EP0610128B1 - Procédé de lancement et de contrÔle d'un projectile à partir d'un aéronef et procédé de son guidage après lancement - Google Patents
Procédé de lancement et de contrÔle d'un projectile à partir d'un aéronef et procédé de son guidage après lancement Download PDFInfo
- Publication number
- EP0610128B1 EP0610128B1 EP94400208A EP94400208A EP0610128B1 EP 0610128 B1 EP0610128 B1 EP 0610128B1 EP 94400208 A EP94400208 A EP 94400208A EP 94400208 A EP94400208 A EP 94400208A EP 0610128 B1 EP0610128 B1 EP 0610128B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- trajectory
- aircraft
- projectile
- target
- determined
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000000034 method Methods 0.000 title claims description 22
- 238000004364 calculation method Methods 0.000 claims description 25
- 238000013459 approach Methods 0.000 claims description 24
- 230000003466 anti-cipated effect Effects 0.000 claims description 16
- 238000010276 construction Methods 0.000 claims description 10
- 230000001133 acceleration Effects 0.000 claims description 4
- 238000010200 validation analysis Methods 0.000 claims description 2
- UDKCHVLMFQVBAA-UHFFFAOYSA-M Choline salicylate Chemical compound C[N+](C)(C)CCO.OC1=CC=CC=C1C([O-])=O UDKCHVLMFQVBAA-UHFFFAOYSA-M 0.000 claims 2
- 238000010304 firing Methods 0.000 description 2
- 101100536354 Drosophila melanogaster tant gene Proteins 0.000 description 1
- 230000001154 acute effect Effects 0.000 description 1
- 230000001174 ascending effect Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000004880 explosion Methods 0.000 description 1
- 238000013213 extrapolation Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000005086 pumping Methods 0.000 description 1
Images


Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41G—WEAPON SIGHTS; AIMING
- F41G9/00—Systems for controlling missiles or projectiles, not provided for elsewhere
- F41G9/02—Systems for controlling missiles or projectiles, not provided for elsewhere for bombing control
Definitions
- the pilot For an aircraft, for example an airplane, launching on a target a projectile propelled or not and without vertical guidance, like a bomb, or else a rocket, the pilot first makes the airplane follow a trajectory d 'very precise attack allowing the bomb to have the desired initial speed, in size and direction, so that the target is on its trajectory.
- the calculator used, to decide on the launch, an algorithm for calculating the time remaining before dropping, depending in particular on the history of the horizontal speeds of the virtual point of impact on the fictitious ground.
- the aircraft had the desired information when the release could only be virtual but no longer had information when it was a question of carrying out the release on the real ground.
- the present invention aims to solve this problem of bomb efficiency.
- the invention relates to a method of the type mentioned above, characterized in that, in the approach phase, and for each of the various positions of the aircraft, an impact angle of the trajectory of the projectile on the horizontal plane containing the target, we compare it to a predetermined value and we do not take into account, for the validation of the distance calculation, only the trajectories having an impact angle reaching said value.
- the projectile is only launched when it can have the desired efficiency. If the launch is delayed, compared to this instant when the desired efficiency would be reached, the trajectory of the aircraft can be adapted so that the mixed trajectory of the projectile continues to allow it to reach the target.
- this travel duration is controlled by the minimum of said distance from the target so that, for each of the various positions, the distance from the target to the trajectory is equal to this minimum, and, before the expiration of said travel time, a transmission time signal of portion of free path portion is transmitted to the projectile.
- the trajectory of the aircraft is fictitiously noted in parallel to itself as long as the aircraft is level, the determination of the position of the target and the calculation of the anticipated virtual trajectories of the projectile are carried out for positions of approach to the fictitious trajectory of the aircraft, then, at from a position of the projectile which can be reached by resource from the actual position of the aircraft and for which it would be within range of the target, an aircraft resource records its actual trajectory and the calculation of its final fictitious trajectory is continued so that it becomes tangent to its actual trajectory at a point beyond which the projectile can be launched.
- this trajectory calculation method it is possible, before the target is within drop range, to perform calculations in an attempt to determine a trajectory of the projectile which reaches the target, that is to say calculate a duration of journey length of free trajectory as a function of the various input, or primary, variables taken into account, such as the speed of the aircraft, the aerodynamic characteristics of the projectiles and the position of the target.
- the algorithm which is looped back, converges the value of various secondary variables, such as the position fictitious aircraft, calculated from input variables and values previous of these secondary variables, towards the optimal value of each.
- the algorithm makes it possible to calculate, with great precision, the optimal trajectory of the projectile and to launch it immediately using the corresponding value of the duration of the course of the free trajectory, immediately available and precise.
- This precision is obtained thanks to the fact that the algorithm has a history of the evolution of the primary and secondary variables and has thus been able to integrate or "smooth" their evolution over time, that is to say eliminate the " measurement or calculation noise.
- the invention also relates to a method of guidance after launch according to the method of launching of the invention, in which, the projectile comprising a data receiver arranged to cooperate, after launch, with a transmitter of the aircraft, we continue, after launch, the calculation of a virtual trajectory of the projectile coinciding with its real trajectory and the corresponding signals of travel time of the free trajectory are transmitted to the projectile.
- the bomb 2 is of the mixed trajectory type, formed by a portion of free trajectory, here of adjustable duration, followed by a portion of trajectory braked, by a parachute in this example.
- a computer 10 (FIG. 3) of the airplane 1 receives information from an inertial unit of the airplane 1, not shown, enabling it to determine a trajectory 5 of the airplane 1. From this trajectory 5, the computer 10 calculates cyclically in an approach phase before launching, using ballistic data of the bomb 2, and for each of various successive approach positions of the aircraft 1, a trajectory 6 of the bomb 2 having the most long range, that is to say having the maximum duration of travel of the portion of free path.
- the trajectory 6 must reach the horizontal plane of the target 3 at a given impact angle A0. Below this value, the effectiveness of the bomb 2 would be reduced and, above this value, the duration of braked fall would be too long, thus restricting the range maximum, essentially depending on the duration in the free trajectory phase.
- the airplane 1 flies, in this example, at low altitude Z, so that the bomb 2 would hit the ground at an impact angle A less than the angle A0, which would only be reached 'after an additional trajectory 6 leading to a horizontal plane 7, at a height H below the ground 4.
- the altitude Z of the airplane 1 is then fictitiously raised from the height H by the computer 10 to define a fictitious trajectory 8 of the airplane 1, parallel to the trajectory 5 as long as the airplane 1 flies in bearing.
- the trajectory 6 of the bomb 2 is then translated vertically upwards and elongated to become a trajectory 9 reaching the ground 4 according to the angle of impact A0.
- the computer 10 cyclically calculates, over time, trajectories like trajectory 91, that is to say assuming that the aircraft 1 will perform a resource maneuver, in order to determine the time when target 3 will be within launch range.
- the computer 10 warns the pilot, and the pilot begins a resource intended increase the actual altitude of the aircraft 1 to have, on the ground 4, the impact angle A0 and increase the range of the bomb 2.
- the computer 10 defines a fictitious trajectory 81 of the airplane 1, connected to the previous fictitious trajectory 8, and which approaches the real ascending trajectory 51 to tangentially connect to it at a point 52.
- a fictitious trajectory 81 of the airplane 1 As shown by two trajectories 91 and 92 of bomb 2, starting from neighboring points 82 and 83 on trajectory 81, the range of bomb 2 increases very rapidly during resource 51.
- a mixed trajectory 93 starting from connection point 52 and formed by a portion of free trajectory 94 followed, after a point 95, by a portion of braked trajectory 96, reaches the target 3 under the angle A0.
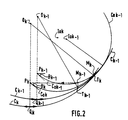
- the final imaginary trajectory 81 of the airplane 1 is determined as follows by the computer 10, with reference to FIG. 2.
- the computer 10 fixes an angle B0 (FIG. 1) on the horizontal, defining the tangent at the beginning of the final fictitious trajectory 81.
- the angle B0 conditions the general curvature of the final fictitious trajectory 81, which thus connects more or less early to the real trajectory 51.
- the value of angle B0, and homologous angles Bk defined later, depends on the load factor of the airplane 1, i.e. the acceleration due to the resource, therefore the shape of the real trajectory 51, and also the ballistic characteristics of the bomb 2.
- a bomb 2 strongly braked in the final phase can be launched at lower altitude than another, while respecting the condition on the impact angle A0, so that the angle B0 can be increased in order to increase the curvature of the final fictitious trajectory 81 so that the connection 52 to the real trajectory 51 takes place earlier, at lower altitude.
- the latter is then constructed by means of a succession of points Mk, k, an integer being the rank of the point, each point being the counterpart of a point Tk of the trajectory actual 51 of aircraft 1.
- the position of the point Mk is determined from the position of the point Mk-1 determined previously and is explained below.
- the altitude of the point Mk-1 is transferred to the vertical of the center Ok of a circle Ck tangent to the trajectory 51 at the point Tk and of the same curvature as the latter at the point Tk, which defines a reference point Pk.
- the computer 10 cyclically calculates trajectories like 91, 92 of the bomb 2 from the points Mk of the fictitious trajectory 81 of the airplane 1.
- the kinematics data of the trajectory 51 of the aircraft 1 are taken into account, through the load factor and the angle Bk, so that the instant of convergence at point 52 corresponds to the angle conditions launching and initial speed of the bomb 2 making it possible to reach the desired impact angle A0, with a fixed duration of travel for the portion of the free trajectory.
- a signal for the start of the firing solution is then sent by the computer 10 to the pilot as soon as the bomb 2 is within range of the target 3 and indicates to him the start of a possible launch pad.
- the pilot can then immediately drop the bomb 2, with the determined duration of travel of the portion of free trajectory. He can also, in the event that he has to drop several bombs 2 in succession, make drops after the start of the firing solution.
- the computer 10 continues the calculations of mixed trajectory 9 and provides, for each possible instant of release, a modified duration of travel of the portion of free trajectory making it possible to reach the target 3 again if the airplane 1 has approached it and modified its instant flight conditions, such as the slope of its resource. In this case, if the virtual range of a bomb 2 is too large, the bomb 2 will be braked on a greater height and will reach target 3 with an impact angle better than that necessary, here between 82 and 90 degrees.
- the computer 10 can also, in this case, provide an indication to the pilot so that he modifies the shape of the resource 51 in order to reduce the maximum possible range until bringing the braked fall height to the minimum value necessary.
- the computer 10 continues its calculations of the mixed trajectory 9 of the bomb 2 and provides an end of fire solution signal when the calculated trajectory 9 of the bomb 2 can no longer satisfy the desired conditions.
- FIG. 3 An algorithm for cyclically calculating the duration of travel of the portion of free trajectory 94 and, thus, determining the trajectory of the bomb 2, is illustrated in FIG. 3.
- All the calculation circuits below belong to the computer 10.
- Information on the kinematics of the aircraft 1, such as speed differences, attitude, aircraft incidence, number of mach, and also air pressure and temperature, arrive cyclically, as indicated above, to the computer 10, on an input 111, and are transmitted to a computer block 11 which determines the trajectory provided for the bomb 2.
- the block 11 also receives an average speed value VMOY in braked phase as well as a TCHFM value of desired braked fall time, calculated as explained below.
- Block 11 which has in memory the characteristics, such as mass and coefficient Cx of aerodynamics, of bomb 2 necessary to calculate its mixed trajectory from its initial launch speed, that of airplane 1, provides in response the value of the calculated impact angle A on the horizontal plane containing the target 3.
- This impact angle value A is applied to the input of a subtractor 12 receiving, on an input 121, the predetermined value setpoint A0.
- a calculation block 13 receives, from the subtractor 12, the value of the deviation, with respect to the set angle A0, from the impact angle A and determines a new time TCHFM of desired braked fall applied, as indicated in calculation block 11.
- the calculation block 13 may contain a conversion table providing a correction value for the desired braked fall time TCHFM as a function of the deviation of the impact angle A, it is advantageous for the block 13 receives, from block 11, the information required for, from the shape of the braked trajectory, to modulate it, in an adapted manner, the length and to adjust the angle A by modulation of the desired TCHFM time of braked fall.
- the time TCHFM of braked fall desired is all the more increased as the difference between impact angle A and setpoint angle A0 is large and, in this advantageous form, the value of this increase is adapted, so that the loop formed by the elements 11, 12 and 13 does not risk "pumping", c that is to say to oscillate around an optimal value which it could not reach.
- Block 11 also provides a signal SAVARR of height, relative to target 3, from the start (95) of the braked phase, taking into account the desired TCHFM time of braked fall, and a signal TEMPCF of braked fall time observed as a result.
- the height signal SAVARR and the time signal TEMPCF are applied to a divider 14 providing in response a signal SAVARR / TEMPCF, representing the ratio of the values corresponding to the two signals above, i.e. the corresponding average speed in the braked phase.
- the signal SAVARR / TEMPCF is applied to the positive input of a subtractor 15 receiving, on a negative input, a signal VMOYP which is the signal VMOY of the preceding calculation cycle.
- the output of the subtractor 15 is applied to a filter 17 of the first order providing a signal of the form: (SAVARR / TEMPCF - VMOYP). K with K: multiplication coefficient of the filter 17.
- the new VMOY signal is obtained by adding, in an adder 18, the signal from the filter 17 and the VMOYP, stored in a delay circuit 16.
- Block 11 thus has, at the input, VMOY speed and TCHFM time signals enabling it to calculate a new desired STOP STOP height of the free trajectory portion of the bomb 2.
- Block 11 determines point 95 of the free trajectory portion 94 having a height on the ground of the same OFF value and, calculating a corrected length of the free trajectory portion 94, it determines the corresponding TB journey time and transmits, from an output terminal 122, a signal of corresponding duration, by a link not shown, to the bomb 2.
- a link, radio for example, can be provided, making it possible to again transmit to the bomb 2, after the launch, the duration signal, which provides additional time to increase the accuracy of the calculation of the mixed trajectory and also makes it possible to take into account an unexpected displacement of the target 3.
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Aiming, Guidance, Guns With A Light Source, Armor, Camouflage, And Targets (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Radar Systems Or Details Thereof (AREA)
Description
- La présente invention concerne, tout d'abord, un procédé de lancement sur une cible et de contrôle, à partir d'un aéronef, d'un projectile non guidé verticalement, à trajectoire mixte, libre puis freinée, dans lequel, dans une phase d'approche avant lancement, et pour chacune de diverses positions d'approche successives de l'aéronef,
- on détermine la position de la cible dans un repère tridimensionnel lié à l'aéronef,
- on calcule, en tenant compte de la vitesse de l'aéronef et dans ledit repère, la trajectoire virtuelle anticipée du projectile, lancé à la position considérée,
- on calcule la distance de la cible à ladite trajectoire virtuelle et
- on lance le projectile juste après que ladite distance ait franchi un minimum.
- Pour, d'un aéronef, par exemple un avion, lancer sur une cible un projectile propulsé ou non et sans guidage vertical, comme une bombe, ou bien une roquette, le pilote fait tout d'abord suivre à l'avion une trajectoire d'attaque bien précise permettant à la bombe d'avoir la vitesse initiale voulue, en grandeur et direction, pour que la cible se trouve sur sa trajectoire.
- Cependant, il est apparu que cette condition ne fournissait pas toujours entière satisfaction, car, lorsque la bombe était larguée à faible altitude, sa trajectoire était trop inclinée sur la verticale, ce qui réduisait son efficacité, si elle explosait, ou la faisait ricocher.
- On a tenté de résoudre ce problème en freinant la bombe au moyen d'un parachute ou d'un empennage déployable en fin de trajectoire, ce qui rapprochait rapidement sa trajectoire de la verticale, pour qu'elle ait un angle d'impact suffisant pour garantir l'efficacité voulue. Il fallait cependant disposer d'une hauteur de chute freinée suffisante.
- Dans le cas d'un largage à moyenne ou haute altitude, il n'était pas non plus certain, en considérant un largage en semi-piqué par exemple, que la trajectoire en chute freinée fût suffisamment longue pour que l'angle d'impact fût suffisant. Inversement, un largage depuis un palier à haute altitude conduisait à une trajectoire en chute freinée relativement longue qui, du fait du vent notamment, était imprécise.
- Un autre problème était de procéder au calcul, avant largage, d'une trajectoire anticipée précise de la bombe, donc du point d'impact virtuel, en fonction de la trajectoire de l'avion et de la durée de la phase "lisse", c'est-à-dire libre et non freinée. Or, dans le cas d'une approche à basse altitude, c'est-à-dire pour un lancement "stand-off" sur coordonnées, sans voir la cible, l'altitude de l'avion est insuffisante pour avoir l'angle d'impact voulu, quand bien même la durée de phase lisse serait minimale. Pour cependant anticiper le calcul de la trajectoire de la bombe, afin, aussi, de la lancer à portée maximale, il était connu de descendre fictivement, par le calcul, le niveau du sol, c'est-à-dire d'effectuer fictivement une approche "sous falaise", jusqu'à ce que la distance entre l'avion et un niveau de sol (ou sous-sol) fictif soit juste suffisante pour que la bombe ait l'angle d'impact voulu sur le sol fictif.
- Lorsque l'avion effectue une ressource de lancement, son altitude croît et le niveau du sol fictif remonte et émerge assez rapidement puisque, en plus de l'altitude accrue, la direction de la vitesse initiale de la bombe est relevée, ce qui accroît encore l'apogée de sa trajectoire prévue, donc améliore l'angle d'impact.
- Le calculateur utilisait, pour décider du lancement, un algorithme de calcul de temps restant avant largage, fonction en particulier de l'historique des vitesses horizontales du point d'impact virtuel sur le sol fictif.
- Or, comme le sol fictif était remplacé, après émergence, par le sol réel, il n'y avait pas d'historique correspondant pour le sol réel et une prédiction par extrapolation était impossible car la variable "sol" présentait, à l'émergence, une forme anguleuse qui se traduisait par une discontinuité de son évolution et rompait l'itération des calculs précédents.
- Ainsi, dans ce procédé de l'art antérieur, l'avion avait les informations voulues quand le largage ne pouvait qu'être virtuel mais ne disposait plus d'informations lorsqu'il s'agissait d'effectuer le largage sur le sol réel.
- Le problème était d'autant plus aigu que la vitesse horizontale du point d'impact au sol correspond à une vitesse d'avance d'un front d'onde calculé, partie terminale de la trajectoire mixte, et qu'il s'agit donc d'une vitesse de phase, c'est-à-dire qui peut nettement dépasser la vitesse réelle de l'avion. Or, c'est le cas dans la phase de ressource, où la portée des bombes croît rapidement de par l'augmentation de leur angle de lancement, si bien que la phase de largage en ressource correspond alors aux plus mauvaises conditions de précision de largage.
- En outre, indépendamment du problème d'efficacité de la bombe lié à l'angle d'impact, une trajectoire anticipée trop horizontale de la bombe présente un point d'impact anticipé au sol dont la position dépend grandement des altitude et attitude instantanées de l'avion, c'est-à-dire que le point d'impact anticipé calculé "avance" de façon très irrégulière vers la cible, ce qui ne permet pas de disposer d'un modèle stable qui permettrait de déterminer une trajectoire anticipée précise de la bombe.
- De ce fait, une bombe larguée pendant la ressource avait une trajectoire mal réglée et perdait ainsi de son efficacité, dans ce cas à cause du fait qu'elle manquait fréquemment la cible.
- La présente invention vise à résoudre ce problème d'efficacité de la bombe.
- A cet effet, l'invention concerne un procédé du type mentionné ci-dessus, caractérisé par le fait que, dans la phase d'approche, et pour chacune des diverses positions de l'aéronef, on calcule un angle d'impact de la trajectoire du projectile sur le plan horizontal contenant la cible, on le compare à une valeur prédéterminée et on ne prend en compte, pour la validation du calcul de distance, que les trajectoires présentant un angle d'impact atteignant ladite valeur.
- Ainsi, le projectile n'est lancé que lorsqu'il peut avoir l'efficacité voulue. Si le lancement est différé, par rapport à cet instant où l'efficacité voulue serait atteinte, la trajectoire de l'aéronef peut être adaptée pour que la trajectoire mixte du projectile continue de lui permettre d'atteindre la cible.
- Avantageusement, si la durée du parcours du projectile sur la portion de trajectoire libre est réglable, on asservit cette durée de parcours par le minimum de ladite distance de la cible pour que, pour chacune des diverses positions, la distance de la cible à la trajectoire soit égale à ce minimum, et, avant l'expiration de ladite durée de parcours, on transmet au projectile un signal de durée de parcours de portion de trajectoire libre.
- C'est donc la trajectoire mixte du projectile qui, en cas de lancement différé, est adaptée automatiquement et non plus celle de l'aéronef, plus difficile à contrôler et contraignante pour le pilote.
- Lorsque se pose le problème de procéder au calcul d'une trajectoire anticipée précise de projectile et que l'aéronef vole à basse altitude, sans que l'angle d'impact atteigne la valeur prédéterminée, on relève fictivement la trajectoire de l'aéronef parallèlement à elle-même tant que l'aéronef vole en palier, la détermination de la position de la cible et le calcul des trajectoires virtuelles anticipées du projectile sont effectués pour des positions d'approche de la trajectoire fictive de l'aéronef, puis, à partir d'une position du projectile pouvant être atteinte par ressource à partir de la position réelle de l'aéronef et pour laquelle il serait à portée de la cible, une ressource de l'aéronef relève sa trajectoire réelle et on poursuit le calcul de sa trajectoire fictive finale pour qu'elle devienne tangente à sa trajectoire réelle en un point au-delà duquel le projectile pourra être lancé.
- On dispose ainsi de résultats de calcul de trajectoire mixte selon un algorithme d'optimisation de la portée et de l'efficacité à l'impact qui, au moment où le lancement devient possible, a déjà convergé sur les conditions réelles de lancement. Le lancement peut donc être effectué à distance maximale.
- Avantageusement, pour déterminer la trajectoire fictive de l'aéronef pendant la ressource, on détermine, pour diverses positions de la trajectoire réelle de la ressource, des positions correspondantes, sur la trajectoire fictive par les étapes suivantes :
- pour chaque position d'approche, on assimile la trajectoire réelle de l'aéronef à un cercle, tangent localement à la trajectoire réelle de l'aéronef et de même courbure que celle-ci en cette position,
- on détermine une position de référence en reportant, sur la verticale du centre dudit cercle, l'altitude de la position de la trajectoire fictive finale de l'aéronef déterminée pour la position précédente,
- on calcule un angle de référence sur l'horizontale, fonction de l'accélération subie par l'aéronef sur sa trajectoire réelle à la position considérée,
- on détermine un cercle de construction, tangent au cercle assimilé, qui passe par ladite position de référence en présentant l'angle de référence et
- la position recherchée sur la trajectoire fictive est déterminée en élevant une verticale passant par la position considérée de la trajectoire réelle jusqu'à son intersection avec le cercle de construction.
- On dispose ainsi d'un algorithme en boucle fournissant une valeur de durée de parcours de la portion de trajectoire libre qui prend en compte le mouvement de l'avion et fait converger l'angle d'impact, ainsi asservi, vers la valeur prédéterminée.
- Le procédé utilisé ci-dessus dans le calcul d'une trajectoire à basse altitude présente un intérêt majeur et la demanderesse entend le revendiquer en tant que tel.
- Grâce à ce procédé de calcul de trajectoire, on peut, avant que la cible soit à portée de largage, effectuer des calculs pour tenter de déterminer une trajectoire du projectile qui atteigne la cible, c'est-à-dire calculer une durée de parcours de tronçon de trajectoire libre en fonction des diverses variables d'entrée, ou primaires, prises en compte, comme la vitesse de l'aéronef, les caractéristiques aérodynamiques des projectiles et la position de la cible.
- Cette condition d'atteinte de la cible n'est évidemment pas réalisée tant que celle-ci est hors de portée, mais, pendant cette phase, l'algorithme, qui est rebouclé, fait converger la valeur de diverses variables secondaires, comme la position fictive de l'aéronef, calculées à partir des variables d'entrée et de valeurs précédentes de ces variables secondaires, vers la valeur optimale de chacune. Ainsi, dès que la cible est à portée, l'algorithme permet de calculer, avec une grande précision, la trajectoire optimale du projectile et de le lancer immédiatement en utilisant la valeur correspondante de durée de parcours de trajectoire libre, immédiatement disponible et précise. Cette précision est obtenue grâce au fait que l'algorithme dispose d'un historique de l'évolution des variables primaires et secondaires et a ainsi pu intégrer ou "lisser" leur évolution dans le temps, c'est-à-dire éliminer le "bruit" de mesure ou de calcul.
- L'invention concerne aussi un procédé de guidage après lancement selon le procédé de lancement de l'invention, dans lequel, le projectile comportant un récepteur de données agencé pour coopérer, après le lancement, avec un émetteur de l'aéronef, on poursuit, après lancement, le calcul d'une trajectoire virtuelle du projectile coïncidant avec sa trajectoire réelle et on transmet au projectile les signaux correspondants de durée de parcours de la trajectoire libre.
- L'invention concerne enfin un procédé de lancement sur une cible et de contrôle, à partir d'un aéronef, d'un projectile non guidé verticalement, à trajectoire mixte, libre puis freinée, dans lequel, dans une phase d'approche avant lancement, et pour chacune de diverses positions d'approche successives de l'aéronef,
- 1- on détermine la position de la cible dans un repère tridimensionnel lié à l'aéronef,
- 2- on calcule, en tenant compte de la vitesse de l'aéronef et dans ledit repère, la trajectoire virtuelle anticipée du projectile, lancé à la position considérée,
- 3- on calcule la distance de la cible à ladite trajectoire virtuelle et
on lance le projectile juste après que ladite distance ait franchi un minimum, - L'invention sera mieux comprise à l'aide de la description suivante du mode préféré de réalisation des procédés de l'invention, en référence au dessin annexé, sur lequel :
- la figure 1 est une vue, dans un plan vertical, de la trajectoire d'un avion, d'une trajectoire fictive associée et de trajectoires prévues d'une bombe,
- la figure 2 illustre la construction de la trajectoire fictive de l'avion selon le procédé de lancement de l'invention et
- la figure 3 est un schéma par blocs illustrant les procédés de l'invention.
- Dans le présent exemple, il s'agit, pour le pilote d'un avion 1 représenté sur la figure 1, de larguer un projectile non guidé verticalement, ici une bombe 2, sur une cible 3, située, ici, sur un sol 4. La bombe 2 est du type à trajectoire mixte, formée d'une portion de trajectoire libre, ici de durée réglable, suivie d'une portion de trajectoire freinée, par un parachute dans cet exemple.
- Un calculateur 10 (figure 3) de l'avion 1 reçoit d'une centrale inertielle de l'avion 1, non représentée, des informations lui permettant de déterminer une trajectoire 5 de l'avion 1. A partir de cette trajectoire 5, le calculateur 10 calcule cycliquement dans une phase d'approche avant lancement, en utilisant des données de balistique de la bombe 2, et pour chacune de diverses positions d'approche successives de l'avion 1, une trajectoire 6 de la bombe 2 ayant la plus grande portée, c'est-à-dire ayant la durée maximale de parcours de la portion de trajectoire libre.
- La trajectoire 6 doit atteindre le plan horizontal de la cible 3 selon un angle d'impact donné A0. En-dessous de cette valeur, l'efficacité de la bombe 2 serait réduite et, au-dessus de cette valeur, la durée de chute freinée serait trop grande, donc restreindrait la portée maximale, dépendant essentiellement de la durée en phase de trajectoire libre.
- Ainsi, sur la figure 1, l'avion 1 vole, dans cet exemple, à basse altitude Z, si bien que la bombe 2 toucherait le sol sous un angle d'impact A inférieur à l'angle A0, qui ne serait atteint qu'après un supplément de la trajectoire 6 aboutissant à un plan horizontal 7, à une hauteur H sous le sol 4.
- Dans ce cas, l'altitude Z de l'avion 1 est alors remontée fictivement de la hauteur H par le calculateur 10 pour définir une trajectoire fictive 8 de l'avion 1, parallèle à la trajectoire 5 tant que l'avion 1 vole en palier. La trajectoire 6 de la bombe 2 est alors translatée verticalement vers le haut et allongée pour devenir une trajectoire 9 atteignant le sol 4 selon l'angle d'impact A0.
- On comprendra que, s'il s'agissait de traiter le problème de la précision de bombardement, indépendamment du problème de l'efficacité de l'explosion de la bombe 2, on procèderait encore de même, mais l'angle A0 correspondrait alors à un seuil permettant de garantir que la trajectoire 9 atteint le sol 4 selon un angle suffisamment élevé pour que le point d'impact prévisionnel soit défini avec une précision déterminée.
- Dans la phase d'approche avant lancement, le calculateur 10 calcule cycliquement, au fil du temps, des trajectoires comme la trajectoire 91, c'est-à-dire en supposant que l'avion 1 effectuera une manoeuvre de ressource, afin de déterminer l'instant auquel la cible 3 va être à portée de lancement. Peu avant cet instant, c'est le calculateur 10 qui en avertit le pilote, et celui-ci commence une ressource ayant pour but d'augmenter l'altitude réelle de l'avion 1 pour avoir, sur le sol 4, l'angle d'impact A0 et accroître la portée de la bombe 2.
- Pendant la ressource, selon une trajectoire 51, le calculateur 10 définit une trajectoire fictive 81 de l'avion 1, raccordée à la trajectoire fictive précédente 8, et qui se rapproche de la trajectoire réelle ascendante 51 pour s'y raccorder tangentiellement en un point 52. Comme le montrent deux trajectoires 91 et 92 de bombe 2, partant de points voisins 82 et 83 sur la trajectoire 81, la portée de la bombe 2 croît très rapidement pendant la ressource 51. Une trajectoire mixte 93 partant du point de raccordement 52, et formée d'une portion de trajectoire libre 94 suivie, après un point 95, d'une portion de trajectoire freinée 96, atteint la cible 3 sous l'angle A0.
- La trajectoire fictive finale 81 de l'avion 1 est déterminée de la façon suivante par le calculateur 10, en référence à la figure 2.
- Tout d'abord, pour raccorder le début de la trajectoire fictive finale 81 à la fin de la trajectoire fictive initiale 8, c'est-à-dire au début de la ressource, le calculateur 10 fixe un angle B0 (figure 1) sur l'horizontale, définissant la tangente au début de la trajectoire fictive finale 81. L'angle B0 conditionne la courbure générale de la trajectoire fictive finale 81, qui se raccorde ainsi plus ou moins tôt à la trajectoire réelle 51. La valeur de l'angle B0, et des angles homologues Bk définis ultérieurement, dépend du facteur de charge de l'avion 1, c'est-à-dire de l'accélération due à la ressource, donc de la forme de la trajectoire réelle 51, et aussi des caractéristiques balistiques de la bombe 2. Ainsi, une bombe 2 fortement freinée en phase finale peut être lancée à plus basse altitude qu'une autre, tout en respectant la condition sur l'angle d'impact A0, si bien que l'angle B0 peut être accru afin d'augmenter la courbure de trajectoire fictive finale 81 pour que le raccordement 52 à la trajectoire réelle 51 ait lieu plus tôt, à plus basse altitude.
- Ayant défini le début de la trajectoire finale 81, cette dernière est ensuite construite au moyen d'une succession de points Mk, k, nombre entier, étant le rang du point, chaque point étant l'homologue d'un point Tk de la trajectoire réelle 51 de l'avion 1.
- Le premier point Mk-1, avec k = 2, est sur la tangente ci-dessus, formant l'angle B0, à la verticale du point homologue de la trajectoire réelle 51.
- La position du point Mk est déterminée à partir de la position du point Mk-1 déterminée précédemment et est exposée ci-dessous.
- L'altitude du point Mk-1 est reportée sur la verticale du centre Ok d'un cercle Ck tangent à la trajectoire 51 au point Tk et de même courbure que celle-ci au point Tk, ce qui définit un point de référence Pk.
- Il est ensuite tracé un cercle de contruction C0k, de centre I0k, tangent au cercle Ck et qui passe par le point Pk en y faisant, avec l'horizontale, l'angle Bk fonction, tout comme l'angle B0, du facteur de charge. Les cercles précédents Ck-1 et C0k-1 de centre 0k-1 et I0k-1 ont été construits selon le même principe. Le point Mk est à l'intersection de la moitié inférieure du cercle C0k par la verticale du point Tk.
- Pendant la ressource, le calculateur 10 calcule cycliquement des trajectoires comme 91, 92 de la bombe 2 à partir des points Mk de la trajectoire fictive 81 de l'avion 1. Lorsque les trajectoires fictive 81 et réelle 51 de l'avion 1 se rencontrent au point 52, cela indique que l'avion 1 a atteint l'altitude suffisante pour larguer la bombe 2 et obtenir l'angle d'impact A0 voulu. On remarquera que les données de cinématique de la trajectoire 51 de l'avion 1 sont prises en compte, à travers le facteur de charge et l'angle Bk, si bien que l'instant de convergence au point 52 correspond aux conditions d'angle de lancement et de vitesse initiale de la bombe 2 permettant d'atteindre l'angle d'impact voulu A0, à durée déterminée de parcours de la portion de trajectoire libre. Un signal de début de solution de tir est alors émis par le calculateur 10 à destination du pilote dès que la bombe 2 est à portée de la cible 3 et lui indique le début d'une plage de lancement possible.
- Le pilote peut alors larguer tout de suite la bombe 2, avec la durée déterminée de parcours de la portion de trajectoire libre. Il peut aussi, dans le cas où il doit larguer successivement plusieurs bombes 2, effectuer des largages après le début de la solution de tir. Le calculateur 10 poursuit les calculs de trajectoire mixte 9 et fournit, pour chaque instant possible de largage, une durée modifiée de parcours de la portion de trajectoire libre permettant d'atteindre encore la cible 3 si l'avion 1 s'en est rapproché et a modifié ses conditions instantanées de vol, telles que la pente de sa ressource. Dans ce cas, si la portée virtuelle d'une bombe 2 est trop grande, la bombe 2 sera freinée sur une plus grande hauteur et atteindra la cible 3 avec un angle d'impact meilleur que celui nécessaire, ici entre 82 et 90 degrés.
- Le calculateur 10 peut aussi, dans ce cas, fournir une indication au pilote pour qu'il modifie la forme de la ressource 51 afin de réduire la portée maximale possible jusqu'à ramener la hauteur de chute freinée à la valeur minimale nécessaire.
- Dans la phase de ressource, le calculateur 10 poursuit ses calculs de trajectoire mixte 9 de la bombe 2 et fournit un signal de fin de solution de tir lorsque la trajectoire calculée 9 de la bombe 2 ne peut plus satisfaire aux conditions voulues.
- Dans le cas où, contrairement à cet exemple, l'approche aurait été fait à moyenne ou haute altitude, il n'aurait pas été nécessaire de définir une trajectoire fictive 81, mais, comme indiqué ci-dessus, le calculateur 10 fournirait une indication, utilisée dans l'algorithme, pour réduire une hauteur de chute freinée excessive.
- Un algorithme pour calculer cycliquement la durée de parcours de la portion de trajectoire libre 94 et, ainsi, déterminer la trajectoire de la bombe 2, est illustré par la figure 3.
- L'ensemble des circuits de calcul ci-dessous appartient au calculateur 10. Des informations de cinématique de l'avion 1, telles que écarts de vitesse, attitude, incidence avion, nombre de mach, et aussi pression et température de l'air, parviennent cycliquement, comme indiqué précédemment, au calculateur 10, sur une entrée 111, et sont transmises à un bloc de calcul 11 qui en détermine la trajectoire prévue pour la bombe 2. Le bloc 11 reçoit aussi une valeur de vitesse moyenne VMOY en phase freinée ainsi qu'une valeur TCHFM de temps de chute freinée désiré, calculées comme expliqué plus loin.
- Le bloc 11, qui a en mémoire les caractéristiques, telles que masse et coefficient Cx d'aérodynamisme, de la bombe 2 nécessaires pour calculer sa trajectoire mixte à partir de sa vitesse initiale de lancement, celle de l'avion 1, fournit en réponse la valeur de l'angle d'impact calculé A sur le plan horizontal contenant la cible 3. Cette valeur d'angle d'impact A est appliquée à l'entrée d'un soustracteur 12 recevant, sur une entrée 121, la valeur prédéterminée de consigne A0.
- Un bloc de calcul 13 reçoit, du soustracteur 12, la valeur de l'écart, par rapport à l'angle de consigne A0, de l'angle d'impact A et en détermine un nouveau temps TCHFM de chute freinée désiré appliqué, comme indiqué, au bloc de calcul 11.
- On comprendra que, bien que le bloc de calcul 13 puisse contenir une table de conversion fournissant une valeur de correction du temps TCHFM de chute freinée désiré en fonction de l'écart de l'angle d'impact A, il est avantageux que le bloc 13 reçoive, du bloc 11, les informations voulues pour, à partir de la forme de la trajectoire freinée, en moduler, de façon adaptée, la longueur et régler l'angle A par modulation du temps TCHFM de chute freinée désiré. Ainsi par exemple, si l'angle d'impact A est insuffisant, le temps TCHFM de chute freinée désiré est d'autant plus accru que l'écart entre angle d'impact A et angle de consigne A0 est grand et, dans cette forme avantageuse, la valeur de cet accroissement est adaptée, si bien que la boucle formée des éléments 11, 12 et 13 ne risque pas de "pomper", c'est-à-dire osciller autour d'une valeur optimale qu'elle ne pourrait pas atteindre.
- Le bloc 11 fournit aussi un signal SAVARR de hauteur, par rapport à la cible 3, du début (95) de la phase freinée, tenant compte du temps TCHFM de chute freinée désiré, et un signal TEMPCF de temps de chute freinée constaté en résultant. Le signal de hauteur SAVARR et le signal de temps TEMPCF sont appliqués à un diviseur 14 fournissant en réponse un signal SAVARR/TEMPCF, représentant le rapport des valeurs correspondant aux deux signaux ci-dessus, c'est-à-dire la vitesse moyenne correspondante dans la phase freinée.
- Le signal SAVARR/TEMPCF est appliqué à l'entrée positive d'un soustracteur 15 recevant, sur une entrée négative, un signal VMOYP qui est le signal VMOY du cycle de calcul précédent. La sortie du soustracteur 15 est appliquée à un filtre 17 du premier ordre fournissant un signal de la forme :

- Le nouveau signal VMOY est obtenu par addition, dans un additionneur 18, du signal issu du filtre 17 et du VMOYP, mémorisé dans un circuit à retard 16.
- Le bloc 11 dispose ainsi, en entrée, des signaux de vitesse VMOY et de temps TCHFM lui permettant de calculer une nouvelle hauteur d'arrêt ARRET désirée de la portion de trajectoire libre de la bombe 2. Le bloc 11 en détermine alors le point 95 de la portion de trajectoire libre 94 ayant une hauteur au sol de même valeur ARRET et, calculant une longueur corrigée de la portion de trajectoire libre 94, il détermine la durée de parcours TB correspondante et transmet, à partir d'une borne de sortie 122, un signal de durée correspondant, par une liaison non représentée, à la bombe 2. Il peut être prévu une liaison, radio par exemple, permettant de transmettre encore à la bombe 2, après le lancement, le signal de durée, ce qui offre un délai supplémentaire pour augmenter la précision du calcul de trajectoire mixte et permet aussi de prendre en compte un déplacement imprévu de la cible 3.
Claims (9)
- Procédé de lancement sur une cible et de contrôle (3), à partir d'un aéronef (1), d'un projectile (2) non guidé verticalement, à trajectoire (6 ; 93) mixte, libre (94) puis freinée (96), dans lequel, dans une phase d'approche avant lancement, et pour chacune de diverses positions (5, 51) d'approche successives de l'aéronef (1),1- on détermine la position de la cible (3) dans un repère tridimensionnel lié à l'aéronef (1),2- on calcule, en tenant compte de la vitesse de l'aéronef (1) et dans ledit repère, la trajectoire virtuelle anticipée (6) du projectile (2), lancé à la position (5, 51) considérée,3- on calcule la distance de la cible (3) à ladite trajectoire virtuelle (6) etcaractérisé par le fait que, dans la phase d'approche, et pour chacune des diverses positions (5, 51) de l'aéronef (1), on calcule un angle d'impact (A) de la trajectoire (6) du projectile (2) sur le plan horizontal contenant la cible (3), on le compare à une valeur prédéterminée (A0) et on ne prend en compte, pour la validation du calcul de distance, que les trajectoires (6) présentant un angle d'impact (A) atteignant ladite valeur (A0).
on lance (T1, T2) le projectile (2) juste après que ladite distance ait franchi un minimum, - Procédé selon la revendication 1, dans lequel, la durée du parcours (TB) du projectile (2) sur la portion de trajectoire libre (94) étant réglable, on asservit cette durée de parcours (TB) par le minimum de ladite distance de la cible (3) pour que, pour chacune des diverses positions (5, 51), la distance de la cible (3) à la trajectoire (93) soit égale à ce minimum, et, avant l'expiration de ladite durée de parcours (TB), on transmet au projectile (2) un signal de durée de parcours de portion de trajectoire libre (94).
- Procédé selon l'une des revendications 1 et 2, dans lequel, la trajectoire réelle (5) de l'aéronef (1) étant trop basse pour que le projectile (2) puisse atteindre la cible (3) selon l'angle d'impact prédéterminé (A0), on relève (8) fictivement la trajectoire (5) de l'aéronef (1) parallèlement à elle-même tant que l'aéronef (1) vole en palier, la détermination de la position de la cible (3) et le calcul des trajectoires virtuelles anticipées (6 ; 9) du projectile (2) sont effectués pour des positions d'approche de la trajectoire fictive de l'aéronef (1), puis, après détermination d'une position du projectile (2) pouvant être atteinte par ressource à partir de la position réelle de l'aéronef (1) et pour laquelle il serait à portée de la cible (3), une ressource de l'aéronef (1) relève sa trajectoire réelle (5) et on poursuit le calcul de sa trajectoire fictive finale (81) pour qu'elle devienne tangente à sa trajectoire réelle (51) en un point (52) au-delà duquel le projectile (2) pourra être lancé.
- Procédé selon la revendication 3, dans lequel, pour déterminer la trajectoire fictive (81) de l'aéronef (1) pendant la ressource (51), on détermine, pour diverses positions (Tk) de la trajectoire réelle de la ressource (51), des positions correspondantes (Mk) sur la trajectoire fictive (81) par les étapes suivantes :- pour chaque position d'approche (Tk), on assimile la trajectoire réelle (51) de l'aéronef (1) à un cercle (Ck), tangent localement à la trajectoire réelle (51) de l'aéronef (1) et de même courbure que celle-ci en cette position (Tk),- on détermine une position de référence (Pk) en reportant, sur la verticale du centre (0k) dudit cercle (Ck), l'altitude de la position (Mk-1) de la trajectoire fictive finale (81) de l'aéronef (1) déterminée pour la position précédente (Tk-1),- on calcule un angle de référence (Bk) sur l'horizontale, fonction de l'accélération subie par l'aéronef (1) sur sa trajectoire réelle (51) à la position (Tk) considérée,- on détermine un cercle de construction (C0k), tangent au cercle (Ck) assimilé, qui passe par ladite position de référence (Pk) en présentant l'angle de référence (Bk) et- la position recherche (Mk) sur la trajectoire fictive (81) est déterminée en élevant une verticale passant par la position considérée (Tk) de la trajectoire réelle (51) jusqu'à son intersection avec le cercle de construction (C0k).
- Procédé selon l'une des revendications 1 à 4, dans lequel on détermine, lors de la comparaison de l'angle d'impact (A) et de la valeur prédéterminée (A0), un écart d'angle d'impact, on modifie en conséquence la longueur de la trajectoire freinée (96), pour réduire l'écart d'angle d'impact, en déterminant une durée corrigée de parcours désirée (TCHFM) d'une nouvelle trajectoire freinée (96) présentant un angle d'impact ayant la valeur prédéterminée (A0) et on en déduit une durée corrigée correspondante (TB) de parcours d'une nouvelle trajectoire libre (94).
- Procédé selon la revendication 5, dans lequel- on calcule cycliquement, en fonction de ladite durée corrigée de parcours désirée (TCHFM) de la trajectoire freinée (96) et d'une vitesse moyenne filtrée (VMOY) du projectile (2) au cours de la trajectoire freinée (96), une hauteur (ARRET) de chute freinée pour la nouvelle trajectoire (93),- par comparaison de la hauteur (ARRET) de chute freinée avec des hauteurs de points successifs de la nouvelle trajectoire libre (94), on détermine une longueur et ladite durée corrigée (TB) de parcours de la nouvelle trajectoire libre (94),- on détermine, à partir de la nouvelle trajectoire (93), une hauteur (SAVARR) et une durée (TEMPCF) de chute freinée résultantes, pour la nouvelle trajectoire freinée (96), et on en calcule une valeur de vitesse moyenne (SAVARR/TEMPCF) de parcours de la nouvelle trajectoire freinée (96) et- on combine, pour obtenir une nouvelle vitesse moyenne filtrée (VMOY) destinée à un cycle ultérieur, ladite valeur de vitesse moyenne (SAVARR/TEMPCF) de parcours de la nouvelle trajectoire freinée (96) et une valeur de vitesse moyenne filtrée (VMOYP) calculée lors du cycle précédent.
- Procédé de guidage, après lancement selon le procédé de l'une des revendications 1 à 6, d'un projectile sur une cible (3), dans lequel, le projectile (2) comportant un récepteur de données agencé pour coopérer, après le lancement, avec un émetteur de l'aéronef (1), on poursuit, après lancement, le calcul d'une trajectoire virtuelle (93) du projectile (2) coïncidant avec sa trajectoire réelle et on transmet au projectile (2) les signaux correspondants de durée de parcours de la trajectoire libre (94).
- Procédé de lancement sur une cible et de contrôle (3), à partir d'un aéronef (1), d'un projectile (2) non guidé verticalement, à trajectoire (6 ; 93) mixte, libre (94) puis freinée (96), dans lequel, dans une phase d'approche avant lancement, et pour chacune de diverses positions (5,51) d'approche successives de l'aéronef (1),1- on détermine la position de la cible (3) dans un repère tridimensionnel lié à l'aéronef (1),2- on calcule, en tenant compte de la vitesse de l'aéronef (1) et dans ledit repère, la trajectoire virtuelle anticipée (6) du projectile (2), lancé à la position (5, 51) considérée,3- on calcule la distance de la cible (3) à ladite trajectoire virtuelle (6) etcaractérisé par le fait que, lorsque la trajectoire réelle de l'aéronef (1) est trop basse pour calculer, avec une précision déterminée, la trajectoire virtuelle anticipée du projectile (2) et en calculer ladite distance, on relève (8) fictivement la trajectoire (5) de l'aéronef (1) parallèlement à elle-même tant que l'aéronef (1) vole en palier, la détermination de la position de la cible (3) et le calcul des trajectoires virtuelles anticipées (6 ; 9) du projectile (2) sont effectués pour des positions d'approche de la trajectoire fictive de l'aéronef (1), puis, après détermination d'une position du projectile (2) pouvant être atteinte par ressource à partir de la position réelle de l'aéronef (1) et pour laquelle il serait à portée de la cible (3), une ressource de l'aéronef (1) relève sa trajectoire réelle (5) et on poursuit le calcul de sa trajectoire fictive finale (81) pour qu'elle devienne tangente à sa trajectoire réelle (51) en un point (52) au-delà duquel le projectile (2) pourra être lancé.
on lance (T1, T2) le projectile (2) juste après que ladite distance ait franchi un minimum, - Procédé selon la revendication 8, dans lequel, pour déterminer la trajectoire fictive (81) de l'aéronef (1) pendant la ressource (51), on détermine, pour diverses positions (Tk) de la trajectoire réelle de la ressource (51), des positions correspondantes (Mk) sur la trajectoire fictive (81) par les étapes suivantes :- pour chaque position d'approche (Tk), on assimile la trajectoire réelle (51) de l'aéronef (1) à un cercle (Ck), tangent localement à la trajectoire réelle (51) de l'aéronef (1) et de même courbure que celle-ci en cette position (Tk),- on détermine une position de référence (Pk) en reportant, sur la verticale du centre (0k) dudit cercle (Ck), l'altitude de la position (Mk-1) de la trajectoire fictive finale (81) de l'aéronef (1) déterminée pour la position précédente (Tk-1),- on calcule un angle de référence (Bk) sur l'horizontale, fonction de l'accélération subie par l'aéronef (1) sur sa trajectoire réelle (51) à la position (Tk) considérée,- on détermine un cercle de construction (C0k), tangent au cercle (Ck) assimilé, qui passe par ladite position de référence (Pk) en présentant l'angle de référence (Bk) et- la position recherchée (Mk) sur la trajectoire fictive (81) est déterminée en élevant une verticale passant par la position considérée (Tk) de la trajectoire réelle (51) jusqu'à son intersection avec le cercle de construction (C0k).
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR9301094 | 1993-02-02 | ||
| FR9301094A FR2701104B1 (fr) | 1993-02-02 | 1993-02-02 | Procédé de lancement et de contrôle d'un projectile à partir d'un aéronef et procédé de son guidage après lancement. |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0610128A1 EP0610128A1 (fr) | 1994-08-10 |
| EP0610128B1 true EP0610128B1 (fr) | 1997-07-23 |
Family
ID=9443624
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP94400208A Expired - Lifetime EP0610128B1 (fr) | 1993-02-02 | 1994-02-01 | Procédé de lancement et de contrÔle d'un projectile à partir d'un aéronef et procédé de son guidage après lancement |
Country Status (7)
| Country | Link |
|---|---|
| EP (1) | EP0610128B1 (fr) |
| CZ (1) | CZ21894A3 (fr) |
| DE (1) | DE69404335T2 (fr) |
| ES (1) | ES2107142T3 (fr) |
| FR (1) | FR2701104B1 (fr) |
| PL (1) | PL302108A1 (fr) |
| ZA (1) | ZA94638B (fr) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19753752C1 (de) * | 1997-12-04 | 1999-07-29 | Eurocopter Deutschland | Vorrichtung und Verfahren zur Bestimmung des Auftreffpunkts eines ballistischen Flugkörpers |
| FR2870608B1 (fr) * | 2004-05-18 | 2006-08-11 | Airbus France Sas | Procede et dispositif de guidage d'un aeronef pour l'aide au parachutage |
| CN117109374B (zh) * | 2023-09-12 | 2025-12-12 | 天津津航计算技术研究所 | 一种基于双机协同背景下的飞行器激光制导照射方法 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SE327933B (fr) * | 1969-07-09 | 1970-08-31 | Saab Ab | |
| US4121246A (en) * | 1976-09-27 | 1978-10-17 | The Boeing Company | Ground impact point prediction system concept for airdrops |
| FR2681676B1 (fr) * | 1991-09-24 | 1993-11-05 | Thomson Brandt Armements | Procede de largage d'une munition a dispositif de freinage retarde, et munition pour la mise en óoeuvre du procede. |
| FR2681675B1 (fr) * | 1991-09-24 | 1993-11-05 | Thomson Brandt Armements | Procede de largage multimode de munition a commande de freinage differe, et munition pour la mise en óoeuvre du procede. |
-
1993
- 1993-02-02 FR FR9301094A patent/FR2701104B1/fr not_active Expired - Fee Related
-
1994
- 1994-01-31 ZA ZA94638A patent/ZA94638B/xx unknown
- 1994-02-01 EP EP94400208A patent/EP0610128B1/fr not_active Expired - Lifetime
- 1994-02-01 PL PL94302108A patent/PL302108A1/xx unknown
- 1994-02-01 CZ CZ94218A patent/CZ21894A3/cs unknown
- 1994-02-01 DE DE69404335T patent/DE69404335T2/de not_active Expired - Fee Related
- 1994-02-01 ES ES94400208T patent/ES2107142T3/es not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| DE69404335T2 (de) | 1998-01-29 |
| CZ21894A3 (en) | 1994-08-17 |
| ZA94638B (en) | 1994-09-26 |
| FR2701104B1 (fr) | 1995-04-07 |
| ES2107142T3 (es) | 1997-11-16 |
| DE69404335D1 (de) | 1997-09-04 |
| EP0610128A1 (fr) | 1994-08-10 |
| PL302108A1 (en) | 1994-08-08 |
| FR2701104A1 (fr) | 1994-08-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2551836B1 (fr) | Procédé et dispositif de gestion optimisée de la trajectoire verticale d'un aéronef | |
| EP0028966A1 (fr) | Procédé de pilotage et de guidage de projectiles en phase terminale de vol | |
| EP2644240B1 (fr) | Estimateur d'altitude pour drone à voilure tournante à rotors multiples | |
| CA2431361C (fr) | Procede et dispositif de commande automatique de la deceleration d'un aeronef en phase de roulement | |
| FR2642515A1 (fr) | Procede de defense antiaerienne | |
| EP2498159A1 (fr) | Procédé pour optimiser l'atterrissage d'un aéronef sur une piste. | |
| EP0775953B1 (fr) | Procédé de pilotage à basse altitude | |
| EP1540436A1 (fr) | Systeme d'assistance au pilotage de l'altitude et de la vitesse horizontale, perpendiculaire a l'aplomb, d'un aeronef et aeronefs equipes de ce systeme. | |
| WO2010007235A1 (fr) | Adaptation d'alertes de terrain sélectives, en fonction de la manoeuvrabilité instantanée d'un giravion | |
| EP3260945A1 (fr) | Drone comprenant des ailes portantes | |
| EP1564527B1 (fr) | Procédé et dispositif de calcul d'une vitesse de consigne pour un aéronef | |
| EP0610128B1 (fr) | Procédé de lancement et de contrÔle d'un projectile à partir d'un aéronef et procédé de son guidage après lancement | |
| EP1591854A1 (fr) | Procédé d'aide au décollage d'un aéronef | |
| FR2565198A1 (fr) | Systeme de commande pour appareils volants a propulsion par reaction | |
| FR2785381A1 (fr) | Procede et dispositif pour permettre l'execution, par un vehicule, d'un virage rapide dans un milieu fluide | |
| EP0610129B1 (fr) | Procédé de lancement et de contrÔle, à partir d'un véhicule mobile, d'un projectile non guidé verticalement et à trajectoire freinée | |
| FR2459955A1 (fr) | Nouveau systeme de pilotage de missile et missile pilote | |
| FR2611886A1 (fr) | Procede et dispositif de determination autonome d'une reference intertielle d'assiette a bord d'un projectile guide | |
| FR3113166A1 (fr) | Procédé et système de décollage automatique d’un aéronef | |
| EP1719969A1 (fr) | Procédé de commande d'une munition ou sous-munition, systèm d'attaque, munition et désignateur mettant en oeuvre un tel procédé | |
| US4819561A (en) | Sensor for attacking helicopters | |
| EP0062563B1 (fr) | Procédé de pilotage en facteur de charge d'un missile et systèmes d'armes correspondants | |
| FR2681675A1 (fr) | Procede de largage multimode de munition a commande de freinage differe, et munition pour la mise en óoeuvre du procede. | |
| WO2018154191A1 (fr) | Procédé et dispositif de surveillance de l'intégrité d'une trajectoire d'un engin volant, spatial ou aérien | |
| FR2681676A1 (fr) | Procede de largage d'une munition a dispositif de freinage retarde, et munition pour la mise en óoeuvre du procede. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): BE DE ES GB IT SE |
|
| 17P | Request for examination filed |
Effective date: 19950111 |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| 17Q | First examination report despatched |
Effective date: 19961030 |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): BE DE ES GB IT SE |
|
| ITF | It: translation for a ep patent filed | ||
| REF | Corresponds to: |
Ref document number: 69404335 Country of ref document: DE Date of ref document: 19970904 |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) |
Effective date: 19970924 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2107142 Country of ref document: ES Kind code of ref document: T3 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: IF02 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20050118 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20050125 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20050208 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20050214 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: BE Payment date: 20050309 Year of fee payment: 12 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20060201 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20060202 Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20060202 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20060228 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20060228 Year of fee payment: 13 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20060901 |
|
| EUG | Se: european patent has lapsed | ||
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20060201 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20060202 |
|
| BERE | Be: lapsed |
Owner name: SOC. D'APPLICATIONS GENERALES D'ELECTRICITE ET DE Effective date: 20060228 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20070201 |