2370643B1 (fr) | Benne de terrassement | |
| FR2744144A1 (fr) | Concasseur automoteur commande a distance, apte a travailler dans des excavations | |
| EP0258122B1 (fr) | Engin de fraisage pour creuser des tranchées dans le sol | |
| EP0087361A1 (fr) | Machine à curer ou à creuser des fossés | |
| FR2718169A1 (fr) | Engin de façonnage et/ou de remise en état de bas-côtés. | |
| FR2534110A1 (fr) | Dispositif destine a supporter, au moins partiellement, le poids d'une machine agricole | |
| FR2640112A1 (fr) | Herse rotative | |
| FR2545068A1 (fr) | Rayon raclant repliable pour prelever et distribuer des materiaux deposes en tas | |
| EP0419388B1 (fr) | Machine préparatrice de sols | |
| FR2687533A1 (fr) | Dispositif de preparation de sol pour en retirer des objets. | |
| FR2671315A1 (fr) | Dispositif de dechargement de materiaux contenus dans une benne basculante. | |
| FR2634347A1 (fr) | Dispositif de prelevement pour separer et ramasser du fourrage | |
| FR2800400A1 (fr) | Vehicule automoteur multifonction pour l'entretien des espaces verts | |
| FR3068374A1 (fr) | Machine excavatrice pour ronger les bordures et les caniveaux | |
| WO2005015974A2 (fr) | Machine combinee forestiere pour le travail du sol | |
| FR2714920A1 (fr) | Machine autochargeuse pour le remblayage de tranchées. | |
| BE478135A (fr) | ||
| FR2535756A1 (fr) | Dispositif balayeur-elevateur perfectionne pour ramassage, balayage et scarification | |
| FR2659676A1 (fr) | Machine pour le nettoyage des plages de sable. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE DE ES FR GB IT |
|
| 17P | Request for examination filed |
Effective date: 19891211 |
|
| 17Q | First examination report despatched |
Effective date: 19910227 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION IS DEEMED TO BE WITHDRAWN |
|
| 18D | Application deemed to be withdrawn |
Effective date: 19910924 |