EP0339615B1 - Etikettiermaschine, um Etiketten in einer bestimmten Stellung auf Gegenstände aufzubringen - Google Patents
Etikettiermaschine, um Etiketten in einer bestimmten Stellung auf Gegenstände aufzubringen Download PDFInfo
- Publication number
- EP0339615B1 EP0339615B1 EP19890107568 EP89107568A EP0339615B1 EP 0339615 B1 EP0339615 B1 EP 0339615B1 EP 19890107568 EP19890107568 EP 19890107568 EP 89107568 A EP89107568 A EP 89107568A EP 0339615 B1 EP0339615 B1 EP 0339615B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- labeling
- article
- angular
- degree
- drum
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000002372 labelling Methods 0.000 title claims description 144
- 230000010363 phase shift Effects 0.000 claims description 15
- 238000006073 displacement reaction Methods 0.000 claims description 8
- 238000000034 method Methods 0.000 claims description 6
- 238000012544 monitoring process Methods 0.000 claims 1
- 239000011295 pitch Substances 0.000 description 5
- 230000006835 compression Effects 0.000 description 3
- 238000007906 compression Methods 0.000 description 3
- 239000000853 adhesive Substances 0.000 description 2
- 230000001070 adhesive effect Effects 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- NCGICGYLBXGBGN-UHFFFAOYSA-N 3-morpholin-4-yl-1-oxa-3-azonia-2-azanidacyclopent-3-en-5-imine;hydrochloride Chemical compound Cl.[N-]1OC(=N)C=[N+]1N1CCOCC1 NCGICGYLBXGBGN-UHFFFAOYSA-N 0.000 description 1
- 230000002159 abnormal effect Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000000644 propagated effect Effects 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65C—LABELLING OR TAGGING MACHINES, APPARATUS, OR PROCESSES
- B65C9/00—Details of labelling machines or apparatus
- B65C9/40—Controls; Safety devices
- B65C9/42—Label feed control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B57/00—Automatic control, checking, warning, or safety devices
- B65B57/10—Automatic control, checking, warning, or safety devices responsive to absence, presence, abnormal feed, or misplacement of articles or materials to be packaged
Definitions
- the present invention relates generally to a labeling system as disclosed in EP-A-0 033 609 and recited in the preamble of claim 1 and more particularly to a labeling system including a means for adjusting a tolerance of labeling position relative to a given area such as bottles in a sequential labeling operation.
- a further conventional labeling apparatus for attaching a label to vessels as disclosed in FR-B-1 247 933 includes a vessel positioning mechanism, for example, a screw unit which is mechanically synchronized with the rotation of a labeling drum is provided at a vessel positioning station.
- the vessel positioning mechanism is operable to provide a constant carrying pitch between the vessels on a conveyor so as to determine a position where a label is attached to the vessel, or a relative labeling position with respect to the drum.
- the vessels after being positioned at a given interval, are carried to a labeling station.
- a label magazine provides labels to the labeling drum in sequence.
- the labels are backed with adhesive by an adhesion roller and then are provisionally affixed to the vessels carried on the conveyor.
- the labeled vessels are fed to a final finishing section and are pressed moderately by a compression unit.
- This sequential labeling operation is effected by a driver which is mechanically connected to a single driving source provided in the labeling system.
- the positioning of vessels with respect to the labeling drum is important. Only when the relative position of the vessel with respect to the labeling head provided on a labeling drum is determined precisely can accurate labeling be provided.
- an object of the present invention to provide a labeling apparatus for attaching a label accurately to a given area on articles such as bottles in a sequential labeling operation, and a method therefor.
- the present invention is based on a labeling apparatus for attaching labels onto articles wherein a specific point defined on a label aligns with a predetermined position on an article, which comprises a first means for feeding the articles toward a labeling station at given carrying intervals, a second means, provided at the labeling station, for providing labels to articles at given labeling intervals which corresponds to the given carrying intervals, a third means for determining a relative degree of shift between the predetermined position on an article fed by the first means and the specific point on a label provided by the second means, and a fourth means for adjusting the labeling interval of the second means based on the relative degree of shift so that the specific point on the label corresponds to the predetermined labeling point on the article.
- the second means is a rotary labeling drum having a plurality of labeling heads at regular intervals which respectively dispense labels.
- the third means includes a photo sensor for sensing an article carried by a conveyor as the first means, and a rotary encoder for detecting the angular position of the rotary labeling drum.
- the labeling position is defined by the exact coincidence of the specific point on a label provided on the labeling head with the predetermined position on an article at the labeling station.
- the third means determines a degree of angular displacement of the rotary labeling drum based on a signal output by the rotary encoder after the labeling head passes the labeling point until another article is sensed by the photo sensor to calculate a degree of phase shift of the angular position of the rotary labeling drum from the given labeling interval.
- the fourth means adjusts the rotation of said labeling rotary drum so as to implement said degree of phase shift.
- This system comprises generally an input screw unit 1 functioning as a positioner for vessels 5, a conveyer 2 for carrying vessels, a labeling station 3 for providing a label to the vessels, and compression units 4 for pressing the label attached to the vessel.
- the vessels 5, such as bottles are positioned by the input screw unit 1 at a given interval and are carried on a belt of the conveyer 2 toward the labeling station 3.
- the labeling station includes a rotary labeling drum 12, labeling heads 15, an adhesion roller unit 16, and a label magazine 8.
- the rotary labeling drum 12 is rotatably supported by gearing (not shown) disposed beneath the labeling station and is driven by a drive motor 6 through a gear assembly 20 so as to be mechanically synchronized with the rotation of the input screw unit 1 via a main drive shaft 14.
- the synchronization determines a carrying pitch between the vessels 5 on the conveyer 2 to provide precise sequential labeling.
- labeling heads are arranged, for example, at six intervals.
- the label magazine provides a label to the labeling heads in sequence.
- the adhesion roller unit 16 provides an adhesive onto the reverse surface of the label provided on the head 15. Thereafter, this label is attached to a given area of a vessel 5 carried by the conveyer 2.
- Such a sequential labeling operation is effected by the precise synchronization of the input screw unit 1 with the rotary labeling drum 12.
- the synchronization is however subject to slippage due to shifts in vessel position caused by gripping, or misregistration of the vessel on the conveyer 2 or backlash from the drive caused by wear of gears for example. Therefore, in the labeling system according to the invention, a means for compensating for a degree of shift of the vessel with respect to a head of a rotary labeling drum is provided.
- This means includes a differential gear 13, a servo motor 7 therefor, a photo sensor 10, and a controller 9.
- the photo sensor 10 is adapted for sensing the position of a vessel carried on the conveyer and to provide a signal indicative thereof to the controller 9.
- the controller determines the relative degree of shift between each vessel 5, or a predetermined position defined thereon and a corresponding head of a rotary labeling drum 12.
- the differential gear 13 is driven by a servo motor 7 according to the value of the relative degree of shift.
- the differential gear 13 is mechanically connected to a gear (not shown) disposed beneath the labeling station 3 via a shaft 22. This gear rotates the rotary labeling drum 12 so as to advance or retard the rotation thereof independent of the drive motor 6 to compensate for any shift in vessel position to maintain accurate label placement.
- the vessel is pressed by a pair of pads at the compression unit 4 to finish the sequential labeling operation
- the means further includes a rotary encoder 11.
- the rotary encoder 11 is installed on the rotary labeling drum 12 so as to monitor an angle of rotation thereof and provides pulse signals of an ⁇ A ⁇ , a ⁇ B ⁇ , and a ⁇ Z ⁇ phase indicative of the angular position of the drum to the controller 9 (As is well known in the art, a rotary encoder is adapted for providing an A phase pulse signal, a B phase pulse signal, and a Z phase pulse signal.
- the B phase pulse signal is shifted 90 degrees from the-A phase pulse signal.
- the Z phase pulse signal is a reference signal which is output every cycle).
- an interface circuit (not shown) for the rotary encoder is provided. This circuit detects the leading edges of pulse signals of the A and B phases.
- the downcounter receives P number of pulse signals for every cycle of the rotary labeling drum 12 and indicates a value within 0 to -(P-1) (0 to -14399). (Thus, since six labeling heads are provided on the rotary labeling drum, the angle between each corresponds to 2400 pulse signals. These 2400 pulse signals correspond to the carrying pitch of the vessels.)
- the sensor senses the leading edge of the vessel and provides a signal to the controller 9 to interrupt the CPU.
- the CPU reads the value of the downcounter and can convert this value into to provide an integer value within 0 to (P-1) (0 to 14339) as the phase angle of the rotary labeling drum 12.
- the phase difference (R) is the degree of displacement of a labeling head past a labeling point defined by the exact coincidence of the labeling head with the predetermined position of the articles at the labeling station.
- the number of pulses defining R are counted beginning at the labeling point and ending when the photo sensor 10 encounters the leading edge of the next vessel. (as in Fig. 2)
- the value ⁇ R ⁇ is variable dependent on the degree of shift of the vessel with respect to the head of the rotary labeling drum.
- this certain value is ⁇ C ⁇
- the controller 9 After obtaining the deflection E, the controller 9 provides pulse signals of a number corresponding to the deflection E to the servo motor 7.
- the servo motor 7 rotates the labeling drum by an angle corresponding to Y number of pulse signals via the differential gear thereby correcting for the shift of a vessel 5 with respect to the corresponding head of the label holder 15.
- a sequential correction control for phase shift as described above is repeated every carrying pitch and the labeling is thus effected regularly.
- the CPU breaks off outputting the pulse signals at a predetermined tolerance point in order to protect the mechanical system.
- the deflection E is small, (e.i., the absolute value of the deflection E is within a certain range ⁇ M ⁇ ) no adjusting operation is provided.
- the ⁇ Yb ⁇ is a number of the output pulse signals at the previous adjusting operation, while the ⁇ B ⁇ is a value into which backlash as an error due to reversion of the differential gear 13 is converted and is a proper value defined by the type of differential gears employed.
- FIG. 3 shows a sensor 30 suitable for box shaped vessels.
- This sensor is comprised of a light source 32 and a light receiving means 34.
- the light receiving means includes a plurality of light receiving elements sensitive to the light beam from the light source.
- the controller 9 can determine the degree of angular displacement of the predetermined position on the vessel in response to the signal output from an element of the light receiving means.
- Fig. 4 shows a sensor means 40 suitable for cylindrical vessels.
- a cylindrical vessel such as a bottle usually has a spot 42 for setting its angular position at a positioning section of the labeling system.
- the sensor means 40 includes a camera 42 and an image measuring apparatus 46 connected to the controller 9. The camera provides an image signal of the spot on the vessel carried on the conveyer 2 to an image measuring apparatus 46.
- the sensor means 40 can thereby detect angular misregistration of the vessel on the conveyer 2 and, if present, determine the degree of angular displacement thereof.
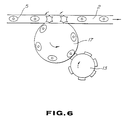
- FIG. 5 an angular and positional relationship between the vessel and the labeling head 15 is shown.
- the shown vessel 5 has been displaced by a distance ⁇ x ⁇ opposite the carrying direction and is shifted by a ⁇ - ⁇ ⁇ angle in the clockwise direction.
- the distance between the center of the labeling head (i.e., a specific point defined on the label provided on the labeling head) and the point of contact ⁇ C ⁇ or the arc OC is R ⁇
- the distance between the center of the vessel and the point of contact C, or the arc LC is -r(- ⁇ - ⁇ ).
- the ⁇ is set up as in the following equation.
- the controller 9 can output Y number of pulse signals to the servo motor 7 to adjust the labeling interval of the labeling drum as necessary so that the specific point on the label aligns with the predetermined position on the vessel.
- the labeling system according to the invention is adapted for measuring the pitches between vessels carried on a conveyer and/or an angular misregistration of the vessels to calculate a degree of shift between a given labeling area of the vessel and the corresponding labeling head of the labeling drum and for driving a servo motor to adjust the angle of rotation of the rotary labeling drum.
- the present invention is not limited to the above embodiment of a carrying mechanism for vessels.
- a differential gear may be provided in a driver for a vessel carrying rotary table 17 and the angle of rotation of the table can be controlled to adjust for phase shift between a vessel and a corresponding labeling head.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Labeling Devices (AREA)
Claims (8)
- Etikettier-Vorrichtung zum Anbringen von Etiketten an Gegenständen, wobei ein bestimmter, an einem Etikett definierter Punkt mit einer vorbestimmten Position an einem Gegenstand übereinstimmt, und die Vorrichtung enthält:
erstes Mittel (1) zum Zuführen der Gegenstände (5) an einen Förderer (2) in einer Förderrichtung zu einer Etikettier-Station (3) mit bestimmten Förderabständen;
zweites an der Etikettier-Station vorgesehenes Mittel, um die Etiketten den Gegenständen (5) mit bestimmten Etikettier-Abständen zuzuführen, welche den bestimmten Förderabständen entsprechen;
drittes Mittel, das einen ersten Fühler (10) einschließt, zum Erfassen der Position des Gegenstandes (5) an dem Förderer (2) mit Bezug auf die Förderrichtung, um so innerhalb eines Bereiches eines Förderabstandes vor einem Etikettier-Punkt, der durch das Koinzidenz des bestimmten Punktes an einem Gegenstandes (5) an der Etikettier-Station (3) bestimmt ist, ein dafür bezeichnetes Signal zu erhalten; und
viertes Mittel (7, 9, 13), das auf ein Signal von dem dritten Mittel reagiert zum Steuern des zweiten Mittels in der Weise, daß der bestimmte Punkt an einem Etikett der durch den ersten Fühler (10) erfaßten vorbestimmten Position an dem Gegenstand (5) entspricht,
dadurch gekennzeichnet, daß
das zweite Mittel eine drehbare Etikettier-Trommel (12) mit einer Vielzahl von Etikettier-Köpfen (15) enthält, die jeweils Etiketten abgeben,
das dritte Mittel weiter einen zweiten Fühler (11) enthält zum Erfassen von Winkelstellungen der Etikettier-Köpfe (15), um ein dafür bezeichnendes Signal zu schaffen, wobei das dritte Mittel in Abhängigkeit von dem Signal vom ersten Fühler (10) eine Winkelposition des Etikettier-Kopfes (15) bestimmt, der der Position des durch den ersten Fühler (10) erfaßten Gegenstandes (5) entspricht, um ein Ausmaß von Phasenverschiebung der Winkelposition des Etikettier-Kopfes (15) gegen den vorgegebenen Etikettier-Abstand aufgrund des Signals von dem zweiten Fühler (11) zu errechnen,
wobei das vierte Mittel (7, 9, 13) die Drehung der sich drehenden Etikettier-Trommel (12) nachstellt, um das Phasenverschiebungs-Ausmaß zu beseitigen. - Vorrichtung nach Anspruch 1, dadurch gekennzeichnet, daß das erste Mittel (1) die Gegenstände (5) der Etikettier-Station (3) mit bestimmten Förderabständen zuführt mit einer vorbestimmten Winkelausrichtung zwischen den Gegenständen (5) und dem Förderer (2), das dritte Mittel weiter einen Winkelfühler (30, 40) enthält, der die durch das erste Mittel (1) zugeführten Gegenstände (5) überwacht zum Erfassen einer Winkel-Fehlausrichtung des Gegenstandes (5) bezüglich des Förderers (2), um ein dafür bezeichnendes Signal zu schaffen, das dritte Mittel ein Ausmaß von Winkelversatz zwischen der vorbestimmten Position an dem Gegenstand (5) und dem bestimmten Punkt an einem durch das zweite Mittel zugeführten Etikett bestimmt aufgrund der Signale von dem ersten Fühler (10) und dem Winkelfühler (30, 40) um das Ausmaß der Phasenverschiebung der Winkelposition des Etikettier-Kopfes (15) gegenüber dem bestimmten Etikettier-Abstand zu errechnen und das vierte Mittel die Drehung der sich drehenden Etikettier-Trommel (12) nachstellt, um das Ausmaß der Phasenverschiebung zu beseitigen.
- Vorrichtung nach Anspruch 2, dadurch gekennzeichnet, daß das dritte Mittel einen für die drebbare Etikettier-Trommel 812) erforderlichen Drehwinkel bestimmt, um das Ausmaß der Phasenverschiebung zu beseitigen und die vorbestimte Position an dem Gegenstand (5) mit dem bestimmten Punkt an dem Etikett zusammenfallen zu lassen, wobei das vierte Mittel die Drehung der drehbaren Etikettier-Trommel (12) um den Drehwinkel nachstellt.
- Vorrichtung nach Anspruch 2, dadurch gekennzeichnet, daß das dritte Mittel das Ausmaß des Winkelversatzes (E) aufgrund einer Beziehung

- Vorrichtung nach Anspruch 1, dadurch gekennzeichnet, daß das vierte Mittel einen Servomotor (7) enthält, der einen Drehwinkel der drehbaren Etikettier-Trommel (12) über ein Getriebe (13) nachstellt, wobei das vierte Mittel ein Ansteuersignal (Y) mit einem Wert, der dem Ausmaß der Phasenverschiebung entspricht, für den Servomotor (7) schafft, um die drehbare Etikettier-Trommel (12) in Beschleunigungsrichtung oder Verzögerungsrichtung zu drehen, wobei das vierte Mittel ein Ansteuersignal (Y) schafft, zu dem ein bestimmter Wert addiert wird in Hinsicht auf Spiel infolge der Drehungsumkehr des Getriebes (13).
- Verfahren zum Befestigen von Etiketten an Gegenständen, bei dem ein bestimmter an dem Etikett definierter Punkt mit einer vorbestimmten Position an einem Gegenstand übereinstimmt, mit den Schritten:
die Gegenstände werden in einer Förderrichtung zu einer Etikettier-Station mit bestimmten Förderabständen zugeführt;
die Etiketten werden den Gegenständen mit bestimmten Etikettier-Abständen zugeführt, welche den bestimmten Förderabständen an der Etikettier-Station entsprechen, mittels eines an der Etikettier-Station vorgesehenen Etikettier-Geräts,
die Position des zugeführten Gegenstandes wird bezüglich der Förderrichtung bestimmt und innerhalb eines Bereichs eines Förderabstandes vor einer Etikettier-Stelle, die durch die Koinzidenz des bestimmten Punktes an dem Gegenstand an der Etikettier-Station definiert ist, ein dafür bezeichnendes Signal erhalten; und
das Etikettier-Mittel wird mittels des Signals so gesteuert, daß der bestimmte Punkt an einem Etikett der vorbestimmten Position an dem Gegenstand entspricht;
dadurch gekennzeichnet, daß es weiter die folgenden Schritte enthält:
als Etikettier-Gerät wird eine Etikettier-Trommel mit einer Vielzahl von Etikettier-Köpfen benutzt, die jeweils Etiketten abgeben,
die Winkelpositionen der Etikettier-Köpfe werden erfaßt, um dafür bezeichnende Signale zu schaffen;
es wird in Abhängigkeit von dem für die Position des zugeführten Gegenstandes bezeichnenden Signal eine Winkelposition des Etikettier-Kopfes bestimmt, welche der Position des erfaßten Gegenstandes entspricht, und ein Ausmaß einer Phasenverschiebung der Winkelposition des Etikettier-Kopfes aus dem bestimmten Etikettier-Abstand errechnet aufgrund des für die Winkelpositionen der Etikettier-Köpfe bezeichnenden Signals; und
die Drehung der drehbaren Etikettier-Trommel wird nachgestellt, um das Ausmaß der Phasenverschiebung zu beseitigen. - Verfahren nach Anspruch 6, bei dem die Gegenstände mit einer vorbestimmten Winkelausrichtung bezüglich der Förderrichtung zugeführt werden, dadurch gekennzeichnet, daß es weiter die Schritte umfaßt:
die zugeführten Gegenstände werden überwacht, um eine Winkel-Fehlausrichtung eines Gegenstandes zu erfassen und ein dafür bezeichnendes Signal zu schaffen;
ein Ausmaß eines Winkelversatzes zwischen einer vorbestimmten Position an dem Gegenstand und dem bestimmten Punkt an einem durch den Etikettier-Kopf zugeführten Etikett wird aufgrund des für die Position des Gegenstandes repräsentativen Signals und des für die Winkel-Fehlausrichtung des Gegenstandes repräsentativen Signals bestimmt und das Ausmaß der Phasenverschiebung der Winkelposition des Etikettier-Kopfes aus dem bestimmten Etikettier-Abstand errechnet; und
die Drehung der drehbaren Etikettier-Trommel wird nachgestellt, um das Ausmaß der Phasenverschiebung zu beseitigen. - Verfahren nach Anspruch 7, bei dem die Drehung der drehbaren Etikettier-Trommel nachgestellt wird mittels eines Servomotors über ein Getriebe, dadurch gekennzeichnet, daß das Nachstellen der Drehung der drehbaren Etikettier-Trommel umfaßt, daß dem Servomotor ein Ansteuersignal zugeführt wird mit einem Wert, der dem Ausmaß der Phasenverschiebung entspricht, um die drehbare Etikettier-Trommel in einer Beschleunigungsrichtung oder einer Verzögerungsrichtung zu drehen; und daß ein bestimmter Wert zu dem Ansteuersignal hinzugefügt wird in Hinsicht auf infolge der Umsteuerung des Getriebes auftretendes Spiel.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP10357188A JPH01279037A (ja) | 1988-04-26 | 1988-04-26 | ラベル位置ズレ矯正装置及びその方法 |
| JP103571/88 | 1988-04-26 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0339615A1 EP0339615A1 (de) | 1989-11-02 |
| EP0339615B1 true EP0339615B1 (de) | 1993-06-30 |
Family
ID=14357486
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP19890107568 Expired - Lifetime EP0339615B1 (de) | 1988-04-26 | 1989-04-26 | Etikettiermaschine, um Etiketten in einer bestimmten Stellung auf Gegenstände aufzubringen |
Country Status (5)
| Country | Link |
|---|---|
| EP (1) | EP0339615B1 (de) |
| JP (1) | JPH01279037A (de) |
| AU (1) | AU621102B2 (de) |
| CA (1) | CA1333477C (de) |
| DE (1) | DE68907374T2 (de) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB9002646D0 (en) * | 1990-02-06 | 1990-04-04 | Harland Mach Syst | A control system for labelling apparatus |
| US6558490B2 (en) * | 1997-10-06 | 2003-05-06 | Smyth Companies, Inc. | Method for applying labels to products |
| DE20019062U1 (de) † | 2000-11-09 | 2001-12-20 | KHS Maschinen- und Anlagenbau AG, 44143 Dortmund | Vorrichtung zur Steuerung der Drehbewegung von Gefäßen |
| DE102005020902A1 (de) * | 2005-05-04 | 2006-09-28 | Siemens Ag | Verfahrenstechnische, insbesondere mikroverfahrenstechnische Anlage |
| DE102006026618A1 (de) * | 2006-09-02 | 2008-03-13 | Khs Ag | Verfahren zum lagegenauen Aufbringen von Etiketten sowie Etikettiermaschine |
| CN103723477B (zh) * | 2012-10-12 | 2017-12-19 | 上海优汉实业发展有限公司 | 圆形包装物标签在线检测器及检测系统和检测方法 |
| JP6353327B2 (ja) * | 2014-09-19 | 2018-07-04 | 株式会社イシダ | ラベル発行貼付装置 |
| CN105523249A (zh) * | 2014-09-29 | 2016-04-27 | 天津市西祥塑料制品有限公司 | 一种贴标机报警装置 |
| CN107000875B (zh) * | 2014-12-15 | 2019-10-18 | 利乐拉瓦尔集团及财务有限公司 | 操作将饮用吸管施加到包装容器的装置的方法和由该方法操作的装置 |
| JP6583341B2 (ja) * | 2017-04-14 | 2019-10-02 | オムロン株式会社 | 包装機、包装機のための制御装置、制御方法、およびプログラム |
| CN116923844B (zh) * | 2023-09-15 | 2023-12-29 | 杭州百子尖科技股份有限公司 | 一种锂电池间隙涂布的贴标方法、装置、设备及介质 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR1247933A (fr) * | 1957-04-01 | 1960-12-09 | Weiss Maschf Johann | étiqueteuse pour objets placés debout |
| FR2436725A1 (fr) * | 1978-09-20 | 1980-04-18 | Krooss Robert | Appareil d'orientation de bouteilles |
| JPS55154229A (en) * | 1979-05-08 | 1980-12-01 | Susumu Iijima | Labeling machine |
| US4294644A (en) * | 1980-01-30 | 1981-10-13 | Datafile Limited | Servo motor control labeller |
| GB2157039B (en) * | 1984-04-03 | 1988-11-30 | Monarch Marking Systems Inc | System for controlling the advancement of a web of sheet stock containing a plurality of labels |
| JPS6239440A (ja) * | 1985-08-13 | 1987-02-20 | 渋谷工業株式会社 | ラベル取出し装置 |
| JPS62208339A (ja) * | 1986-03-07 | 1987-09-12 | 大阪シーリング印刷株式会社 | ラベル貼着装置 |
-
1988
- 1988-04-26 JP JP10357188A patent/JPH01279037A/ja active Pending
-
1989
- 1989-04-24 AU AU33309/89A patent/AU621102B2/en not_active Ceased
- 1989-04-25 CA CA 597710 patent/CA1333477C/en not_active Expired - Fee Related
- 1989-04-26 EP EP19890107568 patent/EP0339615B1/de not_active Expired - Lifetime
- 1989-04-26 DE DE1989607374 patent/DE68907374T2/de not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| AU3330989A (en) | 1989-11-02 |
| EP0339615A1 (de) | 1989-11-02 |
| JPH01279037A (ja) | 1989-11-09 |
| AU621102B2 (en) | 1992-03-05 |
| DE68907374T2 (de) | 1993-10-14 |
| DE68907374D1 (de) | 1993-08-05 |
| CA1333477C (en) | 1994-12-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0339615B1 (de) | Etikettiermaschine, um Etiketten in einer bestimmten Stellung auf Gegenstände aufzubringen | |
| US5255598A (en) | Screen printing device with continuous registering of rotating stencils | |
| US5313886A (en) | Electronic method of positioning a register mark sensor of a sheet printing machine | |
| US5959295A (en) | Timing device and method for positioning non-linear machine parts | |
| JP3272421B2 (ja) | 複数の印刷機構を有する印刷機用の駆動方法 | |
| EP0265208B1 (de) | Vorrichtung zum Zuführen und Überwachen von Streifen | |
| JPH11217157A (ja) | バックル・プレート折りステーション並びにその制御方法 | |
| US5095219A (en) | Method and arrangement for controlling the cutting of webs of material to the correct design length | |
| JPH06294607A (ja) | 回転する胴の表面上の枚葉紙縁部の位置を測定するための装置 | |
| GB2041538A (en) | Self calibrating data collection system for dynamic wheel balancing machine | |
| JP2527825Y2 (ja) | コンピュータで制御されるラベル貼り装置 | |
| GB2265609A (en) | Method of monitoring the transport of print products | |
| EP0074165A1 (de) | Schneideinrichtung für ein endloses Einwickel-Material | |
| JPS58183432A (ja) | 包装機のタイミング調整装置 | |
| US7458568B2 (en) | Method for compensating a gear backlash and apparatus for carrying out said method | |
| US7809464B2 (en) | Registration system for sheet fed processing machines | |
| KR100385056B1 (ko) | 인쇄기의 피딩 오차 보정장치 및 방법 | |
| US6848361B2 (en) | Control device and method to prevent register errors | |
| EP0676665B1 (de) | Transportvorrichtung | |
| JP2781267B2 (ja) | 円筒体転写印刷方法と装置 | |
| JP2580635B2 (ja) | 主機と従機の同期装置 | |
| JP2549980B2 (ja) | プレス材料送り異常検出装置 | |
| JPS60129261A (ja) | 印刷機の見当調整方法および見当調整装置 | |
| JPH0329487B2 (de) | ||
| WO1999056971A1 (en) | Metal coil printing and pressing registration control |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): DE FR GB |
|
| 17P | Request for examination filed |
Effective date: 19900213 |
|
| 17Q | First examination report despatched |
Effective date: 19920103 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): DE FR GB |
|
| REF | Corresponds to: |
Ref document number: 68907374 Country of ref document: DE Date of ref document: 19930805 |
|
| ET | Fr: translation filed | ||
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: IF02 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20030408 Year of fee payment: 15 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20030423 Year of fee payment: 15 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20030508 Year of fee payment: 15 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20040426 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20041103 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20040426 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20041231 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST |